Чем отличается непрерывный сигнал от дискретного. Каковы основные характеристики аналоговых и цифровых сигналов. Как происходит преобразование между непрерывными и дискретными сигналами. Где применяются разные типы сигналов.
Что такое непрерывный (аналоговый) сигнал
Непрерывный или аналоговый сигнал — это сигнал, который непрерывно изменяется во времени и может принимать любые значения в заданном диапазоне. Основные характеристики непрерывного сигнала:
- Плавное изменение значений во времени без разрывов
- Возможность принимать любые промежуточные значения в диапазоне
- Непрерывность как по времени, так и по амплитуде
- Бесконечное число возможных значений сигнала
Примерами непрерывных сигналов являются звуковые волны, изменение температуры, напряжение в электрической цепи. В природе большинство процессов носит непрерывный характер.
Особенности дискретного (цифрового) сигнала
Дискретный или цифровой сигнал — это сигнал, значения которого определены только в дискретные моменты времени. Ключевые свойства дискретного сигнала:
- Значения определены только в фиксированные моменты времени
- Между отсчетами значение сигнала не определено
- Конечное число возможных значений сигнала
- Обычно представляется в виде последовательности чисел
Дискретные сигналы широко используются в цифровой электронике и вычислительной технике. Любая информация в компьютерах представлена в виде дискретных цифровых сигналов.
Основные отличия непрерывного и дискретного сигналов
Рассмотрим ключевые различия между непрерывными и дискретными сигналами:
- Непрерывность — аналоговый сигнал непрерывен во времени, дискретный определен только в отдельные моменты времени.
- Число значений — у аналогового сигнала бесконечное число возможных значений, у дискретного — конечное.
- Представление — аналоговый сигнал представляется непрерывной функцией, дискретный — последовательностью чисел.
- Точность — аналоговый сигнал теоретически имеет бесконечную точность, дискретный ограничен разрядностью представления.
- Помехоустойчивость — дискретный сигнал более устойчив к помехам и искажениям при передаче.
Как происходит аналого-цифровое преобразование
Для преобразования непрерывного сигнала в дискретный используются аналого-цифровые преобразователи (АЦП). Процесс включает следующие этапы:
- Дискретизация — взятие отсчетов сигнала через равные промежутки времени
- Квантование — округление значений отсчетов до ближайших допустимых уровней
- Кодирование — представление квантованных значений в двоичном коде
При этом важно правильно выбрать частоту дискретизации и количество уровней квантования, чтобы минимизировать потери информации.
Области применения аналоговых и цифровых сигналов
Непрерывные аналоговые сигналы используются:
- В аналоговых системах связи (радио, проводная телефония)
- В аналоговой звукозаписи
- В аналоговом телевидении
- В измерительных приборах
Дискретные цифровые сигналы применяются:
- В цифровых системах связи (мобильная связь, интернет)
- В цифровой обработке сигналов
- В вычислительной технике
- В цифровом аудио и видео
Преимущества и недостатки разных типов сигналов
Непрерывные аналоговые сигналы имеют следующие достоинства:
- Простота генерации и обработки
- Отсутствие потерь при передаче исходного сигнала
- Низкая стоимость оборудования
Недостатки аналоговых сигналов:
- Высокая чувствительность к помехам и искажениям
- Сложность хранения без потерь
- Ограниченные возможности обработки
Преимущества дискретных цифровых сигналов:
- Высокая помехозащищенность
- Возможность сжатия информации
- Простота хранения и копирования
- Широкие возможности цифровой обработки
Основные недостатки цифровых сигналов:
- Потери информации при оцифровке аналогового сигнала
- Необходимость высокой частоты дискретизации
- Более сложное и дорогое оборудование
Методы дискретизации непрерывных сигналов
Существует несколько основных методов дискретизации непрерывных сигналов:
- Равномерная дискретизация — взятие отсчетов через равные промежутки времени. Наиболее распространенный метод.
- Неравномерная дискретизация — интервалы между отсчетами могут меняться. Применяется для сигналов с неравномерным спектром.
- Адаптивная дискретизация — частота отсчетов меняется в зависимости от скорости изменения сигнала.
- Случайная дискретизация — моменты взятия отсчетов выбираются случайным образом.
Выбор метода дискретизации зависит от характеристик исходного сигнала и требований к точности его представления.

Теорема Котельникова о дискретизации
Теорема Котельникова (в западной литературе — теорема Найквиста-Шеннона) устанавливает условия, при которых дискретный сигнал полностью представляет исходный непрерывный сигнал. Основные положения теоремы:
- Частота дискретизации должна быть как минимум в 2 раза выше максимальной частоты в спектре сигнала
- При соблюдении этого условия непрерывный сигнал может быть точно восстановлен из дискретных отсчетов
- Формула восстановления непрерывного сигнала из дискретных отсчетов
Теорема Котельникова лежит в основе цифровой обработки сигналов и широко применяется при проектировании систем связи.
Спектры непрерывных и дискретных сигналов
Спектр сигнала — это представление сигнала в частотной области. Рассмотрим особенности спектров разных типов сигналов:
Спектр непрерывного сигнала:
- Непрерывный во всем диапазоне частот
- Может быть ограниченным или неограниченным
- Описывается непрерывной функцией
Спектр дискретного сигнала:
- Периодический с периодом, равным частоте дискретизации
- Состоит из копий спектра исходного непрерывного сигнала
- Описывается дискретной функцией
При дискретизации непрерывного сигнала его спектр изменяется — возникает явление наложения спектров (aliasing). Для предотвращения искажений необходимо использовать фильтры нижних частот.

Квантование сигналов по уровню
Квантование — это процесс преобразования непрерывного множества значений сигнала в конечное число уровней. Основные характеристики квантования:
- Шаг квантования — минимальное расстояние между соседними уровнями
- Число уровней квантования — определяет разрядность цифрового представления
Существует равномерное и неравномерное квантование. При равномерном квантовании шаг постоянен, при неравномерном — может меняться. Выбор параметров квантования влияет на точность представления сигнала и объем данных.
Восстановление непрерывного сигнала из дискретного
Для восстановления непрерывного сигнала из дискретных отсчетов используются цифро-аналоговые преобразователи (ЦАП). Процесс включает следующие этапы:
- Формирование ступенчатого сигнала из дискретных отсчетов
- Фильтрация высокочастотных составляющих
- Интерполяция значений между отсчетами
Качество восстановления зависит от частоты дискретизации, разрядности квантования и характеристик фильтра. При соблюдении теоремы Котельникова возможно полное восстановление исходного сигнала.

Применение дискретных сигналов в цифровой связи
Дискретные сигналы широко используются в современных системах цифровой связи. Основные преимущества их применения:
- Высокая помехоустойчивость передачи
- Возможность эффективного кодирования и сжатия
- Простота регенерации сигнала
- Удобство коммутации цифровых потоков
Цифровые системы связи используют различные виды модуляции дискретных сигналов — амплитудную, частотную, фазовую. Это позволяет эффективно использовать частотный ресурс каналов связи.
Заключение
Непрерывные и дискретные сигналы имеют свои особенности и области применения. Понимание их свойств и методов преобразования необходимо для проектирования современных систем обработки информации и связи. Развитие цифровых технологий привело к широкому распространению дискретных сигналов, но и аналоговые сигналы продолжают играть важную роль во многих областях.
Чем отличается непрерывный сигнал от дискретного кратко
Что ты хочешь узнать?
Ответ
1.Непрерывный сигнал определен в каждый момент времени и принимает все значения в своей области значений. Дискретный сигнал определен либо только в определенные моменты времени (квантование по времени, решетчатая функция), либо его значение может принимать только определенные значения (квантование по уровню, ступенчатая функция).
3.
аудиоформаты без сжатия, такие как WAV, AIFF
аудиоформаты со сжатием без потерь(APE, FLAC)
аудиоформаты со сжатием с потерями(MP3)
4. Для того, чтобы закодировать видеоинформацию, следует пойти 3 этапа.
Первый этап – это подготовка видеоданных;
Второй этап – это сжатие видеоданных;
Третий этап – это квантование.
5. Видеофайл MPEG-4, Видеофайл Windows Media, файл Windows Video, файл Adobe Flash Media
История появления термина
Появление термина, обозначающего такой способ передачи данных, тесно связано с такими сферами, как вычислительная техника, телефония и звукозаписывающая индустрия, электрические измерения.
Вычислительная техника
В 40-х годах создаются первые вычислительные системы, предназначенные для сбора и обработки цифровой информации. В начале 80-х годов с появлением новых моделей компьютеров на базе процессоров Intel возможности вычислительной техники расширились. Именно в этот период появляется данный термин.
В начале 80-х годов с появлением новых моделей компьютеров на базе процессоров Intel возможности вычислительной техники расширились. Именно в этот период появляется данный термин.
Звукозапись и телефония
Понятие непрерывного способа передачи данных изначально связано с телефонией. Непрерывные колебания поступают на динамик устройства, становятся электрическим аналогом, затем преобразуются в сигнал, подобный голосу.
Электрические измерения
Непрерывный поток воспроизводится приемным устройством пропорционально таким электрическим параметрам, как напряжение, сила тока. Именно с началом измерения указанных выше электрических величин связывают появление этого термина.
Общая информация
Энергия потока
Так как аналоговый сигнал – это непрерывный поток данных, то энергия его бесконечна. Однако в качестве значения данной характеристики обычно используют усредненную для определенного промежутка времени величину, так, к примеру, переменный электрический ток в телефонной сети, отвечающий за передачу голоса, имеет среднее напряжение 60 В.
Взаимное преобразование различных по природе потоков
Непрерывный поток данных преобразуется в дискретный (прерывистый). Достаточно воспользоваться импульсным блоком питания, который сформирует входное напряжение в виде дискретных ультразвуковых пачек. Преобразование проводится программой либо технически через микросхемы.
Отличия дискретного и цифрового сигналов
Один из способов передачи данных, описываемых в данной статье, – дискретный, имеющий сходные характеристики с аналоговым, но отличающийся от него тем, что он является прерывистым.
По сравнению с дискретным и аналоговым, цифровой сигнал, наоборот, характеризуется конкретными параметрами:
- Строго определённой своими характеристиками длительностью;
- Ярко выраженной амплитудой;
- Наличием двух состояний: «0» либо «1».
- Формированием из битов машинных слов, необходимых для дальнейшей обработки информации, ее представлении в доступном и понятном виде для пользователя.

Благодаря этим особенностям, цифровая передача и хранение информации в последнее время находят очень широкое применение в различных отраслях техники, электроники, связи.
Важно! Самое основное, чем отличается аналоговая информация от дискретной, – это прерывистость передачи последней при помощи соответствующего потока данных. Однако, несмотря на данное различие, дискретная информация не является цифровой, так как ее характеристики в процессе существования могут обладать как ограниченным, так и неограниченным диапазоном значений.
Виды сигналов
В зависимости от изменения характеристик во времени, все потоки подразделяются на следующие виды:
- Аналоговые – непрерывные, имеющие большое количество значений;
- Дискретные – прерывистые, с большим количеством значений;
- Цифровые – прерывистые, имеющие 2 четко обозначенных основных значения.
Также, в зависимости от среды передачи и способа формирования, они бывают электрические, звуковые, оптические.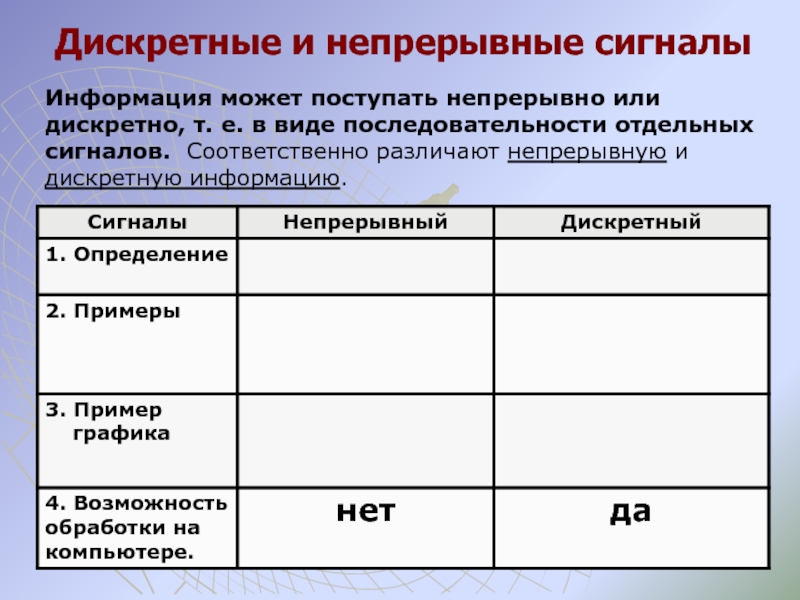
Для чего обрабатывается сигнал
Чтобы получить данные, содержащиеся в описанных выше потоках, их обрабатывают через процессы усиления, фильтрации, модуляции и демодуляции. Лишь после этого они будут представлены в понятном для пользователя виде и использованы по назначению.
Создание и формирование
Для создания непрерывного потока используют такое специальное оборудование, как генераторы. Собирают их, используя различные транзисторы (полевые и биполярные), трансформаторы.
Динамический диапазон
Важной характеристикой любой системы динамических измерений считается ее динамический диапазон. Четкого определения данного параметра для сигнала пока не существует, поэтому принято считать, что это соотношение наибольшего и наименьшего его значений, измеренных системой в определенный промежуток времени.
Для каждого потока важно, чтобы его динамический диапазон максимально соответствовал аналогичной характеристике системы либо устройства, предназначенного для преобразования, передачи и хранения его величин. От правильного подбора зависит, насколько точно будет передана и преобразована информация любого потока.
От правильного подбора зависит, насколько точно будет передана и преобразована информация любого потока.
Аналоговый сигнал
Такой вид потока данных непрерывен во времени, его определение возможно в любой временной промежуток.
Цифровой сигнал
Такой поток представлен последовательностью конкретных цифровых значений, как правило, двух, которые принимают за логические «0» и «1» или «true» и «false».
Применение цифрового сигнала
Цифровой поток наиболее применим в современной электронике, при двоичной системе шифрования и кодирования данных.
Дискретный сигнал
В отличие от непрерывного, дискретный способ передачи данных имеет следующие особенности:
- Может характеризоваться постоянным значением параметра, изменятся только по времени;
- Изменяется уровень величины, но во времени остается постоянным;
- Меняется как по значению величины, так и по временному параметру.
Сравнение цифрового и аналогового сигналов
Широко применяемые в современном мире аналоговый и цифровой сигналы имеют свои преимущества и недостатки.
К основным плюсам непрерывного потока информации относятся:
- Простота формирования;
- Небольшая стоимость оборудования для его получения и поддержания.
Недостатки такого вида передачи данных:
- Содержание большого количества лишней информации, которую необходимо фильтровать;
- Низкая помехоустойчивость, что сказывается на качестве воспроизводимой информации;
- В передачу такого сигнала возможно нежелательное вмешательство с целью похищения передаваемой информации.
Прерывистый способ передачи данных имеет следующие преимущества:
- Небольшое количество значений, помехоустойчивость;
- Простота расшифровки на принимающем оборудовании;
- Возможность кодировки больших объемов данных при их хранении и передаче на большие расстояния.
У прерывистого способа передачи и хранения информации имеется один серьезный недостаток – при серьезном уровне помех может произойти обрыв, первоначальный вид потока данных не сохранится. Для восстановления его параметров на момент обрыва приходится предусматривать дополнительные функции.
Для восстановления его параметров на момент обрыва приходится предусматривать дополнительные функции.
Аналоговый и цифровой сигналы и цифро-аналоговое преобразование
Современные системы, устройства позволяют проводить процессы взаимных преобразований. Так, при аналого-цифровом преобразовании (АЦП) проходит квантование аналогового потока данных в цифровой, после чего информация готова для передачи через цифровые каналы.
При процессе ЦАП цифровые коды на входе, наоборот, преобразуются в эквивалентный выходной аналоговый поток (ток, напряжение). Преобразователи широко используются для формирования сигналов в системах управления, аудио,-и видеоаппаратуре.
Таким образом, сигнал аналоговый – это хоть и уже утрачивающий свою актуальность, но достаточно широко применимый способ передачи данных. Хотя аналоговый сигнал и называют пережитком прошлого, его роль в современной телекоммуникационной технике, радиопередаче и телевещании еще до сих пор очень существенна.
Видео
Сигнал — это любая переменная содержащая какой-либо вид информации. Причем эту информацию можно передавать на расстояние, переносить на устройства хранения, выводить на экран и через динамики или совершать с ней подобные действия. Существующие аналоговый и цифровой кардинально отличаются природой происхождения, способом передачи и хранения.
p, blockquote 1,0,0,0,0 –>
p, blockquote 2,0,0,0,0 –>
Аналоговый сигнал
Это природный тип сигналов окружает нас повсеместно и постоянно. Звук, изображение, тактильные ощущения, запах, вкус и команды мозга. Все возникающие, во Вселенной без участия человека, сигналы являются аналоговыми.
p, blockquote 3,0,0,0,0 –>
В электронике, электротехнике и системах связи аналоговую передачу данных применяют со времени изобретения электричества. Характерной особенностью является непрерывность и плавность изменения параметров. Графически сеанс аналоговой связи можно описать как непрерывную кривую, соответствующую величине электрического напряжения в определённый момент времени. Линия изменяется плавно, разрывы возникают только при обрыве связи. В природе и электронике аналоговые данные генерируются и распространяются непрерывно. Отсутствие непрерывного сигнала означает тишину или черный экран.
Графически сеанс аналоговой связи можно описать как непрерывную кривую, соответствующую величине электрического напряжения в определённый момент времени. Линия изменяется плавно, разрывы возникают только при обрыве связи. В природе и электронике аналоговые данные генерируются и распространяются непрерывно. Отсутствие непрерывного сигнала означает тишину или черный экран.
p, blockquote 4,0,0,0,0 –>
В непрерывных системах связи аналогом звука, изображения и любых других данных является электрические или электромагнитные импульсы. Например, громкость и тембр голоса передаются от микрофона на динамик посредством электрического сигнала. Громкость зависит от величины, а тембр от частоты напряжения. Поэтому при голосовой связи сначала напряжение становится аналогом звука, а потом звук аналогом напряжения. Таким же образом происходит передача любых данных в аналоговых системах связи.
p, blockquote 5,0,0,0,0 –>
Что такое дискретный сигнал
В цифровой системе хранения и передачи данных, отсутствие сигнала, также является формой обмена информацией. В какой-то момент времени он равен нулю, в другой принимает какое-либо значение. Поэтому дискретным называют сигнал прерывный, отсюда и название discretus или разделённый. Аналоговые данные разбиваются на отдельные блоки, обрабатываются и передаются в виде цифрового кода.
В какой-то момент времени он равен нулю, в другой принимает какое-либо значение. Поэтому дискретным называют сигнал прерывный, отсюда и название discretus или разделённый. Аналоговые данные разбиваются на отдельные блоки, обрабатываются и передаются в виде цифрового кода.
p, blockquote 6,0,0,0,0 –>
p, blockquote 7,0,0,0,0 –>
Дискретность не подразумевает разрыв связи. В цифровых системах широко используется двоичная система обработки и обмена информацией. Двоичная подразумевает кодировку данных с помощью единицы и нулей. В доли секунды сигнал прерывисто принимает значение 1 или 0. Вместо непрерывной кривой имеем отдельные дискретные значения. Определенный набор нулей и единичек уже несёт в себе какую либо информацию. Примитивный набор это бит или двоичный разряд. Сам по себе он ничего не значит. Данные могут кодироваться только при объединении восьми битов в следующую по сложности комбинацию – байт. Чем больше объединённых байтов, тем больше и точнее можно описать передаваемую информацию.
p, blockquote 8,0,1,0,0 –>
На качество генерируемых данных влияет не только количество объединённых битов, но и скорость передачи. Непрерывная аналоговая кривая должна быть разбита на как много больше мини участков прерывного сигнала. Полученный таким образом звук и цвет будут соответствовать оригиналу. Качественный дискретный сигнал формирует точную копию аналогового. Например, звуковая дорожка MP3 закодированная со скоростью 320 000 бит в секунду (320 kbps) значительно лучше кодированной в 128 kbps. Дорожки скоростью меньше 128 слушать вообще невозможно.
p, blockquote 9,0,0,0,0 –>
Чем отличается непрерывный сигнал от дискретного
На первый взгляд отличия в сигналах можно не различить. Оба передаются в виде электрических импульсов по проводам или электромагнитными волнами в эфире. Преобразовываются в звук и изображение, выводятся на динамики и экран. Но разница существенна. Отличие аналогового сигнала от цифрового обусловлено особенностями обработки и передачи данных.
p, blockquote 10,0,0,0,0 –>
Аналоговые данные не кодируются и не шифруются, просто отображаются в электрические или электромагнитные импульсы. Приёмник преобразовывает импульсы в полном соответствии с полученным сигналом. Передаваемый и принимаемый импульс многогранен и характеризуются постоянным плавным изменением с течением времени. Величина и частота определяют параметры информации. Примером может быть соответствие определённого цвета экрана заданному напряжению. С течением времени цвета плавно меняются следуя изменению напряжения.
Казалось бы, природное происхождение, простота генерации, передачи и приёма благоприятствуют использованию аналогового сигнала. Но в дело вмешиваются электрические и электромагнитные помехи. Это могут быть электромагнитные наводки от электрических сетей, работающих механизмов, рельеф местности, грозы, бури на солнце, шумы создаваемые работой передающего и принимающего оборудования, прочие. Они изменяют плавную кривую. На приёмник информация поступает с изменениями. Шипение, хрипы и искаженное изображение обычная история для аналоговой связи.
На приёмник информация поступает с изменениями. Шипение, хрипы и искаженное изображение обычная история для аналоговой связи.
p, blockquote 12,0,0,0,0 –>
Цифровая технология использует совсем иной принцип передачи. Аналоговые данные сначала кодируются и только потом передаются. Кодировка заключается в описании непрерывной кривой аналоговой информации. В каждый конкретный момент времени, передаваемый импульс имеет значение единицы или нуля, и определенная последовательность битов отображает всю полноту оригинальной картинки или звука.
Дискретный сигнал как азбука Морзе, только вместо точек и тире — чёткие биты. Ничего более, шумы и помехи им не мешают. Цифровой информации главное дойти до цели. Цифры без примесей передадут данные и без изменений перевоплотятся в звук и цвет. Но слабый сигнал может не донести полную картину. Как пример — пропадание слов или изображения полностью. Поэтому сотовые передатчики, устанавливают как можно ближе друг от друга, также используют повторители.
p, blockquote 14,0,0,0,0 –>
p, blockquote 15,0,0,0,0 –>
Примером непрерывных и дискретных сигналов могут служить старая проводная и новая сотовая связь. Через старые АТС иногда невозможно было разговаривать с соседним домом. Шумы и плохое усиление сигнала мешали слышать друг друга. Что бы вести полноценную беседу, приходилось громко кричать самому и прислушиваться к собеседнику. Другое дело сотовая связь основанная на цифровой технологии. Звук закодирован и хорошо передаётся на далёкие расстояния. Отчетливо слышно собеседника даже с другого континента.
p, blockquote 16,1,0,0,0 –>
Оба вида связи не лишены недостатков, а ключевыми отличиями являются:
p, blockquote 17,0,0,0,0 –>
- Аналоговый подвержен помехам и поступает с искажениями. В то время как цифровой доходит полностью без искажений или отсутствует вовсе.
- Принять или перехватить аналоговое вещание может любой приёмник такого принципа.
 Дискретная передача адресована конкретному адресату, кодируется и мало доступна к перехвату.
Дискретная передача адресована конкретному адресату, кодируется и мало доступна к перехвату. - Объём передаваемых данных у аналоговой связи конечен, поэтому она практически исчерпала себя в передаче теле сигнала. Напротив с развитием технологии преобразования аналоговой информации в цифровой код растут объемы и качество трансляции. Например, главным отличием цифрового от аналогового телевидения является превосходное качество изображения.
Цифровая технология выигрывает по всем показателям. Споры идут только среди любителей музыки. Многие меломаны и звукорежиссеры утверждают, что могут различить аналоговый оригинал и цифровую копию. Однако большинство слушателей этого сделать не в состоянии. Да и с развитием цифровых систем аналоговые данные кодируются точнее. Оригинальное звучание и цифровая копия делаются практически неразличимым.
p, blockquote 18,0,0,0,0 –>
Как аналоговый сигнал преобразуется в цифровой и наоборот
Первой в цифровую форму преобразовали математическую, физическую и компьютерную информацию.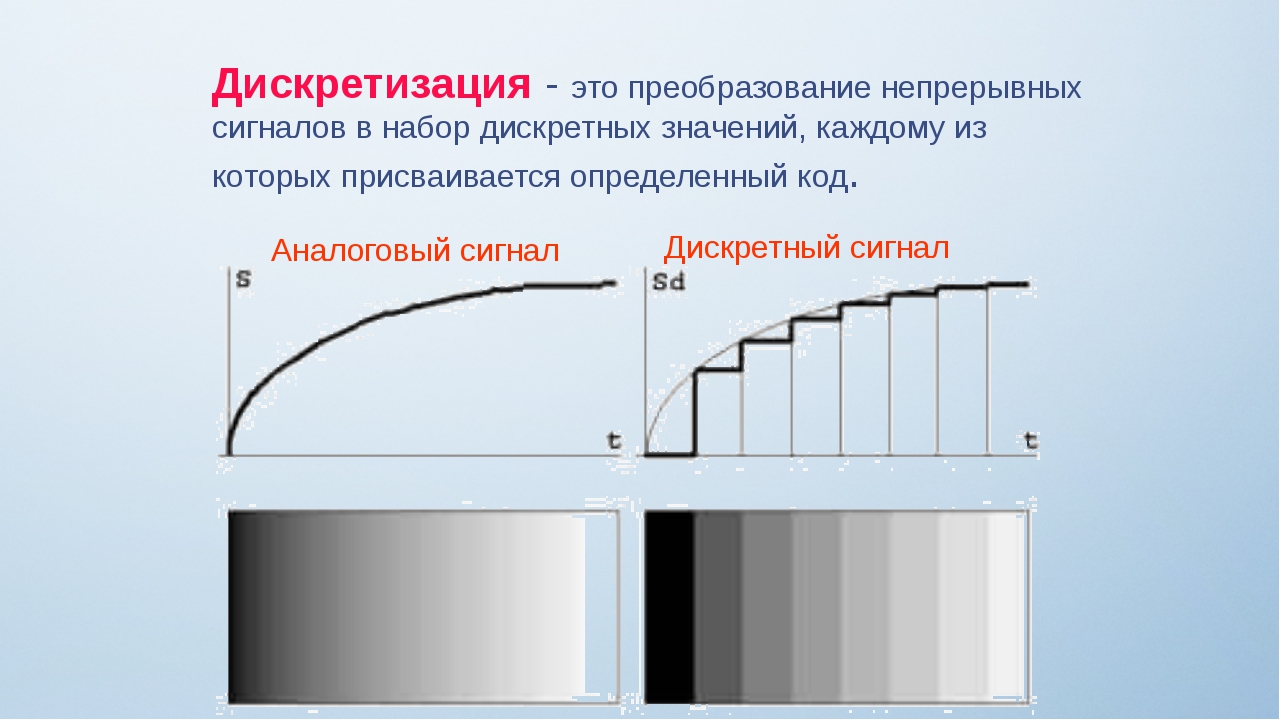 Описать формулы и расчеты не составило труда. А вот для преображения аналоговой действительности в цифровые массивы уже потребовались специальные устройства. Ими стали аналого-цифровые преобразователи или сокращенно АЦП. Они предназначены для преобразования различных физических величин в цифровые коды. Обратное действие совершают устройства ЦАП.
Описать формулы и расчеты не составило труда. А вот для преображения аналоговой действительности в цифровые массивы уже потребовались специальные устройства. Ими стали аналого-цифровые преобразователи или сокращенно АЦП. Они предназначены для преобразования различных физических величин в цифровые коды. Обратное действие совершают устройства ЦАП.
p, blockquote 19,0,0,0,0 –>
Любые цифровые передатчики и приёмники оснащены такими преобразователями. Например, сотовому телефону, поступивший звук необходимо обработать и передать в оцифрованном виде. В то же время необходимо принять от другого абонента код, преобразовать и передать напряжение на динамик. Так же и с изображением на смартфонах и в телевизорах. В любом случае первоначальной информацией выступает напряжение.
p, blockquote 20,0,0,0,0 –>
p, blockquote 21,0,0,0,0 –>
Существует много видов АЦП, но самыми распространёнными являются следующие:
p, blockquote 22,0,0,0,0 –>
- параллельного преобразования;
- последовательного приближения;
- дельта-сигма, с балансировкой заряда.
Преобразования в АЦП понятийно связаны с измерением и сравнением. Кодировка, это процесс сравнения полученных от источника данных с эталоном. То есть полученная аналоговая величина сравнивается с эталонной (с заданным напряжением). Эталоном выступает информация о конкретном цвете, звуке и т.п. Она соответствует заложенным в устройство представлениям о преобразуемом сигнале. Потом данные эталонной величины кодируются для передачи. Во время аналого-цифровой обработки физических превращений сигнала не происходит. С аналогового делается цифровой матрица (модель).
p, blockquote 23,0,0,0,0 –>
Упрощенно работу любого АЦП можно представить так:
p, blockquote 24,0,0,1,0 –>
- Измерение через определенные интервалы времени амплитуды напряжения.
- Сравнение с эталоном и формирование данных.
- Отгрузка оцифрованных сведений об изменениях амплитуды на передатчик.
Качество передаваемой информации зависит от двух параметров — точности и частоты измерений. Чем точнее измеряется и зашифровывается входящее напряжение, тем качественней передаваемая информация. Поэтому, имеет большое значение, сколько бит может зашифровать преобразователь. Чем плотнее информационный поток, тем точней передача данных. Это выражается в красках экрана, контрастности картинки и чистоте звука. Следующим важным показателем является дискретизация, то есть частота измерений. Чем чаще, тем меньше провалов в измерениях и необходимости сглаживания. В совокупности, чем чаще и точнее преобразователь может измерять и обрабатывать полученное напряжение, тем он лучше.
Чем точнее измеряется и зашифровывается входящее напряжение, тем качественней передаваемая информация. Поэтому, имеет большое значение, сколько бит может зашифровать преобразователь. Чем плотнее информационный поток, тем точней передача данных. Это выражается в красках экрана, контрастности картинки и чистоте звука. Следующим важным показателем является дискретизация, то есть частота измерений. Чем чаще, тем меньше провалов в измерениях и необходимости сглаживания. В совокупности, чем чаще и точнее преобразователь может измерять и обрабатывать полученное напряжение, тем он лучше.
p, blockquote 25,0,0,0,0 –>
Как выглядят спектры аналогового и дискретного сигнала
Изображение сигналов можно представить как две функции. На рисунке наглядно представлено, чем отличается непрерывный сигнал от дискретного. Напряжение исходного изменяется плавно, обработанного прерывисто. Спектр дискретного периодически ступенчато совпадает с непрерывным.
p, blockquote 26,0,0,0,0 –>
p, blockquote 27,0,0,0,0 –>
Изменения дискретного происходят резко, через определённый период времени. Уровень в цифровой системе зашифровывается и любую величину напряжения описывают двоичным кодом. От частоты измерений зависит сглаженность преобразования и оригинальность передаваемых данных. Чем точнее описан уровень сигнала и чем чаще проводится и обрабатывается измерение, тем точнее совпадает спектр начального и переданного сигналов.
p, blockquote 28,0,0,0,0 –>
p, blockquote 29,0,0,0,0 –>
Какие системы связи используют цифровой сигнал а какие аналоговый
Несмотря на архаичность аналоговая технология ещё используется для телефонной и радио связи. Многие проводные сети до сих пор остаются аналоговыми. В основном это традиционные телефонные линии местных операторов. Но, для магистральной передачи данных связи уже повсеместно используют цифровые каналы. Так же аналоговая технология применяется в простых и дешёвых переносных радиостанциях.
p, blockquote 30,0,0,0,0 –>
Во всех вновь создаваемых системах используют цифровую технологию обработки сигнала. Это оптоволоконные и проводные линии, сигнализация и телеметрия, военная и гражданская промышленная связь. И конечно же на цифровое вещание переходит телевидение. Аналоговый способ передачи данных исчерпал себя. На смену пришла новая высококачественная и защищенная связь.
p, blockquote 31,0,0,0,0 –>
Список книг помогающих разобраться в аналоговых и цифровых сигналах
Более подробно изучить и сравнить принципы обработки и передачи данных можно прочитав следующую литературу:
p, blockquote 32,0,0,0,0 –>
- Сато Ю. Обработка сигналов. Первое знакомство. / Пер. с яп.; под ред. Ёсифуми Амэмия. — М: Изд-кий дом «Додэка-XXI», 2002. Книга даёт основы знаний о способах ЦОС. Адресована радиолюбителям, студентам и школьникам, только начинающим изучение систем передачи данных.
- Введение в цифровую фильтрацию /под ред. Р. Богнера и А. Константинидиса; перевод с англ. — М: Изд-во «Мир», 1977. В этой книге популярно и доступно изложена информация о различных системах обработки данных. Сравниваются аналоговая и цифровая системы, описаны плюсы и минусы.
- Основы цифровой обработки сигналов: Курс лекций /Авторы: А.И. Солонина, Д.А. Улахович, С.М. Арбузов, Е.Б. Соловьев, И.И. Гук. — СПб: Изд-во «БХВ-Петербург», 2005. Книга написана по курсу лекций для студентов ГУТ им. Бонч-Бруевича. Изложены теоретические основы обработки данных, описаны дискретные и цифровые системы разных способов преобразования. Предназначена для изучения в вузах и повышения квалификации специалистов.
- Сергиенко А.Б. Цифровая обработка сигналов (второе издание) — СПб: Изд-во «Питер», 2006. Электронный учебно-методический комплекс по дисциплине «Цифровая обработка сигналов». Представлены курс лекций, лабораторный практикум и методические рекомендации по самостоятельной работе. Предназначена для преподавателей и самостоятельного изучения для студентов уровня подготовки бакалавр.
- Лайонс Р. Цифровая обработка сигналов. 2-е изд. Пер. с англ. – М.: ООО «Бином-Пресс», 2006. Книга представляет подробную информацию о ЦОС. Написана понятным языком и снабжена большим количеством иллюстрации. Одна из самых простых и понятных книг на русском языке.
p, blockquote 33,0,0,0,1 –>
Старая добрая аналоговая связь быстро сдаёт позиции. Несмотря на модернизацию и улучшения, возможность обмена данными достигла предела. К тому же, остались старые болезни – искажения и шумы. В то же время цифровая связь лишена этих недостатков, и передаёт большие объёмы информации быстро, качественно, без ошибок.
1.3 Сигналы непрерывные и дискретные. Преобразование сигналов.
Информация (сообщения и сигналы) может существовать в двух формах: непрерывной и дискретной.
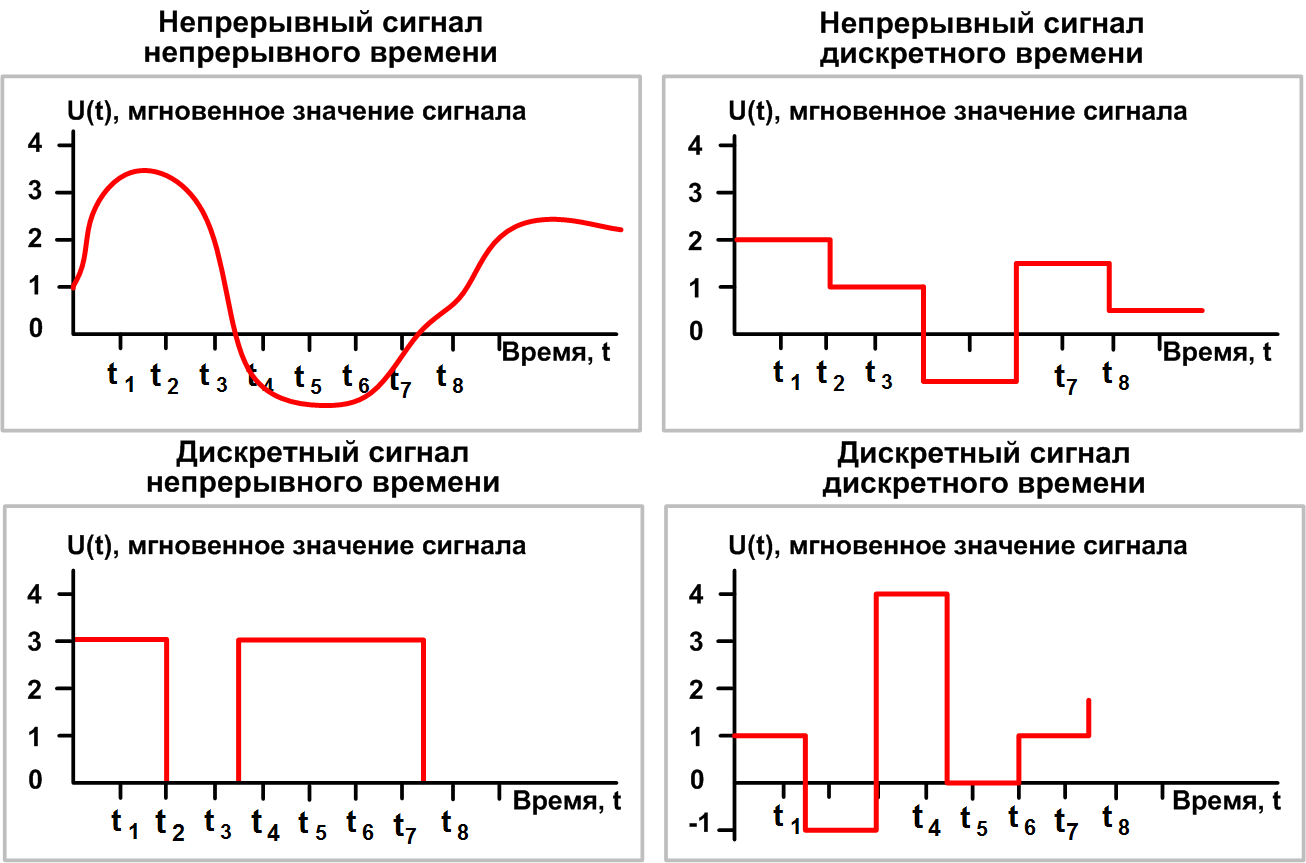
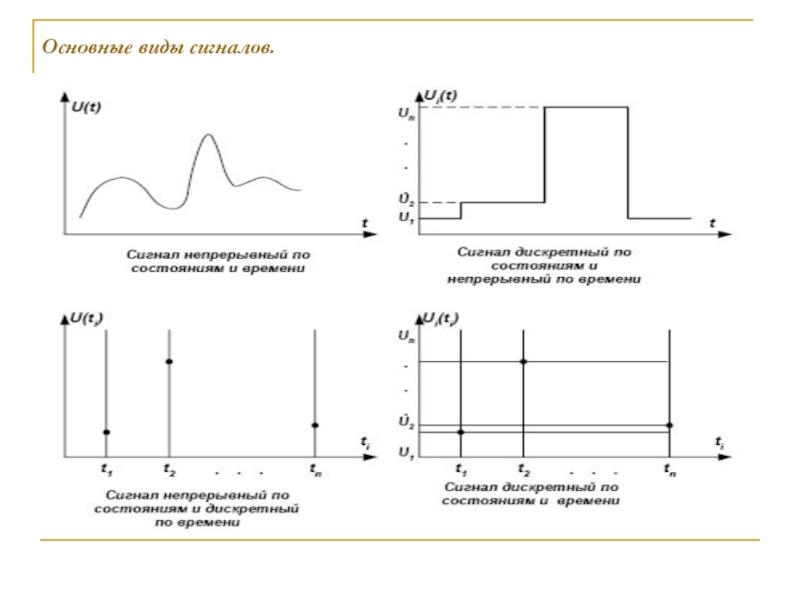
В большинстве случаев информация о протекании того или иного физического процесса вырабатывается соответствующими датчиками в виде сигналов, непрерывно изменяющихся во времени. Такой сигнал можно представить в виде непрерывной функции Х(t) непрерывного аргументаt– функции, которая может принимать любые вещественные значения в интервале (Xmin,Xmax) для любых значений аргументаtв интервале (0, Т) (рис. 1.10а). Множество значений непрерывной функции бесконечно.
Дискретные сообщения и сигналы состоят из конечного множества элементов, поступающих последовательно во времени. Набор элементов (символов) составляет алфавит источника дискретной информации. Обычно элементами дискретных сигналов являются последовательности чисел.
Для передачи информации по каналу связи и ее дальнейшей обработки средствами вычислительной техники непрерывный сигнал преобразуют в дискретный. Это преобразование осуществляется с помощью специальных устройств – преобразователей непрерывных сигналов и может быть выполнено дискретизацией во времени, квантованием по уровню или одновременно дискретизацией во времени и квантованием по уровню. При этом соответственно возможны три разновидности сигналов.
Дискретизация во временисостоит в преобразовании непрерывного сигнала Х(t) непрерывного аргументаt(рис. 1.10а) в непрерывный сигнал Х(ti) дискретного аргументаtiс шагом дискретизации ∆t(рис. 1.10б). Сигнала Х(ti) может принимать любые значения в интервале (Xmin,Xmax), но лишь на дискретном множестве значений аргументаti(t1,t2, …,tк) в интервале (0, Т). Какой бы малый шаг дискретизации не выбирался, множество значений дискретной функции будет конечно (ограничено). Примером такого сигнала может быть последовательность импульсов, модулированных по амплитуде. Рассмотренная дискретизации является равномерной, т.к. длительность шага дискретизации ∆ti=constна всем интервале (0, Т). Дискретизация может быть и неравномерной, если длительность шага ∆tiразлична (∆ti=var). Методы изменения шага ∆tiмогут быть адаптивными, когда он изменяется в зависимости от текущего изменения параметров сигнала, и программируемыми, когда он изменяется в соответствии с заранее установленной программой или оператором, на основе анализа поступающей информации. Очевидно, что каждый вид дискретизации имеет свои преимущества и недостатки. Все же в основном, применяется равномерная дискретизация, так как алгоритмы и аппаратура для ее реализации существенно проще. Однако очевидно, что при этом в случае медленно изменяющихся сигналов возможны «лишние» отсчеты, т.е. избыточность информации.
Квантование по уровнюсостоит в преобразовании непрерывных значений сигнала Х(ti) в дискретные значения. При этом образуется дискретный сигнал непрерывного аргумента; соседние значения сигнала различаются на элементарную величину ∆Х – квант (рис. 1.10в). Значения, которые может принимать сигнал Х(t), образуют дискретный ряд заранее заданных чисел Х1, Х2,…Хкили уровней 1, 2, 3, 4 и т.д.; значение аргументаtможет быть любым в интервале (0,Т). Примером такого сигнала может быть сигнал на выходе проволочного потенциометра, выходное напряжение которого квантуется за счет скачков сопротивления при перемещении движка с витка на виток. Можно отметить, что квантование по уровню может быть и неравномерным, если ∆Х=var. В основном, используется равномерное квантование — ∆Х=const.
С
Преобразование непрерывного сигнала в дискретный
овместное применение операции дискретизации во времени и квантования по уровнюпозволяет преобразовать непрерывный сигнал Х(t) в дискретный по координатам Х иt(рис. 1.10г). При этом образуется дискретный сигнал дискретного аргумента. Значения сигнала Х(t) и аргументаtобразуют дискретные ряды чисел Х1, Х2, …Хкиt1,t2, …tк, заполняющие интервалы (Хmin,Хmax) и (0,Т) соответственно.Первые две из рассмотренных разновидностей принадлежат дискретно-непрерывным сигналам, а третья – дискретному сигналу. Последний называется также цифровым, так как дискретные значения сигнала обычно представляются в цифровой форме.
Рассмотрим некоторые вопросы, связанные с точностью представления непрерывных сигналов Х(t) в результате дискретизации во времени и квантования по уровню.
В результате дискретизации во времени исходный непрерывный сигнал Х(t) представляется конечной последовательностью отдельных значений Х(ti), измеренных с шагом дискретизации ∆t=ti-ti-1. По значениям Х(ti) можно восстановить исходный сигнал Х(t) с некоторой погрешностью. Функцию Х(t), полученную в результате восстановления (интерполяции) по значениям Х(ti), называют воспроизводящей. При дискретизации возникает вопрос о точности преобразования, которая очевидно зависит от частоты отсчетов функцииfk=1/∆ti, т.е. от выбранного шага дискретизации ∆ti. С одной стороны, очевидно, что с уменьшением (увеличением) ∆tiточность преобразования будет расти (уменьшаться) за счет увеличения (уменьшения) количества отсчетов. С другой стороны, очевидно, что нет смысла стремиться всегда брать отсчеты как можно чаще, независимо от вида сигнала Х(t), так как в случае медленно изменяющегося сигнала Х(t) два соседних значения Х(ti) и Х(ti+1) могут быть настолько связаны (коррелированны) между собой, что по одному из них Х(ti) можно прогнозировать другое Х(ti+1), т.е. никакой новой информации о сигнале при его последующем восстановлении по отсчетам это не дает. Проблема обеспечении точности дискретизации может быть сформулирована следующим образом: с каким максимальным интервалом необходимо брать отсчеты значений сигнала Х(ti), чтобы не пропустить существенных его изменений или, другими словами, какое минимальное количество отсчетов необходимо брать для обеспечения заданной точности воспроизведения сигнала Х(t). От этого, в конечном счете, зависит количество информации, которую надо хранить и преобразовывать в вычислительном устройстве.
Возможны различные пути решения указанной проблемы.
В общем виде задача о представлении некоторого сигнала, являющегося непрерывной функцией времени, в виде конечного числа значений, взятых для дискретных значений времени, решена В.А. Котельниковым. В двух теоремах В.А. Котельников применительно к системе передачи сообщений по линии связи определил, как следует выбрать частоту дискретизации, обеспечивающую по полученным дискретным данным последующее воспроизведение исходного сигнала с заданной точностью.
Теорема 1. Любую функцию Х(t), имеющую спектр частот от 0 доfm, можно представить суммой функцииsinx/x, т.е. рядом:
, (1.51)
где K– целое число,
– отсчеты мгновенных значений функции Х(t) с шагом дискретизации ∆t,
ωm= 2πfm,fm– максимальная частота в спектре частот сигнала Х(t), Гц
ωm– круговая частота.
Из этой теоремы может быть сделан и обратный вывод: любая функция, представленная рядом Котельникова (1.51), имеет спектр, состоящий из частот от 0 до fm.
Теорема 2. Любая функция Х(t), содержащая частоты от 0 доfm, полностью определяется дискретными значениями этой функции, следующими друг за другом с частотой 2fm, т.е. через интервалсек. Таким образом, передачу непрерывного сигнала Х(t) с ограниченным спектром частот, поступающего от какого-либо датчика, можно свести к передаче последовательности дискретных чисел – значений этого сигнала, взятых через интервал времени 1/2fm; число этих значений равно 2fm. Через полученные значения ординат, при обработке результатов измерений, можно провести единственным способом воспроизводящую непрерывную функцию. Поэтому, проще говоря, нет смысла брать отсчеты чаще, чем интервал 1/2fm, так как никакой новой информации о функции при ее последующем восстановлении по отсчетам это не дает. Следует подчеркнуть, что сказанное справедливо только в том случае, если в получаемой информации действительно отсутствует частоты вышеfm.
Теоремы В.А. Котельникова, являющиеся основой современной теории передачи сообщений, очень удобны для исследования всевозможных линий связи, вследствие того, что для этих линий известны частотные характеристики, а спектр передаваемых сигналов ограничен. Другое дело – реальные сигналы, имеющие конечную длительность Т. Для их точного представления, в отличие от моделей сигналов с ограниченным спектром (1.51), необходим спектр, который простирался бы от нуля до бесконечности. Теоретически, чтобы избежать погрешности дискретизации, для такого спектра требуется бесконечно большая частота взятия отсчетов. Практически выбирают такую частоту дискретизации, при которой погрешность не превышает заданной величины В этой связи теорему 2 В.А. Котельникова можно рассматривать как приближенную для функций с неограниченным спектром. На практике частоту отсчетов часто определяют как 2fmk, т.е. интервал между отсчетами
(1.52)
где fm– максимальная допустимая частота в спектре сигнала Х(t)
k– коэффициент запаса (обычно). Так как безграничный частотный спектр заменяется ограниченным, вне которого спектральная плотность принимается равной нулю, то погрешность дискретизации будет определяться соотношением составляющих, лежащих внутри спектра и вне его.
Другой, практически легко реализуемый путь определения оптимального интервала дискретизации ∆tнепрерывного сигнала Х(t) заключается в построении автокорреляционной функции сигнала и нахождении интервала корреляции τк .Дискретные отсчеты, взятые через интервал ∆t=τк, будут независимыми и информативными; для их обработки могут быть использованы методы математической статистики.
В случае, когда непрерывный сигнал Х(t) представлен своими дискретными значениями, полученными при равномерной или неравномерной дискретизации, он может быть заменен некоторой приближающей (аппроксимирующей) зависимостью. В общем случае исходный сигнал может быть аппроксимирован специальной функцией или полиномом, график которого проходит через известные дискретные значения. Наиболее часто используются степенные алгебраические полиномы, но так как обычно исходный сигнал задается в графическом или табличном, а не в аналитическом виде, то проведение аппроксимации полиномами с порядком выше первого затруднительно. При аппроксимации полиномом первого порядка все точки кривой, соответствующие дискретным моментам времени, соединяются отрезками прямых (кусочно-линейная аппроксимация). Алгебраические полиномы удобны для программирования и обработки с помощью вычислительной техники
При квантовании исходного сигнала по уровню возникает погрешность квантования. Так как в процессе преобразования значение сигнала Х(t) обычно отображается ближайшим уровнем квантования Хm, то все значения, кроме кратныхХ, представляются с некоторой погрешностью, максимальное значение которой равно 0,5.
В заключение этого параграфа отметим, что дискретизация и квантование находят широкое применение в преобразователях информации, используемых для связи вычислительных устройств с реальными объектами.
Аналоговый ввод/вывод ПЛК — Control Engineering Russia
Обычно понятие «программируемый логический контроллер» (ПЛК, Programmable logic controllers, PLC) подразумевает блочно-модульную систему универсального назначения, построенную на основе микропроцессора. Как правило, ПЛК содержит центральный процессор, преобразователь напряжения, различную периферию для работы с коммуникационными и беспроводными интерфейсами, а также входы и выходы для взаимодействия с внешними устройствами. Обобщенная структурная схема ПЛК показана на рис. 1.
Рис. 1. Обобщенная структурная схема ПЛК (PLC)
Все имеющиеся на борту контроллера входы и выходы можно разделить на три класса: аналоговые, дискретные и специальные. Аналоговые входы ПЛК служат для ввода непрерывного сигнала с датчиков и других внешних устройств. Аналоговые сигналы делятся на два типа: сигналы по току (4–20 мА) и сигналы по напряжению (от 0–10 В). Аналоговые выходы ПЛК, в свою очередь, служат для плавного управления устройствами. Разделение у аналоговых выходов такое же, как и у входов (по току и по напряжению). Примеры использования аналоговых входов/выходов приведены на рис. 2.
Рис. 2. Применение аналоговых входов и выходов ПЛК
Аналоговые входы
Согласно ГОСТ IEC 61131-2-2012, аналоговый вход (analogue input) — это устройство, преобразующее непрерывный сигнал в дискретное мультибитовое двоичное число для работы в системе программируемых контроллеров.
Для аналоговых входов самыми распространенными являются стандартные диапазоны постоянного напряжения: –10…+10 и 0…+10 В. Для токовых входов диапазоны составляют 0–20 и 4–20 мА (табл. 1).
|
Диапазон сигнала |
Пределы для импеданса входов |
|
±10 В |
10 кОм |
|
0–10 В |
10 кОм |
|
1–5 В |
5 кОм |
|
4–20 мА |
300 Ом |
|
0–20 мА |
300 Ом |
В общем случае измерительный тракт системы обработки аналоговых сигналов состоит из нескольких звеньев (рис. 3): входной сигнал, получаемый с датчика (или датчиков), поступает на усилитель через мультиплексор или напрямую. Главная задача усилителя в данной схеме — нормирование/усиление сигнала до оптимального для АЦП уровня. В свою очередь, АЦП производит оцифровку сигнала в соответствии с уровнем напряжения источника опорного напряжения (ИОН), затем сигнал поступает на центральный процессор, где проходит цифровую обработку.
Рис. 3. Обобщенная структурная схема аналогового входа ПЛК
Однако в зависимости от конкретных задач возможны различные варианты реализации измерительного тракта:
- с независимыми предварительными усилителями и АЦП, одновременно конвертирующими входные сигналы в цифровое представление;
- с мультиплексором в качестве первой ступени, за которым в тракте перед АЦП стоит общий усилитель;
- с отдельными каналами, в каждом из которых стоит усилитель, а перед АЦП включен мультиплексор.
Мультиплексоры в тракте служат для выборки одного из нескольких входных каналов. Мультиплексор, соответствующий требованиям по защите от высоковольтных электростатических разрядов (вплоть до ±35 кВ) или защищенный от скачков напряжения на входах, способен устранить необходимость использования внешних схем, таких как делители напряжения и оптоэлектронные реле. При этом важно иметь низкие согласованные сопротивления открытого канала (RON), поскольку они позволяют обеспечить малые искажения сигналов, улучшив тем самым надежность системы, а также низкие токи утечки, критичные для минимизации ошибок измерения напряжений. К мультиплексорам, применимым в подобных трактах, можно отнести MUX508, MUX36D04, MUX36D08 и MUX36S08 производства Texas Instruments. Данные устройства способны работать с напряжениями 10–36 В (рис. 4).
Рис. 4. Пример подключения мультиплексора к АЦП
Уровень выходного сигнала с датчика может быть очень низким или очень высоким, что для максимизации динамического входного диапазона АЦП требует добавления усилителей или аттенюаторов соответственно. Эти предварительные каскады обычно реализуют на усилителях с программируемым коэффициентом усиления или на дискретных операционных усилителях и прецизионных резистивных делителях. АЦП и усилитель работают в тандеме, чтобы обеспечить наилучшее отношение сигнал/шум (SNR) при заданных ограничениях по стоимости, размерам и потребляемой мощности. Компания Texas Instruments предлагает широкий спектр усилителей с программируемым коэффициентом усиления (PGA281, PGA112), инструментальных усилителей (INA188, INA826), а также операционных усилителей семейства OPA (OPA320, OPA2196, OPA2320, OPA196, OPA191). Пример подключения PGA281 приведен на рис. 5.
Рис. 5. Пример подключения усилителя PGA281 к АЦП
Реализация аналоговых входов по описанным выше схемам достаточно сложна с практической точки зрения, а необходимость использования множества компонентов увеличивает габариты конечного решения. Альтернативой в этом случае может послужить АЦП с интегрированными каскадами предварительной обработки.
Ведущие производители АЦП выпускают специализированные преобразователи для применения в аналоговых модулях ПЛК. Такие преобразователи, как правило, представляют собой многоканальные системы сбора данных на кристалле и содержат множество функциональных модулей: источники тока, программируемые усилители, входы/выходы общего назначения, источники опорного напряжения, блоки достоверности данных и т. д. Примером таких преобразователей являются ADS124S06 и ADS124S08, не так давно выпущенные компанией Texas instruments.
ADS124S06 и ADS124S08 — это высокоточные сигма-дельта АЦП с разрядностью 24 бит и низким энергопотреблением (рис. 6).
Рис. 6. Структурная схема ADS124S08
Данные АЦП имеют в своем составе шесть (ADS124S06) и двенадцать (ADS124S08) мультиплексированных каналов, устройства выборки и хранения, программируемые усилители, цифровые фильтры, а также устройства мониторинга различных системных параметров, в том числе и температурный датчик.
Благодаря встроенным усилителям PGA, ADS124S06 и ADS124S08 не нуждаются во внешних схемах усиления. Усилитель PGA позволяет выбирать усиление в пределах 1–128.
На кристалле данных АЦП расположен ИОН — прецизионный блок с низким дрейфом, откалиброванный производителем до 2,5 В. На соответствующем контакте Vref внутренний ИОН может быть подавлен внешним (внешний ИОН может быть в диапазоне 2,3 В — Vref). Кроме того, ADS124S06 и ADS124S08 оснащены настраиваемыми цифровыми фильтрами с низкой задержкой преобразования и частотой 50 или 60 Гц для работы в промышленных средах с высоким уровнем шума, что в совокупности с ранее описанными особенностями делает их прекрасным решением для применения в ПЛК. Обобщенные характеристики этих АЦП приведены в таблице 2.
|
Характеристика |
ADS124S06 |
ADS124S08 |
|
Разрядность АЦП |
24 бит |
24 бит |
|
Количество измерительных каналов |
6 |
12 |
|
Частота захвата сигнала |
4 кГц |
4 кГц |
|
Тип аналого-цифрового преобразователя |
сигма-дельта |
сигма-дельта |
|
Цифровой интерфейс |
SPI |
SPI |
|
Потребляемая мощность |
1,75 мВт |
1,75 мВт |
|
Конфигурация источника опорного напряжения |
внешний, встроенный |
внешний, встроенный |
|
Диапазон питающих напряжений цифровой части |
2,7–3,6 В |
2,7–3,6 В |
|
Диапазон рабочих температур |
–50…+125 °C |
–50…+125 °C |
Для примера реализации аналоговых входов на базе ADS124S08 компания Texas Instruments выпустила опорный дизайн TIDA-01434.
TIDA-01434
TIDA-01434 — это полнофункциональный законченный модуль аналоговых входов ПЛК (рис. 7), который удовлетворяет современным требованиям эффективности и плотности каналов при небольших габаритах печатной платы, а также обладает низким энергопотреблением и широким диапазоном рабочих температур. Конструкция данного модуля использует конвертер DC/DC в режиме Charge Pump, а переход из одноканального режима в многоканальный легко осуществляется без изменения параметров питания.
Рис. 7. Внешний вид модуля TIDA-01434
Особенности модуля:
- Наличие изолированного источника питания и высокоточного сигма-дельта аналого-цифрового преобразователя;
- наличие биполярного аналогового источника питания с Inverting Charge Pump;
- отсутствие необходимости подключения дополнительных цепей обвязки;
- отсутствие катушек индуктивности на борту, благодаря чему высота модуля составляет всего 3,5 мм;
- возможность внешнего подключения.
Обобщенные характеристики модуля отображены в таблице 3.
|
Параметр |
Величина |
|
Источник питания входного сигнала |
Общая шина питания |
|
Напряжение питания |
3–5,5 В |
|
Ток потребления |
17 мА |
|
Выходное напряжение |
3,3 В; –2,5 В; 2,5 В |
|
КПД |
≈ 12% |
|
Рабочая температура |
–40…+124 °C |
|
Размеры |
35×35×3,65 мм |
В конструкции современных модулей управления аналоговыми сигналами к АЦП, как правило, для повышения производительности добавляется LDO-регулятор. На модуле TIDA-01434 для этих целей предусмотрен специально выделенный LDO-регулятор LM27762 с высоким коэффициентом подавления нестабильности питания (PSRR). Также LM27762 осуществляет функцию формирования биполярного сигнала на АЦП.
При работе с модулем TIDA-01434 нет необходимости включения в цепь дополнительных компонентов, в частности не нужно добавлять фильтры типа RC или LC для фильтрации импульсов с источника питания; это стало возможным благодаря применению в схеме цифрового изолятора ISOW7841.
TIDA-01434 предназначен для работы в качестве одно- или многоканального аналогового входа с биполярными входными сигналами и применяется в большинстве случаев для построения решений на базе ПЛК, но не ограничивается только этим. Модуль подходит как для систем типа «канал-канал» (channel-to-channel), так и для входов с групповой изоляцией. В системе channel-to-channel каждый канал входного сигнала имеет собственную «землю» — такая топология позволяет работать с входными сигналами с большей разницей потенциалов. При использовании топологии групповой изоляции величины допустимых напряжений ограничены. В данном случае предпочтительно использовать топологию типа channel-to-channel.
Модуль TIDA-01434, помимо упомянутых ранее АЦП ADS124S08 и преобразователя LM27762 типа Charge Pump, имеет на борту линейный регулятор TPS7A87, источник опорного напряжения и тока REF6225, цифровой изолятор ISOW7841 и ISO7741, а также неинвертирующие буферы SN74AHC1G04 и SN74AHC1G125 (рис. 8).
Рис. 8. Блок-схема TIDA-01434
Для удобства отладки и оценки возможностей модуля можно использовать отладочную плату на базе контроллера MSP430FR5969 (рис. 9).
Рис. 9. Внешний вид отладочной платы MSPEXP430FR5969
Аналоговые выходы
В соответствии с ГОСТ IEC 61131–2-2012 аналоговый выход (analogue output) — это устройство, которое преобразовывает мультибитовое двоичное число из системы программируемых контроллеров в непрерывный сигнал. Номинальные значения и пределы импеданса для аналоговых выходов отображены в таблице 4.
|
Диапазон сигнала |
Пределы для импеданса вводов |
|
±10 В |
1000 Ом |
|
0–10 В |
1000 Ом |
|
1–5 В |
500 Ом |
|
4–20 мА |
600 Ом |
|
0–20 мА |
600 Ом |
В общем случае тракт генерации выходных аналоговых сигналов включает ряд звеньев (рис. 10): цифровые данные, поступающие от центрального процессора, могут быть преобразованы в аналоговое напряжение или ток, например, с помощью ЦАП и схем последующей обработки выходного сигнала. Дальнейшая обработка обеспечивает необходимую подстройку выходного сигнала, в том числе калибровку смещения, опорного напряжения и усиления.
Рис. 10. Обобщенная структурная схема аналогового выхода ПЛК
ЦАП, применяемые в программируемых логических контроллерах, должны соответствовать строгим электротехническим требованиям как по точности (погрешность на выходе не более 0,1%), так и по защитным характеристикам (4-й уровень защиты согласно ГОСТ 30804.4.2-2013), а также удовлетворять параметрам подачи аналоговых сигналов (коммутировать 4–20 мА и 0–10 В), работать со стандартным в этой сфере диапазоном напряжений (12–32 В) и иметь рассеиваемую мощность не более 1 Вт.
Одним из таких ЦАПов является DAC8775 от компании Texas Instruments (рис. 11).
Рис. 11. Структурная схема DAC8775
DAC8775 — это первый в отрасли ЦАП с выходом 4–20 мА и интегрированным преобразователем напряжения, имеет полную нескорректированную ошибку в 0,1% и способен работать в расширенном промышленном диапазоне температур –40…+125 °C. При работе с напряжением 12 В DAC8775 имеет потребляемую мощность всего 780 мВт. Кроме того, данный ЦАП динамически регулирует величину напряжения питания в соответствии с током нагрузки, подключенной к выходу 4–20 мА. В результате система имеет хорошо управляемые тепловые характеристики, позволяющие разместить большее количество каналов в меньшем форм-факторе. Более подробные характеристики DAC8775 приведены в таблице 5.
|
Параметр |
Величина |
|
Разрешение преобразователя |
16 |
|
Количество каналов |
4 |
|
Время стабилизации |
10 мкс |
|
Скорость преобразования |
33 кГц |
|
Интерфейс обмена данными |
SPI |
|
Тип выхода |
Выходной усилитель тока, выходной усилитель напряжения |
|
Отклонение коэффициента усиления от идеального значения |
±0,1% |
|
Опорное напряжение |
5 В |
|
Конфигурация источника опорного напряжения |
Внешний, встроенный |
|
Напряжение питания |
12–36 В |
|
Потребляемая мощность |
780 мВт |
|
Рабочая температура |
–40…+125 °C |
|
Корпус |
QFN-72, VQFN-72 |
На базе данного цифро-аналогового преобразователя компанией Texas Instruments был выпущен модуль TIPD215.
TIPD215
TIPD215 представляет собой аналоговый 4-канальный модуль (рис. 12) на базе DAC8775 с интегрированным преобразователем LM5166, благодаря которому общая рассеиваемая мощность (при задействовании всех четырех каналов, по 20мА на канал) составляет менее 1 Вт.
Рис. 12. Внешний вид модуля TIPD215
Модуль TIPD215 работает с входным напряжением в диапазоне 12,5–40 В и генерирует на выходе четыре независимых источника, которые можно использовать для контроля за подключенной периферией (рис. 13).
Рис. 13. Схема включения модуля TIPD215
К особенностям модуля TIPD215 стоит отнести:
- четыре канала для управления аналоговыми выходами;
- коммутируемый ток: 4–20 мА на канал;
- выходное напряжение: ±10 В;
- диапазон входных напряжений: 12,5–40 В;
- менее 1 Вт рассеиваемой мощности;
- адаптивное управление питанием токовых выходов.
Построенный на базе DAC8775 модуль обладает высокими параметрами надежности: встроенные в DAC8775 средства диагностики способны находить обрывы и короткие замыкания нагрузки, вести мониторинг температуры кристалла, вычислять циклические суммы, с помощью сторожевого таймера контролировать зависание шины SPI и проверять соответствие границ напряжения питания заданным значениям. Кроме того, разработчикам предоставляется возможность программировать способы реакции устройства на аварийные ситуации, что, в свою очередь, значительно упрощает процесс выявления неполадок системы на ранних стадиях и помогает обеспечить высокую надежность ее функционирования.
Также модуль TIPD215 обладает высоким КПД и малым временем отклика. В устройство заложены инновационные возможности самообучения, позволяющие вычислять импеданс нагрузки токовой петли 4–20 мА и динамически снижать напряжение источника питания, благодаря чему уменьшается время установления и достигается эффективный баланс между КПД и скоростью отклика.
Для обеспечения генерации биполярного напряжения в цепь DAC8775 включена индуктивность величиной 100 мкГн. Данная индуктивность рассчитана на коммутацию максимально возможного значения тока 500 мA и может быть уменьшена до 80 мкГн, однако в таком случае это снизит эффективность конвертера и увеличит пульсации на выходе.
Другие решения Texas Instruments, используемые для реализации аналоговых входов и выходов
Компания Texas Instruments предоставляет разработчикам широкий перечень всевозможных решений для упрощения процесса реализации аналоговых входов и выходов (табл. 6).
|
Наименование |
Описание |
|
TIPD216 |
4-канальный драйвер выхода на базе цифро-аналогового преобразователя DAC8775 |
|
TIDA-03031 |
Оценочная плата на базе электронного предохранителя TPS2660 и 25-Вт резервного источника питания |
|
TIDA-00233 |
Решение для защиты входов ПЛК (10 А, 24 В) |
|
TIDA-00401 |
10-Вт изолированный источник питания с широким диапазоном входных напряжений (15–36 В) |
|
TIDA-00118 |
Тестовая плата для 16-разрядного модуля аналогового выхода ПЛК |
|
PMP10189 |
Преобразователь напряжения на базе микросхем LM5017, TPS62160, TLV62080 и TPS62160 |
|
TIDA-01438 |
Модуль защиты от электростатических импульсов, построенный на базе TVS-диодов |
|
TIDA-00689 |
Низкопрофильный и малогабаритный изолированный источник питания |
|
TIDA-00688 |
Изолированный источник питания. Имеет изолированные выходы ±15 В и 5 В в форм-факторе с высотой 2,2 мм |
|
TIDA-00237 |
Изолированный источник питания мощностью 1 Вт с диапазоном входного напряжения 12–36 В |
|
TIDA-00400 |
Изолированный источник питания с 3 выходами: ±15 В/30 мА и +5 В/40 мА |
|
PMP8871 |
Обратноходовой преобразователь с выходным напряжением 5 В, 1 А |
|
TIDEP-0086 |
Оценочный модуль для работы с Ethernet-интерфейсом |
|
TIDEP0033 |
Оценочный модуль для работы с SPI-интерфейсом |
|
TIDA-00204 |
Оценочный модуль для работы с гигабитным Ethernet |
|
TIDA-00230 |
Модуль для настройки и логирования NFC (два порта FRAM: NFC<->FRAM<->Serial) |
|
TIDA-00560 |
Проект 16-канального статусного LED-драйвера, предназначенный для индикации статуса нескольких аналоговых и цифровых входных и выходных каналов |
|
TIDA-01333 |
8-канальный модуль аналогового ввода на базе АЦП ADS8681 |
|
TIDA-00550 |
Проект модуля с двумя изолированными универсальными аналоговыми входными каналами на базе АЦП ADS1262 |
|
TIDA-00164 |
8-канальный модуль аналогового ввода на базе 16-битного АЦП ADS8688 |
|
TIDA-00764 |
8-канальный модуль аналогового ввода на базе 16-битного АЦП ADS8681 |
|
TIPD195 |
Референс-дизайн 3-контактного ПЛК |
|
TIPD169 |
16-битная система сбора данных (DAQ) с частотой выборки 1 MSPS и несбалансированным мультиплексированным входом |
|
TIPD166 |
8-канальный модуль аналогового ввода на базе 16-битного АЦП ADS8688 |
|
TIPD164 |
Модуль аналогового ввода для промышленного оборудования и температурных датчиков |
|
TIPD151 |
Базовый проект 16-битной 4-канальной мультиплексированной системы сбора данных с частотой выборок 400 KSPS, высоковольтными входами и низким уровнем искажений |
|
TIDEP0032 |
Мулитипротокольный промышленный Ethernet-детектор W/PRU-ICSS |
|
TIDEP0028 |
Платформа разработчика Ethernet PowerLink |
|
TMDSICE3359 |
Отладочная платформа для индустриальных систем на базе процессора Sitara AM335x и с возможностью работы с PROFIBUS |
|
TIDEP0029 |
Сертифицированное устройство для работы с Profinet IRT V2.3 с 1-ГГц процессором |
|
TIDEP0010 |
Платформа разработки связи по Sercos III на базе AM335x |
|
TIDEP0003 |
Решение является платформой для создания и разработки ETHERNET/IP-коммуникаций |
|
TIDEP0079 |
Проект EtherCAT на базе Sitara AM57x и PRU-ICSS с передачей в определенных временных интервалах |
|
TIDA-00231 |
Адаптивный источник питания для ПЛК с аналоговым защищенным выходом на базе DAC8760 и LM5017 |
|
TIPD155 |
2-канальный модуль с аналоговыми выходами по напряжению и току на базе АЦП DAC8563 и драйвера XTR300 |
Заключение
В создании автоматизированных систем на базе ПЛК правильное построение аналоговых входов и выходов является одной из главных задач: от разработчика требуется следование ГОСТ IEC 61131-2-2012, точное выполнение приведенных спецификаций токов и напряжений, а также обеспечение необходимого уровня защиты с соблюдением стоимостных и габаритных характеристик конечного продукта. Компания Texas Instruments предоставляет специалистам весь необходимый перечень компонентов и модулей для простого и быстрого выполнения данной задачи.
Вконтакте
Google+
Литература- ГОСТ IEC 61131-2-2012 «Контроллеры программируемые. Часть 2. Требования к оборудованию и испытания».
- Isolated, Transformerless, Bipolar Supply for 24-Bit ADCs Reference Design. www.ti.com/tool/TIDA-01434
- Less Than 1-W, Quad-Channel, Analog Output Module With Adaptive Power Management Reference Design. www.ti.com/tool/TIPD215
- Лившиц Ю. Е., Лакин В. И., Монич Ю. И. Программируемые логические контроллеры для управления технологическими процессами. Минск, БНТУ, 2014.
Дискретно-непрерывный сигнал — Большая Энциклопедия Нефти и Газа, статья, страница 1
Дискретно-непрерывный сигнал
Cтраница 1
Дискретно-непрерывный сигнал с гармонической несущей величиной, представляемый амплитудой ( а), частотой ( б) и фазой ( в) синусоидальной величины. [1]
Дискретно-непрерывный сигнал с импульсной несущей величиной, представляемый высотой ( а), шириной ( б) и частотой ( в) импульсов. [2]
Примером дискретно-непрерывных сигналов является последовательность прямоугольных импульсов тока или напряжения. [3]
Другим характерным преобразованием аналоговых дискретно-непрерывных сигналов являются замена гармонического процесса импульсным посредством времяимпульсной модуляции. При этом сигнал остается дискретно-непрерывным, но преобразуется информационный параметр. [4]
Он функционирует аналогично интегратору измерительных преобразователей фазы и частоты в дискретно-непрерывный сигнал ( см. рис. 3.32), отличается лишь отсутствием ключа в цепи обратной связи. Поэтому интегратор AJ на рис. 3.41 не приводится в исходное ( нулевое) состояние в начале каждого цикла интегрирования, равного длительности половины периода Гп ( периоду изменения переменной составляющей тока / срвх удвоенной промышленной частоты), а запоминает по цепи обратной связи йос напряжение UBblx ( nTn) на конденсаторе С в конце цикла интегрирования. [6]
Он функционирует аналогично интегратору измерительных преобразователей фазы и частоты в дискретно-непрерывный сигнал ( см. рис. 3.32), отличается лишь отсутствием ключа в цепи обратной связи. Поэтому интегратор AJ на рис. 3 41 не приводится в исходное ( нулевое) состояние в начале каждого цикла интегрирования, равного длительности половины периода Тп ( периоду изменения переменной составляющей тока icpBX удвоенной промышленной частоты), а запоминает по цепи обратной связи йос напряжение ияыж ( пТп) Ha конденсаторе С в конце цикла интегрирования. [8]
К аналоговым относятся элементы с непрерывными ( см. рис. 1.2, а) и дискретно-непрерывными ( дискретизованными только по времени) с гармоническим несущим процессом ( см. рис. 1.3, а, б, в) входным и выходным сигналами и элементы с дискретно-непрерывными сигналами с импульсным ( в виде прямоугольных импульсов с информационными параметрами Д / или 9, см. рис. 1.3, д, е) несущим процессом. Они называются непрерывными и времяимпульсными аналоговыми элементами. [9]
Преобразование аналоговых сигналов, прежде всего, состоит в амплитудной, фазовой и частотной демодуляции. При этом дискретно-непрерывные сигналы превращаются в непрерывные. [10]
При параллельном коде импульсы или дискретные потенциальные сигналы появляются одновременно на соответствующих выходах функционального элемента. Рассмотренные сигналы целесообразно объединить в две основные группы — аналоговую и дискретную. К аналоговым относятся непрерывные и дискретно-непрерывные сигналы, к дискретным — собственно дискретные, в частности цифровые, и непрерывно — дискретные. Таким образом, две основные группы сигналов определяются непрерывностью или дискретностью информационных параметров несущих процессов вне зависимости от непрерывности или дискретности времени. [11]
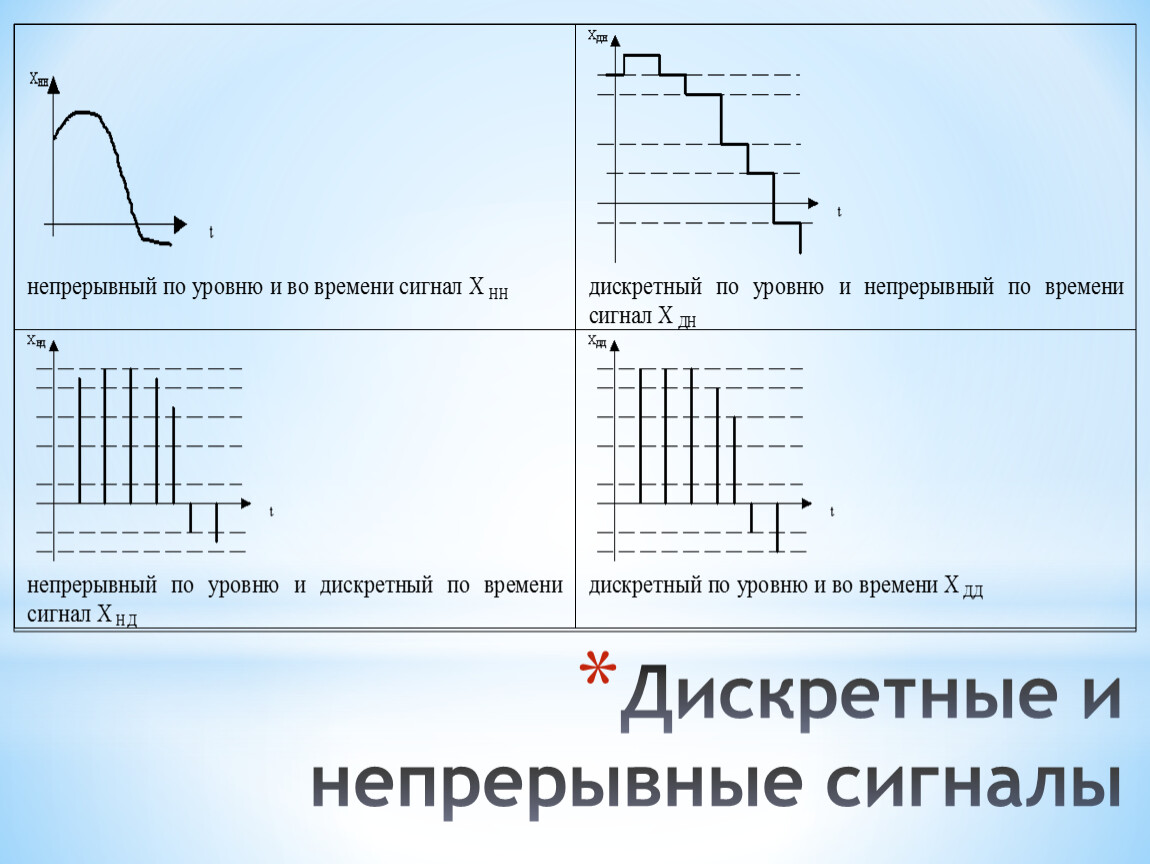
Сигнал, являющийся дискретным только по времени, или только по уровню, принято называть дискретно-непрерывным. В связи с этим в дальнейшем под дискретно-непрерывным сигналом мы будем подразумевать сигналы, дискретные по времени и непрерывные по уровню. [12]
Сигналы, непрерывные по уровню и времени, называют непрерывными. Сигналы, дискретные по уровню и времени, называют дискретными. Сигнал, являющийся дискретным только по времени или только по уровню, принято называть дискретно-непрерывным. На практике из этой группы сигналов преимущественное применение нашли сигналы, дискретные только по времени. В связи с этим в дальнейшем под дискретно-непрерывными сигналами будем подразумевать сигналы, дискретные по времени и непрерывные по уровню. [13]
Страницы: 1
Сигналы дискретного времени
Сигналы дискретного времени
Время и терминология частоты
Модели Simulink® могут обработать и дискретное время и сигналы непрерывного времени. Модели, созданные с DSP System Toolbox™, предназначаются, чтобы обработать сигналы дискретного времени только. Сигнал дискретного времени является последовательностью значений, которые соответствуют конкретным моментам вовремя. Моменты времени, в которые задан сигнал, являются шагами расчета сигнала, и связанные значения сигналов являются выборками сигнала. Традиционно, сигнал дискретного времени считается неопределенным в моментах времени между шагами расчета. Для периодически производимого сигнала равный интервал между любыми парами последовательных шагов расчета является периодом расчета сигнала Ts. Частота дискретизации Fs является обратной величиной периода расчета или 1/Ts. Частота дискретизации является количеством выборок в сигнале в секунду.
Эти 7,5 вторых треугольных сегментов волны имеют период расчета 0,5 секунд и шаги расчета 0,0, 0.5, 1.0, 1.5…, 7.5. Частота дискретизации последовательности поэтому 1/0.5, или 2 Гц.
Много различных терминов используются, чтобы описать характеристики сигналов дискретного времени, найденных в моделях Simulink. Эта таблица приводит термины, которые часто используются, чтобы описать, как различные блоки работают с основанными на выборке и основанными на системе координат сигналами.
| Термин | Символ | Модули | Примечания |
|---|---|---|---|
Период расчета | Ts | Секунды | Временной интервал между последовательными выборками в последовательности, как вход с блоком (Tsi) или выходом от блока (Цо). |
Структурируйте период | Tf | Секунды | Временной интервал между последовательными системами координат в последовательности, как вход с блоком (Tfi) или выходом от блока (Tfo). |
Период сигнала | T | Секунды | Время протекло во время одного повторения периодического сигнала. |
Демонстрационная частота | Fs | Гц (выборки в секунду) | Количество выборок в единицу времени, Фс = 1/Ts. |
Частота | f | Гц (циклы в секунду) | Количество повторений в единицу времени периодического компонента сигнала или сигнала, f = 1/T. |
Уровень Найквиста | Гц (циклы в секунду) | Минимальная частота дискретизации, которая старается не искажать, обычно дважды самая высокая частота в производимом сигнале. | |
Частота Найквиста | fnyq | Гц (циклы в секунду) | Дважды самая высокая частота, существующая в сигнале. |
Нормированная частота | fn | Два цикла на выборку | Частота (линейная) из периодического сигнала, нормированного к половине частоты дискретизации, f n = ω/π = 2f/Fs. |
Угловая частота | Ω | Радианы в секунду | Частота периодического сигнала в угловых единицах, Ω = 2πf. |
Цифровой (нормировал угловой), частота | ω | Радианы на выборку | Частота (угловая) из периодического сигнала, нормированного к частоте дискретизации, ω = Ω/Fs = πfn. |
Примечание
В диалоговых окнах блока термин шаг расчета используется, чтобы отослать к периоду расчета Ts. Например, параметр в блоке Signal From Workspace задает период расчета импортированного сигнала.
Рекомендуемые настройки для симуляций дискретного времени
Simulink позволяет вам выбирать из нескольких различных алгоритмов решателя симуляции. Можно получить доступ к этим алгоритмам решателя из модели Simulink:
На вкладке Modeling нажмите Model Settings. Диалоговое окно открывается.
Выборы, которые вы делаете в панели Solver, определяют, как сигналы дискретного времени обрабатываются в Simulink. Рекомендуемые настройки для симуляций обработки сигналов:
Ввод:
Fixed-stepSolver:
Discrete (no continuous states)Fixed-step size (fundamental sample time):
autoTreat each discrete rate as a separate task:
Off
Можно автоматически установить эти опции решателя для всех новых моделей при помощи шаблонов модели DSP Simulink. Для получения дополнительной информации смотрите, Конфигурируют окружение Simulink для Моделей Обработки сигналов.
Режимы управления задачами Simulink
Когда тип решателя установлен в Fixed-step, Simulink действует в двух режимах управления задачами:
На вкладке Modeling нажмите Model Settings. Диалоговое окно открывается. В панели Solver выберите Type> Fixed-step. Расширьте детали Решателя. Чтобы задать многозадачный режим, выберите Treat each discrete rate as a separate task. Чтобы задать однозадачный режим, очистите Treat each discrete rate as a separate task.
Если вы выбираете параметр Treat each discrete rate as a separate task, однозадачный режим все еще используется в этих случаях:
Если ваша модель содержит один шаг расчета
Если ваша модель содержит непрерывное и дискретный шаг расчета, и размер фиксированного шага равен дискретному шагу расчета
Для типичной модели, которая работает с одним уровнем, Simulink выбирает однозадачный режим.
Однозадачный режим фиксированного шага
На фиксированном шаге, однозадачном режиме, сигналы дискретного времени отличаются от прототипа, описанного вовремя и Терминология Частоты путем оставления заданными между шагами расчета. Например, представление волны треугольника дискретного времени выглядит так.
Значение этого сигнала в t = 3.112 секунды совпадают со значением сигнала в t = 3 секунды. На фиксированном шаге, однозадачном режиме, шаги расчета сигнала являются моментами, где сигналу позволяют изменить значения, а не где сигнал задан. Между шагами расчета сигнал берет значение в предыдущем шаге расчета.
В результате на фиксированном шаге, однозадачном режиме, Simulink разрешает операции кросс-курса, такие как сложение двух сигналов различных уровней. Это объяснено далее в Операциях Кросс-курса.
Другие настройки для симуляций дискретного времени
Полезно знать, как другие опции решателя, доступные в Simulink, влияют на сигналы дискретного времени. В частности, необходимо знать о свойствах сигналов дискретного времени при этих настройках:
Type:
Fixed-step, выберите Treat each discrete rate as a separate task, чтобы включить многозадачный режим.Когда фиксированный шаг, многозадачный решатель выбран, дискретные сигналы в Simulink не определены между шагами расчета. Simulink генерирует ошибку, когда операции пытаются сослаться на неопределенную область сигнала, как, например, когда сигналы с различными частотами дискретизации добавляются.
Type:
Variable-step(решатель значения по умолчанию Simulink)Когда
Variable-stepрешатель выбран, сигналы дискретного времени остаются заданными между шагами расчета, так же, как на фиксированном шаге, однозадачный случай, описанный в Рекомендуемых Настройках для Симуляций Дискретного времени. КогдаVariable-stepрешатель выбран, операции кросс-курса позволены Simulink.
Для типичной модели, содержащей несколько уровней, Simulink выбирает многозадачный режим.
Операции кросс-курса
Когда фиксированный шаг, многозадачный решатель выбран, дискретные сигналы в Simulink не определены между шагами расчета. Поэтому, чтобы выполнить операции кросс-курса как сложение двух сигналов с различными частотами дискретизации, необходимо преобразовать два сигнала в общую частоту дискретизации. Несколько блоков в библиотеках Signal Operations и Multirate Filters могут выполнить эту задачу. Смотрите Преобразуют Частоты дискретизации и Частоту кадров в Simulink для получения дополнительной информации. Изменение уровня может произойти неявно в зависимости от диагностических настроек. Однако это не рекомендуется. Смотрите Многозадачную передачу данных (Simulink), Одна передача данных задачи (Simulink). Путем требования явных преобразований уровня для операций кросс-курса в дискретном режиме Simulink помогает вам идентифицировать, что преобразование частоты дискретизации выходит рано в процессе проектирования.
Когда Variable-step решатель или фиксированный шаг, однозадачный решатель выбран, сигналы дискретного времени остаются заданными между шагами расчета. Поэтому, если вы произведете сигнал с уровнем или фазой, которая отличается от собственного уровня и фазы сигнала, вы все еще измерите значимые значения:
В командной строке MATLAB® введите
ex_sum_tut1.Модель Cross-Rate Sum Example открывается. Эта модель добавляет два сигнала с различными периодами расчета.
Дважды кликните верхний блок Signal From Workspace. Диалоговое окно открывается.
Установите параметр Sample time на
1.Это создает быстрый сигнал (Ts =1) с шагами расчета 1, 2, 3…
Дважды кликните более низкий блок Signal From Workspace.
Установите параметр Sample time на
2.Это создает медленный сигнал (Ts =2) с шагами расчета 1, 3, 5…
На вкладке Debug выберите Information Overlays> Colors.
Выбор Colors позволяет вам видеть различные частоты дискретизации в действии. Для получения дополнительной информации о расцветке шагов расчета, информация о Шаге расчета вида на море (Simulink).
Запустите модель.
Примечание
Используя шаблоны модели DSP Simulink с кросс-курсом операции генерируют ошибки даже при том, что фиксированный шаг, однозадачный решатель выбран. Это — то, вследствие того, что Single task data transfer установлен в
errorв панели раздела диалогового окна .В командной строке MATLAB введите
dsp_examples_yout.Следующий вывод отображен:
dsp_examples_yout = 1 1 2 2 1 3 3 2 5 4 2 6 5 3 8 6 3 9 7 4 11 8 4 12 9 5 14 10 5 15 0 6 6Первый столбец матрицы является быстрым сигналом (Ts =1). Второй столбец матрицы является медленным сигналом (Ts =2). Третий столбец является суммой двух сигналов. Как ожидалось медленный сигнал изменяется один раз в 2 секунды, вдвое менее часто, чем быстрый сигнал. Тем не менее, медленный сигнал задан в каждый момент, потому что Simulink содержит предыдущее значение более медленного сигнала во время экземпляров времени, что блок не запускается.
В общем случае для Variable-step и фиксированный шаг, однозадачные режимы, когда вы измеряете значение дискретного сигнала между шагами расчета, вы наблюдаете значение сигнала в предыдущем шаге расчета.
Вейвлет-преобразование
Вейвлет-преобразование
Вейвлет-преобразование — преобразование, похожее на преобразование Фурье (или гораздо больше на оконное преобразование Фурье) с совершенно иной оценочной функцией. Основное различие лежит в следующем: преобразование Фурье раскладывает сигнал на составляющие в виде синусов и косинусов, т.е. функций, локализованных в Фурье-пространстве; напротив, вейвлет-преобразование использует функции, локализованные как в реальном, так и в в Фурье-пространстве. В общем, вейвлет-преобразование может быть выражено следующим уравнением:
где * — символ комплексной сопряженности и функция ψ — некоторая функция. Функция может быть выбрана произвольным образом, но она должна удовлетворять определённым правилам.
Как видно, вейвлет-преобразование на самом деле является бесконечным множеством различных преобразований в зависимости от оценочной функции, использованной для его расчёта. Это является основной причиной, почему термин «вейвлет-преобразование» используется в весьма различных ситуациях и для различных применений. Также существует множество типов классификации вариантов вейвлет-преобразования. Здесь мы покажем только деление, основанное на ортогональности вейвлетов. Можно использовать ортогональные вейвлеты для дискретного вейвлет-преобразования и неортогональные вейвлеты для непрерывного. Эти два вида преобразования обладают следующими свойствами:
- Дискретное вейвлет-преобразование возвращает вектор данных той же длины, что и входной. Обычно, даже в этом векторе многие данные почти равны нулю. Это соответствует факту, что он раскладывается на набор вейвлетов (функций), которые ортогональны к их параллельному переносу и масштабированию. Следовательно, мы раскладываем подобный сигнал на то же самое или меньшее число коэффициентов вейвлет-спектра, что и количество точек данных сигнала. Подобный вейвлет-спектр весьма хорош для обработки и сжатия сигналов, например, поскольку мы не получаем здесь избыточной информации.
- Непрерывное вейвлет-преобразование, напротив, возвращает массив на одно измерение больше входных данных. Для одномерных данных мы получаем изображение плоскости время-частота. Можно легко проследить изменение частот сигнала в течение его длительности и сравнивать этот спектр со спектрами других сигналов. Поскольку здесь используется неортогональный набор вейвлетов, данные высоко коррелированы и обладают большой избыточностью. Это помогает видеть результат в более близком человеческому восприятию виде.
Дополнительные подробности о вейвлет-преобразовании доступны на тысячах интернет-ресурсов о вейвлетах в сети, или, например, здесь [1].
В библиотеке обработки данных Gwyddion реализованы оба этих преобразования и использующие вейвлет-преобразование модули доступны в меню → .
Дискретное вейвлет-преобразование
Дискретное вейвлет-преобразование (DWT) — реализация вейвлет-преобразования с использованием дискретного набора масштабов и переносов вейвлета, подчиняющихся некоторым определённым правилам. Другими словами, это преобразование раскладывает сигнал на взаимно ортогональный набор вейвлетов, что является основным отличием от непрерывного вейвлет-преобразования (CWT), или его реализации для дискретных временных рядов, иногда называемой непрерывным вейвлет-преобразованием дискретного времени (DT-CWT).
Вейвлет может быть сконструирован из функции масштаба, которая описывает свойства его масштабируемости. Ограничение состоит в том, что функция масштаба должна быть ортогональна к своим дискретным преобразованиям, что подразумевает некоторые математические ограничения на них, которые везде упоминаются, т.е. уравнение гомотетии
где S — фактор масштаба (обычно выбирается как 2). Более того, площадь под функцией должна быть нормализована и функция масштабирования должна быть ортогональна к своим численным переносам, т.е.
После введения некоторых дополнительных условий (поскольку вышеупомянутые ограничения не приводят к единственному решению) мы можем получить результат всех этих уравнений, т.е. конечный набор коэффициентов ak которые определяют функцию масштабирования, а также вейвлет. Вейвлет получается из масштабирующей функции как N где N — чётное целое. Набор вейвлетов затем формирует ортонормированный базис, который мы используем для разложения сигнала. Следует отметить, что обычно только несколько коэффициентов ak будут ненулевыми, что упрощает расчёты.
На следующем рисунке показаны некоторые масштабирующие функции и вейвлеты. Наиболее известным семейством ортонормированных вейвлетов явлется семейство Добеши. Её вейвлеты обычно обозначаются числом ненулевых коэффициентов ak, таким образом, мы обычно говорим о вейвлетах Добеши 4, Добеши 6, и т.п. Грубо говоря, с увеличением числа коэффициентов вейвлета функции становятся более гладкими. Это явно видно при сравнении вейвлетов Добеши 4 и 20, представленных ниже. Другой из упомянутых вейвлетов — простейший вейвлет Хаара, который использует прямоугольный импульс как масштабирующую функцию.
Существует несколько видов реализации алгоритма дискретного вейвлет-преобразования. Самый старый и наиболее известный – алгоритм Малла (пирамидальный). В этом алгоритме два фильтра – сглаживающий и несглаживающий составляются из коэффициентов вейвлета и эти фильтры рекуррентно применяются для получения данных для всех доступных масштабов. Если используется полный набор данных D = 2N и длина сигнала равна L, сначала рассчитываются данные D/2 для масштаба L/2N — 1, затем данные (D/2)/2 для масштаба L/2N — 2, … пока в конце не получится 2 элемента данных для масштаба L/2. Результатом работы этого алгоритма будет массив той же длины, что и входной, где данные обычно сортируются от наиболее крупных масштабов к наиболее мелким.
В Gwyddion для расчёта дискретного вейвлет-преобразования используется пирамидальный алгоритм. Дискретное вейвлет-преобразование в двумерном пространстве доступно в модуле DWT.
Дискретное вейвлет-преобразование может использоваться для простого и быстрого удаления шума с зашумлённого сигнала. Если мы возьмём только ограниченное число наиболее высоких коэффициентов спектра дискретного вейвлет-преобразования, и проведём обратное вейвлет-преобразование (с тем же базисом) мы можем получить сигнал более или менее очищенный от шума. Есть несколько способов как выбрать коэффициенты, которые нужно сохранить. В Gwyddion реализованы универсальный порог, адаптивный по масштабу порог [2] и адаптивный по масштабу и пространству порог [3]. Для определения порога в этих методах мы сперва определяем оценку дисперсии шума, заданную
где Yij соответствует всем коэффициентам наиболее высокого поддиапазона масштаба разложения (где, как предполагается, должна присутствовать большая часть шума). Или же дисперсия шума может быть получена независимым путём, например, как дисперсия сигнала АСМ, когда сканирование не идёт. Для наиболее высокого поддиапазона частот (универсальный порог) или для каждого поддиапазона (для адаптивного по масштабу порога) или для окружения каждого пикселя в поддиапазоне (для адаптивного по масштабу и пространству порога) дисперсия рассчитывается как
Значение порога считается в конечном виде как
где
Когда порог для заданного масштаба известен, мы можем удалить все коэффициенты меньше значения порога (жесткий порог) или мы можем уменьшит абсолютное значение этих коэффициентов на значение порога (мягкий порог).
Удаление шума DWT доступно в меню → → .
Непрерывное вейвлет-преобразование
Непрерывное вейвлет-преобразование (CWT) — реализация вейвлет-преобразования с использованием произвольных масштабов и практически произвольных вейвлетов. Используемые вейвлеты не ортогональны и данные, полученные в ходе этого преобразования высоко коррелированы. Для дискретных временных последовательностей также можно использовать это преобразование, с ограничением что наименьшие переносы вейвлета должны быть равны дискретизации данных. Это иногда называется непрерывным вейвлет-преобразованием дискретного времени (DT-CWT) и это наиболее часто используемый метод расчёта CWT в реальных применениях.
В принципеЮ непрерывное вейвлет-преобразование работает используя напрямую определение вейвлет-преобразования, т.е. мы рассчитываем свёртку сигнала с масштабированным вейвлетом. Для каждого масштаба мы получаем этим способом набор той же длины N, что и входной сигнал. Используя M произвольно выбранных масштабов мы получаем поле N×M, которое напрямую представляет плоскость время-частота. Алгоритм, используемый для этого расчёта может быть основан на прямой свёртке или на свёртке посредством умножения в Фурье-пространстве (это иногда называется быстрым вейвлет-преобразованием).
Выбор вейвлета для использования в разложении на время-частоту является наиболее важной вещью. Этим выбором мы можем влиять на разрешение результата по времени и по частоте.Нельзя изменить этим путём основные характеристики вейвлет-преобразования (низкие частоты имеют хорошее разрешение по частотам и плохое по времени; высокие имеют плохое разрешение по частотам и хорошее по времени), но можно несколько увеличить общее разрешение по частотам или по времени. Это напрямую пропорционально ширине используемого вейвлета в реальном и Фурье-пространстве. Если, например, использовать вейвлет Морле (реальная часть – затухающая функция косинуса), то можно ожидать высокого разрешения по частотам, поскольку такой вейвлет очень хорошо локализован по частоте. наоборот, используя вейвлет Производная Гауссиана (DOG) мы получим хорошую локализацию по времени, но плохую по частоте.
Непрерывное вейвлет-преобразование реализовано в модуле CWT, который доступен в меню → → .
[1] Adhemar Bultheel: Learning to swim in a sea of wavelets. Bull. Belg. Math. Soc. Simon Stevin 2 (1995), 1-45, doi:10.36045/bbms/1103408773
[2] S. G. Chang, B. Yu, M. Vetterli: Adaptive wavelet thresholding for image denoising and compression. IEEE Trans. Image Processing 9 (2000) 1532–1536, doi:10.1109/83.862633
[3] S. G. Chang, B. Yu, M. Vetterli: Spatially adaptive wavelet thresholding with context modeling for image denoising. IEEE Trans. Image Processing 9 (2000) 1522–1531, doi:10.1109/83.862630
Continuous-Time Signal — обзор
1.1 Введение
Достижения в области цифровых схем и системных технологий оказали огромное влияние на современное общество, связанное с использованием компьютерных технологий для многих приложений, которые влияют на нашу повседневную жизнь. Эти достижения позволили достичь соответствующих достижений в цифровой обработке сигналов (DSP), которые привели к использованию DSP для многих приложений, таких как цифровая фильтрация шума, частотный анализ сигналов, распознавание и сжатие речи, шумоподавление и анализ биомедицинских сигналов, улучшение изображения. и многие другие приложения, связанные с коммуникацией, телевидением, хранением и поиском данных, обработкой информации и т. д.[1].
Сигналом можно считать то, что передает информацию [2]. Например, сигнал может передавать информацию о состоянии или поведении физической системы или физических явлениях, или он может использоваться для передачи информации через среду связи. Сигналы могут использоваться для передачи информации между людьми, между людьми и машинами или между двумя или более машинами. Информация в сигнале представлена как вариации в шаблонах для некоторой величины, которой можно манипулировать, сохранять или передавать с помощью физического процесса [3].Например, речевой сигнал может быть представлен как функция времени, а изображение может быть представлено как функция двух пространственных переменных. Речевой сигнал можно рассматривать как одномерный сигнал, потому что он имеет одну независимую переменную — время. Изображение можно рассматривать как двумерный сигнал, поскольку оно имеет две независимые переменные, такие как ширина и высота. Обычно используется соглашение о выражении независимой переменной для одномерных сигналов как время, хотя фактическая независимая переменная может не быть временем.Это соглашение обычно используется в этом тексте.
Независимые переменные для сигнала могут быть непрерывными или дискретными. Сигнал считается непрерывным временным сигналом, если он определен по континууму независимой переменной. Сигнал считается дискретным по времени, если независимая переменная имеет только дискретные значения. Для многих практических приложений значения дискретного сигнала времени часто квантуются, чтобы получить числа, которые могут быть представлены для использования в цифровой схеме или системе.Квантованный сигнал с дискретным временем считается цифровым сигналом. Таким образом, если и независимые, и зависимые переменные определены только в дискретных значениях, то сигнал считается цифровым сигналом. Цифровые сигналы могут быть представлены как последовательность чисел конечной точности.
Сигналы играют важную роль во многих действиях в нашей повседневной жизни. Обычно встречаются такие сигналы, как речь, музыка, видео и т. Д. Сигнал является функцией независимой переменной, такой как время, расстояние, положение, температура и давление.Например, речь и музыка, которые мы слышим, представляют собой сигналы, представленные давлением воздуха в точке пространства как функцией времени. Ухо преобразует сигнал в форму, которую мозг может интерпретировать. Видеосигнал в телевизоре состоит из последовательности изображений, называемых кадрами, и каждый кадр можно рассматривать как изображение. Видеосигнал является функцией трех переменных: двух пространственных координат и времени.
Независимые переменные, такие как время, расстояние, температура и т. Д., Для многих сигналов, с которыми мы взаимодействуем ежедневно, можно считать непрерывными.Сигналы с непрерывными независимыми переменными считаются сигналами непрерывного времени. Достижения в области компьютерных технологий и технологий цифровых систем сделали возможным выборку и квантование многих из этих сигналов и их обработку с использованием цифровых схем и систем для практических приложений. Обработка сигналов с помощью компьютеров и других цифровых систем называется цифровой обработкой сигналов. Цифровая обработка сигналов включает в себя выборку, квантование и обработку этих сигналов для многих приложений, включая связь, обработку голоса, обработку изображений, цифровую связь, передачу данных через Интернет и различные виды сжатия данных.
Многие приложения, в которых используются сигналы непрерывного времени, реализованы с использованием цифровой обработки сигналов. Сигналы непрерывного времени квантуются и кодируются в цифровом формате для обработки цифровыми схемами и системами. Выходные данные этих цифровых систем затем либо сохраняются для дальнейшего использования, либо преобразуются в сигналы с непрерывным временем, чтобы соответствовать требованиям приложения. Существует множество причин, по которым цифровая обработка сигналов стала экономически эффективным подходом для реализации многих приложений, включая обработку речи, обработку и передачу видео, передачу сигналов по средствам связи, а также поиск и хранение данных.Некоторые из этих причин следуют [4]:
- 1.
-
Программируемая цифровая система обеспечивает гибкость для настройки системы для различных приложений. Алгоритм обработки можно изменить, изменив параметры системы или изменив порядок операций с помощью программного обеспечения. Реконфигурирование системы непрерывного времени часто означает перепроектирование системы и изменение или модификацию ее компонентов.
- 2.
-
Допуски для компонентов непрерывного времени или аналоговой системы затрудняют разработчикам контроль точности выходного сигнала.С другой стороны, точность выходного сигнала для цифровой системы предсказуема и управляема типом используемой арифметики и количеством битов, используемых в вычислениях.
- 3.
-
Цифровые сигналы могут храниться в цифровых компьютерах, на дисках или других носителях данных без потери точности, кроме той, которая достигается путем получения сигнала с помощью некоторого процесса, такого как преобразование непрерывного сигнала времени в цифровой сигнал . Носители данных для сигналов с непрерывным временем склонны к потере точности сигнала с течением времени и / или к добавлению шума из-за окружающей среды.
- 4.
-
Цифровая реализация позволяет легко разделять данный процессор между несколькими сигналами посредством разделения времени. Несколько цифровых сигналов могут быть объединены в один с помощью мультиплексирования. Затем мультиплексированный сигнал может обрабатываться одним процессором по мере необходимости для конкретного приложения. Соответствующие отдельные выходы затем могут быть отделены от выхода цифровой системы, при этом результаты будут такими же, как если бы сигналы обрабатывались разными системами.Это позволяет использовать одну высокоскоростную цифровую систему для обработки нескольких различных цифровых сигналов с относительно низкими частотами дискретизации.
- 5.
-
Цифровая обработка сигналов может использоваться для простой обработки очень низкочастотных сигналов, таких как сейсмические сигналы. Непрерывная временная обработка этих сигналов потребует очень больших компонентов, таких как большие конденсаторы и / или большие катушки индуктивности.
- 6.
-
Стоимость внедрения цифровых систем часто очень низкая из-за производства большого количества микропроцессоров или микрочипов единой конструкции.Это сделало очень рентабельным внедрение цифровых систем, которые могут быть изготовлены в больших количествах.
- 7.
-
Шифрование может использоваться для обеспечения безопасности цифровых сигналов. Это важно для безопасности в Интернете, а также для безопасности беспроводной связи и защиты личных данных.
Есть некоторые недостатки, связанные с цифровой обработкой сигналов:
- 1.
-
Система цифровой обработки сигнала для конкретного приложения часто более сложна, чем соответствующая система обработки аналогового сигнала.
- 2.
-
Верхняя частота, которая может быть представлена для цифровых систем, определяется частотой дискретизации. Таким образом, системы непрерывного времени все еще используются для многих высокочастотных приложений.
- 3.
-
Цифровые системы используют активные цепи, потребляющие энергию. Аналоговые системы могут быть спроектированы с использованием пассивных цепей, что может привести к созданию системы, потребляющей меньше энергии, чем соответствующая цифровая система.
Дискретная обработка сигналов времени используется во многих приложениях, относящихся к категории информационных технологий.Информационные технологии включают в себя такие разнообразные предметы, как обработка речи, обработка изображений, мультимедийные приложения, вычислительная техника, визуализация данных, управление базами данных, телеконференции, удаленное управление роботами, автономные транспортные средства, компьютерные сети, моделирование и моделирование физических систем и т. Д. Информационные технологии , который в значительной степени основан на использовании концепций цифровой обработки сигналов, необходим для решения важнейших национальных проблем в таких областях, как фундаментальная наука и инженерия, окружающая среда, здравоохранение и правительственные операции.
Что такое аналоговые и цифровые сигналы и их различия
Аналоговые и цифровые сигналы — это разные типы, которые в основном используются для передачи данных от одного устройства к другому. Аналоговые сигналы — это непрерывные волновые сигналы, которые меняются с периодом времени, тогда как цифровые — это дискретные сигналы по своей природе. Основное различие между аналоговыми и цифровыми сигналами заключается в том, что аналоговые сигналы представлены синусоидальными волнами, тогда как цифровые сигналы представлены прямоугольными волнами.Обсудим различие аналоговых и цифровых сигналов. Лучший пример аналогового и цифрового — это электроны, потому что он работает как с аналоговыми, так и с цифровыми сигналами, входами и выходами. В некотором роде проект электроники в основном взаимодействует с реальным аналоговым миром, тогда как цифровые сигналы — с компьютерами, микропроцессорами и логическими устройствами. Эти два вида сигналов похожи на разные электронные языки. Поскольку некоторые другие языки могут распознавать и говорить только на одном из двух.В этой статье обсуждается обзор как аналоговых, так и цифровых сигналов, а также их сравнение. Пожалуйста, обратитесь по ссылке, чтобы узнать о разнице между аналоговой и цифровой схемой
Что такое аналоговый и цифровой сигнал?
Аналоговый сигнал — это один из типов непрерывных изменяющихся во времени сигналов, которые подразделяются на составные и простые сигналы. Простой тип аналогового сигнала — это не что иное, как синусоида, и ее нельзя разложить, тогда как аналоговый сигнал составного типа можно разложить на множество синусоид.Аналоговый сигнал может быть определен с помощью амплитуды, периода времени или частоты и фазы. Амплитудные полосы — это самая высокая высота сигнала, частотные полосы — скорость, с которой изменяется аналоговый сигнал, а фазовые полосы — положение сигнала относительно времени — ничего. Следовательно, аналоговый сигнал не устойчив к шуму; он сталкивается с искажениями, а также снижает качество передачи. Диапазон значений аналогового сигнала не может быть зафиксирован.
Аналоговый сигнал
Подобно аналоговому, цифровые сигналы несут данные, хотя они немного отличаются.Эти сигналы бывают дискретными или непостоянными. Цифровой сигнал передает данные в двоичной форме, потому что он обозначается битами. Эти сигналы можно разложить на синусоидальные волны, которые называются гармониками. Каждый цифровой сигнал имеет амплитуду, частоту и фазу, как аналоговый сигнал. Этот сигнал может определяться битовым интервалом, а также битовой скоростью. Здесь битовый интервал — это не что иное, как необходимое время для передачи единственного бита, тогда как битовая скорость — это частота битового интервала.
Цифровой сигналЦифровые сигналы более устойчивы к шумам; поэтому он практически не искажается.Эти волны просты в передаче, а также более надежны по сравнению с аналоговыми волнами. Цифровые сигналы включают ограниченное количество значений, которые лежат в диапазоне от 0 до 1. Чтобы узнать , как аналоговый сигнал преобразуется в цифровой, , пожалуйста, обратитесь по ссылке: Как преобразовать аналоговый сигнал в цифровой с помощью преобразователя АЦП
Характеристики аналоговых и цифровых сигналов
Характеристики аналоговых и цифровых сигналов в основном включают адаптируемость , непрерывность, представление, тип данных, тип сигнала, среда передачи, тип значений, безопасность, полоса пропускания, оборудование, хранение данных, переносимость, передача данных, импеданс, энергопотребление, запись данных, использование, скорость передачи данных, примеры и Приложения.
Адаптивность
Аналоговые сигналы менее настраиваются для диапазона использования, тогда как цифровые сигналы более настраиваются для диапазона использования.
Непрерывность
Аналоговые сигналы используют непрерывное множество значений амплитуды, тогда как цифровой сигнал принимает ограниченный набор различных значений в последовательно расположенных точках времени.
Тип данных
Аналоговые сигналы имеют непрерывный характер, тогда как цифровые сигналы дискретны.
Тип волн
Тип волны аналогового сигнала — синусоидальный, тогда как цифровой сигнал — прямоугольный.
Среда передачи
Среда передачи аналогового сигнала — проводная или беспроводная, тогда как цифровой сигнал — провод.
Тип значений
Тип значения аналогового сигнала как положительный, так и отрицательный, тогда как цифровой сигнал положительный.
Безопасность
Безопасность аналогового сигнала не шифруется, тогда как цифровой сигнал шифруется.
Полоса пропускания
Полоса пропускания аналогового сигнала низкая, а цифрового сигнала высокая.
Аппаратное обеспечение
Аппаратное обеспечение аналогового сигнала не эластично, тогда как цифровое — эластичное в исполнении
Хранение данных
Хранение данных аналогового сигнала осуществляется в форме волнового сигнала, тогда как цифровой сигнал сохраняет данные в двоичная битовая форма.
Портативность
Аналоговые сигналы портативны, как термометр, и имеют низкую стоимость, тогда как цифровые сигналы портативны, как компьютеры, и дороги.
Передача данных
В аналоговом режиме сигнал может ухудшаться из-за шума на протяжении всей передачи, тогда как цифровой сигнал может быть устойчивым к шумам на протяжении всей передачи без какого-либо ухудшения.
Импеданс
Импеданс аналогового сигнала низкий, а цифрового сигнала высокий.
Энергопотребление
Аналоговые устройства потребляют больше энергии, тогда как цифровые устройства потребляют меньше энергии.
Скорость передачи данных
Скорость передачи данных в аналоговом сигнале низкая, тогда как в цифровом сигнале она выше.
Примеры
Лучшими примерами аналогового сигнала являются видео, человеческий голос в эфире, волны радиопередачи или волны передачи TV
.
Приложения
Аналоговые сигналы могут использоваться исключительно в аналоговых устройствах, термометрах, тогда как цифровые сигналы подходят для цифровых электронных устройств, таких как компьютеры, КПК, сотовые телефоны.
Ключевые различия между аналоговыми и цифровыми сигналами
Ключевые различия между аналоговыми и цифровыми сигналами в табличной форме показаны ниже.
| Аналоговый сигнал | Цифровой сигнал |
| Аналоговый сигнал означает непрерывный сигнал, который сохраняет изменения в течение определенного периода времени.
| Цифровой сигнал означает дискретный сигнал, который несет двоичные данные и имеет дискретные значения.
|
| Аналоговые сигналы представляют собой непрерывные синусоиды
| Цифровые сигналы представляют собой прямоугольные волны.
|
| Аналоговые сигналы описывают поведение волны относительно амплитуды, периода времени и фазы сигнала.
| Цифровые сигналы описывают поведение сигнала в отношении скорости передачи бита, а также битового интервала.
|
| Диапазон аналогового сигнала не устанавливается.
| Цифровой сигнал ограничен, а также находится в диапазоне от 0 до 1.
|
| Аналоговый сигнал является более горизонтальным по направлению к искажению во время реакции на шум
| Цифровой сигнал имеет сопротивление в ответ на шум, поэтому он не часто сталкивается с искажениями.
|
| Аналоговый сигнал передает информацию в форме сигнала.
| Цифровой сигнал передает информацию в двоичной форме, то есть в битах.
|
| Пример аналогового сигнала — человеческий голос
| Примером цифрового сигнала является передача данных в компьютере.
|
Преимущества цифрового сигнала перед аналоговым
Использование цифрового сигнала перед аналоговым дает несколько преимуществ.
- Цифровые сигналы более безопасны, и они не повреждаются шумом.
- Эти сигналы используют узкую полосу пропускания
- Они позволяют передавать сигналы на большие расстояния.
- Цифровой сигнал имеет более высокую скорость передачи
- Используя эти сигналы, мы можем переводить сообщения, аудио и видео на язык устройства.
- Цифровые сигналы позволяют одновременную многонаправленную передачу.
Таким образом, разница между аналоговым и цифровым сигналами в табличной форме показана выше.Комбинация аналоговых и цифровых компонентов нередко встречается в схеме. Обычно микроконтроллеры — это цифровые звери, и они часто имеют внутреннюю схему, которая позволяет им соединяться с аналоговой схемой. АЦП (аналого-цифровой преобразователь) позволяет микроконтроллеру подключать аналоговый датчик для считывания аналогового напряжения. Меньшее количество обычных ЦАП позволяет микроконтроллеру генерировать аналоговые напряжения, что полезно всякий раз, когда это требует создания звука. Вот вам вопрос, какой сигнал лучше? аналоговый или цифровой сигнал?
Дискретный и аналоговый ввод / вывод для ПЛК
Так что вы думаете, этот стакан наполовину полон или наполовину пуст? Для меня это может быть немного сложно ответить и может варьироваться в зависимости от дня, который у меня есть, но если мы спрашиваем об уровне, почему бы не позволить ПЛК ответить? На самом деле, почему бы ПЛК не сообщать нам уровень, температуру воды, скорость потока, с которой она была заполнена, доступную емкость стакана и давление, оказываемое на дно? Хорошо, обычно вы не будете использовать ПЛК для такого небольшого приложения, но в более крупном масштабе, например, резервуар, ПЛК может ответить на все эти вопросы.Но как заставить ПЛК «видеть» этот резервуар, не говоря уже о том, насколько он полон? Что ж, я рад, что ты спросил, или я спросил, или что-то в этом роде. Нам нужно устройство, которое может позволить ПЛК получать информацию из своего окружения и обрабатывать ее. Нам также нужно устройство, которое позволит ПЛК влиять на свое окружение по мере необходимости. Нам нужен ввод-вывод, а под вводом-выводом я подразумеваю вводы и выводы. В этом обсуждении мы сосредоточимся на двух основных типах ввода-вывода: аналоговом и дискретном.
Дискретный ввод / вывод
Давайте сначала возьмем самое простое, дискретное.Дискретные сигналы — это сигналы, которые либо включены, либо выключены, истинны или ложны. Подумайте о выключателе в вашем доме. Выключатель либо включает свет, либо выключает его, если это не люминесцентная лампа — тогда он, вероятно, все еще мигает. Поскольку дискретные сигналы существуют в одном из этих двух состояний, они представлены прямоугольной волной, как показано ниже. В мире ПЛК существует множество применений дискретного ввода-вывода. Некоторые из устройств, которые подают сигналы включения / выключения, — это кнопки, фотоэлементы, концевые выключатели, поплавковые выключатели и бесконтактные выключатели.В дни стартапа я много работал с определенной службой доставки посылок. Они используют множество датчиков включения / выключения и контроля, чтобы отслеживать посылки и доставлять их в нужное место назначения или на грузовик. Фотоэлементы, которые представляют собой устройства, которые излучают инфракрасный световой луч и могут определять, когда этот луч был прерван, широко используются для обнаружения и отслеживания пакетов в процессе их сортировки. Применение вашей системы управления определит типы дискретных устройств, которые вы выберете. Существует множество дискретных оконечных устройств и модулей, которые можно использовать в системе ПЛК для отправки и приема сигналов включения / выключения.Эти устройства могут быть переменного или постоянного тока и доступны в различных диапазонах напряжения. 0–24 В постоянного тока и 0–230 В переменного тока — это два доступных диапазона напряжения, где 0 — это сигнал ВЫКЛ, а 24 В постоянного тока или 230 В переменного тока — сигнал ВКЛ. Обычно существует порог обнаружения, при котором модуль 0-24 В постоянного тока обнаруживает все, что выше 22 В постоянного тока, как сигнал ВКЛ, и все, что ниже 2 В постоянного тока, как ВЫКЛ. Теперь давайте посмотрим на аналог.
Аналоговый ввод / вывод
Аналоговые сигналы — это сигналы, которые могут изменяться или изменяться. Мы живем в аналоговом мире, и наши чувства — аналоговые приемники.«Почувствуй, как жарко!», «Ты можешь говорить?» и «Посмотрите на все цвета!» это утверждения, которые показывают, как вариации аналоговых сигналов, таких как температура, звук и свет, могут влиять на наши чувства. Вернемся к примеру с выключателем света; Давайте теперь установим в нашем доме небольшую декоративную подсветку. Вместо штатного выключателя мы будем использовать диммер. Переключатель диммера будет изменять сопротивление в линии, заставляя свет тускнеть или становиться ярче по нашему выбору. Новые диммерные переключатели усовершенствованы, чтобы быть более эффективными, но в этом примере мы придерживаемся старой школы.Напряжение, подаваемое на светильник, не будет постоянным уровнем, а будет изменяться между верхним и нижним пределами. Обычно это синусоида.
Использование датчиков
Положение, уровень, температура, давление, расход и скорость — это лишь некоторые из измерений, которые аналоговые устройства могут предоставить системе управления. Вы, вероятно, спрашиваете себя: «Как давление, являющееся физической величиной, становится электрическим сигналом?» Это отличный вопрос! Преобразование выполняется с помощью преобразователей.Преобразователь принимает физическую величину, например давление, и преобразует ее в электрический сигнал. Многие преобразователи используют физическую величину для управления сопротивлением в электрической цепи. Например, RTD (датчик температуры сопротивления) будет изменять значение сопротивления в зависимости от нагрева. По мере увеличения тепла увеличивается и сопротивление в цепи, изменяя подаваемое напряжение или ток. То же самое верно и для датчиков давления, в которых используются тензодатчики. При приложении давления к тензодатчику сопротивление в цепи увеличивается, а уровень напряжения или тока изменяется.Некоторые детекторы потока будут использовать поток жидкости для толкания ребра, соединенного с поворотным потенциометром. Более быстрый поток означает большее изменение сопротивления. Одним из самых крутых датчиков, с которыми я столкнулся в дни работы в морской нефтяной промышленности, был детектор песка. Этот преобразователь был акустическим и крепился к трубам, по которым нефть выводилась со дна моря. Он действительно слышал, как песок трется о внутреннюю часть трубы. Уровень звука был преобразован в аналоговый сигнал, используемый для предупреждения персонала, если при бурении извлекается слишком много песка, что может привести к обрушению скважины.Электрические сигналы, которые выдают преобразователи, могут быть основаны на напряжении или токе. От 4 до 20 мА, от 0 до 20 мА, от 0 до 10 В постоянного тока и от -10 до +10 В постоянного тока — вот лишь некоторые из доступных диапазонов, производимых датчиками. ПЛК подает напряжение или ток, а датчик возвращает значение в заданном диапазоне. Это значение будет пропорционально имеющемуся давлению, расходу и т. Д. Теперь мы подошли к двум важным частям этого обсуждения: масштабированию и разрешению.
Масштабирование
Масштабирование — это когда мы берем необработанное возвращаемое значение напряжения или тока и преобразуем его в значимое измерение.Допустим, у меня есть расходомер 4–20 мА, который возвращает сигнал 8 мА на ПЛК. Это будет означать, что в это время течет 8 мА жидкости, верно? Конечно нет. Нам нужно взять необработанное значение и масштабировать его до чего-то значимого, скажем, галлонов в минуту. Мы знаем от производителя, что расходомер откалиброван для считывания расхода от 0 до 200 галлонов в минуту. Следовательно, мы можем масштабировать исходное значение 4-20 мА до 0-200 галлонов в минуту в нашей системе. Обычно это можно сделать с помощью программного обеспечения для программирования, как показано ниже, и после масштабирования нашего значения 8 мА мы видим, что в настоящее время поток составляет 50 галлонов в минуту.
Разрешение
Теперь посмотрим на разрешение. Разрешение и точность идут рука об руку; Чем больше у вас разрешение, тем точнее будут ваши измерения. Аналоговые модули имеют разрешение, которое они обеспечивают. Доступны 12-битные, 13-битные и 16-битные разрешения. Итак, что значит иметь модуль 4-20 мА с 12-битным разрешением? 12-битное двоичное слово может иметь 4096 различных комбинаций. Следовательно, наш модуль с 12-битным разрешением может иметь 4096 (4095 со знаком) различных измерений в диапазоне 4-20 мА.Другими словами, диапазон 4-20 можно разбить на 4096 различных частей. Чем больше штук, тем точнее. Насколько точно? Что ж, наш общий диапазон составляет 16 мА (20 минус 4), и если мы разделим наш общий диапазон на 4096 частей, мы увидим, что наш модуль может обнаруживать каждые 0,003
мА изменения.
Шум
И последнее: при использовании аналоговых сигналов важно помнить, что они очень чувствительны к шуму. Шум может вызвать неправильные показания и неустойчивое поведение системы управления. Взгляните на схему ниже.Моя система откроет предохранительный клапан на резервуаре, когда необработанный сигнал давления изнутри резервуара достигнет 5,9 В постоянного тока. С ответным сигналом слева это не проблема. Удачи с наведенным справа шумом! Если вам нужна дополнительная информация об автоматизации или процессе автоматизации, загрузите нашу электронную книгу «Автоматизация 101: отраслевое руководство по проектированию систем управления».
Сигналы и системы
Сигнал — это описание того, как один параметр изменяется с другим параметром.Например, изменение напряжения в электронной схеме во времени или яркость меняется в зависимости от расстояния на изображении. Система — это любой процесс, производящий Выходной сигнал в ответ на входной сигнал . Это иллюстрируется блоком диаграмму на рис. 5-1. Системы непрерывного ввода и вывода непрерывных сигналов, например, в аналоговой электронике. Дискретные системы ввода и вывода дискретные сигналы, такие как компьютерные программы, которые манипулируют значениями, хранящимися в массивах.
Для присвоения имен сигналам используется несколько правил. Это не всегда выполняется в DSP, но они очень распространены, и вы должны их запомнить. Математика достаточно сложно без четких обозначений. Во-первых, непрерывных сигналов используют круглые скобки, например: x (t) и y (t) , а для дискретных сигналов используются скобки, например: x [n] и y [n] . Во-вторых, в сигналах используются строчные буквы. Буквы верхнего регистра зарезервирован для частотной области, обсуждаемой в следующих главах.В-третьих, имя передаваемый сигналу обычно описывает параметры, которые он представляет. Для Например, напряжение в зависимости от времени может называться: v (t) или фондовый рынок цена измеряется каждые дней может быть: p [d] .
Сигналы и системы часто обсуждаются, не зная точного представляемые параметры. Это то же самое, что использовать x и y в алгебре, без присвоения физического смысла переменным.Это приносит четвертый правило именования сигналов. Если более информативное имя недоступно, ввод сигнал дискретной системы обычно называется: x [n] , а выходной сигнал: y [n] . Для непрерывных систем используются сигналы: x (t) и y (t) .
Есть много причин для понимания системы . Например, вы может захотеть спроектировать систему для удаления шумов на электрокардиограмме, повышения резкости изображение не в фокусе или удаление эха в аудиозаписи.В остальных случаях система может иметь искажение или мешающий эффект, который вам необходимо охарактеризовать или измерить. Например, когда вы говорите по телефону, вы ожидайте, что другой человек услышит что-то похожее на ваш голос. К сожалению, входной сигнал линии передачи редко бывает идентичным выходной сигнал. Если вы понимаете, как устроена линия передачи (система) изменяя сигнал, возможно, вы сможете компенсировать его влияние. В еще других случаях система может представлять собой некоторый физический процесс, который вы хотите изучить или проанализировать.Радар и гидролокатор — хорошие тому примеры. Эти методы работают сравнивая передаваемые и отраженные сигналы, чтобы найти характеристики удаленный объект. С точки зрения теории систем проблема состоит в том, чтобы найти систему который преобразует переданный сигнал в полученный.
На первый взгляд может показаться непосильной задачей понять все возможные системы в мире. К счастью, большинство полезных систем попадают в категория называется линейными системами.Этот факт чрезвычайно важен. Без концепция линейной системы, мы были бы вынуждены исследовать отдельные характеристики многих несвязанных систем. При таком подходе мы можем сосредоточиться на черты линейной системы категории в целом. Наша первая задача — выявить какие свойства делают систему линейной и как они вписываются в повседневное понятие электроники, программного обеспечения и других систем обработки сигналов.
Разница между дискретными и непрерывными данными (со сравнительной таблицей)
Последнее обновление: , автор: Surbhi S
В статистике данные определяются как факты и цифры, собранные вместе с целью анализа.Он разделен на две большие категории: качественные данные и количественные данные. Кроме того, качественные данные не могут быть измерены в числах, и они подразделяются на номинальные и порядковые данные. С другой стороны, количественные данные — это данные, содержащие числовые значения и использующие диапазон. Он подразделяется на дискретные и непрерывные данные. Дискретные данные содержат конечные значения, не имеющие ничего промежуточного между
В отличие от непрерывные данные содержат данные, которые можно измерить, включая дробные и десятичные дроби.Прочтите статью, чтобы узнать разницу между дискретными и непрерывными данными
Содержимое: дискретные данные против непрерывных данных
- Сравнительная таблица
- Определение
- Ключевые отличия
- Заключение
Сравнительная таблица
| Основа для сравнения | Дискретные данные | Непрерывные данные |
|---|---|---|
| Значение | Дискретные данные — это данные, между значениями которых есть пустые промежутки. | Непрерывные данные — это данные, которые попадают в непрерывную последовательность. |
| Природа | Счетный | Счетный |
| Значения | Может принимать только различные или отдельные значения. | Может принимать любое значение в некотором интервале. |
| Графическое представление | Гистограмма | Гистограмма |
| Таблица известна как | Несгруппированное частотное распределение. | Сгруппированное частотное распределение. |
| Классификация | Взаимоисключающие | Взаимоисключающие |
| Функциональный график | Показывает изолированные точки | Показывает соединенные точки |
| Пример | Дни недели | Рыночная цена товара |
Определение дискретных данных
Термин дискретный означает отдельный или отдельный. Итак, дискретные данные относятся к типу количественных данных, основанных на подсчетах.Он содержит только конечные значения, разделение которых невозможно. Он включает только те значения, которые можно считать только целыми числами или целыми числами и которые являются отдельными, что означает, что данные не могут быть разбиты на дробные или десятичные числа.
Например, Количество учеников в школе, количество машин на стоянке, количество компьютеров в компьютерном классе, количество животных в зоопарке и т. Д.
Определение непрерывных данных
Непрерывные данные описываются как непрерывный набор наблюдений; что можно измерить по шкале.Может принимать любое числовое значение в пределах конечного или бесконечного диапазона возможных значений. Статистически диапазон относится к разнице между самым высоким и самым низким показателем. Непрерывные данные могут быть разбиты на дроби и десятичные числа, то есть их можно разумно разделить на более мелкие части в соответствии с точностью измерения.
Например, Возраст, рост или вес человека, время, необходимое для выполнения задачи, температура, время, деньги и т. Д.
Ключевые различия между дискретными и непрерывными данными
Разницу между дискретными и непрерывными данными можно ясно увидеть по следующим причинам:
- Дискретные данные — это тип данных с пустыми пробелами между значениями.Непрерывные данные — это данные, которые находятся в непрерывной последовательности.
- Дискретные данные можно считать, а непрерывные данные можно измерить.
- Дискретные данные содержат различные или отдельные значения. С другой стороны, непрерывные данные включают любое значение в пределах диапазона.
- Дискретные данные графически представлены гистограммой, тогда как гистограмма используется для графического представления непрерывных данных.
- Табулирование дискретных данных, сделанное для одного значения, называется несгруппированным частотным распределением.Напротив, табулирование непрерывных данных, сделанное для группы значений, называется сгруппированным частотным распределением.
- Перекрывающаяся или взаимоисключающая классификация, такая как 10-20, 20-30, .. и т. Д., Выполняется для непрерывных данных. В отличие от дискретных данных, неперекрывающаяся или взаимно включающая классификация, такая как 10-19,20-29,…. И т. Д., Выполняется для дискретных данных.
- На графике дискретной функции показана отдельная точка, которая остается несвязанной. В отличие от непрерывного функционального графика, точки соединены непрерывной линией
Заключение
Следовательно, с приведенным выше объяснением и примером будет совершенно ясно, что эти два типа данных различаются.Дискретные данные предполагают определенное количество изолированных значений. В отличие от непрерывных данных, которые ожидают любое значение из заданного диапазона (без каких-либо перерывов) и связаны с физическим измерением.
Основные понятия
10.1.0 Основные понятия
В реальных приложениях нас часто интересуют множественные наблюдения случайных величин в течение определенного периода времени. Например, предположим, что вы наблюдаете за курсом акций компании в течение следующих нескольких месяцев.В частности, пусть $ S (t) $ — цена акции в момент $ t \ in [0, \ infty) $. Здесь мы предполагаем, что $ t = 0 $ относится к текущему времени. На рисунке 10.1 показан возможный результат этого случайного эксперимента с момента $ t = 0 $ до момента $ t = 1 $. Рисунок 10.1 — Возможная реализация наблюдаемых значений запаса как функции времени. Здесь $ S (t) $ — пример случайного процесса. Обратите внимание, что в любой фиксированный момент времени $ t_1 \ in [0, \ infty) $, $ S (t_1) $ является случайной величиной. Основываясь на ваших финансовых знаниях и исторических данных, вы можете предоставить PDF-файл за $ S (t_1) $.Если вы выберете другое время $ t_2 \ in [0, \ infty) $, вы получите другую случайную переменную $ S (t_2) $, которая потенциально может иметь другой PDF-файл. Когда мы рассматриваем значения $ S (t) $ для $ t \ in [0, \ infty) $ вместе, мы говорим, что $ S (t) $ — это случайный процесс или случайный процесс . Мы можем показать этот процесс \ begin {align}% \ label {} \ big \ {S (t), t \ in [0, \ infty) \ big \}. \ end {align} Следовательно, случайный процесс — это набор случайных величин, обычно индексированных по времени (или иногда по пространству).Случайный процесс — это набор случайных величин, обычно индексированных временем.
Упомянутый здесь процесс $ S (t) $ является примером случайного процесса с непрерывным временем . В общем, когда у нас есть случайный процесс $ X (t) $, где $ t $ может принимать действительные значения в интервале на реальной прямой, тогда $ X (t) $ — это случайный процесс с непрерывным временем. Вот еще несколько примеров случайных процессов в непрерывном времени:- $ — $ Пусть $ N (t) $ будет количеством клиентов, которые посетили банк от $ t = 9 $ (когда банк открывается в 9:00) до времени $ t $ в данный день, для $ t \ in [9,16] $.Здесь мы измеряем $ t $ в часах, но $ t $ может принимать любое реальное значение от 9 до 16 долларов. Мы предполагаем, что $ N (9) = 0 $ и $ N (t) \ in \ {0,1,2, … \} $ для всех $ t \ in [9,16] $. Обратите внимание, что в любое время $ t_1 $ случайная величина $ N (t_1) $ является дискретной случайной величиной. Таким образом, $ N (t) $ — это дискретных случайных процесса из . Однако, поскольку $ t $ может принимать любое действительное значение от 9 до 16 $, $ N (t) $ — это случайный процесс с непрерывным временем.
- $ — $ Пусть $ W (t) $ будет напряжением теплового шума, генерируемым на резисторе в электрической цепи в момент $ t $ для $ t \ in [0, \ infty) $.Здесь $ W (t) $ может принимать действительные значения.
- $ — $ Пусть $ T (t) $ будет температурой в Нью-Йорке в момент времени $ t \ in [0, \ infty) $. Здесь мы можем предположить, что $ t $ измеряется в часах, а $ t = 0 $ относится к моменту начала измерения температуры.
С другой стороны, у вас может быть случайных дискретных процессов. Случайный процесс с дискретным временем — это процесс
\ begin {align}% \ label {} \ big \ {X (t), t \ in J \ big \}, \ end {align} где $ J $ — счетное множество.Поскольку $ J $ счетно, мы можем написать $ J = \ {t_1, t_2, \ cdots \} $. Обычно мы определяем $ X (t_n) = X (n) $ или $ X (t_n) = X_n $ для $ n = 1,2, \ cdots $, (значения индекса $ n $ могут быть из любого счетного множества, такого как $ \ mathbb {N} $ или $ \ mathbb {Z} $). Следовательно, случайный процесс с дискретным временем — это просто последовательность случайных величин. По этой причине случайные процессы с дискретным временем иногда называют случайными последовательностями . Мы можем обозначить такой процесс с дискретным временем как \ begin {align}% \ label {} \ big \ {X (n), n = 0,1,2, \ dots \} \ quad \ textrm {или} \ quad \ big \ {X_n, n = 0,1,2, \ dots \}.\ end {align} Или, если процесс определен для всех целых чисел, мы можем показать процесс как \ begin {align} \ big \ {X (n), n \ in \ mathbb {Z} \} \ quad \ textrm {или} \ quad \ big \ {X_n, n \ in \ mathbb {Z} \}. \ end {align} Вот пример случайного процесса с дискретным временем. Предположим, что мы наблюдаем клиентов, которые посещают банк, начиная с определенного времени. Пусть $ X_n $ для $ n \ in \ mathbb {N} $ будет временем, которое $ i $ -й клиент проводит в банке. Этот процесс состоит из счетного числа случайных величин. \ begin {align}% \ label {} X_1, X_2, X_3 ,… \ end {align} Таким образом, мы говорим, что процесс $ \ big \ {X_n, n = 1,2,3 .. \ big \} $ является случайным процессом с дискретным временем. Процессы с дискретным временем иногда получают из процессов с непрерывным временем путем дискретизации времени (выборки в определенное время). Например, если вы регистрируете температуру в Нью-Йорке только один раз в день (скажем, в полдень), вы можете определить процесс. \ begin {align}% \ label {} & X_1 = T (12) & \ textrm {(температура в полдень 1-го дня, $ t = 12 $)} \\ & X_2 = T (36) & \ textrm {(температура в полдень второго дня, $ t = 12 + 24 $)} \\ & X_3 = T (60) & \ textrm {(температура в полдень третьего дня, $ t = 12 + 24 + 24 $)} \\ &… \ end {align} И вообще $ X_n = T (t_n) $, где $ t_n = 24 (n-1) + 12 $ для $ n \ in \ mathbb {N} $. Здесь $ X_n $ — случайный процесс с дискретным временем. На рисунке 10.2 показана возможная реализация этого случайного процесса. Рисунок 10.2 — Возможная реализация случайного процесса $ \ big \ {X_n, n = 1,2,3, \ cdots \ big \} $, где $ X_n $ показывает температуру в Нью-Йорке в полдень в день $ n $.Случайный процесс с непрерывным временем — это случайный процесс $ \ big \ {X (t), t \ in J \ big \} $, где $ J $ — интервал на вещественной прямой, такой как $ [- 1, 1] $, $ [0, \ infty) $, $ (- \ infty, \ infty) $ и т. Д.
Случайный процесс с дискретным временем (или случайная последовательность ) — это случайный процесс $ \ big \ {X (n) = X_n, n \ in J \ big \} $, где $ J $ — счетное множество например $ \ mathbb {N} $ или $ \ mathbb {Z} $.
Случайные процессы как случайные функции:
Рассмотрим случайный процесс $ \ big \ {X (t), t \ in J \ big \} $. Этот случайный процесс является результатом случайного эксперимента, например, наблюдения за курсами акций компании в течение определенного периода времени. Помните, что любой случайный эксперимент определяется на пространстве отсчетов $ S $.Наблюдая за значениями $ X (t) $, мы получаем функцию времени, подобную той, что показана на рисунке 10.1. Функция, показанная на этом рисунке, — лишь один из многих возможных результатов этого случайного эксперимента. n, \ quad \ textrm {для} n = 0,1,2, \ cdots.\ end {align} Значение $ R $ — это случайная величина, которая определяется, когда вы кладете деньги в банк, но после этого не меняется. В частности, предположим, что $ R \ sim Uniform (0.04,0.05) $.- Найдите все возможные функции выборки для случайного процесса $ \ big \ {X_n, n = 0,1,2, … \ big \} $.
- Найдите ожидаемую стоимость вашего счета на третий год. То есть найти $ E [X_3] $.
- Решение
-
- Здесь случайность в $ X_n $ происходит от случайной величины $ R $.4 \ bigg] \\ & \ около 1141,2 \ end {align}
-
Пример
Пусть $ \ big \ {X (t), t \ in [0, \ infty) \ big \} $ определяется как \ begin {align}% \ label {} X (t) = A + Bt, \ quad \ textrm {для всех} t \ in [0, \ infty), \ end {align} где $ A $ и $ B $ — независимые нормальные $ N (1,1) $ случайные величины.
- Найдите все возможные функции выборки для этого случайного процесса.
- Определите случайную величину $ Y = X (1) $. Найдите PDF-файл $ Y $.
- Пусть также $ Z = X (2) $.Найдите $ E [YZ] $.
- Решение
-
- Здесь мы отмечаем, что случайность в $ X (t) $ происходит от двух случайных величин $ A $ и $ B $. Случайная величина $ A $ может принимать любое действительное значение $ a \ in \ mathbb {R} $. Случайная величина $ B $ также может принимать любое действительное значение $ b \ in \ mathbb {R} $. Как только мы узнаем значения $ A $ и $ B $, станет известен весь процесс $ X (t) $. В частности, если $ A = a $ и $ B = b $, то \ begin {align}% \ label {} X (t) = a + bt, \ quad \ textrm {для всех} t \ in [0, \ infty).\ end {align} Таким образом, здесь примерные функции имеют вид $ f (t) = a + bt $, $ t \ geq 0 $, где $ a, b \ in \ mathbb {R} $. Для любых $ a, b \ in \ mathbb {R} $ вы получаете пример функции для случайного процесса $ X (t) $.
- У нас есть \ begin {align}% \ label {} Y = X (1) = А + В. \ end {align} Поскольку $ A $ и $ B $ являются независимыми случайными величинами $ N (1,1) $, $ Y = A + B $ также является нормальным с \ begin {align}% \ label {} EY & = E [A + B] \\ & = E [A] + E [B] \\ & = 1 + 1 \\ & = 2, \ end {align} \ begin {align}% \ label {} \ textrm {Var} (Y) & = \ textrm {Var} (A + B) \\ & = \ textrm {Var} (A) + \ textrm {Var} (B) \ quad (\ textrm {поскольку $ A $ и $ B $ независимы}) \\ & = 1 + 1 \\ & = 2.2] \\ & = 2 + 3E [A] E [B] +2 \ cdot2 \ quad (\ textrm {поскольку $ A $ и $ B $ независимы}) \\ & = 9. \ end {align}
-
Случайные процессы в приведенных выше примерах были относительно простыми в том смысле, что случайность в процессе происходила от одной или двух случайных величин. Позже мы увидим более сложные примеры.
Разница между аналоговой и цифровой связью
Разница между аналоговой и цифровой связью
1.Аналоговая связь:
При аналоговой связи данные передаются с помощью аналогового сигнала между передатчиком и приемником. Любой тип данных передается в аналоговом сигнале. Любые данные сначала преобразуются в электрическую форму, а затем передаются по каналу связи. Аналоговая связь использует непрерывный сигнал, который изменяется по амплитуде, фазе или некоторым другим свойствам со временем пропорционально параметрам переменной.
На следующем рисунке показана аналоговая система связи :
2.Цифровая связь:
В цифровой связи для связи между источником и получателем используется цифровой сигнал, а не аналоговый сигнал. Их цифровой сигнал состоит из дискретных значений, а не непрерывных значений. При цифровой связи физическая передача данных происходит в форме цифрового битового потока, то есть 0 или 1 по среде передачи точка-точка или точка-множество точек. В цифровой связи данные цифровой передачи могут быть разбиты на пакеты в виде дискретных сообщений, что недопустимо в аналоговой связи.
На приведенном ниже рисунке показана система цифровой связи :
Разница между аналоговой и цифровой связью:
| S.No. | АНАЛОГОВАЯ СВЯЗЬ | ЦИФРОВАЯ СВЯЗЬ |
|---|---|---|
| 01. | В аналоговой связи аналоговый сигнал используется для передачи информации. | В цифровой связи для передачи информации используется цифровой сигнал. |
| 02. | Аналоговая связь использует аналоговый сигнал, амплитуда которого непрерывно изменяется во времени от 0 до 100. | Цифровая связь использует цифровой сигнал, амплитуда которого имеет два уровня: низкий, то есть 0, либо высокий, то есть 1. |
| 03. | На него сильно влияет шум во время передачи по каналу связи. | Он меньше подвержен влиянию шума при передаче по каналу связи. |
| 04. | При аналоговой связи одновременно может транслироваться только ограниченное количество каналов. | Он может транслировать большое количество каналов одновременно. |
| 05. | Ошибка аналоговой связи Вероятность высокой. | Ошибка цифровой связи Вероятность низкая. |
| 06. | В аналоговой связи помехозащищенность низкая. | В цифровой связи помехозащищенность хорошая. |
| 07. | В аналоговой связи кодирование невозможно. | В цифровой связи возможно кодирование. Для обнаружения и исправления ошибок могут использоваться различные методы кодирования. |
| 08. | Разделение шума и сигнала при аналоговой связи невозможно. | Возможно разделение шума и сигнала при цифровой связи. |
| 09. | Аналоговая система связи имеет сложное оборудование и менее гибкая. | Цифровая система связи имеет менее сложное оборудование и более гибкое. |
| 10. | В аналоговой связи для мультиплексирования используется мультиплексирование с частотным разделением (FDM).
| В цифровой связи для мультиплексирования используется мультиплексирование с временным разделением (TDM). Похожие записи
|