Что такое масштабные преобразователи в электроизмерительной технике. Каковы основные виды масштабных преобразователей. Как работают шунты и делители напряжения. Для чего применяются измерительные трансформаторы тока и напряжения. Какие преимущества дает использование масштабных преобразователей.
Общие сведения о масштабных преобразователях
Масштабные преобразователи — это измерительные устройства, предназначенные для изменения размера измеряемой величины в заданное число раз. Они позволяют расширить пределы измерений приборов и обеспечить безопасность измерений в цепях высокого напряжения.
К основным видам масштабных преобразователей относятся:
- Шунты
- Делители напряжения
- Добавочные резисторы
- Измерительные усилители
- Измерительные трансформаторы тока и напряжения
Рассмотрим подробнее принцип действия и особенности применения каждого вида масштабных преобразователей.
Шунты: назначение и принцип действия
Шунты применяются для уменьшения силы тока в измерительной цепи в определенное число раз. Они представляют собой резистор, включаемый параллельно измерительному прибору.

Сопротивление шунта рассчитывается по формуле:
Rш = R / (n — 1)
где R — сопротивление измерительного прибора, n — коэффициент шунтирования.
При этом ток через прибор уменьшается в n раз по сравнению с измеряемым током.
Основные характеристики шунтов:
- Изготавливаются из манганина
- Бывают встроенными (до 30 А) и наружными (до 7500 А)
- Классы точности от 0,02 до 0,5
- Применяются в основном в цепях постоянного тока с магнитоэлектрическими приборами
Шунты позволяют существенно расширить пределы измерения тока амперметрами без изменения их конструкции.
Делители напряжения: принцип работы и виды
Делители напряжения применяются для уменьшения измеряемого напряжения в заданное число раз. По принципу действия они делятся на:
- Резистивные (на активных сопротивлениях)
- Емкостные (на конденсаторах)
- Индуктивные (на катушках индуктивности)
Наиболее распространены резистивные делители напряжения. Коэффициент деления определяется соотношением сопротивлений плеч делителя.
Особенности применения делителей напряжения:
- Позволяют расширить пределы измерения вольтметров
- Серийно выпускаются для компенсаторов постоянного тока
- Имеют нормированные коэффициенты деления
- Классы точности от 0,0005 до 0,01
Делители напряжения дают возможность измерять высокие напряжения с помощью приборов на небольшие номинальные напряжения.

Добавочные резисторы: расчет и применение
Добавочные резисторы включаются последовательно с вольтметром для увеличения верхнего предела измерения напряжения.
Сопротивление добавочного резистора рассчитывается по формуле:
Rдоб = RV * (Ux/UV — 1)
где RV — сопротивление вольтметра, Ux — измеряемое напряжение, UV — номинальное напряжение вольтметра.
Основные характеристики добавочных резисторов:
- Изготавливаются из манганина
- Применяются в цепях постоянного и переменного тока до 20 кГц
- Рассчитаны на напряжения до 30 кВ
- Классы точности от 0,01 до 1
- Номинальные токи от 0,5 до 30 мА
Добавочные резисторы позволяют существенно расширить диапазон измерения напряжения вольтметрами.
Измерительные усилители: назначение и виды
Измерительные усилители применяются для усиления слабых сигналов и расширения пределов измерения в сторону малых значений тока и напряжения.
Основные виды измерительных усилителей:
- Усилители постоянного тока
- Низкочастотные усилители (20 Гц — 200 кГц)
- Высокочастотные усилители (до 250 МГц)
- Селективные усилители
Измерительные усилители позволяют измерять сигналы от 0,1 мВ и 0,3 мкА с погрешностью 0,1-1%.

Для усиления сверхмалых сигналов применяются:
- Фотогальванометрические усилители
- Электрометрические усилители с входным сопротивлением до 10^14 Ом
Измерительные усилители существенно расширяют возможности измерительных приборов в области малых сигналов.
Измерительные трансформаторы тока: устройство и применение
Измерительные трансформаторы тока применяются для преобразования больших переменных токов в относительно малые, допустимые для измерения стандартными приборами.
Особенности конструкции и работы трансформаторов тока:
- Состоят из двух обмоток на ферромагнитном сердечнике
- Первичный ток больше вторичного
- Число витков первичной обмотки меньше вторичной
- При больших токах первичная обмотка может иметь 1 виток
- Стандартный вторичный ток 5 А
Трансформаторы тока позволяют безопасно измерять большие токи с помощью стандартных амперметров.
Измерительные трансформаторы напряжения: принцип действия и применение
Измерительные трансформаторы напряжения используются для преобразования высоких напряжений в относительно низкие, удобные для измерения.
Основные особенности трансформаторов напряжения:
- Первичное напряжение больше вторичного
- Число витков первичной обмотки больше вторичной
- Стандартное вторичное напряжение 100 В или 100/√3 В
- Обеспечивают гальваническую развязку цепей
Трансформаторы напряжения позволяют безопасно измерять высокие напряжения с помощью стандартных вольтметров.
Преимущества использования масштабных преобразователей
Применение масштабных преобразователей в измерительной технике дает следующие преимущества:
- Расширение пределов измерения стандартных приборов
- Повышение безопасности измерений в высоковольтных цепях
- Унификация измерительных приборов
- Возможность дистанционных измерений
- Повышение чувствительности измерений
Это делает масштабные преобразователи важным элементом современных электроизмерительных систем и комплексов.
Области применения масштабных преобразователей
Масштабные преобразователи находят широкое применение в различных областях измерительной техники:
- Электроэнергетика — для измерения больших токов и высоких напряжений
- Радиоэлектроника — для расширения пределов измерения осциллографов, вольтметров, амперметров
- Метрология — в составе образцовых средств измерений
- Автоматика — в измерительных преобразователях систем управления
- Телекоммуникации — для согласования уровней сигналов
Масштабные преобразователи являются неотъемлемой частью большинства современных измерительных приборов и систем.

Перспективы развития масштабных преобразователей
Основные направления совершенствования масштабных преобразователей:
- Повышение точности преобразования
- Расширение частотного и динамического диапазонов
- Миниатюризация конструкций
- Создание интеллектуальных преобразователей с цифровым выходом
- Разработка преобразователей для экстремальных условий эксплуатации
Развитие масштабных преобразователей идет в направлении повышения их метрологических характеристик и расширения функциональных возможностей.
3.1.3. Масштабные преобразователи
Различают два вида масштабных преобразователей:
1. Пассивные масштабные преобразователи, работающие за счёт энергии объекта исследований.
К этой группе относятся шунты, резистивные, ёмкостные и индуктивные делители тока и напряжения, измерительные трансформаторы.
Пассивные масштабные преобразователи строятся на пассивных элементах: резисторах, конденсаторах, катушках индуктивности.
Характерным для них является то, что мощность выходного сигнала всегда меньше мощности входного.
2. Активные масштабные преобразователи. Позволяют не только изменить размер величины, но и увеличить мощность выходного сигнала
К ним относятся измерительные усилители, повышающие уровни и работающие за счёт дополнительного источника энергии
Пассивные масштабные преобразователи
Шунты. Чтобы в измерительный механизм прибора
поступал ток Iим,
меньший в n раз измеряемого тока I,
необходимо использование шунта
— сопротивления,
подключаемого параллельно
цепи измерительного механизма.
Чтобы в измерительный механизм прибора
поступал ток Iим,
меньший в n раз измеряемого тока I,
необходимо использование шунта
— сопротивления,
подключаемого параллельно
цепи измерительного механизма.
Iим
U
I
R
Значение сопротивления шунта R определяется из соотношения
R = Rим/(n-1),
где Rим — сопротивление измерительного механизма,
n = I/Iим — коэффициент шунтирования.
Шунты изготавливают из
На небольшие токи (до 30 А) шунты помещаются в корпусе прибора (внутренние шунты).
На большие токи (до 7500 А) применяются наружные шунты.
По
точности шунты разделяются на следующие
классы:
0,02; 0,05; 0,1; 0,2; 0,5.
Добавочные резисторы. Служат для расширения пределов измерения измерительных механизмов по напряжению и включаются последовательно с ними.
Uд
Uим
R
U
Если напряжение постоянного тока, необходимое для полного отклонения подвижной части измерительного механизма, равно Uим, а измеряемое напряжение U = nUим, то добавочное сопротивление
R = Rим(n-1).
Добавочные резисторы изготавливаются из манганина.
Применяются для преобразования напряжений до 30 кВ постоянного и переменного токов частотой от 10 Гц до 20 кГц и имеют следующие классы точности: 0,01; 0,02; 0,05; 0,1; 0,2; 0,5; 1,0.
Измерительные трансформаторы тока.
Преобразуют
переменный ток от 0,8 А до 40000 А в ток с
предельными значениями 1; 2; 2,5; 5 А.
Поэтому в трансформаторах тока первичный ток I1 обычно больше вторичного I2.
Zнагр
U
A
B
E
I1
W1
W2
L
N
C
D
I2
U2
Первичная обмотка трансформатора тока содержит малое число витков, и её выводы АВ включают в разрыв проводника с измеряемым током.
Число
витков вторичной
обмотки больше,
чем первичной. К её выводам CD последовательно
подключают амперметры, ваттметры и др.
приборы.
К её выводам CD последовательно
подключают амперметры, ваттметры и др.
приборы.
Вторичные цепи измерительного трансформатора напряжения
рассчитаны на напряжение 100 В, а лабораторных 100/√3 В при первичном номинальном напряжении до 750/√3 В.Выводы EF первичной обмотки высшего напряжения включают в исследуемую цепь параллельно. Во вторичную цепь LN с меньшим числом витков (W1>W2) параллельно подключают вольтметры, ваттметры и т.д.
По показаниям приборов, включённых во вторичные обмотки, можно определить значения измеряемых величин. Для этого их показания нужно умножить на действительные коэффициенты трансформации kI = I1/I2, kU = U1/U2.
Но
действительные коэффициенты трансформации
не известны,
т.к. они зависят от режима
работы трансформатора.
Поэтому
вместо действительных коэффициентов
трансформации используют
kUном = U1ном/U2ном = W1/W2;
kIном = I1ном/I2ном = W2/W1.
Относительные погрешности δI и δU из-за неравенства действительных и номинальных коэффициентов трансформации определяются следующими выражениями:
δI = (kIном — kI)/ kI ·100 %,
δU = (kUном — kU)/ kU ·100 %.
По точности трансформаторы тока подразделяются на следующие классы:
0,01; 0,02; 0,05; 0,1; 0,2; 0,5; 1; 3; 5; 10.
В
зависимости от области применения
измерительные трансформаторы тока
изготавливаются стационарными
и
переносными.
Стационарные трансформаторы напряжения имеют классы точности 0,2; 0,5; 1; 3, а лабораторные — 0,05; 0,1; 0,2.
Измерительные трансформаторы позволяют наряду с изменением размера величины осуществлять гальваническое разделение цепей.
Активные масштабные преобразователи.
Измерительные усилители используются для усиления сигналов постоянного и переменного токов.
Связь между входным и выходным сигналами в усилителе непрерывная и однозначная.
Усилители выполняются с нормированной погрешностью коэффициента передачи и позволяют измерять сигналы от 0,1 мВ и 0,3 мкА с погрешностью 0,1 … 1%.
Классификация усилителей возможна по ряду признаков:
— по полосе пропускания частот,
— по роду усиливаемого электрического сигнала,
— по типу применяемых усилительных элементов,
— по числу каскадов
усиления и т. д.
д.
Усилители переменного тока.
По ширине полосы и абсолютным значениям частот усиливаемых сигналов электронные усилители переменного тока делятся на:
— усилители низкой частоты (УНЧ), предназначенные для усиления сигналов с частотой от десятков Гц до 15-20 кГц;
— усилители высокой частоты (УВЧ), предназначенные для усиления сигналов во всём диапазоне частот, используемых электроникой;
— широкополосные усилители, позволяющие усиливать сигналы в широкой полосе частот (например, от десятков Гц до нескольких МГц).
Импульсные усилители представляют собой широкополосные усилители, полосу пропускания которых выбирают так, чтобы искажение формы усиливаемого импульса было наименьшим.
Форма импульса определяет его спектр.
Чем
круче
фронт импульса,
тем шире
его спектр в области верхних частот;
чем длительнее
пологие участки импульса, тем больше
низкочастотных составляющих в спектре.
В структуре усилителя могут быть цепи, осуществляющие передачу части энергии с его выхода во входную цепь или передачу энергии с выхода последующих каскадов во входные цепи предыдущих и называемые цепями обратной связи.
Количественно обратная связь оценивается коэффициентом передачи цепи обратной связи β, показывающим, какая часть выходного сигнала поступает на вход схемы.
В зависимости от соотношения фаз напряжения, поступающего по цепи обратной связи Uβ, и входного напряжения Uвх, различают положительную и отрицательную обратные связи.
В усилителях используется отрицательная обратная связь (ООС), позволяющая повысить точность измерительных усилителей.
Усилители постоянного тока (УПТ).
Это
усилители, способные усиливать медленно
меняющиеся во времени сигналы.
Низшая рабочая частота таких усилителей fниз = 0, высшая fвыс определяется назначением усилителя.
Усилители постоянного тока применяются для усиления как медленно меняющихся сигналов, так и слабых сигналов переменного тока (например, для усиления сигналов с датчиков (термопар, фотодатчиков, тензодатчиков и др.), в осциллографах и т.д.).
Для соединения каскадов используется непосредственная связь. Отсутствие в межкаскадных связях реактивных элементов позволяет передавать постоянную и переменную составляющие сигнала.
Из-за этого УПТ свойственно такое явление, как дрейф нуля.
Под дрейфом нуля понимают самопроизвольное изменение выходного напряжения при постоянном или нулевом сигнале на входе.
Дрейф
нуля обычно
оценивают изменением за единицу времени
входного
напряжения Uвх. др.,
которое вызывает эквивалентное изменение
выходного
напряжения:
др.,
которое вызывает эквивалентное изменение
выходного
напряжения:
Uвх.др. = Uвых.др./KU,
где KU — коэффициент усиления по напряжению.
Причины дрейфа нуля: изменение питающих напряжений, температуры, постепенное изменение параметров активных и пассивных элементов схем.
Основные меры уменьшения дрейфа:
— предварительный прогрев усилителя;
— стабилизация напряжения источников питания;
— использование компенсационных схем, элементов с нелинейной зависимостью параметров от температуры;
— преобразование постоянного тока в переменный и усиление переменного тока с последующим преобразованием в постоянный (МДМ).
Усилители с преобразованием напряжения (МДМ) используют, когда допустимый дрейф нуля составляет единицы микровольт:
М
У
ДМ
Uвх
Uвых
В модуляторе М
медленно меняющееся входное напряжение
преобразуется в амплитудно модулированное
переменное, которое усиливается
усилителем У переменного напряжения. Усиленное переменное напряжение
поступает на демодулятор ДМ.
Усиленное переменное напряжение
поступает на демодулятор ДМ.
Дрейф нуля такого усилителя значительно меньше, чем у обычных УПТ.
В настоящее время промышленностью широко выпускаются операционные усилители (ОУ) в интегральном исполнении.
Операционными усилителями называют усилители постоянного тока с дифференциальным входом и однотактным выходом, отличающиеся высоким коэффициентом усиления, большим входным и малым выходным сопротивлениями.
Условное обозначение ОУ:
+Eп
Uвх1
Uвых
Uвх2
-Eп
В
зависимости от полярности сигналов на
выходе
один из входов называется инвертирующим,
другой — неинвертирующим.
Для ОУ типичны следующие значения параметров:
— коэффициент усиления k = 105-106;
— дрейф нуля ε = 2-3 мкВ/ºC;
— входной ток Iвх.ср. = 5-10 нА.
Принципиальная схема ОУ содержит, как правило, 1, 2 или 3 каскада усиления напряжения, причём входной каскад всегда выполнен по дифференциальной схеме.
Для повышения точности измерительных усилителей широко применяется отрицательная обратная связь.
Измерительные преобразователи электрических величин (стр. 1 из 6)
СЕВАСТОПОЛЬСКИЙ НАЦИОНАЛЬНЫЙ УНИВЕРСИТЕТ
ЯДЕРНОЙ ЭНЕРГИИ И ПРОМЫШЛЕННОСТИ
Реферат
по дисциплине ОМЭТ
Тема: Измерительные преобразователи. Классификация, принцип действия, электрические схемы, режим работы, метрологические характеристики и области применения
Студента Группы ЭСЭ 22-в
Левицкого Павла Владимировича
Проверил ——————————(——————)
Севастополь
2008 г.
Введение
Конкретные методы измерений определяются видом измеряемых величин, их размерами, требуемой точностью результата, быстротой процесса измерения, условиями, при которых проводятся измерения, и рядом других признаков. Каждую физическую величину можно измерить несколькими методами, которые могут отличаться друг от друга особенностями как технического, так и методического характера. В отношении технических особенностей можно сказать, что существует множество методов измерения, и по мере развития науки и техники, число их все увеличивается. С методической стороны все методы измерений поддаются систематизации и обобщению по общим характерным признакам. Рассмотрение и изучение этих признаков помогает не только правильному выбору метода и его сопоставлению с другими, но и существенно облегчает разработку новых методов измерения. Для прямых измерений можно выделить несколько основных методов: метод непосредственной оценки, дифференциальный метод, нулевой метод и метод совпадений. При косвенных измерениях широко применяется преобразование измеряемой величины в процессе измерений. Если мы проанализируем известные нам процессы измерений, то обнаружим, что в подавляющем большинстве случаев мы получаем числовое значение измеряемой величины, только после того, как тем или иным способом видоизменим ее. Рассмотрим в качестве примера измерение массы тела, которую мы измеряем с помощью обыкновенных равноплечих весов. Под действием земного притяжения создаются силы. Масса тела вместе с этими силами давит на одну чашку, а масса гирь — на другую. Подбирая гири, мы добиваемся равновесия, т.е. равенство этих сил. Это дает нам право сказать, что масса взвешиваемого тела равна массе гирь, принимая, что сила земного притяжения на расстоянии между чашками остается одной и той же. Как видим, для измерения массы нам пришлось преобразовать массы тела и гирь в силы, а для сравнения сил между собой преобразовать их действие в механическое перемещение рычагов весов. Приведенный пример показывает, что даже простые измерения проводятся путем преобразования измеряемой величины.
При косвенных измерениях широко применяется преобразование измеряемой величины в процессе измерений. Если мы проанализируем известные нам процессы измерений, то обнаружим, что в подавляющем большинстве случаев мы получаем числовое значение измеряемой величины, только после того, как тем или иным способом видоизменим ее. Рассмотрим в качестве примера измерение массы тела, которую мы измеряем с помощью обыкновенных равноплечих весов. Под действием земного притяжения создаются силы. Масса тела вместе с этими силами давит на одну чашку, а масса гирь — на другую. Подбирая гири, мы добиваемся равновесия, т.е. равенство этих сил. Это дает нам право сказать, что масса взвешиваемого тела равна массе гирь, принимая, что сила земного притяжения на расстоянии между чашками остается одной и той же. Как видим, для измерения массы нам пришлось преобразовать массы тела и гирь в силы, а для сравнения сил между собой преобразовать их действие в механическое перемещение рычагов весов. Приведенный пример показывает, что даже простые измерения проводятся путем преобразования измеряемой величины. Необходимо отметить, что преобразования измеряемых величин всегда таят в себе опасность внесения погрешностей. Например, при взвешивании, описанном выше, мы не учли закона Архимеда, в соответствии с которым вес тела, находящегося в какой — либо среде, уменьшается на вес вытесненного телом объема среды, если плотность материала гирь отличается от плотности вещества взвешиваемого тела. Другими словами, объем вытесненного воздуха различен, при взвешивании влияние этого явления может исказить результат. Правда это влияние оказывается очень небольшим и учитывать его приходится только при точных взвешиваниях, в частности, при взвешивании драгоценных металлов. Основным выводом из сказанного является то, что в подавляющем большинстве случаев измерения связаны с преобразованием измеряемой величины.
Необходимо отметить, что преобразования измеряемых величин всегда таят в себе опасность внесения погрешностей. Например, при взвешивании, описанном выше, мы не учли закона Архимеда, в соответствии с которым вес тела, находящегося в какой — либо среде, уменьшается на вес вытесненного телом объема среды, если плотность материала гирь отличается от плотности вещества взвешиваемого тела. Другими словами, объем вытесненного воздуха различен, при взвешивании влияние этого явления может исказить результат. Правда это влияние оказывается очень небольшим и учитывать его приходится только при точных взвешиваниях, в частности, при взвешивании драгоценных металлов. Основным выводом из сказанного является то, что в подавляющем большинстве случаев измерения связаны с преобразованием измеряемой величины.
1. Измерительные преобразователи. Классификация, принцип действия, электрические схемы, режим работы, метрологические характеристики и области применения
1.1 Метрологические термины и определения
Измерения проводятся с помощью технических средств измерений. Основные виды средств измерений следующие:- мера – средство измерений, предназначенное для воспроизведения физической величины заданного размера, например, мера массы – гиря;- измерительный прибор –это средство измерений, предназначенное для выработки сигнала измерительной информации в форме, доступной для непосредственного восприятия оператором. — измерительный преобразователь –это средство измерений, предназначенное для выработки сигнала измерительной информации в форме, удобной для передачи, дальнейшего преобразования, обработки и хранения, но не подающейся непосредственному восприятию оператором. Измерительные преобразователи в зависимости от их назначения подразделяются на первичные, промежуточные, передающие, масштабные и другие.- первичный измерительный преобразователь – это преобразователь, к которому подведена измеряемая величина. Передающий измерительный преобразователь предназначен для дистанционной передачи сигнала измерительной информации, масштабный измерительный преобразователь – для изменения измеряемой величины в заданное число раз.
Основные виды средств измерений следующие:- мера – средство измерений, предназначенное для воспроизведения физической величины заданного размера, например, мера массы – гиря;- измерительный прибор –это средство измерений, предназначенное для выработки сигнала измерительной информации в форме, доступной для непосредственного восприятия оператором. — измерительный преобразователь –это средство измерений, предназначенное для выработки сигнала измерительной информации в форме, удобной для передачи, дальнейшего преобразования, обработки и хранения, но не подающейся непосредственному восприятию оператором. Измерительные преобразователи в зависимости от их назначения подразделяются на первичные, промежуточные, передающие, масштабные и другие.- первичный измерительный преобразователь – это преобразователь, к которому подведена измеряемая величина. Передающий измерительный преобразователь предназначен для дистанционной передачи сигнала измерительной информации, масштабный измерительный преобразователь – для изменения измеряемой величины в заданное число раз.
— измерительное устройство – это средство измерений, состоящее из измерительных приборов и измерительных преобразователей. В зависимости от назначения измерительные устройства подразделяются на первичные и вторичные. — измерительные информационные системы – это измерительное устройство, которое осуществляет многоканальное измерение и обработку информации по некоторому заданному алгоритму.
1.2 Физические основы преобразователей
1.2.1 Резистивные преобразователи
Реостатные преобразователи
Реостатным преобразователем называют реостат, подвижный контакт которого перемещается в соответствии со значением измеряемой величины. Естественная входная величина реостатного преобразователя — перемещение, выходная — активное сопротивление.
Используют реостатные преобразователи двух основных типов: проволочные и пленочные. Наибольшее распространение получили проволочные преобразователи, схема конструкции которых приведена на рис. 1, а. На неподвижный каркас плотно наматывают изолированный провод, который образует обмотку с сопротивлением R. Обмотка включается в цепь постоянного напряжения V. На обмотке очищается от изоляции «контактная дорожка», по которой может перемещаться щетка 1, жестко закрепленная в щеткодержателе 2. При этом создается скользящая контактная пара: щетка — контактная дорожка. Каркас преобразователя изготавливают из изоляционных материалов: эбонита, текстолита, радиокерамики и других. Наиболее распространенными материалами
Обмотка включается в цепь постоянного напряжения V. На обмотке очищается от изоляции «контактная дорожка», по которой может перемещаться щетка 1, жестко закрепленная в щеткодержателе 2. При этом создается скользящая контактная пара: щетка — контактная дорожка. Каркас преобразователя изготавливают из изоляционных материалов: эбонита, текстолита, радиокерамики и других. Наиболее распространенными материалами
Рис. 1. Реостатные преобразователи
Провода являются манганин, константан, а также сплавы из благородных металлов; золота с никелем, серебра с медью и других. Диаметр провода изменяется, в пределах 0,03-0,1 мм для прецизионных реостатов и достигает 0,3 мм в грубых реостатах. Щетку выполняют в виде двух-трех проволочек диаметром 0,1-0,2 мм. Каркас может иметь не только прямоугольную, но и более сложную форму. Для получения нелинейной характеристики используют фигурные каркасы (рис. 1,6).Статической характеристикой реостатного преобразователя является зависимость Rвых = f(x) или Uвых = ψ(x), где х — перемещение щетки. Эти зависимости могут быть линейными (рис. 1, а) и нелинейными (рис.1, б). На рис.1, а сплошной линией показана реальная характеристика проволочных реостатных преобразователей. Ступенчатый вид характеристики показывает, что при движении щетки в момент перехода от одного витка к другому сопротивление или напряжение изменяется скачками. С помощью ступенчатой кривой определяется порог чувствительности или витковая погрешность преобразователя. Для линейного реостата витковая погрешность определяется.
Эти зависимости могут быть линейными (рис. 1, а) и нелинейными (рис.1, б). На рис.1, а сплошной линией показана реальная характеристика проволочных реостатных преобразователей. Ступенчатый вид характеристики показывает, что при движении щетки в момент перехода от одного витка к другому сопротивление или напряжение изменяется скачками. С помощью ступенчатой кривой определяется порог чувствительности или витковая погрешность преобразователя. Для линейного реостата витковая погрешность определяется.
Наиболее распространенные схемы включения реостатных преобразователей приведены на рис.2. Недостаток первых трех схем — нелинейная зависимость тока от перемещения движка. Значительно меньшую нелинейность имеют мостовые схемы (рис. 2.г и д).Расчет линейного реостатного преобразователя сводится к определению диаметра и длины намоточного провода, а также геометрических размеров каркаса. Реостатные преобразователи применяют для измерения перемещений. В сочетании с упругими элементами их используют в датчиках для измерения усилий и давлений. Основной недостаток реостатных преобразователей — наличие трущегося контакта, которое приводит, с одной стороны, к уменьшению надежности, с другой — к возникновению погрешности преобразователя вследствие изменения контактного сопротивления. Во многих случаях нежелательное явление — наличие дискретности.
Основной недостаток реостатных преобразователей — наличие трущегося контакта, которое приводит, с одной стороны, к уменьшению надежности, с другой — к возникновению погрешности преобразователя вследствие изменения контактного сопротивления. Во многих случаях нежелательное явление — наличие дискретности.
Тензорезисторные преобразователи
В основе работы тензорезисторных преобразователей лежит явление тензоэффекта, заключающееся в изменении активного сопротивления проводников при их механической деформации. Входная величина преобразователя — деформация, выходная — изменение сопротивления. В настоящее время получили распространение проволочные, фольговые и полупроводниковые тензорезисторы. В наиболее простом случае тензорезисторы представляют собой отрезок проволоки, который жестко закреплен при помощи клея или цемента На упругодеформируемой детали. Сжатие или растяжение детали вызывает пропорциональное сжатие или растяжение проволоки, в результате чего изменяются ее длина, поперечное сечение и удельное сопротивление, что в итоге приводит к изменению электрического сопротивления проволоки
R = ρ
где l — длина;
S — поперечное сечение;
ρ — удельное сопротивление проволоки, то при растяжении ее сопротивление изменится на величину ΔR и составит R + ΔR. Относительное изменение сопротивления тензорезистора равно
Относительное изменение сопротивления тензорезистора равно
=
( l + 2 μ)
|
Заглавная страница
КАТЕГОРИИ: Археология ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрации Техника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ? Влияние общества на человека Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Балочные системы. Определение реакций опор и моментов защемления |
⇐ ПредыдущаяСтр 2 из 10Следующая ⇒ Общие сведения. Масштабным называют измерительный преобразователь, предназначенный для изменения величины в заданное число раз. К ним относят шунты, делители напряжений, измерительные усилители, измерительные трансформаторы тока и напряжения. Шунты. Для уменьшения силы тока в определенное число раз применяют шунты. Например, такая задача возникает в том случае, когда диапазон показаний амперметра меньше диапазона изменения измеряемого тока. Шунт представляет собой резистор, включаемый параллельно средству измерений. Если сопротивление шунта RШ = R /(n—1), где R — сопротивление средства измерений; — коэффициент шунтирования, то ток I2 в n раз меньше тока I1. Шунты изготавливают из манганина. Шунты применяют с различными средствами измерений, однако в основном их используют в цепях постоянного тока в магнитоэлектрических приборах. Шунты с измерительными механизмами других типов не применяют из-за малой чувствительности этих механизмов, что приводит к существенному увеличению размеров шунтов и потребляемой ими мощности. Кроме того, при использовании шунтов на переменном токе возникает дополнительная погрешность от изменения частоты, так как с изменением частоты сопротивления шунта и измерительного механизма изменяются неодинаково. Делители напряжения. Для уменьшения напряжения в определенное число раз применяют делители напряжения, которые в зависимости от рода напряжения могут быть выполнены на элементах, имеющих чисто активное сопротивление, емкостное или индуктивное сопротивление. Для увеличения верхнего предела измерения средства измерений, например предела измерения вольтметра, имеющего внутреннее сопротивление RV, применяют добавочные резисторы, включаемые последовательно с вольтметром. При этом добавочный резистор и вольтметр образуют делитель напряжения. Сопротивление добавочного резистора определяют по формуле , где Ux — измеряемое напряжение; UV — падение напряжения на вольтметре; RV — внутреннее сопротивление вольтметра. Добавочные резисторы изготавливают из манганина и используют в цепях постоянного и переменного тока (до 20 кГц) напряжением до 30 кВ. Они бывают встраиваемые внутрь прибора и наружные. Классы точности калиброванных добавочных резисторов от 0,01 до 1. Измерительные усилители. Для усиления сигналов постоянного и переменного тока, т. е. для расширения пределов измерения в сторону малых сигналов, применяют измерительные усилители. По диапазону частот измерительные усилители бывают для постоянного тока и напряжения, низкочастотными (20 Гц—200 кГц), высокочастотными (до 250 МГц) и селективными, усиливающими сигналы в узкой полосе частот. Измерительные усилители выполняют с нормированной погрешностью коэффициента передачи. Электронные измерительные усилители позволяют измерять сигналы от 0,1 мВ и 0,3 мкА с погрешностью от 0,1 до 1 %. При меньших токах и напряжениях применяют фотогальванометрические усилители. Для усиления токов и напряжений от источников с большим внутренним сопротивлением используют электрометрические усилители, отличающиеся большим входным сопротивлением (до Ом). Серийно выпускаемые измерительные усилители имеют унифицированный номинальный выходной сигнал 10 В или 5 мА. Измерительные трансформаторы переменного тока. Измерительные трансформаторы тока и напряжения используют как преобразователи больших переменных токов и напряжений в относительно малые токи и напряжения, допустимые для измерений приборами с небольшими стандартными пределами измерения (например, 5А, 100 В). Применением измерительных трансформаторов в цепях высокого напряжения достигается безопасность для персонала, обслуживающего приборы, так как приборы при этом включаются в заземляемую цепь низкого напряжения (см. рис. 6.2). Измерительные трансформаторы состоят из двух изолированных друг от друга обмоток: первичной с числом витков и вторичной— , помещенных на ферромагнитный сердечник. Для правильного включения трансформаторов и приборов зажимы трансформатора обозначают, как показано на рисунке.
Рисунок 6.2
В трансформаторах тока, как правило, первичный ток больше вторичного , поэтому у них . В трансформаторах напряжения первичное напряжение U1 больше вторичного U2, поэтому у них >w2. Вторичное номинальное напряжение U2Н у стандартных трансформаторов составляет 100 или 100/ В при разных значениях первичного номинального напряжения U1Н. По схемам включения в измеряемую цепь и по условию работы трансформаторы тока и напряжения отличаются друг от друга. Первичную обмотку трансформатора тока включают в измеряемую цепь последовательно, а трансформаторов напряжения параллельно. Измерительные приборы включают во вторичную обмотку трансформаторов. По показаниям приборов можно определить значения измеряемых величин. Для этого необходимо показания приборов умножить на действительные коэффициенты трансформации KI и КU. Так как I2 и U2 изменяются не пропорционально I1 и U1, то KI и КU непостоянны. Они зависят от значений токов и напряжений, характера и значения нагрузки вторичной цепи, частоты тока, а также от конструкции трансформатора и материала сердечника и обычно неизвестны. Поэтому показания приборов умножают не на действительные, а на постоянные номинальные коэффициенты трансформации: Определение измеряемых величин по номинальным коэффициентам трансформации приводит к погрешностям. Относительная погрешность (в процентах) вследствие неравенства действительного и номинального коэффициентов трансформации для трансформатора тока
где и , а для трансформатора напряжения
где и Погрешность f I называют токовой погрешностью, а f U — погрешностью напряжения. Как известно из теории трансформаторов, в идеальном случае фазовый сдвиг между вектором вторичного тока I2 трансформатора тока и вектором первичного тока I 1 составляет 180°. Такой же фазовый сдвиг должен быть между векторами вторичного U 2 и первичного U 1 напряжений в трансформаторе напряжения. В реальных трансформаторах угол между повернутым на 180° вектором вторичной величины (-I 2 или –U 2) и соответствующим вектором первичной величины (I 1 или U 1) не равен нулю, а составляет угол , который называют угловой погрешностью трансформатора. Измерительные трансформаторы тока. Трансформатор тока работает в режиме, близком к режиму короткого замыкания, так как в его вторичную обмотку включаются приборы с малым сопротивлением. Полное суммарное сопротивление Z = R + jX приборов и подводящих проводов является нагрузкой трансформатора тока. Для переносных измерительных трансформаторов тока установлены классы точности от 0,01 до 0,2. Их изготавливают на номинальную частоту или область номинальных частот от 25 Гц до 10 кГц. Трансформаторы тока выпускают на номинальные значения первичного тока от 0,1 А до 30 кА и на номинальное значение вторичного тока 5 А. Для частоты 50 Гц допускается изготовление трансформаторов тока на номинальный вторичный ток 1 и 2 А. Стационарные трансформаторы тока для частоты 50 Гц делают на номинальные первичные токи от 1 А до 40 кА и номинальные вторичные токи 1; 2; 2,5; 5 А. Измерительные трансформаторы напряжения. Измерительные трансформаторы напряжения работают в режиме, близком к режиму холостого хода, так как во вторичную обмотку включают приборы с относительно большим, внутренним сопротивлением. Стационарные трансформаторы напряжения изготавливают на номинальные первичные напряжения от 220 В до 35 кВ при вторичном напряжении 150,100 и 100/ В для номинальной нагрузки от 5 до 25 ВА с = 0,8 1,0.
⇐ Предыдущая12345678910Следующая ⇒ Читайте также: Коммуникативные барьеры и пути их преодоления Рынок недвижимости. Сущность недвижимости Решение задач с использованием генеалогического метода История происхождения и развития детской игры |
|
Последнее изменение этой страницы: 2021-05-12; просмотров: 137; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia. |
 Все правила по сольфеджио
Все правила по сольфеджио
 В амперметрах для измерения небольших токов (до 30 А) шунты обычно помещают в корпусе прибора, для измерения больших токов (до 7500 А) применяют наружные шунты. Шунты могут быть многопредельными, т. е. состоящими из нескольких резисторов, или имеющими несколько отводов, что позволяет изменять коэффициент шунтирования. Классы точности шунтов от 0,02 до 0,5.
В амперметрах для измерения небольших токов (до 30 А) шунты обычно помещают в корпусе прибора, для измерения больших токов (до 7500 А) применяют наружные шунты. Шунты могут быть многопредельными, т. е. состоящими из нескольких резисторов, или имеющими несколько отводов, что позволяет изменять коэффициент шунтирования. Классы точности шунтов от 0,02 до 0,5. Серийно выпускают делители напряжения, предназначенные для расширения пределов измерений компенсаторов постоянного тока. Такие делители выполняют из резисторов на основе манганина. Они имеют нормированные коэффициенты деления и классы точности от 0,0005 до 0,01.
Серийно выпускают делители напряжения, предназначенные для расширения пределов измерений компенсаторов постоянного тока. Такие делители выполняют из резисторов на основе манганина. Они имеют нормированные коэффициенты деления и классы точности от 0,0005 до 0,01. Номинальный ток добавочных резисторов от 0,5 до 30 мА.
Номинальный ток добавочных резисторов от 0,5 до 30 мА.
 В трансформаторах тока с первичным номинальным током I1Н свыше 500А первичная обмотка может состоять из одного витка в виде шины, проходящей через окно сердечника.
В трансформаторах тока с первичным номинальным током I1Н свыше 500А первичная обмотка может состоять из одного витка в виде шины, проходящей через окно сердечника. Для трансформатора тока KI=I1/I2 , а для трансформатора напряжения KU=U1/U2.
Для трансформатора тока KI=I1/I2 , а для трансформатора напряжения KU=U1/U2. У измерительных трансформаторов имеется также угловая погрешность из-за неточности передачи фазы первичной величины вторичной величине. Угловая погрешность измерительных трансформаторов оказывает влияние на показания приборов, отклонение подвижной части которых зависит от фазового сдвига между токами в цепях этих приборов (ваттметры, счетчики электрической энергии, фазометры).
У измерительных трансформаторов имеется также угловая погрешность из-за неточности передачи фазы первичной величины вторичной величине. Угловая погрешность измерительных трансформаторов оказывает влияние на показания приборов, отклонение подвижной части которых зависит от фазового сдвига между токами в цепях этих приборов (ваттметры, счетчики электрической энергии, фазометры). Погрешность считается положительной, если повернутый на 180° вектор вторичной величины опережает вектор первичной величины.
Погрешность считается положительной, если повернутый на 180° вектор вторичной величины опережает вектор первичной величины. Классы точности этих трансформаторов от 0,2 до 10. Класс точности стационарных трансформаторов тока определяет предельные значения токовой и угловой погрешностей. В частности, для трансформаторов классов точности от 0,2 до 1 допускаемое значение токовой погрешности, соответствующее классу точности, имеет место при значении первичного тока 100—120 % номинального, а для трансформаторов более низких классов точности — при значении первичного тока 50—120 %. При других значениях первичного тока допускаемая токовая погрешность увеличивается. Трансформаторы тока изготавливают на определенную номинальную нагрузку, например, для стационарных трансформаторов от 2,5 до 100 ВА.
Классы точности этих трансформаторов от 0,2 до 10. Класс точности стационарных трансформаторов тока определяет предельные значения токовой и угловой погрешностей. В частности, для трансформаторов классов точности от 0,2 до 1 допускаемое значение токовой погрешности, соответствующее классу точности, имеет место при значении первичного тока 100—120 % номинального, а для трансформаторов более низких классов точности — при значении первичного тока 50—120 %. При других значениях первичного тока допускаемая токовая погрешность увеличивается. Трансформаторы тока изготавливают на определенную номинальную нагрузку, например, для стационарных трансформаторов от 2,5 до 100 ВА. Классы точности 0,5; 1 и 3. Лабораторные трансформаторы чаще всего бывают переносными на несколько пределов измерения и классов точности 0,05; 0,1; 0,2 и 0,5. Для трехфазных цепей изготовляют трехфазные трансформаторы напряжения.
Классы точности 0,5; 1 и 3. Лабораторные трансформаторы чаще всего бывают переносными на несколько пределов измерения и классов точности 0,05; 0,1; 0,2 и 0,5. Для трехфазных цепей изготовляют трехфазные трансформаторы напряжения. su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь — 161.97.168.212 (0.011 с.)
su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь — 161.97.168.212 (0.011 с.) Как ПЛК выполняет масштабирование датчика? Масштабирование в ПЛК
Меня всегда удивляло, как система автоматизации, такая как ПЛК или РСУ, выполняет масштабирование датчика? или даже иногда думать о простом полевом преобразователе , масштабирующем методы для преобразования любого типа выходного сигнала датчика в стандартный 4-20 мА.
Например, рассмотрим датчик температуры, и мы все знаем, что с помощью простой формулы можно рассчитать эквивалентную температуру по выходному сопротивлению датчика RTD. В случае с термопарой требуется сложный алгоритм для преобразования ее выходного милливольта в эквивалентный температура.
Итак, теперь возникает вопрос: как ПЛК, РСУ или преобразователь выполняет масштабирование?
Давайте подробно обсудим масштабирование.
Как ПЛК выполняет масштабирование датчика?
Масштабирование — это процесс получения сигнала, такого как переменная процесса, выходное напряжение или ток, с датчика, и применения расчетов для представления этого сигнала в более удобной форме с точки зрения инженерных единиц, таких как PSI, °F или %RH оператору в диспетчерской.
В мире сбора данных используются три общепринятых метода, включая линейное масштабирование, картографическое масштабирование и масштабирование по формуле.
Все три метода имеют свое место и время для использования и будут описаны в этой статье.
Методы масштабирования
В этой статье мы рассмотрим три метода масштабирования: линейный, картографический и формульный.
Эти три метода немного пересекаются, как мы объясним, но они являются основными методами, используемыми в мире сбора данных.
Просто чтобы дать краткий обзор этих трех методов и того, для чего их лучше всего использовать, мы составили таблицу ниже.
В некоторых случаях, когда масштабирование на основе формулы недоступно, отображение может использоваться для предварительного определения таблицы на основе необходимой формулы и наоборот.
Также стоит отметить, что при работе с датчиком, имеющим аналоговый выход, единицы измерения, указанные для этого датчика, не являются фиксированными.
Например,
, если ваш датчик имеет выходной сигнал от 4 до 20 мА для диапазона от -40 до 100 °C, было бы так же легко масштабировать выходной сигнал в градусах Фаренгейта, сказав, что единица имеет диапазон от -40 до 212°F. Мы коснемся этого подробнее в следующем разделе.
Линейное масштабирование
Техника линейного масштабирования должна напомнить вам несколько дней назад, когда вы занимались основами алгебры. Он использует старую форму пересечения наклона ‘y = mx + b’ , где
-
y — ваш выходной сигнал (также известный как значение инженерных единиц),
-
x — ваш ввод (будь то напряжение, миллиампер).
 , и т. д.),
, и т. д.), -
м — это ваш наклон (также известный как масштабный коэффициент), а
-
b — точка пересечения по оси Y (также известная как смещение).
Как указывалось ранее, линейное масштабирование лучше всего работает с линейными выходами напряжения или тока, в которых минимальные и максимальные выходы представляют определенные значения вместе с диапазоном датчиков.
Если вы немного заржавели, не бойтесь, мы дадим вам пару примеров, чтобы освежить ситуацию.
Пример 1
Рассмотрим датчик уровня с диапазоном от 0 до 100 футов водяного столба и выходным напряжением от 0 до 10 В постоянного тока. Эти спецификации говорят нам о двух вещах:
Лучше всего начать с масштабного коэффициента, или m в уравнении. Фактор m можно найти, используя формулу наклона
m = (y 2 -y 1 ) / (x 2 -x 1 )’ и выбрав две точки на линейной шкале.
После определения коэффициента масштабирования мы просто подставляем значение m обратно в формулу пересечения наклона и используем одну из наших точек для расчета нашего смещения.
-
Мы будем использовать две точки (0, 0) и (10, 100) для расчета коэффициента масштабирования или m.
м = (у 2 -у 1 ) / (х 2 -x 1 ) = (100 – 0) / (10 – 0) = 100 / 10
Следовательно, m = 10
-
Теперь воспользуемся формулой пересечения наклона и точкой (0, 0 ) для вычисления смещения или b.
y = mx + b, где y = 0, x = 0, m = 10, b неизвестно.
0 = 10(0) + b = 0 + b
Следовательно, b = 0
-
Всегда полезно проверить правильность вашего масштабного коэффициента и смещения, подставив вторую точку в наше завершенное уравнение, которое в данном случае (10, 100).
y = mx + b, где y = 100, x = 10, m = 10 и b = 0.
 проверил, что наш коэффициент масштабирования и смещение верны.
проверил, что наш коэффициент масштабирования и смещение верны.
Пример 2
Учитывая, что пример от 0 до 10 В довольно прост, давайте перейдем к чему-то более сложному, например, к выходу от 4 до 20 мА.
Мы по-прежнему будем использовать датчик уровня с диапазоном от 0 до 100 футов водяного столба, но на этот раз мы будем использовать выход от 4 до 20 мА. Эти спецификации снова говорят нам о двух вещах:
Мы рассмотрим этот пример таким же образом, как и в предыдущем, сначала найдя масштабный коэффициент, а затем подставив несколько чисел для расчета смещения.
-
Мы будем использовать две точки (4, 0) и (20, 100) для расчета коэффициента масштабирования или m.
м = (у 2 -у 1 ) / (х 2 -х 1 ) = (100 – 0) / (20 – 4) = 100 / 16
м = 0,025 м = 0,025
-
Теперь мы будем использовать формулу пересечения наклона и точку (4, 0) для расчета смещения или b.
y = mx + b, где y = 0, x = 4, m = 6,25, b неизвестно.
0 = 6,25(4) + b = 25 + b
Следовательно, b = -25
-
Всегда полезно проверить правильность вашего масштабного коэффициента и смещения, подставив вторую точку в наше законченное уравнение, что в данном случае равно (20, 100).
y = mx + b, где y = 100, x = 20, m = 6,25 и b = -25.
100 = 6,25(20) + (-25) = 100
Учитывая, что эта арифметическая операция верна, мы убедились, что наш коэффициент масштабирования и смещение верны.
Масштабирование по карте
Техника масштабирования по карте часто встроена и предварительно запрограммирована для таких входов, как термопары, Pt100/1000 и другие резистивные датчики температуры.
Например, , когда вы настраиваете систему сбора данных для измерения термопары типа K, система уже знает, какой милливольтовый выход термопары соответствует какой температуре.
Этот пример относится не только к термопарам типа K, но и к любому типу обычно используемых резистивных датчиков температуры или других связанных датчиков.
Однако в некоторых случаях нам потребуется создать собственную таблицу сопоставления.
-
Одним из таких случаев может быть, когда мы работаем с системой сбора данных, которая не настроена предварительно для использования с резистивными датчиками температуры. Это не очень распространенная ситуация, с которой мы сталкиваемся, но об этом стоит упомянуть.
-
В другом случае у нас есть нелинейная функция, а масштабирование на основе формул недоступно или является кусочной функцией. Хорошим примером этого может быть использование датчика уровня для расчета объема резервуара в нелинейном резервуаре.
Обычно, когда мы хотим узнать объем жидкости в резервуаре, мы измеряем глубину или уровень резервуара.
Зная это, мы можем рассчитать объем жидкости. Если бы у резервуара было плоское дно и одинаковый диаметр и высота, тогда этот расчет был бы простым, и мы могли бы использовать линейное масштабирование, как показано выше.
Однако, как правило, эти баки имеют округлую форму, и уровень жидкости не имеет прямого отношения к объему жидкости. В этой ситуации мы должны использовать сопоставленное масштабирование и немного математики, чтобы получить желаемый результат.
В нашем примере мы будем использовать горизонтальный цилиндрический резервуар диаметром 5 футов и длиной 10 футов.
Существует ряд сложных тригонометрических формул, используемых для определения заполненного объема такого резервуара, мы собираемся пропустить их, поскольку они слишком сложны для объема этой статьи. Вместо этого мы проведем расчеты и покажем вам таблицу сопоставления значений.
Кроме того, в этом примере мы снова будем использовать датчик уровня, но на этот раз с выходным напряжением от 0 до 10 В постоянного тока и диапазоном от 0 до 5 футов по воде.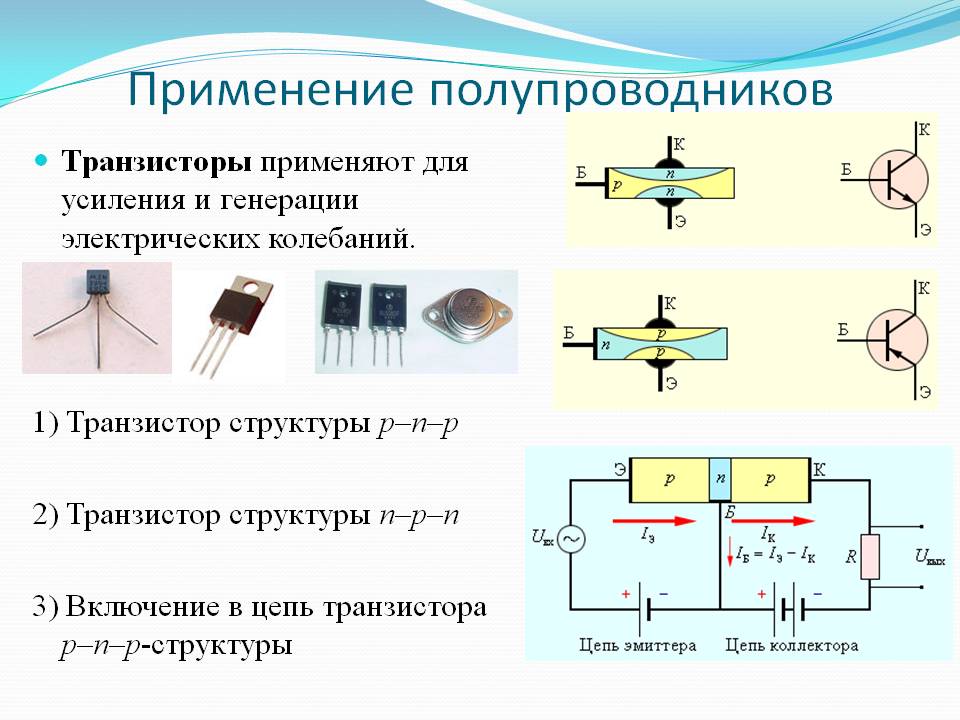
Если это картографическая таблица, запрограммированная в вашей системе сбора данных, то объем будет рассчитываться, а не просто измеряться глубина.
Как правило, чем больше точек в таблице, тем точнее будут расчеты. Чтобы продемонстрировать эту концепцию, давайте в качестве примера возьмем выходной сигнал 1 В.
-
Выход 1 В говорит нам о том, что в резервуаре есть глубина 0,5 фута. Получается примерно 76 галлонов.
-
1 В находится между 0 В и 2 В в нашей таблице, поэтому система сбора данных установит линейную шкалу между этими двумя точками и скажет, что выход 1 В составляет 104,5 галлона, что почти на 30 галлонов меньше!
Масштабирование по формуле
Этот метод может стать одним из самых мощных методов масштабирования, однако он часто потребляет ресурсы, и большинство систем сбора данных, хранящих данные с высокой скоростью, не могут справиться с этим процессом.
Для систем сбора данных, которые не могут выполнять масштабирование по формуле, есть две альтернативы:
-
Сохранение необработанных значений и применение необходимых формул к данным после того, как данные были сохранены из системы сбора данных. Обычно это можно сделать в программном обеспечении, таком как Microsoft Excel.
-
Использование программируемого калькулятора сигналов. Этот тип устройства может быть сконфигурирован для обработки нескольких входных данных с помощью определяемой пользователем формулы и предоставления линейного выходного сигнала.
Масштабирование формулы можно использовать во многих областях. Мы рассмотрим два возможных сценария для этого метода: объем резервуара с вертикальным цилиндром и перепад давления.
Пример 1
Для вертикального цилиндрического резервуара объем заполнения можно рассчитать по формуле «V = π r 2 f », где
-
V — заполненный объем,
-
r — радиус бака, а
-
f — высота заполнения.

Предположим, что наш резервуар имеет диаметр 5 футов и высоту 10 футов. Опять же, давайте использовать датчик уровня для нашего примера с диапазоном WC от 0 до 10 футов и выходным напряжением от 0 до 5 В постоянного тока.
Датчик уровня дает нам нашу высоту заполнения или f. Исходя из этой высоты заполнения, мы можем напрямую рассчитать объем заполнения или V. Мы будем использовать некоторые из тех же методов линейного масштабирования, чтобы получить f и применить вычисления поверх этого.
-
Сначала мы рассчитаем линейное масштабирование для высоты заливки или f. Я пропущу несколько шагов, так как мы рассмотрели это в первом разделе.
y = f = 2x, где x — выходное напряжение датчика.
-
Теперь мы можем заменить f в формуле вертикального цилиндрического резервуара на 2x.
V = π r 2 f = π (2,5) 2 (2x) = π 12,5x
Пример 2 перепад давления.

Очевидно, что существует ряд датчиков перепада давления, которые дают линейный выходной сигнал, но по опыту я могу сказать вам, что этот метод расчета перепада давления имеет множество применений.
В этом примере мы будем использовать два преобразователя с диапазоном от 0 до 100 PSI и выходным напряжением от 0 до 10 В постоянного тока.
Один будет помещен внутрь сосуда под давлением, погруженного под воду, а другой будет размещен снаружи этого сосуда. Дифференциальное давление будет определять величину силы, действующей на стенки сосуда.
Расчеты здесь очень просты. Просто вычесть одно из другого.
Р дифференциал = Р внешний – P внутренний
Заключение
Существует три наиболее часто используемых метода масштабирования выходных сигналов датчика:
- Линейное масштабирование,
- Масштабирование по формуле и
- 4 90масштабирование.

Как видите, во многих случаях может работать более одного из этих методов, и лучший выбор обычно зависит от аппаратного/программного обеспечения, с которым вы работаете.
С линейным масштабированием проще всего работать, однако датчики с линейными выходами, как правило, дороже, поскольку для линеаризации необработанных выходных данных преобразователя требуется дополнительное оборудование.
Масштабирование по карте используется чаще, чем мы склонны даже замечать. Каждый раз, когда резистивный датчик температуры дает вам показания температуры, где-то на линии работает картографическое масштабирование.
Масштабирование по формуле очень мощное, но требует конфигурации аппаратного/программного обеспечения.
Источник статьи: Omni Instruments
Статьи, которые могут вам понравиться:
Простое преобразование 4–20 мА
РСУ, ПЛК или RTU?
Логика отключения двигателя с использованием ПЛК
Необработанные значения в инженерных единицах
Коэффициент динамического диапазона передатчика
Будьте первым, кто получит эксклюзивный контент прямо на вашу электронную почту.
Обещаем не спамить. Вы можете отписаться в любое время.
Неверный адрес электронной почты
Automotive Lab Scope Diagnostics
1. Что такое осциллограф?
В отличие от вольтметра, с помощью осциллографа можно увидеть не только средние значения напряжения в измеряемых цепях, но также изменение и форму этого напряжения во времени.
Все осциллографы имеют экраны, на которых отображается осциллограмма. Экран может быть типа электронно-лучевой трубки, жидкокристаллического дисплея (ЖКД) или в виде компьютерной программы. Типичный экран осциллографа разделен на равные промежутки (деления), которые позволяют визуально интерпретировать параметры сигнала.
Графики, отображаемые на мониторе, называются осциллограммами. Обычно осциллографы показывают только осциллограммы напряжения. Эта форма визуализации показывает изменение напряжения во времени.
Деления, отмеченные на горизонтальной (x) оси, позволяют измерять параметры времени, а на вертикальной (y) оси позволяют измерять значения напряжения.
2. Для каких целей используются осциллографы в автомобильной диагностике?
Осциллограф поможет нам быстро и легко найти проблему. Часто проблема не регистрирует код ошибки (DTC) в соответствующем ECU, код DTC, который можно прочитать с помощью считывателя кодов. Обычно код неисправности записывается при обрыве кабеля или коротком замыкании кабеля на положительный или отрицательный источник питания. Но когда извещатель или механизм перестал работать в каком-то среднем положении, то ошибки не регистрируется. В этом случае, как и при необходимости найти причину, из-за которой зафиксировалась ошибка – автомобильный осциллограф – ваш самый необходимый инструмент.
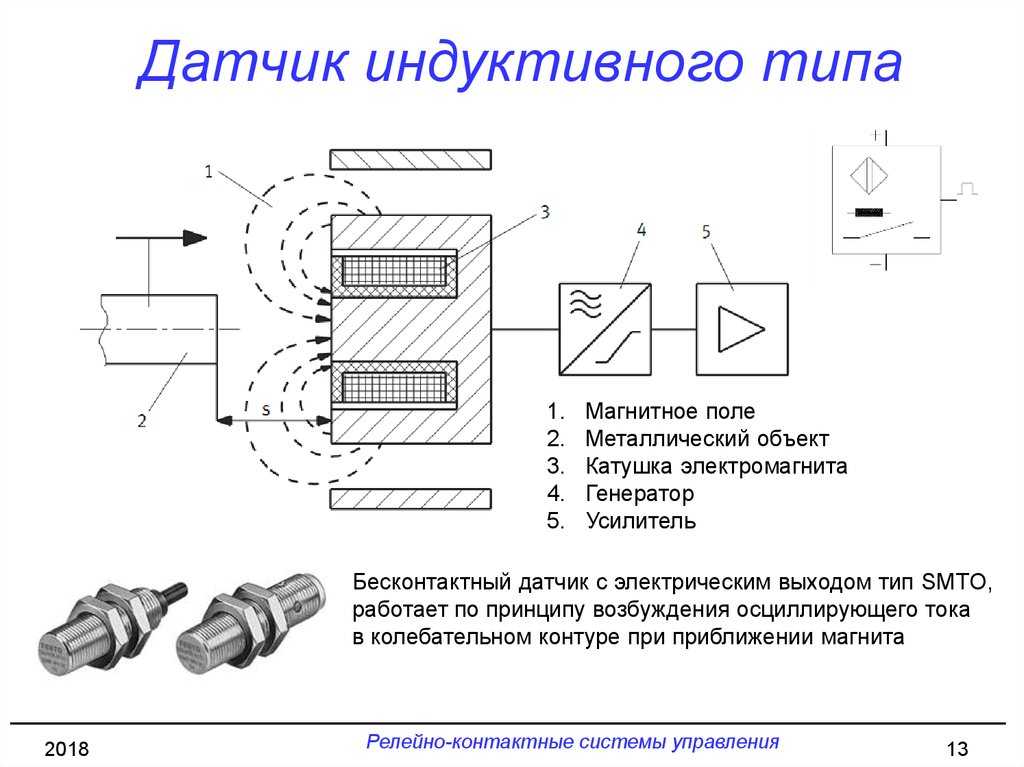
С увеличением количества датчиков, приводов и электрических схем, встроенных в современные автомобили, автомобильный осциллограф стал инструментом, который быстрее и проще диагностирует неисправности в автомобиле. Осциллограф является незаменимым инструментом, когда необходимо наблюдать выходные сигналы индуктивных датчиков, выходные сигналы которых образуют последовательность импульсов, медленно меняющиеся аналоговые сигналы, первичные и вторичные цепи зажигания, абсолютное давление во впускном коллекторе, формы пусковых токов, зарядные токи и и т. д.
д.
3. Какие типы осциллографов существуют?
Аналоговый осциллограф
С ЭЛТ-экранами. Они показывают подробные графики и обычно могут отображать высокие частоты, но не подходят для наблюдения за короткими процессами, повторяющимися в течение длительного интервала времени, или относительно медленными процессами, такими как в автомобиле.
Цифровой запоминающий осциллограф
Наблюдаемый результат цифрового запоминающего осциллографа почти идентичен аналоговому, но сигнал, отображаемый на DSO, может быть «заморожен» на экране, сохранен на жестком диске ПК и использоваться позже или распечатываться. Кроме того, может быть сохранен только текущий «экран», отображаемый на мониторе, а последовательность из многих экранов может быть позже открыта и просмотрена во времени как анимация. Любой экран, сохраненный в рабочем файле, можно распечатать.
Существует два типа цифровых осциллографов: независимые, которые являются внешними устройствами, и осциллографы для ПК. Осциллографы на базе ПК представляют собой новый тип «осциллографов», который состоит из специализированной платы сбора сигналов, которая может быть внешним USB-устройством или устройством с параллельным портом, либо внутренней дополнительной картой PCI или ISA.
Осциллографы на базе ПК представляют собой новый тип «осциллографов», который состоит из специализированной платы сбора сигналов, которая может быть внешним USB-устройством или устройством с параллельным портом, либо внутренней дополнительной картой PCI или ISA.
Осциллографы с одной, двумя и несколькими трассами
В зависимости от количества измерительных входов как аналоговые, так и цифровые осциллографы можно разделить на 3 типа: осциллографы с одной трассой, с двумя трассами и с несколькими трассами.
Осциллографы универсальные и специализированные
В зависимости от назначения осциллографы делятся на 2 группы – универсальные и специализированные. При ремонте автомобилей анализатор зажигания используется для отображения искровых сигналов для каждого цилиндра. Таким образом, специализированные автомобильные осциллографы также используются для проверки форсунок, ABS, датчика O2, быстрой проверки компрессии, топливного насоса, шины CAN и многого другого.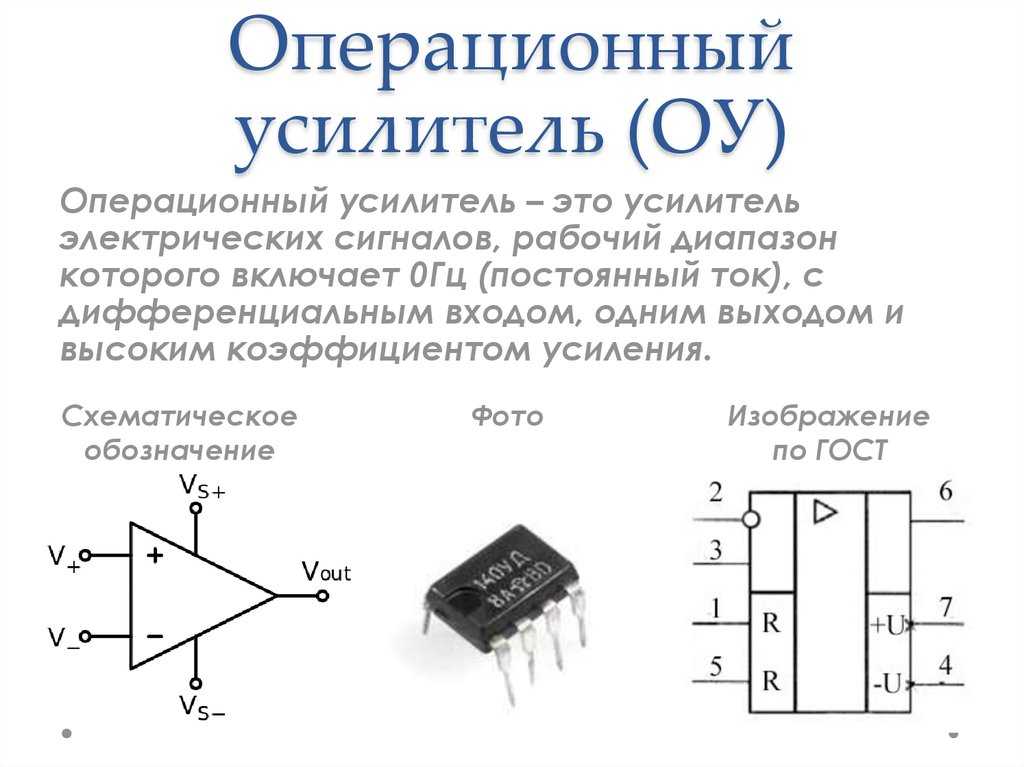 Motortester — специализированный автомобильный осциллограф.
Motortester — специализированный автомобильный осциллограф.
4. Что такое универсальный осциллограф?
Универсальный осциллограф представляет собой электронный измерительный прибор, предназначенный только для наблюдения электрического напряжения во времени. На экране осциллографа отображаются изменения одного или нескольких входных сигналов с течением времени на XY-дисплее, что позволяет учитывать амплитуду и форму напряжения, а также проводить измерения фазы и частоты сигнала.
Для наблюдения осциллографом других физических параметров, а также для наблюдения напряжений за пределами его исходных диапазонов используются различные типы дополнительных приспособлений и преобразователей, которые преобразуют заданный вход в напряжение.
5. Чем мотортестер отличается от лабораторного прибора?
Мотортестер — это один из видов специализированных осциллографов, используемых для диагностики автомобилей.
Основное различие между мотортестером и универсальным осциллографом заключается в том, что мотортестер способен визуализировать кратковременные процессы, такие как процесс зажигания искры. Этот процесс исключительно быстр, а период повторения воспламенения искр во времени во много раз превышает время существования самой искры. Это легко заметить при тестировании двигателя на холостом ходу, когда проводится большинство измерений.
Этот процесс исключительно быстр, а период повторения воспламенения искр во времени во много раз превышает время существования самой искры. Это легко заметить при тестировании двигателя на холостом ходу, когда проводится большинство измерений.
Например: если мы наблюдаем цикл зажигания 4-цилиндрового бензинового двигателя и искру зажигания, которая длится около 2 мс при 800 об/мин, период времени между искрами на одном цилиндре составит 150 мс. Это означает, что «длина» искры будет составлять около 2% фактического рабочего цикла, и поэтому горение искры будет видно в виде очень тонких линий на экране осциллографа, и никакой информации о видны фазы зажигания. Из-за этого многие диагносты вынуждены увеличивать обороты двигателя, тем самым сокращая цикл зажигания и тем самым «насыщая» форму волны цикла.
Мотортестер показывает все цилиндры одновременно и позволяет подробно наблюдать за периодом времени, который включает в себя: период выдержки, напряжение сверления, время горения и турбулентность напряжения.
Большинство мотортестеров могут отображать графики цилиндров рядом друг с другом или друг под другом, исключая длительные периоды времени между искрами, этот метод также известен как «парад».
Еще одной отличительной особенностью мотортестера является то, что он может отображать свое деление времени по горизонтальной оси (х) как в миллисекундах, так и в градусах – до 720 градусов.
6. Функции, позволяющие использовать осциллографы на базе ПК для автоматической диагностики.
Более низкая стоимость по сравнению с автономным осциллографом, если у пользователя уже есть ПК.
Простой экспорт данных в стандартное программное обеспечение ПК, такое как электронные таблицы и текстовые процессоры.
Программное обеспечение устройства можно установить непосредственно на ПК и обновить с помощью компакт-диска или напрямую загрузить из Интернета, не отправляя устройство обратно производителю.
Использование функций дискового хранилища ПК, которые стоят намного дороже при добавлении к автономному осциллографу. 9ПК 0390 обычно имеют большие цветные дисплеи с высоким разрешением, которые легче читать, чем дисплеи меньшего размера, используемые в обычных осциллографах. Цвет можно использовать для различения сигналов. Осциллограф USB на базе ПК
9ПК 0390 обычно имеют большие цветные дисплеи с высоким разрешением, которые легче читать, чем дисплеи меньшего размера, используемые в обычных осциллографах. Цвет можно использовать для различения сигналов. Осциллограф USB на базе ПК
получает питание от порта USB, поэтому внешний источник не требуется.
USB-осциллограф, как и любое другое USB-устройство, можно включать/выключать, не выключая/включая компьютер.
7. Сколько входных каналов необходимо при проведении измерений в автодиагностике
При наблюдении сигналов от датчиков, клапанов, первичной цепи зажигания, вторичной цепи зажигания и т.п. требуется не более одного канала. Первые виды мотортестеров, которые были аналоговыми, нуждались в более чем одном канале, чтобы одновременно отображать однородные сигналы на экране, чтобы их можно было сравнивать друг с другом. Но с DSO на основе PS это стало ненужным, потому что стандартную форму волны можно сохранить на жестком диске ПК и открыть в любое время для сравнения с наблюдаемой в данный момент.
Два канала необходимы, когда необходимо измерить последовательность во времени между двумя сигналами и сколько миллисекунд между ними. Другими словами, второй канал используется, когда необходимо наблюдать и измерять разность фаз между двумя сигналами. Примером такого измерения является одновременное наблюдение сигналов от датчика положения коленчатого вала и датчика положения распределительного вала.
Использование более 2-х каналов в некоторых случаях более удобно, но бессмысленно с функциональной точки зрения.
8. Где можно найти осциллограммы, используемые для сравнения?
Большинство программ, содержащих техническую информацию об автомобилях, имеют разделы, заголовки которых содержат слова «осциллограмма», «шаблон» и «трассировка». Другими словами, эти разделы содержат наборы стандартных сигналов. Такими программами являются Autodata, Vivid Workshop и многие другие, содержащие техническую информацию об автомобилях. Глядя на «волну» на экране, нельзя забывать, что это обычная система координат, подобная той, которую все учили в школе. Как и любая система координат, она имеет горизонтальную ось (x) и вертикальную ось (y). Вертикальная ось (высота) представляет напряжение, а горизонтальная (ширина) представляет время. Масштаб обеих осей может быть изменен.
Как и любая система координат, она имеет горизонтальную ось (x) и вертикальную ось (y). Вертикальная ось (высота) представляет напряжение, а горизонтальная (ширина) представляет время. Масштаб обеих осей может быть изменен.
9. Как работать с осциллографом?
Все осциллографы имеют дисплей, на котором отображается осциллограмма. Экран может быть электронно-лучевой трубкой, ЖК-панелью; также можно использовать монитор ПК. Здесь показан типичный экран осциллографа.
Дисплей прицела
На экране есть деления; они позволяют визуально измерять параметры сигналов. С делениями по горизонтальной оси время измеряются параметры сигнала. Вертикальные деления используются для измерения силы напряжения .
Шкала «времени» может варьироваться от долей секунды до нескольких секунд. Шкала «напряжения» может варьироваться от нескольких мВ до нескольких кВ.
Графики, отображаемые на экране, называются сигналами. Осциллограф может наблюдать только формы сигналов, создаваемые электрическим напряжением. На экране осциллографа отображается растянутое во времени изображение электрических колебаний с учетом формы и амплитуды напряжения, а также измерения фазы и частоты.
Осциллограф может наблюдать только формы сигналов, создаваемые электрическим напряжением. На экране осциллографа отображается растянутое во времени изображение электрических колебаний с учетом формы и амплитуды напряжения, а также измерения фазы и частоты.
Для большинства измерений требуются только 2 щупа, например мультиметр. Заземляющий кабель зонда должен быть подключен к отрицательной стороне автомобильного аккумулятора или шасси, а другой кабель должен быть подключен к кабелю, сигнал которого мы хотим проверить.
Основная терминология при работе с осциллографами
«Нулевая» линия
Если к осциллографу не подключен источник электрического тока, осциллограмма изображается прямой линией. Эта линия называется «нулевой», потому что она представляет собой уровень, соответствующий напряжению 0 В на входе осциллографа.
Осциллограмма – нет сигнала на входе осциллографа.
(Синяя линия — это нулевая линия)
Положение нулевой линии может быть смещено по вертикали в соответствии с геометрическим центром экрана. Необходимость перемещения нулевой линии по вертикали зависит от вида и формы сигнала, как и в случаях использования многоканального осциллографа для лучшей визуализации сигналов более чем одного канала.
Когда мы подключаем источник постоянного тока (DC) к осциллографу, форма волны, которую мы наблюдаем, будет прямой линией. Сама линия будет вертикально смещена от нулевой линии. Разница между наблюдаемой формой волны и нулевой линией пропорциональна величине электрического тока.
Осциллограмма тока автомобильного аккумулятора 12 В
Осциллограмма напряжения автомобильного аккумулятора.
(Выбран режим «только положительные значения тока»)
Большинство осциллограмм имеют форму, отличную от прямой линии.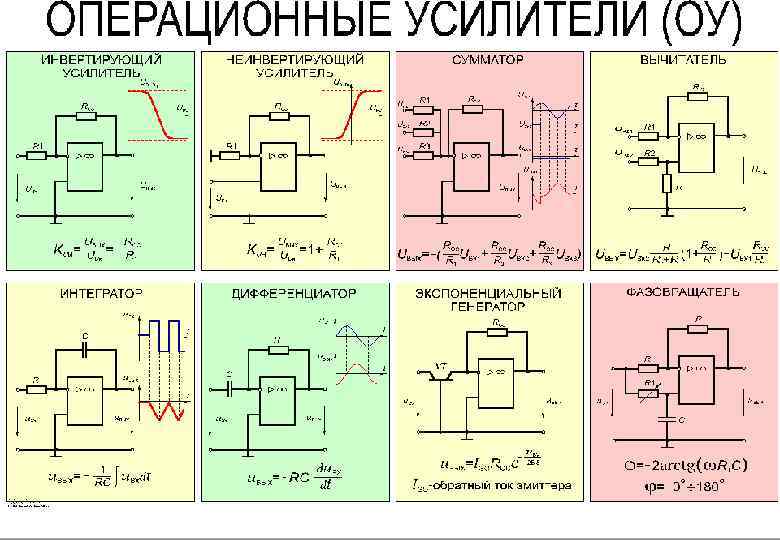
Вертикальная чувствительность
График на экране осциллографа показывает зависимость между значениями напряжения и времени. Если амплитуда входного напряжения больше, необходимо установить более высокий диапазон вертикального усилителя. В зависимости от амплитуды сигнала для лучшего визуального результата используется соответствующий вертикальный усилитель. Возможность изменения масштаба усиления сигнала позволяет осциллографу отображать как сигналы с очень высокой амплитудой, так и сигналы с очень низкой амплитудой. Соответствующее значение усиления зависит от амплитудных параметров наблюдаемого сигнала. Один и тот же сигнал будет отображаться по-разному в зависимости от степени усиления. Больший диапазон используется, когда необходимо показать амплитуду всего сигнала. Меньший диапазон используется, когда необходимо провести детальное наблюдение за формой и амплитудными параметрами отдельных участков сигнала. В таких случаях, когда сигнал более высокого напряжения, на экране видна только часть сигнала.
Элементы управления временной разверткой
Осциллограф строит график напряжения слева направо, начиная с левой стороны экрана. Они выбирают горизонтальную скорость точки при создании трассы; этот процесс обычно называют разверткой. Во всех осциллографах скорость развертки выбирается и калибруется в единицах времени на одно крупное деление координатной сетки. Обычно предоставляется довольно широкий диапазон скоростей развертки, от секунд до пикосекунд (в самых быстрых прицелах) на деление. Как упоминалось выше, развертка измеряется в секундах. В автомобильных измерениях чаще используются миллисекунды (мс) – 1 мс=1/1000 с. Значение развертки можно изменить с помощью переключателя времени. Один и тот же сигнал отображается по-разному в зависимости от выбранной настройки развертки. Меньший период времени выбирают, когда необходимо детальное наблюдение за формой и временными параметрами отдельных участков сигнала. В таких случаях на экране отображается очень короткий фрагмент сигнала. Если нам необходимо наблюдать больший временной фрагмент сигнала (например, при отображении отдельных импульсов с неправильной формой сигнала или пропуска импульсов), используется большая развертка.
Если нам необходимо наблюдать больший временной фрагмент сигнала (например, при отображении отдельных импульсов с неправильной формой сигнала или пропуска импульсов), используется большая развертка.
Основные типы развертки
Элементы управления запуском развертки — Синхронизация
Синхронизация необходима для стабилизации изображения сигнала на экране. Синхронизация предусматривает, что прорисовка каждого отдельного сигнала начинается с одной и той же точки на экране. Момент, когда начинается прорисовка нового экрана, называется «запускающим» моментом. Из-за этого изображение на экране неподвижно или относительно стабильно. Когда синхронизация не активна, что может быть результатом неправильной настройки синхронизации, сигнал воспринимается как мешанина.
Осциллограф не синхронизирован – хаотичная индикация
Для правильной настройки синхронизации необходимо установить следующее:
- Регулятор уровня устанавливает пороговое напряжение.
 Пороговое напряжение — это значение напряжения, при котором осциллограф начинает рисовать.
Пороговое напряжение — это значение напряжения, при котором осциллограф начинает рисовать. - Регулятор уклона выбирает направление (отрицательное или положительное).
Типы синхронизации:
Автоматический режим развертки — Этот режим используется при измерении периодически повторяющихся во времени сигналов. При использовании многоканальных осциллографов необходимо выбрать сигнал, который будет синхронизироваться. Также необходимо выбрать уровень синхронизации сигнала — падающий или нарастающий фронт.
Одиночные развертки — Этот режим используется при наблюдении сигналов, состоящих из импульсов одинаковой формы. Временные интервалы между импульсами могут быть одинаковыми или различаться. Этот режим также используется при одиночном импульсе на входном сигнале. Надо снова выбрать уровень синхронизации – падающий или нарастающий фронт.
Внешний триггер — Для использования этого режима осциллограф должен иметь дополнительный вход для внешней синхронизации. Автомобильные осциллографы обычно имеют сигнал синхронизации зажигания, подключенный к этому входу (цилиндр № 1).
Автомобильные осциллографы обычно имеют сигнал синхронизации зажигания, подключенный к этому входу (цилиндр № 1).
Управление задержкой — Эта функция очень полезна, когда необходимо наблюдать сложные сигналы, состоящие из нескольких частот. Для того, чтобы эти сигналы синхронизировались на экране осциллографа, в приборе должна быть функция «Удержание триггера». На приведенных ниже примерах эта функция представлена ползунком в разделе управления синхронизацией.
Пример сигнала, для которого требуется настройка задержки, чтобы отображение сигнала было стабильным.
Предзапуск
Это метод визуализации сигнала на цифровом осциллографе, который помогает детально наблюдать определенные части сигнала перед синхронизацией сигнала (до запуска). В аналоговых осциллографах такого понятия нет. Предварительная визуализация возможна благодаря тому, что при преобразовании сигнала в цифровые данные часть значений сохраняется в буферной памяти. После синхронизации сигнала значения, хранящиеся в буферной памяти, могут отображаться на экране.
После синхронизации сигнала значения, хранящиеся в буферной памяти, могут отображаться на экране.
10. Какие типы электрических сигналов существуют и каковы их параметры?
Постоянный и переменный ток
Постоянный ток (DC) представляет собой однонаправленный поток электрического заряда. Может быть положительным или отрицательным. Постоянный ток производят такие источники, как батареи и электрические машины типа динамо. Также можно получить от источника переменного тока с помощью устройства переключения тока, называемого выпрямителем. На картинке ниже показан ток автомобильного аккумулятора
Волна, создаваемая автомобильным аккумулятором
Другим примером гораздо более сложной природы постоянного тока является выпрямленный ток генератора. Этот ток положительный, но он также пульсирует. Эти пульсации дополнительно усиливаются тем, что в приведенном ниже примере имеется поврежденный диод в выпрямительном мосту.
Пример сложного постоянного напряжения
Переменный ток (AC) — В переменном токе движение электрического заряда периодически меняет направление. В постоянном токе (DC) поток электрического заряда только в одном направлении. Сигнал колеблется около 0В. Его мгновенная стоимость может быть как положительной, так и отрицательной. Такими напряжениями являются практически все сигналы индуктивных датчиков: датчик CKP, датчик CMP, сигнал датчика ABS и т. д.
Напряжение в электрической цепи также переменного тока и имеет синусоидальную форму. Все примеры, рассмотренные в разделе «Периодические и непериодические сигналы», также являются примерами переменных сигналов.
Периодические и непериодические сигналы
Сигнал является периодическим, если величины его пульсаций напряжения и форма этих пульсаций одинаковы и повторяются через равные промежутки времени.
Время, необходимое для того, чтобы один периодический сигнал завершил один полный цикл, называется период .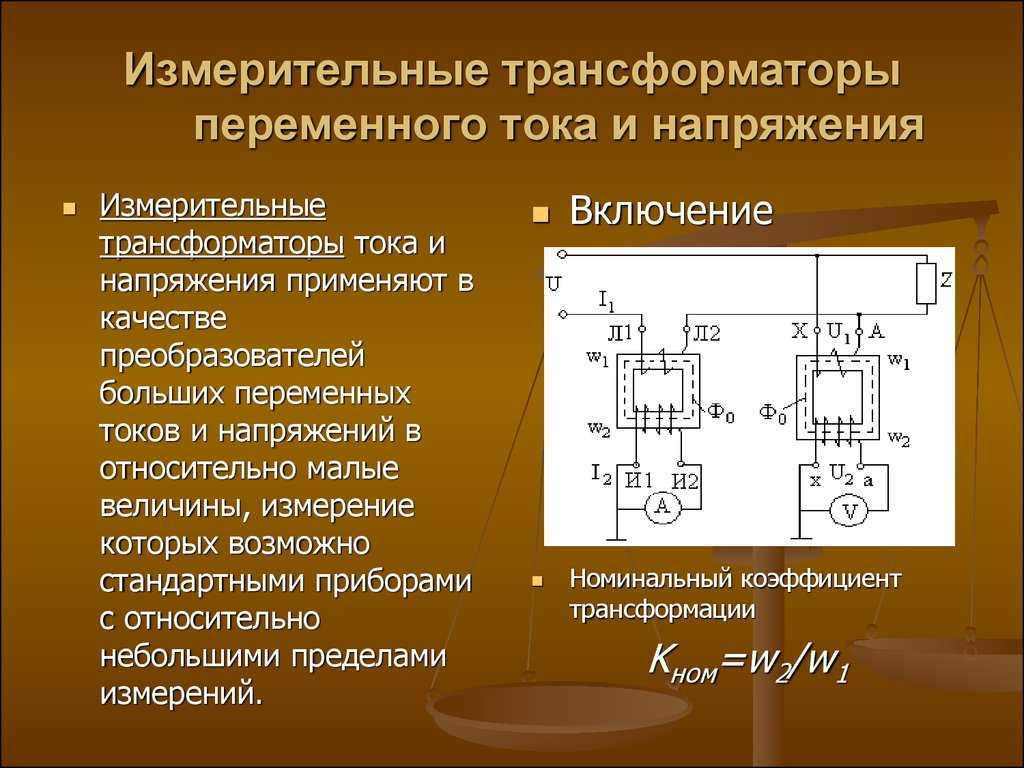 Число периодов в секунду называется частотой сигнала. Если осциллограмма напряжения периодического сигнала пересекает «нулевую» линию, сигнал называется переменным сигналом. Если сигнал не пересекает «нулевую» линию, сигнал является постоянным. Примеры осциллограмм различных периодических сигналов показаны ниже.
Число периодов в секунду называется частотой сигнала. Если осциллограмма напряжения периодического сигнала пересекает «нулевую» линию, сигнал называется переменным сигналом. Если сигнал не пересекает «нулевую» линию, сигнал является постоянным. Примеры осциллограмм различных периодических сигналов показаны ниже.
Периодический синусоидальный сигнал
Первый показанный сигнал является синусоидальным. Этот сигнал характеризуется двумя параметрами – амплитудой и частотой. В автомобильной электронике аналогом синусоидального сигнала являются сигналы, генерируемые индуктивными датчиками скорости и положения. Аналогичные сигналы генерируют некоторые датчики положения коленчатого вала (ДКП), датчики положения распредвала (ДКП), датчики скорости автомобиля (ДСС) и другие.
Квадратичный периодический сигнал
Сигнал управления форсункой прямоугольный, аналогичный показанному выше.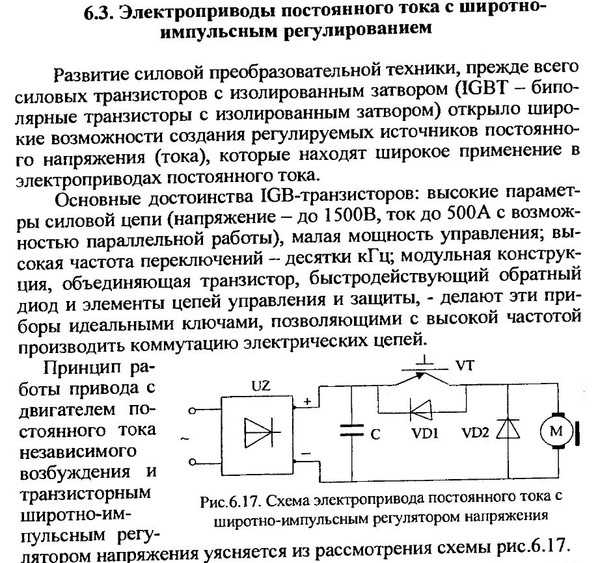 Его импульсы периодически повторяются.
Его импульсы периодически повторяются.
Треугольный периодический сигнал
Сигналы, не повторяющиеся через равные промежутки времени, называются непериодическими.
Непериодический переменный сигнал
Примером непериодических сигналов является передача цифровых данных между автомобилями и различными контроллерами. Есть еще один тип непериодических сигналов – одиночные сигналы. Это своего рода сигнал, представленный одиночным импульсом, который может никогда не повторяться или может повторяться через длительный промежуток времени.
Есть еще один тип сложных сигналов, которые могут быть как периодическими, так и непериодическими. Эти сигналы таковы, что включают в себя более 1 частоты. Пример такого сигнала показан на следующем рисунке:
Для синхронизации такого сигнала на экране осциллографу нужна специализированная функция «Удержание триггера» .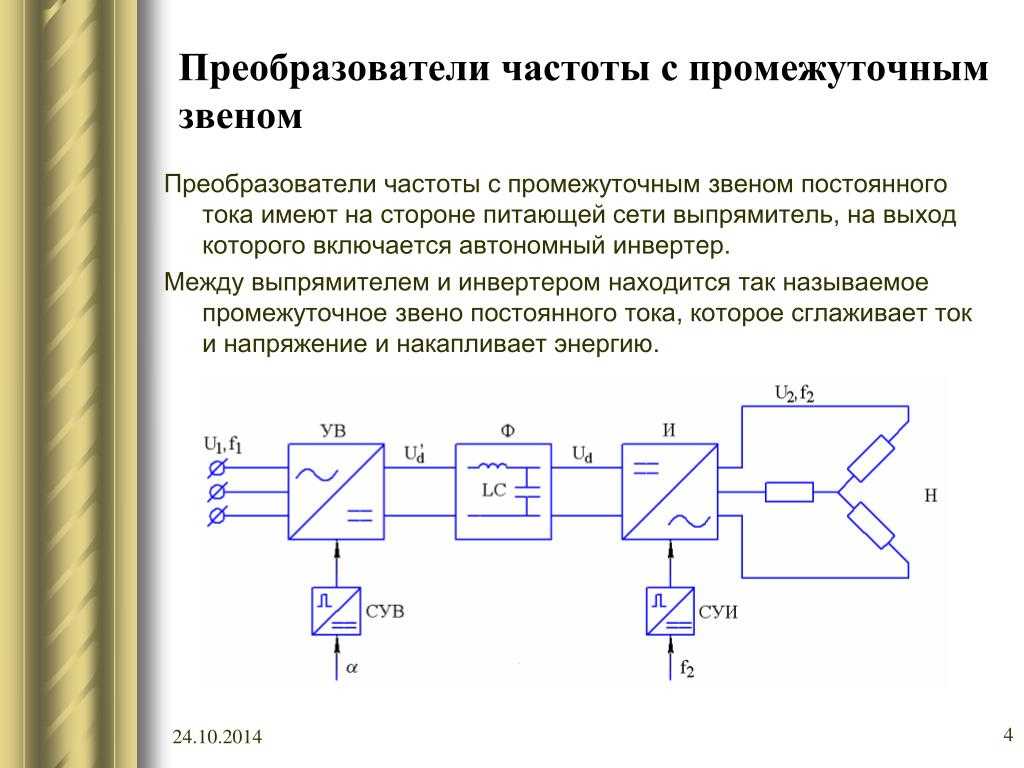
(* См. раздел «Синхронизация»)
Медленно-переменный сигнал
Одним из самых больших преимуществ цифрового осциллографа является возможность отображать волны процессов с большим периодом, то есть сигналы, которые медленно изменяются во времени. Примером такого сигнала является форма волны на следующем рисунке.
Медленно-переменный сигнал
Аналоговые и цифровые сигналы
Все исследованные до сих пор сигналы являются аналоговыми сигналами, это непрерывные сигналы. Значения их напряжения изменяются во времени по какому-то закону или случайным образом. В качестве примера сложного аналогового сигнала можно привести сигнал лямбда-зонда (датчика кислорода).
Форма волны цифровых сигналов переключается между двумя уровнями напряжения, представляющими два состояния логического значения (0 и 1), даже если это аналоговая форма волны напряжения, поскольку она интерпретируется с точки зрения только двух уровней — высокого и низкого, включить и выключить.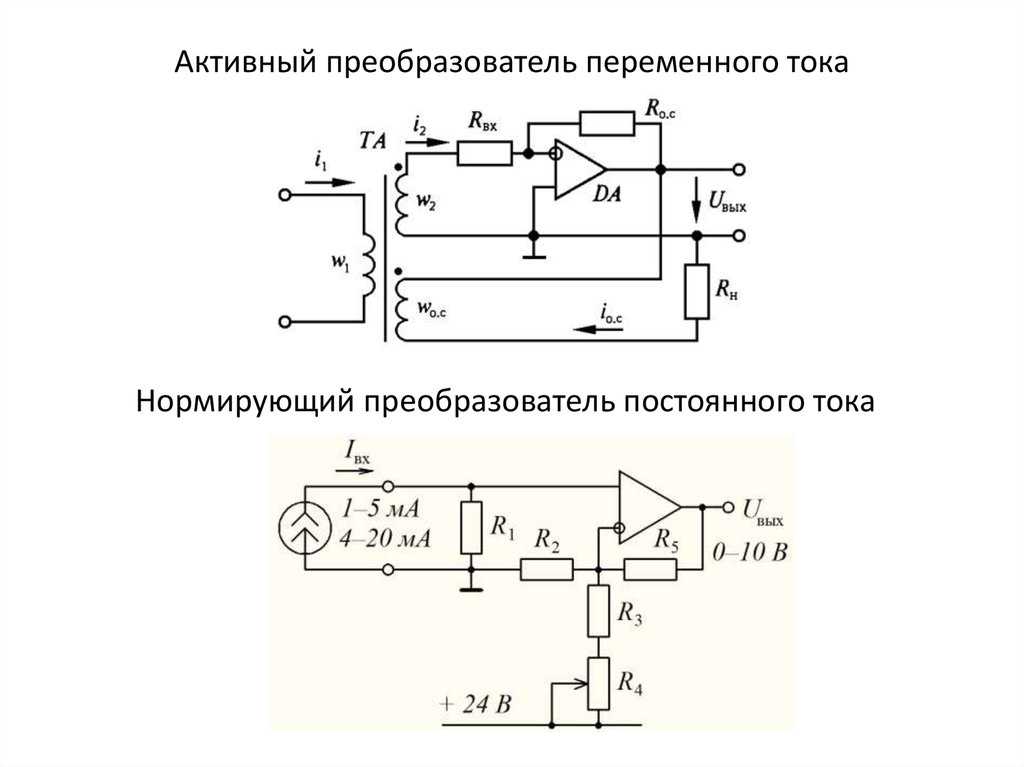 Такие уровни напряжения называются логическими уровнями напряжения. В большинстве случаев логические уровни имеют постоянные значения напряжения: например, +5В и 0В.
Такие уровни напряжения называются логическими уровнями напряжения. В большинстве случаев логические уровни имеют постоянные значения напряжения: например, +5В и 0В.
Цифровые сигналы генерируются переключателями. Эти переключатели представлены транзисторами, переключающимися между состояниями «открыто/закрыто». Иногда цифровые сигналы генерируются механическими переключателями, электромеханическими реле. Примером цифровых сигналов в автомобильной электронике являются датчик Холла, датчики крайнего положения дроссельной заслонки; датчик положения закрытой дроссельной заслонки (CTPS), датчик широко открытой дроссельной заслонки (WOT) и сигналы передачи данных между различными ЭБУ. Как и аналоговые сигналы, цифровые сигналы могут быть периодическими и непериодическими.
Частота
Частота — это количество повторений события в единицу времени. Единицей частоты в системе СИ является герц (Гц), определяемый как один цикл в секунду. В автомобильной электронике измеряется число оборотов двигателя в минуту – (RPM). Используя форму напряжения периодического сигнала, мы можем легко вычислить частоту сигнала. Для этого нам нужно измерить период (длительность полного цикла сигнала). Полученное значение можно пересчитать в частоту по соответствующей формуле.
Используя форму напряжения периодического сигнала, мы можем легко вычислить частоту сигнала. Для этого нам нужно измерить период (длительность полного цикла сигнала). Полученное значение можно пересчитать в частоту по соответствующей формуле.
Рассмотрим следующий пример. Датчик генерирует 1 импульс напряжения за один оборот коленчатого вала. Промежуток времени между двумя импульсами называется периодом. В данном случае 2 последовательных импульса разделены 7,4 делениями экрана осциллографа. Масштаб экрана, используемый для визуализации этого сигнала, составляет 1 деление, равное 100 мс или 1/100 секунды, таким образом, период сигнала составляет 0,74 секунды. Зная длину периода сигнала, мы можем вычислить, сколько циклов в секунду, следовательно, частота сигнала в Гц. При преобразовании периода в частоту нам нужно разделить выбранный период времени (в нашем случае 1 секунду) на длину периода сигнала (в нашем случае 0,74 секунды):
1/0,074 = 13,5 Гц
Если в этом случае мы посчитаем количество повторяющихся периодов в минуту, то получим частоту вращения коленчатого вала в об/мин. При преобразовании периода в частоту в об/мин нам нужно разделить выбранный период времени (60 секунд) на длину периода сигнала (0,74 секунды)
При преобразовании периода в частоту в об/мин нам нужно разделить выбранный период времени (60 секунд) на длину периода сигнала (0,74 секунды)
60/0,074 = 810 об/мин
Такие расчеты можно сделать используя все виды сигналов с разными масштабами деления, но некоторые осциллографы могут напрямую показывать результаты в RPM.
Ширина импульса
Ширина импульса – это промежуток времени, в течение которого сигнал находится в активном состоянии. Активное состояние – это уровень напряжения, запускающий исполнительный механизм. В зависимости от того, как подключен исполнительный механизм, активное состояние может иметь разные уровни напряжения: 0В, +5В, +12В. Практически уровень может колебаться вокруг этих значений. Например: активное состояние сигнала управления форсунками в большинстве систем управления двигателем имеет напряжение 0В, но практически может варьироваться в диапазоне от 0В до +2,5В и более.
Рабочий цикл
Рабочий цикл — это доля времени, в течение которого система находится в «активном» состоянии. Например, в идеальной последовательности импульсов (с прямоугольными импульсами) рабочий цикл равен длительности импульса, деленной на период импульса. Для последовательности импульсов с длительностью импульса 1 мкс и периодом импульса 4 мкс коэффициент заполнения равен 0,25. Рабочий цикл прямоугольной волны составляет 0,5 или 50%. Этот период является одним из параметров сигнала ШИМ (широтно-импульсная модуляция).
Например, в идеальной последовательности импульсов (с прямоугольными импульсами) рабочий цикл равен длительности импульса, деленной на период импульса. Для последовательности импульсов с длительностью импульса 1 мкс и периодом импульса 4 мкс коэффициент заполнения равен 0,25. Рабочий цикл прямоугольной волны составляет 0,5 или 50%. Этот период является одним из параметров сигнала ШИМ (широтно-импульсная модуляция).
ШИМ-сигнал используется для управления некоторыми исполнительными механизмами. Например, в некоторых системах управления двигателем ШИМ-сигнал управляет электромагнитным клапаном холостого хода. Кроме того, некоторые датчики также генерируют ШИМ-сигнал, который преобразует измеренный физический параметр в прямую корреляцию с периодом возгорания.
11. Что такое самоиндукция?
Это понятие напрямую не связано с принципом работы осциллографа, но важно понимать, почему при срабатывании индуктивных исполнительных датчиков на автомобильном напряжении 12В мы получаем напряжения в пределах от 60В до 200В и в первичной цепи зажигания вверх до 400В-500В.
Самоиндукция — Это происходит, когда ток в индуктивной цепи изменяется и магнитное поле перерезает провода; эта индуцированная электродвижущая сила противодействует изменению тока, ограничивая его, если ток увеличивается, и усиливая его, если ток уменьшается.
Обратное напряжение самоиндукции — Это обратное напряжение, создаваемое самоиндукцией. Эта индуцированная электродвижущая сила противодействует изменению тока, ограничивая его, если ток увеличивается, и усиливая его, если ток уменьшается.
При скорости изменения магнитного поля в соленоиде (соленоид реле, соленоид форсунки, катушка зажигания, индуктивный датчик обнаружения вращения) обратное напряжение самоиндукции может достигать тысяч вольт. Величина обратного напряжения в основном зависит от индуктивности катушки и скорости изменения величины магнитного поля. В электромагнитных исполнительных механизмах величина магнитного поля изменяется быстрее всего при затухании поля после быстрого отключения питающего напряжения. В некоторых случаях эффект самоиндукции является нежелательным, и принимаются меры предосторожности для его уменьшения или устранения. Но некоторые электрические цепи предназначены для создания максимального обратного напряжения самоиндукции, например, система зажигания бензинового двигателя. Некоторые системы зажигания могут создавать обратное напряжение самоиндукции до 40–50 кВ. Такие напряжения можно легко измерить автомобильным осциллографом с помощью емкостного датчика.
В некоторых случаях эффект самоиндукции является нежелательным, и принимаются меры предосторожности для его уменьшения или устранения. Но некоторые электрические цепи предназначены для создания максимального обратного напряжения самоиндукции, например, система зажигания бензинового двигателя. Некоторые системы зажигания могут создавать обратное напряжение самоиндукции до 40–50 кВ. Такие напряжения можно легко измерить автомобильным осциллографом с помощью емкостного датчика.
Датчики перемещения/датчики измерения
Что такое датчик смещения?
Датчик смещения — это устройство, которое измеряет расстояние между датчиком и объектом, определяя величину смещения различных элементов и преобразовывая ее в расстояние. В зависимости от того, какой элемент используется, существует несколько типов датчиков, таких как оптические датчики смещения, линейные датчики приближения и ультразвуковые датчики смещения.
- Верх страницы
Что такое измерительный датчик?
Измерительный датчик — это устройство, которое измеряет размеры объекта путем преобразования изменений количества света в электрические сигналы, когда объект прерывает широкий лазерный луч.
- Верх страницы
Характеристики
1. Физическую величину объекта можно измерить.
Датчик смещения измеряет и обнаруживает изменения (смещение) физической величины.
Датчик может измерять высоту, ширину и толщину объекта, определяя величину смещения этого объекта.
Датчик измерения измеряет положение и размеры объекта.
2. Помимо вывода сигнала ВКЛ/ВЫКЛ также возможен вывод физической величины.
Аналоговый вывод физических величин (выход по току или выход по напряжению) также может быть выполнен (за исключением некоторых моделей).
Некоторые модели также поддерживают цифровую (последовательную) связь.
- Верх страницы
Принципы работы и классификация
Датчики смещения
1. Оптические датчики перемещения
Оптические датчики перемещения
Метод измерения триангуляции
В этих датчиках используется система измерения триангуляции.
Некоторые датчики используют PSD, а другие используют устройство формирования изображения (CCD и CMOS) в качестве светоприемного элемента.
• Метод PSD
Свет от источника света конденсируется линзой и направляется на объект.
Свет, отраженный от объекта, конденсируется на одномерном датчике положения (PSD)* принимающей линзой. Если положение объекта (расстояние до измерительного устройства) изменится, позиции формирования изображения на PSD будут другими, и изменится баланс двух выходов PSD.
Если два выхода — A и B, рассчитайте A/(A + B) и используйте соответствующие значения для коэффициента диапазона «k» и смещения «C», как показано ниже.
* PSD: позиционно-чувствительный прибор
• Метод устройства формирования изображения (метод ПЗС и метод КМОП)
По сравнению с датчиком, использующим метод PSD, датчик, использующий КМОП (ПЗС) в качестве светоприемного элемента, обеспечивает более точное измерение смещения без влияния цвета поверхности и текстуры объектов. 908:00 Датчик определяет количество света на отдельных пикселях в КМОП (ПЗС) и преобразует их в расстояние, когда точечный луч, отражающийся от поверхности объекта, проецируется на светоприемный элемент.
908:00 Датчик определяет количество света на отдельных пикселях в КМОП (ПЗС) и преобразует их в расстояние, когда точечный луч, отражающийся от поверхности объекта, проецируется на светоприемный элемент.
Различия между КМОП и ПЗС
ПЗС означает устройство с зарядовой связью, а КМОП означает комплементарный металлоксидный полупроводник.
• Модель регулярного отражения и модель диффузного отражения
Регулярное отражение
Создается зеркальное отражение, например, от зеркального или глянцевого объекта.
Рассеянное отражение
Луч отражается во всех направлениях от объекта со стандартной поверхностью.
Модель регулярного отражения
Свет от объекта принимается путем регулярного отражения, и возможно стабильное измерение металлических и других объектов с глянцевой поверхностью.
Модель диффузного отражения
Луч света проецируется перпендикулярно на поверхность объекта, а рассеянный свет, отраженный назад, принимается для широкой области измерения.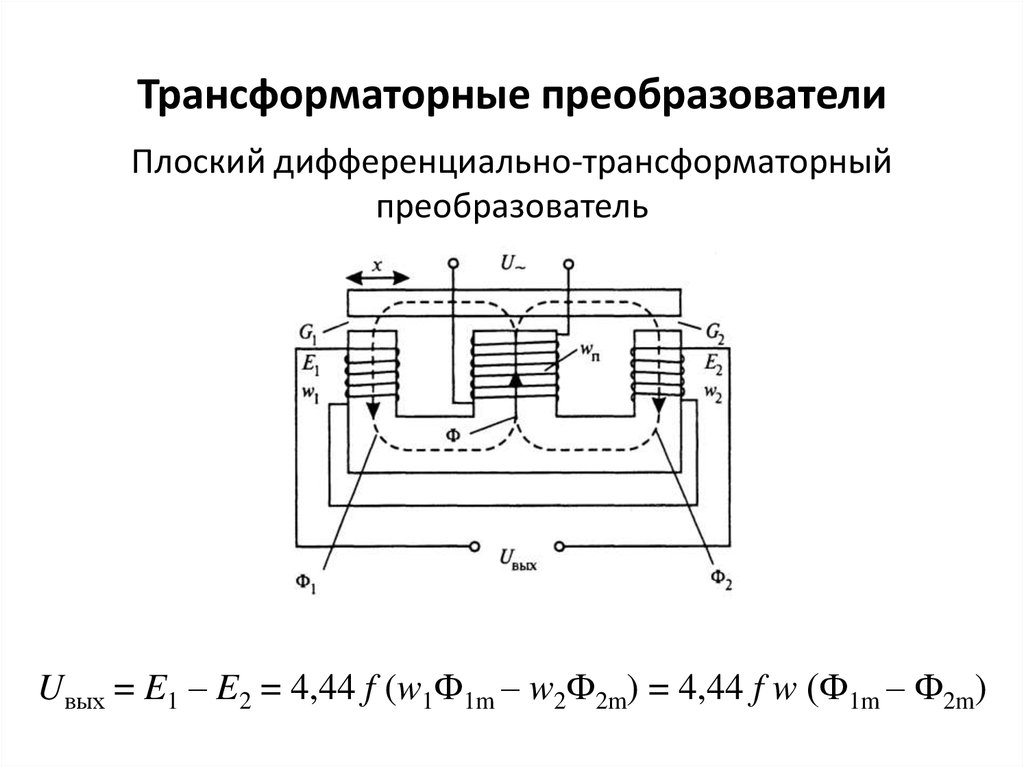
Сенсорные головки с постоянным отражением получают прямой свет от регулярного отражения от объекта. Стабильные измерения могут быть достигнуты для объектов из металла или других материалов с глянцевой поверхностью, но диапазон измерения более узкий, чем у датчиков диффузного отражения. 9Датчики диффузного отражения 0800 используют головку датчика, наклоненную под углом для приема света с правильным отражением. Это позволяет размещать головку датчика на расстоянии от объекта.
• Линейные и точечные лучи
Модель линейного луча
Эта модель измеряет среднее смещение в линейной балке. В зависимости от условий измерения эта модель обеспечивает стабильные измерения, на которые не влияют бугры или неровности на поверхности объекта.
Точечный луч Модель
Данная модель более чувствительна к влиянию неровностей или неровностей поверхности объекта.
Принцип конфокальности
На основе принципа конфокальности излучаемый и принимаемый свет располагаются вдоль одной и той же оси. Свет принимается только тогда, когда он сфокусирован на объекте измерения, что позволяет рассчитать высоту.
Форма полученной световой волны не нарушена материалом или наклоном объекта измерения. Полученная форма светового сигнала всегда стабильна, что позволяет выполнять измерения с высоким разрешением.
• Принцип конфокальности белого света
Белый свет светодиода фокусируется в разных точках для каждого цвета (т. е. длины волны) благодаря специальному набору линз в модуле OCFL в сенсорной головке. В результате возвращается только цвет света, сфокусированного на объекте измерения, что позволяет рассчитать расстояние от головки датчика до объекта измерения на основе цвета отраженного света. Сенсорная головка содержит специальный набор линз, который разделяет белый свет на разные цвета, а контроллер содержит белый светодиодный источник света, а также спектроскоп и процессор, которые преобразуют цвет отраженного света в расстояние. В сенсорной головке нет необходимости в механизме привода линзы или электронных компонентах, даже если они считались стандартными в предыдущих конфокальных моделях. Это обеспечивает гораздо более компактную конструкцию и гораздо большую устойчивость к шуму, чем модели триангуляции и/или предыдущие конфокальные модели.
В сенсорной головке нет необходимости в механизме привода линзы или электронных компонентах, даже если они считались стандартными в предыдущих конфокальных моделях. Это обеспечивает гораздо более компактную конструкцию и гораздо большую устойчивость к шуму, чем модели триангуляции и/или предыдущие конфокальные модели.
Высота определяется на основе длины волны.
Отраженный свет той длины волны, которая была сфокусирована на поверхности объекта измерения, проходит через волокно, и спектроскоп в контроллере преобразует длину волны в расстояние.
Модуль OCFL содержит специальный набор линз, разработанный OMRON, который изменяет точку фокусировки для каждого цвета (т. е. длины волны) белого света. Диаметр пятна одинаков в любом положении в пределах диапазона измерения. Это не меняет того, как это делается для триангуляции. Высокоточная технология изготовления линз позволила нам создать очень маленькую конструкцию линзы, для которой также не требуется приводной механизм.
Примечание: OCFL: объектив Omron с хроматической фокусировкой
Метод световой резки
Широко распространенный лазерный луч проецируется на объект измерения для измерения формы его поперечного сечения.
Ленточный лазерный луч проецируется на объект измерения, и отражение от объекта принимается ПЗС. Профиль формы объекта измерения формируется по принципу треугольного измерения расстояния. 908:00 Поскольку 2D-данные по осям X и Z измеряются одновременно, нет необходимости перемещать ни датчик, ни объект измерения.
2. Линейные датчики приближения
Когда переменный ток проходит через катушку, в катушке возникает магнитный поток. Когда магнитный поток проходит через металлический предмет, он создает вихревые токи, которые генерируют магнитное поле, противодействующее изменениям тока. В результате изменяется индуктивность катушки. Функция между расстоянием от катушки до объекта определяется с точки зрения изменения индуктивности, и можно рассчитать расстояние смещения.
По мере уменьшения расстояния между металлическим объектом и головкой датчика вихревые токи увеличиваются, а амплитуда колебаний колебательного контура уменьшается.
И наоборот, по мере увеличения расстояния между металлическим объектом и головкой датчика вихревые токи уменьшаются, а амплитуда колебаний колебательного контура увеличивается.
Амплитуда колебаний колебательного контура изменяется при изменении положения металлического предмета, поэтому измерения проводятся путем обнаружения этих изменений амплитуды колебаний.
3. Ультразвуковые датчики перемещения
Передатчик посылает ультразвуковые волны к объекту, а приемник принимает обратно от него отраженные волны. Этот тип датчика определяет расстояние, вычисляя соотношение между временем, необходимым для отправки и приема ультразвуковых волн, и скоростью звука.
4. Датчики смещения контактов
Датчик этого типа измеряет смещение посредством прямого контакта измеряемого объекта с датчиком.
Обеспечивает превосходную точность измерения по сравнению с бесконтактными датчиками.
Метод дифференциального трансформатора
Когда головка датчика касается объекта, она давит на движущийся сердечник, и центр сердечника отдаляется от центра катушки, создавая зазор. Когда оба конца соединенных двух катушек возбуждаются переменным током, полное сопротивление обеих катушек изменяется в зависимости от зазора между центром катушки и центром сердечника. Этот зазор (смещение) выводится линейно как дифференциальное напряжение катушек, и поэтому смещение объекта может быть определено путем обнаружения этого дифференциального напряжения.
Типовая модель: ZX-T
Метод магнитного зондирования
Когда головка датчика касается объекта, магнитная шкала с северным и южным полюсами, расположенными попеременно с мелким шагом внутри датчика, перемещается.
Изменение магнитного потока, происходящее в это время, определяется датчиком магнитного сопротивления для определения смещения.
