Что такое индуктивный датчик и как он работает. Какие бывают виды индуктивных датчиков. Где применяются индуктивные датчики в промышленности. Каковы преимущества и недостатки индуктивных датчиков по сравнению с другими типами.
Принцип работы индуктивного датчика
Индуктивный датчик — это бесконтактное устройство, которое реагирует на появление металлического объекта в зоне чувствительности. Как работает индуктивный датчик?
Принцип действия индуктивного датчика основан на изменении параметров электромагнитного поля при приближении металлического объекта. Основные компоненты датчика:
- Генератор высокочастотных колебаний
- Катушка индуктивности
- Электронная схема обработки сигнала
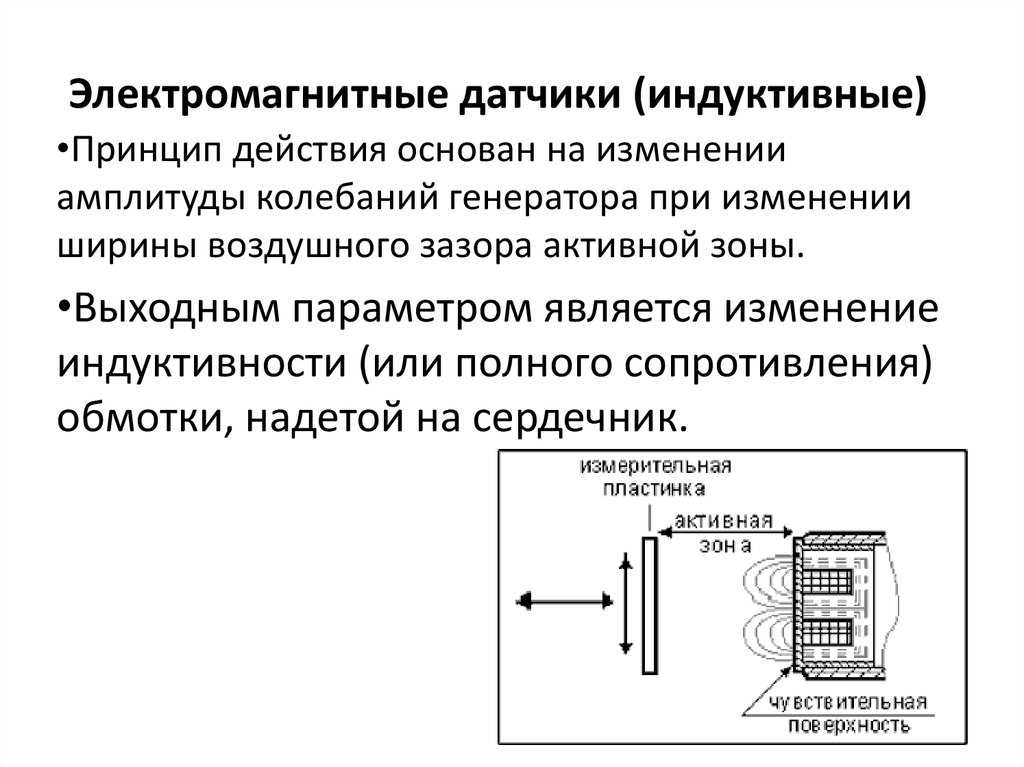
Генератор создает высокочастотное электромагнитное поле вокруг чувствительной поверхности датчика. При попадании металлического объекта в это поле в нем возникают вихревые токи. Они создают встречное магнитное поле, которое взаимодействует с полем катушки датчика. В результате происходит изменение амплитуды колебаний генератора.

Электронная схема фиксирует это изменение и формирует выходной сигнал датчика — происходит переключение выходного каскада. Таким образом, датчик обнаруживает приближение металлического объекта без непосредственного контакта с ним.
Основные характеристики индуктивных датчиков
Какие ключевые параметры определяют работу индуктивного датчика?
- Расстояние срабатывания — максимальное расстояние, на котором датчик обнаруживает металлический объект.
- Гистерезис — разница между точками включения и выключения датчика.
- Частота переключения — максимальное количество срабатываний в секунду.
- Повторяемость — способность выдавать стабильный сигнал при многократных измерениях.
- Температурный диапазон — допустимые значения рабочей температуры.
Эти характеристики определяют область применения конкретной модели индуктивного датчика. При выборе нужно учитывать требования к точности, быстродействию и условиям эксплуатации.
Типы индуктивных датчиков
Индуктивные датчики различаются по конструкции, способу монтажа и выходному сигналу. Какие существуют основные типы?
По конструкции:
- Цилиндрические — наиболее распространенный тип в виде цилиндрического корпуса.
- Прямоугольные — в форме параллелепипеда, удобны для монтажа на плоские поверхности.
- Кольцевые — с отверстием в центре для контроля объектов, проходящих сквозь датчик.
- Щелевые — с U-образной формой для контроля объектов в зазоре.
По способу монтажа:
- Утапливаемые — могут монтироваться заподлицо в металл.
- Неутапливаемые — требуют свободного пространства вокруг чувствительной поверхности.
По типу выходного сигнала:
- Дискретные — с релейным или транзисторным выходом.
- Аналоговые — выдают непрерывный сигнал, пропорциональный расстоянию до объекта.
Выбор типа датчика зависит от конкретной задачи и условий применения.
Преимущества индуктивных датчиков
Почему индуктивные датчики широко применяются в промышленности? Каковы их основные достоинства?
- Бесконтактное обнаружение металлических объектов
- Высокая частота срабатывания (до нескольких кГц)
- Нечувствительность к загрязнениям, влаге, вибрациям
- Долгий срок службы благодаря отсутствию механического износа
- Простота монтажа и настройки
- Компактные размеры
- Широкий диапазон рабочих температур
- Устойчивость к агрессивным средам (в специальном исполнении)
Эти преимущества делают индуктивные датчики надежным и универсальным решением для многих задач автоматизации.

Области применения индуктивных датчиков
Где используются индуктивные датчики в промышленности? Основные сферы применения:
- Станки с ЧПУ — контроль положения инструмента, детали
- Конвейерные линии — подсчет деталей, контроль наличия
- Робототехника — определение положения захвата, контроль перемещений
- Автоматические линии — контроль наличия заготовок, подсчет готовых изделий
- Упаковочное оборудование — контроль наличия продукции, этикеток
- Автомобильная промышленность — датчики положения педалей, коленвала и др.
- Лифтовое оборудование — контроль положения кабины, дверей
Индуктивные датчики находят применение практически во всех отраслях промышленности, где требуется надежное обнаружение металлических объектов.
Сравнение индуктивных и емкостных датчиков
Как отличаются индуктивные и емкостные датчики? Каковы их сильные и слабые стороны?
Индуктивные датчики:
Преимущества:
- Нечувствительность к неметаллическим загрязнениям
- Высокая частота срабатывания
- Устойчивость к вибрациям и ударам
Недостатки:

- Реагируют только на металлические объекты
- Меньшая дальность срабатывания по сравнению с емкостными
Емкостные датчики:
Преимущества:
- Обнаруживают как металлические, так и неметаллические объекты
- Бóльшая дальность срабатывания
Недостатки:
- Чувствительность к загрязнениям и влаге
- Меньшая частота срабатывания
- Сложнее в настройке
Выбор между индуктивными и емкостными датчиками зависит от конкретной задачи и условий эксплуатации. Индуктивные датчики предпочтительны для обнаружения металлических объектов в сложных промышленных условиях.
Особенности выбора и монтажа индуктивных датчиков
На что следует обратить внимание при выборе и установке индуктивного датчика?
- Материал объекта обнаружения — для разных металлов расстояние срабатывания отличается
- Размер объекта — должен быть не меньше активной поверхности датчика
- Расстояние срабатывания — выбирается с запасом для надежной работы
- Частота срабатывания — должна соответствовать скорости движения объектов
- Условия окружающей среды — температура, влажность, наличие агрессивных веществ
- Способ монтажа — утапливаемый или неутапливаемый
- Тип выходного сигнала — релейный, транзисторный или аналоговый
При монтаже важно соблюдать требования к расстоянию от металлических поверхностей и соседних датчиков. Правильный выбор и монтаж обеспечат надежную и долговременную работу индуктивного датчика.
Перспективы развития индуктивных датчиков
Какие тенденции наблюдаются в развитии индуктивных датчиков? Основные направления:
- Увеличение дальности срабатывания
- Повышение точности и стабильности измерений
- Миниатюризация
- Расширение функциональности (самодиагностика, настройка по интерфейсу)
- Интеграция с системами промышленного интернета вещей (IIoT)
- Разработка специализированных датчиков для конкретных отраслей
Индуктивные датчики продолжают совершенствоваться, оставаясь важным элементом промышленной автоматизации. Их развитие идет в ногу с общими тенденциями в области сенсорных технологий и промышленного интернета вещей.
Принцип работы индуктивных датчиков
Что же такое датчик в целом? Он могут быть совершенно различны и по форме, и по размеру. В целом датчик – это устройство, преобразующее воздействие физической величины в электрический сигнал, удобный для использования. Физическим воздействием может быть, например, расстояние до объекта, температура, влажность и различные другие физические величины. Индуктивный датчик – это датчик, который бесконтактно реагирует на металлический объект. Другими словами, он позволяет обнаружить металл, не соприкасаясь с ним. Датчики бывают цилиндрические, прямоугольные, плоские, уголковые, кольцевые, щелевые, и специальные, например, для контроля поворотных задвижек. Индуктивные датчики применяют для обнаружения, подсчёта, определения положения, скорости и перемещение металлических объектов.
Основной отличительной способностью индуктивных датчиков является их нечувствительность к неметаллическим объектам, исключением являются такие материалы, как ферриты. Также к важным преимуществам можно отнести простоту конструкции настройки и монтажа, стабильность и надёжность, устойчивость к загрязнениям, доступное и недорогое решение задач, возможность работать с чёрными и цветными металлами, а также сплавами. Именно поэтому индуктивные датчики нашли широкое применение для автоматизации процессов, например, в металлургии, машиностроении, добывающей промышленности, нефтяной, в том числе нефтехимии, в химической промышленности, в пищевой и других отраслях промышленности. С более конкретными применениями вы можете ознакомиться на нашем сайте https://www.sensor.ua/.
Также к важным преимуществам можно отнести простоту конструкции настройки и монтажа, стабильность и надёжность, устойчивость к загрязнениям, доступное и недорогое решение задач, возможность работать с чёрными и цветными металлами, а также сплавами. Именно поэтому индуктивные датчики нашли широкое применение для автоматизации процессов, например, в металлургии, машиностроении, добывающей промышленности, нефтяной, в том числе нефтехимии, в химической промышленности, в пищевой и других отраслях промышленности. С более конкретными применениями вы можете ознакомиться на нашем сайте https://www.sensor.ua/.
Где же был применён первый индуктивный датчик?
Историческая справка. Бесконтактный индуктивный выключатель был изобретён более 60 лет назад, в 1958 г. В Мангейме (Германия). Одним из основателей компании по производству электронных компонентов PEPPERL+FUCHS Вальтера Пёпперлем и его коллегой Вильфридом Гейлем.
Крупная химическая компания BASF нуждалась в надёжном устройстве, которое могло бы работать во взрывоопасной среде в зоне химического завода, выполняя тысячи циклов переключения при очень низких токах.
В лаборатории PEPPERL+FUCHS удалось разработать альтернативы механическим бесконтактным выключателям. Это был первый в мире датчик приближения в комплекте с первым транзисторным усилителем, с искробезопасной схемой управления.
Изобретение стало всемирно признанным стандартом в индустрии бесконтактных выключателей, а также отправной точкой в истории успеха компании. Этому событию посвящена бронзовая плита на так называемой Аллее славы Мангейма.
Принцип работы индуктивного датчика
Чтобы понять принцип работы индуктивного датчика, разберём его составляющие. Индуктивные бесконтактные выключатели состоят из следующих основных узлов: электромагнитная система, генератор, демодулятор, пороговое устройство, и выходной усилитель, электромагнитная система, её также называют элементом датчика.
Электромагнитная система является частью генератора, она представляет собой катушку индуктивности, помещённую в магнитопровод, чаще всего – это круглая ферритовая чашка.
 Чем ближе металлический объект к чувствительной поверхности датчика, и чем больше его размер, тем сильнее затухание. Демодулятор, или детектор, он же выпрямитель, преобразует изменение высокочастотных колебаний генератора в изменение постоянного напряжения.
Чем ближе металлический объект к чувствительной поверхности датчика, и чем больше его размер, тем сильнее затухание. Демодулятор, или детектор, он же выпрямитель, преобразует изменение высокочастотных колебаний генератора в изменение постоянного напряжения.Пороговое устройство сравнивает переданное электро модулятором напряжение с заранее установленным порогом срабатывания. При достижении порога формируется логический сигнал «0» или «1», т.е. выключение или включение. Таким образом пороговое устройство преобразует аналоговый сигнал детектора в цифровой выходной сигнал, ещё его называют дискретным. В качестве порогового устройства используют как транзисторные, там и микро схемные компораторов и тригеров Шмидта.
Особенностью порогового устройства является то, что пороги переключения из «0» в «1» и из «1» в «0» не совпадают. Это делается преднамеренно для повышения помехоустойчивости датчика. Данное свойство называют гистерезисом.
Выходной усилитель увеличивает мощность выходного сигнала до необходимого значения для передачи последующему устройству.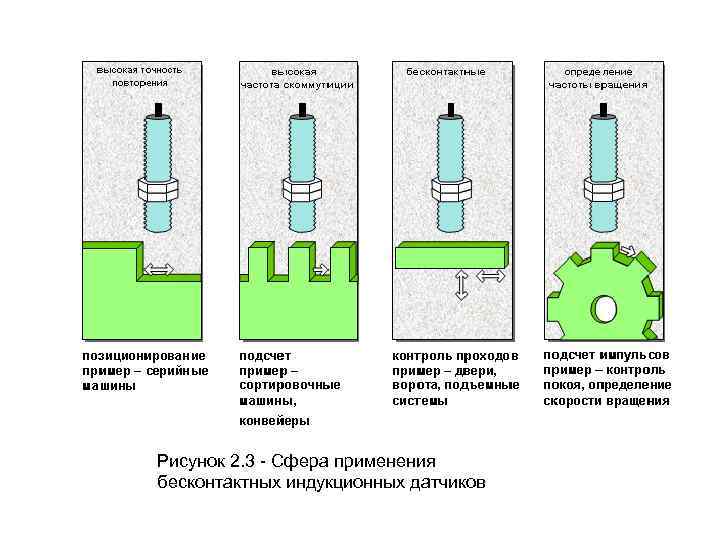 Выходной усилитель часто называют выходным ключом, т.к. он оперирует логическим значением «0» и «1». В качестве выходного ключа могут использоваться транзисторы различных типов, тиристоры (семисторы), реле электромагнитные, реле твердотельные, оптроны, интеллектуальные ключи и другие специализированные микросхемы. Электромагнитная система, генератор, демодулятор, пороговое устройство и выходной усилитель являются основой индуктивных датчиков.
Выходной усилитель часто называют выходным ключом, т.к. он оперирует логическим значением «0» и «1». В качестве выходного ключа могут использоваться транзисторы различных типов, тиристоры (семисторы), реле электромагнитные, реле твердотельные, оптроны, интеллектуальные ключи и другие специализированные микросхемы. Электромагнитная система, генератор, демодулятор, пороговое устройство и выходной усилитель являются основой индуктивных датчиков.
Подытожим вышесказанное. Принцип действия индуктивного датчика основан на изменении параметров электромагнитного поля при вхождении металлического объекта в зону чувствительности. Эти изменения фиксируются электронной схемой датчика и изменяют его состояние. В результате этого происходит коммутация выходных цепей: размыкание нормально замкнутого, замыкание нормально разомкнутого или переключение контакта.
Сравнение индуктивных и ёмкостных датчиков положения | ИНЕЛСО
Некоторые индуктивные и ёмкостные датчики выглядят очень похоже и неудивительно что инженеры-разработчики бывают сбиты с толку их сходством.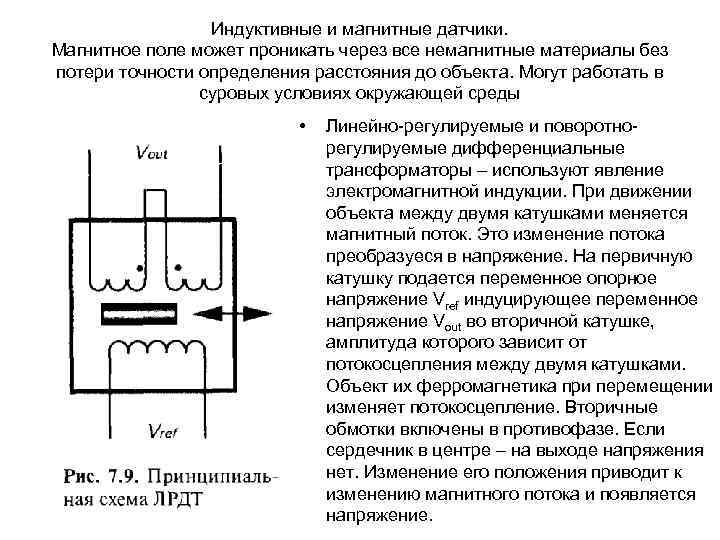 И те и другие являются бесконтактными датчиками положения и построены на основе печатных плат. Тем не менее, физические принципы, лежащие в основе каждого типа датчиков, достаточно различны. В конечном итоге на практике это означает, что эти типы датчиков подходят для различных приложений. Эта статья объясняет физические принципы каждой технологии и сравнивает соответственно сильные и слабые стороны каждого подхода.
И те и другие являются бесконтактными датчиками положения и построены на основе печатных плат. Тем не менее, физические принципы, лежащие в основе каждого типа датчиков, достаточно различны. В конечном итоге на практике это означает, что эти типы датчиков подходят для различных приложений. Эта статья объясняет физические принципы каждой технологии и сравнивает соответственно сильные и слабые стороны каждого подхода.
Автор: Mark Howard, Zettlex UK Ltd
Введение
Некоторые индуктивные и ёмкостные датчики выглядят очень похоже и неудивительно что инженеры-разработчики бывают сбиты с толку их сходством. И те и другие являются бесконтактными датчиками положения и построены на основе печатных плат. Тем не менее, физические принципы, лежащие в основе каждого типа датчиков, достаточно различны. В конечном итоге на практике это означает, что эти типы датчиков подходят для различных приложений. Эта статья объясняет физические принципы каждой технологии и сравнивает соответственно сильные и слабые стороны каждого подхода.
Принцип работы – Ёмкостные датчики
Когда исследователя Эвальда Юргена фон Клейста ударило электрическим током от лабораторного прибора в 1745 году, он внезапно понял, что есть возможность сохранять электрический заряд в больших количествах. Возможно, ненамеренно он построил первый в мире конденсатор. Конденсатор действует как накопитель электрической энергии и, как правило, состоит из двух проводящих пластин, разделённых непроводящим материалом (диэлектриком). В качестве диэлектрика обычно выступает воздух, пластик или керамика. Простая математическая модель конденсатора приведена на рис. 1.
Рис. 1 Простая модель конденсатора (С)
Диэлектрическая проницаемость ε включает в себя две составляющие — εr и ε0, где εr – это относительная магнитная проницаемость (иногда называемая диэлектрической постоянной) материала между пластинами и ε0 – электрическая постоянная (ε0 ≈ 8.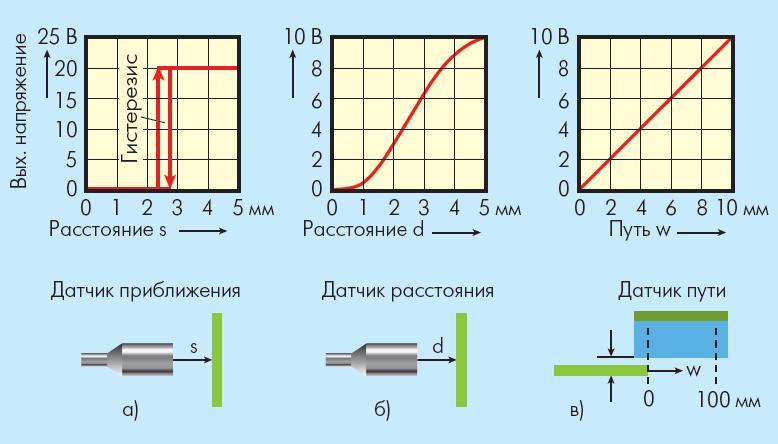 854×10−12 Ф/м).
854×10−12 Ф/м).
Многие датчики работают по ёмкостному принципу, в особенности тактильные датчики таких устройств, как планшеты и мобильные телефоны. Эти ёмкостные датчики определяют отсутствие или присутствие пальца человека и работают как альтернатива кнопочному переключателю. Присутствие пальца человека – или скорее воды в нём – приводит к изменению относительной диэлектрической проницаемости вызывающей в свою очередь изменение ёмкости.
Другой тип ёмкостного датчика – это ёмкостной датчик перемещения, который работает путём измерения изменений ёмкости происходящих из-за изменения размеров конденсатора. Как можно видеть из математической формулы на рис. 1, ёмкость как при изменении расстояния между пластинами (d) так и при изменении площади перекрытия пластин (A). Перемещение может измеряться в осевом направлении (изменение d) или в плоскости пластин. Пластины конденсатора можно с успехом изготавливать с использованием печатных плат.
Другой тип ёмкостного датчика – это ёмкостной датчик перемещения. Принцип его работы основан на измерении величины емкости, которая изменяется при изменении размеров конденсатора. Как можно видеть из математической формулы на рис. 1, ёмкость прямо пропорциональна как расстоянию между пластинами (d), так и площади перекрытия пластин (A). Перемещение может измеряться в осевом направлении (изменение d) или в плоскости пластин. Пластины конденсатора можно с успехом изготавливать с использованием печатных плат.
Принцип его работы основан на измерении величины емкости, которая изменяется при изменении размеров конденсатора. Как можно видеть из математической формулы на рис. 1, ёмкость прямо пропорциональна как расстоянию между пластинами (d), так и площади перекрытия пластин (A). Перемещение может измеряться в осевом направлении (изменение d) или в плоскости пластин. Пластины конденсатора можно с успехом изготавливать с использованием печатных плат.
Для того чтобы хранить сколько-нибудь значительный заряд, расстояние между пластинами d должно быть существенно меньше площади пластин. Величина d обычно гораздо меньше 1 мм. По этой причине такая технология хорошо подходит для измерения нагрузки и тензометрических датчиков, поскольку может давать сравнительно большие изменения сигнала при маленьком измеряемом расстоянии. Похожим образом, ёмкостные линейные или вращающиеся датчики могут быть сконструированы таким образом, что перемещение вызывает изменение площади перекрытия пластин A. Например, один комплект пластин расположен на подвижной части датчика, а другой комплект расположен на статичной части. Как только два этих комплекта смещаются относительно друг друга, площадь А изменяется.
Например, один комплект пластин расположен на подвижной части датчика, а другой комплект расположен на статичной части. Как только два этих комплекта смещаются относительно друг друга, площадь А изменяется.
К сожалению, кроме изменения размеров конденсатора, ёмкость также чувствительна и к другим факторам. Если пластины конденсатора окружены воздухом то диэлектрическая проницаемость будет изменяться из-за влияния температуры и влажности, поскольку диэлектрическая постоянная воды отличается от воздуха. Близко расположенный объект, который изменяет проницаемость окружающего пространства, тоже будет вызывать изменения ёмкости. В случае тактильного датчика, вода в пальцах вызывает местное изменение проницаемости и, соответственно, срабатывание датчика. Вот почему работа нереагирующего тактильного датчика может быть улучшена, если намочить конец пальца.
За исключением случаев, когда окружающая среда датчика может быть герметично замкнута или жёстко контролируема, ёмкостные датчики не подходят для применения в жёстких условиях окружающей среды, где есть возможность проникновения посторонних веществ или больших изменений температуры. Неудивительно, что ёмкостные датчики мало подходят для применения в условиях, где высока вероятность образования конденсата при снижении температуры.
Неудивительно, что ёмкостные датчики мало подходят для применения в условиях, где высока вероятность образования конденсата при снижении температуры.
При неизменном физическом устройстве датчика, расстояние между пластинами датчика должно поддерживаться малым относительно размеров пластин конденсатора и выдерживаться в достаточно узком допуске. Это может накладывать очень высокие требования по механической точности установки датчика в конечное изделие и может быть непрактично и неэкономично, поскольку различие тепловых расширений, вибраций или механических допусков конечного изделия могут привести к изменению расстояния между пластинами и, таким образом, к искажению измерений.
Более того ёмкостный эффект основан на хранении электрического заряда на пластинах конденсатора. Если конечное изделие, куда устанавливается датчик, может создавать электростатическое поле в процессе своего перемещения – от трения, скольжения или вращения деталей – это может искажать показания датчика. В экстремальных случаях датчик не будет работать совсем или, что хуже, электростатические возмущения будут приводить к правдоподобным, но неверным показаниям датчика. В некоторых случаях обязательно заземление компонентов конечного изделия для рассеивания заряда с пластин датчика. Часто это является необходимым в ёмкостных датчиках угла, поскольку вращение вала создаёт статический заряд из-за относительного перемещения подшипников, шестерён, шкивов и прочее.
В экстремальных случаях датчик не будет работать совсем или, что хуже, электростатические возмущения будут приводить к правдоподобным, но неверным показаниям датчика. В некоторых случаях обязательно заземление компонентов конечного изделия для рассеивания заряда с пластин датчика. Часто это является необходимым в ёмкостных датчиках угла, поскольку вращение вала создаёт статический заряд из-за относительного перемещения подшипников, шестерён, шкивов и прочее.
Принцип работы – Индуктивные датчики
В 1831 Майкл Фарадей открыл, что протекание переменного тока по одному проводнику индуцирует протекание тока в противоположном направлении во втором проводнике. С тех пор магнитная индукция стала широко использоваться как физический принцип построения датчиков для измерения положения и скорости – резольверы (СКВТ), сельсины и дифференциальный трансформатор для измерения линейных перемещений. Основы теории можно объяснить, рассматривая две катушки: передающую катушку (Tx), по которой протекает переменный ток, и приёмную катушку (Rx), в которой индуцируется ток.
Рисунок 2. Закон индукции Фарадея
Величина напряжения на приёмной обмотке пропорциональна относительным площадям, геометрии и смещению двух катушек. Однако, как и с ёмкостной технологией, на поведение катушек могут влиять и другие факторы. Одним из таких факторов является температура, но её влияние может быть нивелировано путём использования нескольких приёмных катушек и вычислении положения по отношению полученных сигналов (как в дифференциальном трансформаторе). Соответственно, даже в случае изменений температуры, её влияние на результат компенсируется, поскольку отношение сигналов является неизменным для любого положения.
В отличие от ёмкостных способов измерения, индуктивная технология гораздо менее подвержена влиянию посторонних частиц, таких как вода или грязь. Поскольку катушки могут находиться на относительно большом расстоянии друг от друга, точность установки составляет гораздо меньше проблем, и основные компоненты индуктивного датчика могут быть установлены с относительно свободными допусками.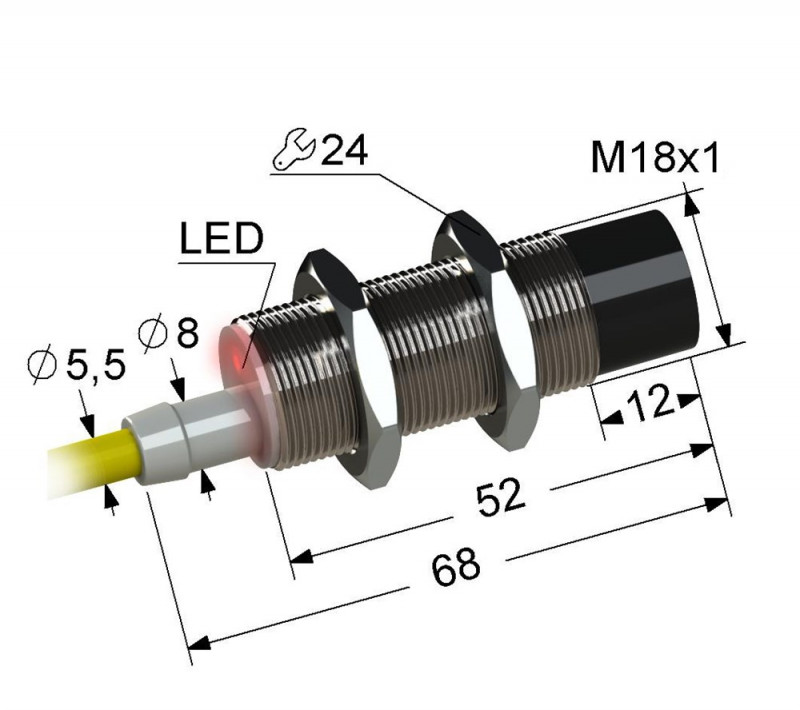 Это не только помогает снизить стоимость датчика и конечного изделия, но также позволяет использовать компоненты с защитным покрытием или заливкой, что позволяет датчикам противостоять таким внешним воздействующим факторам, как длительное погружение, сильные удары, вибрация или наличие взрывоопасной газовой или пылевой среды.
Это не только помогает снизить стоимость датчика и конечного изделия, но также позволяет использовать компоненты с защитным покрытием или заливкой, что позволяет датчикам противостоять таким внешним воздействующим факторам, как длительное погружение, сильные удары, вибрация или наличие взрывоопасной газовой или пылевой среды.
Индуктивные датчики обеспечивают надёжный, стабильный и устойчивый к внешним воздействиям подход к измерению положения и, таким образом, является предпочтительным выбором в приложениях, где жёсткие условия окружающей среды являются нормой, например, в военной технике, авиакосмической промышленности, промышленных установках и системах для нефтегазового сектора.
Несмотря на надёжность и устойчивость к внешним воздействиям, традиционные индуктивные датчики имеют ряд отрицательных сторон, которые препятствуют их более широкому распространению. В их конструкции есть проводники, намотанные на катушки, которые должны быть намотаны достаточно точно, чтобы обеспечить необходимую точность измерений положения.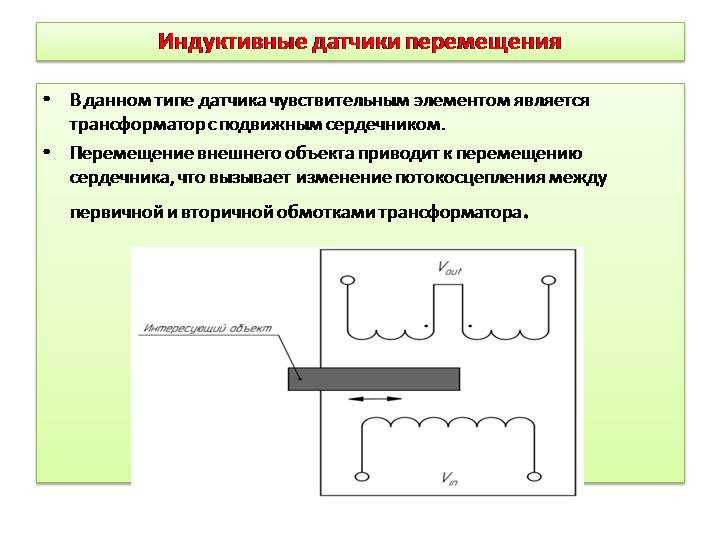 Для того, чтобы обеспечить наличие достаточно сильного электрического сигнала, необходимы обмотки с большим количеством витков. Такая конструкция с намотанной катушкой делает традиционный индуктивный датчик громоздким, тяжёлым и дорогим.
Для того, чтобы обеспечить наличие достаточно сильного электрического сигнала, необходимы обмотки с большим количеством витков. Такая конструкция с намотанной катушкой делает традиционный индуктивный датчик громоздким, тяжёлым и дорогим.
Инженеры, рассматривающие возможность применения индуктивных датчиков положения, часто задают вопрос о сложностях, связанных с электромагнитными шумами. В данном случае такая озабоченность является неуместной, если принять во внимание, что эти датчики, как резольверы, успешно используются много лет в жёсткой электромагнитной установке в корпусах электродвигателей для коммутации и управления скоростью. Что касается температурной стабильности, то устойчивость к жёстким условиям может быть достигнута при использовании дифференциального подхода, так, что электромагнитная энергия, поступающая в различные части системы, эффективно компенсирует друг друга. Вот почему индуктивные датчики, такие как резольверы и дифференциальные линейные трансформаторы, являются предпочтительным выбором в ответственных применениях, например, в гражданской авиации в течение многих лет.
Другой подход к индуктивным датчикам
Другой подход к индуктивным датчикам использует тот же физический принцип, но в нём применяются плоские конструкции на основе печатных плат вместо намотанных катушек. Именно этот подход и применяется Zettlex. Это означает, что обмотки могут быть изготовлены путём травления меди или при помощи нанесения на самые различные материалы подложки: полиэстерную плёнку, бумагу, эпоксидный слоистый пластик и даже на керамику. Такие печатные конструкции можно изготовить более точно, чем намотанные катушки. Вследствие чего достигается более высокая точность измерения при меньших затратах, размерах и массе, сохраняя в то же время все положительные свойства индуктивной технологии.
Рисунок 3. Пример грязного, но полностью работоспособного индуктивного датчика с плоской печатной обмоткой.
Датчики серии IncOders компании Zettlex – это бесконтактные устройства для прецизионного измерения угла.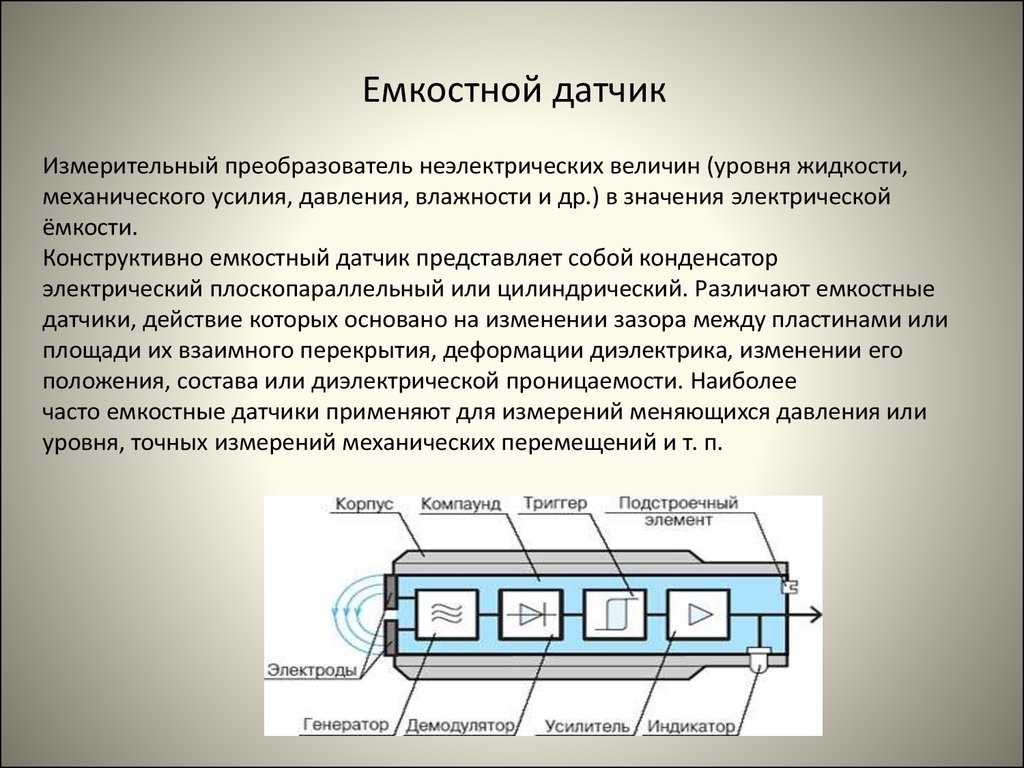 Датчик IncOder состоит из двух частей: статор и ротор, каждая из которых имеет форму плоского кольца. Большое центральное отверстие позволяет легко пропускать валы, оптические волокна, трубы и кабели, размещать токосъёмники. Индуктивные угловые энкодеры серии IncOder не требуют точной механической установки, скорее можно сказать, что ротор и статор должны быть просто привинчены в конечное изделие. Угловые энкодеры Zettlex не восприимчивы к посторонним веществам, что делает их идеально подходящими к жёстким условиям окружающей среды, где ёмкостные устройства работают ненадёжно.
Датчик IncOder состоит из двух частей: статор и ротор, каждая из которых имеет форму плоского кольца. Большое центральное отверстие позволяет легко пропускать валы, оптические волокна, трубы и кабели, размещать токосъёмники. Индуктивные угловые энкодеры серии IncOder не требуют точной механической установки, скорее можно сказать, что ротор и статор должны быть просто привинчены в конечное изделие. Угловые энкодеры Zettlex не восприимчивы к посторонним веществам, что делает их идеально подходящими к жёстким условиям окружающей среды, где ёмкостные устройства работают ненадёжно.
Заключение
Преимущества каждого из трёх подходов сведены вместе в таблице ниже. Можно сделать вывод, что из трёх приведённых подходов, нетрадиционный индуктивный подход, использующий печатные обмотки, обеспечивает наибольшее количество преимуществ.
|
Ёмкостные |
(Традиционные катушки) |
Индуктивные |
|
| Высокое разрешение |
✓ |
✓ |
✓ |
|
Высокая повторяемость |
✓ |
✓ |
✓ |
| Высокая точность |
✓ |
✓ |
✓ |
|
Устойчивость к грязи, воде или конденсату |
✓ |
✓ |
|
|
Устойчивость к электростатике |
✓ |
✓ |
|
|
Устойчивость к электромагнитным помехам |
✓ |
✓ |
✓ |
|
Низкий температурный дрейф |
✓ |
||
|
Простота установки |
? |
✓ |
|
|
Компактный |
✓ |
✓ |
|
|
Лёгкий |
✓ |
✓ |
|
|
Экономичный |
? |
✓ |
Рисунок 4. Таблица сравнительных преимуществ каждой технологии
Таблица сравнительных преимуществ каждой технологии
Смотреть энкодеры в каталоге
Принципы работы индуктивного датчикаОпределения:
НЕТ (нормально разомкнутый): Релейный выход, который разомкнут, запрещая текущий поток, когда исполнительный механизм отсутствует и закрывается, позволяя поток тока при наличии исполнительного механизма.
НЗ (нормально замкнутый): Релейный выход, который замкнут, позволяя ток течет, когда привод отсутствует и открывается, запрещая поток тока при наличии исполнительного механизма.
НПН
Выход: Транзисторный выход, переключающий общий или
отрицательное напряжение на нагрузку. Нагрузка подключается между
положительный запас и выход. Текущие потоки от
нагрузка через выход на землю, когда выход переключателя
на. Также известен как поглощение тока или отрицательное переключение.
Текущие потоки от
нагрузка через выход на землю, когда выход переключателя
на. Также известен как поглощение тока или отрицательное переключение.
ПНП Выход: Транзисторный выход, коммутирующий положительное напряжение к нагрузке. Нагрузка подключается между выходом и общим проводом. Ток течет с выхода устройства через нагрузку на заземление, когда выход переключателя включен. Также известен как текущий источник или положительное переключение.
Эксплуатация
Расстояние (Sn): Максимальное расстояние от датчика до
квадратный кусок железа (Fe 37) толщиной 1 мм со сторонами =
диаметр чувствительной поверхности, который вызовет изменение
на выходе датчика. Расстояние будет уменьшаться для других
материалы и формы. Испытания проводят при 20ºC с
подача постоянного напряжения. Это расстояние действительно включает ±
10% производственный допуск.
Испытания проводят при 20ºC с
подача постоянного напряжения. Это расстояние действительно включает ±
10% производственный допуск.
Мощность Источник питания: Диапазон напряжения питания, в котором будет работать датчик. в.
Макс. Ток переключения: Допустимая величина непрерывного тока проходить через датчик, не вызывая повреждения датчика. Он указан как максимальное значение.
Мин. Ток переключения: Это минимальное значение тока, которое должен протекать через датчик, чтобы гарантировать работу.
Макс.
Пиковый ток: Максимальный пиковый ток указывает на максимальное
текущее значение, которое датчик может выдержать за ограниченный период времени
времени.
Остаток Ток: Ток, протекающий через датчик при он в открытом состоянии.
Мощность Drain: Количество тока, необходимое для работы сенсора.
Напряжение Падение: Падение напряжения на датчике при движении максимальная загрузка.
Короткий Защита цепи: Защита от повреждения датчика если нагрузка закоротит.
Работа
Частота: Максимальное количество циклов включения/выключения, которое
устройство способно за одну секунду. Согласно EN 50010,
этот параметр измеряется динамическим методом, показанным на рис.
инжир. 1 с датчиком в положениях (а) и (б). S — операционная
расстояние, а m — диаметр датчика. Частота
дается формулой на рис. 2.
Частота
дается формулой на рис. 2.
Повторяемость (%Sn): Разница между любыми значениями рабочего расстояния измерено за 8-часовой период при температуре от 15 до 30ºC и напряжение питания с отклонением <= 5%.
Гистерезис (%Sn): Расстояние между точкой включения подход привода и точка «выключения» отступление привода. Это расстояние снижает количество ложных срабатываний. Его значение дается в процентах от рабочего расстояния или расстояние. См. рис. 3
Заподлицо
Монтаж: Для установки рядом моделей для скрытого монтажа.
см. рис. 4а. Модели без скрытого монтажа могут быть встроены в
металл по рис. 4б. рядом см. рис.
4в. Sn = рабочее расстояние.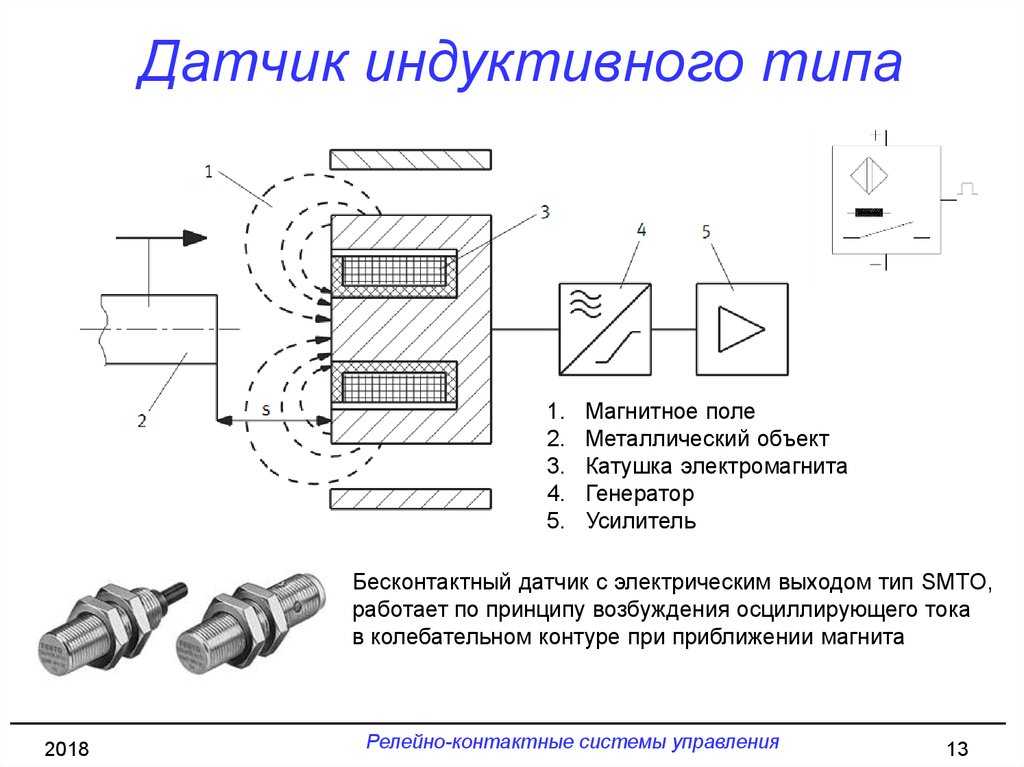
Защита
Степень: Степень защиты корпуса согласно IEC
(Международная электротехническая комиссия) выглядит следующим образом:
IP 65: Пыленепроницаемый. Защита от водяных струй.
IP 67: Пыленепроницаемый. Защита от воздействия погружения
Индуктивные датчики Принцип работы | ЭЛЬТРА ТРЕЙД
04.12.2022
Различные промышленные устройства предполагают использование различных датчиков, которые отличаются своими особенностями и принципами работы. Одним из вариантов, получивших достаточно широкое распространение, является индуктивный датчик, который активно используется в нижнем оборудовании для различных систем, обеспечивающих автоматизированное управление производственными линиями.
Встретить такие датчики можно в устройствах, отвечающих за работу пищевой и текстильной промышленности, предприятий машиностроения и многих других. Сегодня мы подробно рассмотрим типы датчиков приближения и принцип их работы.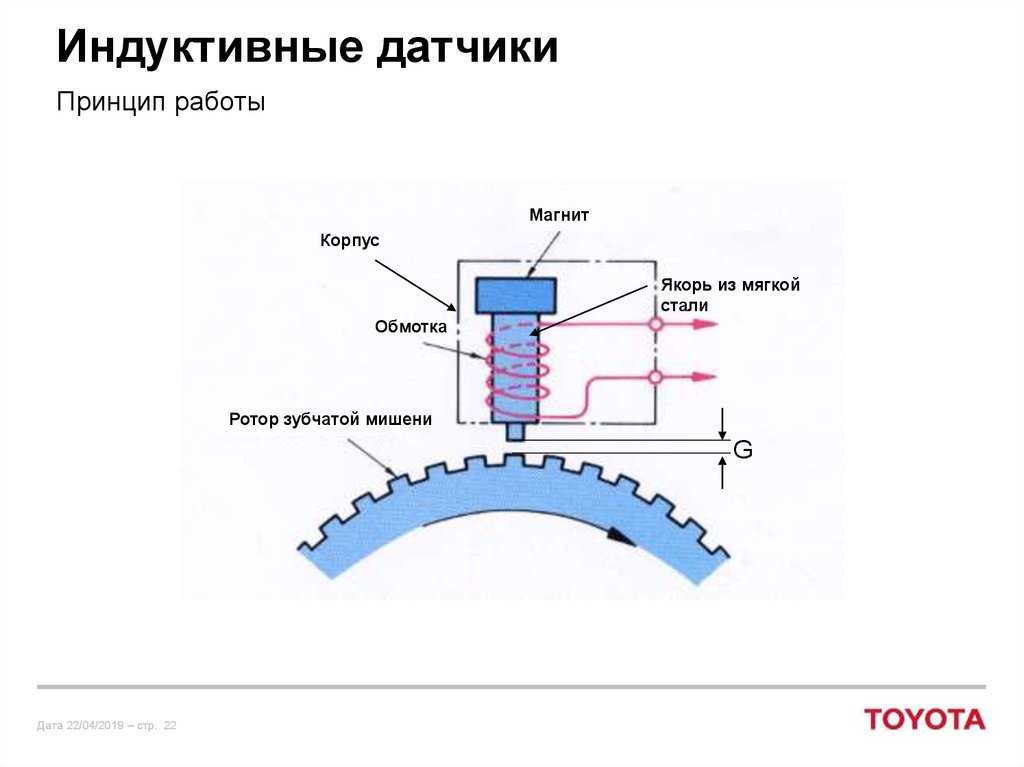
Индуктивный датчик — это устройство, действие которого основано на изменении магнитного поля в катушке индуктивности. Когда предмет из металла попадает в поле его действия, он захватывается и распознается. Схема, встроенная в устройство, производит электромагнитное излучение. При появлении в нем наведенного напряжения колебания уменьшаются. Индуктивные датчики считывают это немедленно.
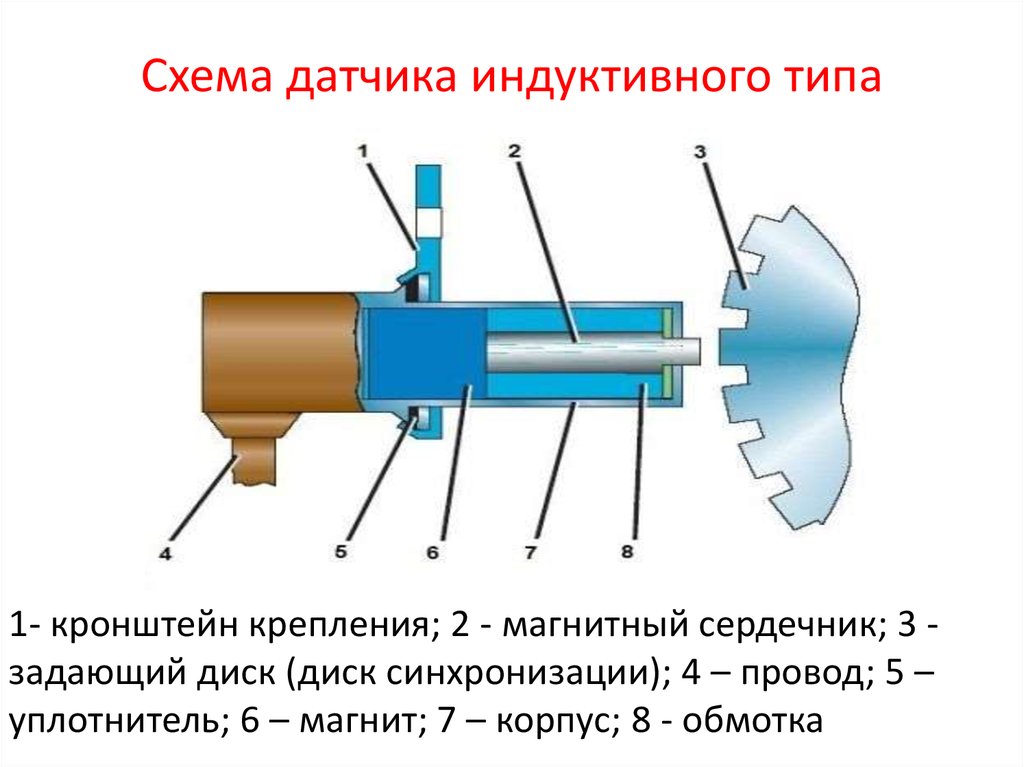
Проще говоря, индуктивный датчик — это бесконтактный выключатель, получивший свое название из-за принципа работы. Датчик имеет чувствительный элемент с магнитопроводом, разомкнутым в сторону рабочей поверхности датчика.
Как и у других устройств, у них есть свои плюсы и минусы, которые становятся заметными в процессе эксплуатации. Сенсоры стали достаточно популярными благодаря тому, что они имеют несколько важных преимуществ .
- Конструкция этих агрегатов достаточно проста, в ней нет сложных элементов, требующих специальной настройки.
 Благодаря этому датчики отличаются высокой прочностью и надежностью, редко выходят из строя и могут постоянно использоваться в производстве. Также удобно, что у них нет скользящих контактов.
Благодаря этому датчики отличаются высокой прочностью и надежностью, редко выходят из строя и могут постоянно использоваться в производстве. Также удобно, что у них нет скользящих контактов. - Особенности устройства позволяют без проблем подключать устройства к системе промышленного напряжения.
- Обладают хорошей чувствительностью, поэтому их можно использовать при работе с различными металлическими предметами.
К недостаткам можно отнести то, что в процессе эксплуатации датчики могут выдавать ошибки из-за наличия различных факторов. На них может влиять температура, а также воздействие других полей подобного типа. Поэтому для качественной работы необходимо обеспечить подходящие условия, которые бы не мешали правильному функционированию датчиков.
Где используются индуктивные датчики? Индуктивные датчики известны своей надежностью и безопасностью в суровых условиях. Это делает их лучшим выбором для военной, аэрокосмической, железнодорожной и тяжелой промышленности. Индуктивные датчики также используются в станках, машинах для текстильной промышленности, автомобильной промышленности, сборочных линиях и т. д. Они используются для обнаружения металлических деталей в сложных условиях и там, где необходимо проверять быстро движущиеся детали.
Индуктивные датчики также используются в станках, машинах для текстильной промышленности, автомобильной промышленности, сборочных линиях и т. д. Они используются для обнаружения металлических деталей в сложных условиях и там, где необходимо проверять быстро движущиеся детали.
Датчик индуктивного типа предназначен для контроля перемещения рабочего органа без непосредственного контакта с ним. Этот датчик создает электромагнитное поле в зоне чувствительности и имеет полупроводниковый переключатель.
Область применения индуктивных датчиков во многом определяется их высокой надежностью и устойчивостью к внешним факторам. На их показания и работу не влияют многие факторы окружающей среды: влага, конденсат, скопление пыли и грязи, попадание твердых частиц. Такие возможности обеспечиваются их устройством и конструктивными данными.
Какие существуют два типа индуктивных датчиков? На практике существует огромное разнообразие индуктивных датчиков, все их можно разделить на две большие категории в зависимости от вида питающего тока — переменного и постоянного тока.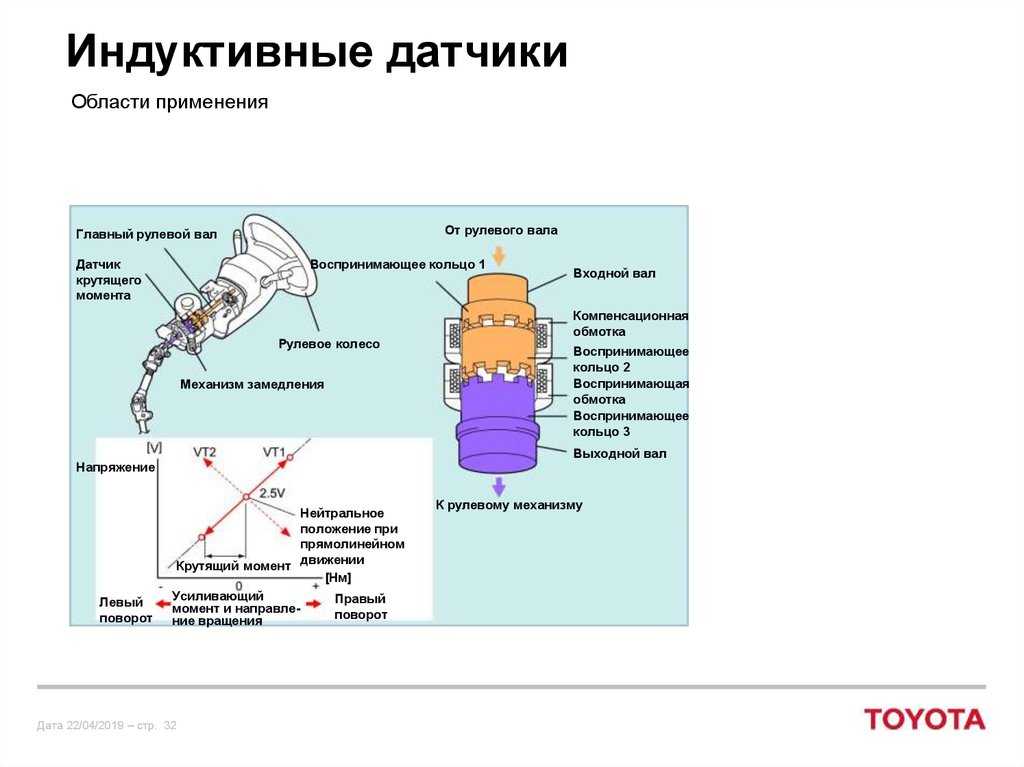 Индуктивные датчики в зависимости от состояния контактов бывают:
Индуктивные датчики в зависимости от состояния контактов бывают:
- Замыкание — при перемещении контролируемого объекта переключается во включенное положение.
- Отверстие — в случае удара индуктивный датчик переводит контакты в выключенное положение.
- Переключение — одновременно совмещает оба предыдущих варианта, за одно переключение ставит один выход включенным, второй — в выключенное положение.
По количеству измерительных цепей датчики индуктивные делятся на одинарные и дифференциальные. Первый из них имеет одну катушку и один измерительный контур. Второй тип подразумевает наличие двух датчиков, измерительные цепи которых включены противофазно для сравнения показаний. Одиночный индуктивный датчик содержит одну измерительную ветвь и одну-две дифференциальные.
В дифференциальном индуктивном датчике при изменении измеряемого параметра одновременно изменяются индуктивности двух одинаковых катушек, причем изменение происходит на одну и ту же величину, но с обратным знаком.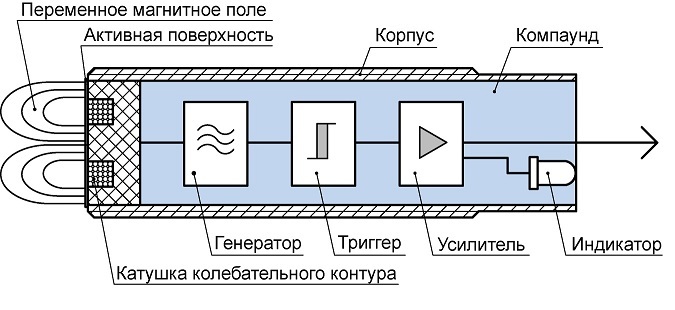
Датчики дифференциальные индуктивные представляют собой комбинацию двух нереверсивных датчиков и выполнены в виде системы, состоящей из двух магнитопроводов с общим якорем и двух катушек. Дифференциальные индуктивные датчики требуют двух отдельных источников питания.
По способу передачи данных индуктивные датчики делятся на аналоговые, электронные и цифровые. В первом случае используются те же катушки и ферромагнитные сердечники. Электронные используют триггер Шмидта вместо ферромагнетиков для получения гистерезисной составляющей. Цифровые выполнены в формате печатных плат на микросхемах. Кроме того, типы делятся по количеству выводов датчиков два, три, четыре или пять.
Принцип работы индуктивного датчика Этот тип датчика, благодаря своей внутренней структуре, имеет определенный принцип работы индуктивного датчика. В нем используется уникальный генератор, производящий колебания определенной амплитуды. При попадании в поле действия блока предмета, состоящего из металлического или ферромагнитного материала, колебания начинают изменяться, что свидетельствует о наличии предмета.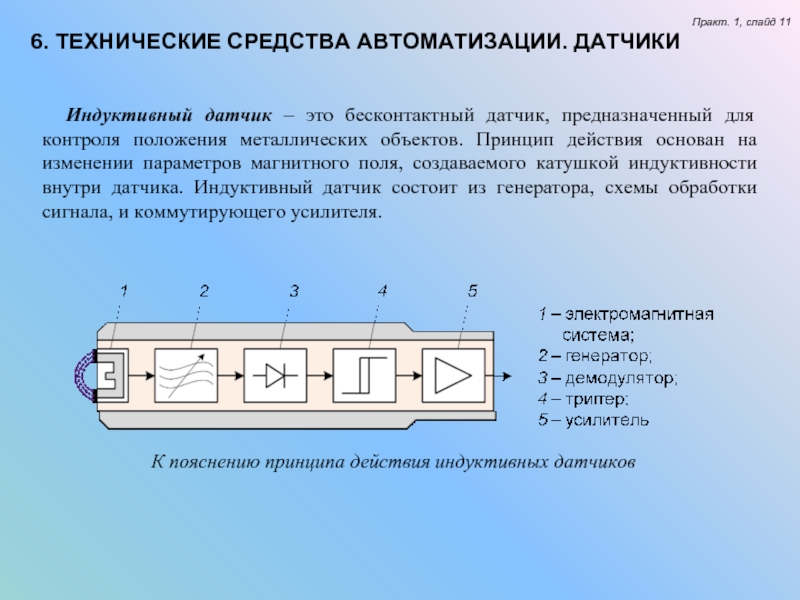 Из-за этого датчики работают только с подобными материалами и бесполезны в других случаях.
Из-за этого датчики работают только с подобными материалами и бесполезны в других случаях.
При начале работы концевой выключатель находится под напряжением, что способствует образованию магнитного поля. Именно оно воздействует на вихревые токи, которые, в свою очередь, изменяют амплитуду колебаний работающего генератора.
Результатом всех этих преобразований является выходной сигнал, который может меняться в зависимости от расстояния между работающим датчиком и исследуемым объектом. Затем с помощью специального устройства аналоговый сигнал преобразуется в логический.
Индуктивный датчик также необходим для распознавания положения металлических предметов. Это может сыграть важную роль в производстве. Если изделия следуют по линии, на которой металлические детали должны быть расположены в определенном порядке, то датчики проверят правильность такого расположения. При обнаружении ошибки устройство подаст сигнал конвейеру, и программное обеспечение предпримет дальнейшие действия для устранения проблемы.
Помимо диапазона срабатывания или чувствительности, принцип работы индуктивного датчика приближения характеризуется следующими рабочими характеристиками :
- Размер (диаметр) присоединительной резьбы, для различных образцов, принимает значения от 8 до 30 мм.
- Номинальное напряжение питания при температуре плюс 20 градусов, до 90 В постоянного тока и до 230 В переменного тока.
- Общая длина корпуса — ее значение зависит от рабочего напряжения.
- Последний показатель для разных образцов может существенно различаться.
Для чувствительной или активной зоны устройства вводится еще один параметр, называемый пределом гарантированного срабатывания. Его нижний предел равен нулю, а верхний предел составляет 80 процентов от номинального значения. Эту цифру иногда называют поправочным коэффициентом рабочего зазора.
Не менее важным показателем функциональности чувствительного устройства является количество соединительных проводов в разъеме.
