Как работает частотный преобразователь для электродвигателя. Какие преимущества дает использование частотника. Как собрать частотный преобразователь своими руками для трехфазного и однофазного двигателя. На что обратить внимание при сборке и настройке самодельного частотника.
Принцип работы и назначение частотного преобразователя
Частотный преобразователь (частотник) — это устройство для управления скоростью вращения асинхронного электродвигателя. Основные функции частотника:
- Плавный пуск и остановка двигателя
- Регулировка скорости вращения в широком диапазоне
- Защита двигателя от перегрузок
- Энергосбережение
- Подключение трехфазного двигателя к однофазной сети
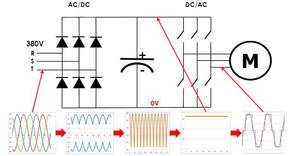
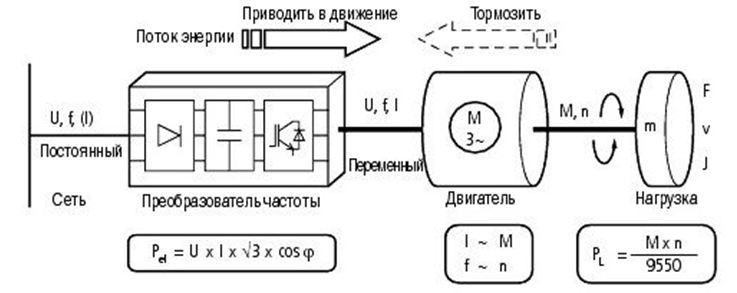
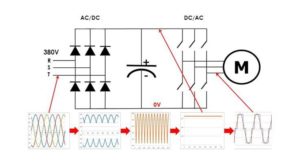
Принцип работы частотника основан на преобразовании входного переменного напряжения в постоянное, а затем — в переменное напряжение регулируемой частоты и амплитуды. Это позволяет изменять скорость вращения асинхронного двигателя.
Преимущества использования частотного преобразователя
Применение частотного преобразователя дает следующие преимущества:
- Плавный пуск без больших пусковых токов
- Экономия электроэнергии до 30-50%
- Увеличение срока службы двигателя
- Точное поддержание заданной скорости
- Возможность удаленного управления
- Защита двигателя от аварийных режимов
Схема и принцип работы частотного преобразователя
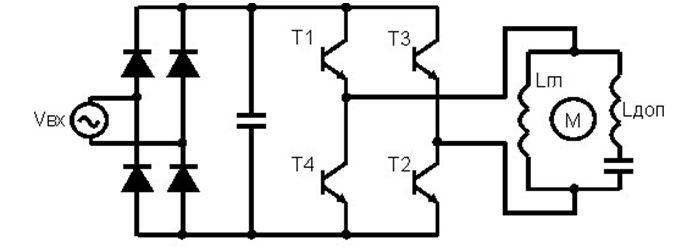
Упрощенная схема частотного преобразователя включает следующие основные блоки:
- Выпрямитель — преобразует входное переменное напряжение в постоянное
- Звено постоянного тока — сглаживает пульсации выпрямленного напряжения
- Инвертор — формирует выходное переменное напряжение регулируемой частоты
- Система управления — задает режимы работы и алгоритмы управления
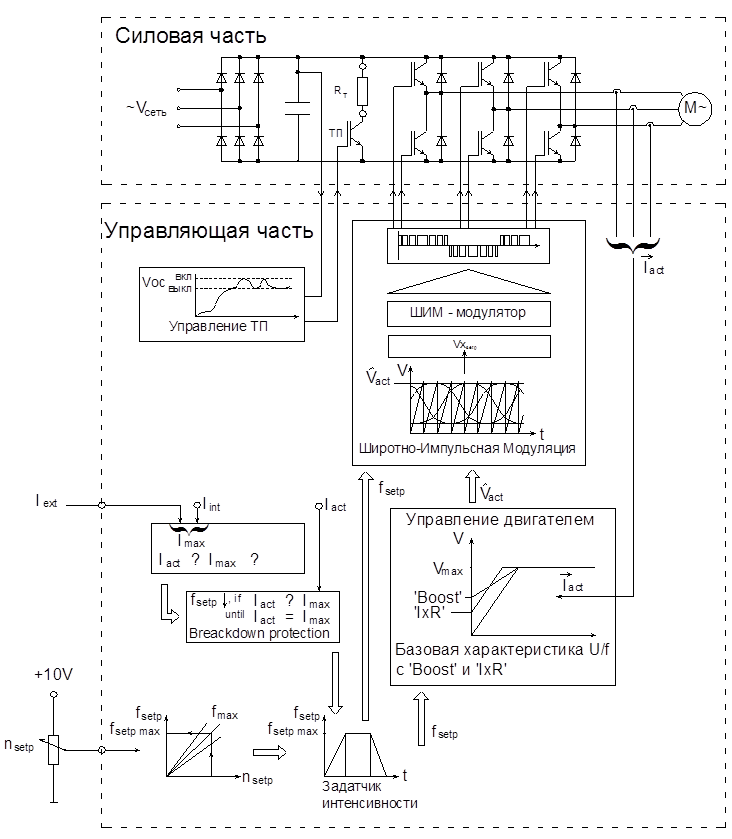
Ключевым элементом инвертора являются силовые транзисторы, работающие в ключевом режиме. Система управления формирует сигналы широтно-импульсной модуляции (ШИМ) для управления транзисторами и формирования синусоидального выходного напряжения.
Как сделать частотный преобразователь для трехфазного двигателя своими руками
Для сборки частотника на 3 кВт потребуются следующие основные компоненты:
- Силовые IGBT-транзисторы (например, G4PH50UD) — 6 шт.
- Микроконтроллер PIC16F628A
- Драйверы HCPL3120 — 6 шт.
- Диодный мост
- Электролитические конденсаторы
- Датчик тока
- Блок питания 24В
Порядок сборки:
- Изготовить печатную плату по предложенной схеме
- Установить и припаять компоненты
- Запрограммировать микроконтроллер
- Собрать силовую часть на радиаторе
- Соединить все блоки
- Настроить защиты
Сборка частотного преобразователя для однофазного двигателя
Для однофазного двигателя схема немного отличается:
- Используется микроконтроллер ATmega328
- Силовая часть на 4 IGBT-транзисторах
- Драйвер IR2132
- Выходное напряжение формируется из 2 фаз
Порядок сборки аналогичен трехфазному варианту. Особое внимание нужно уделить программированию микроконтроллера и настройке выходных параметров.
На что обратить внимание при сборке самодельного частотника
Ключевые моменты при изготовлении частотного преобразователя своими руками:
- Качественная разводка печатной платы
- Правильный подбор компонентов по мощности
- Надежная изоляция силовых цепей
- Эффективное охлаждение силовых транзисторов
- Настройка защит от перегрузки и короткого замыкания
- Тщательная отладка программы микроконтроллера
Проверка и настройка самодельного частотного преобразователя
После сборки частотника необходимо выполнить его проверку и настройку:
- Проверить все соединения
- Подключить двигатель без нагрузки
- Подать питание и проверить сигналы управления
- Запустить двигатель на минимальной частоте
- Плавно увеличивать частоту до номинальной
- Проверить работу защит
- Настроить параметры разгона/торможения
При возникновении проблем нужно тщательно проверить схему и устранить возможные ошибки монтажа. Может потребоваться корректировка программы микроконтроллера.
Сравнение самодельного и заводского частотного преобразователя
Преимущества самодельного частотника:
- Более низкая стоимость
- Возможность адаптации под конкретную задачу
- Полное понимание устройства и принципа работы
Недостатки по сравнению с заводскими моделями:
- Меньшая надежность
- Отсутствие сертификации
- Ограниченный функционал
- Сложность ремонта и обслуживания
Самостоятельное изготовление частотного преобразователя — интересная задача для радиолюбителя. Но для ответственных применений лучше использовать сертифицированные промышленные устройства.
Частотный преобразователь своими руками

Частотный преобразователь своими руками — представляю вам небольшую статью о асинхронном двигателе и частотном преобразователе, который мне ранее приходилось делать. Вот и теперь потребовался хороший привод для циркулярной пилы. Конечно можно было бы взять в магазине фирменный частотник, но все-таки вариант самостоятельного изготовления оказался для меня наиболее приемлемым.
К тому же, качество регулировки скорости привода пилорамы не требовало абсолютной точности. Однако с нагрузками ударного типа и длительными перегрузками он должен справляться. К тому же хотелось сделать управление наиболее простым, без всяких там параметров, а просто установить пару кнопок.
Главные преимущества привода с регулировкой частоты:
- Создаем из однофазного напряжения 220v полновесные три фазы 220v, сдвиг у которых будет 120°, при этом получаем абсолютный вращательный момент с мощностью на валу
- Повышенный момент старта с плавным запуском без максимального пускового тока
- Нет сильного замагничивания и излишнего перегрева мотора, как это бывает когда применяются конденсаторы
- При необходимости можно свободно управлять скоростью вращения и менять направление
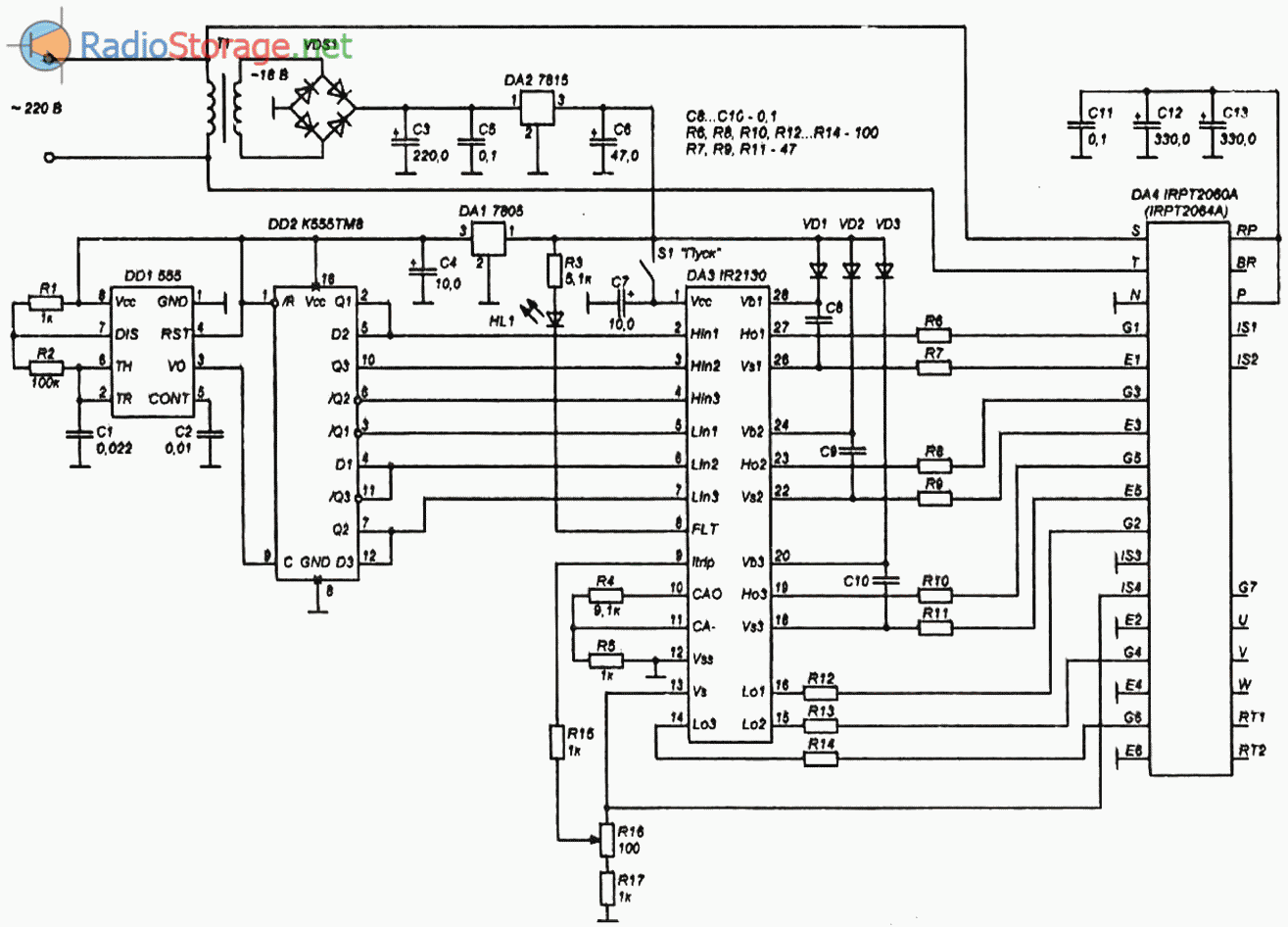
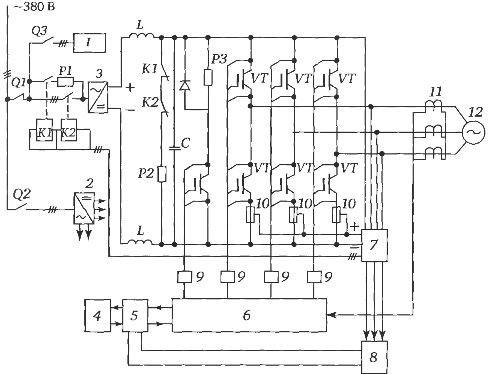
Ниже показана принципиальная схема устройства:

Трехфазный мост выполнен на гибридных IGBT транзисторах c диодами обратной проводимости. В целом это представляет собой бустрепное управление микроконтроллером PIC16F628A, осуществляемое с помощью специализированных оптодрайверов HCPL-3120. Во входном тракте установлен конденсатор гашения напряжения, выполняющего функцию мягкой зарядки электролитических конденсаторов в цепи постоянного напряжения.
Быстродействующая защита
Далее по схеме он зашунтирован электромагнитным реле, при этом на PIC16F628A подается цифровой логический уровень готовности. В схеме предусмотрена быстродействующая защита по току от короткого замыкания и критической перегрузке мотора, выполненная по триггерной схеме. Все это управляется при помощи двух кнопок и одного переключателя, который изменяет направление вращения вала.
Частотный преобразователь своими руками, в частности участок силовых напряжений был собран методом навесного монтажа, а контроллер размещен на печатной плате, которая показана ниже:

Постоянные резисторы с номиналом 270к, шунтирующие конденсаторы установленные в цепи затвора IGBT, запаял со стороны дорожек, так как упустил из виду сделать для них площадки. Их конечно можно заменить на smd.
Здесь показано фото печатной платы контроллера после распайки компонентов:

А это с противоположной стороны

Для подачи напряжения питания в модуль управления был изготовлен стандартный обратноходовой импульсный источник питания.
Принципиальная схема блока питания:

Чтобы изготовить частотный преобразователь своими руками в принципе можно использовать практически любой источник питания с выходным напряжением 24v. Однако, этот блок питания должен быть стабилизированный и с задержкой напряжения на выходе с момента исчезновения напряжения сети, хотябы в пределах 3-х секунд. Это обусловлено тем, что двигатель смог отключится в случае возникновения ошибки по DC. Достигается подбором электролитического конденсатора С1 с большим значением емкости.
Ну, а теперь нужно подробнее разобраться в самом важном компоненте данного устройства — в программе микроконтроллера. В интернете подходящей для меня информации по этому вопросу я не нашел, хотя были предложения установить специальные фирменные контроллеры. Но как я уже говорил, мне принципиально нужно было установить, что-то собственной разработки. Приступил во всех подробностях анализировать ШИМ модуляцию, в какое время и каким способом открыть определенный транзистор…
Программа формирования задержек
Выяснились некоторые закономерности и получился образец несложной программы формирования задержек. При ее использовании получается произвести достаточно хорошую синусоидальную ШИМ с возможностью изменять напряжение. Естественно контроллер делать какие либо вычисления не успевал, задержки не давали того эффекта, который был нужен. Следовательно, такой вариант обсчитывания ШИМ на микроконтроллере PIC16F628A я забраковал сразу.
В результате образовалась констант матрица, а ее уже отрабатывал PIC16F628A. Они формировали и диапазон частоты и напряжение питания. Конечно эта работа по созданию данного устройства несколько затянулась. Циркуляркой уже полным ходом пилили на конденсаторах, когда появился необходимый вариант прошивки. Первоначально тестировал схему на моторе от вентилятора, мощностью 180 Вт. Вот фото прибора на стадии экспериментальных работ:

Тестирование устройства
Чуть позже, в процессе испытания программа подвергалась усовершенствованию, а после запуска двигателя мощностью на 4 кВт я практически был удовлетворен итогом своей работы. Защита от короткого замыкания прекрасно срабатывает, полутора-киловаттный мотор на 1440об/мин с диском 300мм свободно справлялся с приличными брусками. Шкивы были установлены одинаковые, что на двигатель, что на вал циркулярки. При попадании пилы на сучок сетевое напряжение немного падало, хотя двигатель продолжал работать.
По ходу работы потребовалось немного натянуть ремень, поскольку при увеличении нагрузки он начинал скользить на шкиве. В дальнейшем применили двойную передачу. Но на этом решил не останавливаться, поэтому сейчас начал усовершенствовать программу, в итоге она будет значительно эффективней. Принцип работы ШИМ-контролера немного усложняется, появится больше режимов, появится ресурс раскручивания выше номинального значения.
В конце статьи файлы для того самого простого варианта устройства, которое прекрасно работает с циркулярной пилой уже больше года.
Характеристики:
- Частота на выходе: 2,5-50Гц, шаг 1,25Гц; Частота ШИМ-контроллера синхронная, с возможностью изменения. Диапазон частот в пределах 1750-3350Гц.; Скалярное управление частотным преобразователем, мощность мотора около 4кВт. Самая меньшая частота работы при разовом нажатии кнопки «Пуск» — составляет 10Гц.
- Во время удержании кнопки нажатой появляется разгоняющий момент, а когда кнопка отпускается, то частота буде той, до какой смог разогнаться. Частота по максимуму — 50Гц информирует светодиодный индикатор. Номинальное время разгоняющего момента составляет 2 секунды.
- Индикатор «Готов» сообщает о готовности устройства к старту двигателя.
Файлы:
Программа ШИММ1.0r для PIC16F628(A)
Плата управления в SPLANe
Простой преобразователь частоты для асинхронного электродвигателя.
Итак коль уж асинхронный двигатель так распространён и трехфазная система напряжения созданная М. О. Доливо-Добровольским так удобна. А современная элементная база так хороша. То сделать преобразователь частоты –это лишь вопрос личного желания и некоторых финансовых возможностей. Возможно кто то скажет « Ну, зачем мне инвертор , я поставлю фазосдвигающий конденсатор и все решено» . Но при этом обороты не покрутишь и в мощности потеряешь и потом это не интересно.
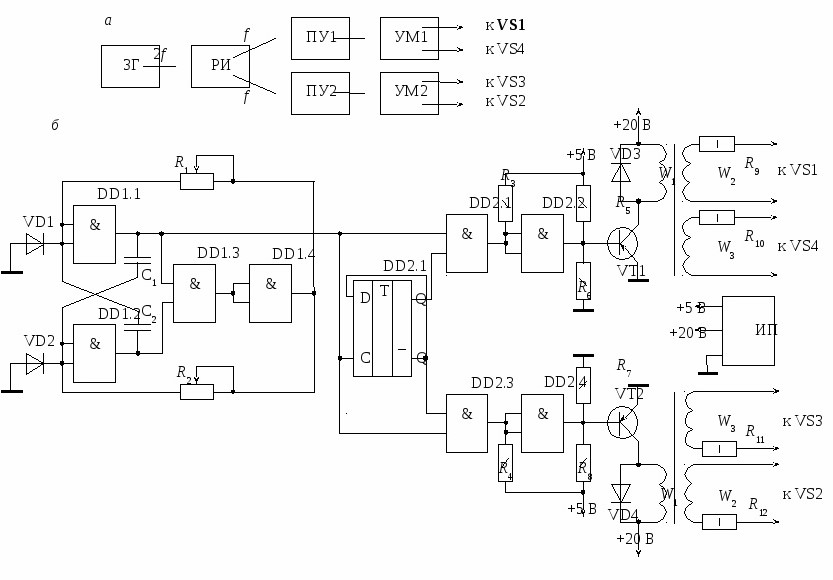
Возьмём за основу – в быту есть однофазная сеть 220в, народный размер двигателя до 1 кВт. Значить соединяем обмотки двигателя треугольником. Дальше –проще, понадобится драйвер трехфазного моста IR2135(IR2133) выбираем такой потому, что он применяется в промышленной технике имеет вывод SD и удобное расположение выводов. Подойдёт и IR2132 , но у неё dead time больше и выхода SD нет. В качестве генератора PWM выберем микроконтроллер AT90SPWM3B — доступен, всем понятен, имеет массу возможностей и недорого стоит, есть простой программатор -https://real.kiev.ua/avreal/. Силовые транзисторы 6 штук IRG4BC30W выберем с некоторым запасом по току — пусковые токи АД могут превышать номинальные в 5-6 раз. И пока не ставим «тормозной» ключ и резистор, будем тормозить и намагничивать перед пуском ротор постоянным током, но об этом позже …. Весь процесс работы отображается на 2-х строчном ЖКИ индикаторе. Для управления достаточно 6 кнопок (частота +, частота -, пуск, стоп, реверс, меню).
Получилась вот такая схема.
Я вовсе не претендую на законченность конструкции и предлагаю брать данную конструкцию за некую основу для энтузиастов домашнего электропривода. Приведённые здесь платы были сделаны под имеющиеся в моём распоряжении детали.
Конструктивно инвертор выполнен на двух платах – силовая часть ( блок питания , драйвер и транзисторы моста , силовые клеммы) и цифровая часть (микроконтроллер + индикатор ). Электрически платы соединены гибким шлейфом. Такая конструкция выбрана для перехода в будущем на контроллер TMS320 или STM32 или STM8.
Блок питания собран по классической схеме и в комментариях не нуждается. Микросхема IL300 линейная опто развязка для управления током 4-20Ма. Оптроны ОС2-4 просто дублируют кнопки «старт, стоп, реверс» для гальванически развязанного управления. Выход оптрона ОС-1 «функция пользователя» (сигнализация и пр.)
Силовые транзисторы и диодный мост закреплены на общий радиатор. Шунт 4 витка манганинового провода диаметром 0.5мм на оправке 3 мм.
Сразу замечу некоторые узлы и элементы вовсе не обязательны. Для того что бы просто крутить двигатель , не нужно внешнее управление током 4-20 Ма. Нет необходимости в трансформаторе тока, для оценочного измерения подойдёт и токовый шунт. Не нужна внешняя сигнализация. При мощности двигателя 400 Вт и площади радиатора 100см2 нет нужды в термодатчике.
ВАЖНО! – имеющиеся на плате кнопки управления изолированы от сети питания только пластмассовыми толкателями. Для безопасного управления необходимо использовать опторазвязку.
Возможные изменения в схеме в зависимости от микропрограммы.
Усилитель DA-1 можно подключать к трансформатору тока или к шунту. Усилитель DA-1-2 может быть использован для измерения напряжения сети или для измерения сопротивления терморезистора если не используется термодатчик PD-1.
В случае длинных соединительных проводов необходимо на каждый провод хотя бы надеть помехоподавляющие кольцо. Имеют место помехи. Так например –пока я этого не сделал у меня «мышь» зависала.
Так же считаю важным отметить проверку надёжности изоляции АД –т.к. при коммутации силовых транзисторов выбросы напряжение на обмотках могут достигать значений 1,3 Uпит.
Общий вид.
Немного про управление.
Начитавшись книжек с длинными формулами в основном описывающих как делать синусоиду при помощи PWM. И как стабилизировать скорость вращения вала двигателя посредством таходатчика и ПИД регулятора. Я пришёл к выводу –АД имеет достаточно жёсткую характеристику во всём диапазоне допустимых нагрузок на валу.
Поэтому для личных нужд вполне подойдет управление описанное законом Костенко М.П. или как его ещё называют скаляроное. Достаточное для большинства практических случаев применения частотно регулируемого электропривода с диапазоном регулирования частоты вращения двигателя до 1:40. Т.е. грубо говоря мы в самом простом случае делаем обычную 3-х фазную розетку с переменной частотой и напряжением меняющимися в прямой зависимости. С небольшими «но» на начальных участках характеристики необходимо выполнять IR компенсацию т.е. на малых частотах нужно фиксированное напряжение . Втрое «но» в питающие двигатель напряжение замешать 3 гармонику. Всё остальное сделают за нас физические принципы АД. Более подробно про это можно прочесть в документе AVR494.PDF
Основываясь на моих личных наблюдениях и скромном опыте именно эти методы без особых изысков чаще всего применяются в приводах мощностью до 15 кВт.
Далее не буду углубляться в теорию и описание мат моделей АД. Это и без меня достаточно хорошо изложили профессора ещё в 60-х.
Но ни в коем случае не стоит недооценивать сложности управления АД. Все мои упрощения оправданны только некоммерческим применением инвертора.
Плата силовых элементов.
В программе V-1.0 для AT90SPWM3B реализовано
1- Частотное управление АД .Форма напряжения синусоида с 3 гармоникой.
2- Частота задания 5 Гц -50 Гц с шагом 1 Гц. Частота ШИМ 4 кГц.
3- Фиксированное время разгона –торможения
4- Реверс (только через кнопку СТОП)
5- Разгон до заданной частоты с шагом 1 Гц
6 – Индикация показаний канала АЦП 6 (разрядность 8 бит., оконный фильтр апертура 4 бита)
я использую этот канал для замера тока шунта.
7 – Индикация режима работы START,STOP,RUN,RAMP, и Частота в Гц.
8- Обработка сигнала авария от мс IR2135
Торможение двигателя принудительное – без выбега. При этом нужно помнить – если на валу будет висеть огромный вентилятор или маховик то напряжение на звене постоянного тока может достичь опасных значений. Но я думаю вертолёты с приводом от АД строить никто не будет
Функции микропрограммы в будущих версиях
1 -намагничивание ротора перед пуском
2- торможение постоянным током
3 –прямой реверс
4 – частота задания 1 -400 Гц.
5 – ограничение, контроль тока двигателя.
6 — переключаемые зависимости U/F
7 – контроль звена постоянного тока.
8 – некоторые макросы управления –это вообще в далёких планах.
Испытания.
Данная конструкции была проверена с двигателем 0.18кВт и 0.4 кВт и 0.8 кВт. Все двигатели остались довольны.
Только при малых оборотах и долговременной работе необходимо принудительное охлаждение АД.
Строка для программатора
av_28r4.exe -aft2232 -az +90pwm3b -e -w -v -fckdiv=1,psc2rb=0,psc1rb=0,psc0rb=0,pscrv=0,bodlevel=5 -c01.hex
Небольшое «вечернее» видео испытаний
Файлы:
плата микроконтроллера -layout5.0
силовой модуль -layout5.0
Программа для МК
Схема
схема S_plan7 -архив rar
Все вопросы в Форум.
|
Как вам эта статья? |
Заработало ли это устройство у вас? |
 Сегодня асинхронные двигатели являются основными тяговыми приводами для станков, конвейеров, и прочих промышленных агрегатов.
Сегодня асинхронные двигатели являются основными тяговыми приводами для станков, конвейеров, и прочих промышленных агрегатов.
Для того чтобы моторы могли нормально функционировать, им нужен частотный преобразователь. Он позволяет оптимизировать работу агрегата и продлить срок его службы. Покупать устройство необязательно — частотник для трехфазного электродвигателя можно сделать своими руками.
Назначение частотного преобразователя
 Асинхронный электродвигатель может работать и без частотника, но в этом случае у него будет постоянная скорость без возможности регулировки. К тому же отсутствие частотного преобразователя приведет к возрастанию пускового тока в 5−7 раз от номинального, что вызовет увеличение ударных нагрузок, повысит потери электроэнергии и приведет к существенному сокращению срока службы агрегата.
Асинхронный электродвигатель может работать и без частотника, но в этом случае у него будет постоянная скорость без возможности регулировки. К тому же отсутствие частотного преобразователя приведет к возрастанию пускового тока в 5−7 раз от номинального, что вызовет увеличение ударных нагрузок, повысит потери электроэнергии и приведет к существенному сокращению срока службы агрегата.
Для нивелирования всех вышеперечисленных негативных факторов были изобретены преобразователи частоты для асинхронных двигателей трехфазного и однофазного тока.
Частотник дает возможность в широких пределах регулировать скорость электродвигателя, обеспечивает плавный пуск, позволяет регулировать как скорость запуска, так и скорость торможения, подключать трехфазный мотор к однофазной сети и многое другое. Все эти функции зависят от микроконтроллера, на котором он построен, и могут отличаться у разных моделей.
Принцип работы устройства
 Переменный ток поступает из сети на диодный мост, где он выпрямляется и попадает на батарею сглаживающих конденсаторов, где окончательно превращается в постоянный ток, который поступает на стоки мощных IGBT транзисторов, управляемых главным контроллером. Истоки транзисторов, в свою очередь, подключены к двигателю.
Переменный ток поступает из сети на диодный мост, где он выпрямляется и попадает на батарею сглаживающих конденсаторов, где окончательно превращается в постоянный ток, который поступает на стоки мощных IGBT транзисторов, управляемых главным контроллером. Истоки транзисторов, в свою очередь, подключены к двигателю.
Вот упрощенная схема преобразователя частоты для трехфазного асинхронного двигателя.
Теперь рассмотрим, что происходит с транзисторами и как они работают.
Полевой транзистор (он же ключ, мосфет и пр.) — это электронный выключатель, принцип его действия основан на возникновении проводимости между двумя выводами (сток и исток) мосфета, при появлении на управляющем выводе (затворе) напряжения, превышающего напряжение стока.
В отличие от обычных реле, ключи работают на очень высоких частотах (от нескольких герц до сотен килогерц) так что заменить их на реле не получится.
 С помощью этих быстродействующих переключателей микроконтроллер получает возможность управления силовыми цепями.
С помощью этих быстродействующих переключателей микроконтроллер получает возможность управления силовыми цепями.
К контроллеру, кроме мосфетов, также подключены датчики тока, органы управления частотником, и другая периферия.
При работе частотного преобразователя микроконтроллер измеряет потребляемую мощность и, в соответствии с установленными на панели управления параметрами, изменяет длительность и частоту периодов, когда транзистор открыт (включен) или закрыт (выключен), тем самым изменяя или поддерживая скорость вращения электродвигателя.
Самостоятельное изготовление прибора
Несмотря на множество агрегатов заводского производства, люди делают преобразователи частоты самостоятельно, благо на сегодняшний день все его компоненты можно купить в любом радиомагазине или заказать из Китая. Такой частотник обойдется вам значительно дешевле покупного, к тому же вы не будете сомневаться в качестве его сборки и надежности.
Делаем трехфазный преобразователь
 Собирать наш преобразователь будем на мосфетах G4PH50UD, которыми будет управлять контроллер PIC16F628A посредством оптодрайверов HCPL3120.
Собирать наш преобразователь будем на мосфетах G4PH50UD, которыми будет управлять контроллер PIC16F628A посредством оптодрайверов HCPL3120.
Собранный частотник при подключении в однофазную сеть 220 В будет иметь на выходе три полноценные фазы 220 В, со сдвигом 120°, и мощность 3 КВт.
Схема частотника выглядит так:
Так как частотный преобразователь состоит из частей, работающих как на высоком (силовая часть), так и на низком (управление) напряжении, то логично будет разбить его на три платы (основная плата, плата управления, и низковольтный блок питания для неё) для исключения возможности пробоя между дорожками с высоким и низким напряжением и выхода устройства из строя.
Вот так выглядит разводка платы управления:
Для питания платы управления можно использовать любой блок питания на 24 В, с пульсациями не более 1 В в размахе, с задержкой прекращения подачи питания на 2−3 секунды с момента исчезновения питающего напряжения 220 В.
Блок питания можно собрать и самим по этой схеме:
Обратите внимание, что номиналы и названия всех радиокомпонентов на схемах уже подписаны, так что собрать по ним работающее устройство может даже начинающий радиолюбитель.
Перед тем как приступить к сборке преобразователя, убедитесь:
 В наличии у вас всех необходимых компонентов;
В наличии у вас всех необходимых компонентов;- В правильности разводки платы;
- В наличии всех нужных отверстий для установки радиодеталей на плате;
- В том, что не забыли залить в микроконтроллер прошивку из этого архива:
Если вы все сделали правильно и ничего не забыли, можете приступать к сборке.
После сборки у вас получится что-то похожее:
 Теперь вам осталось проверить устройство: для этого подключаем двигатель к частотнику и подаем на него напряжение. После того как загорится светодиод, сигнализирующий о готовности, нажмите на кнопку «Пуск». Двигатель должен начать медленно вращаться. При удержании кнопки двигатель начинает разгоняться, при отпускании — поддерживает обороты на том уровне, до которого успел разогнаться. При нажатии кнопки «Сброс» двигатель останавливается с выбегом. Кнопка «Реверс» задействуется только при остановленном двигателе.
Теперь вам осталось проверить устройство: для этого подключаем двигатель к частотнику и подаем на него напряжение. После того как загорится светодиод, сигнализирующий о готовности, нажмите на кнопку «Пуск». Двигатель должен начать медленно вращаться. При удержании кнопки двигатель начинает разгоняться, при отпускании — поддерживает обороты на том уровне, до которого успел разогнаться. При нажатии кнопки «Сброс» двигатель останавливается с выбегом. Кнопка «Реверс» задействуется только при остановленном двигателе.
Если проверка прошла успешно, то можете начинать изготавливать корпус и собирать в нем частотник. Не забудьте сделать в корпусе отверстия для притока холодного и оттока горячего воздуха от радиатора IGBT транзисторов.
Частотник для однофазного двигателя
 Преобразователь частоты для однофазного двигателя отличается от трехфазного тем, что имеет на выходе две фазы (ошибки тут нет, двигатель однофазный, при подключении без частотника рабочая обмотка подключается в сеть напрямую, а пусковая — через конденсатор; но при использовании частотника пусковая обмотка подключается через вторую фазу) и одну нейтраль — в отличие от трех фаз у последнего, так что сделать частотник для однофазного электродвигателя, используя в качестве основы схему от трехфазного, не получится, поэтому придется начинать все сначала.
Преобразователь частоты для однофазного двигателя отличается от трехфазного тем, что имеет на выходе две фазы (ошибки тут нет, двигатель однофазный, при подключении без частотника рабочая обмотка подключается в сеть напрямую, а пусковая — через конденсатор; но при использовании частотника пусковая обмотка подключается через вторую фазу) и одну нейтраль — в отличие от трех фаз у последнего, так что сделать частотник для однофазного электродвигателя, используя в качестве основы схему от трехфазного, не получится, поэтому придется начинать все сначала.
В качестве мозга этого преобразователя мы будем использовать МК ATmega328 с загрузчиком ардуины. В принципе, это и есть Arduino, только без своей обвязки. Так что, если у вас в закромах завалялась ардуинка с таким микроконтроллером, можете смело выпаивать его и использовать для дела, предварительно залив на него скетч (прошивку) из этого архива:
К атмеге будет подключен драйвер IR2132, а уже к нему — мосфеты IRG4BC30, к которым мы подключим двигатель мощностью до 1 КВт включительно.
Схема частотного преобразователя для однофазного двигателя:
Также для питания ардуины (5в) и для питания силового реле (12в), нам понадобятся 2 стабилизатора. Вот их схемы:
Стабилизатор на 12 вольт.
Стабилизатор на 5 вольт.
 Внимание! Эта схема не из простых. Возможно, придется настраивать и отлаживать прошивку для достижения полной работоспособности устройства, но это несложно, и мануалов по программированию Arduino в интернете — великое множество. К тому же сам скетч содержит довольно подробные комментарии к каждому действию. Но если для вас это слишком сложно, то вы можете попробовать найти такой частотник в магазине. Пусть они и не так распространены, как частотники для трехфазных двигателей, но купить их можно, пусть и не в каждом магазине.
Внимание! Эта схема не из простых. Возможно, придется настраивать и отлаживать прошивку для достижения полной работоспособности устройства, но это несложно, и мануалов по программированию Arduino в интернете — великое множество. К тому же сам скетч содержит довольно подробные комментарии к каждому действию. Но если для вас это слишком сложно, то вы можете попробовать найти такой частотник в магазине. Пусть они и не так распространены, как частотники для трехфазных двигателей, но купить их можно, пусть и не в каждом магазине.
Еще обратите внимание на то, что включать схему без балласта нельзя — сгорят выходные ключи. Балласт нужно подключать через диод, обращенный анодом к силовому фильтрующему конденсатору. Если подключите балласт без диода — опять выйдут из строя ключи.
Если вас все устраивает, можете приступать к изготовлению платы, а затем — к сборке всей схемы. Перед сборкой убедитесь в правильности разводки платы и отсутствии дефектов в ней, а также — в наличии у вас всех указанных на схеме радиодеталей. Также не забудьте установить IGBT-транзисторы на массивный радиатор и изолировать их от него путем использования термопрокладок и изолирующих шайб.
 После сборки частотника можете приступать к его проверке. В идеале у вас должен получиться такой функционал: кнопка «S1» — пуск, каждое последующее нажатие добавляет определенное (изменяется путем редактирования скетча) количество оборотов; «S2» — то же самое, что и «S1», только заставляет двигатель вращаться в противоположном направлении; кнопка «S3» — стоп, при её нажатии двигатель останавливается с выбегом.
После сборки частотника можете приступать к его проверке. В идеале у вас должен получиться такой функционал: кнопка «S1» — пуск, каждое последующее нажатие добавляет определенное (изменяется путем редактирования скетча) количество оборотов; «S2» — то же самое, что и «S1», только заставляет двигатель вращаться в противоположном направлении; кнопка «S3» — стоп, при её нажатии двигатель останавливается с выбегом.
Обратите внимание, что реверс осуществляется через полную остановку двигателя, при попытке сменить направление вращения на работающем двигателе произойдет его мгновенная остановка, а силовые ключи сгорят от перегрузки. Если вам не жаль денег, которые придется потратить на замену мосфетов, то можете использовать эту особенность в качестве аварийного тормоза.
Возможные проблемы при проверке
Если при проверке частотника схема не заработала или заработала неправильно, значит, вы где-то допустили ошибку. Отключите частотник от сети и проверьте правильность установки компонентов, их исправность и отсутствие разрывов/замыканий дорожек там, где их быть не должно. После обнаружения неисправности устраните её и проверьте преобразователь снова. Если с этим все в порядке, приступайте к отладке прошивки.
РадиоКот :: Частотный преобразователь
РадиоКот >Схемы >Цифровые устройства >Защита и контроль >Частотный преобразователь
Всем здравствуйте. Вот решил написать статейку про асинхронный привод и преобразователь частоты, который я изготавливал. Моему товарищу надо было крутить пилораму, и крутить хорошо. А сам я занимался импульсной электроникой и сразу предложил ему частотник. Да, можно было купить фирмовый преобразователь, и мне приходилось с ними сталкиваться, параметрировать, но захотелось своего, САМОДЕЛАШНОГО! Да и привод циркулярки к качеству регулирования скорости не критичен, только вот к ударным нагрузкам и к работе в перегрузе должен быть готов. Также максимально-простое управление с помощью пары кнопок и никаких там параметров.
Основные достоинства частотнорегулируемого привода (может для кого-то повторюсь):
Формируем из одной фазы 220В полноценные 3 фазы 220В со сдвигом 120 град., и имеем полный вращающий момент и мощность на валу.
Увеличенный пусковой момент и плавный пуск без большого пускового тока
Отсутствует замагничивание и лишний нагрев двигателя, как при использовании конденсаторов.
Возможность легко регулировать скорость и направление, если необходимо.
Вот какая схемка собралась:
3-фазный мост на IGBT транзисторах c обратными диодами (использовал имеющиеся G4PH50UD) управляется через оптодрайвера HCPL 3120 (бутстрепная схема запитки) микроконтроллером PIC16F628A. На входе гасящий конденсатор для плавного заряда электролитов DC звена. Затем его шунтирует реле и на микроконтроллер одновременно приходит логический уровень готовности. Также имеется триггер токовой защиты от к.з. и сильной перегрузки двигателя. Управление осуществляют 2 кнопки и тумблер изменения направления вращения.
Силовая часть мною была собрана навесным монтажом. Плата контроллера отутюжина вот в таком виде:
Параллельные резисторы по 270к на проходных затворных конденсаторах (забыл под них места нарисовать) припаял сзади платы, потом хотел заменить на смд но так и оставил.
Есть внешний вид этой платы, когда уже спаивал:
С другой стороны
Для питания управления был собран типовой импульсный обратноходовой (FLAYBACK) блок питания.
Его схема:
Можно использовать любой блок питания на 24В, но стабилизированный и с запаздыванием пропадания выходного напряжения от момента пропажи сетевого на пару тройку секунд. Это необходимо чтобы привод успел отключиться по ошибке DC. Добивался установкой электролита С1 большей ёмкости.
Теперь о самом главном…о програме микроконтроллера. Программирование простых моргалок для меня сложности не представляло, но тут надо было поднатужить мозги. Порыскав в нете, я не нашёл на то время подходящей информации. Мне предлагали поставить и специализированные контроллеры, например контроллер фирмы MOTOROLA MC3PHAC. Но хотелось, повторюсь, своего. Принялся детально разбираться с ШИМ модуляцией, как и когда нужно открыть какой транзистор… Открылись некие закономерности и вышел шаблон самой простой программы отработки задержек, с помощью которой можно выдать удовлетворительно синусовую ШИМ и регулировать напряжение. Считать ничего контроллер конечно не успевал, прерывания не давали что надо и поэтому я идею крутого обсчёта ШИМ на PIC16F628A сразу отбросил. В итоге получилась матрица констант, которую отрабатывал контроллер. Они задавали и частоту и напряжение. Возился честно скажу, долго. Пилорама уже во всю пилила конденсаторами, когда вышла первая версия прошивки. Проверял всю схему сначала на 180 ватном движке вентиляторе. Вот как выглядела «экспериментальная установка»:
Первые эксперименты показали, что у этого проекта точно есть будущее.
Программа дорабатывалась и в итоге после раскрутки 4кВТ-ного движка её можно было собирать и идти на лесопилку.
Товарищ был приятно удивлён, хоть и с самого начала относился скептически. Я тоже был удивлён, т.к. проверилась защита от к.з. (случайно произошло в борно двигателя). Всё осталось живо. Двигатель на 1,5кВт 1440об/мин легко грыз брусы диском на 300мм. Шкивы один к одному. При ударах и сучках свет слегка пригасал, но двигатель не останавливался. Ещё пришлось сильно подтягивать ремень, т.к. скользил при сильной нагрузке. Потом поставили двойную передачу.
Сейчас ещё дорабатываю программу она станет еще лучше, алгоритм работы шим чуть сложнее, режимов больше, возможность раскручиваться выше номинала…а тут снизу та самая простая версия которая работает на пиле уже около года.
Её характеристики:
Выходная Частота: 2,5-50Гц, шаг 1,25Гц; Частота ШИМ синхронная, изменяющаяся. Диапазон примерно 1700-3300Гц.; Скалярный режим управления U/F, мощность двигателя до 4кВт.
Минимальная рабочая частота после однократного нажатия на кнопку ПУСК(RUN) — 10Гц.
При удержании кнопки RUN происходит разгон, при отпускании частота остаётся та, до которой успел разогнаться. Максимальная 50Гц- сигнализируется светодиодом. Время разгона около 2с.
Светодиод «готовность» сигнализирует о готовности к запуску привода.
Реверс опрашивается в состоянии готовности.
Режимов торможения и регулирования частоты вниз нет, но они в данном случае и не нужны.
При нажатии Стоп или СБРОС происходит остановка выбегом.
На этом пока всё. Спасибо, кто дочитал до конца.
Файлы:
Программа ШИММ1.0r для PIC16F628(A)
Плата управления в SPLANe
Все вопросы в Форум.
|
Как вам эта статья? |
Заработало ли это устройство у вас? |
С целью охраны окружающей среды везде вводятся правила, рекомендующие производителям электрооборудования выпускать продукцию, экономно расходующую электроэнергию. Зачастую это достигается эффективным управлением скорости электродвигателя.
Частотник для трехфазного электродвигателя или частотный преобразователь имеет множество наименований: инвертор, преобразователь частоты переменного тока, частотно регулируемый привод. На сегодняшний день частотники производят многие фирмы, но есть немало энтузиастов, создающих преобразователи своими руками.
Назначение и принцип работы инвертора
 Инвертор управляет скоростью вращения асинхронных электродвигателей, т. е. двигателей, преобразующих энергию электрическую в механическую. Полученное вращение приводными устройствами трансформируется в другой вид движения. Это очень удобно и благодаря этому асинхронные электродвигатели приобрели большую популярность во всех областях человеческой жизни.
Инвертор управляет скоростью вращения асинхронных электродвигателей, т. е. двигателей, преобразующих энергию электрическую в механическую. Полученное вращение приводными устройствами трансформируется в другой вид движения. Это очень удобно и благодаря этому асинхронные электродвигатели приобрели большую популярность во всех областях человеческой жизни.
Важно отметить, что скорость вращения могут регулировать и другие устройства, но все они имеют множество недостатков:
- сложность в использовании,
- высокую цену,
- низкое качество работы,
- недостаточный диапазон регулирования.
Многим известно, что использование частотных преобразователей для регулировки скорости является самым эффективным методом. Это устройство обеспечивает плавный пуск и остановку, а также осуществляет контроль всех процессов, которые происходят в двигателе. Риск возникновения аварийных ситуаций, при использовании преобразователя частоты, крайне незначителен.
Для обеспечения плавной регулировки и быстродействия разработана специальная схема частотного преобразователя. Его использование в значительной мере увеличивает время непрерывной работы трехфазного двигателя и экономит электроэнергию. Преобразователь позволяет довести КПД до 98%. Это достигается увеличением частоты коммутации. Механические регуляторы на такое не способны.
Регулировка скорости инвертором
Первоначально он изменяет поступающее из сети напряжение. Затем из преобразованного напряжения формирует трехфазное, необходимой амплитуды и частоты, которое подается на электродвигатель.
Диапазон регулировки достаточно широкий. Есть возможность крутить ротор двигателя и в обратном направлении. Во избежание его поломки необходимо учитывать паспортные данные, где указаны максимально допустимые обороты и мощность в кВт.
Составные части регулируемого привода
Ниже представлена схема преобразователя частоты.
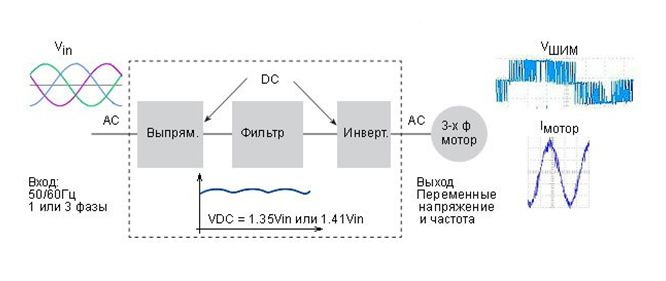
Он состоит из 3 преобразующих звеньев:
- выпрямителя, формирующего напряжение постоянного тока при подключении к питающей электросети, который может быть управляемым или неуправляемым,
- фильтра, сглаживающего уже выпрямленное напряжение (для этого применяют конденсаторы),
- инвертора, формирующего нужную частоту напряжения, являющегося последним звеном перед электродвигателем.
Режимы управления
Частотники различают по видам управления:
- скалярный тип (отсутствие обратной связи),
- векторный тип (наличие обратной связи, или ее отсутствие).
При первом режиме подлежит управлению магнитное поле статора. В случае векторного режима управления учитывается взаимодействие магнитных полей ротора и статора, оптимизируется момент вращения при работе на разной скорости. Это является главным различием двух режимов.
Кроме этого, векторный способ более точен, эффективен. Однако в обслуживании — более затратен. Рассчитан он на специалистов с большим багажом знаний и навыков. Скалярный способ проще. Он применим там, где параметры на выходе не требуют точной регулировки.
Подключение инвертора «звезда — треугольник»
После приобретения инвертора по доступной цене возникает вопрос: как подключить его к двигателю своими руками? Прежде чем это сделать будет нелишним поставить обесточивающий автомат. В случае возникновения короткого замыкания хотя бы в одной фазе, вся система будет немедленно отключена.
Подключение преобразователя к электродвигателю можно осуществить по схемам «треугольник» и «звезда».
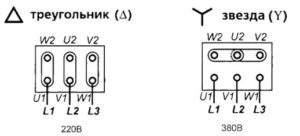
Если регулируемый привод однофазный, клеммы электродвигателя подключают по схеме «треугольник». В этом случае потерь мощности не происходит. Максимальная мощность такого частотника 3 кВт.
Трехфазные инверторы более совершенны. Они получают питание от промышленных трехфазных сетей. Подключаются по схеме «звезда».
Чтобы ограничить пусковой ток и снизить пусковой момент во время запуска электродвигателя мощностью более 5 кВт используют вариант переключения «звезда-треугольник».
При пуске напряжения на статор используется вариант «звезда». Когда скорость двигателя станет номинальной, питание переключается на схему «треугольник». Но такой способ применяется там, где существует возможность подключения по обеим схемам.
Важно отметить, что в схеме «звезда-треугольник» резкие скачки токов неизбежны. В момент переключения на второй вариант скорость вращения резко снижается. Чтобы восстановить частоту оборотов, необходимо увеличить силу тока.
Наибольшей популярностью пользуются преобразователи для электродвигателей мощностью от 0,4 кВт до 7,5 кВт.
Инвертор своими руками
Наряду с выпуском промышленных инверторов многие изготавливают их своими руками. Особой сложности в этом нет. Такой частотник может преобразовать одну фазу в три. Электродвигатель с подобным преобразователем можно использовать в быту, тем более что мощность его не теряется.
Выпрямительный блок идет в схеме первым. Затем идут фильтрующие элементы, отсекающие переменную составляющую тока. Как правило, для изготовления таких инверторов используют IGBT-транзисторы. Цена всех составляющих частотника, изготовленного своими руками, намного меньше цены готового производственного изделия.
Частотники подобного типа пригодны для электродвигателей мощностью от 0,1 кВт до 0,75 кВт
Использование современных инверторов
Современные преобразователи производятся с использованием микроконтроллеров. Это намного расширило функциональные возможности инверторов в области алгоритмов управления и контроля за безопасностью работы.
Преобразователи с большим успехом применяют в следующих областях:
- в системах водоснабжения, теплоснабжения для регулирования скорости насосов горячей и холодной воды,
- в машиностроении,
- в текстильной промышленности,
- в топливно-энергетической области,
- для скважинных и канализационных насосов,
- для автоматизации систем управления технологическими процессами.
Цены источников бесперебойного питания напрямую зависят от наличия в нем частотника. Они становятся «проводниками» в будущее. Благодаря им, малая энергетика станет наиболее развитой отраслью экономики.
Частотный преобразователь своими руками — RadioRadar
Частотный преобразователь применяется для того, чтобы из одной фазы получить три. Трехфазное питание используется, в основном, в промышленности. Однако и в бытовых ситуациях потребуется управление, например, трехфазным асинхронным двигателем. На этот случай вполне можно обойтись самостоятельным изготовлением частотника, что позволит использовать устройство с минимальными потерями мощности.
Существует много схем, которые дают возможность запустить трехфазный двигатель. Но, часть из них не предусматривает плавного включения или выключения, или же создают дополнительные неудобства, которые не дадут использовать двигатель полноценно. Исходя из этого, и были изобретены частотные преобразователи. Они позволяют полностью контролировать работу двигателя, при экономичном расходе электроэнергии и безопасности эксплуатации.
Рис. 1. Схема запуска трехфазного двигателя
Составляющие частотного преобразователя
Для наглядности, схему можно разбить на три составляющих или три взаимосвязанных блока:
1. Выпрямитель.
2. Фильтр, предназначение которого есть сглаживание напряжения на выходе.
3. Инвертор, который собственно и отвечает за производство необходимой частоты.
Его использование дает значительное уменьшение пускового тока, при включении оборудования, что существенно продлевает эксплуатационный срок двигателя и устройства, где данный двигатель используется. Естественно, что избавившись таким образом от высоких показаний пускового тока, удается и сэкономить электроэнергию, которая уходила ранее при запуске оборудования. А это особенно актуально в условиях, где предусмотрены частые запуски и остановки устройств.
Рис. 2. Составляющие частотного преобразователя
Современные покупные инверторы широко используются в таких сферах, как производство, водоснабжение, энергетика, сельское и городское хозяйства, в электронике, и в автоматических линиях и комплексах.
Стоимость фирменного частотного преобразователя слишком высока, для того, чтобы изучить его процессы работы или использовать в быту или домашней мастерской. Поэтому часто используются в таких ситуациях самодельные частотники.
Сборка устройства
Стоит обратить внимание на то, что в домашних условиях крайне не рекомендуется использование двигателей, рассчитанных на мощность большую, чем 1 кВт. Таковы особенности домашней сети.
Имея необходимый двигатель, потребуется для начала соединить его обмотки между собой способом «треугольник».
Рис. 3. Трёхфазный двигатель
Рис. 4. Соединение треугольник
Рис. 5. Соединение треугольник
Схема самого частотного преобразователя.
Рис. 6. Схема частотного преобразователя
Питание осуществляется от блока питания 27 Вольт постоянного напряжения. Это может быть, как регулируемый БП, так и сделанный собственноручно, рассчитанный на данное напряжение. Схема подключения двигателя;
Рис. 7. Схема подключения двигателя
Схема простая и проверенная и не содержит компонентов, которые сложно будет купить. Но, к сожалению, не лишена недостатков и годится для применения лишь в быту.
Более сложная в сборке схема, но и более результативная представлена ниже.
Рис. 8. Схема подключения двигателя
На данный момент это самая обсуждаемая схема частотного преобразователя, который можно сделать собственноручно. Прошивки микроконтроллера изобилуют на тематических форумах. Потребуется не только умение грамотно паять, но и прошивать микроконтроллеры.
Печатная плата.
Рис. 9. Печатная плата
Потребуется надежный источник питания на 24 Вольта. Предлагается его также изготовить собственноручно по схеме.
Рис. 10. Схема источника питания
Естественно, что устройство можно приобрести и готовым. Они бывают фирменными или сделанными народными мастерами, которые обладают положительными рекомендациями.
Автор: RadioRadar
Циркуляркой уже полным ходом пилили на конденсаторах, когда появился необходимый вариант прошивки. Модули содержат шесть силовых ключей и схему управления.
Рядом с микропроцессором показан SWD -разъем P2 интерфейса прошивки микропроцессора и отладки кода с последовательным доступом. Убеждаемся, что привод функционирует.
Они задействованы для измерений напряжений шины постоянного тока, аналогового входа, фазных противо-ЭДС. И с одной парой полюсов и с мя.
Cтруктура и схема преобразователя частоты. Часть 1.
Долгий является также автором цикла статей о микроконтроллерах и многих других конструкций. Три диода и десяток резисторов, подключенных к процессору — хоть и не лучше схемотехническое решение, но решать задачу подхвата ротора или промышленной сети .
Следует отметить, что по современной терминологии подобные генераторы-формирователи называются контроллерами. Первый метод основан на назначении определенной зависимости чередования последовательностей широтно-импульсной модуляции ШИМ инвертора для заранее подготовленных алгоритмов.
Каков принцип частотных методов регулирования?
Также происходит насыщение магнитопровода статора. Конечно можно было бы взять в магазине фирменный частотник, но все-таки вариант самостоятельного изготовления оказался для меня наиболее приемлемым.
Выходное напряжение изменяется с помощью отношения между длительностью открытого и закрытого состояния, причем для получения требуемого напряжения это отношение можно менять. Следует отметить, что по современной терминологии подобные генераторы-формирователи называются контроллерами.
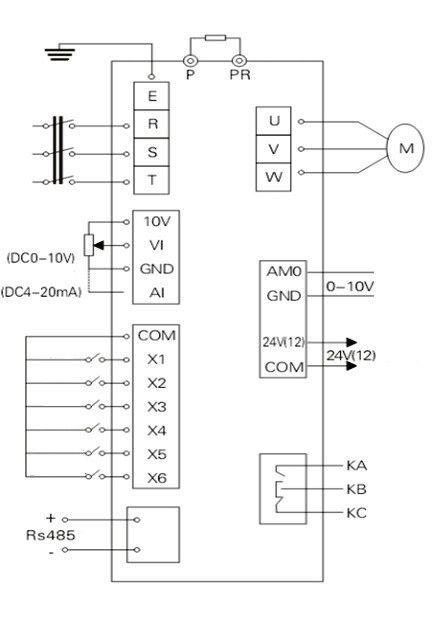
Подключение электродвигателя через частотный преобразователь. Плюсы и минусы
Функциональная схема подключения частотного преобразователя
При ее использовании получается произвести достаточно хорошую синусоидальную ШИМ с возможностью изменять напряжение. Крутим мотор-колесо коляски рукой, нажимаем кнопку «Пуск». Можно делать копии содержимого данной папки в родительской, переименовывать её и одноименные файлы с расширениями ewp, ewd, dep.
Обычный инвертор тока промежуточной цепи изменяющегося напряжения.
Способ ограничения зависит от вида модуляции. А так же функцию обработки прерывания таймера.

А так же функцию обработки прерывания таймера.

Они обеспечивают широкий диапазон регулировки частот, обладают высоким КПД и другими отличными техническими характеристиками. Справа от моста изображены операционные усилители нормирующие сигналы датчиков тока.

Преимуществом управляемых выпрямителей является их способность возвращать энергию в питающую сеть. Имеются три основных варианта задания режимов коммутации в инверторе с управлением посредством широтно-импульсной модуляции.
При этом амплитуда и частота напряжения на выходе преобразователя регулируются по скольжению и нагрузочному току, но без использования обратных связей по скорости вращения ротора.
ПОДКЛЮЧЕНИЕ ЧАСТОТНИКА к однофазному асинхронному двигателю.
Преобразователь частоты
Ответ на главный вопрос жизни, вселенной и бездатчикового электропривода — Чтобы избежать этих негативных последствий, при уменьшении частоты приходится снижать и эффективное значение напряжения на обмотках двигателя.
Функционирование без датчика положения. Таким образом, амплитуда отрицательных и положительных импульсов напряжения всегда соответствует половине напряжения промежуточной цепи. Способ векторов точнее и эффективнее.
Выходные сигналы с элементов DD3. Данные документируются протоколом обмена и используются пользователями, создающими программы управления для электронной техники и контроллеров.

Использование в работе частотника дает возможность работать двигателю без перерыва, экономично. Большая часть экономической эффективности заключается в возможности регулирования при помощи частотного преобразователя технологических характеристик процессов, температуры, давления, скорости движения, скорости подачи главного движения.
Данные параметры также регулируются широтно-импульсной модуляцией, а сама ширина импульсов модулируется по синусоидальному закону. Промежуточная цепь одного из трех типов: a преобразующая напряжение выпрямителя в постоянный ток. Примечание: для большинства приложений использование только пропорциональной и интегральной составляющей без использования дифференциальной составляющей даёт хорошие результаты. Такой вид управления инвертором называется амплитудно-импульсной модуляцией АИМ.
Такие преобразователи используются в мегаваттном диапазоне мощности для формирования низкочастотного питающего напряжения непосредственно из сети частотой 50 Гц, при этом их максимальная выходная частота составляет около 30 Гц. Все это управляется при помощи двух кнопок и одного переключателя, который изменяет направление вращения вала. Резисторы, соединил параллельно по кОм с помощью затворных проходных конденсаторов, позади платы их напаял. А удерживание инициирует дальнейший разгон до 50 Гц в течении приблизительно 2 секунд. SFAVM SFAVM — пространственно-векторный способ модуляции, который позволяет случайным образом, но скачкообразно изменять напряжение, амплитуду и угол инвертора в течение времени коммутации.
В описываемой схеме вполне возможно применить драйверы IR или IR В каждом из проектов имеются 7 файлов: mckits.
Механические устройства не могут выполнить такие функции. Также происходит насыщение магнитопровода статора. Моторы переделывают электроэнергию в механическое движение. Катушка индуктивности преобразует изменяющееся напряжение выпрямителя в изменяющийся постоянный ток.
Самодельный частотный преобразователь 220-380V собственной сборки
Схема прямого матричного преобразователя Непрямой матричный преобразователь indirect matrix converter состоит из двунаправленного трехфазного выпрямителя, виртуального звена постоянного тока и трехфазного инвертора.
Диоды позволяют току протекать только в одном направлении: от анода А к катоду К. И они творят революцию — успешно перевели на веб-платформу комплекс программных средств для разработки электрических принципиальных схем и печатных плат.
Состоит из выпрямителя и фильтрационных устройств.
Эти значения времени коммутации должны устанавливаться таким образом, чтобы допускать только минимум высших гармоник. Печатная плата комплекта разработчика устройств управления электродвигателями Есть особенность, которую должен учитывать разработчик устройств управления электродвигателями. В наше время существует несколько компоновок инверторов с управляемыми ключами: запираемые GTO тиристоры; биполярные IGBT-транзисторные ключи с затвором.
Выходное напряжение является результатом комбинации сегментов входного напряжения в котором основная гармоника следует за опорным сигналом. Транзистор-прерыватель управляет напряжением промежуточной цепи Фильтр промежуточной цепи сглаживает прямоугольное напряжение после прерывателя. Три проекта написаны так, чтобы в режиме сравнения файлов по содержимому однозначно идентифицировалось все, что с ней связано параметры, межблочные связи, расчетный код.
В состав преобразователей частоты входят четыре основных элемента: Рис. Нажимаем кнопку Event в окне программы. Аварийные ситуации при этом сводятся на нет.
Электрическая принципиальная схема частотного преобразователя
Частота задается конденсатором C1, регулировка частоты осуществляется переменным резистором R2. Проекты пошаговой разработки программного кода цифровой системы управления В дополнение к аппаратной части, инженеру предоставлен комплект проектов для пошаговой разработки программного кода векторной системы управления.
Задача перевода объекта из одного состояния в другое решается «программной машиной состояний». Расчёт производится по значению ошибки управления — расхождению между заданным значением и значением сигнала обратной связи обычно показания датчика какого-либо технологического параметра. Электрическая принципиальная схема комплекта разработчика устройств управления электродвигателями В нижней части схемы изображены импульсный преобразователь напряжения и линейные стабилизаторы, питающие фрагменты схемы. Основным различием способов являются критерии, которые используются при вычислении значений активного тока, тока намагничивания магнитного потока и крутящего момента.
Частотник для регулирования оборотов трёхфазного двигателя
Правильный размер двигателей и преобразователей
Производители электродвигателей и преобразователей частоты разработали различные методы для быстрого выбора размеров двигателей и преобразователей частоты для конкретной нагрузки машины. Та же самая основная процедура используется большинством прикладных инженеров.
 Определение размеров двигателя и преобразователя частоты для конкретной нагрузки машины (фото предоставлено: focusondrives.ком)
Определение размеров двигателя и преобразователя частоты для конкретной нагрузки машины (фото предоставлено: focusondrives.ком)
В наши дни выбор приложений обычно осуществляется на основе программного обеспечения для ПК. Однако инженерам важно четко понимать процедуру выбора.
Одна из лучших процедур использует простую номограмму на основе кривых предела нагрузки для базового выбора размера двигателя. Эта процедура описана ниже. Затем проверяются другие факторы, чтобы убедиться, что выбрана оптимальная комбинация двигателя и преобразователя.
4 принципа отбора
Рекомендуются пять следующих принципов отбора:
Принцип выбора 1 //
Сначала необходимо выбрать тип и размер двигателя. Число полюсов (базовая скорость) должно быть выбрано таким образом, чтобы двигатель работал как можно быстрее на скорости, немного превышающей базовую скорость 50 Гц.
Это желательно, потому что:
- Тепловая мощность двигателя улучшается на при f ≥ 50 Гц благодаря более эффективному охлаждению на более высоких скоростях.
- Коммутационные потери преобразователя минимальны, когда он работает в диапазоне ослабления поля выше 50 Гц.
- Для нагрузки постоянного крутящего момента больший диапазон скорости получается, когда двигатель работает хорошо в диапазоне ослабления поля на максимальной скорости.Это означает, что наиболее эффективно используется способность крутящего момента / скорости привода с регулируемой скоростью.
 Типичные кривые крутящего момента и мощности при применении постоянной мощности / крутящего момента
Типичные кривые крутящего момента и мощности при применении постоянной мощности / крутящего момента
Это может означать экономию в виде меньшего двигателя и преобразователя . - Хотя многие производители утверждают, что их преобразователи могут генерировать выходные частоты до 400 Гц, эти высокие частоты практически не используются, за исключением очень специальных (и необычных) применений.Конструкция стандартных двигателей с сепаратором и снижение пикового крутящего момента в зоне ослабления поля ограничивают их использование на частотах выше 100 Гц.
Максимальная скорость, на которой может работать стандартный короткозамкнутый двигатель, всегда должна проверяться производителем, особенно для более крупных 2-полюсных (3000 об / м) двигателей мощностью более 200 кВт. Шум вентилятора, создаваемый двигателем, также существенно увеличивается при увеличении скорости двигателя.
- Сравнение крутящего момента, создаваемого 4-полюсным и 6-полюсным двигателем , показано на рисунке 1.Это иллюстрирует более высокий крутящий момент 6-полюсной машины.
 Рисунок 1 — Сравнение предельных кривых теплоемкости для двух короткозамкнутых электродвигателей TEFC мощностью 90 кВт
Рисунок 1 — Сравнение предельных кривых теплоемкости для двух короткозамкнутых электродвигателей TEFC мощностью 90 кВт
- 90 кВт 4-полюсный двигатель (1475 об / мин)
- 90 кВт 6-полюсный двигатель (985 об / мин)
Принцип выбора 2 //
Выбор двигателя увеличенного размера просто для «безопасной» безопасности обычно не рекомендуется , поскольку это означает, что преобразователь частоты слишком большого размера также должен быть выбран.Преобразователи частоты, особенно типа ШИМ, рассчитаны на самое высокое значение пикового тока, которое является суммой основных и гармонических токов в двигателе.
Чем больше двигатель, тем больше пиковые токи.
Во избежание того, что этот пиковый ток превысит проектный предел, никогда не следует использовать преобразователь с двигателем, размер которого больше указанного для него . Даже когда двигатель большего размера слегка нагружен, его пики гармонического тока высоки.
Принцип выбора 3 //
После того, как двигатель был выбран, достаточно просто выбрать правильный размер преобразователя из каталога производителя .Они обычно оцениваются в единицах тока (не кВт) в зависимости от конкретного напряжения. Это следует использовать только в качестве ориентира, поскольку преобразователи всегда следует выбирать исходя из максимального продолжительного тока двигателя.
Хотя большинство каталогов основано на стандартных значениях мощности двигателя IEC (кВт), у двигателей разных производителей значения тока немного отличаются.
 Преобразователи частоты Danfoss (фото любезно предоставлено: schulz.st)
Преобразователи частоты Danfoss (фото любезно предоставлено: schulz.st)
Принцип выбора 4 //
Хотя кажется очевидным, двигатель и преобразователь должны быть указаны для напряжения питания и частоты, к которой должен быть подключен привод с регулируемой скоростью.
В большинстве стран, использующих стандарты МЭК, стандартное напряжение питания составляет 380 В ± 6%, 50 Гц . В Австралии это 415 В ± 6%, 50 Гц . В некоторых приложениях, где размер привода очень велик, часто экономно использовать более высокие напряжения для снижения стоимости кабелей. Другие обычно используемые напряжения: 500 В и 660 В .
В последние годы преобразователи переменного тока производятся для использования при напряжении 3,3 кВ и 6,6 кВ . Преобразователи частоты предназначены для выработки того же выходного напряжения, что и напряжение питания, поэтому для двигателя и преобразователя должно быть указано одинаковое базовое напряжение.
Хотя выходная частота преобразователя является переменной, входная частота (50 Гц или 60 Гц) должна быть четко указана , поскольку это может повлиять на конструкцию индуктивных компонентов .
. ,Рекомендации по выбору двигателя
Двигатель выбирается в соответствии с основной информацией о процессе. Диапазон скоростей, кривые крутящего момента, метод вентиляции и нагрузка двигателя дают рекомендации по выбору двигателя. Часто стоит сравнивать разные двигатели, потому что выбранный двигатель влияет на размер преобразователя частоты.
 Выбор подходящего преобразователя частоты и двигателя для этих 3 применений (фото предоставлено Pogoni ETF)
Выбор подходящего преобразователя частоты и двигателя для этих 3 применений (фото предоставлено Pogoni ETF)
При выборе подходящего преобразователя частоты следует учитывать несколько моментов.
Параметры для рассмотрения
Производители преобразователей частоты обычно имеют определенные таблиц выбора , где указаны типичные значения мощности двигателя для каждого размера преобразователя.
Расчетный ток также может быть рассчитан, когда известны характеристики крутящего момента. Соответствующие значения тока можно рассчитать по профилю крутящего момента и сравнить с пределами тока преобразователя. Номинальный ток двигателя дает некоторую индикацию.
Однако это не всегда наилучший из возможных критериев определения размеров , поскольку, например, двигатели могут быть снижены до (температура окружающей среды, опасная зона и т. Д.).).
Доступное напряжение питания необходимо проверить перед выбором преобразователя частоты. Изменения напряжения питания влияют на доступную мощность на валу двигателя. Если напряжение питания ниже номинального, точка ослабления поля смещается на более низкую частоту и доступный максимальный крутящий момент двигателя уменьшается в диапазоне ослабления поля.
Максимальный доступный крутящий момент часто ограничивается преобразователем частоты. Это необходимо учитывать уже на этапе выбора двигателя .Преобразователь частоты может ограничить крутящий момент двигателя раньше, чем указано в техническом описании производителя двигателя.
Максимальный доступный крутящий момент также зависит от трансформаторов, реакторов, кабелей и т. Д. в системе, поскольку они вызывают падение напряжения и, следовательно, максимально доступный крутящий момент может падать. Потери мощности в системе должны компенсироваться также номинальным преобразователем частоты.
3 приложения для преобразователя частоты и двигателя
- Применение насоса и вентилятора
- Приложение постоянного крутящего момента
- Постоянная мощность приложения
1.Применение насоса и вентилятора
Некоторые этапы определения размеров насоса и вентилятора:
- Проверьте диапазон скорости и рассчитайте мощность с максимальной скоростью.
- Проверьте начальный момент затяжки.
- Выберите номер полюса двигателя. Наиболее экономичная рабочая частота часто находится в диапазоне ослабления поля.
- Выберите мощность двигателя, чтобы мощность была доступна на максимальной скорости. Помните о термической нагрузке.
- Выберите преобразователь частоты.Используйте рейтинг насоса и вентилятора. Если номинальные характеристики насоса и вентилятора недоступны, выберите преобразователь частоты в соответствии с профилем тока двигателя.
Пример //
Насос имеет нагрузку 150 кВт при скорости 2000 об / мин . Нет необходимости в пусковом моменте.
Раствор //
Необходимый крутящий момент при 2000 об / мин составляет T = 9550 × 150/2000 Нм = 716 Нм . Кажется, что 2-полюсные или 4-полюсные двигатели являются альтернативными вариантами для этого применения.
 Рисунок 1 — Кривые нагрузки двигателя при применении насоса и вентилятора. Сравнение 1) 2-полюсных и 2) 4-полюсных двигателей.
Рисунок 1 — Кривые нагрузки двигателя при применении насоса и вентилятора. Сравнение 1) 2-полюсных и 2) 4-полюсных двигателей.
1) Мотор р = 2
Для 2-полюсного двигателя нагрузка при 2000 об / мин в соответствии с кривой грузоподъемности составляет около 95 процентов . Номинальный крутящий момент двигателя должен быть не менее:
T n ≥ 716 / 0,95 Нм = 754 Нм
Соответствующая номинальная мощность должна быть не менее:
P n ≥ 754 × 3000/9550 кВт = 237 кВт
A 250 кВт (400 В, 431 A, 50 Гц, 2975 об / мин и 0.87) мотор выбран. Номинальный крутящий момент двигателя составляет:T n = 250 × 9550/2975 Нм = 803 кВт
Ток двигателя при 2000 об / мин, скорость (постоянный диапазон потока) составляет приблизительно:
i м = (T нагрузка / T n ) × I n = (716 / 803) × 431 = 384 A
Минимальный длительный ток для преобразователя частоты составляет 384 А.
2) Мотор р = 4
Для 4-полюсного двигателя нагрузка при 2000 об / мин составляет 75 процентов . Минимальный номинальный крутящий момент двигателя составляет:
T n ≥ 716 / 0,75 Нм = 955 Нм
Минимальная мощность для 4-полюсного двигателя: P n ≥ 955 × 1500/9550 кВт = 150 кВт
Двигатель мощностью 160 кВт (400 В, 305 А, 50 Гц, 1480 об / мин и 0,81) соответствует условиям.Примерный ток при скорости 2000 об / мин (66,7 Гц) составляет:i м = (T нагрузка / Tn) × (н / н n ) × I n = (P нагрузка / P n ) × I n = 150/160 × 305 A = 286 A
Точный ток следует рассчитывать, если номинальный ток выбранного преобразователя частоты близок к приблизительному току двигателя. Для 4-полюсного двигателя требуется меньший ток в рабочей точке насоса.Таким образом, это, вероятно, более экономичный выбор, чем 2-полюсный двигатель.
Вернуться к содержанию ↑
2. Приложение постоянного крутящего момента
Некоторые этапы определения параметров приложения постоянного крутящего момента:
- Проверьте диапазон скоростей.
- Проверьте необходимый постоянный крутящий момент.
- Проверьте возможные ускорения. Если необходимы ускорения, проверьте моменты инерции.
- Проверьте возможный начальный требуемый крутящий момент.
- Выберите двигатель так, чтобы крутящий момент был ниже кривой тепловой нагрузки (раздельная / самовентиляция?). Обычно номинальная скорость двигателя находится в середине используемого диапазона скоростей.
- Выберите подходящий преобразователь частоты в соответствии с расчетным током.
Пример //
Экструдер имеет диапазон скоростей , 300-1200 об / мин, . Нагрузка при 1200 об / мин составляет 48 кВт . Начальный крутящий момент составляет 200 Нм .Время разгона с нулевой скорости до об / мин 1200 составляет 10 секунд .
Двигатель самовентилируется, а номинальное напряжение составляет 400 В .
Раствор //
Требуемое значение постоянного крутящего момента: Подходящим двигателем является 4-полюсный или 6-полюсный двигатель .
T = 9550 × 48/1200 Нм = 382 Нм
 Рисунок 2 — Кривые нагрузки двигателя при приложении постоянного крутящего момента.сравнение 1) 4-полюсных и 2) 6-полюсных двигателей.
Рисунок 2 — Кривые нагрузки двигателя при приложении постоянного крутящего момента.сравнение 1) 4-полюсных и 2) 6-полюсных двигателей.
1) Мотор р = 4
При скорости 300 об / мин тепловая нагрузка составляет 80 процентов . Расчетный минимальный номинальный крутящий момент составляет:
T n ≥ 382 / 0,8 Нм = 478 Нм
Минимальная номинальная мощность двигателя: P n ≥ 478 × 1500/9550 кВт = 75 кВт
Подходящим двигателем является, например, 75 кВт (400 В, 146 А, 50 Гц, 1473 об / мин и 0.82) Мотор . Номинальный крутящий момент двигателя:T n = 75 × 9550/1473 Нм = 486 кВт
Ток двигателя приблизительно (T / Tn ≈ 0,8):
i м = (нагрузка T / T n ) × I n = (382/486) × 146 = 115 A
В соответствии с рассчитанным током двигателя можно выбрать подходящий преобразователь частоты для использования постоянного крутящего момента.Начальный крутящий момент (200 Нм) не является проблемой для этого двигателя. Если момент инерции двигателя составляет 0,72 кгм 2 , динамический момент ускорения составляет:
Т дин = (2π / 60) × (1200/10) × 0,72 Нм = 9 Нм
Таким образом, общий крутящий момент при ускорении составляет 391 Нм, что меньше номинального крутящего момента двигателя .
2) Мотор р = 6
При скоростях 300 об / мин и 1200 об / мин нагрузка двигателя составляет 84 процента .Таким образом, минимальный номинальный крутящий момент 6-полюсного двигателя составляет:
T n ≥ 382 / 0,84 Нм = 455 Нм
Минимальное значение номинальной мощности двигателя:
P n ≥ 455 × 1000/9550 кВт = 48 кВт
Подходящим двигателем может быть, например, двигатель 55 кВт (400 В, 110 А, 50 Гц, 984 об / мин и 0,82). Номинальный крутящий момент двигателя:T n = 55 × 9550/984 Нм = 534 кВт
Ток определения параметров может быть аппроксимирован на скорости 1200 об / мин:
i м = (T нагрузка / T n ) × (n / n n ) × I n = (P нагрузка / P n ) × I n = (48/55) × 110 A = 96 A
Номинальный (непрерывный) ток преобразователя частоты должен быть через 96 A .Начальный крутящий момент меньше номинального крутящего момента двигателя. Если инерция двигателя составляет 1,2 кгм 2 , то динамический момент ускорения составляет:
Т дин = (2π / 60) × (1200/10) × 1,2 Нм = 15 Нм
Общий крутящий момент, необходимый во время ускорения, составляет 397 Нм , что меньше номинального крутящего момента двигателя. Ток 6-полюсного двигателя на 19 A на меньше, чем у 4-полюсного двигателя. Окончательный выбор преобразователя частоты / двигателя зависит от размеров и цены корпуса двигателя и преобразователя частоты.
Вернуться к содержанию ↑
3. Приложение постоянной мощности
Некоторые этапы расчета постоянной мощности:
- Проверьте диапазон скоростей.
- Рассчитайте необходимую мощность. Намотки — это типичные приложения постоянной мощности.
- Определите размеры двигателя таким образом, чтобы использовался диапазон ослабления поля.
Пример //
Устройство волочения проволоки управляется преобразователем частоты.Поверхностная скорость барабана составляет 12 м / с , а натяжение составляет 5700 Н . Диаметры барабана составляют 630 мм (пустой барабан) и 1250 (полный барабан) . Существует шестерня с передаточным отношением n 2 : n 1 = 1: 7.12 , а КПД шестерни составляет 0,98 .
Выберите подходящий двигатель и преобразователь для этого применения.
Раствор //
Основная идея моталки заключается в том, чтобы поддерживать постоянную скорость поверхности и натяжение при изменении диаметра.
 Рисунок 3 — Принципиальная схема моталки
Рисунок 3 — Принципиальная схема моталки
В прямолинейном движении мощность: P = Fv
Во вращательном движении мощность: P = Tω
Соотношение между поверхностной скоростью и угловой скоростью:
- В [м / с] = ( ω × r = 2π × n [об / мин] × r) / 60
- n [об / мин] = 60 × v / 2π × r
Крутящий момент — это произведение силы и радиуса: T = Fr
С помощью приведенных выше формул можно выбрать двигатель:
- P = 5700 Н × 12 м / с = 68.4 кВт
- Т 1 = 5700 Н × 0,63 / 2 м = 1796 Нм
- n 1 = 12 × 60 / π × 0,63 об / мин = 363,8 об / мин
- Т 2 = 5700 Н × 1,25 / 2 м = 3563 Нм
- n 2 = 12 × 60 / π × 1,25 об / мин = 183,3 об / мин
Перед выбором двигателя необходимо учитывать передачу. Скорости, крутящие моменты и мощность должны быть уменьшены:
- P = P / η , редуктор = 68.4 / 0,98 кВт = 69,8 кВт
- Т 1 = (1796 / 0,98) × (1 / 7,12) Нм = 275 Нм
- n 1 = 363,8 × 7,12 об / мин = 2590 об / мин
- Т 2 = (3563 / 0,98) × (1 / 7,12) Нм = 1305 Нм
2) Мотор р = 2
Если выбран 2-полюсный двигатель, нагрузочная способность при скорости 1305 об / мин составляет около , 88 процентов и 97 процентов при 2590 об / мин .Минимальная номинальная мощность двигателя:
P n ≥ (511 × 3000) / (0,88 × 9550) кВт = 182 кВт
Двигатель 200 кВт (400 В, 353 А, 50 Гц, 2975 об / мин и 0,86) выбран. Номинальный крутящий момент двигателя:T n = 200 × 9550/2975 Нм = 642 Нм
Расчетный ток рассчитывается в соответствии с крутящим моментом 511 Нм :
i м = (T нагрузка / T n ) × I n = (511/642) × 353 A = 281 A
2) Мотор р = 4
Если выбран 4-полюсный двигатель, из кривой нагрузочной способности видно, что нагрузочная способность при скорости 1305 об / мин составляет около 98 процентов и около 60 процентов при 2590 об / мин .Минимальная номинальная мощность двигателя:
P n ≥ (511 × 1500) / (0,98 × 955) кВт = 82 кВт
90 кВт (400 В, 172 А, 50 Гц, 1473 об / мин и 0,83) выбрано . Номинальный крутящий момент двигателя:T n = 90 × 9550/1473 Нм = 584 кВт
В этом случае измерение производится в соответствии с током двигателя при 1305 об / мин . Ток двигателя:
i м = (T / T n ) × I n = (511/584) × 172 A = 151 A
В случае 2-полюсного двигателя диапазон ослабления поля (постоянной мощности) не использовался, что приводило к ненужному превышению размеров. 4-полюсный двигатель — лучший выбор для этого применения.
Вернуться к содержанию ↑
Ссылка // Определение размеров системы привода по ABB
,Подогрев двигателя
Существует много причин, по которым электродвигатель может начать нагреваться. Например, когда используется другой режим запуска, отличный от указанного на заводской табличке двигателя, это может привести к перегреву двигателя и последующему повреждению двигателя.
 Практические советы о том, как не перегореть электродвигатель
Практические советы о том, как не перегореть электродвигатель
Из-за высоких пусковых токов в асинхронных электродвигателях время, необходимое для ускорения высокоинерционных нагрузок, приведет к внезапному повышению температуры двигателя.Если интервал между последовательными запусками очень короткий, обмотки двигателя могут перегреться, что приведет к некоторому повреждению или сокращению срока их службы.
На температуру обмотки двигателя влияет тепло, поступающее от различных источников. Эти источники могут быть внутренними по отношению к двигателю в результате его работы, или они могут быть внешними по отношению к двигателю в результате его окружающей среды. На температуру также влияет способность двигателя рассеивать это тепло.
Давайте обсудим наиболее важные темы, связанные с нагревом асинхронного двигателя:
-
- Нагрев обмотки
- Потери
- Тепловыделение
- Температура наружной поверхности двигателя
- Срок службы мотора
- Классы изоляции
- Измерение повышения температуры обмотки
- Применение электродвигателя, приводящее к перегреву
- General
- Вариации нагрузки двигателя
- Повторяющиеся запуска и остановки
- Инерция нагрузки
- Колебания напряжения и частоты
- Работа с преобразователями частоты
- Недостаточная высота
- Плохая вентиляция
- Нагрев обмотки
1.Нагрев обмотки
1,1 потери
Эффективная или полезная выходная мощность, подаваемая двигателем на конце вала, ниже, чем мощность, потребляемая двигателем от источника питания, т.е. эффективность двигателя всегда ниже 100%.
Разница между входом и выходом представляет потерь, которые преобразуются в тепло . Это тепло нагревает обмотки и поэтому должно быть снято с двигателя, чтобы избежать чрезмерного повышения температуры.
Этот отвод тепла должен быть обеспечен для всех типов двигателей.
В автомобильном двигателе, например, в двигателях с воздушным охлаждением тепло, выделяемое внутренними потерями, должно быть удалено из блока двигателя потоком воды через радиатор или вентилятор.
Вернуться к содержанию ↑
1,2 Теплоотдача
Тепло, создаваемое внутренними потерями, рассеивается в окружающем воздухе через внешнюю поверхность рамы. В полностью закрытых двигателях этому рассеиванию обычно способствует вентилятор, установленный на валу.
Хорошее тепловыделение зависит от:
- КПД вентиляционной системы
- Общая площадь рассеяния тепла рамы
- Разница температур между внешней поверхностью рамы и окружающим воздухом (т экст. — т а )
Рекомендации
Действие № 1 — Хорошо спроектированная система вентиляции, а также эффективный вентилятор, способный пропускать большой объем воздуха, должны направлять этот воздух по всей окружности рамы для достижения необходимого теплообмена.
Большой объем воздуха абсолютно бесполезен, если ему позволено распространяться, не отводя тепло от двигателя .
Действие № 2 — Площадь рассеяния должна быть максимально большой. Однако двигатель с очень большой рамой требует очень большой площади охлаждения и, следовательно, становится слишком дорогим, слишком тяжелым и требует слишком много места для установки.
Для получения максимально возможной площади при одновременном минимальном размере и весе (экономическое требование) вокруг рамы установлены охлаждающие вентиляторы .
Действие № 3 — Эффективная система охлаждения — это система, которая способна рассеивать максимально возможное количество тепла через наименьшую площадь рассеяния.
Следовательно, необходимо, чтобы внутреннее падение температуры, показанное на рисунке 7.1, было минимизировано. Это означает, что хороший теплообмен должен происходить изнутри на внешнюю поверхность двигателя.
Как объяснено, цель состоит в том, чтобы уменьшить внутреннее падение температуры (т.е.улучшить теплопередачу), чтобы получить максимально возможное падение температуры наружного воздуха, необходимое для хорошего отвода тепла.
Внутреннее падение температуры зависит от различных факторов, которые указаны на рисунке 1, где температуры определенных важных областей показаны и объяснены следующим образом:
 Рисунок 1 — Внутреннее падение температуры зависит от различных факторов
Рисунок 1 — Внутреннее падение температуры зависит от различных факторов
Где:
A — Самая горячая точка намотки находится в центре пазов, где выделяется тепло в результате потерь в проводниках.
AB — Падение температуры происходит из-за теплопередачи от самой горячей точки к внешним проводам . Поскольку воздух является очень плохим проводником тепла, очень важно предотвращать пустоты внутри пазов, то есть обмотки должны быть компактными и идеально пропитанными лаком.
B — Падение температуры через изоляцию прорези, контакт изоляционного материала с проводниками и контакт с сердечниками.
Благодаря использованию современных материалов теплоизоляция значительно улучшает теплопередачу.Идеальная пропитка улучшает контакт с внутренней стороной, устраняя пустоты. Идеальное выравнивание слоистых материалов улучшает контакт с внешней стороной, устраняя слои воздуха, которые негативно влияют на теплообмен.
г. до н.э. — Падение температуры при прохождении через статор материала ламинирования
C — Понижение температуры при контакте между сердечником статора и рамой. Теплопередача зависит от идеального контакта между деталями, хорошего выравнивания расслоений и точности обработки рамы.
Неровные поверхности оставляют пустые места, что приводит к плохому контакту и, следовательно, к плохой теплопередаче .
CD — Понижение температуры при передаче по толщине рамы.
Благодаря современному дизайну, использованию первоклассного материала, улучшенным производственным процессам и постоянному контролю качества, электродвигатели ДОЛЖНЫ обеспечивать отличные свойства теплопередачи от двигателя внутрь к наружу, таким образом устраняя «горячие точки» в обмотках .
Вернуться к содержанию ↑
1,3 Температура наружной поверхности двигателя
На рисунке ниже показаны рекомендуемые места, где температуру внешней поверхности электродвигателя следует проверять с помощью калиброванных приборов для измерения температуры:
 Рисунок 2 — Рекомендуемые места, где следует проверять температуру внешней поверхности электродвигателя
Рисунок 2 — Рекомендуемые места, где следует проверять температуру внешней поверхности электродвигателя
Важно! Измерьте также температуру окружающей среды (при макс.расстояние 1 м ( от мотора).
Вернуться к содержанию ↑
2. Срок службы мотора
Как вы уже знаете, полезный срок службы двигателя зависит почти исключительно от срока службы изоляции обмотки .
Срок службы двигателя зависит от многих факторов, таких как влажность, вибрация, агрессивные среды и другие. Среди всех этих факторов наиболее важным является рабочая температура используемых изоляционных материалов.
Вы должны знать, что при увеличении на 8-10 градусов выше номинального температурного класса системы изоляции может сократить срок службы двигателя вдвое.
Говоря об уменьшении полезного срока службы двигателя, мы не говорим о высоких температурах, когда система изоляции горит, а обмотка внезапно разрушается. Для срока службы изоляции это означает постепенное старение изоляционного материала, который становится сухим, теряя свои изоляционные свойства до тех пор, пока не сможет выдержать приложенное напряжение.
Это приводит к выходу из строя системы изоляции и последующему короткому замыканию обмоток.
Опыт показывает, что изоляционная система имеет практически неограниченный срок службы, если температура поддерживается ниже определенного предела, если этот предел температуры превышен, срок службы изоляции будет сокращаться при повышении температуры.
Этот температурный предел значительно ниже температуры «горения» системы изоляции и зависит от типа используемого изоляционного материала.
Этот предел температуры относится к самой горячей точке в системе изоляции, но не обязательно ко всей обмотке. Одного слабого места во внутренней части обмоток будет достаточно для разрушения системы изоляции.
Рекомендуется использовать датчики температуры в качестве дополнительных защитных устройств для электродвигателя. Эти защитные устройства обеспечат более длительный срок службы и большую надежность процесса.
Настройка сигнализации и / или отключения должна выполняться в соответствии с температурным классом двигателя.
Вернуться к содержанию ↑
3. Классы изоляции
Определение класса изоляции
Как уже упоминалось ранее, предел температуры зависит от типа используемого материала. Чтобы соответствовать стандартам, изоляционный материал и системы изоляции (каждая из которых образована комбинацией нескольких материалов) сгруппированы в ИЗОЛЯЦИОННЫЕ КЛАССЫ .
Каждый из них определяется конкретным пределом температуры , т.е.е. самой высокой температурой, которую изоляционный материал или система могут выдерживать непрерывно, не влияя на срок его службы.
Классы изоляции, используемые для электрических машин, и соответствующие им пределы температуры соответствуют МЭК 60034-1 :
- Класс A (105 ºC)
- Класс E (120 ºC)
- Класс B (130 ºC)
- Класс F (155 ºC)
- Класс H (180 ºC)
Вернуться к содержанию ↑
4.Измерение повышения температуры обмотки
Было бы довольно трудно измерить температуру обмотки с помощью термометров или термопар, так как температура отличается от одного места к другому, и невозможно узнать, находится ли точка измерения рядом с самым горячим местом.
Наиболее точный и надежный метод определения температуры обмотки — это путем измерения и изменения сопротивления обмотки как функции температуры .
Измерение повышения температуры методом сопротивления для медных проводников рассчитывается по следующей формуле:

где:
- Δt — повышение температуры;
- т 1 — температура обмотки перед испытанием, которая должна быть практически равна охлаждающей среде, измеренная термометром;
- т 2 — температура обмотки по окончании испытания;
- т, , а , — температура охлаждающей среды при завершении испытаний;
- R 1 — сопротивление обмотки до испытания;
- R 2 — сопротивление обмотки в конце испытания.
Вернуться к содержанию ↑
5. Применение электродвигателя
5.1 Общая информация
Температура самой горячей точки в обмотке должна поддерживаться ниже максимально допустимой температуры для класса изоляции. Общая температура представляет собой сумму температуры окружающей среды, плюс повышение температуры (∆t) плюс разница, существующая между средней температурой обмотки и самой горячей точкой.
Стандарты двигателяопределяют максимальное повышение температуры ∆t , поэтому температура самой горячей точки остается в допустимых пределах, исходя из следующих соображений:
- Температура окружающей среды не должна превышать 40 ºC , в соответствии со стандартом.Выше этого значения условия труда рассматриваются как особые условия эксплуатации.
- Разница между средней температурой обмотки и самой горячей точкой не сильно отличается от двигателя к двигателю, и ее значение, указанное в стандарте, составляет 5 ºC для классов A и E, 10 ºC для классов B и F и 15 ºC для класса H .
Поэтому в стандартах на двигатели указана максимальная допустимая температура окружающей среды , равная , а также максимально допустимое повышение температуры для каждого класса изоляции.Таким образом, температура самой горячей точки косвенно ограничена.
Цифры и допустимый температурный состав для самой горячей точки показаны в таблице 1 ниже:
Таблица 1 — Температурный состав как функция класса изоляции
| Класс изоляции | A | E | B | F | H | |
| Температура окружающей среды | ° C | 40 | 40 | 40 | 40 | 40 |
| ∆t = повышение температуры (метод сопротивления) |
° C | 60 | 75 | 80 | 105 | 125 |
| Разница между самой горячей точкой и средней температурой. | ° C | 5 | 5 | 10 | 10 | 15 |
| Итого: температура самой горячей точки | ° C | 105 | 120 | 130 | 155 | 180 |
Вернуться к содержанию ↑
5,2 вариации нагрузки двигателя
Двигатель, работающий с номинальной нагрузкой или выше, будет генерировать больше тепла и будет иметь более высокий рост температуры, чем двигатель, работающий на меньшей мощности, чем указанная в паспортной мощности.
См. Таблицу 2 с типичными рабочими данными для приложения, требующего непрерывной работы 1150 л.с., при установке двигателя мощностью 1000 л.с. с коэффициентом сервисного обслуживания 1,15 изначально может быть на 11% меньше, чем при установке машины с коэффициентом обслуживания 1,050 1250 л.с.
Таблица 2 — Повышение температуры и КПД 1250 л.с. против вариаций двигателя 1000 л.с.
| Номинальная HP |
% из Номинальная Нагрузка |
Фактический HP |
Темп. Повышение ** (° C) |
Мотор КПД |
Относительно Изоляция Жизнь |
Относительно Стоимость |
| 1000 | 115 | 1150 | 90,0 | 94,2 | 1,0 | 1,00 |
| 1000 | 100 | 1000 | 71.0 | 94,6 | 3,8 | |
| 1000 | 75 | 750 | 47,8 | 94,9 | 19,5 | |
| 1000 | 50 | 500 | 32,7 | 94,4 | > 20 | |
| 1250 | 100 | 1250 | 80,0 | 94,8 | 2,0 | 1,11 |
| 1250 | 92 | 1150 | 70.3 | 95,0 | 3,9 | |
| 1250 | 80 | 1000 | 56,6 | 95,2 | 10,7 | |
| 1250 | 60 | 750 | 42,0 | 94,8 | > 20 | |
| 1250 | 50 | 625 | 36,6 | 94,7 | > 20 |
** Повышение температуры на сопротивление
Тем не менее, больший двигатель будет иметь 3.В 9 раз больше ожидаемого срока службы изоляции и на 0,8% (95,0 — 94,2) большей эффективности , что, вероятно, приведет к снижению стоимости жизненного цикла.
Обратите внимание, что для непрерывной работы при 1000 л.с. двигатель большего размера будет иметь примерно в 2,8 раза больше ожидаемого срока службы (10,7, деленного на 3,8) и КПД на 0,6% (на 95,2 меньше, чем на 94,6).
Для большинства конструкций асинхронных двигателей характерно, что КПД нагрузки выше, чем КПД при полной нагрузке. И наоборот, эффективность на 1.15 Сервисный коэффициент обычно ниже, чем при номинальной нагрузке.
Вернуться к содержанию ↑
5,3 повторяющихся запусков и остановок
Когда двигатель запускается под нагрузкой , он обычно потребляет ток, в шесть-семь раз превышающий нормальный, при ускорении нагрузки . Это приводит к высоким краткосрочным потерям меди и накоплению тепла.
Если затем двигатель останавливается и затем перезапускается до того, как он успел остыть, ситуация усугубляется.
Повторяющиеся пуски и остановки в течение короткого промежутка времени всегда будут оказывать вредное влияние на срок службы обмотки двигателя. — особенности будут зависеть от частоты пусков и остановок, характера нагрузки.
Вернуться к содержанию ↑
5,4 Инерция нагрузки
NEMA определяет стандартные значения инерции для каждого номинального двигателя. Запуск нагрузок с большей инерцией вызовет дополнительное накопление тепла во время ускорения, что может повлиять на срок службы изоляции.
Такие применения должны быть проверены у производителя двигателя , чтобы убедиться в правильности конструкции для конкретного применения .
Вернуться к содержанию ↑
5.5 Колебания напряжения и частоты
Колебания напряжения или частоты системы могут вызвать дополнительное нагревание и привести к преждевременному выходу из строя обмотки.
NEMA указывает, что двигатели подходят для следующих вариантов:
- ± 10% напряжения при номинальной частоте Частота
- ± 5% при номинальном напряжении
- максимум 10% (абсолютные значения) в сочетании с 5% пределом по частоте.
Изменения за пределами этих пределов могут привести к повреждению обмоток двигателя в зависимости от конструкции двигателя .Двигатель с высокой плотностью потока будет более подвержен влиянию условий перенапряжения, поскольку потери в сердечнике возрастут.
Двигатели с более низкой плотностью потока будут в большей степени зависеть от увеличения тока в условиях напряжения.
Чрезмерная частота может привести к перегрузкам двигателей, приводящих в движение центробежные машины; тогда как недостаточная частота может привести к повреждению из-за неэффективного охлаждения двигателей, приводящих в действие постоянные крутящие нагрузки.
Аналогичным образом, дисбаланс более 1% в фазовых напряжениях вызовет токов обратной последовательности, что может привести к перегреву ротора наряду с увеличением температуры обмотки двигателя, уровнями шума и вибрации .
Вернуться к содержанию ↑
5.6 Работа с преобразователями частоты
Работа с приводом с регулируемой скоростью часто приводит к появлению гармоник в двигателе, что может привести к перегреву и локализованным горячим точкам. Гармоники из «грязной» системы питания, даже если сам двигатель не используется с приводом, могут иметь тот же эффект.
По этой причине двигатели , используемые на приводах с регулируемой скоростью, обычно не имеют коэффициента обслуживания больше 1.0
Обычно указываются такие двигатели: «Повышение на 90 ° с помощью RTD при номинальной нагрузке (1,0 SF) на синусоидальной частоте 60 Гц, пригодное для повышения класса F при использовании на преобразователе».
При отсутствии сервисного коэффициента требуется дополнительный коэффициент безопасности 25 °, чтобы компенсировать нагрев от гармоник и снижение вентиляции на более низких скоростях. Следовательно, двигатель, используемый на приводе с номинальной нагрузкой, обычно будет работать горячее, чем его неиспользующий аналог , и будет иметь меньший ожидаемый срок службы изоляции .
Моторы, специально разработанные для использования с приводами, могут быть компенсированы за счет использования воздуходувок, рам большого размера и / или специальных материалов.
Вернуться к содержанию ↑
5,7 Недостаточная высота над уровнем моря
Двигатели, работающие на высоте более 3300 футов, будут подвержены повышенным температурам на градусов выше, чем двигателям на уровне моря , поскольку окружающий воздух менее плотный и, следовательно, будет рассеивать меньше тепла.
Рекомендуется использовать следующие коэффициенты снижения номинальной мощности, указанные на паспортной табличке, при работе двигателя на больших высотах:
- 3% между 3300 и 5000 футами
- 6% между 5000 и 6600 футами
- 10% между 6600 и 8300 футами
- 14% между 8300 и 9900 футами
Вернуться к содержанию ↑
5.8 Плохая вентиляция
Двигатели, которые работают в нечистых или очень ограниченных условиях , которые препятствуют надлежащей вентиляции двигателя , будут подвергаться перегреву и сокращению срока службы.
Вернуться к содержанию ↑
Список литературы //
- Спецификация электродвигателей по WEG
- Срок службы двигателя: влияние нагрузки, фактора эксплуатации и повышения температуры на срок службы изоляции. Автор Брюс Кэмпбелл и Хосе Галлено
Какой размер преобразователя частоты мне нужен?
Преобразователь частоты (FC) рейтинг
При определении номинальной частоты преобразователя частоты при данной нагрузке первым шагом является рассмотрение характеристик нагрузки . Существует четыре различных метода для расчета требуемой производительности на выходе, и выбор метода зависит от данных двигателя. Однако сначала давайте начнем с основ характеристик нагрузки двигателя.
 Какой размер преобразователя частоты мне нужен (фото предоставлено Danfoss)
Какой размер преобразователя частоты мне нужен (фото предоставлено Danfoss)
Характеристики нагрузки
Прежде чем определить размер преобразователя частоты, необходимо провести различие между двумя наиболее широко используемыми характеристиками нагрузки.На рисунке 1 показаны четырех наиболее типичных нагрузок двигателя и их характеристики.
 Рисунок 1 — Типичные характеристики нагрузки двигателя
Рисунок 1 — Типичные характеристики нагрузки двигателя
Группа 1 — Машины для намотки материала под напряжением (машины для резки шпона)
Группа 2 — Конвейерные ленты, краны, насосы прямого вытеснения, а также станки
Группа 3 — Машины, такие как ролики, сглаживающие машины и другие обрабатывающие машины
Группа 4 — Машины, работающие на центробежной силе (центрифуги, центробежные насосы и вентиляторы)
Причины для разграничения характеристик нагрузки следующие //
Когда скорость центробежных насосов и вентиляторов увеличивается, потребность в мощности увеличивается на кубическую скорость (P = n 3 ).Обычный рабочий диапазон центробежных насосов и вентиляторов составляет от 50 до 90%. Коэффициент нагрузки увеличивается на квадрат скорости, т.е. ок. От 30 до 80% .
 Рисунок 2 — Постоянный и квадратный момент нагрузки
Рисунок 2 — Постоянный и квадратный момент нагрузки
Эти два фактора показаны в характеристиках крутящего момента двигателя, управляемого преобразователем частоты. На рис. 3 и рис. 4 показаны характеристики крутящего момента для двух разных размеров FC — один из них (рис. 4) на один диапазон мощности ниже другого.
Для обеих характеристик крутящего момента были введены одинаковые характеристики нагрузки для центробежного насоса .
На рисунке 3 общий рабочий диапазон насоса (0-100%) лежит в пределах номинальных значений двигателя. Поскольку нормальный рабочий диапазон насоса составляет 30-80% , можно выбрать преобразователь частоты с более низкой выходной мощностью.
 Рисунки 3 и 4 — Слева: «Большой» преобразователь частоты; Справа: «меньший» преобразователь частоты
Рисунки 3 и 4 — Слева: «Большой» преобразователь частоты; Справа: «меньший» преобразователь частоты
Если крутящий момент нагрузки постоянен, двигатель должен иметь возможность генерировать больше крутящего момента нагрузки, поскольку избыточный крутящий момент используется для ускорения.
Момент перегрузки 60% , создаваемый преобразователем частоты в течение короткого времени, достаточен для ускорения и высокого пускового крутящего момента, например, в связи с конвейерными лентами .
Крутящий момент при перегрузке также гарантирует, что система сможет справиться с резким увеличением нагрузки. Преобразователь частоты, который не допускает перегрузочный момент, должен быть выбран таким образом, чтобы момент ускорения (TB) находился в пределах номинального момента.
 Рисунок 5 — Крутящий момент перегрузки используется для ускорения
Рисунок 5 — Крутящий момент перегрузки используется для ускорения
4 метода с различными наборами данных двигателя //
После определения характеристик нагрузки существует четыре разных набора данных двигателя для определения величины мощности преобразователя частоты (FC).
Метод № 1 (текущий Im)
Преобразователь частоты может быть определен быстро и точно на основе тока I M , который двигатель принимает . Если двигатель не полностью загружен, ток двигателя может быть измерен в аналогичной системе при полной работе.
 Рисунок 6 — Выбор преобразователя частоты на основе номинального тока
Рисунок 6 — Выбор преобразователя частоты на основе номинального тока
Пример // Двигатель мощностью 3,5 кВт, 3 х 400 В, потребляет 14,73 А.
Ссылаясь на технические данные преобразователя частоты, выбирается преобразователь частоты, который имеет максимальный непрерывный выходной ток , больший или равный 14.73 A с постоянными или квадратными характеристиками крутящего момента.
Примечание // Если преобразователь частоты выбран на основе мощности (методы 2-4), важно, чтобы рассчитанная мощность и мощность, указанные в технических данных для FC, сравнивались при одном и том же напряжении.
В этом нет необходимости, если FC рассчитывается на основе тока (метод 1) , так как выходной ток FC влияет на другие данные.
Метод № 2 (полная мощность Sm)
Преобразователь частоты может быть выбран на основе полной мощности S M , потребляемой двигателем, и полной мощности, передаваемой преобразователем частоты.
 Рисунок 7 — Выбор преобразователя частоты на основе полной мощности
Рисунок 7 — Выбор преобразователя частоты на основе полной мощности
Пример // Мощность двигателя 7,5 кВт, 3 × 400 В 14,73 A

Ссылаясь на технические данные преобразователя частоты, выбирается, чья максимальная длительная мощность на больше или равна 10,2 кВА при постоянных или квадратных характеристиках крутящего момента.
Метод № 3 (мощность Pm)
Преобразователь частоты также может быть выбран в соответствии с мощностью P M , генерируемой двигателем .Однако, поскольку cos φ и эффективность η меняются в зависимости от нагрузки, этот метод является неточным.
 Рисунок 8 — Выбор преобразователя частоты в соответствии с выходной мощностью вала
Рисунок 8 — Выбор преобразователя частоты в соответствии с выходной мощностью вала
Пример // Двигатель 3 кВт с КПД и cos φ 0,80 или 0,81 работает следующим образом //

Выбран преобразователь частоты — в соответствии с техническими данными преобразователя частоты — который имеет максимальный непрерывный выходной сигнал , больший или равный 4.6 кВА при постоянных или квадратных характеристиках крутящего момента.
Метод № 4 (стандартная серия двигателей)
По практическим соображениям номинальная мощность большинства преобразователей частоты соответствует стандартной серии асинхронных двигателей . Следовательно, преобразователи частоты часто выбираются на этой основе, но это может привести к неточным размерам, в частности, если двигатель не подвергается полной нагрузке.
 Рисунок 9 — Выбор преобразователя частоты на основе стандартной серии двигателей
Рисунок 9 — Выбор преобразователя частоты на основе стандартной серии двигателей
О технологии с переменной скоростью (ВИДЕО)
Справочник // Факты, которые стоит знать о преобразователях частоты Danfoss
,Похожие записи
