Как работают индуктивные датчики приближения. Какие бывают типы индуктивных датчиков. Где применяются индуктивные датчики в промышленности. Каковы преимущества и недостатки индуктивных датчиков приближения.
Принцип работы индуктивных датчиков приближения
Индуктивные датчики приближения — это бесконтактные устройства, предназначенные для обнаружения металлических объектов. Принцип их работы основан на изменении параметров электромагнитного поля при приближении металлического предмета.
Основные компоненты индуктивного датчика:
- Генератор высокочастотных колебаний
- Катушка индуктивности
- Схема обработки сигнала
- Выходной каскад
Как работает индуктивный датчик приближения:
- Генератор создает переменное электромагнитное поле вокруг катушки индуктивности
- При внесении металлического предмета в зону действия поля в нем возникают вихревые токи
- Вихревые токи создают встречное магнитное поле, которое ослабляет поле датчика
- Изменение параметров поля фиксируется схемой обработки сигнала
- Выходной каскад формирует сигнал о наличии объекта
Таким образом, индуктивный датчик реагирует на изменение собственной индуктивности при приближении металлического предмета.

Типы и конструкции индуктивных датчиков
По конструктивному исполнению индуктивные датчики приближения делятся на следующие основные типы:
Цилиндрические датчики
Имеют корпус в форме цилиндра. Диаметр может составлять от 3 до 30 мм. Это наиболее распространенный тип индуктивных датчиков.
Прямоугольные датчики
Имеют корпус прямоугольной формы. Удобны для монтажа в ограниченном пространстве. Часто используются в конвейерных системах.
Кольцевые датчики
Выполнены в форме кольца или трубы. Предназначены для контроля прохождения объектов через отверстие датчика.
Щелевые датчики
Имеют U-образную форму с прорезью. Объект обнаруживается при прохождении через прорезь датчика.
По способу установки различают:
- Утапливаемые датчики — могут быть утоплены в металл без экранирования
- Неутапливаемые датчики — требуют свободного пространства вокруг чувствительной поверхности
Характеристики индуктивных датчиков
Основные характеристики индуктивных датчиков приближения:
- Номинальное расстояние срабатывания — от 0.5 до 100 мм
- Гистерезис — разница между точками включения и выключения
- Частота переключения — до 5 кГц
- Температурный диапазон — обычно от -25°C до +70°C
- Степень защиты — IP67 и выше для промышленного применения
- Напряжение питания — 10-30 В постоянного тока
Какое расстояние срабатывания выбрать для индуктивного датчика? Это зависит от размеров контролируемых объектов и условий применения. Типичные значения:

- Малые объекты (до 10 мм) — 0.5-2 мм
- Средние объекты (10-50 мм) — 2-10 мм
- Крупные объекты (более 50 мм) — 10-30 мм
Области применения индуктивных датчиков
Индуктивные датчики приближения широко используются в промышленной автоматизации для следующих задач:
Контроль положения и перемещения объектов
- Определение крайних положений механизмов
- Контроль наличия деталей на конвейере
- Подсчет количества металлических изделий
Измерение скорости и частоты вращения
- Измерение скорости вращения валов и шестерен
- Определение частоты колебаний механизмов
Контроль целостности и размеров
- Проверка наличия отверстий в деталях
- Контроль толщины металлических листов
Позиционирование и навигация
- Определение положения подвижных узлов станков
- Навигация автоматических тележек на производстве
В каких отраслях чаще всего применяются индуктивные датчики приближения?
- Машиностроение
- Автомобильная промышленность
- Металлургия
- Упаковочное оборудование
- Робототехника
- Пищевая промышленность
Преимущества и недостатки индуктивных датчиков
Каковы основные достоинства индуктивных датчиков приближения?
- Отсутствие механического износа
- Высокая частота срабатывания
- Нечувствительность к загрязнениям
- Простота монтажа и настройки
- Долгий срок службы
- Работа в агрессивных средах
Какие недостатки есть у индуктивных датчиков?
- Реагируют только на металлические объекты
- Относительно небольшое расстояние срабатывания
- Чувствительность к электромагнитным помехам
- Зависимость от температуры окружающей среды
Сравнение индуктивных датчиков с другими типами
Как индуктивные датчики соотносятся с другими типами датчиков приближения?
Индуктивные vs емкостные датчики
- Индуктивные реагируют только на металл, емкостные — на любые материалы
- У индуктивных больше дальность и выше помехозащищенность
- Емкостные более чувствительны к загрязнениям
Индуктивные vs оптические датчики
- Оптические имеют намного большую дальность действия
- Индуктивные надежнее работают в запыленной среде
- Оптические могут обнаруживать любые объекты, не только металл
Индуктивные vs ультразвуковые датчики
- Ультразвуковые определяют расстояние до объекта
- Индуктивные имеют более высокое быстродействие
- Ультразвуковые работают с любыми материалами
Выбор и применение индуктивных датчиков
На что обратить внимание при выборе индуктивного датчика приближения?
- Требуемое расстояние срабатывания
- Размеры и материал объектов
- Условия окружающей среды (температура, влажность, вибрации)
- Требования к быстродействию
- Напряжение питания и тип выхода
- Габариты для монтажа
Рекомендации по применению индуктивных датчиков:
- Правильно выбирайте расстояние срабатывания с учетом допусков
- Обеспечьте надежное заземление датчика
- Избегайте воздействия сильных электромагнитных помех
- Учитывайте влияние температуры на характеристики
- Периодически очищайте чувствительную поверхность от загрязнений
Перспективы развития индуктивных датчиков
Какие тенденции наблюдаются в развитии индуктивных датчиков приближения?
- Увеличение дальности действия
- Повышение точности и стабильности характеристик
- Миниатюризация конструкции
- Расширение функциональных возможностей
- Интеграция с промышленными сетями
- Применение новых материалов для чувствительных элементов
Индуктивные датчики остаются одним из самых распространенных и надежных средств промышленной автоматизации. Их простота, долговечность и невысокая стоимость обеспечивают широкое применение в самых разных отраслях.

Індуктивний датчик для великих відстаней, металевий, 3/4-х провідна схема з розміром корпусу M18x1
Опис
Характеристики
Інформація для замовлення
Індуктивний датчик для великих відстаней, металевий, 3/4-х провідна схема з розміром корпусу M18x1
Індуктивний датчик руху — це безконтактний датчик який використовується для контролю положення металевих об’єктів. Принцип дії датчиків цього типу базується на зміні параметрів магнітного поля, що створюється котушкою всередині датчика при наближенні металевих предметів( це можуть бути зуби шестірні, кулачки, металеві деталі тощо). Такі датчики є одними з популярних пристроїв, вживаних для виявлення присутності об’єктів промислової автоматики, системах управління автоматизованим виробництвом.
По сравнению с другими устройствами индуктивные датчики имеют ряд отличительных преимуществ:
- высокая прочность и простота конструкции;
- простота монтажа и эксплуатации;
- совместимость с промышленными сетями питания;
- высокая чувствительность;
- долгий срок службы;
- низкая цена по сравнению с аналогичными приборами.
Головним обмеженням до застосування індуктивних датчиків наближення є сумісність тільки з металевими і магниточувствительными матеріалами. Це значно звужує область застосування приладів. При необхідності роботи з неметалевими матеріалами рекомендується використовувати в якості кінцевих вимикачів – датчики ємнісного типу. Також точність спрацьовування індуктивного вимикача може бути знижена при нестабільному харчуванні. Не рекомендується застосовувати датчики поблизу промислового обладнання, що генерує потужні магнітні поля або електричні перешкоди. Відповідно при роботі з індуктивними приладами необхідно ретельно підходити до організації робочого простору і робочої мережі живлення.
Це значно звужує область застосування приладів. При необхідності роботи з неметалевими матеріалами рекомендується використовувати в якості кінцевих вимикачів – датчики ємнісного типу. Також точність спрацьовування індуктивного вимикача може бути знижена при нестабільному харчуванні. Не рекомендується застосовувати датчики поблизу промислового обладнання, що генерує потужні магнітні поля або електричні перешкоди. Відповідно при роботі з індуктивними приладами необхідно ретельно підходити до організації робочого простору і робочої мережі живлення.
Сфера застосування:
- безконтактний контроль положення об’єктів у просторі;
- контроль стану елементів і частин машин і механізмів;
- контроль переміщення об’єктів;
- контроль швидкості руху об’єкта;
- сортування металевих об’єктів;
- контроль цілісності об’єктів;
- контроль заповнення;
- контроль кута повороту та багато інших.
Индуктивные датчики положения (приближения) – ТА
Индуктивные бесконтактные датчики приближения наиболее широко используются в качестве конечных выключателей в станках с ЧПУ на автоматических линиях и другом автоматизированном оборудовании. Они также применяются в системах управления технологическими процессами, где, как правило, выполняют функции датчиков обратной связи, сигнализируя о завершении выполнения конкретным элементом оборудования команды на перемещение в определенное положение.
Они также применяются в системах управления технологическими процессами, где, как правило, выполняют функции датчиков обратной связи, сигнализируя о завершении выполнения конкретным элементом оборудования команды на перемещение в определенное положение.
Применение индуктивных датчиков оправдано в ответственных системах, где важна надежная работа оборудования, поскольку они намного надежнее изделий с микропереключателями и герконами.
Для выбора датчиков по параметрам воспользуйтесь фильтрами слева.
Принцип действия
Индуктивные датчики положения объектов имеют чувствительный элемент в виде катушки индуктивности с открытым в сторону активной поверхности магнитопроводом. Перед активной поверхностью датчика образуется электромагнитное поле.
При внесении металлического объекта в это поле, колебания генератора затухают, демодулированное напряжение падает, триггер срабатывает, коммутационный элемент переключается, давая сигнал в систему управления о наличии объекта в зоне контроля.
Расстояние срабатывания и объект воздействия
В технических параметрах индуктивных бесконтактных датчиков указываются их номинальные (условные) расстояния срабатывания Sn. Они не учитывают допуски при изготовлении датчиков или отклонения, обусловленные внешними факторами (напряжение питания и температура), и могут отличаться от реальных расстояний срабатывания Sr.
При определении реальных расстояний срабатывания Sr используется стандартный объект воздействия из металла (квадратная пластина из Ст 3 толщиной 1 мм, со стороной, равной 3Sn или диаметру чувствительной поверхности). При работе с объектами из других металлов и сплавов, а также если объект воздействия имеет размеры меньше стандартного, расстояния срабатывания могут уменьшаться (при расчетах необходимо применять поправочные коэффициенты K).
Для предварительных расчетов можно использовать следующие поправочные коэффициенты материала объекта воздействия:
- нержавеющая сталь: K=0,8
- нихром: K=0,9
- латунь: K=0,5
- алюминий: K=0,5
- медь: K=0,48
Выделяются также группы датчиков с поправочным коэффициентом K=1 (расстояние срабатывания не зависит от типа используемого металла) и с поправочным коэффициентом K=0 (срабатывание только на железо).
Обычно на практике объект воздействия изготавливается в виде стальной пластины требуемых размеров, соединенной с движущейся деталью механизма, положение которой нужно контролировать.
Для надежного и однозначного переключения индуктивного датчика его расстояние срабатывания и расстояние отпускания при обратном ходе объекта делаются разными (разность расстояний определяется параметром «дифференциальный ход»).
Технология датчика приближения Рекомендации по проектированию
Существует несколько ведущих технологий датчиков приближения; у каждого из них очень разные стандарты работы и разные сильные стороны, когда дело доходит до определения обнаружения, расстояния или близости.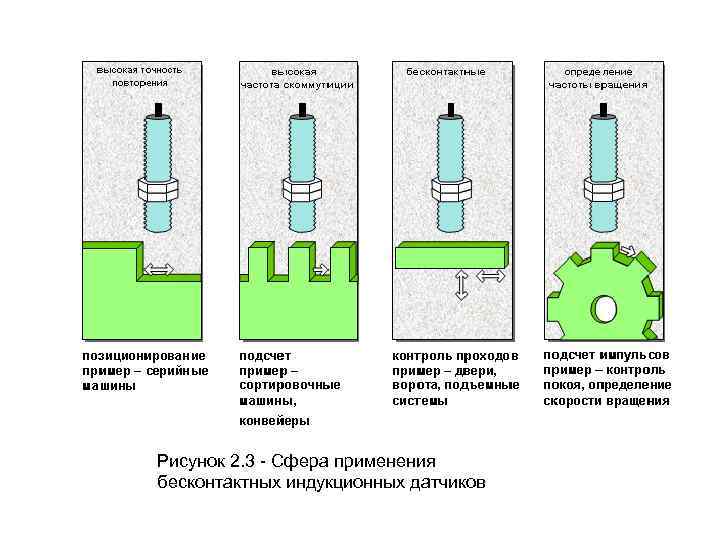 В этой статье описываются четыре возможных варианта компактных стационарных встраиваемых систем и их основные принципы работы, чтобы помочь инженерам определить, какой из них выбрать в зависимости от их требований к конструкции.
В этой статье описываются четыре возможных варианта компактных стационарных встраиваемых систем и их основные принципы работы, чтобы помочь инженерам определить, какой из них выбрать в зависимости от их требований к конструкции.
Датчики приближения обеспечивают точный метод определения присутствия объекта и расстояния до него без физического контакта. Датчик излучает электромагнитное поле, свет или ультразвуковую волну, которая отражается от объекта или проходит сквозь него и возвращается к датчику. Существенным преимуществом бесконтактных датчиков по сравнению с обычными концевыми выключателями является то, что они более долговечны и могут служить дольше, поскольку в них нет механических частей.
При рассмотрении идеальной технологии датчика приближения для конкретного приложения необходимо учитывать стоимость, диапазон, размер, частоту обновления или задержку, а также влияние материала и рассматривать их в контексте того, что является наиболее важным для конструкции.
Ультразвуковой
Как следует из названия, ультразвуковые датчики приближения излучают ультразвуковой импульс звука, называемый «щебетом», для обнаружения присутствия объекта, а также могут использоваться для расчета расстояния до объекта. Они состоят из передатчика и приемника, и их функция основана на принципах эхолокации (рис. 1).
Рисунок 1: Принцип работы ультразвукового датчика. (Источник изображения: CUI Devices)
Путем измерения времени, необходимого для отражения звукового сигнала от поверхности и возврата, которое часто называют «временем пролета» (ToF), датчик может определить, насколько далеко объект есть. Обычно передатчик и приемник находятся рядом друг с другом, но использование эхолокации все равно будет работать, когда передатчик и приемник разнесены. В некоторых случаях функции передачи и приема объединяются в один пакет; эти устройства известны как ультразвуковые приемопередатчики.
Благодаря использованию звука, а не электромагнитных волн, показания ультразвукового датчика не зависят от цвета и прозрачности объекта.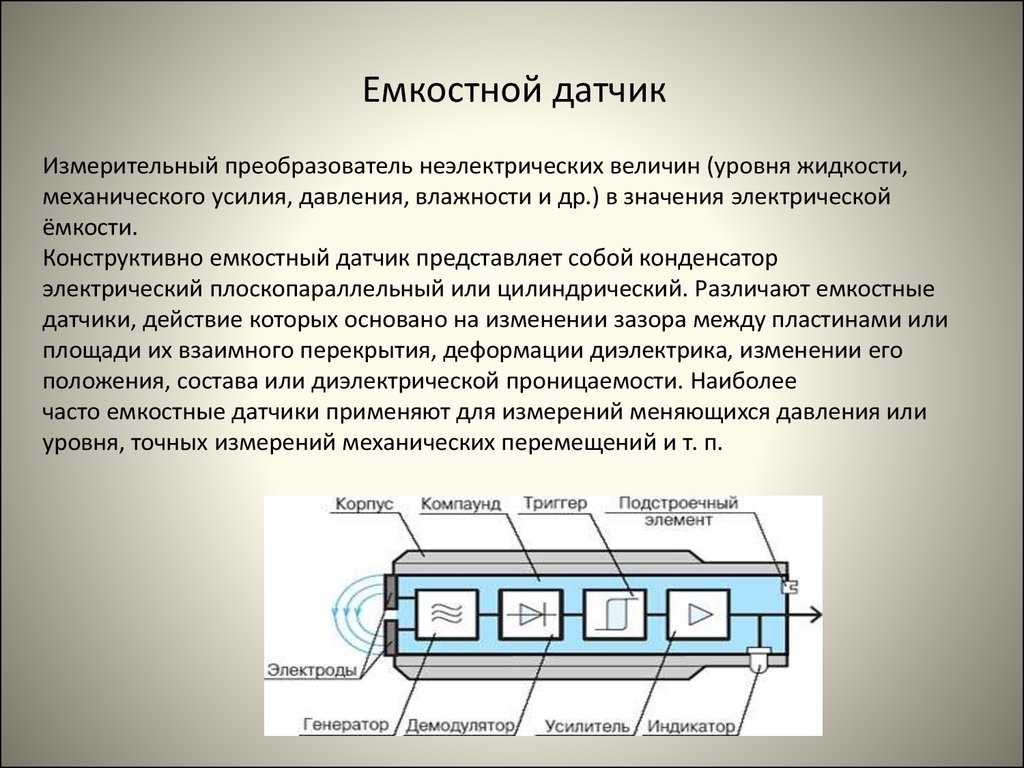 У них также есть дополнительное преимущество, заключающееся в том, что они не производят света, что делает их идеальными для темных или даже ярко освещенных помещений. Звуковые волны распространяются во времени и на расстоянии, как рябь на воде, и это расширение области обнаружения или поля зрения (FoV) можно рассматривать как преимущество или недостаток в зависимости от применения. Тем не менее, с хорошим уровнем точности, довольно высокой частотой обновления и способностью передавать сотни импульсов в секунду, ультразвуковые датчики приближения могут стать экономичным, универсальным и безопасным решением.
У них также есть дополнительное преимущество, заключающееся в том, что они не производят света, что делает их идеальными для темных или даже ярко освещенных помещений. Звуковые волны распространяются во времени и на расстоянии, как рябь на воде, и это расширение области обнаружения или поля зрения (FoV) можно рассматривать как преимущество или недостаток в зависимости от применения. Тем не менее, с хорошим уровнем точности, довольно высокой частотой обновления и способностью передавать сотни импульсов в секунду, ультразвуковые датчики приближения могут стать экономичным, универсальным и безопасным решением.
Одним из принципиальных недостатков ультразвуковых датчиков является то, что изменение температуры воздуха будет влиять на скорость звуковой волны, что снизит точность измерений. Однако это можно уравновесить, измерив температуру на расстоянии между передатчиком и приемником и соответствующим образом скорректировав расчеты. К другим ограничениям относится тот факт, что ультразвуковые датчики нельзя использовать в вакууме, где нет воздуха для передачи звука.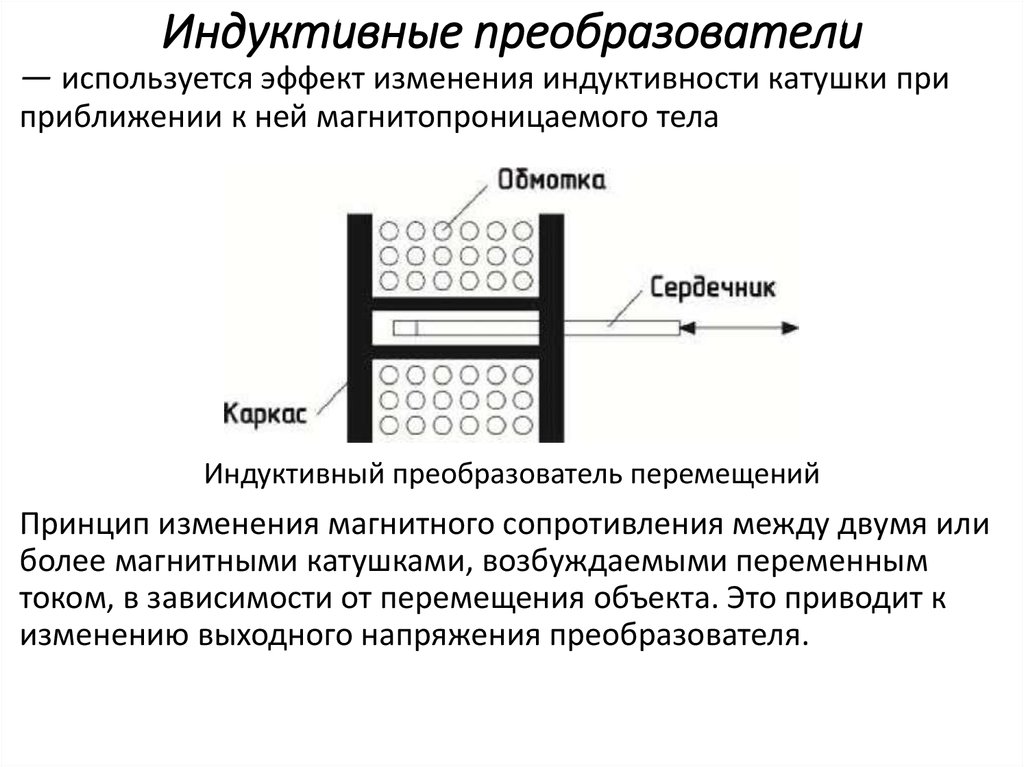 Мягкие материалы также не будут отражать звук так эффективно, как твердые поверхности, что может повлиять на точность. Наконец, хотя технология ультразвуковых датчиков аналогична концепции сонара, она не работает под водой.
Мягкие материалы также не будут отражать звук так эффективно, как твердые поверхности, что может повлиять на точность. Наконец, хотя технология ультразвуковых датчиков аналогична концепции сонара, она не работает под водой.
Фотоэлектрический
Для обнаружения присутствия или отсутствия объекта можно использовать фотоэлектрические датчики. Как правило, они основаны на инфракрасном спектре, с типичными приложениями, включая датчики гаражных ворот или подсчет посетителей в магазинах, хотя они подходят для широкого спектра других промышленных применений.
Существует несколько способов реализации фотоэлектрических датчиков (рис. 2). Сквозной луч использует излучатель на одной стороне объекта с детектором напротив. Если луч ломается, то это указывает на наличие объекта. Световозвращающая реализация — это когда излучатель и детектор расположены вместе, а отражатель — напротив. Точно так же рассеянное расположение также совмещает излучатель и детектор, но вместо этого излучаемый свет отражается от любого обнаруживаемого объекта. Эта установка не позволяет измерять расстояние.
Эта установка не позволяет измерять расстояние.
Рис. 2: Фотоэлектрические датчики – на пересечение луча, на обратное и на диффузное отражение. (Источник изображения: CUI Devices)
Установка фотоэлектрического датчика в конфигурации с пересечением луча или отражателем делает его пригодным для приложений, требующих расширенного диапазона обнаружения с малой задержкой. Однако, поскольку их необходимо тщательно монтировать и выравнивать, установка системы в загруженных средах может оказаться сложной задачей. Реализации диффузного типа больше подходят для обнаружения мелких объектов, а также могут быть мобильными детекторами.
Установки фотоэлектрических датчиков могут использоваться в грязных условиях, часто встречаются в промышленных условиях, и обычно имеют более длительный срок службы, чем другие альтернативы, из-за отсутствия движущихся частей. Пока объектив защищен и содержится в чистоте, производительность датчиков будет поддерживаться. Хотя они могут ощущать большинство объектов, могут возникнуть проблемы с прозрачными и отражающими поверхностями и водой. Другие ограничения включают точный расчет расстояния и, в зависимости от оптического источника, обнаружение объектов определенного цвета, например, красного при использовании ИК.
Другие ограничения включают точный расчет расстояния и, в зависимости от оптического источника, обнаружение объектов определенного цвета, например, красного при использовании ИК.
Лазерные дальномеры
Лазерный дальномер (LRF), который исторически был дорогим вариантом, в последнее время стал более жизнеспособным решением для многих приложений. Датчики высокой мощности работают по тому же принципу, что и ультразвуковые датчики, но вместо звуковых волн используют лазерный луч.
Поскольку фотоны движутся с такой высокой скоростью, точное вычисление ToF может быть затруднено. Здесь такие методы, как использование интерферометрии, могут помочь сохранить точность при одновременном снижении затрат (рис. 3). Еще одним преимуществом датчиков лазерного дальномера является то, что благодаря использованию электромагнитного луча они обычно имеют невероятно большой радиус действия (до тысячи футов) и минимальное время отклика.
Рис. 3. Реализация датчика лазерного дальномера с использованием интерферометрии. (Источник изображения: CUI Devices)
(Источник изображения: CUI Devices)
Несмотря на сверхмалую задержку и дальность действия этих датчиков, у них есть свои ограничения. Лазеры потребляют много энергии, что, в свою очередь, означает, что они не подходят для работы от батарей или портативных приложений, и есть вопросы безопасности, которые следует учитывать в отношении здоровья глаз. Еще одно соображение заключается в том, что поле зрения также относительно узкое, и, как и в случае с фотоэлектрическими датчиками, они плохо работают с водой или стеклом. Несмотря на то, что цена на этот тип технологии снижается, он по-прежнему остается одним из самых дорогих доступных вариантов.
Индуктивные
Индуктивные датчики существуют уже много лет, но они становятся все более популярными. Однако, в отличие от других технологий бесконтактного обнаружения, они будут работать только с металлическими объектами, поскольку для обнаружения используют магнитное поле (рис. 4). Типичным приложением может быть металлоискатель.
Рис. 4. Принцип работы индуктивного датчика (Источник изображения: CUI Devices)
Дальность обнаружения может различаться в зависимости от настройки датчика. Приложением для ближнего действия может быть подсчет оборотов шестерни путем определения наличия зуба шестерни рядом с датчиком. Более длительными приложениями могут быть подсчет транспортных средств путем встраивания индуктивных датчиков в дорожное покрытие или даже демонстрация экстремального расстояния, на котором датчики могут работать — обнаружение космической плазмы. В качестве датчика приближения индуктивные датчики, как правило, используются для приложений очень малого радиуса действия и могут обеспечивать чрезвычайно высокую частоту обновления благодаря тому, что они основаны на принципе обнаружения различий в электромагнитных полях. Они также лучше работают с черными материалами, такими как железо и сталь.
Индуктивные датчики предлагают экономичное решение в широком диапазоне. Однако необходимо учитывать ограничения того, какие материалы они могут ощущать, а также тот факт, что они восприимчивы к широкому спектру источников помех.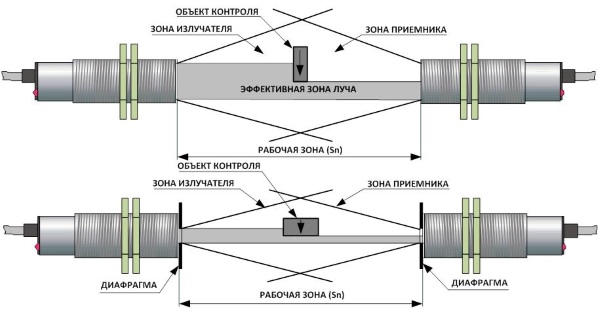
Заключение
При рассмотрении всех проблем реализации датчиков приближения ультразвуковые датчики часто являются лучшей общей технологией (рис. 5). Их низкая стоимость, способность обнаруживать присутствие объекта, точно рассчитывать расстояние до него и простота использования — вот их преимущества.
Рисунок 5: Сравнение четырех технологий датчиков приближения (Источник изображения: CUI Devices)
Для получения дополнительной информации об ультразвуковых датчиках от CUI Devices посетите: Ультразвуковые датчики CUI Devices
Отказ от ответственности: мнения, убеждения и точки зрения, выраженные различными авторами и/или участниками форума на этом веб-сайте, не обязательно отражают мнения, убеждения и точки зрения Digi-Key Electronics или официальную политику Digi-Key Electronics.
Обзор датчиков близости
Эта статья была обновлена 30 ноября 2022 года. Первоначально она была опубликована 1 сентября 2001 г.
АВТОРСКИЙ
Разбор датчиков
A Введение в датчики для автоматизации машин
Достижения в области датчиков движения ведут к Smart Motion
Датчики приближения определяют наличие или отсутствие объектов с помощью электромагнитных полей, света и звука.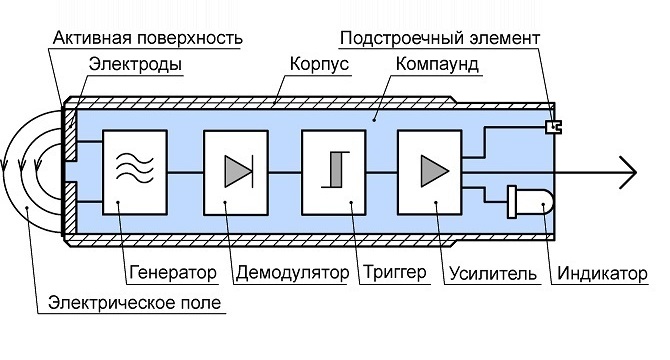 Существует много типов, каждый из которых подходит для определенных приложений и сред. Вот взгляд на самые популярные технологии обнаружения приближения.
Существует много типов, каждый из которых подходит для определенных приложений и сред. Вот взгляд на самые популярные технологии обнаружения приближения.
Индуктивные датчики
Индуктивные датчики представляют собой бесконтактные датчики приближения, которые обнаруживают железные цели, в идеале сделанные из мягкой стали толщиной более одного миллиметра. Они состоят из четырех основных компонентов: ферритового сердечника с катушками, генератора, триггера Шмитта и выходного усилителя. Они размещены в корпусах, обычно изготовленных из никелированной латуни, нержавеющей стали или пластика PBT.
Генератор создает симметричное колеблющееся магнитное поле, которое исходит от ферритового сердечника и массива катушек на лицевой стороне датчика. Когда металлическая мишень попадает в это магнитное поле, небольшие электрические токи (вихревые токи), индуцируемые на поверхности металла, изменяют сопротивление (собственную частоту) магнитопровода, что, в свою очередь, уменьшает амплитуду колебаний. По мере того, как все больше металла попадает в поле обнаружения, амплитуда колебаний уменьшается и в конечном итоге схлопывается. (Это принцип «вихретокового осциллятора», или ECKO, принцип.) Триггер Шмитта реагирует на эти изменения амплитуды и регулирует выходной сигнал датчика. Когда цель, наконец, выходит за пределы диапазона датчика, схема снова начинает колебаться, и триггер Шмитта возвращает датчик к его предыдущему выходному сигналу.
По мере того, как все больше металла попадает в поле обнаружения, амплитуда колебаний уменьшается и в конечном итоге схлопывается. (Это принцип «вихретокового осциллятора», или ECKO, принцип.) Триггер Шмитта реагирует на эти изменения амплитуды и регулирует выходной сигнал датчика. Когда цель, наконец, выходит за пределы диапазона датчика, схема снова начинает колебаться, и триггер Шмитта возвращает датчик к его предыдущему выходному сигналу.
Если датчик имеет нормально разомкнутую конфигурацию, его выход представляет собой сигнал «включено», когда цель входит в зону обнаружения. При нормально закрытых датчиках выходной сигнал является сигналом «выключено», когда цель присутствует. Выходные данные считываются внешним блоком управления, таким как ПЛК, контроллер движения или интеллектуальный привод, который преобразует состояния датчика «включено» и «выключено» в полезную информацию.
Индуктивные датчики обычно оцениваются по частоте или количеству циклов включения/выключения в секунду. Диапазон скоростей составляет от 10 до 20 Гц переменного тока или от 500 Гц до 5 кГц постоянного тока. Из-за ограничений магнитного поля индуктивные датчики имеют относительно узкий диапазон чувствительности — в среднем от долей миллиметров до 60 мм. (Также доступны специальные индуктивные датчики с большим радиусом действия.) И то, что индуктивным датчикам не хватает в диапазоне, они компенсируют адаптируемостью к окружающей среде и универсальностью обнаружения металла.
Диапазон скоростей составляет от 10 до 20 Гц переменного тока или от 500 Гц до 5 кГц постоянного тока. Из-за ограничений магнитного поля индуктивные датчики имеют относительно узкий диапазон чувствительности — в среднем от долей миллиметров до 60 мм. (Также доступны специальные индуктивные датчики с большим радиусом действия.) И то, что индуктивным датчикам не хватает в диапазоне, они компенсируют адаптируемостью к окружающей среде и универсальностью обнаружения металла.
Для установки на близком расстоянии в ограниченном пространстве промышленного оборудования доступны следующие геометрические и монтажные стили: экранированные (заподлицо), неэкранированные (не заподлицо), трубчатые и прямоугольные «плоские упаковки». Трубчатые датчики, безусловно, самые популярные, доступны диаметром от 3 до 40 мм.
Индуктивные датчики не имеют изнашиваемых движущихся частей, поэтому правильная настройка гарантирует долгий срок службы. Датчики со степенью защиты IP 67 и выше могут выдерживать накопление загрязняющих веществ, таких как смазочно-охлаждающие жидкости, жир и неметаллическая пыль, как в воздухе, так и на самом датчике.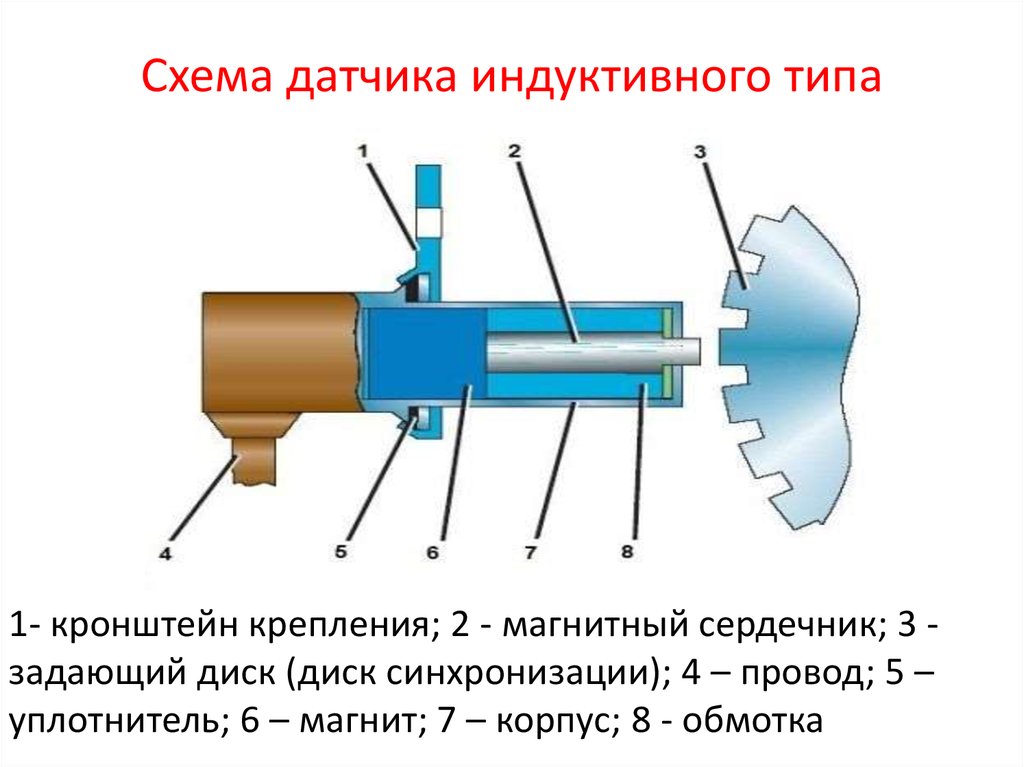 Следует отметить, что металлические загрязнения, такие как опилки от режущих инструментов, иногда влияют на работу индуктивного датчика.
Следует отметить, что металлические загрязнения, такие как опилки от режущих инструментов, иногда влияют на работу индуктивного датчика.
Емкостные датчики
Емкостные датчики приближения обнаруживают как металлические, так и неметаллические цели в виде порошка, гранулята, жидкости и твердого тела. Они также могут «видеть» сквозь цветные материалы.
В этих датчиках две проводящие пластины (с разными потенциалами) размещены в чувствительной головке и расположены так, чтобы работать как открытый конденсатор. Воздух действует как изолятор; в состоянии покоя между двумя пластинами имеется небольшая емкость. Как и индуктивные датчики, эти пластины связаны с генератором, триггером Шмитта и выходным усилителем.
Когда цель входит в зону обнаружения, емкость двух пластин увеличивается, вызывая изменение амплитуды генератора, что, в свою очередь, изменяет состояние триггера Шмитта и создает выходной сигнал. Если датчик имеет нормально открытый и нормально закрытый варианты, говорят, что он имеет дополнительный выход. Обратите внимание на разницу между индуктивными и емкостными датчиками: индуктивные датчики колеблются до тех пор, пока цель не появится, а емкостные датчики колеблются, когда цель присутствует.
Обратите внимание на разницу между индуктивными и емкостными датчиками: индуктивные датчики колеблются до тех пор, пока цель не появится, а емкостные датчики колеблются, когда цель присутствует.
Емкостное считывание предполагает зарядку пластин, поэтому оно несколько медленнее, чем индуктивное: от 10 до 50 Гц, с расстоянием срабатывания от 3 до 60 мм. Доступны многие стили жилья; обычные диаметры варьируются от 12 до 60 мм в экранированном и неэкранированном исполнении. Корпуса обычно изготавливаются из металла или пластика PBT, что делает их достаточно прочными для установки рядом с контролируемым процессом. Из-за их способности обнаруживать большинство типов материалов емкостные датчики следует держать подальше от нецелевых материалов, чтобы избежать ложных срабатываний. По этой причине, если предполагаемые цели содержат железосодержащие материалы, более надежным вариантом будут индуктивные датчики.
Фотоэлектрические датчики
Фотоэлектрические датчики оказались настолько универсальными, что инженеры и проектировщики используют их для решения большинства задач промышленных датчиков. Обычно они обнаруживают цели диаметром менее 1 мм или на расстоянии 60 м.
Обычно они обнаруживают цели диаметром менее 1 мм или на расстоянии 60 м.
Фотоэлектрические датчики классифицируются по тому, как свет излучается и доставляется к приемнику. Однако все они состоят из нескольких основных компонентов: источника света, такого как светодиод или лазерный диод, фотодиодного или фототранзисторного приемника для обнаружения излучаемого света и поддерживающей электроники, которая усиливает принимаемые сигналы. Излучатель, иногда называемый отправителем, передает луч видимого или инфракрасного света на обнаруживающий приемник.
Все фотоэлектрические датчики работают по схожим принципам, но существуют разные классификации. Например, классификации темного и светлого света относятся к приему света и выходным сигналам датчиков. Если выходы генерируются, когда свет не поступает, датчик включен. Если они генерируются из полученного света, датчик включен. Существуют также фотоэлектрические датчики, которые могут быть настроены техническими специалистами с помощью переключателя или проводки датчика соответственно, чтобы они были датчиками света или темноты.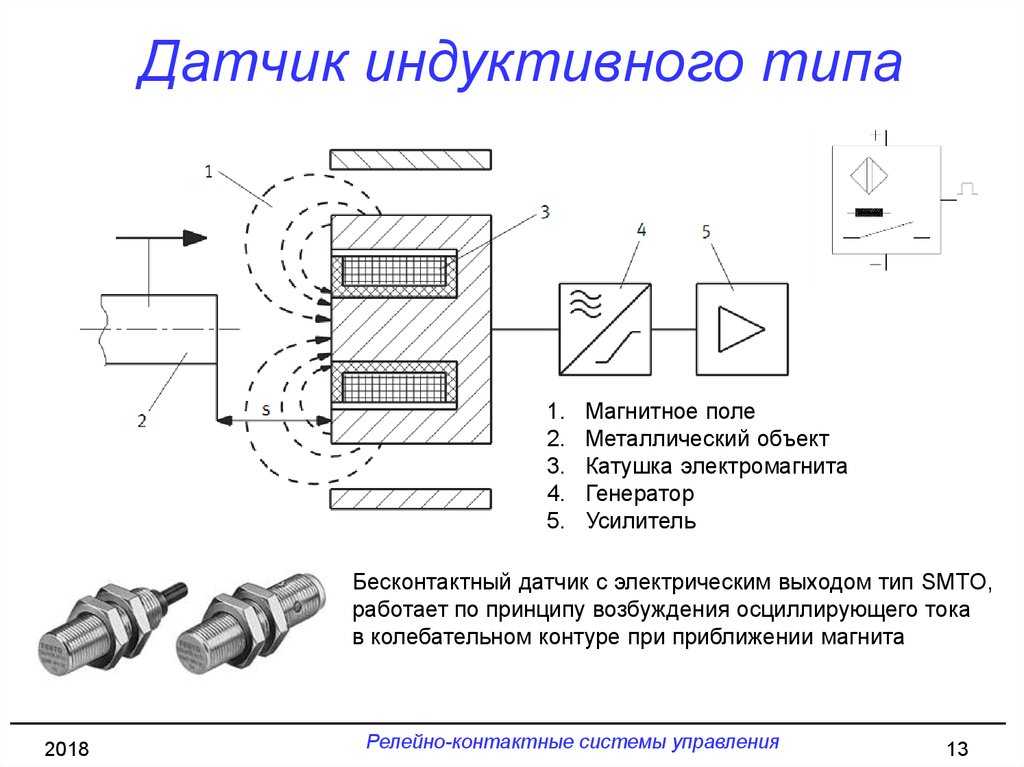
Фотоэлектрические датчики на пересечение луча представляют собой наиболее надежный класс фотоэлектрических датчиков. В датчиках на пересечение луча приемник и излучатель находятся в отдельных корпусах. Излучатель обеспечивает постоянный луч света, и когда объект прерывает этот луч, он обнаруживается. Несмотря на свою надежность, сквозной луч является наименее популярной фотоэлектрической установкой из-за затрат и труда, необходимых для покупки, установки и выравнивания излучателя и приемника в двух противоположных местах, которые могут быть на значительном расстоянии друг от друга.
Датчики на пересечение луча обычно обеспечивают самое большое расстояние срабатывания среди фотоэлектрических датчиков, более 25 метров. Лазерные светодиоды могут передавать хорошо коллимированные лучи на 60 м для повышения точности и обнаружения. Некоторые лазерные датчики с пересечением луча могут обнаружить объект размером с муху на этом расстоянии; на близком расстоянии объекты могут быть размером всего 0,01 мм.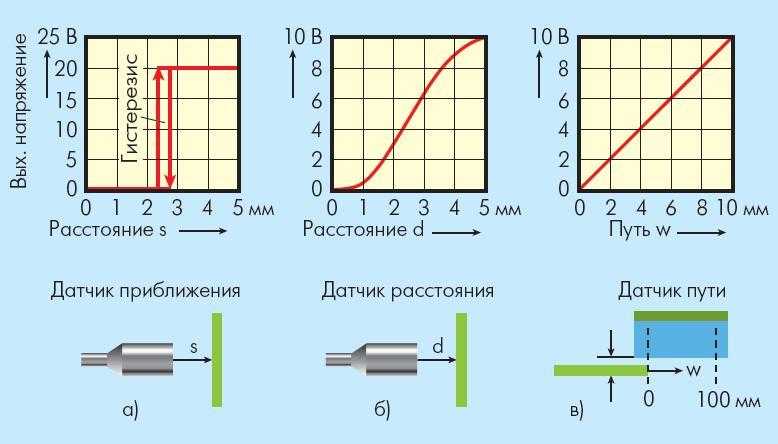 Но хотя эти лазерные датчики повышают точность, скорость отклика такая же, как и у нелазерных датчиков, обычно около 500 Гц.
Но хотя эти лазерные датчики повышают точность, скорость отклика такая же, как и у нелазерных датчиков, обычно около 500 Гц.
Одной из уникальных особенностей фотоэлектрических датчиков на пересечение луча является то, что они работают, несмотря на густые загрязняющие вещества в воздухе. Тем не менее, если загрязняющие вещества накапливаются на излучателе или приемнике, существует более высокая вероятность ложного срабатывания. Однако некоторые производители встраивают в схему датчика сигнализацию, которая отслеживает количество света, попадающего на приемник. Если обнаруженный свет падает ниже указанного уровня без цели, датчик отправляет предупреждение через встроенный светодиод или выходной провод.
Фотоэлектрические датчики с обратным отражением имеют следующие по величине расстояния фотоэлектрического обнаружения, при этом некоторые цели обнаруживаются на расстоянии 10 метров. Работая аналогично датчикам на пересечение луча, выходной сигнал возникает при нарушении постоянного луча. Но излучатель и приемник имеют общий корпус и обращены в одном направлении. Излучатель направляет лазерный, инфракрасный или видимый световой луч на отражатель, предназначенный для отправки луча обратно в приемник. Когда объект прерывает световой путь, он обнаруживается.
Но излучатель и приемник имеют общий корпус и обращены в одном направлении. Излучатель направляет лазерный, инфракрасный или видимый световой луч на отражатель, предназначенный для отправки луча обратно в приемник. Когда объект прерывает световой путь, он обнаруживается.
Одним из преимуществ светоотражающих датчиков по сравнению с датчиками на пересечение луча является то, что их проще установить (один корпус в одном месте), а противоположная сторона представляет собой просто установленный отражатель. Однако блестящие и отражающие объекты, такие как зеркала, банки и коробки из-под сока, могут отражать достаточно света, чтобы заставить приемник думать, что луч не был прерван, что приводит к ошибочным выводам. Некоторые производители решили эту проблему с помощью поляризационной фильтрации, которая обнаруживает только тот свет, который отражается от специально разработанных отражателей.
Диффузные фотоэлектрические датчики также имеют излучатель и приемник в одном корпусе, но без отражателя. Вместо этого цель выполняет эту роль. Излучатель посылает луч света — обычно импульсный ИК, видимый красный или лазерный, который рассеивается во всех направлениях — заполняя область обнаружения. Когда цель входит в эту зону, она отклоняет часть рассеянного луча обратно к приемнику. Когда на приемник отражается достаточно света, датчик, который может быть светлым или темным, сигнализирует об обнаружении цели.
Вместо этого цель выполняет эту роль. Излучатель посылает луч света — обычно импульсный ИК, видимый красный или лазерный, который рассеивается во всех направлениях — заполняя область обнаружения. Когда цель входит в эту зону, она отклоняет часть рассеянного луча обратно к приемнику. Когда на приемник отражается достаточно света, датчик, который может быть светлым или темным, сигнализирует об обнаружении цели.
При монтаже только корпуса излучателя/приемника диффузионные датчики обычно проще устанавливать, чем датчики на пересечение луча и датчики с обратным отражением.
Одним из кажущихся недостатков диффузных датчиков является то, что они чувствительны к материалу объекта и свойствам поверхности. Неотражающие цели, такие как матово-черная бумага, например, должны быть ближе к датчику, чтобы их можно было обнаружить, чем ярко-белые цели того же размера. Но то, что кажется недостатком, может быть полезным. Поскольку диффузные датчики в некоторой степени зависят от цвета, их можно спроектировать так, чтобы они различали темные и светлые объекты для сортировки или контроля качества.
Отражающий фон когда-то был проблемой для диффузных сенсоров. Они могут сократить расстояние срабатывания датчиков и генерировать ложные срабатывания, показывая, что цель присутствует, когда ее нет. Итак, инженеры разработали два способа заставить датчики «видеть» только цели и игнорировать фон.
Чаще всего используется технология фиксированного поля. В этом подходе излучатель посылает луч света, как стандартный диффузный фотоэлектрический датчик, но есть два приемника. Один сосредотачивается на том, где должна быть цель, на чувствительной точке; другой фокусируется на дальнем фоне. Компаратор определяет, обнаруживает ли приемник дальнего действия свет более высокой интенсивности, чем тот, который получает сфокусированный приемник. Если оно выше, выход остается выключенным, т. е. нет цели. Выходной сигнал будет генерироваться только тогда, когда интенсивность света сфокусированного приемника выше.
Второй метод делает шаг вперед, используя набор приемников с регулируемым расстоянием обнаружения. Сенор использует потенциометр для электрической регулировки диапазона чувствительности. Такие датчики лучше всего работают в заданных местах. Они также обеспечивают более высокие допуски для проверки мелких деталей и улучшенную способность обнаруживать цвета. Однако качество целевой поверхности, например глянцевитость, может давать разные результаты. Кроме того, объекты с высокой отражающей способностью за пределами области обнаружения, как правило, посылают достаточно света обратно на приемники для вывода, особенно когда приемники электрически отрегулированы.
Сенор использует потенциометр для электрической регулировки диапазона чувствительности. Такие датчики лучше всего работают в заданных местах. Они также обеспечивают более высокие допуски для проверки мелких деталей и улучшенную способность обнаруживать цвета. Однако качество целевой поверхности, например глянцевитость, может давать разные результаты. Кроме того, объекты с высокой отражающей способностью за пределами области обнаружения, как правило, посылают достаточно света обратно на приемники для вывода, особенно когда приемники электрически отрегулированы.
Чтобы преодолеть эти ограничения, некоторые производители сенсоров разработали технологию, известную как истинное подавление фона с помощью триангуляции.
Датчик с истинным подавлением фона испускает луч света точно так же, как и стандартные диффузные датчики с фиксированным полем. Но вместо определения интенсивности света версии с подавлением фона определяют угол, под которым луч возвращается к датчику.
Для этого датчики используют два (или более) фиксированных приемника и фокусирующую линзу. Угол принимаемого света регулируется механически, что позволяет получить крутую границу между целью и фоном, иногда всего 0,1 мм. Это более стабильный метод, когда есть отражающий фон или когда возникают проблемы с целевыми цветовыми вариациями; отражательная способность и цвет влияют на интенсивность отраженного света, но не на углы преломления, используемые датчиками подавления фона на основе триангуляции.
Угол принимаемого света регулируется механически, что позволяет получить крутую границу между целью и фоном, иногда всего 0,1 мм. Это более стабильный метод, когда есть отражающий фон или когда возникают проблемы с целевыми цветовыми вариациями; отражательная способность и цвет влияют на интенсивность отраженного света, но не на углы преломления, используемые датчиками подавления фона на основе триангуляции.
Ультразвуковые датчики
Ультразвуковые датчики приближения используют звуковые волны для обнаружения объектов, поэтому цвет и прозрачность не влияют на них (хотя некоторые экстремальные текстуры могут). Это делает их идеальными для различных применений, включая обнаружение прозрачного стекла и пластика на большом расстоянии; измерения расстояния; непрерывный контроль уровня жидкости и гранулята; и укладка бумаги, листового металла и дерева.
Наиболее распространенные конфигурации такие же, как и при фотоэлектрическом зондировании: сквозной, рефлекторный и диффузный варианты.
Ультразвуковые диффузные датчики используют звуковой преобразователь, который излучает серию звуковых импульсов, а затем отслеживает их возвращение от отражающей цели. Дальность действия может достигать 2,5 м. Чувствительность, определяемая как временное окно для циклов прослушивания по сравнению с циклами отправки или передачи, может регулироваться с помощью кнопки обучения или потенциометра. Стандартные диффузионные ультразвуковые датчики дают простой выходной сигнал присутствия/отсутствия, а также некоторые выходные аналоговые сигналы, указывающие расстояние с переменным выходным сигналом от 4 до 20 мА или от 0 до 10 В постоянного тока. Этот вывод можно легко преобразовать в полезную информацию о расстоянии.
Ультразвуковые датчики обратного отражения также обнаруживают объекты в пределах заданного расстояния обнаружения, но путем измерения времени распространения. Датчик излучает серию звуковых импульсов, которые отражаются от неподвижных противоположных отражателей (любых плоских твердых поверхностей).
