Как подключить двигатели к Arduino. Какие существуют драйверы моторов для Arduino. Чем отличаются драйверы L298N и L293D. Как правильно подключить и настроить драйвер двигателя для Arduino.
Драйверы двигателей для Arduino: зачем они нужны
Подключение моторов напрямую к Arduino невозможно из-за ограничений по току. Максимальный ток платы Arduino составляет всего 800 мА, а отдельного пина — 40 мА. Этого недостаточно даже для небольших двигателей постоянного тока. Какие есть варианты решения этой проблемы?
- Использование реле для включения/выключения мотора
- Подключение через силовой транзистор для управления скоростью
- Применение драйвера двигателя на основе H-моста
Последний вариант является наиболее гибким и удобным для создания роботов и механизмов на Arduino. Он позволяет управлять как скоростью, так и направлением вращения двигателя.
Принцип работы драйвера двигателя на основе H-моста
H-мост представляет собой электронную схему из четырех ключей, соединенных в виде буквы «H». В качестве ключей обычно используются транзисторы. Изменяя состояние ключей, можно управлять направлением тока через нагрузку (двигатель).

Основные состояния H-моста:
- Вращение вперед: Q1 и Q4 замкнуты, Q2 и Q3 разомкнуты
- Вращение назад: Q2 и Q3 замкнуты, Q1 и Q4 разомкнуты
- Торможение: Q1 и Q3 или Q2 и Q4 замкнуты
- Свободное вращение: все ключи разомкнуты
Такая схема позволяет не только включать/выключать двигатель, но и менять направление его вращения.
Популярные драйверы двигателей для Arduino
Наиболее распространенными драйверами двигателей для Arduino являются:
- L298N
- L293D
- HG7881 (на основе L9110S)
Рассмотрим особенности и характеристики каждого из них.
Драйвер двигателя L298N: характеристики и подключение
L298N — это мощный драйвер, позволяющий управлять двумя двигателями постоянного тока или одним шаговым двигателем. Его основные характеристики:
- Напряжение питания: 5-35В
- Максимальный ток: 2А на канал (до 4А при параллельном подключении)
- Возможность управления скоростью и направлением вращения
- Наличие защитных диодов
Распиновка L298N:
- Vcc — внешнее питание
- GND — земля
- IN1-IN4 — управляющие входы
- OUT1-OUT4 — выходы на двигатели
- ENA, ENB — включение каналов
Для подключения L298N к Arduino необходимо соединить управляющие входы IN1-IN4 с цифровыми пинами Arduino. Подача HIGH/LOW сигналов на эти входы позволяет задавать направление вращения. Для управления скоростью используются ШИМ-сигналы на входах ENA и ENB.

Драйвер двигателя L293D: особенности и применение
L293D — более простой и дешевый драйвер по сравнению с L298N. Его характеристики:
- Напряжение питания: до 36В
- Максимальный ток: 600мА на канал (пиковый до 1.2А)
- Два полных H-моста
- Встроенные защитные диоды
L293D позволяет управлять 2-4 двигателями постоянного тока или 1-2 шаговыми двигателями. Часто используется в виде готового шилда для Arduino.
Основные выводы L293D:
- Enable — включение мостов
- In1-In4 — управляющие входы
- Out1-Out4 — выходы на двигатели
- Vcc — питание логики (5В)
- Vs — силовое питание (до 36В)
Подключение L293D аналогично L298N, но требует меньше управляющих пинов Arduino за счет использования сдвигового регистра на шилде.
HG7881: бюджетный драйвер для небольших моторов
HG7881 (также известный как L9110) — самый простой и дешевый драйвер двигателей для Arduino. Его особенности:
- Напряжение питания: 2.5-12В
- Максимальный ток: 800мА
- Управление только направлением вращения (без регулировки скорости)
- Компактные размеры
HG7881 подходит для управления 2 небольшими моторами постоянного тока или 1 биполярным шаговым двигателем. Его основное преимущество — низкая цена и простота использования.
Сравнение драйверов L298N, L293D и HG7881
При выборе драйвера двигателя для Arduino следует учитывать несколько факторов:
- Мощность подключаемых двигателей
- Необходимость управления скоростью
- Количество подключаемых моторов
- Стоимость и доступность
Сравнительные характеристики рассмотренных драйверов:
- L298N: самый мощный, до 4А на канал, управление скоростью
- L293D: до 1.2А на канал, управление скоростью, часто в виде шилда
- HG7881: до 800мА, без управления скоростью, самый дешевый
L298N подойдет для мощных моторов, L293D — универсальное решение для большинства проектов, а HG7881 — бюджетный вариант для небольших двигателей.
Подключение и программирование драйвера двигателя на Arduino
Рассмотрим пример подключения и программирования драйвера L298N для управления двумя двигателями постоянного тока:
- Подключите выводы IN1-IN4 драйвера к цифровым пинам Arduino (например, 4, 5, 6, 7)
- Соедините ENA и ENB с ШИМ-пинами Arduino (например, 9 и 10)
- Подключите внешнее питание к Vcc и GND драйвера
- Присоедините двигатели к выходам OUT1-OUT4
Пример скетча для управления двигателями:
 «`cpp
// Определение пинов
const int ENA = 9;
const int IN1 = 4;
const int IN2 = 5;
const int ENB = 10;
const int IN3 = 6;
const int IN4 = 7;
void setup() {
// Настройка пинов на выход
pinMode(ENA, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(ENB, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
}
void loop() {
// Вращение первого мотора вперед
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
analogWrite(ENA, 200); // Скорость 0-255
// Вращение второго мотора назад
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
analogWrite(ENB, 150); // Скорость 0-255
delay(2000); // Пауза 2 секунды
// Остановка моторов
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
delay(1000); // Пауза 1 секунда
}
«`
Этот код демонстрирует базовое управление двигателями через драйвер L298N. Вы можете изменять значения analogWrite() для регулировки скорости и комбинации HIGH/LOW на входах IN1-IN4 для изменения направления вращения.
«`cpp
// Определение пинов
const int ENA = 9;
const int IN1 = 4;
const int IN2 = 5;
const int ENB = 10;
const int IN3 = 6;
const int IN4 = 7;
void setup() {
// Настройка пинов на выход
pinMode(ENA, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(ENB, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
}
void loop() {
// Вращение первого мотора вперед
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
analogWrite(ENA, 200); // Скорость 0-255
// Вращение второго мотора назад
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
analogWrite(ENB, 150); // Скорость 0-255
delay(2000); // Пауза 2 секунды
// Остановка моторов
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
delay(1000); // Пауза 1 секунда
}
«`
Этот код демонстрирует базовое управление двигателями через драйвер L298N. Вы можете изменять значения analogWrite() для регулировки скорости и комбинации HIGH/LOW на входах IN1-IN4 для изменения направления вращения.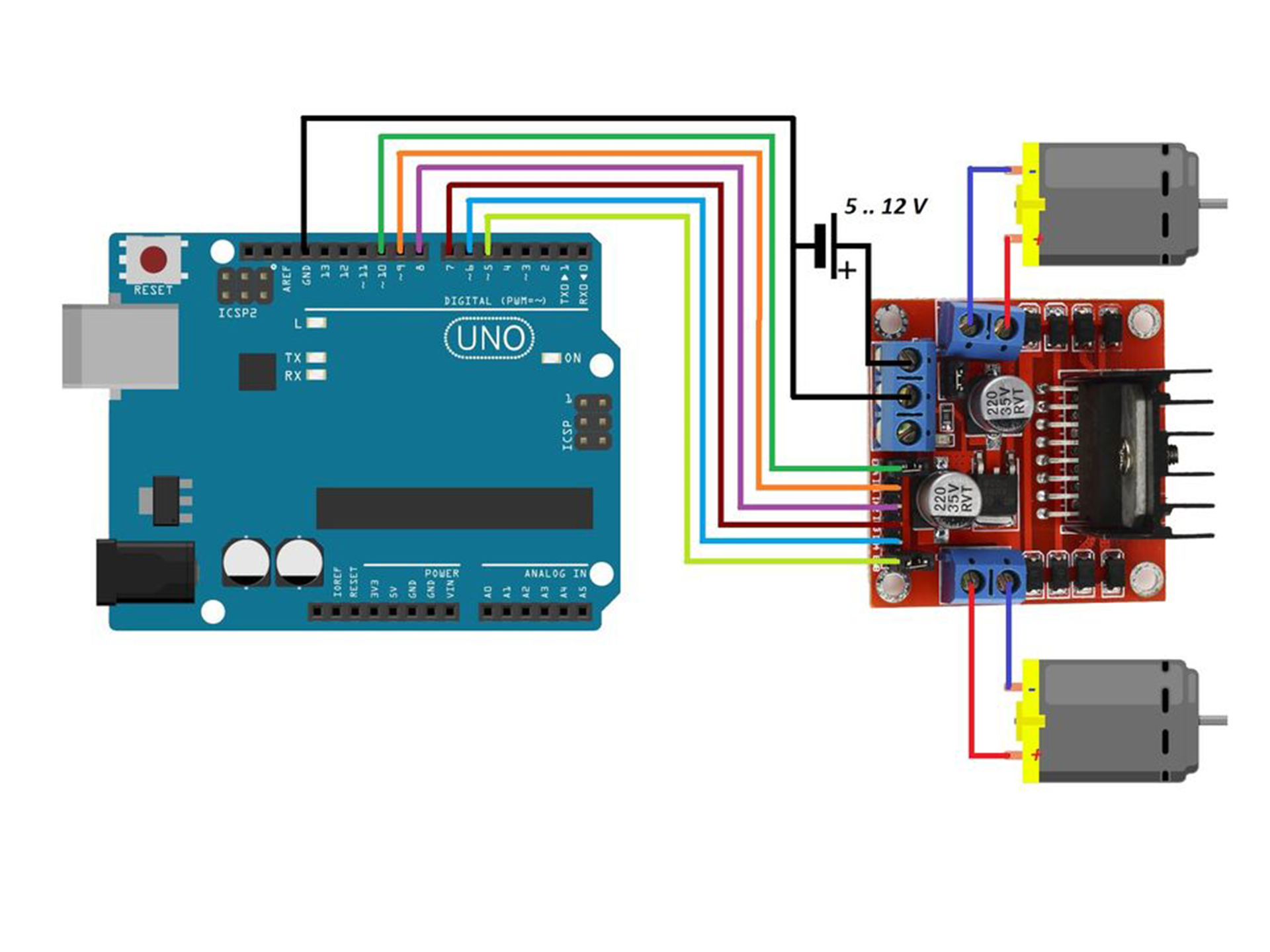
Типичные проблемы при работе с драйверами двигателей
При использовании драйверов двигателей с Arduino могут возникать следующие проблемы:
- Перезагрузка Arduino из-за просадок напряжения при старте двигателей
- Нагрев драйвера при длительной работе
- Неправильное направление вращения двигателей
- Помехи в работе других компонентов схемы
Для решения этих проблем рекомендуется:
- Использовать отдельный источник питания для двигателей
- Добавить конденсаторы для сглаживания пульсаций тока
- Проверять полярность подключения двигателей
- Применять экранирование и развязку питания для чувствительных компонентов
Соблюдение этих рекомендаций поможет создать надежную и стабильно работающую схему управления двигателями на базе Arduino.
Управление мотором Ардуино
В этом уроке мы рассмотрим как управлять обычным мотором постоянного тока при помощи Ардуино.
У вас наверняка есть такие моторчики дома от старых игрушек или машинок. Так давайте их используем, нечего им валяться без дела. И не важно на какое они напряжение 5 вольт или 12 вольт, главное что бы были постоянного тока, а не переменного.
Управлять будем с помощью Ардуино, а точнее с помощью ШИМ выводов которые есть на этих платах.
Можно конечно купить специальную плату-драйвер для управления моторами, но мы не будем этого делать, а обойдёмся только Ардуино.
В управлении мотором нет ничего сложного, надо только подключить мотор к выводу ШИМ, а потенциометр которым будем управлять, к аналоговому входу.
ШИМ – это Широтно-Импульсная Модуляция, или по другому PWM – Pulse-Width Modulation — процесс управления мощности методом пульсирующего включения и выключения прибора.
ШИМ выходов на платах Ардуино несколько.
На платах Arduino UNO такие выходы отмечены знаком тильда.
Выходы которые можно использовать как ШИМ — это 3, 5, 6, 9, 10, 11
У Arduino Mega они обозначаются как PWM со 2 по 13 пин и 44-46.
У Arduino NANO никаких обозначений на плате нет. Надо просто запомнить это 3, 5, 6, 9, 10, 11.
Точно так же как и у Ардуино УНО.
Подробнее про технологию ШИМ можно прочитать на моём сайте.
http://arduino-kid.ru/arduino_nano_pwm
Там описан принцип работы, а также некоторые ограничения которые надо знать. Например, при совместной работе с функцией tone().
Напрямую подключать моторы к Ардуино нельзя, так как они потребляют большой ток и могут питаться не 5 вольтами, а больше. Поэтому я подключил мотор через транзистор и параллельно мотору установил диод..
Описание скетчей.
Сегодня будет несколько скетчей.
Первый для управления скоростью вращения мотора. Управлять будем с помощью потенциометра. А в следующем уроке я покажу, как управлять вращением мотора программно. Плавно меняя скорость вращения.
Во втором мы объединим то что делали в двух последних уроках.
Короче сделаем тахометр на Ардуино. А для любителей велоспорта это прям почти готовый проект для определения скорости по количеству оборотов.
На мотор я приклеил магнит, а напротив установил датчик ХОЛЛА. И каждый раз когда магнит находится рядом с датчиком, датчик посылает сигнал на Ардуино и выводит значения на индикатор TM1637.
Как подключить мотор к Ардуино я показал на видео.
Драйверы двигателя L298N, L293D и Arduino Motor Shield
Драйвер двигателя выполняет крайне важную роль в проектах ардуино, использующих двигатели постоянного тока или шаговые двигатели. C помощью микросхемы драйвера или готового шилда motor shield можно создавать мобильных роботов, автономные автомобили на ардуино и другие устройства с механическими модулями. В этой статье мы рассмотрим подключение к ардуино популярных драйверов двигателей на базе микросхем L298N и L293D.
Драйвер двигателя в проектах ардуино
Для чего нужен драйвер двигателя?
Как же тогда подключить двигатель к ардуино? Есть несколько вариантов действий:
Использовать реле. Мы включаем двигатель в отдельную электрическую сеть, никак не связанную с платой Arduino. Реле по команде ардуино замыкает или размыкает контакты, тем самым включает или выключает ток. Соответственно, двигатель включается или выключается. Главным преимуществом этой схемы является ее простота и возможность использовать Главным недостатком данной схемы является то, что мы не можем управлять скоростью и направлением вращения.
Использовать силовой транзистор. В данном случае мы можем управлять током, проходящим через двигатель, а значит, можем управлять скоростью вращения шпинделя. Но для смены направления вращения этот способ не подойдет.
Использовать специальную схему подключения, называемую H-мостом, с помощью которой мы можем изменять направление движения шпинделя двигателя. Сегодня можно без проблем найти как микросхемы, содержащие два или больше H-моста, так и отдельные модули и платы расширения, построенные на этих микросхемах.
В этой статье мы рассмотрим последний, третий вариант, как наиболее гибкий и удобный для создания первых роботов на ардуино.
Микросхема или плата расширения Motor Shield
Motor Shield – плата расширения для Ардуино, которая обеспечивает работу двигателей постоянного тока и шаговых двигателей. Самыми популярными платами Motor Shield являются схемы на базе чипов L298N и L293D, которые могут управлять несколькими двигателями. На плате установлен комплект сквозных колодок Ардуино Rev3, позволяющие устанавливать другие платы расширения. Также на плате имеется возможность выбора источника напряжения – Motor Shield может питаться как от Ардуино, так и от внешнего источника. На плате имеется светодиод, который показывает, работает ли устройство. Все это делает использование драйвера очень простым и надежным – не нужно самим изобретать велосипеды и решать уже кем-то решенные проблемы. В этой статье мы будем говорить именно о шилдах.
Принцип действия H-моста
Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.
Схема моста изображена на рисунке. Q1…Q4 0 полевые, биполярные или IGBT транзисторы. Последние используются в высоковольтных сетях. Биполярные транзисторы практически не используются, они могут присутствовать в маломощных схемах. Для больших токов берут полевые транзисторы с изолированным затвором. Ключи не должны быть замкнуты вместе одновременно, чтобы не произошло короткого замыкания источника. Диоды D1…D4 ограничительные, обычно используются диоды Шоттки.
С помощью изменения состояния ключей на H-мосте можно регулировать направление движения и тормозить моторы. В таблице приведены основные состояния и соответствующие им комбинации на пинах.
| Q1 | Q2 | Q3 | Q4 | Состояние |
| 1 | 0 | 0 | 1 | Поворот мотора вправо |
| 0 | 1 | 1 | 0 | Поворот мотора влево |
| 0 | 0 | 0 | 0 | Свободное вращение |
| 0 | 1 | 0 | 1 | Торможение |
| 1 | 0 | 1 | 0 | Торможение |
| 1 | 1 | 0 | 0 | Короткое замыкание |
| 0 | 0 | 1 | 1 | Короткое замыкание |
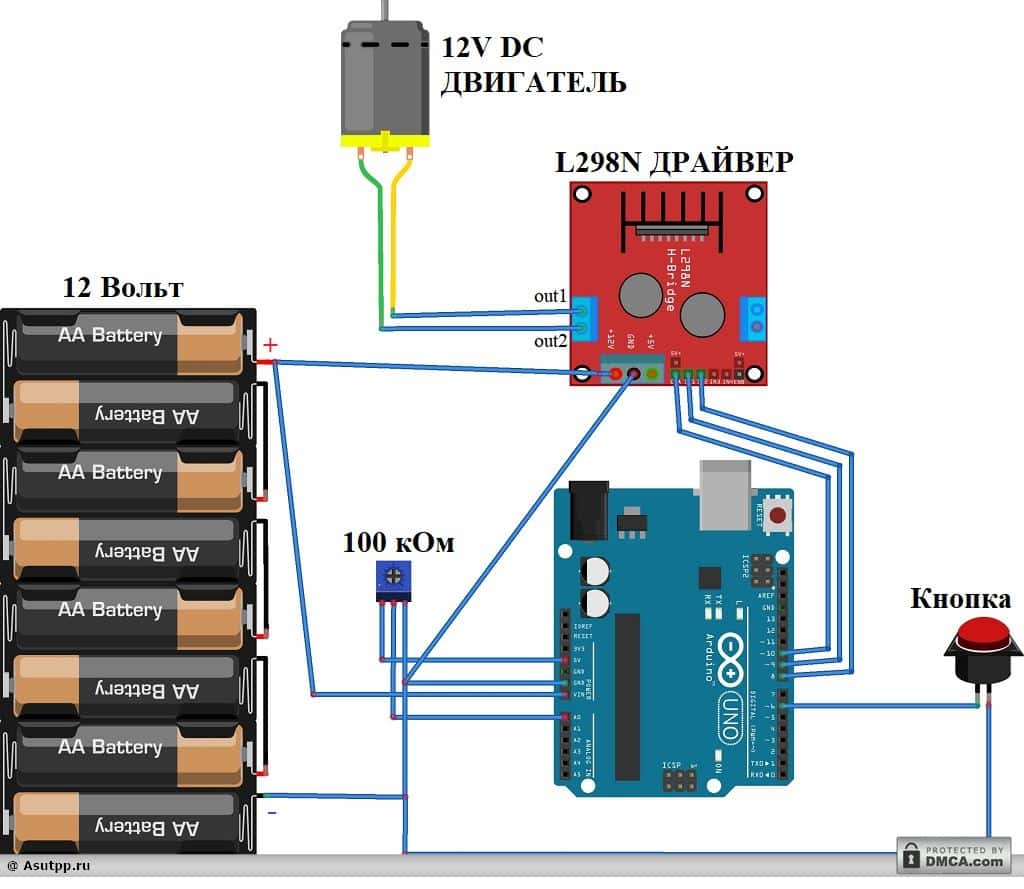
Драйвер двигателя L298N
Модуль используется для управления шаговыми двигателями с напряжением от 5 до 35 В. При помощи одной платы L298N можно управлять сразу двумя двигателями. Наибольшая нагрузка, которую обеспечивает микросхема, достигает 2 А на каждый двигатель. Если подключить двигатели параллельно, это значение можно увеличить до 4 А.
Плата выглядит следующим образом:
Распиновка микросхемы L298N:
- Vcc – используется для подключения внешнего питания;
- 5В;
- Земля GND;
- IN1, IN2, IN3, IN4 – используется для плавного управления скоростью вращения мотора;
- OUT1, OUT2 – используется для выхода с первого двигателя;
- OUT3, OUT4 – используется для выхода со второго двигателя;
- S1 – переключает питание схемы: от внешнего источника или от внутреннего преобразователя;
- ENABLE A, B – требуются для раздельного управления каналами. Используются в двух режимах – активный, при котором каналами управляет микроконтроллер и имеется возможность изменения скорости вращения, и пассивный, в котором невозможно управлять скоростью двигателей (установлено максимальное значение).
При подключении двух двигателей, нужно проверить, чтобы у них была одинаковая полярность. Если полярность разная, то при задании направления движения они будут вращаться в противоположные стороны.
Драйвер двигателя L293D
L293D – является самой простой микросхемой для работы с двигателями. L293D обладает двумя H-моста, которые позволяют управлять двумя двигателями. Рабочее напряжение микросхемы – 36 В, рабочий ток достигает 600 мА. На двигатель L293D может подавать максимальный ток в 1,2 А.
В схеме имеется 16 выходов. Распиновка:
- +V – питание на 5 В;
- +Vmotor – напряжение питания для мотором до 36 В;
- 0V – земля;
- En1, En2 –включают и выключают H-мосты;
- In1, In2 – управляют первым H-мостом;
- Out1, Out2 – подключение первого H-моста;
- In3, In4 – управляют вторым H-мостом;
- Out3, Out4 – подключение второго H-моста.
Для подключения к микроконтроллеру Arduino Uno нужно соединить выходы In1 на L293D и 7 пин на Ардуино, In2 – 8, In3 – 2, In4 – 3, En1 – 6, En2 – 5, V – 5V, Vmotor – 5 V, 0V – GND. Пример подключения одного двигателя к Ардуино показан на рисунке.
Драйвер двигателя на микросхеме HG7881
HG7881 – двухканальный драйвер, к которому можно подключить 2 двигателя или четырехпроводной двухфазный шаговый двигатель. Устройство часто используется из-за своей невысокой стоимости. Драйвер используется только для изменения направления вращения, менять скорость он не может.
Плата содержит 2 схемы L9110S, работающие как H-мост.
Характеристики драйвера HG7881:
- 4-контактное подключение;
- Питание для двигателей от 2,5 В до 12 В;
- Потребляемый ток менее 800 мА;
- Малые габариты, небольшой вес.
Распиновка:
- GND – земля;
- Vcc – напряжение питания 2,5В – 12В;
- A-IA – вход A(IA) для двигателя A;
- A-IB – вход B (IB) для двигателя A;
- B-IA – вход A(IA) для двигателя B;
- B-IB – вход B (IB) для двигателя B.
В зависимости от поданного сигнала на выходах IA и IB будет разное состояние для двигателей. Возможные варианты для одного из моторов приведены в таблице.
| IA | IB | Состояние мотора |
| 0 | 0 | Остановка |
| 1 | 0 | Двигается вперед |
| 0 | 1 | Двигается назад |
| 1 | 1 | Отключение |
Подключение одного двигателя к Ардуино изображено на рисунке.
Сравнение модулей
Модуль L293D подает максимальный ток в 1,2А, в то время как на L298N можно добиться максимального тока в 4 А. Также L293D обладает меньшим КПД и быстро греется во время работы. При этом L293D является самой распространенной платой и стоит недорого. Плата HG7881 отличается от L293D и L298N тем, что с ее помощью можно управлять только направлением вращения, скорость менять она не может. HG7881 – самый дешевый и самый малогабаритный модуль.
Подключение L298N к Arduino
Как уже упоминалось, в первую очередь нужно проверить полярность подключенных двигателей. Двигатели, вращающиеся в различных направлениях, неудобно программировать.
Нужно присоединить источник питания. + подключается к пину 4 на плате L298N, минус (GND) – к 5 пину. Затем нужно соединить выходы с L298N и пины на Ардуино, причем некоторые из них должны поддерживать ШИМ-модуляцию. На плате Ардуино они обозначены ~. Выходы с L298N IN1, IN2, IN3 и IN4 подключить к D7, D6, D5 и D4 на Ардуино соответственно. Подключение всех остальных контактов представлено на схеме.
Направление вращения задается с помощью сигналов HIGH и LOW на каждый канал. Двигатели начнут вращаться, только когда на 7 пине для первого мотора и на 12 пине для второго на L298N будет сигнал HIGH. Подача LOW останавливает вращение. Чтобы управлять скоростью, используются ШИМ-сигналы.
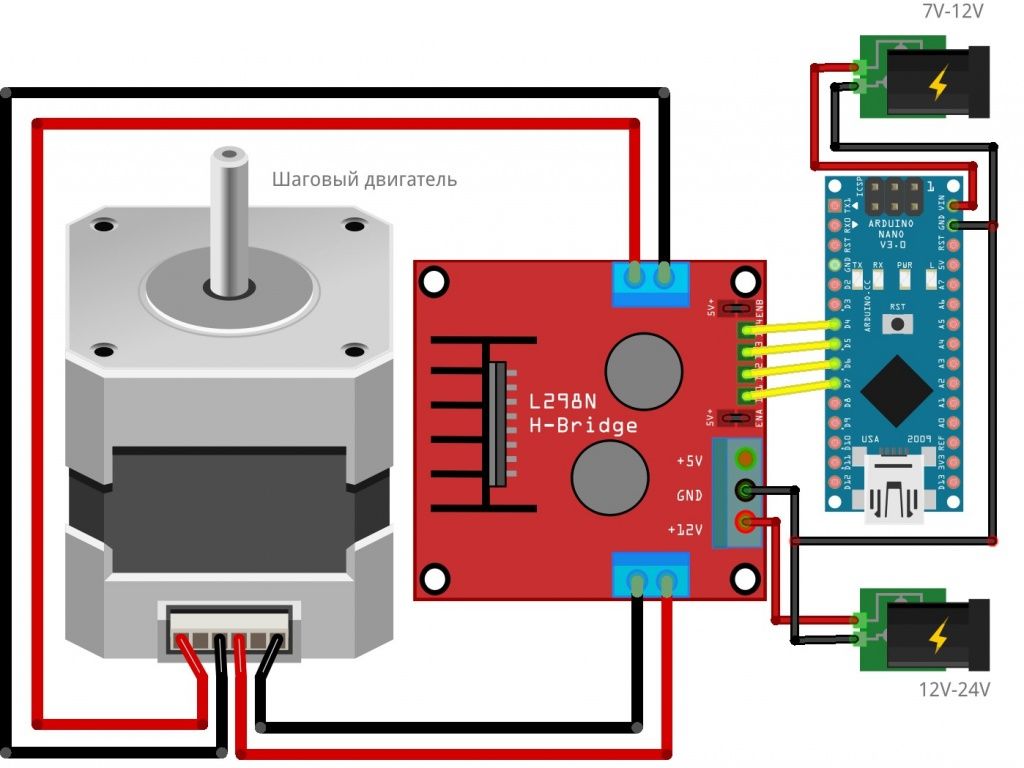
Для управления шаговым двигателем в Arduino IDE существует стандартная библиотека Stepper library. Чтобы проверить работоспособность собранной схемы, можно загрузить тестовый пример stepper_oneRevolution. При правильной сборке вал двигателя начнет вращаться.
При работе с моторами Ардуино может периодически перезагружаться. Это возникает из-за того, что двигателям требуются большие токи при старте и в момент торможения. Для решения этой проблемы в плату встроены конденсаторы, диоды и другие схемы. Также для этих целей на шидле имеется раздельное питание.
L293d подключение к ардуино
Подключение драйвера RKP-MDS-L293D Motor Shield L293D к Arduino UNO
Модуль управления моторами RKP-MDS-L293D на микросхемах L293D предназначен для управления различными типами двигателей — постоянного тока (до 4-х шт.), сервомоторов (до 2-х шт.) и шаговых двигателей (до 2-х шт.) совместно с Arduino.
На электрической схеме драйвера RKP-MDS-L293D Motor Driver L293D видно, что режимы управление двигателями постоянного тока и шаговыми двигателями осуществляется через микросхему 74HCT595N (см. рис. 1).
Функциональная диаграмма микросхемы 74HCT595N
Это регистр последовательного сдвига с защелкой.
Скачать библиотеку AFMotor Motor shield =>>
В библиотеке AFMotor Motor shield определены pin для Motor Shield L293D по которым осуществляется установка режимов управление моторами:
За изменение скорости вращения двигателей отвечаю цепи PWM0A, PWM0B, PWM1A, PWM1B, PWM2A и PWM2B микросхем драйверов двигателей L293D (см. рис. 2).
Соответствие pin — Motor Shield L293D и pin — Arduino Uno приведены в таблице 1.
А назначение управляющих битов регистра 74HCT595N для моторов 1- 4 в таблице 2.
Из таблицы 2 видно, чтобы заставить Мотор 1 работать на max скорости нужно в регистр передать byte у которого bit 2 = 1 и bit 3 = 0, а чтобы поменять вращение на противоположное – bit 2 = 0 и bit 3 = 1.
!!Еще одна важная особенность.
Питание сервомоторов осуществляется от платы Arduino 5V. Если сервомоторы потребляют больший ток чем может выдать источник питания Arduino, то всё устройство начинает «глючить».
Это может случиться даже с небольшими серводвигателями, если их где-то заклинит. Тогда ток потребления может возрасти до 0,8-1А. Поэтому питать серводвигатели лучше от дополнительного источника питания.
Подключение питания
Питание моторов подключенных к драйверу RKP-MDS-L293D Motor Driver L293D может осуществляется не сколькими способами:
1. От одного источника питания.
В этом случае питание подается на разъем Arduino 6-12В и с выхода линейного стабилизатора происходит питание цифровых схем Arduino и сервомоторов. Далее питание 6-12В через контакт Vin и установленный джампер, подается на Motor Shield L293D для питания остальных типов моторов.
2. От двух источников питания.
Для этого необходимо снять джампер источника питания. В этом случае источник питания подключенный к разъем у Arduino 6-12В обеспечивает ее работу, цифровых схем Motor Shield L293D и питание серво двигателей. А второй источник питания 4.5-25В — питание двигателей постоянного тока и шаговых двигателей (см. рис. 3).
Схема подключения двигателей к драйверу RKP-MDS-L293D Motor Driver L293D
Подключение моторов постоянного тока (4 DC Motors)
Драйвер Motor Shield L293D позволяет одновременно подключить до 4-х двигателей постоянного тока (см. рис. 4).
Подключение шаговых двигателей к драйверу RKP-MDS-L293D Motor Driver L293D
Драйвер Motor Shield L293D позволяет одновременно подключить до 2-х шаговых двигателей (см. рис. 5).
Драйвер двигателя выполняет крайне важную роль в проектах ардуино, использующих двигатели постоянного тока или шаговые двигатели. C помощью микросхемы драйвера или готового шилда motor shield можно создавать мобильных роботов, автономные автомобили на ардуино и другие устройства с механическими модулями. В этой статье мы рассмотрим подключение к ардуино популярных драйверов двигателей на базе микросхем L298N и L293D.
Драйвер двигателя в проектах ардуино
Для чего нужен драйвер двигателя?
Как известно, плата ардуино имеет существенные ограничения по силе тока присоединенной к ней нагрузки. Для платы это 800 mA, а для каждого отдельного вывода – и того меньше, 40mA. Мы не можем подключить напрямую к Arduino Uno, Mega или Nano даже самый маленький двигатель постоянного тока. Любой из этих двигателей в момент запуска или остановки создаст пиковые броски тока, превышающие этот предел.
Как же тогда подключить двигатель к ардуино? Есть несколько вариантов действий:
Использовать реле. Мы включаем двигатель в отдельную электрическую сеть, никак не связанную с платой Arduino. Реле по команде ардуино замыкает или размыкает контакты, тем самым включает или выключает ток. Соответственно, двигатель включается или выключается. Главным преимуществом этой схемы является ее простота и возможность использовать Главным недостатком данной схемы является то, что мы не можем управлять скоростью и направлением вращения.
Использовать силовой транзистор. В данном случае мы можем управлять током, проходящим через двигатель, а значит, можем управлять скоростью вращения шпинделя. Но для смены направления вращения этот способ не подойдет.
Использовать специальную схему подключения, называемую H-мостом, с помощью которой мы можем изменять направление движения шпинделя двигателя. Сегодня можно без проблем найти как микросхемы, содержащие два или больше H-моста, так и отдельные модули и платы расширения, построенные на этих микросхемах.
В этой статье мы рассмотрим последний, третий вариант, как наиболее гибкий и удобный для создания первых роботов на ардуино.
Микросхема или плата расширения Motor Shield
Motor Shield – плата расширения для Ардуино, которая обеспечивает работу двигателей постоянного тока и шаговых двигателей. Самыми популярными платами Motor Shield являются схемы на базе чипов L298N и L293D, которые могут управлять несколькими двигателями. На плате установлен комплект сквозных колодок Ардуино Rev3, позволяющие устанавливать другие платы расширения. Также на плате имеется возможность выбора источника напряжения – Motor Shield может питаться как от Ардуино, так и от внешнего источника. На плате имеется светодиод, который показывает, работает ли устройство. Все это делает использование драйвера очень простым и надежным – не нужно самим изобретать велосипеды и решать уже кем-то решенные проблемы. В этой статье мы будем говорить именно о шилдах.
Принцип действия H-моста
Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.
Схема моста изображена на рисунке. Q1…Q4 0 полевые, биполярные или IGBT транзисторы. Последние используются в высоковольтных сетях. Биполярные транзисторы практически не используются, они могут присутствовать в маломощных схемах. Для больших токов берут полевые транзисторы с изолированным затвором. Ключи не должны быть замкнуты вместе одновременно, чтобы не произошло короткого замыкания источника. Диоды D1…D4 ограничительные, обычно используются диоды Шоттки.
С помощью изменения состояния ключей на H-мосте можно регулировать направление движения и тормозить моторы. В таблице приведены основные состояния и соответствующие им комбинации на пинах.
| Q1 | Q2 | Q3 | Q4 | Состояние |
| 1 | 1 | Поворот мотора вправо | ||
| 1 | 1 | Поворот мотора влево | ||
| Свободное вращение | ||||
| 1 | 1 | Торможение | ||
| 1 | 1 | Торможение | ||
| 1 | 1 | Короткое замыкание | ||
| 1 | 1 | Короткое замыкание |
Драйвер двигателя L298N
Модуль используется для управления шаговыми двигателями с напряжением от 5 до 35 В. При помощи одной платы L298N можно управлять сразу двумя двигателями. Наибольшая нагрузка, которую обеспечивает микросхема, достигает 2 А на каждый двигатель. Если подключить двигатели параллельно, это значение можно увеличить до 4 А.
Плата выглядит следующим образом:
Распиновка микросхемы L298N:
- Vcc – используется для подключения внешнего питания;
- 5В;
- Земля GND;
- IN1, IN2, IN3, IN4 – используется для плавного управления скоростью вращения мотора;
- OUT1, OUT2 – используется для выхода с первого двигателя;
- OUT3, OUT4 – используется для выхода со второго двигателя;
- S1 – переключает питание схемы: от внешнего источника или от внутреннего преобразователя;
- ENABLE A, B – требуются для раздельного управления каналами. Используются в двух режимах – активный, при котором каналами управляет микроконтроллер и имеется возможность изменения скорости вращения, и пассивный, в котором невозможно управлять скоростью двигателей (установлено максимальное значение).
При подключении двух двигателей, нужно проверить, чтобы у них была одинаковая полярность. Если полярность разная, то при задании направления движения они будут вращаться в противоположные стороны.
Драйвер двигателя L293D
L293D – является самой простой микросхемой для работы с двигателями. L293D обладает двумя H-моста, которые позволяют управлять двумя двигателями. Рабочее напряжение микросхемы – 36 В, рабочий ток достигает 600 мА. На двигатель L293D может подавать максимальный ток в 1,2 А.
В схеме имеется 16 выходов. Распиновка:
- +V – питание на 5 В;
- +Vmotor – напряжение питания для мотором до 36 В;
- 0V – земля;
- En1, En2 –включают и выключают H-мосты;
- In1, In2 – управляют первым H-мостом;
- Out1, Out2 – подключение первого H-моста;
- In3, In4 – управляют вторым H-мостом;
- Out3, Out4 – подключение второго H-моста.
Для подключения к микроконтроллеру Arduino Uno нужно соединить выходы In1 на L293D и 7 пин на Ардуино, In2 – 8, In3 – 2, In4 – 3, En1 – 6, En2 – 5, V – 5V, Vmotor – 5 V, 0V – GND. Пример подключения одного двигателя к Ардуино показан на рисунке.
Драйвер двигателя на микросхеме HG7881
HG7881 – двухканальный драйвер, к которому можно подключить 2 двигателя или четырехпроводной двухфазный шаговый двигатель. Устройство часто используется из-за своей невысокой стоимости. Драйвер используется только для изменения направления вращения, менять скорость он не может.
Плата содержит 2 схемы L9110S, работающие как H-мост.
Характеристики драйвера HG7881:
- 4-контактное подключение;
- Питание для двигателей от 2,5 В до 12 В;
- Потребляемый ток менее 800 мА;
- Малые габариты, небольшой вес.
Распиновка:
- GND – земля;
- Vcc – напряжение питания 2,5В – 12В;
- A-IA – вход A(IA) для двигателя A;
- A-IB – вход B (IB) для двигателя A;
- B-IA – вход A(IA) для двигателя B;
- B-IB – вход B (IB) для двигателя B.
В зависимости от поданного сигнала на выходах IA и IB будет разное состояние для двигателей. Возможные варианты для одного из моторов приведены в таблице.
| IA | IB | Состояние мотора |
| Остановка | ||
| 1 | Двигается вперед | |
| 1 | Двигается назад | |
| 1 | 1 | Отключение |
Подключение одного двигателя к Ардуино изображено на рисунке.
Сравнение модулей
Модуль L293D подает максимальный ток в 1,2А, в то время как на L298N можно добиться максимального тока в 4 А. Также L293D обладает меньшим КПД и быстро греется во время работы. При этом L293D является самой распространенной платой и стоит недорого. Плата HG7881 отличается от L293D и L298N тем, что с ее помощью можно управлять только направлением вращения, скорость менять она не может. HG7881 – самый дешевый и самый малогабаритный модуль.
Подключение L298N к Arduino
Как уже упоминалось, в первую очередь нужно проверить полярность подключенных двигателей. Двигатели, вращающиеся в различных направлениях, неудобно программировать.
Нужно присоединить источник питания. + подключается к пину 4 на плате L298N, минус (GND) – к 5 пину. Затем нужно соединить выходы с L298N и пины на Ардуино, причем некоторые из них должны поддерживать ШИМ-модуляцию. На плате Ардуино они обозначены
. Выходы с L298N IN1, IN2, IN3 и IN4 подключить к D7, D6, D5 и D4 на Ардуино соответственно. Подключение всех остальных контактов представлено на схеме.
Направление вращения задается с помощью сигналов HIGH и LOW на каждый канал. Двигатели начнут вращаться, только когда на 7 пине для первого мотора и на 12 пине для второго на L298N будет сигнал HIGH. Подача LOW останавливает вращение. Чтобы управлять скоростью, используются ШИМ-сигналы.
Для управления шаговым двигателем в Arduino IDE существует стандартная библиотека Stepper library. Чтобы проверить работоспособность собранной схемы, можно загрузить тестовый пример stepper_oneRevolution. При правильной сборке вал двигателя начнет вращаться.
При работе с моторами Ардуино может периодически перезагружаться. Это возникает из-за того, что двигателям требуются большие токи при старте и в момент торможения. Для решения этой проблемы в плату встроены конденсаторы, диоды и другие схемы. Также для этих целей на шидле имеется раздельное питание.
В это статье мы рассмотрим процесс подключения разного типа двигателей (моторов) к ардуино.
Можно, конечно, было бы спаять свою собственную схему, но проще всего это сделать с помощью шилда на базе чипа L293D, который на Ali стоит $1.8 .
Что такое шилд L293D
Это модуль для Arduino UNO, в котором используется две микросхемы L293D.
Микросхема L293D — это драйвер двухканальный двигателей со встроенными защитными диодами.
Использование двух таких микросхем позволяет подключить одновременно 4 мотора постоянного тока, либо 2 шаговых двигателя. На шилде также располагается сдвиговый регистр 74НС595, который нужен для уменьшения количества управляющих выводов.
К шилду можно также подключать серво-приводы.
Наиболее важный момент, на который стоит обратить внимание — это питание шилда, точнее самих приводов (будем называть это «силовой частью»). Так вот, питание приводов производится либо от внешнего клеммника (6) либо замыканием джампера (5) (питанием моторов +M соединяется с выводом Vin Arduino). Напряжение для объединенного питания 6 — 12 В. Я лично предпочитаю использовать отдельный источник питания, чтобы не создавать помехи в цепи питания Arduino.
Шилд ставится прямо на плату Arduino UNO, при этом почти все цифровые выходы будут использоваться шилдом. Из свободных цифровых выводов останутся только пины 2, 13 и пины интерфейса UART- 0, 1. Впрочем аналоговые выводы можно использовать в качестве цифровых.
Подключение двух моторов постоянного тока к Arduino через шилд L293D
Код программы для управления двумя моторами постоянного тока.
Пример 35. Плата расширения для двигателей на L293D [База знаний]
#include <AFMotor.h> // Подключаем библиотеку для работы с шилдом
// Подключаем моторы к клеммникам M1, M2, M3, M4
AF_DCMotor motor1(1);
AF_DCMotor motor2(2);
AF_DCMotor motor3(3);
AF_DCMotor motor4(4);
//счетчик
int i;
void setup() {
// Задаем скорость вращения моторов (аналог работы PWM)
motor1.setSpeed(100);
motor1.run(RELEASE);
motor2.setSpeed(100);
motor2.run(RELEASE);
motor3.setSpeed(100);
motor3.run(RELEASE);
motor4.setSpeed(100);
motor4.run(RELEASE);
}
void loop() {
// Двигаемся условно вперед одну секунду
motor1.run(FORWARD); // Задаем движение вперед
motor2.run(FORWARD);
motor3.run(FORWARD);
motor4.run(FORWARD);
motor1.setSpeed(100); // Задаем скорость движения
motor2.setSpeed(100);
motor3.setSpeed(100);
motor4.setSpeed(100);
delay(1000);
// Останавливаем двигатели
/* Очень не рекомендуем резко переключать направление вращения двигателей.
Лучше дать небольшой промежуток времени.*/
motor1.run(RELEASE);
motor2.run(RELEASE);
motor3.run(RELEASE);
motor4.run(RELEASE);
delay(500);
// Двигаемся в обратном направлении
motor1.run(BACKWARD); // Задаем движение назад
motor2.run(BACKWARD);
motor3.run(BACKWARD);
motor4.run(BACKWARD);
motor1.setSpeed(100); // Задаем скорость движения
motor2.setSpeed(100);
motor3.setSpeed(100);
motor4.setSpeed(100);
delay(1000);
// Останавливаем двигатели
motor1.run(RELEASE);
motor2.run(RELEASE);
motor3.run(RELEASE);
motor4.run(RELEASE);
delay(500);
// Разгоняем двигатели в одном направлении
motor1.run(FORWARD);
motor2.run(FORWARD);
motor3.run(FORWARD);
motor4.run(FORWARD);
for (i=0; i<255; i++) {
motor1.setSpeed(i);
motor2.setSpeed(i);
motor3.setSpeed(i);
motor4.setSpeed(i);
delay(10);
}
// Останавливаем двигатели
motor1.run(RELEASE);
motor2.run(RELEASE);
motor3.run(RELEASE);
motor4.run(RELEASE);
delay(500);
// Разгоняем двигатели в обратном направлении
motor1.run(BACKWARD);
motor2.run(BACKWARD);
motor3.run(BACKWARD);
motor4.run(BACKWARD);
for (i=255; i>=0; i—) {
motor1.setSpeed(i);
motor2.setSpeed(i);
motor3.setSpeed(i);
motor4.setSpeed(i);
delay(10);
}
// Останавливаем движение
motor1.run(RELEASE);
motor2.run(RELEASE);
motor3.run(RELEASE);
motor4.run(RELEASE);
delay(500);
}
Драйвер коллекторных двигателей L9110S (HG7881)
Модуль собран на двух микросхемах HG7881 или аналоге L9110S, к модулю можно подключить два маломощных коллекторных или один шаговый двигатель.
Характеристики драйвера L9110S (HG7881):
- Диапазон напряжения питания: 2.5V … 12V.
-
Максимальный ток: 800mA, на каждый канал.
-
Управление логическим уровнем.
-
Встроенные защитные диоды.
-
Рабочая температура: 0℃ … 80℃.
Особенности модуля:
Модуль собран на двух полумостовых драйверах (H-bridge) HG7881, к сожалению подробного даташита на микросхему нет. Хотя и пишут что он предназначен для управления моторами, это не совсем так, у драйвера отсутствует возможность изменять скорость вращения мотора, драйвер способен изменять только направление вращения. По этой причине, данный модуль больше подходит для управления небольшими шаговыми двигателями, нежели коллекторными.
На схеме из даташита видно, что в наличии только входы для управления полумостами и питание.
Принципиальная схема модуля:
Подключение модуля к Arduino:
В случаи подключения коллекторного мотора.
Модуль подключается на два свободных выхода arduino, питание для моторов, если они маломощные и работают от напряжение 5 вольт, можно взять от arduino. Чтобы заставить мотор крутится, нужно на один выход подать логическую единицу и на второй логический ноль. Для изменения направления вращения, нужно инвертировать состояние обеих выходов arduino. подробнее в видео ниже.
код из видео
#define A1_A 8 // выходы на драйвер
#define A1_B 9
void setup(){
pinMode (A1_A, OUTPUT);
pinMode (A1_B, OUTPUT);
}
void loop(){
// включаем мотор на 1 секунды вперед
digitalWrite (A1_A, HIGH);
digitalWrite (A1_B, LOW);
delay(1000);
// выключаем мотор
digitalWrite (A1_A, LOW);
digitalWrite (A1_B, LOW);
delay(1000);
// включаем мотор на 1 секунды назад
digitalWrite (A1_A, LOW);
digitalWrite (A1_B, HIGH);
delay(1000);
// выключаем мотор
digitalWrite (A1_A, LOW);
digitalWrite (A1_B, LOW);
delay(1000);
// плавно увеличиваем скорость
digitalWrite (A1_A, LOW);
for (int i = 0; i < 255; i++){
analogWrite (A1_B, i);
delay(25);
}
delay(2000);
// плавно уменьшаем скорость
digitalWrite (A1_A, LOW);
for (int i = 255; i > 0; i--){
analogWrite (A1_B, i);
delay(25);
}
delay(1000);
}
В случаи подключения биполярного шагового двигателя.
Подключаем обмотки за место коллекторных двигателей. Для работы можно использовать встроенную в среду библиотеку Stepper.h.
Запись опубликована автором admin в рубрике Обзоры с метками H-bridge, L9110S, коллекторный двигатель, шаговый двигатель.
▶▷▶▷ схема подключения электродвигателя на транзисторах
▶▷▶▷ схема подключения электродвигателя на транзисторах| Интерфейс | Русский/Английский |
| Тип лицензия | Free |
| Кол-во просмотров | 257 |
| Кол-во загрузок | 132 раз |
| Обновление: | 13-04-2019 |
схема подключения электродвигателя на транзисторах — Регулятор оборотов электродвигателя : изменение скорости cheboprotehnologiiprimenenie-regulyatorov Cached Железняк или сердечник ротора напрессовывается непосредственно на вал Между ротором и Частотный преобразователь для электродвигателя Школа для electricalschoolinfoeconom721-chastotnyjj Cached Рис 1 Схема частотного преобразователя Входной каскад выпрямляет подаваемое синусоидальное напряжение сети, которое после сглаживания с помощью индуктивно-емкостного фильтра служит источником электропитания Источники питания — radio-schemyru radio-schemyrusupplyhtml?start49 Cached Электронный предохранитель (см рисунок) содержит мощный транзистор vt2, который включен в минусовый провод питания, два стабилизатора тока на полевых транзисторах один регулируемый ( на vt1), в другой Компьютерный блок питания Википедия ruwikipediaorg wikiКомпьютерный Cached Описание Если брать, в качестве примера, блок питания для настольного компьютера персонального стандарта pc, то, согласно спецификации разных лет, он должен обеспечивать выходные напряжения 5 12 3,3 Вольт а также 5 Сборник схем RadioNet radionetcomrushemindexsphp Cached Search datasheet : РЕЙТИНГ: ТЕНДЕРЫ: ИССЛЕДОВАНИЯ: DATASHEETS: КАТАЛОГ СХЕМ Телефонные трубки для прозвонки кабеля Устройство, схема и zametkielectrikarutelefonnye-trubki-dlya-prozvonki Cached Случайные статьи Указательный плакат; Выбор, установка и схема подключения вентилятора era 4s et с таймером в ванную комнату Тиристорные регуляторы мощности Схемы с двумя тиристорами electrikinfomainpraktika815-tiristornye-regulyatory Cached Несколько лучшие результаты дают схемы с использованием двух тиристоров, включенных встречно параллельно: и места не надо для лишних диодов, да и тиристорам работать легче Схемы любительских частотных преобразователей electrikinfomainpraktika545-shemy-lyubitelskih Cached Рисунок 5 Напряжение uрег через резистор r1 также подается на задающий генератор da1, выполненный на микросхеме КР1006ВИ1 (импортный вариант ne555) Why Our Current Education System Is Failing A Boundless World wwwaboundlessworldcom education-system -failing Cached Incredible You are a very talented writer and I completely agree with you You bring up a VERY good point Дифференциальная защита трансформаторов-принцип действия elektronchicruelektrotexnikadifferencialnaya Cached Использование материалов сайта возможно при наличии активной ссылки на первоисточникСвязь с редакцией сайта:bylira3gmailcom Promotional Results For You Free Download Mozilla Firefox Web Browser wwwmozillaorg Download Firefox — the faster, smarter, easier way to browse the web and all of 1 2 3 Next 26
- В отличие от ранее рассматриваемых аналогичных устройств, в данном устройстве обеспечена стабильная
- частота 50 Гц, мощность потребителей может достигать 600Вт, форма напряжения на выходе синусоида (не идеальная), но электродвигатели мощностью до 600Вт работают устойчиво. Современные преобразовател
- е идеальная), но электродвигатели мощностью до 600Вт работают устойчиво. Современные преобразователи частоты предлагают гибкий выбор законов регулирования частоты и напряжения на электродвигателе. Порядок выполнения работы Перед выполнением заданий необходимо собрать схему, показанную на рис. 8. Силовые преобразователи в электроснабжении: Методические указания к выполнению лабораторных работ. Страница 3Читать бесплатно книгу онлайн без регистрации в электронном виде на сайте полнотекстовой электронной библиотеки Единое окно для учащихся ВУЗов… quot;ELDINquot; — Ярославский электромашиностроительный завод. Производство электродвигателей, генераторов, комплектных электроприводов, бытовых вентиляторов, насосов. Продажа промышленных насосов, технические характеристики. Предлагаемое устройство собрано на микроконтроллере ATmega853516PI и управляет дверным замком на основе соленоида или электродвигателя. Даны схемы исполнительных устройств для подключения соленоида или электродвигателя, питаемых постоянным напряжение 12 В… Конденсаторные двигатели разновидность асинхронных двигателей , в обмотки которого включены конденсаторы для создания сдвига фазы тока. 1 Подключаются в однофазную сеть посредством специальных схем. Вывод одной обмотки электродвигателя подключается к фазовому… От его местоположения вдоль платы зависит степень генерируемого импульса на ключ, роль ключа выполняет полевой транзистор (на фото выше обозначен как регулятор скорости вращения). Солнечной шестерни, которая закреплена на валу электродвигателя; Для управления же дискретными приборами и модулями других производителей, требующих отрицательного смещения на затворе, может быть рекомендована схема, изображенная на рис. 4.
бытовых вентиляторов
мощность потребителей может достигать 600Вт
схема подключения электродвигателя на транзисторах Картинки по запросу схема подключения электродвигателя на транзисторах Другие картинки по запросу схема подключения электродвигателя на транзисторах Жалоба отправлена Пожаловаться на картинки Благодарим за замечания Пожаловаться на другую картинку Пожаловаться на содержание картинки Отмена Пожаловаться Видео Мотор на транзисторе с управляющей катушкой Схема Аквадевайс YouTube февр г Реверс мощного электродвигателя постоянного тока Сергей Меркулов YouTube дек г Видеоуроки по Arduino Моторы и транзисторы я серия, ч AmperkaRu YouTube мая г Все результаты Управление мотором постоянного тока с помощью одного wikiamperkaruробототехникаподключениемоторачерезтранзистор Похожие окт г В данной схеме транзистор будет работать в ключевом режиме по одной команде установка уровня HIGH на затворе от Arduino Ардуино управление двигателем постоянного тока, LD Класс robotclassrututorialsarduinodcmotordriver Похожие мая г Подключение драйвера LD к Arduino начинающий робототехник сталкивается с проблемой подключения двигателя к микроконтроллеру В этой схеме можем использовать NPN транзистор NA Схема подключения двигателя Вытяжки в г Diagram, Floor асинхронного двигателя Open схема подключения в распредщитке варочной панле и идухового шкафа через УЗО и автомат Электропроводка, Electronics Шарманка на полевом транзисторе КПА РадиобукА Сергей Электротехника Реверс маломощного электродвигателя electeblogspotcomblogpost_html Похожие июн г Для этого необходимо изменить схему включения двигателя то на трёх транзисторах можно реализовать схему для пуска, остановки Схема типового подключения трехфазного двигателя с питанием digitroderu Схемы авг г Схема соединения трехфазного двигателя и предварительного драйвера полевых транзисторов MCAPEK Транзисторное управление двигателями в схемах на nauchebenet Радиоэлектроника Микроконтроллеры февр г Схемы подключения электродвигателей через транзисторные ключи Диод VD защищает транзистор VT от выбросов напряжения Предлагают рационализаторы ЮжноУральской магистрали wwwtsiruatshtml Похожие Схема индикатора питается от одного элемента ЦНК, Транзисторы VT и VT должны иметь одинаковые не менее коэффициенты усиления ВТОРИЧНОЕ ИСПОЛЬЗОВАНИЕ ЭЛЕКТРОДВИГАТЕЛЯ СЛК Клеммы К нужны для подключения питания к реле ИВГ, ИМВШ; К для Arduino подключение двигателя постоянного тока и управление им geekmaticinuaarduino_motor_control Похожие Схемы подсоединения двигателей постоянного тока к контроллерам Arduino различными Управляем электродвигателем при помощи транзисторов Подключение электромотора к Arduino Хабр Habr янв г Два транзистора работают как составной транзистор , нужно это для Схема проста и позволяет крутить двигатель только в одном Схема и принцип работы Hмоста для управления двигателями Уроки Ардуино Как управлять полярностью двигателя с помощью электронных компонентов ? Нмост на транзисторах позволяет с помощью управляющих сигналов TBFNG допускает подключение двух коллекторных двигателей или Как подключить к устройству нагрузку? Сайт Паяльник cxemnet Начинающим Похожие мар г В данной схеме применен npn транзистор , включенный по схеме ОЭ составляет десятки амперособо мощные электродвигатели , Arduino двигатель собираем и программируем устройство Уроки апр г Для включения и управления скоростью двигателя используются Транзистор в этом примере завершает схему двигателя на землю Самые простые схемы управления вращением двигателя Перейти к разделу Мостовая схема на транзисторах ,управляемая от микроконтроллера Мостовая схема на транзисторах ,управляемая от Управление двигателем постоянного тока joytaru wwwjoytaru Измерение и контроль Похожие нояб г Управление двигателем при помощи биполярного транзистора Самый простой способ приведения в действие двигателя показан ниже Схема такого подключения , как правило, выглядит следующим образом Китайцы и реверс DC моторов четырьмя транзисторами Аппаратная arduinoru Форумы Аппаратные вопросы Похожие апр г сообщения авторов На транзисторах маркировка SD Я в свое время делал такой драйвер двигателя управление мя пинами, как и хочет автор К недостаткам данной схемы включения можно отнести невысокое входное Микросхемы драйверов реверсируемых двигателей постоянного wwwgawru Статьи Источники питания Выбор необходимого драйвера и схемы включения можно сделать, тока лежит Нмост на биполярных транзисторах , режим работы которого задается двумя Драйвер одного реверсируемого двигателя постоянного тока Схемы любительских частотных преобразователей Electrikinfo electrikinfomainpraktikashemylyubitelskihchastotnyhpreobrazovateleyhtml Похожие Подключение двигателя к выходу трехфазного инвертора Выходной транзистор оптрона в этой схеме также выполняет функцию дополнительного Как подключить трехфазный электродвигатель в сеть Вт Подключение и установка Схема подключения трехфазного электродвигателя на через конденсаторы транзисторы из серии VT, VT;; резисторы МЛТ;; кремниевые Схема управления двигателя Лабораторная работа Unity Pro Рис Схемы подключения электродвигателей через транзисторные ключи продолжение в транзисторы VT, VT соединяются параллельно Схема реверса электродвигателя Реверс электродвигателя Реверсивная схема подключения х фазного электродвигателя Схема Каждый полумост состоит из двух транзисторов один из которых с каналом n Драйвер для коллекторного двигателя на полевых транзисторах RC Форум forumrcdesignru Cамолёты Общий Аппаратура радиоуправления Похожие сент г Параметры двигателя питание В мощьность до Вт Схема Прямое подключение транзистора к порту микроконтроллера, я это Трехфазный двигатель в однофазной сети без конденсаторного мар г Если собрать обмотки асинхронного электродвигателя по схеме Оптимальными считаются схемы подключения обмоток в звезду или который управляется прямым и обратным биполярными транзисторами Схемы подключения и управление твердотельными реле Рейтинг , голосов янв г Схемы подключения твердотельных реле для переменного и постоянного тока Управление транзистором PNP, НО реле; Управление Выбор теплового реле для электродвигателя ; Реле напряжения Самодельный преобразователь с B на В типы, схемы Электрика компонентов Такое устройство будет полезно для подключения бытовых приборов в автомобиле Установка более мощного транзистора Схема подключения эл двигателя на В Сабвуфер своими wwwradiochipirushemapodklyucheniyaeldvigatelyanav Подключения электродвигателя с конденсатором Электрический двигатель В можно подключить на В с помощью дополнительного Частотный преобразователь виды, принцип действия, схемы electricalschoolinfoelprivodchastotnyjjpreobrazovatelvidyprinciphtml Похожие Для включения режима торможения двигателя в схему может быть установлен управляемый транзистор с мощным резистором, рассеивающим Регулирование оборотов двигателя постоянного Радио для всех wwwjunradiocomblogregulirovanie_oborotov_dvigatelja Похожие нояб г Мостовая схема на транзисторах кт Схема для Для этого необходимо изменить схему включения двигателя Рисунок Схема Твердотельное реле схема, обзор цен, принцип работы Asutpp Главная Электрооборудование Рейтинг голос окт г Схема включения твердотельного реле применяют для электродвигателя , станочного оборудования и прочих отраслей промышленности Но, перед тем как подключить твердотельное реле на транзисторах Проект Транзистор MOSFET Показываем усилительные Для регулирования скорости двигателя будем использовать потенциометр Схема подключения элементов для данного эксперимента показана на рис Мой первый радиоуправляемый робот на Arduino Записки мар г Типичная схема подключения электродвигателя превосходно построенная на транзисторах и логических вентилях никакой магии Трехфазный двигатель в однофазной сети без конденсаторов stroysvoydomrutrexfaznyjdvigatelvodnofaznojsetibezkondensatorov Похожие мар г Пошаговая инструкция применения конденсаторов для Подключение трехфазного двигателя в однофазную цепь вопрос актуальный GPHUD вынесен , применены полевые транзисторы IGBT Мостовая схема управления двигателем постоянного тока Раздел Похожие Мостовая схема состоит из четырех транзисторов некоторые используют МОП что вызовет изменение направления вращения вала двигателя Ответ В объем испытаний входитопределение возможности включения без Частотный преобразователь частотник для асинхронного tokidetru Электрооборудование Электродвигатели Похожие Частотный преобразователь для электродвигателя и принцип работы ключи из IGBT Биполярный транзистор с изолированным затвором, Для работы двигателя нам необходима схема подключения обмоток треугольник Схема подключения электродвигателя, подключение трехфазного Схема подключения электродвигателя во многом определяется условиями его эксплуатации Не найдено транзисторах Схемы подключения трёхфазного двигателя в однофазную сеть Элементы электрики Двигатели Рейтинг , голосов Способы включения трёхфазного двигателя в домашнюю сеть на В Подключение с помощью резисторов, конденсаторов и частотного Видеоурок Моторы и транзисторы РОБОТОША robotosharuarduinovideolessontransistorservodcmotorhtml Похожие Рейтинг голосов июн г Двигатель постоянного тока имеет двухпроводное подключение Скоростью двигателя постоянного тока, можно управлять или, точнее, аналог потенциометра регулятора громкости, и схемы управления Силовой ключ А; В на полевом транзисторе IRF Исполнительные устройства дек г В на полевом транзисторе IRF MOSFET для Arduino , описание, схемы , транзисторе IRF и предназначен для включения выключения скорость работы электродвигателя или яркость светодиодной Подключение трехфазного двигателя к Electroshemaru electroshemaru Энергетика Кроме того, затруднён запуск двигателя под нагрузкой В предлагаемой статье описан метод подключения двигателя без потери мощности Электрические схемы Проводка в квартире и доме своими руками remontrushemaphp Похожие эл схем Например, электрическая схема подключения трехфазных двигателей Основные схемы подключения транзисторов полевых и биполярных Типовые схемы Схемы подключения трёхфазных электродвигателей Датчик вращения Схема самодельного датчика контролирующего wwwtexnicrukonstravtomatikaavtomatikahtml Похожие Датчик вращения двигателя схема на транзисторах Датчик вращения Электродвигатель подключается к самодельной конструкции строго с Электропривод просто, как раз, два, три Часть wwwkiteruarticlespowerel__php автор С Волошин Драйвер мощных транзисторов с полевым управлением предназначен для Рис Схемы включения драйверов Модули драйвера МД, МД, Управление реле с помощью ArduinoArduinodiycom arduinodiycom Arduino для начинающих Похожие Используем транзистор , реле и внешний источник питания для управления мощными внешними Схема подключения транзистора и реле к Arduino Драйверы униполярного и биполярного шагового двигателя mypracticrudrajveryshagovogodvigatelyaunipolyarnyjbipolyarnyjlnhtml Похожие февр г На биполярных транзисторах ключи с такими параметрами создать не Схема подключения униполярного шагового двигателя Частотный преобразователь принцип работы, схема onlineelektrikru Электрооборудование Электродвигатели Похожие Электродвигатель при пуске потребляет большой ток, который Частотный преобразователь принцип работы, схемы подключения и критерии выбора специальные микросхемы управления или инвертор на транзисторах Транзистор Википедия Похожие Транзи́стор англ transistor, полупроводнико́вый трио́д радиоэлектронный компонент Для включения в схему транзистор должен иметь четыре вывода два входных и два выходных накаливания и нагревательных приборов, а также импульсные источники питания, приводы электродвигателей Устройства для пуска электродвигателей или электромашинных wwwfreepatentru МПК Раздел H H HP HP Похожие Коллекторы нечетных транзисторов и эмиттеры четных транзисторов каждого Техническим результатом является упрощение схемы подключения Управление реверсивным электродвигателем Архив Форум АСУ ТП окт г сообщения авторов Имеется асинхронный реверсивный электродвигатель РД Вы привели заводскую схему подключения А про транзисторы Схемы подключения трехфазных электродвигателей дек г Схемы подключения трехфазных электродвигателей Изменение направления вращения электродвигателя Схема реверса Не найдено транзисторах Вместе с схема подключения электродвигателя на транзисторах часто ищут подключение мотора к ардуино через транзистор управление двигателем постоянного тока с помощью arduino arduino управление мощным двигателем управление двигателем постоянного тока реверс управление двигателем постоянного тока шим реверс двигателя постоянного тока на полевых транзисторах arduino драйвер двигателя arduino реверс двигателя Документы Blogger Hangouts Keep Jamboard Подборки Другие сервисы
В отличие от ранее рассматриваемых аналогичных устройств, в данном устройстве обеспечена стабильная частота 50 Гц, мощность потребителей может достигать 600Вт, форма напряжения на выходе синусоида (не идеальная), но электродвигатели мощностью до 600Вт работают устойчиво. Современные преобразователи частоты предлагают гибкий выбор законов регулирования частоты и напряжения на электродвигателе. Порядок выполнения работы Перед выполнением заданий необходимо собрать схему, показанную на рис. 8. Силовые преобразователи в электроснабжении: Методические указания к выполнению лабораторных работ. Страница 3Читать бесплатно книгу онлайн без регистрации в электронном виде на сайте полнотекстовой электронной библиотеки Единое окно для учащихся ВУЗов… quot;ELDINquot; — Ярославский электромашиностроительный завод. Производство электродвигателей, генераторов, комплектных электроприводов, бытовых вентиляторов, насосов. Продажа промышленных насосов, технические характеристики. Предлагаемое устройство собрано на микроконтроллере ATmega853516PI и управляет дверным замком на основе соленоида или электродвигателя. Даны схемы исполнительных устройств для подключения соленоида или электродвигателя, питаемых постоянным напряжение 12 В… Конденсаторные двигатели разновидность асинхронных двигателей , в обмотки которого включены конденсаторы для создания сдвига фазы тока. 1 Подключаются в однофазную сеть посредством специальных схем. Вывод одной обмотки электродвигателя подключается к фазовому… От его местоположения вдоль платы зависит степень генерируемого импульса на ключ, роль ключа выполняет полевой транзистор (на фото выше обозначен как регулятор скорости вращения). Солнечной шестерни, которая закреплена на валу электродвигателя; Для управления же дискретными приборами и модулями других производителей, требующих отрицательного смещения на затворе, может быть рекомендована схема, изображенная на рис. 4.
Ардуино управление двигателем | Академия робототехники
Ардуино управление двигателем, как это осуществить, зачем нам нужен контроллер двигателей? Не можем ли мы просто подключить двигатели непосредственно к Arduino или ESP8266, как светодиод или любой другой компонент? К сожалению нет. Выходные порты микроконтроллера не способны выдержать ток, потребляемый большинством электродвигателями. Максимальный ток на выводах большинства микроконтроллеров составляет 40 мА. Маленький желтый электромотор, используемый в вашем роботе, может легко превзойти его, потребляя ток 500 мА и выше.
TB6612FNG можно использовать для привода в действие одного или двух моторов, имеющих диапазон питания по напряжению 2,5 В до 13,5 В, по номинальному постоянному току 1,2 А, и пиковому току 3,2 А (на канал), т. е. это потребляемый ток, когда вы удерживаете кратковременно мотор в неподвижном состоянии, такая ситуация происходить очень часто при движении робота. Микросхема собрана на двух стандартных H-образных мостах на полевых транзисторах, позволяющих не только контролировать направление (против часовой стрелки /по часовой) и скорость вращения моторов, а также тормозить и останавливать их.
Две пары входных сигналов (AIN1, AIN2 и BIN1, BIN2) могут использоваться для управления двумя двигателями в одном из четырех функциональных режимов — CW, CCW, короткое торможение и останов. Два выхода двигателя (A и B) могут управляться отдельно, скорость каждого двигателя регулируется с помощью входного сигнала PWM с частотой до 100 кГц. Чтобы вывести двигатель из режима ожидания, на вывод STBY следует подать высокий логический уровень.
Кроме того необходимо учитывать, какой тип моторов Вы собираетесь использовать, существуют различные типы двигателей (шаговые, постоянного тока, бесщеточные), поэтому необходимо знать, а подойдет ли контроллер к Вашему типу моторов.
Микросхема контроллера двигателя — TOSHIBA TB6612FNG:
БЫСТРЫЙ ПРОСМОТР СПЕЦИФИКАЦИЙ КОНТРОЛЛЕРА ДВИГАТЕЛЯ TB6612FNG
- Два независимых канала двунаправленного управления двигателем
- Диапазон логического напряжения микросхемы 2,7 Вольт — 5,5 Вольт
- Диапазон напряжения питания двигателя 2,5 Вольт — 13,5 Вольт
- Ток выхода — 1 Aмпер непрерывный, максимальный 3 Aмпер на канал. Имеется возможность переводить каналы на двойной выход.
АРДУИНО УПРАВЛЕНИЕ ДВИГАТЕЛЕМ И/ИЛИ ДВИГАТЕЛЯМИ | СХЕМА ПОДКЛЮЧЕНИЯ
Arduino UNO мы приобрели в магазине FYD Open Source Hardware
Контроллер для двух моторов 1А TB6612FNG приобрели там же в FYD Open Source Hardware
Роботележку, вместе с акриловой рамой, двумя моторами с колесами, роликами, корпусом для батарей и дисками для энкодеров
приобретали в магазине IGMOPNRQ module Store
Соединительные провода приобретали в магазине IGMOPNRQ module Store
Конденсаторы 0,1 мкФ — 1,0 мкФ приобрели в магазине Fantasy Electronics CO., Ltd
АРДУИНО УПРАВЛЕНИЕ ДВИГАТЕЛЕМ | ПОДРОБНОЕ ОПИСАНИЕ КОНТРОЛЛЕРА ДВИГАТЕЛЕЙ НА МИКРОСХЕМЕ TB6612FNG
Правая сторона
- VM — плюс аккумуляторной батареи электродвигателей (2,5 В -13,5 В по номинальному постоянному току 1,2 А, и пиковому току 3,2 А)
- VCC — напряжение питания логики от микроконтроллера для питания микросхемы и интерфейса с микроконтроллером (2,7 В — 5,5 В).
- GND — общая земля для напряжения двигателя и логического напряжения (все контакты GND подключены вместе)
- AO1 — Выход на (-) вывод двигателя A .
- AO2 — выход на (+) вывод двигателя A .
- BO2 — выход на (+) вывод двигателя B .
- BO1 — выход на (-) вывод двигателя B .
- GND — минус аккумуляторной батареи электродвигателей.
Левая сторона
- PWMA — вход управлением скоростью вращения электродвигателем A подключается к выходу PWM (ШИМ) микроконтроллера
- AIN2 — вход 2, определяющий направление вращения двигателя А, подключается к одному из цифровых выходов микроконтроллера
- AIN1 — вход 1, определяющий направление вращения двигателя А, подключается к одному из цифровых выходов микроконтроллера
- STBY — вход ожидания цифровой вывод на микроконтроллере или привязка к VCC
- BIN1 — вход 1, определяющий направление вращения двигателя B, подключается к одному из цифровых выходов микроконтроллера
- BIN2 — вход 2, определяющий направление вращения двигателя B, подключается к одному из цифровых выходов микроконтроллера
- PWMB — вход управлением скоростью вращения электродвигателем B подключается к выходу PWM (ШИМ) микроконтроллер
- GND — минус питания GND микроконтроллера и управления микросхемы TB6612FNG
Прежде всего, ничего не произойдет, если вывод STBY не имеет высокого уровня (логическая 1). Можно подключить этот вывод к микроконтроллеру и управлять им программно, либо просто выставить на нём логическую единицу подав на него питание с вывода VCC микросхемы TB6612FNG .
Если вы хотите, чтобы двигатель A повернулся по часовой стрелке, установите AIN1 в HIGH, AIN2 — LOW, PWMA — ШИМ
Если вы хотите, чтобы двигатель A повернулся против часовой стрелки, установите AIN1 в LOW, AIN2 — HIGH, PWMA -ШИМ
Если вы не хотите использовать управление скоростью PWM для двигателей, вы можете просто связать контакты PWMA и PWMB с VCC. В случае Arduino это будет эквивалент AnalogWrite (5,255) ;. Также в отношении значений ШИМ — вам необходимо определить минимальный рабочий цикл ШИМ для минимальной скорости, с которой вы можете управлять своими двигателями. Установите значение ШИМ слишком низко, и вы можете поместить двигатель в состояние сваливания, которое будет потреблять слишком много тока. Низкие значения PWM также могут приводить к отрывистому режиму работы.
В моем конкретном случае для минимальной скорости работы моторов было необходимо значение ШИМ равное 35. Это будет функцией вашего источника питания двигателя, размера двигателя и веса вашего робота.
Теперь, когда вы можете контролировать направление и скорость вращения каждого двигателя, вы можете легко управлять своим роботом. На нашем роботе (с двумя приводными колесами и двумя опорными свободно вращающемися колесиками от мебели) вращающийся двигатель A и B в одном направлении с одной и той же скоростью будет приводить к относительно прямому движению в этом направлении. Вращайте двигатели в противоположных направлениях, и вы получите очень быстрый поворот нулевого радиуса. Вы можете экспериментировать с разными значениями для разных типов поворотов.
Из-за сочетания плохого дизайна шасси и дешевых «желтых» китайских двигателей, скорость на каждом двигателе немного отличается. Вы можете компенсировать, изменив рабочий цикл ШИМ для одного из двигателей. Например, вы можете обнаружить, что вам необходимо установить двигатель A на 255 и двигатель B на 249 для движения по прямой линии. Для калибровки может потребоваться небольшое экспериментирование.
Каждый вывод и его функции описаны в таблице ниже.
| AIN1 / BIN1 | AIN2 / BIN2 | PWMA / PWMB | A01 / B01 | A02 / B02 | Режимы работы электромоторов |
|---|---|---|---|---|---|
| HIGH | HIGH | HIGH/LOW | LOW | LOW | Short brake — Торможение на небольшой промежуток времени, обычно указывается время в миллисекундах (1/1000 секунды) |
| LOW | HIGH | HIGH | LOW | HIGH | CCW — Вращение по часовой стрелке |
| LOW | HIGH | LOW | LOW | LOW | Short brake — Торможение на небольшой промежуток времени, обычно указывается время в миллисекундах (1/1000 секунды) |
| HIGH | LOW | HIGH | HIGH | LOW | CW — Вращение против часовой стрелке |
| HIGH | LOW | LOW | LOW | LOW | Short brake — Торможение на небольшой промежуток времени, обычно указывается время в миллисекундах (1/1000 секунды) |
| LOW | LOW | HIGH | OFF | OFF | Stop — Стоп |
АРДУИНО УПРАВЛЕНИЕ ДВИГАТЕЛЕМ | БИБЛИОТЕКА
В Интернете хватает уже готовых программ (скетчей) для работы Arduino с микросхемой TB6612FNG, но мы не ищем легких путей, нам нужна универсальная программа на все случаи жизни Заодно вспомним как подключается библиотека в нашей незабвенной ArduinoIDE. В процессе решения задачи, выучим язык С++ .
Библиотека — это универсальная программа, уже кем то для нас с Вами написанная, с уже готовыми функциями предназначенными для решения конкретной задачи. Нам остается загрузить библиотеку в ArduinoIDE и указать ей куда мы её загрузили. Ну и конечно, при самостоятельном написании программы (скетча) в самом начале скетча, подключить библиотеку в виде файла с расширением .h , например так: #include <SparkFun_TB6612.h>
- для начала загружаем библиотеку от компании SparkFun Electronics по этой ссылке, или качаем последнюю версию из их же репозитория на GitHub, в любую папку на Вашем компьютере, главное не забыть в какую, в дальнейшем понадобится.
2. Запускаем ArduinoIDE. Жмем: Скетч (1) -> Подключить библиотеку(2) -> Добавить ZIP Библиотеку . . .(3)
3. В левой части (Folders), появившегося окна, ищем ту самую папку в которую мы загрузили библиотеку от компании SparkFun Electronics (см. пункт 1.) . В правой части (Files) находим и подсвечиваем заархивированный (.ZIP) файл: SparkFun_TB6612FNG_ Arduino_ Library_master.zip, нажимаем OK (стрелка 1)
4. В нижней части следующего появившегося окна (черная часть для сообщений), читаем сообщение: Библиотека добавлена. Проверьте меню «Подключить библиотеку»
5. Проверяем меню «Подключить библиотеку». Жмем: Скетч (1) -> Подключить библиотеку(2) — в раскрывшемся длинном списке, почти в самом конце обнаруживаем библиотеку SparkFun TB6612FNG Мотор Driver Library(3).
6. Запускаем пример программы (скетча) от SparkFun TB6612FNG Мотор Driver. Жмем: Файл (1) -> Примеры(2) -> в раскрывшемся длинном списке, почти в самом конце, обнаруживаем библиотеку SparkFun TB6612FNG Мотор Driver Library(3) -> и пример МоторTestRun(4)
7. Получаем пример программы (скетча) от SparkFun МоторTestRun. Она состоит из изменяемых входных данных и функций библиотеки SparkFun_TB6612.h
АРДУИНО УПРАВЛЕНИЕ ДВИГАТЕЛЕМ | ПРОГРАММА (СКЕТЧ)
TestRun.ino
TB6612FNG H-Bridge Motor Driver Example code
Michelle @ SparkFun Electronics
8/20/16
https://github.com/sparkfun/SparkFun_TB6612FNG_Arduino_Library
Программа предназначена для управления 2 моторами, чтобы показать примеры функций в библиотеке. Ваш
робот, по заданной программе, выполнит каждое движение в прямом и противоположное направлении,
поэтому, если ваши моторы сбалансированы, робот должен оказаться в том же месте, где и
начинал движение.
Resources:
TB6612 SparkFun Library
Development environment specifics:
Developed on Arduino 1.6.4
Developed with ROB-9457
******************************************************************************/
// Подключаем библиотеку SparkFun_TB6612.h которая содержит class Motor и все
// функции для этого класса
#include <SparkFun_TB6612.h>
// #define DEFAULTSPEED 255
// Определяем контакты для всех входов/выходов,(не забудьте сравнить номера контактов на схеме и в программе они различаются)
// Самое главное, чтобы входы PWMA PWMB на микросхеме TB6612FNG были соединены с выходами ШИМ на стороне Arduino,
// обычно кроме номера имеют тильду "~" в своем обозначении. Эти выводы управляют скоростью вращения моторами.
#define AIN1 2
#define BIN1 7
#define AIN2 4
#define BIN2 8
#define PWMA 5
#define PWMB 6
#define STBY 9
// Если, после сборки Вашего робота, моторы вращаются не в том направлении, например при выполнении функции forward, чтобы не перепаивать
// провода на моторах, проще изменить значения этих констант. Значение констант могут быть 1 или -1.
const int offsetA = 1;
const int offsetB = 1;
// Инициализация моторов. Создаём ОБЪЕКТЫ motor1 и motor2 КЛАССА Motor, прописанного в библиотеке SparkFun_TB6612.h
Motor motor1 = Motor(AIN1, AIN2, PWMA, offsetA, STBY);
Motor motor2 = Motor(BIN1, BIN2, PWMB, offsetB, STBY);
void setup()
{
//Здесь ничего
}
void loop()
{
// К объекту motor1 применим метод drive() с аргументами: скорости от -225 до 225
// и продолжительности (этот аргумент не обязателен) вращения в миллисекундах. Отрицательная скорость переключает мотор
// на вращение в обратном направлении.
// Тормозим функцией brake(). И делаем паузу delay() в 1 секунду.
motor1.drive(255,1000);
motor1.drive(-255,1000);
motor1.brake();
delay(1000);
//Аналогичные действия применим к объекту motor2.
motor2.drive(255,1000);
motor2.drive(-255,1000);
motor2.brake();
delay(1000);
// Для движения вперед используем функцию forward(), у которой в качестве аргументов два объекта motor1, motor2
// и скорость (аргумент не обязателен). Если для скорости используются отрицательные числа,
// то получим движение назад
forward(motor1, motor2, 150);
delay(1000);
// Для движения назад используем функции back(), с аргументами аналогичными функции forward()
// если значение скорости отрицательно, то получаем движение назад.
back(motor1, motor2, -150);
delay(1000);
// Использование функции торможения, которая принимает в качестве аргументов два двигателя.
// Обратите внимание, что функции не останавливают двигатели сами по себе.
brake(motor1, motor2);
delay(1000);
// Для поворота или разворота на месте классической двухколесной тележки робота, используем функции поворот на лево left()
// и поворот на право right(), которые принимают в качестве аргументов два
// мотора и скорость. Эти функции заставляют оба двигателя вращаться в разных направлениях со скоростью в 2 раза меньшей указанной в
// этих функциях.
left(motor1, motor2, 100);
delay(1000);
right(motor1, motor2, 100);
delay(1000);
//Use of brake again.
brake(motor1, motor2);
delay(1000);
}
Для тех кто хочет подробнее разобраться с примером МоторTestRun прилагаем листинг библиотеки SparkFun_TB6612.h и исходный
текст SparkFun_TB6612.cpp
Блок схема подключения с микроконтроллеру и моторам микросхемы — TOSHIBA TB6612FNG:
Все модули
Модуль контроллера моторов от WeMos на микросхеме
TB6612FNG с интерфейсом I2C на микроконтроллере STM32Компания WeMos Electronics в 2014 году предложила простую идею, на основе микроконтроллера ESP8266 от компании Espressif Systems, спроектировала единого размера небольшие совместимые модули как для центрального микроконтроллера так и для различных периферийных устройств сочленяемых в виде этажерки, контакты которой совместимы сквозным соединением. В дальнейшем компания WeMos Electronics выпустила несколько серий модулей, для пользователей отличительными особенностями модулей различных серий является размер модуля, его цвет или как сделано в первой серии для совмещения ножек питания 3,3 Вольта в плате сделан вырез например как на ниже представленном модуле контроллера моторов WeMos на микросхеме TB6612FNG. Чтобы не занимать 7 котактов микроконтроллера ESP8266 для управления микросхемой TB6612FNG на модуле установлен микроконтроллер STM32, который общаясь с модулем ESP8266 через шину I2C используя всего 2 контакта ESP8266, тем самым предоставляя другим модулям свободные контакты основного модуля ESP8266.
Подробнее про это устройство в нашей следующей статье: WEMOS МОДУЛЬ
Все модули WeMos мы приобретали здесь (картинка кликабельна):
Как управлять двигателем постоянного тока с помощью Arduino
Подключив микросхему моста L298 к Arduino, вы можете управлять двигателем постоянного тока.
Электродвигатель постоянного или постоянного тока является наиболее распространенным типом электродвигателя. Двигатели постоянного тока обычно имеют всего два вывода, один положительный и один отрицательный. Если вы подключите эти два провода напрямую к батарее, двигатель будет вращаться. Если поменять местами провода, двигатель будет вращаться в противоположном направлении.
Для управления направлением вращения двигателя постоянного тока без изменения способа подключения выводов можно использовать схему, называемую H-мостом.H-мост — это электронная схема, которая может управлять двигателем в обоих направлениях. Н-мосты используются во многих различных приложениях, одним из наиболее распространенных является управление двигателями в роботах. Он называется H-мостом, потому что он использует четыре транзистора, соединенных таким образом, что принципиальная схема выглядит как «H».
Вы можете использовать дискретные транзисторы, чтобы сделать эту схему, но для этого урока мы будем использовать L298 H-Bridge IC. L298 может управлять скоростью и направлением двигателей постоянного тока и шаговых двигателей, а также может управлять двумя двигателями одновременно.Его номинальный ток составляет 2А для каждого двигателя. Однако при таких токах вам придется использовать радиаторы.
Распиновка L298 показана ниже. Вы можете найти техническое описание L298 на http://www.tech.dmu.ac.uk/~mgongora/Resources/L298N.pdf.
L298 Распиновка (вид сверху)
Требуемое оборудование
- 1 x L298 мост IC
- 1 x двигатель постоянного тока
- 1 модуль Arduino Mega2560
- 1 макет
- 10 перемычек
На схеме выше показано, как подключить L298 IC для управления двумя двигателями.Для каждого двигателя имеется три входных контакта, включая Input1 (IN1), Input2 (IN2) и Enable1 (EN1) для Motor1 и Input3, Input4 и Enable2 для Motor2.
Поскольку в этом руководстве мы будем управлять только одним двигателем, мы подключим Arduino к IN1 (контакт 5), IN2 (контакт 7) и Enable1 (контакт 6) микросхемы L298. Контакты 5 и 7 являются цифровыми, то есть входами ВКЛ или ВЫКЛ, а контакту 6 требуется сигнал с широтно-импульсной модуляцией (ШИМ) для управления скоростью двигателя.
В следующей таблице показано, в каком направлении будет вращаться двигатель на основе цифровых значений IN1 и IN2.
| IN1 | IN2 | ДВИГАТЕЛЬ |
|---|---|---|
| 0 | 0 | ТОРМОЗ |
| 1 | 0 | ПЕРЕДНИЙ |
| 0 | 1 | НАЗАД |
| 1 | 1 | ТОРМОЗ |
Вывод IN1 микросхемы L298 подключен к выводу 8 Arduino, а IN2 — к выводу 9. Эти два цифровых вывода Arduino управляют направлением двигателя.Контакт EN A микросхемы подключен к контакту 2 PWM Arduino. Это будет контролировать скорость двигателя.
Чтобы установить значения выводов 8 и 9 Arduino, мы будем использовать функцию digitalWrite (), а для установки значения вывода 2 мы будем использовать функцию using analogWrite ().
Ниже фото установки.
Код
const int pwm = 2; // инициализируем вывод 2 как ШИМ
const int in_1 = 8;
константа int in_2 = 9;
// Для обеспечения логики L298 IC для выбора направления двигателя постоянного тока
установка void ()
{
pinMode (pwm, ВЫХОД); // мы должны установить вывод PWM как выход
pinMode (in_1, ВЫХОД); // Логические выводы также устанавливаются как выход
pinMode (in_2, ВЫХОД);
}
пустой цикл ()
{
// Для движения по часовой стрелке in_1 = High, in_2 = Low
digitalWrite (in_1, HIGH);
digitalWrite (in_2, LOW);
analogWrite (pwm, 255);
/ * установка ШИМ двигателя на 255
мы можем изменить скорость вращения
путем изменения ввода pwm, но мы только
используя Arduino, поэтому мы используем самое высокое
значение для привода двигателя * /
// По часовой стрелке на 3 секунды
задержка (3000);
// Для тормоза
digitalWrite (in_1, HIGH);
digitalWrite (in_2, HIGH);
задержка (1000);
// Для движения против часовой стрелки - IN_1 = LOW, IN_2 = HIGH
digitalWrite (in_1, LOW);
digitalWrite (in_2, HIGH);
задержка (3000);
// Для тормоза
digitalWrite (in_1, HIGH);
digitalWrite (in_2, HIGH);
задержка (1000);
}
двигатель постоянного тока.ino.zip
Настройка управления двигателем Arduino
- Подключите 5 В и землю IC к 5 В и земле Arduino.
- Подключите двигатель к контактам 2 и 3 микросхемы.
- Подключите IN1 микросхемы к контакту 8 Arduino.
- Подключите IN2 микросхемы к выводу 9 Arduino.
- Подключите EN1 IC к контакту 2 Arduino.
- Подключите SENS Контакт IC к земле.
- Подключите Arduino с помощью USB-кабеля Arduino и загрузите программу в Arduino с помощью программного обеспечения Arduino IDE или веб-редактора Arduino.
- Обеспечьте питание платы Arduino, используя блок питания, аккумулятор или USB-кабель.
Теперь двигатель должен вращаться сначала по часовой стрелке (CW) в течение 3 секунд, а затем против часовой стрелки (CCW) в течение 3 секунд.
Видео
Попробуйте сами! Получите спецификацию.
Как использовать двигатели постоянного тока в Arduino
В этом руководстве вы сможете получить некоторую информацию о двигателях постоянного тока Arduino.Двигатель постоянного тока — самый простой из электродвигателей, который используется во всех типах хобби-электроники. В этом руководстве представлена основная информация о двигателях постоянного тока, а также о том, как их можно подключить. его к вашему Arduino, и как вы можете использовать его с Ozeki 10. Документ также включает диаграммы и видео, которые помогут вам понять концепцию двигателей постоянного тока. Итак, приступим.
Что такое двигатель постоянного тока Arduino?
Двигатель постоянного тока (двигатель постоянного тока) — наиболее распространенный тип двигателя.Двигатели постоянного тока обычно имеют только два вывода, один положительный и один отрицательный. Если вы подключите эти два вывода непосредственно к батарее, двигатель будет вращаться. Если вы поменяете отведения, двигатель будет вращаться в обратном направлении.
Как использовать двигатель постоянного тока Arduino?
Для работы с двигателями постоянного тока вам необходимо подключить три контакта, как показано на схеме подключения. показывает это (Рисунок 1). Один должен быть подключен к земле (Gnd), другой — к мотор к выводу 5В.Третий контакт должен быть подключен к выводу PWM на вашем Ардуино. С подключенным двигателем постоянного тока теперь вы сможете им управлять. Вы можете настроить скорость вращения двигателя в диапазоне от 0 до 255.
Схема подключения двигателя постоянного токаArduino
Рисунок 1 — Схема подключения двигателей постоянного тока Arduino
Как использовать двигатели постоянного тока Arduino в Ozeki
Контроллер двигателя постоянного тока соединяет ваши двигатели постоянного тока с программным обеспечением Ozeki. Вы можете подключить до двух двигателей постоянного тока через любую микросхему драйвера двигателя L298N.Этот чип интегрирован в плату контроллера двигателя постоянного тока LM298, а также в драйвер двигателя постоянного тока Ozeki. Вы можете изменить направление и скорость движения двигателя для обоих двигателей с помощью Ozeki. Электродвигатели должны питаться от внешнего источника питания с максимальным напряжением 36 В. Чтобы использовать двигатель постоянного тока в Ozeki, вам сначала нужно загрузить Ozeki Robot Developer. Озэки Robot Developer установит библиотеки Arduino, необходимые для эффективного использования этого датчика.
Скачать Ozeki Robot Developer
После установки Ozeki Robot Developer вам необходимо загрузить код управления двигателем постоянного тока. к вашему Arduino.Вы можете найти код и инструкции по загрузке на следующих страницах. Процесс загрузки состоит из двух шагов: сначала вам нужно отформатировать EEPROM Arduino, тогда вам нужно загрузить контрольный код. Процедура очень проста, требуется всего лишь несколько секунд.
Загрузите код двигателя постоянного тока в Arduino Uno
Загрузите код двигателя постоянного тока в Arduino Mega 2560
Загрузите код двигателя постоянного тока в Arduino Nano
Загрузите код двигателя постоянного тока в Ozeki Matrix
Загрузите код двигателя постоянного тока в Raspberry Pi
Моторы arduino и Ozeki будут обмениваться данными через порт USB, используя протокол двигателя постоянного тока Ozeki.Этот Протокол позволяет вам использовать мотор прямо на вашем ПК. Вы сможете управлять этим двигателем через Интернет. пользовательский интерфейс или вы сможете общаться с ним с помощью Ozeki Chat. Вы можете узнать больше об управлении чатом на следующей странице.
Как общаться с двигателем постоянного тока с помощью чата
Важно понимать управление чатом, потому что когда вы создаете робота, вы хотите управлять этим двигателем, отправляя и получая сообщения.если ты откройте приложение Ozeki Robot Developer, вы увидите, кому вы можете написать C # .Net программа для работы с этим мотором.
Шаги подключения
- Подключите двигатель постоянного тока к Arduino
- Подключите плату Arduino к компьютеру
- Проверьте COM-порты, чтобы узнать, подключен ли ваш Arduino
- Загрузите пример кода в Arduino
- Откройте https: // localhost: 9515 в своем браузере
- Выберите подключение вашего двигателя постоянного тока
- Настроить атрибуты двигателя постоянного тока
- Нажмите «Обновить», чтобы проверить двигатель постоянного тока.
Обзор системы
Предлагаемая нами система состоит из двигателя постоянного тока, подключенного к аналоговому порту. вашего Arduino.Arduino будет отвечать за чтение данных с этого устройства. в реальном времени. Мозг системы будет работать на ПК (рисунок 2). На ПК Озэки 10 смогут управлять общением. Вы можете легко запустить Ozeki 10 с помощью веб-браузера.
Рисунок 2 — Системная конфигурация двигателя постоянного тока, подключенного к ПК с помощью Arduino
Предварительные требования
- 1 или 2 малых двигателя постоянного тока
- Ozeki 10 установлен на вашем компьютере
- Программируемая плата (Arduino Mega / Nano / Uno, драйвер двигателя постоянного тока Ozeki или Raspberry Pi)
- Если вы не используете драйвер двигателя постоянного тока Ozeki, то потребуется плата контроллера двигателя постоянного тока LM298.
- USB-кабель необходим между Arduino Mega / Nano / Uno, драйвером двигателя постоянного тока Ozeki и вашим компьютером
Шаг 1. Подключите двигатели постоянного тока к Arduino
Вы можете увидеть, как подключить двигатели постоянного тока на любую из следующих досок:
Ваш браузер не поддерживает видео тег.
После подключения подключите плату к компьютеру!
Шаг 2 — Загрузите код в микроконтроллер
(Вот код для загрузки)
Ваш браузер не поддерживает видео тег.
Шаг 3 — Запустите Ozeki 10, чтобы попробовать двигатели постоянного тока
Ваш браузер не поддерживает видео тег.
Шаг 4. Настройте двигатели постоянного тока в Ozeki 10
Чтобы иметь возможность настраивать двигатели постоянного тока (подключенные к Arduino) в Ozeki 10, который установлен на вашем компьютере вам нужно открыть графический интерфейс пользователя (GUI) Ozeki 10.Вы можете открыть графический интерфейс, введя URL-адрес компьютера в свой веб-браузер. Например, если у нашего ПК IP-адрес 192.168.1.5, мы бы введите http://192.168.1.5:9513 в наш веб-браузер.
Шаг 5. Изучите протокол двигателей постоянного тока
Контроллер двигателя постоянного тока может связываться с Ozeki через следующий протокол.
Ссылки:
https://www.dummies.com
https://www.tutorialspoint.com
Дополнительная информация
Контроллер двигателя
Конфигурации Raspberry Pi и Arduino
Если вы похожи на меня, то вам нравится создавать мобильных роботов.Как я уверен, вы знаете, мобильные роботы состоят из 5 частей: шасси, двигателей, контроллеров, датчиков и источника питания. Чтобы охватить три из этих групп, вам необходимо правильно подключить двигатели к контроллерам (двигателю и главному устройству), а затем добавить источник питания.
Подключить контроллер мотора просто, но может быть сложно подключить его к мобильным приложениям. В этих примерах показаны схемы подключения пары двигателей постоянного тока 3–6 В, питаемых от аккумуляторной батареи 7,4 В (2 аккумулятора 18650).Выберите контроллеры из списка и используйте схемы подключения для завершения проекта. Для удобства вы также можете добавить эту страницу в закладки и посетить ее в следующий раз, когда будете строить мобильного робота.
В этой статье я собрал самые популярные или распространенные конфигурации для подключения контроллеров двигателей L298N (Datasheet) и L293D (Datasheet) к Raspberry Pi и Arduino (Uno, Nano, NodeMCU). Я собрал это руководство, чтобы хранить все ресурсы и электрические схемы в одном месте.
Для облегчения навигации вы можете щелкнуть приведенные ниже ссылки, чтобы найти электрическую схему на этой странице.
Схемы контроллеров двигателя Raspberry Pi
Напоминаем, что Raspberry Pi использует номера контактов Broadcom и физических контактов для контактов GPIO. Контакты Broadcom являются эталоном GPIOXX, а физические контакты — номерами, соответствующими физическому расположению каждого контакта в заголовке. Мы будем ссылаться на контакты Broadcom GPIOXX на схемах подключения ниже. Итак, с учетом сказанного, вот коллекция схем подключения популярного контроллера двигателя Raspberry Pi.
Нажмите, чтобы увидеть распиновку Raspberry Pi Zero W
Схема подключения Raspberry PiL298N
Для этого приложения вы подключите сигнальные контакты L298N следующим образом:
L298N ENA к GPIO18
L298N IN1 к GPIO4
L298N IN2 к GPIO17
L298N IN3 к GPIO27
L298N IN4 к GPIO22
L298N ENB к GPIO12
Для питания вашего Raspberry Pi используется аккумуляторная батарея 5 В, 2 А.
Схема подключения Raspberry Pi
L293D
L293D подключается аналогично. Для подключения L293D вам понадобится макетная плата. Вот сигнальные контакты между контроллерами.
L293D Включить 1 — GPIO18
L293D IN1 — GPIO4
L293D IN2 — GPIO17
L293D IN3 — GPIO27
L293D IN4 — GPIO22
L293D Включить 2 — GPIO12
Вы можете питать Raspberry Pi от аккумуляторной батареи 5 В, 2 А.
Adafruit TB6612 с Raspberry Pi
Наконец, вы можете использовать TB6612 с Raspberry Pi, если хотите использовать внешний источник питания двигателя постоянного тока.Вот как это устроено:
TB6612 AIN1 к GPIO18
TB6612 PWMA к GPIO4
TB6612 AIN2 к GPIO17
TB6612 STBY к GPIO27
TB6612 PWMB к GPIO22
TB6612 BIN2 к GPIO23
Если вы не используете Raspberry Pi, вы можете ознакомиться со схемами контроллера двигателя Arduino для своего проекта. Я собрал чертежи для Arduino Uno, Nano и NodeMCU.
Схема подключения контроллера мотора ArduinoЕсли вы предпочитаете использовать Arduino, вы можете ознакомиться с этим набором общих схем подключения контроллера двигателя Arduino.Чтобы узнать, как построить мобильного робота с помощью Arduino, ознакомьтесь с этим популярным руководством. Вы также можете подписаться на наш электронный курс по робототехнике, чтобы узнать больше о мобильных роботах, программировании, электронике и соревноваться в автономных задачах. Запишитесь на курс здесь.
Схема подключения Arduino Uno L298NL298N — довольно распространенный контроллер, используемый с Arduino Uno. Подключите сигнальные контакты следующим образом:
L298N ENA к цифровому 5
L298N IN1 к цифровому 2
L298N IN2 к цифровому 3
L298N IN3 к цифровому 4
L298N IN4 к цифровому 7
L298N ENB к цифровому 6
Затем включите L298N с 7.Аккумулятор на 4 В. Убедитесь, что у Arduino, L298N и аккумуляторной батареи есть общая земля. Вывод 12 В на L298N подключается к шине Vcc на макетной плате. Наконец, подключите 5 В от Arduino к шине Vcc на макете и к контакту 5 В на L298N. После подключения блока питания вам не нужно включать Arduino через USB-кабель.
Схема подключения Arduino Uno L293DГотовы добавить автономности своему роботу? Из этого руководства вы узнаете, как программировать контроллер двигателя L298N с помощью Arduino.
Вот электрическая схема L293D для Arduino Uno. Сигнальные контакты подключаются следующим образом:
L293D Включить 1 в цифровой 5
L293D IN1 в цифровой 2
L293D IN2 в цифровой 3
L293D IN3 в цифровой 4
L293D IN4 в цифровой 7
L293D Разрешить 2 в цифровой 6
Затем подключите провода двигателя к L293D, а затем подключите питание между Arduino, контроллером двигателя и аккумулятором.
Схема подключения
Arduino Nano L298N
Создайте робота Arduino меньшего размера, используя контроллер двигателя Arduino Nano и L298N.Подключите сигнальные контакты следующим образом:
L298N ENA к цифровому 3
L298N IN1 к цифровому 2
L298N IN2 к цифровому 4
L298N IN3 к цифровому 6
L298N IN4 к цифровому 7
L298N ENB к цифровому 5
Затем прикрепите выводы двигателя к боковым контактам на L298N. Затем подключите провода питания и заземления к макетной плате. Обязательно подключите питание и заземление для nano, контроллера мотора и аккумуляторной батареи.
Схема подключения Arduino Nano L293D
Вот как подключить Arduino Nano к контроллеру мотора L293D.Подключите сигнальные контакты следующим образом. Затем соедините провода питания, заземления и двигателя вместе, как показано на схеме ниже.
L293D Включить от 1 до 3
L293D IN1 до 2
L293D IN2 до 4
L293D IN3 до 6
L293D IN4 до 7
L293D Включить от 2 до 5
Схема подключения NodeMCU L298N
Для NodeMCU требуется дополнительный регулятор напряжения (L7805 — 5 В, 1,5 А), электролитический конденсатор (1 мкФ / 50 В) и керамический конденсатор (100 нФ — 0603). Сигнальные контакты между NodeMCU и L298N имеют следующий вид:
L298N ENA — D2
L298N IN1 — D1
L298N IN2 — D3
L298N IN3 — D4
L298N IN4 — D6
L298N ENB — D5
Схема подключения NodeMCU L293D
Вы также можете использовать L293D с вашим NodeMCU.Вот как подключить сигнальные контакты:
L293D Включить 1 — D2
L293D IN1 — D1
L293D IN2 — D3
L293D IN3 — D4
L293D IN4 — D6
L293D Включить 2 — D5
Наконец, вам нужно проверить проводку и выключить контроллер во время загрузки кода. Хорошей практикой является добавление выключателя питания к аккумуляторной батарее, чтобы упростить электромонтаж. Самое замечательное в этих конфигурациях то, что как только вы попробуете несколько из них, вы сможете сделать мобильного робота практически из чего угодно! Некоторые проекты включают Tiny Robot Cars, Robotic Tanks, Robot Cars и другие.
Вы построили какую-либо из этих конфигураций?
Надеюсь, эта статья окажется для вас полезной для вашего следующего проекта мобильного робота! Отметьте нас в своих проектах робототехники в Facebook и Instagram!
Тогда дайте мне знать, что вы думаете об этом посте, в разделе комментариев ниже. И, если у вас есть предложение или исправление для любой из этих схем подключения, обязательно включите это в свой комментарий.
Понравились эти статьи? Поддержите нашу работу, записавшись на онлайн-курс или подписавшись на ежемесячное членство.Наш сайт на 100% основан на нашем растущем сообществе, поэтому спасибо за вашу постоянную поддержку!
Support Content Like This
Основы электроники Arduino: управление двигателем
Эта статья была переведена на английский язык и изначально была опубликована для deviceplus.jp.
На Device Plus было представлено большое количество приложений для Arduino и примеров компонентов, но знание основ особенно важно, когда вы что-то создаете.Поэтому в сегодняшней статье мы рассмотрим ключевые основы Arduino. Этому нас сегодня научит эксперт и автор книги «Введение в основы электронных ремесел Arduino!» Казухиро Фукуда.
В этой статье я хотел бы осветить способы управления двигателями с большими электрическими токами.
Двигатели используются для управления широким спектром машин, таких как беспилотные летательные аппараты и автомобили. Подключение двигателей к источнику питания позволяет электронным компонентам генерировать вращательное движение.Прикрепление шин или пропеллеров к двигателю также увеличивает скорость вращения и движения операций.
На Arduino можно управлять двигателем. Как и в случае со светодиодом, вы можете управлять вращением или остановкой двигателя, включая и выключая питание, подаваемое на двигатель. В сочетании с другими датчиками можно настроить автоматическое управление, например, остановку двигателя при приближении препятствия.
Двигатель вращается в противоположном направлении, когда направление подключенного источника питания меняется на противоположное.Также можно изменить скорость вращения, отрегулировав величину протекающего тока. В результате это позволяет вращаться с высокой скоростью, когда двигатель движется, или медленно останавливаться в желаемом положении, постепенно замедляясь при остановке. Даже если снаряд попадает в вентиляторы, двигатель может двигаться назад и двигаться в других направлениях. При этом сегодня мы рассмотрим способы управления двигателем на Arduino.
[Содержание]
・ Для работы двигателя требуется драйвер
・ Подключение двигателя к Arduino
・ Управление двигателем по программе
・ Изменение скорости вращения двигателя
Для работы двигателя требуется драйвер
На цифровом выходе Arduino вы можете переключаться между High и Low для управления световыми вспышками светодиода.Используя эту функцию, вы сможете подавать электроэнергию на двигатель. Однако, даже если вы действительно подключите двигатель напрямую к Arduino, он не будет работать.
Для приведения в движение двигателя необходим большой электрический ток. Например, для сегодняшнего RE-280RA вам потребуется более 1 А электрического тока для его движения. Однако цифровой выходной разъем Arduino может протекать только до 20 мА. Пропуск любого электрического тока через это может потенциально повредить Arduino.Для этого нам нужно подключить двигатель к выходному разъему Arduino и управлять им.
Здесь будет использоваться «Драйвер двигателя». Драйвер двигателя — это электрический компонент, используемый для управления двигателем. Подготовьте цепь, которая соединяет двигатель с источником питания для работы двигателя, и вставьте драйвер двигателя внутрь. Драйвер двигателя может подключать и отключать цепь управления двигателем с помощью внешнего сигнала, а также может управлять вращением и остановкой двигателя. Поскольку в управляющий сигнал почти не поступает ток, даже если Arduino подключен, можно будет управлять двигателем без каких-либо проблем.
В зависимости от привода двигателя направление вращения можно переключать с помощью управляющего сигнала. Оснащен двумя разъемами управления, когда для одной стороны установлено значение High, она будет вращаться нормально, а другая сторона, для которой установлено значение High, будет вращаться в обратном направлении. Это позволяет управлять движением вперед, назад и стоп.
Подключение двигателя к Arduino
Теперь попробуем управлять двигателем от Arduino. Для этой части будет использоваться следующая электроника, поэтому убедитесь, что она у вас подготовлена.
Двигатель постоянного тока
Это корпус мотора. Эти типы двигателей, в которых используются сухие батареи, называются «двигателями постоянного тока». В этой статье мы будем использовать «RE-280RA». Аккумулятор RE-280RA может поддерживать электрическое напряжение до 4,5 В.
Драйвер двигателя
Мы будем использовать это для управления двигателем. Следуя сигналам от Arduino, вы можете контролировать подачу электричества на двигатель и направление вращения. Мы будем использовать BA6956AN 」производства ROHM.Начиная с коннектора с вырезами (левая сторона на рисунке), они считаются коннектором 1 и коннектором 2.
Конденсатор 0,1 мкФ
Конденсатор — это электрический компонент, который может накапливать небольшое количество электроэнергии. Когда он работает от мотора, он начинает шуметь. Этот шум потенциально отрицательно влияет на другие работающие электрические части. Поэтому подключите конденсатор к обоим разъемам, чтобы уменьшить шум.
Резистор 10 кОм (1/4 Вт)
Чтобы предотвратить поломку электронных компонентов из-за внезапного протекания большого электрического тока, ток можно подавить с помощью резистора.На этот раз, чтобы указать напряжение, подаваемое на двигатель, разъем Arduino 3.3V подключен к драйверу двигателя. Обычно ток почти не протекает, но в некоторых случаях может протекать большой ток, поэтому подключите резистор 10 кОм, чтобы предотвратить протекание больших токов. На резисторе 10 кОм нанесена маркировка «Коричневый, черный, оранжевый, золотой» вместе с цветовым кодом.
Аккумулятор
Защелка аккумулятора
Аккумуляторы используются в качестве источника энергии для вращения двигателя.Здесь будет использоваться 006P, который может подавать напряжение до 9 В. Он также использует защелки для батарей для подключения батарей к макетной плате.
Электрические зажимы Перемычки
Для двигателя необходима разводка разъемов до макетной платы. Обычно проводник припаивается к разъему. Однако, если вы используете перемычку с электрическим зажимом, вы можете просто подключить его, вставив зажим в разъем двигателя, что устраняет необходимость в пайке.
После того, как вы подготовили каждый из компонентов, подключите его, как показано ниже.
Подключите двигатель к разъемам 2 и 4 привода двигателя, защемив разъем электрическим зажимом. Помните, что во время работы двигателя может возникать шум, который может повлиять на другие устройства. Следовательно, подключение конденсаторов к обоим разъемам двигателя снизит уровень шума.
Электродвигатель может питаться от отдельно подготовленной аккумуляторной батареи.Следовательно, питание может подаваться от батареи, подключив батарею к пятому и третьему разъемам привода двигателя.
Кроме того, используемый на этот раз двигатель имеет диапазон питания до 4,5 В. По этой причине напряжение батареи 9 В может быть слишком высоким, поэтому существует вероятность повреждения двигателя. Поэтому укажите максимальное напряжение выхода, идущего в двигатель, на разъеме 1 драйвера двигателя. На этот раз мы сможем поставить до 3 штук.3В к мотору. Подключите блок питания Arduino 3.3V к разъему 1 и укажите максимальное напряжение. Вращением двигателя можно управлять с помощью седьмого и девятого разъемов привода двигателя. Это означает, что подключение к разъемам 5 и 6 Arduino позволяет управлять двигателем через выход Arduino.
Управление двигателем по программе
После подключения давайте попробуем управлять двигателем с помощью программного кода. Вращением двигателя можно управлять с помощью выходов разъемов Arduino 5 и 6.Вращением, остановкой и направлением вращения можно управлять, изменяя значение High или Low на этих двух разъемах. В случае с BA6956AN им можно управлять следующим образом.
Для нормального вращения выход разъема 5 установлен на высокий, а выход разъема 6 — на низкий. Запись приведенного ниже программного кода в Arduino должна запустить нормальное вращение двигателей.
В десятой строке выход должен быть установлен на высокий, а на разъеме 6 на шестой строке выход должен быть установлен на низкий.
Если вы хотите, чтобы двигатель вращался в противоположном направлении, выход разъема 5 должен быть установлен на низкий уровень, а выход разъема 6 должен быть установлен на высокий уровень.
Программный код должен выглядеть следующим образом:
На десятой строке выход разъема 5 должен быть установлен на низкий уровень, а на одиннадцатой строке разъем 6 должен быть установлен на высокий уровень. Когда вы хотите остановить двигатель, оба выхода для разъемов 5 и 6 должны быть установлены на низкий уровень.
Программный код должен выглядеть следующим образом:
Кроме того, установка обоих выходов на High приведет к включению автоматического выключателя.Установка любого из них на Низкое приведет к остановке через короткое время.
Изменение скорости вращения двигателя
В прошлый раз мы смогли изменить яркость с помощью метода вывода светодиодов под названием PWM. Даже на двигателе скорость вращения можно изменить, управляя двигателем с помощью ШИМ. Переключаясь между высоким и низким за короткий промежуток времени, двигатель поочередно переключается между вращением и остановом, при этом скорость вращения фактически ниже, чем обычно.Чем дольше время High, тем выше будет скорость вращения, и наоборот.
Для двигателя выведите управляющий разъем в том направлении, в котором вы хотите вращать ШИМ, и всегда держите другой разъем на низком уровне. Для нормального вращения выведите на коннектор 5 ШИМ и держите коннектор 6 на низком уровне. Для обратного вращения выведите разъем 6 на ШИМ и держите разъем 5 на низком уровне. Программный код для управления скоростью нормального вращения приведен ниже.
Для программного кода установите выходной коннектор 5 в строке 10 на половину коэффициента ШИМ (самый большой — 255) и оставьте коннектор 6 в строке 11 на низком уровне.Если вы измените число в строке 10, скорость также изменится. Однако двигатель не будет вращаться, если High меньше определенного процента. Если двигатель не вращается с малым значением, попробуйте указать большее значение. Вы можете постепенно изменять скорость, постепенно увеличивая или уменьшая значение, выводимое из разъема 5. В следующей программе скорость вращения будет постепенно увеличиваться из состояния остановки, и как только она достигнет максимума, скорость будет постепенно уменьшаться и останавливаться.
На сегодняшний день мы рассмотрели различные способы управления электронными компонентами на Arduino, такими как светодиоды или двигатели.В следующий раз мы поговорим о том, как узнать состояние переключателей на Arduino.
Драйвер двигателяL293D — Arduino — Робо Индия || Учебники || Изучите Arduino |
В этом руководстве Robo India объясняется, как управлять двигателем постоянного тока с помощью драйвера двигателя L293D IC с Arduino. (Робо Индия)
1. Введение
Драйвер двигателя — это модуль для двигателей, который позволяет вам управлять рабочей скоростью и направлением двух двигателей одновременно.Этот драйвер двигателя разработан и разработан на основе L293D IC.
L293D — это 16-контактная микросхема драйвера двигателя. Он предназначен для обеспечения двунаправленных управляющих токов при напряжении от 5 В до 36 В.
1,2 Требуемое оборудование
1,3 L293D Вывод IC
L293D — это 16-контактная ИС с восемью контактами на каждой стороне для одновременного управления двумя двигателями постоянного тока. Для каждого двигателя имеется 4 контакта INPUT, 4 контакта OUTPUT и 2 контакта ENABLE.
Контакт 1: когда Enable1 / 2 находится в HIGH, левая часть IC будет работать, то есть двигатель, подключенный к контактам 3 и 6, будет вращаться.
Контакт 2: Вход 1, когда этот контакт ВЫСОКИЙ, ток будет течь через выход 1.
Контакт 3: Выход 1, этот контакт подключен к одной клемме двигателя.
Контакт 4/5: контакты GND
Контакт 6: Выход 2, этот контакт подключен к одной клемме двигателя.
Контакт 7: Вход 2, когда этот контакт ВЫСОКИЙ, ток будет проходить через выход 2.
Контакт 8: VSS, этот контакт используется для подачи питания на подключенные двигатели с максимальным напряжением от 5 В до 36 В в зависимости от подключенного двигателя.
Контакт 9: когда Enable 3/4 находится в HIGH, правая часть IC будет работать, то есть двигатель, подключенный к контакту 11 и контакту 14, будет вращаться.
Контакт 10: вход 4, когда этот контакт ВЫСОКИЙ, ток будет проходить через выход 4.
Контакт 11: Выход 4, этот контакт подключен к одной клемме двигателя.
Контакт 12/13: Контакты GND
Контакт 14: Выход 3, этот контакт подключен к одной клемме двигателя.
Контакт 15: Вход 3, когда этот контакт ВЫСОКИЙ, ток будет течь через выход 3.
Контакт 16: VCC, для питания IC, например, 5 В.
2. Соединения с Arduino
1. Модуль 5V (VCC) — Arduino 5V.
2. Модуль GND — Arduino GND.
3. Модуль 1 — Arduino D8.
4. Модуль 2 — Arduino D9.
5. Модуль 3 — Arduino D10.
6. Модуль 4 — Arduino D11.
7.Модуль Моторные клеммы — двигатели постоянного тока.
8. Модуль VSS power terminal — Внешний источник питания 9В.
Выполните подключение, как показано выше.
Убедитесь, что на контактах Enable 1-2 и Enable 3-4 модуля предварительно установлены перемычки, чтобы двигатель включился и работал на максимальной скорости.
2.1. Рабочий механизм
Вращение двигателя зависит от контактов включения. Когда Enable 1/2 имеет значение HIGH, двигатель, подключенный к левой части IC, будет вращаться следующим образом:
| Вход 1 | Вход 2 | Результат |
| 0 | 0 | Стоп |
| 0 | 1 | Против часовой стрелки |
| 1 | 0 | По часовой стрелке |
| 1 | 1 | Стоп |
3.Программирование:
Вот код для запуска этой схемы.
Вы можете скачать этот код (Arduino Sketch) отсюда.
// Учебное пособие по управлению двигателем от RoboIndia
// Требования к оборудованию: драйвер двигателя (от RoboIndia) и Arduino
// Мотор A
const int inputPin1 = 10; // Вывод 15 микросхемы L293D
const int inputPin2 = 11; // Вывод 10 микросхемы L293D
// Мотор B
const int inputPin3 = 9; // Вывод 7 микросхемы L293D
const int inputPin4 = 8; // Вывод 2 микросхемы L293D
установка void ()
{
pinMode (inputPin1, ВЫХОД);
pinMode (inputPin2, ВЫХОД);
pinMode (inputPin3, ВЫХОД);
pinMode (inputPin4, ВЫХОД);
}
пустой цикл ()
{
digitalWrite (inputPin1, HIGH);
digitalWrite (inputPin2, LOW);
digitalWrite (inputPin3, HIGH);
digitalWrite (inputPin4, LOW);
}
4.Выход
После подключения вы скопируете и вставите этот код в Arduino IDE, а затем загрузите код. Оба мотора начнут вращаться.
Если у вас есть какие-либо вопросы, напишите нам по адресу [email protected]
С уважением и уважением
Команда разработки контента
Robo India
https://roboindia.com
— документация DCC ++ EX
Давайте начнем с основ и добавим по своему усмотрению.Для этой установки вам потребуются элементы, перечисленные на странице «Начало работы», а также:
Рисунок 1 — базовая настройка (щелкните, чтобы увеличить изображение)
Чтобы просмотреть видео о том, как это сделать, щелкните ниже: Настройка вашей командной станции
1. ПЕРЕД НАЧАЛОМ: Обрежьте дорожку Vin на контроллере мотора ИЛИ: выгните штырь Vin
Мы рекомендуем использовать два отдельных блока питания (или один блок питания, который может выдавать два разных напряжения).Один для Arduino Mega, а другой для контроллера мотора для питания ваших треков. Вам нужно будет перевернуть плату контроллера мотора и выполнить ОДНО из следующих действий:
-
Вырежьте дорожку Vin в нижней части платы.
-
Отогните или отрежьте винтовой штифт
Примечание
По умолчанию контроллер мотора подключает источник питания через контакты к Arduino. Это может подавать слишком высокое напряжение на Arduino. Если вы не обрежете эту дорожку или не согнете Vin, вы можете повредить Arduino, если подадите более 12 В на моторный щит.Таким же образом, если вы не обойдете Vin и используете 2 блока питания в соответствии с рекомендациями, они будут подключены друг к другу. Это было бы нехорошо.
Обрезание следов
Обрежьте след, указанный на рисунке, лезвием бритвы или ножом x-acto. 2 или 3 твердых царапины на следе должны сделать это. Не режьте слишком глубоко. Здесь пригодятся и лупа, и омметр. Маленькая вертикальная линия между двумя контактными площадками — это царапина, от которой мы прорезали небольшой след припоя.
Рисунок 2 — Обрезка дорожки Vin (щелкните, чтобы увеличить)
Если у вас есть омметр, прикоснитесь щупами к каждой стороне контактных площадок и убедитесь, что показание сопротивления бесконечно. Другими словами, убедитесь, что дорожка обрезана и между двумя контактными площадками на дорожке больше нет непрерывности.
Сгибание или отрезание винтовой шпильки
В этом методе вы можете просто согнуть вывод Vin так, чтобы вместо подключения к заголовку в Aduino он находился снаружи заголовка.В качестве альтернативы вы можете просто отрезать штырь кусачками и убедиться, что штифта не осталось достаточно, чтобы по-прежнему соприкасаться с отверстием, в которое он обычно входит, когда садится на Arduino.
Рисунок 3 — Выгибание штифта (щелкните, чтобы увеличить)
2. Вам нужно подключить моторный щит поверх Arduino.
Предупреждение
Очень легко сместить штырьки и тогда либо возникнут проблемы с диагностикой проблем, либо вы повредите плату!
Вот несколько советов:
-
На обеих платах есть разъемы питания.Они должны указывать в одном направлении.
-
На противоположном конце платы есть выступающие «выступы». Они должны указывать в одном направлении.
-
Номера контактов на обеих платах должны совпадать (контакт 1 идет к контакту 1, земля идет к земле и т. Д.).
-
Расположив разъемы питания справа от вас, выровняйте контакты вперед, обращенными к себе (контакты 0-12, aref, gnd и т. Д.).
-
Посмотрите на штыри на моторной доске и убедитесь, что все они прямые и выровнены в аккуратный ряд.
Поместите обе платы на стол концом разъема питания в одном направлении.
Обратите внимание, что вы можете щелкнуть по большинству изображений, чтобы увеличить их.
Рисунок 3 — Правильно сориентируйте платы
-
Не забыли вырезать след на моторном щите? Если нет, см. Выше. В противном случае посмотрите вниз на оба ряда штифтов на плате двигателя и убедитесь, что все они прямые. Все они должны быть выстроены в ряд и не изгибаться ни в одной плоскости, как зубцы на гребне.Если они похожи на фото ниже, согните их пальцами и / или плоскогубцами.
Рисунок 4 — Гнутые пальцы
-
Сначала совместите контакты на стороне платы, ближайшей к USB, с разъемом на Mega. Вы хотите совместить контакты 0-7 на Mega с такими же контактами на плате двигателя. С другой стороны, IOREF, RESET, 3V3 и т. Д. И A0-A5 должны быть выровнены на обеих платах. Посмотрите на картинку ниже и обратите внимание на небольшой зазор между двумя наборами контактов, который соответствует двум гнездам штырей.
Рисунок 5 — Выровняйте сначала левую сторону
-
Просто выровняйте их и начните вдавливать, но не толкайте их полностью. Пальцами попытайтесь надавить на булавки, чтобы они все вошли в отверстия.
Рисунок 6 — Запуск всех контактов
-
Проделайте то же самое с другой стороны. Совместите все штифты и начните осторожно нажимать, чтобы вставить их в отверстия. Обратите внимание: на этой стороне отверстий больше, чем булавок.Это нормально.
Рисунок 7 — Пуск с другой стороны
-
Теперь, соблюдая осторожность, чтобы не согнуть штифты, осторожно нажмите, используя раскачивающее движение, если необходимо, чтобы моторная плата плотно прилегала к Mega. Слегка нажмите, пока не почувствуете, что больше нельзя вставлять штифты. Ничего не заставляйте.
Рисунок 8 — Осторожно прижмите доски
-
Доски должны быть установлены.Обратите внимание, что контакты длиннее заголовков. Это нормально, если вы видите несколько миллиметров штырей между нижней частью моторной платы и верхней частью разъемов. На Рисунке 9 показаны доски в том виде, в котором они выглядят правильно установленными.
Рисунок 9 — Платы в полностью установленном состоянии
Проверьте свою работу. Посмотрите под и сквозь места соединения плат, убедитесь, что штифты не прошли через отверстия и не погнулись так, чтобы они проходили по внешней стороне коллекторов.
Примечание
Вы можете заметить, что припаянные контакты на нижней стороне разъема питания попали в верхнюю часть разъема USB на Arduino.Вы можете либо слегка приподнять доску, она все равно будет правильно соединяться, либо возьмите диагональные ножи и аккуратно подрежьте концы штырей.
3. Подключите блок питания к моторному щиту (но пока не подключайте его!)
Предупреждение
Убедитесь, что вы вырезали дорожку на плате управления двигателем. Если нет, сначала см. Выше. Как только вы узнаете, что след обрезан, подключите питание к плате двигателя
.Убедитесь, что у вас есть блок питания с правильными номинальными значениями напряжения и тока.Для получения помощи по выбору источника питания см. Совместимые источники питания
.Если вы используете «скамейку» или источник питания в металлическом корпусе, просто подключите выход постоянного тока источника питания к входу постоянного тока экрана двигателя. Убедитесь, что положительная винтовая клемма (+) подключена к положительной клемме (Vin) экрана двигателя, а отрицательная клемма (- или gnd) подключена к отрицательной клемме (gnd) экрана двигателя.
Рисунок 10 — Питание на щитке двигателя
Если вы используете блок питания типа «кирпич» для ноутбука или адаптер, который подключается к стене (он же настенная бородавка), используйте цилиндрический соединитель для привинчивания клеммного адаптера, чтобы подключить источник питания к Vin и контактам заземления на щите двигателя. .Соблюдайте правильную полярность. Убедитесь, что положительная клемма на адаптере винтовых клемм подключается к положительной клемме (+) на экране двигателя, а отрицательная клемма (- или gnd) подключается к отрицательной клемме.
Рисунок 11 — Переходник с винтовым зажимом к экрану двигателя
Если у вас нет переходника с винтовыми клеммами, можно отрезать конец блока питания и зачистить провода. Наружная оплетка провода обычно является отрицательным соединением, а центральный провод — положительным соединением.Проверьте изображение проводки на самом блоке питания.
4. Подключите провода питания к дорожкам
На щите двигателя имеется два набора выходных разъемов: «A» и «B». A — это основной трек или трек операций (также называемый «Ops»), а B — трек программирования или обслуживания. Подключите к каждой дорожке витую пару соответствующего калибра. Полярность здесь не важна, но если вы будете использовать запасной путь вместо отдельного неиспользуемого участка пути, убедитесь, что положительный и отрицательный стороны обоих путей совпадают.Другими словами, если вы рассматриваете одну сторону своей основной дорожки как имеющую «левую» и «правую» стороны, и подключаете положительный выход A к левой стороне, подключите положительный выход со стороны B к левой стороне программирование трека. С точки зрения электричества, мы хотим, чтобы обе дорожки были «в фазе» друг с другом. Вот диаграмма сверху, снова повторенная для справки.
Рисунок 12 — Выход на основную и программную дорожки
5. Подключите блок питания к Arduino (но пока не подключайте его!)
Подключите 2.5-миллиметровый цилиндрический разъем от вашего отдельного источника питания 7-9 В постоянного тока к цилиндрическому разъему на Arduino. Если у вас есть источник питания с оголенными проводами, вы можете обойти цилиндрический разъем и подключить источник питания к контактам «Vin» и «Gnd» на Arduino.
Примечание
Есть разные способы питания Arduino. Возможно, вам удастся избежать использования второго источника питания, если у вас всегда будет компьютер, подключенный к вашей CS (например, для запуска exWebThrottle или JMRI. Также существует способ использовать источник питания 5V).Прочтите «Источники питания», чтобы найти то, что лучше всего подойдет именно вам).
6. Установите дополнительную плату WiFi
Вы можете подключить контроллер, такой как JMRI или наш exWebThrottle, с помощью последовательного кабеля для соединения между вашим компьютером и CS. Если да, переходите к шагу 7. Если вы устанавливаете ESP8266 Shield или пустой ESP8266 для беспроводного подключения, щелкните ссылку ниже.
Настройка Wi-Fi
7. Загрузите микропрограмму на Command Station
Держите USB-кабель под рукой, потому что он нам понадобится на этом этапе.
Перейдите на страницу загрузок Command Station. Большинство пользователей захотят использовать установщик.
Locos не может реагировать на команды газа на дорожке программирования!
Мы повторили это в нескольких местах на веб-сайте, потому что это очень распространенная проблема. ГЛАВНЫЙ путь предназначен для движения поездов, ПРОГ (служебный путь) предназначен для программирования вашего локомотива. LOCO НЕ МОЖЕТ ОТВЕТИТЬ НА ДРОССЕЛЬНУЮ ЗАСЛОНКУ ИЛИ ФУНКЦИОНАЛЬНЫЕ КОМАНДЫ ВО ВРЕМЯ ПРОГРЕССИИ. Это является конструкцией и является частью спецификации NMRA.Есть такая вещь, как «Programming on Main», где вы можете настраивать такие вещи, как звуки, кривые дроссельной заслонки, согласование скорости и т. Д., Но вы не можете получить подтверждение от локомотива на главной дорожке. Обычно это нормально, потому что вы будете знать, «сработали» ли такие настройки, как изменение звука. На main у нас будет раздел по программированию. * TODO: Напишите справку POM * .
ТЕХНИЧЕСКИЕ ПРИМЕЧАНИЯ
Wire Gauge — Контроллер мотора Arduino может обеспечить только около 1.5 ампер мощности (несмотря на то, что он рассчитан на 2 А), так что провода 18 AWG вполне достаточно. Если вы используете другой контроллер мотора и подаете на трек больший ток, вам может понадобиться более толстый провод (меньший калибр).
Источники питания — Почему мы рекомендуем источник питания 7-9 В для Mega, если в руководстве говорится, что он может выдерживать 12 В или даже 20 В? Разве нельзя использовать один блок питания 12 В для их обоих? Короткий ответ; НЕТ. Вам нужны два источника питания (или один источник, который разделяет 2 напряжения). Для работы Arduino Mega требуется всего около 7 В.Любое превышение напряжения тратится на тепло и может сжечь регулятор на плате. И большинство людей хотят, чтобы на плате двигателя было минимум 12 В, в то время как многие хотят 14 В (для шкалы N и HO). Если ваш Mega может некоторое время нагреваться от 12 В, если 14 В от моторной платы будет подключено к Mega, это приведет к его разрушению. Отрежьте след и используйте 2 источника питания.
Использование источника питания 5 В — Есть еще один вариант питания Mega. Если у вас есть регулируемый источник питания 5 В постоянного тока, вы можете обойти цилиндрический разъем и регулятор и подключить его напрямую к контактам 5 В и Gnd на Arduino.НЕ ПОДКЛЮЧАЙТЕ ничего к разъему ствола, если вы это сделаете! Вам все равно нужно вырезать дорожку Vin на щите двигателя и использовать отдельный источник питания, который подключается к щиту. Для получения дополнительной информации см. Блоки питания
. Управление двигателем постоянного токас помощью Arduino
Двигатель постоянного тока — это тип электродвигателя, который преобразует электрическую мощность постоянного тока в механическую, то есть источник постоянного тока преобразуется во вращение или движение. Двигатели постоянного тока — одни из наиболее часто используемых двигателей в различных приложениях, таких как электронные игрушки, электроинструменты, переносные вентиляторы и т. Д.
Двигатели постоянного тока
подразделяются на различные типы, такие как последовательные, параллельные и составные, и каждый тип используется в различных областях применения. Некоторые двигатели постоянного тока также используются в робототехнике и промышленности из-за легкости управления и точности.
Поскольку двигатели постоянного тока обычно используются в малых и средних приложениях, где система в основном состоит из микроконтроллера в качестве главного процессора, управление двигателем постоянного тока и управление им очень важны.Это связано с тем, что управлять двигателем напрямую с помощью микроконтроллера не рекомендуется (иногда невозможно), поскольку ток от микроконтроллера очень мал (обычно менее 30 мА).
Выберите следующий набор проектов Arduino, которые вы хотите изучить в Electronicshub : Arduino Projects »В этом проекте небольшой двигатель постоянного тока управляется с помощью Arduino и микросхемы драйвера двигателя, где контролируются как скорость двигателя, так и направление вращения.
Принципиальная схема
Необходимые компоненты
- Arduino UNO [Купить] ИС драйвера двигателя
- L293D [Купить]
- Потенциометр 10 кОм
- Кнопка X 2
- Двигатель постоянного тока 12 В
- Адаптер 12 В постоянного тока
- Соединительные провода
Описание компонента
Ардуино UNO
Arduino UNO — это простой прототип электроники на базе микроконтроллера ATmega328P.Это 8-битный микроконтроллер на базе AVR, который действует как мозг Arduino UNO. Платы Arduino UNO часто используются во многих приложениях начального уровня, таких как управление светодиодами, приводы двигателей в высокопроизводительные приложения, такие как мониторинг погоды, портативные игровые консоли и т. Д.
L293D Драйвер двигателя IC
Как следует из названия, L293D представляет собой четырехканальную H-образную микросхему драйвера двигателя с высоким током. Его можно использовать для одновременного управления двумя двигателями в обоих направлениях с выходным током 600 мА для каждого двигателя.L293D IC предназначена для управления реле, двигателями постоянного тока, шаговыми двигателями и другими индуктивными нагрузками с высокими требованиями к току и напряжению.
Схемотехника
- Как упоминалось ранее, Arduino UNO и микросхема драйвера двигателя L293D являются основными компонентами схемы. Arduino UNO выступает в качестве основной обрабатывающей части схемы. Кнопка и потенциометр используются для управления направлением вращения и скоростью двигателя соответственно.
- Следовательно, кнопка подключена к контакту 13 Arduino для управления двигателем в прямом направлении, а другая кнопка подключена к контакту 12 Arduino для управления двигателем в обратном направлении, при этом другие клеммы обеих кнопок подключены к земле.
- Потенциометр, т.е. клемма стеклоочистителя потенциометра, подключена к аналоговому входному контакту A0 Arduino UNO. Остальные клеммы потенциометра подключены к источнику питания 5 В и заземлению соответственно.
- L293D — это 16-выводная ИС, доступная в двухрядном корпусе. Поскольку он способен приводить в действие два двигателя, мы увидим соединения, необходимые для привода одного двигателя. В том, что
- Контакт 1 микросхемы L293D IC используется для включения каналов 1 и 2 драйвера, то есть входов двигателя 1.Это активный высокий вывод, поэтому он подключен к источнику питания 5 В.
- Контакты 2 и 7 L293D являются входами драйверов, связанных с двигателем 1. Они подключены к контактам 11 и 10 Arduino UNO соответственно.
- Контакты 3 и 6 L293D являются выходными контактами первого канала драйвера. Они должны быть подключены к двигателю, которым мы собираемся управлять.
- Контакты 4, 5, 12 и 13 микросхемы L293D являются контактами заземления.
- Остальные соединения по отношению к L293D IC — это контакты источника питания.Микросхема драйвера двигателя L293D требует питания двух типов: один для внутренних операций, а другой — для каналов драйвера, управляющих двигателем.
- Контакт 16 микросхемы L293D является контактом питания для внутренних операций и подключен к источнику питания 5 В. Контакт 8 микросхемы L293D является источником питания двигателя и подключен к источнику питания 12 В.
Рабочий процесс
Целью этого проекта является разработка системы на базе Arduino для управления двигателем постоянного тока. Все подключения выполняются согласно указанной выше принципиальной схеме.Работа с проектом очень проста и объясняется здесь.
В этом проекте используются две кнопки, по одной для прямого и обратного направления двигателя. Две кнопки подключены к контактам 13 и 12 Arduino, которые вытянуты изнутри (с помощью кода). Остальные клеммы кнопок подключены к земле, и, следовательно, при нажатии кнопки микроконтроллер обнаруживает НИЗКИЙ уровень (логический 0).
Выход POT представляет собой аналоговый сигнал и, следовательно, он подключен к аналоговому выводу Arduino.На основе аналогового значения напряжения от POT изменяется скорость двигателя.
Чтобы это произошло, нам нужно использовать в схеме концепцию ШИМ. Входы для ИС драйвера двигателя должны быть в форме сигнала ШИМ и, следовательно, подключены к контактам 11 и 10 Arduino соответственно, которые способны генерировать сигналы ШИМ.
Когда система включена, Arduino ждет нажатия кнопки. Если нажата кнопка прямого направления, Arduino управляет входом 1 драйвера двигателя IC (контакт 2) с помощью сигнала ШИМ и низкого логического уровня на вход 2 (контакт 3).Следовательно, двигатель начинает вращаться в прямом направлении.
Точно так же, если нажата кнопка обратного направления, Arduino управляет входом 2 (контакт 3) микросхемы драйвера двигателя L293D с помощью ШИМ-сигнала, а входу 1 (контакт 2) L293D задается низкий логический уровень. Следовательно, двигатель начинает вращаться в обратном направлении.
Скорость двигателя в любом направлении можно контролировать с помощью POT, поскольку он управляет рабочим циклом выходного сигнала ШИМ.
