Какие бывают двигатели для Arduino. Как выбрать подходящий двигатель для проекта. В чем особенности серводвигателей, двигателей постоянного тока, шаговых и бесколлекторных двигателей. Какие преимущества и недостатки у разных типов двигателей для Arduino.
Виды двигателей для Arduino
При создании проектов на Arduino часто требуется использовать различные двигатели. Существует несколько основных типов двигателей, которые применяются с Arduino:
- Серводвигатели
- Двигатели постоянного тока
- Шаговые двигатели
- Бесколлекторные двигатели
Каждый тип имеет свои особенности, преимущества и недостатки. Рассмотрим их подробнее.
Серводвигатели для Arduino
Серводвигатели являются одними из самых популярных двигателей для проектов Arduino. Они представляют собой компактные моторы с встроенной платой управления и датчиком положения.
Особенности серводвигателей:
- Точное позиционирование вала
- Высокая скорость реакции
- Возможность удержания заданного положения
- Простое управление через ШИМ-сигнал
- Компактные размеры
Серводвигатели отлично подходят для проектов, где требуется точное управление положением, например, в роботах-манипуляторах или системах позиционирования.

Преимущества серводвигателей:
- Высокая точность позиционирования
- Простота управления
- Компактность
- Высокий момент при малых размерах
Недостатки:
- Ограниченный угол поворота (обычно до 180°)
- Относительно высокая стоимость
- Большое энергопотребление
Двигатели постоянного тока
Двигатели постоянного тока (DC-двигатели) — самый простой и распространенный тип электродвигателей. Они широко используются в проектах Arduino благодаря своей доступности и простоте управления.
Особенности DC-двигателей:
- Простая конструкция
- Низкая стоимость
- Высокая скорость вращения
- Возможность реверса
- Широкий диапазон мощностей
DC-двигатели подходят для проектов, где нужно простое вращательное движение, например, в колесных роботах или вентиляторах.
Преимущества DC-двигателей:
- Низкая цена
- Простота управления
- Высокий КПД
- Широкий выбор моделей
Недостатки:
- Сложность точного позиционирования
- Износ щеток
- Электромагнитные помехи
Шаговые двигатели для Arduino
Шаговые двигатели позволяют осуществлять точное позиционирование и контроль скорости вращения. Они часто используются в 3D-принтерах, ЧПУ-станках и других устройствах, требующих прецизионного управления.
Особенности шаговых двигателей:
- Дискретное вращение фиксированными шагами
- Высокая точность позиционирования
- Возможность удержания позиции без питания
- Управление без обратной связи
- Широкий диапазон скоростей
Шаговые двигатели идеально подходят для проектов с точным позиционированием и контролем скорости.
Преимущества шаговых двигателей:
- Высокая точность
- Простое цифровое управление
- Возможность работы без датчика положения
- Высокий момент на низких оборотах
Недостатки:
- Сложная схема управления
- Возможность пропуска шагов при перегрузке
- Низкий КПД на высоких скоростях
Бесколлекторные двигатели
Бесколлекторные двигатели (BLDC) сочетают преимущества коллекторных DC-двигателей и шаговых двигателей. Они широко применяются в современной робототехнике и радиоуправляемых моделях.
Особенности BLDC-двигателей:
- Высокая эффективность
- Большой крутящий момент
- Широкий диапазон скоростей
- Длительный срок службы
- Низкий уровень шума и вибраций
Преимущества BLDC-двигателей:
- Высокий КПД
- Большой ресурс работы
- Низкие шумы и вибрации
- Высокая удельная мощность
Недостатки:
- Высокая стоимость
- Сложная система управления
- Необходимость датчиков положения ротора
Как выбрать двигатель для проекта Arduino
При выборе двигателя для проекта Arduino следует учитывать несколько факторов:
- Требуемая точность позиционирования
- Необходимый крутящий момент
- Диапазон рабочих скоростей
- Потребляемая мощность
- Габариты и вес
- Стоимость
- Сложность управления
Для простых проектов с невысокими требованиями к точности подойдут обычные DC-двигатели. Если нужна высокая точность позиционирования, лучше использовать серводвигатели или шаговые двигатели. Для мощных высокоскоростных применений оптимальным выбором будут бесколлекторные двигатели.
Схемы подключения двигателей к Arduino
Подключение двигателей к Arduino обычно требует использования дополнительных драйверов. Рассмотрим базовые схемы для разных типов двигателей.
Подключение серводвигателя:
- Подключите красный провод серводвигателя к 5V на Arduino
- Подключите черный/коричневый провод к GND
- Подключите оранжевый/желтый провод к цифровому пину Arduino
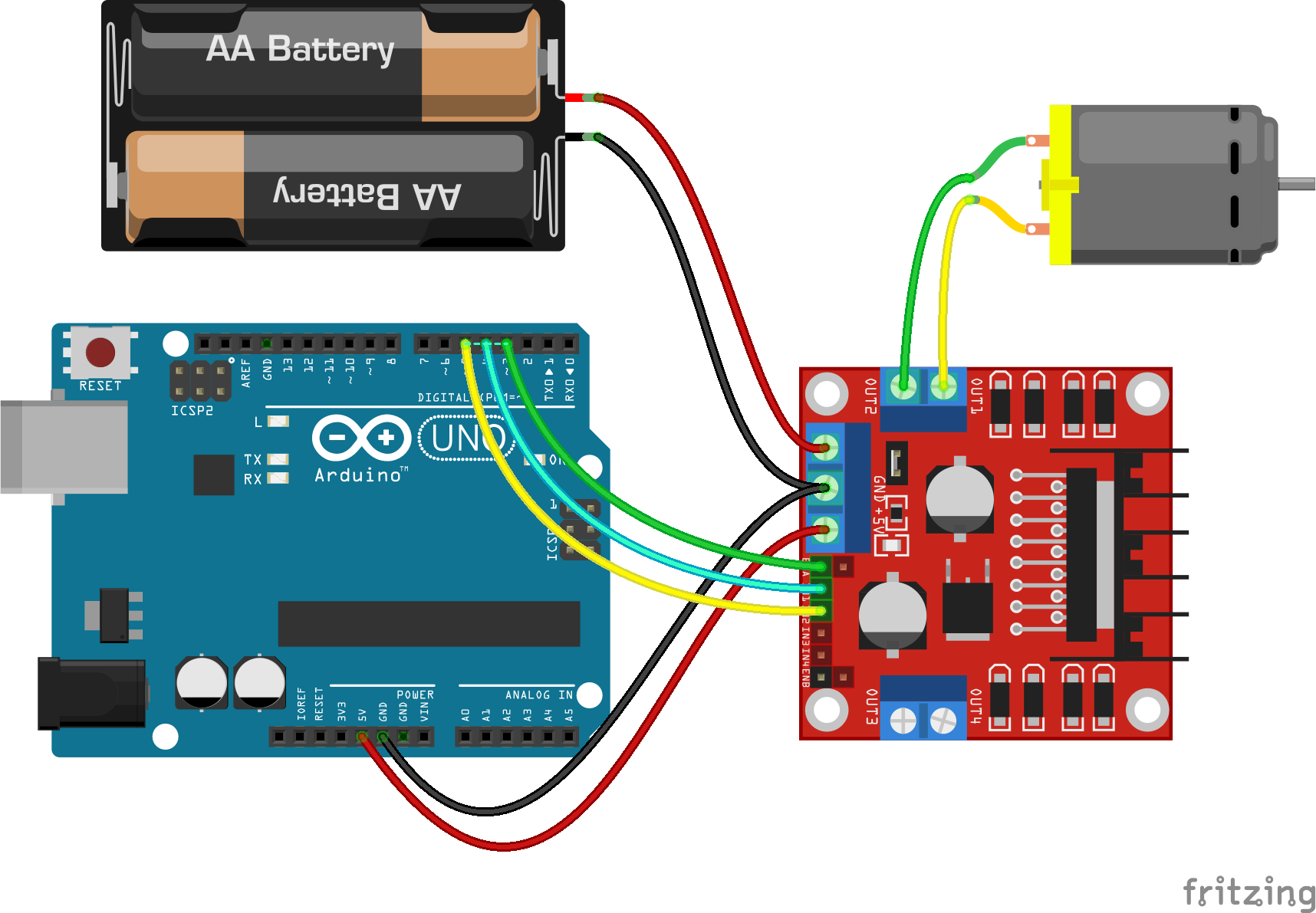
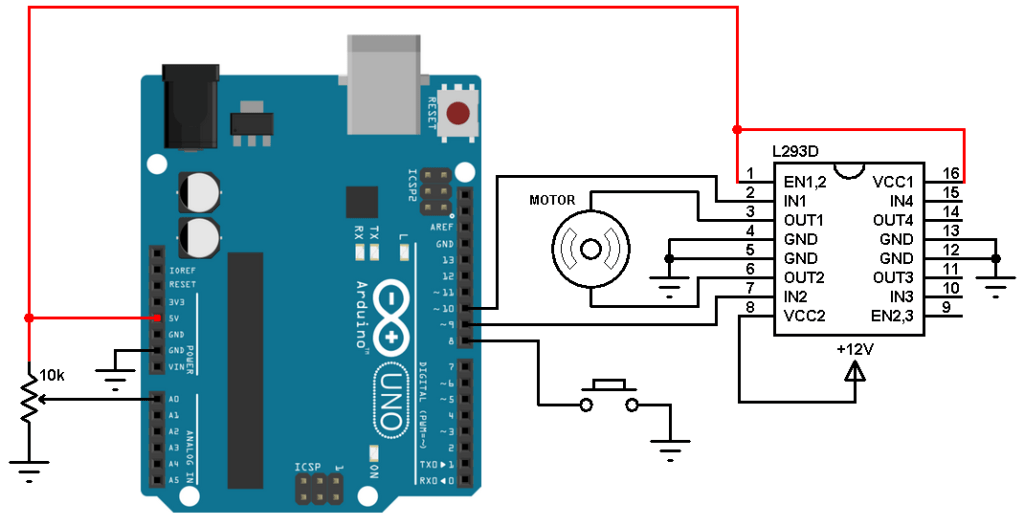
Подключение DC-двигателя:
- Подключите двигатель к выходам драйвера двигателя (например, L293D)
- Соедините входы драйвера с цифровыми пинами Arduino
- Подключите питание драйвера и Arduino
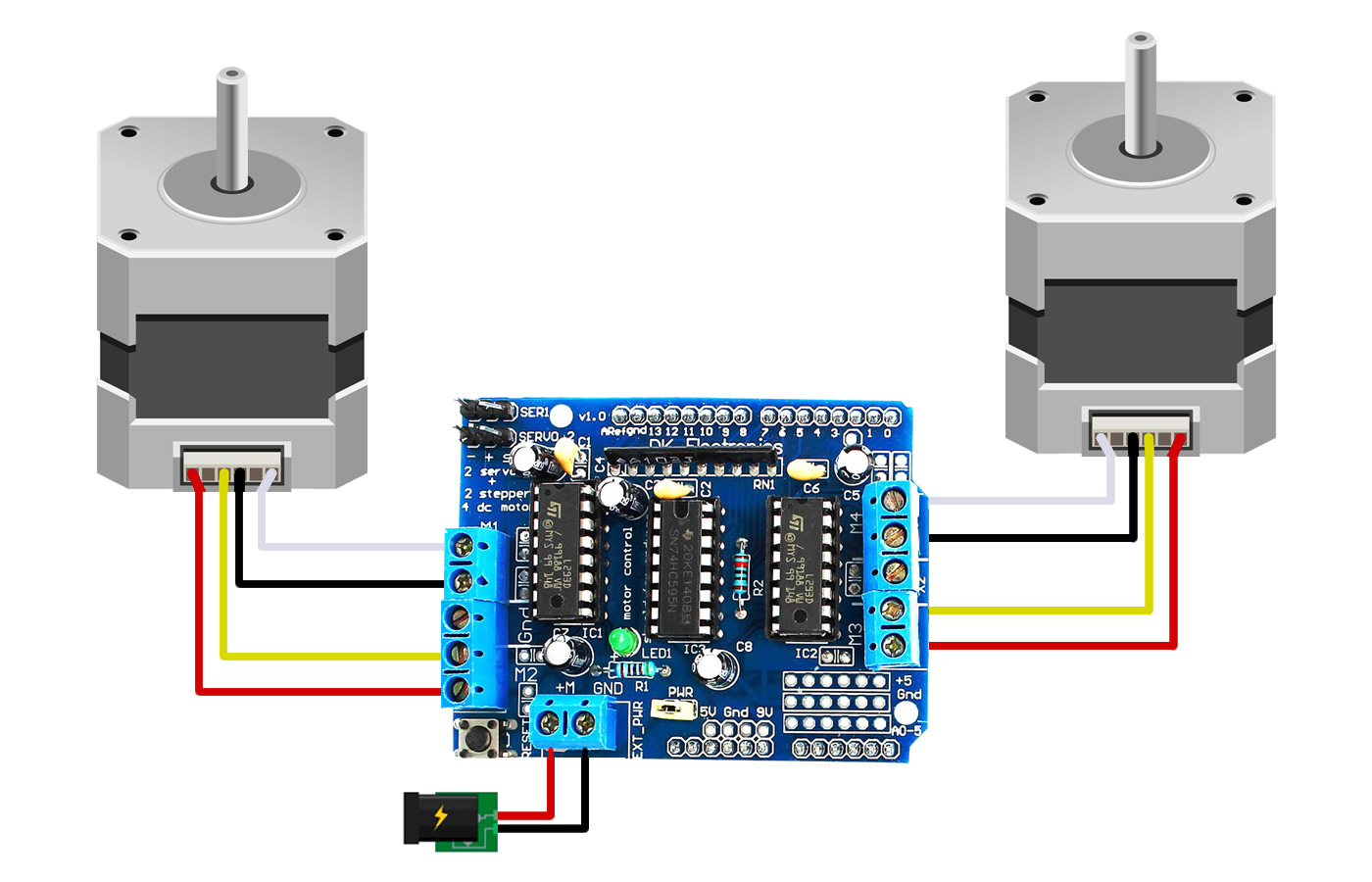
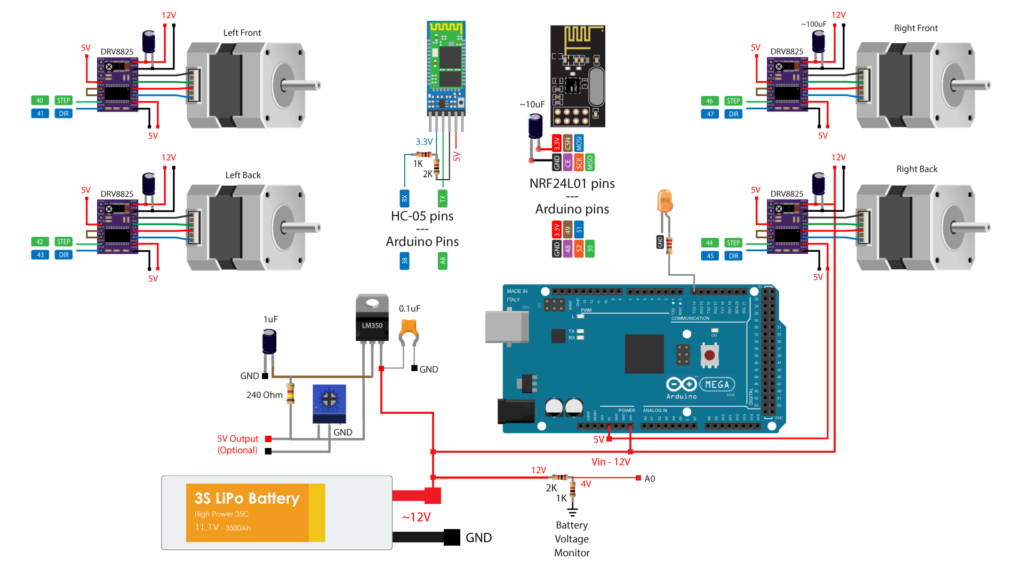
Подключение шагового двигателя:
- Подключите обмотки двигателя к выходам драйвера (например, A4988)
- Соедините входы STEP и DIR драйвера с цифровыми пинами Arduino
- Подключите питание драйвера и Arduino
Для более сложных схем и высокомощных двигателей может потребоваться использование специализированных драйверов и отдельных источников питания.

Программирование двигателей на Arduino
Управление двигателями на Arduino осуществляется с помощью специальных библиотек и функций. Рассмотрим базовые примеры для разных типов двигателей.
Управление серводвигателем:
#include <Servo.h>
Servo myservo;
void setup() {
myservo.attach(9);
}
void loop() {
myservo.write(90); // Установка угла 90 градусов
delay(1000);
}
Управление DC-двигателем:
int motorPin = 9;
void setup() {
pinMode(motorPin, OUTPUT);
}
void loop() {
analogWrite(motorPin, 128); // Установка скорости 50%
delay(1000);
}
Управление шаговым двигателем:
#include <Stepper.h> const int stepsPerRevolution = 200; Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11); void setup() { myStepper.setSpeed(60); } void loop() { myStepper.step(stepsPerRevolution); delay(1000); }
Эти примеры демонстрируют базовое управление двигателями. Для более сложных проектов могут потребоваться дополнительные библиотеки и алгоритмы управления.
Заключение
Выбор правильного двигателя — важный этап в разработке проекта на Arduino. Каждый тип двигателя имеет свои преимущества и недостатки, которые необходимо учитывать при проектировании. Серводвигатели отлично подходят для точного позиционирования, DC-двигатели просты и доступны, шаговые двигатели обеспечивают высокую точность, а бесколлекторные двигатели сочетают высокую производительность с длительным сроком службы.

При выборе двигателя важно учитывать требования проекта, такие как точность, мощность, скорость и стоимость. Правильный выбор двигателя и схемы управления позволит создать эффективный и надежный проект на Arduino.
Шаговый двигатель для ардуино | Stepmotor
Статьи
Чтобы организовать работу шагового двигателя или сервопривода по необходимому алгоритму: задать скорость, углы поворота, а также параметры вращения требуется использовать отдельную вычислительную платформу Arduino.
Что такое шаговый двигатель для ардуино
Arduino представляет собой готовую вычислительную платформу, выполненную в виде набора печатных плат и микроконтроллера, которая управляется программно. Скетчи или наброски (программы для Arduino) могут быть созданы на языке программирования C++ и закачаны на устройство через USB, Ethernet или RS232. Кроме того Arduino имеет встроенный интерфейс UART, а также SPI и I2C. Другим способом программирования устройства является программатор, поддержка которого осуществляется встроенным в IDE модулем.
На сегодняшний день Arduino выпускается как оригинальной фирмой Arduino, так и фирмами-клонами, поскольку востребованность ардуино в мировом рынке крайне высока.
Выбираем шаговый двигатель для ардуино
Периферия ардуино поддерживает работы с шаговым или коллекторным двигателем. Диапазон мощностей силовых установок может колебаться до 12В, сила тока – до 2А на один канал. Дополнительная плата расширения позволяет осуществлять двухканальное управление направлением и скоростью вращения, при этом предельное напряжение может достигать 24В. Управлять большой нагрузкой можно при помощи специальных устройств расширения типа Motor Shield.
Сегодня шаговый двигатель для ардуино может быть гибридным, с отрицательным потенциалом, постоянного тока.
Для полноценной работы всей системы потребуется иметь следующий комплект оборудования:
- Силовая установка
- Плата ардуино
- Плата управления силовой установки
- Источник питания
Для начала работы системы необходимо собрать схему, загрузить рабочую программу на микроконтроллер и запустить ее.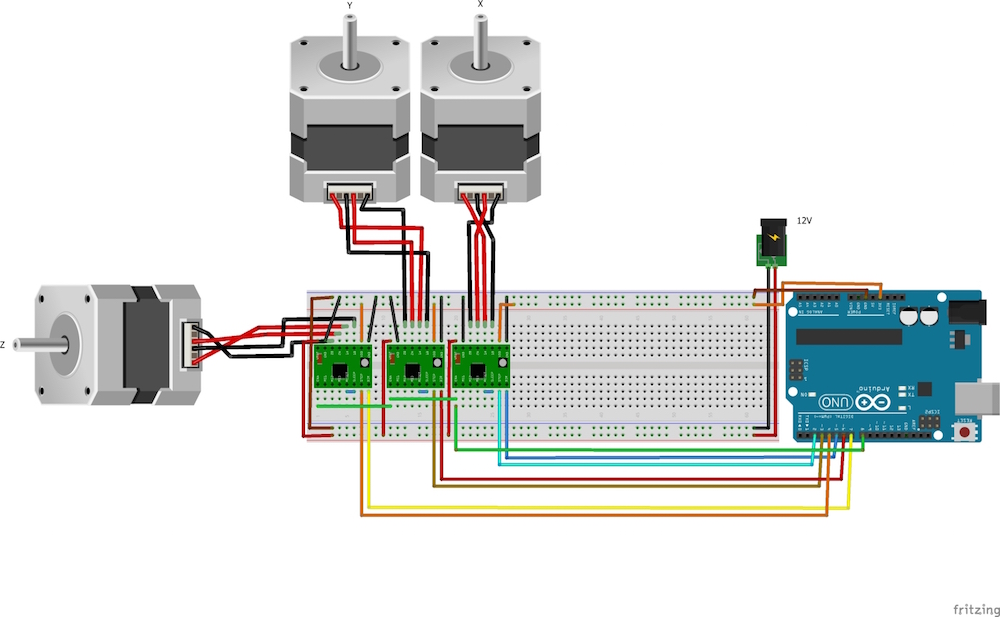 Важно помнить, что каждый шаговый двигатель для ардуино обладает отличительными техническими характеристиками, и использовать универсальную программу можно, но обязательно убедившись в ее адаптированности для данной силовой установки.
Важно помнить, что каждый шаговый двигатель для ардуино обладает отличительными техническими характеристиками, и использовать универсальную программу можно, но обязательно убедившись в ее адаптированности для данной силовой установки.
Основные правила подключения
Обращаем ваше внимание, что подключая шаговый двигатель к адуино, нужно обратить внимание базовые правила.
В первую очередь во время подачи питания нельзя отключать или подключать силовую установку. Библиотека для ардуино может быть расширена, это позволяет улучшить качество работы силовой установки: например, повысить КПД возможно путем снижения вибраций. Мощность адаптера имеет ключевое значение в работу системы.
Выбирая систему помните, что стоит заранее оценить требующийся ресурс жизни устройства. выбрав правильное решение, вы сможете сэкономить на покупке или ремонте вышедшего из строя, некорректно подобранного устройства.
Купить Шаговый двигатель для ардуино
Торговый Дом «Степмотор» занимается поставками систем промышленной автоматизации, шаговыми двигателями, мотор-редукторами и другими силовыми системами, а также системами позиционирования. Мы бесплатно подберем шаговый двигатель для ардуино по вашему техническому заданию, порекомендуем надежных производителей и поставим оборудование в срок.
Мы бесплатно подберем шаговый двигатель для ардуино по вашему техническому заданию, порекомендуем надежных производителей и поставим оборудование в срок.
Вы выбираете надежного партнера, с опытом работы в области промышленной автоматизации свыше 10 лет. Мы работаем как с оптовыми, так и с розничными заказами. Кроме того нам доверяют проекты Федерального уровня и государственных масштабов.
Позвоните нам или напишите на электронную почту [email protected], и мы проконсультируем вас по интересующей вас продукции в течение 15 минут (по рабочим дням).
Pololu Dual G2 High-Power Motor Driver Shield 24v14 Shield для Arduino
Обзор
Семейство G2 двойных драйверов мощных двигателей оснащено парами дискретных MOSFET Н-мостов, предназначенных для управления двумя большими щетками постоянного тока. моторы. Они имеют форм-фактор платы Arduino, поэтому их можно подключать непосредственно к Arduino или совместимой плате, такой как A-Star 32U4 Prime, но они также выламывают все контакты драйвера двигателя вдоль левой стороны платы, чтобы включить использование в качестве драйвера двигателя общего назначения без Arduino. Доступны четыре версии, так что вы можете выбрать ту, которая соответствует диапазону рабочего напряжения и возможностям выходного тока для вашего проекта:
Доступны четыре версии, так что вы можете выбрать ту, которая соответствует диапазону рабочего напряжения и возможностям выходного тока для вашего проекта:
| Dual G2 High- Драйвер силового двигателя Экран 18v22 |
Dual G2 High- Силовой привод двигателя Экран 18v18 |
Dual G2 High- Драйвер силового двигателя Экран 24v18 |
Dual G2 High- Драйвер силового двигателя Экран 24v14 |
|
|---|---|---|---|---|
| Абсолютное максимальное входное напряжение: |
30 В | 40 В | ||
| Максимальное номинальное напряжение батареи : |
18 В | 28 В | ||
| Макс. непрерывный ток на канал: |
22 А | 18 А | 18 А | 14 А |
| Активный ток по умолчанию — порог ограничения : |
60 А | 50 А | 40 А | |
| Измерение тока выход: |
10 мВ/А | 20 мВ/А | ||
Минимальное рабочее напряжение для всех четырех версий составляет 6,5 В.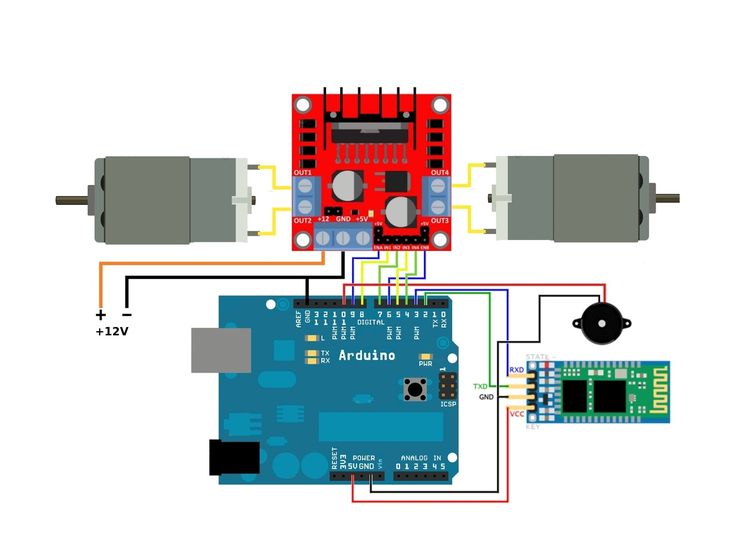 Максимальное рабочее напряжение указано в таблице выше; они намного выше того, что может выдержать типичный Arduino, поэтому экраны включают в себя встроенный импульсный понижающий регулятор 7,5 В, 1 А, который можно дополнительно использовать для питания любой Arduino или платы, совместимой с Arduino, к которой он подключен, что позволяет работать с одного источник питания. Этот регулятор также можно настроить на вывод 5 В для приложений, где это будет более полезно, чем 7,5 В по умолчанию, а сопоставления выводов Arduino можно настроить, если значения по умолчанию неудобны.
Максимальное рабочее напряжение указано в таблице выше; они намного выше того, что может выдержать типичный Arduino, поэтому экраны включают в себя встроенный импульсный понижающий регулятор 7,5 В, 1 А, который можно дополнительно использовать для питания любой Arduino или платы, совместимой с Arduino, к которой он подключен, что позволяет работать с одного источник питания. Этот регулятор также можно настроить на вывод 5 В для приложений, где это будет более полезно, чем 7,5 В по умолчанию, а сопоставления выводов Arduino можно настроить, если значения по умолчанию неудобны.
Эти драйверы с двумя двигателями также доступны в виде плат расширения Raspberry Pi. Для одноканальных версий в более компактном форм-факторе рассмотрите наши драйверы двигателей высокой мощности. В качестве менее мощной и недорогой альтернативы Arduino Shield рассмотрите Dual MC33926 Motor Driver Shield.
Детали для товара № 2516
|
|
|
- Рабочее напряжение: от 6,5 В до 40 В (абсолютный максимум; не предназначен для использования с батареями на 36 В)
- Выходной ток: 14 А, непрерывный
- Выход датчика тока, пропорциональный току двигателя (прибл. 20 мВ/А; активен только при работе H-моста)
- Активное ограничение тока (прерывание) с приблизительным порогом по умолчанию 40 А (можно уменьшить)
Эту версию, 24v14 , щит драйвера двигателя, можно отличить от других версий по синей плате и номеру 100 поверх высоких электролитических конденсаторов серебристого цвета.
Особенности, общие для всех версий
| Pololu Dual G2 High Power Motor Driver Shield, управляемый A-Star 32U4 Prime. |
|---|
- Входы, совместимые с логикой 1,8 В, 3,3 В и 5 В
- Режим ШИМ до 100 кГц
- Светодиодные индикаторы двигателя показывают, что делают выходы, даже если двигатель не подключен
- Защита от обратного напряжения
- Отключение при пониженном напряжении
- Защита от короткого замыкания
- Интерфейс управления допускает работу со знаком или противофазой
- Встроенный импульсный понижающий стабилизатор напряжения 7,5 В, 1 А (вместо этого можно настроить на выход 5 В)
- Библиотека Arduino упрощает начало работы с этой платой в качестве защитного экрана драйвера двигателя
- Подробное руководство пользователя
- Сопоставление выводов Arduino можно настроить, если сопоставления по умолчанию неудобны
- При использовании в качестве экрана источник питания двигателя или выход регулятора 7,5 В можно дополнительно использовать для питания базы Arduino для работы с однополярным питанием
- Может использоваться с платой Arduino или совместимой платой (через щитовые разъемы) или другими платами микроконтроллеров (через 0,1-дюймовый разъем вдоль левой стороны)
|
|
Оборудование в комплекте
| Мощный драйвер двигателя Pololu Dual G2 18v18 Shield для Arduino с включенным оборудованием. |
|---|
| Для сильноточных установок провода двигателя и питания следует припаивать непосредственно к приводу (поставляемые клеммные колодки рассчитаны только на ток до 16 А). |
|---|
Эта плата драйвера двигателя поставляется со всеми установленными деталями для поверхностного монтажа. Однако для сборки входящих в комплект деталей со сквозными отверстиями требуется пайка. В комплект входят следующие сквозные детали:
- один удлиненный/штабелируемый разъем 1×10 (для плат Arduino)
- два удлиненных/штабелируемых гнездовых разъема 1×8 (для плат Arduino)
- два удлиненных/штабелируемых гнездовых разъема 1×6 (для плат Arduino)
- три 2-контактных клеммных блока 5 мм (для питания платы и выходов двигателя)
- 40-контактный прямой разъемный штекерный разъем 0,1″ (может поставляться в виде нескольких частей, например, двух 20-контактных полос)
Также в комплект входит блок короткого замыкания 0,1″ (для дополнительной подачи питания на Arduino).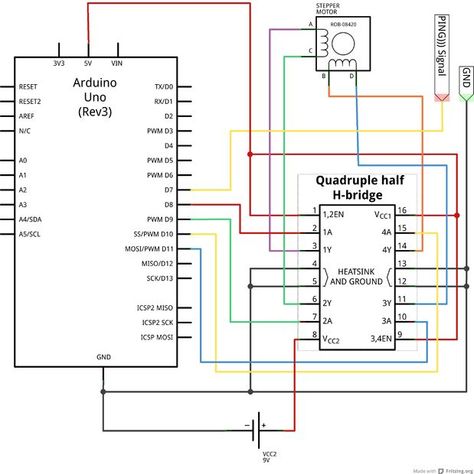
Вы можете припаять клеммные колодки к шести большим сквозным отверстиям, чтобы подключить двигатель и питание двигателя, или вы можете отломить секцию 1 × 12 0,1-дюймовой контактной полосы и припаять ее к меньшим сквозным отверстиям, которые границы этих больших отверстий. Обратите внимание, однако, что клеммные колодки рассчитаны только на 16 А, а каждая пара штыревых контактов рассчитана только на суммарный ток 6 А, поэтому для приложений с большей мощностью толстые провода следует припаивать непосредственно к плате, а соответствующие высоковольтные следует использовать токовые разъемы (такие как эти).
Если эта плата не используется в качестве экрана Arduino, вы можете припаять 0,1-дюймовые разъемы к логическим соединениям вдоль левой стороны платы, чтобы можно было использовать специальные кабели или макетные платы без пайки, или вы можете припаять провода непосредственно к плате для более компактные установки. Обратите внимание, что соединения двигателя и питания двигателя не должны выполняться через макетную плату.
Драйвер двигателя включает шесть электролитических силовых конденсаторов емкостью 100 мкФ или 150 мкФ, и есть место для добавления дополнительных конденсаторов (например, для компенсации длинных проводов питания или повышения стабильности источника питания). Дополнительные силовые конденсаторы обычно не требуются, и в этот драйвер двигателя дополнительные конденсаторы не входят.
Два монтажных отверстия предназначены для использования с винтами № 4 (не входят в комплект).
Измерение и ограничение тока
Контакты датчика тока драйвера, M1CS и M2CS, выходные напряжения пропорциональны току двигателя во время работы Н-моста. Выходное напряжение составляет около 10 мВ/А для версии 18v22 и 20 мВ/А для других версий плюс небольшое смещение, которое обычно составляет около 50 мВ.
Драйвер имеет возможность ограничивать ток двигателя посредством прерывания тока: как только ток привода двигателя достигает установленного порога, драйвер переходит в режим торможения (медленное затухание) примерно на 25 мкс, прежде чем снова подать питание на двигатель.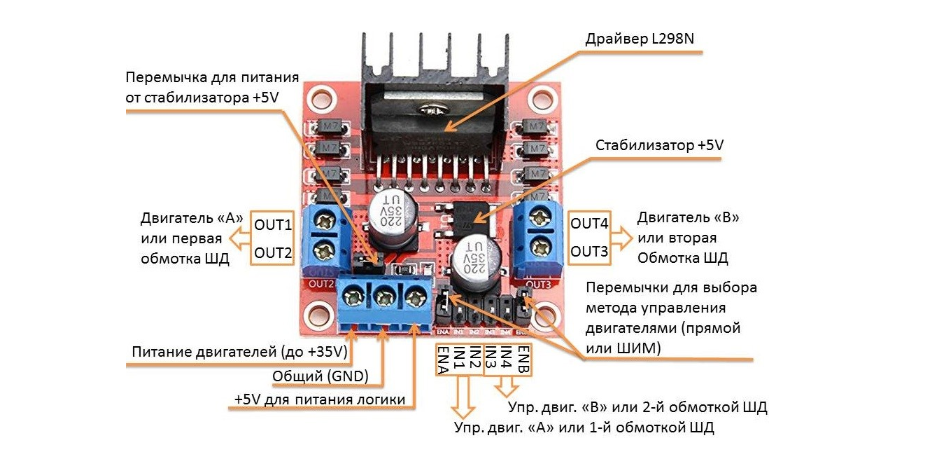 Это делает более практичным использование драйвера с двигателем, который может потреблять всего несколько ампер во время работы, но может потреблять во много раз больше (десятки ампер) при запуске. Вы можете снизить порог ограничения тока по умолчанию, подключив дополнительный резистор между контактом VREF и соседним контактом GND.
Это делает более практичным использование драйвера с двигателем, который может потреблять всего несколько ампер во время работы, но может потреблять во много раз больше (десятки ампер) при запуске. Вы можете снизить порог ограничения тока по умолчанию, подключив дополнительный резистор между контактом VREF и соседним контактом GND.
Дополнительные сведения об обратной связи по току и ограничении тока см. в руководстве пользователя.
Рассеиваемая мощность в реальных условиях
Полевые МОП-транзисторы могут выдерживать кратковременные кратковременные пики тока (например, 100 А в течение нескольких миллисекунд), а прерывание тока драйвером будет удерживать средний ток ниже установленного предела. Пиковые значения предназначены для быстрых переходных процессов (например, при первом включении двигателя), а непрерывные значения зависят от различных условий, таких как температура окружающей среды. ШИМ двигателя вносит дополнительный нагрев, пропорциональный частоте. Фактический ток, который вы можете подать, будет зависеть от того, насколько хорошо вы сможете охлаждать драйвер двигателя.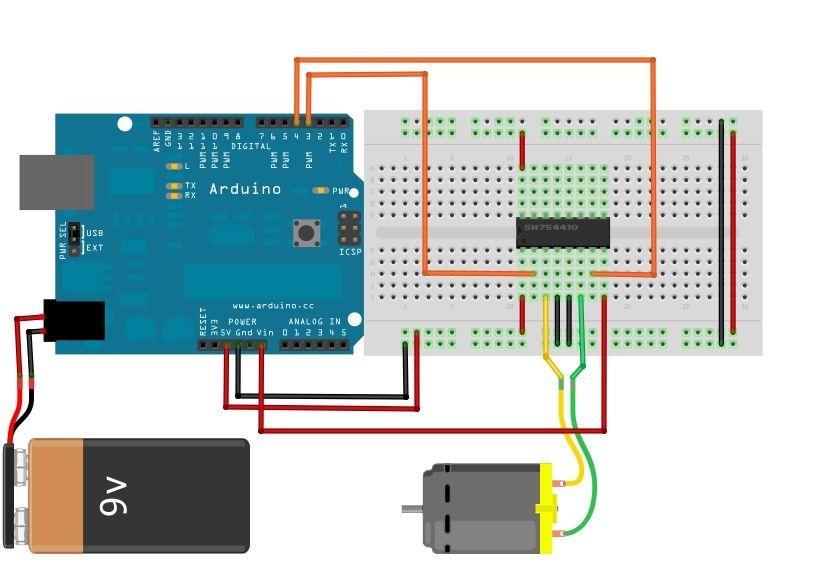 Печатная плата драйвера предназначена для отвода тепла от МОП-транзисторов, но производительность можно улучшить, добавив радиатор или поток воздуха. Для сильноточных установок провода двигателя и питания также следует припаивать напрямую, а не через прилагаемые клеммные колодки, которые рассчитаны на ток до 16 А.
Печатная плата драйвера предназначена для отвода тепла от МОП-транзисторов, но производительность можно улучшить, добавив радиатор или поток воздуха. Для сильноточных установок провода двигателя и питания также следует припаивать напрямую, а не через прилагаемые клеммные колодки, которые рассчитаны на ток до 16 А.
Предупреждение: Этот привод двигателя не имеет функции отключения при перегреве. Состояние перегрева или перегрузки по току может привести к необратимому повреждению привода двигателя. Вы можете рассмотреть возможность использования либо встроенного выхода датчика тока драйвера, либо внешнего датчика тока для контроля потребляемого тока.
Этот продукт может нагреть до такой степени, чтобы гореть при нормальных условиях эксплуатации. Будьте осторожны при обращении с этим продуктом и другими компонентами, связанными с ним.
Версии драйверов двигателей большой мощности G2
Существует четыре версии одноканальных драйверов двигателей большой мощности G2 с совместимой разводкой выводов и восемь версий двухканальных драйверов двигателей большой мощности G2.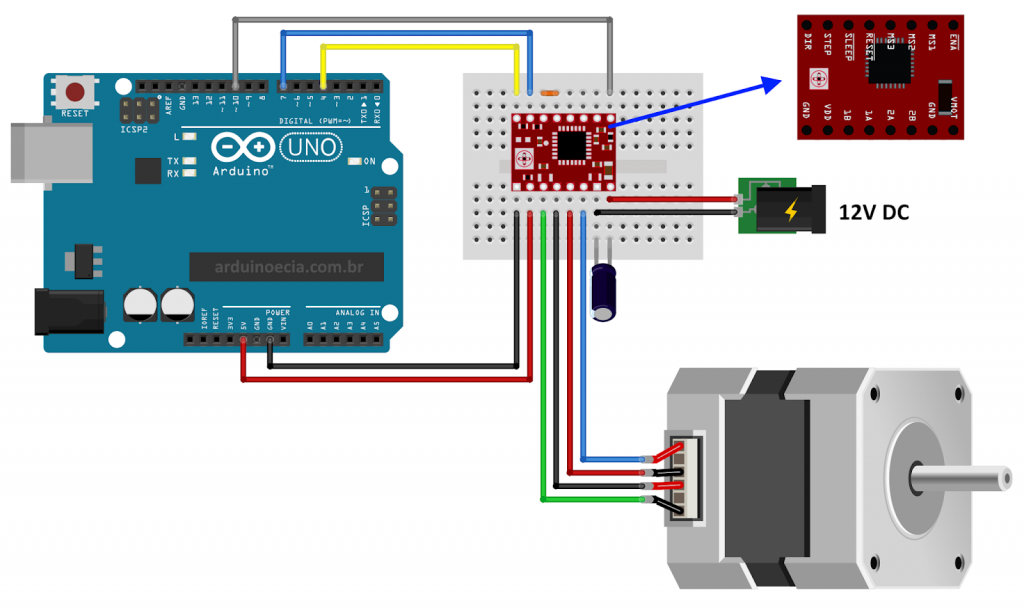 Четыре двухканальных драйвера имеют форм-фактор платы Arduino, но их также можно использовать с другими контроллерами в качестве драйверов двигателей общего назначения. Остальные четыре двухканальных драйвера имеют форм-фактор Raspberry Pi HAT и совместимых плат Raspberry Pi (модель B+ или новее). В следующей таблице представлено сравнение драйверов G2:
Четыре двухканальных драйвера имеют форм-фактор платы Arduino, но их также можно использовать с другими контроллерами в качестве драйверов двигателей общего назначения. Остальные четыре двухканальных драйвера имеют форм-фактор Raspberry Pi HAT и совместимых плат Raspberry Pi (модель B+ или новее). В следующей таблице представлено сравнение драйверов G2:
| Драйверы мощных двигателей Pololu G2 | |||||
|---|---|---|---|---|---|
| Двигатель каналов |
Имя | Абсолютное максимальное входное напряжение |
Максимальное номинальное напряжение батареи |
Макс. непрерывный ток на каналов |
По умолчанию активен ограничение тока порог |
| 1 | Мощный драйвер двигателя G2 18v25 | 30 В | 18 В | 25 А | 60 А |
| Мощный драйвер двигателя G2 18v17 | 17 А | 40 А | |||
| Драйвер двигателя высокой мощности G2 24v21 | 40 В | 28 В | 21 А | 50 А | |
| Драйвер двигателя высокой мощности G2 24v13 | 13 А | 30 А | |||
| 2 | Мощный драйвер двигателя Dual G2 18v22 Shield | 30 В | 18 В | 22 А | 60 А |
| Мощный драйвер двигателя Dual G2 18v18 Shield | 18 А | 50 А | |||
| Мощный драйвер двигателя Dual G2 24v18 Shield | 40 В | 28 В | 18 А | 50 А | |
| Мощный драйвер двигателя Dual G2 24v14 Shield | 14 А | 40 А | |||
| Мощный драйвер двигателя Dual G2 18v22 для RPi | 30 В | 18 В | 22 А | 60 А | |
| Мощный драйвер двигателя Dual G2 18v18 для RPi | 18 А | 50 А | |||
| Мощный драйвер двигателя Dual G2 24v18 для RPi | 40 В | 28 В | 18 А | 50 А | |
| Мощный драйвер двигателя Dual G2 24v14 для RPi | 14 А | 40 А | |||
| Мощный драйвер двигателя Pololu G2 24v21 и 24v13. |
|---|

|
|
|
|
Примечание: В качестве альтернативы этим драйверам двигателей наши простые контроллеры двигателей имеют аналогичные характеристики мощности и предлагают высокоуровневые интерфейсы (например, USB, радиоимпульсы сервопривода для хобби, аналоговые напряжения и последовательные команды TTL), которые упрощают их использование. использовать для некоторых приложений.
использовать для некоторых приложений.
Направляющая двигателя Arduino | 6 проектов Arduino со спином
Выбор правильного двигателя Arduino
В этом руководстве по двигателям Arduino мы рассмотрим основную информацию, которую вам необходимо знать, прежде чем выбрать двигатель для своего проекта. Если вы уже некоторое время работаете над электроникой DIY и чувствуете себя достаточно уверенно в своих способностях, возможно, вы ищете возможности и вознаграждения, работая над более крупными, лучшими и более сложными изобретениями. Когда дело доходит до продвинутых сборок, моторизованные создания, такие как роботы на основе Arduino, часто являются одними из самых популярных; и не без оснований, они очень классные!
Существует множество различных типов двигателей Arduino, каждый из которых имеет свои сильные и слабые стороны. По этой причине вы обнаружите, что не каждый двигатель идеально подходит для каждой задачи: некоторые из них превосходны в одних областях, но не справляются с ними в других. Сегодня мы подробно рассмотрим некоторые из многих типов электродвигателей, с которыми вы, вероятно, столкнетесь при покупке электроники, а также несколько советов о том, как, когда и где использовать конкретный двигатель для производства электроники. Убедитесь, что у вас всегда есть правильный комплект для работы в зависимости от того, что вам нужно для вашего нового моторизованного проекта.
Сегодня мы подробно рассмотрим некоторые из многих типов электродвигателей, с которыми вы, вероятно, столкнетесь при покупке электроники, а также несколько советов о том, как, когда и где использовать конкретный двигатель для производства электроники. Убедитесь, что у вас всегда есть правильный комплект для работы в зависимости от того, что вам нужно для вашего нового моторизованного проекта.
И для вдохновения мы также кратко рассмотрим некоторые из моторизованных сборок, которые мы собрали, чтобы помочь вам раскрыть свой творческий потенциал, а также продемонстрируем функциональность некоторых моторов, которые мы будем искать. в. Так что, если вы начинающий творец, желающий разобраться в моторных системах Arduino, чтобы вывести свои сборки на новый уровень, то вы определенно попали по адресу.
Типы двигателей Arduino
Серводвигатели
Серводвигатели являются одними из самых популярных двигателей, используемых любителями, которым требуется функциональность двигателя при работе над своими проектами Arduino. Причина их популярности заключается в том, что серводвигатели являются чрезвычайно универсальными электродвигателями.
Причина их популярности заключается в том, что серводвигатели являются чрезвычайно универсальными электродвигателями.
Серводвигатель — это краткое название обычного двигателя постоянного тока, соединенного с датчиком обратной связи по положению и небольшой платой управления. Это позволяет легко управлять двигателем прямо из коробки через Arduino с использованием сигнала PWM. Серводвигатели являются лучшим выбором среди любителей и широко используются в современной промышленности и, в частности, в робототехнике, где они хорошо зарекомендовали себя в обеспечении точного управления моторикой конечностей роботов, а также в механизированных протезах, используемых людьми с ампутированными конечностями.
Как это работает
В общих чертах серводвигатель может быть линейным или поворотным приводом, то есть он способен точно управлять линейным или угловым движением. На самом деле это не отдельный тип двигателя, а комбинация двигателя, схемы управления и датчика обратной связи по положению, объединенных в единый рабочий блок
.
Управление сервоприводом
Хотя некоторые сервоприводы предназначены для работы на основе аналоговых импульсов, те, которые обычно можно найти на рынках любителей, гораздо чаще представляют собой сервоприводы с ШИМ-управлением, предназначенные для работы с микроконтроллерами. С помощью драйвера/усилителя двигателя Arduino (который в схеме управления называется индексатором) управляет порядком электрических импульсов, посылаемых на двигатель через усилитель.
Pros
- Чрезвычайно универсальные сервоприводы
- Простота управления и программирования через цифровой выход
- Высокая точность — не все
- не требует вычислений контура управления управление вращением
Минусы
- Высокая потребляемая мощность
- Обычно дороже обычных двигателей подходят для больших нагрузок или длительного использования и склонны к стиранию (беззубость со временем)
Двигатели постоянного тока
Хотя стандартный коллекторный двигатель постоянного тока (DC) может быть немного устаревшим, он настолько прост, насколько это возможно. Простые в сборке и дешевые в изготовлении, они используются практически во всех областях, где требуются электродвигатели.
Простые в сборке и дешевые в изготовлении, они используются практически во всех областях, где требуются электродвигатели.
Принцип работы
Коллекторный двигатель постоянного тока состоит из нечетного набора токопроводящих обмоток, расположенных вокруг центральной оси, к которой прикреплен коллектор. Внешний узел содержит два магнита с противоположными полярностями. Когда обмотки находятся под напряжением, они заряжаются и начинают притягиваться к внешнему узлу, что приводит к вращению. Этот заряд изменяется, когда щетки соприкасаются с коллектором, что позволяет обмоткам продолжать испытывать притяжение к внешнему узлу, позволяя двигателю вращаться до тех пор, пока подается питание.
Управление двигателем постоянного тока
Как и следовало ожидать, простыми двигателями легко управлять. Что касается мощности, увеличение напряжения или силы тока может регулировать скорость вращения двигателя (об/мин) или крутящий момент соответственно.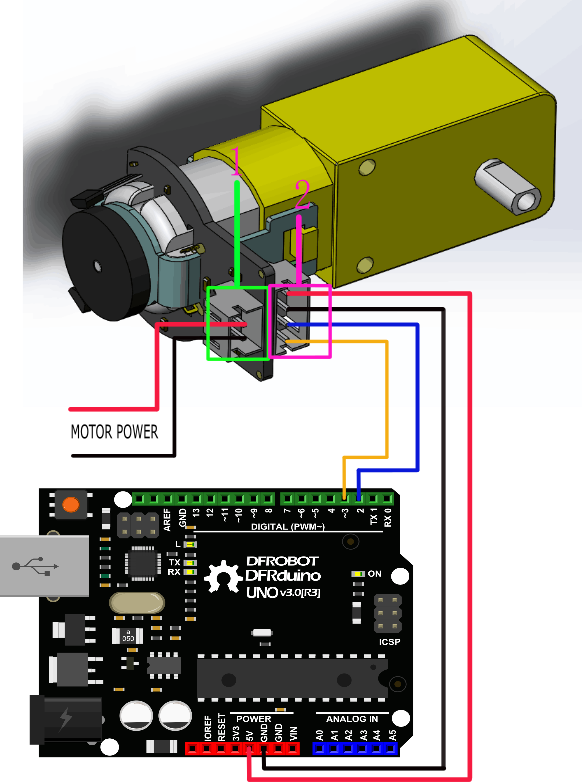 Чтобы изменить направление вращения двигателя, достаточно просто поменять полярность контактов двигателя.
Чтобы изменить направление вращения двигателя, достаточно просто поменять полярность контактов двигателя.
Для достижения большей точности, требуемой в современных приложениях, коллекторные двигатели постоянного тока могут быть соединены с устройством, называемым колесным энкодером/вращающимся энкодером. Эти устройства способны считывать и определять угловое положение оси двигателя, а затем микроконтроллер преобразует выходной сигнал в цифровую информацию. Эти данные можно использовать для определения местоположения, скорости двигателя и ускорения двигателя, к которому он подключен.
PROS
- Высокий крутящий момент
- Простая сборка и легко контролировать
- Очень дешево для производства
Cons
- HALU нагрев щеток и повреждение двигателя
- небольшое количество электромагнитных помех на радиочастотах
- требуется больше вычислений для управления с обратной связью
Запуск цепи двигателя постоянного тока
Шаговый двигатель
Шаговый двигатель, вариант обычного двигателя постоянного тока, является идеальным выбором, когда вам нужен двигатель, способный к точно контролируемым движениям для обеспечения точности, превосходящей возможности стандартного двигателя.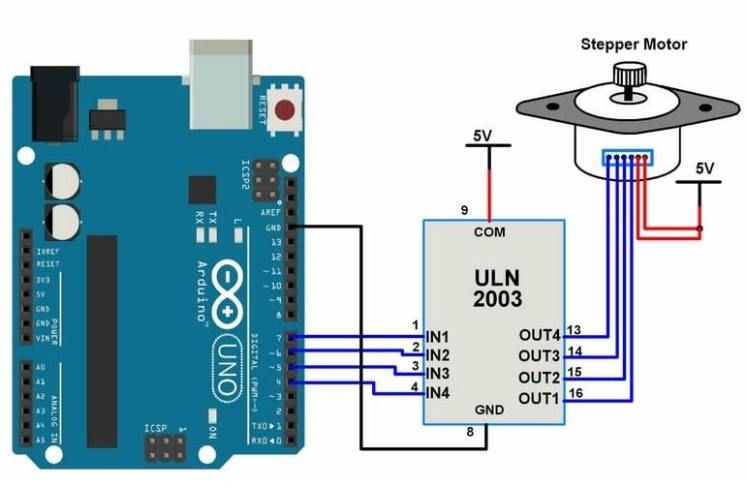 . Они обычно используются в полиграфической промышленности, а также в простых роботах, таких как заводские роботы-манипуляторы, сконфигурированные для конкретных задач.
. Они обычно используются в полиграфической промышленности, а также в простых роботах, таких как заводские роботы-манипуляторы, сконфигурированные для конкретных задач.
Как работает этот двигатель
В отличие от других двигателей, которые предназначены для обеспечения неограниченного вращения при использовании, шаговые двигатели предназначены для перемещения на определенное количество «шагов» с определенной скоростью при включении питания. При каждой зарядке мотор обеспечивает достаточную мощность для одного шага. Насколько мал каждый «шаг», указывает на общую точность двигателя.
Управление шаговым двигателем
В отличие от других типов двигателей, шаговый двигатель предназначен для использования с более совершенной электроникой, чтобы использовать преимущества точного управления двигателем, на которые он способен. По этой причине для шаговых двигателей требуется схема драйвера, которая соединяет их с системой управления (например, Arduino), способной регулировать мощность двигателя.
Pros
- Чрезвычайно точное управление работой
- Simplicity of construction and reliability
- High torque — not all
- Open loop control
Cons
- Highly specialized usage
- Requires advanced control system for proper operation
Start a Stepper Motor Circuit
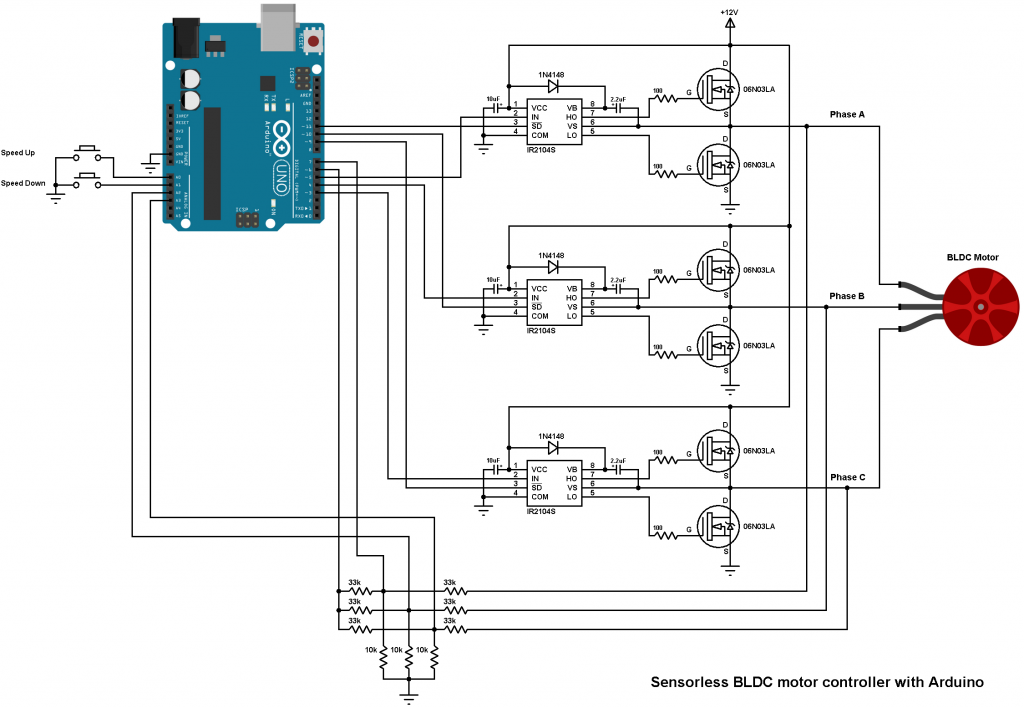
Бесколлекторный двигатель
Бесколлекторный двигатель, являющийся эволюцией щеточного двигателя, быстро становится предпочтительным двигателем для многих любителей и энтузиастов благодаря огромному потенциалу и повышенной надежности по сравнению с предшественниками. Как и щеточные двигатели, они обеспечивают хороший крутящий момент, а также могут надежно работать на высоких оборотах. Это делает бесщеточный двигатель чрезвычайно универсальным, очень эффективным в качестве двигателя Arduino и особенно популярным среди тех, кто собирает радиоуправляемые автомобили или дроны.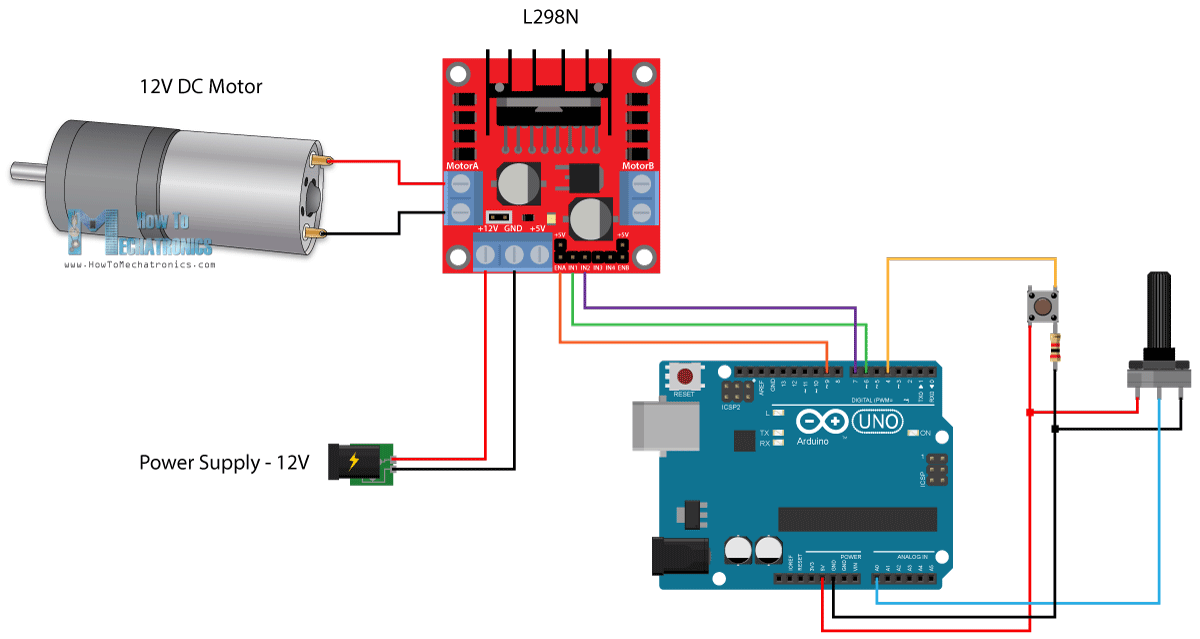
Принцип работы
Бесщеточный двигатель использует переменный ток для создания противоположных зарядов между обмотками и магнитами на внешнем узле. В этой конструкции вращается только внешний узел, прикрепленный к оси; Преимущество наличия только одной движущейся части в сочетании с отсутствием необходимости в контактных щетках заключается в том, что бесщеточные двигатели обладают более высокой энергоэффективностью, более длительным сроком службы, плавной передачей механической энергии на ось и низким коэффициентом трения.
Управление бесщеточным двигателем
Несмотря на то, что им сложнее управлять, чем простым щеточным двигателем, использование современных технологий значительно упрощает управление ими с помощью компьютеров. Датчики на эффекте Холла, которые могут обнаруживать изменения в магнитных полях и преобразовывать их в цифровую информацию, часто используются с бесщеточными двигателями для контроля и управления их выходным сигналом, точно так же, как колесные энкодеры используются с щеточными двигателями.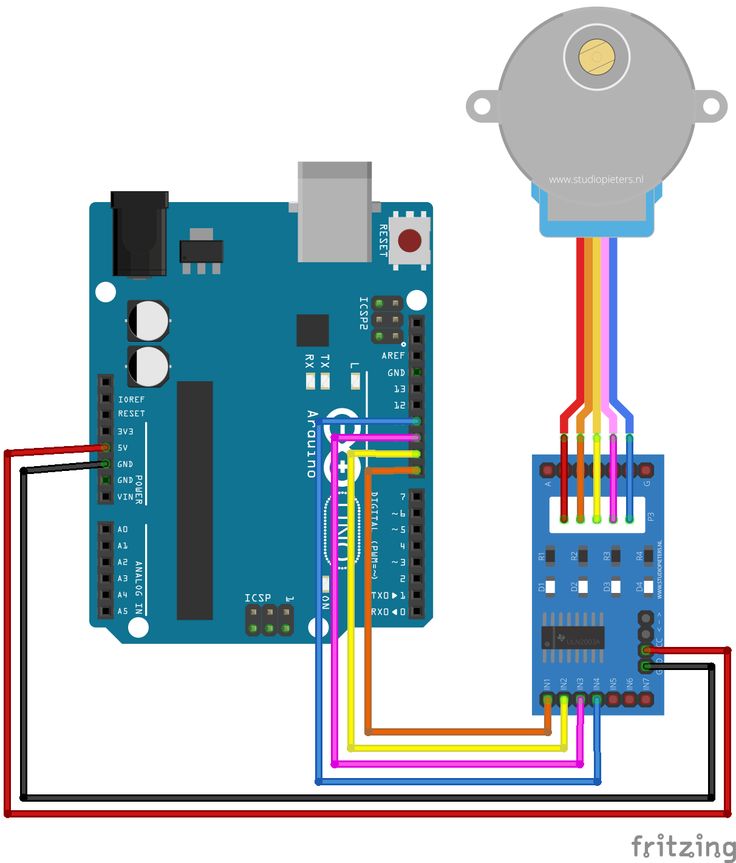
Плюсы
- Долгий срок службы
- Единая подвижная часть обеспечивает высокую надежность
- Конструкция с низким коэффициентом трения, обеспечивающая продолжительную работу на высоких скоростях
- Энергоэффективность
Минусы
- Требует специализированных систем управления
- Для оптимального использования двигателя, регулировать подачу питания
Запустить схему бесщеточного двигателя
Параметры для выбора двигателя Arduino
Выбор правильного двигателя для вашего проекта часто зависит от типа проекта, который вы пытаетесь построить, и от того, какие показатели производительности будут определять идеал мотор для вас. Есть три основных параметра, которые взаимозависимы и которые нам необходимо учитывать при выборе правильного двигателя для нашего проекта
Крутящий момент
Хотя в этой статье мы не будем углубляться в серьезную математику и физику, понимание номинального крутящего момента вашего двигателя и того, как он влияет на ваши решения при выборе двигателя для вашего проекта, важно, чтобы убедиться, что Вы выбираете двигатель, который соответствует вашим потребностям или ожиданиям.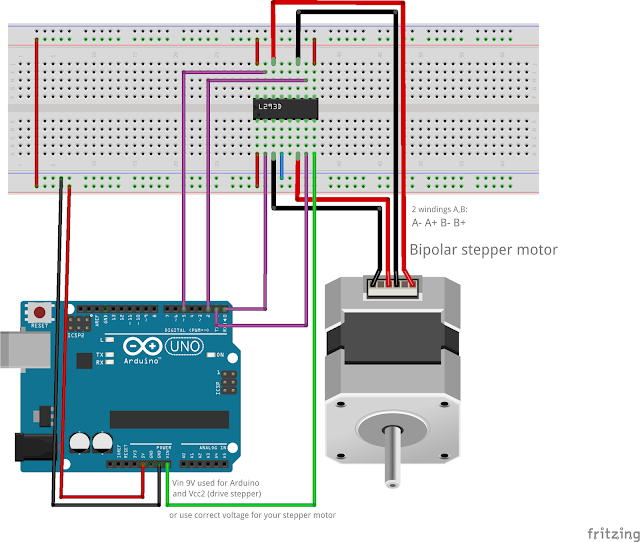
Проще говоря, номинальный крутящий момент двигателя — это сила вращения, которую двигатель способен оказывать на нагрузку. Крутящий момент определяется по простой формуле:
Крутящий момент = Расстояние от оси вращения X Сила
В качестве примера того, как крутящий момент влияет на ваши творения, мы можем рассмотреть другую область, где крутящий момент важен, — автомобильный сектор. При подъеме на холмы или крутые дороги предпочтительнее использовать двигатель с высоким крутящим моментом, так как он способен прикладывать большее усилие к грузу (автомобилю), позволяя ему двигаться в гору даже на низких скоростях или при трогании с места.
Высокий номинальный крутящий момент важен для поддержания высокой скорости вращения двигателя, например, в дроне. Двигатель с высоким крутящим моментом может быстро изменять значения оборотов, что должно привести к более плавной и более отзывчивой работе электромобиля, использующего такой двигатель. Хорошими вариантами для тех, кто ищет двигатели с высоким крутящим моментом, являются стандартные коллекторные двигатели постоянного тока, которые, хотя и дешевы, имеют более короткий срок службы и требуют большего обслуживания, или более дорогие, но более надежные и энергоэффективные бесщеточные двигатели постоянного тока.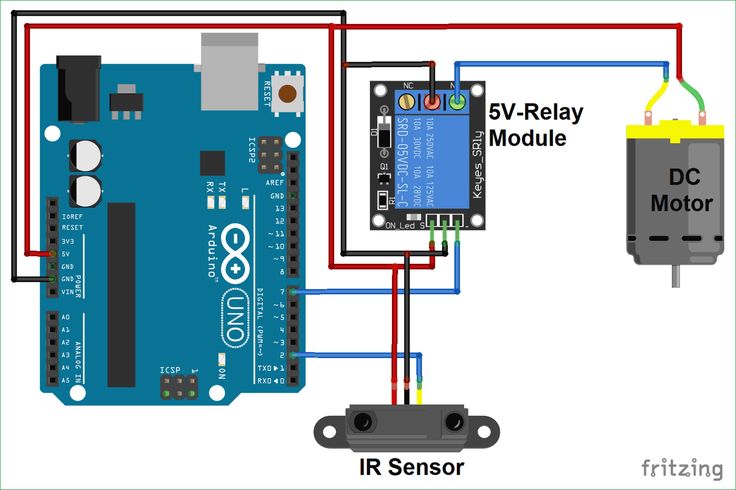
Поддержание номинального крутящего момента двигателей в соответствии с потребностями вашего творения важно для обеспечения долговременной работы, так как слишком низкий номинальный крутящий момент делает ваше творение неработоспособным, а слишком высокий крутящий момент может вызвать механическое напряжение во время работы. Хотя риск катастрофического отказа из-за чрезмерно высокого крутящего момента невелик, когда речь идет об электронике DIY, он все же может привести к более быстрому износу деталей и сокращению срока службы вашего нового изобретения.
Напряжение — скорость/об/мин
В данном контексте скорость — это скорость, с которой вращается электродвигатель. Эта угловая скорость вращения измеряется в оборотах в минуту или об/мин, и наряду с крутящим моментом являются двумя основными факторами, влияющими на работу двигателя. Проще говоря, если двигатель с высоким крутящим моментом хорош для перемещения более тяжелых грузов на низкой скорости, система привода с высокими оборотами позволит работать на более высоких скоростях при снижении общей грузоподъемности.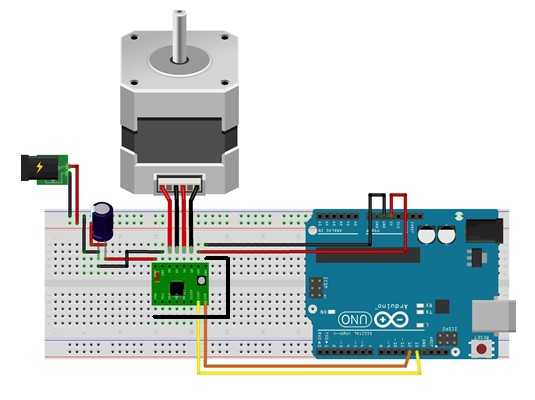
При добавлении двигателя Arduino в проект вам необходимо принять во внимание ваш источник питания (стену или батареи) и убедиться, что характеристики напряжения двигателя соблюдены, чтобы получить максимальную отдачу от него.
Для продвинутых строителей коробка передач, подобная используемой в обычных автомобилях, позволяет двигателям хорошо работать в обоих режимах по мере необходимости. Те из вас, кто водит машину, уже знают, что более низкие передачи дают достаточно крутящего момента, чтобы начать движение, но вам нужно быстро переключаться на 2-ю и 3-ю передачи, чтобы поддерживать ускорение. И если вы когда-нибудь пробовали трогаться с места на высокой передаче, скажем, на 4-й или 5-й на механической коробке передач, вы знаете, как высокие обороты без достаточного крутящего момента или инерционного момента ни к чему быстро не приведут.
В общем, бесколлекторный двигатель — отличный вариант для тех, кому нужен разумный крутящий момент, надежность и энергоэффективность даже при более высоких оборотах, но не интересует вес и сложность редуктора.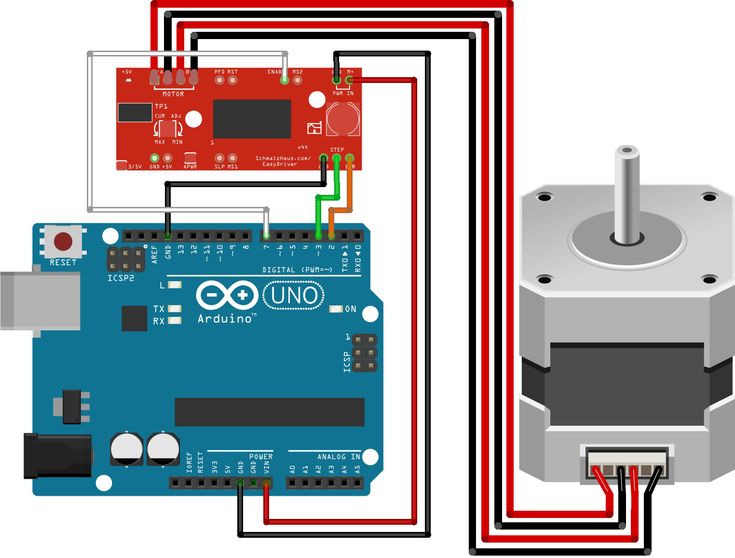
Сила тока/сила тока
При выборе электродвигателя важно выбрать тот, который способен обеспечить необходимую мощность, сохраняя при этом потребляемую мощность в допустимых пределах. Мощность (электроэнергия) – вольты х ампер. В то время как напряжение связано с увеличением оборотов двигателя, для увеличения крутящего момента также требуется более высокий номинальный ток. Имея мощный двигатель, рассчитанный на работу с высоким напряжением и силой тока, это приводит к более высоким требованиям к нагрузке по мощности.
Хотя это вряд ли повлияет на проекты, которые полагаются на электропитание от стенных розеток, проекты, предназначенные для большей портативности, такие как беспилотные транспортные средства, роботы и носимые устройства, должны будут учитывать требования к двигателям, поскольку для питания проекта потребуются батареи. настроить так, чтобы обеспечить достаточную мощность. По этой причине при разработке портативной электроники всегда предпочтение отдается двигателям, которые настолько малы, легки и эффективны, насколько это возможно, чтобы свести к минимуму потребляемую мощность и вес (как самого двигателя, так и размера источника питания, необходимого для его работы).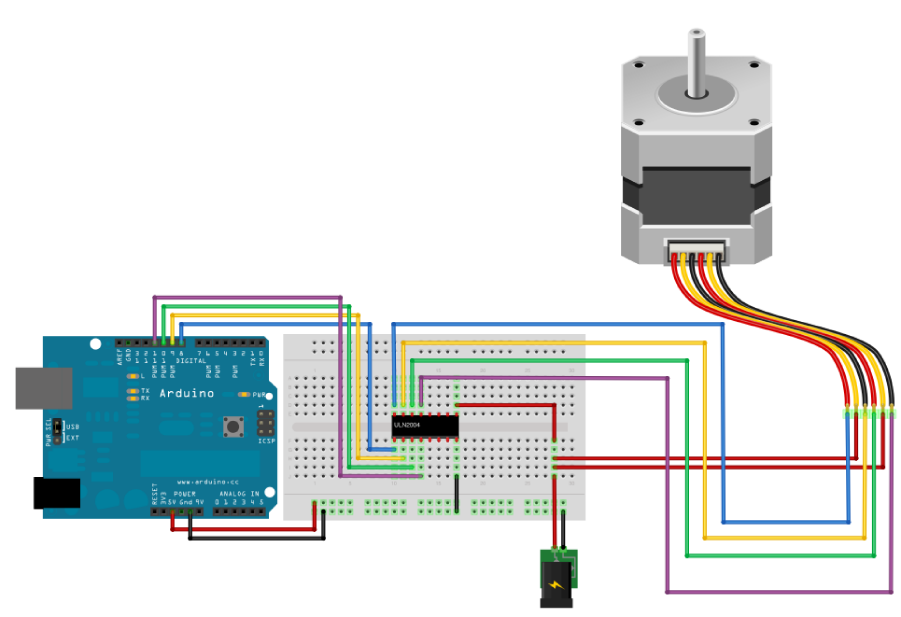 ).
).
Есть много других факторов, которые влияют на выбор правильного двигателя, но хорошего понимания этих трех основных критериев должно быть достаточно, чтобы направить вас в правильном направлении. Хотя теоретически любой электродвигатель может быть адаптирован для выполнения практически любой функции с некоторой изобретательностью, теперь у вас должно быть все необходимое, чтобы выбрать оптимальный двигатель/двигатели, которые лучше всего подходят для вашего проекта.
В следующем разделе мы рассмотрим практическое применение некоторых типов двигателей, которые мы обсуждали выше, в нескольких проектах, которые мы собрали здесь, на Circuito.io.
Примеры проектов двигателей Arduino
У нас всегда есть несколько интересных проектов, которые мы собираем здесь, на Circuito.io, и в этом разделе мы хотели выделить несколько наших проектов двигателей Arduino, в которых используются различные типы двигателей и действительно продемонстрируйте, что вы можете сделать с каждым из них.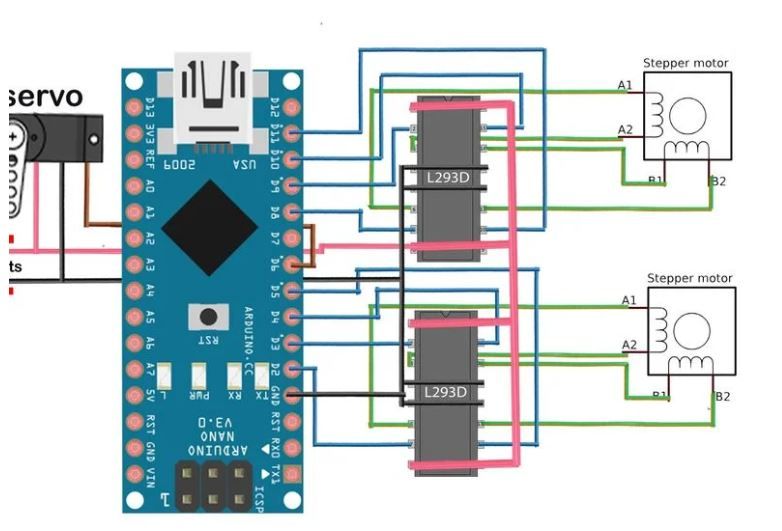
Название каждого проекта связано со страницей этого проекта, где вы можете узнать, как управлять различными двигателями, а также получить доступ к нашему инструменту для сборки, где вы можете быстро и легко изменить один из наших рекомендуемых проектов или даже создать свой собственный с нуля. .
Двигатель Arduino. Проект №1: кормушка для домашних животных IoT
Эта кормушка для домашних животных с подключением к Интернету идеально подходила для работы с одним серводвигателем, поскольку диапазон вращения, необходимый для раздачи корма, был ограничен. Использование серводвигателя здесь оказалось дешевым, компактным и простым в использовании решением, поскольку для его работы не требовалось никаких дополнительных деталей, требовалось минимальное электропитание и оно было надежным даже при длительном использовании.
Двигатель Arduino. Проект №2: Следящий за линией
Для следящего за линией робота мы использовали 2 стандартных коллекторных двигателя постоянного тока. Коллекторные двигатели — хороший выбор при сборке небольших колесных ботов, таких как этот, поскольку двигатель с редуктором обеспечивает высокий крутящий момент, прост в управлении и очень дешев.
Коллекторные двигатели — хороший выбор при сборке небольших колесных ботов, таких как этот, поскольку двигатель с редуктором обеспечивает высокий крутящий момент, прост в управлении и очень дешев.
Поскольку бот такой маленький и легкий, экономия энергии за счет перехода на бесщеточный двигатель постоянного тока на самом деле не требуется. Для этого проекта необходима дополнительная передача, чтобы преобразовать скорость двигателя постоянного тока в крутящий момент. При использовании двигателя постоянного тока кодирование довольно простое, а ускорение и скорость легко контролируются. Однако вам нужно будет создать отдельную систему привода, чтобы получать команды от Arduino и преобразовывать эти команды в электрические импульсы, известные как драйвер двигателя постоянного тока. Вам также может потребоваться поворотный энкодер или подобное устройство для преобразования обратной связи от двигателя в цифровую информацию, чтобы Arduino мог отслеживать свое собственное положение и прогресс.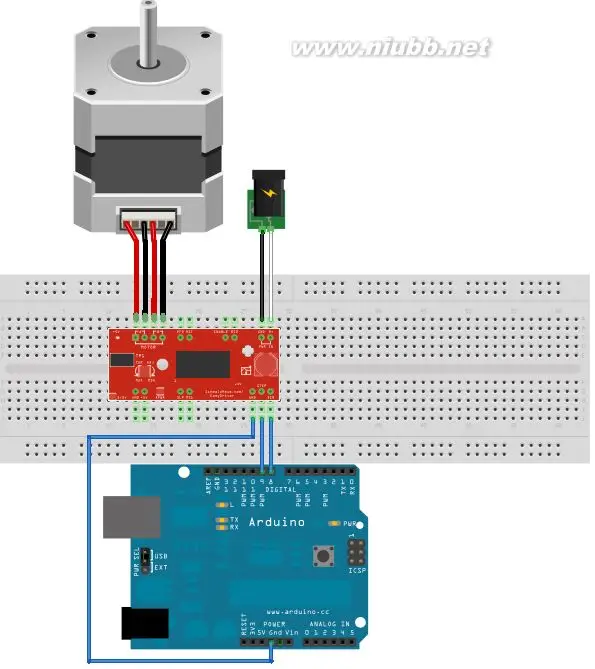
Проект двигателя Arduino №3: Роботизированная рука
Этот классический проект — один из лучших способов продемонстрировать серводвигатели Arduino в действии. Всего в роботизированной руке используется 3 серводвигателя, по одному на каждое сочленение руки, обеспечивающее необходимое срабатывание.
Поскольку этот робот-манипулятор работает по простой предварительно закодированной команде, а не активно обнаруживает объекты для взаимодействия в пределах досягаемости, этот проект идеально подходит для тех, кто плохо знаком с проектами двигателя Arduino, или даже для новичков, которые хотят начать работу с более сложной проект, в который они действительно могут вонзить свои зубы.
Важным фактором, который следует учитывать, является обеспечение достаточной мощности серводвигателей, которые вы используете, для эффективной работы в зависимости от предполагаемого размера манипулятора робота.
Двигатель Arduino Проект № 4: Мини-лифт с управлением через Bluetooth через Arduino
Здесь мы демонстрируем шаговый двигатель, предназначенный для подъема или опускания небольшого контейнера, который служит «автомобилем» подъемника.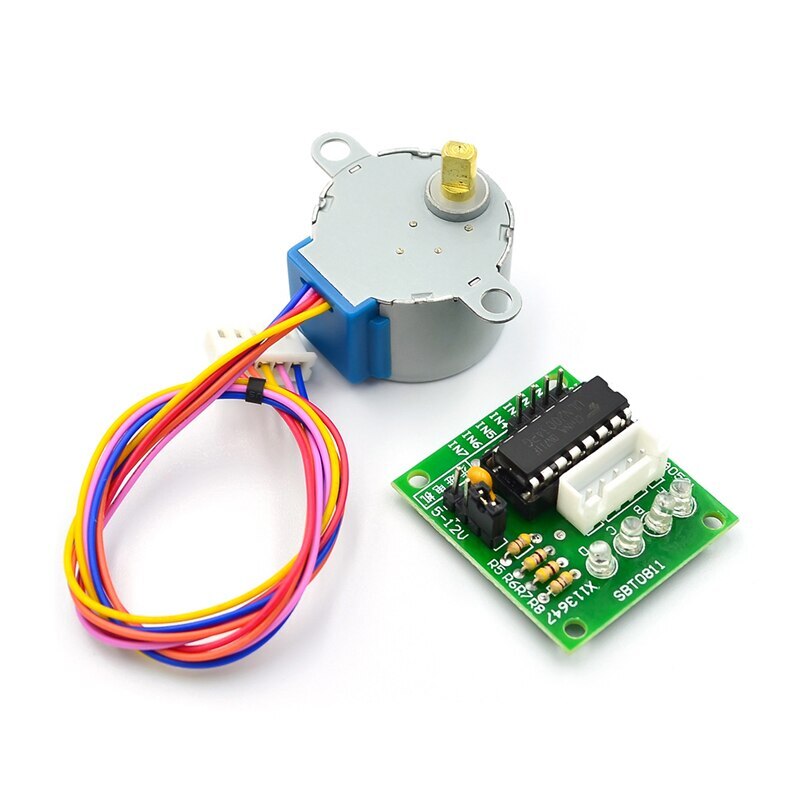 Двигатель был настроен так, чтобы он мог выдвигать автомобиль вниз, вращаясь в одном направлении, и извлекать его, вращая в противоположном направлении, пока «автомобиль» не вернется в исходное положение. Предварительно запрограммировав количество шагов вращения, необходимых для безопасного опускания «кабины» подъемника, система смогла управлять подъемником без заминок. Эта установка будет работать хорошо при условии, что вес груза в подъемнике не слишком велик, чтобы шаговый двигатель потерял тягу, что привело к пропуску шагов и нарушению надлежащего выравнивания. Одним из способов преодолеть эту неудачу и увеличить грузоподъемность было бы добавить к двигателю коробку передач для увеличения крутящего момента. В качестве альтернативы мы могли бы заменить шаговый двигатель стандартным коллекторным двигателем постоянного тока с редуктором; сочетая его естественно более высокий номинальный крутящий момент с дополнительным концевым выключателем, чтобы предоставить блоку управления Arduino информацию о положении, чтобы он мог измерять вращения и обеспечивать такой же контроль над подъемом, как и при использовании шагового двигателя.
Двигатель был настроен так, чтобы он мог выдвигать автомобиль вниз, вращаясь в одном направлении, и извлекать его, вращая в противоположном направлении, пока «автомобиль» не вернется в исходное положение. Предварительно запрограммировав количество шагов вращения, необходимых для безопасного опускания «кабины» подъемника, система смогла управлять подъемником без заминок. Эта установка будет работать хорошо при условии, что вес груза в подъемнике не слишком велик, чтобы шаговый двигатель потерял тягу, что привело к пропуску шагов и нарушению надлежащего выравнивания. Одним из способов преодолеть эту неудачу и увеличить грузоподъемность было бы добавить к двигателю коробку передач для увеличения крутящего момента. В качестве альтернативы мы могли бы заменить шаговый двигатель стандартным коллекторным двигателем постоянного тока с редуктором; сочетая его естественно более высокий номинальный крутящий момент с дополнительным концевым выключателем, чтобы предоставить блоку управления Arduino информацию о положении, чтобы он мог измерять вращения и обеспечивать такой же контроль над подъемом, как и при использовании шагового двигателя.
Начните свой собственный проект
Проект Arduino Motor #5:
Поворотный стол для фотографийПоворотный стол для фотографий — это проект, который мы давно хотели создать, поскольку нам нужно сделать 360 изображений компонентов, которые мы используем, и проектов, которые мы строить. Мы провели исследование в Интернете и увидели, что во многих проигрывателях используются серводвигатели, но мы подумали, что в этом случае серводвигатель не будет достаточно точным, поэтому решили использовать шаговый двигатель. Еще одним преимуществом шагового двигателя является более простое программирование — использование шагов двигателя для измерения расстояния между углами съемки.
Arduino Motor Project #6:
Аниматронный хвост И последнее, но не менее важное в нашем списке, это аниматронный хвост, одна из наших наиболее сложных конструкций и наше самое первое автономное моторизованное носимое устройство. Сборка состоит из 3-х серводвигателей, расположенных вокруг основания хвоста.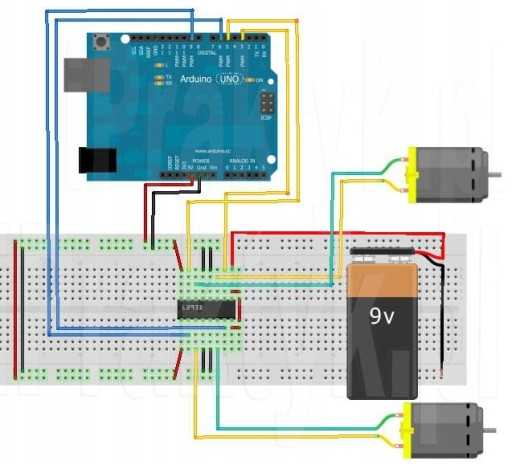
Поскольку мы хотели разместить сервоприводы близко к основанию, нам нужно было придумать способ обеспечить разнонаправленное движение без размещения сервоприводов в других шарнирах хвоста. Это было достигнуто за счет соединения каждого сервопривода со шкивом, который преобразовывал угловое вращательное движение серводвигателя в линейный эффект толкания / тяги на хвостовой части с помощью нитей, которые поддерживали натяжение между шкивом и хвостовой частью. В дополнение к запрограммированным движениям хвоста был также установлен джойстик, позволяющий оператору вручную управлять движением хвоста для более анимированных или подчеркнутых действий.
Сервоприводы, оснащенные металлическими шестернями для придания дополнительной прочности, располагались вокруг основания хвоста, позволяя ему двигаться влево и вправо, а также вверх и вниз. Хотя это творение было несколько сложным и требовало сложной сборки, за счет того, что все двигатели и батареи располагались близко к основанию хвоста, распределение веса было настолько хорошим, насколько мы могли надеяться, без батарей, двигателей или проводки, необходимых дальше в хвосте.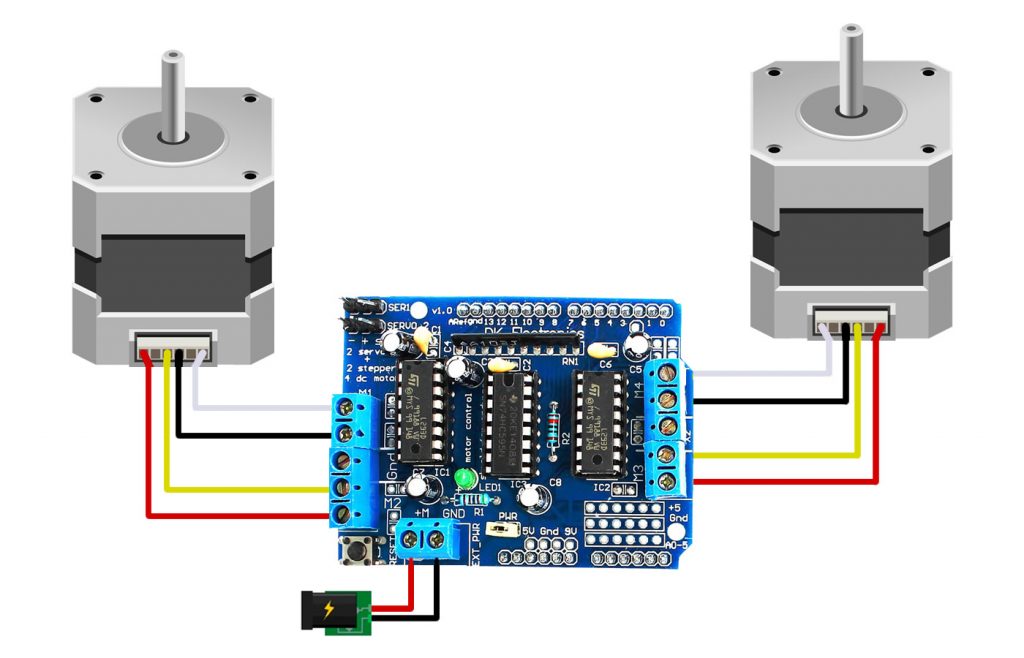 который оставался пустым и оставался хорошо сбалансированным и удобным в использовании.
который оставался пустым и оставался хорошо сбалансированным и удобным в использовании.
—
Хотя поначалу это может показаться сложным, выбрать правильный двигатель для вашего следующего творения Arduino на самом деле довольно просто, если вы понимаете, в чем заключается преимущество каждого типа двигателя; а также четкое понимание того, что вы ожидаете или требуете от выбранного вами двигателя с точки зрения мощности и крутящего момента, чтобы ваше творение функционировало эффективно.
Помимо требований к производительности, важно также учитывать другие факторы, такие как уровень вашего опыта и знакомство с определенными типами двигателей, а также их стоимость, при принятии решения о покупке или выборе нового творения. Если вы знакомы с определенным типом аппаратного обеспечения или у вас уже есть несколько моторов, может оказаться намного дешевле просто спроектировать свою сборку на основе того, что у вас есть под рукой или с чем вам удобно работать, а не использовать дополнительные моторы, что сэкономит вам деньги.
