Что такое датчики перемещения. Какие бывают виды датчиков перемещения. Как работают основные типы датчиков перемещения. Где применяются датчики перемещения в промышленности и технике. Каковы преимущества и недостатки разных типов датчиков перемещения.
Что такое датчики перемещения и для чего они используются
Датчики перемещения (или измерители перемещения) — это устройства, предназначенные для измерения линейного или углового перемещения объектов относительно некоторого начального положения. Они позволяют с высокой точностью определять расстояние, на которое сместился объект, а также его текущее положение в пространстве.
Основные области применения датчиков перемещения:
- Измерение размеров и геометрических параметров деталей в машиностроении
- Контроль точности позиционирования в станках с ЧПУ
- Мониторинг деформаций конструкций в строительстве
- Определение уровня жидкостей и сыпучих материалов
- Системы автоматизации производственных процессов
- Научные исследования, требующие прецизионных измерений
Таким образом, датчики перемещения играют важную роль во многих отраслях промышленности и техники, где требуется точное измерение и контроль положения объектов.

Основные виды датчиков перемещения
По принципу действия датчики перемещения можно разделить на несколько основных типов:
1. Оптические датчики перемещения
Принцип работы основан на отражении света от объекта и анализе отраженного сигнала. Основные разновидности:
- Лазерные триангуляционные датчики
- Конфокальные датчики
- Интерферометрические датчики
Преимущества: высокая точность, бесконтактное измерение, большой диапазон.
2. Индуктивные (вихретоковые) датчики
Работают на основе изменения индуктивности катушки при приближении металлического объекта. Подходят для измерения малых перемещений металлических деталей.
3. Ультразвуковые датчики
Измеряют расстояние по времени прохождения ультразвуковой волны до объекта и обратно. Применяются для измерения больших расстояний.4. Потенциометрические датчики
Принцип основан на изменении сопротивления при перемещении скользящего контакта по резистивному элементу. Простые и недорогие, но требуют механического контакта.
5. Магнитострикционные датчики
Используют явление магнитострикции для определения положения магнитного элемента, перемещающегося вдоль волновода. Обеспечивают высокую точность на больших расстояниях.

Принцип работы оптических датчиков перемещения
Оптические датчики перемещения являются одними из самых распространенных благодаря высокой точности и возможности бесконтактного измерения. Рассмотрим принцип работы на примере лазерного триангуляционного датчика:
- Лазерный диод излучает сфокусированный луч света на поверхность объекта
- Отраженный от объекта свет попадает на светочувствительный элемент (ПЗС-линейку) через систему линз
- При изменении расстояния до объекта меняется угол отражения луча
- Смещение светового пятна на ПЗС-линейке пропорционально изменению расстояния
- Сигнал с ПЗС-линейки обрабатывается микропроцессором и преобразуется в значение перемещения
Такая схема позволяет измерять перемещения с субмикронной точностью. Диапазон измерения зависит от конструкции датчика и может составлять от долей миллиметра до сотен миллиметров.
Применение датчиков перемещения в промышленности
Датчики перемещения широко используются в различных отраслях промышленности для решения следующих задач:
Машиностроение:
- Контроль размеров деталей при механической обработке
- Измерение биений валов и шпинделей
- Позиционирование инструмента в станках с ЧПУ
- Контроль износа режущего инструмента
Металлургия:
- Измерение толщины проката
- Контроль прогиба валков прокатных станов
- Определение уровня расплава в ковшах
Строительство:
- Мониторинг осадки и деформации зданий
- Контроль смещений мостовых конструкций
- Измерение прогибов перекрытий
Автомобилестроение:
- Контроль геометрии кузова
- Измерение хода подвески
- Системы активной безопасности
Таким образом, датчики перемещения являются важным инструментом для обеспечения качества и безопасности во многих производственных процессах.
Преимущества и недостатки различных типов датчиков перемещения
При выборе датчика перемещения для конкретной задачи необходимо учитывать особенности различных типов:
Оптические датчики:
Преимущества:
- Высокая точность (до долей микрона)
- Бесконтактное измерение
- Широкий диапазон измерений
- Высокое быстродействие
Недостатки:

- Чувствительность к загрязнениям и вибрациям
- Зависимость от оптических свойств поверхности
- Относительно высокая стоимость
Индуктивные датчики:
Преимущества:
- Простота конструкции и надежность
- Нечувствительность к загрязнениям
- Работа в агрессивных средах
Недостатки:
- Ограниченный диапазон измерений
- Применимы только для металлических объектов
- Влияние температуры на точность
Ультразвуковые датчики:
Преимущества:
- Большой диапазон измерений
- Нечувствительность к оптическим свойствам поверхности
- Возможность работы в запыленной среде
Недостатки:
- Невысокая точность
- Зависимость от температуры и состава среды
- Наличие «мертвой зоны» вблизи датчика
Выбор оптимального типа датчика перемещения зависит от конкретных требований к точности, диапазону измерений, условиям эксплуатации и бюджету проекта.
Перспективы развития датчиков перемещения
Современные тенденции в развитии датчиков перемещения направлены на:
- Повышение точности и разрешающей способности
- Расширение диапазона измерений
- Улучшение быстродействия
- Миниатюризацию конструкции
- Интеграцию с системами беспроводной передачи данных
- Разработку интеллектуальных датчиков с функциями самодиагностики
- Снижение энергопотребления
Особое внимание уделяется созданию комбинированных датчиков, сочетающих преимущества различных методов измерения. Например, совмещение оптических и индуктивных принципов позволяет расширить функциональные возможности и области применения датчиков перемещения.

Развитие технологий машинного обучения и искусственного интеллекта открывает новые перспективы для повышения точности и надежности измерений в сложных условиях эксплуатации.
Таким образом, датчики перемещения продолжают совершенствоваться, обеспечивая все более широкие возможности для автоматизации и контроля в различных отраслях промышленности и техники.
Датчики перемещения: выбор и примеры использования
Главная Информация Датчики перемещения: выбор и примеры использования
Датчики перемещения TML используются для измерения различного типа перемещений, например, перемещений в строительных конструкциях, узлах и механизмах машин, а также удлинения и развития трещин в процессе механических испытаний материалов. Они широко используются в различных областях, начиная с исследовательских задач и заканчивая мониторингом особо ответственных гражданских и промышленных объектов. Мы предлагаем широкий спектр датчиков перемещения для всех типов объектов измерений и видов монтажа, при этом датчики легко подключаются ко всем типам тензометрических систем сбора данных или аналогичных систем для многоканальных автоматических измерений.
Описание Документация
Выходная полярность в зависимости от нагрузки
Измеренное значение меняется в положительном (+) направлении, если расстояние между датчиком перемещения и контактной точкой увеличивается, или если расстояние между двумя контактными точками увеличивается (при измерении развития трещин).
Выбор датчика перемещения
Примеры использования датчиков перемещения
Классическое измерение перемещений
Такая схема измерений рекомендована для мониторинга деформаций элементов конструкций и измерения движения объектов.
Измерение изгиба балки
Эта конфигурация используется для измерения изгиба балки под нагрузкой.
Измерение развития трещин в бетоне
Эта конфигурация используется для измерения раскрытия трещин при ее распространении в бетоне.
Измерение перемещения и деформации изгиба
Эта конфигурация используется для измерения перемещений и деформаций изгиба на вилочном автопогрузчике.
» >
Датчики перемещения
pdf, 559.12 КБ» >
Принадлежности для датчиков перемещения
pdf, 721.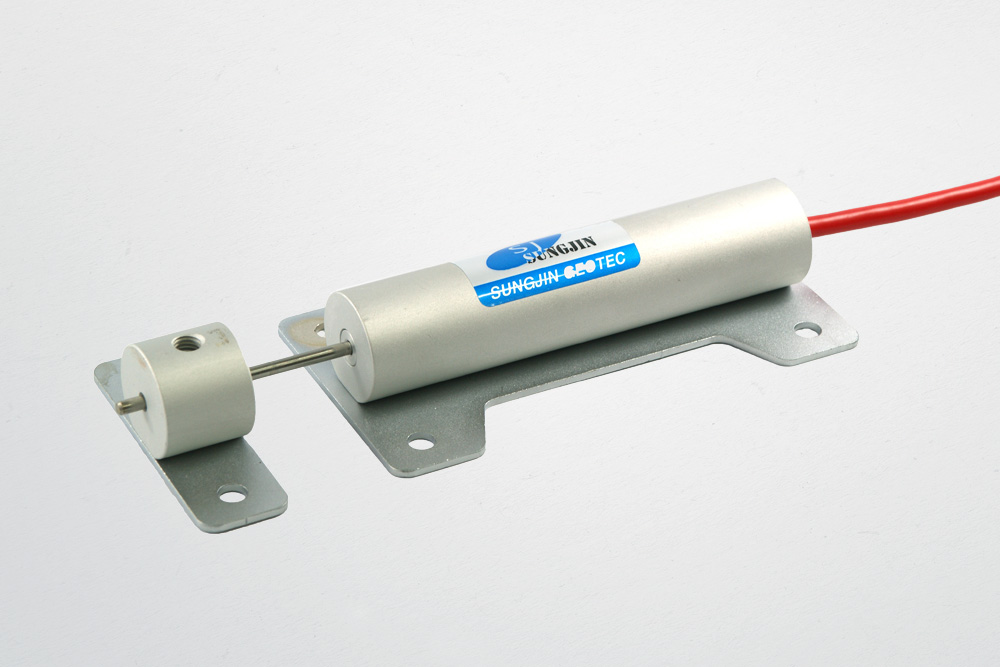 59 КБ
59 КБСопутствующая продукция
CDP-M КомпактныеДатчики перемещения
CDP Общего назначенияДатчики перемещения
DP-E Для натяжения тросаДатчики перемещения
PI П-образной формыДатчики перемещения
SDP-C Общего назначенияДатчики перемещения
DDP-A Часового типаДатчики перемещения
Возврат к списку
Все материалы, представленные на сайте, в приложенных файлах и описаниях, носят информационный характер. Просим Вас руководствоваться только той информацией, которая указана в соответствующем договоре/соглашении/счете/техническом предложении, полученном от ООО «Японские измерительные технологии» по официальным каналам (электронный адрес [email protected], либо иная форма отправления, позволяющая точно определить отправителя). Производитель оборудования компания Tokyo Measuring Instruments Laboratory Co., Ltd, официальный дистрибьютор ООО «Японские измерительные технологии» оставляют за собой право в любой момент изменять информацию, размещенную на сайтах. Для размещения заказа на интересующее оборудование просим Вас связаться с нами любым из удобных способов: оставив заявку на обратный звонок или позвонив нам, отправив заявку через сайт или по электронной почте, положив в «Корзину» интересующие Вас позиции и отправив заявку таким способом. Мы обязательно свяжемся с Вами.
Производитель оборудования компания Tokyo Measuring Instruments Laboratory Co., Ltd, официальный дистрибьютор ООО «Японские измерительные технологии» оставляют за собой право в любой момент изменять информацию, размещенную на сайтах. Для размещения заказа на интересующее оборудование просим Вас связаться с нами любым из удобных способов: оставив заявку на обратный звонок или позвонив нам, отправив заявку через сайт или по электронной почте, положив в «Корзину» интересующие Вас позиции и отправив заявку таким способом. Мы обязательно свяжемся с Вами.
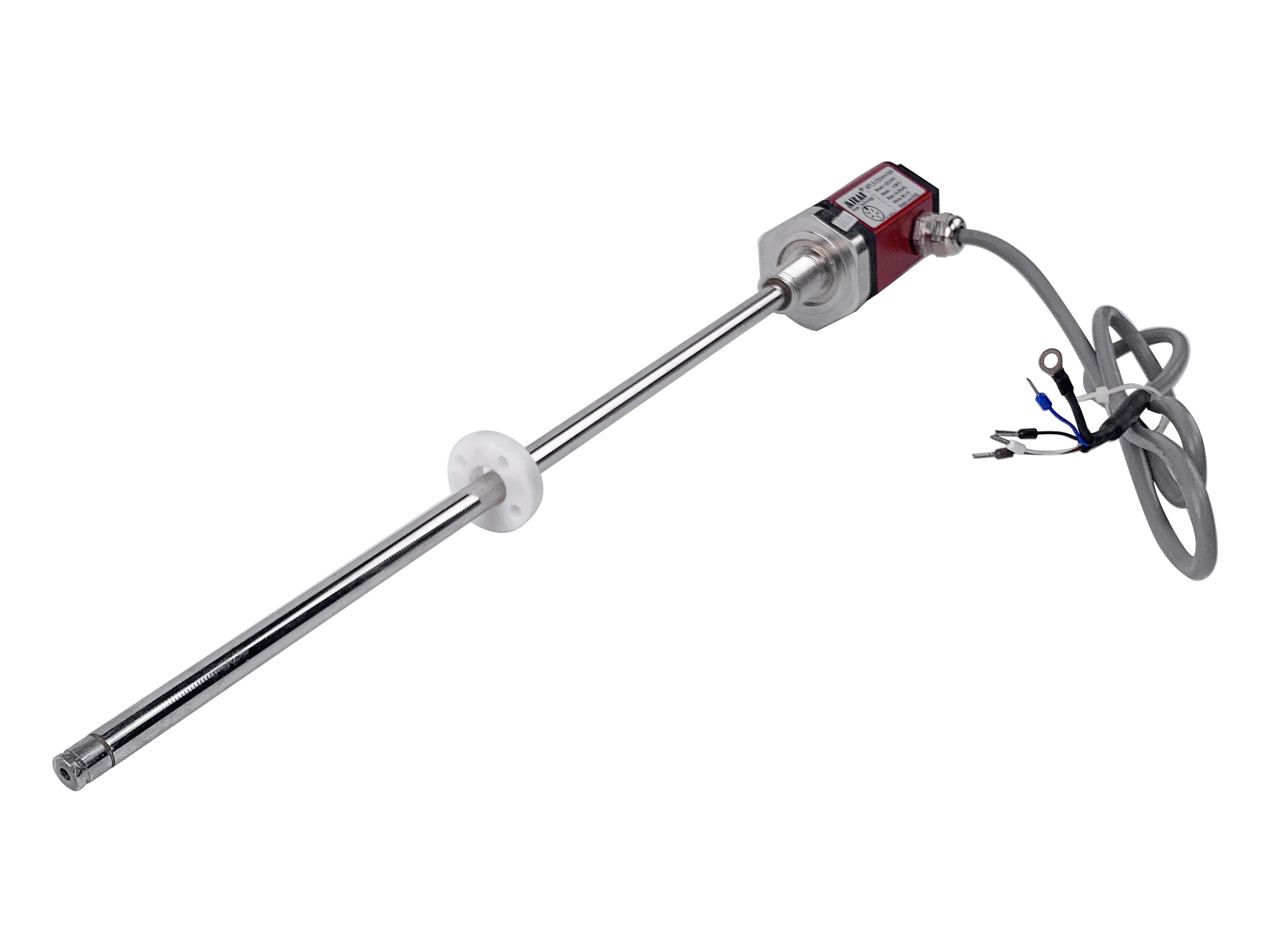
Датчик перемещения RM-HYD-F18, схема, характеристики
- Гидравлическая серия.
- Диапазоны измерений 2…200 мм.
- Линейность ±0,20% от полной шкалы.
- Степень защиты IP67, опционально IP68.
- Обнаружение обрыва кабеля.
- Высокая ЭМС.
Цена зависит от комплектации
Продаются только в комплекте к тензостанции ZET 058 или ZET 017-T8
Характеристики
индуктивных датчиков перемещения RM-HYD-F18
| Технические характеристики | |
|---|---|
| Диапазон измерений | 0-2…200 мм |
| Тип штока | Подпружиненный шток (до диапазона 0…50 мм), свободный шток, направленный/ненаправленный шток толкателя |
| Точность | 0,3 % (0,2 % – опция) |
| Выходной сигнал | 0…20 мА, 4…20 мА (нагрузка 5 кОм) 0…10 В, ± 10 В (нагрузка >10 кОм) |
| Питание | 24 В (12…36 В DC), 15 В (12…18 В DC) |
| Входной ток | 65 мА |
| Класс защиты | IP67, опционально IP68 |
| Класс защиты места присоединительного фланца | IP68 / 150 бар |
| Рабочая температура | −40…+120 °С (опционально до +150 °С) |
| Установка | Фланец с присоединительной резьбой M18 |
| Корпус | Никелированная сталь |
| Подключение | Кабельный выход или разъём M12 со стяжной гайкой |
| Кабель из ТПЭ (стандарт) | ∅4,5 мм, 0,14 мм2, не галогеновый, подходит для кабельных цепей |
| ПТФЭ (опция H) | ∅3,6 мм, 0,24 мм2, макс. температура 205 °C температура 205 °C |
| Длина кабеля стандартная | 2 м |
| Максимальная длина кабеля (между датчиком и блоком электроники) | 100 м |
Вид подключения
индуктивных датчиков перемещения RM-HYD-F18
Регулировка нулевой точки и усиления
в индуктивных датчиках перемещения RM-HYD-F18
Пожалуйста, учтите, что нулевая точка и усиление может смещаться при больших расстояниях между датчиком и электроникой. Поэтому сначала нужно установить датчик на требуемом расстоянии от электроники и только после этого регулируйте нулевую точку и усиление.
1. Шток полностью задвинут — регулировка смещения. Переместите шток датчика к нулевой точке измерительного диапазона и установите потенциометр смещения на 4 мА/ 0 В для выходного сигнала.
2. Шток полностью выдвинут — регулировка усиления. Переместите шток датчика в конец измерительного диапазона (шток толкателя выдвинут) и установите патенциометр усиления на 20 мА / 10 В / 5 В для выходного сигнала.
3. Отрегулируйте смещение (только для выхода 4…20 мА). Установите смещение потенциометра на 20 мА (+4 мА) для выходного сигнала.
Инверсия сигнала: если требуется инвертированный выходной сигнал (20…4 мА/ 10…0 В/ 5…0 В), поменяйте местами контакты 6 и 8 (вторичная обмотка) на внешней электронике.
Выход переменного тока
в индуктивных датчиках перемещения RM-HYD-F18
Габариты
индуктивных датчиков перемещения RM-HYD-F18
| Диапазон (п.ш.), мм | Длина корпуса В, | Длина корпуса С | Максимальная длина А | Длина свободного штока D, мм | Длина штока толкателя Е, мм |
|---|---|---|---|---|---|
| Радиальный кабельные выход/разъём, мм | Разъём М12, мм | Механика подпружиненного штока, мм | |||
| 0…2 | 53 | 60 | 39 | 22 | 62 |
| 0…5 | 59 | 66 | 42 | 25 | 68 |
| 0…10 | 69 | 76 | 47 | 30 | 78 |
| 0…25 | 99 | 106 | 62 | 45 | 108 |
| 0…50 | 149 | 156 | 87 | 70 | 158 |
| 0…100 | 249 | 256 | — | 120 | 258 |
| 0…200 | 449 | 456 | — | 220 | 458 |
Датчики перемещения / датчики измерения
Что такое датчик смещения?
Датчик смещения — это устройство, которое измеряет расстояние между датчиком и объектом, определяя величину смещения различных элементов и преобразовывая ее в расстояние. В зависимости от того, какой элемент используется, существует несколько типов датчиков, таких как оптические датчики смещения, линейные датчики приближения и ультразвуковые датчики смещения.
В зависимости от того, какой элемент используется, существует несколько типов датчиков, таких как оптические датчики смещения, линейные датчики приближения и ультразвуковые датчики смещения.
- Верх страницы
Что такое измерительный датчик?
Измерительный датчик — это устройство, которое измеряет размеры объекта путем преобразования изменений количества света в электрические сигналы, когда объект прерывает широкий лазерный луч.
- Верх страницы
Особенности
1. Физическую величину объекта можно измерить.
Датчик смещения измеряет и обнаруживает изменения (смещение) физической величины.
Датчик может измерять высоту, ширину и толщину объекта, определяя величину смещения этого объекта.
Датчик измерения измеряет положение и размеры объекта.
2. Помимо вывода сигнала ВКЛ/ВЫКЛ также возможен вывод физической величины.
Аналоговый вывод физических величин (выход по току или выход по напряжению) также может быть выполнен (за исключением некоторых моделей).
Некоторые модели также поддерживают цифровую (последовательную) связь.
- Верх страницы
Принципы работы и классификация
Датчики смещения
1. Оптические датчики перемещения
Метод измерения триангуляции
Эти датчики используют триангуляционную систему измерения.
Некоторые датчики используют PSD, а другие используют устройство формирования изображения (CCD и CMOS) в качестве светоприемного элемента.
• Метод PSD
Свет от источника света конденсируется линзой и направляется на объект.![]()
Свет, отраженный от объекта, конденсируется на одномерном датчике положения (PSD)* принимающей линзой. Если положение объекта (расстояние до измерительного устройства) изменится, позиции формирования изображения на PSD будут другими, и изменится баланс двух выходов PSD.
Если два выхода — A и B, рассчитайте A/(A + B) и используйте соответствующие значения для коэффициента диапазона «k» и смещения «C», как показано ниже.
* PSD: позиционно-чувствительный прибор
• Метод устройства формирования изображения (метод ПЗС и метод КМОП)
По сравнению с датчиком, использующим метод PSD, датчик, использующий КМОП (ПЗС) в качестве светоприемного элемента, обеспечивает более точное измерение смещения без влияния цвета поверхности и текстуры объектов.
Датчик определяет количество света на отдельных пикселях в КМОП (ПЗС) и преобразует их в расстояние, когда точечный луч, отражающийся от поверхности объекта, проецируется на светоприемный элемент.
Различия между CMOS и CCD
CCD означает устройство с зарядовой связью, а CMOS означает Complementary Metal Oxide Semiconductor.
• Модель регулярного отражения и модель диффузного отражения
Регулярное отражение
Создается зеркальное отражение, например, от зеркального или глянцевого объекта.
Рассеянное отражение
Луч отражается во всех направлениях от объекта со стандартной поверхностью.
Модель регулярного отражения
Свет от объекта принимается путем регулярного отражения, и возможно стабильное измерение металлических и других объектов с глянцевой поверхностью.
Модель диффузного отражения
Луч света проецируется перпендикулярно на поверхность объекта, а рассеянный свет, отраженный назад, принимается для широкой области измерения.
Сенсорные головки с регулярным отражением получают прямой свет от регулярных отражений от объекта. Стабильные измерения могут быть достигнуты для объектов из металла или других материалов с глянцевой поверхностью, но диапазон измерения более узкий, чем у датчиков диффузного отражения.
Датчики диффузного отражения используют сенсорную головку, наклоненную под углом для приема света с правильным отражением. Это позволяет размещать головку датчика на расстоянии от объекта.
• Линейные и точечные лучи
Модель линейного луча
Эта модель измеряет среднее смещение в линейной балке. В зависимости от условий измерения эта модель обеспечивает стабильные измерения, на которые не влияют бугры или неровности на поверхности объекта.
Точечный луч Модель
Данная модель более чувствительна к влиянию неровностей или неровностей поверхности объекта.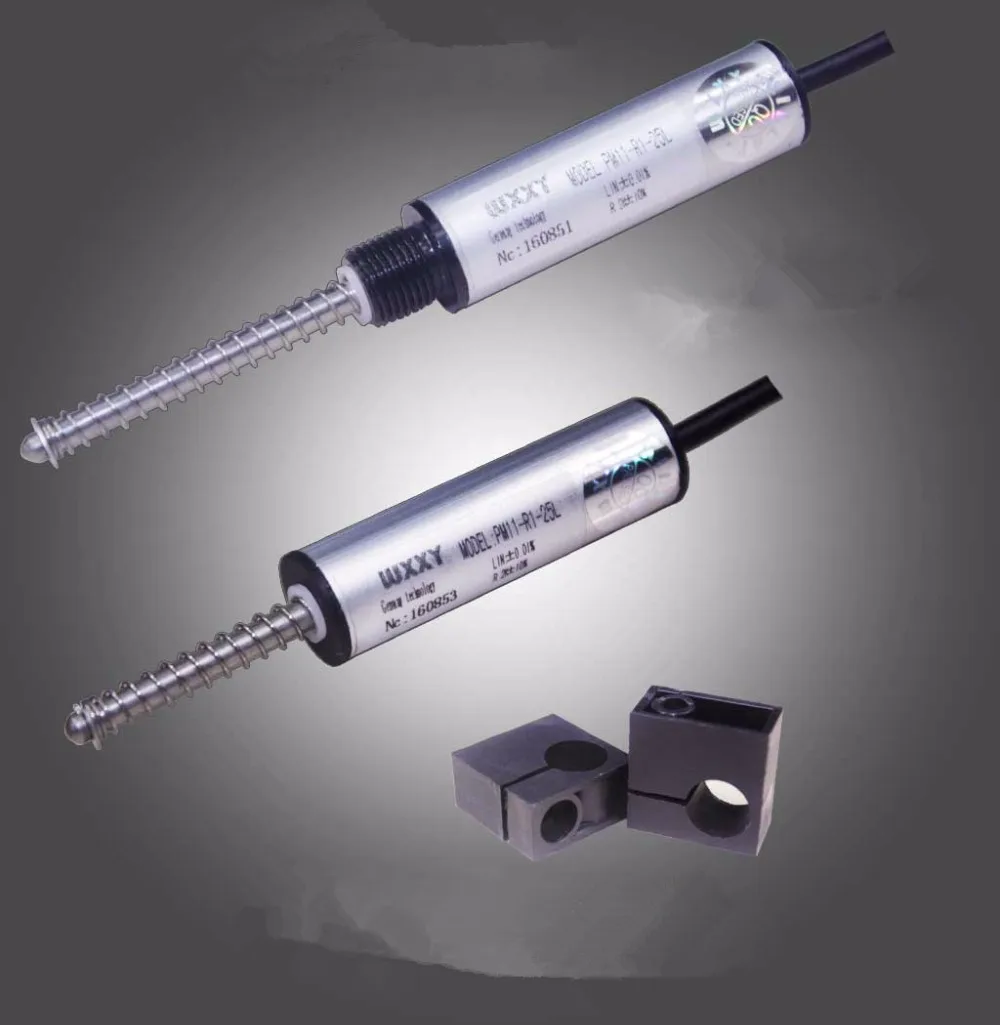
Принцип конфокальности
На основе принципа конфокальности излучаемый и принимаемый свет располагаются вдоль одной и той же оси. Свет принимается только тогда, когда он сфокусирован на объекте измерения, что позволяет рассчитать высоту.
Форма полученной световой волны не нарушена материалом или наклоном объекта измерения. Полученная форма светового сигнала всегда стабильна, что позволяет выполнять измерения с высоким разрешением.
• Принцип конфокальности белого света
Белый свет светодиода фокусируется в разных точках для каждого цвета (т. е. длины волны) благодаря специальному набору линз в модуле OCFL в сенсорной головке. В результате возвращается только цвет света, сфокусированного на объекте измерения, что позволяет рассчитать расстояние от головки датчика до объекта измерения на основе цвета отраженного света. Сенсорная головка содержит специальный набор линз, который разделяет белый свет на разные цвета, а контроллер содержит белый светодиодный источник света, а также спектроскоп и процессор, которые преобразуют цвет отраженного света в расстояние. В сенсорной головке нет необходимости в механизме привода линзы или электронных компонентах, даже если они считались стандартными в предыдущих конфокальных моделях. Это обеспечивает гораздо более компактную конструкцию и гораздо большую устойчивость к шуму, чем модели триангуляции и/или предыдущие конфокальные модели.
В сенсорной головке нет необходимости в механизме привода линзы или электронных компонентах, даже если они считались стандартными в предыдущих конфокальных моделях. Это обеспечивает гораздо более компактную конструкцию и гораздо большую устойчивость к шуму, чем модели триангуляции и/или предыдущие конфокальные модели.
Высота определяется на основе длины волны.
Отраженный свет той длины волны, которая была сфокусирована на поверхности объекта измерения, проходит через волокно, и спектроскоп в контроллере преобразует длину волны в расстояние.
Модуль OCFL содержит специальный набор линз, разработанный OMRON, который изменяет точку фокусировки для каждого цвета (т. е. длины волны) белого света. Диаметр пятна одинаков в любом положении в пределах диапазона измерений. Это не меняет того, как это делается для триангуляции. Высокоточная технология изготовления линз позволила нам создать очень маленькую конструкцию линзы, для которой также не требуется приводной механизм.
Примечание: OCFL: объектив Omron с хроматической фокусировкой
Метод световой резки
Широко распространенный лазерный луч проецируется на объект измерения для измерения формы его поперечного сечения.
Ленточный лазерный луч проецируется на объект измерения, и отражение от объекта принимается ПЗС. Профиль формы объекта измерения формируется по принципу треугольного измерения расстояния.
Поскольку 2D-данные по осям X и Z измеряются одновременно, нет необходимости перемещать ни датчик, ни объект измерения.
2. Линейные датчики приближения
Когда переменный ток проходит через катушку, в катушке возникает магнитный поток. Когда магнитный поток проходит через металлический предмет, он создает вихревые токи, которые генерируют магнитное поле, противодействующее изменениям тока. В результате изменяется индуктивность катушки. Функция между расстоянием от катушки до объекта определяется с точки зрения изменения индуктивности, и можно рассчитать расстояние смещения.
По мере уменьшения расстояния между металлическим объектом и головкой датчика вихревые токи увеличиваются, а амплитуда колебаний колебательного контура уменьшается.
И наоборот, по мере увеличения расстояния между металлическим объектом и головкой датчика вихревые токи уменьшаются, а амплитуда колебаний колебательного контура увеличивается.
Амплитуда колебаний колебательного контура изменяется при изменении положения металлического предмета, поэтому измерения проводятся путем обнаружения этих изменений амплитуды колебаний.
3. Ультразвуковые датчики перемещения
Передатчик посылает ультразвуковые волны к объекту, а приемник принимает обратно от него отраженные волны. Этот тип датчика определяет расстояние, вычисляя соотношение между временем, необходимым для отправки и приема ультразвуковых волн, и скоростью звука.
4. Датчики смещения контактов
Датчик этого типа измеряет смещение посредством прямого контакта измеряемого объекта с датчиком.
Обеспечивает более высокую точность измерения по сравнению с бесконтактными датчиками.
Метод дифференциального трансформатора
Когда головка датчика касается объекта, она давит на движущийся сердечник, и центр сердечника отдаляется от центра катушки, создавая зазор. Когда оба конца соединенных двух катушек возбуждаются переменным током, полное сопротивление обеих катушек изменяется в зависимости от зазора между центром катушки и центром сердечника. Этот зазор (смещение) выводится линейно как дифференциальное напряжение катушек, и, следовательно, смещение объекта может быть определено путем обнаружения этого дифференциального напряжения.
Типичная модель: ZX-T
Метод магнитного зондирования
Когда головка датчика касается объекта, магнитная шкала с северным и южным полюсами, расположенными попеременно с мелким шагом внутри датчика, перемещается.
Изменение магнитного потока, происходящее в это время, определяется датчиком магнитного сопротивления для определения смещения.
Типовая модель: E9NC-T
Датчики измерения
Оптические измерительные датчики
Измерительные датчики, которые измеряют ширину или положение объектов, используют один из следующих трех методов: определение интенсивности света, устройство формирования изображения или лазерное сканирование.
Все типы измерительных датчиков состоят из излучателя и приемника.
- Скачать PDF (2509 КБ)
Что такое датчики перемещения (измерители перемещений) и системы измерения размеров? | Основы измерения | Библиотека измерений
- Что такое датчики смещения (измерители смещения)?
- Различные приложения
Датчик смещения (измеритель смещения) используется для измерения диапазона перемещения между местом, где находится объект, и исходным положением. Датчики смещения можно использовать для измерения размеров, чтобы определить высоту, толщину и ширину объекта в дополнение к диапазону перемещения. Необходимо выбрать наиболее подходящее оборудование в соответствии с применением, требуемой точностью и условиями использования. Измерения с датчиками перемещения можно разделить на две большие категории: бесконтактные измерения с использованием световых или магнитных полей/звуковых волн или контактные измерения, выполняемые при непосредственном контакте с целью.
Необходимо выбрать наиболее подходящее оборудование в соответствии с применением, требуемой точностью и условиями использования. Измерения с датчиками перемещения можно разделить на две большие категории: бесконтактные измерения с использованием световых или магнитных полей/звуковых волн или контактные измерения, выполняемые при непосредственном контакте с целью.
Принципы и особенности каждого метода следующие.
| Товар | Бесконтактный тип | Тип контакта | |||
|---|---|---|---|---|---|
| Оптический тип | Вихретоковый тип | Ультразвуковой тип | Метод лазерной фокусировки | ||
| Цели обнаружения | Большинство целей | Металл | Большинство целей | Большинство целей | Твердый |
| Расстояние измерения | Обычный | Короткий | Длинный | Короткий | Короткий |
| Точность | Высокий | Высокий | Низкий | Высокий | Высокий |
| Скорость отклика | Быстро | Быстро | Медленный | Обычный | Медленный |
| Пыль, вода, масло и т. | Обычный | Сильный | Обычный | Обычный | Сильный |
| Поверхность измерения | Маленький | Обычный | Большой | Маленький | Маленький |
(измерители перемещений) используются для самых разных целей. Ниже приведены несколько примеров.
| Намерение | Пример |
|---|---|
| Толщина | Измерение того, является ли толщина листового проката однородной, толщина многослойного стекла соответствует стандартам и т. д. |
| Высота и шаг | Измерение равномерности высоты выровненных печатных плат и наличия необычных ступенек на микросхемах, собранных на печатных платах. |
| Наружный диаметр | Измерение наружного диаметра серийно выпускаемых цилиндрических компонентов для определения их приемлемости или непригодности. Похожие записи
. |