Какие бывают датчики скорости в современных автомобилях. Как устроены и работают основные типы датчиков скорости. Где располагается датчик скорости в автомобиле. Как проверить и заменить неисправный датчик скорости. Как продлить срок службы датчика скорости.
Назначение и виды датчиков скорости в автомобиле
Датчик скорости (ДС) является важным элементом современного автомобиля, отвечающим за измерение скорости движения и передачу этих данных в электронный блок управления (ЭБУ). На основе полученной информации ЭБУ корректирует различные параметры работы двигателя.
Основные функции датчика скорости:
- Измерение текущей скорости движения автомобиля
- Передача данных о скорости в ЭБУ
- Обеспечение работы спидометра
- Участие в управлении впрыском топлива и зажиганием
- Обеспечение работы круиз-контроля
- Участие в работе антиблокировочной системы (ABS)
По принципу действия выделяют следующие основные виды датчиков скорости:
- Индуктивные
- Герконовые (язычковые)
- На эффекте Холла (электронные)
Устройство и принцип работы индуктивного датчика скорости
Индуктивный датчик скорости состоит из следующих основных элементов:
- Постоянный магнит
- Обмотка из медного провода
- Сердечник из магнитомягкого материала
- Измерительный зубчатый диск на валу КПП
Принцип работы индуктивного ДС основан на явлении электромагнитной индукции. При вращении зубчатого диска происходит периодическое изменение магнитного поля вблизи датчика. Это вызывает возникновение переменного электрического тока в обмотке датчика. Частота и амплитуда этого тока пропорциональны скорости вращения диска, а значит и скорости движения автомобиля.
Устройство и принцип работы герконового датчика скорости
Герконовый (язычковый) датчик скорости включает следующие компоненты:
- Геркон – герметичный контакт в стеклянной колбе
- Постоянный магнит
- Измерительный диск с прорезями на валу КПП
При вращении диска с прорезями магнитное поле вблизи геркона периодически изменяется. Это вызывает замыкание и размыкание контактов геркона. Частота этих импульсов пропорциональна скорости вращения диска и движения автомобиля.
Устройство и принцип работы датчика скорости на эффекте Холла
Датчик скорости на эффекте Холла состоит из:

- Полупроводникового элемента Холла
- Постоянного магнита
- Измерительного диска с прорезями
- Электронной схемы обработки сигнала
Принцип действия основан на эффекте Холла – возникновении разности потенциалов в полупроводнике под действием магнитного поля. При вращении диска с прорезями магнитное поле вблизи элемента Холла периодически изменяется. Это вызывает формирование последовательности электрических импульсов, частота которых пропорциональна скорости.
Расположение датчика скорости в автомобиле
Датчик скорости автомобиля обычно располагается в следующих местах:
- На корпусе коробки передач — для механических КПП
- В гидротрансформаторе — для автоматических КПП
- На ведущем мосту — для некоторых моделей
- На одном из колес — для систем ABS
Чтобы найти датчик скорости, нужно осмотреть верхнюю часть коробки передач и найти разъем с проводами, выходящими из корпуса КПП. Важно не перепутать его с другими датчиками, например датчиком включения заднего хода.
Признаки неисправности датчика скорости
Основные симптомы, указывающие на проблемы с датчиком скорости автомобиля:
- Неверные показания спидометра
- Нестабильная работа двигателя на холостом ходу
- Рывки при разгоне и торможении
- Повышенный расход топлива
- Двигатель не развивает полную мощность
- Загорается индикатор Check Engine
- Некорректная работа круиз-контроля
При появлении таких признаков рекомендуется провести диагностику и при необходимости заменить датчик скорости. Игнорирование неисправности может привести к более серьезным поломкам.
Методы проверки исправности датчика скорости
Существует несколько способов самостоятельно проверить работоспособность датчика скорости:
- С помощью вольтметра:
- Снять датчик
- Подключить контакты вольтметра к клеммам датчика
- Вращать вал датчика
- Исправный датчик должен выдавать напряжение 0,5-10В
- С использованием диагностического тестера:
- Подключить сканер к диагностическому разъему
- Считать показания скорости при движении автомобиля
- Сравнить со спидометром
- Визуальный осмотр:
- Проверить целостность проводки и разъема
- Осмотреть датчик на наличие повреждений
- Убедиться в надежности крепления
При отсутствии сигнала или больших расхождениях в показаниях датчик необходимо заменить.

Порядок замены неисправного датчика скорости
Процедура замены датчика скорости включает следующие этапы:
- Отключить аккумулятор
- Найти расположение датчика на КПП
- Отсоединить электрический разъем
- Выкрутить крепежный болт
- Извлечь старый датчик
- Установить новый датчик
- Закрепить болтом
- Подключить разъем
- Подключить аккумулятор
- Проверить работу датчика
После установки нового датчика рекомендуется провести сброс ошибок ЭБУ с помощью диагностического сканера.
Рекомендации по продлению срока службы датчика скорости
Чтобы датчик скорости служил дольше, следует соблюдать несколько простых правил:
- Избегать езды на высоких скоростях — это снижает нагрузку на датчик
- Регулярно проверять состояние проводки и разъемов
- Своевременно менять масло в КПП
- Не допускать попадания влаги на датчик
- Периодически очищать датчик от загрязнений
- При замене использовать качественные оригинальные детали
Соблюдение этих рекомендаций поможет существенно продлить срок службы датчика скорости и избежать преждевременных поломок.

2.1 Назначение датчиков скорости
СОДЕРЖАНИЕ
2.1 Назначение датчиков скорости
2.2 Схема датчиков скорости
2.3 Классификация датчиков скорости
К общепромышленным приборам для измерения параметров движения относятся датчики скорости, применяемые при исследованиях, испытаниях и эксплуатации механизмов машин и сооружений.
Система, предназначенная для сушки твердых сыпучих материалов, предусматривает наличие датчика скорости для определения вращения барабана. Так как подача пара в барабан регулируется в зависимости от измеряемой влажности выходного продукта и зависит от производительности сушилки при различных скоростях барабана; скорость испарения на барабане также зависит от скорости самого барабана.
Основываясь на
выше перечисленном, данный датчик
скорости по функциональным
особенностям структуре относится к
электрической ветви государственной
системы приборов (ГСП).
При рассмотрении датчиков для измерения скорости необходимо различать датчики линейной скорости и датчики угловой. Но так как основной задачей датчика скорости нашей системы является определение скорости вращения барабана, то мы будем рассматривать датчики угловой скорости (тахометры).
Тахометр – это устройство, предназначенное для измерения частоты вращения, подсчета числа оборотов за заданный промежуток времени.
2.3 Классификация датчиков скорости
В зависимости от вида движения объекта различают:— датчики линейной скорости;
— датчики угловой скорости.
2.3.1 Датчики линейной скорости
Приборы для измерения скорости могут быть основаны на преобразовании поступательной скорости в угловую и на использовании явления магнитной индукции. Таким образом, по принципу действия датчики линейной скорости можно классифицировать следующим образом:
— индукционный датчик скорости при малых перемещениях;
— индукционный датчик скорости при больших перемещениях;
— тахогенераторы.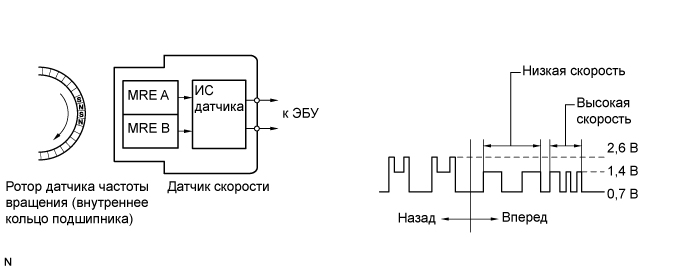
Индукционный датчик скорости при малых перемещениях (рис.1) состоит из цилиндрического пустотелого магнита, неподвижно укрепленного в основании и снабженного торцовыми башмаками в форме шайб, сквозь центральные отверстия которых проходит сердечник, несущий две катушки. Сердечник перемещается в цилиндрических направляющих. Возможно также применение направляющих без зазоров и трения — на плоских пружинах. Катушки соединены последовательно таким образом, чтобы их э.д.с., возникающие при перемещениях, суммировались.
Рисунок 1: 1-постоянный магнит; 2-полюсной башмак;
3-сердечники с обмоткой.
Допустимый ход сердечника при измерении и требуемая длина намотки катушек определяются размерами магнита.
Благодаря
высокой чувствительности датчика
измерение возможно без применения
усилителей. При чувствительности шлейфа
0,07
ма/мм
отклонение
на записи при измеряемой
скорости 1 см/сек
достигает
12 мм.
Индуктивный датчик скорости при больших перемещениях (рис.2). Перемещение детали, скорость которой измеряется, сообщается постоянному подковообразному магниту, между полюсами которого на двух параллельных сердечниках, набранных из тонких полосок трансформаторного железа, уложена плотно, виток к витку, однослойная обмотка из медного эмалированного провода диаметром 0,2 мм.
Рисунок 2: 1-постоянный магнит; 2-полюсной башмак;
3-сердечники с обмоткой.
Постоянство расстояния обмотки до полюсов магнита при движении достигается с помощью немагнитной вставки из эбонита или текстолита, которая прикреплена к магниту и скользит по обмотке.
Для защиты от перетирания на обмотку кладется копировальная бумага и надевается виниловый чулок.
Длина
обмотки должна быть на 15—20 см
больше
хода магнита. Характеристика датчика
линейная.
Тахогенератор преобразует поступательную скорость в угловую, шкала которого проградуирована в единицах поступательной скорости.
виды, устройство и принцип работы
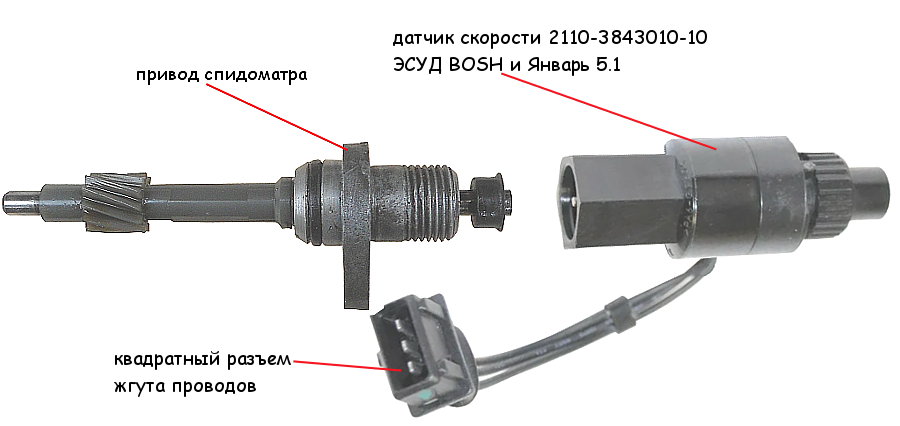
Датчик скорости автомобиля
Все современные автомобили оснащаются датчиком скорости. Его задача – замер скорости и передача полученной информации на электронный блок управления. Благодаря полученным с датчика сигналам корректируются параметры, влияющие на работу двигателя (количество подаваемого воздуха, обороты холостого хода и др.) Чем выше скорость движения – тем больше частота сигналов.
Устройство и принцип работы
Устройство ДС основано на эффекте Холла, устройство через определенные промежутки времени передает на ЭБУ частотно-импульсные сигналы. Так, за один километр пути, данное устройство передает около 6000 сигналов и на основании полученных данных блок управления в автоматическом режиме вычисляет скорость передвижения автомобиля. Чем выше скорость авто, тем с большей интенсивностью импульсы поступают на контроллер.
Чем выше скорость авто, тем с большей интенсивностью импульсы поступают на контроллер.
Кроме определения скорости этот прибор выполняет еще одну важную функцию. Когда автомобиль «катится» накатом, импульсный датчик не блокирует поступление топлива, тем самым способствуя экономии. Принцип работы ДС довольно прост, но, если возникают какие-либо неисправности, это сказывается на работе силового агрегата.
Сегодня принято выделять несколько видов ДСА, различающихся по устройству: индуктивные, язычковые и основанные на эффекте Холла (электронные датчики).
Где находится датчик скорости
Обычно датчик скорости автомобиля находится в верхней части МКПП: на механизме привода спидометра. Открыв капот его можно легко найти, для этого нужно искать разъем с исходящими от коробки передач проводами (важно не путать датчик скорости с установленным датчиком на раздаточную коробку или колеса).
Основные причины неисправности
Поломку датчика скорости стоит устранять своевременно, пока она не переросла в дорогостоящий ремонт. Для этого каждый автовладелец должен следить за тем, как его транспортное средство ведет себя во время движения. При малейших отклонениях от установленной нормы рекомендуется осуществить замену ДСА.
Для этого каждый автовладелец должен следить за тем, как его транспортное средство ведет себя во время движения. При малейших отклонениях от установленной нормы рекомендуется осуществить замену ДСА.
Основные признаки неисправности датчика скорости:
- повышается расход топлива;
- неверные показатели спидометра;
- на холостом ходу двигатель нестабильно работает;
- мотор не развивает полную мощность.
Также признаки выхода из строя датчика скорости могут проявляться в ситуациях, когда на холостом ходу, во время выжимания сцепления или во время переключения передач двигатель перестает работать. В таком случае водитель увидит индикатор с надписью «Check engine», если есть компьютер, на дисплее высвечивается ошибка «24».
В данной ситуации первым делом рекомендуется проверить состояние контактов и проводов, возможно, обнаружится обрыв в цепи. Как правило, это возникает рядом с разъемом, где находится изгиб, и провода могут перетереться. Если же контакты просто загрязнились или окислились, их необходимо зачистить.
Если же контакты просто загрязнились или окислились, их необходимо зачистить.
Также нужно контролировать целостность изоляции проводов в месте выпускного коллектора. Неисправность датчика может быть обусловлена выходом из строя тросика спидометра, который истерся в процессе эксплуатации.
Самостоятельное тестирование
Каждый владелец автомобиля должен знать, как проверить датчик скорости. Есть три возможных способа установить его исправность. Перед началом диагностики следует определить, выдает ли датчик 12 В, поскольку основной принцип работы ДВС основан на эффекте Холла, состояние контактов осуществляется исключительно при вращении. Показатели напряжения датчика в рабочем состоянии должны находиться в пределах 0,5-10 В.
1. Проверка вольтметром. ДСА нужно снять и установит, за что отвечает каждая клемма. Один контакт вольтметра следует присоединить к клемме, выводящей импульсные сигналы, а второй — подвести к проводу заземления. Датчик необходимо вращать и в это время смотреть на показатели напряжения.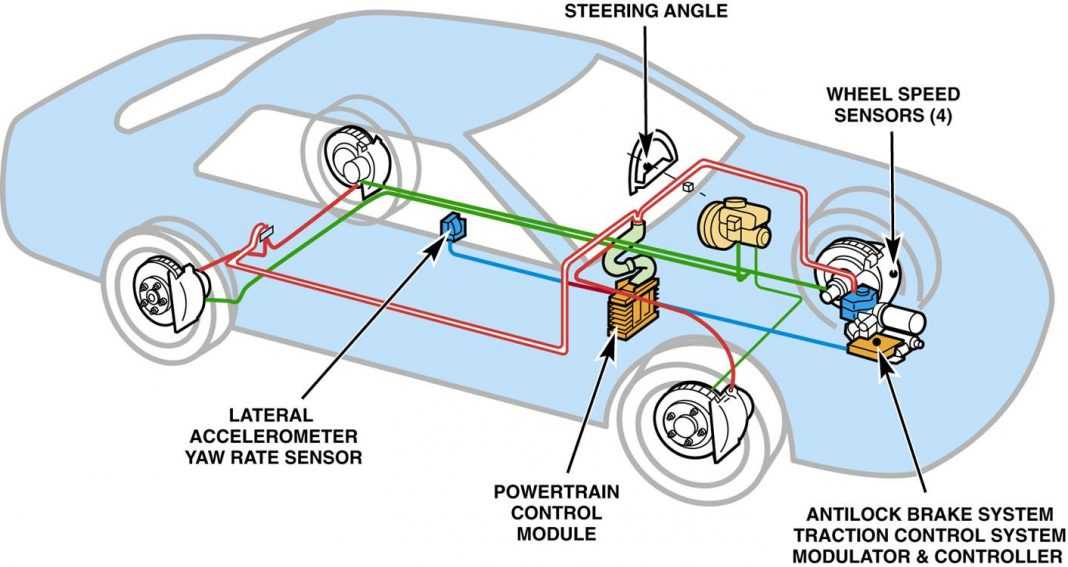 Чем интенсивнее вращается датчик, тем больше будут показатели.
Чем интенсивнее вращается датчик, тем больше будут показатели.
2. Необходимо отсоединить импульсный провод, который определяется специальным контроллером, и поднять колесо для вращения домкратом, чтобы оно не касалось земли. Присоединить контрольный провод «Сигнал», если показатель «-«, тогда датчик скорости исправен. Заменить контрольку в данном способе может провод с лампочкой.
3. Чтобы определить работу датчика, не обязательно снимать его с машины, для этого можно приподнять ее, как в предыдущем способе. Далее вольтметр соединить с контактами датчика, прибор при вращении колеса покажет показатели напряжения. Если вольтметр показывает напряжение и частоту в Гц, это указывает на то, что ДС работает.
Как заменить датчик скорости
Замены датчика скорости – это достаточно простая процедура, которая не займет много времени, поэтому многие водители проводят ее самостоятельно.
Чтобы заменить самостоятельно датчик скорости, необходимо следовать алгоритму процедуры:
Аккумуляторную батарею нужно отсоединить от бортовой сетки и только после этого отсоединить ДС. При этом рекомендуется в работе использовать два ключа – на «10» и на «21». В некоторых случаях понадобятся ключи другого размера, в зависимости от марки автомобиля.
При этом рекомендуется в работе использовать два ключа – на «10» и на «21». В некоторых случаях понадобятся ключи другого размера, в зависимости от марки автомобиля.
Необходимо максимально аккуратно (чтобы не повредить шток) открутить сам датчик. В случае если он не подлежит ремонту, нужно приобрести идентичный с равным количеством зубцов на шестерне.
Установка нового элемента происходит в обратном порядке. Шток устанавливается во втулку датчика, после – уплотнительное кольцо, предварительно обработанное маслом, а датчик скорости фиксируется на место.
После монтажа нового прибора следует обнулить ошибки ЭБУ, в ином случае машина не будет считать замену датчика результативной.
На что обратить внимание
Перед началом процедуры по замене датчика скорости нужно отключить зажигание, поскольку наличие в цепи напряжения при подключении вольтметра может привести к замыканию и выходу из строя остальных элементов.
Для того чтобы при снятии датчика скорости не столкнуться с дефектами штока, необходимо осуществить демонтаж привода спидометра.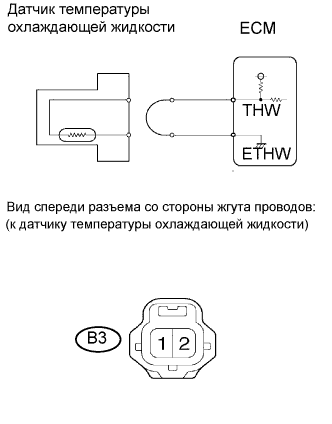 Для его снятия используется обычный гаечный ключ. Процедуру следует проводить очень аккуратно, доставая привод из корпусной части коробки передач, при этом важно не упустить шток в месте МКПП.
Для его снятия используется обычный гаечный ключ. Процедуру следует проводить очень аккуратно, доставая привод из корпусной части коробки передач, при этом важно не упустить шток в месте МКПП.
Как продлить срок службы ДС
Устройство ДС не отличается особой сложностью, а его замену может самостоятельно произвести практически каждый автовладелец. Поэтому многие не уделяют этому устройству должного внимания, что в некоторой степени способствует его неисправности. В большей степени рискуют водители, которые практикуют езду на высоких скоростях, при этом установленный датчик скорости имеет пластиковый хвостовик, который при сильной вибрации быстро разбивается тросиком.
Нередко причиной неисправности может стать и сам тросик, поскольку он находится под воздействием факторов таких, как влага и реагенты, используемые для обработки дорог. Это разрушает его структуру: тросик теряет первоначальную эластичность, начинает трескаться и расслаиваться. Чтобы не допустить его преждевременного перетирания, нужно регулярно обрабатывать его любым машинным маслом, закачивая шприцом под оплетку.
Отдельное внимание стоит уделять хвостовику ДС в том месте, где соединяется сам датчик и трос. В случае если хвостовик пластиковый, он разбалтывается в ходе эксплуатации автомобиля, что приводит к тому, что его посадочное место становится разбитым. Это приводит к тому, что ДС выходит из строя, а хвостовик ремонту не подлежит. Как результат – придется менять все устройство.
Также следует знать, что контакты датчика скорости нуждаются в регулярной очистке, поскольку воздействие внешних факторов приводит к их окислению. Ухудшение проводимости напряжения может привести к возникновению замыкания, которое выведет прибор из строя.
Теперь каждый автовладелец может оценить значение датчика скорости в транспортном средстве, который помимо определения скорости также влияет на работу силового агрегата. Поэтому важно своевременно обнаружить и устранить неисправность, а при необходимости и прибегнуть к его замене. Прежде чем монтировать деталь необходимо использовать вышеуказанные методы тестирования для определения его работоспособности.
Если материал был для вас интересен или полезен, опубликуйте его на своей странице в социальной сети:
Добавить комментарий
В начало страницы
Системы датчиковМеггитт | Рекомендации по выбору датчика скорости и установке для обеспечения бесперебойной работы
Выбор правильного датчика для защиты от превышения скорости, индикации скорости и контроля скорости начинается с понимания измерений, понимания различных типов датчиков и понимания особенностей применения, которые могут влиять на измерение честность.
Превышение скорости:
Рассмотрим последствия «пропущенного» превышения скорости на большом паротурбинном генераторе. Менее чем за секунду машина может разогнаться до скоростей, при которых лопасти отрываются от ротора, пробивая корпус турбины и нанося огромный ущерб не только машине, но и окружающим конструкциям, оборудованию и персоналу. Рисунок 1 является отрезвляющим напоминанием о последствиях и требует небольшого уточнения 1,2,3
Управление:
Учитывайте также последствия ошибочных приложений управления скоростью. Одним из примеров является измерение «нулевой скорости», которое более подробно описано в нашей электронной книге по измерениям TSI. Здесь достаточно сказать, что он должен точно измерять очень малые скорости 4 , чтобы при достаточном замедлении ротора можно было включить поворотный механизм для предотвращения прогиба ротора. Включение поворотного механизма на неправильной скорости может привести к серьезному повреждению ротора и устройства поворотного механизма. Точно так же отказ от выключения поворотного механизма, когда турбина начинает разгон, также может привести к повреждению. Действительно, есть как экономические последствия, так и последствия для безопасности. Независимо от того, выполняется ли это вручную или автоматически, система, измеряющая скорость включения/выключения поворотного механизма, является серьезным делом.
Одним из примеров является измерение «нулевой скорости», которое более подробно описано в нашей электронной книге по измерениям TSI. Здесь достаточно сказать, что он должен точно измерять очень малые скорости 4 , чтобы при достаточном замедлении ротора можно было включить поворотный механизм для предотвращения прогиба ротора. Включение поворотного механизма на неправильной скорости может привести к серьезному повреждению ротора и устройства поворотного механизма. Точно так же отказ от выключения поворотного механизма, когда турбина начинает разгон, также может привести к повреждению. Действительно, есть как экономические последствия, так и последствия для безопасности. Независимо от того, выполняется ли это вручную или автоматически, система, измеряющая скорость включения/выключения поворотного механизма, является серьезным делом.
Управление регулятором, очевидно, также важно для возможности очень точного управления скоростью в различных приложениях, не последним из которых является производство электроэнергии при синхронизации скорости вращения генератора с сетью. Другим примером является правильная скорость разгона турбины при ее запуске, чтобы тепловое расширение могло происходить без трения. Эта тема также рассматривается в нашей электронной книге по измерениям TSI.
Другим примером является правильная скорость разгона турбины при ее запуске, чтобы тепловое расширение могло происходить без трения. Эта тема также рассматривается в нашей электронной книге по измерениям TSI.
Рис. 1: Последствия аварии из-за превышения скорости в феврале 2011 г. на энергоблоке № 4, одном из шести турбогенераторов мощностью 600 МВт на электростанции Дувха в Южной Африке 1,2,3 . Хотя установка рассчитана на работу на частоте 60 Гц (3600 об/мин), последняя зарегистрированная скорость до разрушения составляла 4250 об/мин (превышение скорости 18%). По иронии судьбы, сбой произошел во время тестирования системы отключения агрегата при превышении скорости.
Ползучесть:
В крупных гидроагрегатах так называемое «ползучесть» измерения 5 очень важно, поскольку оно должно определять, полностью ли остановился ротор, что позволяет персоналу безопасно обслуживать массивную машину без травм. или измельченный. Ползучесть возникает, когда утечка воды просачивается через турбину даже при полностью закрытых клапанах или заслонках, а тормозная система ротора недостаточно сильна, чтобы поддерживать полную остановку вала. Эта утечка медленно вращает машину, действуя как непреднамеренный гидравлический поворотный механизм. Скорости настолько малы (обычно 3 оборота в час — всего 0,05 об/мин), что обычное измерение скорости неадекватно. Например, использование опорного сигнала фазы приведет к тому, что каждые 20 минут будет поступать только один импульс — неприемлемо низкая скорость обновления, когда на карту поставлена безопасность человека. Существуют различные подходы к этому измерению. Некоторые используют шестерню с 360 зубьями на валу и обычный бесконтактный датчик, обеспечивающий один импульс на каждый градус оборота и частоту обновления около 10 секунд. Другие используют датчик воздушного зазора. Третьи используют механическое устройство, такое как маленькое колесо, которое контактирует с периферией вала и вращается быстрее, чем вал турбины, благодаря соотношению диаметров 9.
Ползучесть возникает, когда утечка воды просачивается через турбину даже при полностью закрытых клапанах или заслонках, а тормозная система ротора недостаточно сильна, чтобы поддерживать полную остановку вала. Эта утечка медленно вращает машину, действуя как непреднамеренный гидравлический поворотный механизм. Скорости настолько малы (обычно 3 оборота в час — всего 0,05 об/мин), что обычное измерение скорости неадекватно. Например, использование опорного сигнала фазы приведет к тому, что каждые 20 минут будет поступать только один импульс — неприемлемо низкая скорость обновления, когда на карту поставлена безопасность человека. Существуют различные подходы к этому измерению. Некоторые используют шестерню с 360 зубьями на валу и обычный бесконтактный датчик, обеспечивающий один импульс на каждый градус оборота и частоту обновления около 10 секунд. Другие используют датчик воздушного зазора. Третьи используют механическое устройство, такое как маленькое колесо, которое контактирует с периферией вала и вращается быстрее, чем вал турбины, благодаря соотношению диаметров 9. 0011 6 . В других подходах используется щетка, которая контактирует с валом. Когда вал вращается, щетка наклоняется и переключает микропереключатель, сигнализируя о проскальзывании. Независимо от используемого механизма достоверность измерения ползучести чрезвычайно важна, поскольку на карту поставлена безопасность обслуживающего персонала.
0011 6 . В других подходах используется щетка, которая контактирует с валом. Когда вал вращается, щетка наклоняется и переключает микропереключатель, сигнализируя о проскальзывании. Независимо от используемого механизма достоверность измерения ползучести чрезвычайно важна, поскольку на карту поставлена безопасность обслуживающего персонала.
Обратное вращение:
Другим важным измерением является обратное вращение, которое может иметь место, когда технологическая среда течет в обратном направлении через машину, заставляя ее вращаться в неправильном направлении. Это может происходить, например, с компрессорами, превращая компрессор в привод, а первичный двигатель — в ведомую машину. Для машин с сухим газовым уплотнением это может быть особенно разрушительным, поскольку они рассчитаны на вращение только в одном направлении и могут выдержать только определенное количество оборотов в обратном направлении, прежде чем произойдет повреждение и соответствующие уровни неприемлемой утечки уплотнения.
Рис. 2. Один из методов измерения обратного вращения — использование двух бесконтактных датчиков. На верхнем рисунке серый датчик наблюдает разрыв вала один раз за оборот перед зеленым датчиком, что указывает на вращение по часовой стрелке. На нижнем рисунке вращение происходит против часовой стрелки. и, таким образом, зеленый зонд наблюдает разрыв перед серым зондом. Возможны и другие схемы, например, использование датчиков Холла с двумя встроенными магнитами, которые позволяют определять направление вращения с помощью одного датчика.
Индикация:
Наконец, у нас есть индикация скорости, которая, как следует из названия, является индикацией скорости, а не используется в целях защиты или управления. Индикация скорости, хотя и важна, не имеет последствий для безопасности или экономики, связанных с этими другими измерениями скорости. Таким образом, избыточность датчиков и измерительных цепей, а также интервалы проверки не так важны.
По всем этим причинам важно понимать датчики, используемые для измерения скорости, и соображения по применению, которые отдают предпочтение одному типу перед другим. Также важно уделить должное внимание деталям в общей системе защиты от превышения скорости и полевой проводке, которые, если их не соблюдать, могут привести к уязвимости измерения, даже если был выбран правильный датчик.
Также важно уделить должное внимание деталям в общей системе защиты от превышения скорости и полевой проводке, которые, если их не соблюдать, могут привести к уязвимости измерения, даже если был выбран правильный датчик.
Типы датчиков скорости
Существует три основных типа датчиков скорости, используемых для измерений в промышленном оборудовании: вихретоковые бесконтактные, магнитные и датчики Холла. Хотя есть и другие, они составляют лишь очень небольшую часть установленной базы для измерения скорости турбомашин и поэтому здесь не обсуждаются.
Вихретоковые датчики приближения
Пользователи систем мониторинга вибрации, таких как VM600, знакомы с этими датчиками, поскольку они широко используются для измерения радиальной вибрации, осевого положения и эталонных измерений фазы.
Бесконтактные датчики являются хорошим выбором, когда необходимо выполнить точные фазовые измерения, например, угол поворота коленчатого вала в поршневых компрессорах (где часто присутствуют крутильные вибрации и неравномерная скорость по всему ходу) и на любой машине, где будет выполняться диагностика используя фазу. Для поршневых компрессоров часто используется прецизионное измерительное колесо, как подробно описано в приложении J API 670. ограниченное пространство, что может быть важно для машин с небольшим диаметром вала, таких как компрессоры-детандеры и компрессоры со встроенным редуктором и несколькими шестернями.
Для поршневых компрессоров часто используется прецизионное измерительное колесо, как подробно описано в приложении J API 670. ограниченное пространство, что может быть важно для машин с небольшим диаметром вала, таких как компрессоры-детандеры и компрессоры со встроенным редуктором и несколькими шестернями.
Подробнее об использовании бесконтактных датчиков для измерения скорости можно прочитать в статье нашего блога «Системы измерения приближения как датчики скорости».
Магнитные датчики
Они известны как датчики скорости, магнитные датчики, магнитные датчики (MPU), пассивные магнитные датчики и датчики переменного сопротивления (VR). Они, безусловно, являются наиболее распространенным типом датчиков скорости для управления регулятором и измерения превышения скорости. Однако они, как правило, не подходят для низкоскоростного оборудования, где требуются скорости вращения ниже 250 об/мин (если только для наблюдаемой поверхности не используется многозубчатое колесо). В отличие от бесконтактных датчиков Холла и вихретоковых датчиков, они не способны выполнять истинные измерения нулевой скорости. Кроме того, в отличие от датчиков приближения на основе эффекта Холла и вихревых токов, для них требуется железная цель.
В отличие от бесконтактных датчиков Холла и вихретоковых датчиков, они не способны выполнять истинные измерения нулевой скорости. Кроме того, в отличие от датчиков приближения на основе эффекта Холла и вихревых токов, для них требуется железная цель.
MPU используют катушку, окружающую магнит, и измеряют изменение магнитного потока, вызванное неоднородностями поверхности объекта (например, зубья шестерни, проходящие под датчиком). Таким образом, им требуется цель из железа. Выходной сигнал MPU представляет собой синусоидальный сигнал, амплитуда которого зависит от расстояния (промежутка), размера цели и скорости. Это может быть нежелательно как на очень высоких, так и на очень низких скоростях. На высоких скоростях напряжения могут быть большими, превышая 60 В переменного тока, и намного превышать типичные измерительные напряжения 24 В или меньше. Напротив, на низких скоростях напряжения обычно слишком малы, чтобы их можно было использовать без дополнительного усиления. Обычно это ограничивает пассивные микропроцессоры измерениями выше 250 об/мин.
Обычно это ограничивает пассивные микропроцессоры измерениями выше 250 об/мин.
Типовой размер, используемый во многих турбинах, составляет 5/8-18 UNF-2A или M16, но доступны меньшие размеры до ¼-28 UNF-2A или M12-1,25.
Поскольку датчики являются самогенерирующими и не требуют внешнего питания, многие производители турбин стандартизировали их и не снабдили свои соответствующие системы управления/контроля/защиты возможностью питания датчика скорости. Это означает, что другие типы датчиков не могут быть легко заменены без модернизации системы управления/контроля/защиты. Следовательно, большинство пользователей заменяют свои микропроцессоры аналогичным продуктом, а не переключаются на датчик Холла или вихретоковый датчик.
К популярным производителям микропроцессоров относятся Dynalco (Barksdale), Magnetic Sensors Corporation, HarcoSemco и Motion Sensors Inc. Однако существует множество других, и это лишь неполный список.
Активные (т. е. с внешним питанием) MPU также доступны, которые могут обеспечивать цифровой выход (т. е. прямоугольную последовательность импульсов) вместо синусоидального выходного сигнала, который изменяется по амплитуде, а не только по частоте. Хотя активные микропроцессоры могут лучше справляться с низкоскоростными измерениями (примерно до 2 Гц), они по-прежнему не способны выполнять настоящие измерения нулевой скорости.
е. прямоугольную последовательность импульсов) вместо синусоидального выходного сигнала, который изменяется по амплитуде, а не только по частоте. Хотя активные микропроцессоры могут лучше справляться с низкоскоростными измерениями (примерно до 2 Гц), они по-прежнему не способны выполнять настоящие измерения нулевой скорости.
Подробнее о принципах работы микропроцессоров можно прочитать в официальном документе 7 , опубликованном HarcoSemco, который можно загрузить здесь.
Датчики на эффекте Холла:
Как и в микропроцессоре, в датчиках на эффекте Холла также используется встроенный магнит, поэтому для них требуется металлическая мишень. Хотя датчики обоих типов измеряют магнитный поток, датчик Холла чувствителен только к величине магнитного потока, а не к скорости его изменения. Следовательно, амплитуда выходного сигнала не меняется со скоростью — меняется только частота. Однако, поскольку датчики на эффекте Холла, в отличие от бесконтактных датчиков и микропроцессоров, имеют встроенную электронику вместо относительно простых компонентов, таких как магнит и/или катушка с проводом, они ограничены средами с температурой ниже примерно 150° C.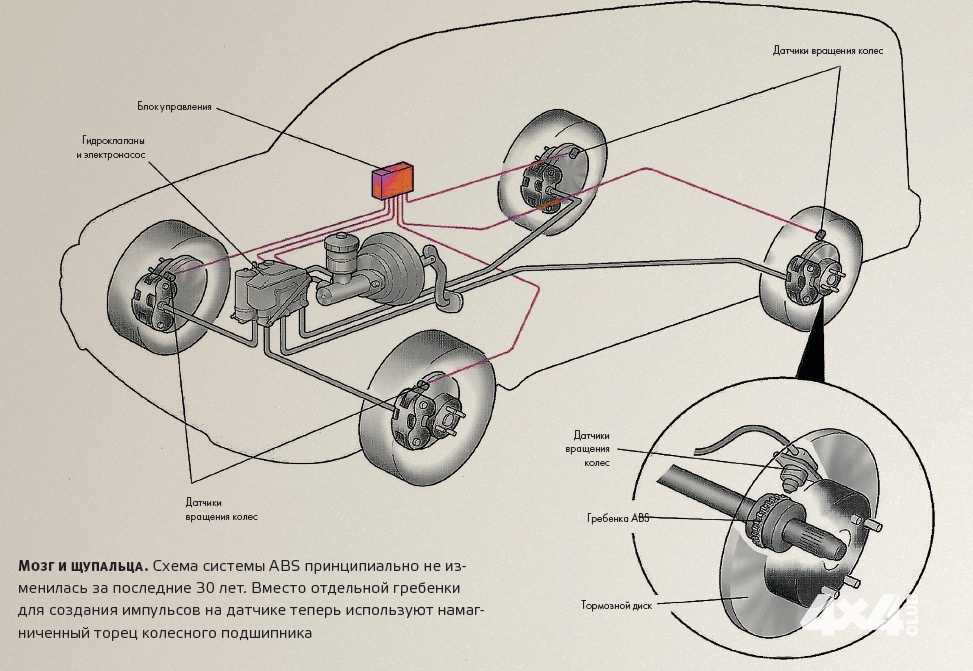 Хотя у технологии есть преимущества. и достаточно надежен, в промышленных турбомашинах используется не так много датчиков Холла, как MPU или вихретоковые бесконтактные датчики.
Хотя у технологии есть преимущества. и достаточно надежен, в промышленных турбомашинах используется не так много датчиков Холла, как MPU или вихретоковые бесконтактные датчики.
Подробнее о принципах работы датчиков Холла можно прочитать в официальном документе 8 , опубликованном Honeywell, который можно скачать здесь.
Чувствительные поверхности
Хотя разрыв один раз за оборот используется для эталонных измерений фазы и подходит для большинства приложений, предназначенных только для индикации скорости, он категорически не подходит для измерения превышения скорости. Если учесть, что API 670 требует, чтобы система защиты от превышения скорости действовала в течение 40 мс после обнаружения события превышения скорости, обновление сигнала скорости один раз за оборот требует слишком много времени для обновления. Рассмотрим машину со скоростью вращения 3000 об/мин (50 Гц). Для одного оборота вала требуется 20 мс. Если бы нам потребовались хотя бы два последовательных измерения для обнаружения увеличения скорости, само по себе это заняло бы почти 40 мс.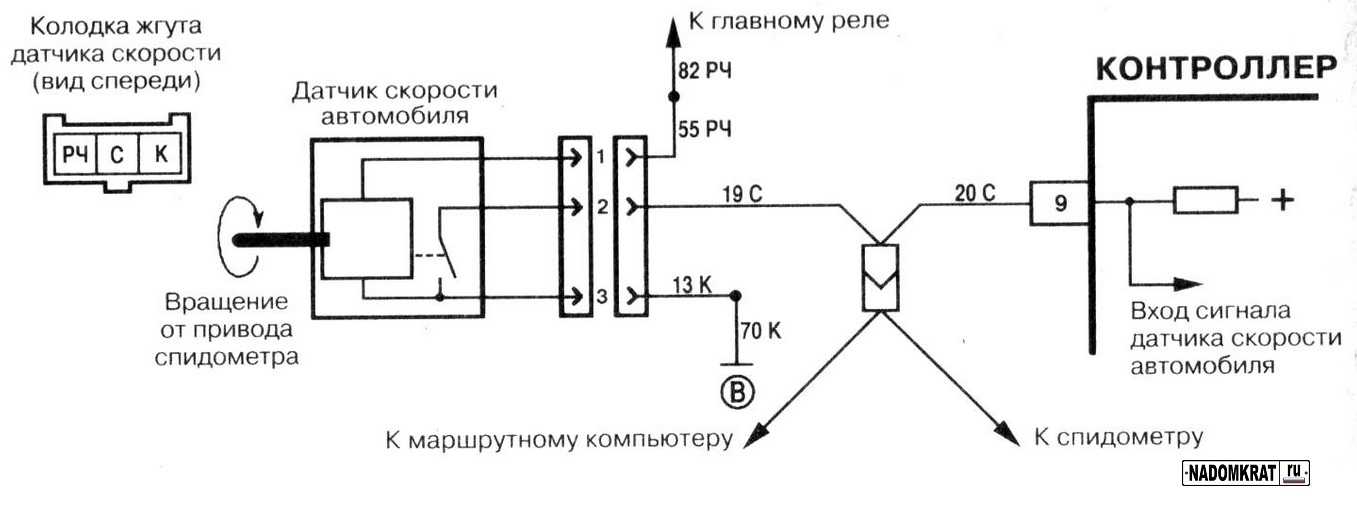 Для более медленных машин ситуация становится еще более неблагоприятной. По этой причине принято использовать зубчатое колесо, чтобы изменения скорости можно было обнаружить как можно быстрее — как правило, всего за долю полного оборота вала.
Для более медленных машин ситуация становится еще более неблагоприятной. По этой причине принято использовать зубчатое колесо, чтобы изменения скорости можно было обнаружить как можно быстрее — как правило, всего за долю полного оборота вала.
В некоторых случаях используется специально изготовленная шестерня, разработанная и оптимизированная специально для измерения скорости. В других случаях используется существующая передача. Профиль шестерни важен, особенно для микропроцессоров. API 670 предоставляет руководство по этому вопросу в Приложении J 9 , где указаны минимальные, номинальные и максимальные размеры как для точных колес с датчиками скорости (рис. 3), так и для неточных (т. е. зубчатых) колес с датчиками скорости (рис. 4). Из-за ограничений авторского права сами рисунки воспроизведены здесь с разрешения, но необходимо приобрести копию стандарта API 670 10 для доступа к фактическим минимальным, номинальным и максимальным рекомендациям для этих размеров.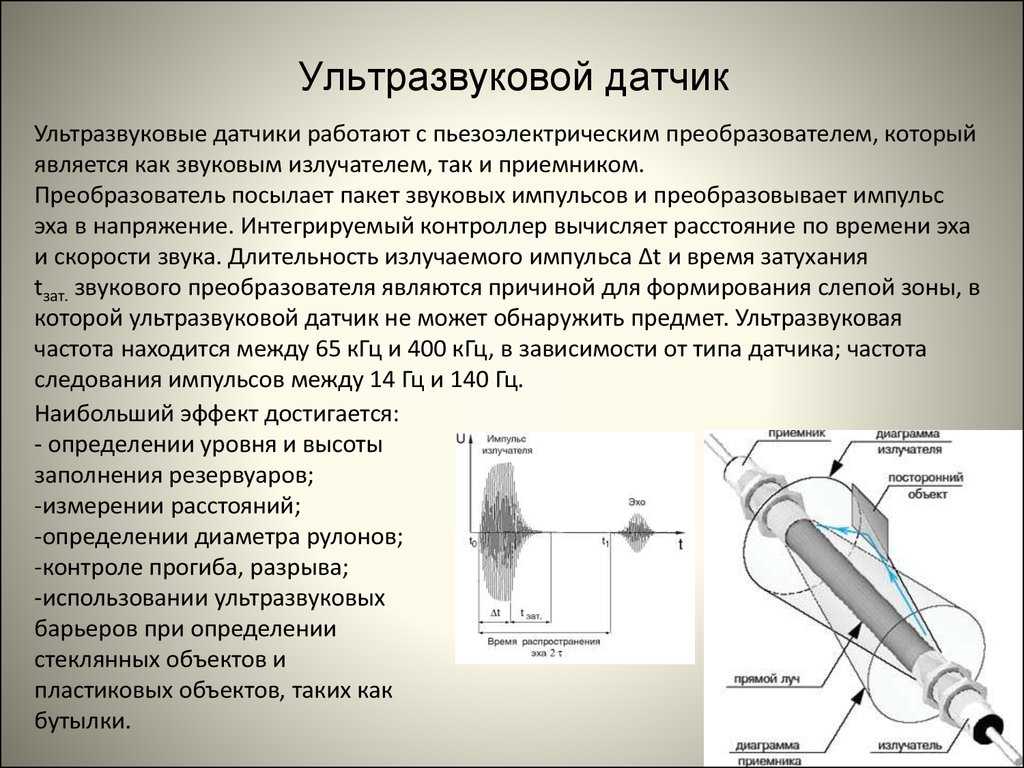
Рис. 3: Соответствующие размеры поверхностей для точного измерения скорости. Рисунок 4
Распространенные ошибки
Рис. 5. Если ротор увеличивается на величину Δ, необходимо следить за тем, чтобы это не привело к тому, что целевая поверхность сместится за пределы наблюдаемого поля датчика.
- Чрезмерное тепловое расширение ротора на чувствительной поверхности — Расположение поверхности измерения скорости должно учитывать тепловое расширение вала, которое может быть особенно заметно на больших машинах, таких как паровые турбины-генераторы. Если вал значительно увеличивается или сужается в месте измерения, чувствительная поверхность может выйти за пределы наблюдаемого поля датчика, что приведет к ошибочному измерению. См. рис. 5.
- Чрезмерная длина полевой проводки — Когда длина полевой проводки превышает несколько сотен метров, может стать ощутимым распределенный импеданс.
 Затем провод действует как фильтр нижних частот, ослабляя высокочастотные сигналы. Необходимо соблюдать осторожность, чтобы понять и учесть эти эффекты или использовать датчик, который менее подвержен таким проблемам, например, бесконтактные датчики семейства TQ виброметра, и выбрать вариант динамического вывода тока, а не параметр вывода динамического напряжения.
Затем провод действует как фильтр нижних частот, ослабляя высокочастотные сигналы. Необходимо соблюдать осторожность, чтобы понять и учесть эти эффекты или использовать датчик, который менее подвержен таким проблемам, например, бесконтактные датчики семейства TQ виброметра, и выбрать вариант динамического вывода тока, а не параметр вывода динамического напряжения. - Неправильный зазор датчика — Датчики с неправильным зазором могут либо тереться и полностью разрушаться при сильной вибрации наблюдаемой поверхности, либо давать ошибочные показания. MPU дают уменьшенную амплитуду с увеличением зазора. Одним из преимуществ активного датчика является то, что он может обеспечить более надежные проверки OK, чем беспристрастный датчик, такой как MPU. Бесконтактный датчик обычно имеет смещение примерно -10 В при питании от обычного источника питания -24 В постоянного тока. Очень часто зубчатое колесо демонстрирует больший эксцентриситет (амплитуды радиальных колебаний) во время превышения скорости и протирает кончик датчика.
 Даже если используются резервные датчики (что очень распространено при измерении превышения скорости), все датчики могут быть стерты в течение одного оборота вала, если они не установлены должным образом, что делает систему превышения скорости неработоспособной. Это одна из причин, по которой система контроля превышения скорости воспринимает неисправность датчика как указание на отключение. Именно поэтому отдельные датчики и даже отдельные чувствительные поверхности используются для управления регулятором, а не для защиты от превышения скорости.
Даже если используются резервные датчики (что очень распространено при измерении превышения скорости), все датчики могут быть стерты в течение одного оборота вала, если они не установлены должным образом, что делает систему превышения скорости неработоспособной. Это одна из причин, по которой система контроля превышения скорости воспринимает неисправность датчика как указание на отключение. Именно поэтому отдельные датчики и даже отдельные чувствительные поверхности используются для управления регулятором, а не для защиты от превышения скорости. - Неправильные настройки триггера — Для бесконтактных датчиков и MPU выходной сигнал является синусоидальным и, таким образом, представляет собой совокупность изменения зазора из-за вибрации и изменения зазора из-за разрывов в мишени (например, зубьев шестерни). Существует много факторов, которые могут сочетаться друг с другом, чтобы давать другой сигнал на рабочих скоростях, чем на медленных скоростях, и важно установить уровни срабатывания, которые отражают рабочие скорости, а не просто скорости медленных валков.
 Настоятельно рекомендуется подключить осциллограф к выходу датчика скорости, чтобы наблюдать фактическую форму сигнала на рабочих скоростях и соответствующим образом устанавливать пороги срабатывания. На рис. 6 показано, что может произойти, если синхронизация настроена путем наблюдения только за медленным сигналом, что приводит к ошибочным показаниям (занижению счета) на рабочих скоростях. Причина, по которой сигнал при низкой скорости вращения может иметь большую амплитуду, чем при рабочей скорости, связана с многочисленными факторами, включая скорость нарастания преобразователя, частотную характеристику и влияние амплитуды и фазы вибрации в месте измерения.
Настоятельно рекомендуется подключить осциллограф к выходу датчика скорости, чтобы наблюдать фактическую форму сигнала на рабочих скоростях и соответствующим образом устанавливать пороги срабатывания. На рис. 6 показано, что может произойти, если синхронизация настроена путем наблюдения только за медленным сигналом, что приводит к ошибочным показаниям (занижению счета) на рабочих скоростях. Причина, по которой сигнал при низкой скорости вращения может иметь большую амплитуду, чем при рабочей скорости, связана с многочисленными факторами, включая скорость нарастания преобразователя, частотную характеристику и влияние амплитуды и фазы вибрации в месте измерения.
Рис. 6: Пример неправильного уровня срабатывания V T от бесконтактного датчика. Хотя он приемлемо работает на медленных скоростях вращения (вверху), он не работает приемлемо на рабочих скоростях (внизу), когда распознается только один из четырех импульсов, что приводит к ошибочным показаниям скорости.
 Недосчет фактических зубьев шестерни приведет к пропущенному отключению из-за системы превышения скорости. И наоборот, пересчет зубьев шестерни приведет к ложному срабатыванию.
Недосчет фактических зубьев шестерни приведет к пропущенному отключению из-за системы превышения скорости. И наоборот, пересчет зубьев шестерни приведет к ложному срабатыванию. Неправильный профиль поверхности
Как уже отмечалось и как показано на рисунках 3 и 4 в сочетании с API 670, необходимо тщательно соблюдать размеры наблюдаемого профиля поверхности. На рис. 7 показан пример выходных данных MPU, в котором эти соображения не были соблюдены, что привело к так называемому «множественному пересечению нуля» и ошибочному показанию скорости.
Рис. 7. Пример MPU, наблюдающего правильную поверхность (вверху) и неправильную поверхность (внизу). Неправильная поверхность может привести к многократным положительным пересечениям нуля и, следовательно, к ошибочным показаниям. Самогенерирующая природа MPU создает форму волны переменного тока с центром в 0 В (т. Е. Он не имеет напряжения смещения).
Это ни в коем случае не единственные потенциальные ловушки при измерении скорости — это лишь пять из наиболее часто встречающихся. Обратитесь к специалисту по обслуживанию виброметров за дополнительными указаниями и помощью в установке.
Обратитесь к специалисту по обслуживанию виброметров за дополнительными указаниями и помощью в установке.
Резюме
В то время как вибрация, осевое положение и другие измерения используются для целей защиты оборудования, никакое измерение не превосходит измерение скорости по своей важности и потенциальному риску катастрофического отказа оборудования, если оно не выполняется должным образом. Хотя выбор преобразователя важен, его установка не менее важна, а также внимание к наблюдаемой чувствительной поверхности. Даже самый эффективный прибор для обнаружения превышения скорости в сочетании с правильными датчиками будет неэффективным, если описанные здесь подводные камни при установке, а также другие, которые могут быть выявлены вашим специалистом по обслуживанию виброметров, не будут распознаны и устранены.
Примечания
1 Габара, Н., « Ремонт станции Дувха компании Eskom потребует времени», S Агентство правительственных новостей Южной Африки https://www. sanews.gov.za/south-africa/repairs- eskoms-duvha-station-take-time (10 февраля 2011 г.)
sanews.gov.za/south-africa/repairs- eskoms-duvha-station-take-time (10 февраля 2011 г.)
2 Вся коллекция изображений доступна по адресу http://www.tathasta.com/2018/03/duvha-south-africa-turbine- overspeed.html
3 Стратон, А., « Электростанция Дувха – упражнение в недоверии », www.MyPE.co.za, https://mype.co.za/new/duvha-power-station-an-exercise-in-incredulity/3439/2011/03/ (26 марта 2011 г.)
4 Поворотные механизмы обычно работают со скоростью 3 об/мин или менее.
5 Не путать с ползучестью лопастей газовых и паровых турбин, которая представляет собой постепенную деформацию (удлинение) лопастей из-за больших центробежных сил, возникающих с течением времени при высокоскоростном вращении лопастей. Такая ползучесть обычно описывается в микродюймах на рабочий час.
6 Например, вал турбины диаметром 1 м, контактирующий с колесом диаметром 5 см, заставит колесо вращаться в 20 раз быстрее, чем вал турбины. Для турбины, вращающейся со скоростью 3 оборота в час, это означает, что измерительное колесо вращается со скоростью 1 об/мин.
Для турбины, вращающейся со скоростью 3 оборота в час, это означает, что измерительное колесо вращается со скоростью 1 об/мин.
7 Кроче Р.А., Гитерман И., « Разработка электрической и магнитной модели датчиков скорости с переменным магнитным сопротивлением », информационный документ, ноябрь 2016 г., Harco Laboratories, Brandord, CT.
8 « Датчики на эффекте Холла и применение », информационный документ, октябрь 1998 г., Honeywell MicroSwitch Sensing and Control, Фрипорт, Иллинойс.
9 API Std 670 — Приложение J, « Системы защиты машин — Рекомендации по электронной системе обнаружения превышения скорости, », 5-е издание, ноябрь 2014 г., Американский институт нефти, Вашингтон, округ Колумбия.
10 Стандарты API, технические отчеты, рекомендуемые практики и другие публикации можно приобрести на сайтах techstreet.com, IHSMarkit.com и у других авторизованных дистрибьюторов по всему миру (https://www. api.org/products-and-services). /standards/purchase#tab-authorized-standards-distributors).
api.org/products-and-services). /standards/purchase#tab-authorized-standards-distributors).
11 Эти цифры используются с разрешения Американского института нефти и приведены в приложении J стандарта API 670, Системы защиты машин , 5-е издание (ноябрь 2014 г.).
Хотите узнать больше об измерении превышения скорости? Загрузите нашу информативную новую публикацию под названием «Спидометр», чтобы ознакомиться с множеством познавательных статей, в которых рассказывается, почему и как измеряется превышение скорости в промышленных вращающихся машинах.
SpeedSys300 ODS301 — это новая современная система обнаружения и защиты от превышения скорости с классом SIL 3. Система имеет универсальную модульную архитектуру и отличается малозатратной модернизацией, что делает ее пригодной для любых приложений с критическими скоростями.
Вернуться к списку блогов
Узнать больше
Руководство по датчикам — Motion Sensors Inc.
Мы здесь, чтобы помочь вам выбрать правильное решение для измерения скорости.
 Motion Sensors предлагает полный спектр решений для стандартных скоростей. Наши стандартные датчики скорости и специалисты по применению, понимающие ваши требования, делают датчики движения вашим незаменимым помощником в измерении скорости.
Motion Sensors предлагает полный спектр решений для стандартных скоростей. Наши стандартные датчики скорости и специалисты по применению, понимающие ваши требования, делают датчики движения вашим незаменимым помощником в измерении скорости.
Тип выхода
Прежде всего необходимо решить, требуется ли цифровой или аналоговый сигнал. Базовый датчик скорости с переменным магнитным сопротивлением (VR) обеспечивает аналоговую синусоидальную волну. Частота сигнала будет увеличиваться по мере увеличения скорости. Если требуется цифровой выход, варианты могут включать усиленные версии датчиков скорости VR или RF, датчики на эффекте Холла или соединение предварительного усилителя со стандартным датчиком VR или RF. Существует множество вариантов выхода, в том числе 0–5 В постоянного тока, 0–10 В постоянного тока, открытый коллектор и выход, привязанный к источнику питания.
Минимальные требования к выходному сигналу, детализация цели и воздушный зазор
Выходной сигнал датчика скорости сильно зависит от деталей приложения, таких как размер, форма и материал цели.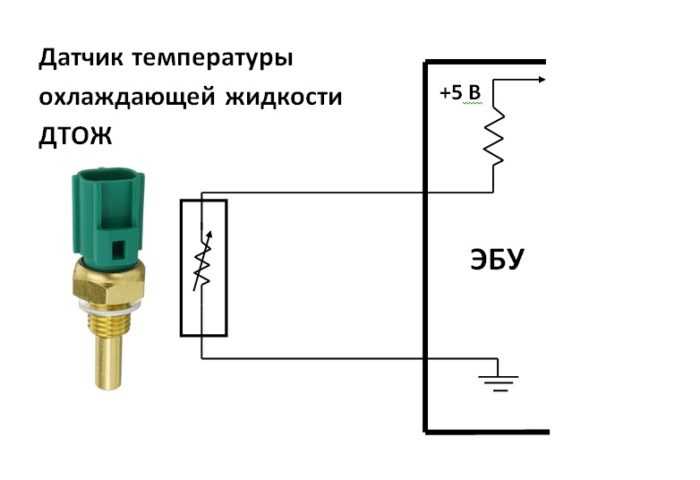 Типы целей значительно различаются, например, вращающиеся шестерни, лопасти турбины, винт, встроенный в вращающийся вал, или выемка из черного металла на конвейерной ленте. Мишени также могут иметь форму движущегося магнитного поля, например магниты с центральным полюсом или магниты, встроенные во внешний обод вращающегося устройства. В большинстве случаев требуется цель из черного металла, однако мы также можем предложить датчики с модулированной несущей (RF), которые способны обнаруживать определенные цветные металлы, такие как алюминий и немагнитная нержавеющая сталь.
Типы целей значительно различаются, например, вращающиеся шестерни, лопасти турбины, винт, встроенный в вращающийся вал, или выемка из черного металла на конвейерной ленте. Мишени также могут иметь форму движущегося магнитного поля, например магниты с центральным полюсом или магниты, встроенные во внешний обод вращающегося устройства. В большинстве случаев требуется цель из черного металла, однако мы также можем предложить датчики с модулированной несущей (RF), которые способны обнаруживать определенные цветные металлы, такие как алюминий и немагнитная нержавеющая сталь.
Во многих случаях, если выход датчика будет подключен к ПЛК или другому электронному устройству, датчик должен обеспечивать минимальный выходной сигнал. После того, как будут известны целевые детали, также будет важно определить воздушный зазор и минимальные/максимальные обороты в минуту приложения.
Воздушный зазор, определяемый как расстояние между наконечником датчика и целью, определяет мощность сигнала, подаваемого датчиком.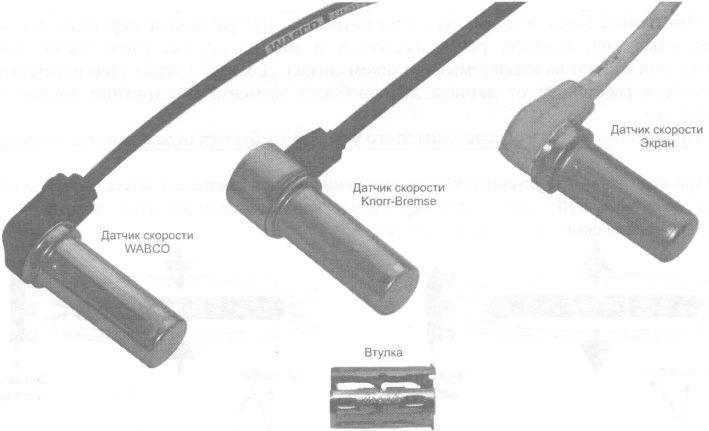 Чем ближе датчик установлен к шестерне, тем сильнее сигнал, однако необходимо соблюдать осторожность, чтобы биение шестерни (колебание) не повредило переднюю часть датчика. По мере удаления датчика от цели сигнал будет уменьшаться, пока расстояние не станет настолько большим, что датчик больше не сможет точно определять вращение цели.
Чем ближе датчик установлен к шестерне, тем сильнее сигнал, однако необходимо соблюдать осторожность, чтобы биение шестерни (колебание) не повредило переднюю часть датчика. По мере удаления датчика от цели сигнал будет уменьшаться, пока расстояние не станет настолько большим, что датчик больше не сможет точно определять вращение цели.
Output Type Selection Guide
| OUTPUT TYPE | ADVANTAGES | DISADVANTAGES |
| Fixed Voltage (TTL/CMOS) | No additional components. Известное выходное напряжение. | Ухудшение сигнала при сложных нагрузках. Более чувствителен к линейному шуму. |
| Отслеживание поставок | Без дополнительных компонентов. Напряжение питания можно отслеживать. Бюджетный. | Ухудшение сигнала при сложных нагрузках. Более восприимчив к линейному шуму. Выход зависит от напряжения питания. |
| Открытый коллектор | Различное напряжение питания и выхода. Оптимизируйте ток привода, выбрав подтягивающий резистор. | Требуется дополнительный подтягивающий резистор. См. Калькулятор подтягивающих резисторов с открытым коллектором |
| Несимметричный двухтактный резистор с фиксированным напряжением | Без дополнительных компонентов. Известное выходное напряжение. Улучшена целостность сигнала при сложных нагрузках. Тепловая и шоу-защита цепи. | Умеренная помехоустойчивость линии. |
| Одностороннее двухтактное отслеживание поставок | Без дополнительных компонентов. Напряжение питания можно отслеживать. Улучшена целостность сигнала при сложных нагрузках. | Умеренная помехоустойчивость линии. Выход зависит от напряжения питания. Термическая защита и защита от короткого замыкания. |
| Дифференциальный двухтактный, фиксированный или с отслеживанием питания | Высокий уровень помехоустойчивости в сочетании с дифференциальным приемником с согласованным импедансом.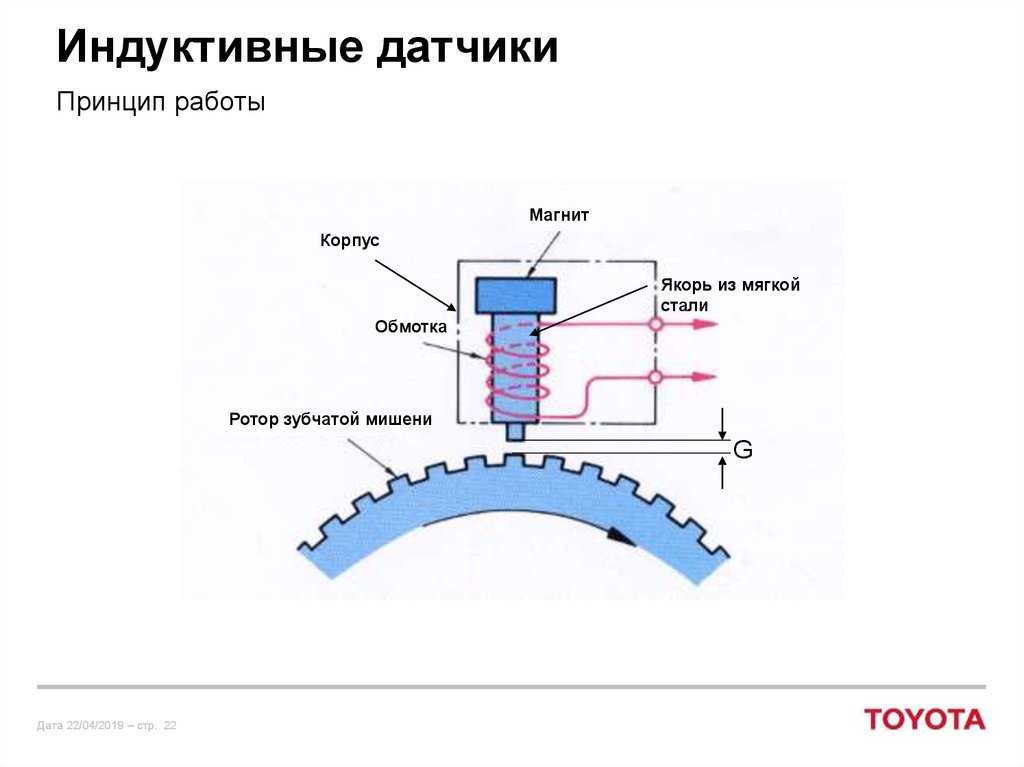 | Требуется два соединения для каждого выхода. Более высокая стоимость. |
Экстремальные приложения
Датчики движенияДатчики скорости специально разработаны для использования в экстремальных условиях. Наши датчики выбраны за их проверенную способность надежно работать в этих суровых условиях и разработаны с учетом этих конкретных условий окружающей среды. От аэрокосмической до железнодорожной и транспортной промышленности способность выдерживать перепады температуры, сильные удары и вибрацию, а также атмосферные факторы имеют важное значение для разработки успешного решения датчика скорости.
Высокие температуры
Наши датчики предназначены для надежной работы при экстремально высоких температурах. Высокотемпературные датчики с переменным магнитным сопротивлением (VR) предназначены для использования в средах с постоянной температурой 454°C и периодическим повышением до 538°C и используются в самых разных приложениях, от паровых турбин до ракет.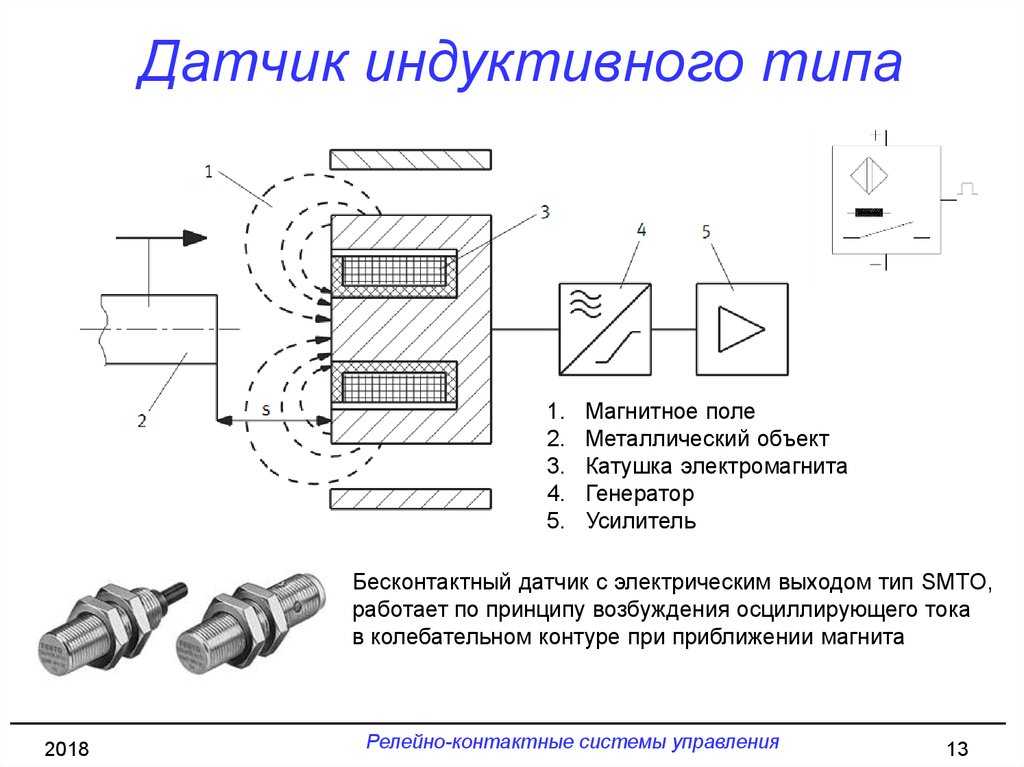 В то время как датчики VR предлагают самые высокие температуры; все наши датчики предназначены для максимального использования температурных возможностей. Мы предлагаем высокотемпературные радиочастотные модели, способные работать при температуре до 400°C, и все наши электронные продукты предлагаются в моделях, работающих при температуре до 125°C.
В то время как датчики VR предлагают самые высокие температуры; все наши датчики предназначены для максимального использования температурных возможностей. Мы предлагаем высокотемпературные радиочастотные модели, способные работать при температуре до 400°C, и все наши электронные продукты предлагаются в моделях, работающих при температуре до 125°C.
Криогеника
Герметичные датчики VR Motion Sensors идеально подходят для использования в криогенных приложениях. Стандартный диапазон рабочих температур составляет от -267°C до +232°C. Наши датчики уже много лет успешно используются в различных приложениях, включая бортовое оборудование космических челноков, расходомеры жидкого азота и криогенные ротаторы.
Термическое циклирование
Многие наши датчики скорости герметизированы специальным герметизирующим материалом, который обеспечивает превосходную компенсацию экстремальных температур и термоциклирования, гарантируя, что внутренние части датчика не будут повреждены из-за нагрузок от расширяющихся и сжимающихся компонентов. Это особенно важно в приложениях, в которых периодически наблюдаются самые экстремальные подъемы и понижения температуры.
Это особенно важно в приложениях, в которых периодически наблюдаются самые экстремальные подъемы и понижения температуры.
Высокая вибрация
Наши датчики прошли испытания в условиях высокой вибрации. Требования к испытаниям зависят от спецификаций приложения и включают спецификации DO160 и военных самолетов, испытания для использования на борту космических челноков и IEC 60068 для железнодорожных и транспортных приложений. Все наши стандартные линейки продуктов были протестированы в соответствии со стандартом MIL-STD-202G, метод 214A, условия испытаний H. Компания Motion Sensors имеет собственные возможности для проведения испытаний на вибрацию и может проверить характеристики вибрации датчика скорости в соответствии с требованиями конкретного применения.
Герметичное уплотнение
Оригинальные датчики скорости Motion Sensors были герметично закрыты со сварным швом на конце датчика и разъеме. Коннектор включает в себя уплотнение стекло-металл, гарантирующее, что внутренние компоненты датчика защищены от проникновения влаги.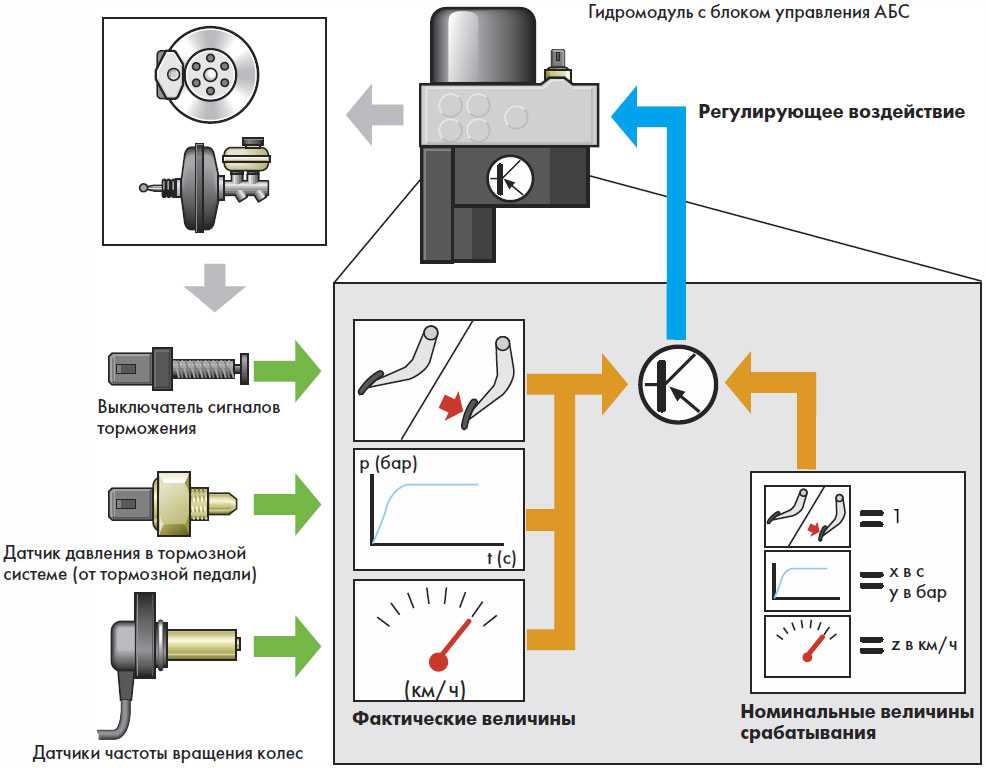 Мы по-прежнему используем эту конструкцию сегодня в большом количестве приложений, где условия окружающей среды требуют полностью герметичного решения. Области применения варьируются от установок, требующих санитарной очистки, до датчиков контроля топлива в аэрокосмической отрасли.
Мы по-прежнему используем эту конструкцию сегодня в большом количестве приложений, где условия окружающей среды требуют полностью герметичного решения. Области применения варьируются от установок, требующих санитарной очистки, до датчиков контроля топлива в аэрокосмической отрасли.
Конструкция из нержавеющей стали
Помимо герметичного уплотнения, компания Motion Sensors также изготавливает 99% наших датчиков скорости из нержавеющей стали, что обеспечивает превосходную защиту от ржавчины и коррозии. Несмотря на то, что это увеличивает стоимость по сравнению с решениями из формованных или пластмассовых изделий большого объема, оно обеспечивает надежность и качество, необходимые для экстремальных условий, в которых устанавливаются наши датчики скорости.
Компенсатор натяжения
На протяжении многих лет мы работали с рядом клиентов, чтобы предоставить решения для приложений, в которых существующие датчики преждевременно вышли из строя из-за отсутствия компенсатора натяжения.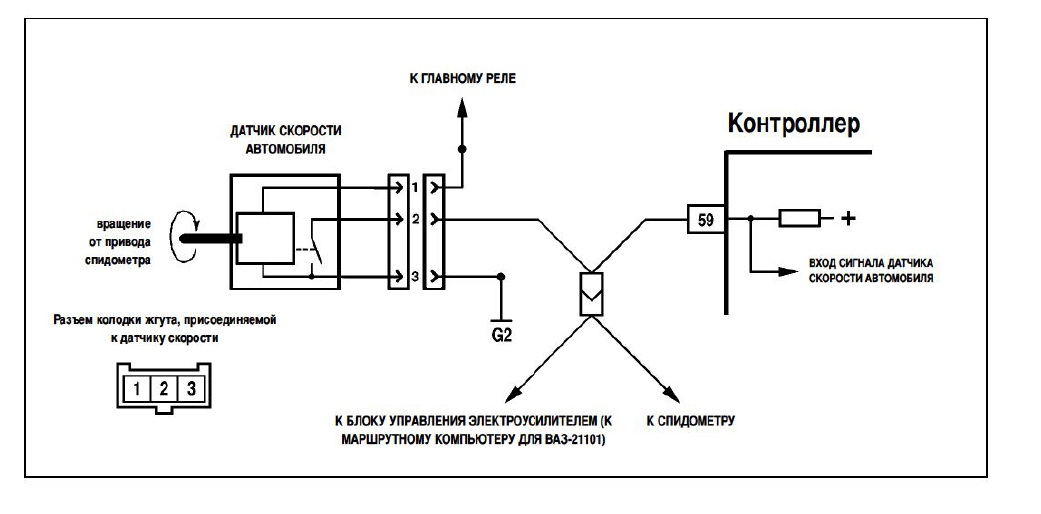 Наши конструкции предусматривают разгрузку от натяжения по всей конструкции датчика, от крепления выводов обмотки до соединений на печатной плате и паяных соединений разъемов. У нас также есть возможность включить дополнительную внешнюю разгрузку от натяжения в приложения с требованиями к проводке и кабелям, которые будут подвергаться сильным ударам, вибрации и истиранию, например, под шасси локомотива. Это достигается за счет использования таких опций, как термоусадка, литье под давлением, шланг и кабелепровод.
Наши конструкции предусматривают разгрузку от натяжения по всей конструкции датчика, от крепления выводов обмотки до соединений на печатной плате и паяных соединений разъемов. У нас также есть возможность включить дополнительную внешнюю разгрузку от натяжения в приложения с требованиями к проводке и кабелям, которые будут подвергаться сильным ударам, вибрации и истиранию, например, под шасси локомотива. Это достигается за счет использования таких опций, как термоусадка, литье под давлением, шланг и кабелепровод.
Рабочие температуры
Датчик скорости VR имеет самый широкий диапазон рабочих температур. У Motion Sensors есть модели VR с температурой от -267C до 538C. Модели с усилителем, включающие электронику, имеют более ограниченный температурный диапазон, в большинстве случаев от -40°C до 85°C, с высокотемпературными вариантами до 125°C. Температурный диапазон влияет как на цену, так и на производительность датчика из-за выбора материала и конструктивных ограничений, поэтому важно понимать температурный диапазон применения, чтобы выбрать подходящий датчик.
Typical ranges are as follows:
Variable Reluctance Sensors
-55C to 120C
–267C to 232C
-267C to 538C
RF Speed Sensors
-74 to 204C
— от 74 до 400C
Электроника, усилители и датчики Холла
от -40C до 85C
от -40C до 125C
Общие положения
Нулевая скорость
9Датчики скорости на эффекте Холла 0002 обеспечивают возможность определения истинной нулевой скорости, в то время как датчику с переменным магнитным сопротивлением потребуется определенное количество движений, чтобы определить движение цели. Радиочастотные датчики скорости обеспечивают «почти нулевую» реакцию скорости и используются вместо устройств на эффекте Холла в приложениях, где желательна нулевая скорость, но ограничения воздушного зазора, сопротивления или температуры делают использование технологии эффекта Холла нецелесообразным.
Перетаскивание
В некоторых приложениях сила Гаусса датчика имеет решающее значение. Например, многие приложения для измерения расхода турбины работают в условиях «низкого расхода», когда движению лопасти турбины может препятствовать магнитное поле датчика. В этих типах приложений обязательно, чтобы сила Гаусса была установлена, чтобы гарантировать, что вращение цели не будет затронуто, или чтобы использовалось решение, такое как датчик скорости RF, который практически не имеет магнитного поля. Приложения с валами или зубчатыми колесами, которые приводятся в действие механическим источником, таким как двигатель или шкив, скорее всего, не будут сталкиваться с такими проблемами.
Искробезопасность
Если датчик расположен в опасной зоне, может потребоваться искробезопасное сертифицированное устройство. Датчики движения могут предоставлять версии наших датчиков с переменным магнитным сопротивлением, радиочастотных, усиленных, датчиков Холла и магниторезистивных датчиков в искробезопасных версиях, которые сертифицированы как ATEX, так и CSA.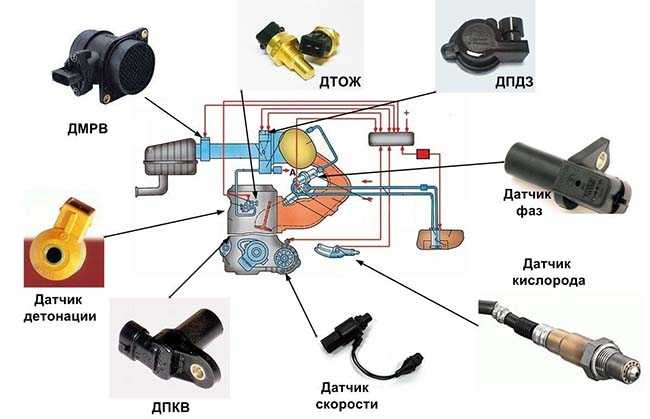 Мы также предлагаем сертифицированные версии наших автономных предусилителей. Для этих продуктов существуют особые рекомендации по установке и ограничения по диапазону температур окружающей среды.
Мы также предлагаем сертифицированные версии наших автономных предусилителей. Для этих продуктов существуют особые рекомендации по установке и ограничения по диапазону температур окружающей среды.
Наши сертификаты искробезопасности ATEX и CSA дают возможность настроить датчик в соответствии с конкретным применением или требованиями заказчика в соответствии с существующими сертификатами.
Преимущества включают в себя:
- полный спектр вариантов настройки датчика скорости, включая размер/длину резьбы, взаимное соединение (соединитель и косички), резьбу NPT и функциональные опции (сопротивление, сила Гаусса и т. д.)
- возможность предоставления сертифицированных версия «старой» конструкции датчика скорости для сокращения времени и затрат на полную квалификацию (характеристики датчика эквивалентны устаревшему датчику)
- сокращение сроков разработки специальных датчиков скорости, сертифицированных по ATEX или CSA — обычно 1-2 недели (по сравнению с месяцами, если требуется новая сертификация) пересмотренная сертификация
Принципы работы
- Эффект Холла
Датчики нулевой скорости - Переменное сопротивление
Датчики скорости - ВЧ (вихретоковый)
Датчики скорости - Усилитель (активный)
Датчики скорости - Предусилители
- Искробезопасные датчики скорости
- Взрывозащищенные
Датчики скорости
Датчики движения (MSI) Датчики на эффекте Холла (HE) представляют собой устройства для определения истинной нулевой скорости, в которых используется специальная микросхема твердотельного преобразователя, вырабатывающая выходное напряжение при изменении магнитного поля. Преобразователи на эффекте Холла производятся с различной чувствительностью, конфигурациями и типами выходного сигнала; аналоговый или цифровой. Стандартные датчики HE MSI делятся на две основные категории; ориентированный — требует ориентации по направлению движения цели, а неориентированный — не требует, но обычно имеет худшие характеристики при использовании с целями с более мелким шагом. Стандартные серии: ориентированные: H HD и неориентированные: HN.
Преобразователи на эффекте Холла производятся с различной чувствительностью, конфигурациями и типами выходного сигнала; аналоговый или цифровой. Стандартные датчики HE MSI делятся на две основные категории; ориентированный — требует ориентации по направлению движения цели, а неориентированный — не требует, но обычно имеет худшие характеристики при использовании с целями с более мелким шагом. Стандартные серии: ориентированные: H HD и неориентированные: HN.
Датчики Холла имеют ограничения; «сопротивление» при использовании с внутренним магнитным полем (возможны конструкции с нулевым сопротивлением, использующие внешнее магнитное возбуждение), ограниченное максимальное расстояние срабатывания (по сравнению с другими технологиями, такими как RF, и максимальная рабочая температура по сравнению с переменным сопротивлением (VR)
Переменное сопротивление (VR) ) датчики предлагают уникальное решение многих проблем системных измерений, предоставляя несложное, точное, надежное, универсальное счетное устройство
Датчик переменного магнитного сопротивления состоит из обмотки, намотанной на цилиндрический магнитный материал, обычно сделанный из какого-либо ферромагнитного материала, который называется полюсным наконечником. За полюсным наконечником прикреплен магнит, создающий магнитное поле через полюсный наконечник и обмотку. Это магнитное поле исходит из передней части полюсного наконечника, также известного как наконечник датчика. Когда железный материал проходит через это магнитное поле и разрушает его, генерируется электричество (синусоидальная волна). Они являются пассивными устройствами и не требуют внешнего источника питания для генерации сигнала.
За полюсным наконечником прикреплен магнит, создающий магнитное поле через полюсный наконечник и обмотку. Это магнитное поле исходит из передней части полюсного наконечника, также известного как наконечник датчика. Когда железный материал проходит через это магнитное поле и разрушает его, генерируется электричество (синусоидальная волна). Они являются пассивными устройствами и не требуют внешнего источника питания для генерации сигнала.
Таким образом, когда кончик датчика помещается рядом с движущимся или вращающимся устройством из черного металла, таким как шестерня или ротор, создается простой метод измерения скорости вращения. Частота сигнала прямо пропорциональна скорости вращения. На амплитуду сигнала влияет скорость вращения, измеряемый материал и расстояние, известное как «воздушный зазор», между наконечником датчика и вращающимся объектом.
Большинство производителей магнитных датчиков основывают свою конструкцию на очень малых воздушных зазорах от 0,005 до 0,015 дюйма. Увеличение размера этого зазора приводит к падению напряжения сигнала. В практическом применении такие небольшие зазоры могут быть опасными, особенно если воспринимаемый объект не концентричен или имеет тенденцию к потере концентричности при увеличении скорости или движения. В линейке датчиков VR Premium от MSI используется специальный «фокусирующий наконечник», который позволяет датчику работать с большими зазорами, превышающими 0,060 дюйма. Чем ближе датчик к воспринимаемому объекту, тем больше амплитуда. Однако датчики MSI позволяют чтобы датчик находился дальше от цели без быстрого ухудшения сигнала, как в других датчиках.
Увеличение размера этого зазора приводит к падению напряжения сигнала. В практическом применении такие небольшие зазоры могут быть опасными, особенно если воспринимаемый объект не концентричен или имеет тенденцию к потере концентричности при увеличении скорости или движения. В линейке датчиков VR Premium от MSI используется специальный «фокусирующий наконечник», который позволяет датчику работать с большими зазорами, превышающими 0,060 дюйма. Чем ближе датчик к воспринимаемому объекту, тем больше амплитуда. Однако датчики MSI позволяют чтобы датчик находился дальше от цели без быстрого ухудшения сигнала, как в других датчиках.
Motion Sensors также производит датчики с переменным магнитным сопротивлением, известные как индуктивные магнитные датчики. Они отличаются от стандартных датчиков VR тем, что магнит находится не в блоке, а в воспринимаемом объекте. Они используются, когда чувствительное вращающееся устройство не может быть изготовлено из черных металлов. Например, если цель, которую необходимо обнаружить, изготовлена из немагнитной нержавеющей стали, латуни, алюминия или пластика, центральный полюсный магнит может быть помещен в центр вращающегося устройства. В качестве альтернативы магниты могут быть встроены (на равном расстоянии друг от друга) во внешний край или диаметр мишени. Индуктивные датчики будут воспринимать магнитные поля и выдавать сигнал. Они также предназначены для обеспечения этой возможности при расстояниях воздушного зазора, значительно превышающих стандартные датчики VR, что требуется для расположения центральных полюсов магнитов.
В качестве альтернативы магниты могут быть встроены (на равном расстоянии друг от друга) во внешний край или диаметр мишени. Индуктивные датчики будут воспринимать магнитные поля и выдавать сигнал. Они также предназначены для обеспечения этой возможности при расстояниях воздушного зазора, значительно превышающих стандартные датчики VR, что требуется для расположения центральных полюсов магнитов.
Таким образом, датчики с переменным магнитным сопротивлением преобразуют механическое движение в электрическую энергию без прямого контакта, когда они расположены рядом с вращающимся ротором, шестерней, валом или другим регулярно движущимся устройством. Выходной сигнал может подаваться на цифровой счетчик, сумматор, аналоговый преобразователь, тахометр, устройство контроля превышения или понижения скорости, осциллограф или другое устройство контроля и управления. Датчик представляет собой простой, надежный и недорогой преобразователь для очень сложных систем управления.
Преимущества датчиков движения (MSI) Радиочастотные датчики: почти нулевая реакция скорости, отсутствие магнитного сопротивления, большие воздушные зазоры и способность обнаруживать цветные металлы, такие как алюминий и немагнитная нержавеющая сталь, а также черные металлы.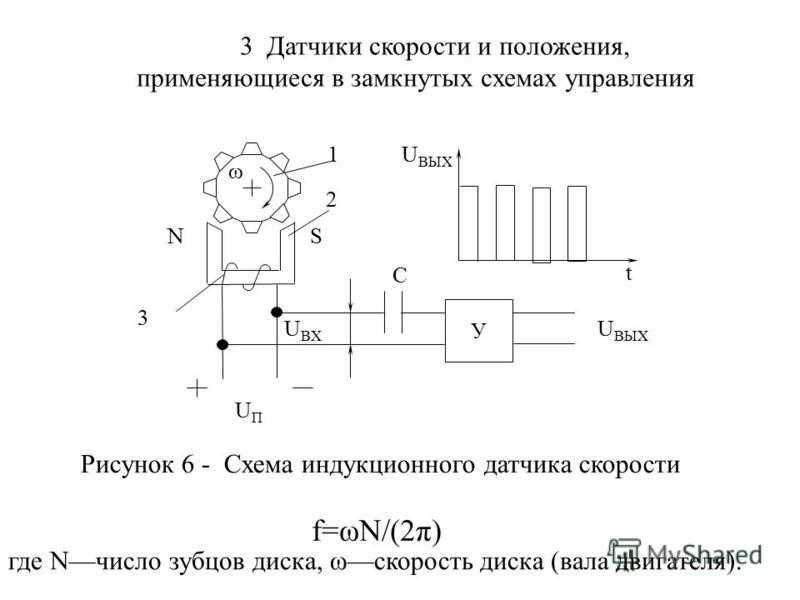 Радиочастотные датчики используют модулированный несущий сигнал для обнаружения вращающихся металлов. В отличие от своих аналогов с переменным магнитным сопротивлением (VR), радиочастотным датчикам для работы требуется внутренний или внешний предусилитель/преобразователь сигнала. При обнаружении цели образуются вихревые токи, уменьшающие амплитуду сигнала. Предварительный усилитель/преобразователь сигналов демодулирует сигнал, обнаруживает падение напряжения и формирует прямоугольный импульс (цифровой) на выходе с частотой, прямо пропорциональной количеству лопастей турбины, зубьев шестерни и т. д., которые были обнаружены.
Радиочастотные датчики используют модулированный несущий сигнал для обнаружения вращающихся металлов. В отличие от своих аналогов с переменным магнитным сопротивлением (VR), радиочастотным датчикам для работы требуется внутренний или внешний предусилитель/преобразователь сигнала. При обнаружении цели образуются вихревые токи, уменьшающие амплитуду сигнала. Предварительный усилитель/преобразователь сигналов демодулирует сигнал, обнаруживает падение напряжения и формирует прямоугольный импульс (цифровой) на выходе с частотой, прямо пропорциональной количеству лопастей турбины, зубьев шестерни и т. д., которые были обнаружены.
Сочетает в себе высокочувствительные усилители и преобразователи сигналов либо с переменным магнитным сопротивлением, либо с ВЧ преобразователями. Уникальные функции включают в себя определение скорости, близкой к нулевой скорости (2 Гц), большой воздушный зазор и несколько вариантов импульсного выхода.
Motion Sensors разработала стандартную линейку предусилителей и преобразователей сигналов для установки с нашими датчиками скорости.
