Что такое датчики прикосновения и приближения. Как работают емкостные и сенсорные датчики. Где применяются датчики приближения в быту и промышленности. Какие бывают виды датчиков и методы измерения емкости.
Что такое датчики прикосновения и приближения
Датчики прикосновения и приближения — это устройства, которые реагируют на приближение или прикосновение объектов. Они широко применяются в бытовой технике, промышленности, автомобилях и электронных устройствах.
Основные виды таких датчиков:
- Емкостные датчики — реагируют на изменение электрической емкости при приближении объекта
- Сенсорные датчики — срабатывают при непосредственном прикосновении
- Оптические датчики — используют инфракрасное излучение для обнаружения объектов
Рассмотрим подробнее принципы работы и применение различных видов датчиков прикосновения и приближения.
Принцип работы емкостных датчиков приближения
Емкостные датчики приближения основаны на изменении электрической емкости при приближении объекта к чувствительному элементу датчика. Их работа базируется на следующих принципах:

- Емкость между двумя объектами обратно пропорциональна расстоянию между ними
- При приближении объекта к датчику увеличивается емкость между ними
- Изменение емкости преобразуется в электрический сигнал
Существует два основных типа емкостных датчиков:
1. Датчик с двумя чувствительными элементами
В такой схеме используются два электрода. При приближении объекта увеличивается взаимная емкость между электродами. Недостаток — невысокая чувствительность.
2. Датчик с одним чувствительным элементом
Содержит один электрод, емкость которого увеличивается при приближении объекта. Обладает более высокой чувствительностью.
Емкостные датчики просты по конструкции, но имеют низкую помехоустойчивость.
Методы измерения емкости в датчиках приближения
Для определения изменения емкости в датчиках приближения используются различные методы:
1. Прямой метод измерения
Заключается в заряде конденсатора от источника тока и измерении напряжения на нем. Требует прецизионных компонентов.2. Метод RC-генератора
Измеряемая емкость используется в качестве времязадающего элемента генератора. Измеряется частота или период колебаний. Простой, но не очень точный метод.
3. Измерение импеданса на переменном токе
Позволяет получить высокую точность, но требует сложной схемы измерения.
4. Метод последовательного приближения
Использует коммутируемую емкостную цепь и компаратор. Требует минимум внешних компонентов.
5. Сигма-дельта модулятор
Обеспечивает высокую помехоустойчивость. Идеально подходит для бытовой техники и промышленных применений.
Конструкция чувствительного элемента емкостного датчика
Чувствительный элемент емкостного датчика приближения может быть выполнен в виде:
- Металлической пластины
- Проводника на печатной плате
- Части металлического корпуса устройства
Размеры и форма чувствительного элемента влияют на чувствительность датчика. Оптимальные параметры обычно подбираются экспериментально.
Для защиты от помех используются экраны и фильтры в схеме обработки сигнала.
Применение емкостных датчиков приближения
Емкостные датчики приближения нашли широкое применение в различных областях:
- Бытовая техника — сенсорные панели управления, датчики открытия дверей
- Промышленность — датчики положения, счетчики предметов на конвейере
- Автомобили — датчики присутствия пассажира, системы бесключевого доступа
- Смартфоны — датчики приближения для отключения экрана во время разговора
- Охранные системы — датчики движения и присутствия
Емкостные датчики удобны там, где не требуется высокая точность и помехозащищенность.

Сенсорные датчики прикосновения
Сенсорные датчики срабатывают при непосредственном прикосновении к чувствительной поверхности. Их работа основана на следующих принципах:- Изменение емкости при прикосновении
- Замыкание электрической цепи через тело человека
- Изменение сопротивления проводящего слоя
Сенсорные датчики прикосновения применяются в:
- Сенсорных экранах смартфонов и планшетов
- Панелях управления бытовой техники
- Кнопках лифтов и терминалов
- Электронных выключателях освещения
Преимущества сенсорных датчиков — отсутствие механических частей, долговечность, влагозащищенность.
Датчик приближения в смартфоне
Практически все современные смартфоны оснащены датчиком приближения. Он выполняет следующие функции:
- Отключает экран при поднесении телефона к уху во время разговора
- Предотвращает случайные нажатия на сенсорный экран щекой
- Экономит заряд аккумулятора за счет выключения дисплея
Датчик приближения в смартфоне обычно расположен рядом с фронтальной камерой и динамиком. Он представляет собой миниатюрный инфракрасный излучатель и приемник.

Как проверить работу датчика приближения на смартфоне?
Чтобы убедиться в исправности датчика приближения:
- Наберите любой номер на телефоне
- Поднесите смартфон к уху — экран должен погаснуть
- Уберите смартфон от лица — экран должен включиться
Если экран не реагирует должным образом, возможно, датчик неисправен или требуется калибровка.
Проблемы с датчиками приближения и их решение
Иногда пользователи сталкиваются с некорректной работой датчиков приближения. Основные проблемы и способы их устранения:
Экран не выключается при поднесении к уху
Возможные причины:
- Загрязнение датчика — протрите область датчика
- Сбой калибровки — выполните калибровку датчика
- Неисправность датчика — обратитесь в сервисный центр
Экран не включается после завершения разговора
Попробуйте следующие действия:
- Перезагрузите смартфон
- Обновите прошивку устройства
- Выполните сброс настроек
Как откалибровать датчик приближения?
Для калибровки датчика:
- Установите специальное приложение для калибровки
- Следуйте инструкциям приложения
- Закройте и откройте датчик несколько раз
- Перезагрузите смартфон
Если проблемы с датчиком сохраняются после калибровки, обратитесь в сервисный центр для диагностики.

Заключение
Датчики прикосновения и приближения стали неотъемлемой частью современных электронных устройств. Они обеспечивают удобное управление техникой и расширяют ее функциональность. Разнообразие типов датчиков позволяет подобрать оптимальное решение для различных задач — от бытовой техники до промышленной автоматизации.
Развитие технологий ведет к постоянному совершенствованию датчиков, повышению их чувствительности и надежности. В будущем можно ожидать появления еще более компактных и эффективных датчиков прикосновения и приближения.
Сенсорный датчик прикосновения. Схема и подробное описание
Как известно, сенсорный датчик прикосновения — любая металлическая поверхность, например, металлический предмет, пластина или дверная ручка. У сенсоров отсутствуют механические элементы, что в свою очередь придает им значительную надежность.
Сфера использования подобных устройств достаточно широка это и включение звонка, выключатель света, управление электронными устройствами, сигнализация для дома, группа датчиков сигнализаций и прочее. Когда это необходимо, использование сенсорного датчика позволяет обеспечить скрытое размещение включателя.
Описание работы сенсорного датчика прикосновения
Функционирование ниже приведенной схемы сенсора основывается на применении имеющегося в домах электромагнитного поля, которое создает размещенная в стенах электропроводка.
Прикосновение к датчику сенсора рукой равносильно подсоединению антенны к чувствительному входу усилителя. В результате этого наведенное сетевое электричество поступает на затвор полевого транзистора, который играет роль электронного переключателя.
В результате этого наведенное сетевое электричество поступает на затвор полевого транзистора, который играет роль электронного переключателя.
Данный сенсорный датчик прикосновения достаточно прост вследствие применения полевого транзистора КП501А (Б, В). Данный транзистор обеспечивает пропускание тока до180 мА при предельном напряжении исток-сток до 240В для буквы А и 200В для букв Б и В. Для защиты от статического электричества на его входе имеется диод.
Полевой транзистор обладает большим входным сопротивлением, и для того чтобы управлять им хватает статического напряжения, которое больше порогового значения. Для данного типа полевого транзистора номинальное пороговое напряжение составляет 1…3 В, а максимально допустимое равно 20 В.
При прикосновении рукой к датчику Е1, степень наведенного потенциала на затворе является достаточной для открывания транзистора. При этом на стоке VT1 будут электрические импульсы продолжительностью 35 мс, и имеющие частоту электрической сети 50 Гц. Для переключения большинства электромагнитных реле необходимо всего 3…25 мс. Для предотвращения дребезга контактов реле, в момент прикосновения, в схему включен конденсатор C2. За счет накопленного заряда на конденсаторе, реле будет включенным даже в тот полупериод сетевого напряжения, когда VT1 будет закрыт. Пока есть прикосновение к датчику сенсора, реле будет во включенном состоянии.
Конденсатор C1 увеличивает помехоустойчивость сенсора к высокочастотным радиопомехам. Менять чувствительность прикосновения к сенсору можно путем изменения емкости C1 и сопротивления R1. Группа контактов К1.1 осуществляет управление внешними электронными устройствами.
Добавив к данной схеме триггер и узел коммутации сетевой нагрузкой можно получить сенсорный выключатель света.
Источник: «Полезные схемы», Шелестов И.П.
Емкостной сенсорный датчик, электрическая схема, печатная плата
Емкостной датчик – это один из типов бесконтактных датчиков, принцип работы которого основан на изменении диэлектрической проницаемости среды между двух обкладок конденсатора. Одной обкладкой служит сенсорный датчик схемы в виде металлической пластины или провода, а второй – электропроводящее вещество, например, металл, вода или тело человека.
При разработке системы автоматического включения подачи воды в унитаз для биде возникла необходимость применения емкостного датчика присутствия и выключателя, обладающих высокой надежностью, устойчивостью к изменению внешней температуры, влажности, пыли и питающему напряжению. Хотелось также исключить необходимость прикосновения человека с органами управления системы. Предъявляемые требования могли обеспечить только схемы сенсорных датчиков, работающих на принципе изменения емкости. Готовой схемы удовлетворяющей необходимым требованиям не нашел, пришлось разработать самостоятельно.
Получился универсальный емкостной сенсорный датчик, который не требует настройки и реагирует на приближающиеся электропроводящие предметы, в том числе и человека, на расстояние до 5 см. Область применения предлагаемого сенсорного датчика не ограничена. Его можно применять, например, для включения освещения, систем охранной сигнализации, определения уровня воды и в многих других случаях.
Электрические принципиальные схемы
Для управления подачей воды в биде унитаза понадобилось два емкостных сенсорных датчика. Один датчик нужно было установить непосредственно на унитазе, он должен был выдавать сигнал логического нуля при присутствии человека, а при отсутствии сигнал логической единицы. Второй должен был служить включателем воды и находиться в одном из двух логических состояний.
При поднесении к сенсору руки датчик должен был менять логическое состояние на выходе – из исходного единичного состояния переходить в состояние логического нуля, при повторном прикосновении руки из нулевого состояния переходить в состояние логической единицы. И так до бесконечности, пока на сенсорный включатель поступает разрешающий сигнал логического нуля с датчика присутствия.
Схема емкостного сенсорного датчика
Основой схемы емкостного сенсорного датчика присутствия является задающий генератор прямоугольных импульсов, выполненный по классической схеме на двух логических элементах микросхемы D1.1 и D1.2. Частота генератора определяется номиналами элементов R1 и C1 и выбрана около 50 кГц. Значение частоты на работу емкостного датчика практически не влияет. Я менял частоту от 20 до 200 кГц и влияния на работу устройства визуально не заметил.
С 4 вывода микросхемы D1.2 сигнал прямоугольной формы через резистор R2 поступает на входы 8, 9 микросхемы D1.3 и через переменный резистор R3 на входы 12,13 D1.4. На вход микросхемы D1.3 сигнал поступает с небольшим изменением наклона фронта импульсов из-за установленного датчика, представляющего собой кусок провода или металлическую пластину. На входе D1.4, из за конденсатора С2, фронт изменяется на время, необходимое для его перезаряда. Благодаря наличию подстроечного резистора R3, есть возможность фронты импульса на входе D1.4, выставить равным фронту импульса на входе D1.3.
Если приблизить к антенне (сенсорному датчику) руку или металлический предмет, то емкость на входе микросхемы DD1.3 увеличится и фронт поступающего импульса задержатся во времени, относительно фронта импульса, поступающего на вход DD1.4. чтобы «уловить» эту задержку про инвертированные импульсы подаются на микросхему DD2.1, представляющую собой D триггер, работающий следующим образом. По положительному фронту импульса, поступающего на вход микросхемы C, на выход триггера передается сигнал, который в тот момент был на входе D. Следовательно, если сигнал на входе D не изменяется, поступающие импульсы на счетный вход C не оказывают влияния на уровень выходного сигнала. Это свойство D триггера и позволило сделать простой емкостной сенсорный датчик.
Когда емкость антенны, из за приближения к ней тела человека, на входе DD1.3 увеличивается, импульс задерживается и это фиксирует D триггер, изменяя свое выходное состояние. Светодиод HL1 служит для индикации наличия питающего напряжения, а HL2 для индикации приближения к сенсорному датчику.
Схема сенсорного включателя
Схему емкостного сенсорного датчика можно использовать и для работы сенсорного включателя, но с небольшой доработкой, так как ему необходимо не только реагировать на приближение тела человека, но и оставаться в установившемся состоянии после удаления руки. Для решения этой задачи пришлось к выходу сенсорного датчика добавить еще один D триггер, DD2.2, включенный по схеме делителя на два.
Схема емкостного датчика была немного доработана. Для исключения ложных срабатываний, так как человек может подносить и удалять руку медленно, из-за наличия помех датчик может выдавать на счетный вход D триггера несколько импульсов, нарушая необходимый алгоритм работы включателя. Поэтому была добавлена RC цепочка из элементов R4 и C5, которая на небольшое время блокировала возможность переключение D триггера.
Триггер DD2.2 работает так же, как и DD2.1, но сигнал на вход D подается не с других элементов, а с инверсного выхода DD2.2. В результате по положительному фронту импульса, приходящего на вход С сигнал на входе D изменяется на противоположный. Например, если в исходном состоянии на выводе 13 был логический ноль, то поднеся руку к сенсору один раз, триггер переключится и на выводе 13 установится логическая единица. При следующем воздействии на сенсор, на выводе 13 опять установится логический ноль.
Для блокировки включателя при отсутствии человека на унитазе, с сенсора на вход R (установка нуля на выходе триггера вне зависимости от сигналов на всех остальных его входах) микросхемы DD2.2 подается логическая единица. На выходе емкостного выключателя устанавливается логический ноль, который по жгуту подается на базу ключевого транзистора включения электромагнитного клапана в Блоке питания и коммутации.
Резистор R6, при отсутствии блокирующего сигнала с емкостного датчика в случае его отказа или обрыва управляющего провода, блокирует триггер по входу R, тем самым исключает возможность самопроизвольной подачи воды в биде. Конденсатор С6 защищает вход R от помех. Светодиод HL3 служит для индикации подачи воды в биде.
Конструкция и детали емкостных сенсорных датчиков
Когда я начал разрабатывать сенсорную систему подачи воды в биде, то наиболее трудной задачей мне казалась разработка емкостного датчика присутствия. Обусловлено это было рядом ограничений по установке и эксплуатации. Не хотелось, чтобы датчик был механически связан с крышкой унитаза, так как ее периодически надо снимать для мойки, и не мешал при санитарной обработке самого унитаза. Поэтому и выбрал в качестве реагирующего элемента емкость.
Конструкция сенсорного датчика присутствия
По выше опубликованной схеме сделал опытный образец. Детали емкостного датчика собраны на печатной плате, плата размещена в пластмассовой коробке и закрывается крышкой. Для подключения антенны в корпусе установлен одноштырьковый разъем, для подачи питающего напряжения и сигнала установлен четырех контактный разъем РШ2Н. Соединена печатная плата с разъемами пайкой медными проводниками в фторопластовой изоляции.
Сенсорный емкостной датчик собран на двух микросхемах КР561 серии, ЛЕ5 и ТМ2. Вместо микросхемы КР561ЛЕ5 можно применить КР561ЛА7. Подойдут и микросхемы 176 серии, импортные аналоги. Резисторы, конденсаторы и светодиоды подойдут любого типа. Конденсатор С2, для стабильной работы емкостного датчика при эксплуатации в условиях больших колебаниях температуры окружающей среды нужно брать с малым ТКЕ.
Установлен датчик под площадкой унитаза, на которой установлен сливной бачок в месте, куда в случае протечки из бачка вода попасть не сможет. К унитазу корпус датчика приклеен с помощью двустороннего скотча.
Антенный датчик емкостного сенсора представляет собой отрезок медного многожильного провода длинной 35 см в изоляции из фторопласта, приклеенного с помощью прозрачного скотча к внешней стенке чаши унитаза на сантиметр ниже плоскости очка. На фотографии сенсор хорошо виден.
Для настройки чувствительности сенсорного датчика необходимо после его установки на унитаз, изменяя сопротивление подстроечного резистора R3 добиться, чтобы светодиод HL2 погас. Далее положить руку на крышку унитаза над местом нахождения сенсора, светодиод HL2 должен загораться, если руку убрать, потухнуть. Так как бедро человека по массе больше руки, то при эксплуатации сенсорный датчик, после такой настройки, будет работать гарантировано.
Конструкция и детали емкостного сенсорного включателя
Схема емкостного сенсорного включателя имеет больше деталей и для их размещения понадобился корпус большего размера, да и по эстетическим соображениям, внешний вид корпуса, в котором был размещен сенсорный датчик присутствия не очень подходил для установки на видном месте. Внимание на себя обратила настенная розетка rj-11 для подключения телефона. По размерам она подходила и имела хороший внешний вид. Удалив из розетки все лишнее, разместил в ней печатную плату емкостного сенсорного выключателя.
Для закрепления печатной платы в основании корпуса была установлена короткая стойка и к ней с помощью винта прикручена печатная плата с деталями сенсорного выключателя.
Датчик емкостного сенсора сделал, приклеив ко дну крышки розетки клеем «Момент» лист латуни, предварительно вырезав в них окошко для светодиодов. При закрывании крышки, пружина (взята от кремниевой зажигалки) соприкасается с латунным листом и таким образом обеспечивается электрический контакт между схемой и сенсором.
Крепится емкостной сенсорный включатель на стену с помощью одного самореза. Для этого в корпусе предусмотрено отверстие. Далее устанавливается плата, разъем и закрепляется защелками крышка.
Настройка емкостного выключателя практически не отличается от настройки сенсорного датчика присутствия, описанного выше. Для настройки нужно подать питающее напряжение и резистором отрегулировать, чтобы светодиод HL2 загорался, когда к датчику подносится рука, и гас, при ее удалении. Далее нужно активировать сенсорный датчик и поднести и удалить руку к сенсору выключателя. Должен мигнуть светодиод HL2 и загореться красный светодиод HL3. При удалении руки красный светодиод должен продолжать светиться. При повторном поднесении руки или удалении тела от датчика, светодиод HL3 должен погаснуть, то есть выключить подачу воды в биде.
Универсальная печатная плата
Представленные выше емкостные датчики собраны на печатных платах, несколько отличающихся от печатной платы приведенной ниже на фотографии. Это связано с объединением обеих печатных плат в одну универсальную. Если собирать сенсорный включатель, то необходимо только перерезать дорожку под номером 2. Если собирать сенсорный датчик присутствия, то удаляется дорожка номер 1 и не все элементы устанавливаются.
Не устанавливаются элементы, необходимые для работы сенсорного включателя, но мешающие работе датчика присутствия, R4, С5, R6, С6, HL2 и R4. Вместо R4 и С6 запаиваются проволочные перемычки. Цепочку R4, С5 можно оставить. Она не будет влиять на работу.
Ниже приведен рисунок печатной платы для накатки при использовании термического метода нанесения на фольгу дорожек.
Достаточно распечатать рисунок на глянцевой бумаге или кальке и шаблон готов для изготовления печатной платы.
Безотказная работа емкостных датчиков для сенсорной системы управления подачи воды в биде подтверждена на практике в течении трех лет постоянной эксплуатации. Сбоев в работе не зафиксировано.
Однако хочу заметить, что схема чувствительна к мощным импульсным помехам. Мне приходило письмо о помощи в настройке. Оказалось, что во время отладки схемы рядом находился паяльник с тиристорным регулятором температуры. После выключения паяльника схема заработала.
Еще был такой случай. Емкостной датчик был установлен в светильник, который подключался в одну розетку с холодильником. При его включении свет включался и при повторном выключался. Вопрос был решен подключением светильника в другую розетку.
Приходило письмо об успешном применении описанной схемы емкостного датчика для регулировки уровня воды в накопительном баке из пластика. В нижней и верхней части было приклеено силиконом по датчику, которые управляли включением и выключением электрического насоса.
Датчик приближения в телефоне: что это такое?
С датчиками приближения мы периодически сталкиваемся в жизни, поскольку они нашли массовое применение. Например, в туалетной комнате датчики приближения используются в кранах и сушилках, которые включаются, как только к ним подносишь руку. А что такое датчик приближения в смартфоне или телефоне?
В общем-то, это практически то же самое. Возьмите смартфон, наберите чей-нибудь номер и поднесите устройство к уху — экран отключится. Это сделано главным образом для того, чтобы не происходило рандомных нажатий на сенсорные кнопки. Но есть и другая причина — при разговоре включенный экран мог бы сильно разряжать телефон, особенно если пользователь любит общаться часами. А так производители смогли решить сразу две проблемы одним простым устройством.
Проверить датчик приближения можно по-другому. Он находится в верхней части корпуса, обычно рядом с динамиком. При наборе номера закройте рукой небольшое окошко рядом с динамиком и экран потухнет — это сработал датчик приближения.
Сам по себе датчик имеет небольшой размер. На фото — вместе с модулем камеры:
Такие датчики применяются во всех современных смартфонах, начиная от iPhone и заканчивая смартфонами на базе Android.
Проблемы с датчиком приближения
Как таковых проблем с указанным датчиком быть не должно. Основная претензия может касаться некорректной работы датчика приближения, когда он, к примеру, не выключает экран при подносе устройства к лицу или не включает его после разговора. Обычно достаточно откалибровать экран.
Для калибровки экрана используются специальные приложения, которые можно скачать в том числе на официальном сайте производителя. Иногда функция калибровки уже встроена в прошивку.
В некоторых случаях проблема с датчиком приближения может быть вызвана некоторой проблемой в прошивке. В этом случае надо попробовать перепрошить устройство на ту же или более новую прошивку.
Емкостные датчики приближения — Время электроники
Датчики приближения широко используются в промышленности — в счетных устройствах на конвейере — для определения позиции приборов или других объектов. В последние годы они стали применяться в бытовых устройствах и в автомобильной отрасли. В этой статье рассмотрены принципы работы датчиков приближения.
Строение датчика
Как известно, емкость между двумя объектами обратно пропорциональна расстоянию между ними и прямо пропорциональна их геометрическим размерам.
Система определения близости объектов состоит из чувствительного элемента, блока измерения емкости датчика и логической схемы, реагирующей на изменение емкости при приближении объекта. В качестве чувствительного элемента используется провод, печатный проводник на плате или часть корпуса. Датчики приближения могут иметь один или два чувствительных элемента.
Принцип работы датчика с двумя чувствительными элементами поясняется рисунком 1. Взаимная емкость элементов САВ увеличивается по мере приближения объекта к датчику за счет увеличения емкостей между САХ и СВХ — чувствительным элементом и объектом. По изменению САВ судят о приближении объекта. Недостатком данного подхода является невысокая чувствительность.
Схема датчика с одним чувствительным элементом показана на рисунке 2. При приближении объекта емкость между объектом и датчиком САХ и, соответственно, емкость датчика СА увеличиваются. Чувствительность такой схемы выше, чем предыдущей, что позволяет распознавать объекты на большем расстоянии. Однако обе схемы характеризуются очень низкой помехоустойчивостью и могут давать ложные срабатывания при наличии посторонних металлических предметов. Вместе с тем емкостные датчики имеют простую конструкцию без намоточных деталей (катушек, контуров и т.д.), что делает их удобными и технологичными в изготовлении.
|
Рис. 1. Схема датчика с двумя чувствительными элементами |
|
Рис. 2. Схема датчика с одним чувствительным элементом |
Емкостные датчики применяются там, где высокая чувствительность и помехоустойчивость не требуются, например, в сигнализаторах прикосновения к металлическим предметам или датчиках уровня жидкости, в бытовых приборах для включения подсветки и т.д.
Методы измерения емкости
Точность и надежность работы датчиков приближения зависит от точности измерения изменившейся емкости системы. Существует несколько методов измерения емкости, которые основаны на преобразовании изменения емкости в изменение напряжения, тока, частоты или ширины импульсов.
Прямой метод измерения подразумевает заряд конденсатора от источника тока в течение определенного времени и затем — измерение напряжения на конденсаторе. Этот метод требует наличия прецизионного источника очень маленького тока и входа с высоким импедансом для измерения напряжения.
Второй метод подразумевает ис-
пользование измеряемой емкости в качестве времязадающей величины в RC-генераторе с последующим измерением постоянной времени, частоты или периода. Этот метод прост, но обычно не обеспечивает высокой точности.
Ещё один подход заключается в измерении импеданса конденсатора на переменном токе. Источник синусоидального сигнала подключается к конденсатору, и при этом измеряется напряжение и ток через конденсатор. При использовании 4-проводного логометрического подключения (при котором измеряется соотношение импедансов) и синхронного демодулятора можно получить наиболее точный результат. В то же время такая схема очень сложна и состоит из большого количества элементов. Наиболее распространенными являются метод последовательного приближения и измерение с помощью сигма-дельта модулятора.
В методе последовательного приближения (см. рис. 3) коммутируемая емкостная цепь заряжает измерительный конденсатор CMod. Напряжение с CMod подается через ФНЧ на компаратор, где сравнивается с опорным. Синхронизируемый с генератором счетчик запирается выходным сигналом компаратора. Этот сигнал и обрабатывается для определения статуса датчика. Метод последовательного приближения требует очень малого числа внешних элементов. Кроме того, на работу схемы в данном случае не влияют переходные помехи по цепи питания.
Схема с использованием сигма-дельта преобразователя показана на рисунке 4. Коммутируемая схема находится между VDD и напряжением на CMod. Генератор псевдослучайных чисел управляет частотой переключения коммутируемой конденсаторной цепи. Конденсатор CMod совершает непрерывные циклы зарядки-разрядки. При закрытии компаратора замыкается переключатель разрядного сопротивления, и CMod разряжается до тех пор, пока новое значение не запишется в регистр-защелку. Затем выходной поток битов с защелки логически умножается на сигнал с ШИМ и запускает счетчик. Выходной сигнал счетчика обрабатывается для определения статуса датчика. Данный метод идеально подходит для кухонно-бытовой техники, промышленных и автомобильных приложений, поскольку минимально восприимчив к электромагнитным помехам и наводкам.
|
Рис. 3. Метод последовательного приближения |
|
Рис. 4. Измерение емкости с помощью сигма-дельта модулятора |
В сигма-дельта преобразователе происходит переключение конденсаторов фиксированной величины. За счет этого достигается уравнивание заряда между меняющимся сигналом на аналоговом входе и постоянным сигналом источника опорного напряжения. Однако заряд пропорционален напряжению и емкости, поэтому можно зафиксировать входное напряжение и вместо этого менять емкость. Фиксированное входное напряжение можно рассматривать как напряжение возбуждения. Конденсатор, емкость которого меняется, будем рассматривать как емкостный датчик. В результате выходной код будет соответствовать соотношению емкости датчика и опорной емкости CREF.
Данный подход позволяет осуществить прямое подключение емкостного датчика к сигма-дельта преобразователю, что само по себе обеспечивает такие преимущества как высокая разрешающая способность, точность и линейность. Кроме того, данная схема не чувствительна к величине емкости между выводами датчика и землей или к току утечки, если эти величины находятся в пределах, характерных для реальных конструкций. Преобразователь емкости в цифровой код может быть изготовлен на одном кристалле, что обеспечивает высокую степень интеграции, простоту, надежность, низкую стоимость и высокую повторяемость конечного устройства.
Чувствительный элемент
Для выбора чувствительного элемента большое значение имеет диапазон изменения емкости датчика. Путем подбора Rdis и Uопор регулируют динамический диапазон модулятора так, чтобы он стал максимальным. Оптимальное соотношение достигается тогда, когда выходное напряжение составляет 70–80% от максимального при отсутствии объектов вблизи датчика. Например, когда разрешение преобразователя равно 14, производится от 11500 до 13000 счетов.
Чувствительность датчика сильно зависит от геометрических размеров чувствительного элемента. Как правило, оптимальные размеры подбираются экспериментально. Если вблизи датчика располагаются металлические объекты, необходимо поставить защитный экран между датчиком и этими объектами, а также внести поправку при последующей обработке данных, иначе могут возникать ошибки. Защитить схему от воздействия внешних факторов, таких как изменение температуры и влажности, помогает БИХ-фильтр.
Пример
Пусть датчик приближения используется в схеме, которая при приближении руки зажигает светодиод. В качестве чувствительного элемента возьмем провод сечением 0,5 мм2 и длиной 10 см. Структурная схема устройства показана на рисунке 5. Основным элементом схемы является сигнальный процессор CY8C21434 Cypress Semiconductor. Разрешение сигма-дельта-преобразователя равно 14. Из внешних элементов требуется только CMod и Rdis. Показания датчика снимаются с вывода Debug по интерфейсу I2C.
|
Рис. 5. Структурная схема устройства |
Выходной сигнал АЦП проходит через БИХ-фильтр, чтобы задать опорное значение. В данной схеме фильтр позволяет избавиться от высокочастотных шумов. Для защиты от медленных изменений требуются дополнительные меры. Когда разность между текущим показанием и опорным превышает пороговое значение, регистрируется приближение объекта. Код на С для данного алгоритма приведен на рисунке 6.
|
Рис. 6. Пример реализации на С |
Несколько функций являются специфическими для данного процессора:
ReadCSD — считывание текущих показаний сигма-дельта преобразователя;
LowPassFilter — программный БИХ-фильтр;
LED_On и LED_Off — включение и выключение светодиода;
Debug_DumpData — пересылка показаний датчика на внешний отладочный вывод.
Для калибровки системы необходимо отрегулировать Rdis и установить текущее значение АЦП на уровне 80% от максимального, затем поднести руку к датчику на расстояние, в пределах которого будет вестись обнаружение. В качестве порогового значения следует взять 80% от значения, на которое изменятся показания. Значение Hysterisis подбирается так, чтобы внешние шумы и наводки не влияли на работу.
Литература
1. Raaja G. Basics and implementation of capacitive proximity sensing//www.eetimes.com.
2. Брихта М. Преобразователи емкости — код на основе сигма-дельта-модулятора//www.compitech.ru.
3. Ранджан В. Датчики бесконтактного распознавания//Электронные компоненты, №11, 2008.
Датчик приближения в телефоне Android
В этой статье я расскажу вам что такое датчик приближения в телефоне Андроид, как он работает, его особенности и как выполнить сброс и калибровку. Обо всем по порядку.
Данная статья подходит для всех брендов, выпускающих телефоны на Android 11/10/9/8: Samsung, HTC, Lenovo, LG, Sony, ZTE, Huawei, Meizu, Fly, Alcatel, Xiaomi, Nokia и прочие. Мы не несем ответственности за ваши действия.
Внимание! Вы можете задать свой вопрос специалисту в конце статьи.
Что такое датчик приближения в телефоне?
Датчик приближения в смартфоне представляет собой небольшую деталь, которая реагирует во время сближения гаджета с каким-либо объектом. При помощи данного датчика во время разговора по телефону автоматически гаснет его экран, когда устройство приближается к уху.
Данная функция очень полезна:
- Если при разговоре отключается экран, то это гарантирует, что вы не нажмете случайно на сенсорном дисплее какую-либо кнопку к примеру, ухом или щекой.
- Данный датчик позволяет экономить заряд телефона. Если бы во время разговора горел экран, то смартфон бы очень быстро разряжался, а это неудобно, особенно для любителей разговаривать часами.
На скриншоте ниже показано, где на Андроид устройстве находится датчик приближения.
Нужна помощь?Не знаешь как решить проблему в работе своего гаджета и нужен совет специалиста? На вопросы отвечает Алексей, мастер по ремонту смартфонов и планшетов в сервисном центре.Напиши мне »
Зачастую датчик движения располагается в верхней части телефона – рядом с фронтальной камерой. На некоторых девайсах окошко датчика хорошо видно, а на других невооруженным глазом оно не заметно.
Для определения места расположения на вашем телефоне данного датчика достаточно в режиме разговора его отодвинуть от уха и область возле камеры закрыть пальцем. Когда погаснет экран – вы нашли на устройстве датчик приближения.
Читайте На Android не выключается экран во время звонка
Особенности работы датчика приближения
По своей технологии датчики бывают нескольких типов, основные из которых следующие:
- Индуктивные.
- Емкостные.
Особенностью индуктивных датчиков стало реагирование только на металлические объекты, из-за чего в экранах телефонов они не применяются. Емкостные могут определить почти все объекты, у которых диэлектрическая проницаемость отличается от воздуха.
Здесь он вместе с объектом образует между собой своеобразный пространственный конденсатор с емкостью. Расстояние определяется через изменение емкости.
В таких датчиках длительность чувствительности невелика. Параметр зависит от размера приближения. Для сенсорных экранов смартфонов не требуется большая дальность – ему необходимо реагировать только во время разговора на приближение уха.
Как в телефоне включить датчик приближения?
В телефонах Андроид зачастую датчик включен автоматически. Если изначально он у вас не работает или его случайно отключили, то можно включить снова:
Подобным образом при необходимости можно отключить датчик.
Преимущества и недостатки технологии распознавания
Выделяют следующие преимущества датчика распознавания:
- Высокая степень чувствительности.
- Довольно большая область обнаружения.
- Относительная доступность в плане стоимости, т.к. производятся датчики из дешевых компонентов – пленки оксидов олова, меди, печатной краски, индия и внешнего проволочного датчика.
- Универсальность конструкции.
- Малый размер.
- Возможность функционирования с использованием разных не проводящих покрытий, например, стекол разной толщины.
- Температурная стабильность.
- Высокая надежность и долговечность.
Данный метод имеет определенные минусы:
- Чувствительный элемент должен быть проводящим, чтобы было обнаружено приближение. Например, он не сможет обнаружить руку в резиновой перчатке.
- Нахождение возле проводящего объекта можно стать причиной того, что система паразитную емкость будет пересчитывать так, чтобы учитывать изменение, вызванные этим объектом. Из-за этого часто появляются ложные срабатывания в будущем, но данную неприятность можно устранить путем калибровки датчика приближения.
- Метод емкостного распознавания функционирует так, что, когда металлические объекты находятся в диапазоне его работы, сам диапазон уменьшается.
Читайте Google Play Market не работает сегодня — причины и что делать
Настраиваем на телефоне датчик приближения
В функционировании датчика могут появиться некоторые неполадки. При приближении гаджета к уху он может не работать или включаться, когда далеко от смартфона находится какой-либо объект.
В этой ситуации нужно осуществить калибровку датчика приближения. Самый безопасный и простой способ – это использование бесплатного приложения «Датчик приближения Сброс», которое доступно в Плей Маркете.
После скачивания и инсталляции необходимо запустить софт и выполнить такие шаги:
- Нажимаем на «Calibrate Sensor».
- Закрываем рукой датчик и выбираем на экране «Next».
- Руку убираем и снова нажимаем на «Next».
- Теперь следует нажать на «Calibrate», затем на «Confirm»
- Программе предоставляем root-права (нажимаем «Разрешить»).
- Ожидаем, пока телефон перезагрузится.
- Проверяем работоспособность датчика приближения.
Если данные действия не решили проблему, то может потребоваться калибровка дисплея или даже перепрошивка девайса. Еще мог произойти аппаратный сбой, т.е. потребуется заменить сам датчик в гаджете, что сможет сделать специалист в сервисном центре.
АвторМастер Николай
Инженер по ремонту мобильной и компьютерной техники в специализированном сервисном центре, г. Москва. Непрерывный опыт работы с 2010 года.
Есть вопросы? Задавайте в комментариях к статье. Отвечать стараюсь максимально быстро вам на указанную почту. Каждый случай индивидуален и поэтому очень важно, чтобы вы максимально расписали свою проблему и какая у вас модель устройства.
Экран гаснет, когда закрываешь камеру. В чём дело
Вы хорошо знаете, как устроен ваш смартфон, хотя бы внешне? Думаю, что да. Дисплей, камеры, кнопки питания и регулировки громкости, зарядный разъём и какие-то технические сенсоры на фронтальной панели. Вот, собственно, и всё устройство большинства современных смартфонов. Другое дело, что смартфон – это в принципе штука довольно сложная, и нередко с ней могут происходить такие вещи, которых от неё совсем не ждёшь. Например, когда дисплей начинает отключаться сам по себе и не реагирует на прикосновения, если, скажем, перекрыть его камеру. Что это такое? Попробуем разобраться.
Экран смартфона выключается, если перекрыть камеру? Это норма
Почему только у iPhone и OnePlus есть такой крутой выключатель звука
Недавно у нас уже был большой материал, посвящённый всем чёрным датчикам, которые размещаются на корпусах наших смартфонов. Можете почитать, если интересно. Там подробно рассказывается о том, что это за датчики, как они работают и зачем вообще нужны.
Не закрывайте верхнюю часть экрана. Что значит
Смартфон думает, что он в кармане, и блокирует экран
Однако мы не разобрали один очень интересный сценарий, в котором один из этих датчиков может мешать правильной работе вашего смартфона, перекладывая вину за это на другой, совершенно безобидный компонент – фронтальную камеру.
Думаю, у вас не раз бывало такое, экран вашего смартфона блокировался, отказываясь реагировать на прикосновения, и выводил требование перестать перекрывать его верхнюю часть. Штука забавная. В конце концов, что это вообще за компоненты там находятся, которые не позволяют аппарату функционировать при перекрытии?
Почему я перестал пользоваться расширениями для Google Chrome
Не буду ходить вокруг, да около. Всё дело в датчике приближения, который отвечает за блокировку экрана при телефонных разговорах, а ни в какой не камере. Просто из-за того, что они располагаются рядом друг с другом, возникает ощущение, что, перекрывая камеру, вы провоцируете блокировку экрана, но это неправда. То есть опасаться, что за вами следят и не позволяют пользоваться смартфоном, если возможностей для слежки нет, — более чем глупо.
Но одно дело, если верхнюю часть перекрываете вы сами, говоря по телефону, и совершенно другое, когда это происходит при выполнении других задач или, хуже того, если смартфон сам начал блокировать экран. Скорее всего, это происходит в темноте и не позволяет вам разблокировать аппарат. Отсутствие света заставляет его думать, что он находится в кармане или сумке, и препятствовать случайной разблокировке или запуску тех или иных функций с экрана блокировки.
Экран не реагирует на нажатия. Что делать
Датчик освещённости может быть не быть расположен рядом с камерой — он всё равно отреагирует на перекрытие
Несмотря на то что смартфон не сможет разблокироваться сам, есть как минимум три действия, которые он может совершить в заблокированном состоянии:
- Активировать камеру и наделать фотографий;
- Переключаться между разными профилями пользователей;
- Позвонить в экстренную службу.
Почему не стоит гнаться за дисплеями с частотой 120 Гц
Опционально встречаются варианты экстренного очищения памяти, вызова избранных контактов в случае опасности или вызова голосового ассистента, который может натворить ещё больше дел. Поэтому нет ничего удивительного в том, что смартфон блокирует прикосновения к экрану – таким образом он защищает вас от нежелательных последствий.
Если вы сами не перекрываете датчик освещённости, но смартфон всё равно жалуется на это, попробуйте одновременно зажать кнопку питания и увеличения громкости. Как правило, эта комбинация приводит датчик в чувство и даёт ему понять, что все манипуляции производит лично пользователь, и он перестаёт блокировать прикосновения к экрану. Если это не помогает, проверьте датчики на предмет загрязнения. Если что-то такое есть, протрите датчики. А если всё в норме, попробуйте перезагрузить аппарат.
Не совсем обычная «кнопка». ИК датчик приближения.
Когда я начал писать этот обзор, то даже не знал к какой категории отнести данный товар.Попробовать данное устройство (да, кнопка так же может быть устройством) хотел давно, получилось только сейчас, о чем и хочу поделиться.
Продолжение как всегда под катом.
К большому сожалению применения пока не будет, так как пришла она ко мне позже, чем планировалось (причина не в скорости доставки, а в некоторых других причинах) и пришлось применить гораздо более дорогое решение.
Существуют разные выключатели и переключатели.
Есть обычные, которые стоят у всех дома. Чтобы их включить или переключить, на них надо нажать.
Есть с датчиком прикосновения, на них не надо нажимать, а достаточно только прикоснуться.
А есть бесконтактные, но не в плане отсутствия контактов (хотя одно не мешает другому), а в отсутствии необходимости даже прикасаться к выключателю, достаточно только поднести к нему руку.
Вот о последнем типе таких устройств и пойдет дальше речь.
Начну пожалуй как всегда с описания и фото того, что получил, а уже в процессе расскажу что это, зачем и какие бывают примерные аналоги данного устройства.
Пришла она в аккуратной коробочке, сам выключатель (или вернее переключатель) был в прозрачном пакетике, но перед фото я его снял.
Внутри пакетика находилось.
Собственно переключатель.
Комплект крепежа, две пластиковые пробки и два шурупа.
Инструкция на английском языке, хотя к этому устройству она особо и не нужна, так как оно не имеет каких либо органов подстройки, а выходы подписаны сзади самого устройства.
Непонятная мне бумажечка.
Инструкция, а вдруг кому нибудь пригодится 🙂
Сама кнопка выполнена весьма качественно, металл крепкий, хоть и тонкий, очень похож на нержавейку, пластиковые части подогнаны хорошо.
Да и на вид довольно симпатичная, раздражает только надпись Exit, дальше напишу почему.
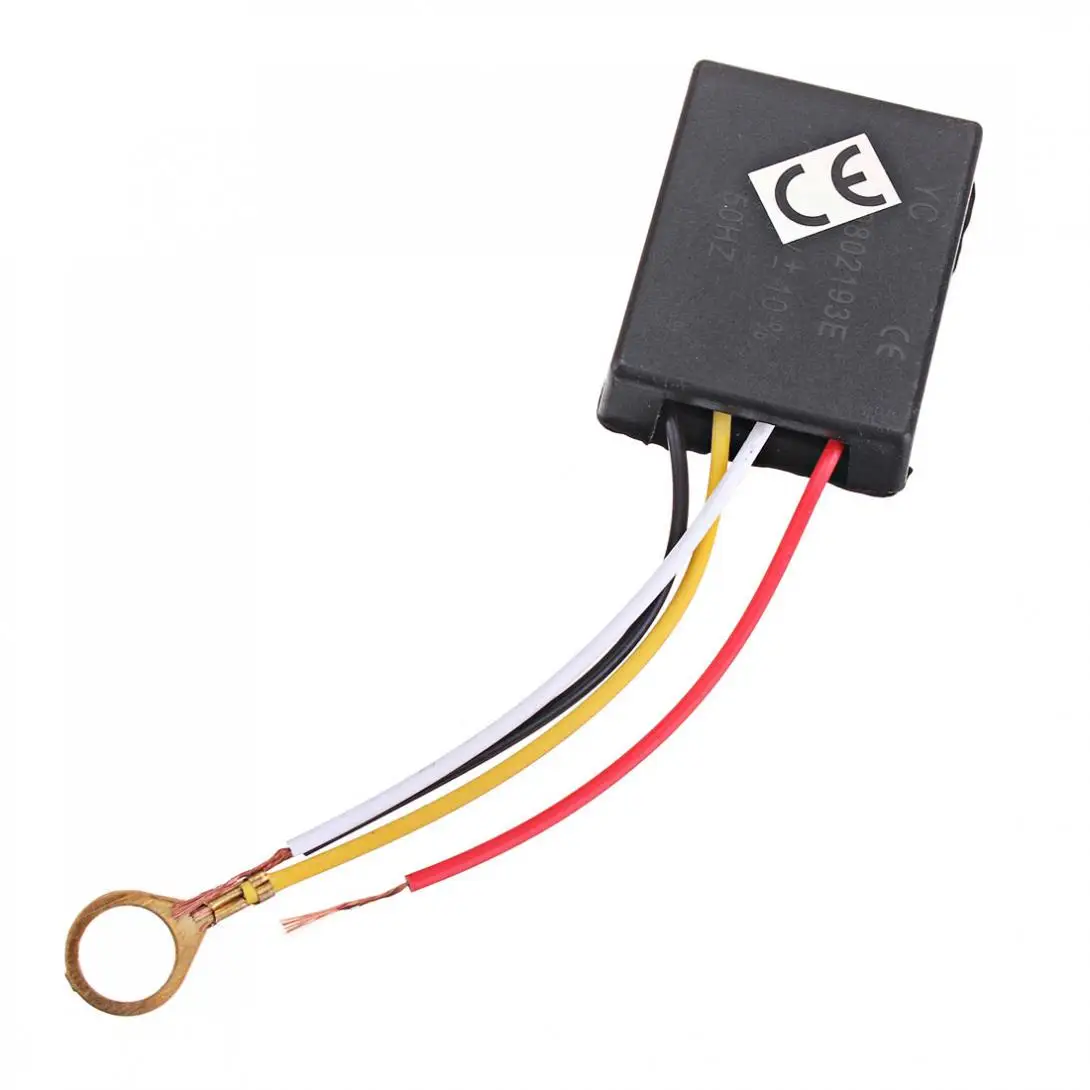
Сзади присутствуют 5 проводов.
Красный и черный соответственно плюс и минус питания, все соответствует общепринятой маркировке (бывают и исключения).
Желтый — общий контакт реле
Зеленый — нормально разомкнутый контакт
Белый — нормально замкнутый контакт.
Провода не сильно длинные, около 15см.
Вот мы постепенно и добрались до внутренностей.
Плата в устройстве двухсторонняя, сзади так же подписано назначение проводов, что очень приятно, так как бумажка, наклеенная сзади, вполне может оторваться, быть испорченной и т.п.
Задняя крышка не герметична, но подогнана вполне нормально, но отверстие для выхода проводов сделано с запасом, потому класс защиты указан только для передней панели.
По логике дальше должна быть фотография внутренностей. Она и будет, но сначала я сделаю небольшое лирическое отступление.
Для начала, какие бывают бесконтактные выключатели.
1. Ёмкостные, требуют прикосновения, либо поднесения руки на очень близкое расстояние. Наверное самое простое и дешевое решение. У меня был обзор с участием такого датчика.
2. Радиочастотные, работающие по принципу Доплера. Самые дорогие датчики.
3. Датчики, основанные на отражении ИК излучения. Простой и недорогой, но компромиссный вариант.
А теперь достоинства и недостатки.
Ёмкостные, относительно недороги, но желательно прикосновение к поверхности, могу некорректно работать в случае электромагнитных помех.
Радиочастотные, работают на очень высокой частоте, порядка 24ГГц. Сложные и соответственно дорогие, но меньше боятся помех, не боятся загрязнения поверхности, могут работать через непрозрачный пластик.
Инфракрасные, простая конструкция, дальность соизмеримая с радиочастотными, но может снизится если поверхность имеет сильные загрязнения и не работают через непрозрачные в ИК диапазоне материалы.
А теперь я попробую объяснить, почему я использую такие выключатели.
Помимо написания обзоров, паяния плат я занимаюсь установкой автоматических раздвижных дверей. и данные двери не всегда имеют в своем составе датчик движения.
А так как я устанавливаю такие двери и на предприятиях, то там действуют санитарные нормы, по которым желательно (а иногда обязательно, например в операционных и туалетах) применение активаторов открывания двери с бесконтактным управлением (есть даже специальные устройства, куда надо вставлять ногу, что ббы сработал контакт).
До недавнего времени я применял датчики Бельгийской фирмы Bea. Например такой
Стоимость одного такого датчика составляет (если ничего не путаю) около 130 долларов.
А часто надо два датчика на одну дверь.
Необходимо отметить, что данные датчики не антивандальные, обозреваемый исполнен более крепко, но антивандальным так же не считается.
Вот я плавно дошел до того, что бы показать как ИК датчик устроен внутри.
Сначала покажу само место, куда ставится плата, хорошо видно отверстия для передачи и приема ИК излучения, они сделаны так, что бы ИК приемник видел только отраженное излучение.
Плата сама по себе работать не будет.
Кстати, не помешала бы уплотнительная резинка по периметру металла, но в дорогом радиочастотном ее так же нет.
А теперь сама печатная плата устройства.
На ней видно —
ИК светодиод.
ИК фотоприемник, такие обычно применяются в различной радиоаппаратуре имеющей дистанционное управление, частота работы 38 КГц (измеренная).
Реле, его параметры соответствуют параметрам, указанным в инструкции.
Разъем для подключения проводов.
Вход по питанию имеет защиту в виде самовосстанавливающегося предохранителя и диода, защищающего от подключения питания неправильной полярности. дальше стоит стабилизатор питания на 5 Вольт, электролитические конденсаторы отсутствуют, что только повышает надежность.
Четыре двухцветных светодиода. Светят красным в обычном режиме и синим при срабатывании.
Микросхема управления, маленькая, 6 ног, в корпусе SOT23.
Для управления применена микросхема на которой написано 02En, я нашел в интернете описание, но не уверен, что это она, так как страница на китайском и похожа на страницу какой то непонятной торговой площадки или форума.
Она не просто постоянно генерит импульсы для управления светодиодом, а формирует некие последовательности пачек импульсов, на нее соответственно заведен фотоприемник.
Вследствие этого распознавание препятствия довольно корректное, на ИК пульт она не реагирует, как и на сильную засветку лампой накаливания (но это заслуга фотоприемника).
Естественно я измерил токи потребления в дежурном режиме и рабочем.
В режиме ожидания потребляет 27мА. Питание 12 Вольт.
В активном режиме немного больше, 38мА, так как включено реле.
В дежурном режиме подсветка имеет красный цвет, немного неравномерно, но может так и задумано.
В активном режиме подсветка синяя, но так как применен матовый светорассеиватель, то она не сильно напрягает.
Дальность срабатывания около 8см от руки и около 15см от листа белой бумаги.
Срабатывает очень четко даже на относительно быстрое движение рукой, после срабатывания находится около двух секунд в активном режиме, после этого переходит в режим ожидания.
На относительно тонкие предметы не срабатывает.
Конструкция довольно тонкая, большая часть утоплена, так как рассчитана на врезку в стену\панель.
На всякий случай я измерил основные размеры, вдруг кому нибудь пригодится.
Как я выше писал, питание составляет 12 Вольт, что намекает на то, что устройство предназначено для применения в охранных системах, да и надпись Exit говорит так же об этом.
Системы для промышленной автоматики имеют стандартное питание в 24 Вольта, причем могут работать и от постоянного тока и от переменного.
Думаю, что при несложной доработке можно вполне применять кнопку и с системами промышленной автоматики.
Кнопка могла бы быть очень удобна в различных сферах применения, но напрягает надпись, на мой взгляд можно было бы предлагать либо разные варианты надписи, либо давать в комплекте наклейки с различными надписями.
Сфера применения —
Устройства контроля доступа.
Управление открыванием дверей в помещениях, где необходимо дать команду на открывание без прикосновения, продуктовые предприятия, операционные, чистые комнаты, туалеты и т.п.
Просто места, где такое управление может быть удобным, например на кухне (с соответствующей декоративной доработкой) для включения освещения.
Вообще когда я писал этот обзор, то у меня было чувство легкого дежавю, похожие впечатления от устройства я описывал в обзоре считывателя. В частности очень понравилось качество изготовления и довольно продуманная и надежная на вид схемотехника.
В интернете я встречал как минимум два варианта для самодельной реализации подобного устройства, один на микросхеме LM567CN, а так же на микроконтроллере. Последний вариант я собирал и он успешно у меня используется, если интересно, могу как нибудь сделать обзор.
Резюме.
Плюсы.
Цена.
Хороший внешний вид.
Качественное изготовление и довольно продуманная конструкция.
Минусы.
Хотелось бы уплотнительную резинку по периметру, для герметизации.
Так как устройство может быть применено не только как кнопка выхода, то хотелось бы иметь варианты изменения надписи.
Мое мнение. Вполне достойная и простая замена для радиочастотных бесконтактных выключателей, к тому же не создающая радиочастотного излучения.
Данный товар был бесплатно предоставлен, для обзора и тестирования, магазином eachbuyer.
Думаю, что обзор данного устройства может быть полезен. Жду вопросов и комментариев.
Если что-то забыл упомянуть, пишите, добавлю.
P.S. Путем добавления копеечной микросхемы (и возможно одного резистора и конденсатора) можно переделать устройство в бистабильное, т.е. поднесли руку, включили, поднесли еще раз, выключили. Стоимость переделки около 20 центов, микросхема HEF4013BP.
Сейчас устройство работает как аналог не фиксируемой кнопки (как кнопка выхода в домофонах, хотя этот датчик и сделан для такого применения).
Возможно еще будет обзор с похожей доработкой :).
(PDF) сенсорные датчики для гуманоида руки
0 5 10 15 20
0
20
40
20
60
40
60
80
120
80
120
1402 120
140
Должность (мм)
Размер датчика (условные единицы)
Таксель 1
Таксель 2
Таксель 3
Таксель 4
Таксель 5
Рис. 13. Пространственное разрешение ладони. Зонд (диаметр 3 мм)
нажимает на ладонь в разных положениях (0.2 мм друг от друга),
по прямой линии, как видно на рис. 4, начиная с правой стороны ладони
. Для каждого положения датчик перемещается вверх и вниз 15 раз. Мы показываем
среднее значение измерения и стандартное отклонение для 5 различных такселей.
VII. ВЫВОДЫ И БУДУЩИЕ РАБОТЫ
A. Выводы
Мы представили роботизированную руку с емкостной системой датчиков давления
. При разработке датчика особое внимание
было уделено интеграции в робот.Также важным фактором дизайна была легкость
и скорость производства.
Кончики пальцев и ладонь включают в себя печатную плату с электроникой
для выполнения оцифровки: это уменьшает
количество проводов, необходимых для соединения кончика пальца и ладони
. Кроме того, кончик пальца имеет форму, аналогичную кончику пальца человека
, имеет небольшие размеры, обеспечивает 12 измерений давления
и полностью соответствует требованиям. Ладонь основана на модульной системе
, которую можно использовать и для других частей робота
.Наши результаты показывают, что датчик можно использовать для определения того, где и (хотя и в меньшей степени) какое давление прикладывается к датчику.
B. Будущие работы
Мы хотели бы дополнительно протестировать датчик, особенно его
износостойкость, переходную реакцию, минимальное измеряемое давление,
и реакцию на зонды различного диаметра и формы.
Также необходимо доказать его способность помогать захватывать и манипулировать объектами.Мы планируем протестировать различные диэлектрики, чтобы
уменьшить гистерезис и сделать датчик более чувствительным.
По той же линии гибкая печатная плата может быть также обернута
вокруг внутренней опоры из силикона, что увеличивает
податливость кончика пальца. Количество такселей может быть увеличено с 12 до 24 за счет использования PGA версии
чипа AD7147 и уменьшения размера такселей.
Кроме того, было бы полезно включить другие модальности датчика
в кончик пальца.Поскольку общий принцип, описанный
в этой статье, легко применим к другим формам, емкостные
сенсорные системы могут быть также включены в другие фаланги
пальцев гуманоидного робота iCub.
ССЫЛКИ
[1] H. Nicholls и M. Lee, «Тактильное восприятие для мехатроники — состояние
художественного обзора», Mechatronics, vol. 9, 1999
[2] Р.С. Дахия, Г. Метта, М. Валле и Г. Сандини, «Тактильное восприятие:
от людей к гуманоидам», IEEE Transactions on Robotics, vol.
26, вып. 1, 2010
[3] П. Дарио, К. Ласки, А. Менчиасси, Э. Гульельмелли, М. С. Карроцца,
М. Зекка, Л. Золло, Г. Тети, Л. Беккаи, Ф. Векки, С. Roccella
«Человекоподобная роботизированная система манипулирования, реализующая человеческие
модели сенсомоторной координации», в Proc. 3-я IEEE-РАН междунар.
Конф. on Humanoid Robots, 2003
[4] H. Liu, P. Meusel, N. Seitz, B. Willberg, G. Hirzinger, MH Jin, YW
Liu, R. Wei and Z.В. Се, «Модульная мультисенсорная рука DLR-HIT-
», Механизм и теория машин, том. 42, нет. 5, pp 612-625,
2007
[5] T. Mouri, H. Kawasaki, K. Yoshikawa, J. Takai and S. Ito, «Anthro-
pomorphic Robot Hand: Gifu Hand III», in проц. Междунар. конф. ICCAS,
, стр. 1288-1293, 2002
[6] G. Cannata и M. Maggiali, «Встроенный датчик прикосновения и силы
для роботизированных манипуляций и захватов», в Proc. Гуманоиды 2005,
2005.
[7] Л. Натале и Э. Торрес-Хара, «Чувствительный подход к схватыванию», в
Proc. 6-й междунар. конф. на Epigenetic Robotics, 2006
[8] Shadow Hand Company, Shadow ловкая рука (2008) [онлайн].
Доступно: http://www.shadowrobot.com/hand/
[9] С. Миядзаки и А. Исида, «Емкостный преобразователь для непрерывного измерения
вертикальной силы стопы», Мед. биол. англ. Вычисл., вып.
22, стр. 309316, 1984
[10] З. Чу, П.М. Сарро и С. Миддельхук, «Кремниевый трехосевой тактильный датчик
», Sens. Actuators A, vol. 54, pp. 505-510, 1996
[11] Б. Л. Грей и Р. С. Фиринг, «Поверхностная микротактильная сенсорная матрица
», в Proc. Междунар. конф. on Robotic Automation, 1996,
,. Междунар. конф. Solid-State Sens.
Актуаторы, преобразователи, стр. 1473-1476, 1997
[13] J.Ульмен и М. Каткоски, «Надежная, недорогая и малошумная искусственная оболочка для роботов, удобных для человека», в Международной конференции IEEE/RSJ
по интеллектуальным роботам и системам, 2010.
[ 14] П. А. Шмидт, Э. Маэль и Р. П. Вуртц, «Датчик для динамической тактильной информации
с приложениями для взаимодействия человека и робота и исследования объекта
», Робот. Автономная система, том. 54, стр. 1005-1014, 2006
[15] Apple Inc., iPod Touch Technology (2009).[Онлайн]. Доступно:
http://www.apple.com/ipodtouch/features/technology.html
[16] Analog Devices Inc., Программируемый контроллер CapTouch для датчиков емкости с одним электродом
— AD7147 (2007 г.). [Онлайн]. Доступно:
http://www.analog.com/static/imported-files/Data Sheets/AD7147.pdf
[17] Pressure Profile Systems Inc., PPS-Products (2007). [Онлайн]. Доступно:
: http://www.pressureprofile.com/products.php
[18] H.Ивата, «Дизайн человеко-симбиотического робота TWENDY-ONE», в
Proc. ICRA 2010, 2010.
[19] А. Шмитц, М. Маджиали, Л. Натале, Б. Бонино и Г. Метта, «Тактильный датчик
для кончиков пальцев гуманоидного робота iCub», в In
Международная конференция IEEE/RSJ по интеллектуальным роботам и системам,
2010.
[20] M. Maggiali, G. Cannata, P. Maiolino, G. Metta, M. Randazzo и
G. Sandini, «Embedded tactile сенсорные модули», представленная на 11-й выставке
«Мехатрон».Форум Биеннале Int. Conf., 2008
[21] G. Cannata, R. S. Dahiya, M. Maggiali, F. Mastrogiovanni, G. Metta
и M. Valle, «Modular Skin for Humanoid Robot Systems», in 4th
Int. конф. on Cognitive Systems, 2010
[22] Г. Метта, Д. Вернон, Л. Натале, Ф. Нори и Г. Сандини, «Гуманоидный робот
iCub: открытая платформа для исследований в области воплощенного
познания», на семинаре IEEE по показателям производительности для интеллектуальных систем
Workshop, 2008
Stanford дает роботизированным рукам ощущение человеческого прикосновения
Этот датчик позволяет роботу держать чернику, не раздавливая ее.(Источник: предоставлено лабораторией Бао)
Инженеры Стэнфордского университета разработали электронную перчатку, содержащую датчики, которые однажды смогут дать роботизированным рукам ту ловкость, которую люди считают само собой разумеющейся.
В статье, опубликованной 21 ноября в журнале Science Robotics , инженер-химик Женан Бао и ее команда продемонстрировали, что датчики работают достаточно хорошо, чтобы роботизированная рука могла касаться нежной ягоды и обращаться с шариком для пинг-понга, не раздавливая их.
«Эта технология открывает нам путь к тому, чтобы в один прекрасный день дать роботам такие же сенсорные возможности, как и у человеческой кожи», — сказал Бао.
Обязательно к прочтению: JackRabbot 2 изучает социально ориентированную автономную навигацию
Бао сказал, что датчики на кончиках пальцев перчатки одновременно измеряют интенсивность и направление давления — два качества, необходимые для достижения ловкости рук. Исследователям еще предстоит усовершенствовать технологию автоматического управления этими датчиками, но когда они это сделают, робот, одетый в перчатку, сможет удерживать яйцо между большим и указательным пальцами, не разбивая его и не позволяя ему соскользнуть.
Электронная перчатка, имитирующая жизнь
Электронная перчатка имитирует взаимодействие слоев человеческой кожи, придавая нашим рукам необычайную чувствительность.
Наш внешний слой кожи пронизан датчиками для обнаружения давления, тепла и других раздражителей. Наши пальцы и ладони особенно богаты сенсорными датчиками. Эти датчики работают в сочетании с подслоем кожи, называемым шиповидным, неровной микроскопической территорией холмов и долин.
Эта тряска критична.Когда наш палец касается объекта, внешний слой кожи смещается ближе к остистой оболочке. Легкое прикосновение ощущается главным образом датчиками, расположенными близко к вершинам холмов. Более сильное давление сдавливает внешнюю кожу в долины остистого хряща, вызывая более интенсивные тактильные ощущения.
Но измерение интенсивности давления — это только часть того, что позволяет шиповидное тело. Этот бугристый подслой также помогает выявить направление давления или поперечной силы. Палец, нажимающий на север, например, создает сильные сигналы на южных склонах этих микроскопических холмов.Эта способность ощущать силу сдвига — часть того, что помогает нам мягко, но крепко удерживать яйцо между большим и указательным пальцами.
Постдокторант Клементин Бутри и магистрант Марк Негре руководили разработкой электронных датчиков, которые имитируют этот человеческий механизм. Каждый датчик на кончике пальца роботизированной перчатки состоит из трех гибких слоев, которые работают согласованно. Верхний и нижний слои электрически активны. Исследователи разместили сетку электрических линий на каждой из двух обращенных поверхностей, как ряды в поле, и повернули эти ряды перпендикулярно друг другу, чтобы создать плотный массив маленьких сенсорных пикселей.Они также сделали нижний слой бугристым, как шиповатый.
Резиновый изолятор посередине просто разделял верхний и нижний слои электродов. Но это разделение было критически важным, потому что электроды, которые находятся рядом, но не касаются друг друга, могут накапливать электрическую энергию. По мере того как роботизированный палец нажимал вниз, сжимая верхние электроды ближе к нижним, накопленная энергия увеличивалась. Холмы и долины нижнего слоя давали возможность отображать интенсивность и направление давления в определенных точках на перпендикулярных сетках, очень похожих на человеческую кожу.
Нежное прикосновение
Чтобы протестировать свою технологию, исследователи поместили свои трехслойные датчики на пальцы резиновой перчатки и надели эту перчатку на руку робота. В конечном итоге цель состоит в том, чтобы встроить датчики непосредственно в кожное покрытие для роботизированных рук. В одном из экспериментов они запрограммировали роботизированную руку в перчатке так, чтобы она аккуратно касалась ягоды, не повреждая ее. Они также запрограммировали руку в перчатке, чтобы поднимать и перемещать мяч для пинг-понга, не раздавливая его, используя датчик для определения соответствующей силы сдвига, чтобы схватить мяч, не уронив его.
Бао сказал, что при правильном программировании роботизированная рука, надетая на текущую сенсорную перчатку, может выполнять повторяющиеся задачи, такие как снятие яиц с конвейерной ленты и размещение их в картонных коробках. Эта технология также может найти применение в роботизированной хирургии, где важно точное сенсорное управление. Но конечной целью Бао является разработка усовершенствованной версии перчатки, которая автоматически прикладывает необходимое усилие для безопасного обращения с объектом без предварительного программирования.
«Мы можем запрограммировать роботизированную руку так, чтобы она касалась малины, не раздавливая ее, но мы далеки от того, чтобы коснуться и определить, что это малина, и позволить роботу поднять ее», — сказала она.
Примечание редактора: Эта статья была переиздана Стэнфордским университетом.
«Кожа», наполненная датчиками, может дать протезам рук лучшее осязание
«Электронная кожа», вдохновленная нервной системой, может ощущать температуру, давление или влажность.Его можно использовать, чтобы придать протезам более сложное осязание.
Люди удивительны: Ваше тело представляет собой сенсорную машину благодаря примерно 45 милям нервов внутри вашего тела, которые соединяют вашу кожу, мозг и мышцы. Команда из Университета Сингапура использовала эту нервную систему в качестве вдохновения для создания «кожи» для роботов, которая однажды могла бы улучшить их способность обнаруживать и понимать окружающую среду.
Как это работает: Листы кремния были покрыты 240 датчиками, которые могут улавливать контакт, давление, температуру и влажность.По словам Бенджамина Ти, соавтора исследования, которое сегодня было опубликовано в журнале Science Robotics, они могут одновременно передавать все эти данные на один декодер и должны по-прежнему работать, когда система масштабируется до 10 000 датчиков.
Что нового: Гибкая роботизированная «кожа» была протестирована в предыдущих исследованиях, но эта система является первой, которая позволяет множеству датчиков передавать данные на один приемник, что позволяет ему действовать как единая система, а не как набор отдельные электроды, сказал Ти.Важно отметить, что он по-прежнему работает, даже если отдельные рецепторы повреждены, что делает его более устойчивым, чем предыдущие версии.
Что это может дать: По сути, это дало бы роботам что-то похожее на человеческое осязание, говорит Шан Луо, доцент кафедры робототехники Ливерпульского университета. Он добавил, что робот, оснащенный электронной кожей, сможет более ловко манипулировать инструментами на складе и более безопасно взаимодействовать с людьми. В настоящее время команда работает с инженерами и нейробиологами, чтобы помочь восстановить осязание протезов рук.Это может «позволить людям меньше переживать потерю», — говорит Ти.
Общая картина: Ловкость роботов была выбрана в качестве одной из 10 прорывных технологий Tech Review в этом году из-за растущей потребности в улучшении того, как роботы ориентируются в физическом мире, особенно если мы собираемся работать вместе с машинами. , или пусть помогают нам по хозяйству.
Подпишитесь здесь на нашу ежедневную рассылку The Download, чтобы получать дозу последних обязательных к прочтению новостей из мира новых технологий.
Нелегко дать роботу осязание
У нас есть роботы, которые могут ходить, видеть, говорить и слышать, а также манипулировать объектами в своих роботизированных руках. Есть даже робот, который может чувствовать запах.
А как же осязание? Это легче сказать, чем сделать, и некоторые из рассматриваемых текущих методов имеют ограничения, но мы разрабатываем новую технику, которая может решить некоторые из этих проблем.
Для людей осязание играет жизненно важную роль, когда мы двигаемся.Осязание в сочетании со зрением имеет решающее значение для таких задач, как поднятие предметов — твердых или мягких, легких или тяжелых, теплых или холодных — без их повреждения.
В области роботизированных манипуляций, когда рука или захват робота должны поднимать объект, добавление осязания может устранить неопределенность при работе с мягкими, хрупкими и деформируемыми объектами.
В поисках умной кожи
Количественная оценка прикосновения с инженерной точки зрения требует не только точного знания величины внешней силы, приложенной к сенсорному датчику, но также необходимо знать точное положение силы, ее угол и то, как он будет взаимодействовать с объектом, которым манипулируют.
Тогда возникает вопрос, сколько таких датчиков потребуется роботу. Разработка кожи робота, которая может содержать сотни или даже тысячи сенсорных датчиков, является сложной инженерной задачей.
Понимание физических механизмов сенсорного восприятия в биологическом мире обеспечивает понимание, когда дело доходит до разработки эквивалента робота – умной кожи.
Но существенным препятствием для развития умной кожи является необходимая электроника.
Повседневное измерение силы и прикосновения
Осязание обычно измеряется датчиком, который может преобразовывать давление в слабый электрический сигнал. Когда вы используете цифровые весы, чтобы взвешиваться или отмерять ингредиенты на кухне, весы, вероятно, используют пьезоэлектрический преобразователь.
Это устройство, которое превращает силу в электричество. Крошечный электрический ток от преобразователя затем проходит по проводам к небольшому микрочипу, который считывает силу тока, преобразует его в значимое измерение веса и отображает его на экране.
Несмотря на способность воспринимать различные уровни силы, эти электронные устройства имеют ряд ограничений, которые делают их непрактичными для умной кожи. В частности, они имеют относительно медленное время отклика на силу.
Существуют и другие типы сенсорных датчиков, в основе которых лежит материал, изменяющий другие свои электрические характеристики, такие как емкость или сопротивление. Эта технология может быть встроена в экран вашего мобильного телефона, и если вы используете трекпад на своем компьютере, он, безусловно, будет использовать сенсорные датчики.
Мягкие и гибкие датчики силы
В последние годы достигнут большой прогресс в создании сенсорных датчиков, которые можно встраивать в мягкие и гибкие материалы. Это именно то, что нужно для умной кожи.
Но многие из этих разработок полностью выходят из строя (из-за сенсорного типа) при наличии влаги. (Вы когда-нибудь пробовали коснуться мокрым пальцем сенсорного экрана своего смартфона?)
Медицинские приложения в настоящее время являются основной движущей силой спроса на гибкие и надежные датчики силы.Например, умную кожу можно использовать для восстановления сенсорной обратной связи у пациентов с повреждением кожи или периферической невропатией (онемение или покалывание). Его также можно использовать, чтобы дать протезам рук базовую способность сенсорного восприятия.
Недавно исследователи из Массачусетского технологического института и Гарварда разработали масштабируемую тактильную перчатку и объединили ее с искусственным интеллектом. Датчики, равномерно распределенные по руке, можно использовать для идентификации отдельных объектов, оценки их веса и изучения типичных тактильных паттернов, возникающих при их захвате.
Исследователи создали перчатку с 548 датчиками, собранными на трикотажном полотне, содержащем пьезорезистивную пленку (которая также реагирует на давление или растяжение), соединенных сетью токопроводящих нитей-электродов.
Это первая успешная попытка регистрации таких сигналов в больших масштабах, раскрывающая важные идеи, которые можно использовать в будущем при разработке протезов и инструментов для захвата роботов.
Но, как и почти все другие сенсорные интерфейсы, разработанные с использованием емкостных, резистивных или пьезоэлектрических технологий, эта тактильная технология плохо работает с мокрыми пальцами или под водой.
Определение оптической силы на горизонте
Чтобы решить эту проблему, мы разработали новую форму тактильного датчика, в котором используются нанометровые пленки органических светодиодов (OLED) и органических фотодиодов (OPD) для измерения мягкого прикосновения.
Технология OLED обычно используется в экранах телевизоров и смартфонов. Наш подход к измерению осязания основан на измерении оптической силы.
Элементы OLED (называемые диодами или пикселями) полностью обратимы.Это означает, что эти пиксели могут не только излучать свет (как на экране телевизора), но и обнаруживать свет.
Используя этот принцип, мы можем изготовить крошечный, непрозрачный, гибкий купол с отражающим покрытием, который размещается над несколькими пикселями OLED. Свет, излучаемый центральным пикселем, равномерно распределяется по всем остальным пикселям под куполом, если купол не нарушен.
Но если на купол нажать, коснувшись чего-либо, он деформируется, что приведет к неодинаковому отклику пикселей, используемых для обнаружения отраженного света.Комбинируя отклики десятков этих куполов в зоне контакта, можно будет оценить приложенную силу.
Этот подход является важным шагом на пути к упрощению компоновки смарт-скинов для приложений на больших площадях, и мы надеемся, что вскоре мы увидим роботов, которые смогут полностью ощущать тело в воздухе, во влажном состоянии или даже под водой.
Эта статья была впервые опубликована на The Conversation.
Емкостный сенсорный экран с микро: бит | ukBaz Notes
Не могу точно определить момент, когда мне стало любопытно включить «Домашние» емкостные сенсорные датчики в одном из моих проектов.я подозреваю это было скоплением вещей.
Был случай, когда студент на одном из моих семинаров был очарован емкостной датчик «кнопка», который мы использовали. Они хотели понять, как это срабатывал до того, как их палец фактически коснулся его. Это привело к большому обсуждение электрических полей и емкости.
Я регулярно прохожу мимо плаката с музыкальными технологиями, имеет графику, которая выглядит как кнопка «воспроизведение». Я продолжаю думать, что плакат нужно обновить, чтобы люди могли нажать кнопку воспроизведения и музыку бывает.
Я регулярно читаю о проектах команды на Голый проводящий с окрашенными датчиками. Это приводит к тому, что я задаю много вопросов о трафаретная печать моей невестке.
Очевидно, эта идея вынашивалась некоторое время, и в начале этого года я заказал несколько Голая проводящая краска а также медная лента от Pimoroni, чтобы вывести идею на новый уровень.
Последним кусочком головоломки стала отличная статья из О цепях. объясняя, как можно сделать емкостные сенсорные датчики с помощью одного контакта на современный микроконтроллер.
Емкостные датчики касанияне новы. я видел разные варианты там для производителей, которые делают свою работу действительно хорошо, так почему бы мне не выбрать один из их?
Короткий ответ — форм-фактор. Если бы я собирался обновить этот постер, мне нужно было то, что можно было бы спрятать за рамкой постера. Это ограничение сформировалась идея, что датчик будет маленьким и с батарейным питанием общение с чем-то большим, что воспроизводило звук.
Это привело к решению поэкспериментировать с micro:bit, чтобы посмотреть, сможет ли он емкостное сенсорное восприятие.
По умолчанию micro:bit поддерживает касание, но скорее резистивное касание. чем емкостный сенсорный. Это описано в документация во время выполнения как «Некоторые контакты также могут выполнять базовое распознавание касания посредством обнаружения сопротивления».
Резистивное касание не подходит для идеи обновления плаката, так как вам нужно физически коснитесь датчика и подключитесь к контакту GND микробита. Вот почему емкостное восприятие так хорошо. Датчик мог быть за плакатом но он все равно чувствовал бы руку через плакат.Также не требуется пользователь должен держать провод GND.
Основной функцией кода является переключение вывода (P1) между являющийся цифровым выходом (с высоким значением) и аналоговым входом. Емкость, введенная присутствием руки, приведет к тому, что считанное значение быть выше.
Нам нужно откалибровать наш датчик. Мы делаем это, считывая показания, когда нет руки. присутствует на датчике. Мы считываем значение с датчика несколько раз и усредняем значение до получить более стабильное значение
Это очень похоже на шаг калибровки, за исключением того, что мы сравниваем значение, которое мы получаем от датчика к значению от эталонного значения, когда рука не присутствовала.Если чтение выше, чем мы можем предположить наличие руки.
Чтобы сделать показания более надежными, мы добавляем запас к эталонному значению.
Как вы видели на видео вверху страницы, было положено многообещающее начало и кода кажется достаточно, чтобы обнаружить руку, которая вот-вот коснется датчика. Показания датчика показали хорошие значения, которые явно превысили пороговое значение. значение, которое было установлено. Значение Y на графике — это значение микробитового АЦП, которое представляет около 225 мВ пик-к-пик.
Когда я провел тот же эксперимент с micro:bit на батареях, значения были не такими большими. На самом деле они были крошечный, выходящий около 9,6 мВ в пиковом режиме. Экспериментирование с эталонным значением означало, что я мог (как на графике ниже) получить успешный результат. Однако это не был надежный или предсказуемый результат. Была проблема!
Полученная мудрость от людей, к которым я обратился за помощью, заключалась в том, что это сработало когда micro:bit питался от USB-кабеля через компьютер, потому что там был путь к земле.При питании от батарей вся цепь плавала.
Внедрение какого-то заземляющего слоя в конструкцию датчика Мне советовали. После нескольких итераций различных дизайнов прогресс был не делается. В отчаянии я прикрепил клипсу-крокодил от Штырь GND схемы micro:bit к медной ленте, с которой я экспериментировал с на дне коробки. БИНГО! Мы снова были в деле.
Несмотря на то, что пиковый режим составляет всего ~48 мВ, этого достаточно, чтобы получить стабильный и надежный сенсорный датчик даже через плакат.
Одна из замечательных особенностей micro:bit — отличная поддержка Bluetooth. Bluetooth позволит датчику обмениваться данными с чем-то вроде Raspberry Pi о своем статусе.
Одна из идей проекта предполагает наличие большего количества датчиков, чем количество устройств Bluetooth. соединения, которые может поддерживать Raspberry Pi. Это только ограничение, если вы хотите Raspberry Pi для отправки информации обратно на датчик.
Если датчик должен был только транслировать, то Raspberry Pi мог бы прослушивать
статус от многих датчиков.В приведенном выше коде мы меняем экземпляр на .
значение, показывающее, сработал датчик или нет.
Эти первоначальные тесты побудили меня попытаться реализовать проект с емкостным датчиком и микробитом.
Еще предстоит решить, каким именно будет этот проект, поскольку, похоже, может возникнуть несколько вопросов, которые необходимо решить. решить еще. Это означает, что это не будет чем-то слишком амбициозным (или дорогим).
Для справки вот код, который использовался для этих первоначальных тестов:
© Copyright 2021, Барри Байфорд.
последнее обновление: 31 октября 2021 г.
Эта работа находится под лицензией Creative Commons Attribution 4.0 International License.
Нелегко дать роботу осязание
У нас есть роботы, которые могут ходить, видеть, говорить и слышать, а также манипулировать объектами в своих роботизированных руках. Есть даже робот, который может чувствовать запах.
А как же осязание? Это легче сказать, чем сделать, и некоторые из рассматриваемых текущих методов имеют ограничения, но мы разрабатываем новую технику, которая может решить некоторые из этих проблем.
Для людей осязание играет жизненно важную роль, когда мы двигаемся. Осязание в сочетании со зрением имеет решающее значение для таких задач, как поднятие предметов — твердых или мягких, легких или тяжелых, теплых или холодных — без их повреждения.
В области роботизированных манипуляций, когда рука или захват робота должны поднимать объект, добавление осязания может устранить неопределенность при работе с мягкими, хрупкими и деформируемыми объектами.
Подробнее: Почему вы всегда должны пожимать руку роботу
В поисках умной кожи
Количественная оценка прикосновения с инженерной точки зрения требует не только точного знания величины внешней силы, приложенной к сенсорному датчику, но также необходимо знать точное положение силы, ее угол и то, как она будет взаимодействовать с объектом, которым манипулируют.
Тогда возникает вопрос, сколько таких датчиков потребуется роботу. Разработка кожи робота, которая может содержать сотни или даже тысячи сенсорных датчиков, является сложной инженерной задачей.
Понимание физических механизмов осязания в биологическом мире дает отличные знания, когда дело доходит до разработки роботизированного эквивалента — «умной кожи».
Но существенным препятствием для разработки умной кожи является необходимая электроника.
Кожа человека имеет множество сенсоров.
Повседневное измерение силы и касания
Осязание обычно измеряется датчиком, который может преобразовывать давление в слабый электрический сигнал. Когда вы используете цифровые весы, чтобы взвеситься или отмерить ингредиенты на кухне, весы, вероятно, используют пьезоэлектрический преобразователь.
Это устройство, которое превращает силу в электричество. Крошечный электрический ток от преобразователя затем проходит по проводам к небольшому микрочипу, который считывает силу тока, преобразует его в значимое измерение веса и отображает его на экране.
Несмотря на способность воспринимать различные уровни силы, эти электронные устройства имеют ряд ограничений, которые делают их непрактичными для умной кожи. В частности, они имеют относительно медленное время отклика на силу.
Существуют и другие типы датчиков прикосновения, основанные на изменении других электрических характеристик материала, таких как емкость или сопротивление. Эта технология может быть встроена в экран вашего мобильного телефона, и если вы используете трекпад на своем компьютере, он, безусловно, будет использовать сенсорные датчики.
Подробнее: Робот, который может трогать, есть и спать? Реальность киборгов, таких как Alita: Battle Angel
Мягкий и гибкий датчик силы
В последние годы достигнут большой прогресс в создании сенсорных датчиков, которые можно встраивать в мягкие и гибкие материалы. Это именно то, что нужно для умной кожи.
Но многие из этих разработок полностью выходят из строя (из-за сенсорного типа) при наличии влаги.(Вы когда-нибудь пробовали коснуться мокрым пальцем сенсорного экрана своего смартфона?)
Вода и некоторые типы сенсорных технологий несовместимы.
Медицинские приложения в настоящее время являются основной движущей силой спроса на гибкие и надежные датчики силы. Например, умную кожу можно использовать для восстановления сенсорной обратной связи у пациентов с повреждением кожи или периферической невропатией (онемение или покалывание). Его также можно использовать для придания протезам рук базовой способности к осязанию.
Недавно исследователи из Массачусетского технологического института и Гарварда разработали масштабируемую тактильную перчатку и объединили ее с искусственным интеллектом. Датчики, равномерно распределенные по руке, можно использовать для идентификации отдельных объектов, оценки их веса и изучения типичных тактильных паттернов, возникающих при их захвате.
Исследователи создали перчатку с 548 датчиками, собранными на трикотажном полотне, содержащем пьезорезистивную пленку (которая также реагирует на давление или растяжение), соединенных сетью токопроводящих нитей-электродов.
Это первая успешная попытка регистрации таких сигналов в больших масштабах, раскрывающая важные идеи, которые могут быть использованы в будущем при разработке протезов и инструментов для захвата роботов.
Но, как и почти все другие сенсорные интерфейсы, разработанные с использованием емкостных, резистивных или пьезоэлектрических технологий, эта тактильная технология плохо работает с мокрыми пальцами или под водой.
Подробнее: Секс-роботы уже есть, но законы не поспевают за этическими проблемами и проблемами конфиденциальности, которые они поднимают
Датчик оптической силы на горизонте
Чтобы решить эту проблему, мы разработали новую форму тактильного датчика, в котором используются нанометровые пленки органических светодиодов (OLED) и органических фотодиодов (OPD) для измерения мягкого прикосновения.
ТехнологияOLED обычно используется в экранах телевизоров и смартфонов. Наш подход к измерению осязания основан на измерении оптической силы.
Элементы OLED (называемые диодами или пикселями) на самом деле полностью обратимы. Это означает, что эти пиксели могут не только излучать свет (как на экране телевизора), но и обнаруживать свет.
Используя этот принцип, мы можем изготовить крошечный непрозрачный гибкий купол с отражающим покрытием, который размещается над несколькими пикселями OLED.Свет, излучаемый центральным пикселем, равномерно распределяется по всем остальным пикселям под куполом, если купол не нарушен.
Единственный сенсорный элемент, состоящий из купола над несколькими OLED-пикселями. Вверху, когда ничто не касается купола, равное количество света отражается от светоизлучающего пикселя B к пикселям обнаружения света A и C. Внизу, когда что-то касается купола, он деформируется, и количество отраженного света меняется между пикселями A и С. Аджай Панди, автор предоставилНо если на купол надавить, коснувшись чего-либо, он деформируется, что приведет к неодинаковому отклику пикселей, используемых для обнаружения отраженного света.Комбинируя отклики десятков этих куполов в зоне контакта, можно будет оценить приложенную силу.
Этот подход является важным шагом на пути к упрощению компоновки смарт-скинов для приложений на больших площадях, и мы надеемся, что вскоре мы увидим роботов, которые могут полностью ощущать тело в воздухе, во влажном состоянии или даже под водой.
Наше оборудование использует емкостное измерение. Что это такое? – Голый токопроводящий
Наши Touch Board, Pi Cap и Light Up Board используют умную физику, чтобы сделать любую поверхность интерактивной.
В Bare Conductive мы сосредоточены на создании масштабируемых интеллектуальных поверхностей, и емкостное восприятие является основополагающей частью этого видения.Начиная с нашей Electric Paint, компания Bare Conductive создала инструменты, упрощающие создание прототипов интеллектуальных поверхностей. С самого начала наши клиенты использовали Electric Paint для создания емкостных датчиков на самых разных поверхностях для столь же разнообразных вариантов использования. Наши Touch Board, Pi Cap и Light Up Board используют емкостное восприятие, чтобы превратить подушку Electric Paint в мощный датчик. Эта функциональность не ограничивается созданием прототипов. Динамически функциональные поверхности Bare Conductive используют емкостные датчики для создания решений для OEM-партнеров в области интеллектуальных зданий и автомобилей.Учитывая наше глубокое понимание этой технологии, мы подумали, что было бы полезно обсудить емкостные датчики более подробно, чтобы дать вам больше информации о наших продуктах и той роли, которую емкостные датчики играют в нашей повседневной жизни.
Емкостное распознавание — это технология, которую можно рассматривать как замену механических кнопок, и это широко распространенная технология, например, каждый смартфон использует емкостное считывание внутри экрана, чтобы сделать его сенсорным экраном. Хотя существуют разные способы достижения емкостного восприятия, принципы аналогичны, и с емкостным датчиком пользователь может обнаруживать либо прикосновение, либо близость.
Наша технология и наши продукты, включая Touch Board, Pi Cap и Light Up Board, основаны на одной и той же технологии. Вместе с Electric Paint он позволяет пользователям создавать различные интерфейсы, датчики присутствия или датчики жидкости. Но что такое емкостное зондирование?
Как работают емкостные датчики?
Во-первых, давайте обсудим, что такое конденсатор. В электрической цепи есть три основных компонента: резисторы, конденсаторы и катушки индуктивности.Резистор — это пассивный элемент, который рассеивает энергию. Катушки индуктивности и конденсаторы, однако, являются активными элементами, они накапливают энергию, и именно конденсаторы позволяют проводить емкостные измерения. И наоборот, вы можете проводить индуктивное зондирование с помощью катушек индуктивности.
Конденсатор в своей простейшей форме представляет собой две проводящие пластины, разделенные диэлектрической средой, которая может быть воздухом, но в большинстве случаев фарфором, стеклом или пластиком. Когда на конденсатор подается напряжение, они накапливают заряд, и на диэлектрике образуется электрическое поле.Конденсаторы можно использовать для сглаживания выходного напряжения источника питания или для фильтрации при обработке сигналов. Количество заряда, которое может хранить конденсатор, зависит от его емкости, а емкость конденсатора зависит от площади и расстояния до пластины и диэлектрической проницаемости. Емкостное измерение, в свою очередь, обнаруживает изменение емкости. Индуктивный датчик подобен емкостному датчику, но использует индуктивность датчика для обнаружения или измерения объектов.
Таким образом, сенсорный емкостный датчик представляет собой датчик, который использует изменение емкости для обнаружения прикосновения или присутствия сыпучего материала или жидкости.Емкостные датчики приближения работают так же, как сенсорные емкостные датчики, за исключением того, что они более чувствительны. Есть два распространенных способа емкостного зондирования. Одним из них является собственная емкость, и мы используем это ощущение в нашей технологии. На наших платах есть ряд электродов, которые используются для емкостных датчиков. Вы можете думать о них как об одной пластине конденсатора с параллельными пластинами. Другая пластина — это поверхность земли — очень большая, но довольно далекая. Когда вы приближаете часть своего тела к одному из этих электродов, эта часть тела действует как другая пластина конденсатора.Он берет верх над землей, так как часть тела намного ближе и поэтому оказывает большее влияние, и это увеличивает емкость, измеренную на этом электроде. Это датчик приближения и это изменение регистрируется платой. Если вы поднесете руку так близко, что фактически коснетесь электрода, эффект будет даже больше, чем если бы вы были просто рядом с ним. Если вы посмотрите на выходной сигнал этого электрода на нашем Grapher, вы заметите, что линия идет вниз, а не вверх — это потому, что чип, который измеряет емкость на наших платах, имеет выход, обратно пропорциональный емкости — если емкость идет вверх, выход идет вниз.Каждый электрод наших плат действует как емкостный датчик касания или емкостный датчик приближения. Этот метод емкостного измерения называется собственной емкостью, и каждый электрод работает независимо. Здесь емкость измеряется относительно земли.
Другим методом является взаимное емкостное зондирование, которое используется в сенсорных экранах смартфонов. При взаимном емкостном восприятии две сетки конденсаторов перекрывают друг друга. Вместо двух емкостных пластин, которые не обращены друг к другу, пластины лежат рядом друг с другом.Когда подается напряжение, у вас есть сетка пластин конденсатора, которые генерируют электрическое поле между ними. Когда вы приближаетесь к ним пальцем, меняется характеристика поля, и это изменение регистрируется как прикосновение. Этот метод емкостного восприятия позволяет обнаруживать более одного емкостного прикосновения, а вместо этого может обнаруживать несколько прикосновений.
Еще одним важным типом емкостных датчиков является емкостный датчик перемещения. Они в основном используются в производстве и используются для измерения расстояний и любых перемещений.В емкостном датчике смещения у вас есть одна часть конденсатора цилиндрической формы, которая образует первую пластину вашего конденсатора. Другая пластина образована измеряемой площадью. Поскольку площадь и диэлектрическая проницаемость датчика остаются постоянными, расстояние можно измерить, обнаружив изменения емкости, что позволяет определить положение объекта.
Благодаря емкостному датчику пользователь может обнаруживать и измерять прикосновение или близость, наличие сыпучего материала или уровня жидкости и многое другое.Вы можете использовать емкостной датчик для создания сенсорных интерфейсов, таких как сенсорный экран на смартфоне, или в качестве датчика приближения, где вы можете создать переключатель, наведя руку на датчик.
Преимущества емкостного датчика
Емкостные датчики используются для обнаружения целого ряда объектов, от непроводящих и проводящих материалов до крошечных объектов, таких как насекомые, и более крупных, таких как человек. Использование емкостного измерения дает много преимуществ по сравнению с другими технологиями измерения.Мы используем эти функции в нашей технологии для обнаружения активных взаимодействий, таких как прикосновения и движения рук, для создания интерфейсов, а также пассивных, например датчиков присутствия. Еще одним преимуществом емкостных датчиков является то, что они могут обнаруживать как твердые материалы, так и жидкости. Возможно, вы видели это, когда у вас на сенсорном экране смартфона появляются капли, и он перестает отвечать на запросы. Мы используем эту мощь в другом приложении, потому что используем нашу технологию емкостных датчиков для создания датчиков уровня жидкости, таких как детектор утечек.
С помощью емкостного датчика можно не только обнаруживать емкостное касание, но и использовать его в качестве датчика приближения. Это можно использовать двумя способами. Во-первых, вы можете создать емкостный датчик и использовать его в качестве выключателя света. Но вместо того, чтобы прикасаться к датчику, вы можете подойти к датчику рукой, чтобы включить свет. Во-вторых, вы можете встроить датчики в другой материал, например, в пластик. Затем вы можете коснуться пластиковой поверхности, чтобы вызвать событие. Это может показаться еще одним сенсорным датчиком, но это емкостный датчик приближения, даже если вы касаетесь пластика.Таким образом, емкостные датчики можно встроить и спрятать в окружающей среде, а эти интерфейсы можно легко очистить или спрятать даже под полом в комнате.
Емкостные датчики не ограничиваются бинарными функциями и действуют как переключатели включения и выключения. Их также можно использовать для создания переключателя, где можно регулировать яркость, приближая к датчику руку или тело. Действительно, это то, что мы имеем в качестве примера с нашим комплектом электрических ламп для рисования, где одна лампа использует электрод платы для определения близости.
Наконец, емкостные датчики, по сравнению с другими сенсорными технологиями, дешевле в изготовлении, сохраняя при этом высокое разрешение и легко настраиваемые. Использование наших печатных датчиков в сочетании с емкостным датчиком касания наших плат — это лишь один пример того, как вы можете объединить две технологии для создания эффективного датчика приближения и касания с высоким разрешением.
Последнее преимущество, перечисленное выше, также является одним из основных недостатков емкостных датчиков: высокий уровень точности означает, что на датчики легко влияют шумы, такие как изменение влажности или изменение окружающей среды.Вот почему в некоторых приложениях лучше использовать индуктивный датчик вместо емкостного. Кроме того, необходимо учитывать паразитную емкость, которая представляет собой любую нежелательную емкость, которая может возникнуть в цепи. Эти недостатки необходимо учитывать при работе с емкостными датчиками. Вот почему, например, мы включаем экранированные кабели в наш комплект Interactive Wall, так как это уменьшает шумовые помехи.
Как использовать емкостное измерение
Емкостные датчики отлично подходят для создания сенсорных интерфейсов, бесконтактных интерфейсов, детекторов движения, силы и ускорения или для использования в качестве датчиков уровня жидкости и влажности.В зависимости от вашего приложения внедрение емкостного датчика может варьироваться от простого в реализации до более сложной технологии.
С помощью наших плат, например Touch Board, Pi Cap и Light Up Board, очень легко создать емкостный датчик касания. Каждая плата имеет как минимум 6 электродов, которые действуют как датчики и могут быть расширены с помощью проводящего материала, такого как Electric Paint, тем самым увеличивая или расширяя зону обнаружения. Каждый электрод может действовать как датчик прикосновения или приближения.
Электрод и датчик работают следующим образом: когда на одну из плат подается питание, на каждый датчик подается напряжение. Это создает электрическое поле вокруг каждого емкостного датчика относительно земли. Когда вы касаетесь сенсора пальцем, вы изменяете электрическое поле и, следовательно, емкость сенсора. Это изменение обнаруживается и интерпретируется как прикосновение. Изменяя настройки, можно обнаружить небольшие изменения в электрическом поле и интерпретировать их как приближение пальца, что создает датчик приближения.Этот метод емкостного измерения называется собственной емкостью.
На сенсорном экране вашего устройства очень похоже. Но вместо того, чтобы каждый конденсатор был связан с землей, существует целый ряд конденсаторов, которые связаны друг с другом через емкостную связь. Связь между каждым крошечным конденсатором характеризуется взаимной емкостью. Когда пользователь касается экрана, он снова изменяет электрическое поле конденсаторов и изменяет взаимную емкость.
Использование емкостного датчика дает ряд преимуществ, таких как возможность скрыть датчик за материалами, которые легко чистить, или оставить их в качестве датчика приближения. С помощью нашего набора Touch Board Pro Kit можно легко создать прототип емкостного датчика приближения и использовать его в качестве выключателя света: достаточно провести рукой над датчиком, чтобы включить свет.
Где сегодня используются емкостные датчики
Емкостные датчики можно использовать в целом ряде приложений.Наиболее распространенным является использование его с сенсорным экраном. Гибкость и низкая стоимость создания емкостных датчиков с использованием оксида индия-олова, который является почти прозрачным проводником, — вот что делает смартфоны такими волшебными: пользователь касается кусочка стекла, чтобы взаимодействовать со своим устройством.
Мы используем емкостное зондирование по-другому. С нашими платами, например Touch Board, Pi Cap или Light Up Board, многие члены нашего сообщества используют сенсорную технологию для создания простых, но очень эффективных интерфейсов.Будь то массивная интерактивная фреска для проекционного мэппинга или сенсорная кнопка в лампе. Мы разработали наши доски с расчетом на электрическую краску. Преимущество Electric Paint в том, что он дает пользователю большую гибкость и творческий подход. Вы можете нарисовать нужную форму для творческих целей или распечатать датчик на бумаге или другой подложке, чтобы встроить датчик в окружающую среду. Сочетание нашей технологии Electric Paint и емкостной сенсорной технологии позволяет превратить любую поверхность и объект в датчик.Вы можете покрасить стену краской или вставить сенсорную панель с краской за поверхность стола, а затем подключить краску к сенсорному электроду. Тогда стена станет емкостным датчиком касания, на столе будет размещен емкостный датчик приближения, а обычные предметы мы превратили в умные поверхности.
Интерфейс — это активный элемент дизайна, но вы также можете использовать емкостные датчики в качестве более пассивного элемента. Одним из примеров является датчик присутствия. Эти датчики присутствия могут использоваться в различных приложениях, будь то простой датчик присутствия в кресле, определяющий, использует ли кто-то кресло или правильно сидит, или встроенный датчик присутствия под полом.Затем датчик пола можно использовать в коммерческой среде, чтобы узнать, сколько покупателей находится в магазине, или в здравоохранении, где вы можете определить, упал ли кто-то.
Если вы хотите использовать емкостные датчики в своих приложениях, наши комплекты средств разработки и аппаратное обеспечение станут удобной отправной точкой для создания прототипов умных поверхностей. Для компаний, которые хотят интегрировать умные материалы непосредственно в свои материалы или продукты, мы всегда ищем интересные партнерские отношения, в которых наши технологии могут повысить ценность.Мы считаем, что наша технология обещает по-настоящему интегрировать Интернет вещей в нашу жизнь бесшовным и ненавязчивым образом, и мы работаем над созданием емкостных датчиков непосредственно в нашей среде, делая пространство и поверхности вокруг нас более умными и здоровыми.
