Какие бывают типы датчиков для роботов. Как выбрать подходящий датчик для робота. Каковы основные характеристики датчиков в робототехнике. Почему датчики важны для функционирования роботов.
Типы датчиков для роботов: обзор основных категорий
Датчики являются важнейшими компонентами любого робота, позволяя ему воспринимать окружающую среду и собственное состояние. Рассмотрим основные типы датчиков, применяемых в современной робототехнике:
Контактные датчики
Контактные датчики реагируют на непосредственное физическое взаимодействие с объектами. К ним относятся:
- Кнопки и контактные выключатели — простейшие датчики для обнаружения касания или столкновения
- Датчики давления — измеряют силу, приложенную к поверхности робота
Дистанционные датчики
Дистанционные датчики позволяют роботу получать информацию об окружающих объектах без прямого контакта:
- Ультразвуковые датчики — измеряют расстояние с помощью отраженных звуковых волн
- Инфракрасные датчики — определяют расстояние по отраженному ИК-излучению
- Лазерные дальномеры — высокоточное измерение расстояния лазерным лучом
- Стереокамеры — формируют 3D-изображение окружающего пространства
Датчики позиционирования
Эти датчики помогают роботу определять свое положение в пространстве:

- GPS-модули — для навигации на открытой местности
- Системы локального позиционирования — для ориентации в помещениях
Датчики вращения и наклона
Такие датчики измеряют угловое положение и движение робота:
- Гироскопы — определяют угловую скорость и ориентацию
- Акселерометры — измеряют ускорение и наклон
- Компасы — определяют направление относительно магнитного поля Земли
Ключевые характеристики датчиков в робототехнике
При выборе датчиков для робота важно учитывать их основные характеристики:
Точность измерений
Точность показывает, насколько близки показания датчика к истинному значению измеряемой величины. Обычно выражается как диапазон погрешности, например ±1 мм. Высокая точность критична для многих задач робототехники.
Разрешающая способность
Разрешение определяет минимальное изменение входного сигнала, которое датчик способен зафиксировать. Например, датчик температуры с разрешением 0.1°C сможет различить 25.1°C и 25.2°C, а с разрешением 1°C — нет.
Линейность характеристики
Линейность показывает, насколько выходной сигнал датчика пропорционален измеряемой величине во всем диапазоне. Линейная характеристика упрощает обработку данных.

Повторяемость показаний
Характеризует способность датчика выдавать одинаковые показания при многократном измерении в одних и тех же условиях. Высокая повторяемость обеспечивает надежность измерений.
Диапазон рабочих температур
Определяет условия, в которых датчик способен корректно функционировать. Важно учитывать при работе робота в экстремальных средах.
Роль датчиков в функционировании роботов
Датчики играют ключевую роль в работе современных роботов, обеспечивая:
- Восприятие окружающей среды
- Навигацию и ориентацию в пространстве
- Обнаружение препятствий и объектов
- Контроль состояния узлов и механизмов робота
- Обратную связь для систем управления
Без датчиков робот был бы «слепым» и не смог бы адекватно взаимодействовать с окружающим миром.
Выбор датчиков для конкретных задач робототехники
При проектировании робота важно правильно подобрать комплект датчиков под решаемые задачи. Рассмотрим несколько примеров:
Мобильный робот для навигации в помещении
Для такого робота потребуются:

- Ультразвуковые или инфракрасные дальномеры для обнаружения препятствий
- Энкодеры на колесах для одометрии
- Гироскоп и акселерометр для определения положения в пространстве
- Камера или лидар для построения карты помещения
Промышленный манипулятор
Ключевые датчики для робота-манипулятора:
- Датчики положения в суставах (энкодеры или потенциометры)
- Датчики усилия в захвате
- Тактильные сенсоры на рабочем органе
- Системы машинного зрения для контроля рабочей зоны
Летающий дрон
Для автономного полета дрону необходимы:
- GPS-приемник для навигации
- Барометр для определения высоты
- Гироскоп и акселерометр для стабилизации
- Ультразвуковой дальномер для измерения расстояния до земли
- Камера для визуальной ориентации
Современные тенденции в развитии датчиков для роботов
Технологии сенсоров для робототехники активно развиваются. Основные тренды включают:
- Миниатюризацию датчиков
- Повышение энергоэффективности
- Интеграцию нескольких типов датчиков в одном корпусе
- Развитие систем машинного зрения на базе нейросетей
- Создание биоподобных сенсоров, имитирующих органы чувств человека
Эти инновации позволяют создавать все более совершенных роботов, способных эффективно работать в сложных условиях.

Проблемы и ограничения современных робототехнических датчиков
Несмотря на значительный прогресс, датчики для роботов все еще имеют ряд ограничений:
- Чувствительность к помехам и шумам
- Ограниченный динамический диапазон
- Сложность работы в экстремальных условиях
- Высокая стоимость прецизионных датчиков
- Необходимость периодической калибровки
Преодоление этих ограничений — одна из ключевых задач для дальнейшего развития робототехники.
Заключение: будущее сенсорных технологий в робототехнике
Датчики являются неотъемлемой частью любого робота, обеспечивая его способность воспринимать окружающий мир и взаимодействовать с ним. Развитие сенсорных технологий идет по пути повышения точности, расширения функциональности и интеграции различных типов датчиков.
В будущем мы можем ожидать появления еще более совершенных датчиков, которые позволят роботам приблизиться по своим возможностям восприятия к человеку. Это откроет новые горизонты применения роботов в самых разных сферах — от промышленности и медицины до исследования космоса и глубин океана.

Датчики роботов. Как выбрать и какие бывают датчики, сенсоры.
Содержание
- Датчики роботов
- Что могут чувствовать люди, но не могут чувствовать роботы?
- Что могут чувствовать роботы, но не могут чувствовать люди?
- Какие датчики необходимы для вашего робота?
- Контактные датчики
- — Кнопка / контактный выключатель.
- — Датчики измерения давления
- Дистанционные датчики
- — Ультразвуковые датчики
- — Инфракрасные датчики
- — Лазер
- — Энкодеры
- — Линейный потенциометр
- — Датчики растяжения и изгиба
- — Стереокамера
- Датчики позиционирования
- — Локализация в помещении (навигация в комнате)
- — GPS
- Датчики вращения
- — Потенциометр
- — Гироскоп
- — Энкодеры
- Датчики роботов, реагирующие на условия окружающей среды
- — Датчик света
- — Датчик звука
- — Температурные датчики
- — Тепловизионная камера
- — Датчики измерения влажности
- — Барометрический датчик давления
- — Датчики газа
- — Магнитометры
- Датчики, использующие вращение
- — Компас
- — Гироскоп
- — Акселерометры
- — ИИБ
- И другие
- — Датчики тока и напряжения
- — Магнитные датчики
- — Датчики вибрации
- — Технологии RFID
- Практическая часть
- Движение по линии
Датчики роботов
В отличие от человека, роботы не ограничены только зрением, слухом, осязанием, обонянием и вкусом. Датчики роботов бывают разных типов. В первую очередь роботы используют различные электромеханические датчики, чтобы исследовать и понять окружающий мир и самих себя.
Датчики роботов бывают разных типов. В первую очередь роботы используют различные электромеханические датчики, чтобы исследовать и понять окружающий мир и самих себя.
Воспроизвести органы чувств живого существа в данный момент очень сложно. Из-за этого исследователи и разработчики прибегают к альтернативам биологических чувств.
что могут датчикиЧто могут чувствовать люди, но не могут чувствовать роботы?
При помощи камер роботы могут “видеть”, но испытывают трудности с понимание того, что они видят. Робот может получить с камеры изображение, состоящее из миллионов пикселей. Но без сложного программирования, он не будет знать, что любой из этих точек обозначает.
Датчики расстояния указывают расстояние до объекта, но нужно, чтобы робот не врезался в препятствие или объект. Исследователи и компании экспериментируют с различными подходами к датчикам роботов. Дополнительно разрабатываются датчики, которые позволяет роботу не только “видеть” но “понимать” что он видит.
Исследователи и компании экспериментируют с различными подходами к датчикам роботов. Дополнительно разрабатываются датчики, которые позволяет роботу не только “видеть” но “понимать” что он видит.
Это может занять длительное время, прежде чем робот сможет различить объекты, расположенные перед ним на столе. Особенно если они расположены не так как в базе данных объектов.
Роботы очень плохо различают то, что связано со вкусом или обонянием.
Человек может сказать вам, “это является на вкус сладким” или “это плохо пахнет”, в то время как роботу необходимо провести анализ химического состава. Затем нужно искать вещества в базе данных, чтобы определить, что у человека отмечено на вкус как “сладкое” или на запах как “плохой”.
Такие датчики роботов как датчики вкуса и обоняния разрабатывались мало. В первую очередь потому что не было большого спроса на робота, который может различать вкус или запах.
Люди имеют множество нервных окончаний на всей своей коже, и мы знаем, когда мы дотронулись до какого-либо предмета или что-то коснулось нас. Роботы оборудованы кнопками или простыми контактами, размещенными в стратегически важных местах. Например, на переднем бампере, чтобы определить, вступает ли он в контакт с объектом.
Роботы оборудованы кнопками или простыми контактами, размещенными в стратегически важных местах. Например, на переднем бампере, чтобы определить, вступает ли он в контакт с объектом.
Роботы типа «домашние животные» могут иметь контакты или группу датчиков, расположенных на голове, ногах или спине, но если вы попытаетесь прикоснуться к зоне, где нет датчика, робот не поймет, что его касались, и не будет реагировать. Поскольку исследования в области гуманоидных роботов продолжаются, возможно, такие датчики роботов как “электромеханическая кожа” будет развиваться.
Что могут чувствовать роботы, но не могут чувствовать люди?
Робот не может сказать вам приятное на вкус или запах вещество. Хотя этапы анализа химического состава могут дать ему гораздо больше информации, чем нормальный человек может знать о его свойствах. Если робот оснащен датчиком окиси углерода, то он будет в состоянии обнаружить угарный газ.
Это повысит безопасность так как угарный газ не имеет цвета и запаха для человека. Робот также будет в состоянии сказать вам уровень рН вещества. Следовательно может определить, она кислая или щелочная, и многое, многое другое.
Робот также будет в состоянии сказать вам уровень рН вещества. Следовательно может определить, она кислая или щелочная, и многое, многое другое.
Люди используют пару глаз, чтобы получить визуальную информацию, хотя многие люди не могут определить точно расстояние до объекта. Человек может сказать вам, что до дерева около 20 метров. В то же самое время робот, оснащенный датчиками расстояния, может сказать вам, что до дерева 21.1 метра.
Кроме того, роботы могут дать точные значения различных факторов окружающей среды, про которые люди не знают или не способны воспринимать.
Например, робот может сказать вам какое у него точное угловое или линейное ускорение. Хотя большинство людей большинство людей скорее всего определит что он передвигается или поворачивает.
Человек может сказать вам на основе своего опыта, что предмет горячий или холодный, не прикасаясь к нему. В то время как тепловизор может предоставить 2D тепловое изображение, находящееся перед ним.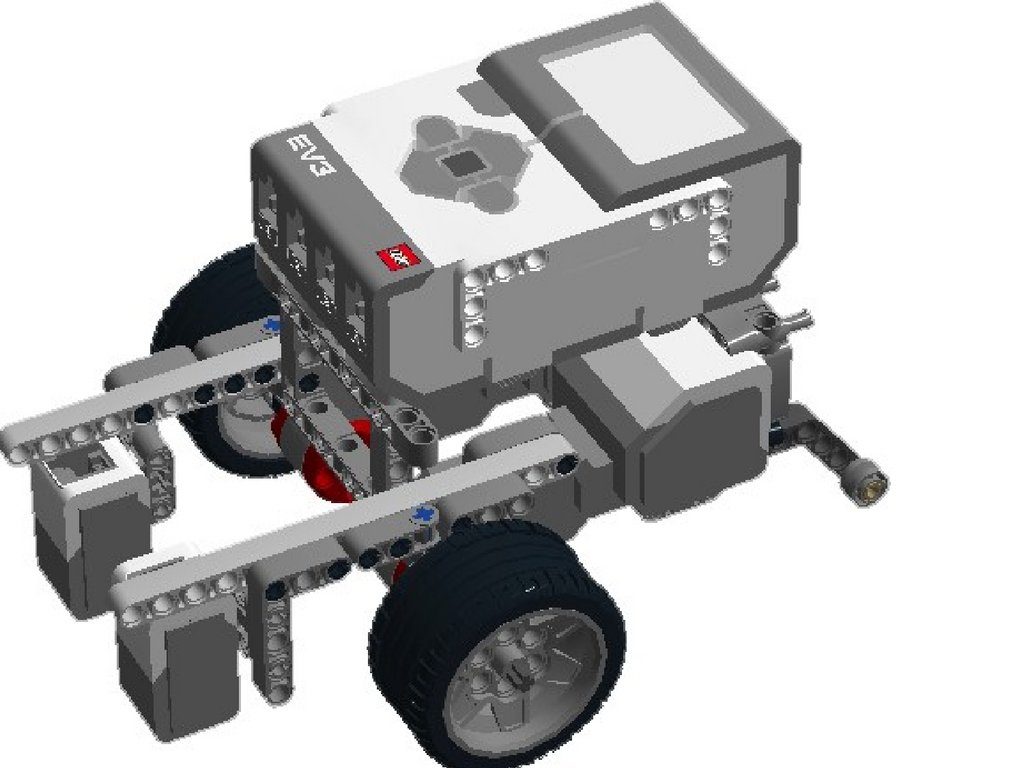 Хотя у человека есть пять основных чувств, датчики роботов могут иметь практически бесконечное количество разновидностей.
Хотя у человека есть пять основных чувств, датчики роботов могут иметь практически бесконечное количество разновидностей.
Какие датчики необходимы для вашего робота?
Итак, какие типы датчиков доступны, а какие датчики нужны вашему роботу? Вы должны сначала спросить себя, для каких целей нужен робот и что он должен измерять. Затем ниже можно посмотреть какие бывают типы датчиков для роботов.
Есть большая вероятность того, что вам не подойдет ни одна их перечисленных ниже категорий, поэтому постарайтесь определить основные элементы робота и разбить задачу на составляющие.
Датчики для роботов бывают:
- контактные
- дистанционные
- позиционирования
- реагирующие на условия окружающей среды
- использующие вращение
- и другие
Контактные датчики
— Кнопка / контактный выключатель.
Переключатели, кнопки и контактные датчики используются для обнаружения физического контакта между объектами, а не ограничиваются только людьми, нажимающими на кнопки.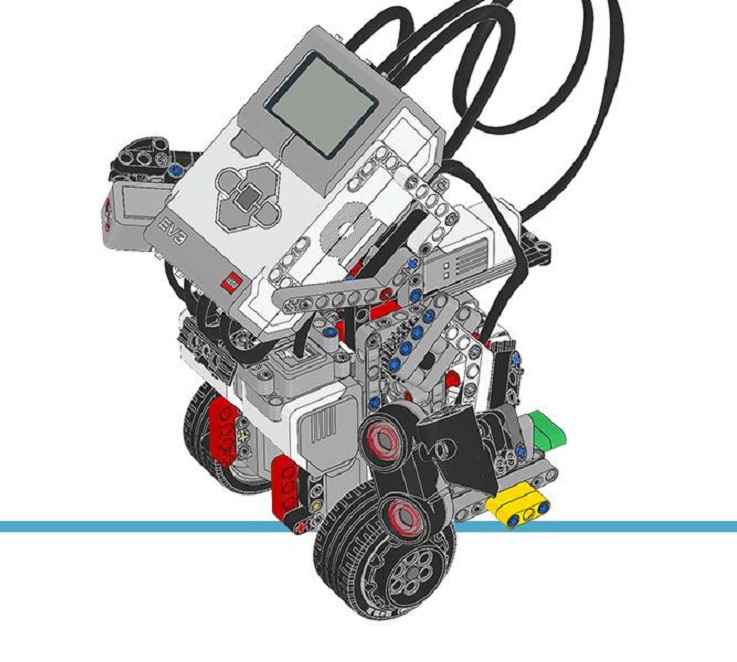
Бампер робота может быть оснащен датчиком касания или кнопкой. Дополнительно “усы” (как и у животного) могут использоваться для обнаружения объекта на различных расстояниях.
- Преимущества: очень низкая цена, простота интеграции, надежность.
- Недостатки: расстояние измерения ограничено.
— Датчики измерения давления
Кнопка, которая предлагает одно из двух возможных показаний (ON или OFF). В результате датчик робота производит выходной сигнал, пропорциональный прилагаемой к нему силе.
- Преимущества: позволяет измерять, сколько силы применяется.
- Недостатки: могут быть неточными и сложнее в использовании, чем простые коммутаторы.
Дистанционные датчики
— Ультразвуковые датчики
Датчики, которые используют ультразвуковые сигналы для измерения времени между отправкой сигнала и возвратом его эхо-сигнала называются ультразвуковыми. Датчики роботов в этом случае созданы на основе изучения летучих мышей, дельфинов и других животных.
Датчики роботов в этом случае созданы на основе изучения летучих мышей, дельфинов и других животных.
Ультразвуковые дальномеры могут измерять диапазон расстояний, но используются, в частности, в воздухе и зависят от отражающей способности различных материалов.
- Преимущества: измерение среднего диапазона (несколько метров).
- Недостатки: поверхности и факторы окружающей среды могут повлиять на показания.
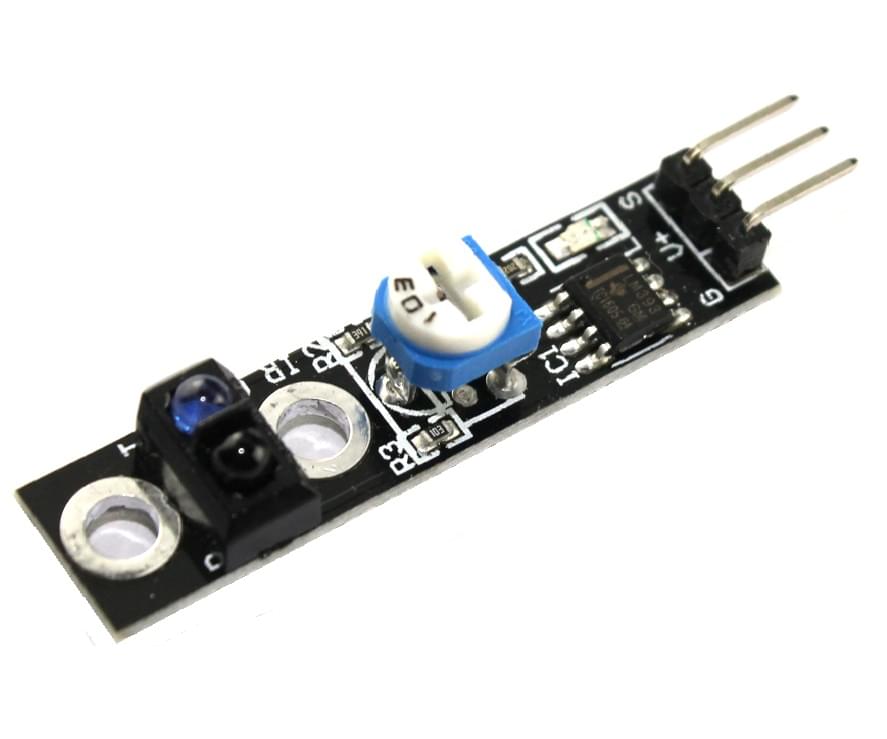
— Инфракрасные датчики
Инфракрасный диапазон также может использоваться для измерения расстояния. Некоторые инфракрасные датчики измеряют одно конкретное расстояние, в то время как другие обеспечивают выходной сигнал, пропорциональный расстоянию до объекта.
инфракрасный датчик Lego Education EV3- Преимущества: низкая стоимость, достаточно надежные и точные.
- Недостатки: более широкий диапазон, чем у ультразвуковых датчиков.
— Лазер
Лазеры используются, когда требуется высокая точность, или большое расстояние до объекта, или когда присутствуют оба фактора. Сканирующие лазерные дальномеры используют спин-лазеры (ультрабыстрые лазеры) для двумерного сканирования расстояния до объектов.
Сканирующие лазерные дальномеры используют спин-лазеры (ультрабыстрые лазеры) для двумерного сканирования расстояния до объектов.
- Преимущества: очень точные с очень большим диапазоном.
- Недостатки: намного дороже, чем обычные инфракрасные или ультразвуковые датчики.
— Энкодеры
Оптические энкодеры часто используют пару светодиод фотодиод. На валу установлен диск с отверстиями, через которые сигнал со светодиода попадает на фотодиод и считывается количество импульсов.
оптический энкодерОпределенное количество отверстий соответствует полному углу, пройденному колесом. Зная радиус колеса, вы можете определить общее расстояние, пройденное этим колесом. Два энкодера дают вам относительное расстояние в двух измерениях.
- Преимущества: если нет скольжения, то высокая точность измерения. Часто устанавливается на задний вал двигателя.
- Недостатки: требуется дополнительное программирование, более точные оптические энкодеры могут дорого стоить.
— Линейный потенциометр
Линейный потенциометр способен измерять абсолютное положение объекта.
линейный потенциометр- Преимущества: точно измеряет абсолютное положение.
- Недостатки: маленький диапазон.
— Датчики растяжения и изгиба
Датчик растяжения состоит из материала, сопротивление которого изменяется в зависимости от того, насколько он растянут. Датчик изгиба обычно представляет собой сэндвич из материалов, где сопротивление одного из слоев изменяется в зависимости от того, насколько он был согнут.
датчик растяженияИх можно использовать для определения небольшого угла или поворота, например, сколько пальцев было согнуто.
- Преимущества: полезно, когда ось вращения является внутренней или недоступной.
- Недостатки: небольшая точность и возможность измерения только малых углов.
— Стереокамера
Как и человеческие глаза, две камеры, расположенные на расстоянии друг от друга, могут предоставлять информацию о глубине (стереовидение). Роботы, оснащенные камерами, могут быть одними из самых способных и сложных роботов.
Роботы, оснащенные камерами, могут быть одними из самых способных и сложных роботов.
Камера, в сочетании с правильным программным обеспечением, может обеспечить хорошее распознавание цвета и объектов.
Преимущества: возможность предоставления подробной информации и хорошая обратная связь.
Недостатки: сложность в программирование и в использовании информации.
Датчики позиционирования
— Локализация в помещении (навигация в комнате)
Внутренняя система локализации может использовать несколько маяков для триангуляции (определение взаимного расположения точек на поверхности) положения робота в помещении, в то время как другие используют камеру и ориентиры.
внутренняя система локализации- Преимущества: отлично подходит для абсолютного позиционирования
- Недостатки: требуется сложное программирование и использование маркеров.
— GPS
GPS использует сигналы от нескольких спутников, вращающихся вокруг планеты, чтобы определить их географические координаты.
Устройства GPS могут обеспечить географическое позиционирование с точностью до 5 метров, в то время как более сложные системы, включающие обработку данных и исправление ошибок, благодаря использованию других единиц GPS или ИДУ, могут иметь точность до нескольких сантиметров.
- Преимущества: не требует маркеров или других ссылок.
- Недостатки: могут работать только на открытом пространстве.
Датчики вращения
— Потенциометр
Поворотный потенциометр – это, по сути, делитель напряжения и обеспечивает аналоговое напряжение, соответствующее углу поворота ручки.
поворотный потенциометр- Преимущества: простой в использовании, недорогой, достаточно точный, обеспечивает абсолютные показания.
- Недостатки: большинство из них ограничены 300 градусами вращения.
— Гироскоп
Электронный гироскоп измеряет скорость углового ускорения и подает соответствующий сигнал (аналоговый сигнал напряжения, последовательный канал связи, с I2C и т.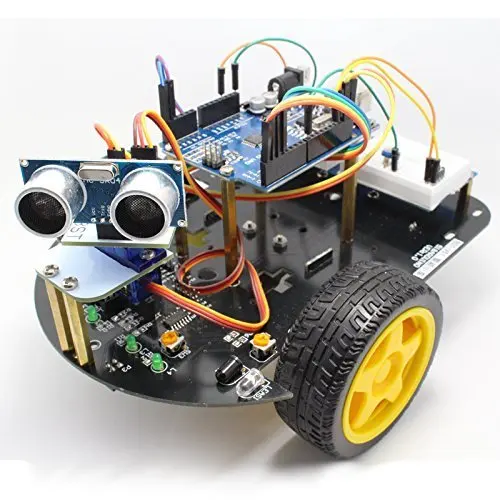 д.). В электронном гироскопе используются пьезопластины.
д.). В электронном гироскопе используются пьезопластины.
- Преимущества: отсутствие «механических» компонентов.
- Недостатки: датчик всегда подвергается угловому ускорению, тогда как микроконтроллер не всегда может принимать непрерывный входной сигнал, то есть значения теряются, что приводит к ”дрейфу» значений
— Энкодеры
Оптические энкодеры используют мини — инфракрасные пары передатчика / приемника. Количество разрывов инфракрасного пучка соответствует полному углу, пройденному колесом.
энкодерМеханический энкодер использует очень тонко обработанный диск с достаточным количеством отверстий, чтобы читать определенные углы. Поэтому механические датчики могут использоваться как для абсолютного, так и для относительного вращения.
- Преимущества: точность.
- Недостатки: у оптических энкодеров угол поворота является относительным (не абсолютным) от исходного положения.
Датчики роботов, реагирующие на условия окружающей среды
— Датчик света
Датчик света может использоваться для измерения интенсивности источника света, будь то естественным или искусственным. Обычно его сопротивление пропорционально интенсивности света.
- Преимущества: обычно очень недорогие и очень полезные.
- Недостатки: не могут различать источник или тип света.
— Датчик звука
Датчик звука — это, по сути, микрофон, который возвращает напряжение, пропорциональное уровню окружающего шума. Более сложные платы могут использовать данные из микрофона для распознавания речи.
датчик звука- Преимущества: дешевый и надежный датчик.
- Недостатки: для того, чтобы расшифровать важную информацию требуется сложное программное обеспечение.
— Температурные датчики
Температурные датчики могут использоваться для измерения температуры окружающей среды или в сложных условиях, например в нагревательных элементах, печах и т.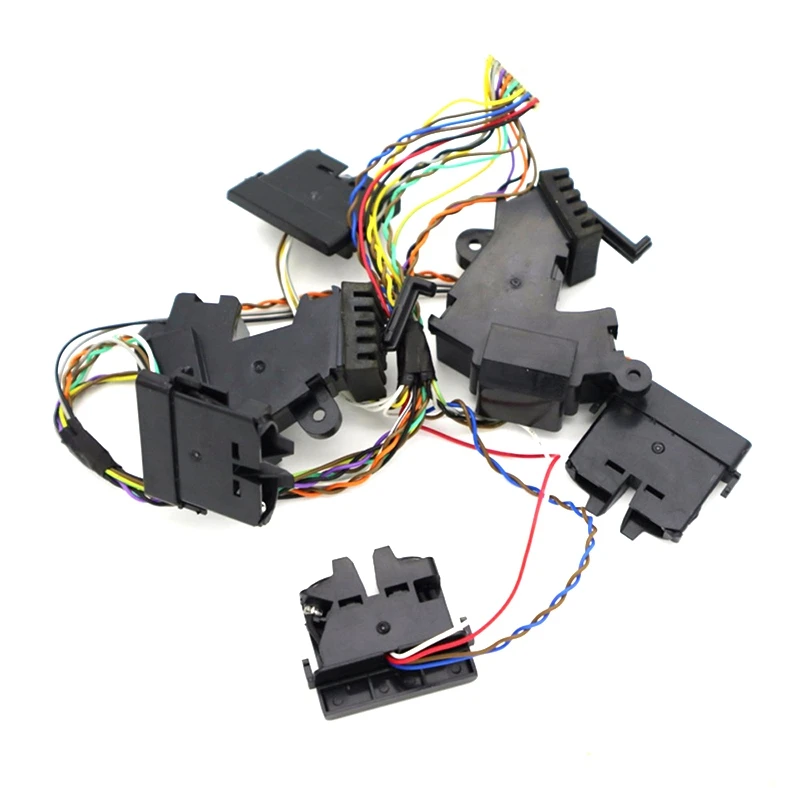 д.
д.
- Преимущества: могут быть высокоточными.
- Недостатки: более сложные и точные датчики могут быть более сложными в использовании.
— Тепловизионная камера
Тепловизионный датчик (камера) инфракрасного или теплового изображения позволяет получить полное 2D-тепловое изображение всего, что находится перед камерой тепловизора. Таким образом, можно определить температуру объекта.
тепловизионная камера- Преимущества: можно выборочно на расстоянии измерять тепловую активность объектов.
- Недостатки: высокая стоимость
— Датчики измерения влажности
датчик влажностиДатчики влажности определяют процентное содержание воды в воздухе и часто соединяются с датчиками температуры.
— Барометрический датчик давления
датчик давленияДатчик давления (который также может быть барометрическим датчиком) может использоваться для измерения атмосферного давления.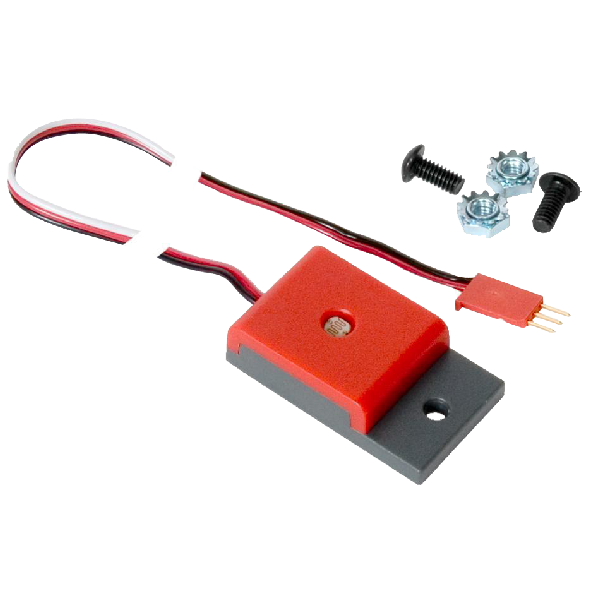 Следовательно может дать представление о высоте БПЛА (беспилотный летательный аппарат).
Следовательно может дать представление о высоте БПЛА (беспилотный летательный аппарат).
— Датчики газа
Датчики газа используются для определения наличия и концентрации различных газов. Однако они нужны только специализированных робототехнических комплексов.
датчик угарного газа- Преимущества: это единственные датчики роботов, которые могут быть использованы для точного обнаружения газа
- Недостатки: недорогие датчики могут давать ложные срабатывания или несколько неточны и поэтому не должны использоваться для критически важных задач.
— Магнитометры
Магнитометры могут быть использованы для обнаружения магнитов и магнитных полей. Также может определить полярность.
магнитометр- Преимущества: помогает обнаружить ферромагнитные металлы.
- Недостатки: в некоторых случаях датчики могут быть повреждены сильными магнитами.
Датчики, использующие вращение
— Компас
Цифровой компас способен использовать магнитное поле Земли для определения его ориентации относительно магнитных полюсов. Наклон компаса компенсируется и учитывает тот факт, что робот не может передвигаться строго горизонтально.
Наклон компаса компенсируется и учитывает тот факт, что робот не может передвигаться строго горизонтально.
- Преимущества: обеспечивает абсолютную навигации.
- Недостатки: более высокая точность увеличивает цену.
— Гироскоп
Электронные гироскопы способны определять угол наклона по одной или нескольким осям. Механические датчики наклона, как правило, определяют наклон робота при помощи ртути в стеклянных капсулах или шарах.
электронный гироскоп- Преимущества: электронные гироскопы имеют более высокую точность, чем механические.
- Недостатки: более высокая стоимость.
— Акселерометры
Акселерометры измеряют линейное ускорение. Это позволяет измерять гравитационное ускорение или любое другое ускорение, которое испытывает робот.
Это может быть хорошим вариантом для приблизительной оценки расстояния, если ваш робот не может использовать окружающую среду для уточнения координат.
Акселерометры могут измерять ускорение вдоль одной, двух или трех осей. Трехосевой акселерометр позволяет измерять все углы наклона сенсора в пространстве.
- Преимущества: они не требуют никаких внешних ссылок или маркеров для функционирования, и может обеспечить абсолютную ориентацию по отношению к гравитационному полю Земли или определить относительную ориентацию.
- Недостатки: они только приблизительно оценивают пройденное расстояние и не могут точно определить его.
— ИИБ
Инерциальный измерительный блок сочетает в себе мультиосевой акселерометр с мультиосевым гироскопом и иногда мультиосевым магнитометром для того, чтобы более точно измерить крен.Такие датчики роботов достаточно сложные.
- Преимущества: это очень надежный способ измерения без использования внешних ссылок (кроме магнитного поля Земли)
- Недостатки: может быть очень дорогим и сложным в использовании.

И другие
— Датчики тока и напряжения
Датчики тока и напряжения измеряют ток и/или напряжение конкретной электрической цепи. Это может быть очень полезно для определения того, сколько ваш робот сможет работать (измерять напряжение аккумуляторной батареи) или, если ваши моторы слишком сильно работает (измерения тока).
датчик тока и напряжения- Преимущества: они делают именно то, что они предназначены.
- Недостатки: могут вносить изменения в измеряемое напряжение или ток. Иногда требуется изменить измеряемую электрическую цепь.
— Магнитные датчики
Магнитные датчики и магнитометры способны обнаружить магнитные предметы и могут требовать контакта с объектом, или должны быть расположены относительно близко к объекту.
магнитные датчикиТакие датчики роботов могут использоваться на автономной газонокосилке для обнаружения провода, проложенного по газону или для поиска скрытой проводки в квартире.
- Преимущества: как правило, недорогие
- Недостатки: как правило, должны располагаться относительно близко к объекту, и к сожалению, не могут обнаруживать немагнитные металлы.
Датчики вибрации предназначены для обнаружения вибрации объекта с помощью пьезоэлектрических или других технологий.
— Технологии RFID
Технология RFID – это технология беспроводного обмена данными посредством радиосигнала между электронной меткой, которая помещается на объект и специальным радиоэлектронным устройством, которое считывает сигнал метки.
Устройства радиочастотной идентификации могут использовать как активные (с питанием), так и пассивные (без питания) RFID-метки обычно имеющие размер и форму кредитной карты, небольшой плоский диск или дополнение к брелоку (другие формы также возможны).
технология RFIDКогда метка RFID находится на определенном расстоянии от считывателя RFID, создается сигнал с идентификатором тега.
- Преимущества: RFID метки обычно имеют очень низкую стоимость и могут определяться индивидуально.
- Недостатки: бесполезно для измерения расстояния, кроме случаев, когда метка находится в пределах диапазона.
Практическая часть
Типичным примером, демонстрирующим автономную работу робота, является робот на базе набора Lego EV3 для движения по линии при помощи одного или двух датчиков цвета. В этом случае датчики робота определяют яркость отраженного света.
Движение по линии
7 важных фактов, которые вы должны знать
Что такое датчики роботов? | Сенсорная робототехникаРазличные типы датчиков роботов; Кредиты изображений: Фонд робототехники с открытым исходным кодом, Роботизированные датчики, CC BY 3.0Роботик Датчики — это датчики, которые робот использует для связи с окружающей средой, вычисляя физические величины вокруг себя.
Датчики работают на основе теории трансдукции, которая включает преобразование энергии из одной формы в другую, а полученные данные обрабатываются контроллером, что позволяет роботу действовать. Датчики роботов также отслеживают состояние робота и окружающую его ситуацию.
Как упоминалось ранее, датчики роботов используются для оценки состояния робота и его окружения. Чтобы обеспечить приемлемое поведение, эти сигналы передаются контроллеру. Роботизированные сенсоры смоделированы по ролям органов чувств человека. Для правильной работы роботам необходимо много знать о своем окружении.
Почему сенсоры важны для роботов?Датчики роботов могут быть механическими, химическими или электрическими по своей природе, и работа каждого датчика основана на принципе преобразования, который передает энергию от одного типа к другому. Датчики робота позволяют роботу гибко реагировать на окружающую обстановку. Роботы могут видеть и чувствовать с помощью датчиков, которые позволяют им выполнять более сложные задачи.
Датчики робота позволяют роботу гибко реагировать на окружающую обстановку. Роботы могут видеть и чувствовать с помощью датчиков, которые позволяют им выполнять более сложные задачи.
Датчики роботов отслеживают состояние роботов и их окружение, отправляя электронные сигналы на контроллеры роботов. Датчики нужны роботам, чтобы контролировать себя. Роботам необходимы знания о местонахождении и движении их тел и частей, чтобы контролировать их поведение.
Характеристики датчиков в робототехникеХарактеристики датчиков робота помогают нам определить подходящий датчик для робота в различных ситуациях. Некоторые из основных атрибутов датчиков роботов описаны ниже:
точностьТочность датчика относится к близости зарегистрированного значения датчика к фактическому значению. Это часто формулируется как диапазон значений. Например, +/- 1 мм. Посмотрев на раздел калибровки ниже, мы часто можем повысить точность датчиков робота. Следовательно, точность — это разница между выходным сигналом датчика и фактическим значением, т.![]() Е. Погрешность = измеренное значение — истинное значение.
Е. Погрешность = измеренное значение — истинное значение.
Точность и разрешение датчиков робота также можно повысить путем их калибровки. Отдельный раздел посвящен разрешению. Калибровка — это метод сравнения характеристик датчика с некоторыми известными величинами, который может быть выполнен продавцом или вами, и эта информация может быть в дальнейшем использована для создания уравнения, связывающего эти два параметра.
Это уравнение даст лучшие результаты, чем значения по умолчанию при обработке данных датчика. Вы также должны понимать, когда датчик становится перегруженным (когда вы поднимаетесь выше или ниже предела того, что он может измерить), и данные становятся менее надежными или бессмысленными.
разрешениеКрайне важно знать, насколько малую часть могут обнаружить датчики робота, пока мы не узнаем, насколько она точна. Датчик температуры с разрешением, например, 5 градусов, например, не может различить 30 и 32 градуса. В результате под разрешением понимается наименьшее изменение входного сигнала, которое датчик может обнаружить и надежно указать. Например, какое разрешение у обычной линейки или у штангенциркуля?
В результате под разрешением понимается наименьшее изменение входного сигнала, которое датчик может обнаружить и надежно указать. Например, какое разрешение у обычной линейки или у штангенциркуля?
Независимо от того, является ли работа датчиков робота линейной или нет, эта информация становится полезной при подаче выходных данных датчика на низкоуровневый компьютер, который не может выполнять много вычислений и составлять уравнение калибровки. Калибровочная кривая определяет линейность. В статических условиях фиксированная эталонная кривая отображает амплитуду o / p в зависимости от амплитуды i / p и имеет сходство с прямой линией или линейностью.
ПовторяемостьВажной особенностью датчиков робота является то, что они должны давать одинаковый результат каждый раз, когда вы измеряете одни и те же условия. Это обеспечивает повторяемость датчиков.
Мертвая зона и гистерезисВ механических системах, таких как роботы, некоторая погрешность в шестернях всегда вызывает различное значение в зависимости от направления движения (гистерезис) или зоны нечувствительности, когда датчики робота не обнаруживают какое-либо движение.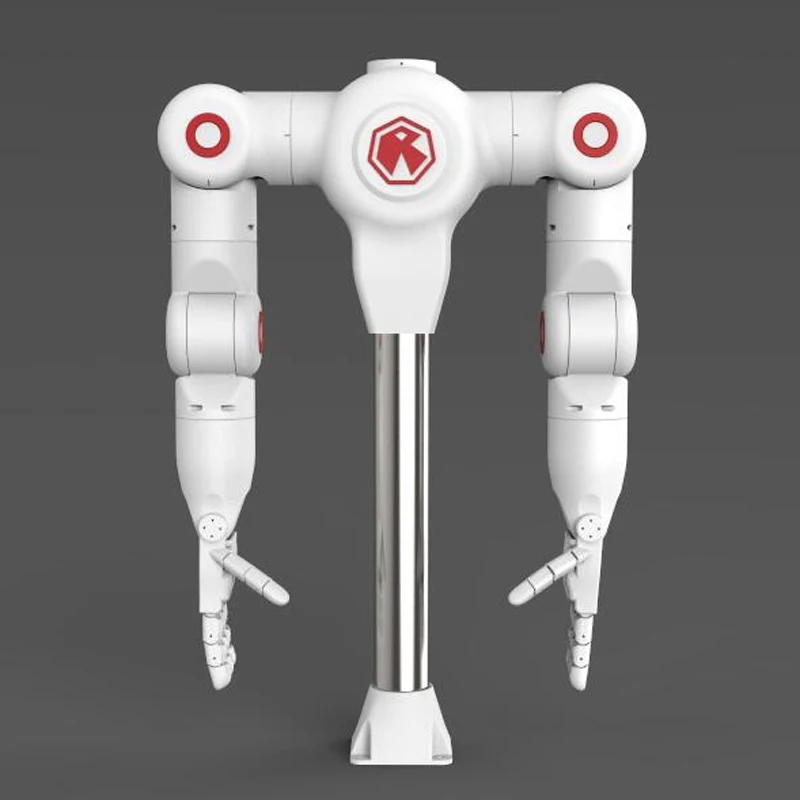
Расчет конкретных датчиков робота имеет собственный дрейф. Это особенно верно для скоростных гироскопов. Вам понадобится модель с низким дрейфом (чем меньше дрейф, тем больше она стоит), а также с возможностью фильтрации выходного сигнала датчиков. Например, робот неподвижен; Понятно, что датчик не вращается, поэтому вы можете игнорировать гироскоп и делать необычные вещи, например игнорировать датчик и / или определять скорости дрейфа и применять их для повышения производительности датчика.
ТемператураТемпература состоит из двух компонентов, которые определяют характеристики датчиков робота. Первое — это возможность поддерживать температурный режим. Распространенная проблема со многими датчиками заключается в том, дрейфует / изменяется значение датчика при изменении температуры или нет. Также есть два раздела второй спецификации температуры:
- Полезная температура — Каков минимальный и максимальный диапазон температур датчика?
- Температура хранения — какова самая низкая / самая высокая температура, при которой датчики могут быть, пока они не будут повреждены?
0Поле зрения (FOV)FOV (поле зрения) — это важная характеристика, которая указывает, какую область (обычно угловую) могут видеть датчики робота. Часто упоминаются горизонтальный (hFOV) и вертикальный (vFOV) компоненты. Например, 70 × 30 градусов представляют hFOV x vFOV соответственно.
Размер пятнаВ основном это касается лазеров, но важно знать, насколько велик размер пятна на заданном расстоянии (пятно становится больше с увеличением пространства). Этот размер пятна имеет решающее значение для определения размера видимых предметов. Для просмотра сквозь пыль, дождь и снег необходим небольшой размер пятна. Чтобы выразить это, можно использовать как горизонтальную, так и вертикальную шкалу пятен. Изготовители датчиков роботов обычно публикуют только одно из двух значений, потому что другое больше.
Форма выходаНеобходимо понимать выходную форму датчика. Например, для аналогового выхода вам может потребоваться знать, каков диапазон напряжения или сопротивления. Если производство находится на более высокой стадии, убедитесь, что у вас есть соответствующие исходные данные. 4-20 мА, напряжение, USB, Ethernet, последовательный порт и CAN — все распространенные типы выходов. Имейте в виду, что в камерах с гигабитным Ethernet часто используется пакет jumbo (большой MTU), несовместимый со стандартами беспроводной связи 802.11 и требующий проводного соединения.
Чтобы правильно запитать систему, необходимо знать, сколько энергии потребляют датчики робота и какой диапазон напряжения они могут принимать. Некоторые датчики роботов будут иметь широкий диапазон, в то время как другим потребуется только один DC-DC для строго контролируемого входного напряжения.
НадежностьНадежность — это сложный параметр для оценки датчиков робота. На надежность влияют несколько факторов. Насколько хорошо программа разработана и надежна? Является ли датчик прочным с точки зрения физической прочности? Он хорошо построен? Есть ли электробезопасность (защитные диоды, предохранители и т. Д.)? Разъемы в хорошем состоянии? Разъемы выпадут? Он водостойкий? Есть ли пыленепроницаемый уплотнитель? Список таких вопросов никогда не может быть недостаточным.
Первичная классификация датчиков робота производится на основе местоположения стимула.
Проприоцептивные датчики | Внутренние датчики в робототехникеПроприоцептивные (ПК) сенсоры дают роботу чувство собственного достоинства. Они вычисляют внутренние параметры роботизированной системы, такие как угол сочленения, положение колес, уровень заряда батареи и т. Д.
Экстероцептивные датчики | Внешние датчики в робототехникеДатчики, которые предоставляют информацию о внешнем состоянии, например наблюдения за окружающей средой и ее объектами, известны как экстероцептивные (ЭК).
Активные и пассивные датчики в робототехникеДругой набор классификации основан на способе рассеивания энергии —
Активные датчики в робототехникеАктивные датчики, такие как датчики на основе радара, работают путем излучения излучения (A).
Пассивные датчики — это датчики, которые пассивно получают энергию, например, камера (P).
Различные типы датчиков, используемых в роботах | Датчики и преобразователи роботовНекоторые из стандартных датчиков роботов можно разделить на проприоцептивные и экстероцептивные, а также активные и пассивные, соответственно, как показано в следующей таблице:
| Тип датчика | Сенсорная система | ПК / ЕС | A / P |
| Тактильный датчик (обнаружение физического контакта) | Контактные переключатели | EC | P |
| Оптические барьеры | A | ||
| Бесконтактные датчики приближения | A | ||
| Датчик колеса и движения (определение скорости и положения) | Кисть кодировщик | PC | P |
| Оптический кодер | A | ||
| Синхрос, Револьвер | A | ||
| Потенциометр | P | ||
| Индуктивный энкодер | A | ||
| Емкостной энкодер | A | ||
| Магнитный кодировщик | A | ||
| Датчик направления (ориентация робота относительно системы координат) | Гироскоп | PC | P |
| Компас | EC | P | |
| инклинометр | EC | P / A | |
| Наземный маяк (локализация в фиксированной системе отсчета) | GPS | EC | A |
| Светоотражающий маяк | |||
| Активный ультразвуковой маяк | |||
| Активный оптический / радиомаяк | |||
| Активная дальность | Ультразвуковые датчики | EC | A |
| Датчики отражения | |||
| Лазерный дальномер | |||
| Датчик движения / скорости | Доплеровский радар | EC | A |
| Доплеровский звук | |||
| Датчик на основе зрения | Пакет отслеживания объектов | EC | P |
| Пакет визуального ранжирования |
У роботов, в отличие от людей и животных, отсутствуют естественные чувства. Инженерам предстоит разработать их как сенсоры для роботов. Роботы используют датчики для построения представления о мире, в котором они находятся. ЛИДАР — это пример датчика, используемого в некоторых роботах (обнаружение света и определение дальности).
Инженерам предстоит разработать их как сенсоры для роботов. Роботы используют датчики для построения представления о мире, в котором они находятся. ЛИДАР — это пример датчика, используемого в некоторых роботах (обнаружение света и определение дальности).
LiDAR — это устройство для измерения расстояния, в котором используется лазер. Лазеры освещают объекты в атмосфере, а затем отражают их. Робот использует эти отражения для построения карты своего окружения. LiDAR сообщает роботам, что происходит в их среде и где она находится.
Датчик робота LiDAR; Кредиты на изображения: “Оптический датчик дальности Garmin LIDAR-Lite”(CC BY-NC-SA 2.0) от AdafruitКакие датчики используются в роботах?Типы датчиков зрения, используемых в робототехнике | Визуальные датчики РобототехникаДатчики зрения используют изображения для оценки присутствия, ориентации и точности ближайших объектов. Получение и обработка изображений совмещены в видеодатчиках, и многоточечный контроль может выполняться только с одним датчиком. Обмен данными между видеокамерой и компьютерным процессором также осуществляется через датчики технического зрения. Монохромный и цветной видеодатчики — это две формы видеодатчиков.
Обмен данными между видеокамерой и компьютерным процессором также осуществляется через датчики технического зрения. Монохромный и цветной видеодатчики — это две формы видеодатчиков.
Камеры необходимы роботам для перемещения по окружающей среде и предотвращения столкновений с близлежащими объектами, поскольку они являются датчиками, которые собирают и анализируют данные. 2D-изображения, 3D-зондирование, ультразвуковые и инфракрасные изображения — все это примеры технологий камеры.
Изображение Кредиты: Гислинг, Робот Люфтваффен Эйгентум, CC BY-SA 4.02D ImagingЦифровые фотоаппараты внешне напоминают пленочные, но в их основе лежат совсем другие научные концепции. Цифровая камера, в отличие от телевизора, которая создает изображения по пикселям, улавливает фотоны и преобразует их в электрический сигнал, который можно обрабатывать как число. ПЗС и КМОП — это два типа двумерных цифровых фотоаппаратов.
3D зондирование3D-зондирование — эффективный инструмент для навигации роботов, поскольку он предоставляет данные об объеме, форме, местоположении, ориентации и расстоянии объекта. Различные процессы, такие как стереозрение, организованный свет и лазерная триангуляция, могут создавать трехмерные данные.
Различные процессы, такие как стереозрение, организованный свет и лазерная триангуляция, могут создавать трехмерные данные.
Ультразвуковые камеры, также известные как сонарные камеры, рассчитывают промежуток времени между передачей и обнаружением звуковые волны для определения расстояния между камерой и объектом. Другие ультразвуковые датчики или роботы с ультразвуковыми датчиками также могут быть обнаружены с помощью ультразвуковых камер.
Ультразвуковой датчик робота; Кредиты изображений: Изображение предоставлено медведь из PixabayРобот с инфракрасным датчикомИнфракрасные датчики роботов обнаруживают инфракрасные (ИК) лучи, испускаемые объектом. Они также могут использовать ИК-свет для проецирования на целевой объект и получения отраженного света для определения его расстояния или близости. Инфракрасные датчики экономичны и могут отслеживать инфракрасный свет на большой площади. Они также работают в режиме реального времени. Они лучше, чем ультразвуковые датчики, описывают края объекта и различают одно от другого.
Они лучше, чем ультразвуковые датчики, описывают края объекта и различают одно от другого.
В визуальной или оптической навигации алгоритм компьютерного зрения и оптические датчики роботов, такие как лазерные дальномеры и фотометрические камеры с матрицами ПЗС, используются для извлечения визуальных характеристик, необходимых для локализации в окружающем мире, хотя есть другие разновидности систем навигации на основе зрения и методов локализации. Ниже перечислены важные компоненты каждого метода:
- Представления о мире природы
- Модели для зондирования
- Алгоритмы локализации
Самый простой способ заставить робота отправиться в определенное место — просто направить его. Это можно сделать различными способами, в том числе закопать индуктивную петлю или магниты в полу, нарисовать линии на полу или вставить маяки, маркеры или штрих-коды в окружающую среду. В промышленных сценариях такие автоматизированные транспортные средства (AGV) используются для транспортных задач. Роботы могут перемещаться в помещении с помощью систем внутреннего позиционирования на основе IMU.
В промышленных сценариях такие автоматизированные транспортные средства (AGV) используются для транспортных задач. Роботы могут перемещаться в помещении с помощью систем внутреннего позиционирования на основе IMU.
Также были разработаны гидроакустические навигационные системы. Роботы также могут использовать радионавигацию для определения своего местоположения. Бортовой полетный контроллер использует GPS для навигации и стабилизации, а спутниковые системы функционального дополнения (SBAS) и датчики высоты, такие как датчики атмосферного давления, часто используются для измерений, а инерционные датчики используются в некоторых бортовых навигационных системах роботов. Системы подводного акустического позиционирования могут управлять автономными подводными аппаратами.
Датчики силы в робототехникеДатчик силы руки роботаДатчики силы используются для определения сил между основанием датчика и чувствительным слоем. Датчики FT, или датчики силы-момента, воспринимают как силы, так и крутящие моменты. Обычно они устанавливаются непосредственно перед рабочий орган на рука робота. Датчики могут использоваться в широком диапазоне приложений, и есть недорогие аналоговые датчики давления вплоть до самых популярных 6-осевых датчиков FT.
Обычно они устанавливаются непосредственно перед рабочий орган на рука робота. Датчики могут использоваться в широком диапазоне приложений, и есть недорогие аналоговые датчики давления вплоть до самых популярных 6-осевых датчиков FT.
Поскольку они не являются тактильными датчиками, их нельзя использовать для определения силы скольжения. Однако их можно использовать для определения мощности. Учитывая разнообразие доступных датчиков силы, как указано ниже, может быть сложно решить, какой из них вам нужен.
- Простой датчик давления.
- Пьезоэлектрический датчик.
- Датчик на основе тензодатчика.
- Емкостные FT-датчики.
- Емкостные и резистивные гибкие датчики силы.
Датчики температуры используются для обнаружения изменений температуры окружающей среды, и это основано на идее, что изменение напряжения будет иметь то же значение температуры, что и окружающее, для изменения температуры. TMP35, TMP37, LM34, LM35 и другие — одни из наиболее часто используемых ИС датчиков температуры.
TMP35, TMP37, LM34, LM35 и другие — одни из наиболее часто используемых ИС датчиков температуры.
Двухмерные визуальные датчики, трехмерные визуальные датчики, датчик силы или крутящего момента и датчики обнаружения столкновений являются наиболее широко используемыми датчиками для промышленных роботов. Некоторые из них объясняются следующим образом:
2D датчик технического зренияДвумерный датчик зрения — это камера, которая, помимо прочего, может отслеживать движущиеся объекты и определять их местонахождение на конвейерной ленте. Это позволяет обнаруживать и помогать роботу в определении их местоположения, а затем робот может соответствующим образом изменять свое движение на основе полученной информации.
3D датчик технического зренияЧтобы ощутить третье измерение объекта, устройство 3D Vision должно иметь две камеры или лазерные сканеры, расположенные под разными углами. Например, для выбора и размещения деталей требуется использование технологии 3D Vision для идентификации объектов и создания 3D-изображений, а также для анализа и выбора наилучшего процесса выбора.
Например, для выбора и размещения деталей требуется использование технологии 3D Vision для идентификации объектов и создания 3D-изображений, а также для анализа и выбора наилучшего процесса выбора.
Если визуальный датчик обеспечивает робота глазами, датчик силы / крутящего момента обеспечивает роботу осязание. Сила концевого эффектора воспринимается роботом с помощью датчиков силы / крутящего момента. В большинстве случаев датчик силы / крутящего момента размещается между роботом и приспособлением, что позволяет роботу отслеживать все силы, возвращаемые к приспособлению.
Датчик обнаружения столкновенияЭтот датчик доступен в различных формах и размерах, и его основная цель — обеспечить безопасную рабочую среду для операторов, которые больше всего нужны совместным роботам.
Какие датчики есть у вспомогательных роботов?Вспомогательный робот — это компьютер, который может чувствовать, обрабатывать и выполнять действия в повседневной жизни людей с ограниченными возможностями и пожилых людей. Самым популярным применением датчиков роботов является использование ультразвукового сонара для помощи слепым. В течение многих лет роботы использовали ультразвуковые гидролокаторы в качестве системы определения местоположения.
Самым популярным применением датчиков роботов является использование ультразвукового сонара для помощи слепым. В течение многих лет роботы использовали ультразвуковые гидролокаторы в качестве системы определения местоположения.
Датчики дальности используются для определения расстояния между объектом и стороной робота. Его рабочий диапазон ограничен. Для расчета расстояния используется визуальная обработка. Роботы используют датчики дальности, чтобы перемещаться и избегать препятствий на своем пути. Специальные приложения для датчиков диапазона должны определять положение и общие характеристики формы компонента в рабочей зоне робота. Источником освещения в этих ситуациях может быть источник света, лазерный луч или ультразвук.
Датчики положения в робототехникеЛюбой датчик, который измеряет местоположение объекта для использования в приложениях управления, называется датчиком положения. Они имеют широкий спектр датчики и имеют множество применений, начиная от робототехники и заканчивая аппаратами МРТ. Это один из самых мощных датчиков, и он используется почти во всех движущихся автономных транспортных средствах.
Они имеют широкий спектр датчики и имеют множество применений, начиная от робототехники и заканчивая аппаратами МРТ. Это один из самых мощных датчиков, и он используется почти во всех движущихся автономных транспортных средствах.
Как вращательное, так и линейное движение можно измерять с помощью датчиков положения. Их можно использовать для вычисления абсолютного или относительного местоположения. Бесщеточные двигатели управляются поворотными датчиками, которые часто отслеживают угловые области различных механических устройств в системе. Моторные энкодеры — это датчики, используемые в робототехнике для отслеживания местоположения на круглом диске, преобразовывая положение в электрические импульсы, которые может использовать контролирующий объект.
Управление положением руки роботаШесть отдельных серводвигателей способны перемещать каждое соединение в типичном шестиосевом роботе. Энкодер двигателя используется на задней стороне этих серводвигателей для поддержания положения. Чтобы отслеживать вращения, производимые серводвигателем, энкодер двигателя использует вырезы в диске. Эти выключатели производят световые импульсы, которые затем преобразуются в электрические импульсы.
Чтобы отслеживать вращения, производимые серводвигателем, энкодер двигателя использует вырезы в диске. Эти выключатели производят световые импульсы, которые затем преобразуются в электрические импульсы.
Оптические датчики используются для отслеживания, подсчета и позиционирования деталей без каких-либо прикосновений. Доступны внутренние или внешние оптические датчики. Внутренние датчики обычно используются для измерения изгибов и других незначительных изменений направления, тогда как внешние датчики собирают и передают определенное количество света.
Датчики скорости в робототехникеДатчик скорости или скорости выполняет несколько измерений положения через равные промежутки времени и вычисляет скорость изменения значений положения с течением времени. Одним из основных датчиков скорости, используемых в робототехнике, является тахометр.
ТахометрТахометр — одно из самых важных устройств для обеспечения обратной связи по скорости. Он также используется как счетчик оборотов и датчик оборотов. В двигателе тахометр используется для измерения скорости вращения вала. В аналоговом устройстве выходной сигнал отображается в виде оборотов в минуту (оборотов в минуту).
Он также используется как счетчик оборотов и датчик оборотов. В двигателе тахометр используется для измерения скорости вращения вала. В аналоговом устройстве выходной сигнал отображается в виде оборотов в минуту (оборотов в минуту).
Ускорение и наклон измеряются с помощью датчика ускорения, устройства, которое измеряет ускорение, известного как акселерометр. Статическая сила и динамическая сила — это два типа сил, которые влияют на акселерометр.
- Статическая сила Это сила трения, которая существует между двумя вещами. Мы можем вычислить, насколько робот наклоняется, вычислив силу тяжести. Этот расчет помогает сбалансировать робота или решить, движется ли он в гору или по плоской поверхности.
- Динамическая сила Это относится к количеству силы, необходимой для перемещения объекта. Скорость / скорость робота можно определить путем измерения динамической силы с помощью акселерометра.
Роботы-пылесосы используют различные датчики для обнаружения препятствий и отслеживания их прогресса, а также для открытия новых областей для исследования, и эти датчики роботов-пылесосов запускают запрограммированные реакции, которые определяют, как робот должен реагировать, если он столкнется с некоторыми препятствиями.
Робот-пылесос: PicaBot; Хандитек, PicaBot Elite с технологией ActiveMapping, CC BY-SA 4.0Датчики препятствийДля работы в домашних условиях существуют различные препятствия, такие как ножки стульев и столов, диваны, подставки для другой бытовой техники, беспризорные игрушки и т.д. вниз, и этот датчик будет активирован, когда бампер столкнется с преградой, и робот автоматически получит команду развернуться и уйти.
Датчики обрываЛестница, пожалуй, самое опасное препятствие для роботов-пылесосов; падение может повредить вакуум, а также что-либо на своем пути. В результате все роботы-пылесосы должны иметь датчики обрыва в качестве меры безопасности. Они используют инфракрасные сигналы для непрерывного расчета расстояния до поверхности пола.
В результате все роботы-пылесосы должны иметь датчики обрыва в качестве меры безопасности. Они используют инфракрасные сигналы для непрерывного расчета расстояния до поверхности пола.
Они фактически помогают им обнаруживать стены с помощью инфракрасного света, чтобы они могли следовать за ними. Это позволяет им очищать края стены там, где она встречается с полом. Самое приятное то, что они могут делать это, не царапая стену, как мы иногда делаем с стоячими пылесосами.
Колесные датчикиВращение колеса робота-пылесоса измеряется с помощью световых датчиков. Он оценит, как далеко он проехал, используя это число и длину окружности колеса.
Что такое сенсорный датчик в робототехнике?Датчик касания, используемый в робототехнике, также называется тактильным датчиком. Чтобы узнать об этом подробнее, нажмите сюда.
Датчики, используемые в роботизированной сваркеЧтобы узнать о датчиках роботов, используемых в роботизированной сварке нажмите сюда.
Во многих отраслях и средах наблюдается рост спроса на жестких многоцелевых роботов, которые просты в установке. Теперь роботам необходимы сенсоры для понимания контекста и интуитивно понятные интерфейсы для простоты использования. Некоторые приложения, например, могут использовать распознавание жестов для управления физическим устройством.
В то же время защита IoT, низкое энергопотребление, безопасность и надежность — все это строгие требования. Это часто влечет за собой использование датчиков для контроля электрического тока, температуры и других переменных, чтобы гарантировать, что система работает эффективно и безопасно. В ближайшем будущем робототехника увеличит количество двигателей и универсальность окружающей среды, и во всем мире появится больше совместных роботов. Количество датчиков, используемых роботами, будет увеличиваться по мере разработки большего количества систем управления и настроек.
Датчики положения в современных роботах
Современные роботы представлены не только промышленными автоматами, но и человекообразными машинами, которые как будто пришли к нам из научной фантастики.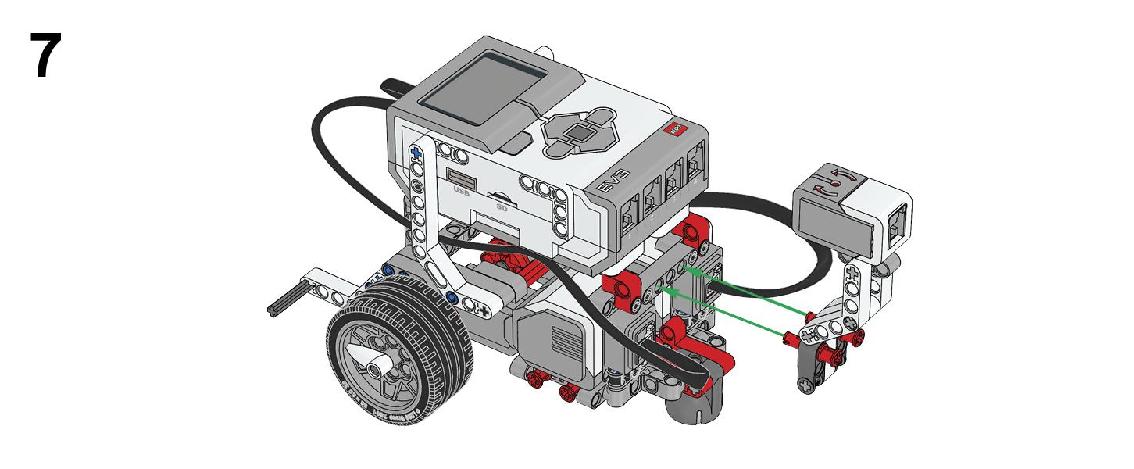 Более того, самые совершенные человекообразные роботы обладают мимикой и способны выражать эмоции не хуже, чем мы сами. Движения промышленных роботов также поражают удивительной грацией и молниеносной скоростью. Глядя на них, создается впечатление, что перед тобой живое существо, а не механическая система со сложной структурой обратных связей. Именно эти связи позволяют формировать команды, которые приводят робота в требуемое положение. Но как системный контроллер узнает, что робот принял необходимое положение? Ответ прост – с помощью датчиков.
Более того, самые совершенные человекообразные роботы обладают мимикой и способны выражать эмоции не хуже, чем мы сами. Движения промышленных роботов также поражают удивительной грацией и молниеносной скоростью. Глядя на них, создается впечатление, что перед тобой живое существо, а не механическая система со сложной структурой обратных связей. Именно эти связи позволяют формировать команды, которые приводят робота в требуемое положение. Но как системный контроллер узнает, что робот принял необходимое положение? Ответ прост – с помощью датчиков.
Успехи, достигнутые в области МЭМС-датчиков, значительно расширили возможности точного позиционирования роботов. Для определения положения в робототехнике необходимо измерять шесть основных характеристик: наклон (tilt), вращение (rotation), ускорение (acceleration), ударные нагрузки (shock), вибрацию (vibration) и расстояние до объектов (proximity).
Определение углов наклона
Измерение углов наклона играет большую роль, например, при определении положения роботизированной руки. Эта достаточно интересная задача решается несколькими способами. В первую очередь наклон может быть определен по направлению вектора силы тяжести (g). Поскольку гравитация проявляется в виде ускорения, то для обнаружения наклона подойдет 3-осевой акселерометр. Работа МЭМС-акселерометров хорошо знакома всем владельцам смартфонов. Именно акселерометр используется для ориентации экрана при повороте мобильного устройства.
Эта достаточно интересная задача решается несколькими способами. В первую очередь наклон может быть определен по направлению вектора силы тяжести (g). Поскольку гравитация проявляется в виде ускорения, то для обнаружения наклона подойдет 3-осевой акселерометр. Работа МЭМС-акселерометров хорошо знакома всем владельцам смартфонов. Именно акселерометр используется для ориентации экрана при повороте мобильного устройства.
Движение роботизированной руки, изображенной на рис. 1, определяется комплексом кинематических уравнений. Эти уравнения используются при формировании управляющих сигналов для двигателей, которые отвечают за перемещение. Для столь сложных движений крайне важно иметь информацию о текущем положении каждого элемента. Только в этом случае можно понять, принял ли робот заданное положение или нет.
Рис. 1. Роботизированная рука состоит из двух подвижных сегментов L1 и L2.
Их положение определяется углами ?1 и ?2. Акселерометры необходимы для измерения этих углов и формирования обратной связи. Получаемые данные используются в кинематических уравнениях.
Получаемые данные используются в кинематических уравнениях.
ADXL345 – 3-хосевой 13-битный цифровой МЭМС-акселерометр от Analog Devices, который может быть использован для измерения направления гравитации с последующим вычислением углов наклона в трех измерениях.
ADXL345 поддерживает диапазоны измерений ± 2g, ± 4g, ± 8g и ± 16g. Так как гравитация Земли составляет всего ± 1g, то для определения углов наклона следует использовать самый узкий диапазон ± 2g. Таким образом, эффективное разрешение составит 12 бит, что соответствует половине от максимального 13-битного разрешения датчика.
Конечно, для измерений могут быть использованы и другие диапазоны (± 4g, ± 8g и ± 16g), но эффективное разрешение в этом случае окажется еще меньше.
Для двухмерных измерений могут быть использованы узкодиапазонные 2-хосевые акселерометры, например, ADIS16003 от Analog Devices. Рабочий диапазон ADIS16003 составляет всего ±1,7g. Корпус этого датчика следует ориентировать так, чтобы оси X и Y по умолчанию были параллельны поверхности Земли и перпендикулярны вектору гравитации.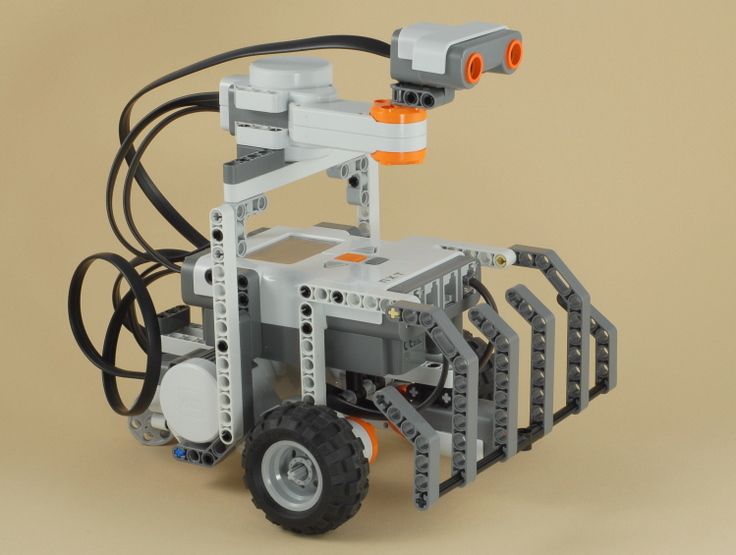 Такое положение позволяет использовать акселерометр в качестве 2-хосевого датчика наклона. Поскольку ADIS16003 обладает узким рабочим диапазоном ±1,7g, то его чувствительность в начальном положении (параллельно земле) оказывается очень высокой: 0,0175g на градус. При наклоне 45° чувствительность составит 0,0122g на градус.
Такое положение позволяет использовать акселерометр в качестве 2-хосевого датчика наклона. Поскольку ADIS16003 обладает узким рабочим диапазоном ±1,7g, то его чувствительность в начальном положении (параллельно земле) оказывается очень высокой: 0,0175g на градус. При наклоне 45° чувствительность составит 0,0122g на градус.
Выходные сигналы акселерометра характеризуют ускорение и представляются в цифровой форме. Они могут быть использованы для вычисления углов наклона в соответствии со следующими формулами:
Наклон по оси X (Pitch) = ASIN(AX/ 1g)
Наклон по оси Y (Roll) = ASIN(AY/ 1g),
где AX — ускорение вдоль оси X, AY — ускорение вдоль оси Y.
Важно отметить, что хотя в штатном режиме для измерения углов наклона будет достаточно диапазона ± 1g, однако в процессе работы могут возникать ситуации, когда ускорение будет значительно выше, например, при ударе роботизированной руки по объекту или при резком торможении.
Вращающиеся механизмы
Вращение механизмов используется для различных целей. Например, на производстве применяется широкий спектр вращающихся инструментов: отвертки, дрели, зажимы и др. Если наклон определяется линейными перемещениями, то вращение характеризуется угловой скоростью. Кроме того в отличие от наклона, вращение не всегда сопровождаться изменением направления ускорения, что делает бесполезным применение акселерометров. Например, если 3-хосевой акселерометр вращается вдоль оси Z, перпендикулярной Земле, а ось X и Y параллельны Земле, то по оси Z будет наблюдаться постоянное ускорение 1g, а по осям X и Y ускорение 0g, то есть в этой ситуации вращение акселерометра вдоль оси Z не приведет к изменению показаний акселерометра. По этой причине для измерения вращения применяют специальные датчики – МЭМС-гироскопы.
Например, на производстве применяется широкий спектр вращающихся инструментов: отвертки, дрели, зажимы и др. Если наклон определяется линейными перемещениями, то вращение характеризуется угловой скоростью. Кроме того в отличие от наклона, вращение не всегда сопровождаться изменением направления ускорения, что делает бесполезным применение акселерометров. Например, если 3-хосевой акселерометр вращается вдоль оси Z, перпендикулярной Земле, а ось X и Y параллельны Земле, то по оси Z будет наблюдаться постоянное ускорение 1g, а по осям X и Y ускорение 0g, то есть в этой ситуации вращение акселерометра вдоль оси Z не приведет к изменению показаний акселерометра. По этой причине для измерения вращения применяют специальные датчики – МЭМС-гироскопы.
Когда гироскоп вращается вокруг своей оси, его внутренняя чувствительная механическая система испытывает воздействие силы Кориолиса.
Рис. 2. Принцип работы МЭМС-гироскопа
МЭМС-гироскопы семейства iSensor от Analog Devices предназначены для обнаружения и точного измерения угловой скорости вращения. Они демонстрируют высокую надежность при работе в суровых условиях промышленного производства. Следует помнить о том, что не все гироскопы оказываются совместимыми между собой, поэтому крайне важно выбирать оптимальный гироскоп для каждого конкретного приложения.
Они демонстрируют высокую надежность при работе в суровых условиях промышленного производства. Следует помнить о том, что не все гироскопы оказываются совместимыми между собой, поэтому крайне важно выбирать оптимальный гироскоп для каждого конкретного приложения.
Наиболее важными характеристиками гироскопов являются рабочий диапазон и чувствительность.
Рабочий диапазон определяется максимальной скоростью вращения, которую способен точно измерить гироскоп. Этот параметр выражается в градусах в секунду (°/сек).
Чувствительность определяется отношением изменения выходного сигнала к изменению скорости. Чем быстрее вращается гироскоп, тем выше напряжение. Чувствительность измеряется в милливольтах на градус в секунду (мВ/°/сек).
Если скорость вращения механизма велика, требуется гироскоп с широким диапазоном. Например, ADIS16266BCCZ от Analog Devices способен измерять скорость вращения до ± 14 000 °/сек. Для медленно вращающихся механизмов подойдет гироскоп ADIS16060BCCZ с диапазоном 80 °/сек. При работе с точными аналоговыми датчиками важно гарантировать минимальное падение напряжения при передаче сигнала в управляющий контроллер. Миниатюрный водонепроницаемый разъем Mizu-P25 от Molex обеспечивает контактное сопротивление всего 10 мОм и рейтинг пыле- и влагозащиты IP67. Он подходит для работы с сигналами малой амплитуды в условиях высокой вибрации.
При работе с точными аналоговыми датчиками важно гарантировать минимальное падение напряжения при передаче сигнала в управляющий контроллер. Миниатюрный водонепроницаемый разъем Mizu-P25 от Molex обеспечивает контактное сопротивление всего 10 мОм и рейтинг пыле- и влагозащиты IP67. Он подходит для работы с сигналами малой амплитуды в условиях высокой вибрации.
Ударные нагрузки
Роботы иногда сталкиваются с другими объектами. Это может быть как аварийной, так и вполне штатной ситуацией. Удар представляет собой внезапное изменение ускорения, поэтому его легко обнаружить с помощью акселерометра. Однако в этом случае большое значение имеет положение датчика. Например, при ударе роботизированной руки о препятствие, максимальное ускорение испытает именно та часть, которая коснулась поверхности объекта. В то же время для других частей удар будет менее ощутимым.
Очень часто ударное воздействие должно быть обнаружено и обработано как можно скорее. Примером этого является отвод считывающей головки внутри жесткого диска в персональных компьютерах.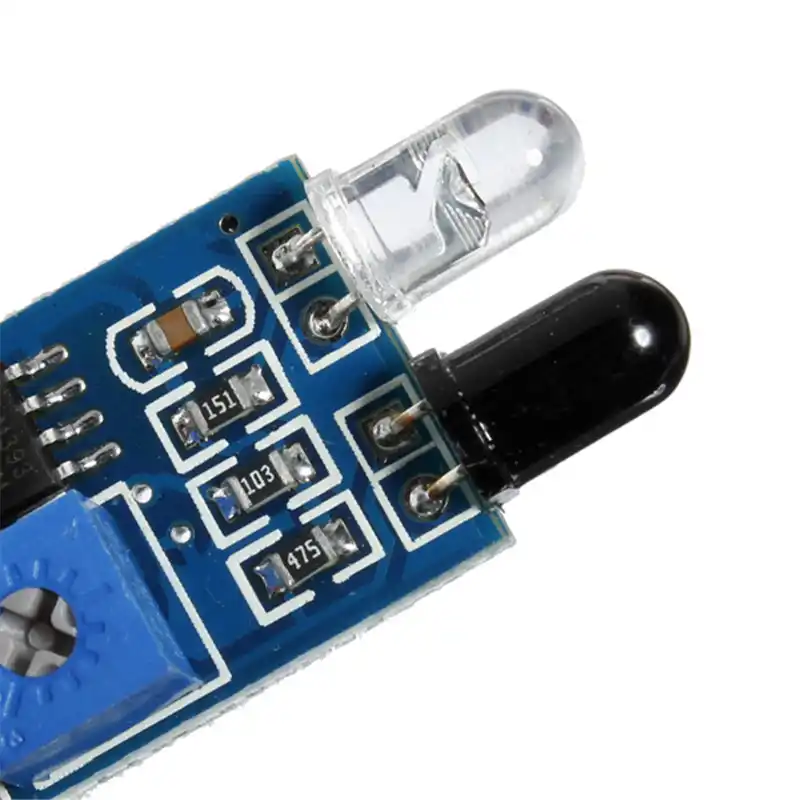
Если жесткий диск упал на твердый пол, встроенный акселерометр сразу обнаруживает удар. При этом считывающая головка должна быть удалена от поверхности диска в течение нескольких миллисекунд, чтобы не оставить царапин и не повредить хранящихся данных. Очевидно, что быстрое обнаружение такого события зависит от правильного позиционирования акселерометра.
Примерно то же самое требуется и при эксплуатации роботизированной руки. Акселерометры и гироскопы отслеживают правильность положения механизмов в соответствии с заданной программой движения. Однако, если возникла аварийная ситуация, и движение было заблокировано, критически важно, чтобы удар был быстро и надежно обнаружен и обработан.
Наиболее страшным примером является столкновение робота и человека. Для обеспечения защиты в таких случаях требуется специальный акселерометр. Более того, для гарантированной безопасности, в системе может использоваться несколько резервных акселерометров.
Вибрационные нагрузки
Вибрация в подавляющем большинстве случаев представляет собой негативное явление. Она, как правило, свидетельствует о наличии механических неисправностей, таких, например, как износ подшипников, поломка компонентов, недостаток смазки, нарушение соосности и выравнивания, разбалансировка и т.д. Таким образом, вибрация затрагивает одновременно и вопросы обслуживания и вопросы безопасности. Контроль вибрации может потребоваться для мониторинга состояния промышленных роботов, для общей диагностики и для выполнения упреждающего защитного отключения.
Она, как правило, свидетельствует о наличии механических неисправностей, таких, например, как износ подшипников, поломка компонентов, недостаток смазки, нарушение соосности и выравнивания, разбалансировка и т.д. Таким образом, вибрация затрагивает одновременно и вопросы обслуживания и вопросы безопасности. Контроль вибрации может потребоваться для мониторинга состояния промышленных роботов, для общей диагностики и для выполнения упреждающего защитного отключения.
Вибрационный датчик ADIS16229 со встроенным радиопередатчиком от Analog Devices представляет собой беспроводную портативную платформу для промышленных приложений. Он обеспечивает мониторинг и регистрацию вибрационных нагрузок при работе в промышленных условиях.
Рис. 3. Вибрационный датчик ADIS16229 со встроенным радиопередатчиком от Analog Devices и ВЧ-разъемом Brass SMA от Molex
На плате датчика расположен ВЧ-разъем SMA от Molex, который имеет резьбовую фиксацию и гарантирует надежное соединение при наличии значительных ударных и вибрационных воздействий. Разъемы SMA обеспечивают минимальное отражение и затухание на частотах более 900 МГц.
Разъемы SMA обеспечивают минимальное отражение и затухание на частотах более 900 МГц.
Защита от избыточных ускорений
Измерение ускорений с помощью акселерометров может использоваться, как для непосредственного обнаружения движения, так и для определения положения объекта. В частности, акселерометр поможет разобраться – был ли объект поднят с пола или поставлен.
С другой стороны МЭМС-акселерометр может использоваться для защиты робота от избыточных ускорений. Например, если внешние силы начинают воздействовать на робота и заставляют его двигаться со скоростью, превышающей безопасное значение, акселерометр фиксирует аварийную ситуацию и выполняет защитное отключение.
Датчики приближения
Датчики приближения позволяют обнаруживать присутствие объектов без необходимости в физическом контакте. Это может оказаться важным как с точки зрения безопасности, так и полезным с точки зрения удобства эксплуатации. В качестве примера можно привести сенсоры CapSense от Cypress Semiconductor. Датчик CY8CKIT-024 CapSense совместно с отладочным набором Cypress Pioneer kit, становится готовым решением для обнаружения объектов.
Датчик CY8CKIT-024 CapSense совместно с отладочным набором Cypress Pioneer kit, становится готовым решением для обнаружения объектов.
Датчик CapSense создается вокруг себя электрическое поле (рис. 4). Силовые линии этого поля замыкаются на землю и окружающие объекты, тем самым образуя пространственный конденсатор, емкость которого может быть измерена. При приближении объекта часть линий электрического поля начинает замыкаться через него, изменяя общую емкость пространственного конденсатора. Измерительная схема датчика CapSense фиксирует эти изменения и определяет расстояние до объекта, а также его положение.
Рис. 4. Емкостной датчик CapSense от Cypress
На рисунке 4:
- CX = общая емкость, измеренная датчиком CapSense
- CP = паразитная емкость датчика
- CF = емкость, добавленная объектом
Таким образом, датчики CapSense обеспечивают трехмерное распознавание объектов и жестов. Рассмотренное решение будет полезно для роботов, использующихся на сборочных линиях. Датчики CapSense также можно применять в качестве аварийных сенсоров, которые будут предотвращать столкновение роботов с препятствиями.
Датчики CapSense также можно применять в качестве аварийных сенсоров, которые будут предотвращать столкновение роботов с препятствиями.
Заключение
МЭМС-датчики широко используются в робототехнике для позиционирования, защиты и диагностики. Гироскопы и акселерометры, а также более сложные бесконтактные сенсоры, являются основными датчиками в современных автоматизированных системах. МЭМС-сенсоры расширяют возможности роботов, повышают уровень безопасности, обеспечивают рост производительности и одновременное снижение стоимости.
Автор: Билл Джиовино Перевод: Гавриков Вячеслав (г. Смоленск)
Производители: Analog Devices
Разделы: Аналого-цифровые преобразователи, Акселерометры, Гироскопы
Опубликовано: 06.09.2018
Роботизированные датчики
FutureLearn использует куки-файлы для повышения удобства пользования веб-сайтом. Все файлы cookie, кроме строго необходимых, в настоящее время отключены для этого браузера. Включите JavaScript, чтобы применить настройки файлов cookie для всех необязательных файлов cookie. Вы можете ознакомиться с политикой FutureLearn в отношении файлов cookie здесь.
Все файлы cookie, кроме строго необходимых, в настоящее время отключены для этого браузера. Включите JavaScript, чтобы применить настройки файлов cookie для всех необязательных файлов cookie. Вы можете ознакомиться с политикой FutureLearn в отношении файлов cookie здесь.
Роботы, особенно автономные, должны чувствовать окружающий мир. Вот несколько из множества доступных опций для добавления датчиков к вашей коляске.
Роботы, особенно автономные, должны ощущать окружающий мир. На этом этапе я познакомлю вас с несколькими из множества доступных опций для добавления датчиков к вашей коляске.
Сила и прикосновение
Робот, предназначенный для навигации в реальном мире и взаимодействия с физическими объектами, например, путем их поднятия, должен иметь возможность измерять силу, которую он прикладывает к этим объектам. В некоторых случаях роботу может быть необходимо ощущать внешние силы, воздействующие на него.
Сила
Датчики силы используются робототехниками для измерения сил, которые их роботы, такие как роботизированная рука, собирающая мобильные телефоны, о которой вы слышали на прошлой неделе, воздействуют на объекты, с которыми они взаимодействуют. Важно, чтобы рука прикладывала достаточную силу, чтобы удерживать деталь и не уронить ее, но не настолько сильно, чтобы компонент был поврежден или раздавлен.
Другие робототехники используют датчики силы для обнаружения ударов или вибраций, чтобы позволить роботу реагировать и балансировать/стабилизировать себя. Мобильные роботы также могут использовать датчики силы в навигации, хотя датчики касания более распространены.
Прикосновение
Сенсорные датчики позволяют роботам обнаруживать физические взаимодействия между их телом и объектами в их окружении. Емкостные сенсорные датчики используют проводящие свойства для обнаружения прикосновений, чаще всего от прикосновения человека, но подойдет любой объект, который может проводить электричество.
Обнаружение окружающей среды
Роботы могут использовать измерения окружающей среды, чтобы влиять на свое поведение или просто собирать данные для анализа.
Температура
Температурные датчики можно использовать в самых разных целях, а не только для сбора данных для научных экспериментов. Марсоход на Марсе может использовать свой датчик температуры для оценки местности, по которой он катится; если он обнаруживает падение температуры, он может уменьшить крутящий момент на своих колесах, чтобы подготовиться к обледенению. Робот, предназначенный для тушения пожаров, может использовать датчик температуры, чтобы направить себя к самым горячим частям горящего здания, где он будет наиболее эффективен.
Свет
Другим обнаруживаемым свойством окружающей среды является свет. Если у робота есть задачи, которые нужно выполнять ночью и днем, он может обнаружить снижение уровня освещенности и изменить свое поведение на ночной режим. Изменения в освещении также могут указывать на изменение окружения; робот, предназначенный для исследования домов в зонах стихийных бедствий, может использовать датчики света, чтобы помочь ориентироваться в разрушенном доме, направляясь на свет, чтобы выбраться из ограниченного пространства.
Звук
Датчики звука действуют аналогично микрофонам, но часто подключаются к схемам, которые сравнивают амплитуду звука с пороговым значением, возвращая результат этого сравнения роботу. Чем выше амплитуда, тем громче шум. Это может быть использовано роботом, предназначенным для изучения дикой природы; обнаружение и отслеживание громких шумов может быть одним из элементов данных, которые используются для определения местонахождения дикой природы. Более сложным применением может быть датчик звука для распознавания речи, реагирующий на команды, произносимые пользователем.
Более сложным применением может быть датчик звука для распознавания речи, реагирующий на команды, произносимые пользователем.
Химический
Роботы также могут использовать специальные датчики для обнаружения определенных химических свойств. Например, датчики pH определяют кислотность или щелочность среды вокруг робота. Научные роботы могли бы использовать это для проверки качества рек или почвы в отдаленных местах. Угарный газ ядовит, и роботы, оборудованные для обнаружения этого газа, могут использоваться для наблюдения за потенциально опасными средами, где люди-исследователи могут подвергаться риску.
Близость объекта
Мобильные роботы должны ориентироваться в окружающем мире, часто автономно, и есть датчики, которые помогают им обнаруживать близость других объектов вокруг них.
Инфракрасные датчики
Инфракрасные датчики обнаруживают изменения уровней инфракрасного излучения, улавливаемого устройством. Эти изменения возникают, когда объект (часто живое), более горячий, чем фон, проходит через поле зрения датчика.
Ультразвуковые датчики расстояния
Лучшим датчиком для роботов, которые должны перемещаться вокруг неодушевленных объектов, является ультразвуковой датчик расстояния (UDS). Датчики этого типа издают высокочастотные шумы, которые отражаются от окружающих объектов и возвращаются к роботу. Вот как летучие мыши ощущают мир, когда летают ночью.
Вы собираетесь использовать UDS в своем багги, и на следующем шаге вы более подробно увидите, как они работают.
Обсуждение
Выберите один из типов датчиков, которые вы видели на этом шаге.
Придумайте другое применение этого датчика в робототехнике, исходя из прошлого опыта или из своего воображения.
Поделитесь своими идеями в разделе комментариев.
Эта статья взята из бесплатного онлайн-ресурса
Робототехника с Raspberry Pi: собери и запрограммируй свой первый робот-багги
Создано
Присоединяйся сейчас
Мы предлагаем широкий выбор курсов от ведущих университетов и учреждений культуры со всего мира. Они предоставляются поэтапно и доступны на мобильных устройствах, планшетах и компьютерах, поэтому вы можете приспособить обучение к своей жизни.
Они предоставляются поэтапно и доступны на мобильных устройствах, планшетах и компьютерах, поэтому вы можете приспособить обучение к своей жизни.
Мы считаем, что обучение должно быть приятным, социальным опытом, поэтому наши курсы дают возможность обсудить то, что вы изучаете, с другими, помогая вам делать новые открытия и формировать новые идеи.
Вы можете разблокировать новые возможности с неограниченным доступом к сотням коротких онлайн-курсов в течение года, подписавшись на наш безлимитный пакет. Развивайте свои знания в ведущих университетах и организациях.
Узнайте больше о том, как FutureLearn меняет доступ к образованию
Роботизированные датчики — лучший друг человека (новейший)
От простых до сложных приложений роботы зависят от роботизированных датчиков с точки зрения эффективности, безопасности и производительности.
Содержание
- Что такое роботизированный датчик?
- Почему роботы используют датчики?
- Как работает датчик робота?
- Какие типы датчиков используются в роботах?
- Какой датчик выбрать для своего робота?
От простых до сложных приложений роботы зависят от роботизированных датчиков для эффективности, безопасности и производительности.
Роботизированные датчики позволяют системам (полностью автоматизированным и дистанционно управляемым) измерять свойства физического мира.
Датчики, используемые в роботах, обычно основаны на электромеханических схемах и могут быть двух основных типов: цифровые и аналоговые. Оба могут быть направлены на микроконтроллер.
Легко сравнить цифровые и аналоговые часы. Аналоговые часы сообщают вам, что делают стрелки, и вы интерпретируете время на основе универсального измерения (циферблата). Цифровые часы отслеживают время и сообщают вам, который сейчас час, на своих показаниях.
Как и в случае с часами, аналоговые датчики, как правило, достаточно просто включить в систему. Цифровые датчики, хотя и более способны выполнять процессы интерпретации при считывании, обычно более сложны.
Благодаря достижениям в инженерных технологиях вам не нужно так сильно беспокоиться о цифровых или аналоговых датчиках. Взгляните на наш полный набор высококачественных датчиков, готовых вывести ваше автоматизированное системное приложение на новый уровень.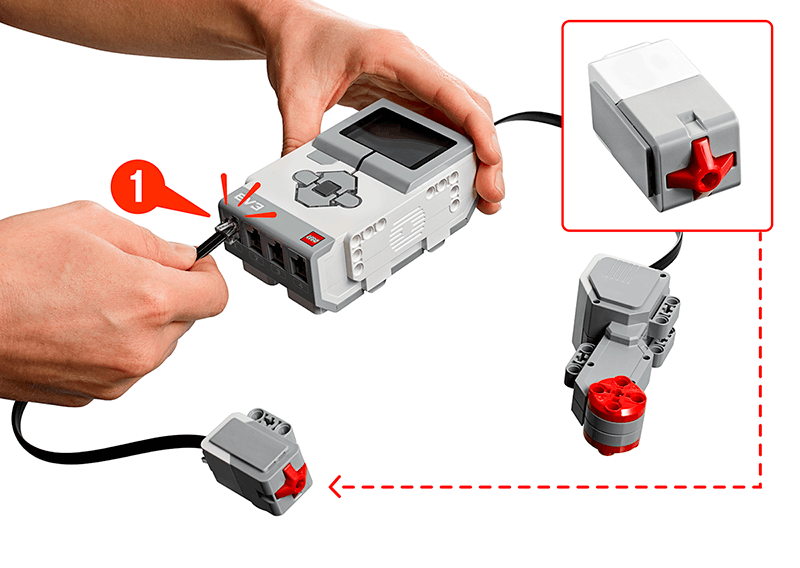
Роботы используют датчики для оценки своего окружения, чтобы они могли реагировать на окружающую среду и управлять ею.
Роботы в некотором смысле являются расширением и увеличением человеческих возможностей. Таким образом, роботизированные датчики можно рассматривать как зеркала человеческих органов чувств.
Точно так же, как люди становятся менее эффективными, когда чувства удаляются или уменьшаются (представьте себе, закрывая один глаз и играя в мяч), робототехника в высшей степени зависит от своих датчиков для эффективности, безопасности и правильной работы.
Давайте рассмотрим пять человеческих чувств, которые мы все знаем и любим,
- Слух
- Прицел
- Запах
- Вкус
- Сенсорный
Существуют роботизированные датчики, которые легко приспосабливаются к этим чувствам, например:
- Звуковые и ультразвуковые датчики
- Датчики обнаружения объектов и приближения/дальности (LiDAR, радар и т.
 д.)
д.) - Газовые датчики (с учетом запаха и вкуса)
- Контактные датчики
Вот и все. Все, что нужно сделать инженерам, — это включить эти пять чувств в систему робототехники. В конце концов, не так уж много чувств, верно?
Неправильно.
Если у вас есть опыт в робототехнике или науках о жизни, вы знаете, что это явно не так. Мало того, что включение всего пяти чувств сложнее, чем кажется на поверхностном уровне, ваш мозг и тело распознают гораздо больше чувств.
Вот краткий список некоторых других сенсоров в нашем теле, для которых наш мозг вычисляет:
- Проприоцепция (где тело и каждый сустав в отдельности соотносятся с остальными)
- Стереогноз (относительный вес, способность ощущать свойства объекта посредством осязания)
- Датчики растяжения и напряжения (волокна мышечного веретена и сухожильные органы Гольджи обнаруживают, когда мышца слишком сильно растянута или нагрузка слишком велика для данного сустава)
- Терморецепторы (термочувствительные)
- Ноцицепция (обработка и определение «боли» или опасности для тела)
- Вестибулярное чувство (способность определять, стоите ли вы прямо и в какую сторону поворачиваетесь)
- Восприятие глубины (насколько далеко находится объект)
Человеческий мозг обрабатывает все это и многое другое и координирует их вместе для выполнения функций жизни и жизни.
Неудивительно, что мы назвали нашу технологию интеграции оборудования с программным обеспечением «мозговой ствол» в честь оригинального суперкомпьютера.
Теперь, когда мы вкратце рассмотрели потребность в датчиках в робототехнических системах, давайте рассмотрим, как роботы их используют на практике.
Как работает датчик робота?
Это зависит от типа датчика, но большинство из них полагаются на передачу выходных данных, получение входных данных и использование различий в сигналах для проведения наблюдений и оценок.
Несколько типов датчиков используются для того, чтобы автоматизированные системы могли оценивать окружающую среду и взаимодействовать с ней.
Если вы хотите получить полное представление о функциях датчиков и вариантах их использования, посетите нашу страницу описания датчиков.
Гидролокатор — хороший пример для объяснения того, как работают сенсоры, потому что гидролокаторы бывают активными и пассивными. Пассивные сонарные датчики используют микрофон для приема звуковых волн. Интенсивность звуковых волн можно использовать для определения определенных качеств воспринимаемой «вещи». Благодаря использованию нескольких пассивных датчиков сонара вы можете триангулировать положение и расстояние до объекта.
Пассивные сонарные датчики используют микрофон для приема звуковых волн. Интенсивность звуковых волн можно использовать для определения определенных качеств воспринимаемой «вещи». Благодаря использованию нескольких пассивных датчиков сонара вы можете триангулировать положение и расстояние до объекта.
Активные датчики сонара представляют собой своего рода «новую эру» датчиков, которые работают более эффективно. Активный сонарный датчик не только принимает звуковые волны, но и излучает их. Излучая звуковые волны и принимая эхо или отраженные звуковые волны, один активный гидроакустический датчик может выполнять задачи определения местоположения и дальности.
Конечно, датчики бесполезны без процессора. Информация не имеет смысла, если ее не интерпретировать.
В робототехнике типы используемых датчиков зависят от задач, которые выполняет робот. В роботах-пылесосах используются контактные датчики в виде бамперов, которые сообщают компьютеру, что он нашел стену. Компьютер принимает эту информацию и приказывает колесам повернуть вакуум вокруг оси и попытаться двигаться в другом направлении.
Датчики промышленной робототехники могут использоваться для точного и быстрого измерения наполнения продуктов для упаковки с использованием времени пролета (ToF). Тепловые датчики могут предоставлять визуальную информацию в целях безопасности — информацию, которую людям часто было бы опасно оценивать на ощупь.
Во-первых, вам будет сложно найти аналоговые датчики в автономной системе. Таким образом, цифровые датчики используются в роботах, если у робота нет функции сообщать вам некоторую информацию, которую можно выразить в аналоговом виде.
Давайте представим, что у вас есть робот-собака (лучший друг человека?), которому нужно пройти через 5 различных типов датчиков, используемых в роботах.
1. Камеры в роботах
Камеры все чаще используются в автоматизированных и автономных системах. Как и в случае с беспилотными автомобилями, изображение с камеры из «глаз» вашей собаки-робота может быть интерпретировано программой распознавания, которая сообщает ей, когда нужно трясти хвостом, когда она видит что-то, напоминающее кость.
Допустим, вы хотите, чтобы ваша собака не взаимодействовала с предметами, которые могут повредить ее поверхность. У вас могут быть тепловизионные камеры, которые передают процессору информацию о температуре с цветовой кодировкой и сообщают собаке, чтобы она избегала объектов с температурой выше определенной в окружающей среде.
Тепловые датчики (например, Terrabee EVO Theraml 33) в сочетании с камерами также могут использоваться для обнаружения и подсчета людей, а также для проверки безопасности на нефтяных вышках или рядом с ними.
2. Дальномерные датчики
Датчики, используемые для измерения расстояний, используют принцип, известный как время пролета. Проще говоря, этот принцип сравнивает время, которое требуется излучаемой волновой частице, чтобы уйти и вернуться к датчику. Это время определяется для расстояния с учетом среды, через которую прошла световая, звуковая или радиочастотная волна.
С помощью дальномерных датчиков ваша собака-робот может определить расстояние между собой и диваном, на который она намеревается запрыгнуть, и приложить необходимое усилие, чтобы не попасть ни в цель, ни в цель.
Как и в случае с дронами, датчик ToF можно использовать для определения расстояния от земли и поддержания или надлежащего приспособления к этому расстоянию.
В промышленности датчики ToF использовались для сложных деталей автоматизации наполнения и для широкомасштабного измерения покрытия поверхности земли в сельскохозяйственной промышленности.
3. Сонарные датчики в роботах
Как известно, гидролокатор часто используется в морских или океанических функциях, потому что звуковые волны распространяются в воде быстрее, чем другие типы волн частиц.
Однако, как упоминалось выше, ультразвуковые датчики гидролокатора могут использоваться для ToF в надводных приложениях (у нас есть качественный и доступный гидролокатор-дальномер Devantech, такой как SRF05). Поскольку они не так быстро и далеко перемещаются по воздуху, как в воде, но довольно легкие и компактные, вы можете поместить их в свою собаку-робота для ближнего действия и уклонения от объектов.
Вы также можете прикрепить к роботизированному щенку микрофон, чтобы он мог при правильном программировании «слышать» и узнавать ваш голос и/или команды.
В сфере производства и обеспечения безопасности гидроакустические датчики — отличный выбор, поскольку они не так ограничены условиями, как световые датчики. Например, в плохую погоду у датчика LiDAR могут возникнуть проблемы с обнаружением чего-либо сквозь капли дождя. В этом случае ультразвуковой датчик с меньшей вероятностью будет «отвлекаться» на условия и лучше подходит для поиска цели под дождем.
Тем не менее, если сонар не работает для вас в плохих условиях, вы можете попробовать радар.
4. Робототехника с использованием радара
Поскольку радиочастотные волны имеют большую длину волны, чем свет, разрешение радара по сравнению с LiDAR может быть низким (хотя существуют коротковолновые приложения, называемые миллиметровыми радарами).
Это делает радар превосходным средством обнаружения объектов на большом расстоянии в любых условиях. Поскольку радиолокационное изображение может не обнаруживать более мелкие детали окружающей среды, вероятность того, что он «пропустит» цель из-за дымки или пыли, меньше всего. Сельскохозяйственные и аэрокосмические приложения могут особенно полагаться на радар.
Поскольку радиолокационное изображение может не обнаруживать более мелкие детали окружающей среды, вероятность того, что он «пропустит» цель из-за дымки или пыли, меньше всего. Сельскохозяйственные и аэрокосмические приложения могут особенно полагаться на радар.
Ваша собака-робот могла бы использовать радар, если бы у нее была запрограммирована охотничья собака, и она могла бы обнаруживать объекты на расстоянии, отвлекаясь. Было бы полезно расположить датчик на вращающейся голове собаки, так как радар имеет относительно узкое поле зрения.
5. Датчики LiDAR в робототехнике
LiDAR использует световые волны для обнаружения объектов и измерения расстояний. Поскольку световые волны имеют такую короткую длину волны и высокую частоту, датчики LiDAR могут обнаруживать сверхтонкие детали при больших степенях поля.
Если ваша собака-робот участвовала в спасательных операциях или в обеспечении безопасности зданий, ей может быть полезен или необходим лидар. Благодаря высокому разрешению датчики LiDAR могут «замечать» и, следовательно, реагировать на более дискретную информацию.
LiDAR часто выбирают для приложений 3D-визуализации благодаря использованию «облака точек». Быстро определяя расстояние до нескольких объектов с высоким разрешением, автономная система может создавать высококачественные изображения для использования ИИ или сравнительного анализа.
Тип датчика, который вы выбираете, должен быть совместим с предполагаемой целью вашей автоматизированной системы и подходить для среды, в которой она будет функционировать. С таким разнообразием доступных приложений датчиков может быть сложно принять решение. Мы готовы предложить наш опыт и помочь вам принять решение, свяжитесь с нами для помощи!
Например, несмотря на то, что LiDAR обеспечивает визуализацию и обнаружение объектов с самым высоким разрешением, он может оказаться слишком тяжелым для вашего бота. К счастью, существует несколько способов интеграции различных датчиков и учета их различий.
Приобретите нашу линейку высококачественных датчиков для плавной интеграции и работы вашей автономной системы.
Робототехника 101: датчики, позволяющие роботам видеть, слышать, трогать и двигаться | Возможность
Датчики зрения, звука, движения и касания позволяют современным роботам выполнять все более сложные задачи.
BY Возможность Редакция 3 марта 2022 г.
- Твиттер
- Фейсбук
- Электронная почта
Вы когда-нибудь видели робота-гуманоида, занимающегося паркуром?
Две руки, две ноги, квадратная голова и толстое прямоугольное туловище прыгает по коробкам и деревянным поддонам. Он даже сделал сальто назад.
Да, большинство роботов на это не способны.
Большинству роботов для этого не нужен .
Крутой паркур-робот — Atlas от Boston Dynamics — представляет собой экспериментальную исследовательскую платформу, которую компания использует для проверки и развития физической ловкости роботов. Он учится своим милым движениям в первую очередь посредством имитации и мимикрии. И хотя Атлас интересен и делает хорошее вирусное видео, роботы-гуманоиды являются исключением в мире робототехники. Для практических приложений они совершенно бесполезны.
Он учится своим милым движениям в первую очередь посредством имитации и мимикрии. И хотя Атлас интересен и делает хорошее вирусное видео, роботы-гуманоиды являются исключением в мире робототехники. Для практических приложений они совершенно бесполезны.
Роботы обычно используются для выполнения задач, которые считаются «скучными, грязными или опасными». Самый распространенный тип роботов, которые вы найдете в мире, — это промышленные роботы, такие как компании, производящие шарнирные руки, которые используют на сборочных линиях. Роботизированные руки имеют устойчивое неподвижное основание, состоящее из двух-пяти подвижных суставов, и придаток на конце, называемый манипулятором, который функционирует как рука. Другие распространенные роботы — это профессиональные сервисные роботы, такие как логистические роботы, похожие на большие хоккейные шайбы, которые Amazon использует для перемещения товаров по складу, или бытовые роботы, которые пылесосят ваш дом.
Ни один из этих роботов не занимается паркуром.
Роботы часто определяются как физические машины, которые могут «чувствовать, думать и действовать». Датчики измеряют внешние условия и передают эти данные компьютерному процессору или контроллеру внутри робота, который анализирует эти данные, а затем решает, как действовать. Например, робот-пылесос будет использовать видеодатчик для изображения комнаты, определения небольшого количества грязи, а затем двигаться, чтобы пропылесосить ее.
Роботы в той или иной форме могут выполнять практически любую задачу, которую может придумать человек. Таким образом, роботам нужен широкий набор датчиков, чтобы ощущать мир и двигаться в нем.
Датчики зрения
Роботам обычно нужно видеть, что они делают. Но роботы обычно видят не так, как человек. Человеческий глаз — один из самых сложных датчиков, когда-либо созданных. Роботам не требуется почти такая же ясность и сосредоточенность, они могут обойтись простыми датчиками зрения, которые в сочетании с программным обеспечением для машинного обучения могут позволить роботу делать практически все, что мы хотим.
Например, роботы-пылесосы Roomba от iRobot используют не высокотехнологичные датчики, а недорогие камеры, которые можно было найти в смартфонах более 10 лет назад. По большей части роботы не пытаются разобрать изображения высокой четкости (для обработки которых требуется больше внутренних вычислительных мощностей и может сократить срок службы батареи), а скорее ищут общие формы, очертания или цвета, которые алгоритм компьютерного зрения может понять. идентифицировать.
Общие типы датчиков зрения в робототехнике включают 2D- и 3D-камеры, лидары, радары, инфракрасные датчики и фототранзисторы. Если система зрения работает в видимом диапазоне, то становится необходимым освещение, где другие датчики зрения позволяют роботам работать в темноте. Общие задачи видимого света включают в себя задачи по сборке или сборке, обнаружение объектов, навигацию и некоторые виды проверки.
Один интересный пример называется роботом в стиле «дельта», который вы можете найти на конвейерной ленте фабрики по производству потребительских товаров. Робот висит над конвейерной лентой и использует простые датчики зрения, такие как камера и/или сканер штрих-кода, для идентификации товаров, поступающих по линии. Затем он будет использовать свои манипуляторы, похожие на маленькие присоски, чтобы собирать предметы и упаковывать их в коробки для отправки.
Робот висит над конвейерной лентой и использует простые датчики зрения, такие как камера и/или сканер штрих-кода, для идентификации товаров, поступающих по линии. Затем он будет использовать свои манипуляторы, похожие на маленькие присоски, чтобы собирать предметы и упаковывать их в коробки для отправки.
Некоторые распространенные варианты использования роботом датчиков зрения включают:
- Обеспечение качества : использование датчиков для быстрой оценки наличия дефекта в продукте.
- Обнаружение объекта : увидеть объект и определить, что это такое.
- Погрузочно-разгрузочные работы : идентифицируйте материал и перемещайте его с места на место.
- Навигация : избегайте препятствий при перемещении по комнате, чтобы добраться из одной точки в другую.
- Картографирование : увидеть область и создать ее компьютерную модель.
Аудиосенсоры
Зачем роботу слышать? Царство роботов стремительно меняется. В течение многих лет большинство роботов представляли собой шарнирные манипуляторы, используемые на заводах или в других профессиональных службах на фабриках или складах. Роботам в таких условиях почти не нужно слышать.
Поскольку роботы все больше взаимодействуют с людьми, звуковые датчики становятся все более важными. Аудиосенсоры — в основном микрофоны — часто используются для распознавания речи, чтобы человек мог поговорить с роботом, и он смог «понять», а затем действовать. Аудиодатчики также можно использовать для навигации (например, сонар или эхолокация) или для обнаружения перепадов давления в окружающей среде.
К распространенным типам аудиодатчиков и разновидностей микрофонов относятся: датчики акустического давления, микрофоны давления, высокоамплитудные микрофоны давления и зондовые микрофоны.
Интересная гипотеза: умные колонки с виртуальными помощниками считаются роботами? Siri, Alexa, Cortana и Google Assistant делают то, что делает робот в соответствии с нашим определением выше. Они чувствуют с помощью микрофонов, затем обрабатывают речь, затем реагируют (ощущают, думают и действуют). И все же большинство людей не отнесли бы их к роботам.
Они чувствуют с помощью микрофонов, затем обрабатывают речь, затем реагируют (ощущают, думают и действуют). И все же большинство людей не отнесли бы их к роботам.
Датчики движения
Датчики движения часто работают в сочетании с движущимися частями робота (приводами), чтобы помочь роботу двигаться. Один из наиболее распространенных типов датчиков движения называется инкрементным энкодером, который часто используется в промышленном роботизированном манипуляторе. Он измеряет вращение суставов на руке, чтобы она двигалась под правильным углом и скоростью.
Другие датчики движения включают акселерометры, гироскопы, инерциальные датчики и датчики GPS.
Сенсорные датчики
Вы бы не подумали, что робот должен «чувствовать», как человек. Но сенсорные датчики позволяют роботам иметь более тонкие возможности, чем обычное «видеть объект, двигаться и объект», для которого они часто используются.
Роботы используют сенсорные датчики для различных задач. Например, датчики ударов используются для навигации, чтобы сообщить роботу, что он столкнулся с объектом и, следовательно, должен изменить курс. Датчики силы позволяют роботу узнать, когда применяется давление или механическое напряжение. Датчики температуры сообщают роботу, является ли что-то горячим или холодным (и, следовательно, их следует избегать).
Например, датчики ударов используются для навигации, чтобы сообщить роботу, что он столкнулся с объектом и, следовательно, должен изменить курс. Датчики силы позволяют роботу узнать, когда применяется давление или механическое напряжение. Датчики температуры сообщают роботу, является ли что-то горячим или холодным (и, следовательно, их следует избегать).
Слияние датчиков: объединение датчиков для создания более полных роботов
Резкое увеличение вычислительной мощности компьютеров (наряду с облачными вычислениями) за десятилетия сделало роботов гораздо более полезными, чем раньше. В то время как каждый отдельный датчик в роботе будет иметь свою собственную петлю обратной связи в контроллере робота, комбинация разрозненных сенсорных систем («слияние датчиков») дает нам сложных роботов, которые лучше справляются с различными задачами.
Наиболее ярким примером слияния датчиков сейчас, вероятно, является область автономных транспортных средств. Хотя представление о том, что автомобиль ведет себя сам без участия человека, в настоящее время непрактично, мы движемся в этом направлении, объединяя мощные компьютеры с сенсорными системами, такими как лидар, радар, 2D- и 3D-камеры, акселерометры, гироскопы и многое другое.
