Как алгоритмическая температурная компенсация повышает точность измерений датчиков угловой скорости. Какие методы компенсации применяются в современных гироскопах. Какие преимущества дает использование специальных генераторных катушек.
Принцип работы динамически настраиваемого гироскопа
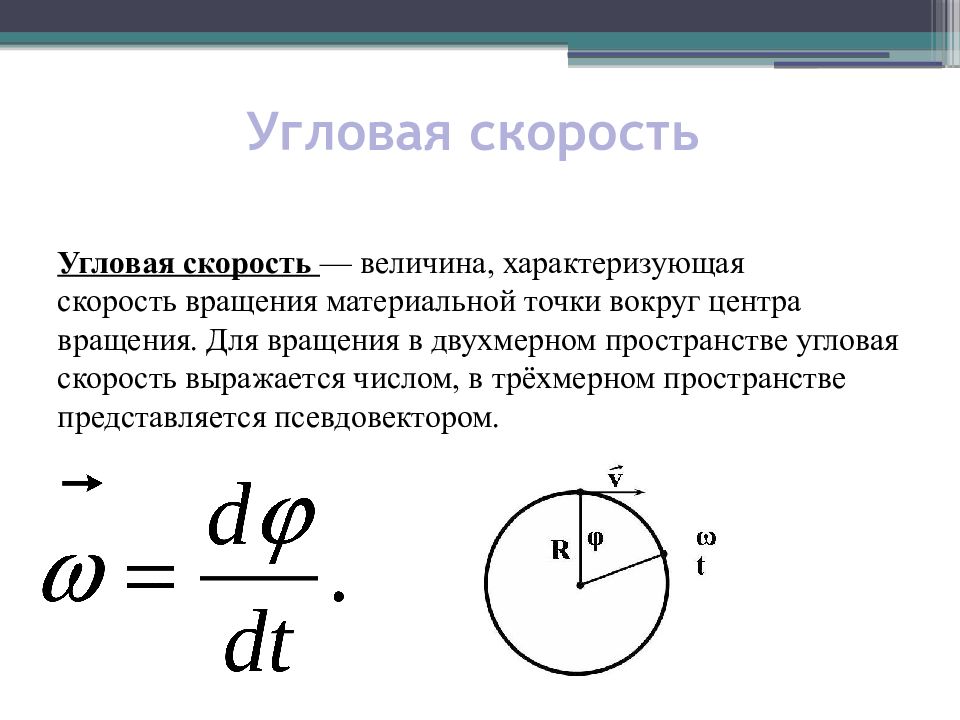
Динамически настраиваемый гироскоп (ДНГ) является одним из ключевых элементов систем измерения угловой скорости подвижных объектов. Его основными компонентами являются:
- Ротор, вращающийся с высокой скоростью
- Упругий подвес, обеспечивающий ротору две степени свободы относительно оси вращения
- Датчик угла для измерения отклонений ротора
- Датчик момента для создания управляющих воздействий
Принцип работы ДНГ основан на прецессии ротора под действием измеряемой угловой скорости. Величина прецессии пропорциональна входной угловой скорости, что позволяет использовать ДНГ в качестве измерителя.
Проблема температурной зависимости характеристик ДНГ
Одной из ключевых проблем, ограничивающих точность ДНГ, является температурная зависимость его характеристик. Основные источники температурных погрешностей:
- Изменение магнитных свойств постоянных магнитов датчика момента
- Температурные деформации конструкции
- Изменение параметров электронных компонентов
Эти факторы приводят к изменению масштабного коэффициента и смещению нуля гироскопа при колебаниях температуры. В результате возникают ошибки измерения угловой скорости, достигающие нескольких процентов.
Традиционные методы температурной компенсации
Для борьбы с температурными погрешностями в ДНГ применяются различные методы:
- Термостатирование прибора с помощью нагревателей
- Использование материалов с низким температурным коэффициентом расширения
- Алгоритмическая компенсация по показаниям встроенных термодатчиков
Однако эти методы имеют ряд недостатков. Термостатирование увеличивает время готовности прибора и энергопотребление. Применение специальных материалов удорожает конструкцию. Алгоритмическая компенсация по термодатчикам не учитывает температурные градиенты внутри прибора.
Инновационный подход к температурной компенсации
Предлагаемое изобретение реализует принципиально новый подход к температурной компенсации ДНГ. Его ключевые особенности:
- Специальная конструкция магнитной системы датчика угла и момента с пазами на магнитах
- Введение дополнительных генераторных катушек в рабочий зазор
- Формирование сигнала, пропорционального текущей магнитной индукции в зазоре
Такая схема позволяет напрямую измерять изменения магнитных характеристик системы при колебаниях температуры и вносить соответствующие поправки в выходной сигнал гироскопа.
Особенности конструкции инновационного ДНГ
Ключевые элементы конструкции предлагаемого ДНГ:
- Два кольцевых магнита с радиальным направлением намагничивания
- Пазы на торцах магнитов, создающие модуляцию магнитного поля
- Катушки датчика момента над сплошной частью магнитов
- Катушки датчика угла над зоной пазов
- Дополнительные генераторные катушки в рабочем зазоре
Такая конфигурация обеспечивает эффективную работу всех элементов и позволяет реализовать новый метод температурной компенсации.
Принцип работы системы температурной компенсации
Работа системы температурной компенсации основана на следующих принципах:
- Пазы на магнитах создают периодическую модуляцию магнитного поля в зазоре
- В генераторных катушках наводится ЭДС, пропорциональная магнитной индукции
- Амплитуда сигнала с генераторных катушек отражает текущее состояние магнитной системы
- Изменение амплитуды при колебаниях температуры используется для коррекции выходного сигнала
Данный метод позволяет в реальном времени отслеживать изменения характеристик магнитной системы и вносить соответствующие поправки.
Преимущества нового метода температурной компенсации
Предложенный метод температурной компенсации обладает рядом важных преимуществ:
- Высокая точность компенсации температурных погрешностей
- Отсутствие необходимости в термостатировании
- Компенсация эффектов старения магнитных материалов
- Сокращение времени готовности прибора
- Увеличение межрегламентного периода
Все это позволяет существенно повысить точностные характеристики и надежность измерителей угловой скорости на базе ДНГ.
Температурная компенсация: Ключ к точным измерениям
При выборе правильного датчика температуры, знания о повышении температуры являются ключевыми. Если используемая технология измерения не имеет правильной температурной компенсации, то возможно возникновение серьезных неточностей в измерениях и других рисков.
Таким образом, конечный пользователь должен знать заранее диапазон температур в предполагаемой среде использования прибора. Существует два значения, которые необходимо принять во внимание в данном случае: температуру среды и температуру окружающего воздуха. Оба эти значения важны. Температура среды — это значение, при котором происходит взаимодействие с каналом нагнетания. Однако, температура среды – это значение, которое влияет на электрические подсоединения. Оба значения могут сильно отличаться друг от друга, а также, от каждого из них разные последствия.
Почему температура является важным фактором?
Материалы, используемые для создания пьезорезистивных датчиков давления имеют определенную температурную зависимость (получить более подробную информацию о термических характеристиках пьезорезистивных датчиков давления можно здесь ). Поведение датчика при измерении также меняется с переменой температуры. Как результат, сдвиг нуля и амплитуда, связанные с температурой — возрастут. Выражаясь простым языком, если давление 10 бар достигается при температуре 25 °C, а затем, во второй раз при температуре 100 °C, будут получены различные значения измерений. Для пользователей, изучающих спецификацию, это означает, что великолепные коэффициенты точности на самом деле фактически не приносят никакой пользы, в то время как сама температурная компенсация остается несущественной.
Во избежание серьезных ошибок при осуществлении измерений, механическая работа измерительного прибора также зависит от текущей температуры. Это в основном влияет на компоненты, такие как электрические подсоединения и кабели, используемые для передачи измеренных значений. Всего несколько из стандартных материалов могут выдержать воздействие окружающей температуры, тем более, если температура 100 °C. Кабельные клеммы и сами кабели могут расплавиться или даже возгореться. Кроме того, точность измерения, температура, также влияют на безопасность рабочего процесса.
К счастью, пользователи могут избежать выше описанных рисков, так как датчики давления можно оптимизировать для различных температурных условий – с одной стороны, с помощью температурной компенсации, а с другой стороны – используя дополнительные охлаждающие элементы, а особенно, термо-устойчивые материалы.
Возможность избежать образование температурной погрешности
Производители датчиков давления используют компенсацию влияния температуры. Продукты от STS, например, имеют стандартные настройки для работы при температурах от -0 °C до 70 °C. Чем больше температура отклоняется от выше заданных параметров, тем больше будет погрешность в измерениях. Измерительный прибор, который оптимизирован для работы при диапазоне от 0 °C до 70 °C, но используется при температуре около100 °C, не сможет выдавать точные результаты как было заявлено. В данном случае, необходимо установить датчик, который может компенсировать температуры до 100 ° C.
Существует два вида термокомпенсации:
- Пассивная компенсация: сопротивление, зависящее от температуры, активируется на измерительном мосту Уитстона (мост для измерения сопротивлений постоянному току)
- Активная компенсация (полиномная компенсация): различное давление достигается при возрастающих температурах внутри термошкафа. Затем, полученные данные сравниваются со значениями калибровочных стандартов. Температурные коэффициенты, определенные после проведения выше описанных действий, вводятся во встроенную память датчика давления, итак, температурная погрешность на практике может быть компенсирована активным образом.
Активная компенсация температуры остается самым предпочитаемым методом, потому что она приводит к получению самых точных результатов.
Сама термокомпенсация, с одной стороны, не имеет ограничений. Как было указано ранее, температура влияет не только на точность предоставляемых датчиком давления измерений. Механические компоненты измерительной ячейки подвергаются негативному воздействию температуры 150 °C. При наличии такой температуры, контакты и заземляющие перемычки ослабляются, и происходит повреждение датчика. Если при осуществлении измерений ожидается воздействие особо высоких температур, то будет необходимо использование дополнительных охлаждающих элементов, для правильной работы прибора.
Охлаждающие элементы при наличии высоких температур среды
Для защиты датчика от высоких температур существует четыре варианта в зависимости от сферы применения и температуры.
Вариант A: Температура среды около 150 °C
В данном варианте, охлаждающий элемент встраивается между измерительной ячейкой и расширителем. Это делается для ограждения электроники от среды, таким образом, последняя продолжает работать без повреждений при повышении температуры.
Вариант B: температуры выше 150 °C
При работе в средах с высокими температурами, охлаждающий элемент прикручивается на переднюю часть напорного отверстия (охлаждающие ребра, например, которые можно прикрутить с обеих сторон). Таким образом, напорное отверстие теперь вступает в контакт, но только теперь — с охлажденной средой. Такие охлаждающие элементы не влияют на точность предоставляемых прибором измерений. Если средой является очень горячий пар, тогда следует использовать сифон как охлаждающий элемент.
Вариант C: экстремально высокие температуры (до 250 °C)
При наличии экстремально высокой температуры среды, следует использовать как охлаждающий элемент направленную вперед изоляционную систему, имеющую охлаждающую секцию в своей конструкции. Однако, такая система имеет довольно крупные размеры и может негативно сказаться на точности измерений.
Датчик с изолятором и охлаждающей секцией подходит для температур выше 250 °C
В случае, когда необходимо произвести измерение давления в тепловом шкафу при температуре среды до 150 °C, электронику датчика давления нельзя подвергать воздействию температуры, так как повреждения будут неизбежны. Таким образом, только измерительная ячейка (с напорным отверстием и корпусом из нержавеющей стали) должна быть расположена внутри теплового шкафа, а электроника должна быть подключена дистанционно за пределами шкафа (она также должна находиться в корпусе из нержавеющей стали) с помощью фторированного этилен-пропиленового кабеля, выдерживающего воздействие высоких температур.
Итоги: правильная консультация – ключ к верному выбору оборудования
Точность пьезорезистивных датчиков давления напрямую зависит от температурного воздействия. Температурное воздействие на напорное отверстие может быть компенсировано пассивным или активным образом, таким образом, используемый прибор будет отвечать требованиям касательно получения максимально точных измерений по всему заданному температурному диапазону. Более того, учитывается влияние температуры среды на механические компоненты измерительного прибора. Необходимо проконтролировать использование предварительно вмонтированных охлаждающих элементов и устойчивых к тепловому воздействию материалов. Таким образом, пользователь всегда должен полагаться на инструкции от производителя и убедиться, что доступные датчики давления возможно оптимизировать в соответствии с выдвигаемыми требованиями.
Температурная компенсация в портативной метрологии
Изменения окружающей температуры и температуры измеряемых деталей оказывают видимое влияние на большинство распространенных промышленных материалов, таких как сталь или алюминий. Именно по этой причине для получения наилучших результатов наиболее точные измерения с применением больших автоматических КИМ, таких как Globals и PMM, выполняются в помещениях с контролируемой температурой и даже с использованием датчиков, измеряющих температуру детали.Тем не менее, конструкция портативных измерительных систем, таких как лазерные трекеры Leica и портативные манипуляторы ROMER, допускает перемещение их непосредственно к измеряемой детали, а не наоборот. В большинстве случаев производственные условия в цехах не отличаются хорошей регулировкой температуры, если таковая вообще проводится. Это может вызвать вопросы, следует ли учитывать тепловое расширение деталей при выполнении измерений с помощью портативных инструментов, и если да, то как?.
Портативные измерительные системы и программные пакеты могут иметь различные инструменты для обработки температурных изменений. Это могут быть:
1. Контрольные шкалы, выполненные из того же материала, что и измеряемая деталь (такая технология пришла к нам из теодолитных измерительных систем).
2. Другая подобная технология состоит в том, чтобы измерить две точки на инструменте и сообщить измерительной системе «известное» расстояние между этими двумя точками. Это — вариант метода измерительной линейки.
3. Температура материала может быть измерена в различных точках на протяжении измерительного цикла и зарегистрирована системным программным обеспечением с помощью инструмента, который компенсирует “CTE”(коэффициент теплового расширения) путем внесения расчетных изменений в «шкалу» данных измерения.
4. Можно измерить количество точек, для которых уже имеются «номинальные» данные измерений. С помощью алгоритма «наилучших приближений» программное обеспечение рассчитывает изменение по «шкале» измеренных данных.
Все эти методы имеют свои ограничения. Если мы измеряем только твердые блоки из известного материала, этот метод температурной компенсации будет работать хорошо. В этом случае изменения размеров будут «линейными», и поэтому дадут «превосходный» результат расчета CTE, который компенсирует тепловые изменения детали.
Однако, в реальном мире мы обычно не измеряем однородные блоки материалов. В случае портативной метрологии мы часто измеряем крупные детали, обрабатываемые, свариваемые, соединяемые болтами, сцепляемые и скрепляемые с другим деталями, выполненными из того же или другого материала. В таких сочетаниях материалов или расположении деталей из разных материалов перемещения, вызываемые тепловым расширением или сжатием, меняют свое направление. В реальности объекты не расширяются и не сжимаются линейно, они скручиваются или изгибаются или деформируются тем или иным образом. Поэтому мы не можем автоматически принять, что компенсация CTE — наилучший способ, который описывает то, что происходит во время теплового цикла.
Другими словами, метод температурной компенсации имеет присущие недостатки, обусловленные сложностью реального мира. В действительности, когда мы производим компенсацию температурных изменений, мы, возможно, вносим погрешность, которая больше той, которую мы удалили. Некоторые операторы, зная об этом, просто игнорируют температуру объекта и не делают никаких попыток корректировать тепловые изменения.
Кроме физического контроля окружающей среды, в которой проводятся измерения, не существует хорошего решения для компенсации температуры. В большинстве случаев расчет на шкалах, выполняемый по методу наилучшего совпадения, дает наилучшие результаты. Однако это верно не всегда; могут оказаться другие обстоятельства, о которых оператор должен знать. Опытный оператор портативных измерительных средств будет помнить о тепловых свойствах при разработке плана измерения конкретной детали, оценивая размер, материал и конструкцию измеряемого объекта.
Оператор должен также оценить параметры окружающей среды, такие как близость к источникам тепла и возможные изменения температуры воздуха и детали на протяжении процесса измерения. Можно получить ряд измерений и сравнить их с номинальными значениями или со значениями, полученными ранее. Всегда рекомендуется попробовать различные методы температурной компенсации и определить лучший для данной задачи измерения. Главное же состоит в том, что опытный оператор будет тщательно документировать свою методологию и окончательные процедуры проверки, чтобы те, кто будет интерпретировать результаты его измерений, имели полную информацию, которая им необходима.
Динамически настраиваемый гироскоп
Изобретение относится к гироскопической технике и может быть использовано для измерения абсолютной угловой скорости подвижных объектов. Сущность изобретения заключается в том, что динамически настраиваемый гироскоп содержит магниты, при этом на торцах магнитов, обращенных друг к другу, выполнены пазы, стороны катушек датчика момента, протекание тока в которых создает управляющий момент, расположены над сплошными частями магнитов, стороны катушек датчика угла, в которых формируется сигнал об угловых отклонениях ротора, расположены над пазами в магнитах, в рабочий зазор магнитной системы помещены генераторные катушки прямоугольной формы, соединенные последовательно и расположенные парами в два ряда над кольцевыми магнитами так, что они не выходят за пределы магнитной системы ротора датчика угла и момента, а оси каждого ряда находятся над пазами в соответствующем магните. Технический результат – повышение точности измерения абсолютной угловой скорости, увеличение диапазона измеряемых угловых скоростей. 6 ил.
1 Область техники, к которой относится изобретение
Изобретение относится к гироскопической технике и может быть использовано для измерения абсолютной угловой скорости подвижных объектов — самолетов, ракет, морских судов.
Одной из важнейших задач, решаемых системами управления подвижными объектами, является измерение их абсолютной угловой скорости. Для этого используются измерители угловой скорости (ИУС) на базе динамически настраиваемых гироскопов (ДНГ). Совершенствование систем управления ставит перед разработчиками ДНГ цель: повышение точности измерения абсолютной угловой скорости, увеличение диапазона измеряемых угловых скоростей, сокращение времени готовности, увеличение межрегламентного периода.
2 Уровень техники
Рассмотрим аналоги предлагаемого изобретения.
2.1 Библиографические данные аналогов изобретения
[1] Гироскопические системы, ч. 2 под редакцией Д.С. Пельпора. М.: Высшая школа, 1988, стр. 147-169.
[2] G01C 19/02. Гироскоп. Патент RU 2298151. Авторы Баженов В.И., Будкин В.Л., Виноградов Г.М., Темляков Н.А., Фурман Е.В., Ягупова Е.И.
[3] В.Э. Джашитов, В.М. Панкратов. Датчики, приборы и системы авиакосмического и морского приборостроения в условиях тепловых воздействий. Под общ. ред. академика РАН В.Г. Пешехонова. — СПб.:ГНЦ РФ ЦНИИ «Электроприбор», 2005, стр. 122.
[4] G01P 15/13. Акселерометр компенсационного типа. Патент RU 2434233. Авторы Рязанов А.А., Козлов И.Ю., Гусев А.Н., Чемоданов А.Ю.
[5] G01C 19/02. Устройство и способ измерения абсолютной угловой скорости. Патент RU 2621642. Авторы Губко В.П., Киляков А.Н.
[6] G01C 19/22. Pick off, torquer, and reference signal generator for free rotor gyroscopes. Патент США №4487083. Авторы Thomas R. Quermann, Suffolk, N.Y.
2.2 Известны динамически настраиваемые гироскопы [1], применяемые в измерителях абсолютной угловой скорости. Общими признаками с заявляемым устройством являются двигатель, вал, упругий подвес, магнитоэлектрический датчик момента (ДМ). Недостатком данного устройства является наличие погрешности масштабного коэффициента, вызванной изменением коэффициента передачи ДМ при изменении температуры окружающей среды. Основная доля этой погрешности обусловлена изменением характеристик постоянных магнитов, входящих с конструкцию ДМ, при изменении температуры. Для уменьшения данной погрешности применяют термостатирование ДНГ при помощи нагревателей, расположенных на наружной поверхности корпуса прибора [2]. Недостатком данного технического решения является длительное время готовности прибора. Для сокращения времени готовности применяют алгоритмическую компенсацию температурной погрешности масштабного коэффициента по показаниям термодатчиков, встроенных во внутреннюю полость прибора [3], [4]. Недостатком таких устройств является погрешность, обусловленная отличием температуры термодатчиков от температуры магнита магнитоэлектрического датчика вследствие наличия температурных градиентов во внутренней полости прибора в переходных тепловых режимах работы, а также погрешность, обусловленная старением магнитов — изменением их коэрцитивной силы в течение срока службы прибора, что вызывает необходимость проведения регулярных регламентных проверок для уточнения коэффициентов математической модели температурной зависимости масштабного коэффициента. Для точной компенсации погрешности масштабного коэффициента необходим сигнал, амплитуда которого была бы прямо пропорциональна индукции в рабочем зазоре магнитоэлектрического датчика момента (ДМ) ДНГ. Получить такую информацию можно с помощью дополнительной сигнальной (генераторной) обмотки, помещенной в рабочий зазор магнитной системы ДМ. Дополнительные сигнальные обмотки имеются в устройстве по патенту [5], однако данные обмотки в представленной схеме включения выполняют функции датчика угла (ДУ), т.е. сигнал с обмоток прямо пропорционален углу отклонения ротора от нулевого положения и при работе ДНГ в режиме электрической пружины близок к нулю, поэтому не может быть использован для индикации изменений магнитной индукции в рабочем зазоре датчика момента.
Наиболее близким к заявляемому изобретению аналогом (прототипом) является устройство по патенту США №4487083 [6]. Общими признаками с предлагаемым изобретением являются: корпус, приводной вал, расположенный в корпусе на шарикоподшипниках, ротор, вращающийся вокруг оси вращения вала, упругий подвес, передающий вращение от вала к ротору и обеспечивающий ему две угловые степени свободы относительно вала, кольцевой постоянный магнит, установленный на роторе и намагниченный в радиальном направлении, обеспечивающий в кольцевом канале между магнитом и ротором магнитную индукцию, регулярно изменяющуюся от минимальной до максимальной величины несколько раз за один оборот ротора, катушки, образующие статор двухкоординатного датчика угла, момента и генератора опорного сигнала, установленный на корпусе и вставленный в кольцевой канал ротора, а также двигатель, состоящий из ротора и статора.
Данный прототип имеет следующие недостатки.
А. Создание изменяющейся магнитной индукции в кольцевом канале ротора в прототипе осуществляется путем неравномерного намагничивания кольцевого магнита, т.е. намагниченные участки в нем чередуются с не намагниченными. Это приводит к снижению средней магнитной индукции в рабочем зазоре ДМ и уменьшению диапазона измеряемых угловых скоростей.
Б. Имеющиеся в прототипе катушки генератора опорного сигнала не представляется возможным использовать для определения изменений магнитной индукции в рабочем зазоре датчика момента в силу влияния на амплитуду выходного сигнала генератора взаимного положения ротора и статора. Данная зависимость обусловлена тем, что в прототипе катушки генератора лишь частично погружены в магнитное поле ротора, а от глубины погружения зависит амплитуда ЭДС, индуцируемой в этих катушках. Изменение глубины погружения катушек может возникать при изменении температуры прибора, наличии температурных градиентов в конструкции, релаксации конструкции в течение срока службы. Так перемещение ротора относительно статора в осевом направлении на 0,001 мм приведет к изменению амплитуды выходного сигнала генератора на 0,05%, что недопустимо для создания высокоточного измерителя абсолютной угловой скорости.
3 Раскрытие изобретения
3.1 Техническим результатом предлагаемого изобретения является повышение точности измерения абсолютной угловой скорости, увеличение диапазона измеряемых угловых скоростей.
Технический результат достигается совокупностью существенных признаков:
— выполнением магнитов датчика угла и момента (ДУМ) в виде двух колец, равномерно намагниченных в радиальном направлении и имеющих на торцах специальные пазы;
— расположением рабочих ветвей катушек ДМ над монолитной зоной кольцевых магнитов, а рабочих ветвей катушек ДУ — над зоной пазов в магнитах;
— введением в статор ДУМ специальных катушек, полностью погруженных в магнитное поле ротора, в которых генерируется ЭДС, прямо пропорциональная магнитной индукции в рабочем зазоре ДУМ.
Сущность изобретения заключается в том, что создание модуляции магнитного поля в рабочем зазоре ДУМ при помощи специальных пазов на торцах двух кольцевых магнитов и введение в конструкцию статора ДМ специальных катушек позволяет с высокой точностью осуществить компенсацию погрешности масштабного коэффициента измерителя абсолютной угловой скорости, увеличить диапазон измеряемых угловых скоростей.
3.2 Заявляемое изобретение направлено на решение следующих задач:
— увеличение магнитной индукции в зоне расположения рабочих ветвей катушек ДМ;
— создание генератора сигнала, амплитуда которого прямо пропорциональна магнитной индукции в рабочем зазоре датчика момента в данный момент времени и не зависит от взаимного положения ротора и статора.
Для решения 1-й задачи кольцевые магниты ДУМ равномерно намагничены по длине окружности, а на их торцах выполнены специальные пазы, рабочие ветви катушек ДМ располагаются над монолитной частью кольцевых магнитов (в зоне равномерного магнитного поля), а катушки ДУ -над пазами (в зоне переменного по окружности рабочего зазора магнитного поля). Для решения 2-й задачи в статор ДУМ введены специальные катушки, работающие в зоне переменного по окружности рабочего зазора магнитного поля, создаваемого пазами в магнитах. Решение этих задач обеспечивает повышение точности измерения абсолютной угловой скорости, увеличение диапазона измеряемых угловых скоростей, сокращение времени готовности, увеличение межрегламентного периода.
3.3 Существенные признаки, характеризующие предлагаемое изобретение и общие с прототипом [6]: корпус, вал, двигатель, шарикоподшипники, упругий подвес, ротор и статор магнитоэлектрического датчика угла и момента, в рабочем зазоре которого создается переменное по окружности рабочего зазора магнитное поле. Существенные признаки, характеризующие предлагаемое изобретение и отличающиеся от прототипа: пазы на торцах двух кольцевых магнитов ротора ДУМ, наличие генераторных катушек на статоре ДУМ, полностью погруженных в магнитное поле двух кольцевых магнитов.
4 Краткое описание чертежей
На фиг. 1 представлена конструкция заявляемого устройства.
На фиг. 2 в изометрической проекции показаны кольцевые магниты с пазами, обеспечивающими модуляцию магнитного поля в рабочем зазоре ДУМ.
На фиг. 3 показаны катушки датчика момента и датчика угла в изометрической проекции (соединения проводников не показаны).
На фиг. 4 показаны катушки генератора сигнала в изометрической проекции (соединения проводников не показаны).
На фиг. 5 показана схема, поясняющая формирование сигнала ДУ.
На фиг. 6 показана схема, поясняющая формирование сигнала в генераторных катушках.
5 Осуществление изобретения
5.1 Как и в прототипе, предлагаемый динамически настраиваемый гироскоп содержит корпус 1 (фиг. 1), вал 2, подшипники 3 и 3′, упругий подвес 4, установленный на него ротор 5 из магнитномягкого сплава с высокой индукцией насыщения, кольцевой магнит из магнитнотвердого сплава с радиальной намагниченностью от центра к периферии 6, четыре катушки прямоугольной формы 7 (на фиг. 1 показана одна из них) двухкоординатного датчика момента, помещенные в рабочий зазор 8 между кольцевым магнитом и наружной частью ротора 5′, двигатель, состоящий из ротора 9 и статора 10.
В отличие от прототипа, в конструкцию введен еще один кольцевой магнит 6′, причем полярность его намагничивания противоположна магниту 6 (подобно описанному в аналоге [2]). В отличие от прототипа и аналога, на торцах магнитов, обращенных друг к другу, выполнены восемь одинаковых пазов 11 и 11′ (фиг. 2), причем пазы одного магнита находятся напротив пазов другого магнита, как соответственно и выступы 12 и 12′. Рабочие ветви прямоугольных катушек ДМ 7′ (фиг. 3), протекание тока в которых создает управляющий момент, расположены над сплошной частью магнитов, прямоугольные катушки ДУ 13 (12 одинаковых катушек на фиг. 3) расположены над выступами магнитов. Для эффективной работы ДУ, угловой размер Т катушек, как и в прототипе, рассчитывается по формуле:
где S — угол между центрами выступов на кольцевых магнитах, n — положительное число, но не ноль. В описываемой конструкции n=1 и T-S/2. Поверх слоя катушек ДМ и ДУ располагаются специальные генераторные катушки 14 прямоугольной формы (16 одинаковых катушек на фиг. 4). Катушки располагаются парами в два ряда, соединяются между собой последовательно, в каждой паре катушки включены встречно, т.е. имеют противоположное направление намотки. Оси двух рядов катушек расположены в плоскости над пазами в соответствующих кольцевых магнитах. Для эффективной работы, угловой размер прямоугольных генераторных катушек также равен S/2.
5.2 Работа гироскопа происходит следующим образом.
Вал 2 приводится во вращение двигателем, имеющим ротор 9 и статор 10, с частотой, соответствующей рабочей частоте вращения ƒp. При разворотах гироскопа в инерциальном пространстве относительно осей, не совпадающих с осью вращения вала, происходит угловое рассогласование ротора 5 относительно корпуса 1, что приводит к возникновению сигналов в катушках ДУ 13, амплитуда которых пропорциональна углам рассогласования, а частота равна k⋅ƒP, где k — количество пазов на каждом кольцевом магните. Формирование сигнала об отклонении ротора в предлагаемом устройстве аналогично прототипу [6] и применительно к магнитной системе, состоящей из двух кольцевых магнитов с пазами, происходит следующим образом.
При вращении ротора, в момент прохождения выступов 12 и 12′ (фиг. 5 -развертка цилиндрической поверхности на плоскость) под активными ветвями катушек 13 и 13′ (на фиг. 5 активные ветви катушек обозначены 13» и 13»’) в них индуцируется ЭДС, направление которой определяется правилом правой руки, а величина — длиной участка активной части, находящейся над магнитом. Для простоты на фиг. 5 показаны 2 катушки, расположенные диаметрально друг относительно друга и участвующие в формировании сигнала об отклонении ротора вокруг одной из осей чувствительности. Направление вектора индукции магнитного поля магнита 6 показана в сторону от наблюдателя значком , а магнита 6′ — условно на наблюдателя значком , направление движения магнита при вращении ротора относительно катушек показано стрелками . При отсутствии абсолютной угловой скорости корпуса ДНГ ротор находится в неотклоненном состоянии относительно катушек 13 и 13′, поэтому длины участков активной части катушек, находящихся над магнитом равны между собой, L1=L2=L3=L4=L. ЭДС, индуцируемая в этих участках, по абсолютной величине также равна, e1=е2=е3=е4=е (показана на фиг. 5 стрелками). Поскольку в каждой катушке ЭДС направлены встречно, в неотклоненном положении ротора суммарная ЭДС на выводных клеммах 16 и 17 равна нулю. При отклонении ротора от нулевого положения вследствие действия на прибор абсолютной угловой скорости, длины участков активной части катушек, находящихся над магнитом, изменяются на некоторую величину ΔL и становятся равными: L1=L+ΔL; L2=L-ΔL; L3=L-ΔL; L4=L+ΔL. Соответственно на величину Δe изменяется ЭДС, индуцируемая в этих участках: е1=е+Δе; е2=е-Δе; е3=е-Δе; е4=е+Δе. Поскольку ЭДС е1 и е2 направлены встречно, в результате в первой катушке образуется ЭДС амплитудой 2Δе. Аналогично во второй катушке индуцируется такая же ЭДС. Поскольку катушки соединены между собой перемычкой 15, на выводных клеммах ДУ 16 и 17 возникает напряжение амплитудой 4Δе.
В следующий момент времени, когда выступы становятся под правыми (на фиг. 5) активными ветвями катушек 13 и 13′, образование ЭДС в катушках повторяется с той разницей, что ее направление меняется на противоположное. Таким образом, на выводных клеммах ДУ возникает переменное напряжение амплитудой 4Δе и частотой k⋅ƒP, где k — число пазов на магнитах. После усиления и преобразования (преобразователь не показан) сигнал в виде тока подается в катушки датчика момента 7, образуя, тем самым, замкнутый контур компенсационной системы измерения. Протекание тока в рабочих ветвях 7′ катушек ДМ, расположенных в магнитном поле над сплошной частью кольцевых магнитов, создает момент соответствующего знака и величины, приводящий к нулю угол рассогласования между ротором и корпусом. Ток в катушках ДМ является мерой абсолютной угловой скорости, действующей на прибор. Поскольку рабочие ветви катушек ДМ расположены в магнитном поле над сплошной частью кольцевых магнитов, это, в отличие от прототипа, способствует увеличению диапазона угловых скоростей, измеряемых данным прибором.
Вращение ротора с угловой скоростью 2πƒР индуцирует в генераторных катушках 14, 14′ ЭДС, амплитуда которой прямо пропорциональна магнитной индукции в рабочем зазоре датчика момента. Происходит это следующим образом. В момент времени, когда активные ветви 14» и 14»’ (фиг. 6) генераторных катушек находятся над выступами кольцевых магнитов 12 и 12′, в них индуцируется ЭДС
где е5, е6 — ЭДС, индуцируемые в активных ветвях генераторных катушек в момент прохождения под ними выступов на кольцевых магнитах;
В — индукция магнитного поля над выступами кольцевого магнита;
S — длина проводника;
ν — скорость движения проводника относительно магнитного поля;
m — число витков в каждой катушке;
h — длина активной части ветви генераторной катушки, находящейся в зоне переменного магнитного поля над пазами в магнитах, и равная глубине этих пазов;
R — радиус, на котором располагаются генераторные катушки.
Поскольку катушки 14 и 14′ соединены перемычкой 18 последовательно встречно, ЭДС на выводных клеммах 19 и 20 удвоится и будет равна 2е5. В следующий момент времени, когда выступы будут находиться под правыми (на фиг. 6) активными ветвями катушек 14 и 14′, на выводных клеммах 19 и 20 будет индуцирована ЭДС противоположного знака. Таким образом, на выводных клеммах одной пары генераторных катушек будет индуцировано переменное напряжение с частотой k⋅ƒP и амплитудой 2е5. При последовательном соединении пар генераторных катушек амплитуда напряжения возрастет в соответствующее число раз и может достичь U=1В и более. Как видно из фиг. 6 и формулы (2), амплитуда этого напряжения инвариантна к перемещениям катушек относительно ротора, т.к. при малых перемещениях длина активной части ветви генераторной катушки, находящейся в переменном магнитном поле, не изменится и будет всегда равна h — глубине пазов в магнитах. Поэтому амплитуда напряжения на выводных клеммах генераторных катушек гироскопа определяется только индукцией В магнитного поля в рабочем зазоре датчика момента (изменением глубины пазов h вследствие теплового расширения магнита можно пренебречь, т.к в относительных единицах оно на два порядка меньше, чем соответствующее изменение индукции).
Электронное устройство (не приводится на чертежах) измерителя абсолютной угловой скорости (ИУС) измеряет ток в катушках ДМ и напряжение на выводных клеммах генераторных катушек, формирует информацию об абсолютной угловой скорости по формуле:
где N — выходная информация ИУС;
k0 — масштабирующий коэффициент электронного блока ИУС по току в катушках ДМ, определяемый и паспортизуемый при калибровке;
IДМ — ток, протекающий в катушках ДМ при воздействии абсолютной угловой скорости в текущий момент времени;
U — напряжение на выводных клеммах генераторных катушек в текущий момент времени;
U0 — напряжение на выводных клеммах генераторных катушек, измеренное и паспортизованное при калибровке ИУС.
5.3 Покажем, что использование напряжения, индуцированного в генераторных катушках, делает ИУС на базе предлагаемого ДНГ инвариантным к изменению коэффициента передачи ДМ, обусловленного изменением температуры окружающей среды и старением магнитов.
Формируемый компенсационной системой измерения ток IДМ прямо пропорционален абсолютной угловой скорости основания, на котором установлен ДНГ, и зависит от коэффициента передачи ДМ:
где Н — кинетический момент ДНГ;
kДМ — коэффициента передачи ДМ;
ωα — измеряемая абсолютная угловая скорость.
Изменение температуры окружающей среды и старение магнитов приведет к изменению индукции в рабочем зазоре ДМ и изменению коэффициента передачи ДМ:
где kДМ0 — коэффициент передачи ДМ при калибровке ИУС на этапе его изготовления;
В0 — индукция в рабочем зазоре ДМ при калибровке ИУС;
ΔВ — изменение индукции в рабочем зазоре ДМ при эксплуатации ИУС вследствие изменения температуры окружающей среды и старения магнитов.
В соответствии с формулой (2), напряжение на выводных клеммах генераторных катушек прямо пропорционально индукции в рабочем зазоре ДМ, поэтому, при изменении индукции оно, по сравнению с измеренным при калибровке ИУС, будет:
Подставляя (5) в (4), (4) и (6) в (3) получаем:
Формула (7) показывает, что использование напряжения на выводных клеммах генераторных катушек при вычислении абсолютной угловой скорости ИУС на базе предлагаемого ДНГ исключает ошибку, обусловленную изменением коэффициента передачи ДМ вследствие изменения температуры окружающей среды и старения магнитов.
Таким образом, введение в конструкцию датчика угла и момента ДНГ двух кольцевых магнитов радиальной намагниченности с пазами на торцах, специальных генераторных катушек и расположение рабочих ветвей ДМ над сплошной частью кольцевых магнитов увеличивает диапазон измеряемых угловых скоростей, повышает точность измерения абсолютной угловой скорости в условиях меняющейся температуры окружающей среды, увеличивает срок между регламентными проверками измерителя абсолютной угловой скорости на базе предлагаемого ДНГ.
Динамически настраиваемый гироскоп, содержащий корпус, приводной вал, расположенный в корпусе на шарикоподшипниках, ротор, вращающийся вокруг оси вращения вала, упругий подвес, передающий вращение от вала к ротору и обеспечивающий ему две угловые степени свободы относительно вала, два кольцевых постоянных магнита, установленные на роторе и намагниченные в радиальном направлении, катушки прямоугольной формы, образующие статор двухкоординатного датчика угла и момента, двигатель, состоящий из ротора и статора, отличающийся тем, что на торцах магнитов, обращенных друг к другу, выполнены пазы, стороны катушек датчика момента, протекание тока в которых создает управляющий момент, расположены над сплошными частями магнитов, стороны катушек датчика угла, в которых формируется сигнал об угловых отклонениях ротора, расположены над пазами в магнитах, в рабочий зазор магнитной системы помещены генераторные катушки прямоугольной формы, соединенные последовательно и расположенные парами в два ряда над кольцевыми магнитами так, что они не выходят за пределы магнитной системы ротора датчика угла и момента, а оси каждого ряда находятся над пазами в соответствующем магните.
Метод компенсации температуры на основе алгоритмаFusion для акселерометра МЭМС с высоким ускорением
В последние годы акселерометры МЭМС с высоким ускорением широко используются в авиации, медицине и других областях. Поэтому чрезвычайно важно повысить точность и производительность акселерометров High-G MEMS. Для этой цели мы предлагаем алгоритм объединения, который объединяет EMD, пороговую обработку вейвлетов и температурную компенсацию для обработки данных измерений с акселерометра High-G MEMS. В алгоритме объединения исходный сигнал акселерометра сначала разлагается с помощью EMD для получения функции внутреннего режима (IMF).Затем энтропия выборки (SE) используется для разделения компонентов IMF на три сегмента. Сегмент шума напрямую опускается, вейвлет-пороговая обработка выполняется в сегменте микширования, а GA-BP выполняет температурную компенсацию в сегменте дрейфа. Наконец, осуществляется реконструкция сигнала. Позже проводится сравнительный анализ результатов четырех моделей: EMD, вейвлет-пороговая обработка, EMD + вейвлет-пороговая обработка и EMD + вейвлет-пороговая обработка + температурная компенсация. Экспериментальные данные показывают, что ускорение случайного блуждания изменилось с 1712 г.66 г / ч / Гц 0,5 до 79,15 г / ч / Гц 0,5 , а стабильность нулевого отклонения изменяется с 49275 г / ч до 774,7 г / ч. Это указывает на то, что алгоритм объединения (EMD + пороговая обработка вейвлетов + температурная компенсация) не только эффективно подавляет шум высокочастотных компонентов, но также компенсирует температурный дрейф в акселерометре.
1. Введение
Акселерометры MEMS изготавливаются с использованием технологии MEMS [1]. Акселерометр High-G MEMS — это общий термин, обозначающий акселерометры большого диапазона.Это ключевой компонент инерционного тестирования и контроля технологии MEMS на предмет несанкционированного доступа. Основное применение акселерометра High-G MEMS — измерение и контроль изменений скорости в высокоскоростных носителях движения во время запуска и работы [2, 3]. Таким образом, акселерометр High-G MEMS широко используется в аэрокосмической сфере для точного управления ракетами и интеллектуальными снарядами [4]. Поэтому исследования этого типа датчика и связанной с ним системы MEMS чрезвычайно важны.Многие акселерометры High-G MEMS являются наиболее чувствительным компонентом системы ввода и критически влияют на точность системы. Воздействие самого акселерометра и аппаратной схемы сбора сигналов приводит к наложению полученного сигнала акселерометра и большого количества шумовых сигналов. Прямой анализ выходного сигнала неизбежно приводит к ошибке, требующей соответствующей обработки шумоподавления [5]. Традиционный фильтр преобразования Фурье работает на разнице между частотными распределениями сигнала и шума.Таким образом, нежелательная частотная составляющая может быть удалена путем выбора подходящего фильтра в частотной области для снижения шума [6]. Однако предварительным условием для обработки с использованием преобразований Фурье является то, что сигнал удовлетворяет стационарному предположению. Часто бывает трудно удалить шум нестационарных или переходных сигналов с использованием методов фильтрации в частотной области, потому что преобразование Фурье не применимо к нестационарным сигналам, которые встречаются на практике [7]. В эмпирической модовой декомпозиции сами данные используются для адаптивной декомпозиции нестационарных сигналов, так что могут обрабатываться произвольные нелинейные и нестационарные сигналы [8].В этом методе сложный сигнал раскладывается на несколько функций собственных мод, упорядоченных по частоте. Кроме того, разложенные компоненты можно использовать для восстановления исходного сигнала без потери энергии [9]. Вейвлет-преобразование — это локализованный анализ во временной (пространственной) частоте. Его можно автоматически адаптировать к требованиям частотно-временного анализа сигналов. Вейвлет-пороговая обработка, основанная на вейвлет-преобразовании, стала наиболее часто используемым методом шумоподавления [10]. Традиционные методы шумоподавления стремятся удалить все высокочастотные компоненты сигнала, содержащие шум, тем самым также устраняя желательные компоненты сигнала в высокочастотном диапазоне.Пороговая обработка вейвлетов может решить эту проблему [11]. Следовательно, сочетание EMD с пороговой обработкой вейвлетов является эффективным методом подавления шума. Однако основным материалом, который используется для ускорения MEMS, является кремний, на который сильно влияет температура. Таким образом, изменения температуры окружающей среды приводят к ошибкам измерения акселерометра. Поэтому очень важно изучить температурные характеристики акселерометров и компенсировать температурный дрейф. В настоящее время для температурной компенсации широко используются аппаратные и программные методы.Аппаратная компенсация обычно повышает точность акселерометра за счет изменения материала, процесса, структуры и рабочей среды акселерометра. Однако процесс аппаратной компенсации сложен. В программной компенсации разработана модель температурной компенсации акселерометра. Для разработки этой температурной модели обычно необходимо разработать специальный блок контроля температуры или сложное испытательное оборудование, такое как независимый блок высокоточного контроля температуры, индексный стол или поворотный столик контроля температуры.Модель компенсации температурной погрешности, разработанная путем численного анализа данных испытаний для акселерометров MEMS, является экономичной и практичной. Это часть текущего направления исследований. Температурная компенсация может улучшить точность акселерометра и его выходной сигнал [12, 13]. Для этой цели мы разрабатываем алгоритм объединения, который сочетает EMD с пороговой обработкой вейвлетов и температурной компенсацией. Этот алгоритм используется для обработки данных измерений акселерометра MEMS. В алгоритме слияния сначала выполняется разложение EMD на исходном сигнале акселерометра для получения компонентов IMF, которые затем сегментируются с использованием выборочной энтропии (SE).Сегмент шума напрямую округляется, а сегмент микширования обрабатывается пороговым значением вейвлета. И сегмент дрейфа обрабатывается алгоритмом нейронной сети генетического вейвлета (GA-BP) для температурной компенсации. Восстановленный сигнал демонстрирует повышенную точность. Экспериментальные данные показывают, что после использования алгоритма слияния, случайное блуждание ускорения и стабильность нулевого отклонения изменяются с 1712,66 г / ч / Гц 0,5 и 49275 г / ч до 79,15 г / ч / Гц 0,5 и 774.7 г / ч соответственно. Это указывает на то, что алгоритм объединения не только эффективно подавляет шум высокочастотных компонентов, но также компенсирует температурный дрейф в акселерометре.
В этой статье мы представляем структуру и принцип работы акселерометра МЭМС High-G и разрабатываем алгоритм объединения. Статья разделена на пять разделов. Алгоритм описан в разделе 2; введение в акселерометры представлено в Разделе 3; температурный эксперимент описан в разделе 4 вместе с анализом экспериментальных результатов; и последний раздел служит заключением.
2. Алгоритм
2.1. Разложение по эмпирическим модам (EMD)
Разложение по эмпирическим модам (EMD) — это алгоритм адаптивного разложения сигналов, предложенный Cao et al. для нелинейных и нестационарных сигналов [14]. Сигнал после разложения EMD будет генерировать компоненты IMF с разными временными масштабами. Компоненты IMF могут интуитивно и верно отражать характеристики сигнала, независимо от того, является ли сам сигнал линейным или нелинейным. Следовательно, метод EMD имеет лучший эффект обработки и большие преимущества при шумоподавлении нестационарных и нелинейных сигналов.Базисная функция разложения EMD непосредственно генерируется самим сигналом. Декомпозиция данных имеет реальное физическое значение. Он также имеет высокое частотно-временное разрешение. Для исходного сигнала X ( t ) процесс разложения по эмпирическим модам для генерации каждого компонента IMF выглядит следующим образом [15]: (1) Сначала определяются все локальные точки максимума и минимума определенного сигнала. Затем все полученные точки локального максимума соединяются с помощью кубической сплайновой кривой, чтобы соответствовать максимальной огибающей.Все результирующие точки локального минимума соответствуют минимальной огибающей. В этот момент все данные сигнала содержатся между максимальной и минимальной огибающей. (2) После подгонки верхней и нижней огибающей линии получается среднее из двух значений. Может быть известно, что (3) Затем вычтите m 1 ( t ) из исходного сигнала X ( t ), чтобы получить остаточную составляющую h 1 ( t ) с удаленной низкочастотной составляющей, а именно: Определите, удовлетворяет ли оставшаяся составляющая h 1 ( t ) условиям, определенным внутренней модальной функцией.Если это так, оставшийся компонент h 1 ( t ) сохраняется как компонент IMF. (4) Если h 1 ( t ) не удовлетворяет условиям, определенным IMF, возьмите h 1 ( t ) в качестве исходных данных и повторите шаги (2) ∼ (3) следующим образом:
Если h i +1 ( t ) удовлетворяет условию, что естественная модальная функция истинна, тогда (5) r 1 ( t ) получается вычитанием первого компонента IMF a 1 ( t ) из исходного сигнала X ( t ): r 1 ( t ) снова принимается в качестве исходного сигнала, а затем повторяются вышеуказанные шаги для получения a 2 ( t ) компонента IMF второго X ( t ), который повторяется n раз до n -го Компонент IMF a n ( t ) получается, или когда остаточный компонент r n ( t ) является постоянной или монотонной функцией, процесс разложения EMD завершается .(6) Наконец, составляющая IMF порядка n и остаточная составляющая r n ( t ) могут быть приспособлены для формирования исходного сигнала X ( t ) следующим образом:
2.2. Удаление шумов вейвлет-порога
Вейвлет-преобразование — это локальное преобразование во временной и частотной областях. Вейвлет-преобразование может преодолевать ограничения традиционного преобразования Фурье с помощью функций масштабирования и сдвига или многомасштабного уточняющего анализа сигналов [16].Следовательно, вейвлет-преобразование стало широко используемым методом уменьшения шума сигнала. Существует три обычно используемых метода уменьшения шума вейвлет-преобразования: максимальное уменьшение шума вейвлет-модуля, уменьшение шума корреляции вейвлет-коэффициентов и уменьшение порогового шума вейвлет-преобразования. Среди этих методов пороговая обработка вейвлетов широко используется для уменьшения шума из-за простоты реализации. В общем, шумоподавление вейвлет-порога сигнала может быть достигнуто за следующие три этапа [17]: (1) Выполняется вейвлет-разложение сигнала.Выбрана базовая функция вейвлета. Определяется количество слоев, подлежащих разложению. (2) Порог выбирается для количественной оценки высокочастотных вейвлет-коэффициентов, полученных с использованием методов жесткого или мягкого порога. (3) Выполняется вейвлет-реконструкция. Сигнал восстанавливается с использованием низкочастотных коэффициентов самого нижнего слоя после вейвлет-разложения и высокочастотных коэффициентов всех слоев после вейвлет-разложения.
Методы обработки пороговых значений включают методы жесткого и мягкого порога.В методе жесткого порога вейвлет-коэффициенты выше заданного порога не изменяются. Вейвлет-коэффициенты ниже этого порога каждого подпространства устанавливаются равными нулю. В методе мягкого порога вейвлет-коэффициенты сокращаются до нуля в соответствии с фиксированной величиной, а шумоподавленный сигнал восстанавливается с использованием новых вейвлет-коэффициентов.
Модель жесткого порога выглядит следующим образом: где S j ( i ) представляет i -й коэффициент компонента вейвлет-разложения в j -м слое; представляет i -й коэффициент компонента вейвлет-разложения в j -м слое после шумоподавления.- оценочное пороговое значение j -го слоя, полученное по критерию определения порога.
Критерий определения порога включает фиксированную несмещенную оценку штейна (iRgrsure), адаптивную несмещенную оценку штейна (Heusrure), минимаксный критерий (Minimaxi) и критерий фиксированного порога (Sqtwolog).
2.3. SE (выборочная энтропия)
Выборочная энтропия (SE) — это метод измерения сложности временного ряда, улучшенный по сравнению с методом приблизительной энтропии (AE) [18].SE увеличивает точность приблизительной энтропии. Он предлагает два основных преимущества по сравнению с приблизительной энтропией. Во-первых, сегменты данных не сравниваются в SE, что снижает зависимость от длины временного ряда. Это уменьшает ошибку в приблизительной энтропии и делает метод нечувствительным к потерянным данным. Во-вторых, SE более последовательна, чем AE. То есть изменение параметров k и h одинаково влияет на ЧЭ. Чем ниже значение SE, тем выше самоподобие последовательности.Чем больше значение SE, тем сложнее последовательность выборки. В настоящее время SE находит применение для оценки сложности физиологических временных рядов (ЭЭГ, пЭМГ и т. Д.) И диагностики патологических состояний [19].
В общем случае исходная последовательность сигнала x (1), x (2),…, x ( T ) состоит из данных T , а алгоритм SE выглядит следующим образом 🙁 1) Последовательность векторов размерности k , где. Эти векторы представляют k последовательных значений x от точки м .(2) Расстояние между вектором X k ( m ) и X k ( n ) определяется как абсолютное значение наибольшей разницы между двумя соответствующими элементами. , то есть (3) Для данного X k ( м ), число n , расстояние между которыми между X k ( м ) и X k ( n ) меньше или равно h считается и обозначается как B m .Для определяем (4) B k ( h ) определяется как (5) Размер увеличивается до. Вычисляется количество расстояний между и меньше ч и обозначается как C м . определяется следующим образом: (6) C k ( h ) определяется следующим образом:
Таким образом, B k ( h ) — вероятность совпадения двух последовательностей k балла за допуск подобия h . C k ( h ) — вероятность совпадения двух последовательностей точек. SE определяется как
Когда N принимает конечное значение, для оценки SE можно использовать следующее уравнение:
Значение SE зависит от значений k и h , что делает эти значения очень значимые параметры расчета. Согласно результатам исследований, представленных в литературе [20], SE рассчитывается с использованием k = 1 или 2 и h = 0.1 ~ 0,25 стандартного отклонения (стандартное отклонение исходных данных) демонстрирует относительно разумные статистические характеристики. В этом исследовании мы берем k = 1 и h = 0,1 std.
2.4. Создание модели температурной компенсации нейронной сети GA-BP
2.4.1. Модель компенсации температуры BP
Нейронная сеть с обратным распространением (BP) обучается в соответствии с алгоритмом обратного распространения ошибок. Эта многослойная нейронная сеть с прямой связью является наиболее широко используемой нейронной сетью [21].Процесс обучения нейронной сети BP состоит из двух этапов: прямое распространение сигнала и обратное распространение ошибки. Эти две стадии происходят циклически, во время которых вес слоев постоянно регулируется. Процесс обучения не заканчивается до тех пор, пока ошибка на выходе сети не станет приемлемой или не перейдет к заранее заданному количеству петель. Алгоритму нейронной сети не нужно знать конкретную взаимосвязь между входным вектором. Выходные данные должны определять только фактор вектора входных данных для получения целевых выходных данных посредством обучения и обучения сети.Следовательно, масштабный коэффициент и модель температурной компенсации с нулевым смещением могут использоваться с трехуровневой структурой сети. То есть температура и соседний температурный перепад берутся в качестве входных переменных, количество скрытых слоев — один, а масштабный коэффициент и значение напряжения нулевого смещения служат выходными сигналами сети. Топология топологии сетевой структуры показана на рисунке 1.
Соответствующие отношения преобразования каждого уровня следующие.
Входной слой в скрытый слой:
Скрытый слой в выходной слой:
Сетевая ошибка F : где x i — температура и разница температур входной переменной; a ij и b jk — веса соединений каждого слоя; B k — сетевое выходное значение масштабного коэффициента и смещения нуля; d — ожидаемое значение масштабного коэффициента и смещения нуля.Передаточные функции f ( x ) представляют собой сигмовидную функцию и линейную передаточную функцию purelin, соответственно. Функция обучения увеличивает скорость сходимости сети для алгоритма Левенберга – Марквардта, тем самым устанавливая масштабный коэффициент и сетевую модель BP с нулевым смещением.
2.4.2. Модель компенсации температуры GA-BP
Ввиду того факта, что генетический алгоритм (GA) является вероятностным адаптивным итеративным процессом оптимизации, он имеет хорошую производительность глобального поиска и его нелегко упасть до локального минимума.Даже если заданная функция приспособленности является прерывистой и нерегулярной, она может найти общее оптимальное решение с наибольшей вероятностью. Подходит для параллельной обработки. Поиск не полагается на характеристики градиентной информации. Таким образом, GA можно использовать для оптимизации начального веса и порога нейронной сети BP и поиска в большом диапазоне вместо случайного выбора общих начальных весов. Затем алгоритм BP используется для точной настройки сети в пространстве решений для поиска оптимального решения или приближенного оптимального решения.Это не только обеспечивает взаимодополняющие преимущества этих двух, но также проявляет широкие возможности нелинейного картирования нейронной сети и способность глобального поиска генетического алгоритма. Это ускоряет скорость обучения сети и улучшает способность аппроксимации и обобщения во всем учебном проекте [22]. (1) Определение номера выборки температуры входного фактора, разницы температур и масштабного коэффициента выходного коэффициента / нулевого отклонения, а также установка функция пригодности, случайным образом сгенерируйте значение веса и пороговое значение, чтобы сгенерировать начальную совокупность и код.(2) Сетевой выход соответствующей хромосомы получается посредством сетевого вычисления масштабного коэффициента и входной выборки с нулевым отклонением. (3) Расчет приспособленности хромосомы с использованием функции приспособленности. (4) Регенерация, скрещивание и мутация для создания нового поколения населения. (5) Достигнуто условие завершения, и получены глобальный оптимальный вес сети и порог; в противном случае возвращается шаг (3), указанный выше.
Модель акселерометра High-G MEMS с температурной компенсацией GA-BP была завершена описанным выше методом.
Расчетная блок-схема оптимизации нейронной сети BP с помощью GA показана на рисунке 2:
В этом исследовании, в соответствии с эмпирической формулой, количество узлов скрытого слоя может быть определено равным 5, где м — количество узлов скрытого слоя, а n — количество входных переменных. Скорость обучения будет влиять на время обучения и колебания сети, поэтому скорость обучения Lr равна 0,6, а точность сети равна 0 0001, что завершает настройку параметра структуры нейронной сети BP.
Размер популяции определяет сложность хромосомы. Для адаптации к эволюционным способностям хромосом размер группы установлен на 30; кодирование хромосомы в двоичной форме. Длина кодирования хромосомы 15 выбрана для повышения эффективности оптимизации. Преимущества и недостатки оператора ограничивают область поиска допустимой области. Смоделирован закон выживания наиболее приспособленных в природе. Для отбора потомства используется метод рулетки. Чтобы действительно отразить влияние природы на популяции, оператор кроссовера использует 0.7. Для обеспечения разнообразия популяции во избежание искажения популяции, которое может повлиять на механизм поиска, оператор кроссовера установлен на 0,01. Таким образом, все параметры задаются для всей сетевой модели GA-BP.
2,5. EMD, вейвлет-порог и алгоритм объединения температурной компенсации
Когда сигнал имеет очень маленькую полезную амплитуду и в значительной степени аннигилирован шумом, использование вейвлет-анализа для шумоподавления не идеально. Алгоритм временной и пространственной фильтрации, используемый в EMD, просто удаляет один или несколько компонентов IMF.Это приводит к удалению соответствующих полезных сигналов. Следовательно, EMD — это очень приблизительный метод шумоподавления, который может привести к значительному искажению сигнала. Здесь мы комбинируем EMD с пороговым значением вейвлета, чтобы компенсировать соответствующие недостатки каждого метода. Кроме того, поскольку на акселерометр MEMS сильно влияет температура, мы включаем температурную компенсацию в метод шумоподавления. В этой статье мы объединяем EMD, вейвлет-пороговую обработку и температурную компенсацию в одном методе.Алгоритм для этого метода представлен следующим образом: (1) Исходный сигнал разлагается с помощью EMD для получения модальных компонентов (2) Алгоритм SE используется для разделения компонентов IMF на три сегмента: сегмент шума, сегмент микширования, и сегмент дрейфа (3) Сегмент шума непосредственно округляется, сегмент смешивания обрабатывается с использованием пороговой обработки вейвлетов, а температурная компенсация выполняется в сегменте дрейфа
. Два сегмента выполняют реконструкцию сигнала для получения окончательного сигнала.Последовательность алгоритма объединения показана на рисунке 3.
3. Структура и структурные параметры акселерометра МЭМС High-G
Исходный сигнал, собранный в этой статье, исходит от недавно разработанного и произведенного акселерометра МЭМС High-G. [23]. Его структура представляет собой четырехлучевые островки. Балка и масса имеют прямоугольную форму и просты в изготовлении. Балочно-массовая конструкция поддерживается рамой и соединяется с днищем [24, 25]. Его структурная схема и размер показаны на рисунке 4.
Параметры длины и ширины балки были оптимизированы с использованием метода моделирования MATLAB. Программное обеспечение используется для анализа взаимосвязи между прогибом, нагрузкой, механической чувствительностью и резонансной частотой в зависимости от длины и ширины акселерометра. И рисунок 5 нарисован. После всестороннего рассмотрения различных факторов, структурные параметры были изменены и оптимизированы, как показано в Таблице 1:
| |||||||||||||||||||||||||||||||||||
Режим первого порядка моделируется и анализируется программным обеспечением ANSYS, как показано на рисунке 6.Масса первой моды перемещается по оси Z , а ее резонансная частота составляет 408 кГц, что является рабочим режимом.
Конструкция акселерометра МЭМС High-G сделана из кремния и приклеена к стеклу, а фотографии структуры акселерометра, полученные с помощью SEM и CCD, показаны на рисунке 7.
4. Анализ экспериментов и результатов
4.1. Температурный эксперимент
Оборудование, которое используется в температурном эксперименте, состоит из печи с регулируемой температурой.Блок питания GWINSTEK GPS-4303C обеспечивает напряжением +5 В на акселерометр High-G MEMS, который помещается в печь. Метод термического сопротивления используется для получения в реальном времени температуры в корпусе акселерометра, и это значение синхронизируется с выходным сигналом акселерометра High-G MEMS. Устройство показано на рисунке 8. Температуру печи можно точно регулировать в диапазоне от –50 ° C до + 150 ° C. В этом диапазоне проводятся температурные эксперименты и высокоскоростные системы сбора данных.Компьютеры используются для сбора выходных сигналов акселерометра High-G MEMS. Во-первых, диапазон температур духовки устанавливается от –10 ° C до 60 ° C. Затем непрерывно собираются данные о температуре печи и выходном значении акселерометра. Кривые для этих двух наборов данных показаны на рисунке 8.
4.2. Анализ результатов
Из рисунка 9 видно, что выходной сигнал акселерометра значительно изменяется в зависимости от температуры. Во-первых, мы используем три модели снижения шума, чтобы компенсировать выходной сигнал акселерометра в температурном эксперименте: EMD, пороговая обработка вейвлетов и EMD + пороговая обработка вейвлетов.Диаграмма разложения EMD показана на рисунке 10. Хорошо известно, что эти сигналы характеризуются высокочастотным шумом и низкочастотным дрейфом. Следовательно, после завершения разложения EMD алгоритм SE используется для вычисления значений SE разложенных 15 компонентов IMF. Затем 15 компонентов IMF сегментируются по значениям SE. 15 компонентов IMF разбиты на три сегмента [26]. В этой статье, основываясь на характеристиках 15 компонентов IMF, мы анализируем, что последовательность сигналов с SE больше 1 очень сложна.Он содержит много шума и относится к шумовому сегменту. От 0,2 до 1 — это смешанный сегмент шума и сигнала, а меньше 0,2 — сегмент без шума.
Первый сегмент содержит первую и вторую компоненты IMF и является сегментом шума C1; второй сегмент содержит третью и четвертую компоненты IMF и является сегментом микширования C2; а третий сегмент содержит компоненты IMF с пятого по пятнадцатый и представляет собой дрейфовый сегмент C3, как показано на рисунке 11.
Из рисунка 11 видно, что сегмент шума очень грубый, но тенденция устойчивая. Это указывает на то, что этот сегмент содержит только большое количество шума и нет явления дрейфа независимо от температуры. Шум сегмента микширования значительно меньше, чем сегмент шума, но все же содержит шум. Его тренд плавный и нет дрейфа. Сегмент дрифта больше не грубый. Мы думаем, что на него влияет только температура, вызывая дрейф и отсутствие шума.
После того, как SE расслоит сигнал, разрабатываются модели снижения шума. При подавлении шума EMD функции первого и второго собственных режимов напрямую отбрасываются, потому что они представляют собой сегменты шума и являются случайными и независимыми от температуры. Остальные компоненты используются для восстановления сигнала. При шумоподавлении порога вейвлета вейвлет «db5» выбирается в качестве функции генерации вейвлета. Масштаб разложения установлен на 5. Кроме того, шумоподавление вейвлет-порога выполняется для всего сигнала.В методе определения порога вейвлета EMD + сегмент шума отбрасывается, сегмент микширования подвергается обработке порогового значения вейвлета, а сегмент дрейфа остается неизменным. Наконец, сигнал реконструируется. Результаты трех моделей снижения шума показаны на рисунке 12.
Рассчитываются результаты для каждой модели. Они показывают, что все три модели хорошо аппроксимируют исходные данные. Из трех моделей EMD и порог вейвлета почти одинаково влияют на подавление шума.Наилучшее подавление шума демонстрирует пороговая обработка вейвлетов EMD +. Затем, используя результаты снижения шума методом EMD + вейвлет-порог, выполняется температурная компенсация GA-BP для дрейфового сегмента сигнала. Итак, разработана модель температурной компенсации EMD + вейвлет-порог + (GA-BP). Наконец, C2 и C3 реконструируются для получения окончательного сигнала, как показано на Рисунке 13.
Дисперсия Аллана [27, 28] используется для оценки эффекта снижения шума и температурной компенсации четырех методов (Рисунок 14). .
Результаты для случайного блуждания с ускорением (который представляет шумовые характеристики) и устойчивости при нулевом смещении показаны в таблице 2. Данные показывают, что значения для случайного блуждания ускорения, полученные с использованием EMD, пороговой обработки вейвлетов, и методы определения порога вейвлетов EMD + составляют 338,184 г / ч / Гц 0,5 , 338,02 г / ч / Гц 0,5 и 207,518 г / ч / Гц 0,5 соответственно. Соответствующие значения устойчивости к нулевому отклонению равны 49275.9 г / ч, 49274,7 г / ч и 49275,5 г / ч соответственно. При добавлении температурной компенсации значения для случайного блуждания ускорения и стабильности при нулевом смещении составляют 79,15 г / ч / Гц, 0,5 и 774,7 г / ч, соответственно. Это указывает на то, что шум акселерометра был в достаточной степени подавлен, а температурный дрейф хорошо компенсирован. Основное содержание этой статьи — предложить новый метод обработки сигналов, который представляет собой программный метод обработки. Ограничение этого метода заключается в том, что он не может быть обработан в реальном времени и должен быть полностью собран перед обработкой.Скорость обработки зависит от того, насколько быстро работает компьютерное программное обеспечение. Чем быстрее работает компьютер, тем быстрее будут обработаны результаты. Наша цель — предоставить более эффективный метод обработки сигналов для тех же или похожих ученых. В будущем мы продолжим усиливать исследования в этой области и стремимся разрабатывать более эффективные и действенные методы.
| ||||||||||||||||||||||||||||||||||||||
5.Заключение
В этой статье изучается алгоритм объединения EMD + вейвлет-пороговая обработка + (GA-BP) температурной компенсации для повышения точности недавно разработанного акселерометра High-G. Алгоритм объединения сначала выполняет разложение EMD на исходном сигнале акселерометра, чтобы получить компоненты IMF. Затем компоненты МВФ сегментируются по SE. Сегмент шума напрямую опускается, вейвлет-пороговая обработка выполняется в сегменте микширования, а GA-BP выполняет температурную компенсацию в сегменте дрейфа.Наконец, осуществляется реконструкция сигнала. В четвертой части этой статьи результаты EMD, вейвлет-порога, EMD + вейвлет-порога и EMD + вейвлет-порога + температурной компенсации сравниваются с помощью вычисления дисперсии Аллана. И алгоритм слияния оказался лучшим. Как показывают данные, случайное ускорение и стабильность при нулевом отклонении изменяются с 1712,66 г / ч / Гц 0,5 и 49275 г / ч до 79,15 г / ч / Гц 0,5, и 774,7 г / ч, соответственно. Это указывает на то, что алгоритм объединения не только эффективно подавляет шум, но и компенсирует температурный дрейф акселерометра.
Доступность данных
Данные, использованные для подтверждения выводов этого исследования, можно получить у соответствующего автора по запросу.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов.
Выражение признательности
Эта работа была поддержана Национальным фондом естественных наук Китая (№№ 51705477, 61703098 и 61603353) и Полевым фондом предварительных исследований Департамента разработки оборудования Китая (№61405170104). Это исследование также было поддержано ведущими молодыми академическими лидерами высших учебных заведений провинции Шаньси, программой фонда для научной деятельности отобранных вернувшихся за границу специалистов в провинции Шаньси, Научным фондом молодежи провинции Шаньси (№ 201801D221195), молодыми академическими лидерами Северного университета. Китая (№ QX201809), Открытый фонд Государственной ключевой лаборатории глубокого заглубленного поражения цели (№ DXMBJJ2017-15) и Фонд строительства ключевых объектов Шаньси «Проект 1331».
(PDF) Метод температурной компенсации на основе алгоритма синтеза для МЭМС-акселерометра с высоким ускорением
Исследованиетакже было поддержано ведущими молодыми академическими
Лидерами высших учебных заведений провинции Шаньси, Фонд
Программадля научной деятельности выбранных возвращенных
Иностранные специалисты в провинции Шаньси, провинция Шаньси
Научный фонд молодежи (No. 201801D221195),
Молодые академические лидеры Северного университета Китая (No.
QX201809), Открытый фонд Государственной ключевой лаборатории глубокого
подземных повреждений (№ DXMBJJ2017-15) и Фонд строительства
Шаньси «Проект 1331» по ключевым объектам.
Ссылки
[1] Й. Лю и Т. Ма, «Высокоточный емкостной МЭМС-акселерометр, основанный на паразитном сопротивлении
,, фазовый сдвиг и его использование для температурной компенсации
», IEEE Sensors Journal, vol. 18,
нет. 2, pp. 629–634, 2018.
[2] Q.Лу, Л. Панг, Х. Хуанг и др., «Метод калибровки шумоподавления
с высоким коэффициентом ускорения для акселерометра MEMS с высоким ускорением на основе EMD и порога вейвлета
», Micromachines, vol. 10, вып. 2, стр. 134, 2019.
[3] К. Шен, Дж. Ян, Дж. Танг, Дж. Лю и Х. Цао, «Алгоритм сброса температурных и шумовых ошибок параллельной обработки
для микро-
электро- гироскоп механической системы на основе вариационного разложения мод
и дополненного нелинейного преобразователя
, Обзор научных инструментов, т.89, нет. 7, статья
076107, 2018.
[4] З. Ван, В. Ду, Дж. Ван и др., «Исследование и применение
улучшенного адаптивного метода диагностики неисправностей MOMEDA»,
Measurement, vol. 140, pp. 63–75, 2019.
[5] Х. Цао, Х. Ли, Дж. Лю, Ю. Ши, Дж. Тан и К. Шен, «Испытанный интерфейс im-
и шум анализ конструкции микрогироскопа вилки
// Механические системы и сигналы
Обработка, т. 70-71, с. 1209–1220, 2016.
[6] В. Ван и Л. Лю, «Преобразование Фурье и оценки»,
Journal of Mathematical Analysis & Applications, vol. 470,
нет. 2, pp. 1167–1184, 2019.
[7] Р. Ли, Дж. Ван и Ю. Чен, «Влияние фильтрации сигнала на анализ колебаний без тренда
», Physica A: Statistical Me —
Chanics и ее приложения, т. 494, pp. 446–453, 2018.
[8] З. Ван, Г. Хе, В. Ду и др., «Применение метода разложения оптимизированного вариационного режима параметра
в диагностике неисправности
коробки передач», IEEE Access, т.7, вып. 7,
pp. 44871–44882, 2019.
[9] М. Лажари и А. Садху, «Децентрализованная модальная идентификация
структур с использованием адаптивного эмпирического метода определения
метода композиции», Journal of Sound and Вибрация,
об. 447, pp. 20–41, 2019.
[10] Ф. Би, Т. Ма и X. Ван, «Разработка нового метода определения характеристик детонации
для бензиновых двигателей на основе
вейвлет-шумоподавления и Разложение EMD », Механика
Системы и обработка сигналов, вып.117, pp. 517–536, 2019.
[11] Дж. Ян, Дж. Дай, X. Лю, X. Ву, М. Чен и Х. Цинь,
«Снижение шумов в спектре гамма-излучения с помощью оптимизированное определение порога вейвлета
, основанное на модифицированном генетическом алгоритме углеродного /
кислородного каротажа », Журнал радиоаналитических и ядерных исследований
Chemistry, vol. 320, нет. 2, стр. 351–359, 2019.
[12] Х. Цао, Ю. Чжан, К. Шен, Ю. Лю и Х. Ван, «Температура
Компенсация влияния энергии для гироскопа вибрации MEMS-
прицел на основе метода РБФ НН-ГА-КФ »Шок А Ви-
братион, т.2018, Идентификатор статьи 2830686, 10 страниц, 2018.
[13] К. Шен, Х. Лю, Х. Цао и др., «Схема мозгоподобной навигации
на основе MEMS-INS и распознавания места», Прикладная Наук,
т. 9, вып. 8, стр. 1708, 2019.
[14] Х. Цао, Я. Чжан, З. Хан и др., «Проектирование схемы компенсации полярного нуля
и эксперимент для двухмассового гироскопа
Расширение полосы пропускания МЭМС-гироскопа», IEEE / ASME
Транзакции по мехатронике, т. 24, вып. 2, стр.677–688,
2019.
[15] Ю. Шривастава и Б. Сингх, «Сравнительное исследование подходов EMD
и EEMD для определения частоты вибрации при токарной обработке с ЧПУ
», European Journal of Mechanics-A / Твердые вещества,
об. 73, pp. 381–393, 2019.
[16] HAR Akkar, WAH Hadi и IHM Al-Dosari,
«Реализация пилообразного вейвлета для подавления шума
в одномерном сигнале», Международный журнал
наноэлектроники и материалов, т.12, вып. 1, pp. 67–73, 2019.
[17] С. Чжао, К. Ван и X. Бянь, «Исследование гармонического искажения
на основе порога вейвлета и алгоритма БПФ»,
Системные науки & Control Engineering, т. 6, вып. 3,
pp. 339–345, 2018.
[18] З. Ван, Дж. Чжоу, Дж. Ван и др., «Новый метод диагностики неисправностей
коробки передач, основанный на максимальном эксцессе спектральной
энтропии. деконволюция », IEEE Access, vol. 7. С. 29520–29532,
2019.
[19] К. Петерсен и Б. Уилсон, «Динамическая сложность и средняя сложность выборки
», Динамические системы, т. 33, нет. 3,
pp. 369–418, 2018.
[20] PC Ra alt, J. McCamley, W. Denton, and JM Yentes,
«Частота дискретизации влияет на энтропию кинематики образца
во время ходьбы», Медицинские и Biological Engineering & Com-
путинг, т. 57, нет. 4, pp. 759–764, 2019.
[21] П. Фанг, З. Цай и П. Чжан, «Применение нейронной сети GA-BP
в расчетах земляных работ», Конференция IOP
Series: Материаловедение и инженерия, т.301, нет. 1, 2018.
[22] Н. Гуо, Я. Фанг, З. Тиан и С. Цао, «Исследование SOC нечеткого
взвешенного алгоритмана основе нейронной сети GA-BP и
-амперного интегрального метода», e Journal of Engineering,
vol. 2019, вып. 15, pp. 576–580, 2019.
[23] Y. Shi, Z. Yang, Z. Ma et al., «Разработка системы удара двойной боеголовки
для динамического измерения линейности
. Ускоритель микроэлектромеханической системы (MEMS) с высоким g.
Ом, Датчики, т.16, нет. 6, pp. 582–593, 2016.
[24] Я. Ши, Я. Чжао, Х. Фенг и др., «Проектирование, изготовление и калибровка
акселерометра МЭМС с высоким G», Сенсоры и
Приводы: A. Physical, vol. 279, pp. 733–742, 2018.
[25] Х. Цао, Х. Ли, Х. Шао и др., «Анализ связи мод
для двухмассового гироскопа МЭМС и расширение полосы пропускания
в широком диапазоне». -температурный диапазон »,« Механические системы и обработка сигналов
», вып. 98, стр.448–464, 2018.
[26] К. Шен, Дж. Ли, Х. Чжан, Дж. Тан, Х. Цао и Дж. Лю, «Обработка температурных ошибок параллельной шкалы Multi-
для двухмассовых
МЭМС-гироскоп, Датчики и исполнительные механизмы A: Physical,
vol. 245, pp. 160–168, 2016.
[27] Х. Го, Ю. Чен, Д. Ву и др. «Плазмонно-усиленная чувствительность
спиновых сенсоров на основе алмазного ансамбля никеля.
центров окраски трогеновых вакансий // Письма в оптике. 42, нет. 3,
с.403–406, 2017.
[28] Х. Гуо, К. Чжу, Дж. Тан и др., «Метод обнаружения синхронизации
температуры и влажности на основе СВЧ-резонатора
», Датчики и исполнительные механизмы B : Химическая промышленность,
т. 261, pp. 434–440, 2018.
Удар и вибрация 13
Прикладные науки | Бесплатный полнотекстовый | Компенсация температурного дрейфа для акселерометра МЭМС с высокими перегрузками на основе усовершенствованного метода RBF NN
Высокодиапазонный, ударопрочный акселерометр с микромеханической системой (МЭМС) с высоким диапазоном G (HGMA) имеет важные применения в навигации, защите и измерении ударов [1].Температура является основной причиной ограничения точности акселерометра MEMS с большим ускорением. Большое количество исследований было посвящено улучшению температурных характеристик акселерометра MEMS с большим ускорением. В общем, существует два основных метода температурной компенсации: методы аппаратной компенсации и методы программной компенсации. Аппаратные методы включают оптимизацию структуры акселерометра MEMS или управление рабочей температурой акселерометра MEMS. Например: Лю предложил метод температурной компенсации высокоточного емкостного МЭМС-акселерометра, основанный на паразитном сопротивлении [2].Ли разработал новую дифференциальную кремниевую подложку, которая может значительно уменьшить температурный дрейф акселерометра [3]. Цай разработал акселерометр с дополнительной микроэлектромеханической системой (МЭМС) металл-оксид-полупроводник (CMOS). Акселерометр имеет более высокую чувствительность и значительно подавляет температурный дрейф [4]. Сюй предложил интегрированную систему INS / uwb на основе uffb, чтобы эффективно уменьшить погрешность дрейфа датчика [5]. Янг предложил использовать в архитектуре датчик температуры на кристалле для достижения температурной компенсации на кристалле и микронагреватель для реализации контроля температуры датчика на кристалле [6].Цао проанализировал метод компенсации шума и температуры гироскопа MEMS и изучил структуру интерфейса схемы и полосу пропускания датчика MEMS, эффективно подавляя шум датчика MEMS [7,8,9,10]. В определенной степени метод аппаратной компенсации не только увеличивает объем и потребляемую мощность акселерометра, но и увеличивает затраты, поэтому аппаратный метод не применим в приложениях, требующих низкой стоимости и низкого энергопотребления. программный метод, который изучает закон между температурой и выходным сигналом MEMS-акселерометра, а затем устанавливает модель температурного дрейфа для компенсации эффектов температурного дрейфа.Например: Ли предположил, что влияние изменений температуры на акселерометры можно уменьшить путем точного прогнозирования и компенсации температурной чувствительности резонансной частоты [11]. Ли изучил статическую температурную математическую модель кварцевого гибкого акселерометра, чтобы затем получить температурную компенсацию акселерометра с помощью DSP [12]. Доминик сочетает экспериментальный метод с методом численного моделирования для обеспечения ускорения керамики с хорошей точностью в условиях высоких температур [13].Янг предложил новую простую математическую модель, которая делает выходной сигнал датчика более устойчивым при высоких температурах, который был успешно применен к двум недорогим кварцевым акселерометрам [14]. Он создал аналитическую модель температурного дрейфа смещения (TDB) и температурного дрейфа масштабного фактора (TDSF), которая основана на результатах анализа температурной деформации и температурной зависимости жесткости. Эта модель может эффективно повысить точность кремниевого емкостного акселерометра MEMS [15].Цао предложил использовать несколько факторов замирания для сильного следящего фильтра Калмана (STKF), который может лучше адаптироваться к неопределенности модели ошибки акселерометра [16]. Руцца получил исходные данные посредством температурного теста и установил полиномиальное уравнение низкого порядка, объединив его с ошибкой измерения, вызванной тепловым дрейфом, а затем использовал их в компенсации температурного дрейфа акселерометра [17]. Шен предложил алгоритм параллельной обработки температурной ошибки, основанный на вариационной модовой декомпозиции (VMD) и расширенном нелинейном дифференцирующем устройстве (AND), который может повысить эффективность обработки температурной ошибки [18].Чжан предложил полную аналитическую модель, основанную на принципе Гамилона, которая открывает новые перспективы для изучения взаимосвязи между температурой и нелинейностью [19]. Ченг предложил модификацию нейронной сети с радиальной базисной функцией (RBF ANN), основанную на моделях температурной компенсации для интерферометрических волоконно-оптических гироскопов (IFOG) [20]. Хуанг предложил разработать соответствующий фильтр в соответствии с различными моделями ошибок; затем они объединили многомодельный метод с методом расширенного фильтра Калмана (EKF) для оптимальной оценки состояния, что повысило точность и эффективность датчика [21].Сюй предложил объединенный фильтр с расширенной конечной импульсной характеристикой (EFIR) для повышения точности датчика [22]. Шен предложил новую модель с несколькими входами и одним выходом на основе генетического алгоритма (GA) и нейронной сети Эльмана (Elman NN) для повышения точности моделирования температурного дрейфа датчика [23]. Ся предложил модель прогнозирования и управления температурой, основанную на методе управления BP NN и Fuzzy-PID, которая может успешно уменьшить выходной сигнал с нулевой скоростью [24]. Программные методы предлагают преимущества простой структуры, низкой стоимости и удобной реализации, а также удобны для повышения точности акселерометра MEMS.RBF NN на основе GA был предложен и успешно применен к модели температурного дрейфа гироскопа MEMS [25]. В отличие от предыдущих моделей температурного дрейфа акселерометра, в этой статье был предложен новый алгоритм объединения (RBF + NN + GA + KF в сочетании с моделью температурного дрейфа), чтобы сделать акселерометр более точным. Новый алгоритм учитывает не только температуру и скорость изменения температуры, но и температурный продукт.Выбор наиболее подходящего акселерометра МЭМС для вашего приложения — Часть 1
Введение
Акселерометрыспособны измерять ускорение, наклон, вибрацию или удары и, как следствие, используются в самых разных приложениях, от носимых фитнес-устройств до систем стабилизации промышленных платформ.Есть сотни деталей на выбор со значительным диапазоном стоимости и производительности. В первой части этой статьи обсуждаются ключевые параметры и функции, о которых должен знать проектировщик, и их отношение к приложениям для наклона и стабилизации, что помогает проектировщику выбрать наиболее подходящий акселерометр. Часть 2 будет посвящена носимым устройствам, мониторингу на основе состояния (CBM) и приложениям Интернета вещей.
Новейшие емкостные акселерометры MEMS находят применение в приложениях, где традиционно преобладали пьезоэлектрические акселерометры и другие датчики.Такие приложения, как CBM, мониторинг состояния конструкций (SHM), мониторинг состояния активов (AHM), мониторинг показателей жизнедеятельности (VSM) и беспроводные сенсорные сети IoT — это области, в которых датчики MEMS нового поколения предлагают решения. Однако с таким количеством акселерометров и таким количеством приложений выбор подходящего может легко запутать.
Не существует отраслевого стандарта, определяющего, к какой категории относится акселерометр. Обычно акселерометры классифицируются по категориям, и соответствующие приложения показаны в таблице 1.Показанные значения полосы пропускания и диапазона g- являются типичными для акселерометров, используемых в перечисленных конечных приложениях.
| Акселерометр, класс | Основное приложение | Пропускная способность | g- Диапазон |
| Потребитель | Движение, статическое ускорение | 0 Гц | 1 г |
| Автомобильная промышленность | Сбой / стабильность | 100 Гц | <200 г /2 г |
| Промышленное | Платформа для устойчивости / наклона | от 5 Гц до 500 Гц | 25 г |
| Тактический | Оружие / корабельная навигация | <1 кГц | 8 г |
| Навигация | Подводная лодка / плавсредство | > 300 Гц | 15 г |
На рис. 1 показан снимок ряда акселерометров MEMS, и каждый датчик классифицируется на основе ключевых показателей производительности для конкретного приложения и уровня интеллекта / интеграции.Основное внимание в этой статье уделяется акселерометрам следующего поколения, основанным на усовершенствованных структурах MEMS и обработке сигналов, а также технологиях упаковки мирового класса, обеспечивающих стабильность и шумовые характеристики, сопоставимые с более дорогими нишевыми устройствами, при меньшем потреблении энергии. Эти атрибуты и другие важные характеристики акселерометра обсуждаются более подробно в следующих разделах в зависимости от актуальности приложения.
Рис. 1. Область применения некоторых акселерометров MEMS компании Analog Devices.Обнаружение наклона или наклона
Ключевые критерии: стабильность смещения, смещение по температуре, низкий уровень шума, повторяемость, устранение вибрации, чувствительность к поперечным осям.
Точное определение наклона или наклона — это сложная задача для емкостных акселерометров MEMS, особенно при наличии вибрации. Использование емкостных акселерометров MEMS для достижения точности наклона 0,1 ° в динамических условиях очень сложно — <1 ° трудно, а> 1 ° очень достижимо. Чтобы акселерометр мог эффективно измерять наклон или наклон, необходимо хорошо понимать характеристики датчика и условия конечного применения.Статическая среда обеспечивает гораздо лучшие условия для измерения наклона по сравнению с динамической средой, потому что вибрация или удары могут повредить данные наклона и привести к значительным ошибкам в измерениях. Наиболее важными характеристиками для измерения наклона являются временное смещение, гистерезис, низкий уровень шума, краткосрочная / долгосрочная стабильность, повторяемость и хорошее устранение вибрации.
Ошибки, такие как нуль- г погрешность смещения, ноль- г Смещение смещения из-за пайки, ноль- г Смещение смещения из-за выравнивания корпуса печатной платы, ноль- г температура смещения, точность чувствительности и температура, нелинейность , и поперечная осевая чувствительность наблюдаются и могут быть уменьшены с помощью процессов калибровки после сборки.Другие термины ошибки, такие как гистерезис, смещение нуля — г, смещение за срок службы, изменение чувствительности в течение срока службы, смещение нуля — г, смещение из-за влажности, а также изгиб и скручивание печатной платы из-за колебаний температуры с течением времени, не могут быть учтены при калибровке. , или же они требуют снижения некоторого уровня обслуживания на месте.
Ассортимент акселерометровAnalog Devices можно разделить на части специального назначения: MEMS (ADXLxxx) и i Sensor ® (ADIS16xxx). i Датчик или интеллектуальные датчики имеют высокую степень интеграции (от 4 ° до 10 ° свободы) и программируемые части, используемые в сложных приложениях в динамических условиях.Эти высокоинтегрированные plug-and-play решения включают полную заводскую калибровку, встроенную компенсацию и обработку сигналов, решая многие из описанных выше ошибок при обслуживании на месте и значительно снижая затраты на проектирование и проверку. Эта обширная заводская калибровка характеризует всю сигнальную цепь датчика по чувствительности и смещению в указанном диапазоне температур, обычно от -40 ° C до + 85 ° C. В результате каждая деталь датчика i имеет свои собственные уникальные формулы коррекции, позволяющие производить точные измерения при установке.Для некоторых систем заводская калибровка устраняет необходимость калибровки на уровне системы и значительно упрощает ее для других.
i Детали датчика специально предназначены для определенных приложений. Например, ADIS16210, показанный на рис. 2, был разработан и адаптирован специально для работы с наклоном и, как следствие, может сразу предлагать относительную точность <1 °. В значительной степени это связано с интегрированной обработкой сигналов и калибровкой конкретного устройства для обеспечения оптимальной точности. i Датчики рассматриваются далее в разделе стабилизации.
Рис. 2. Прецизионный трехосный наклонный элемент ADIS16210.Архитектуры акселерометров последнего поколения, такие как ADXL355, более универсальны (наклон, мониторинг состояния, работоспособность конструкции, приложения IMU / AHRS) и содержат меньше специализированных, но все же многофункциональных интегрированных блоков, как показано на рисунке 3.
Рис. 3. Трехосевой МЭМС-акселерометр ADXL355 с низким уровнем шума, малым дрейфом и низким энергопотреблением.В следующем разделе сравнивается ADXL345, акселерометр общего назначения, с акселерометром нового поколения с низким уровнем шума, малым дрейфом и малым энергопотреблением ADXL355, который идеально подходит для использования в широком спектре приложений, таких как узлы датчиков IoT и инклинометры. .Это сравнение рассматривает источники ошибок в приложении наклона и то, какие ошибки можно компенсировать или устранить. В таблице 2 приведены оценки идеальных рабочих характеристик акселерометров ADXL345 потребительского уровня и соответствующие ошибки наклона. Пытаясь добиться максимально возможной точности наклона, обязательно применять какую-либо форму стабилизации или компенсации температуры. В этом примере предполагается постоянная температура 25 ° C. Наибольшие факторы ошибки, которые не могут быть полностью скомпенсированы, — это смещение из-за температуры, дрейфа смещения и шума.Полоса пропускания может быть уменьшена для уменьшения шума, поскольку приложениям наклона обычно требуется полоса пропускания ниже 1 кГц.
| Параметр датчика | Производительность | Состояние / Примечание | Типичная ошибка приложения г Наклон ° | |
| Шум | Ось X / Y 290 мкм г / √ (Гц) | Пропускная способность на 6.25 Гц | 0,9 м г | 0,05 ° |
| Смещение смещения | Отклонение Аллана | Кратковременная ось X / Y (например, 10 дней) | 1 м г | 0,057 ° |
| Начальное смещение | 35 м г | Компенсация отсутствует | 35 м г | 2 ° |
| С компенсацией | 0 м г | 0 ° | ||
| Ошибка | Компенсация отсутствует | 6.Полоса пропускания 25 Гц | 36,9 м г | 2,1 ° |
| Ошибка | С компенсацией | Ширина полосы 6,25 Гц | 1,9 м г | 0,1 ° |
В таблице 3 показаны те же критерии для ADXL355. Краткосрочные значения систематической ошибки оценивались на основе графиков корневой дисперсии Аллана в таблице данных ADXL355. При 25 ° C точность скомпенсированного наклона оценивается как 0.1 ° для ADXL345 общего назначения. Для промышленного класса ADXL355 расчетная точность наклона составляет 0,005 °. Сравнивая ADXL345 и ADXL355, можно увидеть, что факторы, вносящие большие ошибки, такие как шум, были значительно уменьшены с 0,05 ° до 0,0045 ° и дрейф смещения с 0,057 ° до 0,00057 ° соответственно. Это демонстрирует огромный скачок в характеристиках емкостного акселерометра MEMS с точки зрения шума и дрейфа смещения, что обеспечивает гораздо более высокие уровни точности наклона в динамических условиях.
| Параметр датчика | Производительность | Состояние / Примечание | Типичная ошибка приложения г Наклон ° | |
| Шум | 25 мкм г / √ (Гц) | Полоса пропускания при 6,25 Гц | 78 мкм г | 0,0045 ° |
| Смещение смещения | Отклонение Аллана | Кратковременная ось X / Y (например, 10 дней) | <10 мкм г | 0.00057 ° |
| Начальное смещение | 25 м г | Компенсация отсутствует | 25 м г | 1,43 ° |
| С компенсацией | 0 м г | 0 ° | ||
| Общая ошибка | Компенсация отсутствует | Ширина полосы 6,25 Гц | 25 м г | 1.43 ° |
| Общая ошибка | С компенсацией | Ширина полосы 6,25 Гц | 88 мкм г | 0,005 ° |
Выбор акселерометра более высокого класса имеет решающее значение для достижения требуемых характеристик, особенно если ваше приложение требует точности наклона менее 1 °. Точность применения может варьироваться в зависимости от условий применения (большие колебания температуры, вибрация) и выбора датчика (потребительский или потребительский.промышленный или тактический ранг). В этом случае ADXL345 потребует значительных усилий по компенсации и калибровке для достижения точности наклона <1 °, что увеличивает общие усилия и затраты на систему. В зависимости от величины вибрации в конечной среде и температурного диапазона это может быть даже невозможно. При температуре от 25 ° C до 85 ° C дрейф смещения tempco составляет 1,375 °, что уже превышает требования для точности наклона менее 1 °.
Для ADXL355 максимальный дрейф смещения температуры от 25 ° C до 85 ° C равен 0.5 °.
Воспроизводимость ADXL354 и ADXL355 (± 3,5 м, г, / 0,2 ° для X и Y, ± 9 м, г, / 0,5 ° для Z), рассчитана на 10-летний срок службы и включает смены из-за срока службы при высоких температурах. тест (HTOL) (T A = 150 ° C, V SUPPLY = 3,6 В и 1000 часов), температурный цикл (от -55 ° C до + 125 ° C и 1000 циклов), случайное блуждание скорости, широкополосный шум , и температурный гистерезис. Обеспечивая воспроизводимое измерение наклона при любых условиях, эти новые акселерометры обеспечивают минимальную ошибку наклона без обширной калибровки в суровых условиях, а также сводят к минимуму необходимость калибровки после развертывания.Акселерометры ADXL354 и ADXL355 обеспечивают гарантированную температурную стабильность с нулевым коэффициентом смещения 0,15 м г / ° C (максимум). Стабильность сводит к минимуму ресурсы и затраты, связанные с калибровкой и тестированием, помогая OEM-производителям устройств достичь более высокой производительности. Кроме того, герметичная упаковка помогает гарантировать, что конечный продукт будет соответствовать его характеристикам повторяемости и стабильности еще долгое время после того, как он покинет завод.
Как правило, повторяемость и устойчивость к погрешностям устранения вибрации (VRE) не показаны в технических паспортах, так как они являются потенциальным индикатором более низкой производительности.Например, ADXL345 — это акселерометр общего назначения, предназначенный для потребительских приложений, где VRE не является основной проблемой для дизайнеров. Однако в более требовательных приложениях, таких как инерциальная навигация, наклонные приложения или особые среды, богатые вибрацией, невосприимчивость к VRE, вероятно, будет главной заботой разработчика и, следовательно, ее включение в данные ADXL354 / ADXL355 и ADXL356 / ADXL357. листы.
VRE, как показано в таблице 4, представляет собой ошибку смещения, возникающую при воздействии на акселерометры широкополосной вибрации.Когда акселерометр подвергается вибрации, VRE вносит значительную ошибку в измерения наклона по сравнению со смещением 0 g по температуре и шуму. Это одна из основных причин, по которой он не фигурирует в технических характеристиках, поскольку он может очень легко затмить другие ключевые спецификации.
VRE — это реакция акселерометра на колебания переменного тока, которые выпрямляются до постоянного. Эти выпрямленные колебания постоянного тока могут сместить смещение акселерометра, что приведет к значительным ошибкам, особенно в приложениях с наклоном, где интересующим сигналом является выходной сигнал постоянного тока.Любое небольшое изменение смещения постоянного тока можно интерпретировать как изменение наклона и привести к ошибкам на уровне системы.
| Деталь | Максимальная ошибка наклона 0 г Смещение в зависимости от температуры (° / ° C) | Плотность шума (° / √ (Гц)) | Устранение вибрации (° / г 2 среднеквадратичное значение) |
| ADXL354 | 0.0085 | 0,0011 | 0,023 1 |
| ADXL355 | 0,0085 | 0,0014 | 0,023 1 |
| 1 ± 2 г- диапазон в ориентации 1 г , смещение из-за вибрации 2,5 г среднеквадратичного значения. | |||
VRE может быть вызвано различными резонансами и фильтрами внутри акселерометра, в данном случае ADXL355, из-за того, что VRE сильно зависит от частоты.Вибрации усиливаются этими резонансами с коэффициентом, равным добротности резонанса, и будут гасить колебания на более высоких частотах из-за 2 -го порядка 2-полюсного отклика резонатора. Чем больше резонанс добротности датчика, тем больше VRE из-за большего усиления вибраций. Большая ширина полосы измерения приводит к интеграции высокочастотных внутриполосных вибраций, что приводит к более высокому VRE, как показано на рисунке 4. Многих проблем, связанных с вибрацией, можно избежать, выбрав подходящую полосу пропускания для акселерометра, чтобы отклонить высокочастотные колебания. 1
Рисунок 4. Тест ADXL355 VRE при разной полосе пропускания.Для измерения статического наклона обычно требуются акселерометры г с малой массой от ± 1 г до ± 2 г с полосой пропускания менее 1,5 кГц. Аналоговый выход ADXL354 и цифровой выход ADXL355 имеют низкую плотность шума (20 μ g √Hz и 25 μ g √Hz соответственно), низкий 0 g дрейф смещения, малое энергопотребление, 3-осевые акселерометры с встроенные датчики температуры и выбираемые диапазоны измерения, как показано в таблице 5.
| Деталь | Диапазон измерений ( г ) | Полоса пропускания (кГц) |
| ADXL354B | ± 2, ± 4 | 1,5 |
| ADXL354C | ± 2, ± 8 | 1,5 |
| ADXL355B | ± 2, ± 4, ± 8 | 1 |
| ADXL356B | ± 10, ± 20 | 1.5 |
| ADXL356C | ± 10, ± 40 | 1,5 |
| ADXL357B | ± 10,24, ± 20,48, ± 40,96 | 1 |
ADXL354 / ADXL355 и ADXL356 / ADXL357 поставляются в герметичном корпусе, что обеспечивает превосходную долгосрочную стабильность. Прирост производительности благодаря пакету обычно масштабируется, как показано на рисунке 5. Пакет часто упускается из виду с точки зрения того, что производитель может сделать, чтобы добавить дополнительную производительность в отношении стабильности и дрейфа.Это было ключевым направлением деятельности Analog Devices, что можно увидеть в широком спектре типов корпусов датчиков, которые мы предлагаем для различных областей применения.
Высокотемпературные и динамические среды
До появления акселерометров, рассчитанных на работу при высоких температурах или в суровых условиях, некоторые разработчики были вынуждены использовать стандартные температурные ИС, выходящие далеко за пределы, указанные в технических характеристиках. Это означает, что конечный пользователь берет на себя ответственность и риск аттестации компонента при повышенных температурах, что является дорогостоящим и требует много времени.Хорошо известно, что герметичные герметичные упаковки устойчивы к повышенным температурам и обеспечивают барьер против влаги и загрязнений, вызывающих коррозию. Компания Analog Devices предлагает ряд герметичных деталей, обеспечивающих повышенную стабильность и характеристики при повышенных температурах. Компания Analog Devices также проделала значительную работу по изучению характеристик пластиковых корпусов при повышенных температурах, в частности, выводной рамки и выводов на способность соответствовать процессам высокотемпературной пайки и обеспечения надежного крепления в условиях сильных ударов и вибрации.В результате Analog Devices предлагает 18 акселерометров с указанным диапазоном температур от -40 ° C до + 125 ° C, включая ADXL206, ADXL354 / ADXL355 / ADXL356 / ADXL357, ADXL1001 / ADXL1002, ADIS16227 / ADIS16228 и ADIS16209. Большинство конкурентов не предлагают емкостные акселерометры MEMS, способные работать при температурах от -40 ° C до + 125 ° C или в суровых условиях окружающей среды, таких как тяжелое промышленное оборудование, бурение и разведка скважин.
Рисунок 5. Примеры увеличения производительности за счет передовых методов упаковки и калибровки.Выполнение измерений наклона в очень суровых условиях с температурой выше 125 ° C — чрезвычайно сложная задача. ADXL206 — это высокоточный (точность наклона <0,06 °), маломощный, полнофункциональный двухосевой МЭМС-акселерометр для использования в условиях высоких температур и суровых условий, таких как бурение и разведка скважин. Эта деталь поставляется в керамическом корпусе размером 13 мм × 8 мм × 2 мм, припаянном по бокам, с двойным расположением рядов, что позволяет работать в диапазоне температур окружающей среды от -40 ° C до + 175 ° C, с ухудшающимися характеристиками выше 175 ° C. со 100% восстанавливаемостью.
Для измерения угла наклона в динамических средах, где присутствует вибрация, например, в сельскохозяйственном оборудовании или дронах, требуются акселерометры с более высоким диапазоном g- , такие как ADXL356 / ADXL357. Измерения акселерометра в ограниченном диапазоне г могут привести к отсечению, которое приводит к добавлению дополнительного смещения к выходному сигналу. Ограничение может происходить из-за того, что ось чувствительности находится в поле силы тяжести 1 г , или из-за ударов с быстрым временем нарастания и медленным затуханием.При более высоком диапазоне g ограничение акселерометра уменьшается, что снижает смещение, что приводит к повышению точности наклона в динамических приложениях.
На рисунке 6 показано измерение с ограничением диапазона г по оси Z ADXL356, при этом 1 г уже присутствует в этом диапазоне измерения. На рисунке 7 показано то же измерение, но с диапазоном г , увеличенным с ± 10 г до ± 40 г . Хорошо видно, что смещение из-за ограничения значительно уменьшается при расширении диапазона g акселерометра.
ADXL354 / ADXL355 и ADXL356 / ADXL357 обеспечивают превосходное устранение вибраций, долгосрочную воспроизводимость и низкий уровень шума в небольшом форм-факторе и идеально подходят для измерения наклона / наклона как в статической, так и в динамической среде.
Рисунок 6. ADXL356 VRE, смещение оси Z от 1 g, диапазон ± 10 g, ориентация оси Z = 1 g. Рисунок 7. ADXL356 VRE, смещение оси Z от 1 g, диапазон ± 40 g, Z- ориентация оси = 1 г.Стабилизация
Ключевые критерии: плотность шума, случайное блуждание скорости, стабильность смещения во время выполнения, повторяемость смещения и полоса пропускания.
Обнаружение и понимание движения может повысить ценность многих приложений. Ценность возникает из-за использования движения, которое испытывает система, и его преобразования в улучшенную производительность (уменьшенное время отклика, более высокую точность, более высокую скорость работы), повышенную безопасность или надежность (отключение системы в опасных ситуациях) или другие дополнительные функции. . Существует большой класс приложений стабилизации, которые требуют комбинации гироскопов с акселерометрами (сочетание датчиков), как показано на рисунке 8, из-за сложности движения — например, в оборудовании наблюдения на базе БПЛА и системах наведения антенн, используемых на кораблях. . 2
Рисунок 8. Шесть степеней свободы IMU.Шесть степеней свободы В IMU используется несколько датчиков, поэтому они могут компенсировать слабые места друг друга. То, что может показаться простым инерционным движением по одной или двум осям, на самом деле может потребовать объединения датчиков акселерометра и гироскопа, чтобы компенсировать вибрацию, силу тяжести и другие воздействия, которые только акселерометр или гироскоп не сможет точно измерить. Данные акселерометра состоят из гравитационной составляющей и ускорения движения.Их нельзя разделить, но можно использовать гироскоп, чтобы удалить гравитационную составляющую из выходного сигнала акселерометра. Ошибка из-за гравитационного компонента данных акселерометра может быстро стать большой после необходимого процесса интегрирования для определения положения по ускорению. Из-за накопления ошибок одного гироскопа для определения положения недостаточно. Гироскопы не воспринимают гравитацию, поэтому их можно использовать в качестве опорного датчика вместе с акселерометром.
В приложениях стабилизации датчик MEMS должен обеспечивать точные измерения ориентации платформы, особенно когда она находится в движении.Блок-схема типичной системы платформы стабилизации платформы, в которой используются серводвигатели для коррекции углового движения, показана на рисунке 9. Контроллер серводвигателя / обратной связи преобразует данные датчиков ориентации в корректирующие управляющие сигналы для серводвигателей.
Рисунок 9. Базовая система стабилизации платформы. 3Конечное приложение будет определять требуемый уровень точности, а качество датчика, выбранного потребительского или промышленного класса, будет определять, достижимо это или нет.Важно различать устройства потребительского уровня и устройства промышленного класса, и иногда это может потребовать внимательного рассмотрения, поскольку различия могут быть незначительными. В таблице 6 показаны основные различия между акселерометром потребительского и промышленного уровня, интегрированным в IMU.
| Параметр акселерометра | Типовая промышленная спецификация | Улучшение по сравнению с обычным потребительским устройством |
| Динамический диапазон | До 40 г | 3 × |
| Плотность шума | 25 мкм г / √Гц | 10 × |
| Случайное блуждание скорости | 0.03 м / с / √Гц | 10 × |
| Стабильность смещения во время работы | 10 мкм г | 10 × |
| Повторяемость смещения | 25 м г | 100 × 90 401 |
| Полоса пропускания –3 дБ | 500 Гц | 2 × |
В некоторых случаях, когда условия благоприятны и приемлемы неточные данные, устройство с низкой точностью может обеспечить адекватную производительность.Тем не менее, требования к датчику в динамических условиях быстро растут, и детали с более низкой точностью сильно страдают из-за невозможности уменьшить эффекты вибрации от фактических измерений или температурных воздействий, поэтому из-за этого возникают проблемы с измерением точности наведения ниже 3 ° — 5 °. Большинство потребительских устройств низкого уровня не предоставляют спецификации для таких параметров, как устранение вибрации, угловое случайное блуждание и другие параметры, которые на самом деле могут быть основными источниками ошибок в промышленных приложениях.
Для измерения точности наведения от 1 ° до 0,1 ° в динамических условиях выбор детали проектировщиком должен быть сосредоточен на способности датчиков отклонять погрешность дрейфа при воздействии температуры и вибрации. Хотя фильтрация сенсоров и алгоритмы (объединение сенсоров) являются критически важным элементом в достижении улучшенных характеристик, они не способны устранить пробелы в характеристиках от сенсора потребительского уровня к сенсору промышленного уровня. Промышленные IMU нового класса Analog Devices достигают характеристик, близких к тем, которые использовались в системах наведения ракет предыдущего поколения.Такие компоненты, как ADIS1646x и анонсированный ADIS1647x, могут обеспечивать точное обнаружение движения в форм-факторах стандартного и мини-IMU, открывая то, что раньше было нишевой областью применения.
Во второй части этой статьи мы продолжим изучение ключевых характеристик производительности акселерометров MEMS и того, как они соотносятся с такими областями приложений, как носимые устройства, мониторинг на основе состояния и IoT, включая мониторинг состояния конструкций и мониторинг состояния активов.
использованная литература
1. Лонг Фам и Энтони Дезимоун. «Устранение вибрации в акселерометрах MEMS». Analog Devices, Inc., 2017
2. Боб Сканнелл. «Высокоэффективные инерционные датчики, продвигающие Интернет движущихся вещей». Analog Devices, Inc., 2017.
3. Марк Луни. «Анализ частотной характеристики инерциальных МЭМС в системах стабилизации». Аналоговый диалог , Vol. 46, 2012.
Измерение | enDAQ
Фильтрация может использоваться для удаления нежелательного частотного содержимого и должна быть важной частью вашей оценки различных систем сбора данных.Фильтры верхних частот устраняют низкочастотную вибрацию и присущи всем пьезоэлектрическим акселерометрам (резистор и конденсатор, включенные последовательно), что дает этим акселерометрам отклик по переменному току. Однако фильтры нижних частот более важны для предотвращения наложения спектров, которые нельзя отфильтровать с помощью программного обеспечения. Наложение спектров приводит к тому, что сигнал становится неразличимым или выглядит как совершенно другой сигнал, как показано на рисунке 7. Важно понимать, что аналоговый фильтр нижних частот необходим для предотвращения наложения спектров.Как только сигнал имеет псевдоним, он не может быть отфильтрован в цифровом виде в программном обеспечении.
Рис. 7. Синусоидальная волна 60 Гц при дискретизации 100 Гц может ошибочно сделать профиль вибрации похожим на сигнал 40 Гц.
Остается вопрос, какой фильтр типа типа использовать? Идеальный фильтр будет равномерно пропускать все частоты ниже указанного предела и исключать все частоты выше этого предела. Этот идеальный фильтр имел бы идеально линейную фазовую характеристику до того же верхнего предела частоты.Но идеальных фильтров не существует; есть некоторый компромисс, который необходимо сделать в отношении амплитудной и фазовой характеристики фильтра. Существует четыре основных типа фильтров:
- Баттерворт
Фильтр Баттерворта известен своей максимально ровной амплитудной характеристикой и достаточно линейной фазовой характеристикой. Фильтр Баттерворта является наиболее популярным для испытаний на вибрацию.
- Бессель
Фильтр Бесселя имеет почти идеальную линейность фазы, поэтому он лучше всего подходит для переходных процессов, таких как ударные испытания.Он имеет довольно хороший амплитудный отклик, но его спад амплитуды медленнее, чем у фильтра Баттерворта или Чебышева.
- Чебышев
Чебышев имеет более быстрый спад амплитудной характеристики, который достигается за счет введения пульсации перед спадом. У них относительно нелинейный фазовый отклик.
- Эллиптический
Эллиптический фильтр имеет самый крутой спад амплитудной характеристики, но имеет колебания как в полосе пропускания, так и в полосе заграждения.Кроме того, его фазовая характеристика сильно нелинейна. Это используется только для приложений, в которых фазовый сдвиг или звенящий сигнал не важны; Обычно этого следует избегать обычному инженеру-испытателю из-за его склонности искажать сложные временные сигналы.
На рисунке 8 производительность этих фильтров сравнивается для частоты среза 1000 Гц и 5 фильтров порядка -го порядка . Графики были сгенерированы в MATLAB с использованием Signal Processing Toolbox и функций аналогового фильтра.На рисунке 9 более подробно рассматриваются характеристики фильтра в полосе пропускания (от 0 до 1000 Гц). Фильтры Чебышева и Эллиптические фильтры обеспечивают более резкий спад амплитуды, но за счет большой ряби в полосе пропускания и нелинейности. Фильтры Баттерворта предлагают лучшее из обоих миров с относительно резким спадом амплитуды. У Бесселя лучший фазовый отклик и достаточно хороший амплитудный отклик, но обратите внимание, как рано он начинает фильтрацию; и в полосе задерживания он все еще позволяет более 10% сингла примерно до 2.В 5 раз больше частоты среза.
Рисунок 8: Различные типы фильтров сравниваются по их амплитудной характеристике и фазе для фильтра порядка 1000 Гц 5 -го .
Рис. 9. Различные типы фильтров сравниваются в полосе пропускания по их амплитудной характеристике и фазе для фильтра 5-го порядка с частотой 1000 Гц.
Какой фильтр вы выберете, зависит от вашего приложения; но в целом фильтр Баттерворта лучше всего подходит для испытаний на вибрацию, а фильтр Бесселя — для испытаний на удар. И, прежде всего, вам следует избегать системы, которая не предлагает некоторую фильтрацию нижних частот, чтобы избежать наложения спектров.
Емкостный акселерометр— обзор
Емкостный акселерометр
Емкостный акселерометр аналогичен по работе пьезорезистивным акселерометрам в том, что они измеряют изменение через мост; однако вместо измерения изменения сопротивления они измеряют изменение емкости. Чувствительный элемент состоит из двух параллельных пластинчатых конденсаторов, работающих в дифференциальном режиме. Эти конденсаторы работают в мостовой конфигурации и зависят от схемы демодулятора несущей или ее эквивалента для получения электрического выходного сигнала, пропорционального ускорению.
Существует несколько различных типов емкостных элементов. Один тип, в котором используются металлическая чувствительная диафрагма и пластины конденсатора из оксида алюминия, показан на рисунке 5.3.02. Две неподвижные пластины окружают диафрагму, образуя два конденсатора, каждый с отдельной фиксированной пластиной и каждый разделяет диафрагму в качестве подвижной пластины.
Рисунок 5.3.02. Конструкция емкостного чувствительного элемента.
Когда этот элемент помещается в гравитационное поле Земли или ускоряется из-за вибрации испытательной конструкции, на пружинную массу действует сила.Эта сила пропорциональна массе пружины и основана на втором законе движения Ньютона.
Ур. 5.3.0F = mawhereF = сила инерции, действующая на пружину — масса m = распределенная масса пружины — масса a = ускорение, испытываемое чувствительным элементом
Следовательно, масса пружины отклоняется линейно в соответствии с уравнением пружины.
Ур. 5.2.2X = F / k, где X = отклонение пружины-массы k = жесткость пружины-массы
Результирующее отклонение пружинной массы приводит к изменению расстояния между электродами и пружинной массой.Эти изменения оказывают прямое влияние на каждый из противоположных зазоров конденсаторов в соответствии со следующим уравнением.
Ур. 5.2.3 C2 = AE [ɛ / (d + X)] и C2 = AE [ɛ / (d − X)], где C = емкость элемента AE = площадь поверхности электрода = диэлектрическая проницаемость воздуха d = расстояние между массой пружины и электродом
Для правильной работы емкостного акселерометра требуется встроенная электронная схема. В простейшем смысле встроенная схема выполняет две основные функции: (1) позволяет изменениям емкости быть полезными для измерения как статических, так и динамических событий и (2) преобразовывать это изменение в полезный сигнал напряжения, совместимый с приборами считывания.
Типичная схема показана на рис. 5.3.03 и рис. 5.3.04, которые графически изображают работу во временной области, возникающую в результате ввода статической измеряемой величины.
Рисунок 5.3.03 и Рисунок 5.3.04. Работа встроенной схемы емкостного акселерометра.
Следующее объяснение начинается с начала схемы и продолжается до выхода и описывает работу схемы.
Для начала напряжение питания подается через регулятор напряжения, который обеспечивает стабилизированное постоянное напряжение в цепи.Устройство обеспечивает «чистую» мощность для работы внутренних схем и фиксирует амплитуду встроенного генератора, который обычно работает на частоте> 1 МГц. Благодаря поддержанию постоянной амплитуды сигнала генератора выходная чувствительность устройства становится постоянной и независимой от напряжения питания. Затем сигнал генератора направляется в емкостной мост, как показано точкой 1 на рисунке 5.3.03. Затем он разделяется и проходит через каждое плечо моста, каждое из которых действует как разделительная сеть.Сети делителей заставляют сигнал генератора изменяться прямо пропорционально изменению емкости в C 2 и C 4 . (C 2 и C 4 электрически представляют механический чувствительный элемент.) Результирующие амплитудно-модулированные сигналы появляются в точках 2 и 3. Наконец, чтобы «демодулировать» эти сигналы, они проходят через отдельные схемы выпрямления / снятия пиков в точках 2 и 3. Точки 4 и 5, а затем суммируются в точке 6. В результате получается электрический сигнал, пропорциональный физическому входу.
На этом этапе будет достаточно замкнуть цепь; однако для повышения производительности часто добавляются дополнительные функции. В этом случае был включен усилитель «стандартизации». Обычно это используется для подстройки чувствительности устройства, чтобы она попадала в более жесткий допуск. В этом примере точка 7 показывает, как этот усилитель можно использовать для увеличения сигнала в два раза. Наконец, есть фильтр нижних частот, который используется для устранения любого высокочастотного звонка или остаточного влияния несущей частоты.
Если кремний может быть подвергнут химической обработке и переработке в качестве преобразовательного элемента в пьезорезистивном акселерометре, он также должен быть подвергнут механической обработке и переработке в преобразовательный элемент емкостного акселерометра. Фактически, технология MEMS применима к емкостным акселерометрам. Рисунок 5.3.05 иллюстрирует
Рисунок 5.3.05. Пластины конденсатора MEMS и укомплектованный акселерометр без верхней крышки.
Элемент переменной емкости MEMS и его интеграция в акселерометр.Как и в случае с ранее описанным акселерометром с металлической диафрагмой, для обнаружения ускорения требуется пара емкостных элементов и изгиб.
Чувствительные элементы испытывают изменение емкости из-за незначительных отклонений, вызванных силой инерционного ускорения. Монокристаллическая природа кремния, отсутствие механических соединений и способность химически обрабатывать механические упоры приводят к созданию преобразователя с высокой пропускной способностью. Как и в предыдущем акселерометре с металлической диафрагмой, характеристики демпфирования могут быть улучшены в широком диапазоне температур, если в качестве демпфирующей среды используется газ, а не силиконовое масло.Серия канавок, соединенная с серией отверстий в центральной массе, выдавливает газ через конструкцию по мере смещения массы. Изменение термической вязкости газа мало по сравнению с силиконовым маслом. Емкостные акселерометры MEMS в настоящее время работают до сотен g и частот до одного кГц. Технология MEMS также приводит к уменьшению размеров акселерометра.
Большинство емкостных акселерометров содержат встроенную электронику, которая вводит сигнал в элемент, замыкает мост и формирует сигнал.Для большинства емкостных датчиков необходимо использовать только стандартный источник напряжения или батарею для подачи соответствующего питания на акселерометр.
Одним из основных преимуществ емкостных акселерометров является измерение ускорения низкого уровня (менее 2 g), низкой частоты (вплоть до постоянного тока) с возможностью выдерживать высокие уровни ударов, обычно 5000 g или более. Некоторыми из недостатков емкостного акселерометра являются ограниченный высокочастотный диапазон, относительно большой фазовый сдвиг и более высокий уровень шума, чем у сопоставимого пьезоэлектрического устройства.
8 Факторы окружающей среды, влияющие на точность измерения вибрации
В части 1 этой серии рассматриваются преимущества и недостатки различных датчиков вибрации; В части 2 были рассмотрены вопросы формирования сигнала, а также выбор и конфигурация аппаратного обеспечения системы. В заключение я расскажу о потенциальном влиянии различных факторов окружающей среды на точность измерения вибрации, а также сделаю краткий обзор анализа вибрации.
Факторы окружающей среды
Условия, в которых проводятся измерения вибрации, могут существенно повлиять на их точность:
Температура. Температура — самая серьезная проблема окружающей среды. Все датчики будут иметь некоторую температурную зависимость, особенно пьезоэлектрические акселерометры, поэтому для компенсации этих эффектов потребуется температурная компенсация. Хотя некоторые датчики имеют необходимое оборудование для компенсации, интегрированное в блок датчиков, для других может потребоваться добавить датчик температуры и выполнить компенсацию.
Базовые штаммы. Во многих пьезоэлектрических акселерометрах используется пьезоэлектрический элемент с наконечником, прикрепленным к основанию, и измеряющим сдвиг.Когда поверхность, на которой установлен акселерометр, испытывает деформацию, это часто может проявляться в данных как «ускорение». Хотя производители акселерометров проектируют свои датчики так, чтобы минимизировать этот эффект, базовые деформации все же могут приводить к ошибочным данным.
Акустический шум . Шум — это просто волны давления, которые могут возбуждать акселерометр и тестируемую конструкцию. Хотя эти индуцированные колебания обычно намного меньше реальных внутренних структурных колебаний, их следует учитывать.
Поперечные колебания . Акселерометры чувствительны к вибрациям, действующим в направлениях, перпендикулярных или ортогональных основной оси интереса. Эта поперечная чувствительность обычно составляет менее 5% для одноосных акселерометров; Трехосные акселерометры обычно имеют немного более высокую поперечную чувствительность.
Магнитные поля . Магнитная чувствительность акселерометров очень низкая, но этот эффект следует учитывать, особенно в экстремальных условиях, таких как военно-морские корабли.
Влажность . Хотя большинство акселерометров герметично закрыты для обеспечения надежной работы во влажной среде, влажность может вызвать проблемы при подключении кабелей. В особо влажных средах могут потребоваться предварительно подключенные специальные акселерометры для обеспечения точных данных. Регистраторам данных и виброметрам также могут потребоваться специальные корпуса или аксессуары для влажных сред.
Коррозионные вещества . Акселерометры или регистраторы данных с пластиковым корпусом могут быть восприимчивы к коррозионным агентам, поэтому не допускайте контакта этих веществ с оборудованием для сбора данных.
Удары и вибрации . Подумайте, что электроника сбора данных должна будет выдерживать во время использования. Электроника, которая хорошо подходит для использования в лаборатории, может не выдержать использования в полевых условиях. В полевых условиях может потребоваться прочная электроника и / или специальные аксессуары и корпуса для снижения уровней ударов и вибрации, которым будет подвергаться электроника.
Основы анализа вибрации
Сбор данных о вибрации — это только часть задачи измерения вибрации; другая часть — это анализ полученных данных.Важно понимать типы сигналов, связанных с анализом вибрации, важные различия между ними и то, когда целесообразно использовать каждый тип инструмента анализа вибрации. Однако в статье такого размера нереально пытаться глубоко исследовать эту тему. Чтобы лучше понять, как и когда использовать различные формы анализа вибрации, ознакомьтесь с ресурсами, перечисленными в конце статьи.
Анализ вибрации во временной области начинается с изменяющегося во времени реального сигнала от преобразователя или датчика.Анализ данных вибрации во временной области (амплитуда в зависимости от времени) ограничен несколькими параметрами при количественной оценке силы профиля вибрации: амплитудой, размахом и среднеквадратичным значением. Рисунок 1 представляет собой простую синусоидальную волну с указанными параметрами.
% {[data-embed-type = «image» data-embed-id = «5df27721f6d5f267ee2846f9» data-embed-element = «aside» data-embed-align = «left» data-embed-alt = «Www Machinedesign Com Сайты Machinedesign com Файлы измерения Vibfig1 «data-embed-src =» https: // base.imgix.net/files/base/ebm/machinedesign/image/2018/08/www_machinedesign_com_sites_machinedesign.com_files_MeasuringVibfig1.png?auto=format&fit=max&w=1440 «data-embed-caption =» «]}%
1. Простая синусоида с частотой 60 Гц с определенными амплитудой, размахом, среднеквадратичным значением, частотой и периодом.
- Пик или амплитуда ценны для ударных явлений, но не учитывают длительность и, следовательно, энергию события.
- То же самое верно для значения размаха до пика с дополнительным преимуществом обеспечения максимального отклонения волны, что полезно при просмотре информации о смещении, особенно зазоров.
- Значение RMS (среднеквадратичное значение) обычно является наиболее полезным, поскольку оно напрямую связано с содержанием энергии в профиле вибрации и, следовательно, с разрушительной способностью вибрации. RMS также учитывает временную историю формы волны.
Вибрация — это колебательное движение относительно равновесия, поэтому большинство анализов вибрации направлено на определение скорости этих колебаний или частоты, которая пропорциональна жесткости системы.Количество раз, когда полный цикл движения происходит в течение одной секунды, представляет собой частоту вибрации и измеряется в герцах (Гц). Для простых синусоидальных волн частоту вибрации можно определить, глядя на форму волны во временной области; однако, поскольку добавляются различные частотные компоненты и шум, для получения более четкой картины частоты вибрации необходим спектральный анализ.
Анализ вибрации в частотной области
Быстрое преобразование Фурье (БПФ) — это эффективный алгоритм, используемый для вычисления дискретного преобразования Фурье (ДПФ).Это преобразование Фурье выводит амплитуду вибрации как функцию частоты, чтобы анализатор мог понять, что вызывает вибрацию. Разрешение по частоте в БПФ прямо пропорционально длине сигнала и частоте дискретизации. Чтобы улучшить разрешение, необходимо увеличить время записи, но будьте осторожны с изменяющейся вибрационной средой.
Спектрограмма берет серию БПФ и перекрывает их, чтобы проиллюстрировать, как спектр (частотная область) изменяется со временем.Если анализ вибрации проводится в изменяющейся окружающей среде, спектрограмма может быть мощным инструментом, чтобы точно проиллюстрировать, как изменяется этот спектр вибрации.
Спектральная плотность мощности (PSD) принимает амплитуду БПФ, умножает ее на комплексное сопряжение и нормализует ее до ширины элемента разрешения по частоте. Это позволяет точно сравнивать случайные вибрационные сигналы с разной длиной сигнала. По этой причине PSD обычно используются для описания случайных вибрационных сред, подобных тем, которые указаны в военных и коммерческих стандартах испытаний.
Заключение
Очевидно, что в этой серии были затронуты только некоторые из основных моментов измерения вибрации. Чтобы узнать больше об инструментах и методах для более точных измерений вибрации, в том числе оптимизированных для проведения измерений в полевых условиях (рис. 2) , посетите веб-сайт Midé Technology.
% {[data-embed-type = «image» data-embed-id = «5df27721f6d5f267ee2846fb» data-embed-element = «aside» data-embed-align = «left» data-embed-alt = «Www Machinedesign Com Сайты Machinedesign com Файлы Meausring Vibration Рисунок 2 «data-embed-src =» https: // base.imgix.net/files/base/ebm/machinedesign/image/2018/08/www_machinedesign_com_sites_machinedesign.com_files_Meausring_Vibration_figure_2.png?auto=format&fit=max&w=1440 «data-embed-caption =» »
2. Регистраторы данных Slam Stick предназначены для измерения ускорения по всем трем осям при одновременном измерении температуры и давления. Прочные корпуса и широкий диапазон рабочих температур позволяют им работать в самых разных суровых условиях.
Хотите узнать больше?
Могут быть полезны следующие ресурсы по инструментам и методам анализа вибрации:
% {[data-embed-type = «image» data-embed-id = «5df2771ef6d5f267ee282abf» data-embed-element = «aside» data-embed-alt = «Www Machinedesign Com Sites Machinedesign com Источник файлов Esb Ищет запчасти Rev Caps «data-embed-src =» https: // base.imgix.net/files/base/ebm/machinedesign/image/2017/05/www_machinedesign_com_sites_machinedesign.com_files_SourceESB_Looking_for_partsREV_caps.png?auto=format&fit=max&w=1440} «data-embed0007».
