Как работает частотный преобразователь для асинхронного двигателя. Как правильно выбрать и рассчитать частотник. Можно ли собрать частотный преобразователь своими руками. Какие преимущества дает использование частотного привода.
Что такое частотный преобразователь и зачем он нужен
Частотный преобразователь (частотник) — это устройство для регулирования скорости вращения асинхронного электродвигателя. Основные преимущества использования частотного привода:
- Плавный пуск и остановка двигателя
- Снижение пусковых токов в 5-7 раз
- Экономия электроэнергии до 30-50%
- Точное регулирование скорости вращения
- Защита двигателя от перегрузок
Частотный преобразователь позволяет изменять частоту и амплитуду питающего напряжения, тем самым регулируя скорость вращения асинхронного двигателя в широком диапазоне.
Принцип работы частотного преобразователя
Принцип работы частотного преобразователя заключается в следующем:

- Входное переменное напряжение выпрямляется с помощью диодного моста
- Выпрямленное напряжение сглаживается конденсаторами
- Инвертор на IGBT-транзисторах преобразует постоянное напряжение в переменное с регулируемой частотой и амплитудой
- Микропроцессорная система управления формирует сигналы для инвертора по принципу широтно-импульсной модуляции (ШИМ)
Таким образом, на выходе частотника формируется трехфазное напряжение с изменяемой частотой и амплитудой для питания электродвигателя.
Как выбрать частотный преобразователь для асинхронного двигателя
При выборе частотного преобразователя необходимо учитывать следующие параметры:
- Мощность преобразователя должна быть на 10-15% больше мощности двигателя
- Номинальный ток преобразователя должен быть равен или больше номинального тока двигателя
- Напряжение питания (однофазное 220В или трехфазное 380В)
- Диапазон регулирования частоты (обычно 0-400 Гц)
- Тип управления (скалярное или векторное)
- Наличие необходимых функций защиты и управления
Для точного выбора рекомендуется использовать формулы расчета, приведенные в документации производителя.
Расчет параметров частотного преобразователя
Основные параметры, которые необходимо рассчитать при выборе частотника:
- Номинальный ток преобразователя:
Iном = P / (√3 * U * cosφ)
где P — мощность двигателя, U — напряжение питания, cosφ — коэффициент мощности
- Мощность преобразователя:
Pпч = 1,15 * Pдв
где Pдв — мощность двигателя
Также необходимо учесть перегрузочную способность преобразователя по току (обычно 150% в течение 60 сек).
Схема подключения частотного преобразователя к асинхронному двигателю
Схема подключения частотного преобразователя зависит от типа питающей сети:
- При питании от однофазной сети 220В обмотки двигателя соединяются в треугольник
- При питании от трехфазной сети 380В обмотки соединяются звездой
Подключение производится в следующем порядке:
- Автоматический выключатель
- Частотный преобразователь
- Асинхронный электродвигатель
Обязательно подключение защитного заземления. Для защиты от помех рекомендуется использовать экранированный кабель.
Настройка частотного преобразователя
Настройка частотного преобразователя включает следующие этапы:

- Установка основных параметров двигателя (мощность, номинальный ток, частота и др.)
- Настройка времени разгона и торможения
- Выбор источника управления (местное или дистанционное)
- Настройка диапазона регулирования частоты
- Активация необходимых защитных функций
- Настройка ПИД-регулятора (при необходимости)
Точная последовательность настройки зависит от модели преобразователя и приводится в инструкции по эксплуатации.
Можно ли собрать частотный преобразователь своими руками
Теоретически собрать частотный преобразователь своими руками возможно. Для этого потребуются:
- Диодный мост
- Конденсаторы фильтра
- IGBT-транзисторы
- Драйверы IGBT
- Микроконтроллер
- Датчики тока и напряжения
- Блок питания
Однако на практике самостоятельная сборка частотника нецелесообразна из-за сложности схемы и настройки. Гораздо проще и надежнее приобрести готовый заводской преобразователь.
Область применения частотных преобразователей
Частотные преобразователи широко применяются для управления асинхронными двигателями в различных отраслях:
- Насосное и компрессорное оборудование
- Вентиляционные системы
- Конвейеры и транспортеры
- Станки и промышленное оборудование
- Лифты и подъемники
- Экструдеры и смесители
Наиболее распространены преобразователи для двигателей мощностью 0,75-15 кВт. Для более мощных двигателей используются специализированные промышленные преобразователи.
Преобразователь частоты для асинхронного – схема
Асинхронный двигатель (машина) – это электрический двигатель, частота вращения которого не совпадает с частотой тока (ЭДС), прикладываемого к статору.
Рис. 1. Асинхронный двигатель
К преимуществам таких двигателей можно отнести их низкую стоимость, простоту изготовления и эксплуатации, а также возможность прямого включения (без регулирования или преобразования питающего тока). Есть у них и недостатки: высокие требования к пусковому току, сложная регулировка оборотов, низкий коэффициент мощности и др.
Здесь стоит отметить, что асинхронные двигатели рассчитаны на работу только с трехфазным напряжением, только в этом случае не требуются никакие преобразователи.
Однако, в быту часто требуется запитать асинхронный двигатель от обычной сети переменного тока с одной фазой, и именно здесь кроется основная проблема.
Необходимость использования частотного преобразователя
Есть несколько способов управления асинхронным двигателем, и один из них – регулировка частоты.
Изменяя частоту питающего тока, вы меняете частоту вращения двигателя, можете запустить его или наоборот – остановить.
В качестве преобразователя напряжения наибольшее распространение нашли инверторные схемы. Они обеспечивают широкий диапазон регулировки частот, обладают высоким КПД и другими отличными техническими характеристиками.
Схему работы инверторов можно изобразить следующим образом.
Рис. 2. Схема работы инверторов
Однофазное переменное напряжение преобразуется в постоянное, подается в блок с импульсным инвертором, который формирует три независимых переменных напряжения (одинакового уровня, но со смещенной фазой) — ключа.
Схема инверторного преобразователя для асинхронного двигателя
Преобразователи можно приобрести в готовом виде, а можно изготовить своими руками.
Сложность проектирования и создания таких схем заключается в логике их работы. В настоящее время с приходом программируемых контроллеров Arduino и т. п. имеется возможность создавать сложные схемы с широким диапазоном регулировки частот всех трех питающих напряжений. Однако, для начала рассмотрим простые варианты.
п. имеется возможность создавать сложные схемы с широким диапазоном регулировки частот всех трех питающих напряжений. Однако, для начала рассмотрим простые варианты.
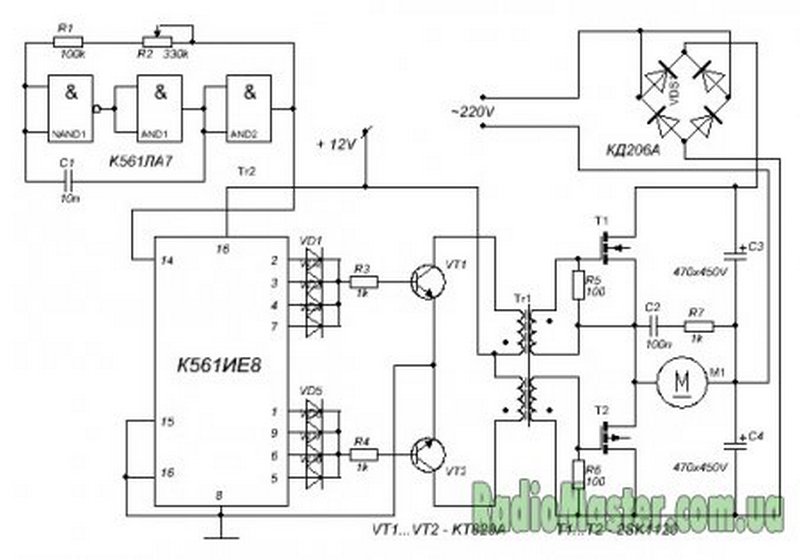
Двигатель ДИД-0.5ТА (напряжение питания около 27 В, частота вращения – до 400 Гц) имеет небольшую мощность и широко применяется в системах автоматики. Чтобы привести его в движение и отрегулировать частоту вращения вала можно использовать следующую схему.
Рис. 3. Схема двигателя
По сути она представляет собой три разделенных генератора частоты (ключа) на базе логических элементов.
За регулировку отвечает резистор R2. Такая схема не подойдет для запуска асинхронных двигателей, работающих от трехфазного напряжения 380 В.
Для этих целей можно использовать адаптированную схему.
Рис. 4. Адаптированная схема
Здесь блоки выходных ключей A2 и А3 изображены схематично, так как полностью дублируют блок А1.
Программировать здесь ничего не нужно.
Более сложные реализации
Многие производители предлагают специальные контроллеры, на базе которых управление асинхронными двигателями существенно упрощается.
Один из таких вариантов – контроллер MC3PHAC.
Рекомендуемая производителем схема подключения.
Рис. 5. Схема подключения
Реализация платы частотного преобразователя может быть, например, такой.
Рис. 6. Реализация платы частотного преобразователя
Обмен данными по последовательному интерфейсу RS232 с персональным компьютером не обязателен. Схема может работать автономно.
Управляющие сигналы и процедуры инициализации можно уточнить в даташите производителя.
Еще один вариант с готовой прошивкой для микроконтроллера
Схема использовалась для питания трехфазного двигателя на пилораме (наверное, самый популярный способ использования трехфазных двигателей).
Рис. 7. Схема для питания трехфазного двигателя
Блок питания к ней.
Рис. 8. Схема блока питания
Вариант печатной платы.
Рис. 9. Печатная плата
Частота может регулироваться в диапазоне 2,5-50 Гц с шагом 1,25. ШИМ – 1700 – 3300 Гц. Мощность двигателя – не более 4 кВт.
ШИМ – 1700 – 3300 Гц. Мощность двигателя – не более 4 кВт.
После одиночного короткого нажатия на кнопку «пуск» подается пусковая частота – 10 Гц. А удерживание инициирует дальнейший разгон до 50 Гц (в течении приблизительно 2 секунд).
Прошивка для контроллера PIC16F628(A) здесь.
Автор: RadioRadar
схема и правильное подключение к трехфазному асинхронному электродвигателю, принципы использования
Частотные преобразователи используются для подключения различных электродвигателей и позволяют регулировать такие характеристики, как скорость вращения ротора, момент силы вала и защищают от перегрузок и перегрева. Также такие устройства дают возможность подключать трехфазное оборудование в однофазную систему без потери мощности и перегрева обмоток двигателя.
Разновидности частотных преобразователей
Современные частотные преобразователи различаются многообразием схем, которые можно сгруппировать в несколько категорий:
- Высоковольтные двухтрансформаторные
Принцип работы такого прибора заключается в последовательном преобразовании напряжения при помощи понижающего и повышающего трансформатора, преобразования частоты низковольтным преобразователем, а также сглаживание пиковых перенапряжений на выходе с помощью синусоидального фильтра.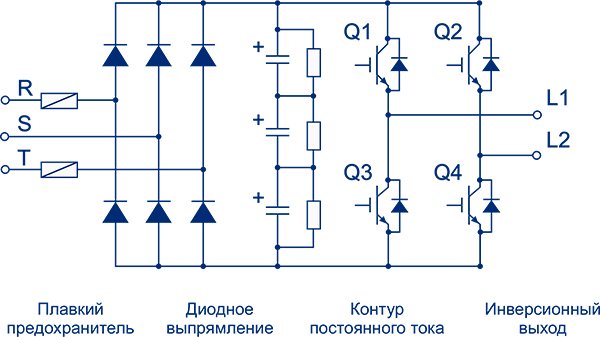 Схема работы выглядит следующим образом: питающее напряжение 6000 В подается на понижающий трансформатор и на его выходе получают 400 (660) В, далее оно подается на низковольтный преобразователь и после изменения частоты подается на повышающий трансформатор для увеличения значения напряжения до начального.
Схема работы выглядит следующим образом: питающее напряжение 6000 В подается на понижающий трансформатор и на его выходе получают 400 (660) В, далее оно подается на низковольтный преобразователь и после изменения частоты подается на повышающий трансформатор для увеличения значения напряжения до начального.
- Тиристорные преобразователи
Такие устройства состоят из многоуровневых частотных преобразователей на основе тиристоров. Конструктивно они состоят из трансформатора (обеспечивающего понижение питающего напряжения), диодов (для выпрямления) и конденсаторов (для сглаживания). Также для уменьшения уровня высших гармоник применяют многопульсные схемы.
Тиристорные преобразователи имеют высокий КПД до 98 % и большой диапазон выходных частот 0-300 Гц, что для современного оборудования является положительной и востребованной характеристикой.
- Транзисторные частотные преобразователи
Такие частотные преобразователи являются высокотехнологичными устройствами, которые собираются на транзисторах различного типа.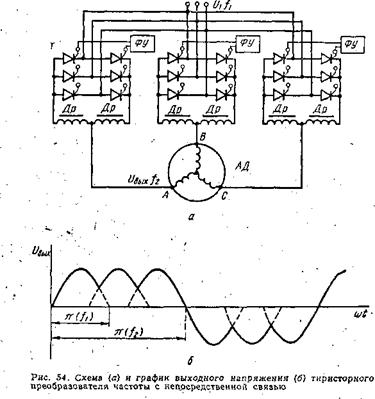 Конструктивно они имеют транзисторные инверторные ячейки и многообмоточный сухой трансформатор специальной конструкции. Управляют таким преобразователем с помощью микропроцессора, что позволяет тонко настраивать работу оборудования и контролировать весь процесс работы различных двигателей. Транзисторные частотные преобразователи, так же, как и тиристорные, имеют высокий КПД и широкий диапазон регулирования частоты.
Конструктивно они имеют транзисторные инверторные ячейки и многообмоточный сухой трансформатор специальной конструкции. Управляют таким преобразователем с помощью микропроцессора, что позволяет тонко настраивать работу оборудования и контролировать весь процесс работы различных двигателей. Транзисторные частотные преобразователи, так же, как и тиристорные, имеют высокий КПД и широкий диапазон регулирования частоты.
Как подключить частотный преобразователь
Для подключения частотного преобразователя к оборудованию, прежде всего необходимо убедиться в том, что характеристики такого прибора подходят для работы с конкретным электродвигателем. Также важно, чтобы напряжение питающей сети позволяло использовать данный частотный преобразователь.
При установке и подключении ЧП необходимо, чтобы условия эксплуатации соответствовали классу защищённости от влаги и пыли, а также были выдержаны все расстояния от движущихся частей машин и механизмов, от людских проходов и электрооборудования и аппаратуры.
Схема подключения ПЧ
Частотные преобразователи бывают как для трехфазных сетей, так и для однофазных. При этом к однофазной сети также можно подключать и трехфазный частотный преобразователь по схеме «треугольник», который дополнительно оснащен специальным конденсаторным блоком (при этом значительно падает мощность и понижается КПД устройства). Подключение же трехфазного преобразователя в соответствующей сети производится по схеме «звезда».
Управление частотным преобразователем может осуществляться с использованием контакторов, встроенных в различные релейные схемы, микропроцессорных контроллеров и компьютерного оборудования, а также вручную. Поэтому при подключении автоматизированных систем требуется участие специалистов по наладке такого оборудования.
Обратите внимание! Частотный преобразователь может иметь дополнительные настройки, выполняемые с помощью DIP-переключателей, а также встроенным программным обеспечением.
Принцип подключения частотных преобразователей в целом одинаковый, но может несколько отличаться для разных моделей. Поэтому правильным решением будет перед подключением изучить инструкцию, сопоставить характеристики устройств и убедиться в том, что устройство подключается по схеме, предложенной производителем.
Для трехфазного электродвигателя
Для трехфазного электродвигателя принцип подключения следующий: к клеммным колодкам на выходе трехфазного частотного преобразователя подключаются фазные проводники к каждому выводу, а на вход подключаются фазы питающего напряжения. В данном случае всегда реализуется схема подключения «звезда» в двигателе. При подключении трехфазного двигателя через частотный преобразователь к однофазной сети применяют схему «треугольник».
Для однофазного электродвигателя
Для однофазного электродвигателя необходимо подключить фазный и нулевой проводник к преобразователю частоты, а обмотки двигателя подключаются к соответствующим клеммам на выходе частотного преобразователя. Например, обмотка L1 будет подключаться к клемме А преобразователя, обмотка L2 к клемме B, а общий провод к клемме C. Если применяется конденсаторный двигатель, то от частотного преобразователя фаза подключается к двигателю, а конденсатор обеспечивает сдвиг фаз.
Во всех случаях, при подключении частотных преобразователей и электродвигателей, всегда следует применять устройства защиты: автоматические выключатели и УЗО, рассчитанные на высокие пусковые токи, а также обязательно подключать заземляющий проводник к корпусам устройств. Также важно обратить внимание на сечение проводников электрокабеля, которым будет производится подключение – сечение должно соответствовать параметрам подключаемого частотного преобразователя и нагрузки.
выбор и расчёт, управление, сборка своими руками
Одним из главных недостатков асинхронных двигателей является сложность регулировки частоты вращения. Изменять её можно тремя способами: изменением количества пар полюсов, изменением скольжения и изменением частоты. В последнее время для регулирования скорости вращения асинхронного короткозамкнутого двигателя частоту тока меняют с помощью частотных преобразователей для электродвигателя.
Понятие о принципе работы частотника
В последнее время на производстве стали широко использоваться высокочастотники, у многих неопытных новичков, встречающих их на практике, часто возникает вопрос, что такое частотный преобразователь и для чего он нужен. Достоинствами частотного привода для электродвигателя являются:
- снижение электропотребления двигателем;
- улучшение показателей работы: плавность запуска и регулировки скорости вращения;
- исключение возможных перегрузок.
Плавность пуска обеспечивается преобразователем благодаря снижению с его помощью пускового тока, который без частотника превышает номинальный ток в 5–7 раз.
Основными частями в устройстве преобразователя являются инвертор и конденсаторы. Инвертор обычно выполнен из диодных мостов. Его задача — выпрямить напряжение на входе, которое может принимать значение 220В или 380В в зависимости от количества фаз, но сохранить при этом пульсации. Затем конденсаторы выпрямленное напряжение сглаживают и фильтруют.
Потом постоянный ток отправляется на микросхемы и выходные мостовые IGBT-ключи. Обычно мостовой IGBT-ключ — это шесть транзисторов, соединённых по мостовой схеме. Защиту от пробоя напряжения обратной полярности осуществляют диоды. В более ранних схемах вместо транзисторов были использованы тиристоры, значительными недостатками которых были некоторая замедленность в работе и помехи.
Благодаря этим устройствам возникает широтно-импульсная последовательность с необходимой частотой. На выходе частотника импульсы напряжения имеют прямоугольный вид. А после того как они проходят через обмотку статора, вследствие её индуктивности, принимают синусоидальный вид.
Чтобы понять, зачем нужен инвертор, необходимо уяснить, что ток бывает постоянным и переменным. И если преобразователи частоты используются при работе с переменным током, то для управления электромотором постоянного тока необходим электропривод постоянного тока. Он называется инвертором и его назначением в схеме является контроль тока возбуждения. И он также независимо от изменений нагрузки может поддерживать скорость вращения ротора в требуемых пределах и осуществлять его торможение.
Советы по выбору частотников
При выборе частотника наиболее низкая стоимость определена набором минимальных функций. Рост стоимости пропорционален их увеличению.
Первоначально преобразователи классифицируют по мощности. Не менее важными параметрами являются перегрузочная способность и тип исполнения.
Мощность частотника должна быть не меньше максимальной мощности установки. Для оперативного ремонта или замены в случае поломки частотного привода для электромотора желательно, чтобы сервис-центр был расположен в непосредственной близости.
При выборе преобразователя немаловажным фактором является его напряжение. Если подобрать частотник определённого напряжения, а в сети оно окажется более низким, то он будет отключаться. Если же напряжение сети будет длительно допускать допустимое напряжение, то это приведёт к его повреждению и невозможной дальнейшей работе. С учётом этих рисков нужно выбирать частотники с большим интервалом допустимого напряжения.
Существует два типа управления преобразователей: векторное и скалярное.
При скалярном управлении удерживается постоянство между значением напряжения и частоты на выходе. Это наиболее простой тип частотников, и, вследствие этого, более дешёвый.
При векторном управлении из-за снижения статической ошибки управление осуществляется более точно. Но и стоимость асинхронного преобразователя частоты с этим видом управления более высока в сравнении со скалярным управлением.
Зона регулирования частоты тока должна быть в необходимых пределах. Для диапазонов с регулировкой по частоте более, нежели в 10 раз лучше выбрать векторное управление.
Количество вводов должно быть оптимальным, потому как при слишком большой их численности цена прибора для изменения частоты будет неоправданно завышена, а также могут возникнуть некоторые сложности при его настройке.
Необходимо учесть перегрузочные способности частотника по току и мощности. Ток частотника должен быть чуть больше, нежели номинальный ток двигателя. В случае возникновения ударных нагрузок необходим запас по пиковому току, который должен быть не менее 10% от ударного тока.
Расчёт частотника для электродвигателя
Для того чтобы преобразователь частоты имел возможность работать надёжно и соблюдать заданные значения, необходимо рассчитать его основные параметры:
- тип исполнения;
- ток;
- мощность.
Расчёт тока преобразователя производится по формуле:
где Р – номинальная мощность двигателя, квт;
U – напряжение, В
сosφ – значение коэффициента мощности
Правильный выбор мощности прибора для изменения частоты сказывается на эффективности работы установки. При заниженной мощности частотного преобразователя производительность оборудования будет невысокой. Длительные перегрузки при работе могут привести к поломке преобразователя частоты.
При завышенной мощности частотного преобразователя и скачках напряжения или перегрузке не сработает защита электродвигателя, что приведёт к его повреждению. U
Мощность частотника должна быть больше номинальной мощности соответствующего двигателя на 15%.
Необходимые материалы для самодельного частотника
Изготовить частотник своими руками практически возможно. Для этого нужно определиться с основными деталями, приобрести их, изучить схему сборки. Затем приступить к процессу изготовления.
В начале работы необходимо запастись двумя платами. На одной из плат необходимо установить микроконтроллер и индикатор. На второй — транзисторы, диодный мост, входные клеммы, блок питания и драйвер. Между собой платы необходимо соединять гибким проводом.
Питания будет производиться с помощью импульсного блока.
Для управления маломощным мотором достаточно будет установки токового шунта и подключённого к нему усилителя DA-1. Сечение жил токового шунта составляет полмиллиметра. Для двигателей с более высокой мощностью установки токового шунта недостаточно и поэтому необходимо устанавливать трансформатор.
При мощности двигателей более 0,4 КВт необходима установка термодатчиков.
Микросхема IL300 с линейной развязкой позволяет контролировать параметры электродвигателя.
Оптроны типа ОС2–4 необходимы для дубляжа управляющих кнопок.
В результате эксплуатации вследствие большой протяжённости проводов могут возникать помехи. Устранить их можно с помощью специальных колец для удаления помех.
Подключение и настройка
При подключении асинхронного преобразователя частоты в сеть однофазного тока клеммы двигателя необходимо соединить в «треугольник». Эта схема соединения подразумевает присоединение конца и начала соседних обмоток. Напряжение питания при этом будет 220 В. Выходной ток необходимо удерживать в пределах не более половины его номинального значения.
Если частотник подключается к трехфазной сети, то клеммы двигателя соединяются в «звезду». При этой схеме соединения концы трёх фаз обмоток соединяются в одну точку. Напряжение от сети принимает значение 380В.
Очерёдность подключения общей электрической цепи будет следующей:
- дифференциальный автоматический выключатель, ток которого совпадает с номинальным током двигателя;
- преобразователь частоты;
- электродвигатель.
При работе с трехфазной сетью автоматический выключатель должен быть снабжён общим рычагом по всем трём фазам. В таком случае перегрузка одной из фаз будет устранена выключением всего питания. Допустимый ток срабатывания должен быть рассчитан на основе значения тока двигателя в одной фазе.
При установке преобразователя в однофазную сеть допустимый ток автоматического выключателя должен превышать в три раза значение фазного тока.
Подключается преобразователь к электромотору с помощью магнитного пускателя. Выбирается магнитный пускатель по напряжению сети и номинальному току.
Перед монтажом пульта управления его рычаг должен быть в положении «Выключено». При включении рычага обязательным условием есть появление сигнала на световом индикаторе. Клавишей RUN производится запуск частотника. А рукоятка пульта управления контролирует изменение числа оборотов ротора двигателя.
Следует с особым вниманием изучить значение частоты на частотнике, так как на одних моделях указывается частота вращения ротора электродвигателя, а на других приведена частота тока преобразователя.
Настройка частотного преобразователя для электродвигателя начинается с внимательного изучения инструкции, так как в ней указана последовательность этих операций.
Для того чтобы настроить частотный преобразователь для электродвигателя, необходимо произвести правильный выбор типа проводов и верный размер их сечения.
Перед настройкой частотника необходимо правильно обнаружить и подключить входные и выходные клеммы. Входные клеммы маркируются буквой L с указанием нумерации фазы. Выходные клеммы обозначены латинскими буквами — U, V, W.
Так как параметров у преобразователя заводского исполнения довольно-таки много, частично его настройка производится на заводе. Остальные параметры настраиваются вручную. Основные этапы настройки частотного преобразователя:
- подача питания на частотный преобразователь;
- выбор определённого режима работы;
- установка значений рабочих характеристик оборудования.
Эксплуатация частотника
Правильный порядок эксплуатации преобразователя частоты заключается в выполнении основных операций:
- Систематическая очистка частотного привода для электродвигателя от пыли и грязи.
- Регулярно менять детали, срок годности которых истекает.
- Постоянный контроль напряжения и температуры.
- Работа устройства должна проходить при заданных условиях: не превышать допустимый уровень пыли, влажности, температуры окружающей среды.
Нежелательным является попадание прямых солнечных лучей на частотник, отсутствие достаточной вентиляции. Материалы и жидкости, которые достаточно легко воспламеняются, не должны находиться рядом с ним. В помещении регулярно должна проводиться обработка против грызунов. Место установки частотного привода для электродвигателя не должно иметь шероховатостей, позволять вибрации.
Частотники для двигателя мощностью около 3 КВт являются наиболее распространёнными ввиду компактности, относительно невысокой цены, простоты установки и обслуживания
Собирать вручную частотники для двигателей мощностью 3 КВт и больше нет смысла — они будут довольно дорогими по цене и не всегда обеспечивать необходимую точность в работе.
Для двигателей мощностью 3 КВт преобразователи частоты находят применение:
- в системах вентиляции для контроля скорости вращения вентилятора;
- для одновременности работы принимающего и подающего конвейеров;
- для подачи сырья с контролем его объёма;
- для управления несколькими насосами;
- для контроля работы погружным насосом;
- для регулировки скорости подачи сырья в дробилках.
Частотники для двигателей большей мощности отличаются величиной максимальной выходной частоты, наличием фильтра электромагнитной совместимости (ЕМС), видом режима управления.
Например, у частотного привода для электродвигателя мощностью 15 КВт максимальная выходная частота меньше, нежели у преобразователя для двигателя мощностью 3 КВт. ЕМС фильтр для такого двигателя не предусмотрен. Режим управления только скалярный.
Частотный преобразователь — принцип работы, схема подключения, фото и видео материал
Автор Aluarius На чтение 4 мин. Просмотров 306 Опубликовано
Электрическая оснащенность современных зданий (жилых и нежилых) – это не только удобство, это определенные проблемы, связанные с подбором одного электрического прибора для работы остальных или эффективной работы целой системы. К примеру, асинхронный двигатель с короткозамкнутым ротором, который сегодня используется повсеместно, даже в быту. Так вот вращается он с определенной скоростью, что не всегда удобно. Изменить скорость вращения можно двумя способами: механическим, установив редуктор, как промежуточную часть, и электрическим, установив частотный преобразователь. В этой стать будем говорить именно о втором приборе. Итак, частотный преобразователь – принцип работы, устройство, положительные и отрицательные стороны.
Частотные преобразователи служат для регулирования скорости асинхронного двигателяС чего необходимо начать наш разговор? Электродвигатель при пуске потребляет большой ток, который называется пусковым. Он раз в семь превышает номинальный. Так вот частотный преобразователь снижает величину пускового тока в пять раз, при этом запуск электродвигателя происходит плавно. А так как пусковой ток снижает свои значения, значит, это неплохая экономия электроэнергии. Тестирования показали, что экономия составляет до 50%.
Принцип работы
Нас в первую очередь интересует принцип работы частотного преобразователя. Но начать надо с его устройства (со схемы). По сути, преобразователь – это инвертор с двухэтапным преобразованием напряжения. Вот его схема:
- Первый этап – это выпрямление и сглаживание напряжения сети или 220 В, или 380 В. Сначала ток проходит через диодный мост, где выпрямляется. Затем проходит через конденсаторы, где фильтруется и сглаживается. То есть, на выходе получается напряжение постоянного тока.
- Второй этап – это необходимость перевести постоянное напряжение в переменное. Для этого в прибор установлены специальные микросхемы управления или инвертор на транзисторах.
А вот теперь принцип работы. С получением постоянного напряжения все понятно. Как же образуется переменный ток с разной частотой и амплитудой? Система управления выдает сигналы, которые поступают на обмотки электродвигателя. Соединение обмоток и преобразователя частоты производится через силовые транзисторы инвертора, у которого есть положительный и отрицательный полюс. Длительность подключения каждой обмотки формируется по синусоидальной кривой, где учитывается период следования импульсов.
В середине полупериода ширина импульсов самая большая, в начале и конце – самая маленькая. Именно на этом и основывается система управления, которая обеспечивает широтно-импульсную модуляцию напряжения (ШИМ). При этом амплитуда и частота напряжения зависят от параметров и характеристик синусоидальной кривой.
Необходимо отметить, что существуют частотные преобразователи, в которых настройка производится вручную и автоматически.
Критерии выбора частотного преобразователя
Существует несколько параметров, которые необходимо учитывать, выбирая частотный преобразователь. Вот основные из них.
Функциональность
Конкуренция на рынке жесткая, так что производители стараются наделить свои преобразователи различными функциями. Правда, при этом создают базовую функциональность, которая и закладывается в себестоимость изделия. Все остальные функции – это бонусы, поэтому стоит обращать внимание именно на базу.
Способ управления
Здесь выбор стоит между скалярным и векторным управлением. Вторые дороже, но со сниженной статистической ошибкой. Первые – это приборы, которые поддерживают одно и то же соотношение между напряжением и частотой. К примеру, для вентиляторов данная схема управления бывает достаточной.
Мощность
Тут все понятно, преобразователь должен выдерживать мощность потребителя. Оптимальный же вариант – это когда, к примеру, установка циркуляционного насоса для отопительной системы требует установки той же марки частотного преобразователя для насоса. К тому же обязательно узнайте, есть ли в вашем городе сервисный центр, который отремонтирует купленный вами прибор.
Сетевое напряжение
Напряжение в отечественных подающих сетях оставляет желать лучшего. То оно падает ниже 180 вольт, то взлетает выше 270 вольт. Поэтому, выбирая частотный преобразователь, необходимо обратить внимание на диапазон напряжений, в пределах которых он может работать. Оптимальный вариант – максимальный диапазон.
Схемы подключения
Схема подключения частотного преобразователя к электродвигателю может производиться от одно- или 3-х фазных сетей. При этом к однофазной сети можно подключить однофазный преобразователь или трехфазный с установкой конденсаторного блока. Но необходимо учитывать тот факт, что при подключении трехфазного преобразователя к однофазной сети произойдет падение мощности. Подключение производится по схеме треугольник. В трехфазном подключении используется только схема звезда.
Обратите внимание, что при использовании электродвигателя мощность больше 5 кВт для снижения пускового момента, можно применять переход звезда-треугольник. То есть, при пуске, чтобы он был плавным, статор подключается по схеме звезда. Как только мотор наберет номинальное вращение статора, схема переключится на треугольник. Единственный момент, на который необходимо обратить внимание, это возможность работы трехфазного двигателя и по схеме звезда, и по схеме треугольник.
Системный преобразователь частоты — асинхронный двигатель с положительной обратной связью по току
Системный преобразователь частоты — асинхронный двигатель с положительной обратной связью по току
Основные законы, регулирующие скорость асинхронного двигателя класса при питании от инвертора напряжения рассмотрены в разделе 5. Теоретически и практически доказано, что в классе законов невозможно одновременно обеспечить удовлетворительные механические и силовые характеристики в широкий диапазон скоростей и изменений нагрузки.Основная причина этого — усиление влияния активного сопротивления обмотки статора при снижении частоты питающего напряжения. В асинхронных частотно-регулируемых электроприводах со скалярным управлением, помимо законов регулирования класса, применяются другие регулирующие законы. Схема замены асинхронной машины, пригодная для анализа как установившихся, так и переходных режимов работы при любой частоте питающего напряжения обмотки статора, показана на рис.6.39.
Рис. 6.39. Схема замены асинхронной машины в установившемся режиме с частотным регулированием
В соответствии со схемой подстановки (рисунок 6.39) можно записать следующие уравнения:
(6,65)
(6,66)
(6,67)
Таким образом, компенсируя падения напряжения на резисторах, можно получить частотные законы, регулирующие скорость классов.
В соответствии с уравнениями математической модели асинхронного двигателя в фиксированной системе координат, условие поддержания постоянного отношения между ЭДС и частотой напряжения статора в статике также является условием стабилизации потокосцепления статора. Регулировка класса — это регулировка постоянного потока в воздушном зазоре и регулировка класса с постоянным магнитным потоком ротора.
Если при изменении нагрузки на валу двигателя соответствующие значения ЭДС или поддерживаются постоянными, то механические характеристики асинхронного двигателя приобретут вид, показанный на рис.6.40.
Рис. 6.40. Механические характеристики асинхронного двигателя при различных законах управления:
Анализ механических характеристик, представленных на рис. 6.40. показывает, что для стабилизации скорости при изменении нагрузки на вал двигателя предпочтение следует отдавать способу регулирования с. Однако такое регулирование подразумевает увеличение напряжения по сравнению с номиналом для всех значений нагрузки, что в большинстве случаев приводит к насыщению магнитопровода асинхронного двигателя и его перегреву.Поэтому на практике наиболее распространены методы частотного регулирования скорости, например
При регулировке частоты вращения в классе законов необходимо увеличивать фазное напряжение только на величину падения напряжения на активном сопротивлении обмотки статора, а способ регулирования частоты вращения асинхронного двигателя называется частота управление с компенсацией W.
Управление компенсационным падением напряжения на активном сопротивлении статора возможно как при отклонении, так и при возмущении, со скалярной или векторной IR -компенсацией.
«>Привод асинхронного двигателя с полевым управлением (FOC), модель
Внедрить модель привода асинхронного двигателя с полевым управлением (FOC)
Библиотека
Simscape / Электрические / Специализированные силовые системы / Электрические приводы / Приводы переменного тока
Описание
Блок привода индукционного двигателя с полевым управлением представляет стандарт векторный или роторный управляемый привод для асинхронных двигателей.Этот привод имеет регулирование скорости с обратной связью на основе косвенного или прямого векторного управления. Скорость контур управления выдает эталонный электромагнитный момент и поток ротора машины. В опорные прямые и квадратурные (dq) составляющие тока статора, соответствующие управляемые поток и крутящий момент ротора выводятся на основе стратегии косвенного векторного управления. В затем используются опорные компоненты dq тока статора для получения требуемых стробирующих сигналов. для инвертора через гистерезисный или ШИМ-регулятор тока.
Основным преимуществом этого привода по сравнению с приводами с скалярным управлением является его быстрая динамика. ответ. Внутренний эффект связи между крутящим моментом и магнитным потоком в машине регулируется. за счет развязки (ориентации потока ротора) управления, что позволяет крутящему моменту и потоку быть управляются независимо. Однако из-за сложности вычислений реализация этого Привод требует быстрых вычислительных процессоров или DSP.
Примечание
В Simscape ™
Программное обеспечение Electrical ™ Specialized Power Systems, индукционное управление с ориентацией на поле
Блок моторного привода обычно называют моторным приводом AC3 .
Блок привода индукционного электродвигателя с полевым управлением использует эти блоки из библиотеки Electric Drives / Fundamental Drive Blocks:
Remarks
Модель дискретная. Хорошие результаты моделирования были получены с 2 µ с временным шагом. Для моделирования устройства цифрового контроллера система управления имеет два разных времени выборки:
Время выборки регулятора скорости должно быть кратно времени выборки FOC. В последнее время выборки должно быть кратным временному шагу моделирования.Среднее значение инвертор позволяет использовать большие временные шаги моделирования, поскольку он не генерирует малое время постоянные (из-за демпферов RC), присущие детализированному преобразователю. Для времени выборки ВОК 60 мкс, хорошие результаты моделирования были получены для временного шага моделирования 60 мкс. Этот временной шаг не может быть больше, чем временной шаг FOC.
Параметры
Общие
- Режим выходной шины
-
Выберите способ организации выходных переменных.Если вы выберете
Multiple выходные шины(по умолчанию), блок имеет три отдельные выходные шины для двигателя, преобразователь и переменные контроллера. Если вы выберетеSingle output шина, все переменные выводятся на одну шину. - Уровень детализации модели
-
Выберите между детальным инвертором и инвертором среднего значения. По умолчанию
Детальный. - Механический вход
-
Выберите между крутящим моментом нагрузки, скоростью двигателя и механическим портом вращения, как механический ввод.По умолчанию
Torque Tm.Если вы выбираете и применяете крутящий момент нагрузки, выходом будет скорость двигателя в соответствии с следующее дифференциальное уравнение, описывающее динамику механической системы:
Эта механическая система включена в модель двигателя.
Если вы выберете скорость двигателя в качестве механического входа, вы получите электромагнитный крутящий момент как выходной, что позволяет вам представить динамику механической системы извне. В внутренняя механическая система не используется с этим выбором механического входа и инерцией и параметры вязкого трения не отображаются.
Для механического вращающегося порта порт подключения S считается механическим. ввод и вывод. Это позволяет напрямую подключаться к среде Simscape. Механическая система двигателя также включена в привод. и основан на том же дифференциальном уравнении.
См. Механическое соединение двух моторных приводов.
- Использовать шину в качестве меток
-
Когда вы установите этот флажок,
Motor,Conv, иCtrlизмерительные выходы используют имена сигналов для идентификации шины этикетки.Выберите этот вариант для приложений, в которых на этикетках сигналов шины должны быть только буквенно-цифровые символы.Когда этот флажок снят (по умолчанию), выход измерения использует сигнал определение для идентификации меток шины. Этикетки содержат не буквенно-цифровые символы, которые несовместимы с некоторыми приложениями Simulink ® .
- Установить без датчика
-
При установке этого флажка скорость двигателя оценивается по напряжениям на клеммах и токи на основе метода адаптивной системы привязки к модели (MRAS).В Sensorless Вкладка содержит параметры контроллера оценки.
Когда этот флажок снят, скорость двигателя измеряется внутренней скоростью. sensor, а вкладка Sensorless не отображается на маске блока.
Вкладка «Асинхронная машина»
На вкладке « Асинхронная машина » отображаются параметры Блок Asynchronous Machine библиотеки Fundamental Blocks (powerlib).
Преобразователи и вкладка шины постоянного тока
Секция выпрямителяСекция выпрямителя преобразователей и постоянного тока На вкладке Bus отображаются параметры блока Universal Bridge библиотека Fundamental Blocks (powerlib).Подробнее об универсальном мосту параметры, см. справку по универсальному мосту страница.
Секция шины постоянного тока- Емкость
-
Емкость шины постоянного тока (F). По умолчанию
2000e-6.
- Сопротивление
-
Сопротивление тормозного прерывателя, используемое для предотвращения перенапряжения шины во время двигателя замедление или когда крутящий момент нагрузки стремится ускорить двигатель (Ом).По умолчанию
8. - Частота прерывателя
-
Частота тормозного прерывателя (Гц). По умолчанию
4000. - Напряжение включения
-
Динамическое торможение активируется, когда напряжение на шине достигает верхнего предела полоса гистерезиса (V). На следующем рисунке показана логика гистерезиса тормозного прерывателя. По умолчанию
320. - Напряжение отключения
-
Динамическое торможение отключается, когда напряжение на шине достигает нижнего предела полоса гистерезиса (V).Логика гистерезиса чоппера показана на следующем рисунке. По умолчанию
310.
Секция инвертора Преобразователи и постоянного тока На вкладке Bus отображаются параметры блока Universal Bridge библиотека Fundamental Blocks (powerlib). Подробнее об универсальном мосту параметры, см. справку по универсальному мосту страница.
Преобразователь среднего значения использует следующие параметры.
- Частота источника
-
Частота источника трехфазного напряжения (Гц). По умолчанию
60. - Сопротивление в открытом состоянии
-
Сопротивление переключателя инвертора в открытом состоянии (Ом). По умолчанию
1д-3.
Вкладка «Контроллер»
- Тип регулирования
-
Это всплывающее меню позволяет выбирать между регулировкой скорости и крутящего момента.По умолчанию
Регулировка скорости. - Тип модуляции
-
Выберите гистерезисную или пространственную векторную модуляцию. Тип модуляции по умолчанию —
Гистерезис. - Схема
-
Когда вы нажимаете эту кнопку, появляется диаграмма, показывающая регуляторы скорости и тока схемы появляется.
- Рампы скорости — ускорение
-
Максимальное изменение скорости, допустимое во время разгона двигателя (об / мин / с).Чрезмерно Большое положительное значение может вызвать пониженное напряжение в шине постоянного тока. Этот параметр используется в скорости только режим регулирования. По умолчанию
900. - Рампы скорости — замедление
-
Максимальное изменение скорости, допустимое во время замедления двигателя (об / мин / с). Чрезмерно большое отрицательное значение может вызвать перенапряжение шины постоянного тока. Этот параметр используется в скорости только режим регулирования. По умолчанию
-900. - Частота отсечки скорости
-
Частота отсечки фильтра нижних частот первого порядка измерения скорости (Гц).Этот параметр используется только в режиме регулирования скорости. По умолчанию
1000. - Время выборки регулятора скорости
-
Время выборки регулятора скорости (с). Время выборки должно быть кратным шаг по времени моделирования. По умолчанию
100e-6. - ПИ-регулятор — Пропорциональное усиление
-
Пропорциональное усиление регулятора скорости. Этот параметр используется при регулировании скорости. только режим.По умолчанию
300. - ПИ-регулятор — интегральное усиление
-
Интегральное усиление регулятора скорости. Этот параметр используется в режиме регулирования скорости. только. По умолчанию
2000. - Пределы выходного крутящего момента — отрицательные
-
Максимальный отрицательный требуемый крутящий момент, прикладываемый к двигателю регулятором тока (Нм). По умолчанию
-1200. - Пределы выходного крутящего момента — положительный
-
Максимальный положительный требуемый крутящий момент, прикладываемый к двигателю регулятором тока (Н.м). По умолчанию
1200.
- Регулятор потока — пропорциональное усиление
-
Пропорциональное усиление регулятора потока. По умолчанию
100. - Регулятор потока — интегральное усиление
-
Интегральное усиление регулятора потока. По умолчанию
30. - Пределы выхода потока — отрицательный
-
Максимальный отрицательный выход регулятора потока (Wb).По умолчанию
-2. - Пределы выхода потока — положительный
-
Максимальный положительный выход регулятора потока (Wb). По умолчанию
2. - Частота среза фильтра нижних частот
-
Частота среза фильтра первого порядка оценки потока (Гц). По умолчанию
16. - Время выборки
-
Время выборки контроллера FOC (с).Время выборки должно быть кратным шаг по времени моделирования. По умолчанию —
20e-6. - Диапазон гистерезиса регулятора тока
-
Текущая полоса гистерезиса. Это значение представляет собой общую распределенную полосу пропускания. симметрично относительно текущей уставки (A) . По умолчанию
10. На следующем рисунке показан случай, когда текущая уставка составляет Is * , а текущая полоса гистерезиса установлена на dx.Этот параметр не используется при использовании инвертора среднего значения.
- Максимальная частота коммутации
-
Максимальная частота коммутации инвертора (Гц). Этот параметр не используется при использовании инвертор среднего значения. По умолчанию
20000. - Показать / скрыть автонастройку Control
-
Выберите, чтобы показать или скрыть параметры инструмента Autotuning Control.
- Желаемое демпфирование [дзета]
-
Укажите коэффициент демпфирования, используемый для расчета коэффициентов усиления Kp и Ki Блок регулятора скорости (AC). По умолчанию
0,9. - Желаемое время отклика при 5% [Trd (sec)]
-
Укажите желаемое время установления блока регулятора скорости (AC). Это время, необходимое для того, чтобы реакция контроллера достигла и оставалась в пределах 5%. диапазон целевого значения.По умолчанию
0,1. - Соотношение полосы пропускания (InnerLoop / SpeedLoop)
-
Укажите соотношение между полосой пропускания и собственной частотой регулятора. По умолчанию
30. - Расчет усиления ПИ-регулятора
-
Расчет пропорционального усиления и Интеграл получить параметров регулятора скорости (AC) и Блоки полевого контроллера.Расчет основан на Желаемое демпфирование [zeta] , Желаемое время отклика @ 5% и Соотношение пропускной способности (InnerLoop / SpeedLoop) параметров. Вычисленные значения отображаются в маске блока Drive. Нажмите Примените или ОК , чтобы подтвердить их.
Бездатчиковая вкладка
- Пропорциональное усиление
-
Укажите значение пропорционального усиления ПИ-регулятора, которое используется для настройки скорость двигателя.
По умолчанию
5000. - Интегральное усиление
-
Укажите значение интегрального усиления ПИ-регулятора, которое используется для настройки скорость двигателя.
По умолчанию
50. - Верхний — Верхний предел выхода
-
Укажите верхний предел выхода ПИ-регулятора.
По умолчанию
500. - Нижний — Нижний предел выхода
-
Укажите нижний предел выхода ПИ-регулятора.
По умолчанию
-500. - Время выборки контроллера
-
Время выборки контроллера, в с. Время выборки должно быть кратно времени моделирования. шаг. По умолчанию:
2e-06.
Блок входов и выходов
-
SP -
Уставка скорости или крутящего момента. Заданная скорость может быть ступенчатой, но скорость скорость изменения будет соответствовать рампе ускорения / замедления.Если момент нагрузки и скорости имеют противоположные знаки, ускоряющий момент будет суммой электромагнитного и моменты нагрузки.
-
TmилиWm -
Механический вход: момент нагрузки (Tm) или скорость двигателя (Wm). Для механического ротационный порт (S), этот ввод удаляется.
-
A, B, C -
Трехфазные клеммы моторного привода.
-
Wm,TeилиS -
Механическая мощность: скорость двигателя (Wm), электромагнитный момент (Te) или механический ротационный порт (S).
Когда для параметра Режим выходной шины установлено значение Несколько выходные шины , блок имеет следующие три выходные шины:
-
Motor -
Вектор измерения двигателя. Этот вектор позволяет вам наблюдать переменные двигателя. с помощью блока Bus Selector.
-
Conv -
Вектор измерения трехфазных преобразователей. Этот вектор содержит:
Обратите внимание, что все значения тока и напряжения мостов можно визуализировать с помощью блока мультиметра.
-
Ctrl -
Вектор измерения контроллера. Этот вектор содержит:
Когда для параметра Режим выходной шины установлено значение Одиночный выходная шина , блок группирует выходы Motor, Conv и Ctrl в одну шину вывод.
Технические характеристики модели
Библиотека содержит набор параметров привода мощностью 3 и 200 л.с. Характеристики эти два диска показаны в следующей таблице.
Технические характеристики привода 3 л.с. и 200 л.с.
| Привод 3 л.с. | 54 Привод 200 л.с. | ||||
|---|---|---|---|---|---|
| Амплитуда | 220 В | 460 В | |||
| Частота | 60 Гц | 907 907 ||||
| Мощность | 3 л.с. | 200 л.с. | |||
|
| 1705 об / мин | Напряжение | 220 В | 460 В |
Примеры
Пример ac3_example иллюстрирует моделирование привода двигателя AC3
со стандартными условиями нагружения для детальных и средних моделей.
Ссылки
[1] Bose, B. K. Modern Power Electronics and AC Диски . Река Аппер Сэдл, Нью-Джерси: Прентис-Холл, 2002.
[2] Грелет, Г., и Г. Клерк. Actionneurs électriques . Paris: Éditions Eyrolles, 1997.
[3] Krause, P.C. Анализ электрического Машины . Нью-Йорк: McGraw-Hill, 1986.
Представлен в R2006a
ПреобразовательЦепь, которая преобразует переменный ток в постоянный или из постоянного в переменный, или действует как преобразователь частоты переменного тока.Современные системы электропривода, в которых требуется регулирование скорости электродвигателя, используют преобразователи питания. Эти преобразователи адаптируют напряжение и частоту источника питания к электродвигателю в соответствии с требуемой скоростью электродвигателя. Основными элементами преобразователей являются диоды, транзисторы и тиристоры.
— Циклопреобразователь — Циклопреобразователь — это одноступенчатый (AC-AC) преобразователь, который преобразует переменный ток с постоянной частотой непосредственно в переменный ток с изменяющейся частотой, как это требуется для желаемой скорости двигателя.
Циклопреобразователи используются для питания и управления скоростью синхронных двигателей. Скорость двигателя регулируется путем изменения частоты источника питания двигателя и допускает полный крутящий момент в диапазоне скоростей в любом направлении. Поскольку циклоконвертеры производят относительно низкие частоты, они больше связаны с низкооборотными двигателями с прямым приводом.
— Широтно-импульсная модуляция (PWM ) преобразователь — Преобразователь PWM имеет процесс двойного преобразования (AC-DC-AC) и использует звено постоянного тока.Преобразователи ШИМ используются для питания и управления скоростью асинхронных двигателей. Широтно-импульсная модуляция (ШИМ) использует выпрямитель для создания постоянного напряжения таким же образом, как и синхронный преобразователь. На стороне инвертора он использует принудительную коммутацию, чтобы дать серию импульсов общего напряжения, как положительного, так и отрицательного. Таким образом, выходное напряжение может быть приближено к переменному току, в то время как изменение количества и ширины импульсов может увеличивать или уменьшать частоту. Что касается морских силовых установок, они находятся на нижнем конце диапазона мощности (до 8 МВт), и по мере увеличения частоты выходная волна становится все более искаженной.
— Синхропреобразователь — Синхропреобразователь представляет собой преобразователь переменного тока в постоянный и переменный ток: он преобразует трехфазный переменный ток с постоянным напряжением и частотой в постоянный ток с переменным напряжением, а затем снова в трехфазный переменный ток с переменным напряжением и изменяющейся частотой. частота. Его можно использовать только в сочетании с синхронным двигателем. Чтобы увеличить скорость двигателя, ток увеличивается, что создает более высокие магнитные силы и крутящий момент. Это, в свою очередь, заставляет ротор двигаться быстрее, что быстрее переключает тиристоры, увеличивая частоту переменного тока до тех пор, пока не будет достигнута требуемая скорость.
Синхропреобразователи могут генерировать частоты выше 100 Гц и подходят для высокоскоростных двигателей.
