Как работает ультразвуковой датчик HC-SR04. Каковы его основные характеристики и параметры. Где применяется HC-SR04 в робототехнике и электронных проектах. Как правильно подключить и использовать этот датчик расстояния.
Принцип работы ультразвукового датчика HC-SR04
Ультразвуковой датчик HC-SR04 работает по принципу эхолокации. Он состоит из двух основных элементов:
- Ультразвукового передатчика (излучателя)
- Ультразвукового приемника
Принцип работы датчика включает следующие этапы:
- На вход Trig подается короткий импульс длительностью 10 мкс
- Передатчик излучает 8 ультразвуковых импульсов частотой 40 кГц
- Ультразвуковая волна отражается от препятствия и возвращается к датчику
- Приемник фиксирует отраженную волну
- На выходе Echo формируется импульс, длительность которого пропорциональна расстоянию до объекта
Зная скорость распространения звука в воздухе, можно рассчитать расстояние до препятствия по формуле:
Расстояние = (Длительность импульса Echo * Скорость звука) / 2

Деление на 2 необходимо, так как звуковая волна проходит путь до объекта и обратно.
Основные характеристики HC-SR04
Ультразвуковой датчик HC-SR04 обладает следующими техническими параметрами:
- Напряжение питания: 5В
- Рабочий ток: 15 мА
- Частота ультразвука: 40 кГц
- Максимальная дальность: 4 м
- Минимальная дальность: 2 см
- Точность измерения: 3 мм
- Эффективный угол измерения: 15°
- Размеры: 45x20x15 мм
Какие преимущества дают эти характеристики при использовании HC-SR04 в проектах робототехники и электроники.
Применение ультразвукового датчика HC-SR04
Благодаря своей простоте и доступности, HC-SR04 широко используется в различных проектах:
- Измерение расстояния в роботах для обхода препятствий
- Системы автоматической парковки автомобилей
- Охранные системы и датчики движения
- Автоматическое управление дверьми и воротами
- Измерение уровня жидкости в резервуарах
- Интерактивные арт-инсталляции
Рассмотрим подробнее применение HC-SR04 в робототехнике для обхода препятствий.
Подключение HC-SR04 к микроконтроллеру
Для работы с ультразвуковым датчиком HC-SR04 необходимо подключить его к микроконтроллеру по следующей схеме:

- VCC — к питанию 5В
- GND — к общему проводу (земле)
- Trig — к цифровому выходу микроконтроллера
- Echo — к цифровому входу микроконтроллера
При подключении важно соблюдать следующие правила:
- Подключать датчик только при отключенном питании
- Первым подключать провод GND
- Использовать резистор 1-10 кОм на линии Echo
Правильное подключение обеспечит корректную и стабильную работу датчика.
Программирование HC-SR04 на Arduino
Для работы с ультразвуковым датчиком HC-SR04 на платформе Arduino можно использовать следующий базовый код:
«`cpp const int trigPin = 9; const int echoPin = 10; long duration; int distance; void setup() { pinMode(trigPin, OUTPUT); pinMode(echoPin, INPUT); Serial.begin(9600); } void loop() { digitalWrite(trigPin, LOW); delayMicroseconds(2); digitalWrite(trigPin, HIGH); delayMicroseconds(10); digitalWrite(trigPin, LOW); duration = pulseIn(echoPin, HIGH); distance = duration * 0.034 / 2; Serial.print(«Distance: «); Serial.print(distance); Serial.println(» cm»); delay(500); } «`Этот код инициализирует пины для работы с датчиком, отправляет ультразвуковой импульс и измеряет время его возвращения. Затем рассчитывается расстояние и выводится в Serial Monitor.

Ограничения и особенности работы HC-SR04
При использовании ультразвукового датчика HC-SR04 следует учитывать некоторые ограничения:
- Неточные измерения на расстояниях менее 2 см
- Ошибки при измерении мягких или пористых поверхностей
- Влияние температуры и влажности на точность измерений
- Возможные помехи от других ультразвуковых устройств
Чтобы минимизировать влияние этих факторов, рекомендуется:
- Использовать фильтрацию и усреднение результатов измерений
- Учитывать температуру окружающей среды при расчетах
- Располагать датчик перпендикулярно измеряемой поверхности
- Избегать использования нескольких датчиков в непосредственной близости
Соблюдение этих рекомендаций позволит повысить точность и надежность измерений с помощью HC-SR04.
Альтернативы HC-SR04 и сравнение с другими датчиками
Хотя HC-SR04 является популярным выбором, существуют и другие варианты ультразвуковых датчиков:
- US-015 — имеет большую дальность измерения (до 7 м)
- JSN-SR04T — водонепроницаемая версия для использования вне помещений
- HC-SR05 — улучшенная версия с более широким углом обзора
Как HC-SR04 соотносится с другими типами датчиков расстояния.

Сравнение с инфракрасными датчиками:
- Преимущества HC-SR04:
- Не зависит от цвета и отражающей способности поверхности
- Работает при солнечном свете
- Недостатки:
- Более низкая частота обновления данных
- Больший размер
Сравнение с лазерными дальномерами:
- Преимущества HC-SR04:
- Более низкая стоимость
- Простота использования
- Недостатки:
- Меньшая точность и дальность измерения
- Более широкий угол измерения
Выбор конкретного датчика зависит от требований проекта, бюджета и условий эксплуатации.
Заключение
Ультразвуковой датчик HC-SR04 представляет собой доступное и эффективное решение для измерения расстояния в различных проектах робототехники и электроники. Его простота использования, низкая стоимость и достаточная точность делают его популярным выбором для начинающих и опытных разработчиков.
Ключевые выводы:
- HC-SR04 работает по принципу эхолокации, измеряя время возврата ультразвукового сигнала
- Датчик имеет диапазон измерения от 2 см до 4 м с точностью около 3 мм
- Широко применяется в робототехнике, системах автоматизации и интерактивных проектах
- Легко интегрируется с платформами на базе Arduino и других микроконтроллеров
- При правильном использовании и учете ограничений обеспечивает надежные результаты измерений
Освоение работы с HC-SR04 открывает широкие возможности для создания интерактивных и автономных устройств, способных воспринимать окружающее пространство и взаимодействовать с ним.

Разработка радиолокатора с использованием HC-SR04 и Arduino ||Arduino-diy.com
С появлением Arduino, идея о системе ультразвукового зрения не покидают многих.
Оказывается, не только подводные лодки и и физики могут использовать ультразвуковые волны в своих корыстных (и не очень) целях. Если раньше вы могли только фантазировать и мечтать о подобном, то сейчас пора откопать ваш Arduino и ультразвуковой датчик расстояния и приняться за создание ультразвукового локатора своими руками! В статье подробно описана конструкция и особенности ультразвукового эхолокатора на Arduino. Отдельное внимание уделено визуализации измерений. Данный материал не является инструкцией по изготовлению подобного эхолокатора (исходников кода не прилагается), но полностью описывает алгоритм разработки механической части и программного обеспечения.
Необходимые компоненты
- Arduino Uno
- Сервомоторы SM-S4303R
- Источник питания 5 В DC
- Модуль HC-SR04 — ультразвуковой датчик расстояния
- Металлический конструктор — для механической части проекта
- Макетная плата и проводники
- Компьютер с USB кабелем для передачи о обработки данных
- Ну и всякая мелочевка.
 ..
..
 ..
.. В проекте использовались сервомоторы SM-S4303R, которые обеспечивают вращение ротора без ограничения угла поворота. Не самый популярный ход, но зато процесс разработки становится гораздо интереснее.
Видео завершенного эхолокатора с использованием ультразвукового датчика расстояния и Arduino приведено ниже:
Теоретическая база
Радар (radar (radio detection and ranging)) работает по принципу излучения и получения коротких импульсов электромагнитной радиации. Он отправляет радиоволну в заданном направлении в пространстве. Когда эта волна достигает объекта, она отражается от объекта и поступает обратно на радар, который отслеживает время, которое прошло с момента генерации импульса. Если знать, с какой скоростью электромагнитный импульс распространяется в той или иной окружающей среде (спойлер: в воздухе скорость составляет около 300,000 км или около 7,5 раз вокруг Земли за одну секунду), можно рассчитать расстояние до преграды, от которой он отразился. Это расстояние составит половину рассчитанного пути волны (так как импульс перемещается от радара к объекту и потом обратно на радар).
Это расстояние составит половину рассчитанного пути волны (так как импульс перемещается от радара к объекту и потом обратно на радар).
Сонар (sonar (sound navigation and ranging)) работает по тому же принципу, что и радар, но использует короткие звуковые импульсы (“pings”). В основном сонары используются на подводных кораблях и субмаринах. Дельфины и летающие мыши используют тот же принцим для обнаружения препятствий.
HC-SR04 — это дешевый ультразвуковой датчик расстояния, который работает по принципу, описанному выше. Он излучает короткие ультразвуковые импульсы и измеряет время, через которое импульс вернется обратно. В зависимости от времени и скорости звука (около 340 метров в секунду) можно рассчитать расстояние до объекта, от которого отразилась ультразвуковая волна.
После получения отраженного импульса, выход сенсора переключается с 0 В (low) на +5 В (high). Выход остается в режиме high, пока приемник (ресивер) не обнаружит первый отраженный сигнал. После этого происходит перезагрузка и устанавливается режим low. Таким образом, время, пока выход находится в состоянии high, равно времени распространени звуковой волны до преграды и обратно.
Таким образом, время, пока выход находится в состоянии high, равно времени распространени звуковой волны до преграды и обратно.
Давайте взглянем на чудесную улыбку готового радиолокатора. Синяя плата сверху — это ультразвуковой датчик расстояния. Левая часть — это ультразвуковой эмиттер (излучатель ультразвуковых волн), а правая часть — ресивер (приемник ультразвуковых волн).
В даташите нашего ультразвуковой сенсора указано, что угол излучаемой волны составляет около 30°, так что для того, чтобы обнаружить объекты на 360 градусов, нам надо обеспечить его вращение. Для этого нам понадобится вращающаяся платформа с серводвигателем в основании.
Сервы — это двигатели, которые управляются электрическими импульсами. Можно выделить два типа серводвигателей: те, которые вращаются без ограничений и те, у которых ротор перемещается с заранее предусмотренным «шагом». Управлять углом поворота последних можно с помощью подачи электрического импульса определенной длины. Если сервомотор получает на вход импульс, который интерпретируется как поворот на, угол, скажем, 90°, ротор выйдет в позицию 90° и остановится. Серводвигатели, которые вращаются без ограничений могут управляться по скорости вращения и направлению с помощью той же длины импульса.
Серводвигатели, которые вращаются без ограничений могут управляться по скорости вращения и направлению с помощью той же длины импульса.
В принципе, серводвигатель с управлением по углу поворота ротора — более практичный вариант для сканирующего радиолокатора. Вы можете обеспечить поворот выходного вала, например, на 5°, снять показания, передать информацию о расстоянии до объекта на ваш контроллер или персональный компьютер, сделать еще один поворот и так далее… В этом проекте используется серводвигатель с постоянным вращением ротора, которому нельзя передать данные для выхода в конкретное положение без дополнительной обвязки. Один из вариантов — подключить к валу серводвигателя потенциометр и контролировать показания с него. Сопротивление на выходе потенциометра можно преобразовать в угол поворота вала. Но в данном случае реализуется другой вариант: в этом случае контролируется скорость вращения вала двигателя и рассчитывается угол в зависимости от скорости. Конструктивное исполнения самого механизма радиолокатора показана на рисунке ниже:
Красный диск прикреплен к оси, которая обеспечивает вращение ультразвукового датчика расстояния.:strip_exif():quality(90)/files/products/487/2983/081611.jpg) К диску прикреплена пружина от шариковой ручки. Пружина вращается вместе с диском. Пружина подключена к общей земле. Две тонкие металлические пластины установлены в конечных точках вращения. Каждая пластина одному из двух контактов на Arduino, которые поддерживают работу прерываний. Количество и номера контактов с прерываниями зависят от модели Arduino, которая используется. На Arduino Uno это два пина: пины 2 и 3). Пины на Arduino подключены к контакту + 5 Вольт через подтягивающие резисторы. В результате, фольга и пружина выполняют роль кнопки-переключателя. Когда контакт не замкнут — пружина не прижата к фольге — на контакте Arduino 5 В. Когда появляется контакт, соответствующий пин зазенляется и напряжение на нем падает до 0 В. С использованием attachInterrupt, можно указать функцию, которая будет выполняться, каждый раз при изменении питания на контакте от 5 В до 0 В. В пределах данной конкретной функции прерывания, указана определенная длительность управляющего импульса и сбрасывается счетчик вращения.
К диску прикреплена пружина от шариковой ручки. Пружина вращается вместе с диском. Пружина подключена к общей земле. Две тонкие металлические пластины установлены в конечных точках вращения. Каждая пластина одному из двух контактов на Arduino, которые поддерживают работу прерываний. Количество и номера контактов с прерываниями зависят от модели Arduino, которая используется. На Arduino Uno это два пина: пины 2 и 3). Пины на Arduino подключены к контакту + 5 Вольт через подтягивающие резисторы. В результате, фольга и пружина выполняют роль кнопки-переключателя. Когда контакт не замкнут — пружина не прижата к фольге — на контакте Arduino 5 В. Когда появляется контакт, соответствующий пин зазенляется и напряжение на нем падает до 0 В. С использованием attachInterrupt, можно указать функцию, которая будет выполняться, каждый раз при изменении питания на контакте от 5 В до 0 В. В пределах данной конкретной функции прерывания, указана определенная длительность управляющего импульса и сбрасывается счетчик вращения. Счетчик отслеживает микросекунды с момента последней смены направления вращения. То есть, зная скорость вращения, мы можем рассчитать текущее положение.
Счетчик отслеживает микросекунды с момента последней смены направления вращения. То есть, зная скорость вращения, мы можем рассчитать текущее положение.
Для того, чтобы обеспечить стабильное вращение в обоих направлениях, реализован алгоритм калибровки скорости, который отрабатывает каждый раз, когда Arduino перезагружается. Скорость вращения ротора по часовой стрелке указана на уровне программы, скорость вращения в противоположном направлении подстраивается (под скоростью подразумевается длина инмульсов, которые обеспечивают вращение по и против часовой стрелки). Основная задача калибровки — определить длину импульса, которая гарантирует одинаковую скорость вращения в обоих направлениях. При калибровке, Arduino подает команду вращаться вперед и в противоположном направлении на протяжении 20 секунд. На протяжении этого времени, засекается продолжительность вращения и рассчитывается средний период. После 20 секунд калибровки, вращение по и против часовой стрелки сравниваются и подбирается необходимая скорость вращения против часовой стрелки. После этого проводится вторая итерация калибровки — еще 20 секунд отработки указанного алгоритма. Новые итерации будут повторяться, пока разница между периодами не составит меньше 1/10 секунды. Обычно для этого необходимо 3-4 итерации.
После этого проводится вторая итерация калибровки — еще 20 секунд отработки указанного алгоритма. Новые итерации будут повторяться, пока разница между периодами не составит меньше 1/10 секунды. Обычно для этого необходимо 3-4 итерации.
Обмен данными с компьютером
Есть очень простой метод обмена данными между Arduono и персональным компьютером через USB кабель. Подключение реализуется по серийному порт, который дает возможность передавать и принимать данные. В нашем случае Arduino передает данные на персональный компьютер, на котором запущена программа для визуализации показаний радиолокации.
Основная часть программы для визуализации данных с сонара написана на языке программирования Scala. На Java написана небольшая часть кода, которая отвечает за обмен данными с Arduino. За основу был взят вот этот пример this code example с официального сайта Arduino. В программе добавлен кольцевой буфер (ссылка на API) для хранения данных, которые получены с Arduino без риска переполнения буфера. В скетче Arduino используется функция serialEvent для обработки поступающих данных. Этот метод гораздо удобнее, чем использовать серийный порт для небольшого пакета данных на каждой итерации цикла loop.
В скетче Arduino используется функция serialEvent для обработки поступающих данных. Этот метод гораздо удобнее, чем использовать серийный порт для небольшого пакета данных на каждой итерации цикла loop.
Программа запускает и останавливает работу эхолокатора, посылая строки “CONT” и “STOP” на плату Arduino. Как только Arduino получает строку “CONT”, отсылается управляющий сигнал на серву для начала вращения. Когда серводвигатель работает, Arduino подает команды на ультразвуковой датчик расстояния, который излучает ультразвуковые волны и рассчитывает время до приема отраженной волны. Для снятия показаний с ультразвукового датчика расстояния, использовалась отличная библиотека NewPing library. Процесс измерений можно увидеть на осциллограмме на видео в начале статьи. Для этого обратите внимание на уровни напряжений high и low на выходе сенсора. Каждый раз, когда Arduino получает значение расстояния, контроллер проверяет время, которое прошло с момента последнего изменения направления вращения ротора Arduino двигателя и конвертирует это время в угол поворота. Этот угол характеризует угол поворота эхолокатора в полярной системе координат. После этого угол и расстояние отсылаются на персональный компьютер по серийному порту. Программа на ПК считывает полученную пару данных и помещает их в массив, где также фиксируется текущее время. Благодаря этому можно мы можем в определить и время, когда было произведено измерение. На основании времени, в программе реализован эффект затухания, который характерен для старых аналоговых мониторов на радарах.
Этот угол характеризует угол поворота эхолокатора в полярной системе координат. После этого угол и расстояние отсылаются на персональный компьютер по серийному порту. Программа на ПК считывает полученную пару данных и помещает их в массив, где также фиксируется текущее время. Благодаря этому можно мы можем в определить и время, когда было произведено измерение. На основании времени, в программе реализован эффект затухания, который характерен для старых аналоговых мониторов на радарах.
Скриншот разработанной программы для эхолокации приведен ниже. Красной линией указывается текущее направление. Старые данные постепенно затухают.
Отображение данных с эхолокатора и функция распределения точки
Ультразвуковые датчики накладывают определенные ограничения из-за самого принципа своей работы. Вместо того, чтобы обнаруживать все отраженные сигналы, измеряется время до возврата звуковой волны при ее отражении от первого препятствия. То есть, мы не узнаем расстояние до объекта, который расположен на большем расстоянии от датчика, чем первый в пределах его угла обзора. Например, во втором случае на рисунке, который приведен ниже, мы получим расстояние до красного треугольника, а звездочка и квадрат ускользнут от нашего самодельного радара.
Например, во втором случае на рисунке, который приведен ниже, мы получим расстояние до красного треугольника, а звездочка и квадрат ускользнут от нашего самодельного радара.
Черная точка — это наш ультразвуковой датчик расстояния, зеленая площадь — эго угол обзора при различных углах поворота привода. Синяя звездочка — это объект, который мы никогда не сможем увидеть, так как он во всех случаях находится дальше чем красный треугольник или розовый квадрат.
Подобную проблему можно решить с помощью видеокамеры. При использовании видеокамеры с Arduino вы можете воспользоваться функцией распределения точки (ФРТ) (point spread function). Камеры не идеальны. Всегда есть определенный уровень шума, который зависит от расстояния до объекта. ФРТ — это способ описать эти шумы. Представьте, что вы делаете фотография маленькой черной точки на белом фоне. На рисунке ниже слева показана маленькая черная точка на белом фоне. Справа — фото той же точки, которое сделано камерой с большим уровнем шумов.
Обратите внимание, что очертания точки слева очень четкие. Если же фотография делается плохой камерой, точка будет выглядеть как показано справа. Во-первых, ее размеры кажутся больше, а границы размыты. Можно провести аналогию, что ФРТ — это изображение очень маленькой (меньше чем один пиксель) точки. Используя самую крутую камеру, вы никогда получите изображение, идентичное оригиналу. То есть, шумы будут всегда. Если мы знаем spread function нашей камеры, можно корректировать изображение с помощью метода обратной свертки. Это позволяет получить более четкое изображения после его обработки. Кстати, именно эта методика использовалась первые три года на Hubble Space Telescope’s. Измеряя ФРТ телескопа, астрономы могли корректировать изображения на Земле (через три года были внесены некоторые коррективы в работу телескопа и необходимость в подобной обработке отпала).
К сожалению, подобная методика совершенно неприменима в случае использования ультразвукового датчика расстояния, так как есть концепт под названием суперпозиция. Представьте себе, что вы сделали фотографию двух точек вместо одной.
Представьте себе, что вы сделали фотографию двух точек вместо одной.
На фотографии будут две точки. Обе будут немного размыты, но друг от друга они совершенно не зависят. То есть, фотография по сути является фотографией одной точки плюс фотографией второй точки. Другими словами, совмещенное изображение фотографий двух точек называется линейной суперпозицией двух отдельных фотографий.
Если мы теперь взглянем на ультразвуковой датчик расстояния, то поймем, что процесс формирования изображения не может быть описан принципом суперпозиции. Пример выше показал, что «фотографии» голубой звездочки, розового треугольника и розового квадрата не подлежат принципам суперпозиции фотографии трех отдельных объектов. Вместо этого датчик расстояния обнаруживает ближайший объект и игнорирует все остальные. Такую систему невозможно описать с помощью ФРТ и восстановить объекты, которых не хватает, с помощью пост-обработки не получится. То есть, использовать наш ультразвуковой датчик, Arduino и предложенный софт в качестве полноценного 3D сканера в медицине, мы не сможем.
А каким же образом реализуются такие сканеры, ведь они работают по тому же принципу и могут обеспечить формирования полную 2D и 3D модель человеческого тела с точным указанием расположения внутренних органов? Разница в принципе работы сенсора. Медицинский ультразвуковой датчик расстояния посылает короткие ультразвуковые импульсы и ждет их возврата. Но, в отличие от нашего датчика, он не контролирует промежуток времени, через который вернулся первый отраженный сигнал, а фиксирует все отраженные сигналы через на протяжении некоторого периода времени. Каждый принятый импульс является отраженной от определенного органа ультразвуковой волной. Таким образом сканер может построить 3D поверхность всего человеяеского тела. Вторая особенность промышленных 3D сканеров: ультразвуковая волна имеет максимально узкую направленность. То есть, вместо 30° покрытия, эти сенсоры генерируют сфокусированную волну.
Так что улучшать предложенный сонар на Arduino есть куда. Во-первых, не стоит использовать серву с управлением по скорости. Конструкция будет гораздо проще, а следовательно — точнее, если использовать серводвигатель с управлением по углу поворота выходного вала. Во вторых, есть смысл задумать о чем-то вроде фокусирующей линзы на ультразвуковой датчик расстояния. Если волна будет более узкой, вы сможете отследить объекты, сигнал от которых был подавлен другими, находящимися в широком поле зрения нашего сенсора. Кроме того, даташит на наш датчик говорит, что минимальное расстояние до объекта, которое контролируется, составляет 2 сантиметра. Над этим тоже можно подумать.
Конструкция будет гораздо проще, а следовательно — точнее, если использовать серводвигатель с управлением по углу поворота выходного вала. Во вторых, есть смысл задумать о чем-то вроде фокусирующей линзы на ультразвуковой датчик расстояния. Если волна будет более узкой, вы сможете отследить объекты, сигнал от которых был подавлен другими, находящимися в широком поле зрения нашего сенсора. Кроме того, даташит на наш датчик говорит, что минимальное расстояние до объекта, которое контролируется, составляет 2 сантиметра. Над этим тоже можно подумать.
Ну и конечно же, можно просто использовать другую модель ультразвукового датчика расстояния. Но это уже совсем другой проект и другая история…
Надеемся, эта статья дала вам некоторую теоретическую и практическую базу для разработки собственного ультразвукового сканера на Arduino, а представленные результаты и рекомендации позволят избежать некоторых проблем и в вашем проекте будут учтены все раскрытые недостатки базовой конструкции.
Оставляйте Ваши комментарии, вопросы и делитесь личным опытом ниже. В дискуссии часто рождаются новые идеи и проекты!
Ультразвуковые датчики — Микроэлектроника
Что бы робот мог объезжать препятствия, ему нужно их видеть. Для того что бы робот стал зрячим обычно используют ультразвуковой датчик измерения расстояния. Дальность действия датчика — 180 см.
Эйдзи Накано — Введение в робототехнику. Глава V. Сенсорные устройства роботов. Ультразвуковые датчики
Пьезоэлектрический эффект
Принцип действия
Ультразвуковой дальномер определяет расстояние до объектов точно так же, как это делают дельфины или летучие мыши. Он генерирует звуковые импульсы на частоте 40 кГц и слушает эхо. По времени распространения звуковой волны туда и обратно можно однозначно определить расстояние до объекта.
По времени распространения звуковой волны туда и обратно можно однозначно определить расстояние до объекта.
В отличие от инфракрасных дальномеров, на показания ультразвукового дальномера не влияют засветки от солнца или цвет объекта. Но могут возникнуть трудности с определением расстояния до пушистых или очень тонких предметов. Поэтому высокотехнологичную мышеловку выполнить на нём будет затруднительно.
При отражении звука от препятствия мы слышим эхо. Летучая мышь использует отражение ультразвуковых волн для полётов в темноте и для охоты на насекомых. По такому же принципу работает эхолот, с помощью которого измеряется глубина воды под днищем корабля или поиск рыбы.
Принцип передачи и приема ультразвуковой энергии лежит в основе многих очень популярных ультразвуковых датчиков и детекторов скорости. Ультразвуковые волны являются механическими акустическими волнами, частота которых лежит за пределами слышимости человеческого уха — более 20 кГц. Однако сигналы этих частот воспринимаются некоторыми животными: собаками, кошками, грызунами и насекомыми. А некоторые виды млекопитающих, таких как летучие мыши и дельфины, общаются друг с другом ультразвуковыми сигналами.
Однако сигналы этих частот воспринимаются некоторыми животными: собаками, кошками, грызунами и насекомыми. А некоторые виды млекопитающих, таких как летучие мыши и дельфины, общаются друг с другом ультразвуковыми сигналами.
УЛЬТРАЗВУКОВОЙ ДАТЧИК Lego Mindstorm EV 3. ЗРИ В КОРЕНЬ
Технические спецификации и особенности продукта:
-
- Измерение расстояния в диапазоне от 1 до 250 см
- Точность измерения до +/- 1 см
- Передняя подсветка в виде красного кольца горит постоянно при передаче сигнала и мигает при прослушивании эфира
- Если ультразвуковой сигнал распознан, датчик возвращает логическое значение «Истина»
- Автоматическая идентификация производится программным обеспечением микрокомпьютера EV3
Рис. 1 Ультразвуковой датчик Lego Mindstorm EV 3 (стоимость вместе с внутренним микроконтроллером и микросхемами усиления сигнала $50, при себестоимости $5)
Рис. 2 Схема ультразвукового датчика Lego Mindstorm EV 3 (ultrasonic sensor hardware schematics) построена на микроконтроллере STM8S103F3
- Введение в микроконтроллеры stm8
- Микроконтроллер STM8S103F3
- Схема центрального микроконтроллера LEGO MINDSTORMS EV3 programmable brick main hardware schematics
Рис. 3 Ультразвуковые излучатель AW8T40 и приемник AW8R40 ультразвукового датчика Lego Mindstorm EV 3
3 Ультразвуковые излучатель AW8T40 и приемник AW8R40 ультразвукового датчика Lego Mindstorm EV 3
Ультразвуковой датчик HC-SR04
Ультразвуковой датчик HC-SR04 — Ultrasonic Ranging Module HC — SR04 — Ultrasonic Sensor Distance Measuring Module — Sonar
Ультразвуковой дальномер HC SR04 самый известный датчик для применения в Arduino, Raspberry Pi, ESP8266 и ESP32 модулях. Позволяет измерять расстояние до объекта в диапазоне от 2 до 400 (180) см. Например, если вы хотите собрать робота, который объезжает преграды, то данный дальномер прекрасно подойдет для ваших задач. Датчик имеет небольшие габариты и простой интерфейс.
Рис. 4 Внешний вид ультразвукового датчика (сонара, ультразвукового сенсора, ультразвукового модуля) HC-SR04
Названия выводов и ультразвуковых излучателей модуля
- Vcc — положительный контакт питания.
- Trig — цифровой вход. Для запуска измерения необходимо подать на этот вход импульс (логическую единицу) длительностью 10 мкс.
 Следующий импульс рекомендуется подавать не ранее чем через 50 мс. что связано со временем обработки первого импульса.
Следующий импульс рекомендуется подавать не ранее чем через 50 мс. что связано со временем обработки первого импульса. - Echo — цифровой выход. После обработки отраженного сигнала, на этот выход будет подан импульс (логическая единица), длительностью пропорциональной расстоянию до объекта.
- GND — отрицательный контакт питания (земля).
- Левый ультразвуковой излучатель (маркирован буквой Т — transmiter) это передатчик ультразвукового сигнала, правый ультразвуковой излучатель (маркирован буквой R — resiver) это приемник отраженного от объекта ультразвукового сигнала (эха).
Характеристики
- Напряжение питания: 5 В. Модель HC-SR04 + работает в диапазоне от 3,3В-5В (помечено как HC-SR04 + на задней стороне платы модуля)
- Потребление в режиме тишины: 2 мА
- Потребление при работе: 15 мА
- Максимальная частота опроса датчика: 20 Гц (Период опроса 50 мс)
- Частота ультразвука: 40 кГц
- Дальность обзора: 2 см – 4 м (1,8 м)
- Разрешение (градация выходного сигнала): 0,3 см
- Эффективный угол наблюдения: 15°
- Рабочий угол наблюдения: 30°
- вес — 8,28 грамм
- Размеры: 45*20*15 мм.

Рис. 5 Размеры ультразвукового датчика HC-SR04
- Внимание:
! Модуль не рекомендуется подключать непосредственно к подключенной к электропитанию плате микроконтроллера, необходимо отключить электропитание в момент подключения модуля , первым должен быть подключен вывод GND модуля, в противном случае,это может повлиять на нормальную работу модуля. - ! При испытании модуля на дальность и точность измерения, размер площади объекта сканирования должен не менее 0,5 квадратных метров и его поверхность должна быть как можно тверже и ровнее, в противном случае, это будет влиять на результаты измерений.
Рис. 6 Диаграмма направленности ультразвукового датчика HC-SR04. Взята из документации на этот датчик
Описание работы:
Тест угла обзора датчика, взят из описания с сайта:
- https://life-prog.ru/view_msinv.php?id=62%D0%BC%D0%BE%D0%B6%D0%B5%D1%82
Ультразвуковой датчик расстояния определяет расстояние до объекта, измеряя время отображения звуковой волны от объекта. Частота звуковой волны находится в пределах частоты ультразвука, что обеспечивает концентрированное направление звуковой волны, так как звук с высокой частотой рассеивается в окружающей среде меньше. Типичный ультразвуковой датчик расстояния состоит из двух мембран, одна из которых генерирует звук, а другая регистрирует отображенное эхо. Образно говоря, мы имеем дело со звуковой колонкой и микрофоном. Звуковой генератор создает маленький, с некоторым периодом ультразвуковой импульс и запускает таймер. Рисунок 3 – Ультразвуковой датчик расстояния HC-SR04 Вторая мембрана регистрирует прибытие отображенного импульса и останавливает таймер. От времени таймера по скорости звука возможно вычислить пройденное расстояние звуковой волны. Расстояние объекта приблизительно половина пройденного пути звуковой волны. Рисунок 4 –Принцип работы ультразвукового датчик расстояния Ограничения, связанные с применением ультразвукового датчик расстояния : 1. Частичные отражения, или как их называют паразитный эхо-сигнал, могут исказить результаты измерений (причиной могут стать криволинейные или наклонные по отношению к направлению излучения сигнала поверхности).
Частота звуковой волны находится в пределах частоты ультразвука, что обеспечивает концентрированное направление звуковой волны, так как звук с высокой частотой рассеивается в окружающей среде меньше. Типичный ультразвуковой датчик расстояния состоит из двух мембран, одна из которых генерирует звук, а другая регистрирует отображенное эхо. Образно говоря, мы имеем дело со звуковой колонкой и микрофоном. Звуковой генератор создает маленький, с некоторым периодом ультразвуковой импульс и запускает таймер. Рисунок 3 – Ультразвуковой датчик расстояния HC-SR04 Вторая мембрана регистрирует прибытие отображенного импульса и останавливает таймер. От времени таймера по скорости звука возможно вычислить пройденное расстояние звуковой волны. Расстояние объекта приблизительно половина пройденного пути звуковой волны. Рисунок 4 –Принцип работы ультразвукового датчик расстояния Ограничения, связанные с применением ультразвукового датчик расстояния : 1. Частичные отражения, или как их называют паразитный эхо-сигнал, могут исказить результаты измерений (причиной могут стать криволинейные или наклонные по отношению к направлению излучения сигнала поверхности). 2. Измерения объектов из звукопоглощающих, изоляционных материалов или имеющих тканевую (шерстяную) поверхность могут привести к неправильным измерениям вследствие поглощения (ослабления) сигнала. 3. Чем меньше объект, тем меньшую отражающую поверхность он имеет. Это приводит к более слабому отраженному сигналу. 4. При высокой влажности (дождь, снег) сигнал также может частично отражаться от капель (снежинок), что приводит к паразитному эхо- сигналу.
2. Измерения объектов из звукопоглощающих, изоляционных материалов или имеющих тканевую (шерстяную) поверхность могут привести к неправильным измерениям вследствие поглощения (ослабления) сигнала. 3. Чем меньше объект, тем меньшую отражающую поверхность он имеет. Это приводит к более слабому отраженному сигналу. 4. При высокой влажности (дождь, снег) сигнал также может частично отражаться от капель (снежинок), что приводит к паразитному эхо- сигналу.
Принцип работы датчика следующий: один из пьезоэлементов излучает ультразвуковую волну при подачи импульса длительностью 15 микросекунд, а другой пьезоэлемент принимает эту же отражённую волну от препятствия. Затем замеряется время задержки от передачи до приёма волны, далее вычисляется расстояние и передаётся сигнал на ногу Echo датчика, длительностью пропорциональной расстоянию до препятствия. Нам остаётся только подавать импульс на датчик, принять его и вычислить расстояние. Сегодня мы научимся работать с HC-SR04 на BASCOM-AVR.
Поставим перед собой задачу: собрать устройство, которое должно замерять расстояние до какого либо объекта с помощью датчика HC-SR04 и передавать данные через UART на ПК.
Для этой цели можно использовать практически любой AVR микроконтроллер, так как алгоритм очень простой. Я взял Atmega8, в итоге получилась следующая принципиальная схема устройства:
Описание принципа работы ультразвукового дальномера HC—SR04 можно разделить на следующие шаги:
Следующий импульс может быть излучён, только после исчезновения эха от предыдущего. Это время называется периодом цикла (cycle period). Рекомендованный период между импульсами должен быть не менее 50 мс.
Если на сигнальный пин (Trig) подаётся импульс длительностью 10 мкс, то ультразвуковой модуль будет излучать восемь пачек ультразвукового сигнала с частотой 40кГц и обнаруживать их эхо. Измеренное расстояние до объекта пропорционально ширине эха (Echo) и может быть рассчитано по формуле, приведённой на графике выше.
Датчик отправляет ультразвуковые импульсы и слушает эхо. На вход Trig датчика подаем импульс высокого уровня длительностью 10–15 микросекунд. Датчик отправляет ультразвуковой сигнал «chirp» из восьми коротких импульсов частотой выше предела диапазон слуха человека. Электроника датчика знает скорость звука в воздухе. Измеряя время между отправленным и принятым ультразвуком, ультразвуковой датчик HC-SR04 формирует выходной сигнал. Этот принцип эхолокации используют дельфины и летучие мыши. Спустя примерно микросекунду ультразвуковой датчик HC-SR04 выдает на выходе Echo импульс высокого уровня длительностью до 38 миллисекунд. Если препятствий не обнаружено, то на выходе будет сигнал с длительностью 38 мс. Таким образом, для работы с датчиком от электроники прибора требуется один цифровой управляющий выход и один вход для сигнала датчика. Длина импульса на выходе Echo пропорциональна расстоянию до препятствия. Расстояние вычисляется по формуле: S=F/58, где S – расстояние в сантиметрах, F – продолжительность импульса в микросекундах. Для взаимодействия Arduino с датчиком есть программная библиотека Ultrasonic.
На вход Trig датчика подаем импульс высокого уровня длительностью 10–15 микросекунд. Датчик отправляет ультразвуковой сигнал «chirp» из восьми коротких импульсов частотой выше предела диапазон слуха человека. Электроника датчика знает скорость звука в воздухе. Измеряя время между отправленным и принятым ультразвуком, ультразвуковой датчик HC-SR04 формирует выходной сигнал. Этот принцип эхолокации используют дельфины и летучие мыши. Спустя примерно микросекунду ультразвуковой датчик HC-SR04 выдает на выходе Echo импульс высокого уровня длительностью до 38 миллисекунд. Если препятствий не обнаружено, то на выходе будет сигнал с длительностью 38 мс. Таким образом, для работы с датчиком от электроники прибора требуется один цифровой управляющий выход и один вход для сигнала датчика. Длина импульса на выходе Echo пропорциональна расстоянию до препятствия. Расстояние вычисляется по формуле: S=F/58, где S – расстояние в сантиметрах, F – продолжительность импульса в микросекундах. Для взаимодействия Arduino с датчиком есть программная библиотека Ultrasonic.
Шаг 1: На вход Trig подаётся импульс длительностью 10 микроСекунд. Для дальномера это команда начать измерение расстояния перед ним.
Шаг 2: Устройство генерирует 8 ультразвуковых импульсов с частотой 40 кГц через выходной сенсор T.
Шаг 3: Звуковая волна отражается от препятствия и попадает на принимающий сенсор R.
Шаг 4: На выходе Echo формируется импульс, длительность которого прямо пропорциональна измеренному расстоянию.
Шаг 5: На стороне управляющего контроллера переводим длительность импульса Echo в расстояние по формуле: ширина импульса(мкс) / 58 = дистанция (см).
Ниже на рисунке приведены временные диаграммы, наглядно поясняющие перечисленные шаги.
На сигнал Trig нужно подавать короткие импульсы длительностью 10мкс. Этот импульс запускает эхо-локатор. Он уже сам генерирует пачку ультразвуковых импульсов (40кГц) для излучателя и сам ловит отраженное эхо. По времени распространения звука туда и назад датчик определяет расстояние. Нам же сам датчик на контакт Echo выдает импульс с длительностью пропорциональной расстоянию. Длительность сигнала Echo от 150мкс до 25мс. Если ответа нет, то длительность Echo около 40мс. Расстояние до объекта можно вычислить разделив длительность в микросекундах эха на 58. Получаются расстояние в сантиметрах. Максимальное расстояние, которое можно мерить судя по документации — 5 метров.
Рекомендуемый период опроса датчика 50-10мс. Диаграмма направленности датчика не очень острая — примерно градусов под тридцать.
- Действие ультразвукового дальномера HC-SR04 основано на принципе эхолокации. Он излучает звуковые импульсы в пространство и принимает отражённый от препятствия сигнал.
 По времени распространения звуковой волны к препятствию и обратно определяется расстояние до объекта.
По времени распространения звуковой волны к препятствию и обратно определяется расстояние до объекта.
Запуск звуковой волны начинается с подачи положительного импульса длительностью не менее 10 микросекунд на ножку TRIG дальномера. Как только импульс заканчивается, дальномер излучает в пространство перед собой пачку звуковых импульсов частотой 40 кГц. В это же время запускается алгоритм определения времени задержки отражённого сигнала, а на ножке ECHO дальномера появляется логическая единица. Как только датчик улавливает отражённый сигнал, на выводе ECHO появляется логический ноль. По длительности этого сигнала («Задержка эхо» на рисунке) определяется расстояние до объекта.
Диапазон измерения расстояния дальномера HC-SR04 — до 4 метров с разрешением 0,3 см. Угол наблюдения — 30 градусов, эффективный угол — 15 градусов. Ток потребления в режиме ожидания 2 мА, при работе — 15 мА. - Запуск звуковой волны начинается с подачи положительного импульса длительностью не менее 10 микросекунд на ножку TRIG дальномера.
 Как только импульс заканчивается, дальномер излучает в пространство перед собой пачку звуковых импульсов частотой 40 кГц. В это же время запускается алгоритм определения времени задержки отражённого сигнала, а на ножке ECHO дальномера появляется логическая единица. Как только датчик улавливает отражённый сигнал, на выводе ECHO появляется логический ноль. По длительности этого сигнала («Задержка эхо» на рисунке) определяется расстояние до объекта.
Как только импульс заканчивается, дальномер излучает в пространство перед собой пачку звуковых импульсов частотой 40 кГц. В это же время запускается алгоритм определения времени задержки отражённого сигнала, а на ножке ECHO дальномера появляется логическая единица. Как только датчик улавливает отражённый сигнал, на выводе ECHO появляется логический ноль. По длительности этого сигнала («Задержка эхо» на рисунке) определяется расстояние до объекта.
Диапазон измерения расстояния дальномера HC-SR04 — до 4 метров с разрешением 0,3 см. Угол наблюдения — 30 градусов, эффективный угол — 15 градусов. Ток потребления в режиме ожидания 2 мА, при работе — 15 мА.
Рис. 40. Пьезоэлектрический ультразвуковой преобразователь: А — входное напряжение приводит к изгибу элемента, что вызывает генерацию ультразвуковых волн. И наоборот, в результате воздействия волн на выходе преобразователя появляется напряжение; Б — ультразвуковой преобразователь с открытой апертурой для работы в воздухе
- Подробнее: https://www.
 kakprosto.ru/kak-918792-kak-podklyuchit-ultrazvukovoy-dalnomer-hc-sr04-k-arduino#ixzz4PeP45Mxx
kakprosto.ru/kak-918792-kak-podklyuchit-ultrazvukovoy-dalnomer-hc-sr04-k-arduino#ixzz4PeP45Mxx - Контакты, по порядку слева направо, с лицевой стороны:
- Vcc – питание 5В
- Trig – вход
- Echo – выход
- Gnd –земля
Процесс работы:
- Подключаем датчик к питанию и к управляющему устройству
- Посылаем на вход дальномера (Trig) сигнал длительностью 10мкс (или чуть больше, он срабатывает с 10мкс)
- Динамик датчика издает 8 сигналов частотой 40кГц, и микрофон получает их эхо (или не получает)
- Датчик подает на свой выход (Echo) сигнал длительностью соответствующей расстоянию до препятствия: 150мкс (при 2см до препятствия) – 25мс (при 4м до препятствия) и 38мс при отсутствии преграды. На заметку: звук проходит расстояние 4см (2см от динамика до препятствия и 2см обратно до микрофона) за 0.04м / 335м/с = 0,000119с=119мкс и 8м за 8м / 335м/с = 0,023881с = 23,881мс.
Какое время проходит от срабатывания датчика по входному сигналу до начала пункта 3 и от начала пункта 3 до начала пункта 4 нигде не сказано – это скоро будет выяснено мной опытным путём.

Для расчета расстояния до препятствия используются следующие формулы:
- Длина выходного импульса в микросекундах / 58 = расстояние в сантиметрах
- Длина выходного импульса в микросекундах / 148 = расстояние в дюймах
Схема модуля HC-SR04 имеет 2 преобразователя ультрозвуковых сигналов в электрические сигналы малой мощности, один TCT40-16T — (T — Transmiter на схеме обозначен как Emit MK2 смотри схему) предназначен для передачи (эмиссии) ультразвуковых волн в окружаюшее пространство а второй TCT40-16R (R — Receive на схеме обозначен как Receive MK1 смотри схему) для приема отраженных ультрозвуковых волн от предметов окружающего мира.
Для передачи ультразвуковых волн требуется относительно высокое напряжение. Микросхема MAX232 (обозначение на плате — U3 смотри схему) усиливает 5 вольт входного питающего напряжения до +/- 9-10 вольт. Микросхема MAX232 подключается между двумя выходами ( T OUT1 — вывод 14 и T OUT2 вывод 7 смотри схему) , так что на самом деле амплитуда значения напряжения импульсов подающихся на ультрозвуковой передатчик достигает до 20 вольт. Питание подается на микросхему MAX232 через транзистор Q2 (в новой схеме отсутствует и питание подается напрямую на вход 16 микросхемы и в этом случае отключения микроконтроллером не происходит) некоторое время до и во время излучения импульса , так как внутреннее переключение заряда создает избыточный шум на приемной стороне модуля. Когда модуль переходит в режим приема на микросхеме MAX232 отключается питание выходом 10 — Signal микроконтроллера EM78P153S (EM78P153S китайский микроконтроллер работает на частоте < 27 МГц .
Микросхема MAX232 подключается между двумя выходами ( T OUT1 — вывод 14 и T OUT2 вывод 7 смотри схему) , так что на самом деле амплитуда значения напряжения импульсов подающихся на ультрозвуковой передатчик достигает до 20 вольт. Питание подается на микросхему MAX232 через транзистор Q2 (в новой схеме отсутствует и питание подается напрямую на вход 16 микросхемы и в этом случае отключения микроконтроллером не происходит) некоторое время до и во время излучения импульса , так как внутреннее переключение заряда создает избыточный шум на приемной стороне модуля. Когда модуль переходит в режим приема на микросхеме MAX232 отключается питание выходом 10 — Signal микроконтроллера EM78P153S (EM78P153S китайский микроконтроллер работает на частоте < 27 МГц .
Прием и выделение электрических импульсов поступающих с преобразователя ультразвуковых сигналов TCT40-16R осуществляется микросхемой LM324 (обозначение на плате — U1 смотри схему) , который содержит 4 операционных усилителя. Операционный усилитель U2D (смотри схему) усиливает сигнал в 6 раз. Операционный усилитель U2C имея обратную связь (1 — го порядка) является полосовым фильтром , затем операционный усилитель U2B усиливает входной сигнал еще 8 раз. Последний операционный усилитель U2A используется вместе с Q1 в качестве гистерезиса компаратора где происходит выделение прямоугольных импульсов и аналогового входного сигнала. Я моделировал фильтр в PSpice и не центрирована 40KHz , как это должно быть , но вместо этого он имеет пик 18kHz. Изменяя только два резистора (R13 до 2K2 и R11 до 18К) отклик фильтра смещается на частоту пульса , и это значительно повышает чувствительность обнаружения.
Операционный усилитель U2D (смотри схему) усиливает сигнал в 6 раз. Операционный усилитель U2C имея обратную связь (1 — го порядка) является полосовым фильтром , затем операционный усилитель U2B усиливает входной сигнал еще 8 раз. Последний операционный усилитель U2A используется вместе с Q1 в качестве гистерезиса компаратора где происходит выделение прямоугольных импульсов и аналогового входного сигнала. Я моделировал фильтр в PSpice и не центрирована 40KHz , как это должно быть , но вместо этого он имеет пик 18kHz. Изменяя только два резистора (R13 до 2K2 и R11 до 18К) отклик фильтра смещается на частоту пульса , и это значительно повышает чувствительность обнаружения.
МИКРОКОНТРОЛЛЕР ESP-8266 И УЛЬТРАЗВУКОВОЙ ДАТЧИК HC-SR04
Переделка ультразвукового датчика HC-SR04
Рис. 4 Ультразвуковой излучатель/приемник TCT40-16R/T (стоимость вместе с внутренним микроконтроллером и микросхемами усиления сигнала < $1 )
Рис. 5 Пространственная диаграмма излучения ультразвукового излучателя/приемника TCT40-16R/T (если бы мы видели ультразвук, то так бы мы видели распространение ультразвуковых волн в пространстве)
Характеристики ультразвукового излучателя/приемника TCT40-16R/T
1. Model: TCT40-16R/T (16 мм в диаметре)
Model: TCT40-16R/T (16 мм в диаметре)
2. Номинальная частота (Кгц): 40 КГц
3. Излучение At10v звукового давления (дб = 0.02mPa): ≥ 117dB
4. чувствительность Приемника at40KHz (дб = V/ubar): ≥-65dB
5. Электростатический потенциал at1KHz, < 1 В (PF): 2000 ± 30%
Ультразвуковые преобразователи справка 1
Ультразвуковые преобразователи справка 2
ПРИМЕНЕНИЕ
Эхолот. Рубрика «Как это работает?»
Ультразвуковые датчики Murata
Датчики, предназначенные для автоматов парковки, имеют высокую чувствительность: при резонансной частоте, равной 40 кГц. Дальность действия датчика достигает 1,5 метров при разрешающей способности 9 мм. Выпускаются датчики с различной диаграммой направленности, как симметричной (круговой), так и не симметричной (овальной).
Выпускаются датчики с различной диаграммой направленности, как симметричной (круговой), так и не симметричной (овальной).
Подключение к Arduino
Если вы планируете использовать ультразвуковой дальномер HC-SR04 с Arduino вы можете воспользоваться существующими библиотеками:
- Ultrasonic — самая популярная библиотека для HC-SR04.
- NewPing — отличается большей точностью и скоростью работы.
- Ультразвуковой дальномер URM37
Распиновка:
- Vcc — положительный вывод питания
- TRIG — вход TRIG
- ECHO — выход ECHO
- GND — ноль питания
На выводы питания подается постоянное напряжение 5 В, потребляемый ток в рабочем режиме около 15 мА.
Вход TRIG подключается к любому выводу микроконтроллера. На этот вывод нужно подавать импульсный цифровой сигнал длительностью 10 мкс. По сигналу на входе TRIG датчик посылает ультразвуковые импульсы.
После приема отраженного сигнала, датчик формирует на выводе ECHO импульсный сигнал, длительность которого пропорционально расстоянию до преграды.
Контакты датчика можно соединить с макетной платой или Arduinoпроводами «мама-папа». А с Troyka Shield через провода «мама-мама».
- Гаражный парктроник
Этот дальномер может служить прекрасным датчиком для робота, благодаря которому он сможет определять расстояния до объектов, объезжать препятствия, или строить карту помещения. Его можно также использовать в качестве датчика для сигнализации, срабатывающего при приближении объектов.
Технические характеристики
https://www.yourmestudio.com/rcw-0002-ultrasonic-ranging-module-p717.html
- Напряжение питание: 5 В
- Потребление в режиме тишины: 2 мА
- Потребление при работе: 15 мА
- Диапазон расстояний: 2–400 см
- Эффективный угол наблюдения: 15°
- Рабочий угол наблюдения: 30°
Описание продукта:
ТК T 40-16 т/r 1
-
(Tc): piezoceramics Ультразвуковой датчик
-
(T): Категория t-общность
-
(40): Центральная частота (кгц)
-
(16): наружный диаметр? (мм)
-
(T): использование режим: излучатель; r-приемник; tr-совместимость излучатель и приемник
-
(1): ID — 1,2, 3…
Тестирования цепи
- 1 синусоидальный генератор 1 охватил сигнала Генератор
- 2 cymometer 2 Частотомер
- 3 стандартных динамик 3 вольтметр
- 4 Получить модель датчика 4 излучают модель датчика
- 5 осциллографа 5 Стандартный микрофон
- 6 аудио частотные характеристики Дисплей прибора
Производительность продукта
1). Номинальная частота (кГц): 40 кГц
Номинальная частота (кГц): 40 кГц
2). излучать звук pressureat10V (= 0.02Mpa):? 117dB
3). Прием Чувствительность приемника at40KHz (дБ = v/ubar):?-65dB
4). Электростатический потенциал at1KHz, <1 В (PF): 2000 +/-30%
5). Диапазон обнаружения (м): 0.2 ~ 20
6).-6дБ угол направления: 80o
7). Обшивка материал: алюминий
8). Обшивка ЦВЕТ: серебристый
Полезные ресурсы:
Ультразвуковой дальномер HC-SR04 подключение к Arduino
Ультразвуковой датчик HC-SR04 – дальномер на микроконтроллере
https://www.elecfreaks.com/store/download/product/Sensor/HC-SR04/HC-SR04_Ultrasonic_Module_User_Guide.pdf
https://robocraft.ru/blog/arduino/770.html
Ультразвуковой датчик измерения расстояния HC-SR04
Pengetahuan Dasar Таймер Untuk Pengukuran Jarak Dengan Ультразвуковой
Запуск сервопривода с помощью датчика расстояния HC-SR04 и Arduino
https://robocraft.ru/blog/electronics/772.html
Raspi-отстойника в октябре 2014 Embedded Выпуск LinuxJournal
https://www. arduino.cc/en/Tutorial/Ping
arduino.cc/en/Tutorial/Ping
Простой искатель ультразвуковой диапазон с помощью HC-SR04
Датчик Препятствие с помощью Arduino и HCSR04
Как проверить DYP-ME007 Ультразвуковой дальномер с использованием NE555 и мультиметра
https://macduino.blogspot.ru/2013/11/HC-SR04-part1.html
https://amperka.ru/product/ultrasonic-urm37
https://image.dfrobot.com/image/data/SEN0002/URM04V2.0Mannual1.1.pdf
https://people.ece.cornell.edu/land/courses/ece4760/FinalProjects/s2012/xz227_gm348/xz227_gm348/URM3.2_Mannual_Rev2.pdf
RCW-0012 Ультразвуковой Модуль Расстояние Измерительный Преобразователь Тест Модуля Индикации
https://www.farnell.com/datasheets/81163.pdf?_ga=1.169892256.1853603956.1478607467
https://chinaultrasound.en.alibaba.com/product/60268805778-800581237/40Khz_TCT40_16R_T_Air_Ultrasonic_Ceramic_Transducer_Ultrasonic_Sensor.html
Использование ультразвукового дальномера
Импульсные ультразвуковые сонары открытого типа
Ultrasonic Sonar Ranging IC — PW0268
Miniature Tuning Fork Quartz Crystals
Sonar Ranging Module SRM400
Ультразвуковой датчик расстояния (HC-SR04) — Pi Supply
Афганистан (GBP£)
Аландские острова (GBP£)
Албания (GBP£)
Алжир (GBP£)
Андорра (GBP£) 9 0003
Ангола (GBP£)
Ангилья (GBP£)
Антигуа и Барбуда (GBP£)
Аргентина (GBP£)
Армения (GBP£)
Аруба (GBP£)
Остров Вознесения (фунт стерлингов)
Австралия (GBP£)
Австрия (GBP£)
Азербайджан (GBP£)
Багамы (GBP£)
Бахрейн (GBP£)
Бангладеш (GBP£)
Барбадос (GBP£)
Беларусь (GBP£)
Бельгия (GBP£)
900 02 Белиз (GBP£)Бенин (GBP£)
Бермуды (GBP£)
Бутан (GBP£)
Боливия (GBP£)
Босния и Герцеговина (GBP£)
Ботсвана (GBP£) 9000 3
Бразилия (GBP£)
Британская территория в Индийском океане (GBP£)
Британские Виргинские острова (GBP£)
Бруней (GBP£)
Болгария (GBP£)
Буркина-Фасо (GBP£)
Бурунди (GBP£)
Камбоджа (GBP£)
Камерун (GBP£) 90 003
Канада (фунт стерлингов)
Кабо-Верде (GBP£)
Карибские Нидерланды (GBP£)
Каймановы острова (GBP£)
Центральноафриканская Республика (GBP£)
Чад (GBP£)
Чили (GBP£) 9 0003
Китай (GBP£)
Остров Рождества (GBP£)
Кокосовые (Килинг) острова (GBP£)
Колумбия (GBP£)
Коморские острова (GBP£)
Конго — Браззавиль (GBP£)
Конго — Киншаса (GBP£)
Острова Кука (GBP£)
Коста-Рика (GB
Кот-д’Ивуар (GBP£)
Хорватия (GBP£)
Кюрасао (GBP£)
Кипр (GBP£)
Чехия (GBP£)
Дания (GBP£)
D джибути (GBP£)
Доминика (GBP£)
Доминиканская Республика (GBP£)
Эквадор (GBP£)
Египет (GBP£)
Сальвадор (GBP£)
Экваториальная Гвинея (GBP£)
Эритрея (GBP£)
Эстония (GBP£)
Эсватини (GBP£)
900 02 Эфиопия (GBP£)Фолклендские острова (GBP£)
Фарерские острова (GBP£)
Фиджи (GBP£)
Финляндия (GBP£)
Франция (GBP£)
Французская Гвиана (GBP£) 90 003
Французская Полинезия ( GBP£)
Французские южные территории (GBP£)
Габон (GBP£)
Гамбия (GBP£)
Грузия (GBP£)
Германия (GBP£)
Гана (GBP£)
Гибралтар (GBP£)
Греция (GBP£)
Гренландия ( фунтов стерлингов)
Гренада (GBP£)
Гваделупа (GBP£)
Гватемала (GBP£)
Гернси (GBP£)
Гвинея (GBP£)
Гвинея-Бисау (GBP£)
9000 2 Гайана (GBP£)Гаити (GBP£)
Гондурас (GBP£)
САР Гонконг (GBP£)
Венгрия (GBP£)
Исландия (GBP£)
Индия (GBP£)
Индонезия (GBP£)
Ирак (GBP£)
Ирландия (GBP£)
Остров Мэн (GBP£)
Израиль (фунт стерлингов) )
Италия (GBP£)
Ямайка (GBP£)
Япония (GBP£)
Джерси (GBP£)
Иордания (GBP£)
Казахстан (GBP£)
900 02 Кения (GBP£)Кирибати (GBP£)
Косово (GBP£)
Кувейт (GBP£)
Кыргызстан (GBP£)
Лаос (GBP£)
Латвия (GBP£)
Ливан (GBP£)
Лесото (GBP£)
Либерия (GBP£)
Ливия (GBP£)
900 02 Лихтенштейн (GBP£)Литва (GBP£)
Люксембург (GBP£)
САР Макао (GBP£)
Мадагаскар (GBP£)
Малави (GBP£)
Малайзия (GBP£)
90 002 Мальдивы (GBP£)Мали (GBP£)
Мальта (GBP£)
Мартиника (GBP£)
Мавритания (GBP£)
Маврикий (GBP£)
Майотта (GBP£)
Мексика (GBP£)
Молдова (GBP£)
Монако (GBP£)
Монголия (GBP£)
9 0002 Черногория (GBP£)Монтсеррат (GBP£)
Марокко (GBP£)
Мозамбик (GBP£)
Мьянма (Бирма) (GBP£)
Намибия (GBP£)
Науру (GBP£) 900 03
Непал (GBP£ )
Нидерланды (GBP£)
Новая Каледония (GBP£)
Новая Зеландия (GBP£)
Никарагуа (GBP£)
Нигер (GBP£)
Нигерия (GBP£)
Ниуэ (GBP£)
Остров Норфолк (GBP£)
Северная Македония (GBP£)
Норвегия (GBP£ )
Оман (GBP£)
Пакистан (GBP£)
Палестинские территории (GBP£)
Панама (GBP£)
Папуа-Новая Гвинея (GBP£)
Парагвай (GBP£)
Перу ( GBP£)
Филиппины (GBP£)
Острова Питкэрн (GBP£)
Польша (GBP£)
Португалия (GBP£)
Катар (GBP£)
Реюньон (GBP£)
Румыния (GBP£)
Россия (GBP£)
Руанда (GBP£)
900 02 Самоа (GBP£)Сан-Марино (GBP£)
Сан-Томе и Принсипи (GBP£)
Саудовская Аравия (GBP£)
Сенегал (GBP£)
Сербия (GBP£)
Сейшельские Острова (GBP£)
Сьерра-Леоне (GBP£)
Сингапур (GBP£)
Синт-Мартен (GBP£)
Словакия (GBP£)
Словения (GBP £)
Соломонские острова (GBP £)
Сомали (GBP £)
Южная Африка (GBP £)
South Georgia & South Sandwich Islands (GBP £)
Южная Корея (GBP £).
Южный Судан (GBP£)
Испания (GBP£)
Шри-Ланка (GBP£)
Сент-Бартелеми (GBP£)
Остров Святой Елены (GBP£)
Сент-Китс и Невис ( фунт стерлингов £)
Сент-Люсия (GBP£)
Сен-Мартен (GBP£)
Сен-Пьер и Микелон (GBP£)
Сент-Винсент и Гренадины (GBP£)
Судан (GBP£)
Суринам (GBP£)
Шпицберген и Ян-Майен (GBP£)
Швеция (GBP£)
Швейцария (GBP) £)
Тайвань (GBP£)
Таджикистан (GBP£)
Танзания (GBP£)
Таиланд (GBP£)
Тимор-Лешти (GBP£)
Того (GBP£)
келау (GBP£)
Тонга (GBP£)
Тринидад и Тобаго (GBP£)
Тристан-да-Кунья (GBP£)
Тунис (GBP£)
Турция (GBP£)
Туркменистан (GBP£)
Острова Теркс и Кайкос (GBP£)
Тувалу (GBP£)
Внешние острова США ( GBP£)
Уганда (GBP£)
Украина (GBP£)
Объединенные Арабские Эмираты (GBP£)
Великобритания (GBP£)
США (GBP£)
Уругвай (GBP£)
Узбекистан (GBP£)
Вануату (GBP£)
Ватикан (GBP£)
Венесуэла (GBP£)
Вьетнам (GBP£)
Уоллис и Футуна (GBP£)
Западная Сахара (GBP£)
Йемен (GBP£)
Замбия (GBP£)
Зимбабве (GBP£) 9 0003
ХК-СР04 Модуль датчика дальномера детектора ультразвуковой волны ХКСР04 Дис
Наведите курсор на изображение, чтобы увеличить Нажмите на изображение, чтобы увеличить
Скидка 6%
Robotbanao.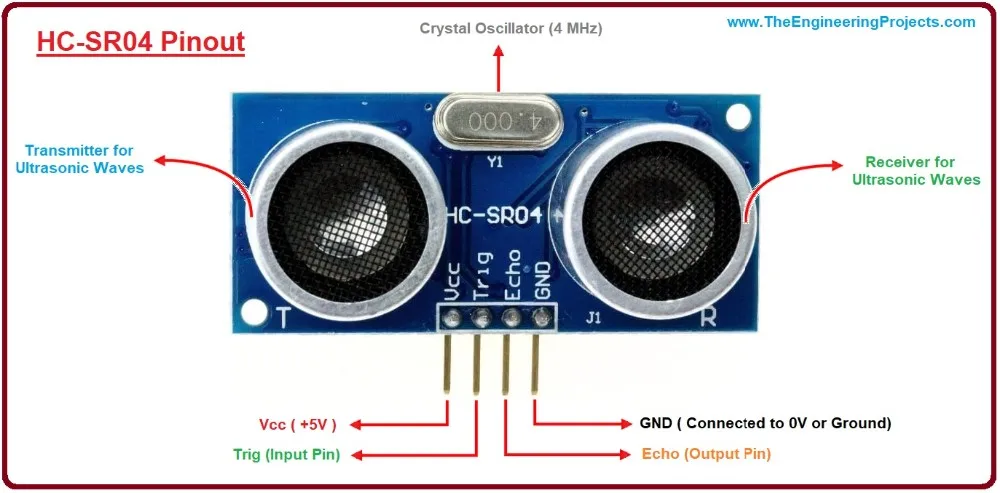 comАртикул: RB-1260
comАртикул: RB-1260
Доступные предложения :
Первая покупка: Получите скидку 5% на первый заказ, используя код ПЕРВЫЙ
Наградные баллы: Получите 2 монеты за каждую потраченную ₹1.
Поделиться этим продуктом
ОБЗОР ПРОДУКТА:
- Используется для определения расстояния до объекта с помощью гидролокатора.
- HC-SR04 использует бесконтактный ультразвуковой сонар для измерения расстояния до объекта и состоит из двух ультразвуковых передатчиков (в основном динамиков), приемника и схемы управления
Описание: Этот ультразвуковой дальномер HC-SR04 — очень популярный датчик, который можно найти во многих приложениях, где требуется измерение расстояния и обнаружение объектов.
Спецификация:
| Модель |
ХК-СР04 |
| Рабочее напряжение (В постоянного тока) |
5 |
| Среднее потребление тока (мА) |
2 |
| Частота (Гц) |
40000 |
| Угол обнаружения |
15° |
Макс. Расстояние срабатывания (см) Расстояние срабатывания (см) |
450 |
| Вес (г) |
9 |
| Крышка датчика Диам. (мм) |
16 |
| Размер печатной платы (Д x Ш), мм |
45 х 20 |
| Вес отгрузки |
0,014 кг |
| Размеры поставки |
5 × 4 × 3 см |
Модуль имеет два глаза, похожие на проекты спереди, которые образуют ультразвуковой передатчик и приемник. Ультразвуковой датчик HC-SR04 использует сонар для определения расстояния до объекта, как это делают летучие мыши или дельфины.
Этот модуль ультразвукового датчика представляет собой передатчик, приемник и схему управления в одном корпусе!! Имеет очень удобную и компактную конструкцию. Он предлагает превосходную точность измерения дальности и стабильные показания в простом в использовании корпусе. На его работу не влияет солнечный свет или черный материал, как на дальномеры Sharp (хотя акустически мягкие материалы, такие как ткань, могут быть трудно обнаружены).
На его работу не влияет солнечный свет или черный материал, как на дальномеры Sharp (хотя акустически мягкие материалы, такие как ткань, могут быть трудно обнаружены).
Выводы Trigger и Echo являются выводами ввода/вывода этого модуля, и, следовательно, они могут быть подключены к выводам ввода/вывода микроконтроллера/Arduino.
Когда приемник обнаруживает возвратную волну, вывод Echo становится высоким на определенное время, которое будет равно времени, необходимому для того, чтобы волна вернулась обратно к датчику.
Ультразвуковой модуль измерения дальности HC-SR04 обеспечивает возможность бесконтактного измерения расстояния от 2 до 400 см с точностью до 3 мм.
Применение ультразвукового датчика:
Ультразвуковой датчик используется для расчета расстояния между датчиком и объектом . Он в основном используется для расчета ускорения, скорости и положения датчика, прикрепленного к устройству.
