Какие преимущества дает 32-битное ядро ARM в Arduino Due. Как правильно подключить и запитать плату Arduino Due. Какие интерфейсы и возможности предоставляет Arduino Due для разработки проектов. Как программировать Arduino Due и на что обратить внимание при работе с этой платой.
Общая характеристика Arduino Due
Arduino Due — это мощная плата микроконтроллера на базе 32-битного процессора Atmel SAM3X8E ARM Cortex-M3. Это первая плата Arduino с 32-битным микроконтроллером, что дает ей значительные преимущества по сравнению с 8-битными платами:
- Тактовая частота 84 МГц
- 96 КБ оперативной памяти
- 512 КБ флеш-памяти для программ
- Возможность выполнения 32-битных операций за 1 такт
- Контроллер DMA для эффективной работы с памятью
Эти характеристики делают Arduino Due отличным выбором для ресурсоемких проектов, требующих высокой производительности.
Особенности питания Arduino Due
В отличие от большинства плат Arduino, работающих от 5В, Arduino Due использует напряжение питания 3.3В. Это важно учитывать при подключении внешних компонентов и датчиков. Основные моменты по питанию платы:
- Рабочее напряжение: 3.3В
- Рекомендуемое входное напряжение: 7-12В
- Предельное входное напряжение: 6-20В
- Максимальный ток с вывода 3.3В: 800 мА
- Максимальный ток с вывода 5В: 800 мА
Питание может осуществляться через USB, внешний источник или батарею. При использовании внешнего источника рекомендуется напряжение 7-12В.
Входы и выходы Arduino Due
Arduino Due оснащена большим количеством цифровых и аналоговых входов/выходов:
- 54 цифровых входа/выхода
- 12 аналоговых входов с разрешением 12 бит
- 2 аналоговых выхода (ЦАП) с разрешением 12 бит
- 12 выходов с ШИМ
Цифровые выводы работают на напряжении 3.3В и могут обеспечивать ток до 3-15 мА на выходе или принимать 6-9 мА на входе. Некоторые выводы имеют дополнительные функции, например, поддержку интерфейсов UART, SPI, I2C (TWI).
Интерфейсы и коммуникационные возможности
Arduino Due предоставляет широкие возможности для связи с другими устройствами:
- 4 аппаратных последовательных порта UART
- Интерфейс SPI
- 2 интерфейса I2C (TWI)
- Интерфейс CAN (пока не поддерживается Arduino API)
- Нативный USB-порт
- Программируемый USB-порт
Это позволяет подключать к Arduino Due широкий спектр периферийных устройств и датчиков, а также обеспечивать связь с компьютером через USB.
Программирование Arduino Due
Программирование Arduino Due осуществляется через среду Arduino IDE. Однако есть некоторые особенности по сравнению с другими платами Arduino:
- Необходимо выбрать правильный порт для загрузки (Native USB Port)
- Поддерживаются расширенные возможности языка C++
- Доступны дополнительные библиотеки для работы с периферией SAM3X
- Возможно использование CMSIS для низкоуровневого программирования
При переносе проектов с 8-битных плат Arduino на Due может потребоваться адаптация кода, особенно в части работы с портами ввода-вывода.
Применение Arduino Due в проектах
Благодаря своей высокой производительности и богатому набору интерфейсов, Arduino Due отлично подходит для следующих типов проектов:
- Обработка аудио и видео в реальном времени
- Управление роботами и сложными механизмами
- Системы сбора и анализа данных
- Проекты с машинным обучением
- Создание музыкальных инструментов
- 3D-принтеры и ЧПУ-станки
Due особенно хорошо справляется с задачами, требующими быстрых вычислений или обработки больших объемов данных.
Сравнение Arduino Due с другими платами Arduino
По сравнению с популярными платами Arduino Uno и Mega, Due имеет следующие преимущества:- Значительно более высокая производительность
- Больший объем памяти
- Более высокое разрешение АЦП и ЦАП
- Наличие нативного USB-порта
- Поддержка CAN-интерфейса
Однако Due имеет и некоторые ограничения:
- Несовместимость по напряжению с 5В устройствами
- Более сложное программирование для начинающих
- Выше стоимость по сравнению с базовыми моделями
Выбор между Due и другими платами Arduino зависит от конкретных требований проекта.
Особенности работы с памятью в Arduino Due
Arduino Due предоставляет значительно больше памяти по сравнению с 8-битными платами Arduino:
- 512 КБ флеш-памяти для хранения скетчей
- 96 КБ SRAM для выполнения программ
- Дополнительные 512 КБ NAND флеш-памяти для хранения данных
Это позволяет создавать более сложные проекты с большими объемами кода и данных. Однако при работе с памятью нужно учитывать следующие моменты:
- Необходимость правильного выравнивания данных для 32-битного процессора
- Возможность использования DMA для эффективной работы с памятью
- Отличия в организации памяти по сравнению с AVR-микроконтроллерами
Для эффективного использования памяти в Arduino Due рекомендуется изучить особенности архитектуры ARM Cortex-M3.
Расширенные возможности Arduino Due
Arduino Due предоставляет ряд дополнительных возможностей, которые отсутствуют у большинства других плат Arduino:
- Аппаратное умножение и деление
- Поддержка операций с плавающей точкой
- Возможность создания многопоточных приложений
- Аппаратные таймеры и счетчики
- Расширенные возможности отладки через JTAG
Эти функции позволяют создавать более сложные и эффективные проекты на базе Arduino Due.
Экосистема и поддержка Arduino Due
Несмотря на то, что Arduino Due менее популярна, чем классические 8-битные платы, для нее доступен широкий спектр ресурсов и поддержки:
- Большое количество библиотек, совместимых с Due
- Активное сообщество разработчиков
- Обучающие материалы и примеры проектов
- Поддержка со стороны производителей датчиков и модулей
Это облегчает начало работы с Arduino Due и позволяет быстро находить решения возникающих проблем.
Перспективы развития Arduino Due
Хотя Arduino Due была выпущена несколько лет назад, она остается актуальной платформой для разработки сложных проектов. В будущем можно ожидать:

- Появления новых версий платы с улучшенными характеристиками
- Расширения поддержки в Arduino IDE и других средах разработки
- Создания новых библиотек, оптимизированных под архитектуру ARM
- Интеграции с современными технологиями IoT и машинного обучения
Arduino Due остается мощной платформой для создания инновационных проектов в области электроники и робототехники.
Начало работы с Arduino в Windows
Данный документ разъясняет, как подключить плату Arduino к компьютеру и загрузить ваш первый скетч.
- Необходимое железо — Arduino и USB-кабель
- Программа — среда разработки для Arduino
- Подсоедините плату
- Установите драйвера
- Запустите среду разработки Arduino
- Откройте готовый пример
- Выберите вашу плату
- Выберите ваш последовательный порт
- Загрузите скетч в Arduino
Необходимое железо — Arduino и USB-кабель
В этом руководстве предполагается, что вы используете Arduino Uno, Arduino Duemilanove, Nano или Diecimila.
Вам потребуется также кабель стандарта USB (с разъемами типа USB-A и USB-B): такой, каким, к примеру, подключается USB-принтер. (Для Arduino Nano вам потребуется вместо этого кабель с разъемами А и мини-В).


Программа – среда разработки для Arduino
Найдите последнюю версию на странице скачивания.
После окончания загрузки распакуйте скачанный файл. Убедитесь, что не нарушена структура папок. Откройте папку двойным кликом на ней. В ней должны быть несколько файлов и подкаталогов.
Подсоедините плату
Arduino Uno, Mega, Duemilanove и Arduino Nano получают питание автоматически от любого USB-подключения к компьютеру или другому источнику питания. При использовании Arduino Diecimila убедитесь, что плата сконфигурирована для получения питания через USB-подключение. Источник питания выбирается с помощью маленького пластикового джампера, надетого на два из трех штырьков между разъемами USB и питания. Проверьте, чтобы он был установлен на два штырька, ближайших к разъему USB.
Подсоедините плату Arduino к вашему компьютеру, используя USB-кабель. Должен загореться зеленый светодиод питания, помеченный PWR.
Установите драйвера
Установка драйверов для Arduino Uno на Windows7, Vista или XP:
- Подключите вашу плату и подождите, пока Windows начнет процесс установки драйвера. Через некоторое время, несмотря на все её попытки, процесс закончится безрезультатно.
- Нажмите на кнопку ПУСК и откройте Панель управления.
- В панели управления перейдите на вкладку Система и безопасность (System and Security). Затем выберите Система. Когда откроется окно Система, выберите Диспетчер устройств (Device Manager).
- Обратите внимание на порты (COM и LPT). Вы увидите открытый порт под названием «Arduino UNO (COMxx)».
- Щелкните на названии «Arduino UNO (COMxx)» правой кнопкой мышки и выберите опцию «Обновить драйвер» (Update Driver Software).
- Кликните «Browse my computer for Driver software».
- Для завершения найдите и выберите файл драйвера для Uno – «ArduinoUNO.inf», расположенный в папке Drivers программного обеспечения для Arduino (не в подкаталоге «FTDI USB Drivers»).
- На этом Windows закончит установку драйвера.
См. также: пошаговые скриншоты для установки Uno под Windows XP.
Установка драйверов для Arduino Duemilanove, Nano или Diecimila в Windows7, Vista или XP:
Когда вы подключите плату к компьютеру, Windows запустит процесс установки драйвера (если до этого вы не подключали к компьютеру плату Arduino).
В Windows Vista драйвер скачается и установится автоматически (это действительно работает!)
В Windows XP откроется Мастер установки нового оборудования (Add New Hardware wizard).
- На вопрос «Подключиться к узлу Windows Update для поиска программного обеспечения? (Can Windows connect to search for software?)» выберите ответ «Нет, не в этот раз (No, not this time)». Нажмите «Далее».
- Выберите «Установить из списка или указать местонахождение (Advanced) (Install from a list or specified location (Advanced))» и нажмите «Далее».
- Убедитесь, что выбрано «Искать наиболее подходящий драйвер в указанном месте (Search for the best driver in these locations)»; снимите флажок «Искать на съемных носителях (Search removable media)»; выберите «Добавить область поиска (Include this location in the search)» и укажите папку drivers/FTDI USB Drivers в дистрибутиве Arduino. (Последнюю версию драйвера можно найти на FTDI веб-сайте). Нажмите «Далее».
- Мастер начнет поиск и затем сообщит вам, что обнаружен «USB Serial Converter». Нажмите «Готово (Finish)».
- Снова появится мастер установки нового оборудования. Выполните все те же шаги с теми же опциями и указанием того же пути для поиска. На этот раз будет обнаружен «USB Serial Port».
Проверить, что драйвера действительно установлены можно, открыв Диспетчер устройств (Windows Device Mananger) (он находится во вкладке Оборудование(Hardware) панели Свойства системы(System)). Найдите «USB Serial Port» в разделе «Порты (Ports)» – это и есть плата Arduino.
Запустите среду разработки Arduino
Дважды щелкните на приложении для Arduino.
Откройте готовый пример
Откройте мгновенный пример скетча «LED» по адресу: File > Examples > 1.Basics > Blink.

Выберите вашу плату
Вам нужно выбрать пункт в меню Tools > Board menu, соответствующий вашей плате Arduino.
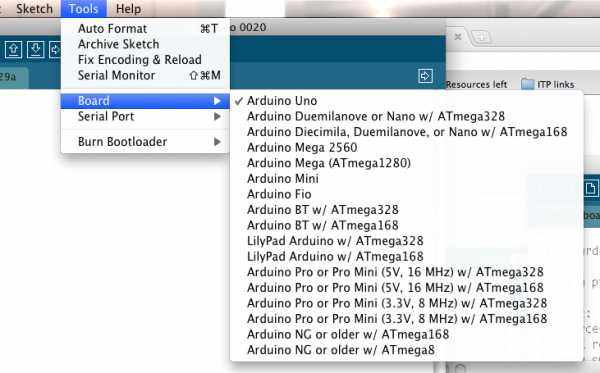
Выбор Arduino Uno
Для Duemilanove Arduinoплат с ATmega328 (проверьте на плате надпись на микросхеме) выберите Arduino Duemilanove или Nano с ATmega328. Вначале платы Arduino выпускались с ATmega168; для них выберите Arduino Diecimila, Duemilanove, или Nano с ATmega168. Подробно о пунктах меню платы можно прочитать на странице «Среда разработки».
Выберите ваш последовательный порт
Выберите устройство последовательной передачи платы Arduino из меню Tools | Serial Port. Вероятно, это будет COM3 или выше (COM1 и COM2 обычно резервируются для аппаратных COM-портов). Чтобы найти нужный порт, вы можете отсоединить плату Arduino и повторно открыть меню; пункт, который исчез, и будет портом платы Arduino. Вновь подсоедините плату и выберите последовательный порт.
Загрузите скетч в Arduino
Теперь просто нажмите кнопку «Upload» в программе – среде разработки. Подождите несколько секунд – вы увидите мигание светодиодов RX и TX на плате. В случае успешной загрузки в строке состояния появится сообщение «Done uploading (Загрузка выполнена)».
(Замечание. Если у вас Arduino Mini, NG или другая плата, вам необходимо физически кнопкой подать команду reset непосредственно перед нажатием кнопки «Upload»).
Несколько секунд спустя после окончания загрузки вы увидите как светодиод вывода 13 (L) на плате начнет мигать оранжевым цветом. Поздравляю, если это так! Вы получили готовый к работе Arduino!
arduino.ru
Программирование Arduino: справочник разработчика программиста
Главная
Программирование Ардуино – это задание определённых алгоритмов, переведённых на компьютерный язык, с целью выполнения машиной конкретной задачи, поставленной пользователем.
Мы предлагаем вам самый полный и дополняемый справочник программиста Arduino. Справочник постоянно дополняется и обновляется.
Ардуино – платформа, позволяющая множеству инженеров со всего мира создавать свои проекты с минимальными вложениями. В первую очередь – это специальный микроконтроллер с одноимённой системой управления и библиотеками, построенными на языке С++. Соответственно, если вы планируете создавать что-то уникальное, вам следует изучить все нюансы, которые имеет программирование Arduino.
Давайте же составим краткое описание программирования Arduino и уточним моменты, на которые стоит обратить внимание, если вы впервые занимаетесь подобным.
Основы Arduino
Прежде чем приступать к решению конкретной задачи на Ардуино, лучше всего иметь базис в сфере программирования. Поэтому давайте рассмотрим, что вообще обозначает этот термин. Абсолютно любой проект построен на поэтапной блок-модели, в которой описывается, что необходимо сделать вашему микроконтроллеру и как это сделать.
Для упрощения работы пользователей в Ардуино созданы готовые библиотеки функций, вам достаточно лишь вводить команды из них, чтобы добиться какой-то цели. Естественно, таким образом вы многого не добьётесь, но для создания собственных библиотек потребуется знание языка С++ на котором и построена прошивка чипа.
Ключевая особенность системы в том, что характеристики Arduino могут быть улучшены с помощью докупаемых компонентов, и вы всегда можете их подстроить под конкретный проект. Соответственно, единственным вашим ограничением является знание языка и его возможностей, а также собственная фантазия.
Все функции строятся из простейших операнд, которые характерны для С++. Этими операндами являются переменные различных типов и способы их применения. Поэтому любая функция, используемая в микроконтроллере для получения сведений или отправки сигнала, – это набор простейших операций, который записан в главной библиотеке. И вы будете ограничены до тех пор, пока не получите достаточно опыта и практики, чтобы понимать, какую библиотеку и для какой цели вам стоит написать.
Главный же недостаток конструирования с Arduino сложных проектов в том, что вам придётся с нуля писать код и подбирать компоненты для системы, поэтому лучше сначала попрактиковаться на простейших задачах.
Также, учитывайте, что язык написания библиотек системы – низкоуровневый, а соответственно, состоит из простейших команд, в отличие от высокоуровневых python или pascal, удобных для пользователей. С другой стороны, он также является мультипарадигмальным, поэтому подходит для решения любой задачи с помощью удобной вам парадигмы программирования.
Чаще всего применяется ООП. Сам С++ имеет ядро из многочисленных библиотек и дополнительных функций или методов, поэтому, если вы собираетесь разобраться во всём кардинально, стоит начинать с освоения языка с нуля.
Особенности Arduino программирования
Именно язык, на котором базируется система, и является главной особенностью Ардуино программирования. Ведь при том, что сама плата и работа с ней достаточно просты, с низким порогом вхождения, чтобы освоить низкоуровневый язык программирования и в совершенстве владеть им, потребуется несколько лет.
У программирования на Ардуино имеются как свои достоинства, так и недостатки, и вам стоит изучить обе стороны вопроса, чтобы понимать, с чем вы имеете дело и чего ожидать от микроконтроллера в принципе, во время работы с ним. Среди достоинств Ардуино, пользователи отмечают:
- Низкий порог вхождения. Этот пункт будет и в недостатках, так как из-за простоты системы и отсутствия требований к базису по программированию в сети гуляет множество библиотек, написанных ужасным образом. На то, чтобы разобраться, как они работают, уйдёт больше времени, чем на создание своей собственной. А стандартных функций от разработчиков не хватает для серьёзных задач.
- Обширное комьюнити. Это главное достоинство Ардуино перед его конкурентами, ведь вы найдёте пользователей, занимающихся созданием проектов на нём, как русскоязычных, так и англоязычных. Но если вы хотите получать действительно ценные советы и погрузиться в работу комьюнити, следует всё же изучить английский язык. Так как большая часть проблем, что вам встретятся, уже давно решены в Гугле, но, зачастую, ответы на английском.
- Большое количество библиотек, под разные случаи. Но, как уже описано чуть выше, у этого есть и свои недостатки.
Имеется у программирования на Ардуино и ряд весомых минусов:
- Низкая планка для вхождения превращает большую часть библиотек, коими наполнена сеть, в полностью бесполезный мусор. Ведь какие-то из них работают просто медленно и написаны без каких-либо знаний основ алгоритмизации, а часть – вовсе не работает, и непонятно, зачем авторы их создавали. Чтобы найти подспорье под конкретный проект, необходимо перелопатить несколько англоязычных форумов или же самостоятельно создать функции с нуля.
- Сложности программирования на С++. На деле – это один из сложнейших языков мультипарадигмального программирования, для создания прошивок и низкоуровневых задач. Однако, если вы имели опыт работы с ним и знаете хотя бы основные алгоритмы, а также работали хоть с одним другим мультипарадигмальным ЯП, тем более используя объектно-ориентированное программирование, вам будет значительно проще освоиться.
- Низкая скорость отклика самих чипов и их слабые характеристики. Да, микроконтроллеры Ардуино можно подстраивать под конкретную задачу, докупать компоненты и датчики, но это играет с ними злую шутку. Так как разработчики не знают, для чего будут использовать их детище, они усредняют все показатели, чтобы значительно уменьшить стоимость конечного продукта. В результате люди, создающие простейшие поделки, переплачивают за ненужную мощность, а тем, кто занимается робототехникой или автоматизацией каких-то процессов, приходится докупать и паять множество дополнительных плат.
Как вы можете заметить, Ардуино имеет множество нюансов, и не столь дружелюбна для новичков, как выглядит на первый взгляд. С другой стороны, если вы имеете малейший опыт работы с языками программирования, вам будет куда проще освоиться.
Как начать правильно пользоваться Arduino
Если вы никогда ранее не программировали, и это ваш первый опыт, то программирование микроконтроллеров Arduino пойдёт куда проще, если вы начнёте с основ. Конечно, когда в планах у вас нет никаких сложных проектов, можете работать на готовых библиотеках и параллельно разбирать, из чего состоят их функции. Это один из хороших способов обучения, но тогда стоит искать наборы функций, которые писались профессионалами, чтобы быть уверенным в их правильности. Иначе вы можете увидеть неправильное решение задачи и, в результате, применять те в своих проектах.
Но куда лучше начать с основ и посвятить хотя бы неделю освоению алгоритмизации и научиться разбивать свои проекты на блоки, а те – уже на конкретные шаги. Подобное построение блок-схем вам не раз пригодится в будущем. Когда вы изучите весь базис, можно переходить к практике и самообучению на С++, подойдут любые простейшие проекты или заготовленные в интернете задачи. На этом этапе вашей целью станет понять основные парадигмы и научиться их использовать, а также изучить возможности языка, чтобы вы чётко знали, что он может, и могли здраво оценить реализуемость ваших проектов.
Программирование микроконтроллеров
Само программирование Ардуино делится на три этапа:
- Создание или скачивание готовой библиотеки функций.
- Загрузка этих библиотек в постоянную память чипа. Это ещё называют прошивкой.
- Ввод этих функций в командную строку, например, АТ, чтобы плата выполнила те или иные действия.
Если вы делаете что-то простое, и вам хватает базовой прошивки, можете пропустить первые два пункта.
Самые простые проекты с использованием Arduino
Примеров простых проектов с Ардуино множество, например, вы можете:
- Создать датчик освещённости, который будет подстраивать специальные LED лампы под ту яркость, которая необходима в комнате.
- Автоматизация любых вещей в вашем доме. Например, включения-выключения света, открытия дверей и прочее.
- Автоматизация оранжереи.
Хотя это и звучит достаточно страшно, на большую часть этих проектов, благодаря обилию информации по ним в интернете, вы не потратите много времени и сил.
arduinoplus.ru
Arduino Due (дополнено) | Аппаратная платформа Arduino
 |
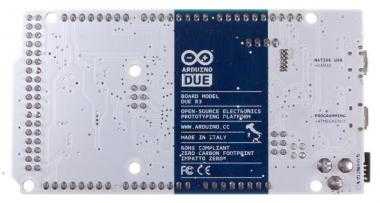 |
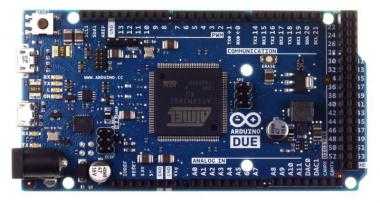
| Arduino Due, вид спереди | Arduino Due, вид сзади |
Общие сведения
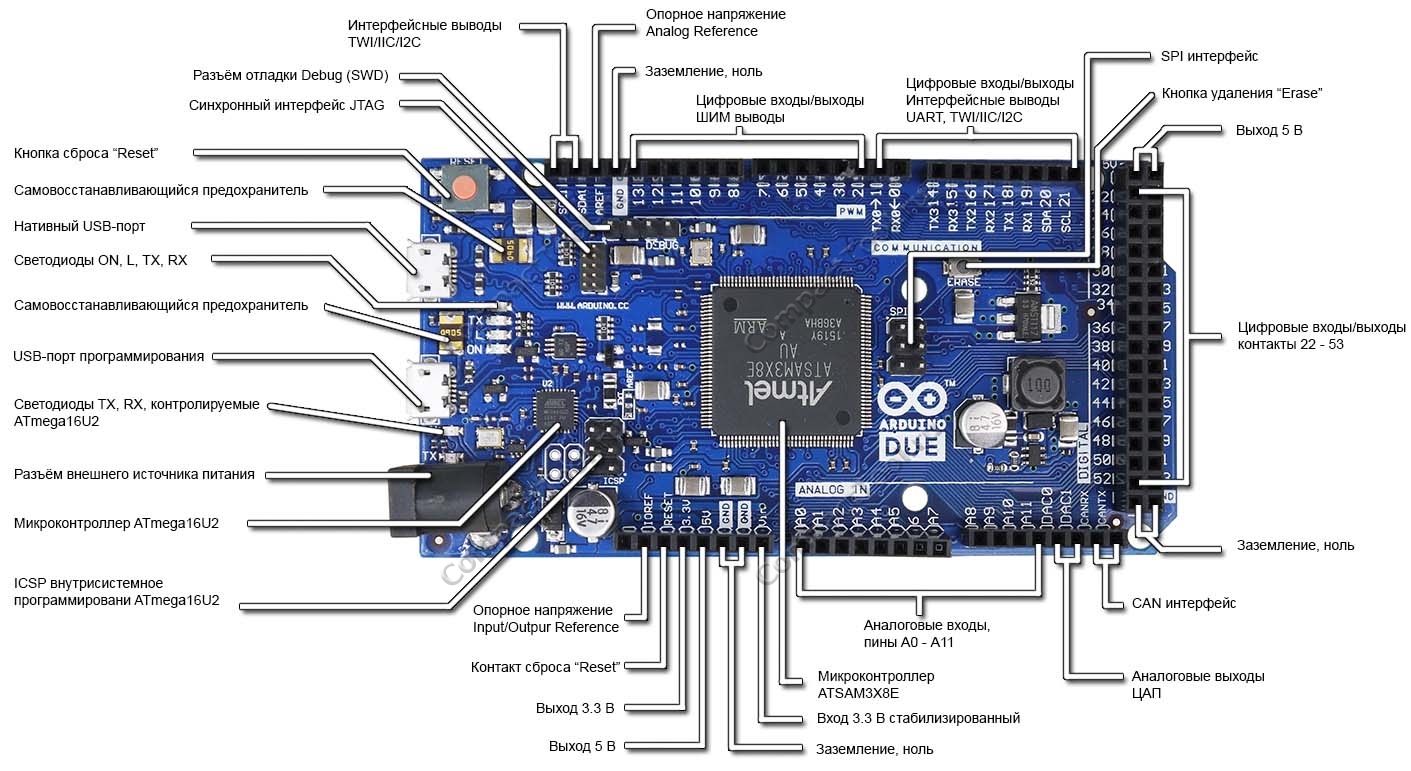
Arduino Due — плата микроконтроллера на базе процессора Atmel SAM3X8E ARM Cortex-M3 (описание). Это первая плата Arduino на основе 32-битного микроконтроллера с ARM ядром. На ней имеется 54 цифровых вход/выхода (из них 12 можно задействовать под выходы ШИМ), 12 аналоговых входов, 4 UARTа (аппаратных последовательных порта), a генератор тактовой частоты 84 МГц, связь по USB с поддержкой OTG, 2 ЦАП (цифро-аналоговых преобразователя), 2 TWI, разъем питания, разъем SPI, разъем JTAG, кнопка сброса и кнопка стирания.
Внимание! В отличие от других плат Arduino, Arduino Due работает от 3,3 В. Максимальное напряжение, которое выдерживают вход/выходы составляет 3,3 В. Подав более высокое напряжение, например, 5 В, на выводы Arduino Due, можно повредить плату.
Плата содержит все, что необходимо для поддержки микроконтроллера. Чтобы начать работу с ней, достаточно просто подключить её к компьютеру кабелем микро-USB, либо подать питание с AC/DC преобразователя или батарейки. Due совместим со всеми платами расширения Arduino, работающими от 3,3 В, и с цоколевкой Arduino 1.0.
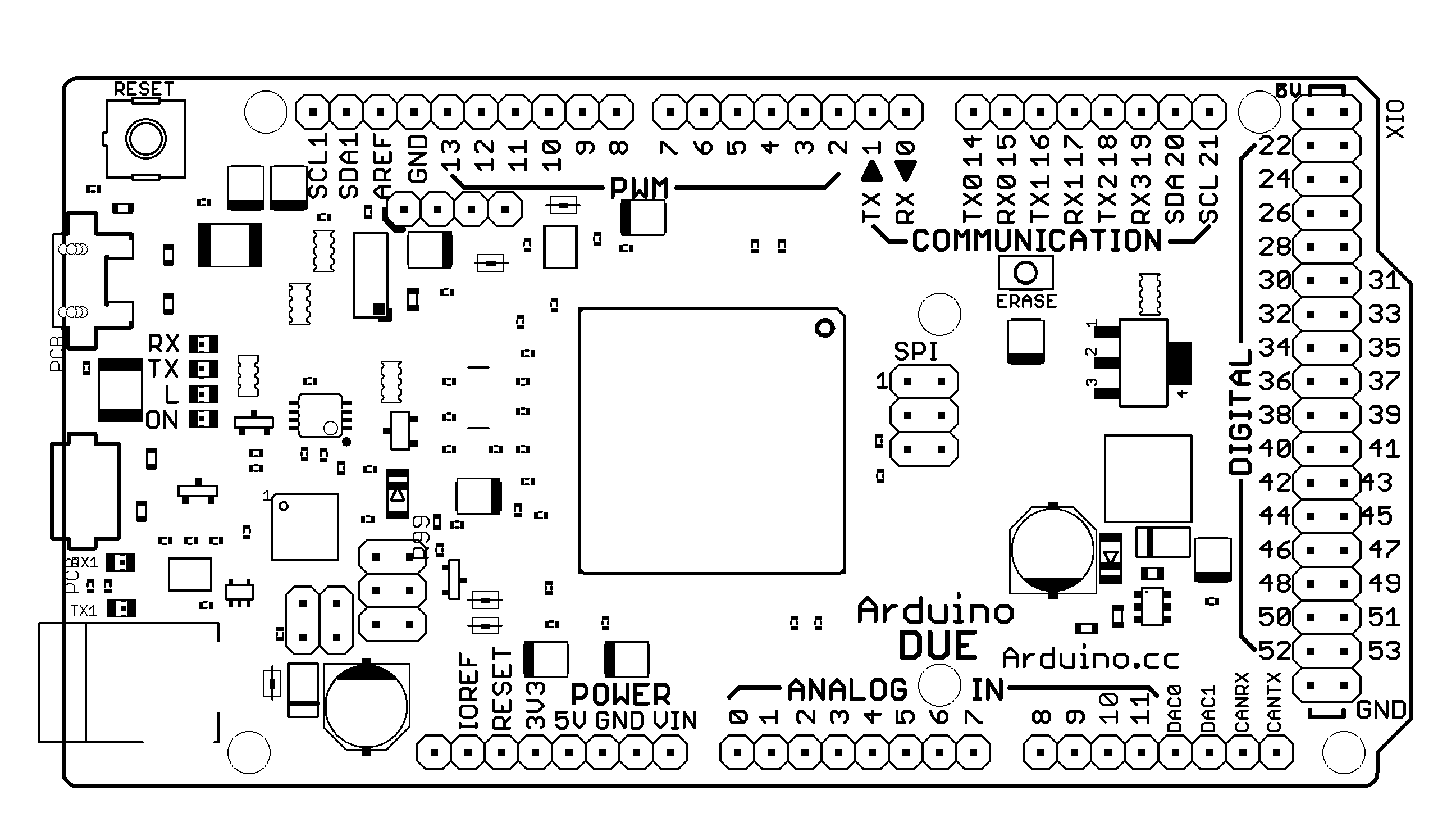
Расположение выводов Due повторяет цоколевку Arduino 1.0:
- TWI: Выводы SDA и SCL расположены рядом с выводом AREF.
- Вывод IOREF, который позволяет с помощью правильной конфигурации адаптировать присоединенную плату расширения к напряжению, выдаваемому Arduino. Благодаря этому платы расширения могут быть совместимы и с 3,3-вольтовыми платами типа Due и с платами на базе AVR, работающими от 5 В.
- Неподключенные выводы, зарезервированные для использования в будущем.
Преимущества ядра ARM
На Due установлено 32-битное ARM ядро, превосходящее по производительности обычные 8-битные микроконтроллеры. Наиболее значимые отличия:
32-битное ядро, позволяющее выполнять операции с данными шириной 4 байта за 1 такт (более подробную информацию смотри на странице int type).
- частота процессора (CPU) 84 МГц.
- 96 КБ ОЗУ.
- 512 КБ флеш-памяти для хранения программ.
- контроллер DMA, который разгружает центральный процессор от выполнения интенсивных операций с памятью.
Схема, исходные данные и расположение выводов
Файлы EAGLE: arduino-Due-reference-design.zip
Схема: arduino-Due-schematic.pdf
Расположение выводов: SAM3X Pin Mapping page
Характеристики
|
Микроконтроллер |
AT91SAM3X8E |
|
Рабочее напряжение |
3,3 В |
|
Входное напряжение (рекомендуемое) |
7-12 В |
|
Входное напряжение (предельное) |
6-20 В |
|
Цифровые Входы/Выходы |
54 (на 12 из которых реализуется выход ШИМ) |
|
Аналоговые входы |
12 |
| Аналоговые выходы | 2 (ЦАП) |
|
Общий выходной постоянный ток на всех входах/выходах |
50 мА |
| Постоянный ток через вывод 3,3 В | 800 мА |
| Постоянный ток через вывод 5 В | 800 мА |
| Флеш-память | 512 КБ доступно всего для пользовательских приложений |
| ОЗУ | 96 КБ (два банка: 64 КБ и 32 КБ) |
| Тактовая частота | 84 МГц |
Питание
Питание Arduino Due может осуществляться через USB соединитель или с помощью внешнего источника питания. Выбор источника питания выполняется автоматически.
Внешним (не USB) источником питания может быть либо AC/DC преобразователь («wall wart» — адаптер в одном корпусе с вилкой), либо батарея. Адаптер подключается к разъему питания платы 2,1 мм штепсельной вилкой с центральным положительным контактом. Выводы батареи подключаются к контактам Gnd и Vin разъема POWER. Плата может функционировать при внешнем питании от 6 до 20 В. Но если напряжение питания опускается ниже 7 В, на выводе 5 В может оказаться меньше пяти вольт, и плата будет работать нестабильно. Если же подается напряжение более 12 В, может перегреться стабилизатор напряжения, что приведет к повреждению платы. Рекомендуемый диапазон напряжений – от 7 до 12 В.
Ниже перечислены выводы питания:
- VIN. Это входное напряжение для платы Arduino, когда она питается от внешнего источника питания (в противоположность 5 вольтам, поступающим через USB соединение или от иного регулируемого источника питания). Напряжение питания может подаваться на этот вывод, или сниматься с этого вывода в случае питания через разъем питания.
- 5V. Данный вывод служит выходом регулируемого напряжения 5 В со встроенного стабилизатора на плате. Сама плата может питаться через разъем питания постоянного тока (7-12 В), либо через USB соединитель (5 В), либо через вывод VIN на плате (7-12V). Питающее напряжение через выводы 5 В и 3,3 В подается в обход стабилизатора и может повредить вашу плату. Мы не советуем так делать.
- 3.3V. Питание 3,3 В, вырабатываемое встроенным стабилизатором. Максимальный выходной ток 800 мА. Стабилизатор также обеспечивает питание микроконтроллера SAM3X.
- GND. Земляные выводы.
- IOREF. Данный вывод платы Arduino обеспечивает опорное напряжение, при котором работает микроконтроллер. Верно сконфигурированная плата расширения может считать напряжение на выводе IOREF и выбрать соответствующий источник питания, или разрешить использование выходных преобразователей напряжения для работы с 5 В или 3,3 В.
Память
Флеш-память SAM3X составляет 512 КБ (2 блока по 256 КБ) для хранения программ. Загрузчик (бутлодер) записывается Atmel при производстве и хранится в специально отведенном для него ПЗУ. Доступный объем ОЗУ составляет 96 КБ в двух смежных банках – 64 КБ и 32 КБ. Вся доступная память (флеш-память, ОЗУ и ПЗУ) может адресоваться напрямую как плоское адресное пространство.
Существует возможность стереть флеш-память SAM3X с помощью встроенной кнопки стирания. При этом из микропроцессора удалится текущая загруженная программа. Для стирания нажмите и несколько секунд удерживайте кнопку стирания при включенном питании платы.
Входы и Выходы
-
Цифровые входы/выходы: выводы с 0 по 53
Каждый из 54 цифровых выводов Due может использоваться в качестве входа или выхода, с помощью функций pinMode(), digitalWrite() и digitalRead(). Выводы работают от 3,3 В. Каждый вывод может выдавать (как источник) ток 3 мА или 15 мА, в зависимости от вывода, или получать (как приемник) ток 6 мА или 9 мА, в засимости от вывода. На них также имеются внутренние нагрузочные резисторы (по умолчанию они отключены) номиналом 100 кОм. Кроме этого, некоторым выводам назначены специализированные функции: - Последовательная линия: 0 (RX) и 1 (TX)
- Последовательная линия 1: 19 (RX) и 18 (TX)
- Последовательная линия 2: 17 (RX) и 16 (TX)
-
Последовательная линия 3: 15 (RX) и 14 (TX)
Эти выводы используются для приема (RX) и передачи (TX) последовательных данных TTL (с уровнем 3,3 В). Выводы 0 и 1 соединены с соответствующими выводами последовательного контроллера ATmega16U2 USB-to-TTL. -
ШИМ: выводы с 2 по 13
На них реализуется 8-битный выход ШИМ с помощью функции analogWrite(). Разрешение ШИМ можно менять, используя функцию analogWriteResolution(). -
SPI: разъем SPI (разъем ICSP на других платах Arduino)
Данные выводы служат для связи по SPI с использованием библиотеки SPI. Сигналы SPI выведены на центральный 6-контактный разъем, который физически совместим с Uno, Leonardo и Mega2560. Разъем SPI можно использовать только для связи с другими устройствами SPI, но не для программирования SAM3X по технологии внутрисхемного последовательного программирования (ICSP). SPI на Due также имеет расширенные функции, доступные при использовании Расширенных методов SPI для Due. -
CAN: CANRX и CANTX
На этих выводах поддерживается протокол связи CAN, но пока его не поддерживают программные интерфейсы (API) Arduino. -
«L» LED: 13
Встроенный светодиод, подключенный к цифровому выводу 13. При высоком уровне сигнала на данном выводе, светодиод включается, при низком – выключается. Возможно также убавить яркость светодиода, поскольку вывод 13 одновременно является выходом ШИМ. - TWI 1: 20 (SDA) и 21 (SCL)
-
TWI 2: SDA1 и SCL1
На данных выводах с использованием библиотеки Wire поддерживается связь по TWI. -
Аналоговые входы: выводы с A0 по A11
Плата Arduino Due имеет 12 аналоговых входов, каждый из которых может обеспечить разрешение 12 бит (т.е. 4096 различных значений). По умолчанию установлено разрешение 10 бит для совместимости с другими платами Arduino. Разрешение АЦП можно менять при помощи функции analogReadResolution(). Аналоговые ходы Due производят измерения от уровня земли до максимального значения 3,3 В. Приложение к этим выводам напряжения свыше 3,3 В вызовет повреждение кристалла SAM3X. Функция analogReference() на Due игнорируется.
Вывод AREF подключен к аналоговому выводу опорного напряжения SAM3X через резисторный мост. Для активации вывода AREF необходимо отпаять с печатной платы резистор BR1. -
DAC1 и DAC2
На выводах ЦАП DAC1 и DAC2 предоставляются достоверные аналоговые выходы с 12-битным разрешением (4096 уровней) при помощи функции analogWrite(). Данные выводы можно использовать для создания аудиовыхода, используя при этом библиотеку Audio.
Другие выводы:
-
AREF
Опорное напряжение для аналоговых входов. Используется с функцией analogReference(). - Reset
- По низкому уровню на этой линии происходит сброс микроконтроллера. Типичное применение вывода Reset – добавление кнопки сброса на плату расширения, которая перекрывает эту кнопку на микроконтроллере.
Связь
В Arduino Due есть ряд средств для взаимодействия с компьютером, платами Arduino и другими микроконтроллерами, а также различными устройствами, такими как телефоны, планшеты, фотокамеры и т.п. SAM3X имеет один аппаратный UART и три аппаратных USARTа для последовательной связи TTL-уровня (3,3 В).
Порт программирования соединен с ATmega16U2, предоставляющей виртуальный COM порт для программ на подключенном компьютере. (Для определения этого устройства компьютеру с ОС Windows потребуется файл .inf, на машинах же с OSX и Linux плата автоматически будет распознана как COM порт). Чип 16U2 также соединен с аппаратным UARTом SAM3X. Последовательная шина на выводах RX0 и TX0 предоставляет преобразование Serial-to-USB для программирования платы через микроконтроллер ATmega16U2. В программное обеспечение Arduino входит монитор последовательной шины, который дает плате возможность отправлять и принимать простые текстовые сообщения. Светодиоды RX и TX на плате будут мигать, когда идет передача данных через кристалл ATmega16U2 и через USB подключение к компьютеру (но не во время последовательного обмена по выводам 0 и 1).
Собственный USB порт (Native USB port) подключен к SAM3X. Это позволяет осуществлять последовательную связь (CDC) посредством USB. Таким образом обеспечивается подключение к монитору последовательной шины, или другим приложениям на вашем компьютере. Также это дает Due возможность эмулировать для присоединенного компьютера USB мышь или клавиатуру. Для использования этих возможностей смотрите справочные страницы Библиотека мыши и клавиатуры.
Собственный USB порт может также работать как USB хост для подключенных периферийных устройств: мыши, клавиатуры и смартфотонов. Чтобы использовать эти свойства, обратитесь к справочным страницам USB хост.
Контроллер SAM3X поддерживает, кроме того, связь по интерфейсам TWI и SPI. Программное обеспечение Arduino включает в себя библиотеку Wire для облегчения работы с шиной TWI; смотрите более детальное описание в документации. Для связи через SPI воспользуйтесь библиотекой SPI.
Программирование
Arduino Due можно запрограммировать с помощью программных средств Arduino (скачать). Более детальная информация содержится в справочнике.
Загрузка программ для SAM3X отличается от таковой для микроконтроллеров AVR, находящихся на других платах Arduino, поскольку необходимо стереть флеш-память перед тем как перепрограммировать её. Загрузка в кристалл управляется из ПЗУ контроллера SAM3X и запускается, только когда флеш-память кристалла пуста.
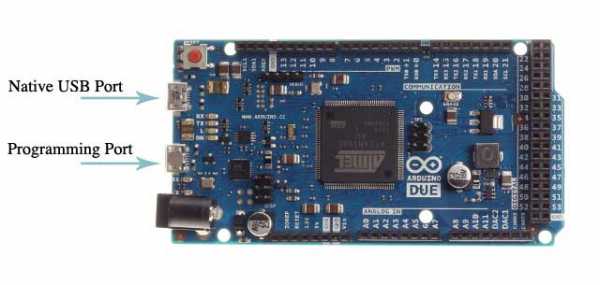
Плату можно программировать через оба USB порта, хотя рекомендуется использовать порт программирования, в связи с тем, что он поддерживает стирание кристалла:
- Порт программирования: Для использования этого порта выберите в Arduino IDE в качестве вашей платы «Arduino Due (Programming Port)». Подключите порт программирования платы Due (ближайший к разъему питания постоянного тока) к вашему компьютеру. Порт программирования использует микросхему 16U2 в качестве преобразователя USB-to-serial, соединенный с первым UARTом контроллера SAM3X (RX0 и TX0). Два вывода 16U2 подключены к выводам Reset и Erase SAM3X. Открытие и закрытие порта программирования, подключенного на скорости передачи 1200 бит в секунду, запускает процедуру «аппаратного стирания» чипа SAM3X, активирование выводов Erase и Reset на SAM3X перед установлением связи с UART. Это рекомендуемый порт для программирования Due. Аппаратное стирание более надежно, чем «программное стирание», которое происходит на собственном USB порте, и будет работать даже в случае повреждения главного микропроцессора.
- Собственный порт: Чтобы использовать этот порт, выберите в Arduino IDE тип вашей платы «Arduino Due (Native USB Port)». Собственный USB порт подсоединен напрямую к SAM3X. Подключите собственный USB порт Arduino Due (ближний к кнопке Reset) к вашему компьютеру. Открытие и закрытие собственного порта при скорости передачи 1200 бит в секунду запускает процедуру «программного стирания»: флеш-память стирается и плата перезапускается с помощью загрузчика. Если главный микроконтроллер по какой-либо причине поврежден, то, вероятно, программное стирание не будет работать, так как эта процедура на SAM3X происходит полностью программно. Открытие и закрытие собственного порта на других скоростях передачи не вызовет сброса SAM3X.
В отличие от других плат Arduino, использующих для загрузки avrdude, Due полагается на bossac.
Исходный код программы для ATmega16U2 доступен в архиве Arduino. К разъему ISP можно подключать внешний программатор (перезаписывая загрузчик DFU). Более подробную информацию можно найти в инструкциях для помощи пользователям.
Токовая защита разъема USB
На Arduino Due имеется самовосстанавливающийся предохранитель, назначение которого – защитить USB порты вашего компьютера от короткого замыкания и перегрузки по току. Несмотря на то, что в большинстве компьютеров есть встроенная защита по току, этот предохранитель дает дополнительную защиту. При токе через USB порт более 500 мА связь автоматически обрывается предохранителем до прекращения перегрузки или короткого замыкания.
Физические характеристики и совместимость с платами расширения
Максимальная длина печатной платы Arduino Due равна 4 дюйма, а ширина – 2,1 дюйма, без учета USB соединителей и разъема питания, которые выступают за приведенные габаритные размеры. Три отверстия под винты позволяют закрепить плату на поверхности или в корпусе. Обратите внимание, что расстояние между цифровыми выводами 7 и 8 составляет 160 мил (0.16″, 4,064 мм), не кратно промежуткам в 100 мил (2,54 мм) между остальными выводами.
Arduino Due сделан совместимым с большинством плат расширения, разработанных для Uno, Diecimila или Duemilanove. Цифровые выводы с 0 по 13 (и соседние выводы AREF и GND), аналоговые входы с 0 по 5, разъем питания, разъем «ICSP» (SPI) расположены одинаково на всех платах. Более того, основной UART (последовательный порт) находится на тех же выводах (0 и 1).
Пожалуйста, обратите внимание, что шина I2C расположена в Arduino Due на других выводах (20 и 21), не так как в Duemilanove / Diecimila (аналоговые входы 4 и 5).
arduino.ru
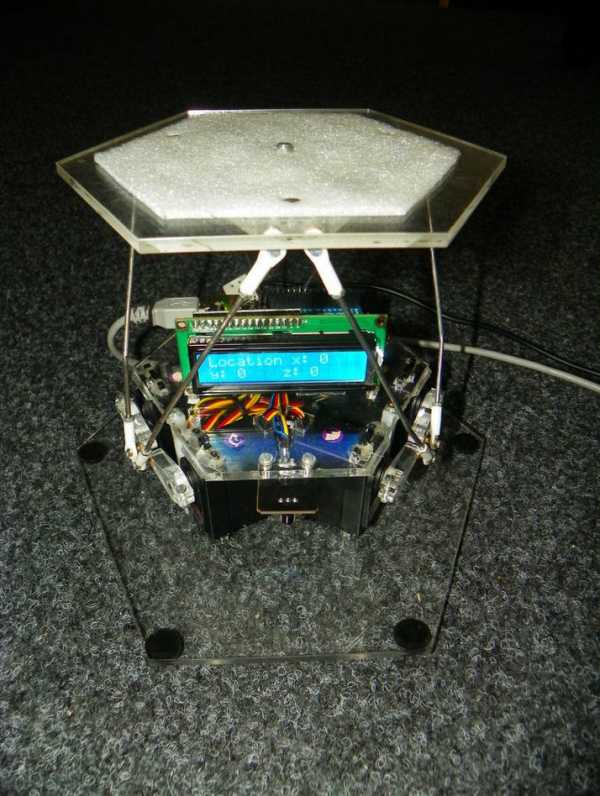
Платформа Стюарта с использованием Arduino||Arduino-diy.com
В проекте реализована платформа Стюарта.
Данный механизм-манипулятор обеспечивает шесть степеней свободы подвижной платформы. Проектируемая конструкция может быть использована для установки зеркальной видеокамеры, манипулирования небольшими объектами.
В данной конструкции, вместо линейных актуаторов используются обычные хобби-сервы для передачи движения. Управление платформой осуществляется помощью платы Arduino, в которой проводятся все необходимые расчеты для обеспечения выхода платформы в заданную позицию и управления сервоприводами.
Общая информация о платформе
- масса груза на платформе может составлять до 2 кг (проверка проводилась при нагрузке 1.5 кг. Видимых проблем перемещения не наблюдалось.). Теоретически, можно попробовать нагрузить ее большей массой;
- низкое энергопотребление – при нагрузке около 1 кг, потребляемая мощность составляла около 5 Ватт;
- минимальное перемещение платформы составляет около 1 миллиметра;
- высокие показатели точности выхода в позицию;
- высокая стабильность платформы даже при больших нагрузках.
Все файлы проекта платформы (чертежи, программа для Arduino, дополнительные библиотеки) расположены здесь:
Стоимость платформы в основном определяется стоимостью серводвигателей и стоимостью платы Arduino. Порезка и все остальные части конструкции по стоимости обойдутся дешевле.
IrDA и LCD дисплей с интерфейсом I2C были куплены на ebay. Стоимость их составила около 10$.
Узлы платформы были вырезаны из акрила толщиной 4 мм.
Инструменты, которые могут пригодиться: дрель, отвертка измерительные приборы – все, что есть в наличии ;), двусторонний скотч.
Проектирование подвижной платформы
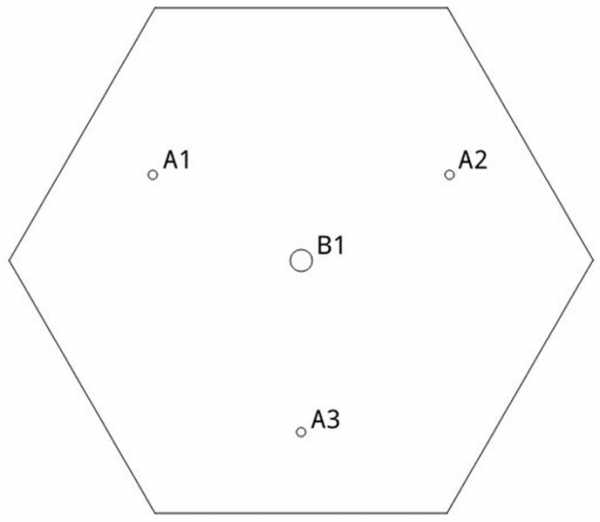

Для начала необходимо вырезать из акрила основные элементы конструкции. Для этого можно использовать чертежи в файлах platform_bot и platform_top. Платформа состоит из двух частей для большей универсальности. Сменив верхнюю часть, вы можете адаптировать ее к различным задачам. Соединяются они вместе винтами в отверстиях A1-A3.
Размеры данной платформы ориентированы на установку среднестатистической зеркальной видеокамеры. Это не истина последней инстанции. Платформы можно увеличивать, уменьшать, на ваше усмотрение.
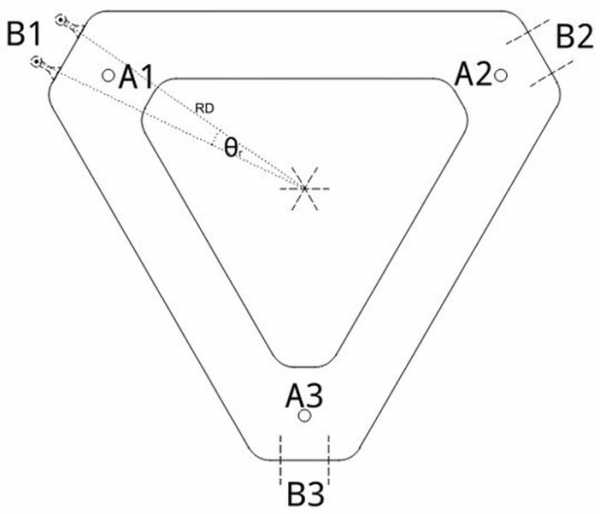
Места, обозначенные на нижней части платформы B1-B3 необходимы для отверстий, которые используются при установке штанг. На третьем рисунке вы можете увидеть, как именно они крепятся. Странные швы-деформации, которые видны на рисунке вызваны использованием клея для фиксации винтов в акриле.
Важно установить на платформе прорезиненный настил или что-то подобное и зафиксировать его с помощью двухстороннего скотча. Это поможет избежать проворота и перемещений камеры на платформе.
Длина штанг должна составлять около 12 сантиметров. На рисунке конечной платформы видно, что они слегка изогнуты. Благодаря этому значительно повысился диапазон перемещений платформы. Но можно их и не сгибать. Вообще, длина штанги подбирается таким образом, чтобы угол между ней и качалкой привода в горизонтальном положении примерно равнялся 70 градусам.
Проектирование неподвижной платформы основания
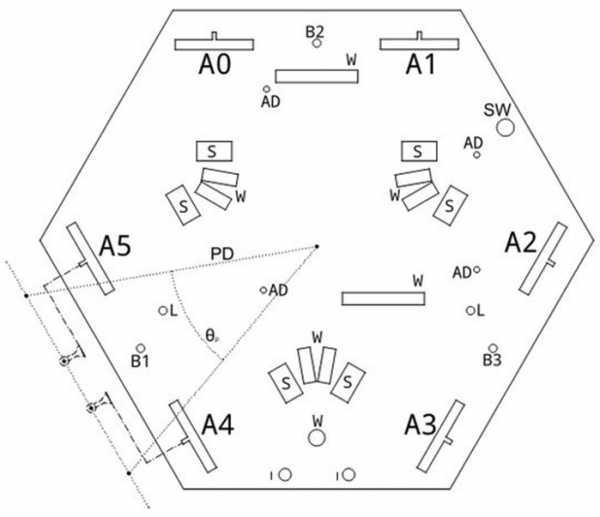
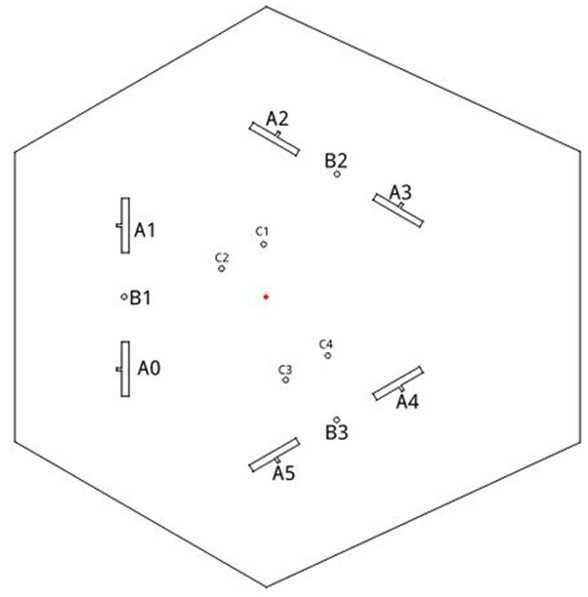

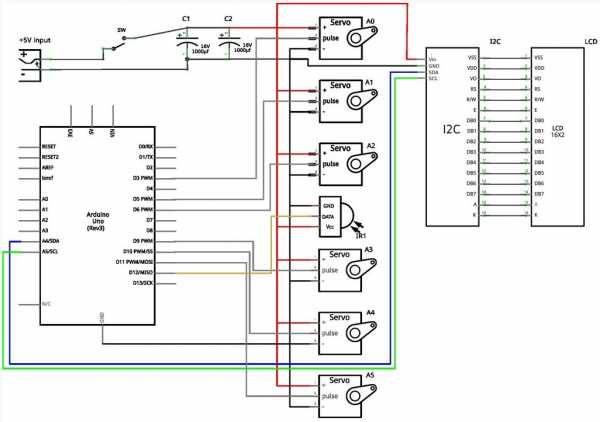
Прежде чем приступить к проектированию самого основания, необходимо предусмотреть печатную плату для подключения питания сервоприводов. Электросхема печатной платы приведена на рисунке выше. Чертеж печатной платы находится в файле power_board_layout.svg. Ко всем коннекторам в синем прямоугольнике подключаются серводвигатели. В зеленом прямоугольные – пины для подключения питания к другим устройствам: LCD дисплей, передатчик для беспроводной связи и т.п. В пределах фиолетового прямоугольника находятся пины для выключателя. Буквой C обозначены позиции конденсаторов. Пин на свободном конце подключается к земле. Можно для этого использовать пин GND на плате Arduino.
Теперь можете порезать основание, которое состоит из base_bot и base_top. Печатную плату разместите на нижней части и зафиксируйте винтами в местах под отверстия C. Прикрепите три качалки к отверстиям B1-B3 (из файла servo_arm.dxf). После этого разместите сервы на верхней части. Сервы устанавливаются в отверстия A0-A5, их кабели протяните через отверстия S и W, как показано на рисунке. Подключите все серводвигатели к макетной плате. Все коннекторы для управления сервами идут к плате Arduino через отверстия W. После этого зафиксируйте штанги на верхней части основания. Надежно их зафиксируйте, серводвигатели не должны двигаться.
Плату Arduino зафиксируйте с помощью винтов в отверстиях AD, подключите все кабели. Выключатель питания зафиксируйте, воспользовавшись отверстием SW. Для установки передатчика предусмотрены отверстия I. Не забудьте, также, установить LCD монитор на основание. Все кабели от дополнительных, перечисленных выше, устройств подключите к плате Arduino.
Окончательная сборка платформы Стюарта

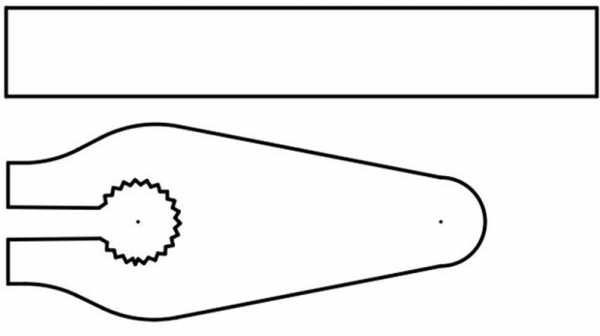
В качестве качалок для приводов используйте вырезанные из акрила узлы, чертеж которых находится в файле servo_arm.dxf. Просверлите в них отверстия. Расстояния до центра отверстий желательно выдержать как можно точнее. Полученные отверстия используются для фиксации сферического шарнира как это показано на рисунке выше. На другом конце сделайте отверстие для вала серводвигателя.
Установите все серводвигатели в начальное положение (ширина импульса 1500 миллисекунд), после чего наденьте качалки так, чтобы они находились в горизонтальном положении и затяните болты стяжки на торце.
Все! Ваша платформа Стюарта готова к использованию.
В проекте, ссылка на скачивание которого приведена в начале статьи, есть файл platform.ino. Это текст вашей основной программы для Arduino. В нем вам, скорее всего, придется изменить значения несколько переменных в соответствии с габаритными размерами вашей платформы. Большинство переменных показаны на рисунках выше.
MIN и MAX определяет минимальное и максимальное значения ширины импульса для серводвигателей;
zero[] – длина импульса, при которой качалки приводов находятся в горизонтальном положении;
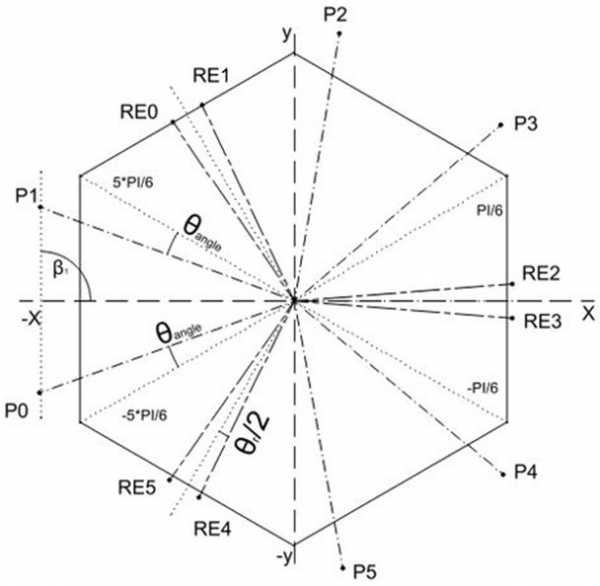
beta[] – угол между осью x и качалкой серводвигателя;
servo_min, servo_max – угол качалки серводвигателя в крайних положениях
servo_mult – значения и даташита серводвигателей , ширина импульса и угол поворота в соответствии с этой шириной;
L1 – длина качалки серводвигателя (от оси вращения серводвигателя до оси вращения шарнира штанги), в дюймах;
L2 – длина штанги, в дюймах;
z_home – высота подъема подвижной платформы над основанием, расстояние между качалкой серводвигателя и платформой.
Значения RD, PD, theta_p, theta_r – они показаны на рисунках, которые приводились выше.
Как работает платформа Стюарта?
Для управления положением платформы решается обратная задача кинематики. Мы знаем положение основания, необходимое положение подвижной платформы, поле чего проводим расчеты необходимых углов поворота валов сервоприводов и посылаем соответствующий сигнал управления через плату Arduino.
На первом этапе необходимо определить положение шарниров на основании и на подвижной платформе. После получения значений требуемых перемещений, программа рассчитывает необходимых координат шарниров подвижной платформы. Этот процесс делится на две части. Получение вектора перемещений по осям x, y, z и матрицы угла поворота, которая характеризует три соответствующих угла, после чего все это собирается вместе в функцию getrxp, которая обеспечивает новое положение платформы. После этого в программе рассчитывается необходимый угол поворота каждого серводвигателя, этот поворот преобразуется в ширину импульса и подается через пины Arduino на серводвигатели.
Для более легкого управления платформой, обратите внимание на файл src_comm_lib в библиотеке C++ для серийного обмена данными с Arduino. Пояснения по его использованию приведены в файле заголовка.
arduino-diy.com
