Как работает частотный преобразователь для асинхронного двигателя. Каковы основные преимущества использования частотных преобразователей. Какие критерии важны при выборе частотного преобразователя.
Принцип работы частотного преобразователя
Частотный преобразователь представляет собой электронное устройство для управления скоростью вращения асинхронного электродвигателя. Его принцип работы основан на изменении частоты и амплитуды питающего напряжения.
Основные компоненты частотного преобразователя:
- Выпрямитель — преобразует переменное напряжение сети в постоянное
- Промежуточная цепь постоянного тока — сглаживает пульсации выпрямленного напряжения
- Инвертор — преобразует постоянное напряжение в переменное регулируемой частоты
- Система управления — формирует сигналы управления для инвертора
Изменение частоты выходного напряжения позволяет плавно регулировать скорость вращения двигателя. При этом система управления обеспечивает оптимальное соотношение между частотой и амплитудой напряжения.
Ключевые преимущества использования частотных преобразователей
Применение частотных преобразователей для управления асинхронными двигателями дает ряд существенных преимуществ:
- Плавный пуск и останов двигателя без пусковых токов и ударных нагрузок
- Широкий диапазон регулирования скорости (обычно от 5% до 200% от номинальной)
- Высокая точность поддержания заданной скорости
- Снижение энергопотребления при работе с переменной нагрузкой
- Продление срока службы двигателя и механизмов за счет снижения нагрузок
- Возможность управления группой двигателей от одного преобразователя
Эти преимущества обеспечивают значительный экономический эффект при использовании частотных преобразователей в различных отраслях промышленности.
Важные критерии выбора частотного преобразователя
При выборе частотного преобразователя следует учитывать ряд ключевых параметров:
- Мощность и номинальный ток двигателя
- Требуемый диапазон регулирования скорости
- Характер нагрузки (постоянный или переменный момент)
- Условия эксплуатации (температура, влажность, запыленность)
- Наличие специальных функций (тормозной модуль, встроенный ПИД-регулятор и т.д.)
- Простота настройки и обслуживания
- Надежность и срок службы
Правильный подбор частотного преобразователя с учетом этих критериев обеспечит оптимальную работу электропривода и максимальный экономический эффект.
Принцип частотного регулирования скорости асинхронного двигателя
Основной принцип частотного регулирования скорости асинхронного двигателя заключается в изменении частоты питающего напряжения. Скорость вращения магнитного поля статора прямо пропорциональна частоте питающего напряжения и обратно пропорциональна числу пар полюсов двигателя:
n = 60f / p
где n — скорость вращения магнитного поля, об/мин; f — частота питающего напряжения, Гц; p — число пар полюсов двигателя.
Изменяя частоту f с помощью преобразователя, можно плавно регулировать скорость вращения двигателя. При этом для сохранения перегрузочной способности двигателя необходимо одновременно с частотой изменять и амплитуду подводимого напряжения.
Способы управления в частотных преобразователях
В современных частотных преобразователях применяются различные способы управления асинхронным двигателем:
- Скалярное управление — простой способ, основанный на поддержании постоянного соотношения U/f
- Векторное управление — обеспечивает высокую точность регулирования скорости и момента
- Прямое управление моментом — позволяет получить быстрый отклик по моменту
Выбор способа управления зависит от требований к динамическим характеристикам привода и точности регулирования. Наиболее совершенным является векторное управление, которое позволяет получить характеристики привода, близкие к характеристикам двигателя постоянного тока.
Энергосбережение при использовании частотных преобразователей
Одним из важнейших преимуществ частотных преобразователей является возможность значительного энергосбережения при работе электроприводов с переменной нагрузкой. Это особенно актуально для насосов, вентиляторов и компрессоров.
Снижение энергопотребления достигается за счет:
- Регулирования скорости двигателя в соответствии с реальной нагрузкой
- Исключения неэффективных способов регулирования (дросселирование, байпасирование)
- Оптимизации режимов работы технологического оборудования
В некоторых применениях экономия электроэнергии при использовании частотных преобразователей может достигать 30-50%, что обеспечивает быструю окупаемость затрат на их внедрение.
Применение частотных преобразователей в различных отраслях
Частотные преобразователи находят широкое применение в различных отраслях промышленности и сферах деятельности:
- Нефтегазовая отрасль — управление насосами и компрессорами
- Водоснабжение и водоотведение — регулирование производительности насосных станций
- Вентиляция и кондиционирование — управление вентиляторами и компрессорами
- Лифтовое хозяйство — обеспечение плавного хода лифтов
- Металлургия — управление прокатными станами и конвейерами
- Деревообработка — регулирование скорости подачи в станках
Внедрение частотных преобразователей позволяет повысить энергоэффективность, улучшить качество технологических процессов и снизить эксплуатационные расходы во многих отраслях экономики.

Принцип работы частотного преобразователя для асинхронного двигателя: описание, характеристики
Содержание
Принцип действия частотного регулирования основан на зависимости скорости вращения и момента силы на валу двигателя переменного тока от частоты напряжения питания. Частотные регуляторы изменяют частоту поданного на электродвигатель напряжения, тем самым регулируя скорость вращения ротора и момент силы.
Асинхронные электродвигатели – самые распространенные электрические машины. Они отличаются простотой конструкции, дешевизной, высокой ремонтопригодностью, а также другими преимуществами. Они широко используются для привода промышленного оборудования, механизмов и устройств самого разного назначения. Сферу их применения несколько ограничивают высокие пусковые токи, затруднение регулирования скорости, ударные механические нагрузки на оборудование, соединенное с валом при пуске.
Частотные преобразователи позволяют осуществлять мягкий пуск электрических машин, ограничивать пусковые токи, синхронизировать момент силы на валу с моментом нагрузки, осуществлять точную регулировку скорости вращения, подключать трехфазные двигатели в однофазную сеть без конденсаторов.
Электродвигатель – устройство для преобразования электроэнергии во вращательное движение вращающейся части электрической машины. Преобразование энергии в двигателях происходит за счет взаимодействия магнитных полей обмоток статора и ротора. Эти электрические машины широко используются во всех отраслях промышленности, в качестве привода электротранспорта и инструментов, в системах автоматизации, бытовой техники и так далее.
По диапазону регулировки частоты
Краткое описание назначения, принципа работы и критериев выбора частотного преобразователя, как устройства управления асинхронным электродвигателем
Асинхронный двигатель с короткозамкнутым ротором является сегодня самым массовым и надежным устройством для привода различных машин и механизмов. Но у каждой медали есть и обратная сторона.
Два основных недостатка асинхронного двигателя – это невозможность простой регулировки скорости вращения ротора, очень большой пусковой ток – в пять, семь раз превышающий номинальный. Если использовать только механические устройства регулирования, то указанные недостатки приводят к большим энергетическим потерям и к ударным механическим нагрузкам. Это крайне отрицательно сказывается на сроке службы оборудования.
Если использовать только механические устройства регулирования, то указанные недостатки приводят к большим энергетическим потерям и к ударным механическим нагрузкам. Это крайне отрицательно сказывается на сроке службы оборудования.
Частотный преобразователь
В результате исследовательских работ в этом направлении родился новый класс приборов, позволивший решить эти проблемы не механическим, а электронным способом.
Частотный преобразователь с широтно–импульсным управлением (ЧП с ШИМ) снижает пусковые токи в 4-5 раз. Он обеспечивает плавный пуск асинхронного двигателя и осуществляет управление приводом по заданной формуле соотношения напряжение / частота.
Частотный преобразователь дает экономию по потреблению энергии до 50%. Появляется возможность включения обратных связей между смежными приводами, т.е. самонастройки оборудования под поставленную задачу и изменение условий работы всей системы.
Принцип работы частотного преобразователя
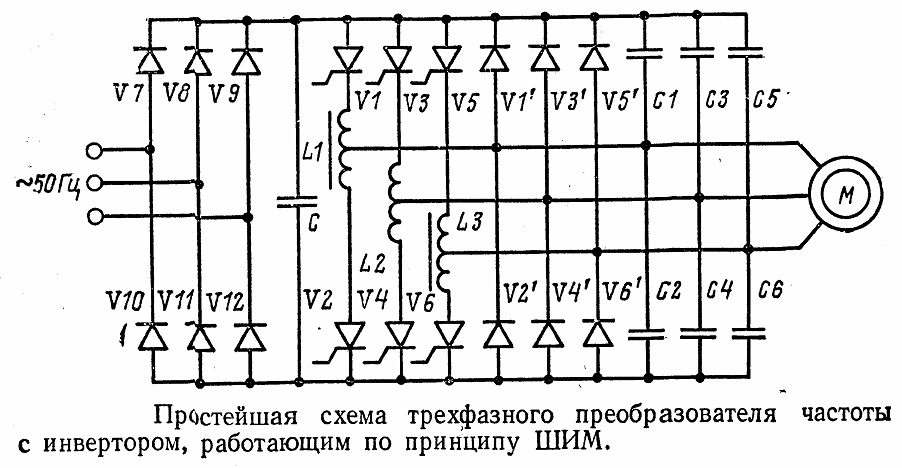
Частотный преобразователь с ШИМ представляет собой инвертор с двойным преобразованием напряжения. Сначала сетевое напряжение 220 или 380 В выпрямляется входным диодным мостом, затем сглаживается и фильтруется с помощью конденсаторов.
Сначала сетевое напряжение 220 или 380 В выпрямляется входным диодным мостом, затем сглаживается и фильтруется с помощью конденсаторов.
Это первый этап преобразования. На втором этапе из постоянного напряжения, с помощью микросхем управления и выходных мостовых IGBT ключей, формируется ШИМ последовательность определенной частоты и скважности. На выходе частотного преобразователя выдаются пачки прямоугольных импульсов, но за счет индуктивности обмоток статора асинхронного двигателя, они интегрируются и превращаются наконец в напряжение близкое к синусоиде.
Критерии выбора частотных преобразователей
Выбор по функциям
Каждый производитель пытается обеспечить себе конкурентное превосходство на рынке. Первое правило для обеспечения максимума продаж – это низкая цена. Поэтому производитель стремиться включить в свое изделие только необходимые функции. А остальные предлагает в качестве опций. Прежде чем купить частотный преобразователь, определитесь, какие функции вам нужны. Стоит выбирать тот прибор, который имеет большинство необходимых функций в базовом варианте.
Стоит выбирать тот прибор, который имеет большинство необходимых функций в базовом варианте.
По способу управления
Сразу отбрасывайте те преобразователи, которые не подходят по мощности, типу исполнения, перегрузочной способности и т.д. По типу управления, нужно определиться, что выбрать, скалярное или векторное управление.
Большинство современных частотных преобразователей реализуют векторное управление, но такие частотные преобразователи дороже, чем частотные преобразователи со скалярным управлением.
Векторное управление дает возможность более точного управления, снижая статическую ошибку. Скалярный режим только поддерживает постоянное соотношение между выходным напряжение и выходной частотой, но например, для вентиляторов это вполне достаточно.
По мощности
Если мощности оборудования примерно одинаковы, то выбирайте преобразователи одной фирмы с мощностью по мощности максимальной нагрузки. Так вы обеспечите взаимозаменяемость и упростите обслуживание оборудования.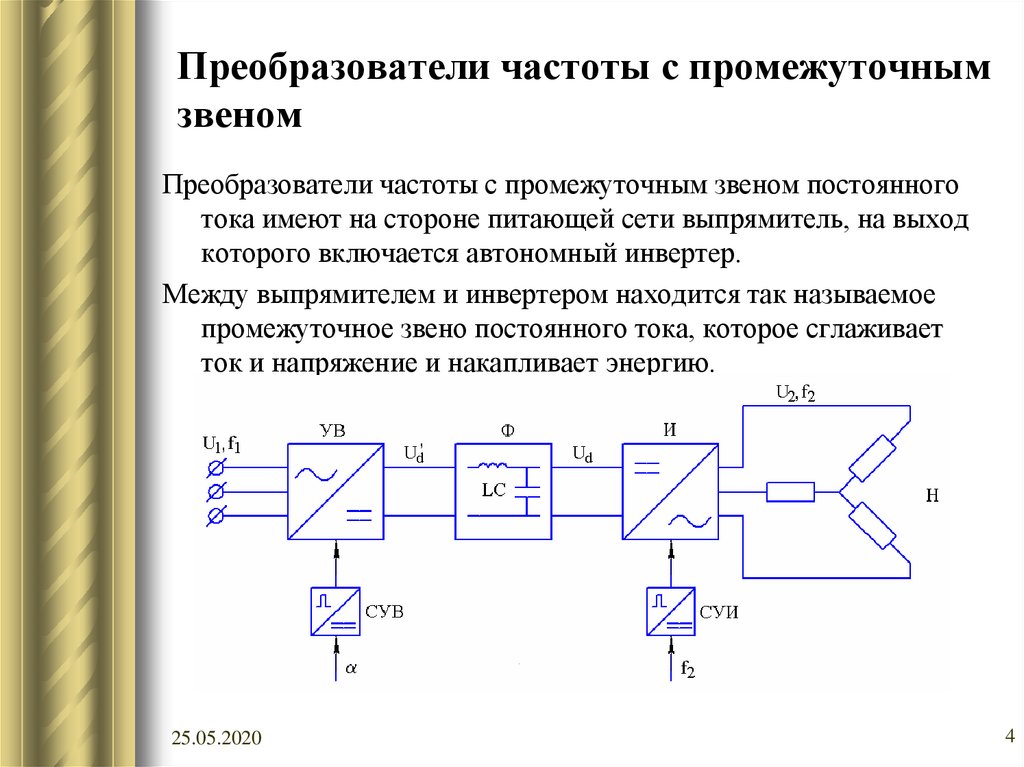 Желательно, чтобы сервис центр выбранного частотного преобразователя был в вашем городе.
Желательно, чтобы сервис центр выбранного частотного преобразователя был в вашем городе.
По сетевому напряжению
Всегда выбирайте преобразователь с максимально широким диапазоном напряжений как вниз, так и вверх. Дело в том, что для отечественных сетей само слово стандарт может вызвать только смех сквозь слезы. Если пониженное напряжение приведет, скорее всего, к отключению частотного преобразователя, то повышенное может вызвать взрыв сетевых электролитических конденсаторов и входу прибора из строя.
По диапазону регулировки частоты
По количеству входов управления
Дискретные входы нужны для ввода команд управления ( пуск, стоп, реверс, торможение и т.д.). Аналоговые входы необходимы для ввода сигналов обратной связи (регулировки и настройки привода в процессе работы). Цифровые входы нужны для ввода высокочастотных сигналов от цифровых датчиков скорости и положения (энкодеров). Количество входов много не бывает, но чем больше входов, тем сложнее систему можно построить, и тем она дороже.
По количеству выходных сигналов
Дискретные выходы используются для выхода сигналов о различных событиях (авария, перегрев, входное напряжение выше или ниже уровня, сигнал ошибки ит.д.). Аналоговые выходы используются для построения сложных систем с обратными связями. Рекомендации по выбору аналогичны предыдущему пункту.
По шине управления
Оборудование, с помощью которого вы будете управлять частотным преобразователем должно иметь ту же шину и количество входов выходов что и выбранный вами частотный преобразователь. Предусмотрите некоторый запас по входам и выходам для дальнейшей модернизации.
По сроку гарантии
Срок гарантии косвенно позволяет оценить надежность частотного преобразователя. Естественно, нужно выбирать частотный преобразователь с большим сроком. Некоторые производители оговаривают особо случаи поломок, которые не являются гарантийными. Всегда тщательно читайте документацию и посмотрите в интернете отзывы о моделях и производителях оборудования. Это поможет правильному выбору. Не жалейте денег на качественный сервис и обучение персонала.
Это поможет правильному выбору. Не жалейте денег на качественный сервис и обучение персонала.
По перегрузочным способностям
В первом приближении, мощность частотного преобразователя нужно выбирать на 10-15% больше мощности двигателя. Ток преобразователя должен быть больше номинального тока двигателя и чуть больше тока возможных перегрузок.
В описании на конкретный механизм обычно указывают токи перегрузок и длительность их протекания. Читайте документацию! Это вас развлечет, и возможно, обезопасит от поломок оборудования в будущем. Если для привода характерны еще и ударные (пиковые) нагрузки (нагрузки в течении 2-3 сек), то необходимо выбрать преобразователь по пиковому току. Опять возьмите запас 10%.
Популярные товары
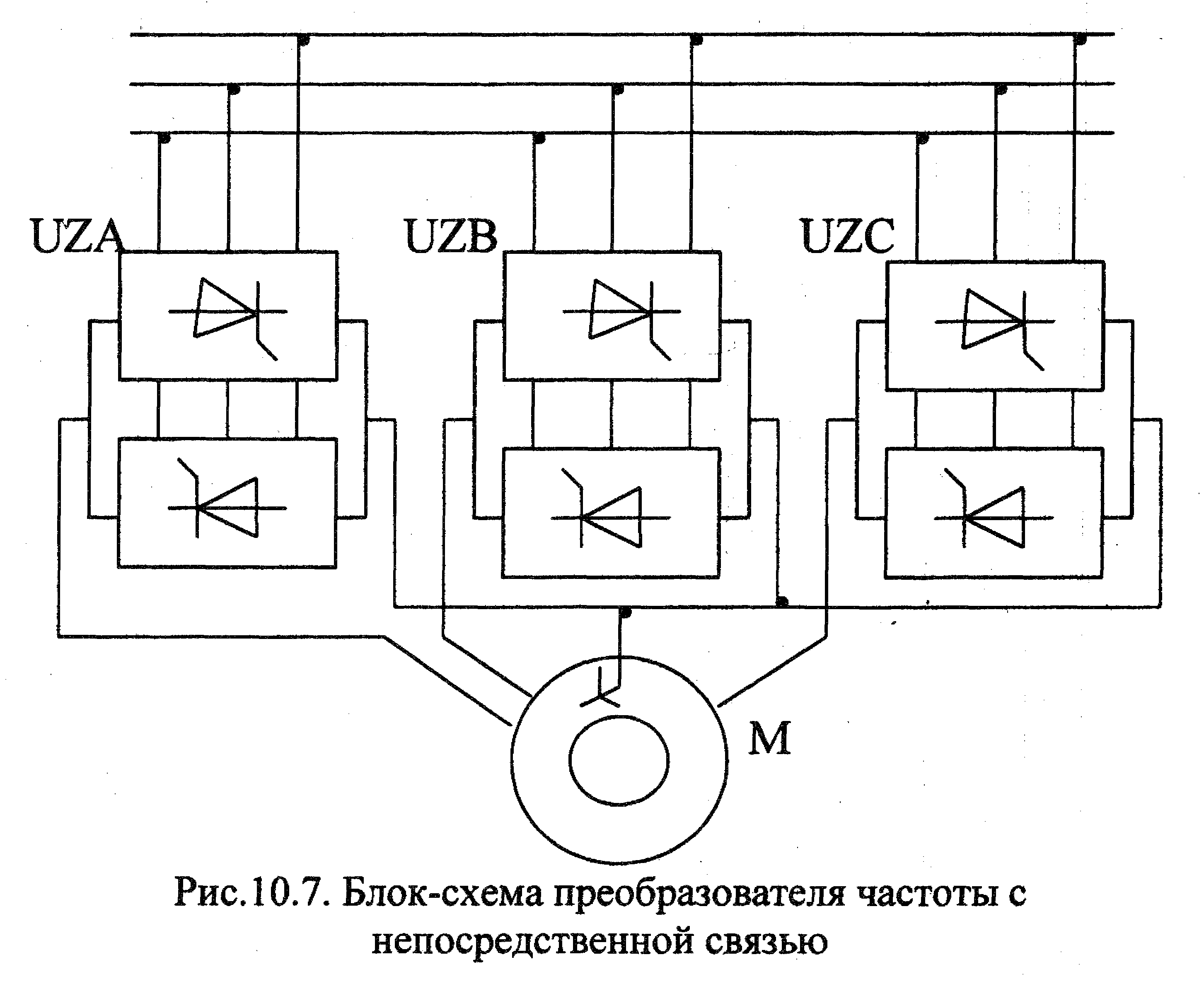
— Импульсного инвертора. Силовой трехфазный инвертор обычно имеет шесть транзисторов-ключей и осуществляет преобразование тока до заданных частот и амплитуд, а затем подает его на статор.
Инвертор может состоять из тиристорной схемы.
Каков принцип частотных методов регулирования? Наглядное объяснение можно вывести из следующей формулы
Высокие показатели КПД, коэффициента мощности, перегрузочной способности достигаются при одновременном изменении частоты и напряжения. Законы изменения этих параметров напрямую зависят от момента нагрузки, который может иметь статичный, вентиляторный и обратно пропорциональный скорости вращения характер.
При постоянном моменте нагрузке напряжение на статоре будет регулироваться в пропорциональной зависимости от частоты, что хорошо видно из формулы:
Если момент нагрузки имеет вентиляторный характер, то напряжение будет пропорционально квадрату частоты питающего напряжения.
Ну и моменте нагрузки, который обратно пропорционален скорости получим:
Как видно из вышеописанного при обеспечении одновременного регулирования частоты питающего напряжения и параметров напряжения на статоре частотным преобразователем достигается плавное бесступенчатое регулирование скорости вращения вала двигателя. При этом отсутствие передач позволяет более точно регулировать скорость вращения по заданным пользователем параметрам.
При этом отсутствие передач позволяет более точно регулировать скорость вращения по заданным пользователем параметрам.
Основные достоинства применения регулируемых приводов на предприятиях.
Разница в производительности и эффективности между дросселированием посредством механических средств и применением частотных преобразователей очевидна на следующем рисунке. (схема 1) Из схемы становится ясно, что возрастает экономия ресурсов, а также нивелируются проблемы, связанные с полной потерей динамической мощности потока во время закрытия заслонок, что приводит, по сути, к холостой работе двигателя. Это увеличивает экономическую эффективность частотных преобразователей.
Конструкция типового частотного преобразователя.
Принципиальной задачей преобразователя частоты является изменение параметров электрического тока, это осуществляется при помощи транзисторного выпрямления тока и преобразования его до необходимых заданных значений. Типовой частотный преобразователь состоит из трех частей:
Типовой частотный преобразователь состоит из трех частей:
— Звено постоянного тока. Состоит из выпрямителя и фильтрационных устройств. Звено постоянного тока принимает входной сигнал и перенаправляет его в инвертор.
— Импульсного инвертора. Силовой трехфазный инвертор обычно имеет шесть транзисторов-ключей и осуществляет преобразование тока до заданных частот и амплитуд, а затем подает его на статор. Инвертор может состоять из тиристорной схемы.
— Микропроцессорной системы управления. Управляет системами преобразования и защиты преобразователя.
Четкая синусоида выходного сигнала – результат работы IGBT-транзисторов в качестве ключей инвертора, которые работают с более высокой частотой переключения, чем устаревшие тиристоры.
Как работает частотный преобразователь?
Схема преобразователя представлена в наглядном виде на следующем рисунке. (схема 2)
Алгоритм переключения вентилей задается микропроцессором, переключение преобразует постоянное Uвх. в переменное выходное напряжение с прямоугольными импульсами. Активная составляющая токового потока асинхронного двигателя проходит через транзисторы, а реактивная – через диоды обратного тока.
в переменное выходное напряжение с прямоугольными импульсами. Активная составляющая токового потока асинхронного двигателя проходит через транзисторы, а реактивная – через диоды обратного тока.
И – трехфазный мостовой инвертор;
В – трехфазный мостовой выпрямитель;
По сроку гарантии
Краткое описание назначения, принципа работы и критериев выбора частотного преобразователя, как устройства управления асинхронным электродвигателем.
Асинхронный двигатель с короткозамкнутым ротором является сегодня самым массовым и надежным устройством для привода различных машин и механизмов. Но у каждой медали есть и обратная сторона.
Два основных недостатка асинхронного двигателя – это невозможность простой регулировки скорости вращения ротора, очень большой пусковой ток — в пять, семь раз превышающий номинальный. Если использовать только механические устройства регулирования, то указанные недостатки приводят к большим энергетическим потерям и к ударным механическим нагрузкам. Это крайне отрицательно сказывается на сроке службы оборудования.
Это крайне отрицательно сказывается на сроке службы оборудования.
В результате исследовательских работ в этом направлении родился новый класс приборов, позволивший решить эти проблемы не механическим, а электронным способом.
Частотный преобразователь с широтно–импульсным управлением (ЧП с ШИМ) снижает пусковые токи в 4-5 раз. Он обеспечивает плавный пуск асинхронного двигателя и осуществляет управление приводом по заданной формуле соотношения напряжение / частота.
Частотный преобразователь дает экономию по потреблению энергии до 50%. Появляется возможность включения обратных связей между смежными приводами, т.е. самонастройки оборудования под поставленную задачу и изменение условий работы всей системы.
Принцип работы частотного преобразователя
Частотный преобразователь с ШИМ представляет собой инвертор с двойным преобразованием напряжения. Сначала сетевое напряжение 220 или 380 В выпрямляется входным диодным мостом, затем сглаживается и фильтруется с помощью конденсаторов.
Это первый этап преобразования. На втором этапе из постоянного напряжения, с помощью микросхем управления и выходных мостовых IGBT ключей, формируется ШИМ последовательность определенной частоты и скважности. На выходе частотного преобразователя выдаются пачки прямоугольных импульсов, но за счет индуктивности обмоток статора асинхронного двигателя, они интегрируются и превращаются наконец в напряжение близкое к синусоиде.
Критерии выбора частотных преобразователей
Выбор по функциям Каждый производитель пытается обеспечить себе конкурентное превосходство на рынке. Первое правило для обеспечения максимума продаж – это низкая цена. Поэтому производитель стремиться включить в свое изделие только необходимые функции. А остальные предлагает в качестве опций. Прежде чем купить частотный преобразователь, определитесь, какие функции вам нужны. Стоит выбирать тот прибор, который имеет большинство необходимых функций в базовом варианте.
По способу управления
Сразу отбрасывайте те преобразователи, которые не подходят по мощности, типу исполнения, перегрузочной способности и т. д. По типу управления, нужно определиться, что выбрать, скалярное или векторное управление.
д. По типу управления, нужно определиться, что выбрать, скалярное или векторное управление.
Большинство современных частотных преобразователей реализуют векторное управление, но такие частотные преобразователи дороже, чем частотные преобразователи со скалярным управлением.
Векторное управление дает возможность более точного управления, снижая статическую ошибку. Скалярный режим только поддерживает постоянное соотношение между выходным напряжение и выходной частотой, но например, для вентиляторов это вполне достаточно.
Векторное управление, начиная с момента его появления, стало чрезвычайно популярной стратегией управления асинхронными электродвигателями. В настоящее время большинство частотных преобразователей реализуют векторное управление или лаже векторное бездатчиковое управление (этот тренд встречается в частотных преобразователях, первоначально реализующих скалярное управление и не имеющих клемм для подключения датчика скорости).
Основной принцип векторного управления состоит в раздельном независимом регулировании тока намагничивания двигателя и квадратурного тока, которому пропорционален механический момент на валу.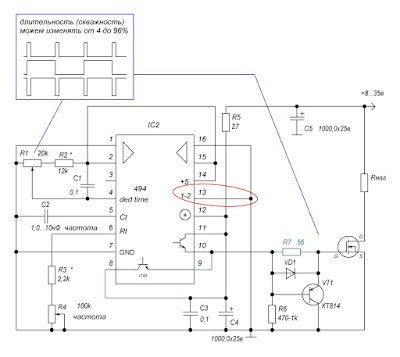 Ток намагничивания определяет величину потокосцепления ноля ротора и поддерживается постоянным.
Ток намагничивания определяет величину потокосцепления ноля ротора и поддерживается постоянным.
В случае стабилизации скорости вращения уставка квадратурного тока вырабатывается с помощью отдельного ПИ-регулятора, входом которого является рассогласование между желаемой и измеренной скоростью вращения двигателя. Таким образом, квадратурный ток всегда устанавливается на минимальном уровне так, чтобы обеспечить достаточный для поддержания заданной скорости механический момент. За счет этого векторное управление обладает высокой энергетической эффективностью.
Если мощности оборудования примерно одинаковы, то выбирайте преобразователи одной фирмы с мощностью по мощности максимальной нагрузки. Так вы обеспечите взаимозаменяемость и упростите обслуживание оборудования. Желательно, чтобы сервис центр выбранного частотного преобразователя был в вашем городе.
По сетевому напряжению
Всегда выбирайте преобразователь с максимально широким диапазоном напряжений как вниз, так и вверх. Дело в том, что для отечественных сетей само слово стандарт может вызвать только смех сквозь слезы. Если пониженное напряжение приведет, скорее всего, к отключению частотного преобразователя, то повышенное может вызвать взрыв сетевых электролитических конденсаторов и входу прибора из строя.
Дело в том, что для отечественных сетей само слово стандарт может вызвать только смех сквозь слезы. Если пониженное напряжение приведет, скорее всего, к отключению частотного преобразователя, то повышенное может вызвать взрыв сетевых электролитических конденсаторов и входу прибора из строя.
По диапазону регулировки частоты
По количеству входов управления
Дискретные входы нужны для ввода команд управления (пуск, стоп, реверс, торможение и т.д.). Аналоговые входы необходимы для ввода сигналов обратной связи (регулировки и настройки привода в процессе работы). Цифровые входы нужны для ввода высокочастотных сигналов от цифровых датчиков скорости и положения (энкодеров). Количество входов много не бывает, но чем больше входов, тем сложнее систему можно построить, и тем она дороже.
По количеству выходных сигналов
Дискретные выходы используются для выхода сигналов о различных событиях (авария, перегрев, входное напряжение выше или ниже уровня, сигнал ошибки ит.д. ). Аналоговые выходы используются для построения сложных систем с обратными связями. Рекомендации по выбору аналогичны предыдущему пункту.
). Аналоговые выходы используются для построения сложных систем с обратными связями. Рекомендации по выбору аналогичны предыдущему пункту.
По шине управления
Оборудование, с помощью которого вы будете управлять частотным преобразователем должно иметь ту же шину и количество входов выходов что и выбранный вами частотный преобразователь. Предусмотрите некоторый запас по входам и выходам для дальнейшей модернизации.
По сроку гарантии
Срок гарантии косвенно позволяет оценить надежность частотного преобразователя. Естественно, нужно выбирать частотный преобразователь с большим сроком. Некоторые производители оговаривают особо случаи поломок, которые не являются гарантийными. Всегда тщательно читайте документацию и посмотрите в интернете отзывы о моделях и производителях оборудования. Это поможет правильному выбору. Не жалейте денег на качественный сервис и обучение персонала.
По перегрузочным способностям
В первом приближении, мощность частотного преобразователя нужно выбирать на 10-15% больше мощности двигателя. Ток преобразователя должен быть больше номинального тока двигателя и чуть больше тока возможных перегрузок.
Ток преобразователя должен быть больше номинального тока двигателя и чуть больше тока возможных перегрузок.
В описании на конкретный механизм обычно указывают токи перегрузок и длительность их протекания. Читайте документацию! Это вас развлечет, и возможно, обезопасит от поломок оборудования в будущем. Если для привода характерны еще и ударные (пиковые) нагрузки (нагрузки в течении 2-3 сек), то необходимо выбрать преобразователь по пиковому току. Опять возьмите запас 10%.
Смотрите также по этой теме: Частотные преобразователи VLT AQUA Drive для насосных установок
Сделайте небольшой донат на развитие сайта «Школа для электрика»!
Основными элементами частотного преобразователя являются силовая часть (преобразователь электрической энергии) и управляющее устройство (контроллер). Современные частотные преобразователи обычно имеют модульную архитектуру, что позволяет расширять возможности устройства. Также зачастую имеется возможность установки дополнительных интерфейсных модулей и модулей расширения каналов ввода/вывода.

Конструкция частотного преобразователя
Основными элементами частотного преобразователя являются силовая часть (преобразователь электрической энергии) и управляющее устройство (контроллер). Современные частотные преобразователи обычно имеют модульную архитектуру, что позволяет расширять возможности устройства. Также зачастую имеется возможность установки дополнительных интерфейсных модулей и модулей расширения каналов ввода/вывода.
В современных моделях данного устройства на выходе частотность может варьироваться в различных диапазонах. Данный показатель может быть на порядок ниже или выше частотности сети электропитания.
Частотный преобразователь и его устройство
Чаще устройство основано на схеме двойного преобразования. Данный прибор содержит:
- Постоянный ток и его звенья, состоящие из выпрямителя неуправляемого типа и защитных фильтров.
- Инвертор импульсный силового типа состоит из 6 ключей транзистора, подключается к соответственной обмотке агрегата.
- Налаженная систематизация преобразователя.
На первом этапе переменное напряжение электрической сети переходит в постоянное. Далее перейдя в инвертор, происходит преобразование в 3-х фазную переменную величину, необходимой амплитуды и величины.
Также данные устройства бывают с промежуточным звеном (связью) и без него. О характере работы таких устройств читайте тут, в ещё одной нашей статье.
Настройка
Настройка преобразователей выполняется строго по инструкции производителя и с учетом особенностей задачи, которая решается посредством оборудования, в котором установлен двигатель.
Например, если применяется асинхронный двигатель скалярного типа, то амплитуду сигнала и выходную частоту устанавливают по определенной формуле. Для других видов двигателя обычно используют датчики скорости вращения вала двигателя. Последовательность этапов алгоритма настройки мы перечислили здесь, в другом нашем материале.
Более эффективным является второй способ.
При широтноимпульсном способе регулирования (рис. 8) возможно не только регулирование среднего напряжения за период, но и коррекция формы выходного напряжения U1. Такое регулирование называют широтно-импульсной модуляцией (ШИМ). Она основана на принципе широтно-импульсного регулирования.
Принцип работы частотного преобразователя
Рис. 6. Схема частотного асинхронного электропривода с транзисторным инвертором напряжения
Рис. 7. Диаграмма работы ключей VT1. VT6 и эпюры линейного и фазного напряжений
Рис. 8. График, поясняющий принцип широтно-импульсной модуляции напряжения и тока фазы автономного инвертора напряжения:
U1, I1 — фазные соответственно напряжение и ток статора; Ud — напряжение
питания; Tk — период ШИМ; T — период частоты выходного напряжения
зам а и с и по фазе в и т. д. Линейное U ав и фазное U а напряжения, прикладываемые к обмоткам двигателя, будут иметь форму, показанную на рис. 7.
д. Линейное U ав и фазное U а напряжения, прикладываемые к обмоткам двигателя, будут иметь форму, показанную на рис. 7.
Требуемая выходная частота определяется частотой переключения вентилей инвертора и задается каналом регулирования частоты. Регулирование выходного напряжения может выполняться двумя способами:
1) посредством управляемого выпрямителя на входе инвертора, с помощью которого регулируется Ud‘,
2) использованием способа широтно-импульсного регулирования, осуществляемого вентилями инвертора; в этом случае входной выпрямитель может быть неуправляемым.
Первый способ характеризуется двумя недостатками: ступенчатой формой выходного напряжения (см. рис. 7) и низким коэффициентом мощности преобразователя.
Более эффективным является второй способ. При широтноимпульсном способе регулирования (рис. 8) возможно не только регулирование среднего напряжения за период, но и коррекция формы выходного напряжения U1. Такое регулирование называют широтно-импульсной модуляцией (ШИМ). Она основана на принципе широтно-импульсного регулирования.
Такое регулирование называют широтно-импульсной модуляцией (ШИМ). Она основана на принципе широтно-импульсного регулирования.
Так как при двухполярной коммутации выходное напряжение преобразователя
то, регулируя непрерывно скважность у по синусоидальному закону
можно получить среднее фазное напряжение, также изменяющееся по синусоиде.
Изменяя с помощью системы управления амплитуду U1 можно регулировать выходное напряжение преобразователя.
При использовании инверторов напряжения для реализации режима рекуперативного торможения асинхронного двигателя необходимо на входе устанавливать реверсивный преобразователь с двумя группами вентилей, что усложняет схему преобразователя и снижает ее надежность. Поэтому в инверторах напряжения обычно предусматривают разрядный резистор R (см. рис. 6), который подключается в режиме торможения транзисторным ключом VT7 и в котором рассеивается энергия торможения.
Существует большое число разновидностей схем преобразователей частоты с автономными инверторами тока и напряжения, которые описаны в соответствующей литературе.
Особый экономический эффект от использования преобразователей частоты дает применение частотного регулирования на объектах, обеспечивающих транспортировку жидкостей. До сих пор самым распространённым способом регулирования производительности таких объектов является использование задвижек или регулирующих клапанов, но сегодня доступным становится частотное регулирование асинхронного двигателя, приводящего в движение, например, рабочее колесо насосного агрегата или вентилятора.
Частотник в комплекте с асинхронным электродвигателем позволяет заменить электропривод постоянного тока. Системы регулирования скорости двигателя постоянного тока достаточно просты, но слабым местом такого электропривода является электродвигатель. Он дорог и ненадежен. При работе происходит искрение щеток, под воздействием электроэрозии изнашивается коллектор. Такой электродвигатель не может использоваться в запыленной и взрывоопасной среде.
Такой электродвигатель не может использоваться в запыленной и взрывоопасной среде.
Асинхронные электродвигатели превосходят двигатели постоянного тока по многим параметрам: они просты по устройству и надежны, так как не имеют подвижных контактов. Они имеют меньшие по сравнению с двигателями постоянного тока размеры, массу и стоимость при той же мощности. Асинхронные двигатели просты в изготовлении и эксплуатации.
Известно, что регулирование частоты вращения исполнительных механизмов можно осуществлять при помощи различных устройств: механических вариаторов, гидравлических муфт, дополнительно вводимыми в статор или ротор резисторами, электромеханическими преобразователями частоты, статическими преобразователями частоты.
Применение первых четырех устройств не обеспечивает высокого качества регулирования скорости, неэкономично, требует больших затрат при монтаже и эксплуатации. Статические преобразователи частоты являются наиболее совершенными устройствами управления асинхронным приводом в настоящее время.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту f1 питающего напряжения, можно в соответствии с выражением
неизменном числе пар полюсов p изменять угловую скорость магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
Регулирование скорости при этом не сопровождается увеличением скольжения асинхронного двигателя, поэтому потери мощности при регулировании невелики. Для получения высоких энергетических показателей асинхронного двигателя – коэффициентов мощности, полезного действия, перегрузочной способности – необходимо одновременно с частотой изменять и подводимое напряжение.
Закон изменения напряжения зависит от характера момента нагрузки Mс . При постоянном моменте нагрузки Mс=const напряжение на статоре должно регулироваться пропорционально частоте:
Для вентиляторного характера момента нагрузки это состояние имеет вид:
При моменте нагрузки, обратно пропорциональном скорости:
Таким образом, для плавного бесступенчатого регулирования частоты вращения вала асинхронного электродвигателя, преобразователь частоты должен обеспечивать одновременное регулирование частоты и напряжения на статоре асинхронного двигателя.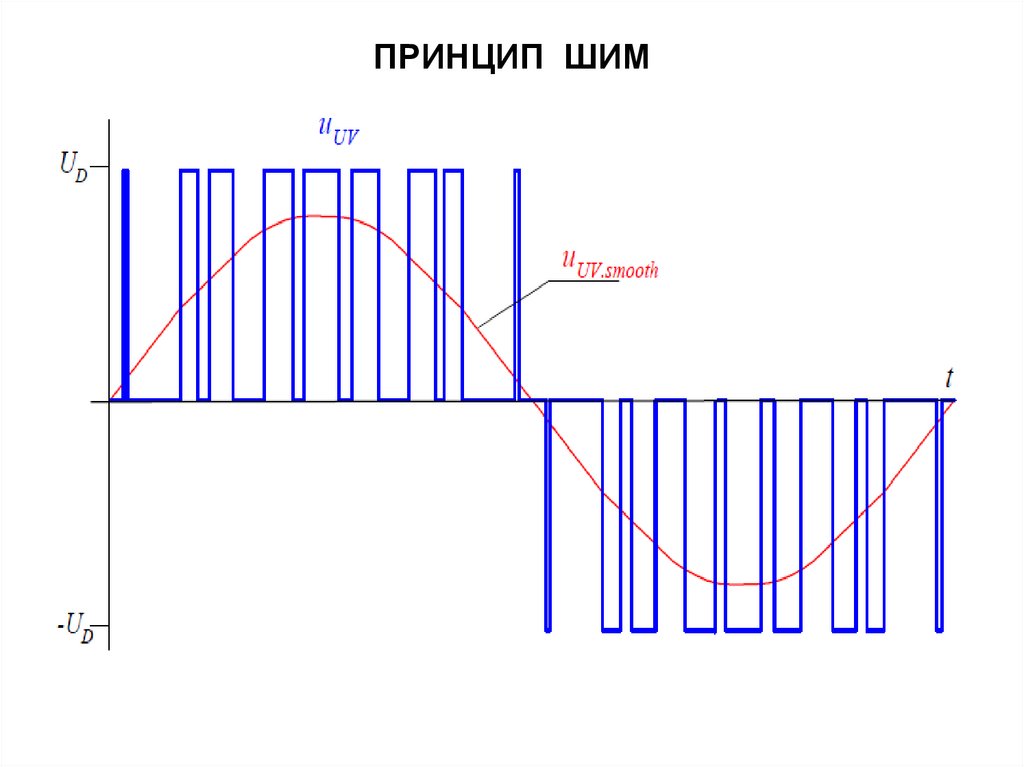
Преимущества использования регулируемого электропривода в технологических процессах
Применение регулируемого электропривода обеспечивает энергосбережение и позволяет получать новые качества систем и объектов. Значительная экономия электроэнергии обеспечивается за счет регулирования какого-либо технологического параметра. Если это транспортер или конвейер, то можно регулировать скорость его движения. Если это насос или вентилятор – можно поддерживать давление или регулировать производительность. Если это станок, то можно плавно регулировать скорость подачи или главного движения.
Особый экономический эффект от использования преобразователей частоты дает применение частотного регулирования на объектах, обеспечивающих транспортировку жидкостей. До сих пор самым распространённым способом регулирования производительности таких объектов является использование задвижек или регулирующих клапанов, но сегодня доступным становится частотное регулирование асинхронного двигателя, приводящего в движение, например, рабочее колесо насосного агрегата или вентилятора.
Перспективность частотного регулирования наглядно видна из рисунка 1
Таким образом, при дросселировании поток вещества, сдерживаемый задвижкой или клапаном, не совершает полезной работы. Применение регулируемого электропривода насоса или вентилятора позволяет задать необходимое давление или расход, что обеспечит не только экономию электроэнергии, но и снизит потери транспортируемого вещества.
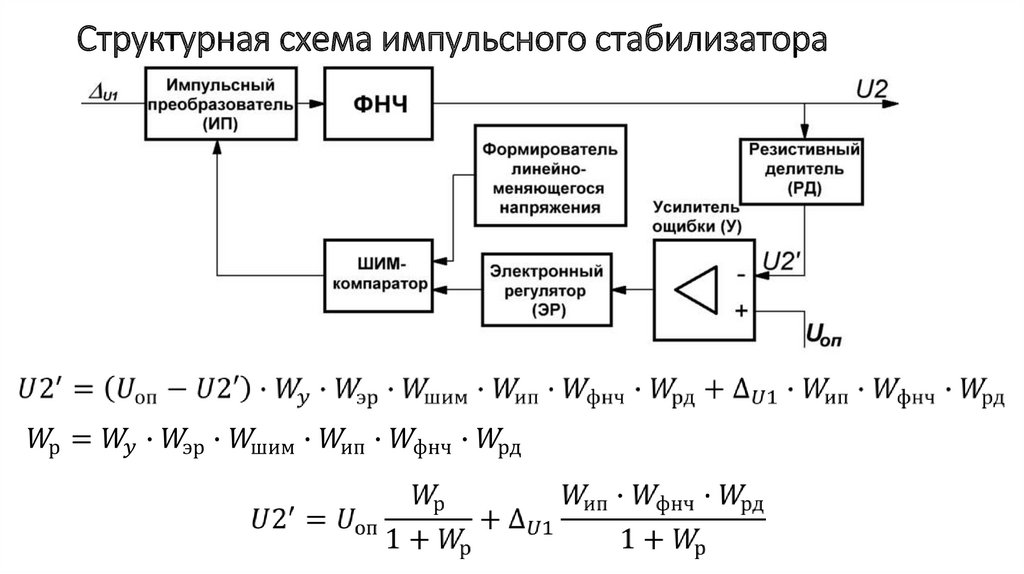
Структура частотного преобразователя
Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями.
Принцип работы преобразователя частоты
Преобразователь частоты состоит из неуправляемого диодного силового выпрямителя В, автономного инвертора , системы управления ШИМ, системы автоматического регулирования, дросселя Lв и конденсатора фильтра Cв (рис. 2). Регулирование выходной частоты fвых. и напряжения Uвых осуществляется в инверторе за счет высокочастотного широтно-импульсного управления.
2). Регулирование выходной частоты fвых. и напряжения Uвых осуществляется в инверторе за счет высокочастотного широтно-импульсного управления.
Широтно-импульсное управление характеризуется периодом модуляции, внутри которого обмотка статора электродвигателя подключается поочередно к положительному и отрицательному полюсам выпрямителя.
Длительность этих состояний внутри периода ШИМ модулируется по синусоидальному закону. При высоких (обычно 2…15 кГц) тактовых частотах ШИМ, в обмотках электродвигателя, вследствие их фильтрующих свойств, текут синусоидальные токи.
Таким образом, форма кривой выходного напряжения представляет собой высокочастотную двухполярную последовательность прямоугольных импульсов (рис. 3). Частота импульсов определяется частотой ШИМ, длительность (ширина) импульсов в течение периода выходной частоты АИН промодули-рована по синусоидальному закону. Форма кривой выходного тока (тока в обмотках асинхронного электродвигателя) практически синусоидальна.
Регулирование выходного напряжения инвертора можно осуществить двумя способами: амплитудным (АР) за счет изменения входного напряжения Uв и широтно-импульсным (ШИМ) за счет изменения программы переключения вентилей V1-V6 при Uв = const.
Второй способ получил распространение в современных преобразователях частоты благодаря развитию современной элементной базы (микропроцессоры, IBGT-транзисторы). При широтно-импульсной модуляции форма токов в обмотках статора асинхронного двигателя получается близкой к синусоидальной благодаря фильтрующим свойствам самих обмоток.
Такое управление позволяет получить высокий КПД преобразователя и эквивалентно аналоговому управлению с помощью частоты и амплитуды напряжения. Современные инверторы выполняются на основе полностью управляемых силовых полупроводниковых приборов – запираемых GTO – тиристоров, либо биполярных IGBT-транзисторов с изолированным затвором. На рис. 2.45 представлена 3-х фазная мостовая схема автономного инвертора на IGBT-транзисторах.
Она состоит из входного емкостного фильтра Cф и шести IGBT-транзисторов V1-V6 включенными встречно-параллельно диодами обратного тока D1-D6.
За счет поочередного переключения вентилей V1-V6 по алгоритму, заданному системой управления, постоянное входной напряжение Uв преобразуется в переменное прямоугольно-импульсное выходное напряжение. Через управляемые ключи V1-V6 протекает активная составляющая тока асинхронного электродвигателя, через диоды D1-D6 – реактивная составляющая тока.
И – трехфазный мостовой инвертор;
В – трехфазный мостовой выпрямитель;
Сф – конденсатор фильтра;
Большая часть инвертеров частоты позволяют программировать работу оборудования. Но, задать программу просто с пульта управления не получится. Для этого используется интерфейс передачи данных и настройки, который, при помощи компьютера позволяет задать нужную программу работы.
Электромагнитная совместимость преобразователей частоты
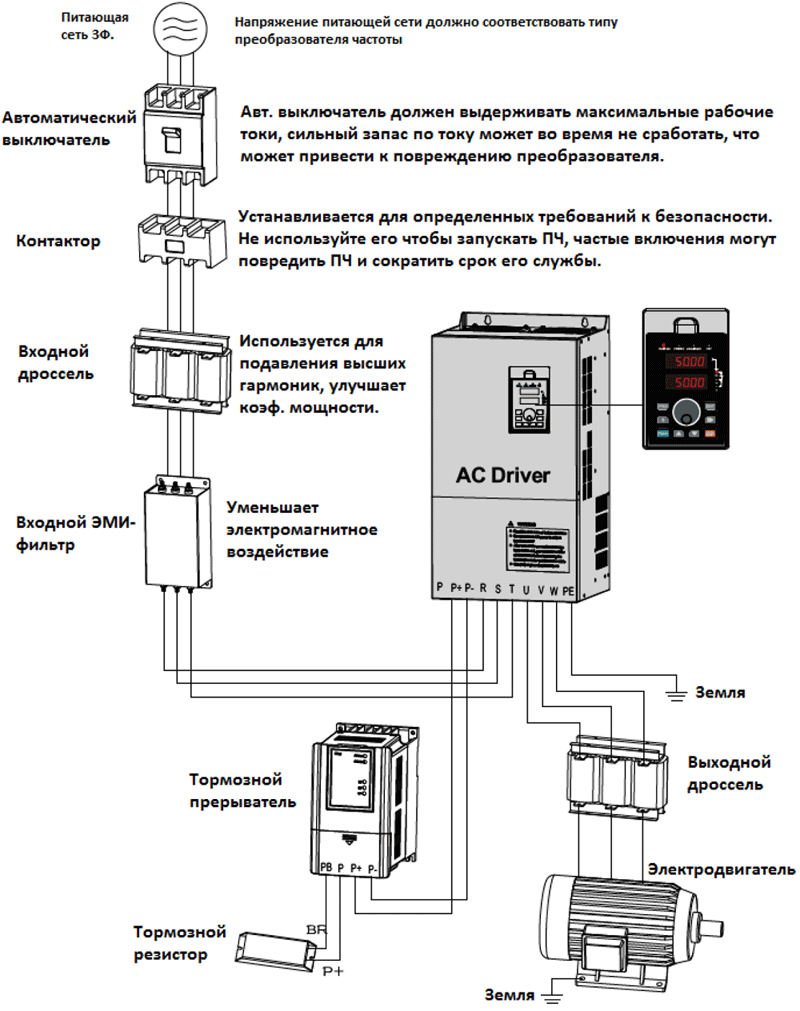
При расчёте и подключении частотника к сети и электрическому двигателю, следует помнить, что он очень подвержен помехам. Также, преобразователь частоты может и сам стать источником помех для другого оборудования. Именно поэтому, все подключения к частотнику и от него выполняются экранированными кабелями и выдерживанием дистанции в 10 см друг от друга.
Также, преобразователь частоты может и сам стать источником помех для другого оборудования. Именно поэтому, все подключения к частотнику и от него выполняются экранированными кабелями и выдерживанием дистанции в 10 см друг от друга.
По своей сути, применение частного преобразователя для питания асинхронного электрического двигателя позволило существенно продлить жизнь электрического двигателя, дало возможность регулировать работу двигателя и хорошо экономить на расходе электрической энергии.
Источники
Источник — http://for-engineer.info/hydraulics/klassifikaciya-i-princip-raboty-gidroprivodov.html
Источник — http://www.autodela.ru/main/blogs/Ira_Avto/princip-raboty-gidroprivoda
Источник — http://www.gidroprivod-razn.ru/gidravlika/gidroprivodi-printsip-raboti-charakteristika-i-klassifikatsiya
Источник — http://drives.ru/stati/princip-raboty-chastotnikakh-dlya-asinhronnyh-dvigatelej/
Источник — http://en-res.ru/stati/princip-raboty-chastotnogo-preobrazovatelya-st8. html
html
Источник — http://www.maxprofi.su/stati-i-obzory/princip-raboty-chastotnogo-preobrazovatelya-sxema-chastotnogo-privoda/
Источник — http://electricalschool.info/spravochnik/eltehustr/726-princip-raboty-chastotnogo.html
Источник — http://engineering-solutions.ru/motorcontrol/vfd/
Источник — http://www.ruselt.ru/articles/chastotnyy-preobrazovatel-ustroystvo-i-printsip-raboty/
Источник — http://www.ruselt.ru/articles/preobrazovatel-chastoty-chto-takoe/
Источник — http://www.artesk.ru/invertor_shema.html
Источник — http://www.technowell.ru/info/articles/osnovnye-svedeniya-o-chastotno-reguliruemom-elektroprivode-/
Источник — http://chistotnik.ru/chastotnye-preobrazovateli-dlya-asinhronnyh-dvigatelej.html
Чому співає і гріється частотники ?. Статті компанії «RTS-Ukraine
Все почалося з того, коли замовник поскаржився на дивний, мінливий свист двигуна, який спостерігався при роботі ПЧ Delta Electronics C2000.
Виглядало це приблизно так:
Пояснивши замовнику, що на виході ПЧ насправді не синусоїда 15Гц, а широтно-модульовані імпульси або ШІМ, з опорною частотою, що лежить в області звукового спектру, можна було б і зупинитися:
Рис. 1. У вікіпедії це виглядає так. Напруга V на двигуні і магнітна індукція У статора.
Дійсно, базову частоту ШІМ (синіх коротких імпульсів на рис. 1) можна встановити в ПЧ VFD-C2000 параметром 00-17 в діапазоні від 2 гц до 15 кГц і все це звукові діапазони.
Постійний струм в магнітному полі породжує постійну силу Ампера, змінний — змінну, а струм звукової частоти — силу змінюється з частотою в області чутного спектру.
У перетворювачі досить моткових виробів з струмами звукових частот, крім того, таким моточным виробом є сам двигун. Як би не були добре прикріплені обмотки, дане кріплення має кінцевою твердістю, тому згадана вище сила Ампера викличе їх переміщення зі звуковою частотою, і, отже звукову хвилю.
Як би не були добре прикріплені обмотки, дане кріплення має кінцевою твердістю, тому згадана вище сила Ампера викличе їх переміщення зі звуковою частотою, і, отже звукову хвилю.
Звукову хвилю і викличе зміна геометричних розмірів феромагнітних осердь, статора двигуна зокрема, в результаті магнітострикційного ефекту, причому швидше за все більшої інтенсивності зважаючи більшої площі поверхні випромінювання.
Таким чином повністю позбутися від звуку не вийде,хоча потрібно віддати належне деяким закордонним виробникам двигунів для частотного регулювання, які майже не шумлять. З іншого боку, характер звуку буде визначатися вибором несучої частоти ШІМ,тут слід враховувати, що далеко не кожен чує звуки вище 15 кГц, більше того, з віком звуки вище 10-12 кГц взагалі перестають бути чутні. Тому, чим вище вибираємо частоту ШІМ, тим менше неприємних звукових відчуттів. Деякі виробники вдаються до різних хитрощів, знижуючи суб’єктивні відчуття від свисту частотника, підмішуючи в несучу ШІМ випадкову складову, але суті це не міняє, звук роботи при 2-х кГц і при 10 кГц — це дві великі різниці.
Але повертаючись до випадку з нашим Замовником, з’ясувалося, яку частоту ШІМ не вибирай, все одно двигун починає свистіти по-особливому при завданні частот обертання нижче 15-20 Гц. Більш того, цей ефект ми побачили і в інших серіях перетворювачів частоти Delta Electronics :
Проведені експерименти показали, що перетворювач частоти примусово скидає опорну частоту ШІМ до мінімальної, при переході порогу в ~ 15 Гц, незалежно від установок параметра 00-17, причому робить це з гістерезисом.
Але навіщо?
Доведеться занурюватися глибше. Постараємося це зробити не зловживаючи формулами.
Основна схемотехніка практично всіх ПЧ низької напруги, незалежно від бренду абсолютно однакова:
Рис 2. Блок схема низької напруги ПЧ
На вході ПЧ знаходиться діодний випрямляч, потім фільтр, що згладжує пульсації (L є не у всіх частотниках), і власне, інвертор, зібраний за мостовою схемою на IGBT транзисторах. При цьому напруга на конденсаторі фільтра в режимі холостого ходу дорівнює амплітудному значенню напруги мережі:
При цьому напруга на конденсаторі фільтра в режимі холостого ходу дорівнює амплітудному значенню напруги мережі:
Vdd =(380±10%) * 1.414 = 537±10% В
Транзистори мосту працюють у ключовому режимі, що означає, що перетворювач вміє видавати на вихід або +Vdd, або -Vdd, в залежності від того, який транзистор мосту відкрито. Ситуація, при якій обидва транзистора відкриті не допускається, так як призводить до короткого замикання, за цим стежить драйвер, або схема управління, що формує ШІМ.
Ключовий режим роботи транзисторів має високий ККД, оскільки потужність, що розсіюється на транзисторі у відкритому і закритому стані прагне до нуля, якщо параметри транзисторів прагнуть до ідеальних, оскільки в будь-який момент часу або напруга на ключі, або струм через нього прагнуть до нуля:
Рис 3. Струми, напруги і втрати при ідеальних ключах
Але справа в тому, що ідеальних IGBT транзисторів ще не придумали, і насправді осцилограми струму і напруги на IGBT містять значні ділянки з ненульовими і струмами і напругами і виглядають так:
Рис 4. Осцилограми струмів і напруг реальних ключів
Осцилограми струмів і напруг реальних ключів
По-перше,у відкритому стані на IGBT залишається невелика залишкова напруга, якого однак достатньо, щоб на транзисторі розвіювався помітна потужність рівна U*I, так як через транзистор тече повний струм ПЧ.
По-друге транзистор не вміє миттєво відкриватися і закриватися, тому існують моменти часу під час перемикання , коли струм і напруга значні, навіть перевищують 50% максимальних, що призводить до значних цифр, кіловата миттєвої потужності, що розсіюється навіть на невеликих ПЧ. Графіки миттєвої потужності, що розсіюється p(t) і втрат енергії E наведені нижче.
Рис 5. Струми, напруги, потужність та енергія втрат на включення, провідність і вимикання ключа
Очевидно, що загальні усереднені втрати в транзисторі IGBT дорівнюють втратам на включення плюс втрати, пов’язані з кінцевою провідністю відкритого ключа IGBT, плюс втрати на вимикання:
P = Pon+Pcond+Poff
де:
Pon, Poff — втрати потужності на включення і виключення
Pcond — втрати потужності, пов’язані з кінцевою провідністю відкритого переходу IGBT.
Площа під кривою P(t) дорівнює енергії втрат E, виділяється у вигляді тепла і наочно показує, що наскільки істотний внесок вносять перемикання. Енергія втрат, що виділяється за час комутації на порядки перевершує енергію втрат, що виділяється за аналогічний час з-за кінцевої провідності.
Розгляд втрат в ПЧ було б не повним без розгляду одного уявного парадоксу. Яким чином при закритому транзисторі мосту і обірваної ланцюга струм двигуна не переривається ? Чому індукція і струм фази ( див. рис 1) носить безперервний характер, а струм у IGBT — зобов’язаний бути переривчастим, коли ми його весь час відкриваємо і закриваємо за допомогою ШІМ? Це ж ніби послідовний ланцюг (рис 3) ?
Парадокс легко вирішується, якщо згадати, що індуктивність і називається індуктивністю за здатність індукувати напруга.
Рис 6. Ланцюг струму фази при відкритих ключах мосту
Для простоти уявімо, що в якийсь момент часу були включені тільки два ключа, VT1 і VT4. Джерелом напруги, що підтримує струм в ланцюзі, по суті справи буде разряжающийся силовий конденсатор фільтра, який весь час заряджається імпульсами від випрямляча мережі.
Джерелом напруги, що підтримує струм в ланцюзі, по суті справи буде разряжающийся силовий конденсатор фільтра, який весь час заряджається імпульсами від випрямляча мережі.
Нехай контролер управління, у відповідності з законом широтно-імпульсної модуляції дав сигнал на відключення VT1 і VT4 і вони почали закриватися.
Рис 7. Ланцюг струму фази при закритих ключах мосту
Струм через двигун, природно, починає падати, але тут у гру вступає індуктивність двигуна, яка з усіх сил, обмежених тільки раніше запасеної енергією поля, прагне запобігти це падіння і індукує проти ерс E, яке тут же перевищує значення ланки постійного струму Vdd, що призводить до відкриття демпфуючих діодів, через які починає заряджатися конденсатор — ланцюг замикається,струм через обмотку двигуна продовжує текти і текти в тому ж напрямку.
Таким чином демпфуючі діоди, незважаючи на назву, в цьому додатку — такий же важливий струмоведучий елемент, як і IGBT і діоди вхідного мосту через них проходить основна «сила». Тому і втрати на них істотні.
Тому і втрати на них істотні.
Так само, як і на IGBT, на діодах залишається залишкове напруга відкритого переходу, яке призводить до кондуктивним втрат. Але з кондуктивними втратами можна боротися, для цього , наприклад Дельта, відкриває в моменти провідності діода і шунтируемый їм транзистор, який бере на себе свою частку струму.
Але діод, так само як і IGBT, не може миттєво перестати проводити при реверсі полярності. Це пов’язано з тим, що містить діод накопичений заряд, який спочатку повинен розсмоктатися. Цей розряд триває якесь кінцеве час, під час якого струм через діод тече в зворотному напрямку, вже при значному доданому зворотному напрузі, тобто напрямки збігаються, що призводить до розсіювання потужності (U*I) і втрат, які називаються втратами на відновлення діода.
Втрати на відновлення діода можуть досягати половини втрат на перемикання IGBТ, в той-же час втрати на провідність — 15% від втрат на провідність IGBT,що посилює внесок втрат на перемикання в загальні втрати IGBT або температуру радіатора частотника. 2, з компенсацією ковзання або векторному. Зробити він це зобов’язаний ну хоча б для того, щоб не спалити обмотку, індуктивний опір якої падає пропорційно частоті. А для збереження моменту і струму) він повинен це робити пропорційно f,
2, з компенсацією ковзання або векторному. Зробити він це зобов’язаний ну хоча б для того, щоб не спалити обмотку, індуктивний опір якої падає пропорційно частоті. А для збереження моменту і струму) він повинен це робити пропорційно f,
Тому на частотою 15Гц на виході ПЧ має бути чинне значення 380В*15/50 = 114 Ст. При більш «м’яких», квадратичних характеристикою для насосів і вентиляторів, напруга має бути ще менше — 34 Ст.
Але ПЧ може видавати або 537 або нічого, тому 30 В він буде формувати дуже короткими імпульсами, відкриваючи і тут-же закриваючи транзистор. Через необхідність забезпечувати безпечний інтервал запобігання короткого замикання, коли обидва транзистора закриті, ці імпульси стають ще коротше у відносному вираженні. Якщо управління здійснюється за характеристикою U/f і постійному моменті, то комутувати транзистору доведеться практично все той-же повний номінальний струм, незважаючи на знижена напруга. Тому апріорі можна припустити, що при низьких вихідних частотах ПЧ різко зростають втрати на комутацію.
Але остаточно все стає ясно, після аналізу реальних осцилограм на виході ПЧ і моделювання відбувається в Matlab і Simulink, благо всі готові блоки в Matlab є.
Рис 8. Модель втрат у ПЧ (скалярний управління)
В результаті розгляду реальних осцилограм на виході ПЧ С2000 з’ясовується ще одна, далеко не очевидна деталь.
Рис 9. Осцилограма лінійного напруги на виході ПЧ при 50 Гц.
Справа в тому, що цей ПЧ, як і ПЧ VFD-E/EL, за замовчуванням працює з перемодуляцией ШІМ — тобто опорним напругою ШІМ є не просто синусоїда, а синусоїда, пропущена через симетричний обмежувач (рис 10). В результаті, протягом приблизно ⅓ періоду комутації взагалі не відбувається.
Рис 10. Форма опорного напруги для формування ШІМ на 50 Гц.
Режим перемодуляціі, коли ШІМ генератор переходить в насичення, володіє двома перевагами і одним недоліком. У цьому режимі істотно зменшується кількість перемикань ключів в одиницю часу, і, отже, тепловиділення. Крім того, в цьому режимі ПЧ легше протистояти осідань напруги по входу, так як діюче значення напруги, що генерується ШІМ з перемодуляцией помітно підвищується. За це доводиться розплачуватися підвищеним коефіцієнтом гармонік на виході ПЧ. До речі самі останні,»європейські» серії Deta Electronics MS/MH режиму перемодуляціі не мають, так як на чільне місце поставлено суворе відповідність усім європейським стандартам, в тому числі і з електромагнітної сумісності.
Крім того, в цьому режимі ПЧ легше протистояти осідань напруги по входу, так як діюче значення напруги, що генерується ШІМ з перемодуляцией помітно підвищується. За це доводиться розплачуватися підвищеним коефіцієнтом гармонік на виході ПЧ. До речі самі останні,»європейські» серії Deta Electronics MS/MH режиму перемодуляціі не мають, так як на чільне місце поставлено суворе відповідність усім європейським стандартам, в тому числі і з електромагнітної сумісності.
Графіки фазних і лінійних напруг, струмів IGBT і двигуна, отриманих в результаті моделювання для 50 Гц і 20 Гц, наведені нижче.
Рис 10. Фазна і лінійна напруга на виході ПЧ, струм через IGBT і обмотку двигуна при 50 Гц.
Рис 11. Фазна і лінійна напруга на виході ПЧ, струм через IGBT і обмотку двигуна при 20 Гц.
Неозброєним оком видно, як зростає інтенсивність комутації у другому випадку, причому номінал комутованого струму практично колишній.
Результати моделювання теплового режиму ПЧ повністю підтверджують припущення.
Якщо задатися початковою температурою всередині ПЧ 40С і включити його на 50 Гц, то температура корпусів IGBT буде рости як на рис 12.
Рис 12. Температура корпусу IGBT при 50 Гц, fшим = 10 кГц
Видно, що при заданніх параметрах радіатора, тепловий баланс встановлюється приблизно при 67С.
Якщо ж стартувати на 20 Гц, картина різко змінюється:
Рис 13. Температура корпусу IGBT при 20 Гц, fшим = 10 кГц
У цьому випадку IGBT швидко розігрівається практично до максимально допустимих температур.
Якщо ж скинути частоту ШІМ до 2 кГц, ситуація нормалізується відразу — тепловий баланс наступає приблизно при абсолютно безпечних 53 С.
Рис 14. Температура корпусу IGBT при 20 Гц, fшим = 2 кГц
Слід зауважити, що абсолютні значення температур залежать від заданих в модель теплових параметрів системи охолодження,які можуть не збігатися з реальними, тому потрібно звертати увагу не на кількісну картину, а на якісну.
Таким чином, можна вважати доведеним, що ПЧ дельта примусово скидає опорну частоту ШІМ для малих швидкостей обертання, щоб зменшити тепловиділення і температуру всередині ПЧ.
Але чому так важлива температура всередині ПЧ? Адже останнім часом верхня межа робочого діапазону температур багатьох радіокомпонентів істотно зросла?
Тому що температура в будь-якому випадку, це термін служби ПЧ. Справа в тому, що при зниженні температури на кожні 15С, подвоюються показники напрацювання на відмову (MTBF) силових конденсаторів, а на кожні 10С — подвоюється MTBF трансформаторів.
Тому Дельта і розміщує силові конденсатори в спеціальному відсіку, термічно ізольованому від джерел тепла, забезпеченим індивідуальними вентилятором.
Рис 15. Відсік силових конденсаторів з індивідуальним вентилятором ПЧ Дельта (правий верхній кут корпусу)
Ми розглянули режим роботи ПЧ VFD-C2000 з установками частоти ШІМ за замовчуванням. Дельта справедливо вважає, що строк служби ПЧ важливіше, ніж звукові ефекти.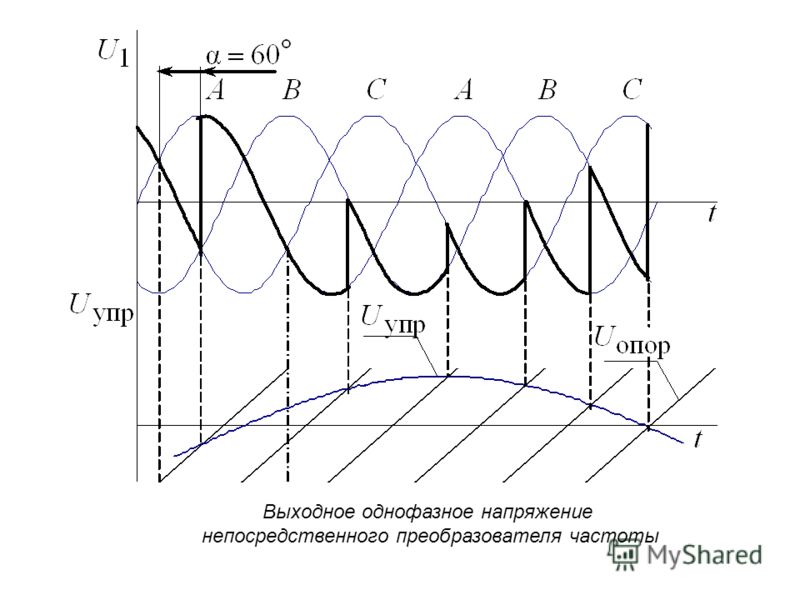
Проте існують й інші режими керування частотою ШІМ, які визначаються параметром 06-55. При бажанні можна взагалі заборонити частотнику змінювати частоту ШІМ, проте в цьому випадку можливе спрацьовування інших захистів ПЧ.
Навіть якщо спрацьовування захистів не станеться, робота в такому режимі суттєво вплине на післягарантійний термін служби перетворювача з-за перегріву..
Таким чином, вибираючи «тихий» режим роботи перетворювача частоти і збільшуючи для цього частоту ШІМ, ви насправді завжди вибирати між комфортом і довговічністю.
Принцип работы частотного преобразователя и критерии его выбора
Краткое описание назначения, принципа работы и критериев выбора частотного преобразователя, как устройства управления асинхронным электродвигателем
Асинхронный двигатель с короткозамкнутым ротором является сегодня самым массовым и надежным устройством для привода различных машин и механизмов. Но у каждой медали есть и обратная сторона.
Два основных недостатка асинхронного двигателя – это невозможность простой регулировки скорости вращения ротора, очень большой пусковой ток — в пять, семь раз превышающий номинальный. Если использовать только механические устройства регулирования, то указанные недостатки приводят к большим энергетическим потерям и к ударным механическим нагрузкам. Это крайне отрицательно сказывается на сроке службы оборудования.
Если использовать только механические устройства регулирования, то указанные недостатки приводят к большим энергетическим потерям и к ударным механическим нагрузкам. Это крайне отрицательно сказывается на сроке службы оборудования.
Частотный преобразователь
В результате исследовательских работ в этом направлении родился новый класс приборов, позволивший решить эти проблемы не механическим, а электронным способом.
Частотный преобразователь с широтно–импульсным управлением (ЧП с ШИМ) снижает пусковые токи в 4-5 раз. Он обеспечивает плавный пуск асинхронного двигателя и осуществляет управление приводом по заданной формуле соотношения напряжение / частота.
Частотный преобразователь дает экономию по потреблению энергии до 50%. Появляется возможность включения обратных связей между смежными приводами, т.е. самонастройки оборудования под поставленную задачу и изменение условий работы всей системы.
Принцип работы частотного преобразователя
Частотный преобразователь с ШИМ представляет собой инвертор с двойным преобразованием напряжения. Сначала сетевое напряжение 220 или 380 В выпрямляется входным диодным мостом, затем сглаживается и фильтруется с помощью конденсаторов.
Сначала сетевое напряжение 220 или 380 В выпрямляется входным диодным мостом, затем сглаживается и фильтруется с помощью конденсаторов.
Это первый этап преобразования. На втором этапе из постоянного напряжения, с помощью микросхем управления и выходных мостовых IGBT ключей, формируется ШИМ последовательность определенной частоты и скважности. На выходе частотного преобразователя выдаются пачки прямоугольных импульсов, но за счет индуктивности обмоток статора асинхронного двигателя, они интегрируются и превращаются наконец в напряжение близкое к синусоиде.
Критерии выбора частотных преобразователей
Выбор по функциям
Каждый производитель пытается обеспечить себе конкурентное превосходство на рынке. Первое правило для обеспечения максимума продаж – это низкая цена. Поэтому производитель стремиться включить в свое изделие только необходимые функции. А остальные предлагает в качестве опций. Прежде чем купить частотный преобразователь, определитесь, какие функции вам нужны. Стоит выбирать тот прибор, который имеет большинство необходимых функций в базовом варианте.
Стоит выбирать тот прибор, который имеет большинство необходимых функций в базовом варианте.
По способу управления
Сразу отбрасывайте те преобразователи, которые не подходят по мощности, типу исполнения, перегрузочной способности и т.д. По типу управления, нужно определиться, что выбрать, скалярное или векторное управление.
Большинство современных частотных преобразователей реализуют векторное управление, но такие частотные преобразователи дороже, чем частотные преобразователи со скалярным управлением.
Векторное управление дает возможность более точного управления, снижая статическую ошибку. Скалярный режим только поддерживает постоянное соотношение между выходным напряжение и выходной частотой, но например, для вентиляторов это вполне достаточно.
По мощности
Если мощности оборудования примерно одинаковы, то выбирайте преобразователи одной фирмы с мощностью по мощности максимальной нагрузки. Так вы обеспечите взаимозаменяемость и упростите обслуживание оборудования. Желательно, чтобы сервис центр выбранного частотного преобразователя был в вашем городе.
Желательно, чтобы сервис центр выбранного частотного преобразователя был в вашем городе.
По сетевому напряжению
Всегда выбирайте преобразователь с максимально широким диапазоном напряжений как вниз, так и вверх. Дело в том, что для отечественных сетей само слово стандарт может вызвать только смех сквозь слезы. Если пониженное напряжение приведет, скорее всего, к отключению частотного преобразователя, то повышенное может вызвать взрыв сетевых электролитических конденсаторов и входу прибора из строя.
По диапазону регулировки частоты
Частотный преобразователь Верхней предел регулировки частоты важен при использовании двигателей с высокими номинальными рабочими частотами, например для шлифовальных машин ( 1000 Гц и более). Убедитесь, что диапазон частот соответствует вашим потребностям. Нижний предел определяет диапазон регулирования скорости привода. Стандарт – это 1:10. Если вам нужен более широкий диапазон, то выбирайте только векторное управление, запросите параметры привода у производителя. Даже заявленный предел от 0 Гц, не гарантирует устойчивую работу привода.
Даже заявленный предел от 0 Гц, не гарантирует устойчивую работу привода.
По количеству входов управления
Дискретные входы нужны для ввода команд управления ( пуск, стоп, реверс, торможение и т.д.). Аналоговые входы необходимы для ввода сигналов обратной связи (регулировки и настройки привода в процессе работы). Цифровые входы нужны для ввода высокочастотных сигналов от цифровых датчиков скорости и положения (энкодеров). Количество входов много не бывает, но чем больше входов, тем сложнее систему можно построить, и тем она дороже.
По количеству выходных сигналов
Дискретные выходы используются для выхода сигналов о различных событиях (авария, перегрев, входное напряжение выше или ниже уровня, сигнал ошибки ит.д.). Аналоговые выходы используются для построения сложных систем с обратными связями. Рекомендации по выбору аналогичны предыдущему пункту.
По шине управления
Оборудование, с помощью которого вы будете управлять частотным преобразователем должно иметь ту же шину и количество входов выходов что и выбранный вами частотный преобразователь. Предусмотрите некоторый запас по входам и выходам для дальнейшей модернизации.
Предусмотрите некоторый запас по входам и выходам для дальнейшей модернизации.
По сроку гарантии
Срок гарантии косвенно позволяет оценить надежность частотного преобразователя. Естественно, нужно выбирать частотный преобразователь с большим сроком. Некоторые производители оговаривают особо случаи поломок, которые не являются гарантийными. Всегда тщательно читайте документацию и посмотрите в интернете отзывы о моделях и производителях оборудования. Это поможет правильному выбору. Не жалейте денег на качественный сервис и обучение персонала.
По перегрузочным способностям
В первом приближении, мощность частотного преобразователя нужно выбирать на 10-15% больше мощности двигателя. Ток преобразователя должен быть больше номинального тока двигателя и чуть больше тока возможных перегрузок.
В описании на конкретный механизм обычно указывают токи перегрузок и длительность их протекания. Читайте документацию! Это вас развлечет, и возможно, обезопасит от поломок оборудования в будущем. Если для привода характерны еще и ударные (пиковые) нагрузки (нагрузки в течении 2-3 сек), то необходимо выбрать преобразователь по пиковому току. Опять возьмите запас 10%.
Если для привода характерны еще и ударные (пиковые) нагрузки (нагрузки в течении 2-3 сек), то необходимо выбрать преобразователь по пиковому току. Опять возьмите запас 10%.
Популярные товары
Шины медные плетеные
Шины изолированные гибкие и твердые
Шинодержатели
Изоляторы
Индикаторы наличия напряжения
Шим трехфазный инвертор
Соединение параллельных каналов каждой фазы осуществляется с помощью N двухобмоточных уравнительных реакторов, обеспечивающих технический результат — улучшение формы кривой выходного напряжения инвертора. В настоящее время в различных электроустановках, в регулируемых электроприводах, во вторичных источниках питания, в электроустановках связи с линиями передач постоянного тока и других электроустановках применяются инверторы напряжения, преобразующие постоянный ток в переменный. Указанные УПП соединяются в схему трехфазного моста. Соответствующее управление обеспечивает работу УПП в ключевом режиме, а регулирование выходного напряжения таких инверторов, как правило, осуществляется методом широтно-импульсной модуляции ШИМ , при котором в интервале одного периода основной частоты УПП многократно включаются и выключаются так, чтобы обеспечивались требуемые параметры основной волны 1-й гармоники выходного напряжения.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Инвертор (Inverter). Широтно-импульсная модуляция (ШИМ)
- Частотный преобразователь (электропривод)
- способ управления трехфазным инвертором напряжения с шим и устройство для его осуществления
- 8.2.4 Трехфазный инвертор напряжения
- Регулятор обязанности PWM солнечный
- В pwm управляющий инвертор 1-фазный вход 3-фазный преобразователь переменной частоты
- 8.
2.2. Трехфазный инвертор напряжения
Инвертор (электротехника) - Способ управления трехфазным инвертором напряжения с шим и устройство для его осуществления
- Инвертор (Inverter). Широтно-импульсная модуляция (ШИМ)
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Трёхфазный инвертор на Arduino DUE. Работа асинхронного двигателя от солнечных батарей.
Инвертор (Inverter). Широтно-импульсная модуляция (ШИМ)
Схема трехфазного инвертора напряжения представлена на рис. В схеме на рис. В сбалансированной трехфазной системе фазные напряжения и токи одинаковы в каждой фазе с учетом междуфазного сдвига и сумма их значений для двух любых фаз определяет значение напряжения и тока в третьей фазе.
В процессе модуляции в схеме имеет место восемь состояний ключей S 1— S 6, указанных в табл. В традиционных методах синусоидальной ШИМ для формирования выходных напряжений используется шесть состояний ключей I—VI. Таблица 8. Состояние ключей и напряжений фаз a и b в схеме трехфазного инвертора напряжения 0 — выключенное, 1 — включенное.
Смена состояний ключей во времени происходит в зависимости от соотношения текущих значений опорного и несущего сигналов. Рассмотрим формирование линейных напряжений на выходе инвертора. В целях единообразия трехфазной и однофазной схем будем рассматривать линейное напряжение u ab как разность напряжений фаз а и б , определенных относительно точки 0.
Выбор общей точки не имеет принципиального значения. Например, в качестве такой точки можно взять точку с потенциалом минусовой шины постоянного тока или какую-нибудь другую. С учетом выбора общей точки 0 линейное напряжение u ab равно разности фазных напряжений u ab и т.
Например, в качестве такой точки можно взять точку с потенциалом минусовой шины постоянного тока или какую-нибудь другую. С учетом выбора общей точки 0 линейное напряжение u ab равно разности фазных напряжений u ab и т.
Напряжения фаз u a 0 и u b 0 могут принимать следующие значения:. Из табл. Это упрощает алгоритм управления инвертором и его схемотехническую реализацию. С учетом значений при модуляции рис. На интервалах отрицательных полуволн u M a , u M b условия изменении состояний справедливы для ключей S 4 фаза а и S 6 фаза b рис.
Равенство нулю потенциалов фаз а и b соответствует проводимости ключей других плеч и обратных диодов подобно тому, как это имело место в однофазных инверторах напряжения. Согласно табл. Диаграммы синусоидальной ШИМ в трехфазном инверторе: а — напряжение модулирующих сигналов; б — напряжение фаз u a 0 ; в — напряжение фаз u b 0 ; г — линейное напряжение u ab. В трехфазных инверторах, как и в однофазных, нагрузку ключей по току можно оценить по средним значениям токов в них на интервале одного периода.
Таким образом,. Файловый архив студентов. Логин: Пароль: Забыли пароль? Email: Логин: Пароль: Принимаю пользовательское соглашение. FAQ Обратная связь Вопросы и предложения. Добавил: Upload Опубликованный материал нарушает ваши авторские права? Сообщите нам.
Силовая Электроника. Скачиваний: Основные виды устройств преобразовательной техники. Основные виды устройств силовой электроники символически изображены на рис. Екатеринбург, Куйбышева , Трехфазный инвертор напряжения Схема трехфазного инвертора напряжения представлена на рис. Трехфазная мостовая схема инвертора напряжения В сбалансированной трехфазной системе фазные напряжения и токи одинаковы в каждой фазе с учетом междуфазного сдвига и сумма их значений для двух любых фаз определяет значение напряжения и тока в третьей фазе.
Диаграммы синусоидальной ШИМ в трехфазном инверторе: а — напряжение модулирующих сигналов; б — напряжение фаз u a 0 ; в — напряжение фаз u b 0 ; г — линейное напряжение u ab В трехфазных инверторах, как и в однофазных, нагрузку ключей по току можно оценить по средним значениям токов в них на интервале одного периода.
Таким образом, через ключ S 1 ток поступает в нагрузку, а при изменении знака возвращается в источник через обратный диод D 1. Соседние файлы в папке СЭ Состояние ключей.
Значения напряжений.
Частотный преобразователь (электропривод)
Воронцов Кирилл Александрович ,. Мыцык Геннадий Сергеевич. Изобретение относится к области силовой преобразовательной техники и может быть использовано при построении трехфазных инверторов напряжения ТИН централизованного типа для питания трехфазной и однофазной нагрузок. Известны ТИН по трехфазной мостовой схеме, нечувствительные к несимметрии трехфазной нагрузки, которые выполнены в виде 4-х стоек полностью управляемых ключей на базе транзисторов, зашунтированных обратными диодами , включенных между шинами питания источника постоянного напряжения см. Моин B. Стабилизированные транзисторные преобразователи — М. Каждая из трех основных стоек ключей содержит два последовательно соединенных ключа, точка соединения которых образует один из трех выходных выводов ТИН.
Частотный преобразователь — электронное устройство для изменения частоты переменного тока частотой 50 (60) Гц в трёхфазный или однофазный ток, частотой от 1 Гц до Гц. ток промышленной частоты в постоянный, и инвертора (преобразователя) (иногда с ШИМ), преобразующего.
способ управления трехфазным инвертором напряжения с шим и устройство для его осуществления
Схема трехфазного инвертора напряжения представлена на рис. В схеме на рис. В сбалансированной трехфазной системе фазные напряжения и токи одинаковы в каждой фазе с учетом междуфазного сдвига и сумма их значений для двух любых фаз определяет значение напряжения и тока в третьей фазе. Это необходимо учитывать при задании опорных сигналов модуляции. Как и в однофазных, в трехфазных схемах можно организовать модуляцию, используя в качестве опорных модулирующих сигналов синусоидальные сигналы и сигналы несущей частоты треугольной формы. В процессе модуляции в схеме имеет место восемь состояний ключей S 1— S 6, указанных в табл. В традиционных методах синусоидальной ШИМ для формирования выходных напряжений используется шесть состояний ключей I—VI. Таблица 8. Состояние ключей и напряжений фаз a и b в схеме трехфазного инвертора напряжения 0 — выключенное, 1 — включенное.
В традиционных методах синусоидальной ШИМ для формирования выходных напряжений используется шесть состояний ключей I—VI. Таблица 8. Состояние ключей и напряжений фаз a и b в схеме трехфазного инвертора напряжения 0 — выключенное, 1 — включенное.
8.2.4 Трехфазный инвертор напряжения
Основы электроники. Для преобразования постоянного тока в переменный применяют специальные электронные силовые устройства, называемые инверторами. Чаще всего инвертор преобразует постоянное напряжение одной величины в переменное напряжение другой величины. Таким образом, инвертор — это генератор периодически изменяющегося напряжения, при этом форма напряжения может быть синусоидальной, приближенной к синусоидальной или импульсной.
Новый клиент? Начинать здесь.
Регулятор обязанности PWM солнечный
Преобразователи частоты предназначены для регулировки частоты вращения и момента на валу асинхронного или синхронного электродвигателя. Преобразователь частоты — это прибор, предназначенный для преобразования переменного напряжения одной частоты обычно частоты питающей сети в переменное напряжение другой частоты. Выходная частота в современных инверторах может быть как ниже, так и выше частоты питающей сети. Изменение частоты питающего напряжения пропорционально меняет скорость вращения двигателя. Снижение частоты статора ниже номинального при неизменном напряжении приводит к снижению индуктивного сопротивления статора и цепи намагничивания.
Выходная частота в современных инверторах может быть как ниже, так и выше частоты питающей сети. Изменение частоты питающего напряжения пропорционально меняет скорость вращения двигателя. Снижение частоты статора ниже номинального при неизменном напряжении приводит к снижению индуктивного сопротивления статора и цепи намагничивания.
В pwm управляющий инвертор 1-фазный вход 3-фазный преобразователь переменной частоты
Guangzhou Sanjing Electric Co. LTD далее — SAJ является профессиональным ведущим поставщиком технологий привода и управления двигателями, решений по преобразованию возобновляемой энергии её передаче и хранению. SAJ предлагает профессиональные сетевые солнечные инверторы, гибридные солнечные инверторы и решения для мониторинга энергии, преобразователь частоты, интеллектуальный привод насоса и систему солнечной энергии. Суммарная поставка входит в пятерку лидеров на мировом рынке. Между тем, солнечные инверторы SAJ в течение пяти лет подряд были удостоены звания 10 лучших производителей солнечных инверторов в Китае.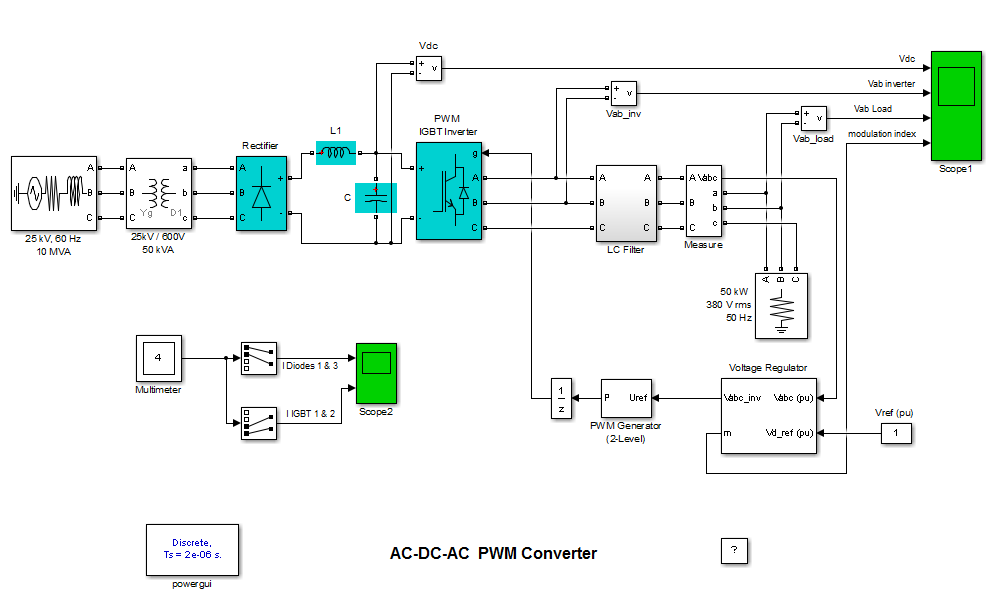 Среднемесячная выработка бытового солнечного инвертора 1 кВт кВт от SAJ входит в тройку лидеров в отрасли солнечной энергетики на внутреннем рынке.
Среднемесячная выработка бытового солнечного инвертора 1 кВт кВт от SAJ входит в тройку лидеров в отрасли солнечной энергетики на внутреннем рынке.
В способе управления трехфазным инвертором напряжения по мостовой с широтно-импульсной модуляцией управления ключами.
8.2.2. Трехфазный инвертор напряжения
Патентообладатель и : Петербургское акционерное общество «Вагонмаш» Приоритеты: подача заявки: Использование: изобретение относится к области электротехники. Сущность изобретения: изобретение позволяет снизить потери в преобразователе и снизить влияние ограничения по минимальному реализуемому фазному току, а, следовательно, и по минимальному моменту путем снижения частоты переключения вентилей. Это достигается тем, что на входы 30 и 31 контроллера 8 скорости подаются сигналы, пропорциональные соответственно заданному моменту на валу асинхронного двигателя 3 и скорости вращения его ротора.
Инвертор (электротехника)
ВИДЕО ПО ТЕМЕ: Самодельный частотный преобразователь 220-380V собственной сборки
Использование: изобретение относится к области электротехники. Сущность изобретения: изобретение позволяет снизить потери в преобразователе и снизить влияние ограничения по минимальному реализуемому фазному току, а, следовательно, и по минимальному моменту путем снижения частоты переключения вентилей. Это достигается тем, что на входы 30 и 31 контроллера 8 скорости подаются сигналы, пропорциональные соответственно заданному моменту на валу асинхронного двигателя 3 и скорости вращения его ротора. На выходах 32 и 33 контроллера 8 формируются синусоидальные последовательности, пропорциональные заданным значениям фазных токов двигателя 3, а на выходах 46, 47 и 48 контроллера 8 с той же частотой формируются импульсные фазные сигналы а, b, c.
Частотный асинхронный преобразователь частоты служит для преобразования сетевого трёхфазного или однофазного переменного тока частотой 50 60 Гц в трёхфазный или однофазный ток, частотой от 1 Гц до Гц.
Способ управления трехфазным инвертором напряжения с шим и устройство для его осуществления
Ощущение, что его 3 пьяных индуса за вечер написали. Да и скорость разработки он не увеличивает, если что-то ломается, то можно пару дней искать косяк в библиотеках. У меня много знакомых, кто с регистров ушли на HAL, а через пол года вернулись. Кстати да, интегрирование — отличная интерпретация. В следующий раз в таком виде и буду описывать. Спасибо за хорошую мысль! И мне кажется что дискретность ШИМа избыточна, и достаточно, и частоту можно будет поднять.
Инвертор (Inverter). Широтно-импульсная модуляция (ШИМ)
Трехфазные АИН выполняют по мостовой схеме рис. Диоды включены встречно-параллельно тиристорам и выполняют ту же функцию, что и аналогичные диоды в однофазной схеме. Нагрузка активно- индуктивного характера включается в звезду или треугольник. В качестве вентилей могут служить одно- и двухоперационные тиристоры или транзисторы коммутационные узлы, необходимые при использовании однооперационных тиристоров, на 8.
Что такое и для чего нужен преобразователь частоты
Более 50% электроэнергии в промышленном секторе используется для привода электродвигателей через частотные преобразователи. В перспективе оснастить каждый промышленный электродвигатель частотным преобразователем. Эти приборы позволяют экономить 20-70% электроэнергии. Принцип этой экономии очень простой: электродвигатель работают не под постоянной нагрузкой. В случае если нагрузка ослабевает, потребление тока не уменьшается. Таким образом, двигатель работает большую часть своего времени наполовину вхолостую, потребляя лишнюю энергию. Простой пример – мотор-редуктор крана, который имеет постоянную скорость вращения и мощность вне зависимости от того, какого веса груз с его помощью поднимают. Частотный преобразователь полностью решает эти проблемы. Такие излишки энергии суммируются, и за рабочую смену накапливается серьезная экономия.
На электродвигателях со строго постоянной нагрузкой применение частотных преобразователей бессмысленно. В промышленности это лишь небольшая часть электроустановок: насосы, вентиляторы, компрессоры. Для компрессоров с циклическим расходом воздуха частотный преобразователь уже выгоден и может дать значительную экономию энергии. Во всех остальных случаях ЧП очень выгоден. Примеры: упаковочное, сортировочное, обрабатывающее оборудование, металлорежущие станки.
В промышленности это лишь небольшая часть электроустановок: насосы, вентиляторы, компрессоры. Для компрессоров с циклическим расходом воздуха частотный преобразователь уже выгоден и может дать значительную экономию энергии. Во всех остальных случаях ЧП очень выгоден. Примеры: упаковочное, сортировочное, обрабатывающее оборудование, металлорежущие станки.
Виды преобразователей частоты
Под преобразователем частоты понимается прибор, обеспечивающий изменение частоты переменного тока на выходе. При этом, на входе он может питаться как от постоянного, так и от переменного тока. Вариант подбирается под конкретную контактную сеть предприятия. Питание может быть батарейным, низковольтным, высоковольтным (например, однофазный ток 400 вольт). На выходе частотного преобразователя 3 или 1 фаза. Есть варианты и на большее число фаз. Наиболее применяема трехфазная схема, так как она при простом техническом устройстве дает отличный КПД. Каждая фаза подается со сдвигом на 120 градусов, что за все три фазы электродвигатель сделает полный оборот.
Известно большое множество конструкции частотного преобразователя, как практически применяемых, производимых серийно, так и чисто экспериментальных. Все их можно разделить только на две группы: механические и электронные. Также есть совмещенные варианты. Механические частотные преобразователи, это ничто не иное, как электродвигатель, объединенный с генератором, вырабатывающим ток нужной частоты. КПД такой схемы весьма низок, поэтому она имеет очень узкое практическое применение, например, в военной радиоаппаратуре, где для обеспечения радиационной устойчивости полупроводники использовать нельзя.
Электронные частотные преобразователи
Структурно, схема электронного частотного преобразователя включает в себя генератор переменной частоты и мощный усилитель низких частот на транзисторах. Входное напряжение сначала выпрямляется, затем подается на выходные каскады усилителя. Частота задается микроконтроллером, генератором синусоидального сигнала. Частотный преобразователь содержит схему инвертора «чистая синусоида», причем троекратно повторенную, отдельный усилитель для каждой фазы. Микроконтроллер генерирует одновременно три синусоидальных сигнала со сдвигом по фазе 120 градусов. Изменение частоты обеспечивается без изменения фаз, иначе вращение электродвигателя будет нарушенным, а КПД системы упадет.
Микроконтроллер генерирует одновременно три синусоидальных сигнала со сдвигом по фазе 120 градусов. Изменение частоты обеспечивается без изменения фаз, иначе вращение электродвигателя будет нарушенным, а КПД системы упадет.
Общая схема частотного преобразователя получается сложной, с чем и связана их высокая изначальная стоимость. Тем не менее, они все равно достаточно быстро окупаются, за счет значительной экономию энергии. По варианту питания возможны как низковольтные, так и высоковольтные варианты исполнения. Преимущества высоковольтного питания:
- Меньше потери в выпрямителях, минимальное падение напряжения на диодах 0,5-1 вольт некритично для высокого напряжения.
- Меньше сечение проводов, дорожек на печатной плате, меньше токи в электронной схеме.
- Конструкция дешевле и компактнее.
- Схема нечувствительна к помехам.
Недостатки высоковольтного питания
- Меньшая надежность высоковольтных выходных транзисторов.
- Высоковольтные конденсаторы имеют большие габариты, а при пробое взрываются.

- Требуется защита дорожек печатной платы и паек специальным компаундом.
Основное большинство частотных преобразователей рассчитано на общепромышленные электродвигатели широкого применения на 380-400 вольт. Это обеспечивает их совместимость с имеющимся на предприятиях оборудованием. Модернизация проводится без замены двигателей и редукторов.
Тиристорные частотные преобразователи
Выходные каскады ЧП могут быть реализованы на биполярных транзисторах, IGBT и MOP-транзисторах, или же на тиристорах. Причем, тиристорная схема появилась раньше всего по причине технологической простоты их производства. Она имеет множество плюсов, главных из которых – низкая стоимость частотного преобразователя и низкая стоимость его ремонта при возможной замене высоковольтных тиристоров. Тиристорная схема подходит для встречно-параллельных, перекрестных и мостовых схем включения обмоток двигателя.
Несмотря на ценовое преимущество, ЧП тиристорной схемы имеет множество недостатков, ограничивающих его применение
- Неправильная форма напряжения на выходе.
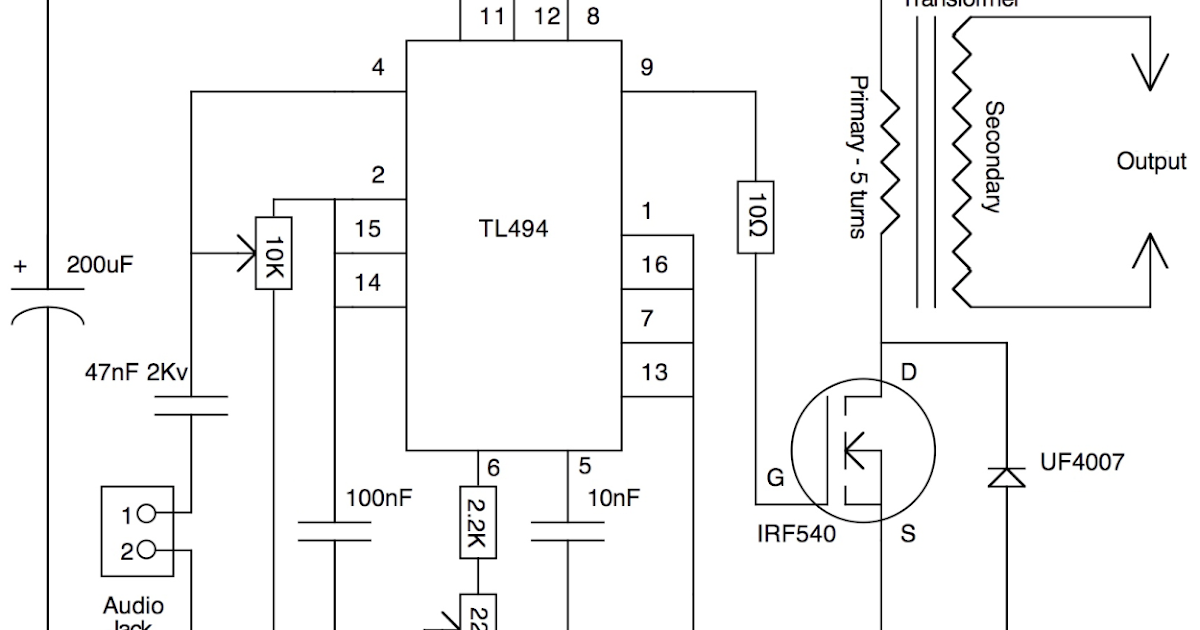 Тиристорная схема далека преобразователя «чистая синусоида». На выходе присутствуют гармоники, напряжения другой частоты, снижающие общую эффективность привода.
Тиристорная схема далека преобразователя «чистая синусоида». На выходе присутствуют гармоники, напряжения другой частоты, снижающие общую эффективность привода. - Генерация радиопомех. Тиристор создает гармоники в питающем напряжении. При плохо экранированной линии питания это вызывает мощные радиопомехи. Они мешают не только радиопередач в эфире, но и конкретным устройствам на предприятии, например, компьютерам
- Тиристорный ЧП невозможно использовать для регулировки скорости вращения электродвигателя в сторону увеличения частоты напряжения питающей сети. С его помощью можно только снижать, а не увеличивать, мощность.
Лучший вариант применения тиристорного ЧП — регулировка частоты вращения для мощных промышленных электродвигателей. Если привод подобран с запасом мощности, то такой недостаток, как отсутствие возможности форсировки, несущественен. Особе внимание уделяется экранирования линий питания для предупреждения распространения электромагнитных помех.
Широтно-импульсная модуляция в частотных преобразователях
Функция Широтно-Импульсной Модуляции (ШИМ) позволяет экономить электроэнергию. При питании от сети переменного трехфазного тока или от ЧП с таким же трехфазным током на выходе любой необходимой частоты, возможно применять ШИМ. Суть этой передовой технологии состоит в создании импульсов тока, периодического включения и выключения без нарушения синусоидальной формы. Частота ШИМ в несколько раз и несколько десятков раз превышает частоту питания. Чем выше частота — тем меньше искажения синусоидального напряжения, но больше потери и радиопомехи.
При питании от сети переменного трехфазного тока или от ЧП с таким же трехфазным током на выходе любой необходимой частоты, возможно применять ШИМ. Суть этой передовой технологии состоит в создании импульсов тока, периодического включения и выключения без нарушения синусоидальной формы. Частота ШИМ в несколько раз и несколько десятков раз превышает частоту питания. Чем выше частота — тем меньше искажения синусоидального напряжения, но больше потери и радиопомехи.
Введение функции широтно-импульсной модуляции требует некоторых особенностей конструкции частотного преобразователя. Более 70% стоимости ЧП приходится на мощные выходные каскады. Важнейшей задачей является уменьшение сопротивления выходных транзисторов в открытом состоянии. Например, сопротивление перехода всего в 5 Ом при токе 10 А приведет к потерям 50 Вт мощности, которая уйдет на нагрев. Для мощного полупроводникового прибора 50-70 Вт рассеиваемой тепловой мощности являются пределом. Сейчас разработаны и внедрены в широкую практику транзисторы с сопротивлением перехода менее одного Ома. Именно они используются в частотных преобразователях. В контроллере функция ШИМ добавляется легко и не требует значительного удорожания компонентов ЧП. Схема с ШИМ особенно эффективна при использовании в приводах с динамично изменяющейся нагрузкой.
Именно они используются в частотных преобразователях. В контроллере функция ШИМ добавляется легко и не требует значительного удорожания компонентов ЧП. Схема с ШИМ особенно эффективна при использовании в приводах с динамично изменяющейся нагрузкой.
Регулировать мощность электродвигателя можно и куда более простыми методами, чем широтно-импульсная модуляция, однако у нее есть весомые преимущества. Например, регулировать мощность снижением напряжения намного сложнее. Устройство, позволяющее плавно снижать напряжение без потерь очень сложно реализовать. Это будет автотрансформаторная схема, и стоимость такого регулятора превысит цену электродвигателя. Контроллеры ШИМ используются и в других сферах: освещение, импульсные блоки питания.
Преобразователи с промежуточным звеном постоянного тока
Так называют электронные частотные преобразователи, в которых питающее напряжение сначала выпрямляется, а затем опять преобразуется в переменное любой необходимой частоты. Также такую схему называют преобразователями с двойным преобразованием частоты или просто «электронный частотный преобразователь». Частотники по такой схеме подходят для любых диапазонов скоростей и мощностей. Они отличаются множеством функций, которые объединены в одном устройстве. Выходная частота может быть как ниже, так и выше питающего тока. Это значения не имеет, так как в ЧП питающее напряжение все равно выпрямляется. На выходе генерируется чистая синусоидальная форма напряжения, без характерных искажений, свойственных для преобразователей тиристорной схемы.
Частотники по такой схеме подходят для любых диапазонов скоростей и мощностей. Они отличаются множеством функций, которые объединены в одном устройстве. Выходная частота может быть как ниже, так и выше питающего тока. Это значения не имеет, так как в ЧП питающее напряжение все равно выпрямляется. На выходе генерируется чистая синусоидальная форма напряжения, без характерных искажений, свойственных для преобразователей тиристорной схемы.
Схемотехнические решения для электронных частотных преобразователей
В электронных частотных преобразователях (кроме тиристорной схемы) используется три одинаковых модуля — усилитель низких частот большой мощности, отдельный на каждую фазу. В отличие от концертного усилителя и бытовой аудиоаппаратуры выход сделан высоковольтным. Функция этих модулей (составляющих 70-80% от стоимости всего частотного преобразователя) — усиление синусоидального сигнала нужной частоты от маломощного генератора. Регулировка фаз (сдвиг каждой на 120 градусов) обеспечивается микроконтроллерным управлением.
КПД частотного преобразователя зависит от сопротивления перехода транзисторов в открытом состоянии. Наиболее совершенны в этом отношении, сравнительно недавно разработанные, IGBT-транзисторы. Биполярные высоковольтные транзисторы используются в малом классе мощности, полевые высоковольтные – в малом и среднем, IGBT-транзисторы и их сборки пригодны для любых классов мощности, в том числе и для самых мощных ЧП с трехфазным напряжением на выходе 400 вольт.
Способы управления частотными преобразователями
Главная цель установки частотного преобразователя – экономия энергии. Процент экономии зависит не только от КПД электронных компонентов, но и от выбранной схемы управления. Лучше всего этой задаче отвечает схема автоматического управления, когда режим питания подбирается микроконтроллером в зависимости от нагрузки электродвигателя. Чтобы автоматика могла оценить нагрузку, используются датчики, например, динамометрическая муфта.
Частое название для схемы автоматического управления — управление с обратной связью. Действительно, отслеживание нагрузки осуществляется непрерывно с помощью цепи обратной связи. Помимо датчика нагрузки используется датчик положения вала, датчики положения приводимых элементов и любые другие устройства, которые согласуются с помощью универсальных интерфейсов. Цифровые датчики легко согласуются с современными ЧП и не требуют экранирования линии питания.
Действительно, отслеживание нагрузки осуществляется непрерывно с помощью цепи обратной связи. Помимо датчика нагрузки используется датчик положения вала, датчики положения приводимых элементов и любые другие устройства, которые согласуются с помощью универсальных интерфейсов. Цифровые датчики легко согласуются с современными ЧП и не требуют экранирования линии питания.
Автоматическое управление частотным преобразователем осуществляется по предварительно написанной программе. Причем, программа может прошиваться в память, как самого микроконтроллера ЧП, так и внешних устройств, чаще сего ПЛК (Промышленные Логические Контроллеры). Программы не нужно каждый раз писать заново, давно используются типовые схемы, специально разработанные для экономии электроэнергии в промышленном приводе. Это снижает сроки и стоимость настройки привода после модернизации. Низкая стоимость вычислительных мощностей, большой объем память микроконтроллеров позволяют встроить в частотный преобразователь множество функций.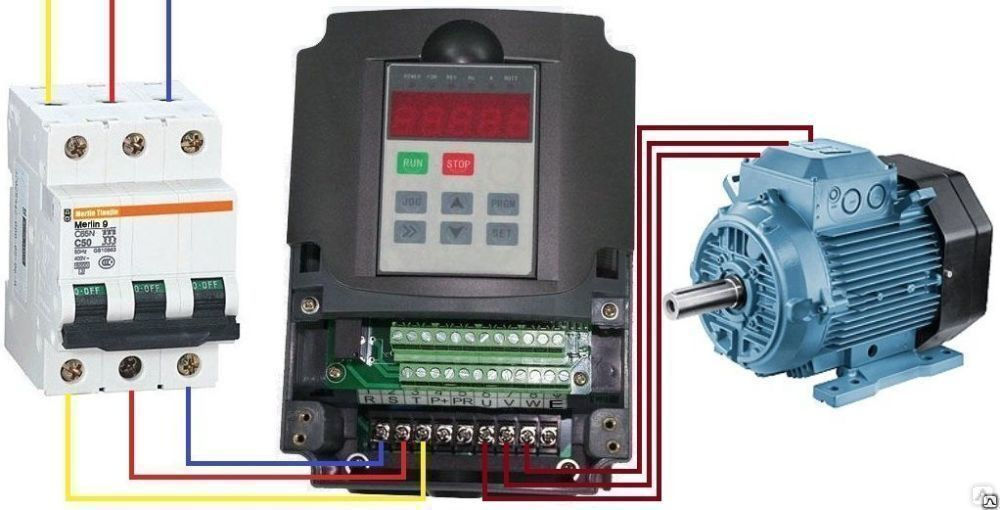
- Автоматическая оценка мощности и подбор оптимального количества энергии для двигателя путем включения ШИМ.
- Автоматическая оценка оптимального числа оборотов для конкретного приводимого механизма и настройка двигателя на эти параметры.
- Автоматическое обучение без участия человека.
- Защита электродвигателя от перегрузок, перенапряжения.
- Защита собственных входных цепей от перегрузки, перегрева, перенапряжения.
- Работа по нескольким программам, подстройка под интенсивность производственных процессов.
- Работа с двумя и более двигателями одновременно.
- Работа с двумя и более двигателями раздельно. Для каждого мотора создается свой «пользовательский профиль», который включается автоматически при переключении на соответствующий двигатель.
- Отключение при аварийных режимах работы оборудования (требует установки соответствующих датчиков)
Экономический эффект от применения частотного преобразователя очень высок. Их выпускается все большее число. Стоимость становится все более доступной. Сейчас она не отличается от цены других силовых полупроводниковых устройств.
Их выпускается все большее число. Стоимость становится все более доступной. Сейчас она не отличается от цены других силовых полупроводниковых устройств.
Omron G7 Преобразователь частоты
Шапка на главной
-
Опыт
Работаем с 2019 года
Опыт поставок различного оборудования для автоматизации
-
Склад
В наличии все необходимое
Складской запас, удовлетворяющий большую часть потребностей
-
Техподдержка
Опытные специалисты-практики
Консультации по настройке и программированию оборудования
-
Сервис
От разработки до внедрения
Создание АСУ, восстановление оборудования, обслуживание
для двигателей мощностью от 0,4 до 300 кВт
Первый в мире инвертор, выполненный по трехуровневой схеме
Частотный преобразователь Omron G7 — первый в мире инвертор на напряжение 400 В, выполненный по трехуровневой схеме. Такое схемное решение сводит к минимуму или полностью устраняет проблемы, связанные с коммутацией IGBT-транзисторов (кабели очень большой длины, подшипниковые токи утечки и синфазные токи) и защищает систему «двигатель-привод» в целом.
Такое схемное решение сводит к минимуму или полностью устраняет проблемы, связанные с коммутацией IGBT-транзисторов (кабели очень большой длины, подшипниковые токи утечки и синфазные токи) и защищает систему «двигатель-привод» в целом.
- 3-уровневое управление уменьшает скачки напряжения на обмотках двигателя до 50%. Нет необходимости в использовании стабилизатора переменного тока на длинных кабелях двигателя
- Управление вектором потока. Прекрасная производительность в режиме разомкнутого контура с крутящим моментом 150% при 0,3 Гц
- Бесшумная работа. Режим бесшумной работы без снижения тока (за счет повышения несущей частоты)
- Широкий выбор дополнительных карт связи: промышленные сети, плата ПЛК, Mechatrolink, аналоговые и цифровые входы-выходы и т.д.
- Программное обеспечение CX-Drive для конфигурирования параметров
ПЧ Omron G7
| CIMR-G7C40111A | Инвертор, 3-ур. ШИМ, 11 кВт, 27A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление ШИМ, 11 кВт, 27A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C40111B | Инвертор, 3-ур. ШИМ, 11 кВт, 27A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C40151A | Инвертор, 3-ур. ШИМ, 15 кВт, 34A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C40151B | Инвертор, 3-ур. ШИМ, 15 кВт, 34A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C40180A | Инвертор, 3-ур. ШИМ, 18.5 кВт, 42A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C40180B | Инвертор, 3-ур. ШИМ, 18.5 кВт, 42A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C40220B | Инвертор, 3-ур. ШИМ, 22 кВт, 52A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление ШИМ, 22 кВт, 52A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C40300B | Инвертор, 3-ур. ШИМ, 30 кВт, 65A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C40370B | Инвертор, 3-ур. ШИМ, 37 кВт, 80A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C40450B | Инвертор, 3-ур. ШИМ, 45 кВт, 97A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C40550B | Инвертор, 3-ур. ШИМ, 55 кВт, 128A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C40750B | Инвертор, 3-ур. ШИМ, 75 кВт, 165A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C40900A | Инвертор, 3-ур. ШИМ, 90 кВт, 195A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление ШИМ, 90 кВт, 195A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C40900B | Инвертор, 3-ур. ШИМ, 90 кВт, 195A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C40P41B | Инвертор, 3-ур. ШИМ, 0.4 кВт, 1.8A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C40P71B | Инвертор, 3-ур. ШИМ, 0.7 кВт, 3.4A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C41100B | Инвертор, 3-ур. ШИМ, 110 кВт, 240A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C41320A | Инвертор, 3-ур. ШИМ, 132 кВт, 270А, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C41320B | Инвертор, 3-ур. ШИМ, 132 кВт, 270А, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление ШИМ, 132 кВт, 270А, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C41600B | Инвертор, 3-ур. ШИМ, 160 кВт, 325A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C41850B | Инвертор, 3-ур. ШИМ, 185 кВт, 370A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C41P51B | Инвертор, 3-ур. ШИМ, 1.5 кВт, 4.8A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C42200B | Инвертор, 3-ур. ШИМ, 220 кВт, 450A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C42P21B | Инвертор, 3-ур. ШИМ, 2.2 кВт, 6.2A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C43000B | Инвертор, 3-ур. ШИМ, 300 кВт, 605А, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление ШИМ, 300 кВт, 605А, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C43P71A | Инвертор, 3-ур. ШИМ, 3.7 кВт, 9.0A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C43P71B | Инвертор, 3-ур. ШИМ, 3.7 кВт, 9.0A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C44P01B | Инвертор, 3-ур. ШИМ, 4.0 кВт, 10A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C45P51B | Инвертор, 3-ур. ШИМ, 5.5 кВт, 15A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7C47P51B | Инвертор, 3-ур. ШИМ, 7.5 кВт, 21A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
| CIMR-G7U25P51A | Инвертор, 3-ур. ШИМ, 5.5 кВт, 27A, 200В, 3-фазы, V/f-,разомкн. или замкн.- векторное управление ШИМ, 5.5 кВт, 27A, 200В, 3-фазы, V/f-,разомкн. или замкн.- векторное управление |
| CIMR-G7U42200B | Инвертор, 3-ур. ШИМ, 220 кВт, 450A, 400В, 3-фазы, V/f-,разомкн.- или замкн.- векторное управление |
PWM Преобразователь частоты
PWM (широтно-импульсная модуляция) Двигатели переменного тока, управляемые преобразователем частоты, используются в большом количестве в широком диапазоне промышленных применений. Преимущества огромны, такие как улучшенное управление процессом, экономия энергии и небольшие пусковые токи и пульсации крутящего момента в течение периода запуска, что увеличивает срок службы водяных насосов и приложений с двигателями, повышает надежность и производительность. Двигатели переменного тока с ШИМ-управлением преобразователем частоты обычно более надежны, чем те, которые питаются напрямую от сети. Например, проблема поломки стержней ротора, в основном из-за чрезмерного пускового момента, практически устраняется за счет плавного пуска с преобразователем частоты.
Асинхронный двигатель, работающий со скоростью выше номинальной, должен быть подтвержден производителем. Преобразователь частоты ШИМ может выдавать частоты до 400 Гц. Однако механическая конструкция асинхронного двигателя с точки зрения подшипников и балансировки ограничивает максимальную частоту, на которой он может работать в хорошем состоянии. Питание асинхронного двигателя от ШИМ-преобразователя частоты также имеет некоторые недостатки (повышенный нагрев, высокие пиковые напряжения и повышенный шум при работе). В большинстве промышленных приложений в диапазоне мощности от менее 1 киловатта до нескольких сотен киловатт используются преобразователи типа инвертора источника напряжения (VSI).
Типовой инверторный преобразователь частоты с источником напряжения состоит из трех силовых секций: преобразователя переменного тока в постоянный (выпрямитель), звена постоянного тока и инвертора постоянного тока в переменный.
-
Выпрямитель берет трехфазный источник питания с фиксированным напряжением и фиксированной частотой от линий электропередач переменного тока и преобразует его в напряжение постоянного тока.
 Очевидно, что он использует шесть силовых диодов в конфигурации трехфазного двухполупериодного моста.
Очевидно, что он использует шесть силовых диодов в конфигурации трехфазного двухполупериодного моста.
- Звено постоянного тока принимает напряжение постоянного тока от выпрямителя и фильтрует его, чтобы обеспечить более плавное фиксированное напряжение постоянного тока для инвертора. Это обычно называют напряжением шины постоянного тока. Он использует фильтрующие конденсаторы в показанной конфигурации.
- Инвертор DC/AC принимает отфильтрованное напряжение постоянного тока и создает трехфазное переменное напряжение и мощность частоты для асинхронного двигателя. Он использует шесть переключателей питания в конфигурации трехфазного моста. Управление рабочим циклом включения/выключения каждого переключателя, а также последовательность и синхронизация переключателей создают переменную частоту, напряжение и чередование фаз.
Частота переключения для создания напряжения ШИМ, обычно называемая «несущей частотой», может иметь фиксированное значение или, в более новых технологиях, переменное значение. Эта характеристика несущей частоты будет определять слышимый шум двигателя, а также то, насколько близко ШИМ-преобразователь частоты к замкнутой чистой синусоидальной мощности. Как правило, чем выше несущая частота, тем ближе форма выходного сигнала к чистой синусоиде.
Эта характеристика несущей частоты будет определять слышимый шум двигателя, а также то, насколько близко ШИМ-преобразователь частоты к замкнутой чистой синусоидальной мощности. Как правило, чем выше несущая частота, тем ближе форма выходного сигнала к чистой синусоиде.
Управление преобразователями частоты может осуществляться как управление с разомкнутым или замкнутым контуром. Для преобразователей частоты с более высокими характеристиками последние могут применять управление, ориентированное на поле.
Полупроводниковые технологии
В современных ШИМ-преобразователях частоты используется несколько типов полупроводниковых устройств. Это:
- Тиристоры плюс внешняя коммутационная сеть
- Биполярные переходные транзисторы (BJT)
- МОП-транзисторы с полевым эффектом (MOSFET)
- Биполярные транзисторы с изолированным затвором (IGBT)
- Запирающие тиристоры (GTO)
- МОП-управляемые тиристоры (MCT)
В зависимости от мощности, тока, частоты и напряжения необходимо выбрать подходящий тип.
Транзистор IGBT представляет собой комбинацию BJT и MOSFET. Он имеет желаемые характеристики MOSFET на входе и лучшие характеристики BJT на выходе. IGBT хорошо подходят для преобразователей частоты VSI. Основными преимуществами являются диапазон мощностей, хорошая проводимость, высокая частота переключения и простота управления.
Некоторые типичные параметры наиболее часто используемых силовых коммутационных устройств предлагает таблица ниже
|
Тип |
Напряжение (UCE) |
Текущий |
Мощность |
Частота переключения |
|
Тиристор |
4 кВ |
3 кА |
1-100 МВт |
500 Гц |
|
ГТО |
3,5 кВ |
2,5 кА |
1-10 МВт |
500 Гц |
|
БДЖТ |
1,2 кВ |
600 А |
1-500 кВт |
2 кГц |
|
МОП-транзистор |
500 В |
30 А |
0,1 кВт |
1 МГц |
|
БТИЗ |
1,4 кВ |
300 А |
1-100 кВт |
10 кГц |
Конструкция преобразователя частоты
Три основных типа преобразователей имеют как определенные преимущества, так и недостатки в зависимости от области применения двигателя. Также обсуждается новый преобразователь частоты с вектором потока.
Также обсуждается новый преобразователь частоты с вектором потока.
Хотя все инверторы регулируют скорость асинхронного двигателя переменного тока, изменяя подаваемое на двигатель напряжение и частоту питания, все они используют для этого разные конструкции. В настоящее время широко используются три основных конструкции преобразователя частоты: широтно-импульсная модуляция (ШИМ), инвертор с источником тока (CSI) и инвертор с источником напряжения (VSI). В последнее время также стал популярен преобразователь частоты с вектором потока.
Давайте сравним эти технологии.
Конструкция ШИМ
Инвертор ШИМ стал наиболее часто используемым контроллером инвертора, поскольку он хорошо работает с двигателями мощностью от 1/2 л.с. до 500 л.с. Важной причиной его популярности является то, что он очень надежен, доступен по цене и отражает наименьшее количество гармоник обратно в источник питания. Большинство устройств рассчитаны на 230 В или 460 В, 3 фазы и обеспечивают выходную частоту от 2 до 400 Гц. Около 100 производителей продают ШИМ-контроллер.
Около 100 производителей продают ШИМ-контроллер.
В секцию ввода подается напряжение сети переменного тока. Отсюда напряжение переменного тока поступает в секцию преобразователя, в которой используется диодный мостовой преобразователь и большие конденсаторы постоянного тока для создания и поддержания стабильного фиксированного напряжения на шине постоянного тока. Напряжение постоянного тока проходит в секцию инвертора, обычно оснащенную биполярными транзисторами с изолированным затвором (IGBT), которые регулируют как напряжение, так и частоту двигателя, создавая выходной сигнал, близкий к синусоидальному.
Термин «широтно-импульсная модуляция» объясняет, почему каждое изменение выходного переменного напряжения представляет собой серию коротких импульсов различной ширины. Изменяя ширину импульсов в каждом полупериоде, средняя производимая мощность имеет синусоидальный выходной сигнал. Количество переходов от положительного к отрицательному в секунду определяет фактическую частоту двигателя.
Скорость переключения IGBT в преобразователе частоты с ШИМ может находиться в диапазоне от 2 кГц до 15 кГц. В современных новых конструкциях ШИМ используются силовые IGBT, которые работают на этих более высоких частотах. Благодаря большему количеству импульсов в каждом полупериоде шум двигателя, связанный с приложениями с преобразователем частоты, уменьшается, поскольку обмотки двигателя теперь колеблются с частотой, находящейся за пределами спектра человеческого слуха. Кроме того, форма волны тока, подаваемого на двигатель, сглаживается по мере удаления пиков тока. На рис. 2 (на стр. 56) показаны выходные сигналы напряжения и тока преобразователя частоты с ШИМ.
ШИМ имеют следующие преимущества.
- Превосходный коэффициент входной мощности благодаря фиксированному напряжению на шине постоянного тока.
- В шестиступенчатых инверторах обычно не наблюдается заедания двигателя.
- Высочайшая эффективность: от 92% до 96%.
-
Совместимость с многомоторными приложениями.
- Способность преодолевать потери мощности от 3 до 5 Гц.
- Более низкая начальная стоимость.
Ниже перечислены недостатки, которые вы также должны учитывать.
- Нагрев двигателя и пробой изоляции в некоторых приложениях из-за высокочастотного переключения транзисторов.
- Нерегенеративная операция.
- Гармоники мощности со стороны сети (в зависимости от применения и типоразмера преобразователя частоты).
Исполнение CSI
Входящий источник питания в исполнении CSI преобразуется в напряжение постоянного тока в секции преобразователя SCR, который регулирует поступающую мощность и создает переменное напряжение на шине постоянного тока. Это напряжение регулируется срабатыванием тиристоров по мере необходимости для поддержания надлежащего соотношения вольт/герц. SCR также используются в инверторной секции для обеспечения выходной мощности двигателя с переменной частотой. Преобразователи частоты CSI по своей природе регулируют ток и требуют для работы большого внутреннего индуктора, а также нагрузки двигателя.
Преобразователи частоты CSI по своей природе регулируют ток и требуют для работы большого внутреннего индуктора, а также нагрузки двигателя.
CSI имеют следующие преимущества.
- Надежность благодаря встроенной функции ограничения тока.
- Возможность рекуперации энергии.
- Простая схема.
Однако ниже приведены недостатки использования технологии CSI.
- Генерация гармоник большой мощности обратно в источник питания.
- Зубчатая передача ниже 6 Гц из-за выходного сигнала прямоугольной формы.
- Использование большого и дорогого индуктора.
- Шипы ВН к обмоткам двигателя.
- Зависит от нагрузки; плохой для многомоторных приложений.
- Низкий коэффициент входной мощности из-за секции преобразователя SCR.
Конструкция VSI
Преобразователь частоты VSI очень похож на преобразователь частоты CSI тем, что в нем также используется секция преобразователя SCR для регулирования напряжения на шине постоянного тока. Его инверторная секция обеспечивает шестиступенчатый выходной сигнал, но не является регулятором тока, как преобразователь частоты CSI. Этот преобразователь частоты считается регулятором напряжения и использует транзисторы, тринисторы или тиристоры с запирающим затвором (GTO) для создания регулируемой выходной частоты для двигателя.
Его инверторная секция обеспечивает шестиступенчатый выходной сигнал, но не является регулятором тока, как преобразователь частоты CSI. Этот преобразователь частоты считается регулятором напряжения и использует транзисторы, тринисторы или тиристоры с запирающим затвором (GTO) для создания регулируемой выходной частоты для двигателя.
VSI имеют следующие преимущества.
ТЕРМИНЫ, КОТОРЫЕ НУЖНО ЗНАТЬ
Зазубренность: Симптом пульсации двигателя при работе на очень низкой частоте, обычно от 2 до 6 Гц. Вал двигателя вращательно дергается. Термин «зубчатая передача» происходит от зубчатых колес.
Нерегенеративный: Неспособность преобразователя частоты регенерировать или реверсировать поток энергии от двигателя через преобразователь частоты.
- Базовая простота в дизайне.
- Применяется для многомоторных операций.
- Работа не зависит от нагрузки.
Как и у других типов преобразователей частоты, у них есть недостатки.
- Генерация гармоник большой мощности обратно в источник питания.
- Низкий коэффициент входной мощности из-за секции преобразователя SCR.
- Зубчатая передача ниже 6 Гц из-за выходного сигнала прямоугольной формы.
- Нерегенеративная операция.
Преобразователи частоты ШИМ с вектором потока
Технология преобразователей частоты ШИМ по-прежнему считается новой и постоянно совершенствуется с помощью новых устройств переключения питания и интеллектуальных 32-разрядных микропроцессоров. Преобразователи частоты всегда были ограничены приложениями с «нормальным крутящим моментом», в то время как приложения с высоким крутящим моментом и низкими оборотами были прерогативой приводов постоянного тока. Это изменилось недавно с введением нового поколения преобразователей частоты PWM, инверторов частоты с вектором потока.
Преобразователи частоты с вектором потока используют метод управления крутящим моментом, аналогичный методу управления приводами постоянного тока, включая широкий диапазон регулирования скорости с быстрым откликом. Преобразователи частоты с вектором потока имеют ту же силовую часть, что и все преобразователи частоты с ШИМ, но используют сложный замкнутый контур управления от двигателя до микропроцессора преобразователя частоты. Положение и скорость ротора двигателя отслеживаются в режиме реального времени с помощью резольвера или цифрового энкодера для определения и управления фактической скоростью, крутящим моментом и производимой мощностью двигателя.
Преобразователи частоты с вектором потока имеют ту же силовую часть, что и все преобразователи частоты с ШИМ, но используют сложный замкнутый контур управления от двигателя до микропроцессора преобразователя частоты. Положение и скорость ротора двигателя отслеживаются в режиме реального времени с помощью резольвера или цифрового энкодера для определения и управления фактической скоростью, крутящим моментом и производимой мощностью двигателя.
Управляя секцией инвертора в ответ на фактические условия нагрузки на двигатель в режиме реального времени, можно получить превосходное управление крутящим моментом. Индивидуальность двигателя должна быть запрограммирована или изучена преобразователем частоты, чтобы он мог выполнять алгоритмы векторного управления. В большинстве случаев требуются специальные двигатели из-за требований к крутящему моменту, ожидаемых от двигателя.
Ниже перечислены преимущества этой новой технологии преобразователя частоты.
-
Превосходный контроль скорости двигателя, крутящего момента и мощности.

- Быстрая реакция на изменения команд нагрузки, скорости и крутящего момента.
- Способность обеспечить 100% номинальный крутящий момент на 0 скорости.
- Более низкие затраты на техническое обслуживание по сравнению с двигателями постоянного тока и преобразователями частоты.
Как обычно, есть недостатки.
- Более высокая начальная стоимость по сравнению со стандартными преобразователями частоты PWM.
- В большинстве случаев требуется специальный двигатель.
- Параметры настройки преобразователя частоты сложны.
В то время как технология вектора потока обеспечивает превосходную производительность для некоторых специальных приложений, она будет считаться «излишней» для большинства приложений, которые хорошо обслуживаются стандартными преобразователями частоты с ШИМ.
Как работает широтно-импульсная модуляция в ЧРП
Назад к блогу
Приложения и инструкции, как это работает
Майк Глэмп |
10 октября 2021 г.
Рекомендуемые продукты
Рис. 1. ЧРП состоит из 3 основных частей.
В секции преобразователя используется выпрямительный диодный мост для преобразования входного напряжения переменного тока в напряжение постоянного тока. Секция шины постоянного тока состоит из батареи конденсаторов, которая используется для сглаживания напряжения постоянного тока от секции преобразователя и обеспечения некоторой емкости накопления напряжения. Секция инвертора частотно-регулируемого привода получает напряжение постоянного тока от шины постоянного тока и преобразует его обратно в переменное напряжение и переменное напряжение переменной частоты, используемые для управления двигателем.
Что такое широтно-импульсная модуляция (ШИМ)?
Процесс, связанный с преобразованием напряжения постоянного тока в переменное напряжение переменного напряжения с переменной частотой (VVVF) в секции инвертора ЧРП, называется широтно-импульсной модуляцией или ШИМ.
В широтно-импульсной модуляции используются транзисторы, которые включают и выключают постоянное напряжение в определенной последовательности для создания переменного выходного напряжения и частоты. Сегодня в большинстве частотно-регулируемых приводов используются биполярные транзисторы с изолированным затвором или IGBT. Типичная конфигурация IGBT в инверторной секции частотно-регулируемого привода показана ниже на рисунке 2.
Рисунок 2 – Схема выходного каскада IGBT частотно-регулируемого привода.
Транзисторы действуют как переключатель, соединяющий шину постоянного тока с обмотками двигателя. ЧРП с входным напряжением 480 В перем. тока будет иметь шину постоянного тока с напряжением примерно 678 В пост. тока. Таким образом, «импульс» относится к включению и выключению транзисторов, создающих импульс напряжения с амплитудой приблизительно 678 В постоянного тока.
Целью ШИМ-управления является создание выходного синусоидального сигнала тока для создания крутящего момента в двигателе.
Для того чтобы ток протекал между двумя фазами двигателя выше, по крайней мере один транзистор в верхней части диаграммы и один в нижней части диаграммы должны быть активированы. Используя определенные комбинации транзисторов, ток можно индуцировать в любом направлении между фазами.
Например, если T1 и T6 разомкнуты, ток будет течь от положительной шины постоянного тока через фазы U-V двигателя, а затем к отрицательной шине постоянного тока. Если T3 и T4 разомкнуты, то ток будет течь от положительной шины постоянного тока через фазу двигателя от V до U к отрицательной шине постоянного тока.
Одним из преимуществ использования частотно-регулируемого привода с технологией ШИМ является возможность управления величиной тока, проходящего через обмотки двигателя, что при работе роторного промышленного двигателя преобразуется в управление величиной крутящего момента на валу двигателя.
В случае частотно-регулируемого привода, в котором используется технология ШИМ, это делается путем изменения среднеквадратичного напряжения на двигателе. Управляя количеством времени, в течение которого каждый импульс включается и выключается, можно контролировать результирующее среднеквадратичное напряжение на фазах двигателя. «Ширина» импульса влияет на результирующее среднеквадратичное значение выходного напряжения.
Управляя количеством времени, в течение которого каждый импульс включается и выключается, можно контролировать результирующее среднеквадратичное напряжение на фазах двигателя. «Ширина» импульса влияет на результирующее среднеквадратичное значение выходного напряжения.
Более длительное время включения импульса приводит к более высокому среднеквадратичному напряжению на фазах.
ШИМ-представление с более длительным временем включения.
Более короткое время включения импульсов приводит к более низкому среднеквадратичному напряжению на фазах двигателя. Представление
PWM с более коротким временем «ON». Таким образом, модулируя ширину импульса каждой последующей полуволны, можно управлять среднеквадратичным напряжением на фазах двигателя. Результирующее переменное среднеквадратичное напряжение позволяет частотно-регулируемому приводу изменять величину тока, протекающего между фазами двигателя. Форма волны тока, создаваемая в процессе ШИМ, также зависит от частоты переключения IGBT.
Частота переключения
Частота переключения IGBT относится к скорости включения/выключения отдельных IGBT. Типичные используемые частоты переключения составляют 4 кГц, 8 кГц и даже до 16 кГц. Более высокая скорость переключения обеспечит более чистую форму сигнала для двигателя, так как будет больше импульсов на каждой полуволне.
В дополнение к крутящему моменту (току) двигателя можно также управлять скоростью (частотой) двигателя с помощью ШИМ. Изменяя период импульсов напряжения, которые индуцируют ток в фазах двигателя, можно изменить результирующую частоту выходного тока.
Различные формы сигналов ШИМ приводят к разным выходным частотам.
KEB – The Drive Expert
Объединив управление шириной импульса и периодом группы импульсов, приводы с ШИМ обеспечивают средства для управления выходным напряжением и частотой двигателя переменного тока.
Возможность управления крутящим моментом и скоростью двигателя переменного тока открывает возможности применения для разработчиков машин. Скорость двигателя может быть оптимизирована для приложения, чтобы повысить эффективность системы (например, управление вентилятором). Скорость двигателя может быть увеличена выше номинальной скорости двигателя для увеличения производительности. Крутящий момент двигателя можно ограничить, чтобы защитить механические компоненты системы. Контролируемый пуск и останов двигателей позволяет исключить механические компоненты, которые со временем изнашиваются.
Скорость двигателя может быть оптимизирована для приложения, чтобы повысить эффективность системы (например, управление вентилятором). Скорость двигателя может быть увеличена выше номинальной скорости двигателя для увеличения производительности. Крутящий момент двигателя можно ограничить, чтобы защитить механические компоненты системы. Контролируемый пуск и останов двигателей позволяет исключить механические компоненты, которые со временем изнашиваются.
Свяжитесь с инженером KEB America, чтобы обсудить, как мы можем применить частотно-регулируемые приводы для улучшения вашего приложения.
Плата преобразователя ШИМ
После обсуждений на форуме MS2/extra я разработал плату, которая принимает сигнал ШИМ (например, выход для FIDLE или управление усилением с помощью кода MS2/extra) и умножает частоту, сохраняя при этом тот же рабочий цикл без потери точности. Это позволяет людям управлять устройством (соленоидом, клапаном, двигателем), которому требуется более высокая частота, чем может сделать код, или использовать более низкую частоту в коде (с соответствующим более высоким разрешением) и заставить устройство работать на более высокой частоте.
Центральный процессор на плате считывает сигнал ШИМ и сохраняет тот же рабочий цикл, но умножает частоту. Он был протестирован с кодом MS2/extra от 11,1 Гц до 78 Гц с хорошими результатами, но он будет работать от 8 Гц до более чем 300 Гц. Выходную частоту можно выбрать, установив перемычки, и результирующие множители частоты могут быть 2, 4, 8, 16, 32, 64, 128 и 256. При входной частоте 78 Гц от MS2 и множителе 256 ШИМ ЦП преобразователя будет генерировать ШИМ-сигнал частотой 19968 Гц с разрешением 0,25%. Поэтому можно с уверенностью сказать, что любая используемая комбинация входной частоты и множителя не потеряет точности. Кроме того, рабочий цикл ШИМ (и частота) обновляется для каждого цикла входного сигнала, поэтому при 11,1 Гц рабочий цикл выходного сигнала обновляется 11,1 раза в секунду, а при 78 Гц обновление выполняется 78 раз в секунду. И вход считывается с помощью 16-битного таймера с 12-16 эффективными битами в зависимости от входной частоты.
Плата размером 1 x 1 дюйм имеет 2 монтажных отверстия и показана вверху страницы. В комплект входят все компоненты, показанные ниже, а также TIP122 и монтажный комплект с изолятором, которых нет на рисунке. В комплект входит сокет для процессора, но его использование необязательно, так как он увеличивает высоту готовой платы. При пайке процессора к плате следует соблюдать дополнительную осторожность, если он не используется, поскольку он более чувствителен к теплу и статическому электричеству.
В комплект входят все компоненты, показанные ниже, а также TIP122 и монтажный комплект с изолятором, которых нет на рисунке. В комплект входит сокет для процессора, но его использование необязательно, так как он увеличивает высоту готовой платы. При пайке процессора к плате следует соблюдать дополнительную осторожность, если он не используется, поскольку он более чувствителен к теплу и статическому электричеству.
Примечание. Сокет ЦП больше не входит в комплект.
Плата протестирована на выходах MegaSquirt FIDLE и JS11 с сигналом FIDLE и сигналом управления наддувом. Плате требуется входной сигнал 5 В, и она не может принимать входной сигнал 12 В, поэтому она не может использовать один из выходов IAC в качестве входа. Что можно сделать, так это использовать делитель напряжения (2 резистора) для уменьшения напряжения. Одна вещь, которую необходимо проверить, это то, может ли UDN2916 питаться 5 В вместо 12 В (на JS9), что упростит получение сигнала 5 В.
Сборка заключается в припаивании к плате всех компонентов, кроме TIP122. Это необходимо будет припаять после того, как плата будет установлена на корпусе, как описано в следующем разделе.
Это необходимо будет припаять после того, как плата будет установлена на корпусе, как описано в следующем разделе.
Перед началом сборки решите, будете ли вы использовать процессорный сокет. Как упоминалось выше, это необязательно и упростит замену ЦП при необходимости и защитит ЦП от нагрева при пайке. Однако это сделает собранную сборку выше, что может привести к некоторому физическому взаимодействию с другими компонентами в зависимости от местоположения. Проверьте, где вы хотите установить плату, прежде чем принять решение об использовании разъема.
При использовании разъема сначала припаяйте его к плате. Если нет, то припаивайте процессор. Припаяйте 2 резистора, диод и 2 конденсатора.
Примечание. Сокет ЦП больше не входит в комплект.
Необходимо будет установить перемычки, чтобы получить желаемый множитель частоты для выходного ШИМ-сигнала. Перемычки можно сделать из проводов, которые были отрезаны от резисторов и конденсаторов при сборке.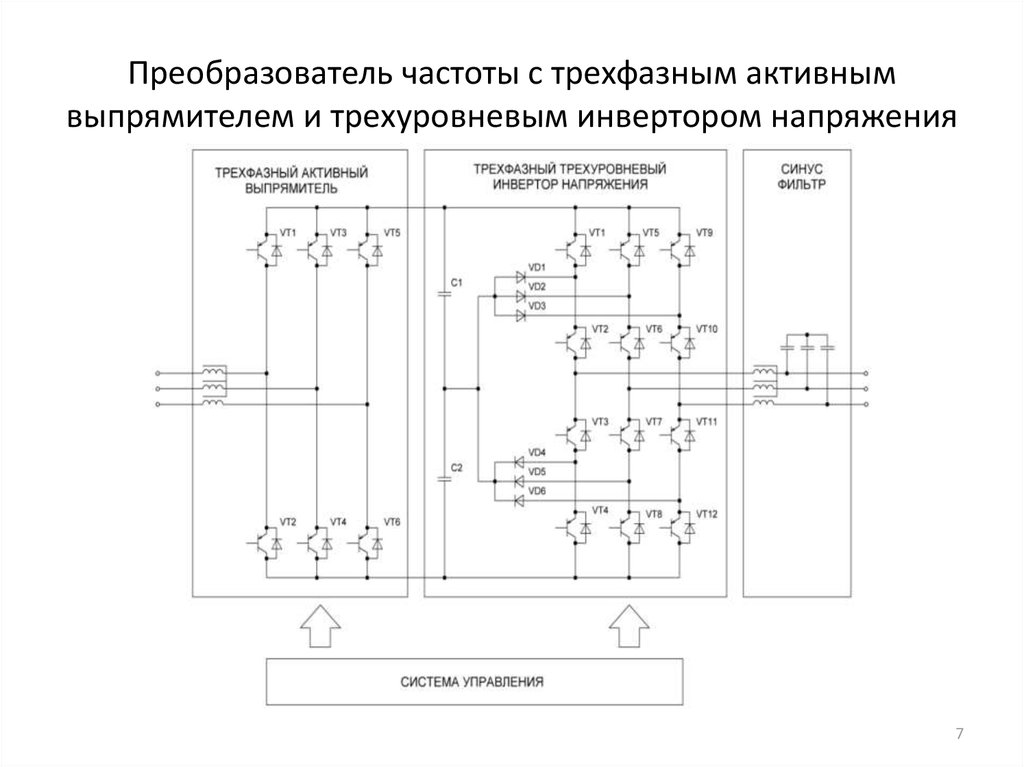 На рисунках ниже показаны перемычки, необходимые для получения желаемого множителя.
На рисунках ниже показаны перемычки, необходимые для получения желаемого множителя.
| Jumpers | Multiplier |
|---|---|
| 2 (no jumper) | |
| 4 | |
| 8 | |
| 16 | |
| 32 | |
| 64 | |
| 128 | |
| 256 |
4 9s.
Первый шаг — решить, где вы собираетесь установить плату. Затем вам потребуются два отверстия диаметром 0,125 дюйма (3,175 мм) для установки платы. Используйте плату в качестве шаблона. Затем необходимо просверлить отверстие для транзистора. корпус МС Транзистор крепится к плате снизу, так что выводы загнуты 90 градусов вверх и на него опускается доска. Присоединив плату к корпусу с отпаянными выводами TIP122 в соответствующих местах, просверлите в корпусе отверстие диаметром 0,125 дюйма, используя транзистор в качестве шаблона.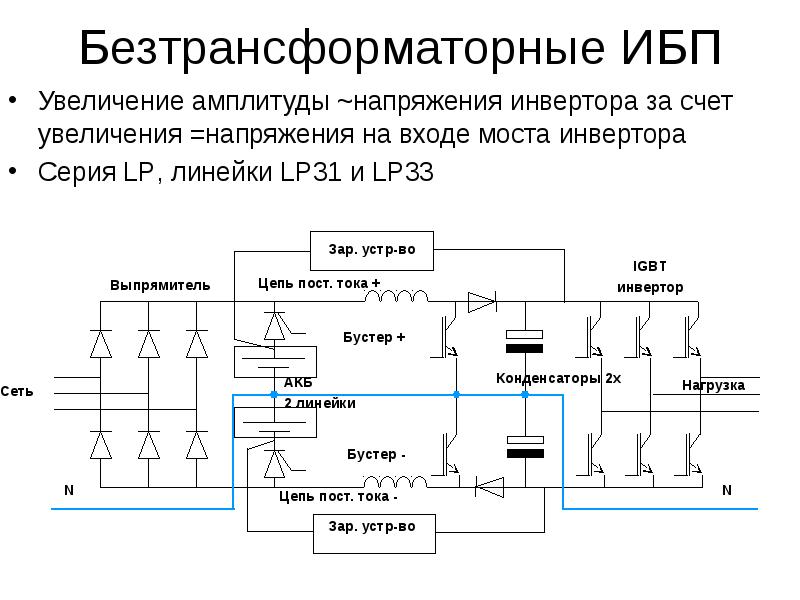
После этого TIP122 необходимо установить в корпус с помощью изолятор и монтажный комплект и плата, опущенная на него и прикрепленная к корпусу.Затем выводы TIP122 можно припаять к плате.После пайки все снять и очистить плату от флюса.Установить обратно в корпус и нанести теплоотводную смазку изолятор как со стороны TIP122, так и со стороны корпуса.
Проводка — это следующий и последний шаг. Подключите контактную площадку IN на плате к выбранному выходу на плате MegaSquirt (FIDLE или JS11). Подключите контактную площадку OUT к соленоиду или клапану, которым нужно управлять. Это можно сделать через один из запасных контактов на DB37. Подключите контактные площадки 5V и GND к источнику питания на плате MS. Для этого можно использовать контактную площадку 5V и GND в области прототипа. Подсоедините контакты 12V и A_GND к автомобильному аккумулятору (или аналогичному). Опять же, можно использовать запасные контакты DB37 или платы MS 12 В и заземление. В последнем случае может возникнуть шум, поэтому это необходимо проверить.
Платы доступны только в виде полных комплектов по цене 25 долларов США за комплект плюс стоимость доставки. Стоимость доставки до 2 полных комплектов составляет 4,50 долларов США в Северной Америке и 7,50 долларов США в остальных странах мира. Это для обычной почтовой доставки из Канады, что означает отсутствие страховки и гарантии времени доставки.
Обратите внимание, что обычная почта в США работает нерегулярно. Срок доставки был от менее 2 недель до более 4 недель. Если это неприемлемо, вы можете запросить услугу Xpresspost, которая ускорит доставку , но будет стоить дополнительно 12 долларов США . Свяжитесь со мной для уточнения деталей и цены.
Примечание: Для завершения установки вам потребуется термопаста и провода (не входят в комплект).
В связи с возможной забастовкой в CanadaPost продажи приостановлены.
Вы можете связаться со мной через личку на форуме msextra, где мое имя пользователя racingmini_mtl
или по электронной почте: доски на сайте jbperf. com
com
2
Посмотреть все Формирователи сигналов
Временно нет в наличии — под заказ на отправку 22.11.2022, доставка в течение 4 рабочих дней с даты отгрузки
Добавить в корзинуtickAdded
Посмотреть корзину
Цена за штуку
3 3 300.13
| units | Per Unit |
| 1 + | MYR1,300.13 |
- RS Stock No.:
- 134-8681
- Произв.
 Part No.:
Part No.: - 2
- 8
- Manufacturer:
- Phoenix Contact
- COO (Country of Origin):
- DE
Technical data sheets
- docPdfDatasheet
Legislation and Compliance
- Главный операционный директор (страна происхождения):
- DE
Подробная информация о продукте
MINI MCR — датчики частоты
Phoenix contact 2
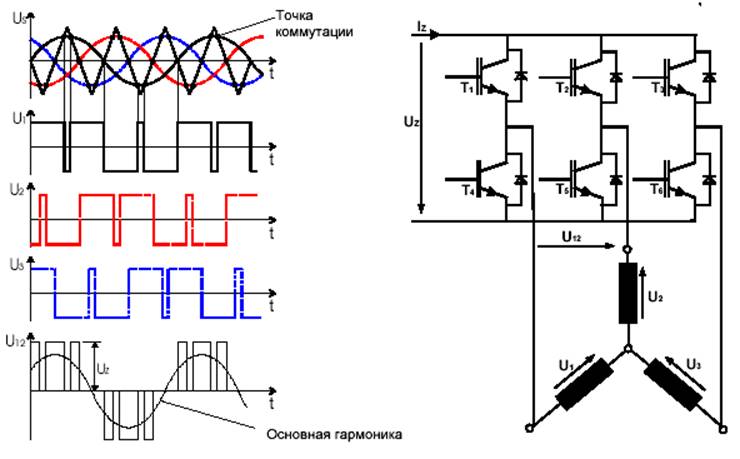 Этот модуль может обрабатывать входы от 0 мА до 24 мА и входное напряжение от 0 В до 12 В, а выходной сигнал от 0 мА до 21 мА и выходное напряжение от 0 В до 10,5 В. Модель 2
Этот модуль может обрабатывать входы от 0 мА до 24 мА и входное напряжение от 0 В до 12 В, а выходной сигнал от 0 мА до 21 мА и выходное напряжение от 0 В до 10,5 В. Модель 26 имеет съемную технологию, упрощающую настройку, и сертифицирована по стандарту ATEX для установки в зоне 2.
Модуль можно настроить с помощью легкодоступного бокового DIP-переключателя для изменения параметров по умолчанию.
Features and benefits:
- Freely adjustable input and output
- ATEX Zone-2 installation (nA)
- NPN, PNP, MANUR and frequency signals – 0.002 Hz up to 200kHz
- Conversion сигналов частоты и ШИМ в аналоговый формат
- Усиленная изоляция в соответствии с IEC 61010-1
- Напряжение питания от 9,6 В до 30 В пост. тока
Применения:
- Electrical isolation
- Conversion
- Amplification of filtering of frequency and PWM signals
- NAMUR proximity sensors
- NPN and PNP output sensors
Accessories:
TBUS Din rail connector – 489-2825
USB программатор (S-PORT) – 801-6107
Технические характеристики
| Атрибут | Значение |
| Module Type | Frequency Converter |
| Input Signal Type | Frequency, PWM |
| Output Signal Type | Transistor |
| Supply Voltage | 24V dc |
| Input Range | 0,002 Гц → 200 кГц, 0,002 Гц → 1000 Гц |
| Выходной диапазон | 0 → 10,5 В, 0 → 21 мА |
| DIN Rail Mount | |
| Operating Temperature Range | -40 → +70°C |
| Minimum Operating Temperature | -40°C |
| Termination | Push-In |
| Maximum Operating Temperature | +70°C |
| MINI MCR |
Характеристики широтно-импульсной модуляции и влияние частоты и коэффициента заполнения
Ключевые выводы
● Узнайте о широтно-импульсной модуляции (ШИМ).
● Получите более полное представление о ШИМ как методе управления.
● Узнайте больше о влиянии рабочего цикла и частоты в ШИМ.
Средний выходной сигнал сигнала широтно-импульсной модуляции на входе.
В электронике модуляция — это применение контролирующего или изменяющего воздействия на что-либо. Мы также называем это изменением высоты тона, силы или тона частоты, как в человеческом голосе.
Однако с точки зрения приложений мы обычно сталкиваемся с методами модуляции, используемыми для управления такими устройствами, как двигатели постоянного тока или светодиоды. В таких случаях метод называется широтно-импульсной модуляцией (ШИМ).
Методы широтно-импульсной модуляции
Как указывалось ранее, модуляция относится к способности контролировать устройство или систему. Таким образом, подобные методы существуют во множестве приложений в области электроники. Одним из наиболее распространенных применений модуляции в качестве метода управления является ШИМ.
Одним из наиболее распространенных применений модуляции в качестве метода управления является ШИМ.
Мы сталкиваемся с широким использованием ШИМ из-за его адаптивного характера. ШИМ — это метод, который снижает среднюю мощность подаваемого электрического сигнала. Более того, этот процесс достигается за счет эффективного разделения сигнала на отдельные части. С точки зрения функциональной работы ШИМ обеспечивает этот контроль, контролируя средний ток и напряжение, которые он подает на нагрузку. Этот метод достигается путем быстрого включения и выключения переключателя между нагрузкой и источником.
Однако, если мы сравним периоды включения и выключения переключателя, увеличение времени включения по сравнению со временем выключения увеличивает общую мощность, подаваемую на нагрузку. В общем, этот метод управления имеет много полезных применений. Например, ШИМ в сочетании с отслеживанием точки максимальной мощности (MPPT) является одним из основных методов снижения выходной мощности солнечной панели для облегчения ее использования батареей.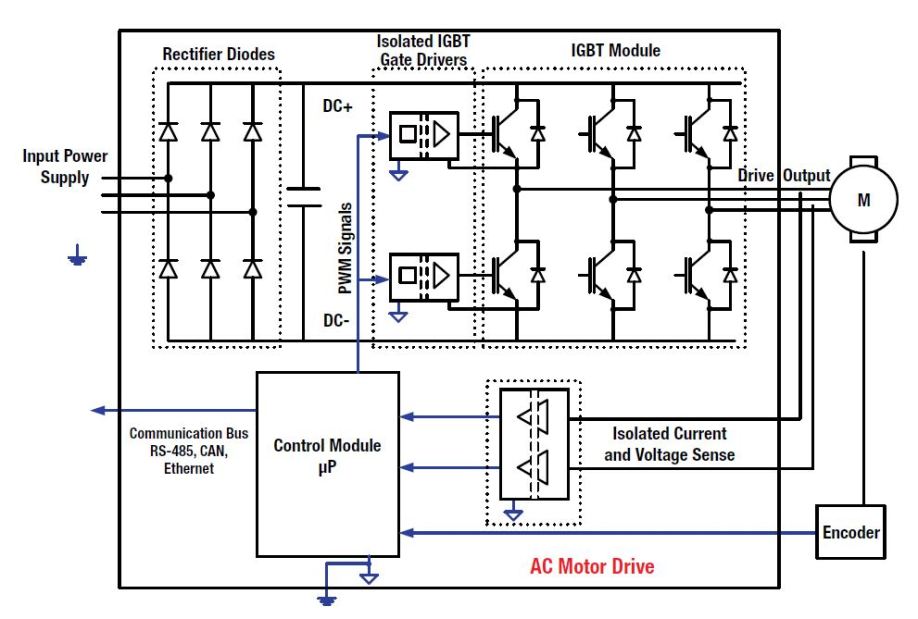
Частота широтно-импульсной модуляции
В целом, ШИМ в основном подходит для работы инерционных устройств, таких как двигатели, на которые не так быстро влияет это явное переключение. Это в равной степени относится и к светодиодам с ШИМ из-за линейного характера влияния входного напряжения на их функциональность. Однако частота переключения ШИМ должна быть достаточно высокой, чтобы не влиять на нагрузку, а результирующий сигнал, воспринимаемый нагрузкой, также должен быть плавным.
Как правило, частота, с которой должен переключаться источник питания, сильно различается в зависимости от устройства и его применения. Например, в электрической плите переключение должно производиться несколько раз в минуту, а для блоков питания ПК и аудиоусилителей — до десятков и сотен кГц. Одним из существенных преимуществ использования ШИМ является то, что потери мощности в коммутационных устройствах существенно низки. Фактически, в выключенной фазе переключателя ток практически отсутствует. Также в фазе включения коммутатора практически отсутствует падение напряжения на коммутаторе при передаче мощности на его нагрузку.
Также в фазе включения коммутатора практически отсутствует падение напряжения на коммутаторе при передаче мощности на его нагрузку.
Поскольку потеря мощности является следствием как напряжения, так и тока, это приводит к практически нулевой потере мощности для ШИМ. Кроме того, ШИМ идеально подходит для цифрового управления из-за природы цифровой технологии (т. Е. 1 и 0 или состояния ВКЛ и ВЫКЛ). В общем, внутренняя природа цифровых технологий легко поддается функциональности ШИМ, и, таким образом, можно легко установить необходимый рабочий цикл.
Характеристики ШИМ
Сигнал ШИМ — это метод создания цифровых импульсов для управления аналоговыми цепями. Есть два основных компонента, которые определяют поведение ШИМ-сигнала:
-
Рабочий цикл : Рабочий цикл — это часть одного периода, когда система или сигнал активны. Обычно мы выражаем рабочий цикл в виде отношения или процента.
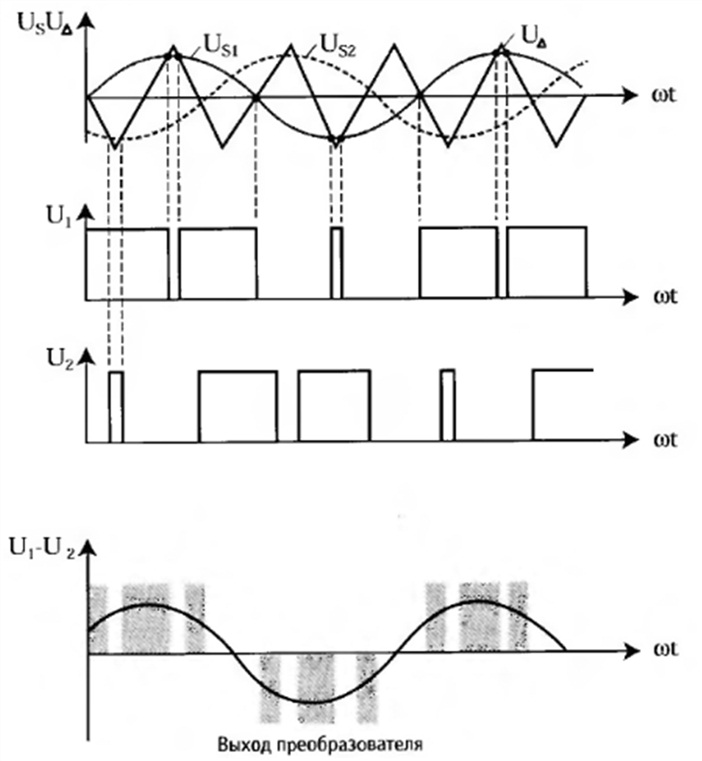 Период — это время, за которое сигнал завершает полный цикл включения-выключения.
Период — это время, за которое сигнал завершает полный цикл включения-выключения. -
Частота : Скорость, с которой что-то повторяется или происходит в течение определенного периода времени. Другими словами, скорость, с которой происходит вибрация, создающая волну, например звуковую, радио- или световую, обычно рассчитывается в секунду.
Что касается коэффициента заполнения, когда уровень сигнала высок, мы называем его включенным, а рабочий цикл описывает количество времени, в течение которого сигнал находится во включенном состоянии. Мы измеряем или количественно определяем рабочий цикл в процентах. Этот процент представляет собой конкретное время, в течение которого цифровой сигнал включен в течение периода (интервала), и этот интервал является обратным значением частоты сигнала.
Например, цифровой сигнал, который половину времени проводит во включенном состоянии и половину времени в выключенном состоянии, будет иметь коэффициент заполнения 50 %, т.![]() е. идеальную прямоугольную волну. Цифровой сигнал, который проводит три четверти времени во включенном состоянии и одну четверть времени в выключенном состоянии, будет иметь рабочий цикл 75%.
е. идеальную прямоугольную волну. Цифровой сигнал, который проводит три четверти времени во включенном состоянии и одну четверть времени в выключенном состоянии, будет иметь рабочий цикл 75%.
Характеристики ШИМ Продолжение
Мы обсудили широкий спектр приложений, которые идеально подходят для функциональных возможностей ШИМ, включая светодиоды и двигатели (сервоприводы). Поскольку частота является основным компонентом метода ШИМ, понятно, что частота влияет на способность ШИМ осуществлять управление в приложении. Следовательно, частота прямоугольных импульсов должна быть достаточно высокой, например, для управления светодиодами, чтобы получить надлежащий эффект затемнения.
Например, рабочий цикл 20 % при частоте 1 Гц будет заметен человеческому глазу, когда светодиод выключается и снова включается. Принимая во внимание, что рабочий цикл 20% при частоте 100 Гц или выше просто будет демонстрировать немного менее тусклый световой поток.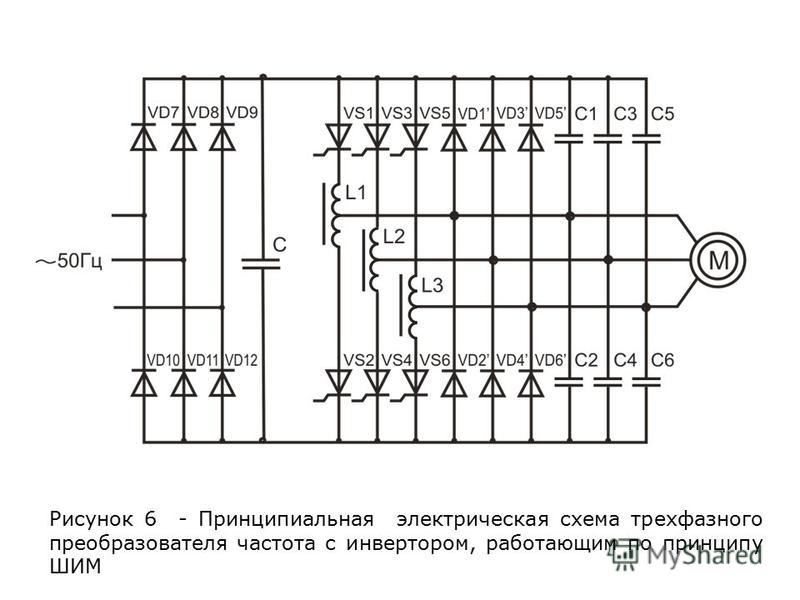
Я уверен, вы знаете, что мы можем использовать ШИМ для управления двигателями (сервоприводами). Мы также можем использовать его для управления углом серводвигателя. С точки зрения приложений это выгодно, когда мы прикрепляем его к механическому устройству, такому как роботизированная рука, в сборочной или производственной среде. Это идеально, потому что в сервоприводе используется вал, который поворачивается в определенное положение в зависимости от его линии управления.
Частота ШИМ
Частота или период зависят от управления конкретным сервоприводом. Как правило, серводвигатель ожидает обновления каждые 20 мс с импульсом от 1 мс до 2 мс. Это соответствует рабочему циклу от 5% до 10% при 50 Гц. Теперь, если импульс составляет 1,5 мс, серводвигатель будет на 90 градусов, 1 мс 0 градусов и 2 мс 180 градусов. Таким образом, обновив сервопривод со значением от 1 мс до 2 мс, мы можем получить полный диапазон движения.
ШИМ также в настоящее время используется в некоторых системах связи, и его рабочий цикл используется для передачи информации по каналам связи. В целом, ШИМ — это методология или техника генерации низкочастотных выходных сигналов из высокочастотных импульсов.
В целом, ШИМ — это методология или техника генерации низкочастотных выходных сигналов из высокочастотных импульсов.
При быстром переключении выходного напряжения ветви инвертора между верхним и нижним напряжениями (шина постоянного тока) низкочастотное выходное напряжение в основном становится средним напряжением за период переключения.
ШИМ как метод управления идеально подходит для широкого круга приложений. Наряду со своим рабочим циклом частота ШИМ является основой его функциональности в качестве метода управления.
Синусоида с ШИМ.
Для разработки функциональных схем, использующих широтно-импульсную модуляцию, необходимо иметь подходящее программное обеспечение для проектирования и анализа печатных плат, которое поможет вам сделать все правильно с первого раза. OrCAD от Cadence — это одно из таких программ с набором надежных инструментов, которые помогут вам в проектировании всех ваших печатных плат.
