Какие существуют виды сил в механике. Как классифицируются силы на активные и реактивные. В чем заключаются основные свойства активных и реактивных сил. Как применяются активные и реактивные силы при решении задач механики.
Классификация сил в механике
В механике силы, действующие на тела и системы тел, классифицируются по нескольким основным критериям:
- По отношению к рассматриваемой системе:
- Внешние силы — действуют на тела системы со стороны тел, не входящих в систему
- Внутренние силы — силы взаимодействия между телами внутри системы
- По характеру действия:
- Активные (заданные) силы — задаются независимо от движения системы
- Реактивные силы (реакции связей) — возникают как следствие наложенных на систему связей
- По распределению:
- Сосредоточенные силы — приложены в точке
- Распределенные силы — приложены по линии, поверхности или объему
Важно отметить, что классификации по разным критериям независимы друг от друга. Например, активные силы могут быть как внешними, так и внутренними. Аналогично, реакции связей также могут быть внешними или внутренними по отношению к рассматриваемой системе.
Основные свойства активных и реактивных сил
Активные и реактивные силы обладают рядом характерных свойств, которые важно учитывать при решении задач механики:
Свойства активных сил:
- Не зависят от реакций связей и движения системы
- Задаются изначально как исходные данные задачи
- Могут совершать работу на любых перемещениях системы
- Входят в уравнения движения системы явным образом
Свойства реактивных сил (реакций связей):
- Возникают как следствие наложенных на систему связей
- Зависят от активных сил и характера движения системы
- Не совершают работы на возможных перемещениях системы (для идеальных связей)
- Часто являются неизвестными величинами, которые требуется определить
Роль активных и реактивных сил в уравнениях механики
Активные и реактивные силы по-разному входят в основные уравнения механики:
Уравнения динамики:
В уравнениях движения системы активные силы входят явным образом, а реакции связей — в виде неопределенных множителей Лагранжа:
miai = Fia + Ri
где mi — масса i-той точки, ai — ее ускорение, Fia — активная сила, Ri — реакция связи.
Уравнения статики:
В условиях равновесия системы активные силы и реакции связей входят одинаковым образом:
∑Fia + ∑Ri = 0
∑M(Fia) + ∑M(Ri) = 0
где ∑F — главный вектор сил, ∑M — главный момент сил.
Применение активных и реактивных сил в задачах механики
Разделение сил на активные и реактивные играет важную роль при решении различных задач механики:
Определение реакций связей:
В задачах на равновесие систем тел необходимо определить неизвестные реакции связей, используя уравнения статики. При этом активные силы считаются заданными.
Принцип освобождаемости от связей:
Позволяет заменить связи их реакциями и рассматривать несвободную систему как свободную под действием активных сил и реакций связей.
Принцип возможных перемещений:
В формулировке этого принципа используется тот факт, что идеальные связи не совершают работы на возможных перемещениях системы.
Общее уравнение динамики:
Позволяет составить уравнения движения системы, не определяя заранее реакции связей.
Внутренние силы в механических системах
Особую роль в механике играют внутренние силы — силы взаимодействия между частями рассматриваемой системы. Внутренние силы обладают рядом важных свойств:
- Являются парными — подчиняются третьему закону Ньютона
- Их главный вектор и главный момент равны нулю для системы в целом
- Не влияют на движение центра масс системы
- Могут изменять конфигурацию системы и вызывать ее вращение
При этом внутренние силы могут быть как активными, так и реактивными (например, силы упругости в деформируемых телах).
Учет сил трения в механических системах
Отдельного рассмотрения заслуживают силы трения, возникающие при относительном движении контактирующих тел:
- Силы трения могут быть как внешними, так и внутренними
- По характеру действия силы трения относят к реактивным силам
- В отличие от реакций идеальных связей, силы трения совершают работу
- Направление сил трения зависит от относительной скорости движения тел
Учет сил трения существенно усложняет решение задач механики, но позволяет более точно описать поведение реальных механических систем.
Применение теорем о движении центра масс и об изменении кинетического момента
Классификация сил на активные и реактивные, а также на внешние и внутренние позволяет эффективно применять общие теоремы динамики для анализа движения механических систем:
Теорема о движении центра масс:
Утверждает, что центр масс системы движется как материальная точка под действием главного вектора внешних сил:
Mac = ∑Fe
где M — масса системы, ac — ускорение центра масс, ∑Fe — главный вектор внешних сил.
Теорема об изменении кинетического момента:
Связывает изменение кинетического момента системы с главным моментом внешних сил:
dK/dt = ∑Me
где K — кинетический момент системы, ∑Me — главный момент внешних сил.
Важно отметить, что в обеих теоремах учитываются только внешние силы (как активные, так и реактивные), а внутренние силы не оказывают прямого влияния на движение системы в целом.
Читать книгу «Техническая механика. Шпаргалка» онлайн полностью📖 — Аурики Луковкиной — MyBook.
1. Аксиомы и понятие силы статики
Теоретическая механика – это наука о механическом движении твердых материальных тел и их взаимодействии. Механическое движение понимается как перемещение тел в пространстве и во времени по отношению к другим телам, в частности, к Земле.
Статика изучает условия равновесия тел под действием сил.
Кинематика рассматривает движение тел как перемещение в пространстве; характеристики тел и причины, вызывающие движение, не рассматриваются.
Динамика изучает движение тел под действием сил.
Сила – это мера механического взаимодействия материальных тел между собой. Взаимодействие характеризуется величиной и направлением, т. е. сила – это величина векторная, характеризующаяся точкой приложения, направлением (линией действия), величиной (модулем).
Силы, действующие на тело (или систему сил), делят на внешние
Системой сил называют совокупность сил, действующих на тело.
Эквивалентная система сил – система сил, действующая так же, как заданная.
Уравновешенной (эквивалентной нулю) системой сил называется такая система, которая, будучи приложенной к телу, не изменяет его состояния.
Систему сил, действующих на тело, можно заменить одной равнодействующей, действующей так, как система сил.
Все теоремы и уравнения статики выводятся из нескольких исходных положений, называемых аксиомами.
Первая аксиома. Под действием уравновешивающей системы сил абсолютно твердое тело или материальная точка находятся в равновесии или движутся равномерно и прямолинейно (закон инерции).
Вторая аксиома. Две силы, равные по модулю и направленные по одной прямой в разные стороны, уравновешиваются.
Третья аксиома. Не нарушая механического состояния тела, можно добавить или убрать уравновешивающую систему сил (принцип отбрасывания системы сил, эквивалентной нулю).
Четвертая аксиома (правило параллелограмма сил). Равнодействующая двух сил, приложенных к одной точке, приложена к той же точке и является диагональю параллелограмма, построенного на этих силах как на сторонах.
Пятая аксиома. При взаимодействии тел всякому действию соответствует равное и противоположно направленное противодействие.
Следствие из второй и третьей аксиом. Силу, действующую на твердое тело, можно перемещать вдоль линии ее действия.
2. Связи и реакции связей
Все тела делятся на свободные и связанные.
Свободные тела – это тела, перемещение которых не ограничено.
Связанные тела – это тела, перемещение которых ограничено другими телами.
Тела, ограничивающие перемещение других тел, называют связями.
Силы, действующие от связей и препятствующие перемещению, называют реакциями связей. Реакция связи всегда направлена с той стороны, куда нельзя перемещаться.
Всякое связанное тело можно представить свободным, если связи заменить их реакциями (принцип освобождения от связей).
Связи делятся на несколько типов.
Связь – гладкая опора (без трения) – реакция опоры приложена в точке опоры и всегда направлена перпендикулярно опоре.
Гибкая связь (нить, веревка, трос, цепь) – груз подвешен на двух нитях. Реакция нити направлена вдоль нити от тела, при этом нить может быть только растянута.
Жесткий стержень – стержень может быть сжат или растянут. Реакция стержня направлена вдоль стержня. Стержень работает на растяжение или сжатие. Точное направление реакции определяют, мысленно убрав стержень и рассмотрев возможные перемещения тела без этой связи.
Возможным перемещением
точки называется такое бесконечно малое мысленное перемещение, которое допускается в данный момент.Шарнирная опора. Шарнир допускает поворот вокруг точки закрепления. Различают два вида шарниров.
Подвижный шарнир. Стержень, закрепленный на шарнире, может поворачиваться вокруг шарнира, а точка крепления может перемещаться вдоль направляющей (площадки). Реакция подвижного шарнира направлена перпендикулярно опорной поверхности, так как не допускается только перемещение поперек опорной поверхности.
Неподвижный шарнир. Точка крепления перемещаться не может.
Стержень может свободно поворачиваться вокруг оси шарнира. Реакция такой опоры проходит через ось шарнира, но неизвестна по направлению. Ее изображают в виде двух составляющих: горизонтальной и вертикальной (Rx, Ry).
Защемление, или «заделка». Любые перемещения точки крепления невозможны.
Под действием внешних сил в опоре возникают реактивная сила и реактивный момент
Реактивная сила представляется в виде двух составляющих вдоль осей координат:
R = Rx+ Ry.
3. Определение равнодействующей геометрическим способом
Система сил, линии действия которых пересекаются в одной точке, называется сходящейся.
Необходимо определить равнодействующую системы сходящихся сил (F1; F2; F3;…; Fn), где n – число сил, входящих в систему.
В соответствии со следствиями из аксиом статики, все силы системы можно переместить вдоль линии действия, и все силы окажутся приложенными к одной точке.
Используя свойство векторной суммы сил, можно получить равнодействующую любой сходящейся системы сил, складывая последовательно силы, входящие в систему. Образуется многоугольник сил.
При графическом способе определения равнодействующей векторы сил можно вычерчивать в любом порядке, результат (величина и направление равнодействующей) при этом не изменится.
Вектор равнодействующей направлен навстречу векторам сил-слагаемых. Такой способ получения равнодействующей называется геометрическим.
Многоугольник сил строится в следующем порядке.
1. Вычертить векторы сил заданной системы в некотором масштабе один за другим так, чтобы конец предыдущего вектора совпал с началом последующего.
2. Вектор равнодействующей замыкает полученную ломаную линию; он соединяет начало первого вектора с концом последнего и направлен ему навстречу.
3. При изменении порядка вычерчивания векторов в многоугольнике меняется вид фигуры. На результат порядок вычерчивания не влияет.
Условие равновесия плоской системы сходящихся сил. При равновесии системы сил равнодействующая должна быть равна нулю, следовательно, при геометрическом построении конец последнего вектора должен совпасть с началом первого.
Если плоская система сходящихся сил находится в равновесии, многоугольник сил этой системы должен быть замкнут.
Если в системе три силы, образуется треугольник сил.
Геометрическим способом пользуются, если в системе три силы. При решении задач на равновесие тело считается абсолютно твердым (отвердевшим).
Задачи решаются в следующем порядке.
1. Определить возможное направление реакций связей.
2. Вычертить многоугольник сил системы, начиная с известных сил, в некотором масштабе. (Многоугольник должен быть замкнут, все векторы-слагаемые направлены в одну сторону по обходу контура).
3. Измерить полученные векторы сил и определить их величину, учитывая выбранный масштаб.
4. Для уточнения определить величины векторов (сторон многоугольника) с помощью геометрических зависимостей.
4. Определение равнодействующей аналитическим способом
Проекция сил на ось определяется отрезком оси, отсекаемой перпендикулярами, опущенными на ось из начала и конца вектора.
Величина проекции силы на ось равна произведению модуля силы на косинус угла между вектором силы и положительным направлением сил. Проекция имеет знак: положительный при одинаковом направлении вектора силы и оси и отрицательный при направлении в сторону отрицательной полуоси.
Проекция силы на две взаимно перпендикулярные оси.
Fx= Fcosα > 0
Fy= Fcosβ = Fsinα > 0
Величина равнодействующей равна векторной (геометрической) сумме векторов системы сил. Определим равнодействующую аналитическим способом. Выберем систему координат, определим проекции всех заданных векторов на эти оси. Складываем проекции всех векторов на оси х и у.
FΣx= F1x + F2x + F3x + F4x;
FΣy= F1y + F2y + F3y + F4y.
Модуль (величину) равнодействующей можно определить по известным проекциям:
Направление вектора равнодействующей можно определить по величинам и знакам косинусов углов, образуемых равнодействующими с осями координат:
Плоская система сходящихся сил находится в равновесии, если алгебраическая сумма проекций всех сил системы на любую ось равна нулю.
Система уравнений равновесия плоской системы сходящихся сил:
При решении задач координатные оси выбирают так, чтобы решение было наиболее простым. При этом желательно, чтобы хотя бы одна неизвестная сила совпадала с осью координат.
5. Пара сил. Момент силы
Парой сил называется система двух сил, равных по модулю, параллельных и направленных в разные стороны.
Пара сил вызывает вращение тела, и ее действие на тело оценивается моментом. Силы, входящие в пару, не уравновешиваются, так как они приложены к двум точкам.
Действие этих сил на тело не может быть заменено одной равнодействующей силой.
Момент пары сил численно равен произведению модуля силы на расстояние между линиями действия сил плеча пары.
Момент
Внешние силы — Теория и решение задач
Все внешние силы (нагрузки), действующие на изучаемое тело, следует рассматривать как проявление взаимодействия его с окружающими телами, которое представляется в виде сил или пар сил (моментов).
Все внешние силы (нагрузки) могут рассматриваться как сосредоточенные или распределённые.
В природе сосредоточенных сил не бывает. Все реальные тела практически контактируют через небольшие площадки. Однако принцип Сен-Венана позволяет распределенную нагрузку заменить равнодействующей силой, что упрощает расчёт.
Сосредоточенные нагрузки выражаются в ньютонах [H] и обозначается буквой F.
Распределённые нагрузки обозначаются буквой q и они бывают:
- поверхностными (например, давление ветра, воды на стенку). Размерность [FL-2].
- объёмными. Их размерность [FL-3].
- распределенными по длине (например, силу тяжести стержня, учитывая небольшие размеры его поперечного сечения, рассматривают как распределённую нагрузку по длине). Размерность [FL-1].
Сосредоточенные и распределённые нагрузки могут быть как статическими, так и динамическими.
Статическими называются нагрузки, которые изменяют свою величину или точку приложения с очень небольшой скоростью, так что возникающими при этом ускорениями можно пренебречь.
Динамическими называются нагрузки, изменяющиеся во времени с большой скоростью. Возникшие при этом силы инерции могут многократно превосходить те же нагрузки, приложенные статически.
Законы изменения нагрузок во времени могут иметь весьма сложный характер.
В сопротивлении материалов основным изучаемым элементом конструкции является брус – тело, у которого один из линейных размеров (длина) значительно превышает два других, определяющих поперечное сечение. При работе конструкции ее элементы воспринимают внешние силы и действие их передают друг другу.
Классификация внешних нагрузок
Внешние силы делятся на активные и реактивные (реакции связей). Активные связи принято называть нагрузками.
По способу приложения нагрузки бывают объемные и поверхностные, распределенные и сосредоточенные, по характеру изменения в процессе приложения – статические, динамические и повторно-переменные, по продолжительности действия – постоянные и временные.
Примеры решения задач >
Внутренние силовые факторы >
Активные силы и реакции связей . 46. Силы внешние и внутренние
Введение в динамику механической системы. Механическая система. Классификация сил, действующих на механическую систему силы активные (задаваемые) и реакции связей силы внешние и внутренние. Свойства внутренних сил. Масса системы. Центр масс радиус-вектор и координата центра масс. [c.8]С и с т е м а с идеальными связями. Рассмотрим систему, на которую наложены связи, не изменяющиеся со временем. Разделим все действующие на точки системы внешние и внутренние силы на активные и реакции связей. Тогда уравнение (49) можно представить в виде [c.308]
Внешнюю силу, приложенную к какой-либо точке системы, обозначим а внутреннюю А . Заметим, что внутренние и внешние силы могут включать в себя как активные силы, так и силы реакций связей. [c.281]
Внутренние силы не влияют явно на движение центра масс. Они могут влиять только неявно, через внешние силы. Следовательно, одними внутренними силами, без внешних, нельзя вывести из равновесия или изменить движение центра масс системы. Но внутренними силами для неизолированной механической системы можно создать движение отдельных частей системы и, следовательно, взаимодействие с внешними телами, вызывая этим внешние силы реакций связей или изменяя активные силы. Это может изменить движение центра масс или вывести его из равновесия. [c.292]
В отличие от всех остальных сил, действующих на механическую систему и называемых активными силами, реакции внешних и внутренних связей называются пассивными. Модуль и направление каждой активной силы не зависит от других сил, приложенных к системе (например, силы тяжести и др.), модули же и направления реакций связей зависят от совокупности действующих на систему сил, а также и от движения системы. [c.97]
Теорема живых сил. Прежде чем выводить другие следствия из общего уравнения динамики, удобно установить здесь еще одну о ц ую теорему о движении системы, формулировка которой не зависит от подразделения сил на внешние и внутренние или активные и реакции связей. [c.278]
Как известно из теоретической механики, опорные реакции балок определяют путем составления для всей балки и решения уравнений равновесия статики. Будем помнить, что при определении внутренних сил реакции связей учитываются наравне с активными внешними силами, действующими на балку. [c.252]
Как внешние, так и внутренние силы могут быть в свою очередь или активными, или реакциями связей. Разделение сил на внешние и внутренние является условным и зависит от того, движение какой системы тел мы рассматриваем. Например, если рассматривать [c.331]
Дифференциальные уравнения движения системы. Рассмотрим систему, состоящую из п материальных точек. Выделим какую-нибудь точку системы с массой т — Обозначим равнодействующую всех приложенных к точке внешних сил (и активных и реакций связей) через Р1, а равнодействующую всех внутренних сил — через Р к. Если точка имеет при этом ускорение у, то по основному закону динамики [c.342]
Определение 1. В отличие от сил реакций связей заранее заданные силы к (внутренние или внешние) называют активными силами. [c.115]
Следует отметить, что внутренние силы при действии па систему внешних активных сил или сил реакций внешних связей могут косвенно влиять на изменение количества движения системы Р и момента количества движения К. Не изменяя непосредственно эти величины, внутренние силы могут изменять состояние системы (г, у). Изменение состояния системы приводит, вообще говоря, к изменению результирующей внешних [c.153]
Силы, действующие на тела такой системы, можно подразделить на две категории внешние—силы, приложенные к телам данной системы, но обусловленные наличием других тел, не входящих в эту систему, ц внутренние—силы взаимодействия между телами одной и той же системы. Такое подразделение относится как к активным силам, так и к реакциям связей [c.87]
Установив понятие работы силы на возможном перемещении, можно расширить классификацию связей. Рассматривая силы, приложенные к точкам системы, для каждой точки можно распределить приложенные к ней силы на два класса активные силы н реакции связей. Обозначим равнодействующую всех активных сил (внешних и внутренних), приложенных к точке В/, равнодействующую всех сил реакций связей равнодействующую всех сил Е , т. е. [c.328]
В неизолированных механических системах внутренние силы, вызывая движение отдельных частей системы вследствие взаимодействия о внешними телами или окружающей материальной средой, могут вызвать внешние силы в виде сил реакций связей или изменения активных сил, которые могут изменить количество движения системы. [c.289]
В уравнениях (27) и (29) в число внешних и внутренних сил входят и активные силы и силы реакции связей. Но в случае стационарных связей без трения реакции таких связей не производят работы при любом перемещении системы. Поэтому в этом случае неизвестные реакции связей не входят ни в одно из уравнений (27) и (29). [c.640]
Действительно, если система находится в равновесии, то в равновесии находятся и все тела данной системы. Поэтому мы можем каждое тело освободить от наложенных на него внешних и внутренних связей, заменив их соответствующими реакциями, и рассматривать равновесие каждого тела, используя уже знакомые нам условия равновесия. При этом только надо иметь ввиду, что внутренние силы взаимодействия между телами системы (активные и реакции внутренних связей) по аксиоме о равенстве сил действия и противодействия обязательно равны по модулю и имеют противоположные направления. Так, освобождая тело А (рис. 219) от внутренней связи 17 [c.259]
Реакции представляют собой силы, определяемые связями в данном случае это будут внешние силы, так как они не вызываются действием точек, принадлежащих телу. В связи с этим необходимо различать два рода внешних сил активные, или прямо приложенные силы, которые задают произвольно и заставляют действовать на тело, и силы связи, или реакции, возникающие автоматически как следствия первых. Внутренние силы, действующие между точками системы, представляют собою также силы связи, но они попарно исключаются и не входят в условия равновесия. [c.238]
К общим теоремам предыдущего параграфа мы пришли, отправляясь от разделения сил, действующих на систему, на внешние и внутренние. Здесь мы применим другой критерий классификации (п. 3) и разделим эти силы на активные (или прямо приложенные) и реакции связей. Точнее, обозначим через f,- равнодействующую активных сил, приложенных к любой точке [c.266]
Отметим, что деления системы сил на внутренние и внешние силы и на активные силы и реакции связей не взаимосвязаны. [c.89]
Общие замечания о теоремах и законах динамики. Рассмотрим движение системы материальных точек Pj = 1, 2,. .., N) в некоторой инерциальной системе координат. Пусть — масса точки а — ее радиус-вектор относительно начала координат. Если система несвободна, то ее можно рассматривать как свободную, если помимо активных сил, приложенных к точкам системы, учесть реакции связей. Если затем все силы, приложенные к системе, разбить на внешние и внутренние, то из аксиом Ньютона получим дифференциальные уравнения движения рассматриваемой механической системы в виде [c.156]
Представляется также интересным разделить реакции связей, подобно активным силам, на внутренние и внешние ( 171). Если внутренние связи идеальны, сумма их реакций равна нулю [c.303]
Если ввести понятия реактивных и активных переменных, причем первые характеризуют реакцию материала на внешние термомеханические воздействия, а вторые — внутренние силы, порожденные этими воздействиями, то каждая активная переменная связана с реактивными переменными с помощью определяющего уравнения. При этом также существует и обратная связь, т.е. каждая реактивная переменная зависит от активных переменных. В соответствии с принципом причинности любая реактивная переменная может зависеть от настоящих и прошлых значений активных переменных, но не от их значений в будущем. [c.182]
В теории механизмов, в зависимости от характера решаемых задач, применяют различные классификации сил. Согласно первой классификации действующие на механическую систему силы подразделяют на заданные (активные) и реакции связей. Согласно второй классификации действующие на систему силы делят на внешние и внутренние по отношению к этой системе. Эти две классификации сил известны из курса обнщй механики. Третья классификация является специфичной для теории механизмов. Согласно третьей классификации силы, действующие на механизм и развивающие мощность, подразделяют на силы движущие и силы сопротивления. [c.56]
Принцип Даламбера для системы материальных точек. Рассмотрим систему п материальных точек М, М ,. . ., Л/ , на которую наложены геометрические неосвобождающие связи (н. 1.1. гл. XVII), которые, вообще говоря, не будем предполагать стационарными и идеальными. Массы точек обозначим mi, m2,. .., т . Равнодействующую заданных активных сил (как внешних, так и внутренних), приложенных к v-й точке, обозначим Fv, а равноде11ствующую реакций связей, приложенных к v-й точке, через (v = l, 2,. … .., п) (рис. 20.4). Для каждой из точек системы, на основании второго закона Ньютона, будем иметь [c.363]
Действующие на механическую систему активные силы 1 реакции связей разделя-ют на внешние F% и внутренние Fi (индексы е и i от латинских exterior — внешний и interior — внутренний). Внешними называют силы, действующие на точки системы со стороны точек или тел, не входящих в состав данной системы. Внутренними называют силы, с которыми точки или тела данной системы действуют друг на друга. Это разделение является условным и зависит от того, какая механическая система рассматривается. Например, если рассматривается движение всей Солнечной системы, то сила притяжения Земли к Солнцу будет внутренней если же рассматривается движение системы Земля — Луна, то для этой системы та же сила будет внешней. [c.263]
Рассмотрим теперь механическую систему, состоящую из п материальных точек. Выделим какую-нибудь из точек системы с массой wZfe. Под действием приложенных к ней внешних и внутренних сил и Fi (в которые входят и активные силы, и реакции связей) точка будет двигаться по отношению к инерциальной системе отсчета с некоторым ускорением сг . Введя для этой точки силу инерции —mtflf , получим согласно равенству (85), что [c.345]
Обозначим равнодействующие всех (и внешних, и внутренних) активных сил и реакций связей, действующихjia какую-нибудь точку системы 5ft, соответственно через FI и Тогд , поскольку каждая из точек системы находится в раэновесии, а сле- [c.361]
Силы, действующие в мате- Классификация сил. В динамике, как и в риальной системе, подраз- статике, приступая К решению каждои за-деляют на внутренние и дачи, МЫ должны В первую очередь опре-внешние или на активные и делить материальную точку, или абсолютно реакции связей твердое тело, или материальную систему, [c.255]
Представим равнодействующую силу, приложенную к каждо1[ точке системы, разложенной не на активную силу и реакцию связей, а па внутреннюю и внешнюю силы по отношению ко всей системе [c.344]
На элементы конструкции действуют внешние нагрузки активные и реактивные (реакции связей), — под действием которых возникают внутренние силы силы взашлсдейстЕ ия между частицами твердого тела, препятствующие ею деформации. Как всякую системук сил, внутренние силы, распределенные в сечении нагружен)яого бруса, можно привести центру тяжести сеяния, в результате получим главный вектор R и главный момент М (R) внутренних сил в сечении. Метод сечений позволяет определить внутренние силы, возникающие в поперечных сечениях бруса, через внеииние нагрузки. [c.4]
Обращаем внимание, что, говоря о внутренних силовых факторах, не рекомендуется употреблять глагол действуют, лучше говорить возникают. Выскажем некоторые соображения в защиту этой рекомендации. Известно, что существуют две основные системы построения курса сопротивления материалов. Согласно первой, продольные силы, изгибающие моменты и т. д. рассматриваются как внутренние силовые факторы, согласно второй — как равнодействуюнгие внешних сил, приложенных по одну сторону от проведенного сечения. Здесь, следуя программе для техникумов, методике, принятой ведущими кафедрами вузов, мы трактуем изгибающие моменты и прочие аналогичные величины как внутренние силовые факторы. При этом естественно говорить о их возникновении под действием внешних сил подобно тому, как возникают реакции связей абсолютно жестких тел. При таком подходе нелогично приписывать внутренним силовым факторам какую-либо активную роль, скажем, говорить, что изгибающий момент вызывает изгиб бруса. Такой подход последовательно проведен во всей книге, и мы неоднократно подчеркиваем реактивный характер внутренних силовых факторов. Из сказанного не следует делать вывод о недопустимости иных трактовок, но принятая более логична. [c.56]
Изобразим систему вместе с действуюшими на нее внешними силами активными (Р = mig, Q = mag, G = m.g) и реакциями связей (Ni, Fi, R, Nj, Fj). Внутренние силы не показываем, так как [c.228]
Докажем необходимость и достаточность этого условия равновесия. Пусть система, на которую наложены идеальные голоно.ч-ные стационарные удерживающие связи, состоит из п точек. Обозначил через F/, равнодействующую приложенных к к-й точке активных сил, а через — равнодействующую реакций внешних и внутренних связей, наложенных на ту же точку. При равновесии системы каждая ее точка также находится в равновесии, поэтому для каждой точки можно записать условие равновесия в виде [c.267]
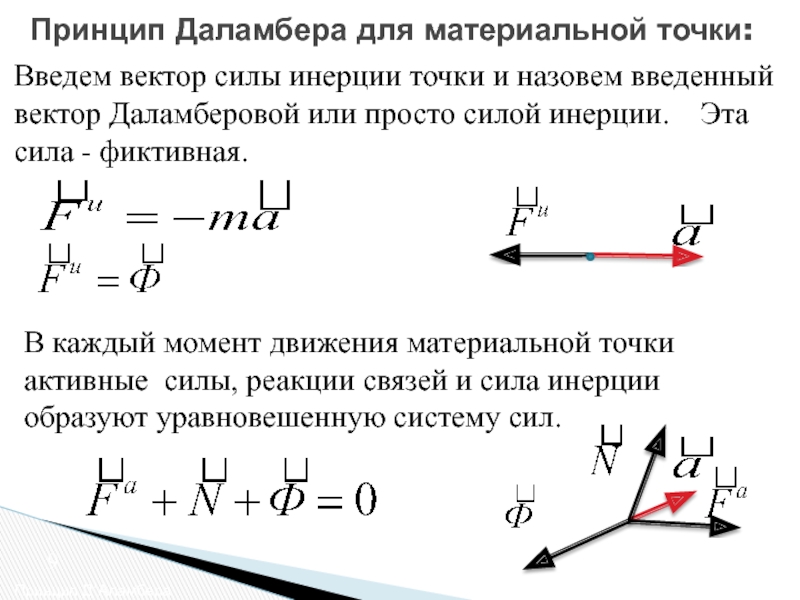
Система уравнений (14.3) выражает принцип Даламбе-ра для системы материальных точек если к каждой точ ке движущейся механической системы условно приложить соответствующую силу инерции, то в любой момент движения действующие на эту точку активные силы [внешние и внутренние), силы реакций связей внешних и внутренних) и сила инерции образуют уравновешен ную систему сил. [c.281]
Оси координат и точки, относительно которых берутся моменты сил, выбираются так, чтобы не подлежащие определению неизвестные силы не входили в уравнения равновесия. Если из составленных уравнений для нерас-члененной системы определить искомые величины hj представляется возможным, то применяют метод расчленения системы на составные части. К каждой части прикладываются активные силы (внешние и внутренние), реакции отброшенных внешних и внутренних связей и силы инерции. Составляются уравнения принципа Да-ламбера для каждой части, и в результате их совместного решения находятся искомые величины. [c.284]
Чтобы избежать опасной путаницы, мы тотчас же условиися, что эта вторая классификация сил не зависит от первой. Для некоторых частных систем, как, например, для свободного твер дого тела, находящегося под действием силы тяжести и поверхностных растягивающих или сжимающих сил, обе классификации приводят к одному и тому же распределению сил в этом случае активные силы (вес и поверхностные силы) являются внешними, а реакции (силы связей твердого тела) — внутренними. Но достаточно подумать о связях, осуществляемых посредством соединенил системы, с внешними по отношению к ней телами (например, подвешенное или опертое твердое тело), а с другой стороны, о силах, происходящих не от связей, но возбуждаемых искусственными приспособлениями или возникающих в естественных физических условиях (например, ньютонианское притяжение между материальными элементами движущейся системы), чтобы видеть, что, вообще говоря, и активные силы, и силы реакции могут быть как внешними >шк и внутренними. [c.255]
Две указанные выше классификации сил, действующих на материальную систему, играют ва>1общих теорем и последующих конкретных приложений. Не будет поэтому лишним вспомнить, что аналогичные обстоятельства имели место в статике, где сначала, разделив силы на внешние и внутренние, мы пришли к основным условиям равновесия (т. I, гл. XII), приложимым в качествь необходимых к всевозможным типам материальных систем (например, к стержневым системам, нитям и т. д., гл. XIV) и, в частности, являющимся достаточными для равновесия твердого тела (гл. Х1П) затем в общей статике (гл. XV), отправляясь от разделения сил на активные силы и реакции и присоединяя ограничительные предпо—ложения о природе связей (отсутствие трения), мы пришли, примени принцип виртуальной работы, к исключению неизвестных реакций н условий равновесия. [c.256]
Мы получили таким образом теорему живых сил в дифференциал ной форме во время движения материальной системы с какими угодно связями и под действием каких угодно сил приращение, которое получает живая сила системы за какой-нибудь элементк времени, равно полной работе, совершаемой за тот же самый элемент времени всеми силами, действующими на систему (внешними и внутренними, активными и реакциями). [c.278]
В результате Л. Б. Левенсон приходит к ряду выводов. Проблема сил инерции существует, ибо ученые до сих пор не пришли к единому мнению об их сущности. Силы могут быть активными и реактивными к последним относятся силы трения, сопротивление среды, силы упругости и силы инерции. Своеобразие сил инерции заключается в следующем 1) по происхождению и действию сила инерции стоит особняком, не являясь ни внешней, ни внутренней (в узком понимании) силой 2) возникающие в одиночку (не парами) силы инерции должны быть уравновешены 3) при отсутствии физической связи, передающей ускорение, сила инерции, хотя и существует как кинематическая реакция материи, но проявить свое действие в ясном виде не может 4) при свободном движении материальной точки из-за полного отсутствия связей действие силы инерции также не может явно проявиться тогда ускоряющая сила действует непосредственно на каждую частицу тела, минуя связи, и сообщает всем частицам равные и параллельные ускорения. [c.49]
Активные и реактивные силы в рычажном механизме захвата при контакте ведомого звена с твёрдым телом Текст научной статьи по специальности «Механика и машиностроение»
Преимущества измерителя массового расхода и плотности, построенного на описанном принципе, следующие: он может работать на потоке среды, осуществляет измерение на всём объёме (интегральным образом), обладает весьма малым гидравлическим сопротивлением.
Как видим, решение рассмотренной задачи представляет не только теоретический интерес, но и может быть использовано при построении измерительного прибора для измерения массового
расхода и плотности жидкости.
СПИСОК ЛИТЕРАТУРЫ
1. Майоров Е. В., Онищук В. А. Об инерционном способе одновременного измерения массового расхода жидкости и её плотности // Прикладная физика. — 2005. — №6. — С. 18.
2. Лойцянский Л. Г. Механика жидкости и газа: учебник для вузов. — 7-е изд., испр. — Москва : Дрофа, 2003.
REFERENCES
1. Mayorov E. V., Onishchuk V. A. Ob inertsionnom sposobe odnovremennogo izmereniya massovogo raskhoda zhidkosti I ee plotnosti [On the inertial method of simultaneous measurement of the mass flow rate of a liquid and its density] // Applied Physics, 2005, №6, P. 18.
2. Loytsyanskiy L. G. Mekhanika zhidkosti I gaza: uchebnik dlya vuzov [Fluid and gas mechanics: a textbook for universities]. 7th ed., Corr. Moscow: Drofa, 2003.
Жиляев Олег Валентинович, аспирант кафедры «Тепловая и топливная энергетика» УлГТУ, заместитель главного конструктора, руководитель Бюро новой продукции отдела главного конструктора Научно-Производственного Общества «Новые Технологии Эксплуатации Скважин», (ООО НПО «НТЭС») г. Бугульма (Республика Татарстан), [email protected].
Поступила 28.01.2019 г.
УДК 531.1; 531.8
В. К. МАНЖОСОВ, А. А. САМСОНОВ
АКТИВНЫЕ И РЕАКТИВНЫЕ СИЛЫ В РЫЧАЖНОМ МЕХАНИЗМЕ ЗАХВАТА ПРИ КОНТАКТЕ ВЕДОМОГО ЗВЕНА С ТВЁРДЫМ ТЕЛОМ
Статья посвящена передаче движения в рычажном механизме захвата. В технологических системах такие механизмы используются для подъёма и перемещения твёрдых цилиндрических тел. Силы трения в зоне контакта ведомого звена с цилиндрической поверхностью исключают возможность разрыва связи твёрдого тела и ведомого звена.
Определено соотношение силы на ведущем звене и возникающей нормальной реакции в зоне контакта ведомого звена с цилиндрической поверхностью. Определено влияние параметров механизма на соотношение этих сил. Определяется зона, в которой отношение сил достигает наименьших значений.
Ключевые слова: рычажный механизм, механизм захвата, передача движения, силы трения, угол передачи движения, условия равновесия.
Захваты рычажного типа составляют распространённую группу устройств, удерживающих объект транспортировки за счёт контактного взаимодействия ведомого звена с объектом [1, 2].
© Манжосов В. К., Самсонов А. А., 2019
В работе [3] рассмотрена схема манипулятора для захвата и перемещения твёрдых цилиндрических тел. Исполнительный механизм (рис. 1), обеспечивающий захват, представляет собой рычажный механизм. Ведущее звено (ползун) исполнительного механизма перемещается поступательно, а ведомое звено (клешня) совершает вращательное движение в плоскости звена АВ = I (рис. 2) и клешни ОБС (обозначим эту плоскость как плоскость х-у).
Рис. 1. Механизм захвата
Рис. 2. Схема механизма в момент захвата
При захвате цилиндрических тел исполнительных механизмов как минимум три. Углы между плоскостями исполнительных механизмов определяются как ф = 2ж / п, где п — число исполнительных механизмов (п > 2).
Схема исполнительного механизма в момент контакта с объектом захвата представлена на рис. 2. При контакте точка С имеет координаты хС и ус = -к. Положение звена ОА в момент контакта определяется углом р . Расстояние от точки С до точек Б и О определяется отрезками БС= 1БС и ОС= 1С .
Положение отрезка ОС относительно вертикали определяется углом рк, положение отрезка БС относительно ОБ= 1Б определяется углом рБ .
При контакте с твёрдым телом в точке контакта (в точке С) повороту звена ОБС противодействует нормальная составляющая реакции — Я и сила трения Е = / ■ Я, где / — коэффициент трения.
Если при перемещении твёрдого тела захват удерживает его за счёт сил трения Е, то величина этих сил должна быть определена из условия надёжности захвата.
Рассекая звено АВ и используя аксиому связей, определим соотношение между движущей силой Р, действующей на ползун, и продольной силой N в поперечном сечении звена АВ. На рис. 3 представлена схема сил, действующих на ползун В и отсечённую часть звена АВ.
N,
Рис. 3. Схема сил, действующих на ползун В и отсечённую часть звена АВ
Рис. 4. Схема сил, действующих на часть звена АВ и ведомое звено (клешню) ОБС
Из условия статического равновесия сил (полагая, что связи звеньев идеальные) следует, что
N cos р-P _ 0, N _ P / cos /3. (1)
На рис. 4 представлена схема сил, действующих на отсечённую часть звена АВ и ведомое звено (клешню) ОБСв момент контакта с твёрдым телом. Из условия статического равновесия сил (полагая, что связи звеньев за исключением в зоне контакта идеальные) следует, что
N cosa-lA — Rh — F ■ xc _ 0, F _ f ■ RN _ R(h + f’ Xc ), (2)
lA cosa
где a — угол давления.
Приравнивая (1) и (2), приходим к равенству
P _ R(h + f ■ xc ) p _ (h + f ■ xc ) cos 3 _ , R ~
cos 3
L cosa
L cos a
В зависимости от угла р и длин звеньев ОА = 1А , АВ = l определяются углы / и рА (рис. 2): 1А /sin/ = l/sinp, sin3 = -ysinp, 3 = arcsin(-ysinp), рА = я-(р + /). В зависимости от lD, хС и h определяются lC , ph, pDC , lDC, pD :
(3)
(4)
lc — ‘sj Xc + h
ph _ arc sin
cos pD _
V lc J
l2 +12 -12 2l l
, Pdc (P + Ph ), lDc _л112c + lD — 2lclD cos Pdc
(pD _ arc cos
Перейдём к относительным величинам: Тогда
l_l / 1а ; xc _ xc/ 1А ; h _ h / 1А ; 1d _ 1D / 1А ;
l2 + i2 — I2
1d^1dc lc
2l l ^1d1dc
l Dc lDc / la ; l c lc / la
■ n sinp .1d1dc
R
cosa
(5)
(6)
(7)
(8)
От угла (рА зависит величина угла передачи движения от звена АВ рычагу ОВ (обозначим его как у) и величина угла давления а = ж /2 — у:
гя-рА, если р<я/2-3; \р +3, если р<я/2-
рА, если р>я/2-3;
у_.
я-(р + 3), если р>я/2-3
(9)
Координата хС точки контакта зависит от поперечных размеров объекта захвата. я /2 .
Так как a _ я / 2 — у, то cos a _ sin у и равенство (8) можно представить в виде
P _ (h + f ■ Xc ) cos 3 R sin у
(10)
На рис. 5 представлены диаграммы, характеризующие изменение углов (рА, у и ß в зависимости от угла ( . Изменение угла ( рассматривается в диапазоне от 1 до 2 радиан при следующих параметрах механизма: l = 5; lD = 1,2; xC = 1; h = 1,2.
В рассматриваемом диапазоне параметров угол ß изменяется в весьма малых пределах от 0,17 до 0,2. В этой связи угол (А = ж — (( + ß) практически линейно зависит от угла ( .
Диаграмма угла передачи движения у имеет чётко выраженный максимум при ( = 1,37. Величина угла у при этом достигает значения у = 1,57 = ж/2 . На рис. 5 затенённая зона показывает область рационального диапазона угла (, при котором целесообразно обеспечивать контакт ведомого звена (клешни) с твёрдым телом. В этом диапазоне угол передачи движения у принимает значения от 1,5 до 1,57.
Обратимся к расчётной зависимости (10), определяющей соотношение движущей силы Р и возникающей в контактной зоне реакции R, значение которой определяет силу трения F = f • R,способной удержать твёрдое тело при захвате и его перемещении.
На рис. 6 представлена диаграмма соотношения сил P/R зависимости от угла (, при котором происходит контакт ведомого звена с твёрдым телом (коэффициент трения f = 0,2). Параметры механизма захвата приняты следующими: l = 5; lD = 1,2; xC = 1; h = 1,2.
25
&
а 2
н
^
а 1,5
К
£ 1
£ 0,5
О
1 = 5; 4 = 1,2;
<Ра = 1′ h =1 7
«X у
ß /
<P, рал
1 1,1 1J2 U 1,4 L5 1,6 1,7 1,8 1,9 2 Рис. 5. Изменение углов (A, у и ß в зависимости от угла (
1.7
1,65
bi
1,Ь
ч Я 1,55
и
и Я К 1.5
а 1,45
о
н
о 1,4
о
и
1,35
1.3
Г =5: lD = хс =1; h = 1. 1 — /
/
/
£>:рад
1 1,1 и 1,3 1,4 1,5 1,6 1,7 1,8 1,9 2 Рис. 6. Диаграмма соотношения сил Р/Лзависимости от угла р при коэффициенте трения / = 0,2
На диаграмме явно можно проследить диапазон минимальных соотношений сил P/R, который вновь попадает в область рациональных значений угла (, когда целесообразно обеспечить контакт ведомого звена (клешни) с твёрдым телом. При принятых параметрах минимальное соотношение сил P/R = 1,37. Это указывает на то, что даже в наиболее благоприятном случае значение движущей силы Р почти на 40 % превышает реакцию R в зоне контакта.
Анализируя зависимость (10), заметим, что для снижения соотношения P/R необходимо увеличивать угол ß и стремиться обеспечить значение угла у близким к ж /2. Целесообразно также стремиться к уменьшению h и xC .
СПИСОК ЛИТЕРАТУРЫ
1. Артоболевский И. И. Механизмы в современной технике. Т. 1. Рычажные механизмы. — Москва : Наука, 1970. — 608 с.
2. Mannaa A. R., Akyurt M., El-Kalay A. K. Six-link Gripperfor Cylindrical Objects // Journal of Islamic Academy of Sciences 3:1, pp. 6- 10, 1990.
3. Самсонов А. А. Манипуляторы для дистанционного перемещения грузов // Сб. материалов 52-й НТК УлГТУ. Ч. 1. — Ульяновск :УлГТУ, 2018. — С. 132 — 135.
REFERENCES
1. Аrtobolevskij I. I. Mekhanizmy v sovremennoj tekhnike. Mechanisms in modern technology. T. 1. Lever mechanisms. Moscow: Science, 1970, 608 p.
2. Mannaa A. R., Akyurt M., El-Kalay A. K. Six-link Gripperfor Cylindrical Objects // Journal of Islamic Academy of Sciences 3:1, pp. 6-10, 1990.
3. Samsonov А. А. Manipulyatory dlya distantsionnogo peremeshheniya gruzov [Manipulators for remote movement of goods] // Sb. materialov 52-j NTK UlGTU. [Materials of the 52nd NTK UlSTU]. CH. Part 1. Ulyanovsk: UlSTU, 2018, pр. 132-135.
Манжосов Владимир Кузьмич, доктор технических наук, профессор, профессор кафедры «Промышленное и гражданское строительство» Ульяновского государственного технического университета. Имеет статьи, монографии, изобретения в области динамики машин, моделирования процессов удара [e-mail: [email protected] ].
Самсонов Александр Анатольевич, аспирант кафедры «Промышленное и гражданское строительство» Ульяновского государственного технического университета. Имеет статьи и патенты в области создания механизмов различного технологического назначения [e-mail: [email protected]].
Поступила 11.02.2019 г.
Определение реакций связей в плоской системе сходящихся сил на основе преобразований с равнодействующей и уравновешивающей силами Текст научной статьи по специальности «Математика»
УДК 378
Чибакова Екатерина Анатольевна Студентка 1 курса Нижегородского государственного архитектурно-строительного университета DOI: 10.24411/2520-6990-2020-11462
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ В ПЛОСКОЙ СИСТЕМЕ СХОДЯЩИХСЯ СИЛ НА
ОСНОВЕ ПРЕОБРАЗОВАНИЙ С РАВНОДЕЙСТВУЮЩЕЙ И УРАВНОВЕШИВАЮЩЕЙ
СИЛАМИ
Chibakova Ekaterina Anatolyevna
1st year Student of Nizhny Novgorod State University of Architecture and Civil Engineering
DETERMINATION OF BOND REACTIONS IN A FLAT SYSTEM OF CONVERGING FORCES BASED ON TRANSFORMATIONS WITH RESULTANT AND BALANCING FORCES
Аннотация
В статье рассматривается способ решения учебных задач статики по определению реакций связей в плоской системе сходящихся сил. Он основан на совокупности преобразований, составляющих три последовательных этапа. На первом этапе находится равнодействующая активных сил. Во время второго этапа определяется уравновешивающая сила для установленной равнодействующей силы. Третий этап связан с разложением уравновешивающей силы на составляющие по направлениям линий действия реакций. Предлагаемый метод решения анализируемого типа задач является графоаналитическим. В сравнении с классическим методом его отличает возможность выполнения геометрических построений без результатов аналитических расчетов.
Abstract
The article considers a method for solving training problems of statics to determine the reactions of bonds in a flat system of converging forces. It is based on a set of transformations that make up three consecutive stages. The first stage is to find the resultant active forces. During the second stage, the balancing force for the set resultant force is determined. The third stage is associated with the decomposition of the balancing force into components along the lines of action of the reactions. The proposed method for solving the analyzed type ofproblems is graphoanalytic. In comparison with the classical method, it is distinguished by the ability to perform geometric constructions without the results of analytical calculations.
Ключевые слова: методика обучения теоретической механике, основы статики, сила, плоская система сходящихся сил, активные и реактивные силы, условия равновесия, равнодействующая сила, уравновешивающая сила, разложение силы на составляющие.
Key words: methods of teaching theoretical mechanics, basics of statics, force, flat system of converging forces, active and reactive forces, equilibrium conditions, resultant force, balancing force, decomposition of force into components.
Применение условий равновесия к плоским системам сходящихся сил (далее ПССС) представляет реализацию графоаналитического метода решения автономного класса учебных задач с практической направленностью. В теоретической механике, как общепрофессиональной дисциплине специальностей технического профиля в учреждениях профессионального образования, равновесие ПССС изучается в начале раздела «Статика». На теоретических и практических занятиях анализируются векторы активных и реактивных сходящихся сил, рассматриваются способы эквивалентных преобразований и общий алгоритм установления зависимостей между внешними и внутренними факторами, выполнения расчетов и геометрических построений.
Анализ научно-методических и периодических изданий за последнее время позволяет выделить актуальные вопросы теории и практики, связанные с решением задач статики в ПССС и методикой обучения способам решения таких задач. К ним относятся: разработка дидактических средств, в том числе электронных ресурсов и приложений,
методических материалов, современных педагогических технологий [1-7 и др.]; создание фондов учебных и олимпиадных задач и заданий [8-14 и др.]; раскрытие принципов и способов решения задач статики [15-19 и др.]; стимулирование познавательной и самостоятельной деятельности студентов [20-23 и др.] и т.д.
В целом, следует констатировать, что в техническом знании сформировался общий подход, который описан в учебной литературе и может считаться классическим применительно к анализируемым задачам [24; 25 и др.]. Вместе с тем, существуют оригинальные и альтернативные способы решения задач статики, отличающиеся от общей схемы рассуждений и последовательности осуществляемых операций [26-33 и др.]. Изучение их способствует более глубокому осмыслению причинно-следственных связей и закономерностей в статических системах, а также стимулирует процесс творческого поиска.
В ходе нашей самостоятельной познавательной деятельности удалось обратить внимание на возможность определения реакций в идеальных
связях по параметрам приложенных сил в ПССС на основе уравновешивания результирующей нагрузки с последующим разложением уравновешивающей силы по линиям действия реакций. Как и в случае применения классического способа, предлагаемый метод позволяет аналитически и графически находить реактивные силы, то есть произ-
водить независимую проверку. В этой связи обоснование нашего подхода к решению задач статики в ПССС и сравнение его с классическим методом представляет цель публикуемой работы.
Рассмотрим конкретный пример и решим задачу в общем виде разными способами.
Рис. 1. Исходные условия задачи.
Пусть через блок, закрепленный на стержнях с шарнирными связями, проходит трос, нагруженный силой тяжести груза (см. рис. 1). Угол между стержнями составляет а, а угол между ветвями троса — р. Требуется определить реакции в стержнях, пренебрегая массой конструкции, за исключением груза, трением и размерами блока.
Допущение пренебрежения диаметром шкива позволяет считать, что векторы активных и реактивных сил будет сходиться в точке А, совпадающей с проекцией оси блока на плоскость системы. Введем прямоугольную систему координат хоу, совместив начало отсчета с точкой А и направив оси по горизонтали и вертикали. Реализуем принцип освобождаемости (см. рис. 2).
Рис. 2. Преобразование данных: введение системы координат, реализация принципа освобождаемости, получение ПССС.
Классическое решение предусматривает применение условий равновесия: (ЕХ = 0
W = 0 ‘
которые в нашем случае представляют систему уравнений:
sin Р sin а
R2 =
( ZX = R2 • sina + Т • sinр = 0 {ZY = R±+cosa-G — Т • cosfi = 0 ‘ Поскольку трение в блоке не учитываем, то G = Т. Поэтому
R±= G + G^cosp + G
cos а = G • (1 + cos p + sin p • ctg a),
sin P sin a
(1)
G
(2)
Отрицательный знак реакции R2 указывает на то, что в действительности она имеет противоположное выбранной стороне направление.
В некоторых источниках для выполнения проверки предлагается произвести поворот системы
координат до совмещения оси абсцисс или ординат с другой линией действия какой-либо из сил и вновь применить условия равновесия. Равенство ответов будет аналитическим подтверждением правильности решения задачи.
Геометрическая проверка заключается в построении силового многоугольника с соблюдением линейных размеров в масштабе, отложением заданных углов и сохранением направлений векторов. Замкнутость многоугольника (совпадение конца последнего вектора с началом первого) является признаком верного определения реакций.
Предлагаемый нами способ на первом этапе решения задачи предусматривает нахождение равнодействующей Рг активных сил С и Т, которая будет диагональю параллелограмма, построенного на данных векторах, как сторонах (см. и уравновешивающей Р сил, реакций и Й2; б) построение силового треугольника на векторах Р, Й-1 и Й2.
Дополнительные построения позволяют выделить треугольник, образованный векторами Р, Й1 и Й2 (см. рис. 3б), с углами:
R1R2= a; G1F = G Fs = G R2 = n
а—
2
Применим теорему синусов и получим двойное равенство:
sm(n-a-j) sin(£)
Откуда, для первой реакции, учитывая формулу приведения,
F
R
R
1
2
ып и
sin(n — a — ?) = sin (a + ?), приходим к промежуточному результату:
R = F—(—— .(D
к2)
сtg a] =.
= G-[2-cos*(§ + 2-cos(§-sin(§-с tg a ] .
В соответствии с формулой понижения степени половинного угла (аргумента):
2 • cos2 (?) = 1 + cos ß,
а по формуле двойного угла (аргумента):
2 • с os (?) • s in (?) = s in ß .
Тогда уравнение для R1 запишется иначе:
R1 = G • (1 + cos ß + sin ß • ctg a) . (6) Аналогичные преобразования произведем с формулой (5):
R2 = 2 • G • cos (?)
(Ё\
sjn(äl-G.sJnl (7)
s in а
K2J s ina
Таким образом, решение задачи разными способами — классическим методом, общеизвестным по учебно-методической и справочной литературе, и предлагаемым нами методом — приводит к одним и тем же результатам. Полученные выражения (1) и (7), (2) и (8) для определения реакций Rt и R2 на основе исходных данных — силы тяжести G и углов а и р — попарно одинаковы. Поскольку рассуждения производились в самом общем виде, то можно сделать заключение о достоверности и альтернативности данных подходов при определении реакций в ПССС. Следовательно, по отношению друг к другу данные методы могут применяться для выполнения проверочных расчетов или геометрических построений.
Ради объективности признаем, что аналитически предлагаемый способ сложнее обычного классического способа из-за большего числа преобразований с тригонометрическими формулами. Но геометрически он более очевиден, позволяет на основе умозаключений утверждать об истинном направлении реактивных сил и находить необходимые значения реакций путем только построений в те же самые три этапа — 1) определение равнодействующей активных сил, 2) уравновешивание равнодействующей и 3) разложение уравновешивающей на составляющие по линиям действия реакций. При этом не требуются предварительные или промежуточные
вычисления. Кроме того, следует отметить и то обстоятельство, что аналитическая сложность в значительной степени зависит от условий учебной задачи.
Литература
1. Лежнёв С.Д., Чуба А.Ю. Демонстрационная установка «Реакции связей плоской сходящейся системы сил» // Сборник материалов L Меж-дунар. студенч. науч.-практ. конф. «Актуальные вопросы науки и хозяйства: новые вызовы и решения». Тюмень, 17 марта 2016 г. — Тюмень: Изд-во Государственного аграрного ун-та Северного Зауралья. 2016. С. 71-73.
2. Митюшов Е.А., Мисюра Н.Е., Берестова С.А. Инновационные технологии массового обучения на примере онлайн курса «Инженерная механик» // Инженерное образование. 2017. № 21. С. 8389.
3. Носков М.В., Носкова О.Е. Методика применения прикладных программ при изучении дисциплины «Теоретическая механика» // Сборник мат-лов Междунар. науч.-практ. конф. «Информатизация образования: теория и практика», 20-21 ноября 2015 г. — Омск: Изд-во ООО «Полиграфический центр КАН». 2015. С. 112-117.
4. Носкова О.Е. Использование прикладных онлайн-программ при изучении теоретической механики // Современные проблемы науки и образования. 2015. № 5. С. 476.
5. Обносов К.Б., Бондаренко Н.И., Паншина
A.В. О методике компьютерного тестирования студентов по разделу «Статика» // Автомобиль. Дорога. Инфраструктура. 2018. № 2 (16). С. 17.
6. Свидетельство о государственной регистрации программы для ЭВМ RU 2017611363. «Программа для электронного ресурса «Основы статики» / А.С. Чибаков, Д.А. Крылов, Н.В. Кузьмин; заявитель и правообладатель Федеральное государственное бюджетное образовательное учреждение высшего образования «Марийский государственный университет» (RU). — № 2016660641; завял. 11.10.2016; опубл. 02.02.2017 — 1 с.
7. ЭВМ в курсе теоретической механики. Применение вычислительной техники в учебном процессе. Учеб. пособ. для студентов вузов, обучающихся по машиностроит. специальностям /
B.Д. Бертяев [и др.]. Федер. агентство по образованию РФ, Тул. гос. ун-т, Тул. ин-т экономики и информатики. 2005. 234 с.
8. Гаврилов А.А., Морозов Н.А. Принципы формирования условий задач по разделу «Статика» на примере плоской системы сил // Мат-лы Все-росс. науч.-метод. конф. «Университетский комплекс как региональный центр образования, науки и культуры». — Оренбург: Изд-во Оренбургского гос. ун-та. 2016. С. 45-49.
9. Дубинин В.В. и др. Сборник олимпиадных задач по теоретической механике. Учеб. пособ. / Г.М. Тушева, Н.Л. Нарская, Г.И. Дубровина, Ю.С. Саратов. Под ред. В.В. Дубинина. — М.: Изд-во Московского гос. технического ун-та им. Н.Э. Баумана. 2006. — 56 с.
2
ä in а
10. Ким Л.И. и др. Сборник задач повышенной сложности по теоретической механике (статика) / Л.И. Ким, В.Б. Зиновьев, А.М. Попов. — Новосибирск: Изд-во Сибирского гос. ун-та путей сообщения. 2010. — 40 с.
11. Попов В.И. и др. Сборник олимпиадных задач по теоретической механике. Часть 1. Статика. Учебное пособие. Изд. второе, перераб. и доп. /
B.И. Попов, В.А. Тышкевич, М.П. Петров, А.И. Попов. — Тамбов: Изд-во Тамбовского гос. технического ун-та. 2002. — 80 с.
12. Сборник коротких задач по теоретической механике: учебное пособие / под ред. О.Э. Кепе. — 6-е изд., стер. — Санкт-Петербург: Лань, 2019. — 368 с.
13. Мещерский И.В. Задачи по теоретической механике: Учебное пособие. — 52-е изд., стер. / Под ред. В.А. Пальмова, Д.Р. Меркина. — СПб.: Издательство «Лань», 2019. — 448 с.
14. Кирсанов М.Н. Решебник. Теоретическая механика / М.Н. Кирсанов; под ред. А.И. Кириллова. — 2-е изд., испр. — М.: Физматлит, 2008. — 384 с.
15. Королев Ю.В. Теоретическая механика. Учимся решать задачи. Учеб. пособ. для самостоятельной работы в 2-х частях. Часть 1. Статика. — Иркутск: Изд-во Иркутского национального исследовательского технического ун-та. 2015. 108 с.
16. Крутова И.А., Исмухамбетова А.С. Методы решения основных задач теоретической механики. Учеб. -метод. пособ. — Астрахань: Изд-во ИД «Астраханский университет». 2015. 147 с.
17. Максимова О.Г. и др. Основы теоретической механики в примерах и задачах. Учеб. пособ. / О.Г. Максимова, А.В. Максимов, Я.А. Соловьева. -Вологда: Изд-во Вологодского гос. ун-та. 2014. 95 с.
18. Попов А.М. и др. Задания по теоретической механике (статика). Методич. указ. / А.М. Попов, В.Б. Зиновьев, Л.А. Спиридонова, Г.П. Куроч-кин. — Новосибирск: Изд-во Сибирского гос. ун-та путей сообщения. 2018. — 83 с.
19. Статика. Примеры решения задач по теоретической механике для самостоятельной работы студентов: учебно-методическое пособие / Сост. Н.В. Кузнецова, В.Е. Головко, Ю.Н. Лазарев,
C.Г. Петров, М.В. Саблина; ГОУВПО СПбТГУРП. СПб., 2009 27 с.
20. Чибаков А.С. О проблематизации в профессиональном обучении квалифицированных рабочих, служащих и специалистов как факторе формирования опыта аргументированного принятия решений // Интернет-журнал «Мир науки» 2016, Том 4, номер 4 http://mir-nauki.com/PDF/44PDMN416.pdf (доступ свободный).
21. Шляхова А.Г., Хатыпов А.И., Шляхов А.Т. Теоретическая механика. Методические указания по организации самостоятельной и выполнению расчетно-графической работ по дисциплинам: «Теоретическая механика». — Альметьевск: Изд-во Альметьевского гос. нефтяного ин-та. 2013. 85 с.
22. Хохлова О.А., Хохлов А.В., Пономарева Е.В. Применение комплекса электронных проблемно ориентированных обучающих систем по
теоретической механике // Вестник Астраханского государственного технического университета. 2017. № 1 (63). С. 69-76.
23. Самсонов Г.П., Клоков А.С., Сорокин А.Н. Практика применения базы знаний Wolframalpha во внеаудиторной самостоятельной работе обучающихся при изучении раздела «Статика» курса теоретической механики // Электронный научно-методический журнал Омского ГАУ. 2017. № 1 (8). С. 43.
24. Кокушкин В.В. и др. Пространственная статика. Учебное пособие / В.В. Кокушкин, С.Н. Саяпин, П.М. Шкапов. — М.: Изд-во Московского гос. технического ун-та им. Н.Э. Баумана. 2015. — 48 с.
25. Теоретическая механика: теория, задания и примеры решения задач. Издание второе исправленное и дополненное. Учебное пособие для техн. вузов/ Ермаков Б.Е., Асриянц А.А., Борисевич В.Б., Кольцов В.И.; Под ред. Б.Е. Ермакова. М.: 2007 -344 с.
26. Девин В.В., Ткачук В.С. Векторная форма решения задач пространственной статики в системе Mathcad // Актуальные научные исследования в современном мире. 2018. № 10-1 (42). С. 60-70.
27. Назарова О.Н., Зимина Н.Г., Шишкарев В.В. Обоснование графического решения некоторых задач механики // Colloquium-journal. 2019. № 12-3 (36). С. 57-60.
28. Скрыльников Н.Е. Применение математических методов для исследования равновесия тел на примере задач из теоретической механики // Сборник науч. статей Междунар. науч. -практ. конф. «Математика и ее приложения в современной науке и практике». Отв. ред. Е.А. Бойцова. Курск, 15-17 апреля 2015 г. — Курск: Изд-во ЗАО «Университетская книга». 2015. С. 150-156.
29. Чибаков А.С. Геометрические этюды в решении учебных задач по определению реакций идеальных связей в статике // Школа будущего. 2016. № 6. С. 122-127.
30. Чибаков А.С. Метод координат в решении учебных задач статики по определению реакций идеальных связей // Школа будущего. 2016. № 5. С. 134-140.
31. Чибаков А.С. Определение реакций идеальных связей в плоской системе сходящихся сил на основе свойств геометрических фигур // Глобальный научный потенциал. 2016. № 10 (67). С. 2833.
32. Чибаков А.С. Совершенствование методики обучения решению задач статики в курсе технической механики в организации среднего профессионального образования // Современные наукоемкие технологии. 2017. № 12. С. 107-112.
33. Ягафарова Х.Н., Ямалтдинов А.И. Применение математических методов при формировании общеинженерных компетенций у студентов технических вузов // Электронный научный журнал Нефтегазовое дело. 2015. № 2. С. 477-490.
2. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ
13
2.1. Свободное и несвободное тело. Активные и реактивные силы
Тело называется свободным, если под действием приложенных к нему сил может перемещаться в любом направлении (рис. 2.1, а).
Тело, свобода перемещения которого ограничена другими телами, называется несвободным (рис. 2.1, б).
Тела, ограничивающие свободу перемещения данного тела, называются его связями.
При действии данного тела на связь с ее стороны возникает противодействие. Сила, с которой связь действует на данное тело, называется реакцией связи (R).
Таким образом, все силы, действующие на данное тело, можно подразделить на активные и реактивные силы.
Активными называются известные по модулю и направлению силы, с которыми на данное тело действуют другие тела, не являющиеся его связями.
Реактивные силы – это реакции связей данного тела. Реакции связей возникают только в том случае, когда тело под действием активных сил давит на связи. При этом направление реакции связи противоположно направлению, по которому связь препятствует перемещению данного тела, и зависит от типа связи.
При решении задач статики часто используется принцип освобождаемости тел от связей. Согласно этому принципу несвободное тело (рис. 2.1, б) можно рассматривать как свободное, если связи заменить их реакциями (рис. 2.1, в).
2.2. Основные типы связей
1.Абсолютно гладкая плоскость (или поверхность), где силы трения пренебрежимо малы. Реакция R гладкой плоскости (или поверхности) направлена по нормали к поверхности (рис. 2.2, а – 2.2, в).
2.Ребро. Реакция ребра R направлена по нормали к поверхности тела, опирающегося на это ребро (рис. 2.2, г).
3.Гибкая связь (трос, канат, нить). Реакция нити Т на данное тело направлена вдоль нити (рис. 2.2, д). Гибкая связь может испытывать только растяжение. При этом растягивающее усилие (натяжение) нити неизменно на всех ее участках и равно реакциям нити на соединяемые ей тела. При растяжении реакции направлены от тел, соединяемых нитью (рис. 2.2, е). Если пренебречь силами трения, то натяжение нити на всех ее участках равно величине подвешенного к ней груза (Т = Р).
4.Тонкий невесомый (незагруженный) стержень с шарнирами по концам.
Шарнир – это устройство, допускающее поворот одного тела относительно другого. Реакция тонкого стержня N на данное тело направлена по прямой, соединяющей шарнирные концы стержня (рис. 2.3, а). В зависимости от направления сил, действующих со стороны шарниров, прямой невесомый
14
стержень АВ может испытывать растяжение или сжатие (рис. 2.3, б). Усилие стержня изображается его реакциями на шарниры: при растяжении – стрелками от шарниров, а при сжатии – стрелками к шарнирам.
5. Шарнирно-подвижная опора (рис. 2.4, а). Эта связь допускает поворот данного тела вокруг оси опорного шарнира и поступательное (линейное) перемещение тела параллельно опорной плоскости. Реакция связи R проходит через центр шарнира перпендикулярно опорной плоскости. Конструкция шарнира представляет собой подшипник (цилиндрический шарнир), наружная обойма которого крепится к опоре, а внутренний валик – к данному телу. Шарнирно-подвижная опора эквивалентна одной связи 4-го типа (рис. 2.4, б).
6. Шарнирно-неподвижная опора (рис. 2.4, в). Эта связь допускает только поворот данного тела вокруг оси опорного шарнира, препятствуя любому поступательному движению тела. Реакция связи R проходит через центр шарнира, но линия действия реакции может быть какой угодно в зависимости от сил, действующих на данное тело. Таким образом, определению подлежат как модуль R, так и угол α, определяющий направление реакции. Очень часто вместо R и α определяют составляющие Х и У реакции по взаимно перпендикулярным осям х и у, после чего, используя в условиях плоской задачи зависимости (1.1) и (1.2), определяют модуль и направление реакции
R = X + У = Хi + Уj
где Х, У – проекция R на оси х, у.
R = \/ Х2 + У2 , tg α = У / Х → α
Шарнирно-неподвижная опора эквивалентна двум связям 4-го типа (рис. 2.4, г).
7.Жестко защемляющая опора (заделка). Эта связь (рис. 2.4, д)
препятствует любому поступательному и вращательному движению данного
тела. Составляющими реакции заделки А являются горизонтальная Ха, вертикальная Уа составляющие и опорный момент Ма. Заделка эквивалентна трем связям 4-го типа, оси которых не должны пересекаться в данной точке
(рис. 2.4, е).
8.Шаровой шарнир (рис. 2.4, ж). Эта связь представляет собой шар, который может вращаться внутри сферической полости. Линия действия реакции R проходит как угодно в пространстве через центр шара. Модуль и направление реакции R можно определить через ее составляющие Х, У и Z по зависимостям (1.2) и (1.3).
Связи, реакции связей и принцип освобождаемости в статике.
Теоретическая механика
Принцип освобождаемости.
Связи и реакции связей
Как уже упоминалось в предыдущих статьях, статика изучает условия, при которых тела и материальные точки находятся в состоянии равновесия. Казалось бы, благодаря аксиомам статики, описывающим основные свойства силового взаимодействия между телами, решение задач равновесия тел не должно представлять трудностей — неизвестные силы можно найти, зная, что они должны уравновешиваться известными силами, отсюда и ключ к решению.
Тем не менее, основная сложность при расчетах заключается в том, что силы — векторные величины, и для решения задач необходимо знать не только их скалярные размерности (модули), но и направление в пространстве, а также точки приложения. В результате получается, что каждая неизвестная сила содержит три вопроса: куда она направлена, где приложена, и какова ее величина?
Исключить некоторые неизвестные составляющие сил помогает анализ связей между телами. Как мы уже знаем, все тела и материальные точки подразделяются на свободные и связанные (несвободные). В статике чаще всего приходится решать задачи, в которых рассматривается условие равновесия связанных тел, т. е. имеющих некоторые (или полные) ограничения на перемещение в пространстве относительно других тел.
Эти ограничения называются связями.
Примерами связей, ограничивающих перемещение тела, может послужить поверхность или какая-либо опора, на которой лежит тело, жесткая заделка части тела в массив, исключающая любое его перемещение, а также гибкие и шарнирные связи, частично ограничивающие возможность тела перемещаться в пространстве.
Анализ таких связей позволяет понять, какие силовые факторы возникают в них при противодействии перемещению связанного тела. Эти силовые факторы называют силами реакции или реакциями связей (обычно их называют просто реакциями).
Силы, которыми тело воздействует (давит) на связи называют силами давления.
Следует отметить, что силы реакций и давлений приложены к различным телам, поэтому не представляют собой систему сил.
Силы, действующие на любое тело можно разделить на активные и реактивные.
Активные силы стремятся перемещать тело, к которому они приложены, в пространстве, а реактивные силы — препятствуют этому перемещению. Силы реакции связей относятся к реактивным силам.
Принципиальное отличие активных сил от реактивных заключается в том, что величина реактивных сил зависит от величины активных сил, но не наоборот. Активные силы часто называют нагрузками.
При решении большинства задач статики несвободное тело условно изображают как свободное с помощью так называемого принципа освобождаемости, который формулируется следующим образом: всякое несвободное (связанное) тело можно рассматривать как свободное, если отбросить связи и заменить их реакциями.
***
Типичные связи тел и их реакции
Рассмотрим наиболее часто встречающиеся связи, а также возникающие в них реакции при приложении нагрузок.
Идеально гладкая плоскость
Реакция идеально гладкой плоскости направлена перпендикулярно опорной плоскости в сторону тела, так как такая связь не дает телу перемещаться лишь в одном направлении — в сторону опорной плоскости, т. е. перпендикулярно ей (см. рисунок 1,а).
Если же тело находится на наклонной плоскости, то силу его тяжести G можно разложить на две составляющие, из которых одна будет направлена параллельно плоскости (Xa), другая — перпендикулярно ей (Ya). При этом первая сила будет стремиться передвигать тело по плоскости в сторону уклона, а вторая — прижимать его к плоскости (см. рисунок 1,б).
Реакция наклонной плоскости будет равна по модулю составляющей, перпендикулярной плоскости и направлена в сторону, противоположную этой составляющей, уравновешивая ее. Если тело касается плоскости одной точкой (например, шар или угол), то реакция будет приложена к этой точке тела.
В других случаях, когда тело касается плоскости некоторой поверхностью, имеет место взаимодействие посредством нагрузки, распределенной по этой поверхности (распределенной нагрузки).
Идеально гладкая поверхность
Идеально гладкая поверхность (отличается от плоскости криволинейностью) реагирует перпендикулярно касательной плоскости, т. е. по нормали к опорной поверхности в сторону тела, так как нормаль — единственное направление перемещения тела, которое не допускает данная связь (см. рисунок 1,в).
Закрепленная точка или ребро угла
В случае, если перемещение тела ограничивается закрепленной точкой или ребром угла, реакция связи направлена по нормали к поверхности идеально гладкого тела в сторону тела, так как нормаль к поверхности тела — единственное направление, движение в котором ограничено этим видом связи (см. рисунок 1,г).
Гибкая связь
Реакция гибкой связи (гибкая нить) не дает телу удаляться от точки подвеса и поэтому направлена вдоль связи от тела к точке подвеса, т. е. известны точка приложения реакции гибкой связи и ее направление. На рисунке 2 изображена гибкая связь, служащая связующим звеном между двумя стержнями и телом.
В конструкциях широкое распространение имеют связи, которые называются шарнирами. Шарнир представляет собой подвижное соединение двух тел (деталей), допускающее только вращение вокруг общей точки (шаровой шарнир) или вокруг общей оси (цилиндрический шарнир). Рассмотрим, какие реакции возникают при связывании тела с помощью шарниров.
Идеально гладкий цилиндрический шарнир
При связывании тела цилиндрическим шарниром возможно его перемещение вдоль оси шарнира и вращение относительно этой оси.
Реакция цилиндрического шарнира расположена в плоскости, перпендикулярной его оси и пересекает эту ось. Направление вектора реакции шарнира на этой плоскости зависит от направления вектора нагрузки.
Примером цилиндрического шарнира может послужить обыкновенный подшипник качения.
Идеально гладкий шаровой шарнир
В этом случае заранее известно лишь то, что реакция проходит через центр шарнира, так как тело, связанное шаровым шарниром, может поворачиваться в любом направлении относительно оси шарнира, но не может совершать никаких линейных перемещений в пространстве, т. е. удаляться от центра шарнира или приближаться к нему.
Идеально гладкий подпятник
Подпятник можно рассматривать, как сочетание цилиндрического шарнира и опорной плоскости, поэтому реакция подпятника считается состоящей из двух составляющих: Xa и Ya. При этом одна из реакций будет направлена вдоль нормали к опоре в сторону тела (как у опорной плоскости), другая — перпендикулярно оси подпятника (как у цилиндрического шарнира).
Полная реакция подпятника будет равна векторной сумме этих составляющих: Ra = Xa +Ya.
Стержень, закрепленный шарнирно
Стержень, закрепленный двумя концами в идеально гладких шарнирах и нагруженный концами (рис. 2), реагирует только по линии, соединяющей оси шарниров, т. е. вдоль своей оси (согласно III аксиоме статики). При этом реакция стержня может быть направлена и к центру шарнира (точке крепления), и от него (в зависимости от направления нагрузки), поскольку этот вид связи удерживает тело на фиксированном расстоянии, не позволяя ему удаляться или приближаться. Этим стержень принципиально отличается от гибкой связи, у которой реакция всегда направлена от точки крепления в сторону связи (гибкая связь удерживает тело только от удаления, не запрещая ему приближаться к точке крепления).
Жесткая заделка
Этот вид связи полностью лишает тело возможности перемещаться в любом направлении и вращаться относительно какой-либо оси или точки.
При жесткой заделке тела (рис. 3) в опоре возникает не только реактивная сила RA, но и реактивный момент МA.
Жесткая заделка является «темной лошадкой» при вычислениях, поскольку изначально ни направление реакций, ни их величина неизвестны, особенно если нагрузка представлена системой сил. Тем не менее, используя разложение активных сил на составляющие, последовательно можно определить и реактивную силу RA, и реактивный момент MA, действующие в жесткой заделке.
В случае, если тело связано не только жесткой заделкой, но и другим видом связи, задача становится нерешимой обычными методами статики, поскольку неизвестных реакций больше, чем возможное количество уравнений равновесия.
Пример решения задачи по определению реакций жесткой заделки приведен на этой странице.
***
Понятие бруса и балки в технической механике
В статике нередко приходится решать задачи на условие равновесия элементов конструкций, называемых брусьями.
Брусом принято считать твердое тело, у которого длина значительное больше поперечных размеров. Осью бруса считается геометрическое место (множество) центров тяжести всех поперечных сечений этого бруса.
Брус с прямолинейной осью, положенный на опоры и изгибаемый приложенными к нему нагрузками, называют балкой.
***
Распределенные нагрузки
Главная страница
Дистанционное образование
Специальности
Учебные дисциплины
Олимпиады и тесты
Механика
ньютонов — Реактивная сила на двух объектах с центральными силами
У меня есть путаница с реактивными силами в том, как они действуют, и я надеюсь подчеркнуть свое замешательство с некоторыми (очень) плохо нарисованными мной графикой.
Насколько я понимаю (вероятно, неверно), реактивная сила Третьего закона Ньютона — это вектор силы, равный по величине и противоположный по направлению приложенной силы. В случае объекта, совершающего круговое движение, ось ощущает внешнюю силу от вращающегося тела.Если я стреляю из пистолета, сила выстрела отталкивает меня (отсюда и удар ногой). У пушек есть колеса не зря. Насколько я понимаю, это показано на изображении, которое я вырезал, но это изображение человека, бьющего кого-то в лицо, и соответствующие силы в результате: Я не совсем уверен, совпадает ли $ F_ {face} $ с нормальной силой, но силы должны быть сбалансированы, так как после контакта кулак перестает двигаться и испытывает шок (точно так же, как удар по черепу может сломать тебе руку). Нормальная сила, или просто $ F_ {face} $ — это сила реакции от лица к лицу в результате самого удара.По крайней мере, так я считаю.
Это понимание реактивных сил причиняет мне боль сейчас, когда я рассматриваю следующий сценарий: два объекта чувствуют центральные силы в результате друг друга (пусть центральной силой будет гравитация).
На втором плохом рисунке у меня есть и $ A $, и $ B $, оказывающие друг на друга силу. $ A $ чувствует силу $ F_ {ab} $ (сила на $ A $ в результате $ B $), в то время как $ B $ ощущает $ F_ {ba} $ (сила на $ B $ в результате $ A $) . Пусть $ F_ {ab} = -F_ {ba} $.
Силы с буквой R впереди являются реактивными — и я построил их из ошибочной необходимости, которую я не могу строго опровергнуть.Если $ A $ тянет за $ B $, то по третьему закону Ньютона $ B $ должен тянуть $ A $, точно так же, как лицо ударяет кулаком, как кулак ударяет по лицу. Это утверждение объясняет принудительное воздействие $ RF_ {ba} $ на $ A $, и та же ошибочная логика применяется к $ B $ и $ RF_ {ab} $. Может ли кто-нибудь выделить ключевые недоразумения, которые вызывают у меня этот странный ход мыслей?
Силы действия и противодействия: Закон и примеры — Урок физики [видео 2021]
Пары сил и третий закон Ньютона
Третий закон Ньютона гласит, что силы всегда действуют парами.Рассмотрим пример мальчика, играющего с игрушкой для собаки, и его иллюстрации. Мальчик действует на игрушку собаки, а игрушка собаки — на мальчика. Эти две силы создают пару взаимодействий . Силы всегда приходят парами, как в этом примере. Рассмотрим мальчика (A) как одну систему, а игрушку (B) как другую. Какие силы действуют на каждую из двух систем? Представьте себе мальчика, тянущего за игрушкой, а игрушку вытаскивают из мальчика. Вы можете видеть, что каждая система воздействует на другую.Две силы — F (A на B) и F (B на A) — это силы взаимодействия между ними. Обратите внимание на симметрию: A на B и B на A.
Силы F (A на B) и F (B на A) представляют собой пару взаимодействий , которая представляет собой набор двух сил, которые направлены в противоположных направлениях, имеют равные величины и действуют на разные объекты. Иногда пару взаимодействия называют парой действие-реакция. Это может означать, что одно вызывает другое; однако это не так.Например, сила, с которой мальчик тянет игрушку, не заставляет игрушку тянуть мальчика. Эти две силы либо существуют вместе, либо не существуют вовсе.
Не может быть единственной силы, действующей в одиночку. Силы приходят только в парах действие-противодействие. Тщательно продумайте, как двигать скейтборд ногой. Ваша ступня отталкивается от земли. Сила действует на землю. Однако вы двигаетесь, поэтому сила должна действовать и на вас. Почему ты переезжаешь? Какая сила действует на вас? Вы двигаетесь, потому что сила воздействия вашей ноги на землю создает силу реакции земли на вашу ногу.Вы «чувствуете» землю, потому что чувствуете силу реакции, давящую на вашу ногу. Сила реакции — это то, что заставляет вас двигаться, потому что она действует на вас.
Третий закон движения Ньютона объясняет, что силы всегда действуют парами действие-противодействие. Третий закон гласит, что для каждой силы действия существует равная и противоположная сила противодействия. Представьте, что вы попадаете в бейсбольный мяч. Бита оказывает на мяч силу. Это сила действия.Мяч оказывает на биту одинаковую и противоположную силу. Это сила реакции. Такая пара взаимодействия — еще один пример третьего закона Ньютона. Бейсбол заставляет биту двигаться в одном направлении, а бита — в противоположном. Эти две силы создают пару взаимодействия на разных объектах, они равны по силе и противоположны по направлению. Сила (F) A (бита) на B (мяч) равна по величине и противоположна по направлению силы B на A: F (A на B) = — F (B на A).
Ньютон понял, что если один объект тянет за другой, второй объект также тянет назад первый объект. Если один объект толкает другой, второй толкает первый объект. Другими словами, на каждое действие одной силы есть противодействие другой силы.
Парные диаграммы действие-реакция
При сортировке сил действия и противодействия полезно рисовать диаграммы. Нарисуйте каждый объект отдельно от другого. Представьте каждую силу в виде стрелки в соответствующем направлении.Рекомендации в этой таблице могут помочь вам разобраться в силах действия и противодействия.
Рассмотрим ситуацию, когда вы держите книгу в руке. Вы можете нарисовать одну схему для себя и одну для книги. Есть ли пары взаимодействия? Вы можете использовать стрелки для обозначения силы и направления силы. В этом случае пара взаимодействия — это сила книги на руке и сила руки на книге.
Примеры действия-реакции
Мы уже рассмотрели некоторые примеры.Но каковы еще примеры действия-противодействия? Посмотрим на ракетный двигатель. Третий закон Ньютона объясняет, как работают ракетные двигатели. Горячие газы вытесняются из задней части ракеты. Это сила действия. Газы действуют на ракету с равной и противоположной силой. Это сила реакции. Реакция толкает ракету вверх и отрывает ее от земли.
Также подумайте, что происходит, когда дайвер прыгает на трамплин? Доска отскакивает и поднимает дайвера в воздух.Сила воздействия на доску со стороны дайвера вызывает силу реакции со стороны доски на дайвера. Сила дайвера на доске равна силе, действующей на доску, и противоположна ей. Подумайте о том, как сила трамплина влияет на работу дайвера. Чем больше сила приложена к трамплину, тем выше будет прыжок.
Наконец, подумайте о том, как команда экипажа использует третий закон движения Ньютона для перемещения лодки.Когда весло опускается в воду, вода оказывает одинаковое усилие на обе стороны весла. Однако, когда участники тянут весла, поверхность их плоской стороны отталкивается от воды. Вода отталкивает весла с равной и противоположной силой. Лодка движется в направлении, противоположном веслам, с силой, равной силе весла, когда они отталкиваются от воды. Лодка движется, потому что силы против нее неуравновешены. Как вы думаете, почему важно, чтобы все члены экипажа одновременно тянули весла? Что ж, если члены экипажа не работают вместе, их собственные силы будут уравновешивать друг друга, уменьшая общую несбалансированную силу, которую они пытаются достичь.
Вращающийся ороситель воды — еще один пример сил действия и противодействия. Вода нагнетается из спринклера. Это действие. Реакция — это движение разбрызгивателей от воды. Вы чувствуете такую же реакцию, когда держите водяной шланг и быстро включаете воду. Возможно, вы видели, как пожарные изо всех сил пытаются контролировать пожарный шланг. Когда вода покидает шланг, его выталкивают назад. Эта реакция затрудняет обращение со шлангом.
Осьминоги и кальмары также используют третий закон движения Ньютона.Осьминог или кальмар передвигается, сначала втягивая воду в свое тело. Затем животное с силой выдавливает воду из своего тела через отверстие за головой. Сила вытесненной воды перемещает животное в противоположном направлении.
Вот последний пример, когда мы думаем о третьем законе Ньютона и о том, что силы действуют в противоположных направлениях; вы только что надули воздушный шар. Сначала держите его отверстием вниз и отпустите. В каком направлении движется воздушный шар? При открытии вниз воздушный шар движется вверх.Снова надуйте шар, держите его горизонтально и отпустите. В каком направлении движется воздушный шар? Воздушный шар будет двигаться горизонтально от конца, из которого выходит воздух. Как бы вы объяснили, почему оба шара не движутся в одном направлении? Направление движения противоположно направлению выходящего воздуха.
Краткое содержание урока
Силы всегда действуют парами. Третий закон Ньютона гласит, что для каждой действующей силы существует равная и противоположная сила противодействия.Пары действие-реакция можно увидеть во всех сферах жизни, от бейсбола и скейтбординга до морских животных и ракетных кораблей. При различении силы действия и противодействия вы можете рассмотреть возможность рисования диаграммы, которая иллюстрирует объекты, на которые действует сила, и направление этих сил.
Третий закон движения Ньютона
- Для каждой силы воздействия существует равная и противоположная сила реакции
- Также называются парами действие-реакция
- Парная диаграмма действие-реакция иногда полезна для определения силы действия и противодействия
Результаты обучения
Когда вы закончите, вы сможете:
- Вспомнить третий закон движения Ньютона
- Объясните взаимосвязь между силами действия и противодействия
- Приведите пример пары действие-противодействие
сила | Определение и формула
Сила в механике — любое действие, которое имеет тенденцию поддерживать или изменять движение тела или искажать его.Концепция силы обычно объясняется в терминах трех законов движения Исаака Ньютона, изложенных в его Principia Mathematica (1687). Согласно первому принципу Ньютона, тело, которое находится в состоянии покоя или движется с постоянной скоростью по прямой линии, будет оставаться в этом состоянии до тех пор, пока к нему не будет приложена некоторая сила. Второй закон гласит, что когда на тело действует внешняя сила, она вызывает ускорение (изменение скорости) тела в направлении силы. Величина ускорения прямо пропорциональна величине внешней силы и обратно пропорциональна количеству вещества в теле.Третий закон Ньютона гласит, что когда одно тело воздействует на другое тело, второе тело оказывает равное усилие на первое тело. Этот принцип действия и противодействия объясняет, почему сила имеет тенденцию деформировать тело (т. Е. Изменять его форму) независимо от того, заставляет ли она двигаться тело. Деформацией тела обычно можно пренебречь при исследовании его движения.
Поскольку сила имеет и величину, и направление, это векторная величина. Представление сил векторами подразумевает, что они сосредоточены либо в одной точке, либо вдоль одной линии.Однако это физически невозможно. Например, на нагруженном компоненте конструкции приложенная сила создает внутреннюю силу или напряжение, которое распределяется по поперечному сечению компонента. Сила тяжести неизменно распределяется по объему тела. Тем не менее, когда равновесие тела является основным соображением, обычно справедливо и удобно предполагать, что силы сосредоточены в одной точке. В случае силы тяжести можно предположить, что общий вес тела сосредоточен в его центре тяжести ( см. центр тяжести).
Две силы, приложенные одновременно к одной и той же точке, имеют тот же эффект, что и одна эквивалентная сила. Результирующую силу можно найти, построив параллелограмм с векторами начальной силы, образующими две смежные стороны. Диагональ параллелограмма дает вектор равнодействующей силы.
Encyclopædia Britannica, Inc.Физики используют ньютон, единицу Международной системы (СИ), для измерения силы. Ньютон — это сила, необходимая для ускорения тела весом один килограмм на один метр в секунду в секунду.Формула F = ma используется для расчета количества ньютонов, необходимых для увеличения или уменьшения скорости данного тела. В странах, все еще использующих английскую систему измерения, инженеры обычно измеряют силу в фунтах. Один фунт силы сообщает объекту весом в один фунт ускорение 32,17 футов в секунду в квадрате.
Произошла ошибка при настройке пользовательского файла cookie
Этот сайт использует файлы cookie для повышения производительности.Если ваш браузер не принимает файлы cookie, вы не можете просматривать этот сайт.
Настройка вашего браузера для приема файлов cookie
Существует множество причин, по которым cookie не может быть установлен правильно. Ниже приведены наиболее частые причины:
- В вашем браузере отключены файлы cookie. Вам необходимо сбросить настройки своего браузера, чтобы он принимал файлы cookie, или чтобы спросить вас, хотите ли вы принимать файлы cookie.
- Ваш браузер спрашивает вас, хотите ли вы принимать файлы cookie, и вы отказались.Чтобы принять файлы cookie с этого сайта, используйте кнопку «Назад» и примите файлы cookie.
- Ваш браузер не поддерживает файлы cookie. Если вы подозреваете это, попробуйте другой браузер.
- Дата на вашем компьютере в прошлом. Если часы вашего компьютера показывают дату до 1 января 1970 г., браузер автоматически забудет файл cookie. Чтобы исправить это, установите правильное время и дату на своем компьютере.
- Вы установили приложение, которое отслеживает или блокирует установку файлов cookie.Вы должны отключить приложение при входе в систему или проконсультироваться с системным администратором.
Почему этому сайту требуются файлы cookie?
Этот сайт использует файлы cookie для повышения производительности, запоминая, что вы вошли в систему, когда переходите со страницы на страницу. Чтобы предоставить доступ без файлов cookie потребует, чтобы сайт создавал новый сеанс для каждой посещаемой страницы, что замедляет работу системы до неприемлемого уровня.
Что сохраняется в файле cookie?
Этот сайт не хранит ничего, кроме автоматически сгенерированного идентификатора сеанса в cookie; никакая другая информация не фиксируется.
Как правило, в файле cookie может храниться только информация, которую вы предоставляете, или выбор, который вы делаете при посещении веб-сайта. Например, сайт не может определить ваше имя электронной почты, пока вы не введете его. Разрешение веб-сайту создавать файлы cookie не дает этому или любому другому сайту доступа к остальной части вашего компьютера, и только сайт, который создал файл cookie, может его прочитать.
Модель сил поясничного отдела позвоночника, предназначенная для анализа, с активными и …
Контекст 1
… Создавая биомеханическую модель, которая представляет силы, действующие на позвоночник, было сделано несколько предположений. Во время определенной физической нагрузки положение туловища будет изменяться, скорее всего, в прогрессивном направлении, или просто сгибаться вперед на угол?, Что вызывает реакцию тела для стабилизации туловища. Этот ответ вызовет сжимающие силы в поясничном отделе позвоночника за счет сокращения мышц живота и спины, как показано на рисунке 2, что приведет к увеличению внутрибрюшного давления (ВБД), а также давления в мышцах спины (ВМП), которое создается жесткостью сокращенных мышц спины. .BMP зависит от уровня сокращения мышц спины, и гипотетически целью является обеспечение механической поддержки. Обе силы давления зависят от размера области, на которую они действуют, они считаются сосредоточенными как результирующие силы в центре каждой области поясничного позвонка и ориентированы перпендикулярно оси позвоночника для простоты анализа. Кроме того, внутрибрюшная полость упрощена и показана эллиптической, что на самом деле, скорее всего, не так. Поясничный сегмент туловища, показанный на рисунке 3, упрощен, с учётом сил, возникающих во время физического эксперимента.Внешние силы имеют отношение к результирующим силам, которые …
Контекст 2
… на поясничном отделе позвоночника и по величине напряжения, которое они создают, но с целью универсального использования этой модели их величина и направление не не имеет первостепенного значения. Они включены в силы поперечного сечения наряду с силами массы верхней и нижней части тела (относительно площадей поперечного сечения). На рисунке 3 представлена модель сил поясничного сегмента позвоночника, изолированная от остального тела.F R, F S и M R — силы реакции на нижнем сечении поясничного отдела позвоночника, F C, F L1 и M L1 — активные силы на верхнем сечении поясничного отдела позвоночника, а G — массовая сила объема поясничного отдела позвоночника. IAP и BMP представляют собой результирующие силы для каждого позвоночного, вызванные ими. Вектор силы тяжести отмечен g. Если нижняя часть зафиксирована, как предполагалось, то F C, F L1 и M L1 состоят из всех внешних и мышечных сил, индуцированных в этой области. Предполагается, что динамические силы равны нулю, поскольку система должна сначала преодолеть статическое равновесие.Также предполагается, что нижняя часть тела зафиксирована. Диапазон движений поясничного отдела позвоночника 72 градуса при фиксированном тазе. Во время повседневной деятельности исправить таз невозможно, но это не входит в объем данного анализа. Уравнения статического равновесия для нашей модели в осевом и перпендикулярном направлениях дают два важных …
IJERPH | Бесплатный полнотекстовый | Удары верхней конечностью по реактивной силе у спортсменов смешанных единоборств во время наземной и ударной тактики
Таблица A1. Биомеханическая толерантность различных областей / костей черепа — сила контакта, необходимая для перелома.
| Область кости | Исследование | Допуск усилия (кН) | Допуск усилия (кг) | Площадь удара (см 2 ) | Н мм −2 / МПа | Вес (кг) | Скорость (м · с −1 ) |
|---|---|---|---|---|---|---|---|
| Фронтальная (лоб) | Schneider and Nahum (1972) | 4,0–6,2 | 6,5 | 1,1–3,8 | 3 6 | ||
| Advani et al.(1975) | 4,0–6,2 | 6,45 | 9,1 | 5–10 | |||
| Nahum et al. (1968) | 4,0–6,2 | ||||||
| Войгт и Томас (1974) | 5.5 | p и другие. (1988) | 2.2–6,4 | 224–662 | |||
| Gadd et al. (1968) | 498 | 7,58 | |||||
| Tarriere et al. (1981) | 7,7 | ||||||
| Ходжсон (1967) | 4,6–8,7 | 2.5–3,3 | |||||
| Cormier et al. (2011) | 2,5–7,6 | 6,45 | 3,2 | ||||
| Височно-теменная | Nahum et al. (1968) Allsop (1991) | 2,5–5,2 | 6,45 | ||||
| Advani et al. (1975) | 5,7 | 9.1 | 5–10 | ||||
| Ходжсон (1967) | 159–454 | 0,9–7,2 | 4 | ||||
| Gadd et al. (1968) | 249 | ||||||
| Raymond et al. (2009) | 5,9 | Снаряд 38,1 мм | 0,10 | 18–37 | |||
| Ходжсон и Томас (1971) | 5.5 | 1,6–4,7 | |||||
| Hodgson (1967) | |||||||
| Боковая область Шнеидера | Боковой регион | и др. (1972)2,0–3,6 | 6,5 | 1,1–3,8 | 3–6 | ||
| Nahum et al. (1968) | 2,0–3,6 | 6.45 | |||||
| Allsop et al. (1988) | 5.2 | ||||||
| Йоганандан и др. (2003) | 5,5–9,9 | 5 | 4,8–7,7 | ||||
| Затылочная область | Advani et al. (1982) | 12,5 | |||||
| Allsop (1991) | 12.5 | ||||||
| Ходжсон (1967) | 15,9 | 3,7 | |||||
| 9023 Сталь (1977) | 7,1 | Диаметр 15,2 см | 10 | 6,8–7,2 | |||
| Os zygomaticum | Advani et al. (1982) | 1.0 | 6.45 | ||||
| Nahum et al. (1968) | 1,0 | 1,38–4,17 | |||||
| Найквист и др. (1986) | 0,4 | 2,54 | 2,7–7,2 | ||||
| Ходжсон (1967) | 159–454 | 2.Диаметр 54–13,2 см | 0,9–7,2 | 4 | |||
| Gadd et al. (1968) | 225 | ||||||
| Allsop et al. (1988) | 0,8–2,4 | 90–244 | |||||
| Йоганандан и др. (1991) | 1,1–1,3 | 4 | |||||
| Gallup (1988) | 3.2–3,8 | 335–394 | |||||
| Мандибула | Nahum et al. (1968) | 1,4 | 6,45 | ||||
| Ходжсон (1967) | 159–454 | 2,54–13,2 см диаметр | 9007– | 4 | |||
| Найквист и др. (1986) | 0.6 | 2,54 | 2,7–7,2 | ||||
| Шнайдер и Наум (1972) | 2,76–6,20 | 1,1–3,8 | |||||
| Os nasale | Nyquist et al. (1986) | 0,3 | 306 | 2,54 | 2,7–7,2 | ||
| Ходжсон (1967) | 159–454 | 2.Диаметр 54–13,2 см | 2,5–3,7 | ||||
| Gallup (1988) (область носа) | 1,9–2,9 | 200–299 | |||||
| Swearingen (1965) | 0,3–4,5 | ||||||
| Nahum et al. (1968) | 0.13–0,34 | ||||||
| Верхняя челюсть | Nahum et al. (1968) Advani et al. (1982) | 0,7–1,5 | 6,45 | ||||
| Найквист и др. (1986) | 1,4 | 2,54 | |||||
| Ходжсон (1967) | 0,6–1,8 | 159–454 | 2,54–13.Диаметр 2 см | ||||
| Allsop et al. (1988) | 1,0–1,8 | 102–184 | |||||
| Наум и др. (1968) Шнайдер и Наум (1972) | 1,03–2,07 | 1,1–3,8 | 3–6 |
Таблица A2. Среднее значение максимальной силы прямого удара и удара ладонью и стандартное отклонение.
| Название забастовки | Автор | F MEAN (N) | SD | Количество испытуемых | Опыт |
|---|---|---|---|---|---|
| Удар ладонью | Neto et al. (2012) | 1706,14 | 557,03 | 7 | ЭКСПЕРТ: 4 МУЖЧИНЫ, 3 ЖЕНЩИНЫ |
| Нето и др. (2009) | 930,00 | 301,00 | 13 | СМЕСЬ: 10 МУЖЧИН, 3 ЖЕНЩИНЫ | |
| Нето и др.(2008) | 355,00 | 96,50 | 13 | ЭКСПЕРТ: 7 МУЖЧИНЫ; НОВИНКА: 6 МУЖЧИНЫ | |
| Bolander et al. (2009) | 736 | 159 | 13 | ЭКСПЕРТ: 10 МУЖЧИН, 3 ЖЕНЩИНЫ | |
| Это исследование (полное) | 4131.20 | 1747.03 | 91 | РАСШИРЕННАЯ = 81 | |
| Это исследование (сокращено) | 4121.91 | 1658.01 | |||
| Прямой пуансон | Walilko et al. (2005) | 3427.00 | 811.00 | 7 | ЭКСПЕРТ, МУЖЧИНЫ |
| Rat Tong Iam et al. (2017) | 1323,30 | 278,50 | 3 | ЭКСПЕРТ, МУЖЧИНЫ | |
| Loturco et al. (2016) | 1152,22 | 246,87 | 15 | ЭКСПЕРТ: 9 МУЖЧИН, 6 ЖЕНЩИН | |
| Чадли и др.(2014) | 989,00 | 116,70 | 11 | ЭКСПЕРТ, МУЖЧИНЫ | |
| Busko et al. (2016) | 1592,50 | 507,10 | 48 | ЭКСПЕРТ: 21 МУЖЧИНА, 27 ЖЕНЩИН | |
| Бингуль и др. (2017) | 1987,42 | 341,95 | 10 | ЭКСПЕРТ, МУЖЧИНЫ | |
| Pierce et al. (2016) | 1149.20 | 665,80 | 12 | ЭКСПЕРТ, МУЖЧИНЫ | |
| Это исследование (полное) | 2971.85 | 1603.80 | 91 | ADVANCED = 81 PROFESSIONAL = 10 | |
| Это исследование (сокращенное) | 1445,88 |
Allsop, D.C .; Warner, M.W .; Schneider, D .; Наум, А. Реакция на лицевой удар — сравнение манекена-гибрида iii и трупа человека. J. Passeng. Автомобили 1988 , 97, 1224–1240.
Allsop, D .; Perl, T.R .; Warner, C.Y. Характеристики силы / прогиба и перелома височно-теменной области головы человека.В материалах 35-й конференции по автокатастрофам Стаппа, Детройт, штат Мичиган, США, 1991; С. 269–278.
Advani, S .; Пауэлл, Вт .; Huston, J .; Ойала, С. Экспериментальные данные и аналитическое моделирование реакции головы человека на удар. В материалах Международной конференции по биомеханике удара (IRCOBI), Берлин, Германия, 1975 г .; С. 153–162.
Advani, S.H .; Оммая, А.К .; Ян, В.Дж. Динамика человеческого тела; Кларедон: Оксфорд, Великобритания, 1982 г.
Адамек, Дж.; Mai, V .; Graw, M .; Schneider, K .; Hempel, J.-M .; Шёпфер, Дж. Биомеханика и риск травм от удара головой. Int. J. Legal Med. 2013 , 127, 103–110.
Cormier, J .; Manoogian, S .; Bisplinghoff, J .; Rowson, S .; Santago, A .; McNally, C .; Дума, С .; Болте, Дж. Толерантность лобной кости к тупому удару. J. Biomech. Англ. 2011 , 133 (2), 021004. doi: 10.1115 / 1.4003312, 2011.
Schneider, D.C .; Наум, А. Ударные исследования лицевых костей и черепа.В материалах 16-й конференции по автокатастрофам Стаппа, Детройт, штат Мичиган, США, 1972; С. 186–203.
Swearingen, J.J. Устойчивость человеческого лица к столкновению с аварией; Федеральное авиационное агентство, Институт гражданских аэромедицинских исследований: Оклахома-Сити, Оклахома, США, 1965.
Gallup, B.M .; Hallgrimson, B.H .; Cotton, C.E .; Smith, T.A .; Ньюман, Дж. Разработка усовершенствованной формы бусинок ATD с хрупкой лицевой вставкой; LR.C.O.B.I .: Бергиш-Гладбах, Германия, 1988.
Gadd, C.W .; Nahum, A.M .; Gatts, J .; Дэнфорд, Дж. П. Исследование устойчивости к ударам головы и лицевых костей. В Proc. G.M .; Семинар по автомобильной безопасности: Детройт, США, 1968.
Nahum, A.M .; Gatts, J.D., Gadd, C.W .; Данфорт, Дж. П. Устойчивость к ударам лица и черепа. В материалах 12-й конференции по автокатастрофам Стаппа, Детройт, штат Мичиган, США, 1968 г .; С. 302–317.
Хэмпсон Д. Лицевая травма: обзор биомеханических исследований и процедур тестирования для оценки лицевых травм. Дж.Биомех. 1995 , 28 (1), 1–7. DOI: 10.1016 / 0021-9290 (95) 80001-8.
Ходжсон, В. Устойчивость лицевых костей к ударам. Являюсь. J. Anat. 1967 , 120, 113–122.
Hodgson, V.R .; Томас, Л.М.Сравнение показателей травмы, вызванной ускорением головы, при переломах трупного черепа. SAE Tech. Пап. 1971 , 80, 710619–710867. DOI: 10,4271 / 710854.
Nyquist, G.W .; Cavanaugh, J.M .; Goldberg, S.J .; Кинг, А. Устойчивость к ударам лица и реакция.В материалах 30-й конференции по автокатастрофам Стаппа, Детройт, штат Мичиган, США, 1986; С. 379–400.
Voigt, R .; Томас, Л.М. Разрывная сила человеческого черепа по сравнению с кривизной ударной поверхности; Школа медицины, кафедра нейрохирургии, Государственный университет Уэйна, Детройт, Мичиган, США, 1974.
Tarriere, C .; Leung, Y.C .; Fayon, A .; Получил, C .; Patel, A .; Банзет П. Полевые травмы лица и исследование их моделирования с помощью манекена. В Proc. 25-я конференция по автокатастрофам Stapp, Сан-Франциско, США, 1981.
Raymond, D .; Van Ee, C .; Crawford, G .; Бир, К. Толерантность черепа к тупым баллистическим височно-теменным ударам. J. Biomech. 2009, 42 (15), 2479–2485. DOI: 10.1016 / j.jbiomech.2009.07.018.
Stalnaker, R.L .; Мелвин, JW .; Nusholtz, G.S .; Alem, N.M .; Бенсон, Дж. Реакция на удар головой. SAE Tech. Пап. 1977 , 770921. doi.org/10.4271/770921.
Свобода, М .; Soukup, J .; Jelen, K .; Кубовы П. Измерение силы удара у спортсменов-тхэквондистов с оценкой возможности травмы головы человека.Разработка процедур 2016 , 136 211–215. DOI: 10.1016 / j.proeng.2016.01.199, 2016.
Siswanto, W.A .; Хуа К.С. Анализ прочности человеческого черепа при высокоскоростном ударе. Int. Преподобный мех. Англ. 2016 , 6 (7), 1508–1514.
Yoganandan, N .; Пинтар, Ф .; Сансес, А. Биодинамика травм лица, вызванных рулевым колесом. J. Safety Res. 1991, 22, 179–190.
Yoganandan, N .; Zhang, J .; Pintar, F.A .; Gennarelli, T.A .; Куппа, С.М .; Эппингер, Р. Х. Биомеханика бокового перелома черепа, В материалах конференции IRCOBI, Лиссабон, Португалия, 2003.
Yoganandan, N .; Пинтар Ф.А.Биомеханика височно-теменного перелома черепа. Clin. Биомех. 2004 , 19 (3), 225-239. DOI: 10.1016 / j.clinbiomech.2003.12.014.
Произошла ошибка при настройке пользовательского файла cookie
Этот сайт использует файлы cookie для повышения производительности. Если ваш браузер не принимает файлы cookie, вы не можете просматривать этот сайт.
Настройка вашего браузера для приема файлов cookie
Существует множество причин, по которым cookie не может быть установлен правильно. Ниже приведены наиболее частые причины:
- В вашем браузере отключены файлы cookie. Вам необходимо сбросить настройки своего браузера, чтобы он принимал файлы cookie, или чтобы спросить вас, хотите ли вы принимать файлы cookie.
- Ваш браузер спрашивает вас, хотите ли вы принимать файлы cookie, и вы отказались. Чтобы принять файлы cookie с этого сайта, используйте кнопку «Назад» и примите файлы cookie.
- Ваш браузер не поддерживает файлы cookie. Если вы подозреваете это, попробуйте другой браузер.
- Дата на вашем компьютере в прошлом. Если часы вашего компьютера показывают дату до 1 января 1970 г., браузер автоматически забудет файл cookie. Чтобы исправить это, установите правильное время и дату на своем компьютере.
- Вы установили приложение, которое отслеживает или блокирует установку файлов cookie. Вы должны отключить приложение при входе в систему или проконсультироваться с системным администратором.
Почему этому сайту требуются файлы cookie?
Этот сайт использует файлы cookie для повышения производительности, запоминая, что вы вошли в систему, когда переходите со страницы на страницу. Чтобы предоставить доступ без файлов cookie потребует, чтобы сайт создавал новый сеанс для каждой посещаемой страницы, что замедляет работу системы до неприемлемого уровня.
Что сохраняется в файле cookie?
Этот сайт не хранит ничего, кроме автоматически сгенерированного идентификатора сеанса в cookie; никакая другая информация не фиксируется.
Как правило, в файле cookie может храниться только информация, которую вы предоставляете, или выбор, который вы делаете при посещении веб-сайта. Например, сайт не может определить ваше имя электронной почты, пока вы не введете его. Разрешение веб-сайту создавать файлы cookie не дает этому или любому другому сайту доступа к остальной части вашего компьютера, и только сайт, который создал файл cookie, может его прочитать.
.