Принцип схемы интерфейса шины CANopen и уведомление о дизайне — отраслевые знания — Новости
Принцип схемы интерфейса шины CANopen и соображения проектирования
CAN-шина — это сеть последовательной связи, которая эффективно поддерживает распределенное управление и управление в реальном времени. Он широко используется в области автоматического управления для его высокой производительности и высокой надежности. Чтобы улучшить возможности системы и увеличить расстояние связи, Philips 82C250 используется в практических приложениях в качестве интерфейса между контроллером CAN и физической шиной, то есть CAN-трансивером для повышения дифференциальной передачи шины и МОЖЕТ контролировать. Возможность дифференциального приема устройства. Для дальнейшего усиления противоинтерференционной способности часто устанавливается схема оптоизоляции между контроллером CAN и приемопередатчиком. Схема типичной схемы шины CAN показана на рисунке 1.
Рис. 1 Типичная схема схемы интерфейса шины CAN
1 Типичная схема схемы интерфейса шины CAN
1 Основные проблемы в проектировании схем интерфейса
1.1 Схема оптической изоляции
Хотя оптоизолированная схема может повысить противоинтерференционную способность системы, она также увеличит время задержки передачи эффективного сигнала петли CAN-шины, что приведет к уменьшению скорости связи или расстояния. 82C250 и другие модели CAN-трансиверов способны к мгновенному помехоустойчивости, снижению радиочастотных помех (RFI) и тепловой защите. Схемы ограничения тока также обеспечивают дополнительную защиту шины. Поэтому, если дальность передачи поля коротка и электромагнитные помехи малы, оптическая изоляция может не быть принята, чтобы система могла достичь максимальной скорости связи или расстояния, а схема интерфейса может быть упрощена. Если для полевой среды требуется оптическая изоляция, следует использовать высокоскоростные оптоизоляторы, чтобы уменьшить время задержки распространения сигнала эффективной шины CAN. Например, высокоскоростной оптрон 6N137 имеет короткую задержку распространения 48 нс, которая близка к схеме TTL. Уровень задержки.
Например, высокоскоростной оптрон 6N137 имеет короткую задержку распространения 48 нс, которая близка к схеме TTL. Уровень задержки.
1.2 Изоляция блока питания
Блок питания Vdd и Vcc, используемый с обеих сторон оптоэлектронного изолирующего устройства, должен быть полностью изолирован. В противном случае оптоэлектронная изоляция потеряет свою функцию. Выделение источника питания может быть обеспечено блоком изоляции источника питания постоянного тока с низким энергопотреблением, например, 5 В с двойным изолированным блоком постоянного тока с низким энергопотреблением с стандартным выводом DIP-14.
1.3. Удлинительный резистор
Входной терминал TXD передачи данных CAN-приемопередатчика 82C250 на фиг. 1 подключен к выходному выводу OUT фотопары 6N137. Обратите внимание, что TXD необходимо одновременно подключать к нагрузочному резистору R3. С одной стороны, R3 гарантирует, что фототранзистор в 6N137 выводит низкий уровень при его включении и выдает высокий уровень, когда он выключен.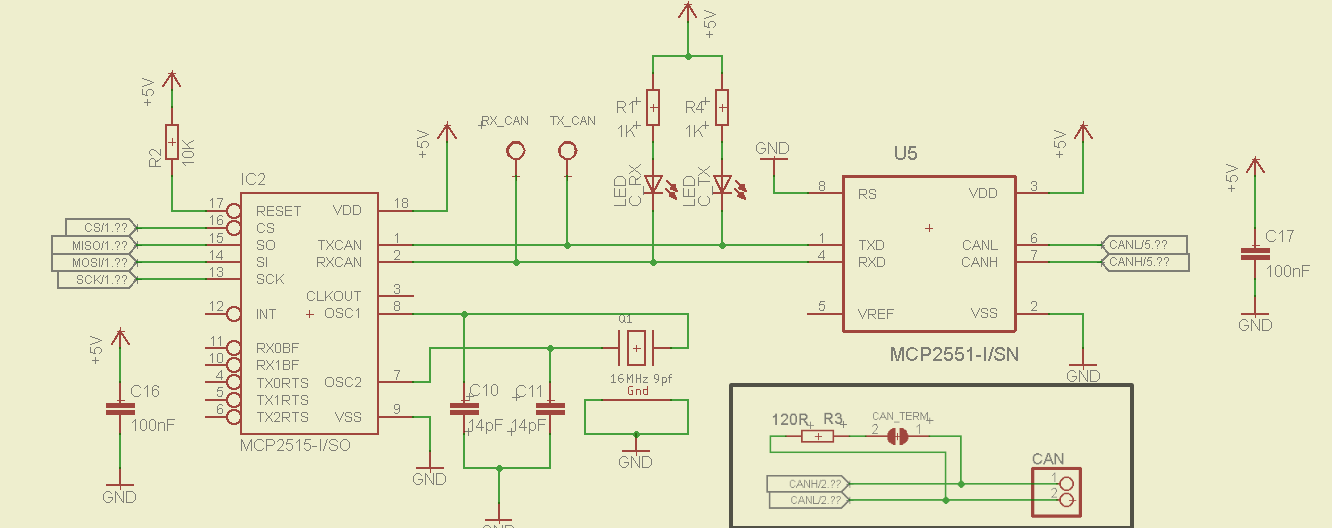 С другой стороны, это также требование шины CAN. В частности, состояние TXD-терминала 82C250 определяет состояние входных / выходных клемм CAN / CANL с высоким и низким CAN-потенциалом (см. Таблицу 1). Спецификация шины CAN заявляет, что шина должна быть рецессивной во время периодов простоя. То есть состояние узлов по умолчанию в сети CAN является рецессивным. Это требует, чтобы состояние по умолчанию TXD-стороны 82C25O было логическим 1 (высокий уровень). По этой причине через R3 должно быть обеспечено, чтобы статус TXD-терминала был логическим 1 (высокий уровень), когда данные не передаются или возникает ненормальное состояние.
С другой стороны, это также требование шины CAN. В частности, состояние TXD-терминала 82C250 определяет состояние входных / выходных клемм CAN / CANL с высоким и низким CAN-потенциалом (см. Таблицу 1). Спецификация шины CAN заявляет, что шина должна быть рецессивной во время периодов простоя. То есть состояние узлов по умолчанию в сети CAN является рецессивным. Это требует, чтобы состояние по умолчанию TXD-стороны 82C25O было логическим 1 (высокий уровень). По этой причине через R3 должно быть обеспечено, чтобы статус TXD-терминала был логическим 1 (высокий уровень), когда данные не передаются или возникает ненормальное состояние.
| Статус TXD | Уровень CANH (V) | Уровень CANL (V) | Состояние шины CAN |
| 1 | 2.5 | 2.5 | Рецессивный (логический 1) |
| 0 | 3,5 | 1,5 | Доминирующий (логический 0) |
Форма 1. Отношение TXD с CANH и CANL
Отношение TXD с CANH и CANL
1.4 Согласование импеданса шины
К концу шины CAN необходимо подключить два резистора 120 Ом. Они играют важную роль в согласовании импеданса шины и не могут быть опущены. В противном случае надежность и антиинтерференция передачи данных по шине будут значительно уменьшены, и даже связь может быть невозможна.
1.5 Другие меры по борьбе с помехами
Чтобы улучшить помехоустойчивость интерфейсной схемы, рассмотрите следующие меры:
(1) Подключите два небольших конденсатора на 30 пФ параллельно между клеммами CANH и CANL 82C25O и заземлением для фильтрации высокочастотных помех на шине и предотвращения электромагнитного излучения.
(2) Подключите резистор 5 Ом последовательно между клеммами CANH и CANL 82C250 и шиной CAN для ограничения тока и защиты 82C250 от сверхтока.
(3) Добавьте конденсатор развязки 100 нФ между клеммой источника питания 82C25O, 6N137 и другими интегральными схемами и землей для уменьшения помех.
2. Заключение
Интерфейсная схема является важной частью сети CAN-шины. Его надежность и безопасность напрямую влияют на работу всей сети связи. В этой статье кратко изложены некоторые ключевые проблемы, которые следует учитывать при разработке схем интерфейса CAN. Только, хватая ключ в дизайне, мы можем улучшить качество и производительность нескольких интерфейсных цепей и обеспечить надежную и надежную работу сети CAN-шин.
Введение в протокол CAN | CAN — технологии
Промышленная сеть реального времени CAN представляет собой сеть с общей средой передачи данных. Это означает, что все узлы сети одновременно принимают сигналы передаваемые по шине. Невозможно послать сообщение какому-либо конкретному узлу. Все узлы сети принимают весь трафик передаваемый по шине. Однако, CAN-контроллеры предоставляют аппаратную возможность фильтрации CAN-сообщений.
Каждый узел состоит из двух составляющих. Это собственно CAN контроллер, который обеспечивает взаимодействие с сетью и реализует протокол, и микропроцессор (CPU).
CAN контроллеры соединяются с помощью дифференциальной шины, которая имеет две линии — CAN_H (can-high) и CAN_L (can-low), по которым передаются сигналы. Логический ноль регистрируется, когда на линии CAN_H сигнал выше, чем на линии CAN_L. Логическая единица — в случае когда сигналы CAN_H и CAN_L одинаковы (отличаются менее чем на 0.5 В). Использование такой дифференциальной схемы передачи делает возможным работу CAN сети в очень сложных внешних условиях. Логический ноль — называется доминантным битом, а логическая единица — рецессивным. Эти названия отражают приоритет логической единицы и нуля на шине CAN. При одновременной передаче в шину лог. нуля и единицы, на шине будет зарегестрирован только логический ноль (доминантный сигнал), а логическая единица будет подавлена (рецессивный сигнал).
Типы сообщений сети CAN.
Данные в CAN передаются короткими сообщениями-кадрами стандартного формата. В CAN существуют четыре типа сообщений:
- Data Frame
- Remote Frame
- Error Frame
- Overload Frame
Data Frame — это наиболее часто используемый тип сообщения. Он состоит из следующих основных частей:
Он состоит из следующих основных частей:
- поле арбитража (arbitration field) определяет приоритет сообщения в случае, когда два или более узлов одновременно пытаются передать данные в сеть. Поле арбитража состоит в свою очередь из:
- для стандарта CAN-2.0A, 11-битного идентификатора + 1 бит RTR (retransmit)
- для стандарта CAN-2.0B, 29-битного идентификатора + 1 бит RTR (retransmit)
Следует отметить, что поле идентификатора, несмотря на свое название никак не идентифицирует само по себе ни узел в сети, ни содержимое поля данных. Для Data кадра бит RTR всегда выставлен в логический ноль (доминантный сигнал).
- поле данных (data field) содержит от 0 до 8 байт данных
- поле CRC (CRC field) содержит 15-битную контрольную сумму сообщения, которая используется для обнаружения ошибок
- слот подтверждения (Acknowledgement Slot) (1 бит), каждый CAN-контроллер, который правильно принял сообщение посылает бит подтверждения в сеть.
 Узел, который послал сообщение слушает этот бит, и в случае если подтверждение не пришло, повторяет передачу. В случае приема слота подтверждения передающий узел может быть уверен лишь в том, что хотя бы один из узлов в сети правльно принял его сообщение.
Узел, который послал сообщение слушает этот бит, и в случае если подтверждение не пришло, повторяет передачу. В случае приема слота подтверждения передающий узел может быть уверен лишь в том, что хотя бы один из узлов в сети правльно принял его сообщение.
Remote Frame — это Data Frame без поля данных и с выставленным битом RTR (1 — рецессивные бит). Основное предназначение Remote кадра — это инициация одним из узлов сети передачи в сеть данных другим узлом. Такая схема позволяет уменьшить суммарный трафик сети. Однако, на практике Remote Frame сейчас используется редко (например, в DeviceNet Remote Frame вовсе не используется).
Error Frame — это сообщение которое явно нарушает формат солобщения CAN. Передача такого сообщения приводит к тому, что все узлы сети регистрируют ошибку формата CAN-кадра, и в свою очередь автоматически передают в сеть Error Frame. Результатом этого процесса является автоматическая повторная передача данных в сеть передающим узлом. Error Frame состоит из поля Error Flag, которое состоит из 6 бит одинакового значения (и таким образом Error frame нарушает проверку Bit Stuffing, см. ниже), и поля Error Delimiter, состоящее из 8 рецессивных битов. Error Delimiter дает возможность другим узлам сети обнаружив Error Frame послать в сеть свой Error Flag.
Результатом этого процесса является автоматическая повторная передача данных в сеть передающим узлом. Error Frame состоит из поля Error Flag, которое состоит из 6 бит одинакового значения (и таким образом Error frame нарушает проверку Bit Stuffing, см. ниже), и поля Error Delimiter, состоящее из 8 рецессивных битов. Error Delimiter дает возможность другим узлам сети обнаружив Error Frame послать в сеть свой Error Flag.
Overload Frame — повторяет структуру и логику работы Error кадра, с той разницей, что он используется перегруженным узлом, который в данный момент не может обработать поступающее сообщение, и поэтому просит при помощи Overload-кадра о повторной передаче данных. В настоящее время Overload-кадр практически не используется.
Контроль доступа к среде передачи (побитовый арбитраж).
Поле арбитража CAN-кадра используется в CAN для разрешения коллизий доступа к шине методом не деструктивного арбитража. Суть метода не деструктивного арбитража заключается в следующем. В случае, когда несколько контроллеров начинают одновременную передачу CAN кадра в сеть, каждый из них сравнивает, бит, который собирается передать на шину с битом, который пытается передать на шину конкурирующий контроллер. Если значения этих битов равны, оба контроллера передают следующий бит. И так происходит до тех пор, пока значения передаваемых битов не окажутся различными. Теперь контроллер, который передавал логический ноль (более приоритетный сигнал) будет продолжать передачу, а другой (другие) контроллер прервёт свою передачу до того времени, пока шина вновь не освободится. Конечно, если шина в данный момент занята, то контроллер не начнет передачу до момента её освобождения.
В случае, когда несколько контроллеров начинают одновременную передачу CAN кадра в сеть, каждый из них сравнивает, бит, который собирается передать на шину с битом, который пытается передать на шину конкурирующий контроллер. Если значения этих битов равны, оба контроллера передают следующий бит. И так происходит до тех пор, пока значения передаваемых битов не окажутся различными. Теперь контроллер, который передавал логический ноль (более приоритетный сигнал) будет продолжать передачу, а другой (другие) контроллер прервёт свою передачу до того времени, пока шина вновь не освободится. Конечно, если шина в данный момент занята, то контроллер не начнет передачу до момента её освобождения.
Методы обнаружения ошибок.
CAN протокол определяет пять способов обнаружения ошибок в сети:
- Bit monitoring
- Bit stuffing
- Frame check
- ACKnowledgement Check
- CRC Check
Bit monitoring — каждый узел во время передачи битов в сеть сравнивает значение передаваемого им бита со значением бита которое появляется на шине. Если эти значения не совпадают, то узел генерирует ошибку Bit Error. Естественно, что во время арбитража на шине (передача поля арбитража в шину) этот механизм проверки ошибок отключается.
Если эти значения не совпадают, то узел генерирует ошибку Bit Error. Естественно, что во время арбитража на шине (передача поля арбитража в шину) этот механизм проверки ошибок отключается.
Bit stuffing — когда узел передает последовательно в шину 5 бит с одинаковым значением, то он добавляет шестой бит с противоположным значением. Принимающие узлы этот дополнительный бит удаляют. Если узел обнаруживает на шине больше 5 последовательных бит с одинаковым значением, то он генерирует ошибку Stuff Error.
Frame Check — некоторые части CAN-сообщения имеют одинаковое значение во всех типах сообщений. Т.е. протокол CAN точно определяет какие уровни напряжения и когда должны появляться на шине. Если формат сообщений нарушается, то узлы генерируют ошибку Form Error.
ACKnowledgement Check — каждый узел получив правильное сообщение по сети посылает в сеть доминантный (0) бит. Если же этого не происходит, то передающий узел регистрирует ошибку Acknowledgement Error.
CRC Check — каждое сообщение CAN содержит CRC сумму, и каждый принимающий узел подсчитывает значение CRC для каждого полученного сообщения. Если подсчитанное значение CRC суммы, не совпадает со значением CRC в теле сообщения, принимающий узел генерирует ошибку CRC Error.
Механизм ограничения ошибок (Error confinement).
Каждый узел сети CAN, во время работы пытается обнаружить одну из пяти возможных ошибок. Если ошибка обнаружена, узел передает в сеть Error Frame, разрушая тем самым весь текущий трафик сети (передачу и прием текущего сообщения). Все остальные узлы обнаруживают Error Frame и принимают соответствующие действия (сбрасывают принятое сообщение). Кроме того, каждый узел ведет два счетчика ошибок: Transmit Error Counter (счетчик ошибок передачи) и Receive Error Counter (счетчик ошибок приема). Эти счетчики увеличиваются или уменьшаются в соответствие с несколькими правилами. Сами правила управления счетчиками ошибок достаточно сложны, но сводятся к простому принципу, ошибка передачи приводит к увеличению Transmit Error счетчика на 8, ошибка приема увеличивает счетчик Receive Error на 1, любая корректная передача/прием сообщения уменшают соответствующий счетчик на 1. Эти правила приводят к тому, что счетчик ошибок передачи передающего узла увеличивается быстрее, чем счетчик ошибок приема принимающих узлов. Это правило соответствует предположению о большой вероятности того, что источником ошибок является передающий узел.
Эти правила приводят к тому, что счетчик ошибок передачи передающего узла увеличивается быстрее, чем счетчик ошибок приема принимающих узлов. Это правило соответствует предположению о большой вероятности того, что источником ошибок является передающий узел.
Каждый узел CAN сети может находится в одном из трех состояний. Когда узел стартует он находится в состоянии Error Active. Когда, значение хотя бы одного из двух счетчиков ошибок превышает предел 127, узел переходит в состояние Error Passive. Когда значение хотя бы одного из двух счетчиков превышает предел 255, узел переходит в состояние Bus Off.
Узел находящийся в состоянии Error Active в случае обнаружения ошибки на шине передает в сеть Active Error Flags. Active Error Flags сотстоит из 6 доминантных бит, поэтому все узлы его регистрируют. Узел в состоянии Passive Error передает в сеть Passive Error Flags при обнаружении ошибки в сети. Passive Error Flags состоит из 6 рецессивных бит, поэтому остальные узлы сети его не замечают, и Passive Error Flags лишь приводит к увеличению Error счетчика узла. Узел в состоянии Bus Off ничего не передает в сеть (не только Error кадры, но вообще никакие другие).
Узел в состоянии Bus Off ничего не передает в сеть (не только Error кадры, но вообще никакие другие).
Адресация и протоколы высокого уровня
В CAN не существует явной адресации сообщений и узлов. Протокол CAN нигде не указывает что поле арбитража (Identification field + RTR) должно использоваться как идентификатор сообщения или узла. Таким образом, идентификаторы сообщений и адреса узлов могут находится в любом поле сообщения (в поле арбитража или в поле данных, или присутствовать и там, и там). Точно также протокол не запрещает использовать поле арбитража для передачи данных.
Утилизация поля арбитража и поля данных, и распределение адресов узлов, идентификаторов сообщений и приоритетов в сети является предметом рассмотрений так называемых протоколов высокого уровня (HLP — Higher Layer Protocols). Название HLP отражает тот факт, что протокол CAN описывает только два нижних уровня эталонной сетевой модели ISO/OSI, а остальные уровни описываются протоколами HLP.
 4. Логическая структура протокола CAN.
4. Логическая структура протокола CAN.Существует множество таких высокоуровневых протоколов. Наиболее распространенные из них это:
- DeviceNet
- CAL/CANopen
- SDS
- CanKingdom
Физичекий уровень протокола CAN
Физический уровень (Physical Layer) протокола CAN определяет сопротивление кабеля, уровень электрических сигналов в сети и т.п. Существует несколько физических уровней протокола CAN (ISO 11898, ISO 11519, SAE J2411).
В подавляющем большинстве случаев используется физический уровень CAN определенный в стандарте ISO 11898. ISO 11898 в качестве среды передачи определяет двухпроводную дифференциальную линию с импедансом (терминаторы) 120 Ом (допускается колебание импеданса в пределах от 108 Ом до 132 Ом. Физический уровень CAN реализован в специальных чипах — CAN приемо-передатчиках (transceivers), которые преобразуют обычные TTL уровни сигналов используемых CAN-контроллерами в уровни сигналов на шине CAN. Наиболее распространенный CAN приемо-передатчик — Phillips 82C250, который полностью соответствует стандарту ISO 11898.
Махимальная скорость сети CAN в соответствие с протоколом равна 1 Mbit/sec. При скорости в 1 Mbit/sec максимальная длина кабеля равна примерно 40 метрам. Ограничение на длину кабеля связано с конечной скоростью света и механизмом побитового арбитража (во время арбитража все узлы сети должны получать текущий бит передачи одновременно, те сигнал должен успеть распространится по всему кабелю за единичный отсчет времени в сети. Соотношение между скоростью передачи и максимальной длиной кабеля приведено в таблице:
| скорость передачи | максимальная длина сети |
| 1000 Кбит/сек | 40 метров |
| 500 Кбит/сек | 100 метров |
| 250 Кбит/сек | 200 метров |
| 125 Кбит/сек | 500 метров |
| 10 Кбит/сек | 6 километров |
Разъемы для сети CAN до сих пор НЕ СТАНДАРТИЗОВАНЫ. Каждый протокол высокого уровня обычно определяет свой тип разъемов для CAN-сети.
‹ Шина CAN Вверх Спецификация протокола CAN 2.0 ›
| Номер пьезы | Описание | ПДФ | |
| 1N4001S | КРЕМНИЕВЫЙ ВЫПРЯМИТЕЛЬ ОБЩЕГО НАЗНАЧЕНИЯ | Кингтроникс |
ПДФ |
| 1N4002S | КРЕМНИЕВЫЙ ВЫПРЯМИТЕЛЬ ОБЩЕГО НАЗНАЧЕНИЯ | Кингтроникс |
|
| 1N4003S | КРЕМНИЕВЫЙ ВЫПРЯМИТЕЛЬ ОБЩЕГО НАЗНАЧЕНИЯ | Кингтроникс |
ПДФ |
| 1N4004S | КРЕМНИЕВЫЙ ВЫПРЯМИТЕЛЬ ОБЩЕГО НАЗНАЧЕНИЯ | Кингтроникс |
ПДФ |
| 1N4005S | КРЕМНИЕВЫЙ ВЫПРЯМИТЕЛЬ ОБЩЕГО НАЗНАЧЕНИЯ | Кингтроникс |
ПДФ |
| 1N4006S | КРЕМНИЕВЫЙ ВЫПРЯМИТЕЛЬ ОБЩЕГО НАЗНАЧЕНИЯ | Кингтроникс |
ПДФ |
| 1N4007S | КРЕМНИЕВЫЙ ВЫПРЯМИТЕЛЬ ОБЩЕГО НАЗНАЧЕНИЯ | Кингтроникс |
ПДФ |
| 2N7002 | Юнисоник Текнолоджиз |
ПДФ | |
| 2N7002DW | ДВОЙНОЙ N-КАНАЛЬНЫЙ МОЩНЫЙ МОП-транзистор | Юнисоник Текнолоджиз |
ПДФ |
| 2N7002T | N-КАНАЛЬНЫЙ МОЩНЫЙ МОП-транзистор | Юнисоник Текнолоджиз |
ПДФ |
| 2N7002Z | N-КАНАЛЬНЫЙ МОЩНЫЙ МОП-транзистор | Юнисоник Текнолоджиз |
ПДФ |
| 2N7002ZDW | ДВОЙНОЙ N-КАНАЛЬНЫЙ МОП-транзистор | Юнисоник Текнолоджиз |
ПДФ |
| 2SC5242 | NPN Эпитаксиальный кремниевый транзистор | Фэирчайлд Полупроводник |
ПДФ |
| ААТ1185 | Высоковольтный понижающий контроллер | Скайворкс |
ПДФ |
|
Una ficha técnica, hoja técnica u hoja de datos (datasheet на английском языке), también ficha de características u hoja de características, es un documento que резюме el funcionamiento y otras caracteristicas de un componente (por ejemplo, un componente electronico) o subsistema por ejemplo, una fuente de alimentación) con el suficiente detalle para ser utilizado por un ingeniero de diseño y diseñar el componente en un sistema. |
 DataSheet.es является веб-страницей, которая функционирует как репозиторий руководств или hoja de datos de muchos de los productos más Populares,
allowiéndote verlos en linea o descargarlos en PDF.
DataSheet.es является веб-страницей, которая функционирует как репозиторий руководств или hoja de datos de muchos de los productos más Populares,
allowiéndote verlos en linea o descargarlos en PDF. 82C250_4341258.PDF Загрузить техническое описание — IC-ON-LINE
82C250_4341258.PDF Загрузить техническое описание — IC-ON-LINE
|
|
|
|||||||||||||||||||||||||||||||||
 /
12 Страница
/
12 Страница  com
com | Полнотекстовый поиск: Интерфейс контроллера CAN |
| Номер связанной детали | ||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||
| Связанное ключевое слово из системы полнотекстового поиска | ||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||
 Д.
Д. 
| Цена и наличие 82C250 от |
|
Все права защищены © IC-ON-LINE 2003 — 2022 |
| [Добавить закладку] [Контакты Нам] [Обмен ссылками] [Политика конфиденциальности] |
Сайты-зеркала: [www.
Похожие записи
|