Что такое асинхронный преобразователь частоты. Как работает преобразователь частоты для асинхронного двигателя. Какие бывают виды преобразователей частоты. В чем преимущества и недостатки разных типов преобразователей частоты.
Что такое асинхронный преобразователь частоты
Асинхронный преобразователь частоты — это электронное устройство, предназначенное для регулирования скорости вращения асинхронного электродвигателя путем изменения частоты и напряжения питания. Основные функции преобразователя частоты:
- Преобразование переменного напряжения одной частоты в переменное напряжение другой частоты
- Плавное регулирование скорости вращения асинхронного двигателя
- Оптимизация энергопотребления двигателя
- Защита двигателя от перегрузок
- Обеспечение плавного пуска и торможения двигателя
Принцип работы преобразователя частоты для асинхронного двигателя
Принцип работы асинхронного преобразователя частоты основан на двух ключевых этапах:

- Выпрямление — преобразование переменного напряжения сети в постоянное напряжение
- Инвертирование — преобразование постоянного напряжения в переменное напряжение с регулируемой частотой
На первом этапе входное переменное напряжение выпрямляется с помощью диодного или тиристорного выпрямителя. Затем выпрямленное напряжение сглаживается в звене постоянного тока с помощью конденсаторов и дросселей. На втором этапе инвертор на IGBT-транзисторах формирует из постоянного напряжения переменное напряжение нужной частоты и амплитуды.
Виды преобразователей частоты
Существует два основных вида преобразователей частоты для асинхронных двигателей:
1. Двухзвенные преобразователи частоты
Двухзвенные преобразователи имеют в своем составе выпрямитель, звено постоянного тока и инвертор. Они подразделяются на:
- Преобразователи с автономным инвертором напряжения (АИН)
- Преобразователи с автономным инвертором тока (АИТ)
2. Непосредственные преобразователи частоты (НПЧ)
НПЧ осуществляют прямое преобразование частоты без промежуточного звена постоянного тока. Они делятся на:
- НПЧ с естественной коммутацией
- НПЧ с искусственной коммутацией
Преимущества и недостатки разных типов преобразователей частоты
Двухзвенные преобразователи с АИН
Преимущества:
- Широкий диапазон регулирования частоты (0-400 Гц)
- Высокое качество выходного напряжения
- Возможность рекуперации энергии в сеть
- Простота управления
Недостатки:
- Сложность схемы
- Высокая стоимость
Двухзвенные преобразователи с АИТ
Преимущества:
- Способность работать на низких частотах
- Хорошие динамические характеристики
- Возможность рекуперации энергии
Недостатки:
- Ограниченный диапазон регулирования частоты
- Сложность системы управления
Непосредственные преобразователи частоты
Преимущества:
- Высокий КПД
- Простота конструкции
- Естественная коммутация тиристоров
Недостатки:
- Узкий диапазон регулирования частоты
- Низкое качество выходного напряжения
- Сложность управления
Как выбрать преобразователь частоты для асинхронного двигателя
При выборе преобразователя частоты для асинхронного двигателя необходимо учитывать следующие факторы:

- Мощность и напряжение питания двигателя
- Требуемый диапазон регулирования скорости
- Характер нагрузки (постоянный или переменный момент)
- Необходимость рекуперации энергии
- Условия эксплуатации (температура, влажность, вибрации)
Правильный выбор преобразователя частоты позволит оптимизировать работу асинхронного двигателя и повысить энергоэффективность системы электропривода в целом.
Применение преобразователей частоты в промышленности
Преобразователи частоты для асинхронных двигателей широко применяются в различных отраслях промышленности:
- Насосные и вентиляторные установки
- Конвейерные системы
- Металлообрабатывающие станки
- Подъемно-транспортное оборудование
- Компрессорные установки
- Экструдеры и смесители
Использование преобразователей частоты позволяет значительно снизить энергопотребление, увеличить срок службы оборудования и повысить качество технологических процессов.
Перспективы развития преобразователей частоты
Основные направления развития преобразователей частоты для асинхронных двигателей:

- Повышение энергоэффективности
- Улучшение алгоритмов управления
- Интеграция с системами промышленной автоматизации
- Уменьшение массогабаритных показателей
- Снижение стоимости
Развитие технологий силовой электроники и микропроцессорной техники позволит создавать более совершенные и эффективные преобразователи частоты для асинхронных двигателей.
Преобразователи частоты. Различие между ними.
Настоящим прорывом в области регулируемого электропривода стало появление силовых преобразователей частоты или как их именуют в профильной среде — частотников. Это открытие кардинально изменило подход в проектировании систем электроприводов. Если относительно недавно при проектировании сложных механизмов, где без точного регулирование параметров (скорость, момент) не обойтись, выбирались двигатели постоянного тока — ДПТ, то с появлением частотников привода переменного тока начали активно вытеснять двигатели постоянного тока из данных систем. Даже в тяговых электроприводах асинхронный двигатель с коротко-замкнутым ротором вытесняет ДПТ последовательного возбуждения.
Содержание:
Классификация преобразователей частоты
Техническое устройство, преобразующее переменное напряжения одной частоты на входе, в изменяющееся по определенному закону переменное напряжение, но уже другой частотой на выходе называется преобразователем частоты (ПЧ).
- Непосредственные
- Двухзвенные
Непосредственные – это реверсивный тиристорный преобразователь. Главное его достоинство в том, что он подключается напрямую в сеть без дополнительных устройств.
Двухзвенные – представляют собой транзисторный или тиристорный преобразователь. Но главное их отличие от непосредственных преобразователей в том, что для корректной и безопасной работы инвертора необходимо звено постоянного напряжения. Соответственно для подключения их к общепромышленным сетям необходим выпрямитель. Как правило изготавливаются комплектными (инвертор и выпрямитель поставляются вместе и работают от одной системы управления).
Двухзвенные преобразователи частоты
Двухзвенный или как его еще называют со звеном постоянного тока, созданный на базе АИН (автономный инвертор напряжения), содержит в комплекте выпрямитель и фильтр:
ЭМ – электрическая машина, АИН – автономный инвертор напряжения, Lф, Сф – индуктивности и емкости фильтра, fнз – задание частоты выхода инвертора, udз – задание выходного напряжения для выпрямителя, если используются управляемые выпрямители, СУВ, СУИ – системы управления выпрямителем и инвертором соответственно, uнз – задание выходного напряжения инвертора, В – выпрямитель. Пунктиром показаны связи, которые включаются в систему в зависимости от типа устройства.
Пунктиром показаны связи, которые включаются в систему в зависимости от типа устройства.
Для улучшения качества энергии в звене постоянного напряжения и сглаживании пульсаций напряжения и тока используют L-C фильтр. Зачастую он имеют Г – образную схему включения, как показано выше. Также иногда используют фазовый сдвиг в цепи переменного напряжения путем включения обмоток трансформатора в треугольник и звезду:
Данная схема более дорогостоящая и может применяться только при использовании индивидуального трансформатора.
В данной системе выпрямитель может быть управляем или не управляем. Если он управляем, то функция регулирования напряжения ложится на него, если нет, то на АИН. Для рекуперации энергии в сеть выпрямитель должен быть полностью управляем и реверсивен (двухкомплектный). Управление частотным преобразователем производится импульсным методом. Самые распространенные методы это ШИР (широтно-импульсное регулирование) и ШИМ (широтно-импульсная модуляция).
Еще более широкое применение получили автономные инверторы тока (АИТ):
АИТ – автономный инвертор тока, СУИ, СУВ – системы управления преобразователями, УВ – управляемый выпрямитель, Lф – индуктивность фильтра, fнз – задание частоты выходного тока, іd
В отличии от АИН, где регулируемой выходной величиной является напряжение, в АИТ регулируемой величиной является ток. Немаловажную роль в формировании выходного сигнала заданной частоты является частота коммутации транзисторов или тиристоров. Чем выше частота коммутации, тем лучше качество синусоиды на выходе частотника, но возрастают потери в преобразователе. Ниже приведен результат моделирования работы АИТ (на IGBT транзисторах) на активно-индуктивную нагрузку при различных частотах коммутации:
Частота коммутации 800 ГцЧастота коммутации 2000 ГцЧастота коммутации 8000 Гц
Как видно из графиков уменьшение частоты коммутации очень плохо влияет на выходное качество тока. Поэтому для каждого устройства необходимо подбирать частоту коммутации частотника соответственно качеству выходного напряжения или тока. Для оптимизации данных процессов на выходе преобразователя частоты иногда ставят L-C фильтр, для сглаживания пульсаций токов и напряжений:
Поэтому для каждого устройства необходимо подбирать частоту коммутации частотника соответственно качеству выходного напряжения или тока. Для оптимизации данных процессов на выходе преобразователя частоты иногда ставят L-C фильтр, для сглаживания пульсаций токов и напряжений:
Как видим из схемы — последовательно подключают индуктивность, для сглаживания пульсаций тока, и параллельно емкость, для сглаживания пульсаций напряжения.
Также работа частотника генерирует высшие гармоники в питающей сети:
Ток двух фаз питающего напряженияДля уменьшения влияния высших гармоник на сеть используют фильтро-компенсирующие устройства (ФКУ)
Ниже показаны принципиальные схемы преобразователей частоты.
Автономный инвертор напряжения с управляемым выпрямителем
Тиристоры VS1-VS6 выполняют роль выпрямителя. Транзисторы VT1-VT6 преобразуют постоянное напряжение в переменное заданной частоты. Диоды VD1-VD6 защищают транзисторы от перенапряжений, а также играет роль обратного выпрямителя при торможении машины. Транзистор VT7 выполняет роль ключа для резистора торможения R
Транзистор VT7 выполняет роль ключа для резистора торможения R
Данный ПЧ не может рекуперировать энергию в сеть, а также насыщает выходное напряжение высшими гармониками и усложняет систему управления из-за необходимости управления УВ. При исполнении УВ двухкомплектным, рекуперирует энергию в сеть, но усложняет систему и делает ее более дорогостоящей. В настоящее время является устаревшим.
Автономный инвертор напряжения с неуправляемым выпрямителем
Диоды VD7-VD12 выполняют роль выпрямителя. Транзисторы VT1-VT6 преобразуют постоянное напряжение в переменное заданной частоты. Диоды VD1-VD6 защищают транзисторы от перенапряжений, а также играет роль обратного выпрямителя при торможении машины. Транзистор VT7 выполняет роль ключа для резистора торможения Rб. За счет использования ШИМ происходит регулирование амплитуды выходного напряжения и его частоты.
Транзистор VT7 выполняет роль ключа для резистора торможения Rб. За счет использования ШИМ происходит регулирование амплитуды выходного напряжения и его частоты.
При использовании неуправляемого выпрямителя для торможения двигателя АИН переводится в режим управляемого выпрямителя, работающего таким образом, что напряжение на емкости Сф выше заданного, несмотря на уменьшение скорости вращения двигателя. При увеличении напряжения на емкости Сф открывается транзистор VT7 и энергия выделяемая электродвигателем гасится на тормозном резисторе.
Данный способ торможения получил названия инверторного торможения, хотя инвертирования на самом деле нет. Это связано с тем, что термин динамическое торможение для систем с асинхронным двигателем занят, под ним понимается пропускания постоянного тока через обмотки двигателя.
Главным недостатком такой системы есть отсутствие возможности рекуперировать энергию в сеть, но она получила широкое применение для систем, где не требуется частое торможение.
Рекуперирующий двухзвенный преобразователь частоты на основе обратимого преобразователя напряжения
ОПН – обратимый преобразователь напряжения. В данной схеме имеется два ОПН. ОПН1 работает в выпрямительном режиме и передает энергию через ОПН2, работающий в инверторном режиме, к двигателю. При торможении ОПН2, подключенный к двигателю переходит в выпрямительный режим, а ОПН1, подключенный к сети, в инверторный режим. При этом происходит рекуперация энергии в сеть. Если задать схеме управления на входе cosφ = ± 1, то во всех режимах при регулировании и торможении двигателя из сети будет потребляться или в сеть будет отдаваться практически только активная мощность, а ток будет практически синусоидален, что определяет минимальное вредное влияние на питающую сеть. Эти преобразователи на сегодняшний день являются самыми близким к идеальным.
Ниже приведена функциональная схема данного устройства:
В схеме имеются следующие элементы: ОПН1, подключенный к сети, ОПН2, подключенный к двигателю, датчики тока и напряжения ДТ1 и ДН1 на стороне сети и ДТ2 и ДН2 на стороне постоянного напряжения. Требуемая мощность на стороне постоянного напряжения определяется измерением средних значений Ud и Id, а затем и мощности Pd с помощью вычислителя ВМ, куда поступают сигналы с ДН2 и ДТ2 через фильтр Ф. По действующему значению напряжения сети U1, определенному с помощью вычислителя напряжения ВН, и с учетом заданного угла φ1 определяется ток I1зад, обеспечивающий заданную мощность. Блок ФСН формирует синусоидальное напряжение, повторяющее напряжение сети, а блок «φ1» формирует заданную синусоиду с учетом фазового сдвига φ1. В блоке «ЗАД i1» формируется заданная синусоида тока. В модуляторе М она сравнивается с сигналом датчика тока ДТ1 i1, и формируются управляющие импульсы, которые через усилитель мощности УМ поступают на транзисторы. Блок НТ определяет направление тока (выпрямительный или инверторный режим). Блок выбора режима ВР в соответствии с сигналом от НТ задает угол φ1.
Требуемая мощность на стороне постоянного напряжения определяется измерением средних значений Ud и Id, а затем и мощности Pd с помощью вычислителя ВМ, куда поступают сигналы с ДН2 и ДТ2 через фильтр Ф. По действующему значению напряжения сети U1, определенному с помощью вычислителя напряжения ВН, и с учетом заданного угла φ1 определяется ток I1зад, обеспечивающий заданную мощность. Блок ФСН формирует синусоидальное напряжение, повторяющее напряжение сети, а блок «φ1» формирует заданную синусоиду с учетом фазового сдвига φ1. В блоке «ЗАД i1» формируется заданная синусоида тока. В модуляторе М она сравнивается с сигналом датчика тока ДТ1 i1, и формируются управляющие импульсы, которые через усилитель мощности УМ поступают на транзисторы. Блок НТ определяет направление тока (выпрямительный или инверторный режим). Блок выбора режима ВР в соответствии с сигналом от НТ задает угол φ1.
Преимущества двухзвенного рекуперирующего ПЧ: независимость выходной частоты от входной, возможность получения высокого коэффициента мощности на стороне сети. К недостаткам можно отнести: высокая стоимость, сложность системы управления.
К недостаткам можно отнести: высокая стоимость, сложность системы управления.
Рекуперирующие двухзвенный преобразователь частоты на основе инверторов тока
Автономный инвертор тока, преобразовывает постоянный ток, подаваемый на его вход, в пропорциональный по величине переменный ток. Режим источника тока на входе обеспечивается за счет большой индуктивности L и применения токостабилизирующей обратной связи, поддерживающей заданное значение тока Idз. АИТ выполнен по схеме с отсекающими диодами. Рекуперация энергии при торможении в АИТ возможна при сохранении направления тока за счет сдвига токов и напряжений, т.е. переводом АИТ в режим выпрямления за счет сдвига управляющих импульсов относительно фазных ЭДС электрической машины.
Энергия, передаваемая от электрической машины на сторону постоянного напряжения, должна быть далее передана в сеть переменного напряжения. Для этого управляемый выпрямитель на входе ПЧ должен быть переведен в инверторный режим. При этом сохраняется направление тока и не требуется установка дополнительного комплекта вентилей. Схема применяется в двигателях достаточно большой мощности. Недостатками схемы являются ее не очень хорошие характеристики, поэтому она не является перспективной.
При этом сохраняется направление тока и не требуется установка дополнительного комплекта вентилей. Схема применяется в двигателях достаточно большой мощности. Недостатками схемы являются ее не очень хорошие характеристики, поэтому она не является перспективной.
Появление запираемых тиристоров позволило улучшить характеристики ДПЧ на основе АИТ.
Формирование выходного тока осуществляется совместно управляемым выпрямителем и автономным инвертором тока.
Показана временная диаграмма, отражающая моменты включенного и выключенного состояний тиристора V1. На участке соответствующим зоне 2, ключ V1 включен постоянно, и ток сглаживающего дросселя непрерывно поступает в фазу А двигателя. Для формирования тока в зонах 1 и 3 необходимо соответствующим образом переключать тиристоры. Для обеспечения нарастания и спадания тока (зоны 1 и 3) обычно используется два метода – трапецеидальный и метод выборочного исключения гармоник.
При использовании первого метода моменты коммутации ключей АИТ определяются по пересечению линейно нарастающего сигнала и опорного сигнала пилообразной формы следующего с несущей частотой, при втором методе моменты коммутации ключей рассчитываются заранее исходя из условия подавления высших гармоник определенного порядка (5 и 7 и т. д.). В этой схеме улучшается синусоидальность тока, протекающего по фазам двигателя. Но сохраняются все недостатки, возникающие при питании от сети управляемых выпрямителей напряжения. Преобразователи частоты на основе инверторов тока наиболее применимы в электроприводе синхронных машин, где на выходе вместо автономного инвертора тока включается инвертор тока, ведомый электрической машиной.
д.). В этой схеме улучшается синусоидальность тока, протекающего по фазам двигателя. Но сохраняются все недостатки, возникающие при питании от сети управляемых выпрямителей напряжения. Преобразователи частоты на основе инверторов тока наиболее применимы в электроприводе синхронных машин, где на выходе вместо автономного инвертора тока включается инвертор тока, ведомый электрической машиной.
Таким образом, на входе и на выходе ПЧ включаются однокомплектные рекуперирующие преобразователи (ОРП) на тиристорах. При этом ведомый инвертор полностью аналогичен выпрямителю, подключенному к сети. Коммутация вентилей ведомого инвертора осуществляется за счет ЭДС электрической машины.При низкой скорости вращения электрической машины эта ЭДС недостаточна для коммутации вентилей. Поэтому при пуске коммутация осуществляется путем прерывания тока в цепи постоянного тока включением и запиранием выпрямителя.
Непосредственные преобразователи частоты
При использовании НПЧ напряжение из сети подается через управляемые вентили на двигатель. В каждой фазе НПЧ установлен реверсивный двухкомплектный преобразователь с совместным или раздельным управлением силовыми комплектами.
В каждой фазе НПЧ установлен реверсивный двухкомплектный преобразователь с совместным или раздельным управлением силовыми комплектами.
На рис. 1а приведена схема трехфазно-однофазного НПЧ на основе трехфазных нулевых схем. Он преобразует трехфазное напряжение в однофазное, но с регулируемой частотой.Комплекты В и Н переключаются, и на выходе получается двуполярное напряжение. Для управления преобразователями используют определенные законы управления — прямоугольный и синусоидальный. Если используют прямоугольный принцип управления, то алгоритм работы будет таков: при прохождении одной полуволны напряжения, на один из комплектов подаются управляющие импульсы с углом управления (углом задержки) a = const. Этот комплект будет работать в режиме выпрямителя, а затем с углом управления (углом опережения) b = a. Чтоб снизить ток необходимо перейти в инверторный режим (рис. 1 б). Для избежания короткого замыкания в самом инверторе необходимо чтоб ток снизился до нуля – это называется бестоковой паузой. После осуществления бестоковой паузы в работу включается второй комплект.
После осуществления бестоковой паузы в работу включается второй комплект.
Если используют синусоидальное управление, то гладкая составляющая выходного напряжения должна изменятся по синусоидальному закону, для этого угол управления a непрерывно меняется (рис. 1 в).
Рисунок 1.Схема трехфазно-трехфазного НПЧ, выполненного на основе трехфазных мостовых схем. Ниже приведена схема.
Данный тип преобразователей не получил широкого применения из-за ряда недостатков при его применении. А это: невозможность полного регулирования выходной частоты (при использовании трехфазных мостовых схем диапазон регулирования 25-45 Гц, а при нулевых 15-45 Гц). Постоянная коммутация вентилей, что приводит к ухудшению коэффициента мощности, а также плохое качество выходного напряжения и большое влияние на питающую сеть.
Преимуществом можно признать то, что у таких преобразователей более высокий КПД, из-за однократного преобразования энергии.
Наиболее распространены преобразователи частоты на базе АИТ и АИН на IGBT транзисторах, в силу лучших показателей качества энергии на выходе преобразователя и их влияния на сеть.
Преобразователь частоты. Выбор и расчет преобразователя частоты для электродвигателя.
Выбор преобразователя частоты
При определении характеристик преобразователя частоты для заданной нагрузки первым шагом является рассмотрение нагрузочных характеристик. Существуют четыре различных способа расчета требуемых выходных параметров, при этом выбор способа зависит от характеристик электродвигателя.
Нагрузочные характеристики
Прежде чем определить типоразмер преобразователя частоты, необходимо провести различие между двумя наиболее широко используемыми нагрузочными характеристиками. Нагрузочные характеристики различаются между собой следующим образом:
Рис. 1. Постоянный и квадратичный нагрузочный момент
• Когда скорость центробежных насосов и вентиляторов увеличивается, потребляемая мощность возрастает в третьей степени (Р = n3).
• Обычный рабочий диапазон центробежных насосов и вентиляторов лежит в пределах скоростей от 50 до 90 %.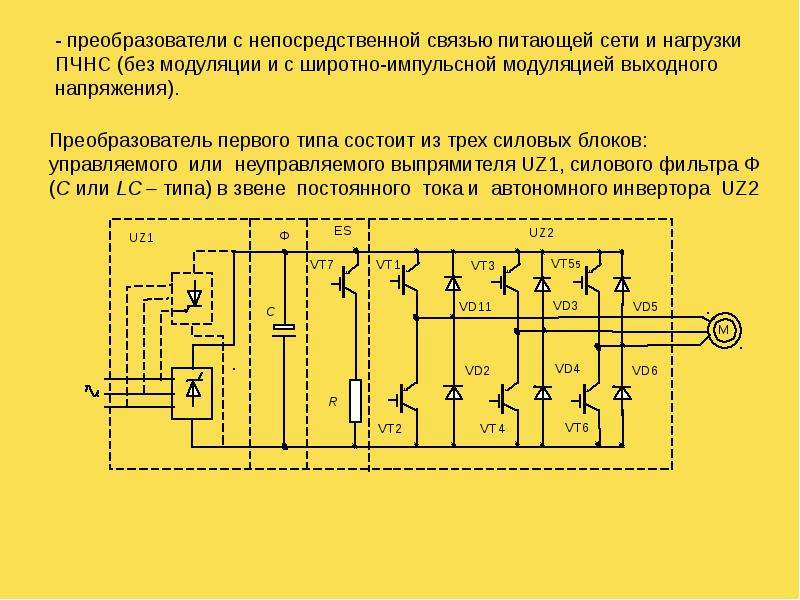 Коэффициент нагрузки возрастает пропорционально квадрату скорости, т. е. приблизительно от 30 до 80 %.
Коэффициент нагрузки возрастает пропорционально квадрату скорости, т. е. приблизительно от 30 до 80 %.
Оба эти фактора проявляются в характеристиках крутящего момента электродвигателя, управляемого преобразователем частоты.
На рис 2 и 3 показаны характеристики крутящего момента для двух типоразмеров преобразователей частоты, один из них (рис. 3) имеет меньший диапазон мощности, чем другой. Для обеих характеристик крутящего момента были заданы одинаковые нагрузочные характеристики центробежного насоса.
На рис. 2 весь рабочий диапазон насоса (0-100 %) находится в пределах номинальных значений параметров двигателя. Поскольку обычный рабочий диапазон насоса находится в пределах 30-80 %, можно выбрать преобразователь частоты с меньшей выходной мощностью.
Рис. 2. Преобразователь частоты большой мощности
Рис. 3. Преобразователь частоты малой мощности
Если нагрузочный момент постоянен, электродвигатель должен быть способен развивать крутящий момент, превышающий нагрузочный момент, поскольку избыточный крутящий момент используется для разгона.
Для разгона и обеспечения высокого начального момента, например в случае привода ленточных транспортеров, достаточен кратковременный перегрузочный момент, составляющий 60 % от момента, развиваемого преобразователем частоты. Перегрузочный крутящий момент также обеспечивает системе способность преодолевать внезапные увеличения нагрузки. Преобразователь частоты, который не допускает никакого перегрузочного момента, должен выбираться таким образом, чтобы ускоряющий крутящий момент (TB) находился в пределах номинального крутящего момента.
Рис. 4. Перегрузочный крутящий момент используется для разгона
При определении нагрузочных характеристик рассматриваются четыре разных набора технических характеристик электродвигателя, позволяющие принять решения относительно выбора типоразмера преобразователя частоты по мощности.
1. Преобразователь частоты можно выбрать быстро и точно на основе значения тока lM, который потребляет электродвигатель. Если электродвигатель загружается не полностью, его ток может быть измерен при работе аналогичной системы с полной нагрузкой.
Если электродвигатель загружается не полностью, его ток может быть измерен при работе аналогичной системы с полной нагрузкой.
Рис. 5. Выбор преобразователя частоты на основе номинального тока
Пример расчета и выбора преобразователя частоты:
Электродвигатель 7,5 kW, 3 х 400 В потребляет ток 14,73 А.
Что касается технических данных преобразователя частоты, то выбирается такой преобразователь, у которого длительный максимальный выходной ток больше или равен 14,73 А при постоянной или квадратичной характеристике крутящего момента.
Примечание:
Если преобразователь частоты выбирается на основе мощности (способы 2-4), необходимо сравнить расчетную мощность и мощность, указанную в технических данных преобразователя частоты, при одном и том же напряжении. Если преобразователь частоты рассчитывается на основе тока (способ 1), этого не требуется, поскольку выходной ток преобразователя частоты влияет на другие данные.
2. Преобразователь частоты можно выбирать на основе полной мощности SM, потребляемой электродвигателем и полной мощности, подаваемой преобразователем частоты.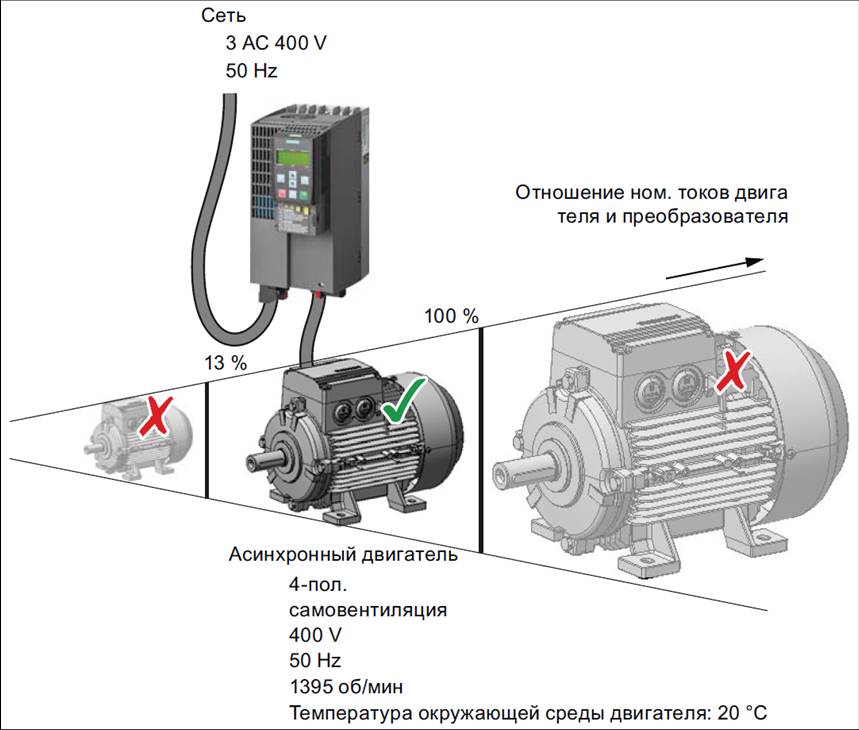
Рис. 6. Выбор преобразователя частоты на основе полной мощности
Пример расчета и выбора преобразователя частоты:
Электродвигатель 7,5 kW, 3×400 В потребляет ток 14,73 А. Sm =U х I х √3 / 1000 = 400 х 14.73 √3 / 1000= 10,2 кВА
Что касается технических данных преобразователя частоты, то выбирается такой преобразователь частоты, у которого длительная максимальная выходная мощность больше или равна 10,2 кВА при постоянной или квадратичной характеристике крутящего момента.
3. Преобразователь частоты можно также выбирать по мощности Рм, вырабатываемой электродвигателем. Однако данный способ является неточным, поскольку cos φ и коэффициент полезного действия η изменяются с нагрузкой.
Рис. 7. Выбор преобразователя частоты на основе стандартной серии электродвигателей
Пример расчета мощности электродвигателя
Электродвигатель мощностью 3 кВт, имеющий cos φ = 0,80 и η = 0,81, потребляет мощность SM= PM/(η х cos φ) = 3,0 / (0,80 х 0,81 )=4,6 кВА
Что касается технических данных преобразователя частоты, то выбирается такой преобразователь, у которого длительная максимальная выходная мощность больше или равна 4,6 кВА при постоянной или квадратичной характеристике крутящего момента.
4. На практике номинальная мощность большинства преобразователей частоты соответствует стандартной серии асинхронных электродвигателей. Поэтому преобразователи частоты часто выбирают исходя именно из этого соображения, что, однако, может привести к неточному определению их характеристик, особенно если электродвигатель не нагружается полностью.
Рис. 8. Выбор преобразователя частоты по выходной мощности на валу
Распределение тока в преобразователе частоты (cos φ (фи) электродвигателя)
Ток для намагничивания электродвигателя подается конденсатором, находящимся в промежуточной цепи преобразователя частоты. Ток намагничивания представляет собой реактивный ток, который протекает между конденсатором и электродвигателем (рис. 9).
Рис. 9. Токи в преобразователе частоты
Из сети поступает только активный ток (lW). Именно поэтому выходной ток преобразователя частоты всегда больше входного тока. Кроме активного тока из сети потребляется ток Iloss, (ток потерь).
Пример расчета
При отсутствии нагрузки ток 4-полюсного электродвигателя мощностью 1,1 кВт равен 1,6 А. Выходной ток подключенного преобразователя частоты составляет около 1,6 А, а входной ток при работе без нагрузки почти равен нулю.
Изготовители электродвигателей обычно указывают cos φ электродвигателя при номинальном токе. При меньшем значении cos φ (например, в случае реактивного синхронного электродвигателя) номинальный ток электродвигателя при одинаковых значениях мощности и напряжения будет больше, как видно из следующего уравнения:
IS = IW/ cos φ
Если преобразователь частоты выбирается по номинальному току электродвигателя (способ 1), то снижения номинального крутящего момента электродвигателя не происходит.
Конденсатор, подключенный к клеммам электродвигателя для компенсации реактивного тока, необходимо удалить. Ввиду высокой частоты коммутации преобразователя частоты конденсатор ведет себя как короткозамкнутая цепь и вызывает существенное увеличение тока электродвигателя. Преобразователь воспримет это как замыкание на землю или короткое замыкание и отключится.
Преобразователь воспримет это как замыкание на землю или короткое замыкание и отключится.
Управление скоростью электродвигателя
Выходная частота преобразователя частоты и, следовательно, скорость электродвигателя управляются одним или несколькими сигналами (0-10 В, 4-20 мА или импульсами напряжения). Когда подается сигнал на увеличение скорости, скорость электродвигателя возрастает, и вертикальная часть характеристик крутящего момента электродвигателя сдвигается вправо (рис. 10).
Рис. 10. Зависимость между управляющим сигналом и характеристиками крутящего момента электродвигателя
Если нагрузочный момент меньше, чем номинальный крутящий момент электродвигателя, скорость достигнет требуемого значения. Как показано на рис. 11, нагрузочные характеристики пересекаются с характеристиками крутящего момента электродвигателя в вертикальной части (в точке А). Если пересечение происходит в горизонтальной части (точка В), скорость электродвигателя не может длительное время превышать соответствующее значение, Преобразователь частоты допускает превышение предельного тока короткого замыкания без отключения (точка С), но продолжительность превышения обязательно должна быть ограничена по времени.
Рис. 11. Ток электродвигателя может в течение короткого времени превышать предел по току
Рампы разгона и торможения
Характеристика (рампа) разгона показывает темп, с которым происходит увеличение скорости вращения, и задается в виде времени разгона tacc. Эти рампы базируются, главным образом, на номинальной частоте электродвигателя, например, рампа разгона 5 с означает, что преобразователю частоты потребуется 5 секунд для перехода от нулевой до номинальной частоты электродвигателя (f = 50 Гц).
Рис. 12. Время разгона и торможения
Рампа торможения показывает, насколько быстро снижается скорость. Она задается в виде времени торможения tdec.
Возможен непосредственный переход от разгона к торможению, поскольку электродвигатель всегда отслеживает выходную частоту инвертора.
Если известен момент инерции вала электродвигателя, можно вычислить оптимальные значения времени разгона и торможения.
tacc= J x (n2-n1)/[(Tacc – Tfric) x 9,55]
tdec = J x (n2-n1)/[(Tacc + Tfric) x 9,55]
J — момент инерции вала электродвигателя.
Tfric – момент трения системы.
Тасс — избыточный (перегрузочный) момент, используемый для разгона.
Tdec — тормозящий момент (момент торможения), который возникает при уменьшении задания скорости.
n1 и n2— скорости вращения на частотах f1 и f2.
Если преобразователь частоты допускает кратковременный перегрузочный момент, то моменты разгона и торможения устанавливаются равными номинальному крутящему моменту электродвигателя Т. На практике время разгона и время торможения обычно одинаковы.
Пример расчета
J = 0,042 кгм2, Tfric = 0,05 x MN , n1 = 500 об/мин, n2 = 1000 об/мин, ТN = 27 Нм
tacc = J х (n2 – n1)/ [(Тасс — Tfric) х 9,55] = 0,042 х (1000 — 500)/ [(27,0 — (0,05 х 27,0)) х 9,55] = 0,1 [с]
Динамическое торможение
Когда сигнал задания скорости снижается, электродвигатель ведет себя как генератор и тормозит. Замедление при торможении зависит от величины нагрузки электродвигателя.
Электродвигатели, подключенные непосредственно к сети, отдают мощность торможения обратно в сеть.
Если электродвигатель работает от преобразователя частоты, энергия торможения сохраняется в промежуточной цепи преобразователя частоты. Если мощность, выделяемая при торможении, велика и преобразователь частоты не может рассеять ее за счет собственной конструкции, напряжение промежуточной цепи возрастает.
Напряжение промежуточной цепи может расти до тех пор, пока преобразователь частоты не будет отключен средствами защиты, и иногда к промежуточной цепи приходится подключать нагрузку в виде тормозного модуля и внешнего резистора для поглощения мощности торможения.?
Использование тормозного модуля и тормозного резистора позволяет осуществлять быстрое торможение при больших нагрузках. Однако, при этом возникают проблемы, связанные с нагревом. Другим решением является использование блока рекуперативного торможения. Такие блоки применяются для преобразователей частоты с неуправляемым выпрямителем и возвращают энергию торможения в питающую сеть.
Такие блоки применяются для преобразователей частоты с неуправляемым выпрямителем и возвращают энергию торможения в питающую сеть.
В преобразователях частоты с управляемыми выпрямителями мощность торможения может возвращаться в сеть (см. рис. 13) с помощью, например, инвертора, подключенного к выпрямителю встречно-параллельно.
Рис. 13. Включение тормозного модуля и тормозного резистора
Рис. 14. Инвертор, включенный встречно-параллельно
Другой способ торможения электродвигателя — торможение постоянным током. Для создания магнитного поля в статоре используется напряжение постоянного тока, подаваемое между двумя фазами электродвигателя. Поскольку энергия торможения остается в электродвигателе и возможен перегрев, торможение постоянным током рекомендуется использовать в диапазоне низких скоростей, чтобы не превышать номинальный ток электродвигателя. Обычно торможение постоянным током ограничивается во времени.?
Реверс
Направление вращения асинхронных электродвигателей определяется порядком следования фаз питающего напряжения.
Если поменять местами две фазы, направление вращения электродвигателя изменится, и он будет вращаться в противоположном направлении.
Большинство электродвигателей сконструировано таким образом, чтобы заставить вал двигателя вращаться по часовой стрелке, если соединение выполнено следующим образом:
Рис. 15. Направление вращения электродвигателя изменяется путем изменения порядка следования фаз
Этому же правилу отвечает и порядок следования фаз на выходных клеммах большинства преобразователей частоты.
Преобразователь частоты может осуществлять реверс электродвигателя путем изменения порядка следования фаз с помощью электроники. Реверс производится либо путем задания отрицательной скорости, либо цифровым входным сигналом. Если при первоначальном вводе в эксплуатацию требуется, чтобы электродвигатель имел определенное направление вращения, необходимо знать заводскую настройку преобразователя частоты по умолчанию.
Поскольку преобразователь частоты ограничивает ток электродвигателя номинальным значением, двигатель, управляемый преобразователем частоты, можно реверсировать чаще, чем двигатель, подключенный непосредственно к сети.
Рис. 16. Тормозной момент преобразователя частоты во время реверса
Рампы
Все преобразователи частоты имеют функции изменения скорости (рампы) для обеспечения плавной работы. Эти рампы можно изменять, и благодаря им задание скорости можно увеличивать или уменьшать в определенном интервале.
Рис. 17. Регулируемое время разгона и торможения
Угол наклона характеристики разгона/торможения (длительность разгона/торможения) можно установить таким малым, что в некоторых ситуациях электродвигатель не сможет отработать задание (не сможет разогнать/затормозить двигатель за заданное время).
Это приводит к увеличению тока электродвигателя до тех пор, пока не будет достигнут предел по току. В случае малого времени замедления (t-а) напряжение промежуточной цепи способно возрасти до такого уровня, что схема защиты преобразователя частоты остановит преобразователь.
Оптимальное время изменения скорости можно вычислить по приведенным ниже формулам.
ta = J x n/[(TN-Tfric)x9,55]
t-a = J x n/[(TN+Tfric)x9,55]
ta — время увеличения скорости
t-a— время уменьшения скорости
n — число оборотов
TN — номинальный крутящий момент электродвигателя
Tfric — момент трения
Рис. 18. Установка времени изменения скорости
Время разгона/торможения обычно выбирается исходя из номинальной скорости электродвигателя.
Текущий контроль
Преобразователи частоты могут контролировать регулируемый процесс и вмешиваться в него при неисправности.
Такой контроль может быть разделен на три вида в зависимости от объекта: контроль технологической установки, контроль электродвигателя и контроль преобразователя частоты.
Контроль установки основан на контроле выходной частоты, выходного тока и крутящего момента электродвигателя. На основании этих параметров можно устанавливать несколько пределов, превышение которых воздействует на функцию управления. Этими пределами могут быть допустимая наименьшая скорость электродвигателя (минимальная частота), допустимый наибольший ток (предел по току) или допустимый наибольший крутящий момент электродвигателя (предельный крутящий момент).
Этими пределами могут быть допустимая наименьшая скорость электродвигателя (минимальная частота), допустимый наибольший ток (предел по току) или допустимый наибольший крутящий момент электродвигателя (предельный крутящий момент).
Преобразователь частоты может быть запрограммирован, например, на подачу предупреждающего сигнала, уменьшение скорости электродвигателя или останов последнего в случае выхода его скорости за установленные пределы.
Пример
В установках, использующих для соединения электродвигателя с остальной частью системы клиновой ремень, преобразователь частоты может программироваться на контроль состояния этого ремня.
Поскольку в случае разрыва ремня выходная частота будет увеличиваться быстрее, чем определяется заданной рампой, в таких ситуациях можно использовать эту частоту для подачи предупреждения или останова электродвигателя.
Контроль электродвигателя можно производить с помощью преобразователя частоты путем мониторинга тепловой модели электродвигателя или путем подключения к электродвигателю термистора. Преобразователь частоты может предотвращать перегрузку электродвигателя, действуя подобно термореле. В вычислениях, производимых преобразователем частоты, участвует и выходная частота. Это гарантирует, что электродвигатель не будет перегружаться на малых скоростях из-за ухудшения внутренней вентиляции. Современные преобразователи частоты также способны защищать электродвигатели с принудительной вентиляцией, если ток становится слишком большим.
Преобразователь частоты может предотвращать перегрузку электродвигателя, действуя подобно термореле. В вычислениях, производимых преобразователем частоты, участвует и выходная частота. Это гарантирует, что электродвигатель не будет перегружаться на малых скоростях из-за ухудшения внутренней вентиляции. Современные преобразователи частоты также способны защищать электродвигатели с принудительной вентиляцией, если ток становится слишком большим.
Контроль преобразователя частоты традиционно производится таким образом, что в случае перегрузки по току преобразователь отключается. Некоторые преобразователи допускают кратковременную перегрузку по току. Микропроцессор в преобразователе частоты способен одновременно учитывать значение тока электродвигателя и время его приложения, что обеспечивает возможность оптимального использования преобразователя частоты без перегрузки.
По материалам Danfoss
асинхронный преобразователь частоты — это… Что такое асинхронный преобразователь частоты?
- асинхронный преобразователь частоты
Индукционная машина, предназначенная для работы в режиме преобразователя частоты.

Политехнический терминологический толковый словарь. Составление: В. Бутаков, И. Фаградянц. 2014.
- асинхронный двигатель с репульсионным пуском
- асинхронный режим работы энергосистемы
Смотреть что такое «асинхронный преобразователь частоты» в других словарях:
асинхронный преобразователь частоты — Асинхронная машина с фазным ротором, приводимая во вращение двигателем, предназначенная для преобразования частоты. [ГОСТ 27471 87] асинхронный преобразователь частоты Асинхронная машина с фазным ротором, в которой преобразование частоты… … Справочник технического переводчика
асинхронный преобразователь частоты — asinchroninis dažnio keitiklis statusas T sritis automatika atitikmenys: angl. induction frequency converter vok. asynchroner Frequenzumformer, m; Asynchronfrequenzumformer, m; Drehfeldumformer, m; Induktion Frequenzumformer, m rus.
 асинхронный… … Automatikos terminų žodynas
асинхронный… … Automatikos terminų žodynasасинхронный электропривод двойного питания — Система «преобразователь частоты двигатель», в котором обмотка статора и ротора асинхронного двигателя подключены к источнику энергии и одна из них получает питание от преобразователя частоты [ГОСТ 16593 79] Тематики электропривод … Справочник технического переводчика
Генератор повышенной частоты — электромашинный, электрическая машина, преимущественно однофазная, генерирующая ток в диапазоне частот от 100 до 10000 гц (иногда выше) и применяющаяся главным образом в качестве источника питания установок индукционного нагрева металлов … Большая советская энциклопедия
Аналого-цифровой преобразователь — Четырёхканальный аналого цифровой преобразователь Аналого цифровой преобразователь[1][2] … Википедия
Двигатель асинхронный — Асинхронная машина это электрическая машина переменного тока, частота вращения ротора которой не равна (меньше) частоте вращения магнитного поля, создаваемого током обмотки статора.
 Асинхронные машины наиболее распространённые электрические… … Википедия
Асинхронные машины наиболее распространённые электрические… … ВикипедияAsynchronfrequenzumformer — asinchroninis dažnio keitiklis statusas T sritis automatika atitikmenys: angl. induction frequency converter vok. asynchroner Frequenzumformer, m; Asynchronfrequenzumformer, m; Drehfeldumformer, m; Induktion Frequenzumformer, m rus. асинхронный… … Automatikos terminų žodynas
Drehfeldumformer — asinchroninis dažnio keitiklis statusas T sritis automatika atitikmenys: angl. induction frequency converter vok. asynchroner Frequenzumformer, m; Asynchronfrequenzumformer, m; Drehfeldumformer, m; Induktion Frequenzumformer, m rus. асинхронный… … Automatikos terminų žodynas
Induktion-Frequenzumformer — asinchroninis dažnio keitiklis statusas T sritis automatika atitikmenys: angl. induction frequency converter vok. asynchroner Frequenzumformer, m; Asynchronfrequenzumformer, m; Drehfeldumformer, m; Induktion Frequenzumformer, m rus.
 асинхронный… … Automatikos terminų žodynas
асинхронный… … Automatikos terminų žodynasasinchroninis dažnio keitiklis — statusas T sritis automatika atitikmenys: angl. induction frequency converter vok. asynchroner Frequenzumformer, m; Asynchronfrequenzumformer, m; Drehfeldumformer, m; Induktion Frequenzumformer, m rus. асинхронный преобразователь частоты, m pranc … Automatikos terminų žodynas
Что такое преобразователь частоты и для чего он нужен?
Для регулирования работы асинхронного двигателя с целью не допустить снижения его КПД применяют специальные устройства – частотные преобразователи. Их работа заключается в том, что они плавно изменяют скорость вращения двигателя, с помощью смены частоты питающего напряжения.
В данной статье мы постараемся рассмотреть ряд незаметных, на первый взгляд, особенностей в работе асинхронного электродвигателя и проанализируем, насколько важно в ходе его эксплуатации использовать частотный преобразователь.
Что может привести к неисправности?
В асинхронном двигателе напряжение для работы чаще всего поступает через последовательно включенный автоматический выключатель. То сесть данный способ запуска двигателя по другому называется — плавный пуск. Таким образом это провоцирует высокий рост тока пусковой обмотки, что для оборудования закончится весьма плачевно.
Частотный преобразователь имеет к этому важное отношение – он контролирует ток электродвигателя. Формируя необходимое напряжение нужной амплитуды и частоты, частотник подает их на двигатель. Поясним – в процессе его запуска преобразователь отдает не полную частоту, скажем, в 50 Герц, а где-то 0,1Гц (или чуть больше). То же самое и с напряжением – не все 220 В или 380 В, а около 20-30 (смотря, какие выставлены настройки).
Принцип работы преобразователя частоты для электродвигателя
Все это позволяет пропускать через обмотку статора ток оптимального значения, не выше номинального показателя, чтобы создать магнитное поле, которое, в свою очередь, вместе с созданным в обмотке током создаст крутящий момент. Что касается принципов изменения характеристик напряжения, то подробно об этом, а также о критериях выбора частотника, вы можете прочесть здесь, в одной из других наших статей. Кстати, если говорить о критериях выбора, то отметим также, что выходные токи преобразователя частоты должны быть ниже тока полного режима нагрузки.
Что касается принципов изменения характеристик напряжения, то подробно об этом, а также о критериях выбора частотника, вы можете прочесть здесь, в одной из других наших статей. Кстати, если говорить о критериях выбора, то отметим также, что выходные токи преобразователя частоты должны быть ниже тока полного режима нагрузки.
Выше мы описывали старт двигателя. Что касается разгона, то в ходе этого процесса преобразователь плавно повышает частоту и величину поступаемого напряжения, тем самым разгоняя двигатель. Главное – настроить частотник таким образом, чтобы времени на разгон уходило как можно меньше, а ток обмотки статора не был выше её номинального значения. Кроме того, важно поддерживать достаточный крутящий момент на валу.
Почему без преобразователя не обойтись? Главные преимущества его использования
Итак, преобразователь частоты дает следующие преимущества при управлении асинхронным двигателем:
- Плавный пуск и остановка электропривода
- Управление производительностью оборудования
- Установка оптимальных режимов работы
- Взаимное согласование электроприводов в сложных системах
Самые важные – это 1 и 2 пункты. Почему именно они?
Почему именно они?
Плавный пуск позволяет наращивать скорость постепенно, что позволяет не допустить скачков тока. Неконтролируемые скачки опасны, так как при прямом пуске они превышают номинальные показатели в 5-7 раз, что может спровоцировать высокую нагрузку на электросеть, защитит оборудование от перегрузок и сэкономит деньги на затратах электроэнергии.
Что касается управления производительностью, то в этом случае преобразователь частоты контролирует скорость работы электродвигателя с учетом «реальных нужд» в системе в целом. Это также помогает напрасно не тратить энергию и гарантирует её экономию в 30-60%.
Помимо 4-х основных преимуществ описанных выше, использование преобразователя обеспечивает следующие преимущества:
- Понижение величины пусковых токов в 4-6 раз
- Регулировка частоты и напряжения с экономией до 50% электроэнергии
- Самостоятельное выключение контактора, снятие напряжения и с его плавной подачей в звено постоянного тока
- Устранение ударных нагрузок, защита двигателя от механической перегрузки, либо недогрузки
- Понижение общего числа ненужных отключений при ударных нагрузках
- Обеспечение нужной величины и частоты при запуске оборудования, поддержание обратной связи смежных приводов
- Контроль скорости вращения ротора и анализ работы двигателя
Классификация частотных преобразователей
В первую очередь, данные устройства различаются по режимам работы:
- Амплитудно-частотное регулирование (скалярное) – применяются в обычных установках с вентиляторами, насосами, тележками, транспортерами и т.
 д. где не требуется стабилизация оборотов двигателя
д. где не требуется стабилизация оборотов двигателя - Векторное регулирование – используются на любом оборудовании, где возможны резкие изменения крутящего момента на валу, причем в большом диапазоне и где нужна высокая стабильность оборотов на валу электродвигателя.
По типу питания:
- Низковольтный 0,4 кВ
- Среднее напряжение 0,69 кВ
- Высоковольтный 6 и 10 кВ
Также данные устройства бывают с промежуточным звеном (связью) и без него. О характере работы таких устройств читайте тут, в ещё одной нашей статье.
Настройка
Настройка преобразователей выполняется строго по инструкции производителя и с учетом особенностей задачи, которая решается посредством оборудования, в котором установлен двигатель.
Например, если применяется асинхронный двигатель скалярного типа, то амплитуду сигнала и выходную частоту устанавливают по определенной формуле. Для других видов двигателя обычно используют датчики скорости вращения вала двигателя. Последовательность этапов алгоритма настройки мы перечислили здесь, в другом нашем материале.
Для других видов двигателя обычно используют датчики скорости вращения вала двигателя. Последовательность этапов алгоритма настройки мы перечислили здесь, в другом нашем материале.
Можно ли отказаться от частотных преобразователей?
Можно. Но лучше этого не делать. Безусловно, скорость вращения можно также регулировать и при помощи гидравлической муфты или механического вариатора и других. Но данные приспособления неэкономичны (а в промышленности это крайне важно!), у них узкий диапазон регулирования, что доставляет серьезные неудобства в ходе эксплуатации, а также они гораздо быстрее выйдут из строя.
Итоги: почему нужно использовать преобразователи частоты?
Вот основной перечень преимуществ для работы оборудования, которые вы получаете, используя преобразователи:
- Плавный пуск и плавную остановку оборудования
- Эффективную защиту от перегрузок и бросков напряжения
- Возможность эксплуатации оборудования с большими номинальными сетевыми напряжениями и токами
- Понижение энергопотребления
- Стабильность технологического процесса и улучшение КПД
Итак, это наиболее важная информация о частотных преобразователях, которую мы хотели до вас донести. В завершение скажем о том, от чего зависит стоимость и на что стоит обращать внимание при выборе. Это такие факторы, как марка производителя, модель и тип управления преобразователем. Также стоит обращать внимание при выборе на тип и уровень мощности двигателя, его диапазон и точность, а также степень точности поддержки крутящего момента.
В завершение скажем о том, от чего зависит стоимость и на что стоит обращать внимание при выборе. Это такие факторы, как марка производителя, модель и тип управления преобразователем. Также стоит обращать внимание при выборе на тип и уровень мощности двигателя, его диапазон и точность, а также степень точности поддержки крутящего момента.
Преобразователи частоты для ваших приводов
Являясь одним из ведущих изготовителей приводной техники, к нашим механическим компонентам мы, конечно же, предлагаем и подходящую преобразовательную технику. Мы разрабатываем и производим приводные преобразователи и преобразователи частоты для управления и регулирования приводов в машинах и установках. И это не только для централизованного монтажа в электрошкафу или для настенного монтажа, но и для децентрализованного монтажа.
Что такое преобразователь частоты?
Преобразователи частоты – это электронные устройства, которые позволяют регулировать частоту вращения асинхронного двигателя. Обоснование: Если электрические машины или асинхронные двигатели работают непосредственно от сети переменного напряжения, у них есть только одна фиксированная частота вращения – в зависимости от числа полюсов и частоты местной электросети. Однако если приводной системе или производственному процессу требуется изменяемое переменное напряжение, т. е. регулируемая скорость, то применяются преобразователи частоты. Из фиксированного переменного напряжения они могут вырабатывать переменное напряжение с изменяемой амплитудой (величиной выходного напряжения) и частотой.
Обоснование: Если электрические машины или асинхронные двигатели работают непосредственно от сети переменного напряжения, у них есть только одна фиксированная частота вращения – в зависимости от числа полюсов и частоты местной электросети. Однако если приводной системе или производственному процессу требуется изменяемое переменное напряжение, т. е. регулируемая скорость, то применяются преобразователи частоты. Из фиксированного переменного напряжения они могут вырабатывать переменное напряжение с изменяемой амплитудой (величиной выходного напряжения) и частотой.
Как работает преобразователь частоты?
>Преобразователь частоты подключается перед двигателем, чтобы создавать соответствующее потребностям, изменяемое переменное напряжение. Таким образом, уже не электросеть создает частоту и величину напряжения, с которыми работает двигатель, а преобразователь частоты берет на себя эту задачу и регулирует выходную частоту и выходное напряжение.
Большое преимущество преобразователя частоты? С его помощью вы плавно изменяете частоту вращения двигателя почти от нуля до нужного номинального уровня и заметно расширяете ее диапазон. При этом вращающий момент двигателя остается неизменным. Таким образом пользователи оборудования всегда могут адаптировать свою приводную технику к текущим условиям. Кроме того, преобразователь частоты позволяет быстро менять направление вращения. Чтобы изменить порядок следования фаз, достаточно простого управляющего сигнала. После этого подключенный асинхронный двигатель будет работать в противоположном направлении.
При этом вращающий момент двигателя остается неизменным. Таким образом пользователи оборудования всегда могут адаптировать свою приводную технику к текущим условиям. Кроме того, преобразователь частоты позволяет быстро менять направление вращения. Чтобы изменить порядок следования фаз, достаточно простого управляющего сигнала. После этого подключенный асинхронный двигатель будет работать в противоположном направлении.
Какие типы преобразователей существуют?
Бывают преобразователи с управлением по току и с управлением по напряжению. В работе они различаются следующим образом:
- Преобразователи частоты с управлением по току поддерживают отношение тока к частоте (I/f) всегда постоянным и применяются в верхнем мегаваттном диапазоне.
- А в нижнем мегаваттном и в киловаттном диапазонах последним словом техники являются преобразователи частоты с управлением по напряжению. Они поддерживают на постоянном уровне отношение напряжения к частоте: То есть если двигатель, рассчитанный на напряжение 230 В и частоту 50 Гц, должен работать с частотой 25 Гц, то и напряжение уменьшается вдвое до 115 В.

Проще говоря, в преобразователе частоты с управлением по напряжению происходит следующее: На входе имеется выпрямитель, который преобразует переменное напряжение электросети в постоянное напряжение. Затем это постоянное напряжение сглаживается и стабилизируется звеном постоянного тока. Далее действующий со стороны двигателя инвертор генерирует переменное напряжение с выходной частотой, необходимой для приводной системы. Получаемое при этом отношение „напряжение/частота“ определяет необходимую частоту вращения двигателя. Задание или расчет необходимой частоты вращения выполняет встроенный блок управления, который соединяет друг с другом все компоненты.
Где применяются преобразователи?
Преобразователи частоты используются в самых разных отраслях и задачах промышленности. Будь то приводы насосов и вентиляторов, обрабатывающих станков, конвейеров и сборочных линий, кранов или роботизированных систем: представить себе промышленное производство без преобразователей частоты уже невозможно. Ведь там адаптированная или непрерывно регулируемая частота вращения обеспечивает оптимизированные технологические процессы – с тем дополнительным преимуществом, что приводы с регулированием частоты вращения способствуют экономии энергии при работе
Ведь там адаптированная или непрерывно регулируемая частота вращения обеспечивает оптимизированные технологические процессы – с тем дополнительным преимуществом, что приводы с регулированием частоты вращения способствуют экономии энергии при работе
Преобразователи для любых установок и машин
В зависимости от спроса и требований наши преобразователи частоты доступны в различных исполнениях и с множеством дополнительных функций. К тому же очень важно, где нужно разместить преобразователь частоты – на стене, в центральном и защищенном месте в электрошкафу или прямо в цеху, то есть децентрализованно. И в зависимости от того, насколько проста или сложна та или иная приводная система, применяются либо простые преобразователи частоты, либо так называемые специальные преобразователи с большим объемом функций или многоосевые сервоусилители
SEW-EURODRIVE был первой компанией, которая разработала децентрализованную технику и вывела на рынок соответствующие преобразователи частоты и мехатронные приводы. С их помощью пользователи оборудования значительно сокращают затраты на монтаж и создают себе много возможностей для модульного построения своих систем, независимых от электрошкафа. Кроме того, в нашем ассортименте в области преобразовательной техники есть устройства рекуперации энергии в сеть, которые комбинируются с одним или несколькими преобразователями частоты и приводными преобразователями. Также мы предлагаем простые пускатели двигателя для встраивания в
С их помощью пользователи оборудования значительно сокращают затраты на монтаж и создают себе много возможностей для модульного построения своих систем, независимых от электрошкафа. Кроме того, в нашем ассортименте в области преобразовательной техники есть устройства рекуперации энергии в сеть, которые комбинируются с одним или несколькими преобразователями частоты и приводными преобразователями. Также мы предлагаем простые пускатели двигателя для встраивания в
Преобразователи частоты для монтажа в электрошкафу
От простого преобразователя до стандартного или специального преобразователя и далее до модульного сервопреобразователя – мы предлагаем вам широкий ассортимент приводной электроники для централизованного размещения в электрошкафу или распределительном щите:
Преобразователи частоты для настенного монтажа
Еще одна и при этом менее затратная возможность централизованного размещения преобразователей частоты – это настенный монтаж.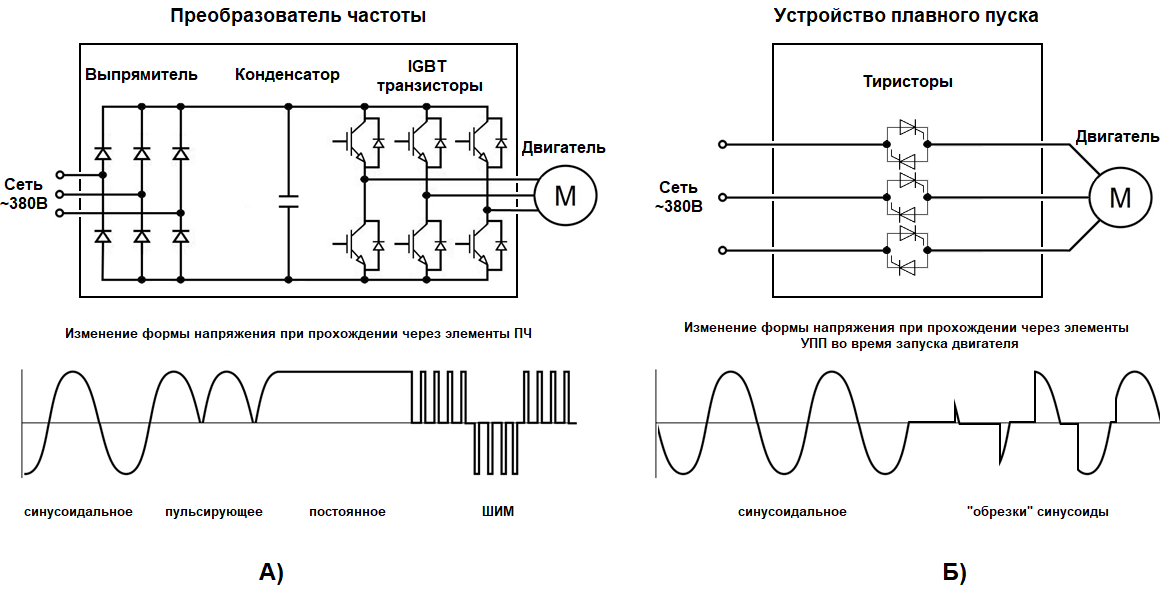 Он всегда используется в тех случаях, когда приобретать дорогой электрошкаф нерационально. Наши преобразователи частоты, которые подходят для такого способа монтажа, имеют соответствующую степень защиты от IP 54 до IP 66 (для пыльных и влажных условий окружающей среды).
Он всегда используется в тех случаях, когда приобретать дорогой электрошкаф нерационально. Наши преобразователи частоты, которые подходят для такого способа монтажа, имеют соответствующую степень защиты от IP 54 до IP 66 (для пыльных и влажных условий окружающей среды).
Пускатели двигателя для децентрализованного монтажа
Достаточно ли для вашей приводной системы функции именно преобразователя? Или вам нужно простое включение/выключение двигателя или переключение направления вращения двигателя с левого на правое? Подходящие продукты в ассортименте SEW-EURODRIVE найдутся и для этого случая:
Преобразователи частоты для децентрализованного монтажа
Для размещения вашей приводной электроники рядом с двигателем или мотор-редуктором мы предлагаем широкий выбор преобразователей частоты: от простого преобразователя с настройкой темпа для надежного применения в простых системах до стандартного преобразователя с расширенными функциями регулирования и далее до свободно программируемого специального преобразователя для систем сложной архитектуры. А если вам нужно децентрализованным образом реализовать многоосевые перемещения, а также системы с цепочкой рабочих модулей, то лучшим выбором будут многоосевые сервоусилители. Децентрализованные преобразователи в нашем ассортименте:
А если вам нужно децентрализованным образом реализовать многоосевые перемещения, а также системы с цепочкой рабочих модулей, то лучшим выбором будут многоосевые сервоусилители. Децентрализованные преобразователи в нашем ассортименте:
Преобразователь частоты для асинхронного и синхронного двигателя
Данная политика конфиденциальности относится к сайту под доменным именем instart-info.ru. Эта страница содержит сведения о том, какую информацию мы (администрация сайта) или третьи лица могут получать, когда вы пользуетесь нашим сайтом.
Данные, собираемые при посещении сайта
Персональные данные
Персональные данные при посещении сайта передаются пользователем добровольно, к ним могут относиться: имя, фамилия, отчество, номера телефонов, адреса электронной почты, адреса для доставки товаров или оказания услуг, реквизиты компании, которую представляет пользователь, должность в компании, которую представляет пользователь, аккаунты в социальных сетях; поля форм могут запрашивать и иные данные.
Эти данные собираются в целях оказания услуг или продажи товаров, связи с пользователем или иной активности пользователя на сайте, а также, чтобы отправлять пользователям информацию, которую они согласились получать.
Мы не проверяем достоверность оставляемых данных, однако не гарантируем качественного исполнения заказов или обратной связи с нами при некорректных данных.
Данные собираются имеющимися на сайте формами для заполнения (например, регистрации, оформления заказа, подписки, оставления отзыва, обратной связи и иными).
Формы, установленные на сайте, могут передавать данные как напрямую на сайт, так и на сайты сторонних организаций (скрипты сервисов сторонних организаций).
Также данные могут собираться через технологию cookies (куки) как непосредственно сайтом, так и скриптами сервисов сторонних организаций. Эти данные собираются автоматически, отправку этих данных можно запретить, отключив cookies (куки) в браузере, в котором открывается сайт.
Не персональные данные
Кроме персональных данных при посещении сайта собираются не персональные данные, их сбор происходит автоматически веб-сервером, на котором расположен сайт, средствами CMS (системы управления сайтом), скриптами сторонних организаций, установленными на сайте. К данным, собираемым автоматически, относятся: IP адрес и страна его регистрации, имя домена, с которого вы к нам пришли, переходы посетителей с одной страницы сайта на другую, информация, которую ваш браузер предоставляет добровольно при посещении сайта, cookies (куки), фиксируются посещения, иные данные, собираемые счетчиками аналитики сторонних организаций, установленными на сайте.
Эти данные носят неперсонифицированный характер и направлены на улучшение обслуживания клиентов, улучшения удобства использования сайта, анализа посещаемости.
Предоставление данных третьим лицам
Мы не раскрываем личную информацию пользователей компаниям, организациям и частным лицам, не связанным с нами. Исключение составляют случаи, перечисленные ниже.
Данные пользователей в общем доступе
Персональные данные пользователя могут публиковаться в общем доступе в соответствии с функционалом сайта, например, при оставлении отзывов, может публиковаться указанное пользователем имя, такая активность на сайте является добровольной, и пользователь своими действиями дает согласие на такую публикацию.
По требованию закона
Информация может быть раскрыта в целях воспрепятствования мошенничеству или иным противоправным действиям; по требованию законодательства и в иных случаях, предусмотренных законом.
Для оказания услуг, выполнения обязательств
Пользователь соглашается с тем, что персональная информация может быть передана третьим лицам в целях оказания заказанных на сайте услуг, выполнении иных обязательств перед пользователем. К таким лицам, например, относятся курьерская служба, почтовые службы, службы грузоперевозок и иные.
Сервисам сторонних организаций, установленным на сайте
На сайте могут быть установлены формы, собирающие персональную информацию других организаций, в этом случае сбор, хранение и защита персональной информации пользователя осуществляется сторонними организациями в соответствии с их политикой конфиденциальности.
Сбор, хранение и защита полученной от сторонней организации информации осуществляется в соответствии с настоящей политикой конфиденциальности.
Как мы защищаем вашу информацию
Мы принимаем соответствующие меры безопасности по сбору, хранению и обработке собранных данных для защиты их от несанкционированного доступа, изменения, раскрытия или уничтожения, ограничиваем нашим сотрудникам, подрядчикам и агентам доступ к персональным данным, постоянно совершенствуем способы сбора, хранения и обработки данных, включая физические меры безопасности, для противодействия несанкционированному доступу к нашим системам.
Ваше согласие с этими условиями
Используя этот сайт, вы выражаете свое согласие с этой политикой конфиденциальности. Если вы не согласны с этой политикой, пожалуйста, не используйте наш сайт. Ваше дальнейшее использование сайта после внесения изменений в настоящую политику будет рассматриваться как ваше согласие с этими изменениями.
Отказ от ответственности
Политика конфиденциальности не распространяется ни на какие другие сайты и не применима к веб-сайтам третьих лиц, которые могут содержать упоминание о нашем сайте и с которых могут делаться ссылки на сайт, а также ссылки с этого сайта на другие сайты сети Интернет. Мы не несем ответственности за действия других веб-сайтов.
Изменения в политике конфиденциальности
Мы имеем право по своему усмотрению обновлять данную политику конфиденциальности в любое время. В этом случае мы опубликуем уведомление на главной странице нашего сайта. Мы рекомендуем пользователям регулярно проверять эту страницу для того, чтобы быть в курсе любых изменений о том, как мы защищаем информацию пользователях, которую мы собираем. Используя сайт, вы соглашаетесь с принятием на себя ответственности за периодическое ознакомление с политикой конфиденциальности и изменениями в ней.
Как с нами связаться
Если у вас есть какие-либо вопросы о политике конфиденциальности, использованию сайта или иным вопросам, связанным с сайтом, свяжитесь с нами:
8 800 222 00 21
Преобразователи частоты для асинхронных двигателей: принцип действия и принцип действия
Сегодня в промышленности очень часто встречаются преобразователи частоты для асинхронных двигателей. Стоит отметить, что эти двигатели имеют в своей конструкции три обмотки, соединенные по схеме «звезда» или «треугольник». Но у них есть один недостаток — регулировать частоту вращения ротора очень сложно. Но это было раньше. Теперь, когда на помощь приходит микро- и силовая электроника, эта задача упрощается. Вращение переменного резистора позволяет изменять скорость вращения в широком диапазоне.
Для чего нужен преобразователь частоты?
Функций у этого устройства много, но чаще всего используется небольшое количество. Фактически, чтобы управлять асинхронным двигателем, вы должны иметь возможность регулировать не только скорость вращения, но также время ускорения и замедления. Кроме того, любая система требует защиты. Необходимо, чтобы преобразователь частоты учитывал ток, потребляемый асинхронным двигателем.
Частое использование частоты в системах вентиляции.Несмотря на кажущуюся легкость крыльчатки вентилятора, нагрузки на ротор очень велики. И мгновенное ускорение невозможно. Также существуют ситуации, когда необходимо увеличить скорость вращения, чтобы воздушный поток становился больше или меньше. Но это всего лишь пример, преобразователь частоты часто используется в других системах. С помощью частотника можно синхронизировать скорость конвейера, который состоит из нескольких лент.
Как работает инвертор
В основе лежит микропроцессорное управление и несколько схем преобразования переменного и постоянного напряжения.Несколько процессов происходят с напряжением, которое подается на вход питания устройства. Работа преобразователя частоты несложная, достаточно рассмотреть три шага. Сначала происходит выпрямление. Во-вторых, фильтрация. В-третьих, инвертирование — это преобразование постоянного тока в переменный.
Только на последнем этапе возможно изменение свойств и текущих параметров. Изменяя токовые характеристики, можно регулировать скорость вращения ротора асинхронного двигателя.В инверторном каскаде используются мощные сборки транзисторов. Эти элементы имеют три выхода — два силовых и один управляющий. Величина подаваемого на последний сигнала зависит от вольт-амперной характеристики на выходе частотника.
Как заменить инвертор?
Преобразователи частоты для асинхронных двигателей начали применяться сравнительно недавно. Но наука шла к ним постепенно, сначала скорость вращения ротора меняли с помощью шестерен или вариатора.Правда, это управление было очень громоздким, да и мощность привода тратилась зря из-за ненужных механизмов. Ременный привод помог увеличить скорость вращения, но здесь она составила ve
Герц (Гц) в рад / сек преобразователь
КалькуляторГерц в рад / сек
Введите частоту в герцах и нажмите кнопку Calc :
Калькулятор преобразованиярад / с в Гц ►
Как рассчитать рад / сек из герц
1 Гц = 2π рад / с = 6.2831853 рад / с
или
1 рад / с = 1 / 2π Гц = 0,1591549 Гц
Герц в рад / с формула
Угловая частота или угловая скорость ω в радианах в секунду (рад / с) равна 2π умноженной на частоту f в герцах (Гц):
ω (рад / с) = 2π × f (Гц)
Пример
Вычислить угловую скорость в рад / с для частоты 300 Гц:
ω (рад / с) = 2π × 300 Гц = 1884.956 рад / с
Таблица преобразованияГерц в рад / сек
| Гц (Гц) |
рад в секунду (рад / с) |
|---|---|
| 0 Гц | 0 рад / с |
| 1 Гц | 6,28 рад / с |
| 2 Гц | 12,57 рад / с |
| 3 Гц | 18,85 рад / с |
| 4 Гц | 25,13 рад / с |
| 5 Гц | 31,42 рад / с |
| 6 Гц | 37.70 рад / с |
| 7 Гц | 43,98 рад / с |
| 8 Гц | 50,27 рад / с |
| 9 Гц | 56,55 рад / с |
| 10 Гц | 62,83 рад / с |
| 20 Гц | 125,66 рад / с |
| 30 Гц | 188,50 рад / с |
| 40 Гц | 251,33 рад / с |
| 50 Гц | 314,16 рад / с |
| 60 Гц | 376.99рад / с |
| 70 Гц | 439,82рад / с |
| 80 Гц | 502,65рад / с |
| 90 Гц | 565,49рад / с |
| 100 Гц | 628,32рад / с |
| 200 Гц | 1256,64рад / с |
| 300 Гц | 1884,96рад / с |
| 400 Гц | 2513,27рад / с |
| 500 Гц | 3141,59рад / с |
| 600 Гц | 3769.91рад / с |
| 700 Гц | 4398,23рад / с |
| 800 Гц | 5026,55рад / с |
| 900 Гц | 5654,87рад / с |
| 1000 Гц | 6283,19рад / с |
| 2000 Гц | 12566,37рад / с |
| 3000 Гц | 18849,56рад / с |
| 4000 Гц | 25132,74рад / с |
| 5000 Гц | 31415.93рад / с |
| 6000 Гц | 37699,11рад / с |
| 7000 Гц | 43982,30рад / с |
| 8000 Гц | 50265,48рад / с |
| 9000 Гц | 56548,67рад / с |
| 10000 Гц | 62831,85рад / с |
Калькулятор преобразования
рад / с в Гц ►
См. Также
Калькулятор преобразованиярад / сек в герц (Гц)
Рад / сек в герцах калькулятор
Введите угловую скорость в рад / с и нажмите кнопку Calc :
Калькулятор преобразованияГц в рад / с ►
Как рассчитать герц из рад / сек
1 Гц = 2π рад / с = 6.2831853 рад / с
или
1 рад / с = 1 / 2π Гц = 0,1591549 Гц
Рад / с в герц, формула
частота f в герцах (Гц) равна угловой частоте или угловой скорости ω в радианах в секунду (рад / с), деленной на 2π:
f (Гц) = ω (рад / с) / 2π
Пример
Вычислить частоту в герцах по угловой скорости 300 рад / с:
f (Гц) = 300рад / с / 2π = 47.75 Гц
Таблица преобразования рад / с в герцы
| Рад в секунду (рад / с) |
Герц (Гц) |
|---|---|
| 0 рад / с | 0 Гц |
| 1 рад / с | 0,1592 Гц |
| 2 рад / с | 0,3183 Гц |
| 3 рад / с | 0,4775 Гц |
| 4 рад / с | 0,6366 Гц |
| 5 рад / с | 0,7958 Гц |
| 6 рад / с | 0.9549 Гц |
| 7 рад / с | 1,1141 Гц |
| 8 рад / с | 1,2732 Гц |
| 9 рад / с | 1,4324 Гц |
| 10 рад / с | 1,5915 Гц |
| 20 рад / с | 3,1831 Гц |
| 30 рад / с | 4,7746 Гц |
| 40 рад / с | 6.3662 Гц |
| 50 рад / с | 7,9577 Гц |
| 60рад / с | 9.5493 Гц |
| 70рад / с | 11,1408 Гц |
| 80рад / с | 12,7324 Гц |
| 90рад / с | 14,3239 Гц |
| 100рад / с | 15,9155 Гц |
| 200рад / с | 31,83 10 Гц |
| 300рад / с | 47,7465 Гц |
| 400рад / с | 63,6620 Гц |
| 500рад / с | 79,5775 Гц |
| 600рад / с | 95.493 Гц |
| 700рад / с | 111,4085 Гц |
| 800рад / с | 127,3240 Гц |
| 900рад / с | 143,2394 Гц |
| 1000рад / с | 159,1549 Гц |
Калькулятор преобразования
Гц в рад / с ►
См. Также
Статический преобразователь частоты для газовой турбины
Фактически на заводе генератор, компрессор и газовые турбины находятся на одном валу.Я сомневаюсь, что если мы используем статический преобразователь частоты, то мы можем начать с подачи низкой частоты на статор … а если частота низкая, то магнитная блокировка между статором и ротором может иметь место непосредственно (без возбуждения) и после что мы можем увеличить частоту статора, и после достижения, скажем, 75% скорости турбина будет самоподдерживающейся, и питание статического преобразователя частоты может быть отключено, когда ротор приводится в движение газовыми турбинами, тогда в этот момент, если мы дадим возбуждение он может работать как синхронный генератор.Второй случай с вращающимся трансформатором не реализуется. Я сомневаюсь, что если статический преобразователь частоты служит цели магнитной блокировки, давая низкую частоту, то почему возбуждение требуется вначале. Мы можем возбуждать, когда газовая турбина становится самоподдерживающейся и приводит в движение наш ротор, а затем, чтобы сделать его синхронным, мы можем возбуждать почти с синхронной скоростью.
Если у вас есть возможность применить возбуждение из состояния покоя (через контактные кольца или «вращающийся трансформатор»), вы должны полностью относиться к нему как к синхронному двигателю.Ваша основная проблема будет заключаться в согласовании напряжения возбуждения и статического преобразователя частоты.
На практике я видел отдельный асинхронный двигатель, используемый в качестве стартера, со статическим преобразователем частоты, с номинальным выходным напряжением статического преобразователя частоты, намного превышающим номинальное напряжение для двигателя, и приводящим двигатель в действие значительно выше его номинального. скорость, как если бы вы управляли 6-полюсным двигателем на 150 Гц. В течение короткого периода запуска двигатель будет хорошо и действительно перегружен, но у него будет достаточно времени, чтобы остыть между каждой попыткой запуска.
Одна из возможностей состоит в том, что статический преобразователь частоты может запускать газовую турбину, полагаясь на демпферную обмотку генератора так же, как обмотки ротора асинхронного двигателя, и совершенно другая возможность может заключаться в том, что возбуждение включено с самого начала, и запуск генератора как синхронный двигатель.
Синхронный двигатель не запустился с нулевой скорости. Это требует синхронной скорости. Но для запуска газовой турбины другое дело: генератор используется как двигатель, а не как синхронный двигатель.Он использовал принцип циклического преобразователя, то есть последовательно включал и выключал сигнал на обмотку, чтобы заставить генератор вращаться.
Блок-схема и основные компоненты
Преобразователь частоты используется для синхронного двигателя в нескольких случаях. Во-первых, изменить скорость вращения ротора. Во-вторых, для настройки, например времени торможения и разгона, изменения степени защиты. В-третьих, преобразовать однофазное напряжение в трехфазное. Не всегда возможно реализовать питание асинхронного двигателя от трехфазной сети.И для нормальной работы и достижения максимальной мощности это как раз такая сеть. К сожалению, сделать трехфазное напряжение в частных домах довольно сложно. Преобразователь частоты позволяет добиться нужной мощности двигателя.
Выпрямительный каскад
Любой преобразователь, даже самой сложной по структуре, имеет в своем составе несколько блоков. Первый — это выпрямительный каскад, который служит для преобразования переменного тока в постоянный. В зависимости от того, какая сеть запитана, должны использоваться разные схемы выпрямителя.Таким образом, при включении в сеть однофазного переменного тока достаточно использовать однополупериодный выпрямитель. Стоит отметить, что ротор асинхронного двигателя имеет короткозамкнутые витки, поэтому ему не требуется питание.
Можно реализовать с помощью одного полупроводникового диода. Но лучшие характеристики у мостового выпрямителя: меньше потерь напряжения. Кремний используется как полупроводник. Если вы решили самостоятельно изготовить преобразователь частоты для асинхронного двигателя, то для выпрямителя необходимо подбирать элементы по величине обратного тока, проводимости.Это улучшит характеристики устройства.
Блок фильтров напряжения
После выпрямительного каскада — блок-фильтры. В самом простом варианте это дроссель (дроссель), включенный в плюсовый зазор. Между плюсом и минусом включается электролитический конденсатор. С его помощью вы избавитесь от всех переменных, которые остаются в выпрямленном напряжении. В результате снимаются все пульсации. Если подключить выход фильтра к осциллографу и посмотреть на монитор, то можно увидеть, что линии прямые, без лишних пульсаций.
Но схема асинхронного двигателя такова, что он может питаться только переменным током. А на выходе фильтра стоит постоянная. Поэтому требуется вернуть все на свои места, сделать из постоянного напряжения переменное. И его значение должно быть 220 вольт (при измерении между фазой и нулем). А фаз — три. Только при таком условии можно будет обеспечить работу асинхронного двигателя в штатном режиме.
Блок инвертора
Этот каскад служит для преобразования
A Простой преобразователь частоты в напряжение | Блог Математических встреч
Цитата дня
Мы то, что делаем постоянно. Таким образом, совершенство — это не действие, а привычка.
— Аристотель
Введение
Рисунок 1: Пояснение, почему мне нужен преобразователь напряжения в частоту.
Я часто создаю небольшие электронные изделия для дома.Недавно я собрал небольшой интерфейс датчика, который генерирует синусоидальную волну на выходе с частотой, пропорциональной индуктивности датчика. В своем приемнике я хочу преобразовать эту частоту в напряжение, пропорциональное индуктивности датчика. Я хочу отправить текстовое сообщение, когда значение индуктивности датчика превышает пороговый уровень — я обнаруживаю присутствие автомобиля (рисунок 1).
Поскольку это домашний проект, я хочу, чтобы он был простым и дешевым. В этом сообщении в блоге рассказывается, как я разработал эту схему.
Фон
Схема, которую я использовал, представляет собой очень небольшую вариацию схемы накачки заряда, которую я видел много лет назад в замечательной маленькой книге Томаса Хемингуэя «Справочник разработчика электроники» (рис. 13.5). Эту маленькую жемчужину можно посмотреть онлайн здесь. Единственное изменение, которое я внес в эту схему, — это сдвиг уровней напряжения, чтобы мой входной сигнал был положительным.
Я получу выражение для передаточной функции входной частоты к выходному напряжению, которое будет немного более точным, чем то, что выводит Хемингуэй.Однако это его схема, и его книгу все же стоит прочитать тем, кто интересуется проектированием на уровне транзисторов. Как видите, эта книга была впервые опубликована в 1966 году, и я до сих пор пользуюсь ею почти пятьдесят лет спустя.
Анализ
В этом разделе блога я сосредоточусь на результатах моделирования. В Приложении А приведены данные измерений рабочей цепи в полевых условиях.
Схема
На рис. 2 показана схема LTSpice собранной мной схемы.
Рисунок 2: Простой преобразователь частоты в напряжение.
Теория работы
Качественное описание
Принцип работы схемы довольно прост.
- Когда входной сигнал становится низким, C 1 заряжается через D 1 . Очень важно, чтобы C 1 заряжались быстро относительно периода. Эта схема зависит от передачи фиксированного количества заряда с той же скоростью, что и входной сигнал. Это означает, что скорость передачи заряда (т.е.е. ток) прямо пропорционален входной частоте.
- Когда входной сигнал становится высоким, C 1 разряжается через Q 1 в C 2 . C 2 будет иметь достаточно емкости, чтобы гарантировать, что она мало изменится при разряде C 1 . Это обеспечит необходимую фильтрацию для плавного выходного напряжения.
- RC-фильтр, состоящий из R 1 и C 2 .R имеет решающее значение для определения коэффициента усиления (т. Е. Крутизны) зависимости выходного напряжения от частоты. В состоянии равновесия потеря заряда через R 1 для каждого цикла ввода в точности равна заряду на C 1 .
Ниже я привел результаты моделирования, которые ясно показывают каждую из этих операций.
Если вам требуется более подробное описание того, как работает эта схема, см. Комментарии к обсуждению ниже. Читатель составил отличную теорию работы на схеме.
Математические детали
На рисунке 3 показан мой вывод формулы для процесса преобразования частоты в напряжение.
Рис. 3. Расчет преобразования частоты в напряжение.
Результаты моделирования
Единичный результат моделирования
На рисунке 4 показаны результаты моего моделирования. Чтобы отчетливо увидеть эти результаты, вам нужно нажать на изображение. Схема работает точно так, как описано выше.
Рисунок 4: Результаты моделирования.
Измерения линейности
На рисунке 5 показана линейность, которую я измерил на симуляторе.Я предсказал, что крутизна моего преобразования напряжения будет равна 1,08 на рисунке 2. Моя симуляция показывает 1,095, что означает ошибку ~ 1,4%. Не так уж плохо.
Рисунок 5: График линейности преобразования частоты в напряжение.
Заключение
Эта схема является важной частью небольшой домашней сенсорной системы, которую я собрал. Вот краткое описание моей сенсорной системы.
- Я построил металлический датчик, который состоит из катушки с проволокой (т.е. индуктора), индуктивность которой уменьшается, когда металлический объект приближается — индуктивность уменьшается из-за того, как токи индуцируются в металлическом объекте.В этом сложном электрическом процессе использовались специальные электронные инструменты, такие как устройства для зачистки проводов (устройства для снятия изоляции).
- Я построил генератор, который выдает цифровой сигнал с частотой, пропорциональной индуктивности моей проволочной катушки.
- Описанная здесь схема преобразует частоту цифрового сигнала в уровень напряжения.
- Я использую триггер Шмитта для подачи сигнала тревоги, когда напряжение на моем преобразователе частоты в напряжение превышает установленное мной значение.
Приложение A: Некоторые эмпирические данные из схемы, построенной мной
На рисунке 6 показаны 3 точки данных из версии этой схемы, которую я использую для домашнего проекта. В этом конкретном приложении было C 1 = 0,001 мкФ и R 1 = 4 кОм. Вы можете видеть, что ответ довольно линейный, измеренные и предсказанные наклоны находятся в пределах экспериментальной ошибки, и в моем приложении он работает хорошо.
