Как работает регулятор оборотов двигателя от датчика температуры. Какие функции выполняет такой регулятор. Где применяется регулирование оборотов двигателя в зависимости от температуры. Какие преимущества дает использование подобных регуляторов.
Принцип работы регулятора оборотов от датчика температуры
Регулятор оборотов двигателя от датчика температуры представляет собой устройство, которое автоматически изменяет частоту вращения вала двигателя в зависимости от температурных показателей. Принцип его работы заключается в следующем:
- Датчик температуры измеряет текущую температуру двигателя или окружающей среды
- Сигнал с датчика поступает на электронный блок управления
- Блок управления анализирует полученные данные и формирует управляющий сигнал
- Управляющий сигнал подается на исполнительное устройство (например, регулятор холостого хода)
- Исполнительное устройство изменяет обороты двигателя в соответствии с заданным алгоритмом
Таким образом, регулятор автоматически поддерживает оптимальные обороты двигателя при различных температурных режимах работы.
Основные функции регулятора оборотов от датчика температуры
Регулятор оборотов двигателя от датчика температуры выполняет следующие важные функции:
- Повышение оборотов холостого хода при запуске холодного двигателя для его быстрого прогрева
- Снижение оборотов по мере прогрева двигателя до рабочей температуры
- Поддержание стабильных оборотов холостого хода при различных температурах окружающей среды
- Компенсация изменения вязкости масла при разных температурах
- Оптимизация работы двигателя для снижения расхода топлива
Области применения регуляторов оборотов от датчика температуры
Регуляторы оборотов двигателя, работающие по сигналам от датчиков температуры, широко применяются в следующих областях:
- Автомобильные двигатели внутреннего сгорания
- Системы охлаждения и вентиляции
- Промышленные электродвигатели
- Бытовая техника (холодильники, кондиционеры)
- Отопительное оборудование
Особенно эффективно использование таких регуляторов в системах, работающих в широком диапазоне температур окружающей среды.
Преимущества использования регуляторов оборотов от датчика температуры
Применение регуляторов оборотов двигателя, работающих по сигналам от датчиков температуры, дает ряд важных преимуществ:
- Повышение топливной экономичности двигателя
- Снижение вредных выбросов в атмосферу
- Увеличение ресурса работы двигателя
- Улучшение динамических характеристик
- Оптимизация работы двигателя в широком диапазоне температур
Все это делает регуляторы оборотов от датчика температуры эффективным инструментом для повышения эксплуатационных характеристик различных типов двигателей и оборудования.
Типы датчиков температуры, используемых в регуляторах оборотов
В регуляторах оборотов двигателя могут применяться различные типы датчиков температуры:
- Термисторы — полупроводниковые датчики, меняющие сопротивление при изменении температуры
- Термопары — датчики, генерирующие термоЭДС при нагреве
- Термометры сопротивления — датчики на основе металлических проводников
- Полупроводниковые датчики с цифровым выходом
Выбор конкретного типа датчика зависит от требуемой точности, диапазона измерений, условий эксплуатации и стоимости.

Настройка и калибровка регуляторов оборотов от датчика температуры
Для корректной работы регулятора оборотов двигателя от датчика температуры необходимо выполнить его настройку и калибровку. Этот процесс включает следующие этапы:
- Определение оптимальных оборотов двигателя для различных температурных режимов
- Программирование блока управления регулятора с заданием необходимых параметров
- Калибровка датчика температуры для обеспечения точности измерений
- Тестирование работы регулятора во всем диапазоне рабочих температур
- Корректировка настроек при необходимости
Правильная настройка и калибровка позволяют обеспечить оптимальную работу регулятора в конкретных условиях эксплуатации.
Возможные неисправности регуляторов оборотов от датчика температуры
При эксплуатации регуляторов оборотов двигателя от датчика температуры могут возникать следующие неисправности:
- Выход из строя датчика температуры
- Обрыв или короткое замыкание в цепи датчика
- Неисправность электронного блока управления
- Сбой в программном обеспечении регулятора
- Механические повреждения исполнительного устройства
Для диагностики и устранения неисправностей необходимо использовать специальное диагностическое оборудование и следовать рекомендациям производителя регулятора.
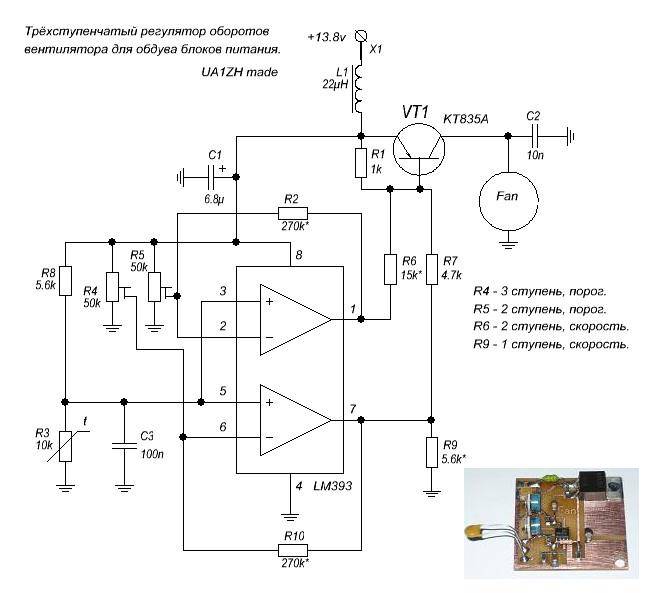
РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ 12 В
Во многих электронных схемах используются системы активного охлаждения с вентиляторами. Чаще всего их моторы управляются микроконтроллером или другой специализированной микросхемой, а скорость вращения регулируется с помощью ШИМ. Такое решение характеризуется не слишком хорошей плавностью работы, может привести к нестабильной работе вентилятора, а кроме того, создает много помех.
Для потребностей высококачественной аудиотехники разработан аналоговый регулятор оборотов вентилятора. Схема пригодится при строительстве усилителей НЧ с активной системой охлаждения и позволяет выполнить плавную регулировку оборотов вентиляторов в зависимости от температуры. Производительность и мощность зависит в основном от выходного транзистора, тесты проводились с выходными токами до 2 А, что позволяет подключить даже несколько больших вентиляторов на 12 В. Естественно можно применить это устройство и для управления обычными моторами постоянного тока, при необходимости повысив питающее напряжение.
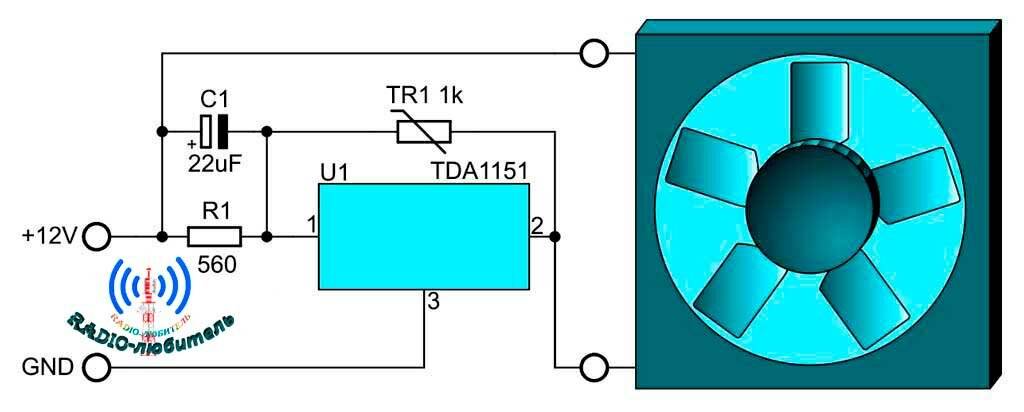
Принципиальная схема регулятора оборотов мотора
Схема состоит из двух частей: дифференциального усилителя и стабилизатора напряжения. Первая часть занимается измерением температуры и обеспечивает напряжение, пропорциональное температуре, когда она превышает установленный порог. Это напряжение является управляющим для стабилизатора напряжения, выход которого контролирует питание вентиляторов.
Схема регулятора оборотов электродвигателя постоянного тока приведена на рисунке. Основа — компаратор U2 (LM393), работающий в этой конфигурации как обычный операционный усилитель. Первая его часть U2A работает как усилитель дифференциальный, чьи условия работы определяют резисторы R4-R5 (47k) и R6-R7 (220k). Конденсатор C10 (22pF) улучшает стабильность усилителя, а R12 (10k) подтягивает выход компаратора к плюсу питания.
На один из входов дифференциального усилителя подается напряжение, которое образуется через делитель, состоящий из R2 (6,8k), R3 (680 Ом) и PR1 (500 Ом), и фильтруется с помощью C4 (100nF). На второй вход этого усилителя поступает напряжение с датчика температуры, который в данном случае один из разъемов транзистора T1 (BD139), поляризованный небольшим током с помощью R1 (6,8k).
Конденсатор C2 (100nF) был добавлен, чтобы фильтровать напряжение с датчика температуры. Полярность датчика и делителя опорного напряжения задает стабилизатор U1 (78L05) вместе с конденсаторами C1 (1000uF/16V), C3 (100nF) и C5 (47uF/25V), предоставляя стабилизированное напряжение 5 В.
Компаратор U2B работает как классический усилитель ошибки. Он сравнивает напряжение с выхода дифференциального усилителя с выходным напряжением с помощью цепочки R10 (3,3k), R11 (47 Ом) и PR2 (200 Ом). Исполнительным элементом стабилизатора является транзистор T2 (IRF5305), база которого управляется делителем R8 (10k) и R9 (5,1k).
Конденсатор C6 (1uF) и C7 (22pF) и C9 (10nF) улучшают стабильность петли обратной связи. Конденсатор C8 (1000uF/16V) фильтрует выходное напряжение, он имеет значительное влияние на стабильность системы. Разъемом выхода — AR2 (TB2), а разъем питания — AR1 (TB2).
Благодаря применению выходного транзистора с низким сопротивлением в открытом состоянии, схема обладает очень малым падением напряжения — порядка 50 мВ при выходном токе 1 А, что не требует блока питания с более высоким напряжением для управления вентиляторами, работающие на 12 В.
В большинстве случаев в роли U2 можно применить популярный операционный усилитель LM358, правда несколько ухудшив выходные параметры.
Сборка регулятора
Монтаж следует начинать с установки двух перемычек, затем должны быть установлены все резисторы и мелкие керамические конденсаторы.
Далее устанавливаем переменные резисторы, стабилизатор и все разъемы, заканчивая большими электролитическими конденсаторами. Транзисторы T1 и T2 оставляем на самый конец.
В большинстве случаев оба эти элемента будут установлены снизу платы на ножках, изогнутых под углом 90 градусов. Такая укладка позволит их прикрутить непосредственно к радиатору (обязательно использовать изоляционные прокладки).
Форум
Форум по обсуждению материала РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ 12 В
Автоматический регулятор оборотов для мини-дрели.
При работе с выводными компонентами приходится изготавливать печатные платы с отверстиями, это, пожалуй, одна из самых приятных частей работы, и, казалось бы, самая простая. Однако, очень часто при работе микродрель приходится то отложить в сторону, то снова взять ее в руки, чтобы продолжить работу. Микродрель лежащая на столе во включенном состоянии создает довольно много шума из-за вибрации, к тому же она может слететь со стола, а зачастую и двигатели прилично нагреваются при работе на полную мощность. Опять же, из-за вибрации довольно трудно точно прицеливаться при засверливании отверстия и нередко бывает так, что сверло может соскользнуть с платы и проделать борозду на соседних дорожках.
Решение проблемы напрашивается следующее: нужно сделать так, чтобы микродрель имела маленькие обороты на холостом режиме, а при нагрузке частота вращения сверла увеличивалась. Таким образом, нужно реализовать следующий алгоритм работы: без нагрузки – патрон крутится медленно, свело попало в кернение — обороты возросли, прошло насквозь – обороты снова упали. Самое главное, что это очень удобно, во-вторых двигатель работает в облегченном режиме, с меньшим нагревом и износом щеток.
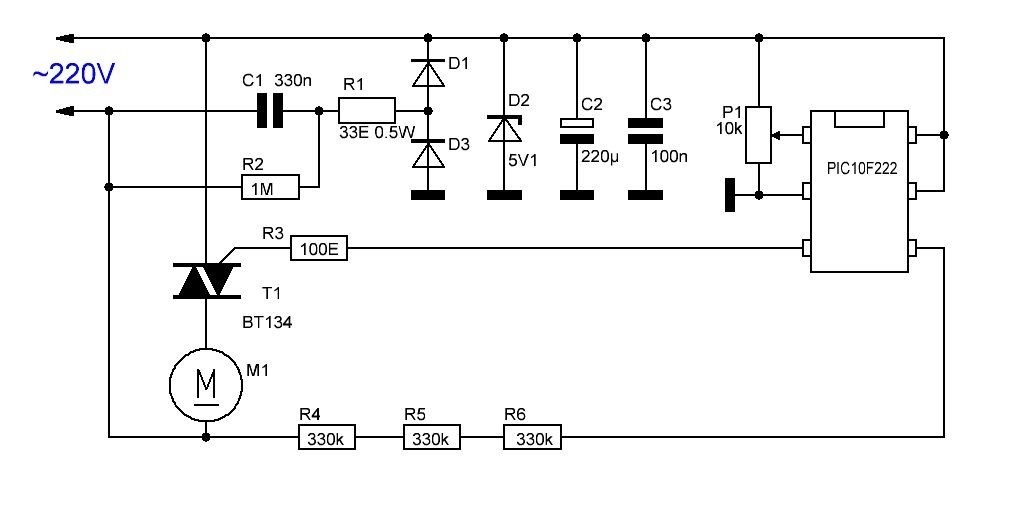
Ниже приведена схема такого автоматического регулятора оборотов, обнаруженная в интернете и немного доработанная для расширения функционала:
После сборки и тестирования выяснилось, что под каждый двигатель приходится подбирать новые номиналы элементов, что совершенно неудобно. Также добавили разрядный резистор (R4) для конденсатора, т.к. выяснилось, что после отключения питания, а особенно при отключённой нагрузке, он разряжается довольно долго. Изменённая схема пробрела следующий вид:
Автоматический регулятор оборотов работает следующим образом — на холостых оборотах сверло вращается со скоростью 15-20 оборотов/мин., как только сверло касается заготовки для сверления, обороты двигателя увеличиваются до максимальных. Когда отверстие просверлено и нагрузка на двигатель ослабевает, обороты вновь падают до 15-20 оборотов/мин.
Собранное устройство выглядит следующим образом:
На вход подается напряжение от 12 до 35 вольт, к выходу подключается микродрель, после чего резистором R3 выставляется требуемая частота вращения на холостом ходу и можно приступать к работе. Здесь следует отметить, что для разных двигателей регулировка будет отличаться, т.к. в нашей версии схемы был упразднен резистор, который требовалось подбирать для установки порога увеличения оборотов.
Транзистор Т1 желательно размещать на радиаторе, т.к. при использовании двигателя большой мощности он может довольно сильно нагреваться.
Ёмкость конденсатора C1 влияет на время задержки включения и отключения высоких оборотов и требует увеличения если двигатель работает рывками.
Самым важным в схеме является номинал резистора R1, от него зависит чувствительность схемы к нагрузке и общая стабильность работы, к тому же через него протекает почти весь ток, потребляемый двигателем, поэтому он должен быть достаточно мощным. В нашем случае мы сделали его составным, из двух одноваттных резисторов.
Печатная плата регулятора имеет размеры 40 х 30 мм и выглядит следующим образом:
Скачать рисунок платы в формате PDF для ЛУТ: «скачать» (При печати указывайте масштаб 100%).
Весь процесс изготовления и сборки регулятора для минидрели занимает около часа.
После травления платы и очистки дорожек от защитного покрытия (фоторезиста или тонера, в зависимости от выбранного метода изготовления платы) необходимо засверлить в плате отверстия под компоненты (обратите внимание на размеры выводов различных элементов).
Сверлить отверстия рекомендуется со стороны дорожек, а для того, чтобы компоненты было легче устанавливать – со стороны деталей все отверстия необходимо немного раззенковать сверлом большего диаметра (3-4 мм).
Затем дорожки и контактные площадки покрываются флюсом, что очень удобно делать при помощи флюс-аппликатора, при этом достаточно флюса СКФ или раствора канифоли в спирте.
После лужения платы расставляем и припаиваем компоненты. Автоматический регулятор оборотов для микродрели готов к эксплуатации.
Данное устройство было проверено с несколькими видами двигателей, парой китайских различной мощности, и парой отечественных, серии ДПР и ДПМ – со всеми типами двигателей регулятор работает корректно после подстройки переменным резистором. Важным условием является чтобы он был в хорошем состоянии, т.к. плохой контакт щеток с коллектором двигателя может вызывать странное поведение схемы и работу двигателя рывками. На двигатель желательно установить искрогасящие конденсаторы и установить диод для защиты схемы от обратного тока при отключении питания.
Список компонентов для автоматического регулятора оборотов
Фото
Наименование
Кол-во
Наличие
Цена
1
Нет в наличии
7,26
2
Нет в наличии
6,89
Modbus-регуляторы для вентиляторных конвекторов, систем отопления и кондиционирования. Шинные модули и датчики температуры
Сортирвать по названиюпо артикулу
- Описание
- Техническая документация
Арт.: MBR010
MBR010 — Коммуникационные Modbus-регуляторы THERMASREG® служат для регулирования температуры с использованием систем кондиционирования и климат-конвекторов (для устройств с 3 и менее вентиляторными ступенями, для вентилей отопления и охлаждения).
Цены на это наименование доступны по запросу.
подробнее Заказать
- Описание
- Техническая документация
Арт.: MBR011
MBR011 — Коммуникационные Modbus—регуляторы THERMASREG® служат для регулирования температуры с использованием систем кондиционирования и климат-конвекторов (для устройств с 3 и менее вентиляторными ступенями, для вентилей отопления и охлаждения).
Цены на это наименование доступны по запросу.
подробнее Заказать
- Описание
- Техническая документация
Арт.: FM010
FM010 — Встраиваемый коммуникационный шинный модуль к Modbus-регулятору THERMASREG®.
Цены на это наименование доступны по запросу.
подробнее Заказать
- Описание
- Техническая документация
Арт.: MBR100
Регулятор MBR100 предназначен для измерения температуры воздуха в помещениях, передачи данных измерений элементам автоматизированных систем управления и регулирования температуры при помощи систем охлаждения или отопления.
Цены на это наименование доступны по запросу.
подробнее Заказать
- Описание
- Техническая документация
Арт.: MBR200
MBR200 — коммуникационный Modbus-регулятор THERMASREG®, служит для контроля, передачи данных и регулирования температуры в помещении с использованием систем отопления и охлаждения. Оснащается большим дисплеем, отличающимся легкой читаемостью, и управляется одной ручкой-кнопкой (нажатие-поворот-нажатие).
Цены на это наименование доступны по запросу.
подробнее Заказать
- Описание
- Техническая документация
Арт.: MBR300
MBR300 — коммуникационный Modbus-регулятор THERMASREG®, служит для контроля, передачи данных и регулирования температуры в помещении с использованием систем отопления и охлаждения. Оснащается большим дисплеем, отличающимся легкой читаемостью, и управляется одной ручкой-кнопкой (нажатие-поворот-нажатие).
Цены на это наименование доступны по запросу.
подробнее Заказать
Температурные контроллеры. Терморегуляторы
Температурные контроллеры предназначены для регулирования температуры в рамках автоматических систем управления различными производственными процессами.
Выбрать и купить термоконтроллер вы можете в интернет-магазине …
Основное распространение получили температурные контроллеры на базе ПИД-регуляторов. Контроллеры отличаются вариантами регулирования параметров и особенностями работы.
Современные модели температурных контроллеров с ПИД-регуляторами снабжены светодиодной индикацией, выполняющей различные функции:
- отображение текущего значения измеряемого параметра,
- отображение заданного в настройках значения,
- отклонение текущего значения от заданного в абсолютных числах или процентах,
- индикация состояний работы прибора,
- аварийная сигнализация.
Большая часть моделей терморегуляторов позволяет встраивать контроллеры в шкаф управления или монтировать на DIN-рейку. Для простоты монтажа некоторые варианты имеют бескорпусные модификации.
Область применения контроллеров температуры
Температурные контроллеры применяются практически во всех современных отраслях промышленности для контроля различных процессов температурной обработки:
- системы горячего водоснабжения, отопления, вентиляции, кондиционирования зданий и помещений,
- сушильные камеры, промышленные печи различного назначения,
- холодильные установки,
- системы пожароохранной и аварийной сигнализации,
- термическая обработка различных материалов: термопластоавтоматы, вулканизаторы, сварочное оборудование и многое другое.
Многие контроллеры помимо термодатчиков могут работать с другими видами измерительных приборов: датчиками давления, расхода, влагомерами, датчиками тока, датчиками положения задвижки, углового положения и т.д.
Это позволяет применять контроллеры температуры в металлургической отрасли, машиностроении, производстве станков и оборудования, пищевой промышленности, сельском хозяйстве, сфере ЖКХ, добывающей и перерабатывающей промышленности.
Назначение контроллеров температуры
Терморегуляторы обеспечивают различные температурные процессы: нагревание, охлаждение, поддержание заданного параметра и т.д. Температурные контроллеры встраиваются в автоматические управляющие системы и осуществляют регулирование заданных параметров с помощью управления исполнительным оборудованием.
Также контроллеры могут работать с другими видами датчиков, например, давления, тока, влажности и другими, для управления соответствующими параметрами технологических процессов.
Преимущества температурных контроллеров
Современные температурные контроллеры в зависимости от конкретной модели могут иметь различные преимущества:
- одновременное измерение и регулирование уровня температуры,
- высокая точность работы,
- различные варианты управления параметрами, включая ПИД-регулятор,
- широкий модельный ряд,
- возможность многоканального измерения,
- одновременное управление процессами нагревания и охлаждения,
- управление различными параметрами производственных процессов: давлением, расходом, свойствами тока, микроклиматом и т.д.
Возможные недостатки работы с термоконтроллерами
Основным недостатком температурных контроллеров является точность измерения и регулирования. На этот показатель влияет используемый датчик температуры, а также возможности самого прибора. Для процессов, требующих высокой точности управления, следует выбирать модели с минимальной погрешностью и возможностью работы с высокоточными датчиками.
Принцип работы температурных контроллеров
Принцип работы температурного контроллера заключается в получении входного сигнала с датчика температуры и формировании сигнала управления оборудованием на базе величины полученного значения измеряемого параметра. В зависимости от особенностей работы выходного сигнала, управляющий сигнал может формироваться различным способом.
Сигнал управления температурного контроллера с ПИД-регулятором формируется на базе полного или частичного пропорционально-интегро-дифференцирующего регулирования. При этом происходит расчет трех величин:
- пропорциональной – отклонением текущего результата измерения от заданного значения,
- интегрирующей – интеграла по времени от разницы значений,
- дифференцирующей – скорости изменения разницы значений.
Выходной сигнал при ПИД-регулировании включает в себя сумму всех трех величин. Частичное ПИД-регулирование может включать в себя только одну или две величины:
- пропорциональное регулирование,
- пропорционально-интегрирующее регулирование,
- пропорционально-дифференцирующее регулирование.
Современные температурные контроллеры включают в себя функции автоматического регулятора по заданной программе из нескольких шагов.
Выбрать и купить температурные контроллеры вы можете в интернет-магазине РусАвтоматизация …
»
Ошибка, запрос не может выполниться:
ERROR: SELECT items.*, users.login AS author, categories.title AS category,
categories.seo_name AS category_seo_name, iblocks.iblock_name
FROM `pa_iblock_items` AS items
LEFT JOIN `pa_users` AS users ON users.id = items.user_id
LEFT JOIN `pa_iblock_categories` AS categories ON categories.id = items.category_id
LEFT JOIN `pa_iblocks` AS iblocks ON iblocks.id = items.iblock_id
WHERE items.seo_name = ‘UNKNOWN_PLACEHOLDER_sef_rewrite=1’ ORDER BY id DESC LIMIT 0, 1000Ошибка, запрос не может выполниться:
ERROR: SELECT items.*, users.login AS author, categories.title AS category,
categories.seo_name AS category_seo_name, iblocks.iblock_name
FROM `pa_iblock_items` AS items
LEFT JOIN `pa_users` AS users ON users.id = items.user_id
LEFT JOIN `pa_iblock_categories` AS categories ON categories.id = items.category_id
LEFT JOIN `pa_iblocks` AS iblocks ON iblocks.id = items.iblock_id
WHERE items.seo_old_name = ‘UNKNOWN_PLACEHOLDER_sef_rewrite=1’ ORDER BY id DESC LIMIT 0, 1000Ошибка, запрос не может выполниться:
ERROR: SELECT * FROM `pa_iblock_categories` WHERE id = UNKNOWN_PLACEHOLDER_0Ошибка, запрос не может выполниться:
SELECT COUNT(*) FROM `pa_comments`
WHERE item_type = ‘iblock’ AND ERROR: item_id = UNKNOWN_PLACEHOLDER_0Ошибка, запрос не может выполниться:
SELECT items.*, users.login AS author, categories.title AS category,
categories.seo_name AS category_seo_name, iblocks.iblock_name
FROM `pa_iblock_items` AS items
LEFT JOIN `pa_users` AS users ON users.id = items.user_id
LEFT JOIN `pa_iblock_categories` AS categories ON categories.id = items.category_id
LEFT JOIN `pa_iblocks` AS iblocks ON iblocks.id = items.iblock_id
WHERE ERROR: items.iblock_id = UNKNOWN_PLACEHOLDER_0 AND ERROR: items.category_id = UNKNOWN_PLACEHOLDER_0 AND ERROR: items.id != UNKNOWN_PLACEHOLDER_0 ORDER BY added_dt desc LIMIT 0, 5ttp://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd»>
Вопросы и ответы
Подключение датчика АДМ-100 для ER-T:
клемму «+» АДМ соедините с клеммой «Р24» ПЧ;
клемму «-» АДМ соедините с клеммой «FI» ПЧ.
Настройки для ER-T:
b.02=4 //Способ задания частоты — ПИД-регулятор
b.04=60.0 //Время разгона
b.05=60.0 //Время торможения
С.01=1 //уставка ПИД по параметру С.05
С.02=1 //ОС ПИД по входу FI
С.04=16.0 //предел измерения датчика АДМ-100-1,6 в кгс/см2
С.05=14.0 //уставка в кгс/см2
С.09 и С.10 подлежат корректировке при ПНР для обеспечения качества регулирования давления
Перед настройкой ПИД-регулятора рекомендуется выполнить пуск в ручном режиме. При открытом расходе насоса проверьте его работу, вручную задавая частоту от 15 до 50 Гц с панели ПЧ. Если насос не выходит на макс. частоту 50Гц, выберите тип модуляции b.10=OPt, выберите d.01 равным ном. току ПЧ и увеличьте номинальное напряжение d.02 до 400…420В.
Подключение датчика АДМ-100 для E-9:
клемму «+» АДМ соедините с клеммой «Р24» ПЧ;
клемму «-» АДМ соедините с клеммой «IFA» ПЧ;
установите перемычку между клеммами «GND» и «COM» ПЧ.
Настройки для E-9:
F194=3, F193=1, F003=0, F004=2, F110=0, F111=4, F113=2
F114=пределу измерения АДМ-100 (для АДМ-100.3-1,6 установите F114=16,0 кгс/см2 )
F116=70,0 (к-т пропорциональности, требует подстройки для улучшения качества регулирования)
F117=8,0 (время интегрирования, требует подстройки для улучшения качества регулирования)
F119=0, F120=100
Задание давления производится потенциометром на панели управления ПЧ. Кнопками SET и ESC переключаются отображаемые параметры на верхнем и нижнем табло панели соответственно. При мигающем индикаторе MPa отображается заданное давление, при горящем постоянно индикаторе MPa отображается давление, полученное от датчика.
При длине кабеля более 30 м, например, в случае с погружным насосом, на выходе ПЧ необходимо установить моторный дроссель серии EA-OC с номинальным током соответственно току двигателя.
Датчик температуры холостого хода | Датчики температуры
Регулятор холостого хода
(РХХ 2112-1148300-02)
Регулятор холостого хода (см. Фото-1) является устройством, которое необходимо в системе для стабилизации оборотов холостого хода двигателя. РХХ представляет из себя шаговый электродвигатель с подпружиненной конусной иглой. Во время работы двигателя на холостом ходу, за счет изменения проходного сечения дополнительного канала подачи воздуха в обход закрытой заслонки дросселя, в двигатель поступает, необходимое для его стабильной работы, количество воздуха.
Этот воздух учитывается датчиком массового расхода воздуха (ДМРВ) и, в соответствии с его количеством, контроллер осуществляет подачу топлива в двигатель через топливные форсунки. По датчику положения коленчатого вала (ДПКВ) контроллер отслеживает количество оборотов двигателя и в соответствии с режимом работы двигателя управляет РХХ,таким образом добавляя или снижая подачу воздуха в обход закрытой дроссельной заслонки (см. Фото-2 и Фото-3). На прогретом до рабочей температуры двигателе контроллер поддерживает обороты холостого хода. Если же двигатель не прогрет, контроллер за счет РХХ увеличивает обороты и, таким образом, обеспечивает прогрев двигателя на повышенных оборотах коленвала. Данный режим работы двигателя позволяет начинать движение автомобиля сразу и не прогревая двигатель.
Регулятор холостого хода установлен на корпусе дроссельной заслонки (см. Фото-4) и крепится к нему двумя винтами. К сожалению, на некоторых автомобилях головки этих крепежных винтов могут быть рассверлены или винты посажены на лак, что может значительно усложнить демонтаж РХХ для его замены или прочистки воздушного канала.
В таких случаях редко удается обойтись без демонтажа всего корпуса дроссельной заслонки.
РХХ является исполнительным устройством и его самодиагностика в системе не предусмотрена. Поэтому при неисправностях регулятора холостого хода лампа «CHECK ENGINE» не загорается.
Симптомы неисправностей РХХ во многом схожи с неисправностями ДПДЗ (датчика положения дроссельной заслонки), но во втором случае чаще всего на неисправность ДПДЗ явно указывает лампа «CHECK ENGINE».
К неисправностям регулятора холостого хода можно отнести следующие симптомы: неустойчивые обороты двигателя на холостом ходу, самопроизвольное повышение или снижение оборотов двигателя, остановка работы двигателя при выключении передачи, отсутствие повышенных оборотов при запуске холодного двигателя, снижение оборотов холостого хода двигателя при включении нагрузки (фары, печка и т.д.).
Для демонтажа регулятора холостого хода необходимо при выключенном зажигании отключить его четырехконтактный разъем и отвернуть два крепежных винта. Монтаж РХХ производят в обратной последовательности, но предварительно проверив расстояние от фланца до конечной точки конусной иглы, которое должно быть 23 мм. Кроме того, уплотнительное кольцо на фланце следует смазать моторным маслом.
none Опубликована: 2002 г. 0 0
Повышенные обороты холостого хода — Энциклопедия японских машин
С наступлением зимы на многих автостоянках можно,наверное, услышать такой разговор :-Вчера вот поставил машину на стоянку, все было нормально. А сегодня утром завел – обороты не скидывает. Держит более тысячи…
Что примечательно — наиболее часто эта проблема возникает именно с наступлением холодов. И можно почти уверенно сказать, что не надо искать причину в неисправности «механической части». Причина в другом и лежит она почти на поверхности.
Электронный блок управления ( ECU ) в своей работе учитывает показания множества датчиков, но одним из основных можно назвать Датчик Температуры. Датчик температуры ( THW ) представляет собой обыкновенный терморезистор, меняющий свое сопротивление в зависимости от температуры. Например, при температуре охлаждающей жидкости минус 10 градусов у него сопротивление около 5-6 Ком, а при температуре плюс 80 градусов – уже в пределах 300 Ом.Блок управления очень внимательно «следит» за изменениями этого сопротивления. Алгоритм работы у него довольно простой: чем ниже температура двигателя, тем больше надо подать топлива в цилиндры. Это самое «больше» достигается увеличением времен открывания форсунок. При минус 10 градусах, например, ECU открывает форсунки на 2,5 мс, а при плюс 80 градусах – на 1,2 мс.
Машины выпуска 1990 года и последующие стали намного «умнее» своих предшественников. На более «продвинутых» моделях мы не увидим на дроссельной заслонке винта байпасного канала. Он уже не нужен, потому что все делает электроника. В том числе – прогрев машины и установка холостого хода. Включив зажигание мы «оживляем» блок управления, который за доли секунды успевает выполнить массу операций.
Произвести проверку цепей и при неисправности какой-либо «записать» себе в память эту неисправность в виде цифрового кода.
«Опросить» все основные датчики, сенсоры и сравнить полученные значения с теми, что имеются у него в памяти и одновременно подготовиться к запуску двигателя.
Итак, мы запустили двигатель. Он еще холодный и блок управления «понимает» это, потому что датчик температуры показывает большое сопротивление. Форсунки открываются на более большое время, в цилиндры поступает больше топлива. Одновременно с этим блок управления. опираясь на те же показания датчика температуры управляет и количеством воздуха через шестиконтактный серводвигатель, установленный на корпусе воздушной заслонки. И топлива, и воздуха в цилиндры «подается» ровно столько, сколько требуется при данной температуре.
Все эти параметры «записаны» в памяти блока управления и отправной точной для них являются показания датчика температуры.Мы стоим, курим, двигатель прогревается и температура датчика повышается –его сопротивление снижается и одновременно с этим уменьшается количество подаваемого топлива и воздуха. Обороты двигателя снижаются. И так продолжается до тех пор, пока показания датчика температуры не станут минимальными, то есть такими, при которых блок управления «поймет», что двигатель уже прогрелся и «выставит» обороты холостого хода.
Однако это в «идеале». Так должно быть. В нашем же случае такого не получилось, на машине клиента двигатель «устойчиво» держал 1.100 оборотов.Проверяем температурные режимы – двигателя и датчика температуры. В «простых» условиях температуру двигателя можно приблизительно определить по стрелке температурного прибора на панели. Вне зависимости от того, какого типа у вас прибор (бывают вертикального и горизонтального расположения) – стрелка должна находиться или ровно посередине шкалы или чуть-чуть ниже.Это значит, что двигатель уже прогрет. А теперь переходим к датчику температуры и измеряем его сопротивление. Весьма желательно при этом пользоваться мультиметром. Смотрим на шкалу – 420 Ом.
Естественно, что при таком сопротивлении обороты двигателя будут повышенными, потому что блок управления «думает», что двигатель еще не прогрет. Почему такое случилось, в чем причина?
Т е р м о с т а т
Да-да, причина именно в нем, а не в «глубокой электронике». В 80-ти случаях из ста после его снятия и внимательного осмотра выясняется, что термостат просто-напросто «подклинивает» — на поверхности его термоэлемента видна блестящая потертость. Все правильно: термостат «перепускал», датчик температуры не успевал нагреваться и блок управления «думал», что двигатель еще холодный. После замены термостата обороты холостого хода пришли в норму.Хочется добавить еще одно замечание по «правильной» замене охлаждающей жидкости. Многие автовладельцы совершенно не обращают внимание на расширительный бачок ( к нему еще идет трубочка от радиатора ). И зря.
При замене жидкости заливают «Тосол» только в радиатор, не удосуживаясь заглянуть в расширительный бачок. А если там пусто. В этом случае происходит вот что. при нагреве двигателя жидкость расширяется и ее избыток «выдавливается» из системы охлаждения в расширительный бачок.
После остановки двигателя и его охлаждении жидкость начинает «втягиваться» обратно в систему охлаждения. И если в бачке нет жидкости или ее мало, то система охлаждения начнет «завоздушиваться», что чревато или недопрогревом печки или перегревом двигателя. Особенно это актуально для дизельных двигателей 2 L — T и всех Mitsubishi – при неправильном температурном режиме у них «лопаются перегородки» между клапанами.
При выборе и покупке термостата многие автовладельцы «утыкаются» в такой вопрос: «по каталогу положен такой-то, а его-то в этот самый момент в продаже и нет. И не предвидится. Что делать?». В этой ситуации можно посоветовать вот что – основной параметр термостата — его температура открывания, номиналы которой выдавлены на кольце или «донышке».
Далее — диаметр и высота. Впрочем на последнее — высоту термостата можно не сильно обращать внимание, потому что в «теле» двигателя всегда есть запас. Выбирайте по температуре. диаметру и смело устанавливайте – работать будет, проверено. Одно время мы даже устанавливали на Toyota термостаты от Nissan со смещенным центром. И все работало нормально, претензий от клиентов не было.
Владимир КУЧЕР, город Южно-Сахалинск
- Перепечатка разрешается только с разрешения автора и при условии размещения ссылки на источник
Высокие обороты холостого хода
Адрес: Удмуртия, Сарапул Сообщений 2,409
Высокие обороты холостого хода
Вот такая проблема.
Началось, когда ниже 0 стало. Обороты утром при заводке 1400, потом через 1 мин. падают до 1200. И так держатся весь день 1100-1200. НО почему-то вчера опять была норма 800-900 (-20 град. на улице).
Когда чистил клапан холостого хода, то порвал немного прокладку бумажную между дроссельной заслонкой и впускн. коллектором. Замазал герметиком. Может герметик отошел и через щель в прокладке воздух «лишний» идет.
Или датчмк температуры накрылся. С ними вообще неразбериха какая-то. В одной из тем это уже обсуждалось. По экзисту у меня их 3. Но я нашел всего 2. Причем один не там где нарисован на картинке в existe.
Еще вопрос на 4E-FE датчик детонации есть? Если нет, то наверное за датчик детонации я принял датчик температуры.
Датчик температуры охлаждающей жидкости двигателя (ECT)
ДАТЧИК ТЕМПЕРАТУРЫ ОХЛАЖДАЮЩЕЙ ЖИДКОСТИ (ECT)
Общее описание
Датчик температуры охлаждающей жидкости двигателя представляет собой терморезистор, который обычно имеет отрицательный температурный коэффициент. Это двухпроводной термистор, погруженный в охлаждающую жидкость и измеряющий ее температуру. Бортовой компьютер использует сигнал ECT в качестве основного поправочного коэффициента при расчете опережения зажигания и продолжительности впрыска.
Внешний вид
Датчик ECT показан на рис. 1.
Фиг.1
Принцип работы датчика ECT
Чтобы преобразовать изменение сопротивления ECT в изменение напряжения, которое затем обрабатывается ЭБУ, датчик ECT подключается в цепь, обычно снабжаемую опорным напряжением + 5В. При холодном двигателе и температуре окружающей среды 20 ºC сопротивление датчика составляет от 2000 Ом до 3000 Ом. После запуска двигателя температура охлаждающей жидкости начинает повышаться.ЭСТ постепенно нагревается, и его сопротивление пропорционально снижается. При 90 ºC его сопротивление находится в диапазоне от 200 Ом до 300 Ом.
Таким образом, на бортовой компьютер отправляется сигнал переменного напряжения, зависящего от температуры охлаждающей жидкости.
Типы датчиков ECT
- С отрицательным температурным коэффициентом. Это самые популярные датчики, используемые в автомобилях. Их сопротивление уменьшается с повышением температуры.
- С положительным температурным коэффициентом.Используется в некоторых старых системах, таких как Renix. Здесь напряжение и сопротивление увеличиваются с повышением температуры.
Процедура проверки работоспособности датчика ECT
— Датчик с отрицательным температурным коэффициентом —
Тест с вольтметром
- Откройте защитный резиновый колпачок на разъеме датчика температуры системы охлаждения.
- Подключите отрицательный провод вольтметра к массе шасси.
- Определите, какие клеммы являются сигнальными и заземляющими.
- Подключите положительный провод вольтметра к клемме сигнала ECT.
- Запустить двигатель из холодного состояния.
- В зависимости от температуры показания напряжения должны находиться в диапазоне от 2 до 3 В. Соотношение между напряжением и температурой показано в Таблице-1.
- Проверить, соответствует ли сигнал напряжения ЕСТ температуре.Для этого вам понадобится термометр.
- Запустите двигатель и прогрейте его до рабочей температуры. Во время прогрева двигателя напряжение должно уменьшаться в соответствии со значениями, приведенными в Таблице-1.
- Распространенная проблема заключается в том, что выходное сопротивление (и напряжение) неправильно изменяется за пределы своего нормального диапазона. Нормальное значение напряжения датчика ECT составляет 2 В при холодном двигателе и 0,5 В при прогретом двигателе. Датчик неисправности может показывать напряжение 1,5 В при холодном двигателе и 1.25 В при прогретом двигателе, что вызывает затруднения при запуске холодного двигателя и наличие богатой топливной смеси при прогретом двигателе. При этом не будут генерироваться коды неисправности (если встроенный контроллер не запрограммирован на обнаружение изменений напряжения), поскольку датчик продолжает работать в пределах своих проектных параметров. При обнаружении такого дефекта необходимо заменить датчик температуры охлаждающей жидкости.
- Если сигнал напряжения ЕСТ равен 0 В (отсутствие питания или короткое замыкание на массу) или если он равен 5.0В — у нас обрыв цепи.
Температура, ºС | Сопротивление, Ом | Напряжение, В |
0 | 4800–6600 | 4,00 — 4,50 |
10 | 4000 | 3.75 — 4,00 |
20 | 2200–2800 | 3,00 — 3,50 |
30 | 1300 | 3,25 |
40 | 1000–1200 | 2.50–3,00 |
50 | 1000 | 2,50 |
60 | 800 | 2,00 — 2,50 |
80 | 270–380 | 1.00–1,30 |
110 | 0,50 | |
Обрыв цепи | 5,0 ± 0,1 | |
короткое замыкание на массу | 0 | |
ПРИМЕЧАНИЕ. Это типичный пример, но это не означает, что приведенные выше значения являются действительными и должны быть получены в процессе проверки конкретной системы .
Возможные неисправности датчика:
— Напряжение на клемме сигнала ECT равно 0В.
- Проверить клеммы датчика на отсутствие замыкания на массу.
- Проверить целостность сигнальных проводов между датчиком и бортовым контроллером.
- Если все провода в порядке, но на бортовом контроллере нет выходного напряжения, необходимо проверить все соединения питания и заземления бортового контроллера. Если напряжения питания и заземления в порядке, под подозрение попадает сам бортовой контроллер.
— Напряжение на клемме сигнала ECT равно 5,0 В
Напряжение имеет такое значение при наличии разрыва цепи и может быть получено в одном из следующих условий:
- сигнальная клемма датчика ECT не обеспечивает подключение к датчику; Цепь датчика
- разомкнута; Цепь массы датчика
- разомкнута.
— Сигнал напряжения или опорное напряжение равно напряжению автомобильного аккумулятора.
Проверить короткое замыкание в проводе, подключенном к плюсовой клемме автомобильного аккумулятора или проводу питания.
— Датчик с отрицательным температурным коэффициентом —
Проверка с помощью омметра с датчиком ECT, отсоединенным от автомобиля
- Поместите датчик в подходящую емкость для воды и измерьте температуру воды.
- Измерьте сопротивление датчика и сравните его со значениями, приведенными в Таблице-1, показывающей взаимосвязь между сопротивлением и температурой.
- Нагрейте воду и периодически измеряйте сопротивление датчика. Сравните результаты с данными в таблице 1.
— Датчик с отрицательным температурным коэффициентом —
Измерение напряжения с помощью осциллографа
- Подключите активный конец щупа осциллографа к сигнальной клемме сенсора, а пробник заземления — к заземлению шасси.
- Установите синхронизацию развертки осциллографа в непрерывный режим измерения (регистрация медленно меняющихся сигналов).
- Поместите датчик в подходящую емкость с подогретой водой.
Через несколько минут измерения во время нагрева воды на экране осциллографа появится кривая изменения напряжения датчика (рис. 2). Обратите внимание на время измерения — около 10 минут. - Желательно непрерывно измерять температуру нагретой воды термометром и сравнивать ее со значениями, указанными в таблице 1.
Фиг.2
— Датчик с положительным температурным коэффициентом —
Датчик ECT с положительным температурным коэффициентом сопротивления представляет собой термистор, сопротивление которого увеличивается с повышением температуры.Используется в небольшом количестве систем (в основном в автомобилях Renault).
Общий метод проверки аналогичен методу проверки датчика с отрицательным температурным коэффициентом, описанному выше. Полученные данные измерений можно сравнить с данными, приведенными в таблице 2, показывающей зависимость между сопротивлением и температурой датчика.
Температура, ºС | Сопротивление, Ом | Напряжение, В |
0 | 254–266 | |
20 | 283–297 | 0.6 — 0,8 |
80 | 383–397 | 1,0 — 1,2 |
обрыв | 5,0 ± 0,1 | |
короткое замыкание на массу | 0 | |
(PDF) ШИМ-управление скоростью двигателя постоянного тока с помощью датчика температуры
конфигурации показаны для иллюстрации приложений сервопривода скорости и положения
с использованием ИС драйвера с переключением режимов.Philips Semiconductors производит широкий ассортимент
ИС управления для приложений SMPS, которые также могут использоваться в качестве контроллеров для двигателей постоянного тока с ШИМ
[6].
4. ШИМ-УПРАВЛЕНИЕ ДВИГАТЕЛЕМ
ШИМ-метод управления током будет рассмотрен путем изучения условий
при запуске двигателя для простой схемы, показанной на рисунке 3, где рабочий цикл
регулируется с помощью постоянного тока. управляющее напряжение, VREF. Начальный ток двигателя
определяется по уравнению
La.+ RaIa = Vdc (4)
Если коэффициент заполнения, управляемый с помощью VREF, задан, то длительность
импульса «ВКЛ» просто задается буквой «T». В течение этого интервала нарастание тока двигателя
перед вращением якоря показано уравнением (4). Если ширина импульса
близка к постоянной времени двигателя, то ток в конце первого импульса
достигнет почти 60% от своего максимального значения, Imax = Vdc / Ra.Это показано как I1 на
Рис.4. Постоянные и внутренние токи утечки двигателя согласно уравнению:
ia = I1. e- (t — δT) / τn
(5)
Как только начинается вращение, генерируется обратная ЭДС, которая вычитается из напряжения питания
[7]. Уравнение двигателя тогда принимает следующий вид:
La. + RaIa = Vdc — Ea
(6)
Следовательно, ток, потребляемый от источника питания, будет меньше, чем ток, потребляемый
при запуске из-за эффекта обратной ЭДС двигателя. , Шт.
Рис.4 Форма кривой тока двигателя при запуске Рис.5 Форма кривой тока двигателя, τa << T
Для двигателя с низкой индуктивностью, где электрическая постоянная времени очень велика меньше
, чем рабочий цикл, тогда форма волны тока двигателя будет точно соответствовать форме волны приложенного напряжения
, как показано на рисунке 5. Приблизительное выражение
для среднего тока двигателя дается уравнением (7).
Iavg = δ. (7)
5.ЭЛЕМЕНТЫ ЦЕПИ
Микроконтроллер ATmega16, датчик температуры LM35, двигатель L293E
Контроллер, ЖК-дисплей 16 x 2, двигатель 12 В постоянного тока, зуммер, светодиод, конденсатор,
резистор, POT, трансформатор, выпрямители, диоды.
Что такое датчики двигателя и как они работают?
Что такое датчики двигателя?
Система управления двигателем современного автомобиля состоит из широкого спектра электронных и электрических компонентов, включая датчики двигателя, реле и исполнительные механизмы, которые работают вместе.Они предоставляют блоку управления двигателем автомобиля важные параметры данных, необходимые для эффективного управления различными функциями двигателя. Вообще говоря, датчики двигателя — это электромеханические устройства, которые контролируют различные параметры двигателя. В двигателе используются различные типы датчиков, в том числе термопары, резистивные датчики температуры (RTD) и датчики на эффекте Холла.
Различные датчики двигателяТипы датчиков:
Кроме того, датчик термопары — это прибор для измерения температуры.Он преобразует температуру в электрический заряд. Термопары используют два разных проводника, которые контактируют друг с другом в одном или нескольких местах. Таким образом, он производит напряжение. Он, в свою очередь, отправляет сигнал в виде электрического тока в ЭБУ. Термопары обычно используются в качестве датчиков температуры. Он измеряет и контролирует температуру, например, в случае температуры охлаждающей жидкости двигателя.
Кроме того, термометры сопротивления или резистивные датчики температуры также измеряют температуру. Однако они делают это, соотнося сопротивление элемента RTD с температурой.Элемент RTD изготовлен из чистых металлов, таких как платина, никель или медь. В блоке испарителя кондиционера используется датчик зонда этого типа.
Датчик температуры переменного токаКроме того, датчик на эффекте Холла содержит преобразователь, который изменяет свое выходное напряжение в соответствии с магнитным полем. Обычно датчики на эффекте Холла определяют скорость или скорость. Этот тип датчика используется в приложениях для определения местоположения в автомобилях. Таким образом, они используются для определения скорости вращения коленчатого вала или его положения.
Кроме того, датчики двигателя предоставляют системе управления двигателем важные параметры данных в режиме реального времени.Эти датчики двигателя непрерывно контролируют параметры двигателя. Они также сообщают ЭБУ изменения, которые время от времени происходят в данных. На основе этих входных данных ЭБУ повторно рассчитывает правильное соотношение воздух-топливо и угол опережения зажигания. Он также рассчитывает и подает правильное количество топлива в двигатель при различных условиях нагрузки.
В современном автомобиле есть следующие датчики:
| SL. | Название датчика | Назначение |
| 01 | Измеритель соотношения воздух-топливо | Контролирует правильное соотношение воздух-топливо для двигателя |
| 02 | Датчик частоты вращения двигателя | Контролирует частоту вращения двигателя |
| 03 | Датчик положения дроссельной заслонки | Контролирует положение дроссельной заслонки в двигателе |
| 04 | Датчик положения коленчатого вала | Контролирует положение поршня в ВМТ двигателя |
| 05 | Датчик положения кулачка | Контролирует положение клапанов в двигателе |
| 06 | Датчик детонации | Обнаруживает детонацию в двигателе из-за опережения времени |
| 07 | Датчик температуры охлаждающей жидкости двигателя | Измеряет температуру двигателя |
| 08 | Датчик абсолютного давления в коллекторе или MAP | Используется для регулирования расхода топлива |
| 09 | Датчик массового расхода воздуха или массового расхода воздуха | Сообщает о массе воздуха, поступающего в двигатель, в ЭБУ |
| 10 | Кислород / O2 / Лямбда-зонд | Контролирует количество кислорода в выхлопе |
| 11 | Датчик давления топлива | Измеряет давление в топливной системе |
| 12 | Датчик скорости автомобиля (VSS) | Измеряет скорость автомобиля |
Кроме того, после расчета количества топлива ЭБУ отправляет сигналы различным реле и исполнительным механизмам.К ним относятся цепь зажигания, свечи зажигания, топливные форсунки, клапан управления воздухом холостого хода и клапан рециркуляции выхлопных газов (EGR). Таким образом, достигается наилучшая производительность двигателя при минимальном уровне выбросов.
Поскольку все датчики двигателя подключаются к ЭБУ, он, в свою очередь, также может отслеживать их неисправность. ЭБУ собирает сигналы с неисправных датчиков двигателя и сохраняет их в своей памяти. Вы можете диагностировать эти неисправности двумя способами. Во-первых, считывая память ЭБУ с помощью «кодов неисправностей».Или с помощью сложного диагностического оборудования двигателя, поставляемого производителями автомобилей.
Для получения дополнительной информации нажмите здесь.
Продолжайте читать: Как работает иммобилайзер двигателя? >>
О компании CarBikeTech
CarBikeTech — это технический блог. Его члены имеют опыт работы в автомобильной сфере более 20 лет. CarBikeTech регулярно публикует специальные технические статьи по автомобильным технологиям.
Посмотреть все сообщения CarBikeTech
Методы автоматического управления вентиляторами: тенденции
Аннотация: Вентиляторы охлаждения являются важной частью управления температурным режимом для мощных микросхем (таких как процессоры, FPGA и графические процессоры) и систем.К сожалению, их использование может иногда поднять уровень акустического шума системы до такой степени, что пользователь не сможет это сделать. Путем измерения температуры и соответствующей регулировки скорости вращения вентилятора скорость вентилятора (и уровень шума) можно минимизировать при низкой температуре, но увеличить в худших условиях, чтобы предотвратить повреждение. В этой статье описываются два метода автоматического управления скоростью охлаждающего вентилятора.
Высокоскоростные чипы имеют тенденцию к перегреву. Чем быстрее они становятся, тем горячее. В высокоскоростных цифровых микросхемах нового поколения используются более мелкие процессы, позволяющие снизить напряжение питания, что отчасти помогает, но количество транзисторов увеличивается быстрее, чем уменьшается напряжение питания.Таким образом, уровни мощности продолжают расти.При повышении температуры микросхемы может снизиться производительность. Параметры смещаются, максимальные рабочие частоты снижаются, а время может выйти за рамки спецификации. С точки зрения пользователя, когда это происходит, продукт больше не работает должным образом. Следовательно, первая причина охлаждения высокоскоростных микросхем заключается в том, чтобы поддерживать хорошую производительность в течение максимально длительного времени работы и в самом широком диапазоне условий окружающей среды. Максимально допустимая температура, при которой высокоскоростной чип отвечает его параметрическим характеристикам, зависит, среди прочего, от процесса и конструкции чипа (насколько «близко к краю» он работает).Типичные максимальные значения температуры матрицы находятся в диапазоне от + 90 ° C до + 130 ° C.
За пределами точки, где начинается снижение производительности, чрезмерная температура кристалла вызывает катастрофическое повреждение микросхем. Максимальный предел температуры матрицы обычно значительно превышает + 120 ° C и зависит от таких факторов, как процесс, упаковка и продолжительность высокотемпературных условий. Поэтому высокоскоростные микросхемы охлаждаются, чтобы избежать достижения температуры, которая может снизить производительность и вызвать непоправимый ущерб.
Единый метод охлаждения редко используется с высокоскоростными чипами.Вместо этого обычно необходимы комбинации методов для обеспечения высокой производительности и постоянной надежности. Радиаторы, тепловые трубки, вентиляторы и дросселирование тактовой частоты обычно используются для охлаждения высокоскоростных микросхем. Последние два, вентиляторы и регулировка частоты, могут помочь решить проблему с нагревом, но создают свои собственные проблемы.
Вентиляторы могут значительно снизить температуру высокоскоростного чипа, но они также создают сильный акустический шум. Шум от вентилятора, работающего на полной скорости, раздражает некоторых потребителей, а также становится мишенью государственных органов, обеспокоенных долгосрочными последствиями шума на рабочем месте.Шум вентилятора можно значительно снизить, изменяя скорость вращения вентилятора в зависимости от температуры; вентилятор может вращаться медленно (и очень тихо) при низкой температуре и может увеличиваться при повышении температуры.
Регулирование тактовой частоты — уменьшение тактовой частоты для уменьшения рассеиваемой мощности — работает за счет снижения производительности системы. При регулировании частоты система продолжает работать, но с пониженной скоростью. Очевидно, что в высокопроизводительных системах регулирование должно выполняться только тогда, когда это абсолютно необходимо, то есть когда температура достигает точки, при которой функциональность может быть потеряна.
Для управления скоростью вращения вентилятора или дросселированием тактовой частоты в зависимости от температуры необходимо сначала измерить температуру высокоскоростного чипа. Это можно сделать, разместив датчик температуры рядом с целевой микросхемой — либо непосредственно рядом с ней, либо, в некоторых случаях, под ней или на радиаторе. Измеренная таким образом температура соответствует температуре высокоскоростного чипа, но может быть значительно ниже (примерно до 30 ° C), а разница между измеренной температурой и температурой кристалла увеличивается по мере увеличения рассеиваемой мощности.Следовательно, температура печатной платы или радиатора должна коррелировать с температурой кристалла высокоскоростного чипа.
Лучшая альтернатива возможна с рядом высокоскоростных микросхем. Многие процессоры, графические чипы, ПЛИС и другие высокоскоростные ИС содержат на кристалле «тепловой диод», который на самом деле представляет собой биполярный транзистор с диодным соединением. Используя датчик температуры с удаленным диодом, подключенный к этому термодиоду, можно напрямую измерить температуру кристалла быстродействующей ИС с превосходной точностью.Это не только устраняет большие температурные градиенты, связанные с измерением температуры вне корпуса целевой ИС, но также устраняет длительные тепловые постоянные времени, от нескольких секунд до минут, которые вызывают задержки в реакции на изменения температуры кристалла.
Необходимость в управлении вентиляторами вынуждает проектировщика сделать несколько ключевых решений. Первый выбор — это метод регулировки скорости вентилятора. Распространенным методом регулировки скорости бесщеточного вентилятора постоянного тока является регулировка напряжения питания вентилятора.Этот подход хорошо работает для напряжений источника питания примерно 40% от номинального значения. Однако есть недостаток. Если напряжение источника питания изменяется с использованием линейного проходного устройства, проходное устройство будет рассеивать мощность, тем самым снижая эффективность. В худшем случае рассеяние мощности проходного устройства будет происходить примерно на 50% от полной скорости и будет составлять примерно 25% от рассеиваемой мощности вентилятора на полной скорости. Более высокая эффективность может быть достигнута при использовании импульсного источника питания для вентилятора, но это увеличивает стоимость и увеличивает количество компонентов.
Другой популярный метод управления скоростью вращения вентилятора — это питание вентилятора низкочастотным ШИМ-сигналом, обычно в диапазоне около 30 Гц, рабочий цикл которого изменяется для регулировки скорости вентилятора. Это недорого, потому что можно использовать однопроходный транзистор с малым проходом. Это эффективно, потому что проходной транзистор используется в качестве переключателя. Однако недостатком этого подхода является то, что он может сделать вентилятор несколько более шумным из-за импульсного характера источника питания. Быстрые фронты сигнала ШИМ заставляют механическую структуру вентилятора двигаться (что-то вроде плохо спроектированного громкоговорителя), что может быть легко слышно.
Третий подход можно использовать с вентиляторами, имеющими входы для регулирования скорости. Такие вентиляторы, обычно называемые «четырехпроводными» вентиляторами (заземление, питание, выход тахометра, вход управления скоростью ШИМ), позволяют управлять их скоростью с помощью ШИМ-сигнала на логическом уровне. Этот сигнал ШИМ обычно находится в диапазоне от 20 кГц до 50 кГц, и результирующая скорость вентилятора примерно пропорциональна рабочему циклу.
Другой вариант управления вентилятором заключается в том, измеряется ли скорость вентилятора как часть схемы управления. Помимо питания и заземления, многие вентиляторы доступны с третьим проводом, который передает сигнал «тахометра» на схему управления вентилятором.Выход тахометра выдает заданное количество импульсов (например, два импульса) на каждый оборот вентилятора. Некоторые схемы управления вентиляторами используют эту форму волны тахометра в качестве сигнала обратной связи, который позволяет регулировать напряжение вентилятора или рабочий цикл ШИМ для получения желаемых оборотов. Более простой подход игнорирует любой сигнал тахометра и просто настраивает привод вентилятора на ускорение или замедление без обратной связи по скорости. Управление скоростью с помощью этого метода менее точное, но и стоимость ниже, и, по крайней мере, один контур обратной связи удален, что упрощает систему управления.
В некоторых системах важно ограничить скорость изменения скорости вентилятора. Это особенно важно, когда система находится в непосредственной близости от пользователей. Простое включение и выключение вентилятора или немедленное изменение скорости при изменении температуры допустимо в некоторых средах. Однако, когда пользователи находятся поблизости, внезапные изменения шума вентилятора очевидны и раздражают. Ограничение скорости изменения сигнала привода вентилятора до приемлемого значения (например, 1% в секунду) гарантирует, что акустические эффекты управления вентилятором сведены к минимуму.Скорость вентилятора все равно меняется, но это не привлекает внимания.
Профиль управления вентилятором — еще одна важная конструктивная переменная. Обычно вентилятор выключается при температуре ниже определенного порога, а затем начинает вращаться с низкой скоростью (например, 40% от полной скорости) после превышения порогового значения. При повышении температуры привод вентилятора линейно увеличивается с температурой, пока не достигнет 100% мощности. Наилучший наклон зависит от системных требований. Более быстрый наклон приводит к несколько более стабильной температуре чипа, но скорость вращения вентилятора меняется в большей степени, поскольку рассеиваемая мощность меняется от одного момента к другому.Если целью является наивысшая производительность, начальная температура и крутизна должны быть выбраны таким образом, чтобы вентилятор достиг полной скорости до того, как температура кристалла станет достаточно высокой, чтобы инициировать дросселирование тактовой частоты.
Реализовать схему управления вентилятором можно несколькими способами. Доступны различные удаленные датчики температуры с пятью каналами измерения, которые могут определять температуру кристалла высокоскоростного чипа и передавать данные о температуре на микроконтроллер. Регуляторы скорости вращения вентилятора с несколькими каналами мониторинга фантахометра могут обеспечить надежное управление скоростью вращения вентилятора или напряжением питания на основе команд от внешнего микроконтроллера.Для невысокой стоимости и простоты реализации доступны интегральные схемы с датчиком температуры и автоматическим управлением вентилятором, включенные в единый пакет. Сенсоры / контроллеры также обычно включают в себя обнаружение перегрева для регулирования тактовой частоты и отключения системы, тем самым защищая высокоскоростные микросхемы от катастрофического отказа из-за перегрева.
Примеры некоторых типичных ИС управления скоростью вращения вентилятора показаны на рисунках 1 , 2 и 3 . MAX6620 на Рисунке 1 управляет скоростью вращения вентилятора, генерируя напряжение постоянного тока для четырех вентиляторов с помощью внешних транзисторов.MAX6620 использует обратную связь тахометра, чтобы установить скорость вращения вентиляторов на выбранные значения. На рисунке 2 MAX6653 управляет одним вентилятором, модулируя питание вентилятора низкочастотным ШИМ-сигналом. MAX6653 также определяет температуру и регулирует рабочий цикл ШИМ на основе этой температуры. На рисунке 3 показан MAX6639, который измеряет температуру и контролирует до двух вентиляторов в зависимости от температуры. Выходная частота ШИМ MAX6639 может достигать 25 кГц, поэтому он может управлять 4-проводным вентилятором, как показано на рисунке.MAX6639 регулирует скорость вращения вентилятора в зависимости от измеренной температуры.
Рис. 1. Показанный здесь MAX6620 представляет собой четырехканальный линейный контроллер скорости вентилятора, использующий внешние транзисторы для подачи на вентилятор переменного тока. MAX6620 отслеживает сигналы тахометра от вентиляторов и регулирует напряжение источника питания таким образом, чтобы получить желаемую частоту тахометра.
Рисунок 2. Датчик температуры ШИМ-выхода и автоматический регулятор скорости вращения вентилятора.Скорость вентилятора регулируется автоматически в зависимости от температуры. Выходные сигналы дроссельной заслонки и системы не позволяют высокоскоростной микросхеме достигать разрушительных температур. Контакты CRIT0 и CRIT1 могут быть привязаны к источнику питания или заземлению для выбора пороговых значений температуры отключения по умолчанию, обеспечивая защиту даже при зависании системного программного обеспечения.
Рис. 3. MAX6639, управляющий двумя 4-проводными вентиляторами. При управлении 4-проводными вентиляторами выходная частота ШИМ составляет 25 кГц. MAX6639 измеряет две температуры и может управлять скоростью вращения вентилятора на основе этих измеренных температур.
Почему высокие обороты при холодном двигателе?
Когда вы заводите автомобиль, вы можете видеть, что частота вращения двигателя выше 1000 об / мин, близка к 1500 об / мин. Высокие обороты являются нормальным поведением автомобиля при холодном двигателе, поскольку они помогают постепенно повышать температуру моторного масла, уменьшая его вязкость и нагревая охлаждающую жидкость, чтобы помочь двигателю достичь рабочей температуры за счет сжигания большего количества топлива.
После нагрева охлаждающей жидкости до нормальной температуры частота вращения должна вернуться к значениям, указанным в руководстве по эксплуатации автомобиля (ниже 1000 об / мин).Более высокие обороты двигателя зимой прослужат дольше, чем летом, из-за очевидных причин низких температур зимой.
Однако, если частота вращения двигателя не возвращается к норме, это может означать возможную проблему и необходимость дополнительных проверок или возможного ремонта.
Значения оборотов и времени указаны в инструкции по эксплуатации автомобиля. Если скорость и / или время возврата увеличиваются, это означает, что вам следует выяснить причину.
Причин, по которым высокие обороты двигателя могут возникать помимо нормальных, довольно много.
- Воздуховод впускного коллектора. В некоторых двигателях впускной канал закрывается электромагнитным клапаном, импульсным двигателем или электромагнитным клапаном с импульсным управлением. При выходе из строя этих элементов воздушный канал не закроется должным образом, и, как следствие, большое количество воздуха пройдет через него во впускной коллектор.
- Трубки впускного коллектора. Избыточный воздух попадает в систему из-за трещин на впускных трубопроводах, их разгерметизации или плохих точек соединения. Обычно это можно определить по «свисту», который слышен оттуда, вызывая высокие обороты двигателя.
- Неисправность дроссельной заслонки . Загрязнение дроссельной заслонки с нагаром приводит к неполному закрытию ее и приводит к высоким оборотам двигателя. Другая причина — твердый коврик, который давит на педаль газа, а водитель этого не осознает.
- Неисправный датчик положения дроссельной заслонки . Основная функция датчиков положения дроссельной заслонки — передавать электронному блоку управления (ЭБУ) информацию о положении педали газа в определенное время. Если датчик положения дроссельной заслонки выходит из строя, ЭБУ заметит это и, в качестве решения, подаст максимальное количество воздуха, которое приведет к увеличению оборотов двигателя на холостом ходу.Скорость также может увеличиваться при сбросе настроек дроссельной заслонки.
- В некоторых автомобилях, например Toyota, конструкция двигателя предусматривает использование электродвигателей для принудительного холостого хода , хотя их модели и методы управления не совпадают, и все они имеют раздельное управление. Таким образом, проблема высоких оборотов двигателя на холостом ходу может быть связана либо с его системой управления, либо с их конкретным электродвигателем.
- Неисправный регулятор холостого хода. Еще одна причина, по которой двигатель имеет высокие обороты на холоде.Часто выход из строя регулятора холостого хода вызван повреждением его электрических контактов.
- Неисправный датчик массового расхода воздуха (MAF) . Если этот датчик выходит из строя, то на электронный блок управления (ЭБУ) также будет поступать неверная информация о количестве воздуха, подаваемого в двигатель. Таким образом, может возникнуть ситуация, когда ЭБУ захочет больше открыть дроссельную заслонку, чтобы увеличить поток воздуха. Это приведет к увеличению оборотов двигателя не только в холодную, но и в теплую погоду.
- Неисправность датчика температуры всасываемого воздуха . Если этот датчик выходит из строя, информация, полученная от него ЭБУ, будет неверной, и оптимальные обороты и оптимальная воздушно-топливная смесь не могут быть сформированы. Следовательно, может произойти повышенная частота вращения двигателя на холостом ходу.
- Неэффективный или неисправный водяной насос . Вы можете столкнуться с высокими оборотами двигателя на холоде, если водяной насос вашего автомобиля потеряет свою производительность. Поскольку он перекачивает недостаточное количество охлаждающей жидкости, нагрев холодного двигателя будет работать неэффективно, и, следовательно, двигатель будет работать на высоких оборотах в течение изрядного количества времени.Вы должны знать, что насос имеет эту проблему, если после нажатия на педаль газа обогреватель выдувает горячий воздух, а после того, как вы убрали ногу с педали, выдуваемый воздух холодный.
- Неисправный или неисправный электронный блок управления (ЭБУ) . Не часто причина: ЭБУ, который не работает должным образом из-за проблем с программным обеспечением, может привести к тому, что двигатель будет иметь и поддерживать высокую скорость в холодном состоянии. Проверить проблему может быть очень просто, если ошибка хранится в его памяти, и вы можете проверить ее с помощью сканера OBD, но в редких случаях ошибка не сохраняется, что очень затрудняет диагностику.
- Отказ термостата . Неисправности термостата являются причиной многих неисправностей автомобиля, включая высокие обороты. Когда двигатель холодный, термостат закрыт, позволяя охлаждающей жидкости циркулировать только через двигатель. Когда охлаждающая жидкость достигает рабочей температуры, она открывается, и антифриз дополнительно охлаждается, проходя полный круг системы охлаждения (также известный как «большой круг»). Но если термостат с самого начала не близок, а охлаждающая жидкость изначально движется в этом режиме, двигатель будет дольше работать на более высоких оборотах, пока не прогреется полностью.
- Неисправность датчика температуры охлаждающей жидкости . Если этот датчик выходит из строя, он отправляет в ЭБУ «ложную» информацию, например, что рабочая температура охлаждающей жидкости еще не достигнута. Так что двигатель будет работать на повышенных оборотах, чтобы якобы прогреть охлаждающую жидкость.
Что проверить в первую очередь, если у вас высокие обороты двигателя?
Если вы столкнулись с этой проблемой и понимаете, что повышенные обороты не являются нормальным явлением, вам следует сначала проверить дроссельную заслонку и датчик частоты вращения холостого хода , поскольку на его поверхности могут накапливаться отложения.
Дроссельную заслонку можно почистить, и проблему можно решить. Вы можете добиться отличных результатов с помощью этого очистителя.
Затем проверьте герметичность воздухозаборников и воздуховодов.
Также обратите внимание на систему охлаждения, особенно на термостат и водяной насос и их симптомы, описанные выше.
Не паникуйте, если двигатель работает на высоких оборотах в холодный период, это нормально, если это произойдет на короткое время. Период высоких оборотов может длиться дольше, если температура окружающей среды низкая.Но если частота вращения двигателя сохраняется в течение более длительного периода времени или сохраняется, это хороший повод для проверки.
Управление скоростью холостого хода — обзор
Управление скоростью холостого хода
Работа автомобильного двигателя на холостом ходу требует особого внимания. В режиме холостого хода водитель не воздействует на дроссельную заслонку через педаль акселератора. Двигатель должен создавать точно такой крутящий момент, который необходим для уравновешивания всех приложенных моментов нагрузки от трансмиссии и любых дополнительных устройств, а также крутящих моментов внутреннего трения и накачки, чтобы работать с постоянной угловой скоростью (об / мин) холостого хода.Определенные моменты нагрузки возникают в результате действий водителя (например, переключение селектора коробки передач с парковки или нейтрали на движение или реверс и переключение электрических нагрузок). Однако некоторые другие моменты нагрузки возникают без прямой команды водителя (например, срабатывания муфты кондиционера).
Как и во всех режимах работы двигателя, крутящий момент, создаваемый двигателем на холостом ходу, определяется массовым расходом всасываемого воздуха. Электронный регулятор подачи топлива регулирует поток топлива для поддержания стехиометрии, пока двигатель полностью прогрет, и может на короткое время регулировать количество топлива, несколько превышающее стехиометрию, во время холодных запусков.Обычно при работе двигателя на холостом ходу электронное управление двигателем предназначено для работы двигателя с фиксированной частотой вращения независимо от нагрузки. Он делает это, регулируя массовый расход воздуха с помощью команды дроссельной заслонки от водителя на нуле. Воздушный поток, необходимый для поддержания желаемых оборотов холостого хода, должен поступать в двигатель через дроссельный узел, при этом дроссельная заслонка находится под небольшим, но ненулевым углом. В качестве альтернативы некоторые двигатели оснащены специальным воздушным каналом в обход дроссельной заслонки. Для любого метода требуется привод, позволяющий электронной системе управления двигателем регулировать MAF на холостом ходу.В главе 5 обсуждаются различные приводы, применяемые для управления потоком воздуха на холостом ходу. Для настоящего обсуждения мы предполагаем, что модель MAF на холостом ходу является представительной для практических конфигураций исполнительных механизмов, обсуждаемых в главе 5. (Обратите внимание, что в следующем анализе индекс I включен для всех переменных и параметров, чтобы подчеркнуть, что Настоящая система относится к управлению частотой вращения холостого хода.)
Независимо от конфигурации обхода воздуха на холостом ходу, массовый расход воздуха в состоянии холостого хода (который мы обозначаем M.aI) пропорционален смещению подвижного элемента, который регулирует размер отверстия, через которое проходит воздух холостого хода (например, угол дроссельной заслонки θ T или его эквивалент x T в конструкции с байпасом холостого хода ). Для целей настоящего обсуждения мы предполагаем, что указанный крутящий момент двигателя на холостом ходу T iI определяется как
(4.38) TiI = KIM.aI
, где K I — постоянная для холостая воздушная система; далее предполагаем, что М.aI изменяется линейно в зависимости от положения переменной байпаса холостого хода x I :
(4,39) M.aI = KmxI
, где x I — отверстие в канале байпаса холостого хода, а K м постоянная для данной конструкции.
Обычно подвижный элемент в конструкции перепускного канала холостого хода включает в себя пружину, которая удерживает x I = 0 в отсутствие какого-либо срабатывания. Сила срабатывания (или крутящий момент) действует на силу (крутящий момент) этой пружины и внутреннюю силу (крутящий момент) при ускорении массы м I (или момент инерции для вращающейся конфигурации перепускного воздушного клапана) подвижных элементов и сила трения (крутящий момент).В настоящее время мы предполагаем линейную модель движения исполнительного механизма:
(4,40) mIx¨I + dIx.I + kIxI = Kau
, где d I — постоянная вязкого трения, k I , — жесткость возвратной пружины, u — входной сигнал привода и K, a — постоянная привода.
Для этого обсуждения управления частотой вращения холостого хода также необходимо иметь модель взаимосвязи между указанным крутящим моментом и угловой скоростью двигателя на холостом ходу.Чтобы избежать путаницы с другими частотными переменными, мы адаптируем обозначение Ом I для угловой скорости коленчатого вала на холостом ходу (рад / с). Эта переменная дается формулой. (4.41)
(4.41) ΩI = πRPMI30
Где RPMI = RPMatidle
В целом для относительно небольших изменений в Ω I моменты нагрузки (включая моменты трения и откачки) могут быть представлены следующей линейной модель:
TLΩI = ReΩI
, где R e является практически постоянным для данной конфигурации двигатель / нагрузка при определенной рабочей температуре.Указанный крутящий момент на холостом ходу T iI имеет следующую приблизительную линейную модель:
(4,42) Ti≅JeΩ.I + TLΩ
, где J e — момент инерции двигателя и компонентов, вращающихся под нагрузкой. .
Используя методы преобразования Лапласа из Приложения A, можно получить передаточную функцию двигателя на холостом ходу H eI ( s ):
(4,43) HeIs = ΩIsTis
(4,44) = 1Jes + Re
Аналогичным образом передаточная функция для динамики привода холостого хода H aI ( s ) задается как
(4.45) HaIs = xIsus = KamIs2 + 2ζIωIs + ωI2
Где ωI = kI / mI
ζI = dI2mIωI
Эти передаточные функции могут быть объединены для получения передаточной функции (в стандартной форме) «установки» регулирования холостого хода. H pI ( s ):
(4,46) HpIs = ΩIsus
(4,47) = KaKmKIJemIs2 + 2ζωIs + ωI2s + ReJe
, где u — это управляющая переменная, передаваемая исполнительному механизму.
Управление холостым ходом с разомкнутым контуром нецелесообразно из-за больших колебаний нагрузки и изменений параметров из-за изменений условий эксплуатации.С другой стороны, регулятор CL хорошо подходит для регулирования холостого хода до желаемого значения. На рис. 4.26 представлена блок-схема такой системы регулирования холостого хода.
Рис. 4.26. Блок-схема системы регулирования холостого хода.
Используя процедуры анализа Приложения A и обозначив уставку холостого хода Ом с , можно показать, что передаточная функция CL управления холостым ходом H CLI задается
(4.48) HCLIs. = ΩIsΩSs = HCIsHpII + HssHCIsHpIs
, где H cI — передаточная функция для регулятора холостого хода, а H s ( s ) — передаточная функция для датчика частоты вращения коленчатого вала.
В Приложении A представлены три стратегии управления: P, PI и PID. Из них только пропорциональный ( P ) нежелателен, поскольку он имеет ненулевую стационарную ошибку между Ом I и его желаемым значением ( Ом s ). В Приложении A также показано, что пропорционально-интегральный ( PI ) контроль имеет нулевую ошибку установившегося состояния, но потенциально может привести к нестабильной системе CL. Однако, в зависимости от параметров системы, существуют диапазоны значений как для пропорционального усиления ( K p ), так и для интегрального усиления ( K I ), для которых возможна стабильная работа и для которых регулируется частота вращения холостого хода. система имеет приемлемую производительность.Передаточная функция контроллера для управления PI задается формулой
(4.49) HcIs = Kp + KIs = Kps + s0s
Для иллюстрации примерных характеристик управления холостым ходом мы предполагаем следующий набор параметров:
ζI = 0,5ωI = 25рад / с следующее выражение:
(4.50) HFs = HcIsHpIs = Knums + s0Kdens3 + 2ζωIs2 + ωI2ss + ωe
Настоящий анализ упрощается, если принять идеальный датчик угловой скорости, такой что H s ( s ) = 1.В этом случае передаточная функция управления холостым ходом CL ( H CLI ( s )) задается уравнением. (4.51)
(4.51) HCLIs = KpHFs1 + KpHFs
Влияние пропорционального усиления на стабильность этого регулятора холостого хода CL можно оценить с помощью методов корневого локуса, как объяснено в Приложении A. Рис. 4.27 представляет собой график корня место для этого регулирования холостого хода с предполагаемыми параметрами.
Рис. 4.27. Корневой локус для управления холостым ходом.
Из этого рисунка видно, что все полюса CL начинаются в левой полуплоскости комплексной плоскости и все стабильны.Однако, когда K p увеличивается, пара полюсов пересекает правую полукомплексную плоскость и становится нестабильной. Используя функцию MATLAB «курсор данных» под панелью инструментов на графике корневого годографа, можно увидеть, что для K p = 1,2 полюса, которые мигрируют в правую часть комплексной плоскости, являются стабильными и имеют коэффициент демпфирования около 25%.
Использование этого значения для K p (т.е. K p = 1.2), динамический отклик системы CL был исследован путем подачи команды на ступенчатое изменение числа оборотов с начальных 550–600 об / мин при t = 0,5 с. Рис. 4.28 представляет собой график динамической реакции холостого хода двигателя (в об / мин) на этот ввод команды.
Рис. 4.28. Ступенчатая характеристика регулятора холостого хода.
Видно, что частота вращения на холостом ходу достигает командных оборотов в минуту после короткой переходной реакции с нулевой установившейся ошибкой.
Параметры, используемые в этом моделировании управления частотой вращения холостого хода, не обязательно являются репрезентативными для какого-либо конкретного двигателя.Скорее они были выбраны для иллюстрации характеристик этой важной функции управления двигателем. В главе 6, где обсуждается цифровое управление двигателем (силовой передачей), моделируется дискретное управление.
ПОНИМАНИЕ СЕГОДНЯШНИХ ЭЛЕКТРОННЫХ ДАТЧИКОВ
В современных автомобилях то, что вы чувствуете, когда ваш двигатель не работает должным образом, может быть не тем, что действительно беспокоит его. Позвольте мне уточнить. На старых предкомпьютерных автомобилях проблема с двигателем обычно может быть связана с системой зажигания, топливной системой, электрической системой, системой охлаждения или системой впускного коллектора.Проблема была изолирована в одной из этих систем и исправлена. Например, отказ двигателя может быть связан с неисправными свечами зажигания. Поменять свечи зажигания и — бинго! — машина едет как чемпион.
Любой, кто пытается диагностировать проблемы с двигателем на современных автомобилях, должен принимать во внимание целую другую систему, систему датчиков двигателя, набор электронных датчиков и часовых, которые контролируют и наблюдают за различными функциями двигателя. Например, отказ двигателя может быть вызван неисправным датчиком, а не свечами зажигания, карбюратором или моментом зажигания.
Allparts Inc. имеет удобную диаграмму, в которой изолируются некоторые общие проблемы, связанные с компонентами управления двигателем, и я изменил эту диаграмму в виде столбцов. Хотя это не следует рассматривать как окончательный ответ на вашу проблему с двигателем с электронным управлением, следующие предложения могут быть полезны, когда вы пытаетесь выяснить, что вызывает эту проблему с управляемостью. Вот некоторые из наиболее распространенных проблем, с которыми сталкиваются многие новые автомобили, и список возможных неисправных датчиков, которые могут их вызывать: — Двигатель глохнет: датчик температуры охлаждающей жидкости; датчик / переключатель температуры; датчик положения дроссельной заслонки; Клапан IAC (регулировка холостого хода) и привод ISC (регулировка холостого хода); Клапан рециркуляции выхлопных газов.
— Двигатель колеблется или спотыкается: Датчик температуры охлаждающей жидкости; датчик / переключатель температуры; датчик положения дроссельной заслонки; Датчик положения системы рециркуляции ОГ; переносной вакуумный переключатель; Клапан рециркуляции ОГ.
— Жесткий запуск: Датчик температуры охлаждающей жидкости; Клапан рециркуляции ОГ.
— Неровный холостой ход или помпаж: датчик температуры охлаждающей жидкости; Клапан IAC и привод ISC; переносной вакуумный переключатель; Клапан рециркуляции ОГ.
— Нестабильная частота вращения холостого хода: Датчик положения дроссельной заслонки; Клапан IAC и привод ISC; портированный вакуумный переключатель.
— Звон или стук: Датчик положения дроссельной заслонки; Датчик положения системы рециркуляции ОГ; переносной вакуумный переключатель; Клапан рециркуляции ОГ.
— Низкая производительность и экономичность: Датчик температуры охлаждающей жидкости; датчик / переключатель температуры; датчик положения дроссельной заслонки; Датчик положения системы рециркуляции ОГ; датчик кислорода (O2); переносной вакуумный переключатель; Клапан рециркуляции ОГ.
— Неустойчивое или внезапное ускорение: датчик положения системы рециркуляции ОГ.
— Проблемы с прогревом холодного двигателя: Датчик температуры охлаждающей жидкости; датчик / переключатель температуры; Клапан IAC и привод ISC; переносной вакуумный переключатель; Клапан рециркуляции ОГ.
— Дизель (работающий): клапан IAC и привод ISC.
— Черный дым из выхлопа: Датчик температуры охлаждающей жидкости.
— Сильный запах выхлопных газов: Датчик / переключатель температуры.
— Нет блокировки гидротрансформатора: датчик положения системы рециркуляции ОГ.
— Высокий уровень выбросов углеводородов: датчик кислорода.
— Бросок на шоссе: датчик температуры охлаждающей жидкости; Клапан рециркуляции ОГ.
— Индикатор «Check Engine» на скоростях по шоссе: Датчик кислорода.
— Шум при утечке выхлопных газов: обратный клапан выхлопных газов.
— Неисправность воздушного насоса: выпускной обратный клапан.
— Неисправность переключающего клапана / клапана управления воздухом: выпускной обратный клапан.
Приведенный выше список не предназначен для того, чтобы сделать вас специалистом по мгновенной диагностике болезней современного двигателя с компьютерным управлением. Он предлагается как руководство, что-то, что может помочь вам определить причину проблемы или, по крайней мере, дать вам некоторое представление о том, где искать.
Этот список также не предназначен для того, чтобы вы могли перехитрить своего механика или техника.
