Как собрать полноприводный робот-автомобиль на Arduino с возможностью объезда препятствий. Какие компоненты потребуются для сборки. Как подключить датчики и моторы. Какой код использовать для управления роботом. Как расширить возможности робота-автомобиля.
Необходимые компоненты для сборки робота-автомобиля на Arduino
Для создания автономного робота-автомобиля на базе Arduino потребуются следующие основные компоненты:
- Плата Arduino Uno
- 4WD Robotic Car Kit (4 колеса, 4 двигателя постоянного тока, шасси, держатель батареи AA, винты)
- 6 батарей AA
- Ультразвуковой датчик расстояния HC-SR04
- Драйвер двигателей L298N
- Экран датчиков для Arduino
- Провода и перемычки различных типов
- USB-кабель для программирования Arduino
Кроме того, понадобится программное обеспечение Arduino IDE для загрузки кода на плату. Все компоненты легко доступны в магазинах электроники и на популярных торговых площадках.
Пошаговая сборка шасси робота-автомобиля
Сборка шасси робота-автомобиля состоит из следующих основных этапов:

- Соединение рамы автомобиля и крепление двигателей к колесам согласно инструкции к набору.
- Установка платы Arduino Uno на шасси с помощью винтов или двустороннего скотча.
- Крепление драйвера двигателей L298N рядом с платой Arduino.
- Установка держателя батарей AA на шасси.
- Монтаж ультразвукового датчика HC-SR04 на передней части шасси.
- Размещение экрана датчиков поверх платы Arduino Uno.
При сборке важно надежно закрепить все компоненты, чтобы они не болтались во время движения робота. Для крепления можно использовать винты, гайки, двусторонний скотч или термоклей.
Схема подключения компонентов робота-автомобиля
Правильное подключение всех компонентов критически важно для работоспособности робота. Основные соединения выполняются следующим образом:
- Питание от батарейного блока AA подключается к входам VCC и GND драйвера двигателей L298N.
- Двигатели подсоединяются попарно к выходам OUT1-OUT4 драйвера L298N.
- Управляющие входы драйвера IN1-IN4 и ENA/ENB соединяются с цифровыми выходами Arduino через экран датчиков.
- Ультразвуковой датчик HC-SR04 подключается к питанию и цифровым пинам Arduino через экран датчиков.
- Arduino получает питание 9В от отдельной батареи через разъем питания.
Все соединения выполняются проводами-перемычками различных типов в соответствии с детальной схемой подключения. Важно внимательно проверить все соединения перед подачей питания.

Программирование робота-автомобиля на Arduino
Для управления роботом-автомобилем используется код на языке Arduino C++. Основные функции программы:
- Инициализация пинов Arduino для управления двигателями и датчиком
- Функции для движения вперед, назад, поворотов и остановки
- Измерение расстояния до препятствий ультразвуковым датчиком
- Алгоритм объезда препятствий
- Основной цикл программы с логикой движения робота
Код загружается в Arduino с помощью Arduino IDE по USB-кабелю. После загрузки робот начинает автономное движение и объезд препятствий.
Алгоритм автономного движения и объезда препятствий
Базовый алгоритм автономного движения робота-автомобиля состоит из следующих шагов:
- Измерение расстояния до препятствий впереди ультразвуковым датчиком
- Если расстояние больше порогового (например, 20 см), движение вперед
- При обнаружении препятствия ближе порогового расстояния — остановка
- Поворот на случайный угол вправо или влево
- Повторное измерение расстояния и продолжение движения
Этот базовый алгоритм можно улучшать, добавляя более сложную логику оценки окружающей обстановки и выбора оптимального маршрута движения.

Возможности расширения функционала робота-автомобиля
Базовую конструкцию робота-автомобиля на Arduino можно существенно улучшить, добавив следующие компоненты и функции:
- Дополнительные ультразвуковые датчики по бокам и сзади для кругового обзора
- ИК-датчики для обнаружения краев поверхности и предотвращения падения
- Сервопривод для поворота ультразвукового датчика
- Модуль Bluetooth для дистанционного управления со смартфона
- GPS-модуль для определения координат и навигации
- Камера и система компьютерного зрения
- Манипулятор для взаимодействия с объектами
Добавление новых датчиков и исполнительных механизмов позволит сделать поведение робота более сложным и адаптивным к окружающей среде.
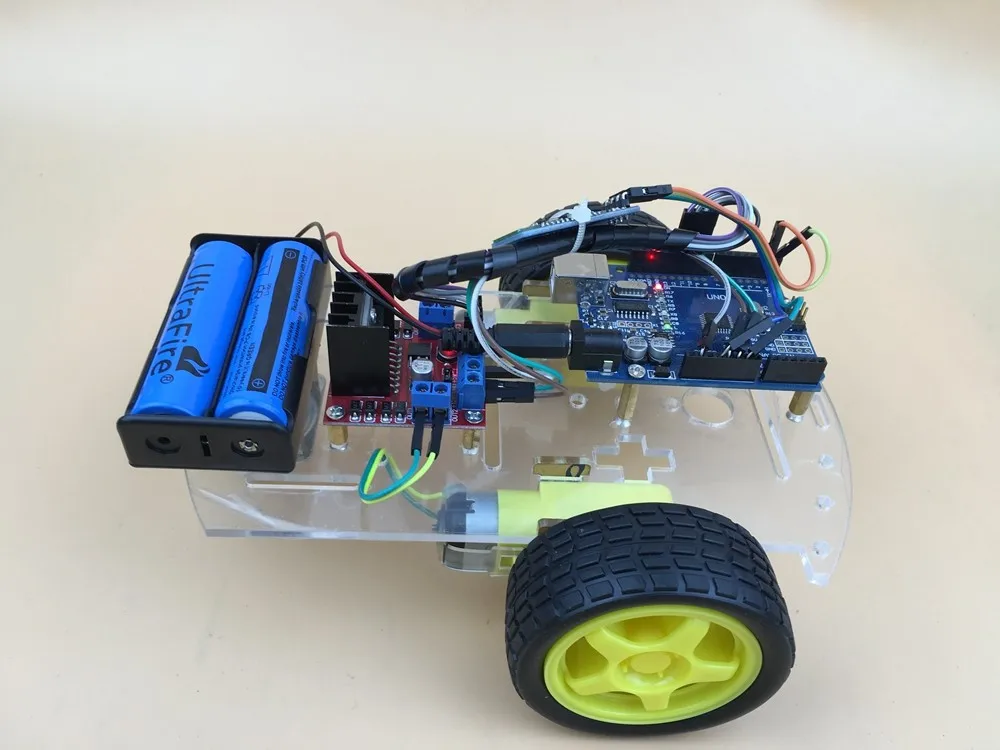
Питание робота-автомобиля: варианты и особенности
Правильный выбор источников питания критически важен для стабильной работы робота-автомобиля. Основные варианты питания:
- Батарейный блок AA для питания двигателей (6-8 батарей)
- Отдельная 9В батарея для питания Arduino
- Литий-полимерный аккумулятор подходящего напряжения
- Солнечная панель с контроллером заряда для автономной работы
При выборе источника питания нужно учитывать:
- Требуемое напряжение для Arduino и двигателей
- Потребляемый ток всей системы
- Время автономной работы
- Вес и габариты источника питания
Рекомендуется использовать отдельные источники для питания двигателей и электроники, чтобы избежать помех и просадок напряжения.
Настройка и калибровка робота-автомобиля
После сборки и программирования робота-автомобиля необходимо выполнить его настройку и калибровку:
- Проверка и регулировка положения колес для прямолинейного движения
- Калибровка ультразвукового датчика расстояния
- Настройка скорости вращения двигателей
- Подбор оптимальных параметров алгоритма объезда препятствий
- Тестирование работы всех узлов и систем робота
Правильная калибровка обеспечит точное движение робота и корректную работу всех его систем. Может потребоваться несколько итераций настройки для достижения оптимального результата.
Основы программирования Arduino для управления роботом
Для программирования робота-автомобиля на Arduino необходимо освоить следующие базовые концепции:
- Структура скетча Arduino: функции setup() и loop()
- Объявление и инициализация переменных и констант
- Управление цифровыми и аналоговыми пинами
- Использование ШИМ для управления скоростью двигателей
- Работа с последовательным портом для отладки
- Создание пользовательских функций
- Базовые алгоритмические конструкции: условия, циклы
Освоение этих основ позволит создавать более сложные алгоритмы управления роботом и добавлять новый функционал.
Отладка и устранение неисправностей робота-автомобиля
При разработке робота-автомобиля могут возникать различные проблемы. Основные шаги по их устранению:
- Проверка правильности всех электрических соединений
- Измерение напряжений в ключевых точках схемы
- Тестирование работы отдельных узлов (двигатели, датчики)
- Отладка программы с помощью вывода данных в Serial Monitor
- Пошаговое выполнение алгоритма для поиска логических ошибок
- Проверка качества пайки и механических соединений
Систематический подход к отладке позволит быстро выявить и устранить большинство возможных неисправностей робота-автомобиля.
Перспективы развития проекта робота-автомобиля
Проект автономного робота-автомобиля на Arduino имеет широкие возможности для дальнейшего развития:- Создание группы взаимодействующих роботов-автомобилей
- Добавление систем машинного обучения для адаптивного поведения
- Интеграция с облачными сервисами для удаленного мониторинга
- Разработка специализированных версий для конкретных задач
- Миниатюризация конструкции с использованием SMD-компонентов
- Создание собственной платы управления на базе микроконтроллера
Развитие проекта позволит получить ценный опыт в областях робототехники, электроники и программирования встраиваемых систем.
Создание пожарного мини-автомобиля на платформе Arduino
Цитировать:
Холматов О.О., Муталипов Ф.У. Создание пожарного мини-автомобиля на платформе Arduino // Universum: технические науки : электрон. научн. журн. 2021. 2(83). URL: https://7universum.com/ru/tech/archive/item/11307 (дата обращения: 11.03.2023).
Прочитать статью:
В этой статье рассмотрена проблема обнаружения пожара и его тушение. Тушение пожара огнетушителем – это опасная работа для человека, она часто ставит под угрозу жизнь этого человека. Данная работа направлена на техническое решение указанной проблемы. Робот — это механическая конструкция, которая способна автоматически выполнять сложную серию действий, особенно одну, программируемую компьютером. Робот-огнетушитель — это робот с тональным управлением DTMF, к которому добавлен небольшой огнетушитель. Этот мобильный робот управляется с помощью мобильного телефона с помощью сигналов DTMF для его движения и достижения огня, датчик пламени обнаруживает пожар и подает дополнительный сигнал на блоки пожаротушения, чтобы запустить насос и распылить воду. Вся система программируется с помощью платы Arduino UNO (микроконтроллер ATmega328P), которая формирует мозг системы.
Вся система программируется с помощью платы Arduino UNO (микроконтроллер ATmega328P), которая формирует мозг системы.
ABSTRACT
In this article, fire detection and extinguishing is a hazardous job for a fire extinguisher, it often endangers the life of that person. This project is aimed at a technical solution to this problem. A robot is a mechanical structure capable of automatically performing a complex series of actions, especially one programmed by a computer. The fire extinguisher robot is a DTMF tone controlled robot to which a small fire extinguisher is added. This mobile robot is controlled by a mobile phone using DTMF signals to move and reach the fire, the flame sensor detects the fire and sends an additional signal to the fire extinguishing units to start the pump and spray water. The entire system is programmed with the Arduino UNO board (ATmega328P microcontroller), which forms the brain of the system.
Ключевые слова: Технология DTMF, двигатели постоянного тока, датчик пламени, водяной насос, ARDUINO UNO.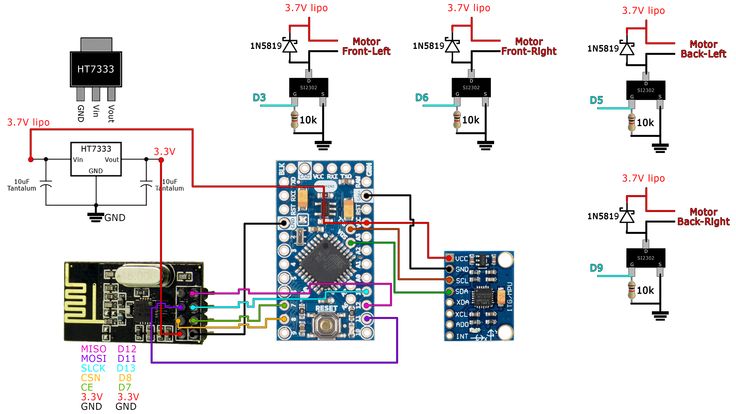
Keywords: DTMF technology, DC motors, flame sensor, water pump, ARDUINO UNO.
Введение.
Робот — это машина, похожая на человека и выполняющая различные сложные задачи. Существует много типов роботов, таких как робот со стационарной базой, мобильный робот, подводный робот, робот-гуманоид, космический робот, медицинский робот и т. Д. В этой статье предлагается РОБОТ ПОЖАРОТУШЕНИЯ [1]. Этот робот оснащен одним датчиком пламени, который используется для обнаружения возгорания в окружающей среде и подачи сигналов на микроконтроллер, чтобы запустить насос, который разбрызгивает воду для тушения пожара. Этот робот управляется с помощью мобильного телефона с помощью сигналов DTMF, декодируемых декодером DTMF[2].
Цель исследования
Этот робот реализует концепции экологического пожарного зондирования, пропорционального управления двигателем. Драйвер двигателя используется для двунаправленного управления двигателями, установленными в роботе.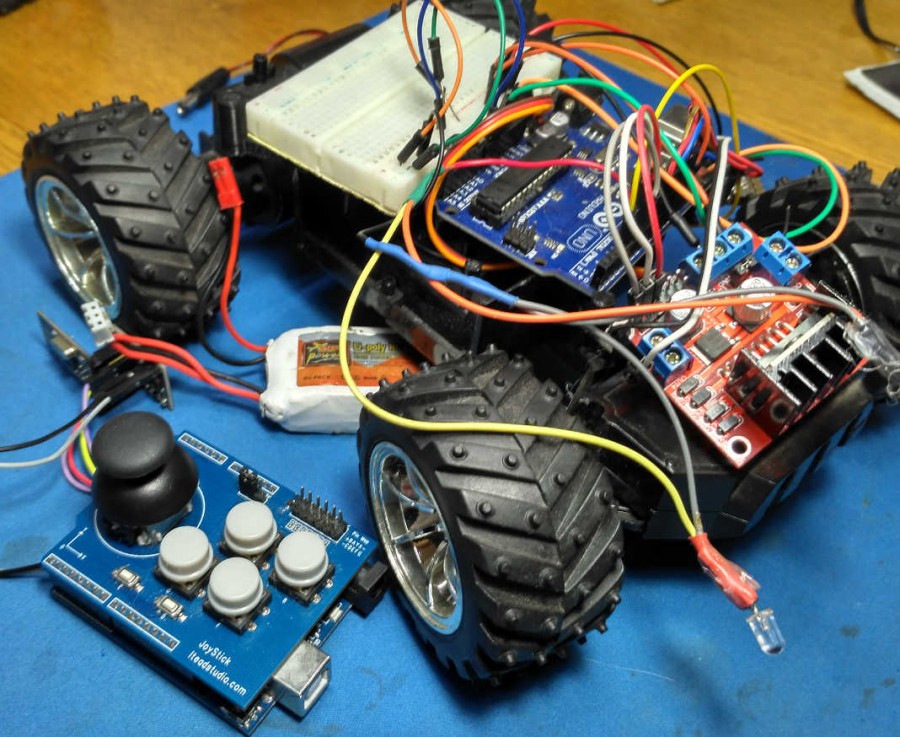 Каждая инструкция по управлению движением передается роботу с помощью технологии DTMF. Таким образом, робот обрабатывает информацию от различных ключевых аппаратных элементов, таких как датчик пламени, декодер DTMF через плату Arduino Uno (микроконтроллер) [2]. Программирование робота осуществляется с использованием Arduino C, который является производным от языков C и C++. Эта статья представлена следующим образом. Предлагаемая методология в разделе II, который состоит из блок-схемы, компонентов и их объяснения. Детали аппаратного и программного обеспечения включены в раздел III. В Раздел IV включены результаты и выводы [3].
Каждая инструкция по управлению движением передается роботу с помощью технологии DTMF. Таким образом, робот обрабатывает информацию от различных ключевых аппаратных элементов, таких как датчик пламени, декодер DTMF через плату Arduino Uno (микроконтроллер) [2]. Программирование робота осуществляется с использованием Arduino C, который является производным от языков C и C++. Эта статья представлена следующим образом. Предлагаемая методология в разделе II, который состоит из блок-схемы, компонентов и их объяснения. Детали аппаратного и программного обеспечения включены в раздел III. В Раздел IV включены результаты и выводы [3].
Методы.
На рис.1 показана блок-схема пожарного робота. Основная тема этой статьи — почувствовать экологический пожар и потушить его с помощью водяного насоса. Плата микроконтроллера Arduino UNO на базе ATmega328P. ATmega328P — хорошая платформа для приложений робототехники. Таким образом, можно проводить тушение пожара в реальном времени [2].
Рисунок 1. Блок-схема пожарного робота
Программное обеспечение Arduino работает на разных платформах, таких как Mac, Windows и Linux. В случае программного обеспечения Arduino возможно простое и понятное программирование. Библиотеки Arduino играют важную роль в упрощении программирования, предоставляя более широкий спектр библиотек. В программном обеспечении Arduino доступно множество встроенных библиотек, что позволяет добавлять дополнительные библиотеки, доступные для загрузки в открытом исходном коде. Возможно добавление новых плат в программное обеспечение Arduino. Поскольку Arduino C является производным от программирования C и C ++ и намного проще по сравнению с программированием других контроллеров [5].
Рисунок 2. Полная принципиальная схема этого пожарного робота приведена ниже
Микроконтроллер, в свою очередь, управляет системой пожаротушения. Рабочее напряжение контроллера составляет 5 В, тактовая частота — 16 МГц, а рекомендуемое входное напряжение — 7–12 В, а ограничение входного напряжения составляет 6–20 В. Двухтональная многоканальная сигнализация (DTMF) — это внутриполосная телекоммуникационная система сигнализации, которая использует полосу тональных частот по телефонным линиям между телефонным оборудованием и другими устройствами связи и центрами коммутации. Здесь используется IC MT8870DE, микросхема декодера тонального набора. Основная цель этого проекта — разработать робота для пожаротушения, управляемого DTMF, который обнаруживает место пожара и тушит пожар с помощью спринклеров при запуске насоса [5]. Направление движения робота описывается платой водителя мотора. Он используется для подачи высокого напряжения, а большой ток выдается в качестве выхода для запуска двигателей, которые используются в проекте для движения робота. В этом проекте используется простой двигатель постоянного тока для вращения колеса, которое отвечает за движение робота.
Рабочее напряжение контроллера составляет 5 В, тактовая частота — 16 МГц, а рекомендуемое входное напряжение — 7–12 В, а ограничение входного напряжения составляет 6–20 В. Двухтональная многоканальная сигнализация (DTMF) — это внутриполосная телекоммуникационная система сигнализации, которая использует полосу тональных частот по телефонным линиям между телефонным оборудованием и другими устройствами связи и центрами коммутации. Здесь используется IC MT8870DE, микросхема декодера тонального набора. Основная цель этого проекта — разработать робота для пожаротушения, управляемого DTMF, который обнаруживает место пожара и тушит пожар с помощью спринклеров при запуске насоса [5]. Направление движения робота описывается платой водителя мотора. Он используется для подачи высокого напряжения, а большой ток выдается в качестве выхода для запуска двигателей, которые используются в проекте для движения робота. В этом проекте используется простой двигатель постоянного тока для вращения колеса, которое отвечает за движение робота. Двигатели постоянного тока обычно преобразуют электрическую энергию в механическую. Для тушения огня используется насос, нагнетающий воду в пламя. Для перекачки воды используется простой мотор. Насосный двигатель в системе пожаротушения контролирует поток воды, выходящей из откачки [5].
Двигатели постоянного тока обычно преобразуют электрическую энергию в механическую. Для тушения огня используется насос, нагнетающий воду в пламя. Для перекачки воды используется простой мотор. Насосный двигатель в системе пожаротушения контролирует поток воды, выходящей из откачки [5].
Рисунок 3. Внешний вид разработки
Результаты и обсуждение.
Микроконтроллер ATmega328P (Arduino UNO):
Рисунок 4. Разработка на базе микроконтроллера Arduino Uno. Доска
На рис. 4 показана плата Arduino Uno. Arduino / Genuino Uno — это плата микроконтроллера на базе ATmega328P. Он имеет 14 цифровых входных / выходных контактов (из которых 6 могут использоваться как выходы PWM), 6 аналоговых входов, кварцевый кристалл 16 МГц, USB-соединение, разъем питания, разъем ICSP и кнопку сброса. Он содержит все необходимое для поддержки микроконтроллера [6].
Датчики пламени:
Рисунок 5. Датчик пламени
На рис. 5 показан датчик пламени. Этот датчик может обнаруживать пламя, считывая световые волны с длиной волны от 760 до 1100 нанометров. Расстояние испытания зависит от размера пламени и настроек чувствительности. Угол обнаружения составляет 60 градусов, поэтому пламя не обязательно должно находиться прямо перед датчиком [6].
Есть два выхода датчиков:
- Цифровой — отправка либо нуля, если ничего не обнаружено, либо единицы при положительном обнаружении.
- Аналоговый — отправка значений в диапазоне, представляющем вероятность / размер / расстояние пламени; должен быть подключен к входу с поддержкой ШИМ.
Заключение
Робот пожаротушения использует технологию DTMF для управления направлениями робота. Мы проектируем систему обнаружения пожара с использованием датчика пламени, способного обнаруживать пламя в диапазоне длин волн от 760 до 1100 нм, а диапазон обнаружения зависит от чувствительности и варьируется от 10 см до 1,5 футов. Робот может работать в среде, недоступной для человека, за очень короткое время, задержка очень минимальна. Робот точно и эффективно обнаруживает возгорание и за минимальное время после его обнаружения тушит.
Робот может работать в среде, недоступной для человека, за очень короткое время, задержка очень минимальна. Робот точно и эффективно обнаруживает возгорание и за минимальное время после его обнаружения тушит.
Список литературы:
- ARDUINO Workshop by John Boxall . –2013.
- ARDUINO Cookbook, Second Edition by Michael Margolis 2012
- Bantsi Massimo ARDUINO dlya nachinayuschikh volshebnikov M 2012 128s
- М. С. Голубцов Микроконтроллеры AVR: от простого к сложному / М. С. Голубцов — М.: СОЛОН-Пресс, 2003. 288 с. — (Серия «Библиотека инженера»)
- Электронный ресурс http://213.159.213.14/ru/tech/archive/item/11068 (дата обращения 01.02.2021)
- Электронный ресурс https://www.researchgate.net/publication/317610964_Fire_Extinguishing_Robot (дата обращения 01.02.2021)
- Электронный ресурс http://nostarch.com/ARDUINO/ (дата обращения 01.02.2021)
- Электронный ресурс http://fritzing.
 org/ (дата обращения 01.02.2021)
org/ (дата обращения 01.02.2021)
Подключение (питание) Ардуино (Arduino) к бортовой сети автомобиля | Livecage
Наши автомобили давно уже стали не просто средством передвижения, а целым комплексным решением сложных и порой высокопроизводительных систем имеющих косвенное отношение к передвижению. Это и мультимедиа отвечающие за развлечения и комфорт в салоне, и устройства улучшающие визуализацию сигнальных световых огней, и устройства воспроизводящие различные звуковые информационные сигналы, и датчики, а также другие опции.
Таким образом, мы прежде хотим охарактеризовать и упомянуть микроконтроллеры и микроэлектронные устройства работающих на наше благо. При этом такие устройства могут добавляться в наш автомобиль по мере наших пожеланий и возможностей. Одним из таких устройств, своеобразных игрушек и помощников стала Ардуино.
Вначале давайте о том, что такое Ардиуино, ведь наверное еще не все знают к чему такая вещь в автомобиле. Надо сказать, без какой-то доли иронии, что это практически готовое функциональное устройство, которое можно настроить путем заливки в нее программы и тем самым заложить определенные полезные функции.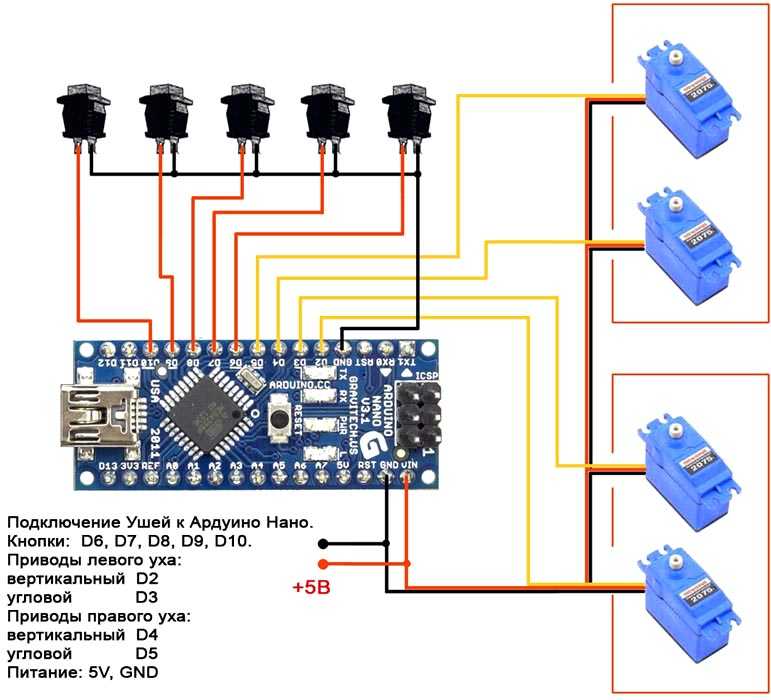 Скажем мигающий стоп-сигнал по вашему алгоритму или ленивый поворотник или обеспечить индикацию и воспроизведение (звук, свет) срабатывания датчиков. Да нам фантазии не хватит перечислить все то, что можно сделать с этим девайсом. Если кратко, то вы задаете какие-то условия для реализации определенных действий, а вот мозгами обеспечивающими такую работу будет Ардуино. Так что если у вас есть логические задачи, которые вы хотели бы решать в автомобиле, то доверьте это все вашему маленькому помощнику. Однако, как и все ассистенты, так и наш Ардуино хочет кушать. А питается он электричеством от бортовой сети автомобиля. При этом логика Ардуино работает от 5 и 3,3 вольт. Конечно, штатно в Ардуино стоит стабилизатор напряжения, но его может не хватить для того, чтобы обеспечить должную мощность для питания. Именно поэтому следующий абзац как раз и будет посвящен снижению напряжения для подключения Ардуино.
Скажем мигающий стоп-сигнал по вашему алгоритму или ленивый поворотник или обеспечить индикацию и воспроизведение (звук, свет) срабатывания датчиков. Да нам фантазии не хватит перечислить все то, что можно сделать с этим девайсом. Если кратко, то вы задаете какие-то условия для реализации определенных действий, а вот мозгами обеспечивающими такую работу будет Ардуино. Так что если у вас есть логические задачи, которые вы хотели бы решать в автомобиле, то доверьте это все вашему маленькому помощнику. Однако, как и все ассистенты, так и наш Ардуино хочет кушать. А питается он электричеством от бортовой сети автомобиля. При этом логика Ардуино работает от 5 и 3,3 вольт. Конечно, штатно в Ардуино стоит стабилизатор напряжения, но его может не хватить для того, чтобы обеспечить должную мощность для питания. Именно поэтому следующий абзац как раз и будет посвящен снижению напряжения для подключения Ардуино.
Итак, теперь о самом главном, о чем собственно и была написана наша статья. Да, конечно, можно было бы просто направить читателя на страничку «Как преобразовать 12 вольт в 5 вольт на машине», да и забыть про все… Однако раз уж мы взвалили этот груз на свои плечи, то давайте продолжим все же в тематическом ключе.
Если взглянуть в технические характеристики Ардуино то можно найти информацию о том, что Ардуино UNO питается от 9 вольт. На самом деле такое завышенное напряжение вполне оправдано, ведь если подать на Ардуино сразу 5 вольт, то его может не хватить. Все дело в том, что на плате у Ардуино есть свои стабилизаторы напряжения, а они тоже имеют какой-то КПД. В итоге если подать номинальное рабочее напряжение, то после них оно будет уже ниже номинального из-за собственного сопротивления стабилизаторов. Опять же если подать 12-14 вольт, то этого будет уже многовато. Ведь стабилизаторы, как правило, выполнены в корпусе SOT-223, а в таком корпусе рассеиваемая мощность у стабилизаторов 1117 серии всего-то 0,8 Вт. Давайте прикинем. Если подключить нагрузку эквивалентную 8-10 светодиодам, то это будет порядка 100 мА. В итоге на штатных стабилизаторах упадет от 7 до 9 вольт. Получается 0,1*9=0,9 Вт. То есть в этом случае микросхема – стабилизатор уже потребует радиатора, которого априори нет в Ардуино. Вот ту мы и приходим к выводу об оптимальном питании в 7-9 вольт. А дальше Ардуино сама из этого напряжения получит то, что ей надо. Теперь о том, как получить такое напряжение.
Вот ту мы и приходим к выводу об оптимальном питании в 7-9 вольт. А дальше Ардуино сама из этого напряжения получит то, что ей надо. Теперь о том, как получить такое напряжение.
Начнем мы с абсурдного, но быть может с того, что кому-то может прийти в голову! При питании Ардуино сразу отказываемся от сопротивлений подключенных последовательно и снижающих напряжение. При этом не важно, что они мощные и способны рассеивать нужную мощность. Все дело в том что Ардуино может в разные промежутки времени потреблять разную мощность, а значит токоограничивающее сопротивление должно изменяться, что невозможно при обычном статическом, так его назовем, сопротивлении!
Итак, мы должны иметь динамически изменяющуюся составляющую в питании микроконтроллера. Здесь самое время обратиться к микросхемам – стабилизаторам. Скажем LM7809, 7808 способны выдавать ток до 1,5 А и снижать напряжение. Давайте и здесь прикинем. 14-9=5. 5 вольт надо погасить стабилизатору. Пусть потребляемый ток 150 мА. В итоге 0,15*5=0,75 Вт надо рассеять будет на корпусе ТО-220. Ну что сказать, все вполне жизненно и реально. Часть тепла рассеется на внешнем стабилизаторе, а часть на штатном. Опять же повторимся, что не следует брать 7805, так как это будет слишком низкое питание для Ардуино, да к тому же еще и рассеиваемая мощность на таком стабилизаторе подлетит в два раза, то есть надо будет наверняка ставить радиатор.
Ну что сказать, все вполне жизненно и реально. Часть тепла рассеется на внешнем стабилизаторе, а часть на штатном. Опять же повторимся, что не следует брать 7805, так как это будет слишком низкое питание для Ардуино, да к тому же еще и рассеиваемая мощность на таком стабилизаторе подлетит в два раза, то есть надо будет наверняка ставить радиатор.
Ну, и если шагать в ногу со временем, то быть может стоит обратить внимание на ШИМ питание. Широко импульсная модуляция это когда напряжение выдается на нагрузку не постоянно, а импульсами. При этом на нагрузке как бы остается среднее значение от суммарного значения импульсов. В конце концов перерывы между этими импульсами позволяют сэкономить на энергозатратах при питании и не требуют элементов для рассеивания тепла – радиаторов. Единственное ШИМ несколько дороже чем просто микросхемы-стабилизаторы, да и собирать своими руками такую схему вряд ли кто станет. Проще купить готовый блок, но повторимся это более прогрессивно.
Комментарии запрещены.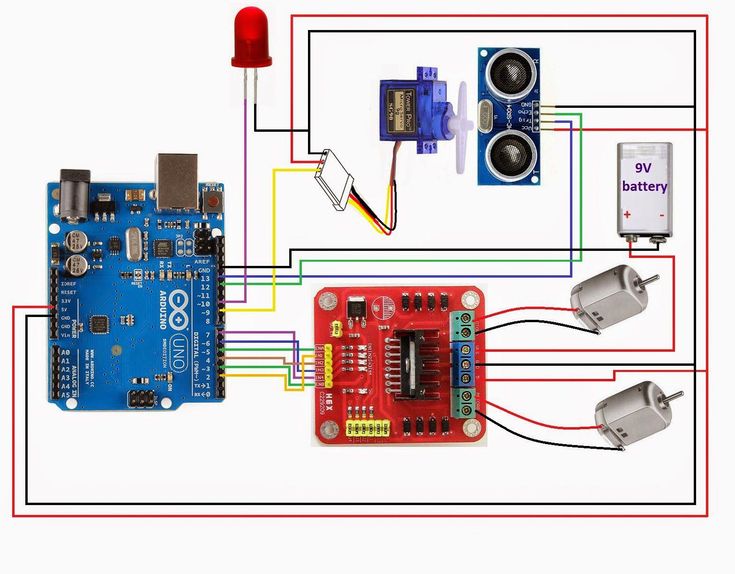
Создайте полноприводный автономный автомобиль с помощью Arduino — codemahal
Учебники по Arduino Uno
🕑 Этот урок займет около 45 минут
В этом уроке вы научитесь делать полноприводную машину с возможностью обхода препятствий. Этот проект включает в себя создание полноприводного автомобиля с Arduino и ультразвуковым датчиком, который может обнаруживать близлежащие объекты и изменять свое направление, чтобы избежать этих объектов. Вы также можете расширить этот проект с помощью серводвигателя, который перемещает ультразвуковой датчик влево и вправо для лучшего «видения» препятствий, окружающих автомобиль.
Вы можете расширить этот проект, добавив дополнительные датчики, такие как ультразвуковой датчик сзади, чтобы автомобиль не сталкивался с объектами, датчики определения скорости для измерения скорости, датчики движения по линии, а также светодиодные стоп-сигналы и фары. Вы даже можете добавить датчики света и светодиоды для включения фар в условиях низкой освещенности или модуль Bluetooth для удаленного управления автомобилем с помощью приложения для смартфона.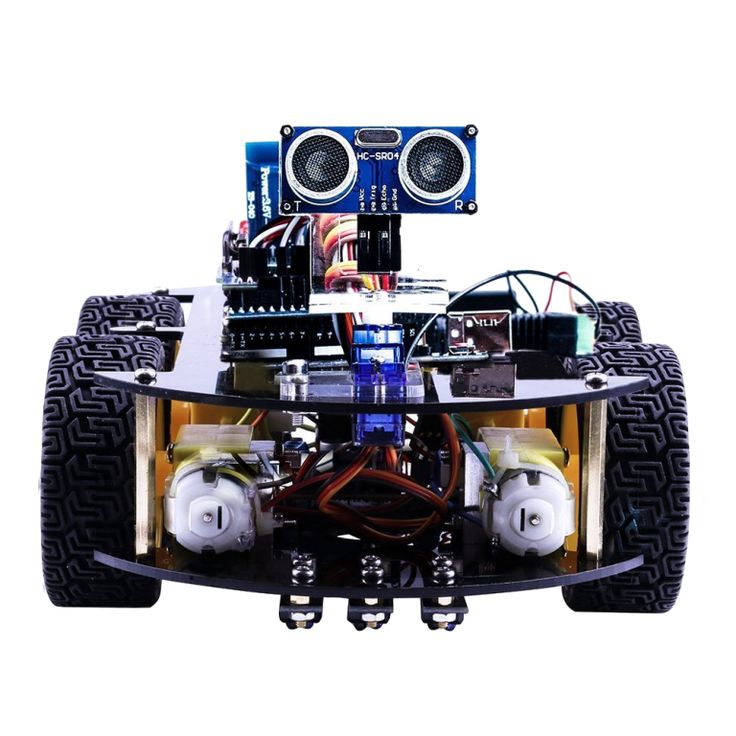
Необходимые детали
Вот что вам понадобится:
-
1 x плата Arduino Uno
-
1 x 4WD Robotic Car Kit (4 колеса, 4 двигателя постоянного тока, шасси, держатель батареи AA, винты)
-
6 батарей AA
9 x 1 -
1 x 9 В. Разъем кабельного ствола батареи.0002 Провода:
-
4 провода-перемычки типа «мама-мама» для ультразвукового датчика
-
8 проводов-перемычек типа «мама-мама» для модуля двигателя и экрана датчика
-
8 проводов с неизолированными концами от четырех двигателей к модулю двигателя
-
2 провода с неизолированными концами для перехода от модуля двигателя к экрану датчика
-
-
Программное обеспечение Arduino IDE (бесплатная загрузка на http://www.arduino.cc )
1x USB-кабель (штекер A на штекер B)
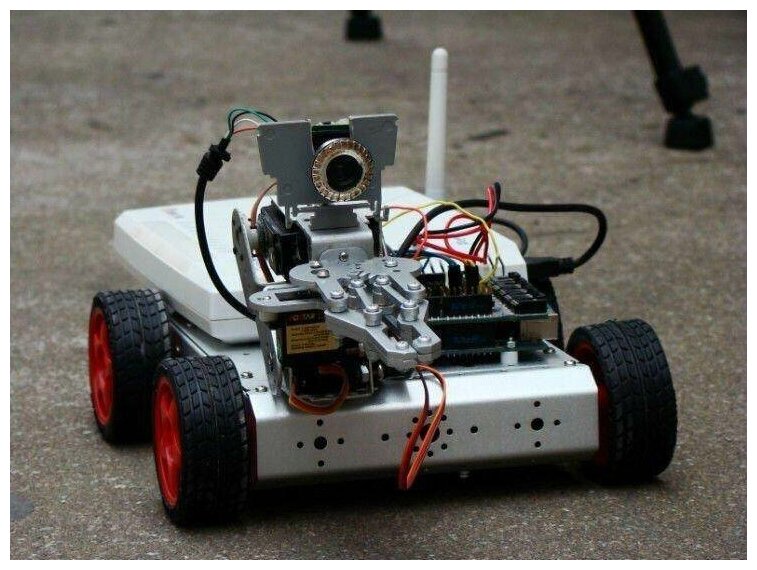
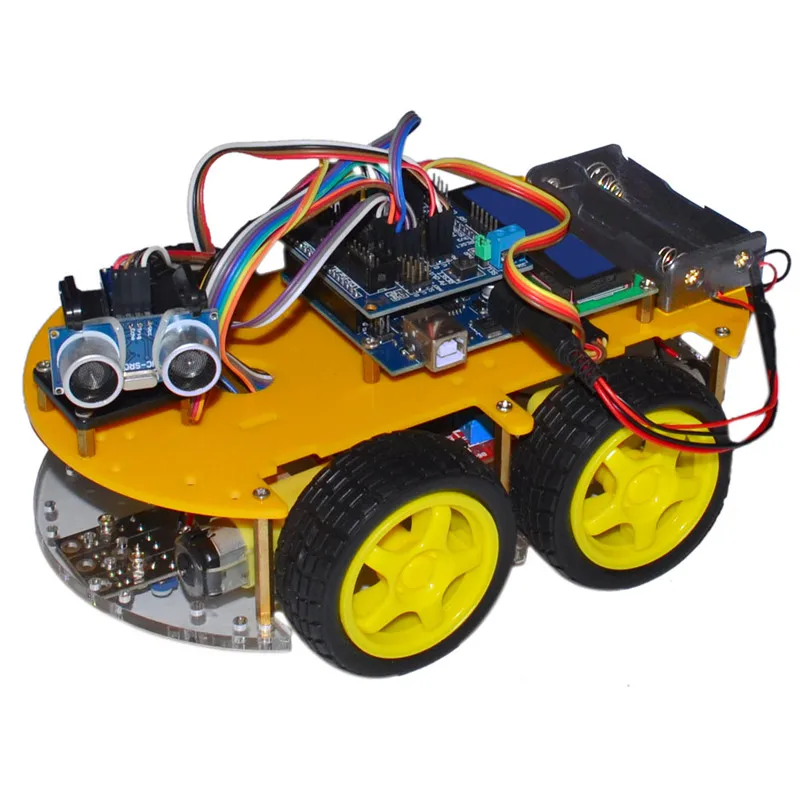
Ниже приведены изображения основных компонентов, которые вам нужны (кроме проводки и аккумуляторов) — различных деталей автомобиля, экранов, модулей и датчиков.
Сборка автомобиля
Первое, что нужно сделать, это собрать раму автомобиля и прикрепить моторы к колесам. После того, как автомобиль собран, вам нужно будет подключить различные компоненты. Следуйте этим инструкциям и обратитесь к схеме ниже, чтобы подключить различные компоненты в автомобиле.
-
Подсоедините красный провод (напряжение) от батарейного отсека AA к VCC на модуле двигателя L298N.
-
Подсоедините черный провод (заземление) от батарейного отсека AA к GND на модуле двигателя L298N.
-
Подсоедините красный провод от двигателя A1 (задний левый) и красный провод от двигателя A2 (передний левый) к OUT1 на модуле двигателя (оба провода можно скрутить вместе и подключить к OUT1 — схема ). далее на этой странице показывает, как это сделать).
-
Подсоедините черный провод от двигателя A1 (сзади слева) и черный провод от двигателя A2 (спереди слева) к OUT2 на модуле двигателя.
-
Подсоедините красный провод от двигателя B1 (сзади справа) и красный провод от двигателя B2 (спереди справа) к OUT3 на модуле двигателя.
-
Соедините черный провод от двигателя B1 (сзади справа) и черный провод от двигателя B2 (спереди справа) до OUT4 на модуле двигателя.
-
Подсоедините провод-перемычку типа «мама-мама» от ENA (двигатель A) на модуле двигателя к сигнальному контакту (S) 1 на экране датчика (контакт № 2 в ряду S). три ряда — S означает сигнал, V — напряжение и G — заземление).
-
Подсоедините провод-перемычку типа «мама-мама» от 5 В (рядом с ENA) на модуле двигателя к контакту напряжения (V) 1 на экране датчика (на самом деле не имеет значения, какой контакт соответствует напряжению, если как в V ряду).
-
Подсоедините перемычку типа «мама-мама» от IN1 на модуле двигателя к сигнальному контакту 2 на экране датчика.
-
Подсоедините перемычку типа «мама-мама» от IN2 на модуле двигателя к сигнальному контакту 3 на экране датчика.
-
Подсоедините перемычку типа «мама-мама» от IN3 на модуле двигателя к сигнальному контакту 4 на экране датчика.
Подсоедините перемычку типа «мама-мама» от IN4 на модуле двигателя к сигнальному контакту 5 на экране сенсора.
-
Подсоедините провод-перемычку типа «мама-мама» от 5V (рядом с ENB) на модуле двигателя к контакту напряжения (V) 6 на экране датчика (на самом деле не имеет значения, какой контакт для напряжения пока он находится в V ряду).
-
Подсоедините концевой провод «мама-мама» от ENB (двигатель B) на модуле двигателя к сигнальному (S) контакту 9.0013 6 на сенсорном щитке.
-
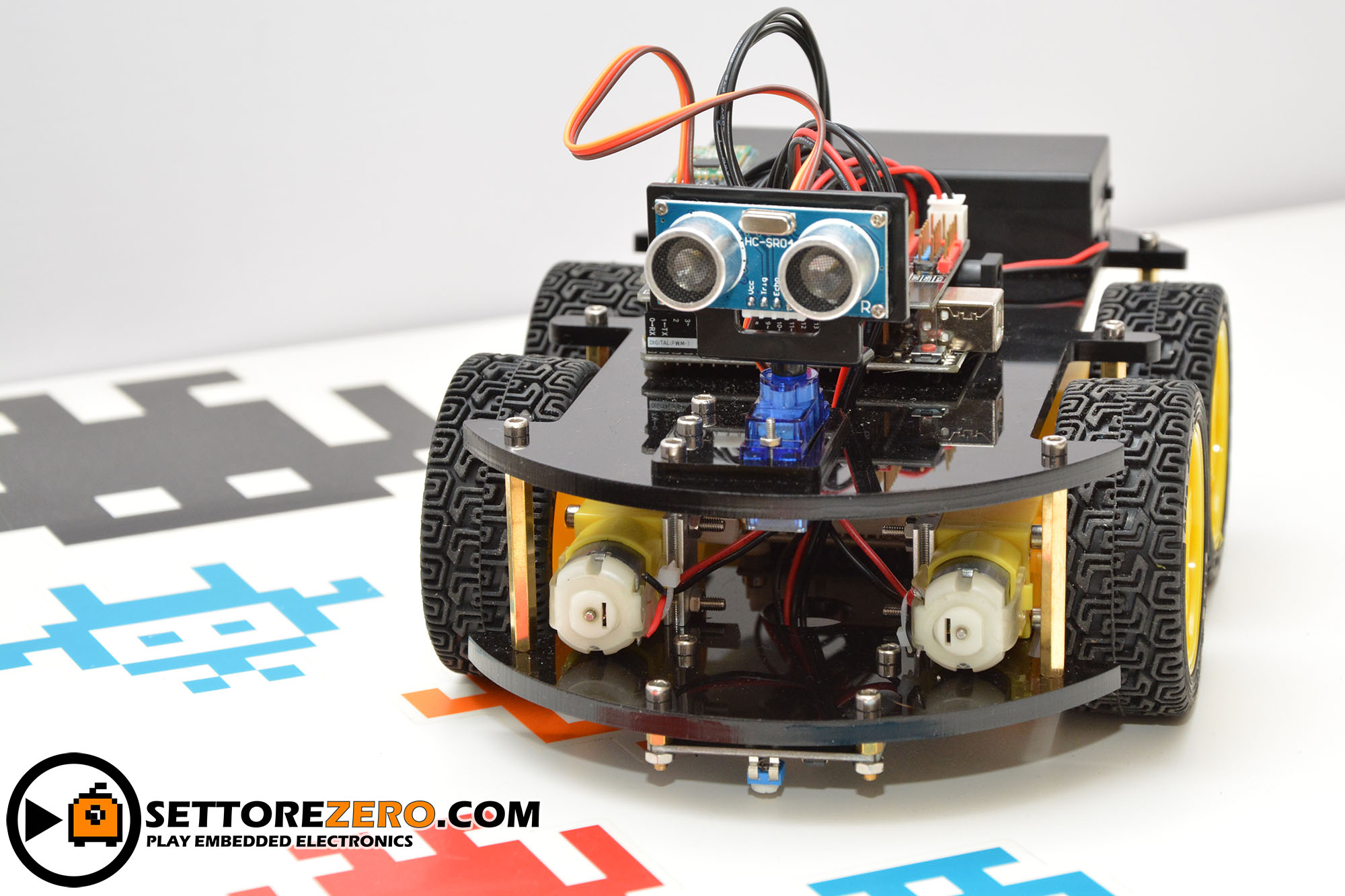
Прикрепите ультразвуковой датчик к передней части автомобиля так, чтобы датчик был направлен вперед для обнаружения объектов перед автомобилем.
 Вы можете использовать пистолет для горячего клея, ленту, клейкую ленту или 3D-печатное/лазерное крепление, чтобы прикрепить датчик и убедиться, что он надежно закреплен. Убедитесь, что он не слишком близко к земле, так как датчик может случайно определить землю как объект, которого следует избегать.
Вы можете использовать пистолет для горячего клея, ленту, клейкую ленту или 3D-печатное/лазерное крепление, чтобы прикрепить датчик и убедиться, что он надежно закреплен. Убедитесь, что он не слишком близко к земле, так как датчик может случайно определить землю как объект, которого следует избегать. -
Используйте перемычки типа «мама-мама» для подключения ультразвукового датчика к защитному экрану датчика. Во-первых, прикрепите Контакт TRIG от ультразвукового датчика к сигнальному (S) контакту 8 на защитном кожухе датчика. Подсоедините контакт ECHO ультразвукового датчика к сигнальному контакту (S) 9 на защитном кожухе датчика. Подсоедините контакт VCC ультразвукового датчика к контакту напряжения (V) 10 на защитном экране датчика. Наконец, прикрепите контакт GND ультразвукового датчика к контакту GND (G) 11 на защитном кожухе датчика.
-
Теперь поместите защитный экран датчика поверх платы Arduino Uno, следя за тем, чтобы не погнуть и не повредить контакты, когда они вставляются в разъемы для контактов Arduino. Подключить 9V Battery Barrel Jack Соедините 9-вольтовую батарею, а затем подключите ее к порту питания Arduino (см. схему ниже).
-
Вот и все! Теперь все, что вам нужно, это батарейки и загрузить код!
Обратите внимание: Существует несколько вариантов датчиков и модулей и несколько различных способов их подключения. Например, вы можете добавить зарядный компонент для зарядки аккумуляторов, а также добавить различные переключатели. Могут быть и другие лучшие методы, но я выбрал самый простой из известных мне способов настроить это.
Код
Вот код, чтобы заставить вашего робота двигаться. Загрузите следующий код в Arduino с помощью программного обеспечения Arduino IDE. Этот код заставит автомобиль двигаться вперед и объезжать препятствия, обнаруженные ультразвуковым датчиком. Вы можете изменить этот код, чтобы использовать больше датчиков или дистанционно управлять с помощью приложения для смартфона, подключенного к Arduino через Bluetooth.
Вы можете изменить этот код, чтобы использовать больше датчиков или дистанционно управлять с помощью приложения для смартфона, подключенного к Arduino через Bluetooth.
Дистанционное управление с Bluetooth
Вместо использования ультразвукового датчика для автономного управления автомобилем вы можете использовать модуль Bluetooth для удаленного управления автомобилем по беспроводной сети с помощью смартфона. Вы можете изменить этот код, чтобы получать строковые команды из приложения через Bluetooth-соединение — используйте Serial Monitor, чтобы проверить, какие команды получены, и измените код, чтобы, например, при получении команды «вперед» автомобиль двигался вперед. . В iOS App Store и Google Play Store доступно несколько приложений для управления автомобилем Arduino через Bluetooth. Вы можете загрузить приложение LearnThruTech RC CarController для подключения к модулю Bluetooth и отправки строковых команд на Arduino, чтобы заставить автомобиль двигаться вперед, назад, влево или вправо.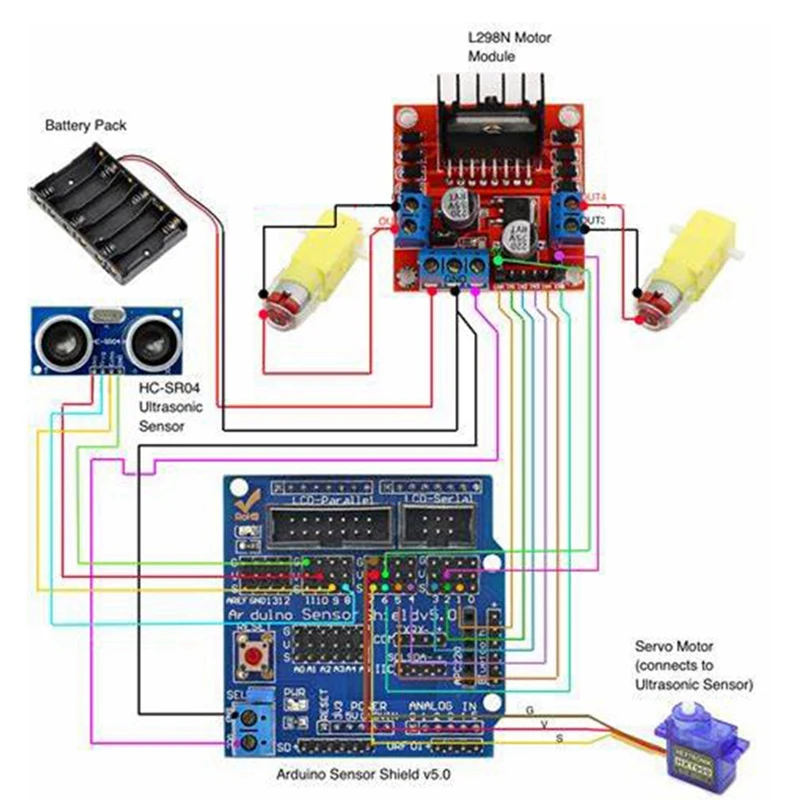 Попробуйте!
Попробуйте!
Базовый автомобильный транспорт
Плата OSOYOO Magic I/O Shield для Arduino — мощная плата для начинающих. С помощью этой платы Magic мы можем легко подключать различные датчики и исполнительные механизмы, что намного проще, чем раньше. Кроме того, эта плата расширения имеет встроенный чип драйвера двигателя, который позволяет нам управлять движением двух пар электродвигателей.
В этом уроке мы покажем, как собрать простую машину-робот и использовать Mixly для программирования ее движения.
- Экран ввода-вывода OSOYOO Magic для Arduino
- Доска OSOYOO UNO
- Колеса
- Акриловое шасси
- Блок двигателя
- 3-контактный PNP-кабель OSOYOO
- 4-контактный PNP-кабель OSOYOO
- USB-кабель
- ПК
Примечание:
Для этого урока нужно немногое. Убедитесь, что у вас есть кабель синхронизации хорошего качества, не выбирайте USB-кабель «только для зарядки».
Убедитесь, что у вас есть кабель синхронизации хорошего качества, не выбирайте USB-кабель «только для зарядки».
1. Снимите защитную пленку с шасси, затем установите двигатель под шасси с помощью винтов M3, гаек и резиновых колец следующим образом: (Пожалуйста, установите резиновые кольца на шасси)
2. Установите универсальное колесо с помощью винтов M3, медных опор и резиновых колец:
3. Установите универсальное колесо под шасси с помощью винтов M3:
4. Установите плату OSOYOO UNO с помощью пластиковых винтов M3 и опор:
5. Установите плату OSOYOO UNO на шасси с помощью пластиковых винтов M3:
6. Подключите OSOYOO Magic I/O Shield v1.1 к плате OSOYOO UNO, как показано на рисунке:
7. Установите колеса:
8. Установите аккумуляторный ящик на шасси с помощью винтов и гаек M2:
9. Соедините компоненты:
Левый мотор – L1
Правый мотор – R1
5 D12 //K1、K2 направление двигателя
IN2 —D11 //K1、K2 направление двигателя
IN3 —D9 //K3、K4 направление двигателя
IN4 —D10 //K3、K4 направление двигателя
ENA —D5 // Должен быть вывод PWM для возможности управления скорость двигателя ENA
ENB —D6 // Для управления скоростью двигателя необходим вывод ШИМ Ардуино.

