Как самостоятельно изготовить анемометр для измерения параметров ветра. Какие материалы и компоненты потребуются для создания датчика ветра. Как собрать механическую и электронную части анемометра. Как запрограммировать и откалибровать самодельный датчик ветра.
Принцип работы анемометра и его основные компоненты
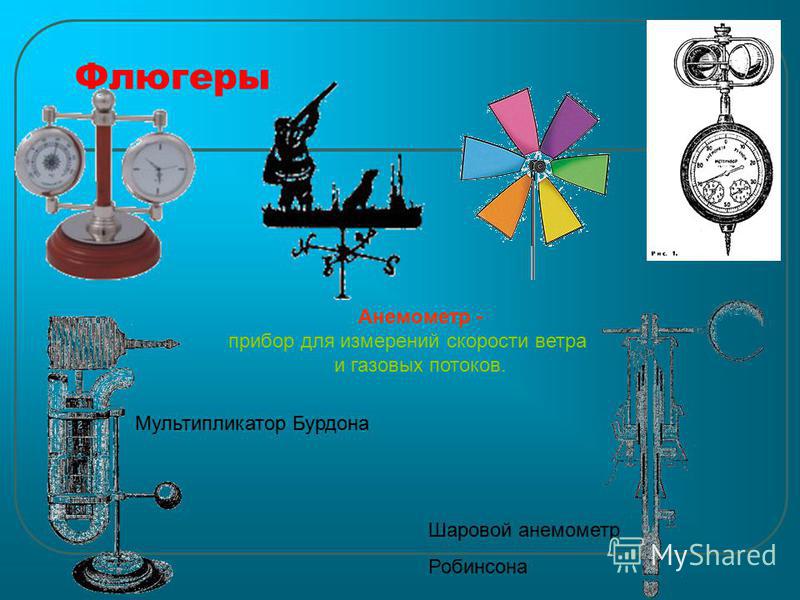
Анемометр — это прибор для измерения скорости и направления ветра. Простейший анемометр состоит из следующих основных частей:
- Ротор с чашками или лопастями, который вращается под действием ветра
- Датчик для измерения скорости вращения ротора
- Флюгер для определения направления ветра
- Датчик положения флюгера
- Электронный блок для обработки данных с датчиков
- Дисплей или интерфейс для вывода измеренных значений
Скорость ветра определяется по скорости вращения ротора — чем сильнее ветер, тем быстрее вращается ротор. Направление ветра фиксируется по положению флюгера относительно корпуса прибора.

Материалы и компоненты для изготовления анемометра
Для самостоятельного изготовления анемометра потребуются следующие материалы и компоненты:
- Пластик или легкий металл для изготовления корпуса и ротора
- Подшипники для обеспечения свободного вращения ротора
- Магниты для датчика скорости вращения
- Датчик Холла для измерения скорости вращения
- Магнитный энкодер для определения положения флюгера
- Микроконтроллер (например, Arduino или ESP32) для обработки данных
- Модуль беспроводной связи (Bluetooth или WiFi) для передачи данных
- Дисплей для вывода измеренных значений
- Аккумулятор или солнечная панель для автономного питания
Многие детали корпуса можно изготовить с помощью 3D-печати, что упрощает процесс создания анемометра своими руками.
Сборка механической части анемометра
Механическая часть анемометра включает в себя следующие основные элементы:
- Ротор с чашками или лопастями для вращения под действием ветра
- Вертикальный вал, на котором закреплен ротор
- Подшипники для обеспечения свободного вращения вала
- Флюгер для определения направления ветра
- Корпус, в котором размещаются все компоненты
При сборке механической части важно обеспечить минимальное трение в подшипниках и сбалансировать ротор, чтобы он легко вращался даже при слабом ветре. Флюгер должен быть достаточно легким и чувствительным, чтобы точно указывать направление ветра.

Электронная начинка самодельного анемометра
Электронная часть анемометра включает следующие основные компоненты:
- Датчик Холла для измерения скорости вращения ротора
- Магнитный энкодер AS5048B для определения положения флюгера
- Микроконтроллер (например, ESP32) для обработки данных с датчиков
- Модуль беспроводной связи для передачи данных
- Аккумулятор или солнечная панель для автономного питания
Датчик Холла фиксирует прохождение магнитов, закрепленных на роторе, и позволяет определить скорость его вращения. Магнитный энкодер AS5048B обеспечивает точное измерение угла поворота флюгера в диапазоне 0-360 градусов. Микроконтроллер обрабатывает данные с датчиков и передает их по беспроводному каналу связи.
Программирование микроконтроллера анемометра
Для программирования микроконтроллера анемометра необходимо выполнить следующие основные задачи:
- Настроить считывание данных с датчика Холла для измерения скорости вращения ротора
- Реализовать считывание угла поворота с магнитного энкодера AS5048B
- Преобразовать полученные данные в значения скорости и направления ветра
- Настроить передачу данных по беспроводному интерфейсу
- Реализовать алгоритмы фильтрации и усреднения данных для повышения точности
Программный код должен обеспечивать стабильную работу анемометра в различных погодных условиях и позволять настраивать параметры измерений. Важно также реализовать функции калибровки прибора для повышения точности измерений.

Калибровка самодельного анемометра
Калибровка анемометра необходима для обеспечения точности измерений. Она включает следующие основные этапы:
- Калибровка датчика скорости ветра:
- Сравнение показаний с эталонным анемометром при различных скоростях ветра
- Построение калибровочной кривой
- Внесение поправочных коэффициентов в программу микроконтроллера
- Калибровка датчика направления ветра:
- Точное выравнивание флюгера относительно сторон света
- Настройка нулевого положения в программе микроконтроллера
- Проверка точности измерения углов во всем диапазоне 0-360 градусов
Правильная калибровка позволяет значительно повысить точность измерений самодельного анемометра и приблизить его характеристики к профессиональным приборам.
Тестирование и доработка анемометра
После сборки и калибровки анемометра необходимо провести его всестороннее тестирование:
- Проверка работоспособности в различных погодных условиях
- Оценка точности измерений при разных скоростях и направлениях ветра
- Тестирование надежности беспроводной передачи данных
- Проверка энергопотребления и автономности работы
По результатам тестирования может потребоваться доработка конструкции или программного обеспечения анемометра. Это может включать:

- Улучшение аэродинамики ротора для повышения чувствительности
- Оптимизацию алгоритмов обработки данных для повышения точности
- Доработку системы питания для увеличения времени автономной работы
- Улучшение защиты от внешних воздействий для повышения надежности
Тщательное тестирование и доработка позволят создать надежный и точный анемометр своими руками.
Измеритель воздушного потока – Поделки для авто
Представляем Вам низко бюджетный анемометр (датчик ветра) от ”Модерн Девайс” (http://moderndevice.com). Этот небольшой датчик, пригодный для разных электронных экспериментов. Такой девайс напомнил мне об автоматическом датчике массового расхода воздуха для автомобиля.
Датчик массового расхода воздуха в автомобиле преобразует количество воздуха, всасываемого в двигатель, в сигнал напряжения для вычисления нагрузки на двигатель. Это необходимо, чтобы определить количество подаваемого в двигатель топлива, управлять углом опережения зажигания, и следовательно, крутящим моментом двигателя. Датчик расхода воздуха расположен непосредственно в потоке всасываемого воздуха, между воздушным фильтром и дроссельной заслонкой, где он измеряет входящий воздух.
Основными компонентами датчика массового расхода воздуха являются термистор, нагреваемая платиновая нить и электронный блок управления. Термистор измеряет температуру поступающего воздуха. Температура платиновой нити поддерживается постоянной по отношению к термистору с помощью электронной схемы управления.
Температура платиновой нити поддерживается постоянной по отношению к термистору с помощью электронной схемы управления.
Увеличение потока воздуха приводит к быстрому уменьшению температуры нити и электронный блок компенсирует это снижение температуры увеличением тока через нить.
Схема электронного контроля одновременно измеряет ток и преобразует его в пропорциональный сигнал напряжения.
Представленный датчик ветра от ”Модерн Девайс” – термоанемометр, основанный на традиционной технике измерения скорости ветра. Это так называемая техника “горячей нити”, которая заключается в поддержке постоянной температуры нити путем ее прогрева проходящим током, а затем измеряется мощность, необходимая для поддержания этой температуры, при изменении потока воздуха.
Измеренная электрическая величина пропорциональна скорости ветра.Это основной принцип, делающий функционирование датчика таким же, как в традиционной технике.
Такой подход дает лучшие результаты при измерении низких и средних скоростей ветра.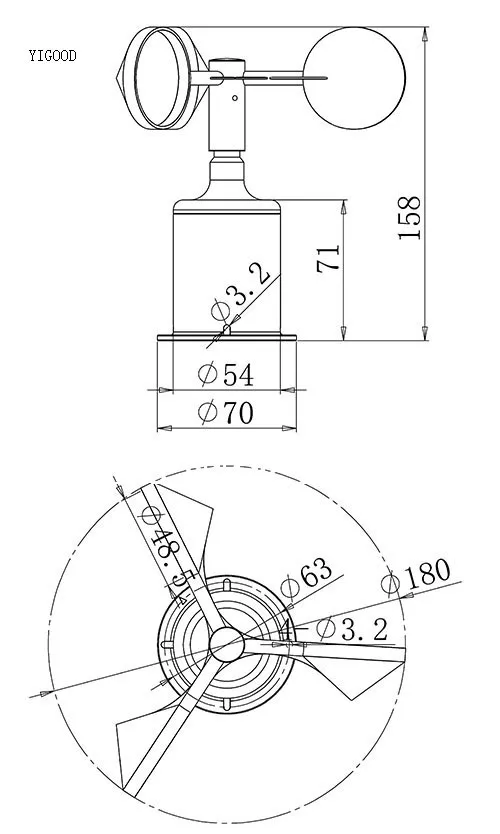
Метод также предпочтителен при измерении потока воздуха в помещениях, где будут неэффективны традиционные вращающиеся лопасти, применяемые на метеостанциях.
Датчик от ”Модерн Девайс”, стоимостью17$, может работать в диапазоне от 5 до 10Вольт напряжения питания. Однако предпочтительнее использовать стабилизированное напряжение 5Вольт при работе в схемах с микроконтроллерами. Согласно спецификации датчик имеет высокую чувствительность, т.е. отреагирует на небольшое движение воздуха на расстоянии 18-24 дюйма (1дюйм=2,54 см). Возможные применения включают в себя измерение дыхания человека, определение проникновения в помещение, измерения на метеостанциях и т.д.
Датчик ветра включает в себя небольшой подстроечный резистор (R9), который используется для калибровки сенсора на значение “нулевого ветра”.При калибровке просто надо прикрыть сенсор (например-стаканом), чтобы избежать любого движения воздуха и установить желаемый нулевой уровень. ”Модерн Девайс” грубо калибрует датчик на выходное напряжение 0. 5Вольт при нулевом ветре (при напряжении питания 6Вольт), но вы можете установить другое значение.
5Вольт при нулевом ветре (при напряжении питания 6Вольт), но вы можете установить другое значение.
Более низкое калибровочное значение (например-0.2Вольт) немного увеличит чувствительность на высоких значениях измеряемого диапазона. Заметим, что при изменении величины питающего напряжения, требуется новая калибровка.
ВНИМАНИЕ!!! не использовать напряжение питания выше 10 Вольт!
Рекомендуется использовать только хорошие стабилизированные источники питания.
Схема датчика ветра, который применяется в новом девайсе.
Значение контактов
• + V источник питания (от 5 до 10Вольт)-если хотите получить наилучший результат, то желательно чтобы напряжение регулировалась.
• Ground: Земля (0Вольт).
• Out: Выходное напряжение. Это напряжение умножается на 3 на RV и подстраивается потенциометром. Это выходное напряжение подвергается влиянию изменения температуры окружающей среды, особенно, при больших отклонениях температуры от той, при которой происходила калибровка. Чувствительность этого выхода может быть изменена путем подбора резистора R11 (4.3K). Высокая чувствительность позволит уменьшить эффект насыщения датчика с изменением температуры окружающей среды.
Чувствительность этого выхода может быть изменена путем подбора резистора R11 (4.3K). Высокая чувствительность позволит уменьшить эффект насыщения датчика с изменением температуры окружающей среды.
• RV: Петля цикла напряжения. Напряжение не будет опускаться ниже примерно 1,8 вольт при комнатной температуре. Это напряжение не зависит от потенциометра калибровки. Выходной сигнал датчика имеет логарифмическую характеристику, что означает, что датчик может захватить очень небольшие движения воздуха в нижнем конце диапазона, но и не насыщается при полной мощности, пока поток воздуха не достигнет примерно 60 миль в час.
• TMP: Температурный выход. Это просто делитель напряжения между резистором и терморезистором. Делитель выдает около 2,8 Вольт при комнатной температуре, это значение опустится при повышении температуры и увеличится при более низких температурах.
Характеристики:
Размеры платы: ”68? ? ”1.590? ? ”25?.
Напряжение питания: от 4 до 10 Вольт.
Потребляемый ток: от 20 до 40 мА (в зависимости от скорости ветра).
Выходной сигнал: аналоговый, 0 VCC.
В статье использованы материалы из технической документации опубликованной
Модерн Девайс и Toyota Motor Sales Inc.
Скачать программу для Ардуино можно здесь.
Точная беспроводная погодная станция с ЖК-дисплеем или как своими руками сделать флюгер
Беспроводной флюгер кроме простого указания направления ветра имеет абсолютный кодовый датчик. Обычные бытовые погодные станции имеют разрешение измерения направления ветра 22,5°, обновляемое каждые 14 секунд. Как самому сделать флюгер в домашних условиях?
В погодной станции, которую я собрал, измерение направления ветра имеет разрешение 0,1°, и обновляется каждую секунду.
Шаг 1: Новый тип флюгера
Я хотел изготовить флюгер на крышу своими руками, который был бы точнее, чем обычный потребительский флюгер и стоил бы дешевле, чем профессиональный. Задумка в том, чтобы использовать недорогой датчик, который по Bluetooth’у пересылал бы данные на дисплей. Частью задумки было сделать самодельный флюгер из металла и дерева, работающий на солнечной энергии. Материалы должны быть доступны и недороги, а также метео- и водостойкими.
Задумка в том, чтобы использовать недорогой датчик, который по Bluetooth’у пересылал бы данные на дисплей. Частью задумки было сделать самодельный флюгер из металла и дерева, работающий на солнечной энергии. Материалы должны быть доступны и недороги, а также метео- и водостойкими.
Шаг 2: Собираем материалы
Для изготовления флюгера своими руками вам понадобятся:
- 8 шарикоподшипников с глубоким желобком 5х16х5мм
- 14 деревянных стержней 0,48х30 см
- Неодимовые магниты 0,6х1,27 см
- Заглушка для медной трубки 1,9 см
- Медная соединительная муфта 1,27 см
- Медная трубка 1,27 см длиной 15 см
- Медная трубка 1,9 см длиной 30 см
- Муфта медная переходная 1,27х1,9 см
- Абсолютный угловой кодовый датчик, шина SPI, SOIC-8, датчик положения MLX90316KDC-BDG-100-RE
- Микроконтроллер ATmega328P-PU, адаптер для программирования DIP-28
- Кварцевый осциллятор 16 МГц
- Конденсаторы 20 пФ
- Модуль Bluetooth HM-10, в качестве ведущего устройства
- Модуль Bluetooth HM-10 с несущей платой и регулятором напряжения
- Отсек на две пальчиковые батарейки (типа АА)
- Штыревой адаптер
- USBasp программатор
- Arduino IDE бесплатное ПО
- ЖК-дисплей 2х16 с последовательным подключением
- Arduino Pro Mini 8 МГц 3.
 3В
3В - Адаптер USB TTL
- Аккумуляторный блок с USB-выходом
- Тактильные кнопки
- Прозрачная пластиковая мыльница, послужит корпусом для дисплея
- Прямоугольный пластиковый корпус для начинки флюгера
Убедитесь, что у плат есть прошивка для HM-модуля. Так же вам понадобятся: провода, 3 транзистора 2N2222, МОП-транзистор IRF9540, резисторы и диоды.
Шаг 3: Проверяем датчик положения MLX90316
Так как я впервые имел дело с этим датчиком, мне нужно было выяснить его чувствительность, чтобы знать, на каком расстоянии от датчика закреплять магнит. Я думал, что если достаточно сильный магнит будет искажать показания датчика, но на практике оказалось, что показания не меняются на расстоянии 1,27 см от прямого контакта.
Так же важно использовать правильную версию датчика – они бывают аналоговые, поддерживающие проприетарный протокол и с шиной SPI. Arduino IDE для этого датчика нужно было обновить, добавьте #include в файле «MLX90316. h». Также в скетче используется библиотека «Metro.h» . Не забудьте, что MOSI и MISO используют одну и ту же кодовую шину числа, в отличии от обычной шины SPI.
h». Также в скетче используется библиотека «Metro.h» . Не забудьте, что MOSI и MISO используют одну и ту же кодовую шину числа, в отличии от обычной шины SPI.
Используйте «test.ino», чтобы проверить работу датчика. Для работы датчик нужно подключить к питанию 5В и земле. Цифровой выход 13 подключается к SCK, цифровой выход 12 (MISO) не подключается, цифровой выход 11 подключается к MOSI, цифровой выход 10 подключается к SS.
Файлы
- test.ino
Шаг 4: Программируем модули HM-10
Модули HM-10 пришли с конфигурацией ведомых, без режима ожидания. При подключении к ведущему устройству, они сразу соединялись с ним, без паролей. Для программирования модулей используйте адаптеры FTDI 232 (работающие на 3,3 В), подключите 3,3 В-вый вывод, GND и Rx к Tx, а Тх к Rx; хорошо, если у вас есть разъем-гнездо на плату, чтобы надеть его на выходы адаптера FTDI, а на выводы гнезда припаять провода, идущие к модулю НМ-10.
Принципиальная схема модуля HM-10 есть в инструкции, диод режима подключается к выходу 24, провод сброса подключается к выходу 23, заземление идет к выходам 13, 14,21, а выход 22 нужно доделать паяльником с тонким жалом (может понадобиться помощь, чтобы держать плату). Вам понадобится терминальная программа, позволяющая посылать АТ-команды, для изменения конфигурации.
Программируйте ведомые устройства:
- MODE 2 (Режим 2), данные и АТ-команды в том же потоке данных. Отправьте AT+MODE2
- PWRM 0, режим ожидания, отправьте AT+PWRM0
- ROLE 0, ведомое/удаленное/периферийное устройство, отправьте AT+ROLE0
- PCTL 1, установка режима питания, максимально возможное значение напряжения. Отправьте AT+PCTL1
- FLOW 0, выключение управления потоком данных, отправьте AT+FLOW0
- ADDR ?, вам необходимо узнать MAC-адрес устройства, и записать его. Используется для установления CONN ведущим устройством. Отправьте AT+ADDR?
- CONN XXYYZZ и т.
 д., устанавливает соединение ведомого устройства с МАС-адресом ведущего устройства. Отправьте AT+CON22C22FF22DA2[МАС-адрес устройства]
д., устанавливает соединение ведомого устройства с МАС-адресом ведущего устройства. Отправьте AT+CON22C22FF22DA2[МАС-адрес устройства] - BAUD 0, по умолчанию скорость передачи данных составляет 9600 бод (максимально возможная у ATtiny85 скорость передачи данных). Отправьте AT+BAUD0
- POWE 2, мощность сигнала 0 дБ/мВт, отправьте AT+POWE2
- TYPE 0, убедитесь, что не используется пароль, отправьте AT+TYPE0
- VERS ?, узнать версию. У меня была версия v540, отправьте AT+VERS?
Программируйте ведущее устройство:
- MODE 2, данные и АТ-команды в одном потоке данных. Отправьте AT+MODE2
- PWRM 1, нет режима ожидания (ведущее устройство переходит в спящий режим), отправьте AT+PWRM1
- ROLE 1, ведущее/центральное устройство, отправьте AT+ROLE1
- PCTL 1, установка режима питания, максимально возможное значение напряжения. Отправьте AT+PCTL1
- FLOW 0, выключение управления потоком данных, отправьте AT+FLOW0
- ADDR ?, вам необходимо узнать МАС-адрес данного устройства, и записать его.
 Используется для подключения устройства (из списка) как ведомого. Отправьте AT+ADDR?
Используется для подключения устройства (из списка) как ведомого. Отправьте AT+ADDR? - CONN XXYYZZ, позволяет подключиться к МАС-адресу ведомого устройства, отправьте AT+CON22C22FF22DA2 [МАС-адрес устройства]
- BAUD 0, по умолчанию скорость передачи данных 9600 бод (максимально возможная у ATtiny85 скорость передачи данных). Отправьте AT+BAUD0
- POWE 2, мощность сигнала 0 дБ/мВт по умолчанию, отправьте AT+POWE2
- TYPE 0, убедитесь, что не используется пароль. Отправьте AT+TYPE0
- VERS ?, узнать версию. У меня была версия v540, отправьте AT+VERS?
- У версии v540 устройства не соединяются автоматически при включении питания. Вместо этого программа посылает команду CONN XXYYZZ при каждом включении дисплея.
- Еще интересные АТ-команды:
- TEMP ? отправьте AT+TEMP? для получения значения температуры
- RSSI ? запрос уровня принимаемого сигнала — AT+RSSI?
- BATT ? заряд батареи (имеет аналого-цифровой преобразователь!), отправьте AT+BATT?
- PIO4, PIO7 и т.
 д. – установка или сброс выходных сигналов (в этой статье не используется, но вообще может пригодиться). Контроллер Atmega328P выходит из спящего режима при получении любых последовательных данных с выхода Tx модуля HM-10 через резистор 10 кОм на вывод аппаратного прерывания INT0.
д. – установка или сброс выходных сигналов (в этой статье не используется, но вообще может пригодиться). Контроллер Atmega328P выходит из спящего режима при получении любых последовательных данных с выхода Tx модуля HM-10 через резистор 10 кОм на вывод аппаратного прерывания INT0.
Шаг 5: Механическая и электронная составляющие погодной станции
Показать еще 7 изображений
Устанавливаем датчик
Погодная станция сделана на базе контроллера Atmega 328p и кристаллов 16МГц, установленных на куске перфорированной платы, и запрограммированных через usbasp-программатор. Датчик MLX90316 посылает данные о направлении напрямую на контроллер, где они преобразуются в последовательные данные ТТЛ-схемами, которые отправляются модулем Bluetooth HM-10 на ЖК-дисплей.
Если вы используете usbasp-адаптер, вам нужно установить модуль питания 3,3-5 В на 5 В, чтобы загрузка прошла нормально. Для работы контроллера 328р вам нужно записать загрузчик операционной системы в инструментах. При загрузке скетча сначала в панели Инструменты выберите плату Pro Mini с чипом 328р и usbasp в качестве программатора. Затем перейдите во вкладку скетча и загрузите его через программатор (а не через кнопку).
При загрузке скетча сначала в панели Инструменты выберите плату Pro Mini с чипом 328р и usbasp в качестве программатора. Затем перейдите во вкладку скетча и загрузите его через программатор (а не через кнопку).
Датчик закреплен на плате адаптера, который как раз вплотную поместился в отрезке медной трубки 1,9 см. угла адаптера в просвете трубы закрепит супер клеем. Можно оставить секцию трубы с датчиком незафиксированной в тройнике, чтобы он мог вращаться и при установке запомнить положение севера. Фольгированным скотчем защитите секцию с датчиком от попадания воды.
Собираем механическую часть
Флюгер вращается с помощью двух шарикоподшипников. Для снижения трения с подшипников нужно снять уплотнители и очистить их от смазки. Часовой отверткой вскройте оболочку подшипников и добавьте немного wd-40, чтобы убрать смазку. Для смазки используйте маловязкое масло. Деревянный стержень – это ось, на один конец которой приклеиваем магнит. Стержень вставляется в верхнюю заглушку трубки, и вставляется в трубку, которую припаиваем к заглушке.
Затем просверливаем трубку и стержень и закрепляем винтиком и гайкой. Флюгер вклеиваем в трубку эпоксидкой.
Постарайтесь сделать флюгер как можно более легким. При балансировке оставьте длиннее плечо с хвостом, чем с указателем-противовесом. Для того, чтобы вам легче было придумать оптимальную конструкцию, даю вам фотографии погодного поля в Санта-Монике, Калифорнии (это арт-инсталляция).
Файлы
- ATtiny85_Hummingbird_Bluetooth_SLEEP_net1_1_Wind1.ino
Шаг 6: Устанавливаем и программируем дисплей
Приклейте на термоклей Arduino Pro Mini к палочке от мороженного, а палочку от мороженного в ЖК-дисплею, так, чтобы контроллер находился над контактами дисплея. По схеме сделайте на кусочке перфорированной платы кнопку включения/выключения, которую подключите к выводу земле и к входу необработанных данных контроллера Pro Mini, и контрольным линиям выводов 5 6 этого же контроллера. Подключите минус и землю кнопки к кнопке, закрепленной на корпусе. Кнопку на плате приклейте термоклеем к дисплею.
Из-за того, что дисплею нужно напряжение 5 В, а датчику – 3,3В, я использовал Pro Mini с встроенным понижающим преобразователем. Это упростило взаимодействие с логическим уровнем между контроллером и датчиком, и даже с устройствами I2C (I2C компоненты 5 В подключаются к выводам SDA и SCL I2C-шины 3В контроллера Pro Mini), в то же время давая дисплею необходимые 5 В.
Внешний аккумулятор c USB-разъёмом я выбрал из-за легкости его перезарядки через USB, из-за того, что он хорошо поместился в корпус станции (мыльницу). USB-коннектора пришлось отрезать (чтобы все поместилось в мыльницу) и соединить провода с коннектором и с контактами схемы-кнопки.
Для монтажа дисплея на крышке мыльницы аккуратно просверливаем 4 отверстия в крышке, и закрепляем дисплей 4-мя миниатюрными винтиками 1,27 см и соответствующими гайками. Просверлите отверстия для кнопки включения, и закрепите ее герметиком. Осторожно нанесите эпоксидку на верхнюю и нижнюю поверхность тумблера и дайте ей застыть. Подключайте компоненты согласно схеме.
Подключайте компоненты согласно схеме.
Программируйте Pro Mini через FTDI-адаптер, подключенный к разъему программатора.
Расположите датчик так, чтобы антенна была направлена к передней стороне корпуса, свободной от металлических деталей или проводов, и чтобы диод датчика был виден. Термоклеем приклейте датчик к дисплею.
Файлы
- Hummingbird_Bluetooth_1_1_Wind.ino
Шаг 7: Результаты испытаний
Угловой датчик достаточно точный. Дисплей работает отлично, связь с датчиком устойчивая.
В дальнейшем я планирую добавить панель для зарядки трех никель-металлгидридных аккумуляторов от солнца.
HowTo: Anemosens — Создайте 3D-печатный датчик ветра / анемометр — Nerdiy.de
Честно говоря, идея 3D-печатного датчика ветра (на техническом жаргоне «анемометр») витала в моей голове уже давно. .
Изначально я мог бы использовать его как датчик ветра для одной из моих метеостанций. В то время у меня был в наличии 3D-принтер FDM, а также несколько первых идей для дизайна для печати.
В то время у меня был в наличии 3D-принтер FDM, а также несколько первых идей для дизайна для печати.
Затем я распечатал дизайн, показанный слева, и протестировал его.
К сожалению, этот проект так и не прошел стадию прототипа. Ограничения процесса печати FDM были здесь несколько проблематичными. Особенно при печати нависающих структур допуски часто были настолько плохими, что детали не подходили друг к другу должным образом.
Так что я снова отложил проект. Но когда я начал разрабатывать вторую версию 3D-печатной турбины wnd , тема анемометра вернулась на мой стол. На этот раз я хотел построить ветряк с электронным отслеживанием ветра. Это означает, что WinDIY_2 (так называется ветряк) не должен иметь флюгера, который автоматически выравнивает гондолу по ветру. Вместо этого гондола должна поворачиваться против ветра с помощью серводвигателя. Чтобы это работало, электроника, конечно же, должна знать текущее направление ветра. Конечно, это работает только в том случае, если электроника способна измерить текущее направление ветра.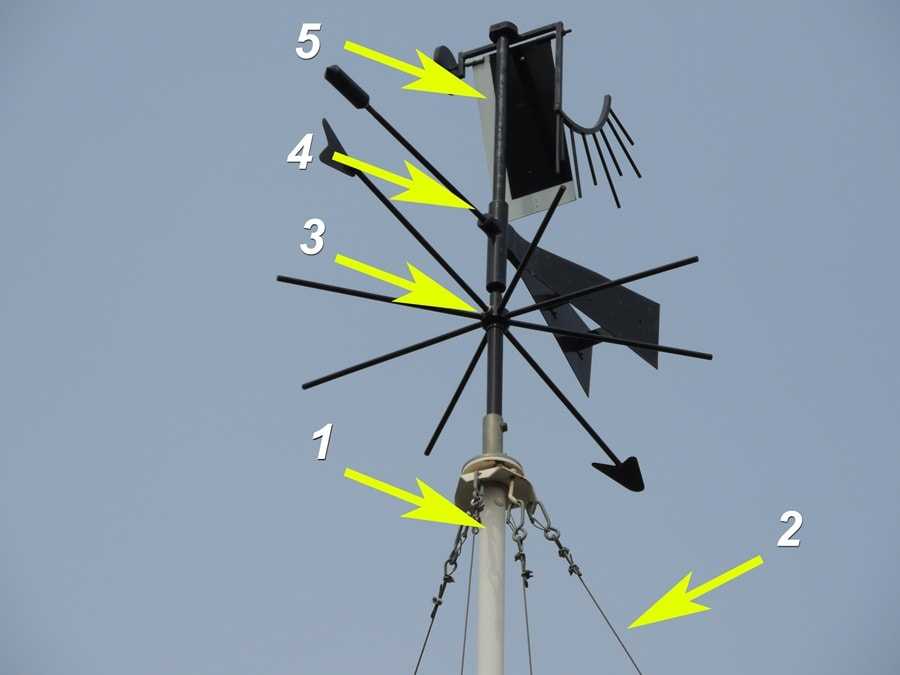 Вы, наверное, уже знаете, к чему все идет: так (снова) родилась идея разработать анемометр для 3D-печати.
Вы, наверное, уже знаете, к чему все идет: так (снова) родилась идея разработать анемометр для 3D-печати.
К этому времени мой «машинный парк» уже немного подрос. В дополнение к моему принтеру FDM теперь я мог также использовать принтер SLA. Практический момент заключается в том, что с помощью принтеров SLA вы также можете очень хорошо печатать нависающие конструкции и, как правило, с гораздо более высоким разрешением, чем с принтерами FDM. С производственной стороны почти все проблемы были решены. 🙂
Таким образом, анемометр должен был быть как можно компактнее, потому что в этот момент следует избегать лишнего веса (и потому, что он просто выглядит круче. 🙂 )
Для интеграции в WinDIY_2 анемометр необходимо закрепить на небольшой штанге на гондоле ветряка.
Первый набросок выглядел так, как показано на фото. Немного «пухленький» и еще со съемным наконечником.
В целом, к сожалению, все еще слишком велик для дизайна WinDIY_2. Так что я вернулся к столу.
После еще нескольких набросков дизайн, показанный слева, в конце концов получился.
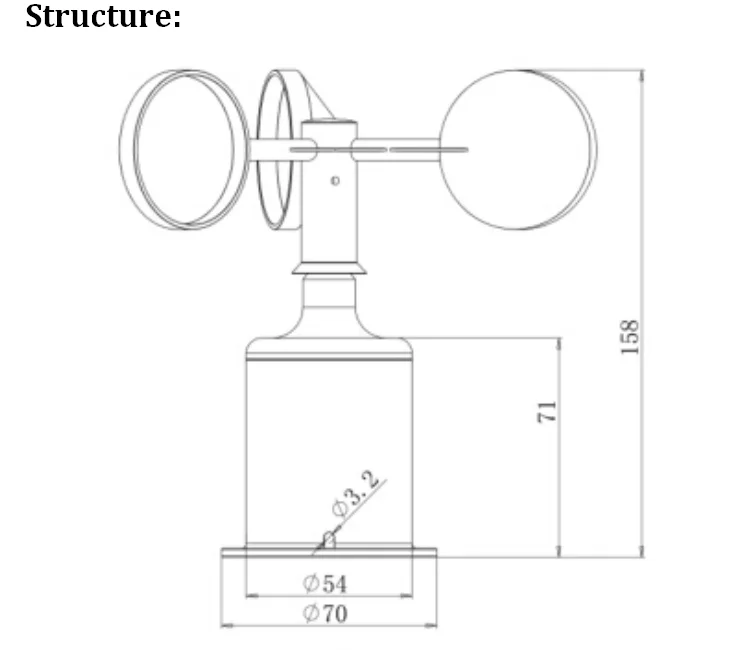
Очень компактный анемометр со следующими данными:
- Диаметр основания: 27 мм
- Диаметр ротора: 150 мм
- Высота (включая основание): ~160 мм
Эта конструкция состоит из нескольких частей, которые можно распечатать на стандартном SLA-принтере.
Поперечный разрез анемосенс.Чтобы иметь возможность оценивать измеренные значения скорости и направления ветра, я создал небольшую плату датчиков, которую можно интегрировать в основание таким образом, чтобы датчики располагались точно в нужных местах. Затем сенсорную плату можно подключить к ESP32 через дополнительную дополнительную плату (печатную плату Anemosens_MCU). Затем данные могут быть дополнительно обработаны или сохранены различными способами.
На печатной плате Anemosens_MCU доступны различные интерфейсы и слот для SD-карты. Дополнительную информацию об этой плате также можно найти по следующей ссылке.
- Печатная плата – сборка платы Anemosens_MCU
Общая структура Anemosens описана в следующей статье.
Следующая галерея также содержит несколько изображений используемых печатных плат и общей конструкции.
Вы можете увидеть больше информации в следующем видео.
В этом видео также показана структура печатной платы датчика Anemosens.Инструкции по технике безопасности
Я знаю, что следующие советы всегда немного раздражают и кажутся ненужными. Но, к сожалению, многие люди, знавшие его «лучше», по неосторожности лишились глаз, пальцев или других вещей или ушиблись. Для сравнения, потеря данных почти не стоит упоминания, но даже они могут быть очень раздражающими. Поэтому, пожалуйста, найдите пять минут, чтобы прочитать инструкции по технике безопасности. Даже самый крутой проект не стоит травм или других неприятностей. https://www.nerdiy.de/en/sicherheitshinweise/
Поэтому, пожалуйста, найдите пять минут, чтобы прочитать инструкции по технике безопасности. Даже самый крутой проект не стоит травм или других неприятностей. https://www.nerdiy.de/en/sicherheitshinweise/
Партнерские ссылки / рекламные ссылки
Приведенные здесь ссылки на интернет-магазины являются так называемыми партнерскими ссылками. Если вы нажимаете на такую партнерскую ссылку и совершаете покупки по этой ссылке, Nerdiy.de получает комиссию от соответствующего интернет-магазина или провайдера. Цена для вас не меняется. Если вы будете совершать покупки по этим ссылкам, вы поддержите Nerdiy.de, чтобы иметь возможность предлагать новые полезные проекты в будущем. 🙂
Требования
Для строительства вы должны освоить задачи пайки. В следующих статьях приведены советы о том, как это сделать.
- Electronics—My friend the soldering iron
- Electronics – Solder THT components by hand
- Electronics – Solder SMD components by hand
Required tools:
| Количество | item | Link |
|---|---|---|
| 1x | soldering iron | Buy at Amazon |
| 1x | USB soldering iron | Buy at Amazon |
| 1x | third hand | Buy at Amazon |
| 1x | Очиститель паяльных наконечников | Купить на Amazon |
| 1x | Пистолет для горячего клея | Купить на Amazon | 14141x | SLA 3D Printer | Купить на Amazon |
| 1x | M2. внутренний метчик внутренний метчик | Купить на Amazon |
| 1x | Внешний метчик M8 | Купить на Amazon |
| 1x | Отвертка Torx Покупатель 9116 9 на Amazon |
Required material:
| Quantity | item | Link |
|---|---|---|
| 1x | M2x6 grub screw | Buy at Amazon |
| 6x | M2x6 countersunk screw | |
| 3x | Установочный винт M3x6 | Купить на Amazon |
| 1x | Винт с потайной головкой M3x50 | 9 Купить на Amazon0116 |
| 6x | M2 threaded insert | Buy at Amazon |
| 3x | M3 thread insert | Buy at Amazon |
| 3x | Cylinder magnet 5x2mm | Buy at Amazon |
| 1x | Цилиндрический магнит 10×5 мм | https://www. supermagnete.de/scheibenmagnete-neodym/scheibenmagnet-10mm-5mm_S-10-05-DN supermagnete.de/scheibenmagnete-neodym/scheibenmagnet-10mm-5mm_S-10-05-DN |
| 1x | 621 шарикоподшипники16 | Buy at Amazon |
| 2x | 608 ball bearings | Buy at Amazon |
| 1x | JST SH connection cable | Buy at Amazon |
| 1x | 3D printer resin | Buy at Amazon |
| 1x | glue | Buy at Amazon |
| 1x | 10x2mm aluminum tube | Buy at Amazon |
| 1x | solder | Buy at Amazon |
| 1x | USB power supply | Buy at Amazon |
| 1x | USB-C cable | Buy at Amazon |
Build the sensor board
An important компонентом для записи данных о ветре является сенсорная плата Anemosens. На нем установлен датчик Холла и AS5048B («магнитный датчик поворота»). Скорость ветра измеряется датчиком Холла. Направление ветра измеряется AS5048B.
Дополнительную информацию о сенсорной плате можно найти в следующей статье.
- Печатная плата — сборка платы датчика Anemosens
Структуру печатной платы очень хорошо видно на следующем видео с 50-й секунды.
Проводка платы датчика анемозовДатчик направления ветра
Датчик AS5048B можно считывать через шину I2C. Выводится число градусов от 0 до 360°. Разрешение AS5048B составляет 14 бит, что соответствует 0,0219°. Чтобы присвоить количество градусов точке компаса, датчик, конечно, должен быть выровнен или откалиброван соответствующим образом.
Дополнительную информацию об AS5048B можно найти здесь: https://ams.com/en/as0548b
Датчик скорости ветра
Скорость ветра оценивается с помощью линейного датчика Холла Ah59E. Это обнаруживает прохождение трех магнитов, встроенных в ротор. Каждый раз, когда один из магнитов проходит датчик, это можно измерить как изменение аналогового выходного напряжения датчика. Из соображений симметрии в роторе установлены три магнита. Это означает, что количество обнаруженных импульсов необходимо снова разделить на три, чтобы можно было определить время одного оборота. Это число оборотов, в свою очередь, можно использовать для определения скорости ветра. Для получения точных показаний необходимо откалибровать измеренное значение с реальной скоростью ветра.
Производство печатных плат
Всю информацию, необходимую для производства печатных плат, можно найти здесь:
- https://www.pcbway.com/project/shareproject/Anemosens_sensor_PCB.
 html 7 9 хороший обзор того, какие компоненты и где находятся на печатной плате в следующем параграфе. Благодаря работе OpenScope Project вы можете создавать очень полезные HTML-файлы, в которых вы можете непосредственно видеть, какие компоненты должны быть установлены на печатной плате.
html 7 9 хороший обзор того, какие компоненты и где находятся на печатной плате в следующем параграфе. Благодаря работе OpenScope Project вы можете создавать очень полезные HTML-файлы, в которых вы можете непосредственно видеть, какие компоненты должны быть установлены на печатной плате. - https://github. com/Nerdiyde/Anemosens/blob/main/PCB/anemosens_sensor_pcb_v1.1_bom.html
- https://github. com/Nerdiyde/Anemosens/tree/main/STLs
- 1 винт с потайной головкой M2x6
- 6 винтов с потайной головкой M2x6
- 3 винта с потайной головкой M3x6
- 1 винт с потайной головкой M3x50
- 6 резьбовых вставок M2
- 3 резьбовых вставки M3
- 3 цилиндрических магнита 5×2 мм (диаметр: 5 мм, высота: 2 мм)2 1×5 мм высота цилиндра 1 метр магнита
- : 5 мм) диаметрально намагничены!
- 1x 623 шарикоподшипник
- 2x 608 шарикоподшипник
- Соединительный кабель JST SR
- Детали, напечатанные на 3D-принтере
- Печатная плата — Сборка платы Anemosens_MCU
- https://www.pcbway.com/project/shareproject/Anemosens_MCU.html
- https://github. com/Nerdiyde/ Anemosens/blob/main/PCB/anemosens_mcu_v1.3_bom.html
- https://github.com/Nerdiyde/Anemosens/tree/main/software/anemosens_mcu
- Советы и рекомендации ArduinoIDE
- 4 бумажных стаканчика
- Гофрированный картон
- Чертежная кнопка
- Пистолет для горячего клея или степлер
- Ножницы
- Красочная лента
- Элементы для прядения на ваш выбор (см. указания ниже).
- Разберите старую ручку и наденьте полую пластиковую часть на конец тонкого деревянного стержня, убедившись, что есть достаточно места, чтобы часть ручки могла вращаться вокруг стержня.
- С помощью кнопки прикрепите центр картонного креста к концу корпуса ручки.
- Затем воткните свободный конец деревянного стержня в кусок глины или пластилина. (Мы оставили наше пластилин в контейнере.)
- Проверьте наличие пластикового контейнера высотой не менее 2 1/2–3 дюймов (6,3–7,5 см) с крышкой. Кончиком ножниц сделайте отверстие в центре крышки контейнера. Отверстие должно быть чуть больше ширины карандаша.
- Чертежной кнопкой прикрепите центр картонного креста к ластику карандаша.
- Вставьте свободный конец карандаша в отверстие крышки контейнера.
Вы можете увидеть обзор платы датчика Anemosens здесь: Плата датчика Anemosens
Вы также можете найти текущий файл в репозитории GIT по следующей ссылке:
(Обратите внимание, что для его просмотра необходимо загрузить HTML-файл. Это невозможно напрямую из репозитория GIT.)
Соберите необходимые материалы.
Прежде чем вы сможете начать, вы, конечно же, должны собрать все необходимые отдельные детали.
Файлы STL для 3D-печати необходимых деталей можно найти в репозитории Anemosens Git по адресу:
для сборки потребуются следующие детали:
Далее необходимые отдельные детали снова показаны в галерее.
В этом примере магниты 2×5 мм уже установлены в предназначенные для этого карманы ротора.
Просто поместите магниты в кармашки и заклейте отверстия небольшим количеством клея.
Подготовьте держатели магнитов
Держатель магнитов удерживает цилиндрический магнит размером 10×5 мм непосредственно над датчиком AS5048B. Он вращательно соединен с флюгером с помощью винта M3x50 мм. На этом этапе вы должны подготовить держатель магнита.
Вам понадобятся детали, показанные слева.
Сначала вставьте винт M3x50, как показано на рисунке, и ввинтите его в кронштейн до упора.
Если шуруп вкручивается с трудом, необходимо снова вырезать отверстие метчиком M3.
Затем вверните винт M3x50 до упора.
Другой вид ввернутого винта M3x50.
Теперь можно приклеить цилиндрический магнит 10×50 в держатель.
Для этого капните каплю клея в держатель и вдавите магнит в держатель.
Внимание! Обратите внимание, что этот магнит должен быть намагниченным по диаметру. В противном случае AS5048B не сможет обнаружить вращение.
Цилиндрический магнит должен сидеть заподлицо в кронштейне.
Вставьте шарикоподшипники в компоненты
Прежде чем продолжить сборку остальных компонентов, их следует подготовить. На этом этапе шарикоподшипники вставляются в напечатанные на 3D-принтере детали.
Однако перед этим необходимо очистить все шариковые подшипники от смазки для подшипников и заменить их машинным маслом для легкого хода. Производители часто поставляют шариковые подшипники, покрытые консистентной смазкой. Это на самом деле полезно для защиты деталей подшипника от коррозии и обеспечения их бесперебойной работы. К сожалению, это также увеличивает начальный крутящий момент и сопротивление вращению.
Для того, чтобы сохранить его как можно ниже, вы должны удалить застойную смазку подшипников. Чтобы подшипник все еще был защищен от коррозии впоследствии, вы должны законсервировать подшипник с машинным маслом (как известно, например, от швейных машин).
Подготовленные таким образом подшипники можно использовать для сборки подшипника.
Для этого вставьте первый из шарикоподшипников 608 в ротор.
Подшипник должен тогда …
… сидеть заподлицо. На этом этапе вам не нужно закреплять его дальше.
Затем вы можете вставить другой шарикоподшипник 608 в держатель на флюгере.
Это всего лишь проверка, чтобы убедиться, что все в порядке. Затем вам нужно снова снять подшипник с держателя в флюгере.
Итак, установите подшипник прямо на кронштейн…
…и вставьте его, пока он…
… не сядет заподлицо в кронштейне.
На этом этапе вы уже можете зафиксировать подшипник с помощью резьбового штифта M2x6.
При необходимости следует сначала нарезать резьбу метчиком М2.
Другой вид.
Затем можно просто прикрепить оставшийся шарикоподшипник 623 к винту с потайной головкой M3x50 держателя магнита.
Другой вид.
Соберите подготовленные детали
Затем вы можете собрать детали, подготовленные на предыдущем шаге.
Для этого вам понадобятся указанные детали.
Сначала поместите ротор с шарикоподшипником на ось основания…
…пока ротор не сядет на ось, как показано на рисунке.
Затем установите распорное кольцо, показанное на оси.
Не позднее этого момента вы должны снять подшипник 608 с держателя флюгера.
Затем поместите этот подшипник на ось основания, как показано на рисунке.
Затем закрепите подшипники показанной стопорной гайкой.
Важно: Не применяйте здесь слишком большое усилие / крутящий момент! При необходимости (обязательно рекомендуется в зависимости от качества печати) следует перенарезать наружную и внутреннюю резьбу М8 метчиком!
Затем откручивайте стопорную гайку до тех пор, пока шарикоподшипники не будут надежно закреплены на главной оси.
Теперь можно снова установить флюгер на ранее установленный шариковый подшипник 608…
… и зафиксировать его…
… с помощью резьбового штифта M2x6.
На последнем этапе держатель магнита соединяется с флюгером.
Для этого необходимо (только) смочить наконечник винта с потайной головкой M3x50 небольшим количеством стопорного лака.
Здесь важно, чтобы на резьбу флюгера попало немного стопорного лака. При необходимости можно также снова снять флюгер и капнуть фиксирующую краску прямо в отверстие с резьбой. В любом случае следите за тем, чтобы на шарикоподшипники не попала фиксирующая краска.
Вид отверстия, в которое необходимо вставить держатель магнита.
Затем поместите держатель магнита таким образом, чтобы прикрепленный шарикоподшипник 623 скользнул в предусмотренный карман. Затем удерживайте магнитодержатель и одновременно поворачивайте флюгер до тех пор, пока винт M3x50 не захватит резьбу флюгера и не будет вкручен до упора.
Вы также можете увидеть весь процесс в этом видео, начиная с 95-й секунды.
Полностью привинченный, полностью собранный держатель магнита должен сидеть в основании, как показано на рисунке.
Вставьте плату датчика в гнездо
Теперь, когда вы собрали большую часть корпуса датчика, можно приступить к сборке основания.
Для этого вам понадобятся предметы, показанные слева.
Резьбовые вставки M2 и M3 уже вставлены в гнездо.
Для этого были вплавлены М2 в держатель сверху и в верхнем ряду снаружи.
Резьбовые вставки M3 вплавлены в нижний ряд доступных снаружи отверстий.
Другой вид вплавленных резьбовых вставок.
В верхнем ряду вставляются вставки М2.
В нижнем ряду вставки М3.
Теперь можно подключить соединительный кабель JST SH к разъему на корпусе датчика.
Затем протяните кабель подготовленной сенсорной платы через отверстие в основании…
… и прикрутите плату к основанию винтами с потайной головкой M2x6, как показано на рисунке.
Соберите корпус с основанием
На последнем шаге вам нужно только соединить розетку с остальной частью корпуса.
Для этого вставьте гнездо в основание датчика, как показано на рисунке.
Затем совместите отверстия в основании с отверстиями/резьбовыми вставками в основании…
…и прикрутите основание к основанию с помощью трех винтов с потайной головкой M2x6.
При желании вы также можете вставить в основание трубу диаметром 10 мм (внешний диаметр) в этом месте…
…и зафиксировать ее с помощью…
… установочных винтов M3x6.
Полностью собранный ваш анемосенс теперь должен выглядеть так. 🙂
Чего еще не хватает, так это подключения к подходящему MCU, который затем должен оценивать и обрабатывать сигналы датчиков.
Дополнительно: сборка платы Anemosens_MCU
Монтажная плата Anemosens MCU не является абсолютно необходимой для работы Anemosens. Вы также можете оценить датчики на плате датчиков с помощью собственного оборудования.
С помощью печатной платы MCU Anemosens у вас есть возможность считывать данные датчика и отправлять их через соединение USB-C, Modbus, Wi-Fi или Bluetooth для дальнейшей оценки. Опционально данные также могут быть сохранены на карте µSD, вставленной в слот для карты µSD. Затем данные могут быть зарегистрированы с отметкой времени с помощью встроенных часов реального времени с буферизацией от батареи. Плата также может быть оснащена BME280 для дальнейшего мониторинга данных об окружающей среде. Температура, влажность и атмосферное давление также могут быть зарегистрированы.
Дополнительную информацию о плате Anemosens_MCU можно найти в статье
В следующем абзаце показан простой способ получить хорошее представление о том, какие компоненты расположены на печатной плате. Благодаря работе OpenScope Project , вы можете создавать очень полезные HTML-файлы, в которых вы можете непосредственно видеть, какие компоненты должны быть установлены на печатной плате.
Печатную плату сенсора можно увидеть здесь: Печатная плата Anemosens_MCU
Вы также можете найти текущий файл в репозитории GIT по следующей ссылке:
(Обратите внимание, что для его просмотра необходимо загрузить HTML-файл. Это невозможно напрямую из репозитория GIT.)
Прошивка Anemosens_MCU
Первая версия (в разработке) Arduino-совместимого программного обеспечения. для оценки данных датчика можно найти по следующей ссылке.
Это программное обеспечение предназначено для использования с оборудованием Anemosens_MCU. Таким образом, данные могут быть измерены, обработаны и сохранены. Они также доступны (при желании) через последовательный интерфейс (через USB), через интерфейс Modbus, через WiFi или через Bluetooth.
Прошивка совместима с Arduino IDE и может быть перенесена на используемый микроконтроллер.
Советы по программированию микроконтроллера с помощью Arduino IDE вы можете найти в статье
Удачи с проектом
Надеюсь, все сработало, как описано. Если нет или у вас есть другие вопросы или предложения, дайте мне знать в комментариях. Также всегда приветствуются идеи для новых проектов. 🙂
Если нет или у вас есть другие вопросы или предложения, дайте мне знать в комментариях. Также всегда приветствуются идеи для новых проектов. 🙂
P.S. Многие из этих проектов, особенно аппаратные, требуют много времени и денег. Конечно, я делаю это, потому что мне это нравится, но если вы цените то, что я делюсь с вами этой информацией, я был бы рад небольшому пожертвованию на кофейную коробку. 🙂
Gefällt mir:
Gefällt mir Wird geladen …
Как сделать анемометр
Когда дело доходит до практического обучения, дети всех возрастов очень любят заниматься инженерией STEM, особенно когда они очень любят инженерные науки. затем используйте предмет.
Весна — идеальное время для изучения погоды, особенно ветра.
Вашему ребенку будет интересно узнать , как сделать анемометр из картона и бумажных стаканчиков.
После того, как вы закончите этот самодельный анемометр, вы можете продолжить изучение погоды с некоторыми другими действиями метеорологического модуля.
Изучите типы облаков и узнайте, как сделать облако в банке, или попробуйте это очень простое занятие с дождевыми облаками.
Как сделать анемометр
Для вашего удобства ниже приведены партнерские ссылки.
Необходимые материалы:
Чтобы сделать самодельный анемометр, начните с разрезания гофрированного картона на 2 полосы шириной примерно 1,5 дюйма и длиной 12 дюймов (3,8 x 30,5 см).
Используйте горячий клей или степлер, чтобы соединить 2 куска картона вместе, чтобы они образовали крест. Постарайтесь максимально центрировать детали, чтобы у вас было одинаковое количество картона с каждой стороны.
Когда закончите, используйте красочную ленту, чтобы украсить один из ваших бумажных стаканчиков. Вы также можете использовать бумажный стаканчик другого цвета, но по размеру близкий к другим стаканчикам. (Это то, что мы сделали.)
Вы также можете использовать бумажный стаканчик другого цвета, но по размеру близкий к другим стаканчикам. (Это то, что мы сделали.)
Затем прикрепите скобами или горячим клеем каждый бумажный стаканчик к концам картонного креста. Убедитесь, что все чашки обращены в одном направлении!
Как сделать анемометр
Чтобы сделать вращающуюся часть самодельного анемометра, у вас есть несколько вариантов. Первый вариант — это то, что лучше всего подходит для нас.
Вариант 1. Используйте старую ручку и стержень.
Вариант 2. Используйте новый карандаш и пластиковый контейнер с крышкой.
Используйте новый карандаш и пластиковый контейнер с крышкой.
Самодельный анемометр
После сборки самодельного анемометра вы можете взять его на улицу, чтобы проверить скорость ветра.
Мы поставили свои на стол для пикника.
Чтобы измерить скорость ветра, установите таймер на 1 минуту и подсчитайте, сколько раз ваш разноцветный стаканчик совершает круговое движение.
Если ваша чашка совершит 10 оборотов за одну минуту, скорость ветра составит приблизительно 1 милю в час. Если он делает обороты 20 раз в минуту, скорость ветра составляет 2 мили в час и т.
