Как работают широтно-импульсные преобразователи постоянного тока. Какие существуют основные топологии ШИП. Каковы преимущества и недостатки импульсных преобразователей. Где применяются ШИП в современной электронике.
Принцип действия широтно-импульсных преобразователей
Широтно-импульсные преобразователи (ШИП) постоянного тока используются для регулирования напряжения путем периодического подключения источника к нагрузке. Основной принцип их работы заключается в следующем:
- Ключевой элемент (транзистор или тиристор) периодически замыкает и размыкает цепь
- На выходе формируются импульсы напряжения
- Среднее значение выходного напряжения регулируется изменением длительности импульсов
- Сглаживающий фильтр на выходе формирует постоянное напряжение
Регулирование осуществляется путем изменения скважности импульсов — отношения длительности импульса к периоду. Чем больше скважность, тем выше среднее выходное напряжение.
Основные топологии ШИП постоянного тока
Существует несколько базовых схем широтно-импульсных преобразователей постоянного тока:
- Понижающий (Buck) преобразователь — выходное напряжение ниже входного
- Повышающий (Boost) преобразователь — выходное напряжение выше входного
- Инвертирующий понижающе-повышающий (Buck-Boost) преобразователь
- Прямоходовой (Forward) преобразователь с трансформатором
- Обратноходовой (Flyback) преобразователь с трансформатором
Выбор конкретной топологии зависит от требуемого соотношения входного и выходного напряжений, мощности, КПД и других параметров.
Преимущества широтно-импульсных преобразователей
ШИП постоянного тока обладают рядом важных достоинств по сравнению с линейными стабилизаторами:
- Высокий КПД (до 95% и выше)
- Малые габариты и масса
- Возможность как понижения, так и повышения напряжения
- Низкие потери на ключевом элементе
- Стабильная работа в широком диапазоне входных напряжений
- Возможность гальванической развязки входа и выхода
Эти преимущества обусловили широкое применение ШИП в современной электронике.

Недостатки импульсных преобразователей
К основным недостаткам ШИП постоянного тока можно отнести:
- Более сложная схемотехника по сравнению с линейными стабилизаторами
- Необходимость применения выходных фильтров
- Генерация электромагнитных помех из-за высокочастотной коммутации
- Возможные пульсации выходного напряжения
- Меньшее быстродействие при изменении нагрузки
Однако в большинстве применений преимущества ШИП перевешивают их недостатки.
Области применения широтно-импульсных преобразователей
ШИП постоянного тока нашли широкое применение в различных областях электроники и электротехники:
- Источники питания компьютеров, серверов, телекоммуникационного оборудования
- Зарядные устройства для аккумуляторов
- Системы электропитания автомобилей и электромобилей
- Регуляторы яркости светодиодного освещения
- Драйверы электродвигателей постоянного тока
- Солнечные инверторы
- Источники бесперебойного питания (ИБП)
Такое разнообразие применений обусловлено высокой эффективностью и гибкостью ШИП.
Основные параметры и характеристики ШИП
При выборе и проектировании широтно-импульсных преобразователей учитывают следующие ключевые параметры:

- Диапазон входных и выходных напряжений
- Максимальный выходной ток
- КПД преобразования
- Рабочая частота коммутации
- Пульсации выходного напряжения
- Диапазон рабочих температур
- Уровень электромагнитных помех
Оптимизация этих параметров позволяет создавать высокоэффективные источники питания для различных применений.
Современные тенденции в развитии ШИП
Основные направления совершенствования широтно-импульсных преобразователей включают:
- Повышение рабочих частот для уменьшения габаритов
- Применение новых полупроводниковых материалов (GaN, SiC)
- Использование цифрового управления
- Интеграция силовых ключей и драйверов в одном корпусе
- Разработка интеллектуальных алгоритмов управления
- Повышение удельной мощности
Эти инновации позволяют создавать все более компактные и эффективные преобразователи.
Проектирование широтно-импульсных преобразователей
При разработке ШИП постоянного тока необходимо решить следующие основные задачи:
- Выбор оптимальной топологии схемы
- Расчет силовых элементов (транзисторов, диодов, дросселей)
- Проектирование системы управления
- Расчет и выбор фильтрующих конденсаторов
- Тепловой расчет и проектирование системы охлаждения
- Разработка печатной платы с учетом электромагнитной совместимости
Современные САПР значительно упрощают процесс проектирования ШИП.
Широтно-импульсные преобразователи постоянного напряжения ШИППН-С-К (стендовое исполнение, компьютеризованное версия)
Навигация:Главная›Для ВУЗов, техникумов и ПУ›Силовая электроника. Преобразовательная техника›Комплекты типового лабораторного оборудования›Широтно-импульсные преобразователи постоянного напряжения›Широтно-импульсные преобразователи постоянного напряжения ШИППН-С-К (стендовое исполнение, компьютеризованное версия)
В избранномВ избранное Артикул: УТ-62 Цена: предоставляется по запросу Задать вопрос по оборудованию |
Габариты: 1820×1650×850 Назначение Примерный перечень лабораторных работ, которые могут проводиться на комплекте лабораторного оборудования «Широтно-импульсные преобразователи постоянного напряжения» ШИППН1-С-К
Состав аппаратной части
Программное и методическое обеспечение
← Назад |
Обработка пищевых продуктов. ИТАЛИЯ
ИТАЛИЯ
Химические технологии. EDIBON
Пищевые технологии. EDIBON
Окружающая среда. EDIBON
3D Физика. EDIBON.
Энергия. EDIBON
Механика и материалы. EDIBON
Гидромеханика и аэродинамика. EDIBON
Термодинамика и термотехника. EDIBON.
Оборудование PHYWE (Германия)
Гидромеханика
Обучающие тренажеры по системам самолетов и кораблей
Конструкции. Архитектура
Испытания материалов
Аэродинамика
Строительные учебные 3D принтеры
Лаборатории National Instruments
Автоматика. Автоматизация и управление производством
Автомобили и автомобильное хозяйство
Альтернативные и возобновляемые источники энергии
Аэрокосмическая техника
Безопасность жизнедеятельности. Защита в чрезвычайных ситуациях
Военная техника.
Вычислительная и микропроцессорная техника. Схемотехника
Газовая динамика. Пневмоприводы и пневмоавтоматика.
Газовое хозяйство
Гидропневмоавтоматика и приводы
Детали машин
Информатика
Источники напряжения, тока и сигналов. Измерительные приборы
Измерительные приборы
Легкая промышленность. Оборудование и технологии общественного питания.
Медицина. Биоинженерия
Метрология. Технические и электрические измерения
Механика жидкости и газа
Микроскопы
Научное и лабораторное исследовательское оборудование
Начертательная геометрия
Нефть, газ.
Оборудование для мастерских электромонтажа и наладки, производственных практик и технического творчества
Прикладная механика
Радиотехника. Телекоммуникации. Сети ЭВМ
Радиоэлектронная аппаратура и бытовая техника
Робототехника и мехатроника
Сельскохозяйственная техника. Контроль качества сельхозпродуктов
Силовая электроника. Преобразовательная техника
- Лабораторные комплексы
- Лабораторный стенд «Преобразовательная техника»
- Демонстрационный комплекс группового пользования «Электроника»
- Комплекты типового лабораторного оборудования
- Лабораторные стенды
Сопротивление материалов
Симуляторы печатных машин
Станки и прессы с компьютерными системами ЧПУ. CAD/CAM-технологии
CAD/CAM-технологии
Теоретическая механика
Строительство. Строительные машины и технологии
Теория механизмов и машин
Теплотехника. Термодинамика
Технология машиностроения. Обработка материалов
Учебные наглядные пособия
Физика
Химия
Экология
Электрические машины. Электропривод
Электромеханика
Электромонтаж
Электроника и микроэлектроника
Электротехника и основы электроники
Электроэнергетика. Релейная защита. Электроснабжение
Энерго- и ресурсосберегающие технологии
Энергоаудит
Производство
Учебное оборудование от Edibon
Широтно-импульсные преобразователи постоянного тока. азначение, принцип действия и классификация широтно-импульсных преобразователей постоянного тока
Электротехника \ Проектирование электроприводов
Страницы работы
21 страница (Word-файл)
Посмотреть все страницы
Скачать файл
Содержание работы
1. Широтно-импульсные преобразователи постоянного тока
Широтно-импульсные преобразователи постоянного тока
1.1. Назначение, принцип действия и классификация широтно-импульсных преобразователей постоянного тока
Изменение величины напряжения потребителя посредством широтно-импульсных преобразователей (ШИП) называют импульсным регулированием.
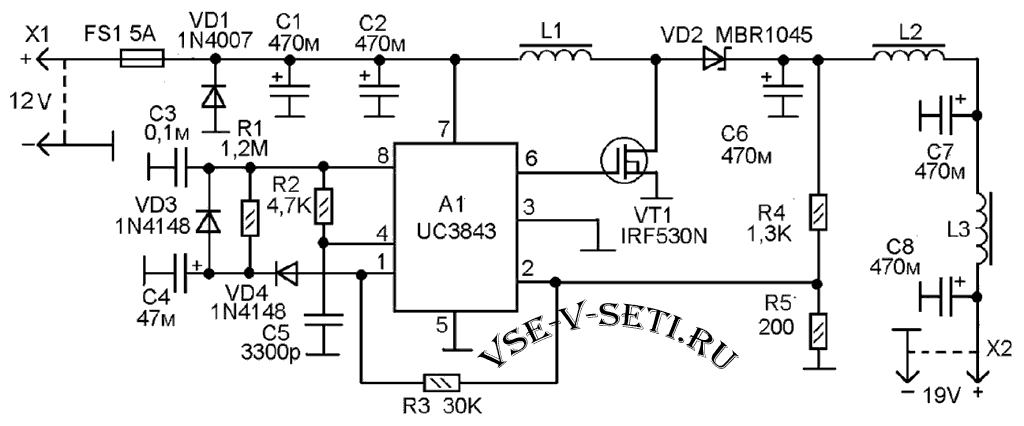
С помощью ШИП источник постоянного или переменного напряжения периодически подключается к нагрузке. В результате на выходе ШИП формируются импульсы напряжения.
В качестве
прерывателя при импульсном управлении используется тиристор, соединяющий и
разъединяющий нагрузку с питающей сетью и преобразующий постоянное напряжение
сети в импульсное напряжение нагрузки. Этот процесс проиллюстрирован на рис.
1.1, где пунктиром очерчен прерыватель, в качестве которого использован тиристор.
На интервале tвкл, когда тиристор находится в
проводящем состоянии, выводы сети соединены с выводами нагрузки. На интервале T– tвкл тиристор закрыт, и выводы нагрузки
закорочены через обратный диод VD0, по которому протекает ток нагрузки. В результате на
нагрузке создается импульсное напряжение Uн, среднее значение которого может быть определено по формуле
В результате на
нагрузке создается импульсное напряжение Uн, среднее значение которого может быть определено по формуле
(1.1)
где tвкл – длительность открытого состояния прерывателя; T – период импульсов; g = tвкл/Т – скважность импульсов.
Рис. 1.1. Принцип действия преобразователя с широтно—импульсным управлением
Таким образом,
регулирование напряжения на нагрузке можно осуществить путем изменения
параметров выходных импульсов tи и T, где tи – длительность выходных импульсов; Т
– период следования выходных импульсов. Наибольшее распространение
получили широтно-импульсный (tи=var,
T= const), частотно-импульсный (tи= const, T= var) и время-импульсный (tи= var, T= var) способы регулирования. При этом
регулируется относительное время проводимости управляемого вентиля, что
приводит к плавному изменению среднего или действующего значения напряжения на
нагрузке.ШИП постоянного напряжения можно классифицировать по ряду признаков .
При этом
регулируется относительное время проводимости управляемого вентиля, что
приводит к плавному изменению среднего или действующего значения напряжения на
нагрузке.ШИП постоянного напряжения можно классифицировать по ряду признаков .
В зависимости от типа применяемых в силовой части полупроводниковых приборов различают: а) ШИП на полностью управляемых вентилях [транзисторах и запираемых (двухоперационных)].
Нереверсивные ШИП преобразуют плавно изменяющееся входное
напряжение в импульсное постоянной амплитуды и полярности, но различной длительности.
Реверсивные ШИП преобразуют плавно изменяющееся входное напряжение или в переменное, разной по полупериодам длительности, или в импульсное постоянной амплитуды, разной длительности и полярности.
В качестве реверсивных обычно используют мостовые
преобразователи. Нереверсивные ШИП могут осуществлять полную или частичную
модуляцию напряжения питающей сети.
Нереверсивные ШИП с полной модуляцией в зависимости от места включения управляемого вентиля и дросселя фильтра подразделяют на три типа. В ШИП первого типа управляемый вентиль и дроссель фильтра включены последовательно с нагрузкой (последовательный ШИП). Характерной особенностью последовательных ШИП – является невозможность получения напряжения на выходе выше напряжения источника питания. Параллельные ШИП – второго типа с последовательным включением дросселя и параллельным включением управляемого вентиля по отношению к нагрузке и третьего типа с последовательным включением управляемого вентиля и параллельным включением дросселя по отношению к нагрузке – позволяют получить напряжение на выходе выше напряжения источника питания.
Выходные
каскады ШИП наиболее просто выполнять на полностью
управляемых вентилях – транзисторах и запираемых (двухоперационных)
тиристорах, отпирание и запирание которых производится с помощью управляющих импульсов.
При выходной мощности более нескольких киловатт в качестве ключей целесообразно применять тиристоры.
Импульсные преобразователи имеют следующие преимущества:
1) высокий к. п. д., так как потери мощности на регулирующем элементе преобразователя незначительны по сравнению с потерями мощности при непрерывном регулировании;
2) малую чувствительность к изменениям температуры окружающей среды, поскольку регулирующим фактором является время проводимости управляемого вентиля, а не внутреннее сопротивление регулирующего элемента, как при непрерывном регулировании;
3) малые габариты и массу; постоянную готовность к работе. Однако импульсным преобразователям присущи и недостатки: 1) импульсный режим работы регулирующего элемента приводит к необходимости устанавливать выходные и часто входные фильтры, что вызывает инерционность процесса регулирования в замкнутых системах;
2) высокие скорости включения и выключения тока в силовой
цепи ШИП приводят к возникновению радиопомех.
1.2. Силовые схемы ШИП постоянного тока
1.2.1. Силовые схемы нереверсивных ШИП
На рис. 1.2, а) изображена
нереверсивная схема ШИП с тиристорным ключом. Функцию собственно ключа
выполняет тиристор VS1, а тиристор VS2 служит для управления процессом
коммутации VS1. Работает тиристорный коммутатор следующим образом. Пусть
предварительно конденсатор С заряжен через VS2 с положительным
зарядом на верхней обкладке. При подаче управляющего импульса на VS1 на
двигателе М появляется импульс напряжения UП и через VS1 протекает ток
нагрузки. Одновременно по контуру, в который входят конденсатор С,
тиристор VS1, диод VD2 и реактор LК, происходит процесс перезаряда
конденсатора, заканчивающийся через полупериод собственных колебаний контура с
положительным зарядом на нижней обкладке. Диод VD2 запирает
конденсатор от дальнейшей перезарядки. Сигналом на закрывание VS1
является управляющий импульс, подаваемый на VS2. Через открытые
тиристоры VS2 и VS1 разряжается конденсатор и своим током
запирает VS1. После запирания VS1, ток
протекающий через VS2, дозаряжает конденсатор до первоначального
уровня с положительным зарядом на верхней обкладке.
Диод VD2 запирает
конденсатор от дальнейшей перезарядки. Сигналом на закрывание VS1
является управляющий импульс, подаваемый на VS2. Через открытые
тиристоры VS2 и VS1 разряжается конденсатор и своим током
запирает VS1. После запирания VS1, ток
протекающий через VS2, дозаряжает конденсатор до первоначального
уровня с положительным зарядом на верхней обкладке.
Похожие материалы
Информация о работе
Скачать файл
№ 1 Производитель поставки DIN Rail Power Power
-
№ 1
Производитель DIN Rail Power Supplies
> Узнайте больше
-
227
DIN Rail Power Sake > Подробнее
-
IP67
Выпущена полевая система электропитания
> Узнать больше
-
10
Веские причины для выбора PULS
> Узнайте больше
-
95,6%
Еще один мировой рекорд в области эффективности с CP20.
 241
241 > Узнайте больше
-
Застройщики в команде R & D
9>
. больше
Текущая информация:
В заявлении нашей компании — Оценка риска нехватки газа — мы предоставляем информацию о текущей оценке риска в случае возможной нехватки природного газа.
Новости компании
Познакомьтесь с нами
Новости о продуктах
Предыдущий Следующий
Быстрые ссылки
Контактное лицо отдела продаж
Покупайте нашу продукцию
Отмеченная наградами компания
Узнать больше
Приложения
См. примеры
Разработка приложений
Получить техническую поддержку
Новости
Показать все Штаб-квартира PULS в Германии закрыта с 24 декабря по 1 января. Со 2 января мы снова будем доступны для вас в обычном режиме.
Со 2 января мы снова будем доступны для вас в обычном режиме.
Читать далее
Технические паспорта производителей часто содержат только очень общую информацию об эффективности и потерях мощности источников питания. Поэтому имеет смысл…
Читать далее
Высокий пусковой ток переменного тока является проблемой для надежной, эффективной и упрощенной конструкции системы. Поэтому его нужно держать как можно ниже. В этом…
Читать далее
Повышение энергоэффективности необходимо для борьбы с климатическим кризисом. В статье нашего блога мы покажем вам, как эффективные источники питания могут помочь…
Читать далее
Война на Украине нас глубоко потрясла. Наши мысли с мужчинами, женщинами и детьми, которые ежедневно боятся за свою жизнь. PULS хочет помочь этим…
Читать далее
Развитие и инновации являются важными факторами для PULS, обеспечивающими успех компании в долгосрочной перспективе. Сюда входит поддержка инженеров,…
Сюда входит поддержка инженеров,…
Читать далее
ПредыдущийСледующий
Цитаты и ссылки
«Когда вы покупаете продукт PULS, вы покупаете его не только сегодня, но и инвестируете в свое будущее».
Майкл Бэкон, генеральный менеджер Control Logic, Австралия
Цитаты и ссылки
» Это Инженерное Искусство на высшем уровне.»
Магнус Дэвидсон, руководитель маркетинговой группы, OEM Automatic AB, Швеция
Цитаты и ссылки
«Я доверяю PULS, потому что они уже десятилетиями конкурентоспособны. ”
”
Хосе Абад, директор отдела продаж компании Electrónica Olfer, S.L., Испания
Цитаты и ссылки
“ РАЗМЕР, очень фантастическая серия ”
Маурицио Гуарнашелли, отдел внутренних продаж и технической поддержки Piero Bersanini S.p.A, Италия
Цитаты и ссылки
«Я доверяю PULS, потому что это стабильная и надежная компания».
Эверт Гис, генеральный директор Elipse NV, Бельгия
Предыдущий Следующий
Штаб-квартира PULS в Мюнхене
Новый офис благодаря дизайн-мышлению
читать историю
MakerSpace
Блоки питания для мейкеров
читать историю
Formula Student
Блоки питания для гоночных автомобилей
читать историю
Интервью с Бернхардом Эрдлом
Связь? Конечно, но это должно быть просто!
читать историю
Предыдущий Следующий
Больше историй
Места производства
См. наши заводы по производству источников питания
наши заводы по производству источников питания
Читать далее
Наверх
Преобразователи постоянного тока в постоянный с широтно-импульсной модуляцией, 2-е издание
About the Author xxi
Preface xxiii
Nomenclature xxv
1 Introduction 1
1.1 Classification of Power Supplies 1
1.2 Basic Functions of Voltage Regulators 3
1.3 Power Relationships in DC–DC Converters 4
1.4 Передаточные функции постоянного тока преобразователей постоянного тока 5
1.5 Статические характеристики регуляторов напряжения постоянного тока 6
1.6 Динамические характеристики регуляторов напряжения постоянного тока 9
1.7 Линейные регуляторы напряжения 12
1.7.1 Последовательный регулятор напряжения 13
1.7.2 Шунтовой регулятор напряжения 14
1. 8 Топологии ШИМ-преобразователей постоянного тока 16
8 Топологии ШИМ-преобразователей постоянного тока 16
1.9 Взаимосвязь между током, напряжением, энергией18 0 90 0
1,10 Сводка 19
Список литературы 19
Вопросы обзора 20
Проблемы 21
2 Buck PWM DC — DC Converter 22
2,1 Введение 22
2.2 Анализ DC Buck Buck Converter для CCM 22 9000 2
2,2 DC Buck Buck Converter для CCM 22
2.2.1 Описание схемы 22
2.2.2 Допущения 25
2.2.3 Интервал времени: 0
2.2.4. 26
2.2.5 Напряжения устройств для CCM 27
2.2.6 Функция передачи постоянного напряжения для CCM 27
2.2.7 Граница между CCM и DCM 29
2.2.8 Конденсаторы 31
R plepip Преобразователь для CCM 33
2.2.10 Коммутационные потери с выходной емкостью линейного MOSFET 39
2.2.11 Коммутационные потери с нелинейной выходной емкостью MOSFET 40
2.2.12 Потери мощности и КПД понижающего преобразователя для CCM 43
2. 2.13 Функция передачи постоянного напряжения преобразователя с потерями для CCM 48
2.13 Функция передачи постоянного напряжения преобразователя с потерями для CCM 48
2.2.13 MOSFET Gate -Drive Power 48
2.2.15 Драйвер затвора 49
2.2.16 Конструкция понижающего преобразователя для CCM 50
2.3 Анализ постоянного тока понижающего преобразователя PWM для DCM 52
2.3.1 Временной интервал: 0 < 7 ≤
DT 56
2.3.2 Интервал времени: DT
2.3.3. Время: ( D +
2.33. T < t ≤ T 58
2.3.4 Напряжения устройства для DCM 59
2.3.5 Функция передачи постоянного напряжения для DCM 59
2.3.6 Максимальная индуктивность для DCM 62
5 90,7 Мощность и потери Эффективность понижающего преобразователя для DCM 63
2.3.8 Конструкция понижающего преобразователя для DCM 65
2,4 Buck Converter с входным фильтром 68
2,5 Buck Converter с синхронным выпрямлением 68
2,6 Buck Converter с положительным общим рельсом 76
2,7 Квадратичный преобразователь Buck 76
2. 8. Понижающий преобразователь с общим диодом 79
8. Понижающий преобразователь с общим диодом 79
2.8.2 Понижающий преобразователь с общим транзистором с ответвленной индуктивностью 81
2.8.3 Преобразователь Уоткинса-Джонсона 82
2.9 Многофазный понижающий преобразователь 83
2.10 переключаемого индуктора Buck Converter 85
2.11.
3.2 Анализ постоянного тока повышающего ШИМ-преобразователя для CCM 90
3.2.1 Описание схемы 90
3.2.2 Допущения 91
3.2.3 Временной интервал: 0 < t ≤ DT 3
3.2.4 Временной интервал: DT < t ≤ T 94
3.2.5 Функция передачи постоянного напряжения для CCM 94
3.2.6 Граница между CCM и DCM Напряжение Ripple 95
3.200 Повышающий преобразователь для CCM 98
3.2.8 Потери мощности и эффективность повышающего преобразователя для CCM 100
3.2.9 Функция передачи постоянного напряжения повышающего преобразователя с потерями для CCM 102
3.2.10 Конструкция повышающего преобразователя для CCM 103
3. 3 Анализ постоянного тока повышающего преобразователя ШИМ для DCM 107
3 Анализ постоянного тока повышающего преобразователя ШИМ для DCM 107
3.3.1 Time Interval: 0 < t ≤ DT 110
3.3.2 Time Interval: DT < t ≤ ( D + D 1) T 111
3.3. 3 Интервал времени: ( D + D 1) T < t ≤ T 112
3.3.4 Напряжения устройства для DCM 112
4 3.3.9 3 Функция передачи постоянного напряжения 1 для DCM 900 6 Максимальная индуктивность для ДКМ 117
3.3.7 Потери мощности и КПД повышающего преобразователя для ДКМ 117
3.3.8 Конструкция повышающего преобразователя для DCM 120
3.4 Двунаправленный понижающий и повышающий преобразователи 127
3.5 Синхронный повышающий преобразователь 129
3.6 Повышающий преобразователь с отводной индуктивностью 129
1313.6.2 Повышающий преобразователь с отводной индуктивностью и общей нагрузкой 132
3.7 Двойственность 133
3.8 Коррекция коэффициента мощности 134
3. 8.1 Коэффициент мощности 134
8.1 Коэффициент мощности 134
3.8 Бустер0005
3.8.3 Electronic Ballasts for Fluorescent Lamps 141
3.9 Summary 141
References 142
Review Questions 143
Problems 143
4 Buck–Boost PWM DC–DC Converter 145
4.1 Introduction 145
4.2 Анализ постоянного тока повышающе-понижающего ШИМ-преобразователя для CCM 145
4.2.1 Описание схемы 145
4.2.2 Предположения 146
4.2.3 Временной интервал: 0 < t ≤ DT 946 2970005
4.2.4 Интервал времени: DT < t ≤ T 148
4.2.5 Функция передачи постоянного напряжения для CCM 149
4.2.6 Напряжения устройства для CCM 150
CCM и Boundary 4.2.004 1514.2.8 Напряжение пульсаций в повышающе-понижающем преобразователе для CCM 152
4.2.9 Потери мощности и эффективность повышающе-понижающего преобразователя для CCM 155
4.2.10 Передаточная функция постоянного напряжения повышающе-понижающего преобразователя с потерями для CCM 158
4. 2.11 Конструкция повышающе-понижающего преобразователя для CCM 159
2.11 Конструкция повышающе-понижающего преобразователя для CCM 159
4.3 Анализ постоянного тока повышающе-понижающего ШИМ-преобразователя для DCM 162
4.3.1 Временной интервал: 0 < t ≤ DT 165
4.3.2 Временной интервал: 6 7 9 2 9 0 7 DT 9 + D 1) T 166
4.3.3 Временный интервал: ( D + D 1) T
4.3.4. Преобразователь в DCM 167
4.3.5 Функция передачи постоянного напряжения повышающе-понижающего преобразователя для DCM 167
4.3.6 Максимальная индуктивность для DCM 170
4.3.7 Потери мощности и эффективность повышающе-понижающего преобразователя в DCM 172
4.3.8 Конструкция повышающе-понижающего преобразователя для DCM 174
4.4 Двунаправленный повышающе-понижающий преобразователь 180
4.5 Синтез конвертера Buck -Boost 181
4.6 Синтез Boost -Buck (ćuk) преобразователя 183
4.7 Неинвертирующие конвертеры Buck -boost 184
4. 7.1. Каскадный неинвертированный конвертер Buck -boost 184
7.1. Каскадный неинвертированный конвертер Buck -boost 184
4.7.12. Четырехтранзисторные неинвертирующие понижающе-повышающие преобразователи 184
4.8 Понижающе-повышающий преобразователь с отводной индуктивностью 186
4.8.1 Понижающе-повышающий преобразователь с общим диодом с отводной индуктивностью 186
4.8.2 Понижающе-повышающий преобразователь с отводной индуктивностью на общем транзисторе 187
4-8.3 Индуктор общей нагрузки Buck-Boost Converter 188
4.8.4. –Преобразователь постоянного тока 195
5.1 Введение 195
5.2 Трансформеры 196
5.3 Анализ DC Конвертера FLACK Flayback для CCM 197
5.3.1 Вывод PWM -конвертер Flyback 197
5.3.2
5.3.4 Временной интервал: 0 < t ≤ DT 200
5.3.5 Временной интервал: DT < t ≤ T 201 DC Функция 6 Передача 3 CM
5
05
5.3.7 Граница между CCM и DCM 204
5.3.8 Напряжение пульсаций в обратноходовом преобразователе для CCM 205
5. 3.9 Потери мощности и КПД обратноходового преобразователя для CCM 207
5.3.10 Функция передачи постоянного напряжения с потерями Преобразователь для CCM 210
5.3.11 Конструкция конвертера Flyback для CCM 211
5.4 Анализ DC PWM Flyback Converter для DCM 214
5.4.1 Время интервал времени: 0
5.44. 2 Временной интервал: DT
5.4.3. 5.4.4 Функция передачи постоянного напряжения для DCM 221
5.4.5 Максимальная индуктивность намагничивания для DCM 222
5.4.6 Напряжение пульсаций в обратноходовом преобразователе для DCM 225
5.4.7 Потери мощности и КПД обратноходового преобразователя для DCM 226
5.4.8 Конструкция обратноходового преобразователя для DCM 228
5.5 Трансформатор с несколькими выходами 232
5.6 ДИВКЕТАЛЬНЫЙ ПЕРЕВОД ПЕРЕВОД 237
5.7 с активной фиксацией 241
5.11 Двухтранзисторный обратноходовой преобразователь 241
5. 12 Резюме 243
Ссылки 244
Вопросы для повторения 244
Проблемы 245
6 Передний парионный конвертер DC -DC 246
6.1 Введение 246
6.2 Анализ DC Pwm Bordge Converter для CCM 246
6.2.1 Вывод прямого конвертера PWM 246
64.2.2.2.12.1. Интервал: 0
6.2.3. ≤ T 253
6.2.5 Максимальный рабочий цикл 253
6.2.6 Устройства напряжения 254
6.2.7. Функция передачи напряжения DC для CCM 255
6.2.8 Граница между CCM и DCM 255
6.2.9 Ripple Напряжение в прямом преобразователе для CCM 256
6.2.10 Потери мощности и эффективность прямого преобразователя для CCM 258
6.2.11 Функция передачи постоянного напряжения преобразователя с потерями для CCM 261
6.2.12 Конструкция прямого преобразователя для CCM 262
6.3 DC Анализ форвартора ШИМ для DCM 269
6.3.1 Интервал времени: 0
6. 3.2. 272
3.2. 272
6.3.3 Интервал времени: DT + TM
6.3.4 Время. ) T < t ≤ T 273
6.3.5 Функция передачи постоянного напряжения для DCM 274
6.3.6 Максимальная индуктивность для DCM 277
6.3.7 Потери мощности и эффективность прямого преобразователя для DCM 278
6.3.8 Конструкция прямого преобразователя для DCM 280
6.4 Прямой преобразователь с несколькими выходами 0458 6009 9009 Преобразователь с синхронным выпрямителем 288
6.6 Прямоходовые преобразователи с активной фиксацией 288
6.7 Прямоходовой преобразователь с двумя ключами 290
6.8 Прямоходовой преобразователь 291
6.9 Резюме 292
0004 Список литературы 293Вопросы обзора 293
Проблемы 294
7 Получистого тихоокета DC-DC Converter 296
7.1 Введение 296
7.2 Анализ DC Half-Converter для CCM 296
7.7.1. Описание схемы 296
7. 2.2 Допущения 299
7.2.3. 7.2.5 Временной интервал: T ∕ 2
7.2.6. Напряжения 304
7.2.8 Функция передачи постоянного напряжения полумостового преобразователя без потерь для CCM 304
7.2.9 Граница между CCM и DCM 305
7.2.10 Напряжение пульсаций в полумостовом преобразователе для CCM 306
9.2004 7.2.10 11 Потери мощности и эффективность полумостового преобразователя для CCM 3087.2.12 Передаточная функция постоянного напряжения преобразователя с потерями для CCM 311
7.2.13 Конструкция полумостового преобразователя для CCM 312
7.3 Анализ постоянного тока полумостового преобразователя PWM для DCM 315
7.3.1 Временной интервал : 0
7.3.2. + D 1) T < t ≤ T ∕ 2 322
7.3.4 Функция передачи напряжения DC для DCM 322
7.3.5 Максимальная индуктивность для DCM 326
7,4 Сумма 326
СПИСОК 327
ОБЗОР. Полномостовой ШИМ преобразователь постоянного тока в постоянный 330
Полномостовой ШИМ преобразователь постоянного тока в постоянный 330
8.1 Введение 330
8.2 Анализ постоянного тока полномостового ШИМ преобразователя для CCM 330
8.2.1 Описание схемы 330
8.2.2 Допущения 3032
8.2.3 Интервал времени: 0
8.2.4 Интервал времени: DT
8.2.5 Время: T ∕ 2977 ∕ 2977 < t ≤ T ∕2 + DT 336
8.2.6 Time Interval: T ∕2 + DT < t ≤ T 336
8.2.7 Device Stresses 337
8.2 .8 Функция передачи постоянного напряжения двухполупериодного преобразователя без потерь для CCM 337
8.2.9 Граница между CCM и DCM 338
8.2.10 Напряжение пульсаций в мостовом преобразователе для CCM 339
8.2.11 Потери мощности и КПД мостового преобразователя для CCM 340
8.2.12 Напряжение постоянного тока Передаточная функция преобразователя с потерями для CCM 344
8. 2.13 Проектирование мостового преобразователя для CCM 345
8.3 Анализ постоянного тока полномостового преобразователя ШИМ для DCM 351
8.3.1 Временной интервал: 0 < t ≤ ДТ 351
8.3.2 Интервал времени: DT
8.3.3. ≤ T ∕ 2 355
8.3.4 Функция переноса напряжения DC для DCM 356
8.3.5 Максимальная индуктивность для DCM 359
8.4.
Контрольные вопросы 362
Проблемы 363
9 Модели с небольшим сигналом преобразователей PWM для CCM и DCM 365
9.1 Введение 365
9.2 Предложения 366
9,3 Средняя 369
9.5 Сокращение модели 375
9.6 Усредненная модель большого сигнала для CCM 377
9.7 Линейные модели цепи постоянного тока и слабого сигнала коммутационной сети для CCM 381
9.7.1 Модель цепи коммутации большого сигнала для CCM 381
9.7.2 Линеаризация модели сети коммутации для CCM 384
9. 8 Блок-схема модели слабосигнальной модели ШИМ-преобразователей постоянного тока 385
8 Блок-схема модели слабосигнальной модели ШИМ-преобразователей постоянного тока 385
9.9 Семейство преобразователей ШИМ Модели для CCM 386
9.10 Модель малосигнального ШИМ-переключателя для CCM 389
9.11 Моделирование идеальной сети коммутации для DCM 391
9.11.1 Взаимосвязи между компонентами постоянного тока для модели DCM 391
9.11.2 Коммутация сети для DCM 395
9.12 Averaged Parasitic Resistances for DCM 398
9.13 Summary 400
References 402
Review Questions 405
Problems 405
10 Small-Signal Characteristics of Buck Converter for CCM 407
10.1 Introduction 407
10.2 Модель малосигнального ШИМ-понижающего преобразователя 407
10.3 Передаточные функции без обратной связи 408
10.3.1 Передаточная функция управления без обратной связи 409
10.3.2 Задержка в передаточной функции управления-выхода 416
10.3.3 Передаточная функция ввода-вывода без обратной связи 418
10. 3.4 Входное сопротивление без обратной связи 420
3.4 Входное сопротивление без обратной связи 420
10.3.5 Выходная функция без обратной связи Полное сопротивление 423
10.4 Реакция на скачки без обратной связи 426
10.4.1 Реакция без обратной связи выходного напряжения на скачкообразное изменение входного напряжения 426
10.4.2 Реакция без обратной связи выходного напряжения на скачкообразное изменение рабочего цикла 431
10.4.3 Реакция выходного напряжения без обратной связи на скачкообразное изменение тока нагрузки 433
10.5 Трансферные функции DC с открытой петлей 434
10,6 Сводка 436
Список литературы 436
Вопросы обзора 437
Проблемы 438
. 11.2 Характеристики постоянного тока 439
11.3 Функция передачи управления на выход без обратной связи 440
11.4 Задержка в функции передачи управления на выход без обратной связи 449
11.5 Восприимчивость к звуку без обратной связи 451
11.6 Входной импеданс без обратной связи 455
11. 7 Выходной импеданс без обратной связи 457
7 Выходной импеданс без обратной связи 457
11.8 Реакции на скачки без обратной связи 461
2 Реакция выходного напряжения без обратной связи на скачкообразное изменение рабочего цикла 464
11.8.3 Реакция выходного напряжения без обратной связи на скачкообразное изменение тока нагрузки 465
11.9 Резюме 467
Ссылки 467
Контрольные вопросы 468
Проблемы 468
12 Управление режимом напряжения для преобразователя PWM Buck 470
12.1 Введение 470
12.2 Свойства отрицательной обратной связи 471
12.3 Стабильность 474
12.4 Контроль одноцелевого управления PWM. 12.5 Модель малосигнального понижающего преобразователя с обратной связью 478
12.6 Широтно-импульсный модулятор 478
12.7 Цепь обратной связи 483
12.8 Передаточная функция понижающего преобразователя с модулятором и цепью обратной связи 486
12,9 управления цепя 489
12.9.1 Усилитель ошибки 489
12. 9.2 Пропорциональный контроллер 490
9.2 Пропорциональный контроллер 490
12.9.3 Интегральный контроллер 492
12.9.4 Контроллер 497
12.9.6 Коэффициент усиления контура 504
12.9.7 Замкнутая функция передачи управляющего напряжения на выход 504
12.9.8 Замкнутая функция передачи вход-выход 506
12.9.9 Замкнутый- Входное сопротивление контура 508
12.9.10 Выходное сопротивление замкнутого контура 509
12.10 Реакция замкнутого контура на скачки 511
12.10.1 Реакция на скачкообразное изменение входного напряжения 511
12.10.2 Реакция на скачкообразное изменение опорного напряжения 90 013 013 3 Реакция замкнутого контура на скачкообразное изменение тока нагрузки 515
12.10.4 Передаточные функции постоянного тока с замкнутым контуром 515
12.11 Резюме 518
Ссылки 519
Обзорные вопросы 519
90 Проблемы0004 13 Управление повышающим преобразователем по напряжению 521
13.1 Введение 521
13. 2 Схема повышающего преобразователя с управлением по напряжению 521
2 Схема повышающего преобразователя с управлением по напряжению 521
13.3 Передаточная функция модулятора, силового каскада повышающего преобразователя и цепи обратной связи 523 19004 Интегральный двухвыводной контроллер 527
13.5 Конструкция интегрального двухвыводного контроллера 532
13.6 Коэффициент усиления контура 536
13.7 Функция передачи управления по замкнутому контуру на выходное напряжение 537
13,8 Сторонняя восприимчивость к аудиозаписи 539
13.9 Входной импеданс с замкнутым циклом 539
13.10 Выходной импеданс с замкнутым контуром 542
13.11. Напряжение 544
13.11.2 Реакция замкнутого контура на скачкообразное изменение опорного напряжения 547
13.11.3 Реакция замкнутого контура на скачкообразное изменение тока нагрузки 548
13.12 Передаточные функции постоянного тока с замкнутым контуром 549
13.13 Сводка 552
Список литературы 552
Вопросы обзора 552
Проблемы 553
14 Контроль текущего режима 554
14. 1 Введение 554
1 Введение 554
14.2 Принцип Организации PWM Converters с конвертацией PWM с PAIK CMC 5555544.2 Между рабочим циклом и наклоном тока дросселя 559
14.4 Нестабильность замкнутого контура тока 560
14.5 Компенсация наклона 564
14.5.1 Анализ компенсации наклона во временной области 564
14.5.2 Граница компенсации наклона для понижающих и повышающе-понижающих преобразователей 569
14.5.3 Граничная компенсация наклона для повышающего преобразователя 570
14.6 Эффект Sample-and-Hold на естественном контуре тока 570
14.6. Ток дросселя на небольшое возмущение в замкнутом контуре тока 572
14.6.2 Принудительная реакция тока дросселя на ступенчатое изменение управляющего напряжения в замкнутом контуре тока 575
14.6.3 Связь между s -Domain и z -Domain 577
14.6.4 Передаточная функция замкнутого контура тока в z -Domain 578
14.7 Функция передачи тока в замкнутом контуре от напряжения к дросселю в s 190 080 580 . 1 Аппроксимация H icl с помощью рациональной передаточной функции 582
1 Аппроксимация H icl с помощью рациональной передаточной функции 582
14.7.2 Переходные характеристики замкнутого внутреннего контура 588
-domain 588
14.8.2 Увеличение контура внутренней петли в S -Domain 590
14,9 Частота скрещивания усиливания внутренней петли 595
14,10 Фазовый запас внутренней петли 596
14.11. Компенсация наклона 598
14.12 Максимальный рабочий цикл для преобразователей с компенсацией наклона 600
14.13 Минимальная компенсация наклона для понижающего и повышающе-понижающего преобразователей 605
14.14 Минимальная компенсация наклона для повышающего преобразователя 607
14.15 Ошибка Функция преобразования напряжения в рабочий цикл 610
14.16 Управление с обратной связью Функция преобразования напряжения в рабочий цикл токового контура 614
14.17 Альтернативное представление токового контура
14.18.1 Модифицированная аппроксимация контура тока 619
14. 19 Контур напряжения ШИМ-преобразователей с управлением по току 624
19 Контур напряжения ШИМ-преобразователей с управлением по току 624
14.19.1 Передаточная функция управления-выход для понижающего преобразователя 624
14.19.2 Блок-схема силовых каскадов ШИМ-преобразователей 627
14.19.3 Передаточная функция замкнутого контура по напряжению преобразователей ШИМ с управлением по току 628
Управление режимом 628
14.19.5 Выходной импеданс ШИМ-преобразователей с обратной связью с управлением по току 630
14.20 Коэффициенты прямой связи в преобразователях ШИМ с управлением по току без компенсации наклона 631
14.21 Коэффициенты прямой связи в преобразователях ШИМ с управлением по току Управление режимами и компенсация наклона 634
14.22 Функция преобразования управляющего напряжения в выходное напряжение внутреннего контура с коэффициентами прямой связи 636
14.23 Восприимчивость к звуку внутреннего контура с коэффициентами прямой связи 637
14.24 Передаточные функции замкнутого контура с коэффициентами прямой компенсации 638 a Кривая линейного изменения тока индуктора 638
14. 26 Взаимосвязи для управления временем включения в режиме постоянной частоты тока 639
26 Взаимосвязи для управления временем включения в режиме постоянной частоты тока 639
14.27 Резюме 639
Ссылки 640
Вопросы обзора 644
Проблемы 644
14.28 Приложение: моделирование с образцом и удержанием 645
14.28.1 Пробоорезок контрольного напряжения 645
14,28,2 Золота Зора E STS 650
15 Контроль токо-режима для преобразователя Boost 653
15.1 Введение 653
15.2. -Функция передачи тока индуктора 653
15.2.2 Функция передачи тока от катушки индуктивности к рабочему циклу без обратной связи 659
15.2.3 Функция передачи тока от входного напряжения к катушке индуктивности без обратной связи 660
15.2.4 Функция передачи тока от катушки индуктивности к разомкнутому контуру -Функция передачи выходного тока 665
15.3 Реакция тока дросселя без обратной связи на скачок 667
15.3.1 Реакция тока дросселя без обратной связи на скачкообразное изменение входного напряжения 667
15. 3.2 Реакция тока дросселя без обратной связи к ступенчатому изменению рабочего цикла 670
3.2 Реакция тока дросселя без обратной связи к ступенчатому изменению рабочего цикла 670
15.3.3 Реакция тока катушки индуктивности без обратной связи на ступенчатое изменение тока нагрузки 672
15.4 Передаточные функции замкнутой цепи тока 675
15.4.1 Прямое усиление 675
15.5 2 Коэффициент усиления петли 65 07 90
15.4.3 Коэффициент усиления токовой петли с обратной связью 675
15.4.4 Функция преобразования управления в выход 677
15.4.5 Функция преобразования входного напряжения в рабочий цикл 684
15.4.6 Ток нагрузки в Передаточная функция рабочего цикла 688
15.4.7 Выходное сопротивление замкнутого контура тока 690
15.5 Передаточные функции замкнутого контура 695
15.5.1 Передаточная функция управления-выход 695
15.5.2 Передаточная функция управляющего напряжения в напряжение обратной связи 695
15.5.3 Коэффициент усиления контура по напряжению 697
15.5.4 Коэффициент усиления контура по напряжению с замкнутым контуром 701
15. 5.5 Восприимчивость к аудиосигналу с замкнутым контуром со встроенным контроллером 703
5.5 Восприимчивость к аудиосигналу с замкнутым контуром со встроенным контроллером 703
15.5.6 Выходное сопротивление Замкнутый с Loop Встроенный контроллер 704
15.6 Реакция замкнутого контура на скачки 706
15.6.1 Реакция замкнутого контура выходного напряжения на скачкообразное изменение входного напряжения 706
15.6.2 Реакция замкнутого контура выходного напряжения на скачкообразное изменение тока нагрузки 708
15.6 .3 Реакция выходного напряжения в замкнутом контуре на скачкообразное изменение опорного напряжения 708
15.7 Передаточные функции постоянного тока в замкнутом контуре 710
15.8 Резюме 711
Ссылки 711
Контрольные вопросы 712
700124 9 Проблемы000516 Характеристики слабого сигнала разомкнутого повышающего преобразователя ШИМ для DCM 713
16.1 Введение 713
16.2 Модель малосигнального повышающего преобразователя для DCM 713
716
16.4 Функция передачи входного/выходного напряжения без обратной связи 719
16. 5 Входное сопротивление без обратной связи 724
5 Входное сопротивление без обратной связи 724
16.6 Выходное полное сопротивление без обратной связи 725
16.7 Переходная характеристика выходного напряжения преобразователя Boost2er 7 для 9DCM0005
16.7.1 Реакция выходного напряжения на ступенчатое изменение входного напряжения 728
16.7.2 Реакция выходного напряжения на ступенчатое изменение рабочего цикла 730
16.7.3 Реакция выходного напряжения на ступенчатое изменение тока нагрузки 730
16.8 Функция передачи тока от рабочего цикла к дросселю без обратной связи 731
16.9 Функция передачи тока от входного напряжения к дросселю без обратной связи 735
16.10 Функция передачи выходного тока к дросселю без обратной связи 735
16.11 Переходная характеристика тока дросселя повышающего преобразователя для DCM 738
16.11.1 Переходная характеристика тока дросселя при скачкообразном изменении входного напряжения 738
16.11.2 Переходная характеристика тока дросселя при скачкообразном изменении рабочего цикла 740
16. 11 .3 Ступенчатая реакция тока дросселя на скачкообразное изменение тока нагрузки 741
11 .3 Ступенчатая реакция тока дросселя на скачкообразное изменение тока нагрузки 741
16.12 Характеристики постоянного тока повышающего преобразователя для DCM 742
16.12.1 Функция преобразования постоянного напряжения в постоянный повышающий преобразователь без потерь для DCM 742
16.12.2 DC-DC-DC Переносная функция переноса напряжения для преобразователя BOOST Loscy для DCM 743
16.12.3 Эффективность конвертера усиления для DCM 745
16.13 РЕЗЮМЕ 745
СПИСОК 745
. Обзорные Вопросы 746
9. 7464 745
. Обзор 746
64464 7
17 Силовые диоды на основе кремния и карбида кремния 747
17.1 Введение 747
17.2 Электронные силовые переключатели 747
17.3 Atom 748
Electron 17.3 Эффективная масса и масса 49004 9000
17.5 Semiconductors 750
17.6 Intrinsic Semiconductors 751
17.7 Extrinsic Semiconductors 756
17.7.1 n-Type Semiconductor 756
17. 7.2 p-Type Semiconductor 759
7.2 p-Type Semiconductor 759
17.7.3 Maximum Operating Temperature 761
17.8 Wide Полупроводники с запрещенной зоной 762
17.9 Физическая структура переходных диодов 764
17.9.1 Формирование обедненного слоя 765
17.9.2 Перенос заряда 767
17.10 Статический I — V Характеристика диода 768
17.11 Напряжение разбивки диодов соединений 772
17.11.1. 17.11.4 Пробивное напряжение 781
17.11.5 Краевые выводы 782
17.12 Емкости переходных диодов 784
17.12.1 Емкость перехода 784
000517.13 Обратное восстановление диодов PN-соединения 789
17.13.1 Качественное описание 789
17.13.2 Обратное восстановление в резистивных цепях 790
17.13.3 Уравнение заряда 796
17.13.4.
17.14 Schottky Diodes 798
17.14.1 Статический I — V Характеристика Schottky Diodes 801
17.14.2.0005
17.14.4. Характеристики переключения диодов Шоттки 802
17. 15 Солнечные элементы 806
15 Солнечные элементы 806
17.16 Световые диоды 809
17.17 Спиц модель диодов 810
17.18 Сумма 811
9000 9000 СПИСОК 81517.18
000 9000 9000 416417.18
000 9000 9000 41517.18
119 9000 9000 9000. 81718 Силовые кремниевые и карбидно-кремниевые МОП-транзисторы 819
18.1 Введение 819
18.2 Интегрированные МОП-транзисторы 819
18.3 Физическая структура силовых МОП-транзисторов 81
18.4 Диод 825
18,5 Вывод характеристик мощного мосфета 826
18.5.1 Омическая область 826
18.5.2 Область 829
18.5.3 Модуляция длины канала 830
18,6 Power MOSFET Характеристики 831
18.7 Подвижность носителей заряда 833
18.7.1 Влияние концентрации легирующей примеси на подвижность 834
18.7.2 Влияние температуры на подвижность 836
18.7.3 Влияние электрического поля на подвижность 850 9008 846
18.8.1 Омическая область 846
18. 8.2 Область сжимания 847
8.2 Область сжимания 847
18.9 Сторонние соотношения мощных мосфетов 848
18.10 Напряжение расщепления мощности. 850
18.11.0005
18.12 Специфическая на резистентности 852
18.13 Рисунок полупроводников 855
18.14 На резистентности к мощным MOSFET 857
18,14.1 Сопротивление канала 857
18.14.2 Регистрирование Регистрационность 857
444444444444444444444444444444444444444444444444444444444444444444.100044444444.100044444.10004444.10004444.10004444.10004444.1000444.1000444.1000444.16444.1000444.1000444.1000444.1000444.100044. 3 Сопротивление области шеи 858
18.14.4 Сопротивление области дрейфа 859
18.15 Емкости мощных МОП-транзисторов 862
18.15.1 Емкость затвор-исток 862
2 Drain-to-ac-it.0005
18.15.3 Gate-to-Drain Capacitance 864
18.16 Switching Waveforms 875
18.17 SPICE Model of Power MOSFETs 877
18.18 IGBTs 879
18.19 Heat Sinks 880
18.20 Summary 886
References 888
Review Вопросы 888
Проблемы 889
19 Электромагнитная совместимость 891
19.