Как работает ультразвуковой датчик расстояния. Для чего используются ультразвуковые датчики в робототехнике и промышленности. Какие основные параметры и характеристики имеют популярные модели ультразвуковых дальномеров. Как правильно подключить и настроить ультразвуковой сенсор.
Принцип работы ультразвукового датчика расстояния
Ультразвуковой датчик расстояния работает по принципу эхолокации. Его основные компоненты:
- Излучатель ультразвуковых волн
- Приемник отраженного сигнала
- Электронная схема для обработки сигналов
Процесс измерения расстояния происходит следующим образом:
- Излучатель генерирует короткий ультразвуковой импульс (обычно на частоте 40 кГц)
- Звуковая волна отражается от препятствия и возвращается к датчику
- Приемник фиксирует отраженный сигнал
- Электронная схема измеряет время между отправкой и приемом сигнала
- Расстояние рассчитывается по формуле: S = v * t / 2, где v — скорость звука, t — время
Такой принцип позволяет точно измерять расстояние до объектов в диапазоне от нескольких сантиметров до нескольких метров.

Области применения ультразвуковых датчиков
Ультразвуковые датчики расстояния широко используются в различных сферах:
- Робототехника — для ориентации роботов в пространстве
- Автомобильная промышленность — системы помощи при парковке
- Охранные системы — обнаружение движения
- Промышленная автоматизация — контроль уровня жидкости в резервуарах
- Беспилотные летательные аппараты — для предотвращения столкновений
Основные преимущества ультразвуковых датчиков:
- Бесконтактное измерение
- Работа при любом освещении
- Нечувствительность к цвету и прозрачности объектов
- Возможность измерения через воздух, газ или жидкость
Характеристики популярных моделей ультразвуковых датчиков
Рассмотрим параметры наиболее распространенных ультразвуковых датчиков расстояния:HC-SR04
- Диапазон измерения: 2-400 см
- Точность: ±3 мм
- Угол обзора: 15°
- Напряжение питания: 5В
- Частота ультразвука: 40 кГц
US-015
- Диапазон измерения: 2-400 см
- Точность: ±1 мм
- Угол обзора: 20°
- Напряжение питания: 3-5.5В
- Частота ультразвука: 40 кГц
JSN-SR04T
- Диапазон измерения: 20-600 см
- Точность: ±1 см
- Угол обзора: 75°
- Напряжение питания: 3.3-5В
- Степень защиты: IP67 (водонепроницаемый)
При выборе датчика следует учитывать требуемый диапазон, точность, условия эксплуатации и совместимость с управляющей электроникой.

Подключение и настройка ультразвукового датчика
Рассмотрим процесс подключения и настройки на примере популярного датчика HC-SR04:
- Подключите питание датчика (Vcc) к 5В
- Соедините GND датчика с общим проводом схемы
- Подключите вывод Trig к цифровому выходу микроконтроллера
- Соедините Echo с цифровым входом микроконтроллера
Алгоритм работы с датчиком:
- Подайте короткий импульс (10 мкс) на вход Trig
- Датчик отправит 8 ультразвуковых импульсов
- Измерьте длительность импульса на выходе Echo
- Рассчитайте расстояние по формуле: S (см) = длительность (мкс) / 58
Для корректной работы важно учитывать минимальный интервал между измерениями (обычно 50-60 мс) и возможные помехи от других ультразвуковых устройств.
Ограничения и особенности использования ультразвуковых датчиков
При работе с ультразвуковыми датчиками расстояния следует учитывать ряд факторов:
- Мягкие и пористые материалы могут поглощать ультразвук, что снижает точность измерений
- Наклонные поверхности могут отражать сигнал в сторону от датчика
- Температура и влажность воздуха влияют на скорость звука
- Сильный ветер может искажать результаты измерений
- Работа нескольких датчиков рядом может вызывать взаимные помехи
Для повышения надежности измерений рекомендуется:

- Использовать усреднение нескольких последовательных измерений
- Применять фильтрацию выбросов в показаниях датчика
- Учитывать температуру воздуха при расчете расстояния
- Правильно ориентировать датчик относительно измеряемых объектов
Сравнение ультразвуковых датчиков с другими типами сенсоров расстояния
Рассмотрим преимущества и недостатки ультразвуковых датчиков в сравнении с другими технологиями измерения расстояния:
Инфракрасные датчики
Преимущества ультразвуковых датчиков:
- Нечувствительность к цвету и прозрачности объектов
- Больший диапазон измерения
- Работа при любом освещении
Недостатки:
- Чувствительность к температуре и влажности
Лазерные дальномеры
Преимущества ультразвуковых датчиков:
- Более низкая стоимость
- Возможность работы с прозрачными объектами
- Безопасность для глаз
Недостатки:
- Меньшая точность и дальность измерения
- Более широкий угол обзора
Выбор типа датчика зависит от конкретной задачи, требований к точности, дальности и условий эксплуатации.

Перспективы развития ультразвуковых технологий измерения расстояния
Ультразвуковые датчики продолжают совершенствоваться. Основные направления развития:
- Повышение точности и дальности измерений
- Уменьшение энергопотребления
- Интеграция с другими типами сенсоров (мультисенсорные системы)
- Применение алгоритмов машинного обучения для обработки данных
- Разработка миниатюрных датчиков для мобильных устройств
Ожидается, что ультразвуковые датчики будут играть важную роль в развитии технологий автономного транспорта, умных домов и промышленной автоматизации.
Изучаем ультразвуковой датчик Lego mindstorms EV3
Содержание урока Введение: 7.1. Изучаем ультразвуковой датчик 7.2. Робот-полицейский 7.3. Ультразвуковой датчик — режим «Присутствие/слушать»
Введение:
Текущий урок мы посвятим изучению ультразвукового датчика. Данный датчик присутствует только в образовательной версии набора Lego mindstorms EV3. Тем не менее, пользователям домашней версии конструктора советуем тоже обратить внимание на данный урок. Возможно, что прочитав о назначении и использовании этого датчика, вы пожелаете его приобрести в дополнение к своему набору.
7.1. Изучаем ультразвуковой датчик
Главное назначение ультразвукового датчика, это определение расстояния до предметов, находящихся перед ним. Для этого датчик посылает звуковую волну высокой частоты (ультразвук), ловит обратную волну, отраженную от объекта и, замерив время на возвращение ультразвукового импульса, с высокой точностью рассчитывает расстояние до предмета.
Рис. 1
Ультразвуковой датчик может выдавать измеренное расстояние в сантиметрах или в дюймах. Диапазон измерений датчика в сантиметрах равен от 0 до 255 см, в дюймах — от 0 до 100 дюймов. Датчик не может обнаруживать предметы на расстоянии менее 3 см (1,5 дюймов). Так же он не достаточно устойчиво измеряет расстояние до мягких, тканевых и малообъемных объектов. Кроме режимов измерения расстояния в сантиметрах и дюймах датчик имеет специальный режим
У нашего робота, собранного по инструкции small-robot-45544, ультразвуковой датчик уже закреплен впереди по ходу движения. Подключим его кабелем к порту «3» модуля EV3 и приступим к разбору практических примеров использования ультразвукового датчика.
Задача №14: написать программу, останавливающую прямолинейно движущегося робота, на расстоянии 15 см до стены или препятствия.
Для решения задачи воспользуемся уже знакомым нам программным блоком «Ожидание» Оранжевой палитры, переключив его в Режим: «Ультразвуковой датчик» — «Сравнение» — «Расстояние в сантиметрах» (Рис. 2). Само решение будет похоже на решение Задачи №7.
Рис. 2
Решение:
- Начать прямолинейное движение вперед (Рис. 3 поз. 1)
- Ждать, пока значение ультразвукового датчика не станет меньше 15 см. (Рис. 3 поз. 2)
- Прекратить движение вперед (Рис. 3 поз. 3)
Рис. 3
Задача решена!
Задача №15: написать программу для робота, держащего дистанцию в 15 см от препятствия.
Решение:
Поведение робота будет следующим:
- при значении показания ультразвукового датчика больше 15 см робот будет двигаться вперед, стараясь приблизиться к препятствию;
- при значении показания ультразвукового датчика меньше 15 см робот будет двигаться назад, стараясь удалиться от препятствия.

Мы уже знаем, что за организацию выбора выполняемых блоков в зависимости от условия отвечает программный блок «Переключатель» Оранжевой палитры. Установим для блока «Переключатель» режим «Ультразвуковой датчик» — «Сравнение» — «Расстояние в сантиметрах» (Рис. 4 поз.1). Параметр «Тип сравнения» блока «Переключатель» установим в значение «Больше»=2, а «Пороговое значение» определим равным 15 (Рис. 4 поз. 2). Такие настройки программного блока «Переключатель» приведут к следующему поведению программы: При показаниях ультразвукового датчика больше 15 см будут выполняться программные блоки, помещенные в верхний контейнер (Рис. 4 поз. 3)
, в противном случае будут выполняться программные блоки, помещенные в нижний контейнер (Рис. 4 поз. 4).Рис. 4
Поместим в эти контейнеры программные блоки, включающие движение вперед и назад. Для того чтобы программный блок «Переключатель» выполнялся многократно, поместим его внутрь программного блока «Цикл» Оранжевой палитры (Рис. 5).
Для того чтобы программный блок «Переключатель» выполнялся многократно, поместим его внутрь программного блока «Цикл» Оранжевой палитры (Рис. 5).
Рис. 5
Загрузите получившуюся программу в робота и запустите ее на выполнение. Если перед роботом отсутствует препятствие, то он поедет вперед. Поднесите руку близко к ультразвуковому датчику, попробуйте отводить — приближать руку. Как ведет себя робот? Ждем ваши комментарии к этому уроку.
7.2. Робот-полицейский
Принцип работы ультразвукового датчика очень похож на радар, который применяется для измерения скорости движущихся автомобилей. Как радар узнаёт скорость автомобиля? Он измеряет расстояние до движущегося объекта, ждёт заданное небольшое время и повторяет измерение. Разность расстояний — это пройденный путь автомобиля. Разделив пройденный путь на время между двумя измерениями, можно найти скорость, с которой двигался объект измерения.
Давайте же научим и нашего робота работе радара!
Рис. 6
6
Последовательность действий, выполняемых роботом, будет следующей:
- Робот ждёт появления в зоне контроля движущегося объекта;
- измеряет расстояние до объекта;
- ждёт 1 секунду;
- повторно измеряет расстояние до объекта;
- находит пройденное расстояние и сравнивает его с пороговым значением;
- выводит на экран результат и подает тревогу в случае превышения скорости.
Начнём создавать программу для нашего робота-полицейского.
- С помощью программного блока «Ожидание» ждём появления объекта в зоне контроля робота (Рис. 7 поз. 1). Расстояние до объекта передаем в программный блок «Математика» (Рис. 7 поз. 4).
- С помощью программного блока «Ожидание» ждем 1 секунду.
- Второй раз снимаем показание ультразвукового датчика (Рис. 7 поз. 3) и передаем полученное значение в программный блок «Математика» (Рис.
 7 поз. 4).
7 поз. 4). - В программном блоке «Математика» находим расстояние, пройденное объектом измерения за 1 секунду. Полученное значение передаем в программный блок «Сравнение» (Рис. 7 поз. 5) и выводим на экран (Рис. 7 поз. 6).
- С помощью программного блока «Сравнение» (Рис. 7 поз. 5) сравниваем пройденное расстояние с пороговым значением, равным 10. Результат сравнения двух чисел представляет собой логический вывод. Логический вывод может принимать одно из двух значений: «Да» или «Нет». Этот вывод мы передаем в прогаммный блок «Переключатель» (Рис. 7 поз. 7), настроив его на прием логических значений. Обратите внимание: шины данных, передающие логические значения, окрашены в зеленый цвет, в отличие от желтых шин данных, передающих числовые значения. (В дальнейшем мы подробнее ознакомимся с принципами обработки логических значений).

- С помощью программного блока «Переключатель» мы организуем две ветки поведения программы в зависимости от скорости объекта. Если объект за 1 секунду приблизился к роботу, больше чем на 10 см, значит, будем считать его приближение критическим и подадим сигналы тревоги (Рис. 7 поз. 8). В противном случае будем считать, что объект движется медленно, в этом случае робот включит зеленую подсветку клавиш модуля EV3 и произнесёт «Okay».
- В конце программы еще раз воспользуемся программным блоком «Ожидание» (Рис. 7 поз. 10) и «придержим» завершение программы на 5 секунд, чтобы успеть прочитать информацию на экране модуля EV3.
Рис. 7
Загрузите программу в робота, расположите робота так, чтобы перед ним на расстоянии 60 сантиметров отсутствовали другие предметы, запустите программу на выполнение. Перемещайте в направлении к роботу игрушечный автомобиль или объемный предмет, наблюдайте за реакцией робота. Попробуйте изменять пороговые значения в программе. Как изменяется поведение робота? Опишите свои наблюдения в комментарии к этому уроку.
Попробуйте изменять пороговые значения в программе. Как изменяется поведение робота? Опишите свои наблюдения в комментарии к этому уроку.
7.3. Ультразвуковой датчик — режим «Присутствие/слушать»
Как уже отмечалось выше, в этом режиме ультразвуковой датчик способен обнаруживать излучение другого ультразвукового датчика. Результатом обнаружения является логическое значение: «Да», если найдено ультразвуковое излучение, или «Нет», если ничего не найдено. Данный режим можно использовать, например, в состязаниях роботов-шпионов (описание режима уже говорит о том, что для его использования необходимо минимум два робота).
Задача № 16: необходимо написать программу, обнаруживающую другого робота, с работающим ультразвуковым датчиком.
Попробуйте написать программу самостоятельно, не подглядывая в решение!
Решение Задачи №16 Используя знания, полученные ранее, попробуйте самостоятельно разобрать вариант решения Задачи №16. Предложите свой вариант решения…
Предложите свой вариант решения…
Ультразвуковые датчики — Микроэлектроника
Что бы робот мог объезжать препятствия, ему нужно их видеть. Для того что бы робот стал зрячим обычно используют ультразвуковой датчик измерения расстояния. Дальность действия датчика — 180 см.
Эйдзи Накано — Введение в робототехнику. Глава V. Сенсорные устройства роботов. Ультразвуковые датчики
Пьезоэлектрический эффект
Принцип действия
Ультразвуковой дальномер определяет расстояние до объектов точно так же, как это делают дельфины или летучие мыши. Он генерирует звуковые импульсы на частоте 40 кГц и слушает эхо. По времени распространения звуковой волны туда и обратно можно однозначно определить расстояние до объекта.
В отличие от инфракрасных дальномеров, на показания ультразвукового дальномера не влияют засветки от солнца или цвет объекта. Но могут возникнуть трудности с определением расстояния до пушистых или очень тонких предметов. Поэтому высокотехнологичную мышеловку выполнить на нём будет затруднительно.
При отражении звука от препятствия мы слышим эхо. Летучая мышь использует отражение ультразвуковых волн для полётов в темноте и для охоты на насекомых. По такому же принципу работает эхолот, с помощью которого измеряется глубина воды под днищем корабля или поиск рыбы.
Принцип передачи и приема ультразвуковой энергии лежит в основе многих очень популярных ультразвуковых датчиков и детекторов скорости. Ультразвуковые волны являются механическими акустическими волнами, частота которых лежит за пределами слышимости человеческого уха — более 20 кГц. Однако сигналы этих частот воспринимаются некоторыми животными: собаками, кошками, грызунами и насекомыми. А некоторые виды млекопитающих, таких как летучие мыши и дельфины, общаются друг с другом ультразвуковыми сигналами.
А некоторые виды млекопитающих, таких как летучие мыши и дельфины, общаются друг с другом ультразвуковыми сигналами.
УЛЬТРАЗВУКОВОЙ ДАТЧИК Lego Mindstorm EV 3. ЗРИ В КОРЕНЬ
Технические спецификации и особенности продукта:
-
- Измерение расстояния в диапазоне от 1 до 250 см
- Точность измерения до +/- 1 см
- Передняя подсветка в виде красного кольца горит постоянно при передаче сигнала и мигает при прослушивании эфира
- Если ультразвуковой сигнал распознан, датчик возвращает логическое значение «Истина»
- Автоматическая идентификация производится программным обеспечением микрокомпьютера EV3
Рис. 1 Ультразвуковой датчик Lego Mindstorm EV 3 (стоимость вместе с внутренним микроконтроллером и микросхемами усиления сигнала $50, при себестоимости $5)
Рис. 2 Схема ультразвукового датчика Lego Mindstorm EV 3 (ultrasonic sensor hardware schematics) построена на микроконтроллере STM8S103F3
- Введение в микроконтроллеры stm8
- Микроконтроллер STM8S103F3
- Схема центрального микроконтроллера LEGO MINDSTORMS EV3 programmable brick main hardware schematics
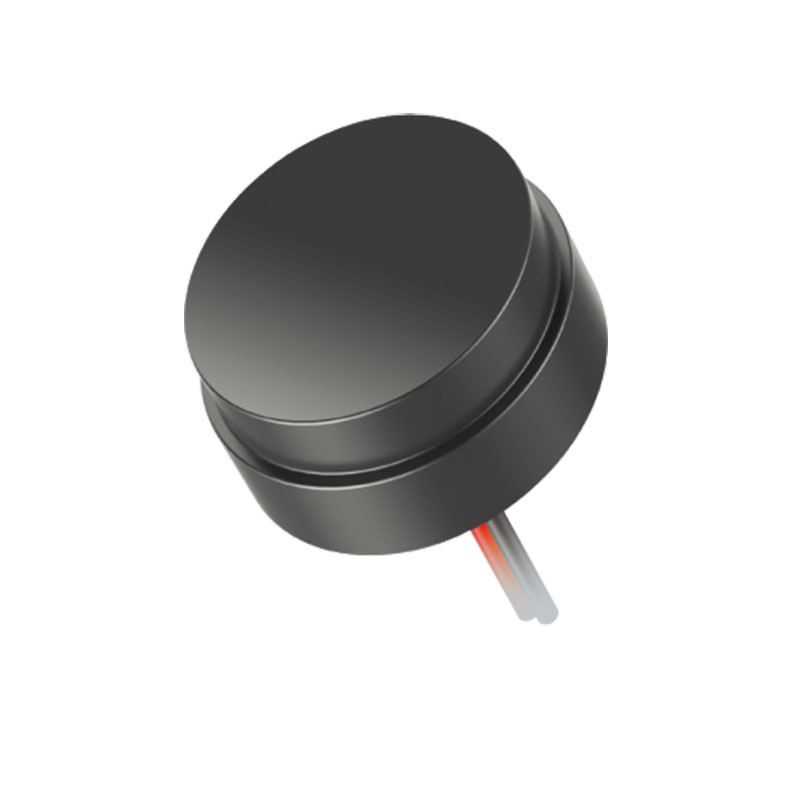
Рис. 3 Ультразвуковые излучатель AW8T40 и приемник AW8R40 ультразвукового датчика Lego Mindstorm EV 3
3 Ультразвуковые излучатель AW8T40 и приемник AW8R40 ультразвукового датчика Lego Mindstorm EV 3
Ультразвуковой датчик HC-SR04
Ультразвуковой датчик HC-SR04 — Ultrasonic Ranging Module HC — SR04 — Ultrasonic Sensor Distance Measuring Module — Sonar
Ультразвуковой дальномер HC SR04 самый известный датчик для применения в Arduino, Raspberry Pi, ESP8266 и ESP32 модулях. Позволяет измерять расстояние до объекта в диапазоне от 2 до 400 (180) см. Например, если вы хотите собрать робота, который объезжает преграды, то данный дальномер прекрасно подойдет для ваших задач. Датчик имеет небольшие габариты и простой интерфейс.
Рис. 4 Внешний вид ультразвукового датчика (сонара, ультразвукового сенсора, ультразвукового модуля) HC-SR04
Названия выводов и ультразвуковых излучателей модуля
- Vcc — положительный контакт питания.
- Trig — цифровой вход. Для запуска измерения необходимо подать на этот вход импульс (логическую единицу) длительностью 10 мкс.
 Следующий импульс рекомендуется подавать не ранее чем через 50 мс. что связано со временем обработки первого импульса.
Следующий импульс рекомендуется подавать не ранее чем через 50 мс. что связано со временем обработки первого импульса. - Echo — цифровой выход. После обработки отраженного сигнала, на этот выход будет подан импульс (логическая единица), длительностью пропорциональной расстоянию до объекта.
- GND — отрицательный контакт питания (земля).
- Левый ультразвуковой излучатель (маркирован буквой Т — transmiter) это передатчик ультразвукового сигнала, правый ультразвуковой излучатель (маркирован буквой R — resiver) это приемник отраженного от объекта ультразвукового сигнала (эха).
Характеристики
- Напряжение питания: 5 В. Модель HC-SR04 + работает в диапазоне от 3,3В-5В (помечено как HC-SR04 + на задней стороне платы модуля)
- Потребление в режиме тишины: 2 мА
- Потребление при работе: 15 мА
- Максимальная частота опроса датчика: 20 Гц (Период опроса 50 мс)
- Частота ультразвука: 40 кГц
- Дальность обзора: 2 см – 4 м (1,8 м)
- Разрешение (градация выходного сигнала): 0,3 см
- Эффективный угол наблюдения: 15°
- Рабочий угол наблюдения: 30°
- вес — 8,28 грамм
- Размеры: 45*20*15 мм.
 ДхШхГ (Ш — без учета контактов подключения)
ДхШхГ (Ш — без учета контактов подключения)
Рис. 5 Размеры ультразвукового датчика HC-SR04
- Внимание:
! Модуль не рекомендуется подключать непосредственно к подключенной к электропитанию плате микроконтроллера, необходимо отключить электропитание в момент подключения модуля , первым должен быть подключен вывод GND модуля, в противном случае,это может повлиять на нормальную работу модуля. - ! При испытании модуля на дальность и точность измерения, размер площади объекта сканирования должен не менее 0,5 квадратных метров и его поверхность должна быть как можно тверже и ровнее, в противном случае, это будет влиять на результаты измерений.
Рис. 6 Диаграмма направленности ультразвукового датчика HC-SR04. Взята из документации на этот датчик
Описание работы:
Тест угла обзора датчика, взят из описания с сайта:
- https://life-prog.ru/view_msinv.php?id=62%D0%BC%D0%BE%D0%B6%D0%B5%D1%82
Ультразвуковой датчик расстояния определяет расстояние до объекта, измеряя время отображения звуковой волны от объекта. Частота звуковой волны находится в пределах частоты ультразвука, что обеспечивает концентрированное направление звуковой волны, так как звук с высокой частотой рассеивается в окружающей среде меньше. Типичный ультразвуковой датчик расстояния состоит из двух мембран, одна из которых генерирует звук, а другая регистрирует отображенное эхо. Образно говоря, мы имеем дело со звуковой колонкой и микрофоном. Звуковой генератор создает маленький, с некоторым периодом ультразвуковой импульс и запускает таймер. Рисунок 3 – Ультразвуковой датчик расстояния HC-SR04 Вторая мембрана регистрирует прибытие отображенного импульса и останавливает таймер. От времени таймера по скорости звука возможно вычислить пройденное расстояние звуковой волны. Расстояние объекта приблизительно половина пройденного пути звуковой волны. Рисунок 4 –Принцип работы ультразвукового датчик расстояния Ограничения, связанные с применением ультразвукового датчик расстояния : 1. Частичные отражения, или как их называют паразитный эхо-сигнал, могут исказить результаты измерений (причиной могут стать криволинейные или наклонные по отношению к направлению излучения сигнала поверхности).
Частота звуковой волны находится в пределах частоты ультразвука, что обеспечивает концентрированное направление звуковой волны, так как звук с высокой частотой рассеивается в окружающей среде меньше. Типичный ультразвуковой датчик расстояния состоит из двух мембран, одна из которых генерирует звук, а другая регистрирует отображенное эхо. Образно говоря, мы имеем дело со звуковой колонкой и микрофоном. Звуковой генератор создает маленький, с некоторым периодом ультразвуковой импульс и запускает таймер. Рисунок 3 – Ультразвуковой датчик расстояния HC-SR04 Вторая мембрана регистрирует прибытие отображенного импульса и останавливает таймер. От времени таймера по скорости звука возможно вычислить пройденное расстояние звуковой волны. Расстояние объекта приблизительно половина пройденного пути звуковой волны. Рисунок 4 –Принцип работы ультразвукового датчик расстояния Ограничения, связанные с применением ультразвукового датчик расстояния : 1. Частичные отражения, или как их называют паразитный эхо-сигнал, могут исказить результаты измерений (причиной могут стать криволинейные или наклонные по отношению к направлению излучения сигнала поверхности). 2. Измерения объектов из звукопоглощающих, изоляционных материалов или имеющих тканевую (шерстяную) поверхность могут привести к неправильным измерениям вследствие поглощения (ослабления) сигнала. 3. Чем меньше объект, тем меньшую отражающую поверхность он имеет. Это приводит к более слабому отраженному сигналу. 4. При высокой влажности (дождь, снег) сигнал также может частично отражаться от капель (снежинок), что приводит к паразитному эхо- сигналу.
2. Измерения объектов из звукопоглощающих, изоляционных материалов или имеющих тканевую (шерстяную) поверхность могут привести к неправильным измерениям вследствие поглощения (ослабления) сигнала. 3. Чем меньше объект, тем меньшую отражающую поверхность он имеет. Это приводит к более слабому отраженному сигналу. 4. При высокой влажности (дождь, снег) сигнал также может частично отражаться от капель (снежинок), что приводит к паразитному эхо- сигналу.
Принцип работы датчика следующий: один из пьезоэлементов излучает ультразвуковую волну при подачи импульса длительностью 15 микросекунд, а другой пьезоэлемент принимает эту же отражённую волну от препятствия. Затем замеряется время задержки от передачи до приёма волны, далее вычисляется расстояние и передаётся сигнал на ногу Echo датчика, длительностью пропорциональной расстоянию до препятствия. Нам остаётся только подавать импульс на датчик, принять его и вычислить расстояние. Сегодня мы научимся работать с HC-SR04 на BASCOM-AVR.
Поставим перед собой задачу: собрать устройство, которое должно замерять расстояние до какого либо объекта с помощью датчика HC-SR04 и передавать данные через UART на ПК.
Для этой цели можно использовать практически любой AVR микроконтроллер, так как алгоритм очень простой. Я взял Atmega8, в итоге получилась следующая принципиальная схема устройства:
Описание принципа работы ультразвукового дальномера HC—SR04 можно разделить на следующие шаги:
Следующий импульс может быть излучён, только после исчезновения эха от предыдущего. Это время называется периодом цикла (cycle period). Рекомендованный период между импульсами должен быть не менее 50 мс.
Если на сигнальный пин (Trig) подаётся импульс длительностью 10 мкс, то ультразвуковой модуль будет излучать восемь пачек ультразвукового сигнала с частотой 40кГц и обнаруживать их эхо. Измеренное расстояние до объекта пропорционально ширине эха (Echo) и может быть рассчитано по формуле, приведённой на графике выше.
Датчик отправляет ультразвуковые импульсы и слушает эхо. На вход Trig датчика подаем импульс высокого уровня длительностью 10–15 микросекунд. Датчик отправляет ультразвуковой сигнал «chirp» из восьми коротких импульсов частотой выше предела диапазон слуха человека. Электроника датчика знает скорость звука в воздухе. Измеряя время между отправленным и принятым ультразвуком, ультразвуковой датчик HC-SR04 формирует выходной сигнал. Этот принцип эхолокации используют дельфины и летучие мыши. Спустя примерно микросекунду ультразвуковой датчик HC-SR04 выдает на выходе Echo импульс высокого уровня длительностью до 38 миллисекунд. Если препятствий не обнаружено, то на выходе будет сигнал с длительностью 38 мс. Таким образом, для работы с датчиком от электроники прибора требуется один цифровой управляющий выход и один вход для сигнала датчика. Длина импульса на выходе Echo пропорциональна расстоянию до препятствия. Расстояние вычисляется по формуле: S=F/58, где S – расстояние в сантиметрах, F – продолжительность импульса в микросекундах. Для взаимодействия Arduino с датчиком есть программная библиотека Ultrasonic.
На вход Trig датчика подаем импульс высокого уровня длительностью 10–15 микросекунд. Датчик отправляет ультразвуковой сигнал «chirp» из восьми коротких импульсов частотой выше предела диапазон слуха человека. Электроника датчика знает скорость звука в воздухе. Измеряя время между отправленным и принятым ультразвуком, ультразвуковой датчик HC-SR04 формирует выходной сигнал. Этот принцип эхолокации используют дельфины и летучие мыши. Спустя примерно микросекунду ультразвуковой датчик HC-SR04 выдает на выходе Echo импульс высокого уровня длительностью до 38 миллисекунд. Если препятствий не обнаружено, то на выходе будет сигнал с длительностью 38 мс. Таким образом, для работы с датчиком от электроники прибора требуется один цифровой управляющий выход и один вход для сигнала датчика. Длина импульса на выходе Echo пропорциональна расстоянию до препятствия. Расстояние вычисляется по формуле: S=F/58, где S – расстояние в сантиметрах, F – продолжительность импульса в микросекундах. Для взаимодействия Arduino с датчиком есть программная библиотека Ultrasonic.
Шаг 1: На вход Trig подаётся импульс длительностью 10 микроСекунд. Для дальномера это команда начать измерение расстояния перед ним.
Шаг 2: Устройство генерирует 8 ультразвуковых импульсов с частотой 40 кГц через выходной сенсор T.
Шаг 3: Звуковая волна отражается от препятствия и попадает на принимающий сенсор R.
Шаг 4: На выходе Echo формируется импульс, длительность которого прямо пропорциональна измеренному расстоянию.
Шаг 5: На стороне управляющего контроллера переводим длительность импульса Echo в расстояние по формуле: ширина импульса(мкс) / 58 = дистанция (см).
Ниже на рисунке приведены временные диаграммы, наглядно поясняющие перечисленные шаги.
На сигнал Trig нужно подавать короткие импульсы длительностью 10мкс. Этот импульс запускает эхо-локатор. Он уже сам генерирует пачку ультразвуковых импульсов (40кГц) для излучателя и сам ловит отраженное эхо. По времени распространения звука туда и назад датчик определяет расстояние. Нам же сам датчик на контакт Echo выдает импульс с длительностью пропорциональной расстоянию. Длительность сигнала Echo от 150мкс до 25мс. Если ответа нет, то длительность Echo около 40мс. Расстояние до объекта можно вычислить разделив длительность в микросекундах эха на 58. Получаются расстояние в сантиметрах. Максимальное расстояние, которое можно мерить судя по документации — 5 метров.
Рекомендуемый период опроса датчика 50-10мс. Диаграмма направленности датчика не очень острая — примерно градусов под тридцать.
- Действие ультразвукового дальномера HC-SR04 основано на принципе эхолокации. Он излучает звуковые импульсы в пространство и принимает отражённый от препятствия сигнал.
 По времени распространения звуковой волны к препятствию и обратно определяется расстояние до объекта.
По времени распространения звуковой волны к препятствию и обратно определяется расстояние до объекта.
Запуск звуковой волны начинается с подачи положительного импульса длительностью не менее 10 микросекунд на ножку TRIG дальномера. Как только импульс заканчивается, дальномер излучает в пространство перед собой пачку звуковых импульсов частотой 40 кГц. В это же время запускается алгоритм определения времени задержки отражённого сигнала, а на ножке ECHO дальномера появляется логическая единица. Как только датчик улавливает отражённый сигнал, на выводе ECHO появляется логический ноль. По длительности этого сигнала («Задержка эхо» на рисунке) определяется расстояние до объекта.
Диапазон измерения расстояния дальномера HC-SR04 — до 4 метров с разрешением 0,3 см. Угол наблюдения — 30 градусов, эффективный угол — 15 градусов. Ток потребления в режиме ожидания 2 мА, при работе — 15 мА. - Запуск звуковой волны начинается с подачи положительного импульса длительностью не менее 10 микросекунд на ножку TRIG дальномера.
 Как только импульс заканчивается, дальномер излучает в пространство перед собой пачку звуковых импульсов частотой 40 кГц. В это же время запускается алгоритм определения времени задержки отражённого сигнала, а на ножке ECHO дальномера появляется логическая единица. Как только датчик улавливает отражённый сигнал, на выводе ECHO появляется логический ноль. По длительности этого сигнала («Задержка эхо» на рисунке) определяется расстояние до объекта.
Как только импульс заканчивается, дальномер излучает в пространство перед собой пачку звуковых импульсов частотой 40 кГц. В это же время запускается алгоритм определения времени задержки отражённого сигнала, а на ножке ECHO дальномера появляется логическая единица. Как только датчик улавливает отражённый сигнал, на выводе ECHO появляется логический ноль. По длительности этого сигнала («Задержка эхо» на рисунке) определяется расстояние до объекта.
Диапазон измерения расстояния дальномера HC-SR04 — до 4 метров с разрешением 0,3 см. Угол наблюдения — 30 градусов, эффективный угол — 15 градусов. Ток потребления в режиме ожидания 2 мА, при работе — 15 мА.
Рис. 40. Пьезоэлектрический ультразвуковой преобразователь: А — входное напряжение приводит к изгибу элемента, что вызывает генерацию ультразвуковых волн. И наоборот, в результате воздействия волн на выходе преобразователя появляется напряжение; Б — ультразвуковой преобразователь с открытой апертурой для работы в воздухе
- Подробнее: https://www.
 kakprosto.ru/kak-918792-kak-podklyuchit-ultrazvukovoy-dalnomer-hc-sr04-k-arduino#ixzz4PeP45Mxx
kakprosto.ru/kak-918792-kak-podklyuchit-ultrazvukovoy-dalnomer-hc-sr04-k-arduino#ixzz4PeP45Mxx - Контакты, по порядку слева направо, с лицевой стороны:
- Vcc – питание 5В
- Trig – вход
- Echo – выход
- Gnd –земля
Процесс работы:
- Подключаем датчик к питанию и к управляющему устройству
- Посылаем на вход дальномера (Trig) сигнал длительностью 10мкс (или чуть больше, он срабатывает с 10мкс)
- Динамик датчика издает 8 сигналов частотой 40кГц, и микрофон получает их эхо (или не получает)
- Датчик подает на свой выход (Echo) сигнал длительностью соответствующей расстоянию до препятствия: 150мкс (при 2см до препятствия) – 25мс (при 4м до препятствия) и 38мс при отсутствии преграды. На заметку: звук проходит расстояние 4см (2см от динамика до препятствия и 2см обратно до микрофона) за 0.04м / 335м/с = 0,000119с=119мкс и 8м за 8м / 335м/с = 0,023881с = 23,881мс.
Какое время проходит от срабатывания датчика по входному сигналу до начала пункта 3 и от начала пункта 3 до начала пункта 4 нигде не сказано – это скоро будет выяснено мной опытным путём.
Для расчета расстояния до препятствия используются следующие формулы:
- Длина выходного импульса в микросекундах / 58 = расстояние в сантиметрах
- Длина выходного импульса в микросекундах / 148 = расстояние в дюймах
Схема модуля HC-SR04 имеет 2 преобразователя ультрозвуковых сигналов в электрические сигналы малой мощности, один TCT40-16T — (T — Transmiter на схеме обозначен как Emit MK2 смотри схему) предназначен для передачи (эмиссии) ультразвуковых волн в окружаюшее пространство а второй TCT40-16R (R — Receive на схеме обозначен как Receive MK1 смотри схему) для приема отраженных ультрозвуковых волн от предметов окружающего мира.
Для передачи ультразвуковых волн требуется относительно высокое напряжение. Микросхема MAX232 (обозначение на плате — U3 смотри схему) усиливает 5 вольт входного питающего напряжения до +/- 9-10 вольт. Микросхема MAX232 подключается между двумя выходами ( T OUT1 — вывод 14 и T OUT2 вывод 7 смотри схему) , так что на самом деле амплитуда значения напряжения импульсов подающихся на ультрозвуковой передатчик достигает до 20 вольт. Питание подается на микросхему MAX232 через транзистор Q2 (в новой схеме отсутствует и питание подается напрямую на вход 16 микросхемы и в этом случае отключения микроконтроллером не происходит) некоторое время до и во время излучения импульса , так как внутреннее переключение заряда создает избыточный шум на приемной стороне модуля. Когда модуль переходит в режим приема на микросхеме MAX232 отключается питание выходом 10 — Signal микроконтроллера EM78P153S (EM78P153S китайский микроконтроллер работает на частоте < 27 МГц .
Микросхема MAX232 подключается между двумя выходами ( T OUT1 — вывод 14 и T OUT2 вывод 7 смотри схему) , так что на самом деле амплитуда значения напряжения импульсов подающихся на ультрозвуковой передатчик достигает до 20 вольт. Питание подается на микросхему MAX232 через транзистор Q2 (в новой схеме отсутствует и питание подается напрямую на вход 16 микросхемы и в этом случае отключения микроконтроллером не происходит) некоторое время до и во время излучения импульса , так как внутреннее переключение заряда создает избыточный шум на приемной стороне модуля. Когда модуль переходит в режим приема на микросхеме MAX232 отключается питание выходом 10 — Signal микроконтроллера EM78P153S (EM78P153S китайский микроконтроллер работает на частоте < 27 МГц .
Прием и выделение электрических импульсов поступающих с преобразователя ультразвуковых сигналов TCT40-16R осуществляется микросхемой LM324 (обозначение на плате — U1 смотри схему) , который содержит 4 операционных усилителя. Операционный усилитель U2D (смотри схему) усиливает сигнал в 6 раз. Операционный усилитель U2C имея обратную связь (1 — го порядка) является полосовым фильтром , затем операционный усилитель U2B усиливает входной сигнал еще 8 раз. Последний операционный усилитель U2A используется вместе с Q1 в качестве гистерезиса компаратора где происходит выделение прямоугольных импульсов и аналогового входного сигнала. Я моделировал фильтр в PSpice и не центрирована 40KHz , как это должно быть , но вместо этого он имеет пик 18kHz. Изменяя только два резистора (R13 до 2K2 и R11 до 18К) отклик фильтра смещается на частоту пульса , и это значительно повышает чувствительность обнаружения.
Операционный усилитель U2D (смотри схему) усиливает сигнал в 6 раз. Операционный усилитель U2C имея обратную связь (1 — го порядка) является полосовым фильтром , затем операционный усилитель U2B усиливает входной сигнал еще 8 раз. Последний операционный усилитель U2A используется вместе с Q1 в качестве гистерезиса компаратора где происходит выделение прямоугольных импульсов и аналогового входного сигнала. Я моделировал фильтр в PSpice и не центрирована 40KHz , как это должно быть , но вместо этого он имеет пик 18kHz. Изменяя только два резистора (R13 до 2K2 и R11 до 18К) отклик фильтра смещается на частоту пульса , и это значительно повышает чувствительность обнаружения.
МИКРОКОНТРОЛЛЕР ESP-8266 И УЛЬТРАЗВУКОВОЙ ДАТЧИК HC-SR04
Переделка ультразвукового датчика HC-SR04
Рис. 4 Ультразвуковой излучатель/приемник TCT40-16R/T (стоимость вместе с внутренним микроконтроллером и микросхемами усиления сигнала < $1 )
Рис. 5 Пространственная диаграмма излучения ультразвукового излучателя/приемника TCT40-16R/T (если бы мы видели ультразвук, то так бы мы видели распространение ультразвуковых волн в пространстве)
Характеристики ультразвукового излучателя/приемника TCT40-16R/T
1. Model: TCT40-16R/T (16 мм в диаметре)
Model: TCT40-16R/T (16 мм в диаметре)
2. Номинальная частота (Кгц): 40 КГц
3. Излучение At10v звукового давления (дб = 0.02mPa): ≥ 117dB
4. чувствительность Приемника at40KHz (дб = V/ubar): ≥-65dB
5. Электростатический потенциал at1KHz, < 1 В (PF): 2000 ± 30%
Ультразвуковые преобразователи справка 1
Ультразвуковые преобразователи справка 2
ПРИМЕНЕНИЕ
Эхолот. Рубрика «Как это работает?»
Ультразвуковые датчики Murata
Датчики, предназначенные для автоматов парковки, имеют высокую чувствительность: при резонансной частоте, равной 40 кГц. Дальность действия датчика достигает 1,5 метров при разрешающей способности 9 мм. Выпускаются датчики с различной диаграммой направленности, как симметричной (круговой), так и не симметричной (овальной).
Выпускаются датчики с различной диаграммой направленности, как симметричной (круговой), так и не симметричной (овальной).
Подключение к Arduino
Если вы планируете использовать ультразвуковой дальномер HC-SR04 с Arduino вы можете воспользоваться существующими библиотеками:
- Ultrasonic — самая популярная библиотека для HC-SR04.
- NewPing — отличается большей точностью и скоростью работы.
- Ультразвуковой дальномер URM37
Распиновка:
- Vcc — положительный вывод питания
- TRIG — вход TRIG
- ECHO — выход ECHO
- GND — ноль питания
На выводы питания подается постоянное напряжение 5 В, потребляемый ток в рабочем режиме около 15 мА.
Вход TRIG подключается к любому выводу микроконтроллера. На этот вывод нужно подавать импульсный цифровой сигнал длительностью 10 мкс. По сигналу на входе TRIG датчик посылает ультразвуковые импульсы.
После приема отраженного сигнала, датчик формирует на выводе ECHO импульсный сигнал, длительность которого пропорционально расстоянию до преграды.
Контакты датчика можно соединить с макетной платой или Arduinoпроводами «мама-папа». А с Troyka Shield через провода «мама-мама».
- Гаражный парктроник
Этот дальномер может служить прекрасным датчиком для робота, благодаря которому он сможет определять расстояния до объектов, объезжать препятствия, или строить карту помещения. Его можно также использовать в качестве датчика для сигнализации, срабатывающего при приближении объектов.
Технические характеристики
https://www.yourmestudio.com/rcw-0002-ultrasonic-ranging-module-p717.html
- Напряжение питание: 5 В
- Потребление в режиме тишины: 2 мА
- Потребление при работе: 15 мА
- Диапазон расстояний: 2–400 см
- Эффективный угол наблюдения: 15°
- Рабочий угол наблюдения: 30°
Описание продукта:
ТК T 40-16 т/r 1
-
(Tc): piezoceramics Ультразвуковой датчик
-
(T): Категория t-общность
-
(40): Центральная частота (кгц)
-
(16): наружный диаметр? (мм)
-
(T): использование режим: излучатель; r-приемник; tr-совместимость излучатель и приемник
-
(1): ID — 1,2, 3…
Тестирования цепи
- 1 синусоидальный генератор 1 охватил сигнала Генератор
- 2 cymometer 2 Частотомер
- 3 стандартных динамик 3 вольтметр
- 4 Получить модель датчика 4 излучают модель датчика
- 5 осциллографа 5 Стандартный микрофон
- 6 аудио частотные характеристики Дисплей прибора
Производительность продукта
1). Номинальная частота (кГц): 40 кГц
Номинальная частота (кГц): 40 кГц
2). излучать звук pressureat10V (= 0.02Mpa):? 117dB
3). Прием Чувствительность приемника at40KHz (дБ = v/ubar):?-65dB
4). Электростатический потенциал at1KHz, <1 В (PF): 2000 +/-30%
5). Диапазон обнаружения (м): 0.2 ~ 20
6).-6дБ угол направления: 80o
7). Обшивка материал: алюминий
8). Обшивка ЦВЕТ: серебристый
Полезные ресурсы:
Ультразвуковой дальномер HC-SR04 подключение к Arduino
Ультразвуковой датчик HC-SR04 – дальномер на микроконтроллере
https://www.elecfreaks.com/store/download/product/Sensor/HC-SR04/HC-SR04_Ultrasonic_Module_User_Guide.pdf
https://robocraft.ru/blog/arduino/770.html
Ультразвуковой датчик измерения расстояния HC-SR04
Pengetahuan Dasar Таймер Untuk Pengukuran Jarak Dengan Ультразвуковой
Запуск сервопривода с помощью датчика расстояния HC-SR04 и Arduino
https://robocraft.ru/blog/electronics/772.html
Raspi-отстойника в октябре 2014 Embedded Выпуск LinuxJournal
https://www. arduino.cc/en/Tutorial/Ping
arduino.cc/en/Tutorial/Ping
Простой искатель ультразвуковой диапазон с помощью HC-SR04
Датчик Препятствие с помощью Arduino и HCSR04
Как проверить DYP-ME007 Ультразвуковой дальномер с использованием NE555 и мультиметра
https://macduino.blogspot.ru/2013/11/HC-SR04-part1.html
https://amperka.ru/product/ultrasonic-urm37
https://image.dfrobot.com/image/data/SEN0002/URM04V2.0Mannual1.1.pdf
https://people.ece.cornell.edu/land/courses/ece4760/FinalProjects/s2012/xz227_gm348/xz227_gm348/URM3.2_Mannual_Rev2.pdf
RCW-0012 Ультразвуковой Модуль Расстояние Измерительный Преобразователь Тест Модуля Индикации
https://www.farnell.com/datasheets/81163.pdf?_ga=1.169892256.1853603956.1478607467
https://chinaultrasound.en.alibaba.com/product/60268805778-800581237/40Khz_TCT40_16R_T_Air_Ultrasonic_Ceramic_Transducer_Ultrasonic_Sensor.html
Использование ультразвукового дальномера
Импульсные ультразвуковые сонары открытого типа
Ultrasonic Sonar Ranging IC — PW0268
Miniature Tuning Fork Quartz Crystals
Sonar Ranging Module SRM400
Высокочастотный линейный датчик Philips eL18-4
Универсальный высокочастотный линейный матричный датчик Philips eL18-4 для комплекса ультразвуковых исследований
Инновационный датчик eL18-4 работает в частотном диапазоне 2-22МГц, что открывает широкий спектр возможностей его применения в ультразвуковой диагностике. Универсальность датчика позволяет использовать его для комплекса ультразвуковых исследований в таких областях, как: молочная железа (с функцией эластографии сдвиговой волной), поверхностные органы (с функцией эластографии сдвиговой волной), опорно-двигательный аппарат, исследования сосудов (с автоматическим измерением толщины сосудистой стенки), органы брюшной полости, исследования в педиатрии, пренатальная диагностика.
Акушерство
Начало новой жизни — это всегда особое время! Ультразвуковые решения Philips в области акушерства разработаны для того, чтобы позволить врачам сосредоточиться на здоровье каждой будущей мамы.
Разработанные для обеспечения клиницистов дополнительной информацией ультразвуковые решения Philips позволяют получать не только детальную визуализацию анатомии плода уже в первом триместре, но и помогают оптимизировать рабочий процесс врача.
Применение eL18-4 в I триместре беременности
Сегодня ультразвуковая диагностика используется для выявления генетических аномалий, внутриутробных пороков, оценки жизнеспособности плода и определения срока беременности, как наиболее эффективный метод. Ультразвуковое исследование плода в первом триместре (до 13 недель 6 дней беременности включительно) является наиболее точным методом.
В течение многих десятилетий трансвагинальный метод ультразвукового исследования был «золотым стандартом» диагностики в акушерстве. Сегодня линейный матричный датчик может стать альтернативой общепринятому трансвагинальному методу оценки состояния плода и репродуктивных органов женщины.
Сегодня линейный матричный датчик может стать альтернативой общепринятому трансвагинальному методу оценки состояния плода и репродуктивных органов женщины.
Для скрининга в первом триместре линейный датчик eL18-4 является оптимальным аналогом вагинального датчика, в сравнении с которым линейный eL18-4 обладает следующими преимуществами:
- Основанное на параллельно излучаемых eL18-4 ультразвуковых волнах изображение имеет большую разрешающую способность на глубине, чем полученное с помощью полостных датчиков.
- Применение линейного датчика более комфортно для пациентки и требует меньшего времени на проведение исследования.
Детальная анатомия плода и ранняя диагностика пороков в I триместре
Ультразвуковое исследование является основным методом визуализации для оценки врожденных аномалий плода.
Линейный матричный датчик eL18-4 позволяет получить детальную информацию об анатомии плода и выявить пороки на ранней стадии развития. Сверхширокополосная PureWave матрица датчика генерирует частоты в диапазоне 2-22 МГц, что формирует одинаково высокоинформативные, четкие изображения по всей глубине сканирования до 14 см.
Сверхширокополосная PureWave матрица датчика генерирует частоты в диапазоне 2-22 МГц, что формирует одинаково высокоинформативные, четкие изображения по всей глубине сканирования до 14 см.
Новый линейный матричный датчик eL18-4
+
Протокол сканирования плода в первом триместре
=
Детальная анатомия плода и ранняя диагностика пороков
Высокочастотный датчик Philips eL18-4 содержит решетку из 1920 активных монокристаллических пьезоэлементов, выполненных по усовершенствованной технологии PureWave. Это обеспечивает высокодетальную 2D визуализацию, которая в совокупности с глубиной сканирования необходима для уверенной диагностики в акушерстве.
51.0 KB
44.0 KB
37.0 KB
В случае аномалий позвоночника, оценка ануса важна, чтобы исключить аноректальные пороки развития, которые могут быть частью более широкой группы аномалий, известных как VACTERL (аномалии позвоночника, атрезия ануса, пороки сердца, трахеопищеводный свищ, аномалии почек, дефекты лучевой кости). Исследования в США показали, что очень высокое качество изображений еL18-4 повышают уверенность клиницистов в исключении аноректальной аномалии плода.
Исследования в США показали, что очень высокое качество изображений еL18-4 повышают уверенность клиницистов в исключении аноректальной аномалии плода.
Точная оценка состояния плаценты важна при определении сроков родоразрешения, а также при планировании хирургических вмешательств. Изображения показывают нормальный миометрий и четкую границу с плацентой. С визуализацией микрокровотока (MFI) хорошо представлены дугообразные артерии матери, спиральные артерии, а также ветвящиеся ворсинчатые артерии, что подтверждает нормально развитую сосудистую систему.
Клинические исследования, проведенные экспертами детской больницы штата Аризона (США) во главе с Д-ром Льюсом Гонкалвсом с целью определения наличия нормальной сосудистой структуры плаценты при подозрении на ее патологию, показали, что инновационная технология сверхширокополосной PureWave матрицы датчика eL18-4 способна изменить привычный способ, которым врачи интерпретируют нормальный и аномальный сосудистый поток в плаценте.
Клинические изображения
- Переключить вид
/
Product images
Ультразвуковые датчики. Устройство и работа. Особенности
Сенсорные устройства, преобразующие электрический ток в волны ультразвука, называются ультразвуковые датчики. Их принцип действия аналогичен работе радара, они улавливают цель по отраженному сигналу. Скорость звука – величина постоянная. На основании этого таким датчиком вычисляется расстояние до некоторого объекта, соответствующее диапазону времени между выходом сигнала и его возвращением.
Работают ультразвуковые датчики основываясь на взаимодействии колебаний ультразвука с измеряемым пространством. Ультразвуковые колебания – это механические колебания, которые совершаются с частотой выше 20000 герц, а значит, больше верхней границы колебаний звука, воспринимаемого человеком.

Распространение таких колебаний в газообразных, жидких и твердых средах зависит от параметров самой среды. Скорость передачи колебаний для газов равна 200-1300 метров в секунду, для твердых тел 1500-8000 м/с, для жидких веществ 1100-2000 м/с. Значительно зависит скорость колебаний от давления газа.
Коэффициенты отражения волн ультразвука отличаются на границах различных сред, так же как и их способность поглощения звука. Поэтому ультразвуковые датчики используют для получения информации о разных неэлектрических параметрах с помощью измерения свойств колебаний ультразвука: сдвига фаз, времени затухания, распространения колебаний.
Ультразвуковые способы измерения являются электрическими, так как возбуждение колебаний и их прием осуществляется с помощью электричества. Чаще всего в датчиках применяют пьезоэлементы, преобразователи магнитострикционного вида. Для возбуждения колебаний ультразвуковой частоты применяется эффект растяжения и сжатия пьезокристалла, называемый обратным пьезоэффектом. Поэтому пьезоэлемент применяется как в качестве приемника колебаний, так и в качестве излучателя.
Поэтому пьезоэлемент применяется как в качестве приемника колебаний, так и в качестве излучателя.
Излучатели магнитострикционного вида применяют эффект деформации ферромагнитов в магнитном поле. Излучатель стержневого вида выполнен в виде тонких листов ферромагнетика, на котором намотана катушка возбуждения.
В магнитострикционных излучателях часто применяются сплавы никеля, ферриты. При нахождении ферромагнитного стержня в переменном магнитном поле, он будет разжиматься, и сжиматься с частотой поля. На рисунке показана зависимость изменения (относительного) длины стержня от напряженности поля Н. Так как направление поля не влияет на знак деформации, то частота деформации будет в 2 раза выше частоты возбуждающего поля.
Чтобы получить значительные механические деформации применяют подмагничивание стержня. Магнитострикционные излучатели действуют в условиях резонанса, если частота поля возбуждения совпадает с колебаниями стержня, определяемыми по формуле:
Где
l — длина стержня, Е — модуль упругости, р — плотность.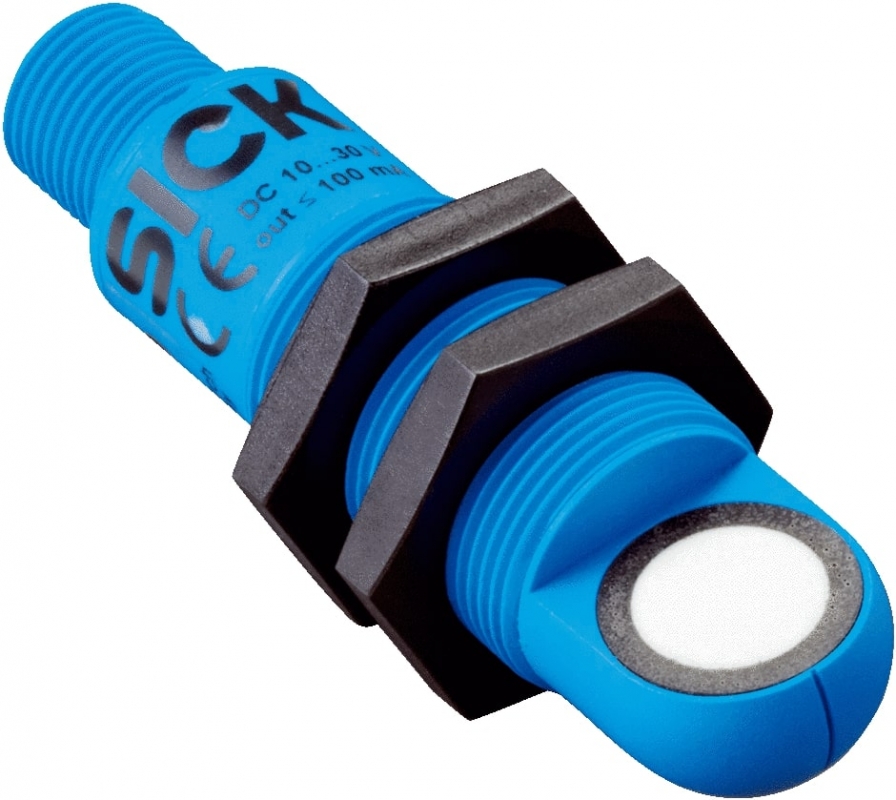
В излучателе на основе пьезоэлемента применяется кварцевая пластина, к которой подключено переменное напряжение Uх, образующее электрическое поле по оси Х.
Обратный эффект состоит в деформации пластины по оси Х. Относительное изменение размера пластины (толщины) равно:
Δa/a=kUx/a
Поперечный эффект состоит в деформации пластины по оси У. Относительное изменение толщины пластины равно:
Δl/l=kUx/a
Размеры пластины не влияют на величину продольной деформации. Поперечная деформация повышается с увеличением отношения l/а. При разности потенциалов до 2500 вольт имеется прямая зависимость деформации и напряжения. При высоких напряжениях деформация повышается не так интенсивно. Амплитуда колебаний доходит до наибольшего значения, когда частота напряжения и частота колебаний пластины совпадают.
Частота продольных колебаний вычисляется:
Модуль упругости определяется по оси Х. Модуль упругости по оси У влияет на частоту поперечных колебаний:
Если сравнить два рассмотренных типа излучателей, то можно сделать вывод, что пьезоэлектрические излучатели могут обеспечить большую частоту колебаний ультразвука.
Рассмотрим работу датчика по времени прохождения сигнала. Обработка отраженного сигнала осуществляется в той же точке, откуда и излучается. Такой метод является непосредственным обнаружением.
Рис 1
Ультразвуковые датчики в момент времени Т0 излучают сигнал (некоторый набор импульсов) длительностью ∆t, распространяющийся в среде со звуковой скоростью С. При достижении объекта сигналом, часть его отражается и возвращается в приемник за время Т1. Схема электронного устройства, предназначенная для обработки сигнала, определяет расстояние, вычисляя время Т1 — Т0.
Для определения расстояния может использоваться схема с одной или двумя головками датчика. В случае с двумя головками, одна из них излучает сигнал, а вторая принимает отраженный сигнал.
Ультразвуковые датчики с одной головкойЭта схема обладает значительным недостатком, который заключается в том, что после выдачи сигнала необходимо время для успокоения мембраны для дальнейшей работы на прием отраженного сигнала. Этот период времени называют «мертвым» временем.
Этот период времени называют «мертвым» временем.
Мертвое время вынуждает ультразвуковые датчики работать в «слепой зоне». Другими словами, когда объект расположен очень близко, то отраженный сигнал возвращается в измерительную головку настолько быстро, что она еще не перестроилась на работу приема, вследствие чего объект не обнаруживается.
Рис 2
Продолжительность процессов перехода от излучателя до приемника зависит от различных факторов, которыми являются: особенности устройства датчика, материал изготовления, внутреннее затухание, общая колеблющаяся масса.
На рисунке 2 изображена схема функционирования датчика непосредственного обнаружения. С помощью импульса запуска схема возбуждения излучателя становится активной. Она формирует некоторый набор импульсов. Тем же импульсом запуска производится блокировка входа усилителя приемника. При отключении излучателя происходит разблокировка приемника.
Восстановление приемника происходит около 300 мкс. Это намного меньше времени успокоения излучателя. Вследствие этого параметры приемника не оказывают влияния на размер слепой зоны.
Это намного меньше времени успокоения излучателя. Вследствие этого параметры приемника не оказывают влияния на размер слепой зоны.
При нахождении объекта с необходимой способностью отражения в контролируемой зоне, отраженный сигнал возбуждает на мембране переменное напряжение высокой частоты, которое обрабатывается методами обнаружения сигналов аналогового типа: усиливается, ограничивается, приходит на компаратор.
Это напряжение превышает заданное значение порога обнаружения, что является сигналом того, что объект находится в контролируемой зоне. Схема электронного устройства фиксирует промежуток времени, который прошел с момента активации излучателя и создает на выходе электрический сигнал. Длина этого сигнала зависит от размера этого интервала времени, и передается на цифровой индикатор.
Схема управления после регистрации первого сигнала отражения задерживает создание следующего пускового импульса. При этом она ожидает вероятного прихода отраженного сигнала от наиболее удаленных объектов в контролируемой зоне.
Существенно сократить слепую зону можно путем использования двух разных головок датчика для приемника и излучателя. При этом необходимо создать наибольшую чувствительность схемы правильным выбором одинаковой частоты резонанса для приемника и излучателя.
Отслеживание порогаРазмер слепой зоны является важным параметром ультразвукового датчика, который определяет его успех применяемости. Поэтому изготовители стараются снизить эту величину разными способами.
Для таких целей применяют метод отслеживания порога обнаружения. На малых расстояниях в течение процесса перехода сигнал успевает много раз пройти путь между объектом и сенсором. Точность обнаружения значительно уменьшается вследствие искажений, которые вносит сигнал с многократным отражением. Погрешность этого метода возрастает с приближением к объекту.
Это заставляет найти компромисс между точностью измерения, ложной тревоги и чувствительностью обнаружения. На рисунке 3 показан способ отслеживания порога обнаружения.
На рисунке 3 показан способ отслеживания порога обнаружения.
Рис 3
Он заключается в том, что напряжение порога детектора, которое подается на компаратор, создается напряжением, изменяемым во времени и копирующим форму «хвоста» набора импульсов, получаемых во время затухания колебаний мембраны.
Проблема заключается в том, что детектору неизвестно какой по счету из отраженных сигналов превзошел границу порога обнаружения. По рисунку видно, что второй из отраженных сигналов оказался зарегистрированным. Это привело к определению расстояния величиной, превышающей действительную величину в два раза. Такую ситуацию нельзя допускать, поэтому датчики подлежат настройке, во избежание попадания объектов в слепую зону.
Примерные свойства ультразвуковых датчиков в зависимости от расстояния приводятся в таблице
Использование способа отслеживания границы чувствительности дало возможность снизить слепую зону в два раза. Но для применения датчиков возле слепой зоны необходима тщательная проработка. Поэтому в свойствах датчика по расстоянию кроме интервала зондирования приведен интервал настройки.
Поэтому в свойствах датчика по расстоянию кроме интервала зондирования приведен интервал настройки.
Интервал зондирования – это интервал расстояния обнаружения, который определяется только возможностями датчика в виде направленности и мощности луча, а также свойствами объекта.
Интервал настройки – это интервал расстояний, в котором можно регулировать датчик по месту для его наилучшего применения в конкретном случае. При этом необходимо учитывать расположение объекта относительно датчика и его свойства.
Ультразвуковые датчики для непосредственного обнаружения объекта выполняются со средствами, которые позволяют произвести плавную настройку дальней и ближней границы измерения.
Похожие темы:
- Ультразвуковые датчики (Часть 2). Типы и работа. Применение
- Емкостные датчики. Виды и устройство. Работа и применение
- Индуктивные датчики. Виды. Устройство. Параметры и применение
- Датчик утечки газа. Виды. Работа. Установка. Устройство. Применение
- Датчики влажности.
 Виды и работа. Применение и особенности
Виды и работа. Применение и особенности - Датчики Холла. Виды и применения. Работа и подключения
- Датчики давления. Виды и работа. Как выбрать и применение
- Датчики температуры. Виды и принцип действия, Как выбрать
- Тензометрические датчики (Тензодатчики). Виды и работа. Устройство
Ультразвуковые датчики | UM30 | SICK
- Главная
- Портфолио продуктов
- Датчики расстояния
- Ультразвуковые датчики
- UM30
- Главная
- Портфолио продуктов
- Датчики расстояния
- Ультразвуковые датчики
- UM30
обзор семейств продукции Русский Cesky Dansk Deutsch English Español Suomi Français Italiano 日本語 – Японский 한국어 – Корейский Nederlands Polski Portugues Svenska Türkçe Traditional Chinese Китайский
Универсальное средство решения задач
Преимущества
- Простая интеграция в установку за счёт компактной конструкции
- Возможность гибкой адаптации под требования того или иного случая применения благодаря многочисленным возможностям настройки и регулируемой чувствительности
- Надёжные результаты измерения, поскольку режим синхронизации и мультиплексирования предотвращает взаимное влияние датчиков
- Экономичное наблюдение за зоной благодаря синхронизации датчиков
- Офлайн-настройка параметров датчика через дисплей позволяет выполнять предварительную конфигурацию и экономит время при вводе установки в эксплуатацию
- Встроенная температурная компенсация для высокой точности измерения
- Режим ObSB обеспечивает возможность распознавания объектов между датчиком и запрограммированным фоном
Обзор
Универсальное средство решения задач
Датчики семейства UM30 убеждают высокой гибкостью своего применения. Разные диапазоны сканирования до 8000 мм и многочисленные возможности настройки не оставят без решения ни одну задачу. Высокая точность измерения благодаря встроенной температурной компенсации, независимое от цвета распознавание объектов, высокая стойкость к загрязнению и широкий диапазон рабочих температур (до +70 °C) гарантируют надёжную эксплуатацию даже в самых сложных условиях.
Разные диапазоны сканирования до 8000 мм и многочисленные возможности настройки не оставят без решения ни одну задачу. Высокая точность измерения благодаря встроенной температурной компенсации, независимое от цвета распознавание объектов, высокая стойкость к загрязнению и широкий диапазон рабочих температур (до +70 °C) гарантируют надёжную эксплуатацию даже в самых сложных условиях.
Краткий обзор
- Надёжное измерение независимо от цвета материалов, прозрачности объектов, бликов и внешнего освещения
- Диапазон сканирования до 8000 мм
- Дисплей для быстрой и удобной настройки датчика
- Невосприимчив к грязи, пыли, влаге и туману
- Разнообразный выбор интерфейсов, включая IO-Link
- Регулируемая чувствительность
Преимущества
Практически неограниченное использование — независимо от цвета, блеска и прозрачности
Ультразвуковые датчики SICK измеряют и обнаруживают цветные, блестящие или прозрачные поверхности, что считается особенно сложным для оптических датчиков, в самых разных сферах применения. Даже неблагоприятные условия окружающей среды, такие как пыль, грязь или туман, практически не влияют на результат измерения. Более того, широкая зона обнаружения позволяет контролировать большое поле с помощью всего лишь одного датчика — и это при диапазоне измерения от 13 мм до 8 м. Неважно где: ультразвуковые датчики SICK можно найти в любой отрасли. Обширный ассортимент предлагает вам широкий спектр решений для вашего случая применения. Убедитесь сами.
Даже неблагоприятные условия окружающей среды, такие как пыль, грязь или туман, практически не влияют на результат измерения. Более того, широкая зона обнаружения позволяет контролировать большое поле с помощью всего лишь одного датчика — и это при диапазоне измерения от 13 мм до 8 м. Неважно где: ультразвуковые датчики SICK можно найти в любой отрасли. Обширный ассортимент предлагает вам широкий спектр решений для вашего случая применения. Убедитесь сами.
Узнайте больше о принципе функционирования ультразвуковых датчиков.
Измерение времени прохождения (звука)Датчик излучает звуковой импульс, который отражается обнаруживаемым объектом. Время, которое необходимо импульсу для прохождения от датчика до объекта и в обратном направлении, измеряется, оценивается и преобразуется в расстояние следующим образом.
Расстояние = скорость звука x общее время прохождения звука (t2) / 2
Диапазоны срабатывания ультразвуковых датчиков В целом, к ультразвуковым датчикам применимо следующее: чем меньше звука поглощает измеряемый объект, тем больше возможный диапазон срабатывания. Рабочий диапазон срабатывания указывает расстояние, на котором возможно измерение обычных объектов с достаточным функциональным резервом. В идеальных условиях датчик может использоваться даже в предельном диапазоне. Коммутационные поля используются для идеальной оценки возможностей приложения. Тёмно-синяя область, отображаемая в этих коммутационных полях, показывает пример рабочего диапазона датчика при обнаружении круглого стержня. Светло-синяя область демонстрирует максимальную зону обнаружения (предельный диапазон срабатывания), которая должна быть достигнута в идеальных условиях с легко распознаваемыми объектами, здесь в качестве примера — выровненная пластина. Во избежание непреднамеренного обнаружения объектов в ближайшем окружении эта зона между датчиком и объектом измерения должна быть свободной. Обнаруживаемость и зона обнаружения объекта зависят от его отражающих свойств, размера и ориентации. В зависимости от применения датчик может распознавать в том числе и очень мелкие объекты, например, металлическую проволоку.
Рабочий диапазон срабатывания указывает расстояние, на котором возможно измерение обычных объектов с достаточным функциональным резервом. В идеальных условиях датчик может использоваться даже в предельном диапазоне. Коммутационные поля используются для идеальной оценки возможностей приложения. Тёмно-синяя область, отображаемая в этих коммутационных полях, показывает пример рабочего диапазона датчика при обнаружении круглого стержня. Светло-синяя область демонстрирует максимальную зону обнаружения (предельный диапазон срабатывания), которая должна быть достигнута в идеальных условиях с легко распознаваемыми объектами, здесь в качестве примера — выровненная пластина. Во избежание непреднамеренного обнаружения объектов в ближайшем окружении эта зона между датчиком и объектом измерения должна быть свободной. Обнаруживаемость и зона обнаружения объекта зависят от его отражающих свойств, размера и ориентации. В зависимости от применения датчик может распознавать в том числе и очень мелкие объекты, например, металлическую проволоку.
Подробное рассмотрение областей применения
Ультразвуковые датчики — настоящие универсалы. Ультразвуковые датчики от SICK подтверждают свою надёжность и точность практически во всех областях применения: будь то определение положения, измерение расстояния или обнаружение твёрдых, порошкообразных и жидких сред. Неважно, в какой сфере, неважно, в каком случае применения.
Ультразвуковые датчики SICK демонстрируют свои преимущества при бесконтактном обнаружении объектов во всех возможных областях применения. Эти универсалы надёжно и точно выполняют все требования для автоматизации ваших процессов.
Индивидуально настраиваемый звуковой пучок — решение, оптимальное для вашего применения и уникальное для рынка
Регулируя чувствительность датчика, можно напрямую влиять на характеристику звукового пучка и, следовательно, на зону обнаружения датчика. Это позволяет — плавно — отображать или скрывать объекты в окружающем пространстве.
Независимо от того, длинный или короткий, узкий или широкий звуковой пучок, постепенно увеличивающаяся или максимально возможная зона обнаружения с начала измерения. Так, например, при измерении уровня заполнения можно скрыть стенки бака, при контроле пустой тары проверить ёмкости разного размера или реализовать контроль в ещё большем диапазоне с помощью всего лишь одного датчика.
Плавно и индивидуально настраиваемая зона обнаружения предлагает идеальное решение для вашего применения. При изменении условий окружающей среды датчик легко и быстро адаптируется к новым требованиям. Благодаря программному обеспечению Connect+ и SOPAS Engineering Tool от SICK возможности настройки практически не ограничены.
IO-Link
Как один из создателей формата IO-Link, компания SICK предлагает один из самых обширных портфелей устройств IO-Link на рынке. Интеллектуальные датчики Smart Sensors с IO-Link генерируют и принимают данные и информацию, которые выходят за рамки классических сигналов переключения или измеренных параметров процесса.
Краткий обзор ваших преимуществ
- Интеграция датчиков на уровне промышленной сети обеспечивает непрерывную коммуникацию для повышения производительности установки
- Простая замена устройств с автоматической настройкой параметров увеличивает эксплуатационную готовность оборудования
- Бесперебойная передача сигналов повышает надёжность установки
- Автоматическая настройка датчиков в зависимости от производственного процесса повышает гибкость в рамках того или иного применения
- Незначительные затраты на электромонтаж и использование неэкранированных кабелей позволяют снизить стоимость проекта
- Визуализация на ПК даёт чёткое представление о функциональных возможностях датчиков для оптимального решения поставленных задач
- Разнообразные варианты диагностики, например, уменьшение мощности сигнала, предотвращение простоев, позволяют осуществлять их планирование
- Автоматизированная спецификация электрооборудования по идентификаторам устройств упрощает документирование и снижает связанные с этим расходы
Обратитесь за консультацией в компанию SICK или нажмите здесь.
IO-Link решает проблему «последнего метра» за счёт непрерывной интеграции датчиков в сеть автоматизации. Это открывает новые подходы к повышению гибкости, надёжности и эффективности и позволяет снизить расходы на вашем предприятии.
SICK LifeTime Service
Услуги от SICK повышают производительность машин и оборудования, повышают общую безопасность людей, создают основу для непрерывной хозяйственной деятельности и обеспечивают защиту средств производства. В дополнение к непосредственным консультационным услугам SICK также поддержит вас во время проектирования концепции и ввода в эксплуатацию, а также во время работы прямо на месте.
Спектр услуг варьируется от технического обслуживания и осмотра, проверки рабочих характеристик до обновления и модернизации. Модульные или индивидуально разработанные договоры на сервисное обслуживание увеличивают срок службы и, следовательно, эксплуатационную готовность оборудования. Благодаря датчикам и системам неисправности или превышения предельных значений можно обнаружить в любое время.
Применение
Технические данные
Обзор технических данных
Обзор технических данных
Диапазон измерения Дистанция работы 30 mm .  .. 6.000 mm
.. 6.000 mmПредельная дальность сканирования 350 mm … 8.000 mm Разрешение ≥ 0,18 mm Точность воспроизведения ± 0,15 % Оценка 32 ms … 240 ms
32 ms … 240 ms 1)
Время вывода 8 ms … 60 ms Частота переключения 25 Hz
12 Hz
8 Hz
4 Hz
3 Hz
Аналоговый выход 4 mA … 20 mA, ≤ 500 Ω 2)
0 V … 10 V, ≥ 100.000 ΩЦифровой выход Вид PNP / NPN / Двухтактный режим: PNP/NPN IO-Link ✔ , IO-Link V1.1 Тип защиты IP65 / IP67 Выходной коннектор передатчика Прямой Диапазон рабочих температур –25 °C . 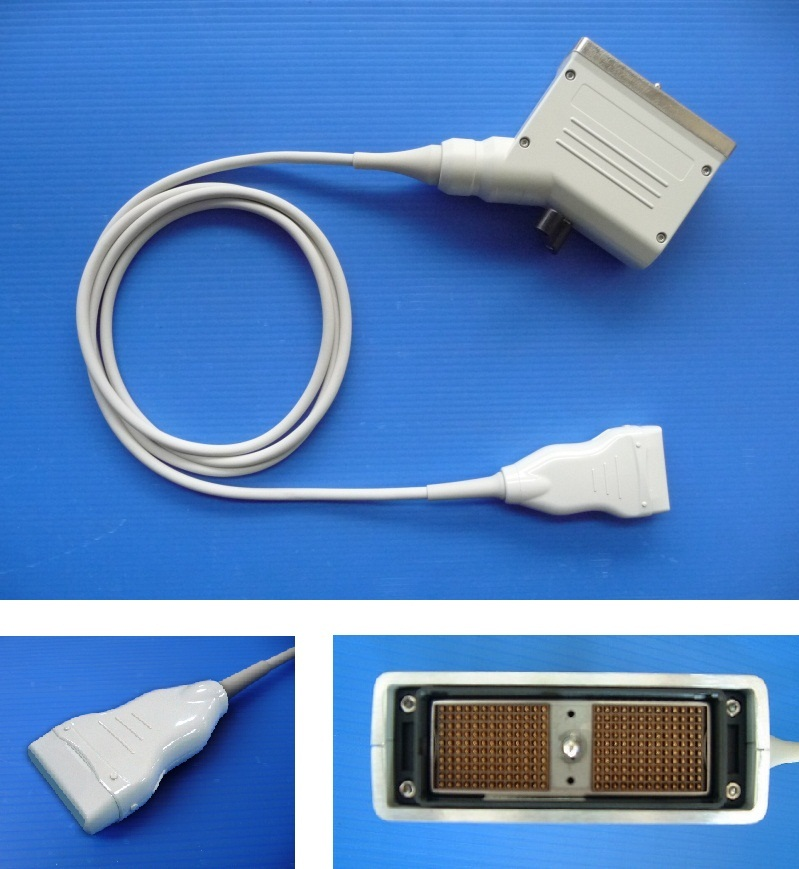 .. +70 °C
.. +70 °C- 1) Схема последующего сглаживания аналогового сигнала может в зависимости от ситуации увеличить время отклика до 200 %.
- 2) При 4 мА … 20 мА и UВ ≤ 20 В макс. нагрузка ≤ 100 Ω.
Подробные технические характеристики вы можете найти на странице соответствующего устройства
Загрузки
Пожалуйста, подождите…
Ваш запрос обрабатывается, это может занять несколько секунд.
Ультразвуковой датчик уровня | Сиб Контролс
Ультразвуковые датчики уровня
Что такое ультразвуковой датчик уровня?
Несколько методов, которые используются в ультразвуковых датчиках уровня:
Колебания кварца на частоте ультразвука имеют большую амплитуду в газе, чем в жидкости. Намокание чувствительного элемента вызывает уменьшение амплитуды выходного сигнала, обеспечивая тем самым обнаружение уровня жидкости.
Обнаружение уровня обеспечивается измерением времени между передачей и приемом сигнала ультразвука, произведенного керамическими кристаллами в основании резервуара. Обычно сенсоры включаются поочередно, передавая и получая импульс, который проходит столб жидкости и отражается от поверхности назад к основанию резервуара
Обычно сенсоры включаются поочередно, передавая и получая импульс, который проходит столб жидкости и отражается от поверхности назад к основанию резервуара
Обнаружение уровня выполнено двумя сенсорами, ориентируемыми друг к другу через внутреннюю часть резервуара. Один из кристаллов передает ультразвуковые сигналы, другой получает их. Коэффициент передачи сигнала увеличивается, когда жидкость смачивает кристаллы. Увеличение выходного сигнала указывает, что жидкость в резервуаре достигла определенного уровня.
Ультразвуковые датчики уровня.
С одним кристаллом в боковой части (a), основание (b), и двумя кристаллами в боковой части © резервуара;
L = уровень, 1 = резервуар, 2 = жидкость, 3 = пьезоэлектрический кристалл, 4 = генератор импульсов, 5 = приемник импульсов.
Что такое бесконтактный ультразвуковой уровнемер?
Данные уровнемеры построены на основе ультразвуковой технологии и предназначены для измерения уровня различных жидкостей.
Ультразвуковые импульсы излучаются уровнемером, распространяются по направлению к жидкости и отражаются от ее поверхности. Уровнемер улавливает отраженные эхо-сигналы и измеряет временной интервал между передачей излученного и приемом отраженного сигналов.
На основании этого временного интервала рассчитывается расстояние до поверхности жидкости.
Ультразвуковой уровнемер (открытый канал).
В данных приборах используется способ бесконтактного акустического измерения дистанции до измеряемой поверхности через газовую среду (воздух). Уровень рассчитывается, как разность расстояний: высоты базовой точки крепления уровнемера Hs и измеренного расстояния Lf, Hf = Hs — Lf, т. е. уровень рассчитывается «от крыши». Значение Hs является параметром резервуара и зависит от нескольких факторов, таких как температура стенок, уровень заполнения резервуара продуктом. Параметр Lf сильно зависит от скорости распространения звука в воздухе, т. е. от температуры, влажности, парциального давления паров нефтепродуктов, а также их размещения («слоистости») на пути акустического сигнала. Для уменьшения влияния (компенсации) указанных влияющих факторов датчики оснащают температурными датчиками и уголковыми отражателями, которые служат реперами при
Для уменьшения влияния (компенсации) указанных влияющих факторов датчики оснащают температурными датчиками и уголковыми отражателями, которые служат реперами при
измерениях.
В любом случае, разрешение и точность не могут быть лучше Ѕ длины акустической волны, которую использует данный датчик.
Ультразвуковой уровнемер (канал в жидкости).
Принцип действия аналогичен предыдущему, но акустическая волна распространяется внутри жидкой среды, датчик располагается на дне резервуара, т. е. измерения выполняются «от дна». Имеют более высокие частоты и как следствие лучшее разрешение. Как правило, показывают лучшую точность т. к. ряд факторов, воздействующих на точность, не влияют на жидкостную среду. Однако вследствие зоны нечувствительности на близком расстоянии для данных датчиков трудно добиться измерения ниже уровня 0.3…0.5 м.
Ультразвуковой уровнемер с волноводом.
Принцип действия датчика полностью совпадает с классической схемой открытого канала, но ультразвуковая волна распространяется внутри металлического волновода, внутри которого через известные фиксированные расстояния имеются отражатели (например, кольца или отверстия). Тем самым датчик дополнительно получает отраженные сигналы от реперов, обрабатывая которые можно повысить точность измерения расстояния. Однако проблемы измерения «от крыши» остаются. Кроме того, достаточно узкий волновод без отверстий (с малым их количеством) может сам служить источником погрешности, вследствие того, что в нем будут присутствовать застойные явления и уровень нефтепродукта внутри его будет устанавливаться с погрешностью, вызванной разным удельным весом жидкости внутри и вне волновода. Кроме того при работе на дизельном топливе или подготовленной нефти опарафинивание волновода может стать серьезной проблемой при эксплуатации («замыливание» реперных отверстий).
Тем самым датчик дополнительно получает отраженные сигналы от реперов, обрабатывая которые можно повысить точность измерения расстояния. Однако проблемы измерения «от крыши» остаются. Кроме того, достаточно узкий волновод без отверстий (с малым их количеством) может сам служить источником погрешности, вследствие того, что в нем будут присутствовать застойные явления и уровень нефтепродукта внутри его будет устанавливаться с погрешностью, вызванной разным удельным весом жидкости внутри и вне волновода. Кроме того при работе на дизельном топливе или подготовленной нефти опарафинивание волновода может стать серьезной проблемой при эксплуатации («замыливание» реперных отверстий).
Ультразвуковой сигнализатор уровня.
Ультразвуковая волна распространяясь внутри волновода и проходит вперед и назад в пределах зазора сенсора. Присутствие любого вещества кроме газа в пределах этого зазора изменяет частоту колебаний сенсора, таким образом сигнализируя, что уровень среды достиг места установки датчика. Отсутствие движущихся частей делает этот вид измерений весьма надежным, хотя этот метод не приемлем в средах с высоким уровнем загрязнений.
Отсутствие движущихся частей делает этот вид измерений весьма надежным, хотя этот метод не приемлем в средах с высоким уровнем загрязнений.
Понимание того, как работают ультразвуковые датчики
Чтение за 9 минут
Ультразвуковое зондирование — один из лучших способов определения близости и определения уровней с высокой надежностью.
Наша служба технической поддержки постоянно получает электронные письма о том, как работают наши датчики и в каких средах они работают (или не работают). ультразвуковые датчики работают в ваших приложениях.
На высшем уровне вам необходимо знать, что такое ультразвуковой датчик…
Что такое ультразвуковой датчик?
Ультразвуковой датчик — это прибор, измеряющий расстояние до объекта с помощью ультразвуковых волн.
Ультразвуковой датчик использует преобразователь для отправки и приема ультразвуковых импульсов, которые передают информацию о близости объекта.
Высокочастотные звуковые волны отражаются от границ, создавая отчетливые эхо-сигналы.
Как работают ультразвуковые датчики.
Ультразвуковые датчики работают, посылая звуковую волну на частоте выше диапазона человеческого слуха. Преобразователь датчика действует как микрофон для приема и отправки ультразвукового звука. Наши ультразвуковые датчики, как и многие другие, используют один преобразователь для отправки импульса и получения эха. Датчик определяет расстояние до цели, измеряя промежутки времени между отправкой и получением ультразвукового импульса.
Принцип работы этого модуля прост. Он посылает ультразвуковой импульс с частотой 40 кГц, который распространяется по воздуху и, если есть препятствие или объект, отражается обратно к датчику. Рассчитав время в пути и скорость звука, можно рассчитать расстояние.
Ультразвуковые датчики — отличное решение для обнаружения прозрачных объектов. Например, для измерения уровня жидкости в приложениях, использующих инфракрасные датчики, возникают проблемы с этим конкретным вариантом использования из-за прозрачности мишени.
Например, для измерения уровня жидкости в приложениях, использующих инфракрасные датчики, возникают проблемы с этим конкретным вариантом использования из-за прозрачности мишени.
Для обнаружения присутствия ультразвуковые датчики обнаруживают объекты независимо от цвета, поверхности или материала (если материал не очень мягкий, как шерсть, так как он может поглощать звук).
ультразвуковые датчики — надежный выбор.
Использование нескольких датчиков и избежание помех
При использовании нескольких датчиков в приложении важно подключить их таким образом, чтобы избежать таких проблем, как перекрестные помехи или любые другие помехи.
Чтобы предотвратить нарушение ультразвуковых сигналов, исходящих от вашего датчика, важно, чтобы передняя часть ультразвукового датчика не была заблокирована.
Общие препятствия включают:
- Грязь
- Снег
- Лед
- Другой конденсат
Для этого конкретного случая мы предлагаем наши датчики самоочистки.
Они предназначены специально для применений, требующих устойчивости к конденсации в средах с высокой влажностью. Наша функция самоочистки предназначена для непрерывной работы, чтобы функция самоочистки была активной.
Примечание. Функция самоочистки не предназначена для очистки поверхности датчика от грязи. Его цель состоит в том, чтобы очистить поверхность преобразователя от влаги для нормальной работы.
Как используются ультразвуковые датчики?
Наши ультразвуковые датчики расстояния, уровня и приближения обычно используются с платформами микроконтроллеров, такими как Raspberry Pi, ARM, PIC, Arduino, Beagle Board и другими.
Ультразвуковые датчики передают звуковые волны к цели и определяют расстояние до нее, измеряя время, за которое отраженные волны возвращаются к приемнику.
Этот датчик представляет собой электронное устройство, которое измеряет расстояние до цели путем передачи ультразвуковых звуковых волн, а затем преобразует отраженный звук в электрический сигнал.
Наши датчики часто используются в качестве датчиков приближения.
Ультразвуковые датчики также используются в системах предотвращения препятствий, а также в производстве.
Наши датчики ShortRange обеспечивают возможность обнаружения на более близком расстоянии, когда вам может понадобиться датчик, который измеряет объекты на расстоянии до 2 см. Они также созданы с учетом очень низких требований к энергопотреблению, а также для условий, в которых необходимо подавление шума.
Примечание. Мелкие зерна или частицы могут отклонять ультразвуковые импульсы от датчика из-за изменения поверхности или угла.
В этих условиях цель может поглощать звук или отклонять звуковую энергию от датчика из-за угла естественного откоса, изменения поверхности или того и другого.
Мы предлагаем рекомендации по задержке зерна здесь:
Когда не следует использовать ультразвуковой датчик
В некоторых случаях целевой объект настолько мал, что отраженного ультразвукового сигнала недостаточно для обнаружения, и расстояние не может быть правильно измерено.
Использование вашего ультразвукового датчика в вашем проекте
1. ПОДКЛЮЧЕНИЕ КОНТРОЛЛЕРА
В этом примере мы использовали Arduino, но вы можете использовать другой контроллер и программу по вашему выбору.
2. УСТАНОВИТЬ ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ
Установить Arduino Sketch на ваш ПК. Здесь вы вводите код, который хотите скомпилировать и отправить на плату Arduino.
3. НАСТРОЙТЕ СВОЙ ДАТЧИК С ARDUINO
Подключите Arduino к USB-кабелю и к компьютеру. Как только вы загрузите Arduino, вы сможете скомпилировать и активировать код.
4. СОСТАВЬТЕ И ВЫПОЛНИТЕ КОД
Приведенный ниже код позволит вам прочитать расстояние в сантиметрах. Скомпилируйте и запустите этот код, чтобы получить измерения расстояния до ближайшего объекта в реальном времени. (Обратите внимание: этот код предназначен не только для Arduino и будет работать на большинстве контроллеров)
Зачем использовать ультразвуковой датчик?
Ультразвук надежен при любом освещении и может использоваться внутри или снаружи. Ультразвуковые датчики могут справиться с предотвращением столкновений робота и частыми перемещениями, если они не слишком быстрые.
Ультразвуковые датчики могут справиться с предотвращением столкновений робота и частыми перемещениями, если они не слишком быстрые.
Ультразвук настолько широко используется, что его можно надежно внедрить в приложения для обнаружения зерновых бункеров, измерения уровня воды, дронов и автомобилей в вашем местном ресторане или банке.
Ультразвуковые дальномеры обычно используются в качестве устройств для обнаружения столкновений.
Ультразвуковые датчики лучше всего использовать для бесконтактного обнаружения:
- присутствия
- уровня
- положения
- расстояния
Ультразвук не зависит от:
- Света
- Дыма
- Пыли
- Цвета
- Материал (кроме мягких поверхностей, т.
Обнаружение на большом расстоянии целей с различными свойствами поверхности.
Ультразвуковые датчики превосходят инфракрасные датчики, поскольку на них не влияет дым или черные материалы, однако мягкие материалы, которые плохо отражают волны сонара (ультразвука), могут вызвать проблемы. Это не идеальная система, но она хороша и надежна.
Это не идеальная система, но она хороша и надежна.
Области применения, связанные с ультразвуковым обнаружением:
Ультразвуковое измерение расстояния
Измерение расстояния основано на измерении времени пролета. Время между отправкой и получением отраженного звукового сигнала рассчитывается датчиком. Ультразвуковые датчики расстояния , такие как MB7360 HRXL-MaxSonar-WR, используются в качестве мониторов высоты, для измерения уровня бункера и обнаружения зон близости.
-
-
- Пример. Измерение расстояния будет применяться в приложении для парковки в гараже, определяя, когда автомобиль полностью въезжает в гараж.
- MB7360 используется в качестве датчика уровня в бункере для определения наличия или отсутствия зерна и других материалов в бункерах.
-
Обнаружение людей с помощью ультразвуковых датчиков художественная инсталляция.
Одним из подробных вариантов использования является интерактивная художественная инсталляция, подробно описанная на Makezine. com.
com.
Мы написали статью, в которой рассматриваются ключевые вопросы и проблемы, связанные с использованием наших датчиков в решениях такого типа.
Прочтите нашу статью «Датчики киосков и обнаружение людей», чтобы узнать:
- Почему люди традиционно являются сложной целью для ультразвукового датчика
- Типы целей, которые являются идеальными
- Преимущества ультразвукового датчика приближения
Наши цель состоит в том, чтобы помочь вам найти датчик, который достаточно чувствителен для вашего проекта, но позволяет избежать потенциальных проблем, таких как улавливание помех от внешнего источника шума.
Посмотрите следующее видео. Компания nuMedia Innovations разработала для магазина Microsoft Store в Сиэтле, штат Вашингтон, решение для обнаружения присутствия человека на витрине магазина.
Популярные датчики для измерения расстояния
Ультразвуковые датчики уровня
-
-
- РАЗРЕШЕНИЯ ЗАКРЫТИЯ.

- В этом проекте маломощного датчика уровня воды от Amedee, разработчика Hackster.io, используется атмосферостойкий датчик из нашей линейки WR. В сочетании с узлом LoraWan и сетью с открытым исходным кодом The Things IoT этот проект был разработан для измерения уровня воды в резервуаре для дождевой воды. Хотя его можно использовать во многих приложениях.
- РАЗРЕШЕНИЯ ЗАКРЫТИЯ.
-
Выбор датчика уровня
Вы можете прочитать эту статью .
Мы покрываем:
- Важные факторы, которые необходимо учитывать при монтаже датчика
- Как обращаться с датчиком в среде с агрессивными химическими веществами
- Какие линии датчиков лучше всего подходят для условий, в которых может возникнуть проблема изморози на датчике
Использование датчика в суровых условиях
Если вы используете датчик в суровых условиях, мы предлагаем добавить защиты, чтобы вы могли успешно использовать датчик в своем проекте.
В качестве краткого руководства, чтобы проинформировать вас о совместимости наших датчиков в некоторых средах, мы создали Таблицу химической совместимости.
Здесь представлены некоторые из наиболее популярных запросов, связанных с химическими веществами и окружающей средой.
Заказ полностью герметичного датчика
При использовании датчика из нашей линейки WR вывод датчика остается открытым, что позволяет подключать к датчику провода и оборудование.
Причина, по которой мы оставляем его открытым, заключается в том, что он обеспечивает большую гибкость при выборе способа подключения к датчикам.
В некоторых приложениях датчик может подвергаться воздействию погодных условий.
Если при монтаже требуется защитить заднюю часть датчика от повреждений, необходимо загерметизировать контакты датчика.
Для этого мы предлагаем наш вариант крепления проводом в качестве решения…
Вариант крепления провода полностью закрывает распиновку датчика, добавляя небольшой колпачок, заполненный эпоксидной смесью, и прикрепленный кабель.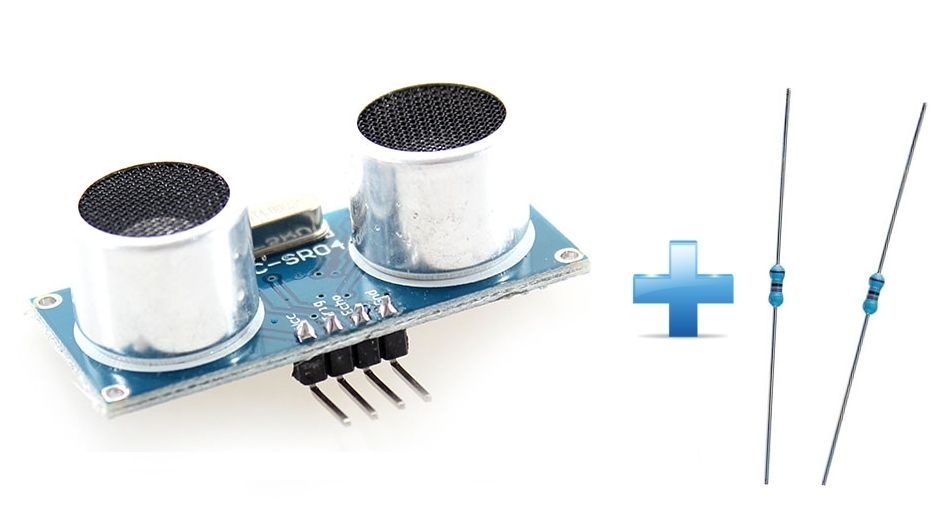
Добавление дополнительного герметика на заднюю часть датчика защищает его от воздействия погоды, пыли и воды…
Это предназначено не только для людей, которые хотят защитить свой датчик, но и для людей с ограниченный опыт пайки.
Если вы не хотите рисковать своим новым датчиком при первой попытке его пайки, мы настоятельно рекомендуем работать с нашими профессиональными датчиками, припаянными на месте, с проволочными креплениями.
Популярные датчики для чувствительности уровня жидкости
Ультразвуковое обнаружение препятствий
-
-
- Наши сенсаторы для бессмысленности , а также для нашего использования для роботов.
- Ультразвуковые датчики подходят для обнаружения на близком расстоянии до десяти метров и обеспечивают несколько измерений диапазона в секунду.
- Основные преимущества:
- Низкое энергопотребление – может питаться от аккумулятора, недорого.

- Он может работать в различных условиях окружающей среды — ультразвуковые датчики работают в задымленных помещениях, где другие датчики не работают.
- Низкое энергопотребление – может питаться от аккумулятора, недорого.
-
Автономная навигация и обход препятствий с помощью ультразвуковых датчиков
Мы добились большого успеха, работая с компаниями, производителями и разработчиками продуктов в проектах автономной навигации.
Ультразвуковые датчики в работе БПЛА
Вы можете прочитать эту статью Работа ультразвукового датчика на БПЛА , , в которой рассматриваются проблемы, с которыми вы можете столкнуться при работе с БПЛА, и способы их устранения.
Примечания по устранению неполадок:
- Действия при турбулентности воздуха
- Акустический шум пропеллера
- Заземление и питание
- Кондуктивный электрический шум
- Излучаемый электрический шум
- Вибрация рамы
через вопрос лучшее, что мы можем.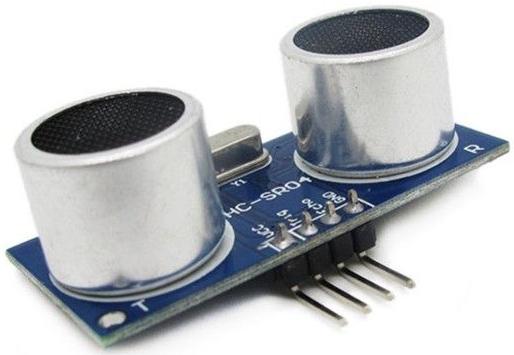
Сравнение трех лучших датчиков для мобильных робототехники в помещении
Если вы разрабатываете автономного навигационного робота, прочтите нашу статью о Лучший ультразвуковой датчик для мобильной робототехники .
В этом ресурсе мы сравниваем наши MB1033, MB1030 и MB1240.
Мы проведем вас через следующее:
- Обнаружение людей и отклонение боковых объектов
- Рекомендуемые диаграммы направленности и рекомендации по мощности
- Работа датчика при превышении температуры
- Работа с напряжением питания
- Работа с подавление источников шума
- Работа с датчиками перекрестных помех (Какой датчик лучше, когда перекрестные помехи могут быть проблемой)
Прочтите обзор этих датчиков в этом приложении здесь.
Использование датчика с широким лучом для обнаружения препятствий
Мы разработали варианты широкого луча нашей широко используемой линейки датчиков HRXL-MaxSonar-WR.
Эти датчики включают –
MB7375 , который считывает RS232, и MB7395 , что означает TTL.
Этот датчик был разработан таким образом, чтобы у вас был датчик с широким лучом для приложений, в которых он необходим.
Вы можете просмотреть изображение ниже, чтобы увидеть, насколько широка диаграмма направленности:
Эти датчики легко настроить. Никаких специальных настроек не требуется, и он предлагает угол луча более 90 градусов для многих целей.
Популярные датчики для БПЛА
Вы ознакомились с этими примерами из практики наших сотрудников?
В настоящее время у нас есть программа Collaborator, которая освещает варианты использования наших датчиков в различных приложениях. Вы можете просмотреть некоторые из них ниже.
Хотите присоединиться к программе Collaborator? Свяжитесь с нами здесь.
Radio Bridge разработала беспроводной ультразвуковой датчик уровня с LoRaWAN
LX Group разработала ультразвуковой датчик расстояния для измерения уровня в резервуарах
Компания из Швеции Elsys использует датчик из нашей линии WR в их датчике расстояния IOT
Teclab и Fast обеспечивает датчик уровня IoT по имени Level-x
В заключение…
2
В заключение…
2
В заключение .
 .. 2
.. 2
В заключение. Датчики — это надежное и экономичное решение для определения расстояния, уровня и обнаружения препятствий.
Как только вы поймете, как работают ультразвуковые датчики и для чего ультразвуковая технология идеальна, а для чего нет, вы сможете принять более взвешенное решение о правильной сенсорной системе для вашего приложения.
Взгляните на наше запатентованное решение для обнаружения груза в 53-футовых прицепах для определения его заполнения или отсутствия. Прочтите о датчике груза прицепа.
Просмотрите наш каталог продукции и свяжитесь с нашей службой технической поддержки, нажав кнопку ниже , чтобы получить помощь в выборе датчика.
Резюме
Основы ультразвуковых датчиков
Ультразвуковые датчики доступны уже несколько десятилетий, и тем не менее они продолжают занимать значительную часть рынка датчиков благодаря своим возможностям, гибкости и низкой стоимости. По мере того, как все больше продуктов становятся автономными, спрос на них еще больше возрастает с их включением в роботов, автономные транспортные средства и дроны. Понимание того, как работает ультразвуковой датчик, как его можно использовать, плюсы и минусы его использования, а также их общие области применения, покажет, насколько они актуальны сейчас, как и тогда, когда они были впервые представлены.
По мере того, как все больше продуктов становятся автономными, спрос на них еще больше возрастает с их включением в роботов, автономные транспортные средства и дроны. Понимание того, как работает ультразвуковой датчик, как его можно использовать, плюсы и минусы его использования, а также их общие области применения, покажет, насколько они актуальны сейчас, как и тогда, когда они были впервые представлены.
Что такое ультразвуковой датчик?
Ультразвуковые датчики обычно издают чириканье в диапазоне от 23 кГц до 40 кГц, что намного выше типичного диапазона слышимости человеческого слуха на частоте 20 кГц, отсюда и термин «ультразвуковой». Используя этот щебет, они измеряют время, необходимое звуку, чтобы отразиться от объекта. Это основано на тех же основных принципах эхолокации, которые летучие мыши используют для поиска добычи. Поскольку скорость звука в воздухе при комнатной температуре составляет 343 метра в секунду, это время можно легко преобразовать в расстояние, помня, что ультразвуковой сигнал распространяется как к воспринимаемому объекту, так и от него.
Расстояние (метры) = (прошедшее время [секунды] * 343 [метры/секунды]) / 2
Единицы измерения в этом уравнении можно изменить в соответствии с потребностями конкретного приложения, но простота уравнения показывает относительно простая работа ультразвукового датчика.
Как работает ультразвуковой датчик?
Переходя от теории к реальности, ультразвуковой датчик состоит из двух частей: передатчика и приемника. В наиболее стандартной конфигурации они располагаются бок о бок как можно ближе друг к другу. Когда приемник находится близко к передатчику, звук распространяется по более прямой линии от передатчика к обнаруженному объекту и обратно к приемнику, что дает меньшие ошибки в измерениях. Существуют также ультразвуковые приемопередатчики, в которых функции передатчика и приемника объединены в одном блоке, что минимизирует ошибку настолько, насколько это физически возможно, а также значительно уменьшает площадь, занимаемую печатной платой.
Базовая работа пары ультразвуковых передатчика и приемника Акустические волны, выходящие из передатчика, больше похожи по форме на свет, выходящий из фонарика, чем на лазер, поэтому необходимо учитывать распространение и угол луча. По мере того, как звуковые волны распространяются дальше от передатчика, область обнаружения увеличивается в поперечном и вертикальном направлениях. Эта изменяющаяся область является причиной того, что ультразвуковые датчики указывают свои характеристики покрытия либо по ширине луча, либо по углу луча вместо стандартной области обнаружения. При сравнении этого угла луча между производителями рекомендуется убедиться, что угол луча представляет собой либо полный угол луча, либо угол отклонения от прямой линии от преобразователя.
По мере того, как звуковые волны распространяются дальше от передатчика, область обнаружения увеличивается в поперечном и вертикальном направлениях. Эта изменяющаяся область является причиной того, что ультразвуковые датчики указывают свои характеристики покрытия либо по ширине луча, либо по углу луча вместо стандартной области обнаружения. При сравнении этого угла луча между производителями рекомендуется убедиться, что угол луча представляет собой либо полный угол луча, либо угол отклонения от прямой линии от преобразователя.
Вторичным эффектом угла луча является дальность действия устройства. Как правило, узкий луч обеспечивает большую дальность обнаружения, поскольку энергия ультразвукового импульса более сфокусирована и может пройти дальше, прежде чем рассеется до непригодных для использования уровней. И наоборот, более широкий луч распределяет эту энергию по более широкой дуге, уменьшая ожидаемую дальность обнаружения. Выбор идеальной ширины луча сильно зависит от области применения: широкие лучи лучше охватывают большие площади и обеспечивают общее обнаружение, а более узкие лучи позволяют избежать ложных срабатываний за счет ограничения области обнаружения.
Выбор идеальной ширины луча сильно зависит от области применения: широкие лучи лучше охватывают большие площади и обеспечивают общее обнаружение, а более узкие лучи позволяют избежать ложных срабатываний за счет ограничения области обнаружения.
При поиске отдельных компонентов ультразвуковые датчики могут быть приобретены как независимые передатчики и приемники или как их комбинация в одном устройстве, известном как ультразвуковой приемопередатчик. Большинство опций аналоговых ультразвуковых датчиков активируются путем отправки триггерного сигнала на передатчик, а приемник отправляет сигнал обратно при обнаружении эха. Длина импульса и любая кодировка могут быть настроены разработчиком по мере необходимости. Этот процесс в конечном итоге оставляет вычисление времени между триггером и эхом, а также декодирование хост-контроллеру. Существуют цифровые модули ультразвуковых датчиков, которые рассчитывают расстояние на борту, а затем передают расстояние на хост через коммуникационную шину. Хотя ультразвуковые передатчики, приемники или приемопередатчики часто приобретаются отдельно и собираются с пользовательскими схемами и прошивкой, они также иногда доступны в виде единого блока, предварительно смонтированного на печатной плате в стандартной конфигурации дальномера и простой логической платы. Несмотря на простоту использования, дизайнеры отказываются от значительной гибкости и настройки, используя эти модули.
Хотя ультразвуковые передатчики, приемники или приемопередатчики часто приобретаются отдельно и собираются с пользовательскими схемами и прошивкой, они также иногда доступны в виде единого блока, предварительно смонтированного на печатной плате в стандартной конфигурации дальномера и простой логической платы. Несмотря на простоту использования, дизайнеры отказываются от значительной гибкости и настройки, используя эти модули.
Сильные и слабые стороны ультразвуковых датчиков
Как и любая технология, ультразвуковые датчики лучше всего используются в определенных ситуациях или приложениях по сравнению с другими. Вот некоторые из их сильных сторон:
- На ультразвуковые датчики не влияет цвет обнаруживаемых объектов, включая полупрозрачные или прозрачные объекты, такие как вода или стекло.
- Их минимальная и максимальная дальности довольно гибкие, при этом большинство ультразвуковых датчиков способны обнаруживать от нескольких сантиметров до примерно пяти метров.
 Специально сконфигурированные модули могут измерять даже до почти 20 метров.
Специально сконфигурированные модули могут измерять даже до почти 20 метров. - Благодаря десятилетиям использования эта зрелая технология очень надежна и хорошо изучена, что дает стабильные результаты. Ультразвуковые датчики
- обеспечивают относительно точные измерения, как правило, в пределах 1% и даже более высокую точность при желании.
- Они могут производить много измерений в секунду, обеспечивая высокую частоту обновления.
- Поскольку редкие материалы не требуются, они обычно довольно недорогие.
- Ультразвуковые датчики устойчивы к средам с электрическими шумами, а также к большинству акустических шумов, особенно при использовании модулей, оснащенных закодированными сигналами.
Несмотря на универсальность технологии, ультразвуковые датчики должны учитывать несколько ограничений, прежде чем сделать окончательный выбор датчика:
- Поскольку скорость звука зависит от температуры и влажности, условия окружающей среды могут изменить точность измерений.

- Несмотря на то, что зона обнаружения является трехмерной, ультразвуковой датчик обнаруживает только наличие чего-либо на определенном расстоянии от датчика и не может обеспечить обратную связь о том, где находится объект в области обнаружения, а также какие-либо особенности, такие как форма или цвет.
- Несмотря на то, что их форм-фактор относительно невелик и их можно без проблем интегрировать в автомобили или промышленное оборудование, ультразвуковые датчики могут быть слишком большими для очень небольших встроенных проектов.
- Как и любой датчик, они могут испачкаться, намокнуть или замерзнуть, что приведет к нестабильности или неработоспособности.
- Из-за своей зависимости от звука, который, в свою очередь, зависит от какой-то среды, ультразвуковые датчики не работают в вакууме.
Где обычно используются ультразвуковые датчики?
Первым из двух наиболее распространенных применений ультразвуковых датчиков является определение уровня жидкости, так как они могут обнаруживать жидкости любого цвета или прозрачности, но при этом являются бесконтактными.![]() Второй – это обнаружение объектов общего назначения из-за их дешевизны и простоты. Конкретные приложения для обнаружения объектов включают в себя обнаружение предотвращения столкновений для транспортных средств, обнаружение людей, обнаружение присутствия, сортировку коробок, обнаружение поддонов с помощью вилочных погрузчиков, подсчет бутылок на машинах для розлива напитков и многое другое.
Второй – это обнаружение объектов общего назначения из-за их дешевизны и простоты. Конкретные приложения для обнаружения объектов включают в себя обнаружение предотвращения столкновений для транспортных средств, обнаружение людей, обнаружение присутствия, сортировку коробок, обнаружение поддонов с помощью вилочных погрузчиков, подсчет бутылок на машинах для розлива напитков и многое другое.
Примером более творческого использования ультразвуковых датчиков может быть использование односторонней функции ультразвуковых передатчиков и приемников по отдельности. Хотя ультразвуковые импульсы находятся за пределами слышимости человека, они находятся в пределах слышимости различных животных. Ультразвуковой передатчик предположительно может использовать свои излучатели для отпугивания животных, например птиц, а ультразвуковой приемник можно использовать для обнаружения шума.
Резюме
Ультразвуковые датчики — это хорошо известная технология, которая по-прежнему чрезвычайно актуальна во многих промышленных и бытовых приложениях. Их простота, низкая стоимость и прочная конструкция делают их отличным выбором для многих новых продуктов, требующих обнаружения присутствия или измерения расстояния. Тем не менее, возможность изменять как аппаратную, так и программную конфигурацию делает их чрезвычайно универсальными для еще более сложных ситуаций.
Их простота, низкая стоимость и прочная конструкция делают их отличным выбором для многих новых продуктов, требующих обнаружения присутствия или измерения расстояния. Тем не менее, возможность изменять как аппаратную, так и программную конфигурацию делает их чрезвычайно универсальными для еще более сложных ситуаций.
Ультразвуковые датчики
Ультразвуковые датчикиПодготовить предложение
Чтобы получить доступ, войдите или Создать учетную запись
{{эта.модель}} {{ this.series_title }}
{{это.количество}} Икс
$ {{#strip_cents this.list_price}}{{this.list_price}}{{/strip_cents}}
- Товары
- Датчики
- Ультразвуковые датчики
Узкие результаты
Очистить все фильтрыВыход
- (5) Аналоговый
- (7) Дискретный
- (1) Дискретный и аналоговый
- (1) Э/М реле
- (1) Серийный
Диапазон
- (4) >100мм — <=500мм
- (4) >500мм — <=1000мм
- (4) >1м — <=5м
- (1) >5м — <=10м
Сила
- (1) Универсальный переменный/постоянный ток
- (10) Только постоянный ток
Химическая стойкость
- (4) Да
Всасывающий/выкачивающий насос
- (3) Да
Беспроводная связь
- (1) Да
Узкие результаты
выбранные фильтры
-
Ультразвуковой датчик с температурной компенсацией серии T30UX
Ультразвуковой датчик с температурной компенсацией серии T30UX
Компактные, угловые ультразвуковые датчики со встроенной температурной компенсацией.
 Доступны аналоговые или настраиваемые дискретные модели. Дальность действия 3 м.
Доступны аналоговые или настраиваемые дискретные модели. Дальность действия 3 м. Информация о продукте
-
Барабанный ультразвуковой датчик серии S18U
Ультразвуковой датчик для бочек серии S18U
Ультразвуковой датчик для бочек идеально подходит для погрузочно-разгрузочных работ и фасованных товаров: розлив или определение уровня жидкости. Диапазон чувствительности < 300 мм.
Информация о продукте
-
QT50U Химически стойкий ультразвуковой датчик, диапазон 8 м
QT50U Химически стойкий ультразвуковой датчик с диапазоном действия 8 м
Имеет полностью герметичный ударопрочный корпус, который идеально подходит для контроля уровня жидкостей и твердых веществ в резервуарах.

Информация о продукте
-
Ультразвуковой датчик IP69K из нержавеющей стали серии M25U
Ультразвуковой датчик IP69K из нержавеющей стали серии M25U
Водонепроницаемые ультразвуковые датчики из нержавеющей стали были специально созданы для обеспечения безупречной работы в пищевой промышленности и других санитарных отраслях.
Информация о продукте
-
Компактный высокоскоростной ультразвуковой датчик серии QS18U
Компактный высокоскоростной ультразвуковой датчик серии QS18U
Ультразвуковой датчик обнаруживает предметы независимо от цвета, материала или прозрачности.
 Чувствительность в пределах окна от 50 до 500 мм с временем отклика 15 миллисекунд.
Чувствительность в пределах окна от 50 до 500 мм с временем отклика 15 миллисекунд. Информация о продукте
-
Ультразвуковой датчик серии T30U, 2-метровый диапазон
Ультразвуковой датчик серии T30U, 2-метровый диапазон
Прямоугольный датчик с резьбой 30 мм и диапазоном чувствительности до 2 м. Доступен с двойной дискретной, аналоговой и логикой переключения управления насосом для контроля уровня в баке.
Информация о продукте
-
Универсальный ультразвуковой датчик серии Q45U
Универсальный ультразвуковой датчик серии Q45U
Универсальный датчик поддерживает карты памяти для программирования для быстрого и простого изменения параметров измерения с диапазоном до 3 м.

Информация о продукте
-
Ультразвуковой датчик удаленного преобразователя серии Q45UR
Ультразвуковой датчик удаленного преобразователя серии Q45UR
Прецизионная программируемость для определения присутствия объекта с точностью до 0,6 мм. Корпус из пластика или нержавеющей стали с резьбовым цилиндром или сенсорной головкой Flat-Pak.
Информация о продукте
-
Ультразвуковой датчик противоположного режима серии T18U
Ультразвуковой датчик встречной волны серии T18U
Высокочастотный ультразвуковой излучатель и настроенный приемник для точного обнаружения встречной волны.
 Т-образный прямоугольный корпус с резьбой на носу 18 мм.
Т-образный прямоугольный корпус с резьбой на носу 18 мм. Информация о продукте
-
Беспроводной ультразвуковой датчик серии K50U
Беспроводной ультразвуковой датчик серии K50U
Беспроводной ультразвуковой датчик K50U упрощает мониторинг мобильных и удаленно расположенных резервуаров и контейнеров.
Информация о продукте
Ультразвуковой датчик
По технологии
Дискретные и силовые модули МОП-транзисторы Силовые модули Карбид кремния (SiC) Все остальные
Управление энергопотреблением Устройства с питанием от PoE Драйверы ворот Преобразование переменного тока в постоянный Все остальные
Формирование сигнала и управление
Датчики
Блок управления двигателем
Пользовательские и ASSP
Интерфейсы
Беспроводное подключение
Синхронизация, логика и память
Решением
Автомобильный
промышленный
Облако
5G и предприятия
Интернет вещей (IoT)
Мобильный
Узнайте больше о карбиде кремния
(SiC)
Полная экосистема деталей для поддержки широкой запрещенной зоны
схемы питания, включая SiC-диоды, SiC-MOSFET и SiC-модули.
Просмотр продукта
Быстрые ссылки:
Новые продуктыПродукт Услуги
Автомобильный ADASPowertrain, Safety and SecurityBody Electronics and LED LightingTechnologyЭлектрификация транспортных средств
промышленный Энергетическая инфраструктураТехнологииПромышленная автоматизацияУмные здания
5G и облачная мощь Телекоммуникационная инфраструктураМощность сервера
Интернет вещей (IoT) Возможности подключенияIoT Управление питаниемIoT Платформы прототипированияSensingTechnology
Медицинский Аудиология FocusClinical Point-of-CareПортативные медицинские устройстваМедицинские устройства визуализации
Аэрокосмическая промышленность и оборона Защита от несанкционированного доступа Active ShieldRad Hard Space & Hi-Rel ASICsRad Hard Aerospace ASIC
Товарищества
Партнерство Субару Экосистема Партнеры
Знакомство с датчиком дождя и освещенности решение!
Датчики дождя и света маленькие
оптоэлектронные модули, обычно расположенные в задней части автомобиля
зеркало.
Просмотр решения
Инструменты и программное обеспечение Инструмент рекомендации продукта+Интерактивные блок-схемыИнструменты оценки/разработкиВеб-дизайнер+Инструменты дизайнаStrata Developer StudioSimulation/SPICE Models
Ресурсы Библиотека видеоТехническая документацияБиблиотека ПОPower Webinars
Техническая поддержкаПоддержка продаж и распространенияЧасто задаваемые вопросы
Свяжитесь с нами Услуги поставщика
Форумы сообщества Bluetooth с низким энергопотреблением
Вам нужна техническая поддержка?
Отправить Проездной билетВы предпочитаете человека? Позвоните нам!
Америка: 011 421 33 790-2910
EMEA: 00421 33 790-2910
О онсеми Экосистемные партнерыКорпоративный информационный бюллетеньКачество и надежностьЛидерствоИнтеллектуальная собственностьМестоположения
Экологические, социальные и Управление Годовой отчет об устойчивом развитииРазнообразие, равенство и инклюзивность Программа Giving NowЭтика и соблюдение нормативных требованийСоциальная ответственность
Свяжитесь с нами
События ВыставкиВебинары
Новости и СМИ Объявления для прессыВ новостяхБлогБиблиотека изображенийСМИ Контакты
Отношения с инвесторами СобытияУправлениеФинансыИнформация об акцияхНовостиРесурсы
Вы ищете, чем заняться? Присоединяйтесь к нам на выставке VISION!
4-6 октября 2022 г.
onsemi продемонстрирует свои интеллектуальные сенсорные решения для промышленных рынки. Наши специалисты будут доступны на стенде, чтобы обсудить и помочь вам поддержите ваше приложение и вызовы дизайна.
Считайте меня!
Поиск & Подать заявкуНачало карьерыОпыт карьерыКто мы
Стажировки Подать заявку на стажировкуЧасто задаваемые вопросыОтношения с университетами
Преимущества карьеры
Где мы
Главная > Продукты > Датчики > Ультразвуковой датчик
Продукция
Техническая документация
Загрузка. ..
..
Функциональность и технология ультразвуковых датчиков
- Служба поддержки
- Принцип работы
- Функциональность и технология ультразвуковых датчиков
Ультразвуковые датчики являются универсальными в мире датчиков и подходят практически для любых задач обнаружения в промышленных приложениях. Обнаруживаемые объекты могут быть твердыми, жидкими, гранулированными или порошкообразными. Они надежно обнаруживают прозрачные или глянцевые объекты, а также объекты с изменяющимся цветом. Будучи чрезвычайно устойчивыми к загрязнениям, ультразвуковые датчики проявляют свою эффективность, особенно в суровых рабочих условиях, поскольку на надежность процесса не влияют пыль, дым, туман и т.п.
Принцип действия датчиков
Большинство ультразвуковых датчиков основаны на принципе измерения времени распространения звука между отправкой и приемом (бесконтактный переключатель).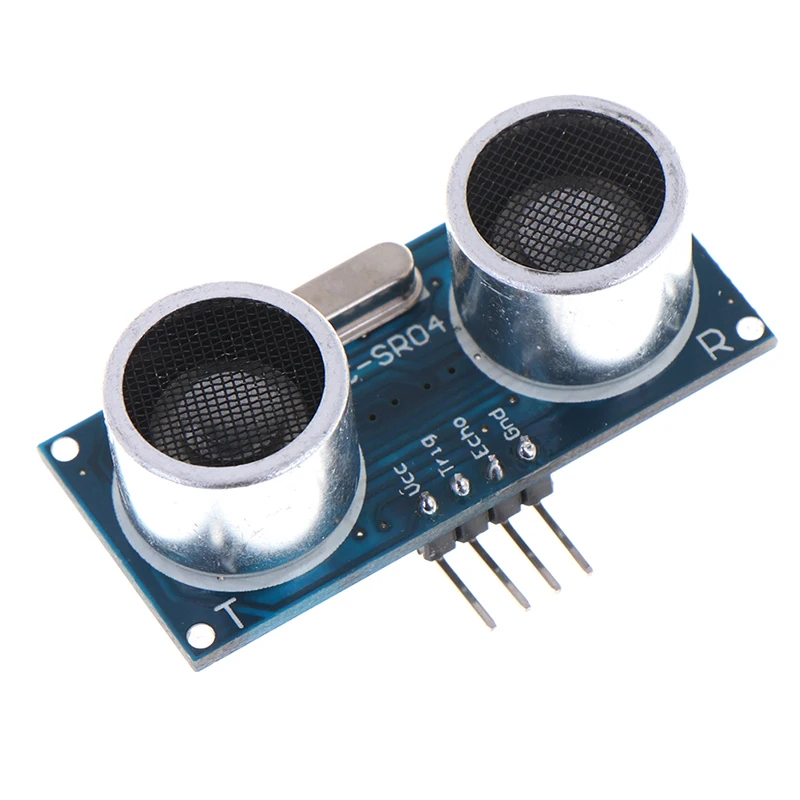 Барьерный принцип определяет расстояние от датчика до отражателя (рефлекторный датчик) или до объекта (датчик на пересечение луча) в диапазоне измерения.
Барьерный принцип определяет расстояние от датчика до отражателя (рефлекторный датчик) или до объекта (датчик на пересечение луча) в диапазоне измерения.
Бесконтактные переключатели
Ультразвуковые датчики приближения представляют собой простейшую форму ультразвукового обнаружения объектов. Передатчик и приемник объединены в одном корпусе. Ультразвук отражается непосредственно от измеряемого объекта к приемнику. Ультразвуковые датчики с функцией обучения отличаются от обычных типов тем, что они обеспечивают более простое и разнообразное управление простым нажатием кнопки.
Типичные области применения:
- Измерение расстояний
- Измерение высоты штабеля
Световозвращающие датчики
Световозвращающий датчик работает по тому же принципу, что и ультразвуковой бесконтактный датчик. Измерение распространения звука определяет расстояние от датчика до отражателя или до объекта в диапазоне измерения. В качестве рефлектора можно использовать любой отражающий звук неподвижный объект.
Типичные области применения:
- Предметы неправильной формы и наклонные предметы
- Звукоотражающие мишени
- Звукопоглощающие материалы, такие как хлопок и поролон
Датчики сквозного луча
Ультразвуковые датчики на пересечение луча имеют короткое время отклика и большой диапазон. Передатчик и приемник размещены в двух отдельных корпусах. Передатчик постоянно излучает звуковые волны через воздух к приемнику. Приемник переключается через выходной каскад, когда объект прерывает звуковые волны.
Типичные области применения:
- Обнаружение объектов в быстрой последовательности
- Подсчет объектов из материалов, которые трудно обнаружить (стеклянные контейнеры, ПЭТ-бутылки)
- Мониторинг прозрачных материалов
- Мониторинг разрыва пленки
- Мониторинг уровня в резервуарах бункеры
Ультразвуковые датчики приближения
Устройство и работа
В ультразвуковых датчиках приближения используется специальный звуковой преобразователь, который позволяет попеременно передавать и принимать звуковые волны. Звуковые волны, излучаемые преобразователем, отражаются от объекта и возвращаются в преобразователь. После излучения звуковых волн ультразвуковой датчик переключится в режим приема. Время, прошедшее между излучением и получением, пропорционально расстоянию объекта от датчика.
Звуковые волны, излучаемые преобразователем, отражаются от объекта и возвращаются в преобразователь. После излучения звуковых волн ультразвуковой датчик переключится в режим приема. Время, прошедшее между излучением и получением, пропорционально расстоянию объекта от датчика.
Цифровой выход
Обнаружение возможно только в пределах зоны обнаружения. Требуемый диапазон чувствительности можно отрегулировать с помощью потенциометра датчика или электронного обучения (кнопка обучения или дистанционное обучение). Если объект обнаружен в пределах заданной области, выход изменит состояние, которое визуализируется встроенным светодиодом.
Обнаружение целей
Звуковые волны лучше всего отражаются от твердых поверхностей. Мишенями могут быть твердые вещества, жидкости, гранулы или порошки. Как правило, ультразвуковые датчики используются для обнаружения объектов там, где оптическим принципам не хватает надежности.
Стандартная мишень
Стандартная мишень представляет собой квадратный плоский объект следующих размеров:
- 15 x 15 мм для Sde до 250 мм
- 30 x 30 мм для Sde до 1000 мм
- 100 x 100 мм для Sde > 1000 мм
Мишень должна быть установлена перпендикулярно оси датчика.
Размер
Для надежного обнаружения объекта отраженный сигнал должен быть достаточно сильным. Интенсивность сигнала зависит от размера объекта. При использовании стандартного объекта доступно полное расстояние сканирования Sd.
Поверхность
Обнаружение звукопоглощающих материалов приведет к уменьшению максимального расстояния обнаружения. Максимальное расстояние обнаружения может быть достигнуто, если максимальная шероховатость объекта не превышает 0,2 мм.
Типичные звукопоглощающие материалы:
- поролон
- хлопок / шерсть / ткань / войлок
- очень пористые материалы
Профили звукового конуса
представляют собой активные чувствительные области для ультразвуковых датчиков. Графики демонстрируют боковые звуковые лепестки ближнего действия, которые расширяют угол апертуры датчика ближнего действия. За счет звукопоглощения и диффузии воздуха лепестки уменьшаются на больших дальностях. Размер, форма, свойства поверхности и направление обнаружения цели очень сильно влияют на боковую область обнаружения ультразвукового датчика. Профили звукового конуса применимы ко всему семейству продуктов, например. профиль 100–1000 мм является репрезентативным для всех связанных датчиков с одинаковым диапазоном чувствительности — с цифровыми или аналоговыми выходами и т. д.
Профили звукового конуса применимы ко всему семейству продуктов, например. профиль 100–1000 мм является репрезентативным для всех связанных датчиков с одинаковым диапазоном чувствительности — с цифровыми или аналоговыми выходами и т. д.
Метод измерения
Стандартные квадратные мишени из стали используются для определения формы типичных профилей звукового конуса.
- 15 x 15 мм для Sde до 250 мм
- 30 x 30 мм для Sde до 1000 мм
- 100 x 100 мм для Sde > 1000 мм
Мишени расположены перпендикулярно оси датчика, подошли боком на разное расстояние. Затем строится профиль звукового конуса путем соединения измеренных точек линией. Форма конуса может меняться, если обнаруживаются круглые объекты или объекты другой формы.
Ультразвуковые датчики обратного отражения
Устройство и принцип действия
Ультразвуковой датчик отражения аналогичен по принципу действия ультразвуковому датчику приближения. Расстояние от датчика до отражателя или до объекта в пределах расстояния обнаружения определяется путем измерения времени распространения. В качестве рефлектора можно использовать любой отражающий звук неподвижный объект. Расстояние срабатывания Sd (расстояние между датчиком и отражателем) можно отрегулировать в соответствии с заданными условиями с помощью потенциометра датчика. Пока измеренное время распространения ультразвукового сигнала соответствует расстоянию от датчика до отражателя, устройство находится в неактивном состоянии. Когда объект попадает на расстояние обнаружения, время распространения изменяется, и датчик переходит в активное состояние. Это также позволяет обнаруживать звукопоглощающие и звукоотражающие объекты.
Расстояние от датчика до отражателя или до объекта в пределах расстояния обнаружения определяется путем измерения времени распространения. В качестве рефлектора можно использовать любой отражающий звук неподвижный объект. Расстояние срабатывания Sd (расстояние между датчиком и отражателем) можно отрегулировать в соответствии с заданными условиями с помощью потенциометра датчика. Пока измеренное время распространения ультразвукового сигнала соответствует расстоянию от датчика до отражателя, устройство находится в неактивном состоянии. Когда объект попадает на расстояние обнаружения, время распространения изменяется, и датчик переходит в активное состояние. Это также позволяет обнаруживать звукопоглощающие и звукоотражающие объекты.
Обнаружение объекта
Стандартный объект/отражатель
Стандартная цель определяется как квадратный ровный объект с длиной края 30 мм (Sde > 1000 мм: длина края 100 мм, Sde ≥ 2500 мм: 300 мм длина края), которая перпендикулярна базовой оси датчика. Отражатель должен быть изготовлен из материала с хорошими звукоотражающими свойствами и иметь как минимум такой же размер, как и цель.
Отражатель должен быть изготовлен из материала с хорошими звукоотражающими свойствами и иметь как минимум такой же размер, как и цель.
Объект на близком расстоянии
Для надежного обнаружения звуковой конус должен быть полностью закрыт, чтобы от отражателя не возвращалось эхо. Необходимый для этого диаметр объекта составляет не менее 30 мм в УРДК 30 и не менее 100 мм в УРАМ 50.
Объект в остальной части рабочего диапазона
Для надежного обнаружения объекта отраженный сигнал должен быть достаточно сильным. Сила отраженного сигнала зависит от размера объекта. Для стандартного объекта или большего размера доступно полное расстояние обнаружения Sd.
Преимущества
- Простое обнаружение даже для 100 % звукопоглощающих материалов
- Надежное обнаружение объектов, отклоняющих звук
- Отсутствие слепых зон перед датчиком для объектов ≥ стандартного объекта
Ультразвуковые датчики сквозного луча
Конструкция и работа
Излучатель и приемник находятся в двух отдельных корпусах. Непрерывный сигнал излучателя улавливается приемником. Объект, прерывающий звуковой луч, заставит приемник отреагировать, подав выходной сигнал. При необходимости пользователь может отрегулировать усиление входного сигнала. Когда объект прерывает звуковой луч, приемник реагирует и выдает выходной сигнал.
Непрерывный сигнал излучателя улавливается приемником. Объект, прерывающий звуковой луч, заставит приемник отреагировать, подав выходной сигнал. При необходимости пользователь может отрегулировать усиление входного сигнала. Когда объект прерывает звуковой луч, приемник реагирует и выдает выходной сигнал.
С помощью встроенного потенциометра пользователь может при необходимости регулировать усиление входного сигнала.
Состояние выходного каскада, а также интенсивность сигнала отображаются светодиодом.
Угол звукового луча α
Угол звукового луча (α) определяет границы испускаемого конического луча ультразвукового датчика сквозного луча.
Повторяемость
Из-за узкого угла звукового луча повторяемость точки переключения двух последовательных целей при идентичных условиях лучше 3 мм.
Гистерезис
Гистерезис — это разница между рабочей точкой (S1) и точкой срабатывания (S2). Если объект прерывает звуковой луч, уровень сигнала должен быть увеличен примерно на 75 %, чтобы сбросить выходной сигнал.
