Как создать робота с системой компьютерного зрения для отслеживания объектов на Arduino. Какие компоненты потребуются для сборки. Как запрограммировать Arduino для обнаружения и слежения за объектами. Какие алгоритмы компьютерного зрения используются для отслеживания.
Основные компоненты системы отслеживания объектов на Arduino
Для создания робота с системой компьютерного зрения для отслеживания объектов на базе Arduino потребуются следующие основные компоненты:
- Микроконтроллер Arduino (например, Arduino Uno или Mega)
- Камера (например, OV7670 или Pixy2)
- Сервоприводы для поворота камеры по осям X и Y
- Драйвер двигателей (например, L298N) для управления моторами шасси
- Шасси робота с моторами
- Аккумулятор для автономной работы
Камера будет использоваться для получения изображений, Arduino обработает данные и выделит целевой объект, а сервоприводы обеспечат поворот камеры для удержания объекта в поле зрения.
Алгоритм работы системы отслеживания объектов
Основные этапы работы системы отслеживания объектов на Arduino:
- Получение изображения с камеры
- Предобработка изображения (фильтрация шумов, преобразование цветового пространства)
- Выделение целевого объекта (по цвету, форме или с помощью машинного обучения)
- Определение координат объекта на изображении
- Расчет управляющих сигналов для сервоприводов камеры
- Поворот камеры для удержания объекта в центре кадра
- Управление движением робота для следования за объектом
Этот цикл повторяется непрерывно, позволяя роботу отслеживать перемещение объекта в реальном времени.
Программирование Arduino для отслеживания объектов
Для реализации алгоритма отслеживания объектов на Arduino потребуется написать программу, выполняющую следующие основные функции:
- Инициализация камеры и получение изображений
- Обработка изображений и выделение целевого объекта
- Расчет управляющих сигналов для сервоприводов
- Управление сервоприводами камеры
- Управление моторами шасси робота
Для упрощения обработки изображений рекомендуется использовать специализированные библиотеки компьютерного зрения, например OpenCV или Pixy2. Они предоставляют готовые функции для фильтрации, сегментации и отслеживания объектов.
Методы выделения целевого объекта на изображении
Существует несколько основных подходов к выделению целевого объекта на изображении для отслеживания:
- По цвету — выделение пикселей заданного цветового диапазона
- По форме — поиск контуров объектов определенной формы
- С помощью каскадных классификаторов — обучение на наборе изображений объекта
- Нейронные сети — глубокое обучение для распознавания объектов
Выбор метода зависит от особенностей целевого объекта и условий съемки. Для простых объектов подойдет выделение по цвету, для более сложных — машинное обучение.
Управление сервоприводами для поворота камеры
Для удержания объекта в поле зрения камеры используются два сервопривода, поворачивающие камеру по горизонтали и вертикали. Алгоритм управления сервоприводами:
- Определение координат объекта на изображении
- Расчет отклонения от центра кадра
- Формирование ШИМ-сигнала для поворота сервоприводов
- Плавное изменение угла поворота для удержания объекта в центре
Важно ограничить максимальную скорость поворота камеры для стабильного отслеживания. Также нужно учитывать инерционность механической системы.

Управление движением робота для следования за объектом
Для того чтобы робот мог следовать за отслеживаемым объектом, необходимо реализовать алгоритм управления моторами шасси:
- Если объект находится в центре кадра — движение прямо
- Если объект смещен влево — поворот налево
- Если объект смещен вправо — поворот направо
- Если объект близко — замедление или остановка
- Если объект далеко — ускорение
Скорость и направление движения робота рассчитываются на основе положения объекта в кадре и его размера. Это позволяет плавно следовать за перемещающимся объектом.
Оптимизация производительности системы отслеживания
Для повышения быстродействия и точности отслеживания объектов на Arduino можно использовать следующие методы оптимизации:
- Уменьшение разрешения обрабатываемого изображения
- Использование более производительного микроконтроллера (например, ESP32)
- Применение специализированных процессоров обработки изображений
- Оптимизация алгоритмов компьютерного зрения
- Распараллеливание вычислений
Это позволит увеличить частоту кадров и повысить точность отслеживания быстродвижущихся объектов.
Возможные применения системы отслеживания объектов
Разработанная система отслеживания объектов на базе Arduino может найти применение в различных областях:
- Охранные системы — обнаружение движения и слежение за нарушителями
- Робототехника — автоматическое следование за целью
- Системы автоматического наведения камер
- Автоматизированные системы сортировки и контроля качества
- Интерактивные инсталляции в искусстве
Благодаря низкой стоимости и гибкости платформы Arduino, такие системы могут применяться как в любительских, так и в профессиональных проектах.
Заключение
Создание системы отслеживания объектов на базе Arduino открывает широкие возможности для разработки автономных роботов с компьютерным зрением. Несмотря на ограниченные вычислительные ресурсы микроконтроллера, грамотная реализация алгоритмов позволяет добиться хороших результатов в реальном времени. Дальнейшее развитие таких систем связано с применением более мощных процессоров и нейронных сетей для распознавания объектов.

Ардуино слежение за объектом
В данном проекте я совместил детектор распознавания лиц (face detection) и следящую (tracking system) систему.
Вкратце суть проекта: вебкамера, установленная на поворотном механизме подключена к компьютеру под управлением операционной системы Windows и с установленным программным обеспечением OpenCV. Если программа обнаруживает в поле зрения вебкамеры лицо, то вычисляется центр лица. Координаты X и Y передаются в контроллер Arduino, который подключен к компьютеру по USB. В свою очередь, контроллер Arduino по принятым командам управляет двумя сервомоторами: по координате X и по координате Y, т.о. обеспечивается следящая система.
Библиотеку OpenCV (Open Source Computer Vision Library) можно скачать здесь. Библиотека мультиплатформенная, в настоящее время существует под следующие ОС: Windows, Linux, Android, Mac OS и даже iOS. Библиотека обеспечивает обработку изображений в режиме реального времени. Написана на С/С++.
Т.о. данный проект представляет собой смесь soft и hard решений. Обработка изображения ведется на компьютере, а управление серво осуществляется при помощи контроллера.
Итак, что я использовал для проекта:
Железо:
компьютер с ОС Windows 7 SP1
Arduino Uno или совместимый + БП
2 сервопривода
USB вебкамера
Шаг 1. Установка программного обеспечения
1) Если у вас ОС Windows, то скачайте файл OpenCV-2.3.1-win-superpack.exe (или более позднюю версию) и установите библиотеку.
2) Скачайте и установите Microsoft Visual C++ 2010 Express. Если у вас 64-битная версия Windows, то также необходимо будет скачать Windows SDK (но для 64 версии могут быть проблемы, я так и не смог заставить работать OpenCV под Windows 7 x64).
Процесс настройку OpenCV для Visual C++ читайте на официальном сайте.
Шаг 2. Крепление камеры и сервомоторов
Я не стал делать конструкцию «долговечной», потому как после достижения конечной цели я все разбираю для следующего проекта.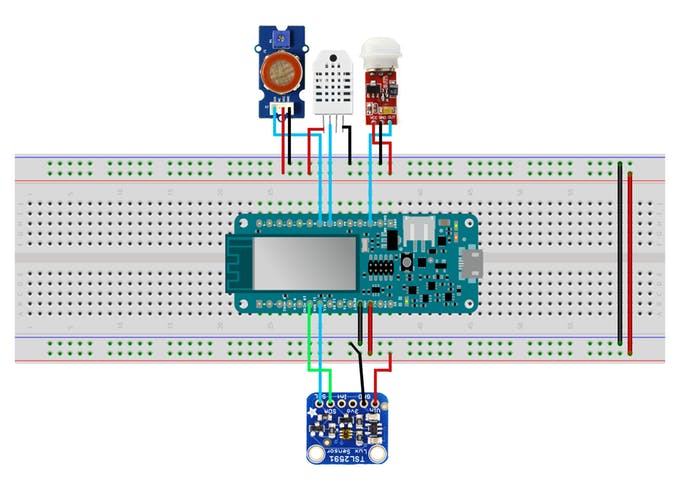
Вебкамеру я прикрепил к сервомотору оси Х, а его, в свою очередь закрепил на сервомоторе оси Y. И всю эту конструкцию закрепил в струбцине от «третьих рук».
Читайте также: Bitrix sale order payment receive
Шаг 3. Подключение
Подключение сервомоторов:
Желтый вывод от серво оси Х подключается к выводу 9 контроллера Arduino
Желтый вывод от серво оси Y подключается к выводу 10 контроллера Arduino
Черный вывод GND от серво подключается к выводу GND контроллера Arduino
Подключение вебкамеры:
Вебкамера подключается к компьютеру по USB интерфейсу. Программа C++ идентифицирует вебкамеру по номеру USB-порта. Возможно, потребуется указать порт в программе.
Подключение контроллера Arduino UNO:
Контроллер также подключается к компьютеру через USB-интерфейс. В системе появляется виртуальный COM-порт, который необходимо внести в код программы на C++.
Подвижный дальномер на сервомоторе часто используется в разных ардуино проектах. У меня возникла идея заставить ардуино следить за объектом двух плоскостях. Если объект будет смещаться — задача не терять его из поля зрения. Проект выполнен на ультразвуковом датчике HC-SR04 и паре сервомашинок.
Для изготовления потребуется:
- Любая ардуино плата
- Ультразвуковой датчик расстояния HC-SR04
- Одна-две сервомашинки SG-90
- Провода и руки
Схема подключения ультразвукового датчика слежения за объектом:
В первом скетче выполняется вращение от 30 до 150 градусов. Угол обзора можно задать для SG90 от 0 до 180 градусов. Это три положения: 30, 90 и 150 градусов. В коде программы задаем значение переменной distance которая определяет на каком расстоянии производить захват объекта в фокус. Как только будет зафиксировано приближение объекта ближе чем distance — сервомотор остановится и загорится светодиод.
Библиотека для ультразвукового датчика HC-RS04 Ultrasonic. h, для сервомотора — включена в состав программы Arduino IDE.
h, для сервомотора — включена в состав программы Arduino IDE.
Для эксперимента программа была модернизирована для добавления второго сервомотора. Он будет следить за объектом по вертикали. Что бы сервомашинки не молотили в режиме поиска постоянно можно было бы еще подключить датчик движения для активации поиска, а в остальное время переходить в режим ожидания.
Читайте также: Что делать если защитное стекло отклеивается
Вот скетч, где добавлен второй сервомотор для поиска границ объекта по вертикали:
Подвижный дальномер на сервомоторе часто используется в разных ардуино проектах. У меня возникла идея заставить ардуино следить за объектом двух плоскостях. Если объект будет смещаться — задача не терять его из поля зрения. Проект выполнен на ультразвуковом датчике HC-SR04 и паре сервомашинок.
Для изготовления потребуется:
- Любая ардуино плата
- Ультразвуковой датчик расстояния HC-SR04
- Одна-две сервомашинки SG-90
- Провода и руки
Схема подключения ультразвукового датчика слежения за объектом:
В первом скетче выполняется вращение от 30 до 150 градусов. Угол обзора можно задать для SG90 от 0 до 180 градусов. Это три положения: 30, 90 и 150 градусов. В коде программы задаем значение переменной distance которая определяет на каком расстоянии производить захват объекта в фокус. Как только будет зафиксировано приближение объекта ближе чем distance — сервомотор остановится и загорится светодиод.
Угол обзора можно задать для SG90 от 0 до 180 градусов. Это три положения: 30, 90 и 150 градусов. В коде программы задаем значение переменной distance которая определяет на каком расстоянии производить захват объекта в фокус. Как только будет зафиксировано приближение объекта ближе чем distance — сервомотор остановится и загорится светодиод.
Библиотека для ультразвукового датчика HC-RS04 Ultrasonic.h, для сервомотора — включена в состав программы Arduino IDE.
Для эксперимента программа была модернизирована для добавления второго сервомотора. Он будет следить за объектом по вертикали. Что бы сервомашинки не молотили в режиме поиска постоянно можно было бы еще подключить датчик движения для активации поиска, а в остальное время переходить в режим ожидания.
Вот скетч, где добавлен второй сервомотор для поиска границ объекта по вертикали:
Датчик слежения за линией Arduino
Описание Подключение датчика слежения за линией Применение
Датчик слежения за линией Arduino
Описание
Датчик слежения за линией (рисунок 1), входящий в состав ARDUINO SENSOR KIT, является оптическим модулем предназначенным для обнаружения препятствий в виде белых или чёрных линий. Основным элементом датчика является оптопара TCRT5000, состоящая из инфракрасного светодиода и фототранзистора. Для исключения взаимного влияния светодиода и фототранзистора они конструктивно разделены перегородкой. Также в состав модуля входят компаратор, подстроечный резистор и контрольный светодиод. Подстрочный резистор предназначен для регулировки порога срабатывания датчика на разный оттенок чёрного цвета (при минимальном сопротивлении датчик отреагирует только на чёрный цвет, при максимальном – на серый). При срабатывании датчика загорается контрольный светодиод и подается логический нуль на сигнальный вывод датчика. Технические характеристики датчика слежения за линией представлены в таблице.
Основным элементом датчика является оптопара TCRT5000, состоящая из инфракрасного светодиода и фототранзистора. Для исключения взаимного влияния светодиода и фототранзистора они конструктивно разделены перегородкой. Также в состав модуля входят компаратор, подстроечный резистор и контрольный светодиод. Подстрочный резистор предназначен для регулировки порога срабатывания датчика на разный оттенок чёрного цвета (при минимальном сопротивлении датчик отреагирует только на чёрный цвет, при максимальном – на серый). При срабатывании датчика загорается контрольный светодиод и подается логический нуль на сигнальный вывод датчика. Технические характеристики датчика слежения за линией представлены в таблице.
Рисунок 1 — Датчик слежения за линией Arduino.
Таблица – Технические характеристики датчика слежения за линией Arduino.
| Параметр | Значение |
|---|---|
| Номинальное рабочее напряжение | от 3.3 В до 5 В |
| Тип используемого компаратора | LM393 |
| Максимальная нагрузка на выход компаратора | 15 мА |
| Тип используемого ИК датчика | TCRT5000 |
| Длина волны излучения | 950 нм |
| Расстояние уверенного определения препятствия | от 1 мм до 25 мм |
| Габаритные размеры | 40 мм x 11 мм x 11 мм |
Принцип работы датчика состоит в том, что при подаче питания на модуль, инфракрасный светодиод начинает излучать свет, который отражаясь от белой поверхности попадает на фототранзистор, на вывод OUT при этом подается логическая единица.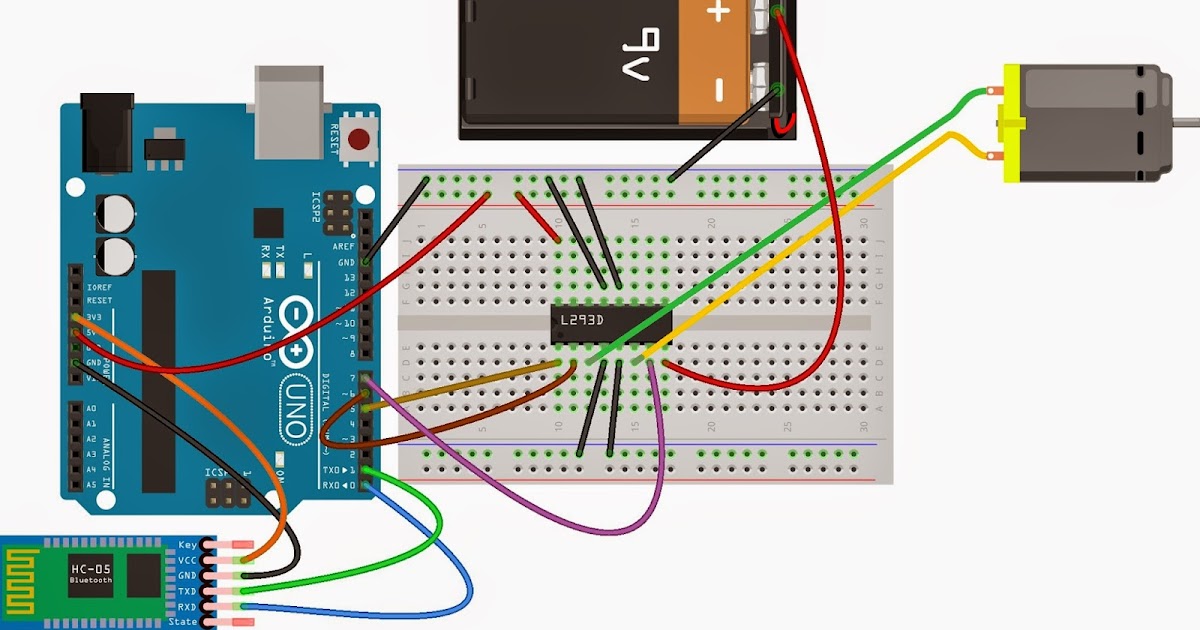 При попадании в зону видимости датчика черного объекта, световой поток, поглощается объектом, не попадает на фототранзистор и компаратор переключает вывод OUT на подачу логического нуля.
При попадании в зону видимости датчика черного объекта, световой поток, поглощается объектом, не попадает на фототранзистор и компаратор переключает вывод OUT на подачу логического нуля.
Подключение датчика слежения за линией
Распиновка датчика слежения за линией представлена на рисунке 2.
Рисунок 2 – Распиновка датчика слежения за линией Arduino.
Для его подключения потребуются:
- плата Arduino Uno / Arduino Nano / Arduino Mega;
- провода типа «папа-мама»;
- датчик слежения за линией;
- USB кабель для подключения платы Arduino к персональному компьютеру с установленной средой Arduino IDE.
Схема подключения датчика слежения за линией к плате Arduino представлена на рисунке 3.
Рисунок 3 – Подключение датчика слежения за линией к Arduino UNO.
Схемы подключения датчика слежения за линией к микроконтроллерам Arduino Uno, Arduino Nano или Arduino Mega принципиально ничем не отличаются.
Подключается датчик слежения за линией к Arduino Uno следующим образом:
- GND — GND;
- VCC — 5V;
- OUT, вывод – к пину 2 (любой цифровой пин платы Arduino).
После сборки электрической схемы, необходимо загрузить управляющую программу (скетч) в микроконтроллер. Затем можно открыть монитор порта и понаблюдать за получаемыми значениями при наличии чёрной линии в области видимости фотоэлемента, и при её отсутствии.
Применение
Датчики слежения за линией широко применяются в отраслях связанных с автоматизацией процессов таких как ЧПУ и робототехника. В ЧПУ датчики слежения за линией применяются в качестве оптических концевых выключателей, энкодеров, детекторов препятствий и т.п. В области робототехники основным применением датчиков является направление, когда мобильный робот должен следовать по определённой траектории, например, их имеют бытовые роботы пылесосы. Датчики данного типа нашли широкое применение в соревнованиях роботов типа Roborace. В таких проектах, могут использоваться, не один, а группа датчиков, с помощью которых робот определяет границы маршрута.
В таких проектах, могут использоваться, не один, а группа датчиков, с помощью которых робот определяет границы маршрута.
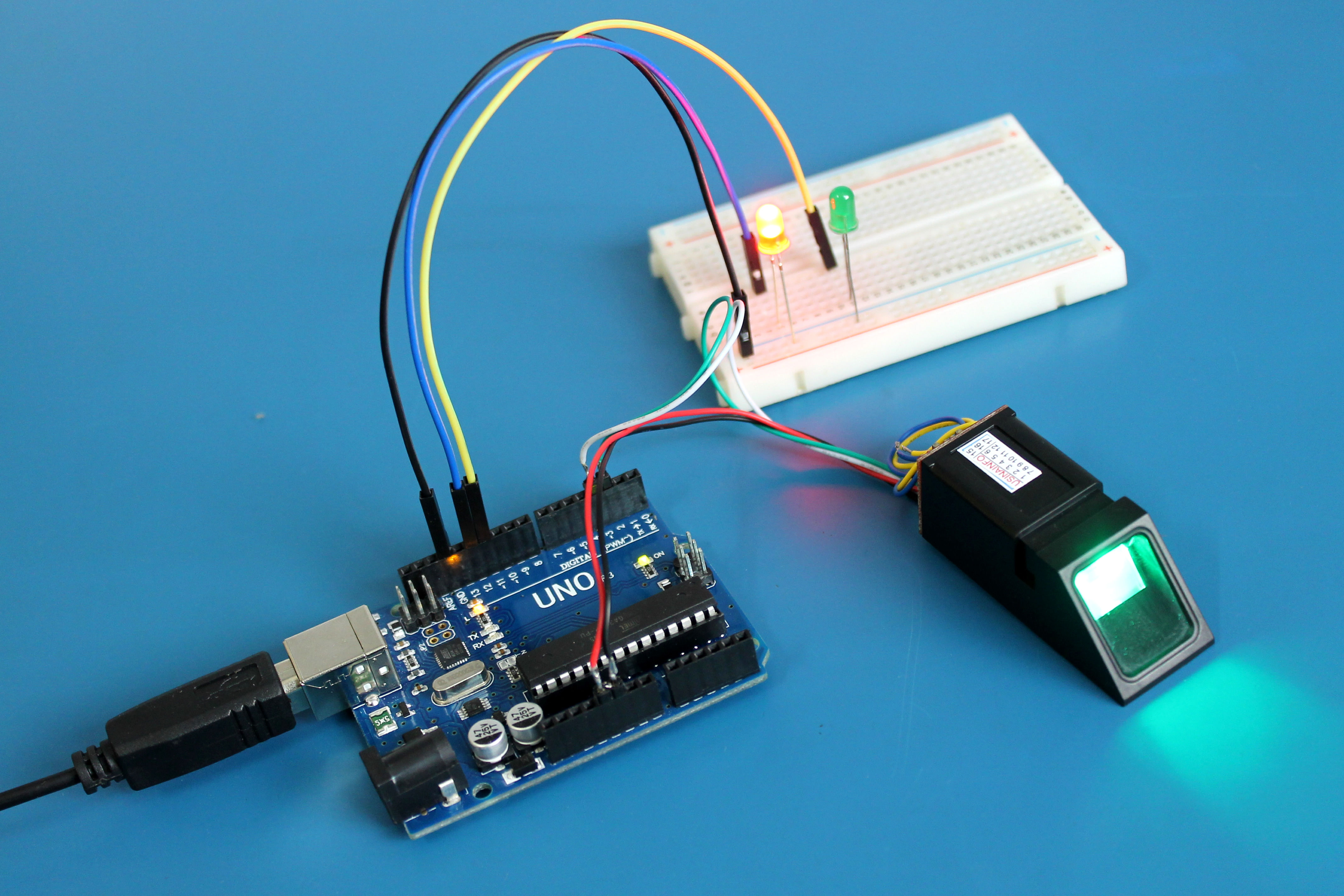
Удивительный робот для отслеживания объектов своими руками с использованием Huskylens
Проект Arduino AI — робот для отслеживания объектов Привет, в предыдущих постах и видеороликах этой серии руководств по датчику зрения Arduino AI я рассказал вам, что такое HuskyLens, что вы можете с ним делать и как вы можете подключить HuskyLens к Arduino.
Как насчет робота Arduino для отслеживания объектов? Ребята, в этом видео я покажу вам, как можно сделать робота для отслеживания объектов с помощью Arduino. Следите за обновлениями!
Шаг 1
Компоненты, необходимые для создания Robot, Robot
.
 Шасси
Шасси — провода-перемычки и
— соединительные кабели
ШАГ 2
Схема
Ребята, я разработал макет печатной платы, на котором вы можете легко установить Arduino Pro Mini и L29.3D, установите его, не используя беспорядочные провода и кабели, свисающие вокруг.
Плата легкая и может питаться от батареи 9 В или адаптера питания 9-12 В.
ШАГ 3
Шасси робота
Теперь нам нужно шасси робота. Это одно из лучших шасси, которое я использую для сборки Spinel Crux. Если хотите, оставлю ссылку в описании. Иди проверь! Spinal Crux — робот, управляемый жестами.
Для крепления камеры HuskyLens к корпусу можно использовать монтажные кронштейны и детали, входящие в комплект поставки.
Прикрепив HuskyLens к корпусу, вы можете закрепить собранную печатную плату и аккумулятор на верхней части корпуса.
ШАГ 4
Установка библиотеки Arduino для HuskyLens
Следующее, что мы хотим сделать, это установить библиотеку HuskyLens для Arduino.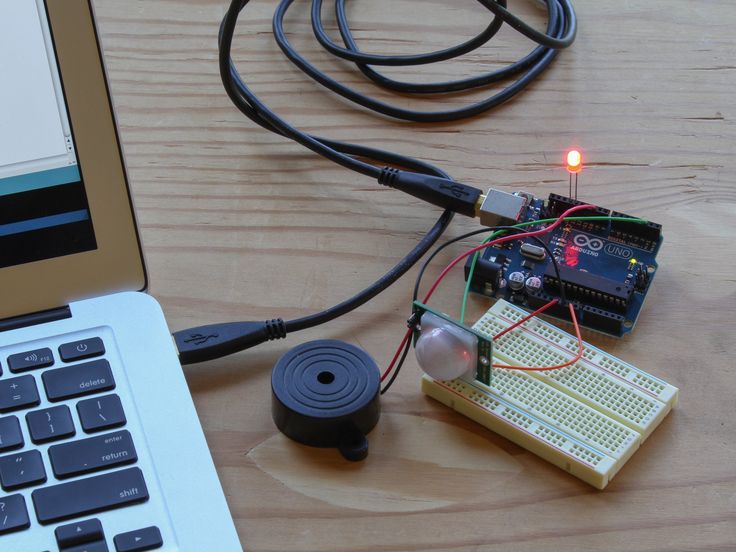
В приведенном ниже видео я объяснил все шаги по установке HuskyLens из загрузки Arduino IDE до первой загрузки кода. Проверь это!
ШАГ 5
Кодирование
Теперь пришло время кодировать. В предыдущем видео я показал вам, как загрузить базовый код в Arduino и прочитать из него данные HuskyLens. Посмотрите приведенное выше видео, если вы хотите узнать больше об интеграции Hukylens в Arduino.
Нажмите здесь, чтобы загрузить код для робота слежения за объектами .
Несмотря на то, что код длинный, его очень просто понять. Во-первых, мы настроили программную последовательную библиотеку, которая добавит дополнительный последовательный интерфейс к Arduino на контактах 10 и 11, где мы подключаем HuskyLens.
Затем мы инициируем оба последовательных интерфейса с заданной скоростью передачи данных. Затем мы устанавливаем штифт для управления двигателями, включая штифты включения.
Затем в программе вы увидите некоторые функции для управления двигателем, а также отображение выходных данных Huskylens, которые считываются Arduino.
ШАГ 6
Поехали!!!
Как насчет пробного запуска? Теперь включите бота и обучите объект, установив Huskylens в режим отслеживания объекта.
Как только это будет сделано, вы можете переместить объект влево или вправо, и бот начнет следовать за объектом.
Лицензия
Все права
Зарезервировано
Теги ArduinoHUSKYLENSRoboticsAICreate From Home
rootsaid May 07.2020
240 M-point
1 Makelogs
Отслеживание движения | Хакадей
18 ноября 2022 г., Робин Кири
Независимо от того, насколько развиты ваши дизайнерские навыки, скорее всего, вам придется потратить некоторое время на поиск ошибок в ваших досках после того, как они вернутся из сборочного цеха. Тестирование и отладка печатной платы обычно включает в себя много перекрестных проверок между платой, компоновкой и схемой, что быстро становится утомительным даже для умеренно сложных конструкций. Чтобы немного облегчить эту задачу, [Ишан Чаттерджи] и его коллеги из Вашингтонского университета разработали рабочее место для отладки дополненной реальности, или сокращенно ARDW.
Чтобы немного облегчить эту задачу, [Ишан Чаттерджи] и его коллеги из Вашингтонского университета разработали рабочее место для отладки дополненной реальности, или сокращенно ARDW.
ARDW представляет собой установку, состоящую из лабораторного рабочего стола с антистатическим ковриком, набора измерительных инструментов и ПК. Вы можете просто положить плату на стол, открыть схему и топологию в KiCAD и начать измерение и отладку проекта, как обычно, но настоящее волшебство происходит, когда вы выбираете новую иконку в KiCAD, которая экспортирует схему и топологию в система РДВ. С этого момента вы можете выбирать компоненты на своей схеме и выделять их не только на топологии, но и на физической доске перед вами. Возможно, лучше всего это продемонстрировать визуально, как это делают члены команды на видео, встроенном ниже.
Реальное выделение компонентов достигается благодаря набору камер, которые отслеживают движение всего на столе, а также видеопроектору, который накладывает информацию поверх печатной платы.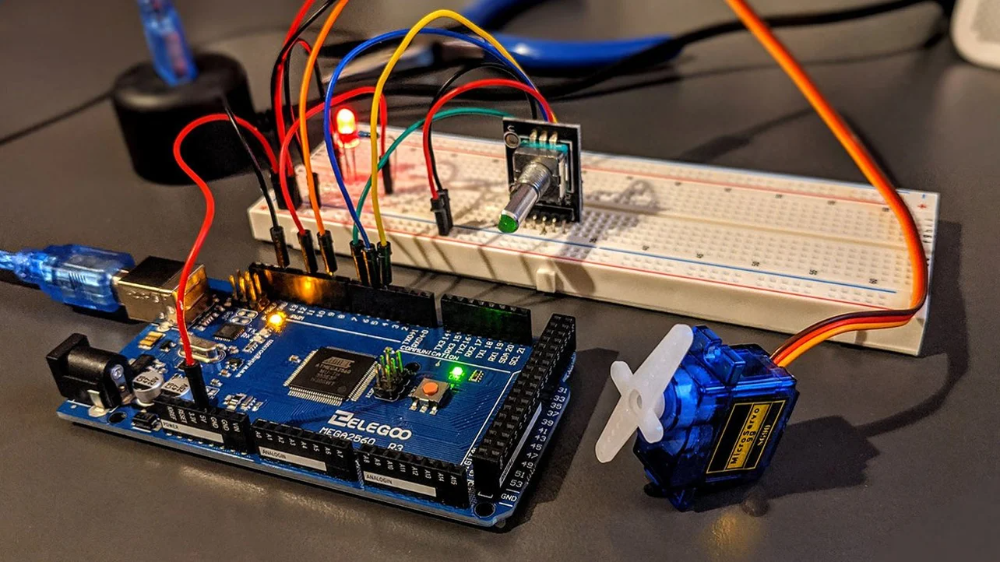 Все это обеспечивает множество полезных функций отладки: например, есть возможность выделить первый вывод на всех компонентах, что позволяет легко визуально проверить ориентацию каждого компонента. Вы можете выбрать все экземпляры Do Not Populate (DNP) и сразу увидеть, все ли выделенные контактные площадки пусты. Если вы не уверены, на какой компонент вы смотрите, просто наведите на него щуп мультиметра, и он будет выделен на схеме и компоновке. Вы даже можете размещать пробники в сети и автоматически регистрировать напряжение для использования в будущем благодаря цифровой связи между мультиметром и программным обеспечением ARDW.
Все это обеспечивает множество полезных функций отладки: например, есть возможность выделить первый вывод на всех компонентах, что позволяет легко визуально проверить ориентацию каждого компонента. Вы можете выбрать все экземпляры Do Not Populate (DNP) и сразу увидеть, все ли выделенные контактные площадки пусты. Если вы не уверены, на какой компонент вы смотрите, просто наведите на него щуп мультиметра, и он будет выделен на схеме и компоновке. Вы даже можете размещать пробники в сети и автоматически регистрировать напряжение для использования в будущем благодаря цифровой связи между мультиметром и программным обеспечением ARDW.
В дополнение к проектированию и созданию ARDW, команда также провела исследование удобства использования с использованием группы испытуемых-людей. Им особенно понравилась возможность быстро находить компоненты на переполненных платах, но система онлайн-измерений показалась им немного громоздкой из-за ее ограниченной точности позиционирования. Поэтому дальнейшая работа будет сосредоточена на улучшении разрешения проецируемого изображения и в целом на повышении компактности и надежности системы.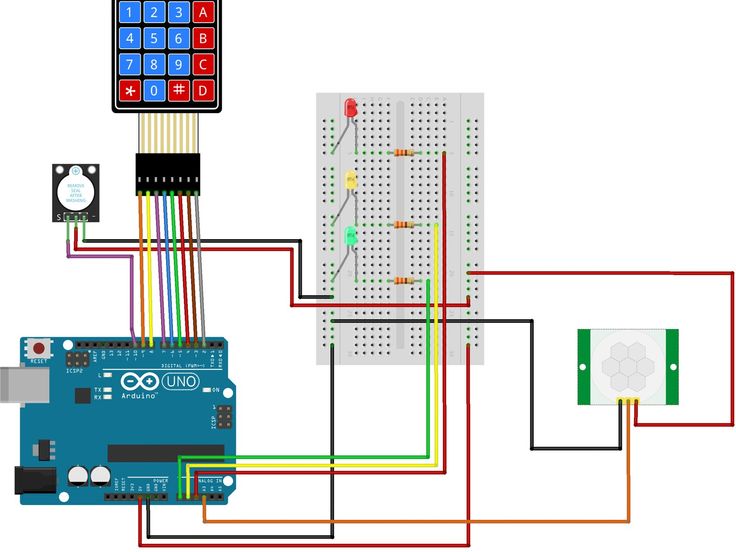 Все программное обеспечение находится в свободном доступе на странице проекта GitHub, и хотя текущая система выглядит немного сложной для использования любителями, мы уже можем представить ее как полезный инструмент в производственных средах.
Все программное обеспечение находится в свободном доступе на странице проекта GitHub, и хотя текущая система выглядит немного сложной для использования любителями, мы уже можем представить ее как полезный инструмент в производственных средах.
Это даже не первый случай использования дополненной реальности для отладки печатных плат: мы видели несколько похожую систему на Hackaday Superconference 2019. AR также может пригодиться на этапе проектирования и прототипирования, как показано на этом макете AR.
Читать далее «Дополненная реальность Workbench помогает отлаживать платы» →
Опубликовано в Ремонтные хаки, Технические хаки, Взломы инструментовпомеченный дополненная реальность, отладка, лабораторный стол, отслеживание движения23 октября 2021 г. Эл Уильямс
Хэллоуин не за горами, и почти каждый проект на Хэллоуин нуждается в датчике движения. Исторически мы использовали инфракрасные и ультразвуковые датчики, но [Makers Mashup] решил использовать ESP32-Cam в качестве датчика движения в своем последнем аниматронном творении.![]() Ниже вы можете посмотреть видео устройства и того, как оно работает.
Ниже вы можете посмотреть видео устройства и того, как оно работает.
Проект представляет собой череп, который следует за вами с помощью шагового двигателя на несколько градусов. Корпус, напечатанный на 3D-принтере, упрощает сборку оборудования. Базовое программное обеспечение было заимствовано у [Eloquent Arduino].
Продолжить чтение «ESP32-Cam делает детектор движения Денди» →
Posted in ARM, Holiday HacksTagged аниматроник, ESP32, ESP32-CAM, Хэллоуин, обнаружение движения, датчик движения, отслеживание движения4 июня 2019 г., Левин Дэй
Многие из нас сталкивались с произведением искусства в галерее, когда кажется, что глаза следуют за ним по комнате. В нашей высокотехнологичной работе этого уже не нужно добиваться художественным мастерством. Вместо этого вы можете просто построить что-то, что действительно движется.
Шартрез создан [алинтоном] и обладает собственной индивидуальностью. Лицо было создано из дерева, вырезанного лазером, и собрано слой за слоем. Затем ему дали светящиеся светодиодные глаза и установили на вращающуюся пластину. В сочетании с Arduino и ультразвуковым датчиком он способен отслеживать цели, движущиеся в пределах его поля зрения, и вращаться, чтобы следовать за ними. Выражение лица Шартреза тоже меняется, от счастливого до несчастного, в зависимости от ситуации.
Лицо было создано из дерева, вырезанного лазером, и собрано слой за слоем. Затем ему дали светящиеся светодиодные глаза и установили на вращающуюся пластину. В сочетании с Arduino и ультразвуковым датчиком он способен отслеживать цели, движущиеся в пределах его поля зрения, и вращаться, чтобы следовать за ними. Выражение лица Шартреза тоже меняется, от счастливого до несчастного, в зависимости от ситуации.
Это отличный пример художественных результатов, которые могут быть достигнуты путем наслоения материалов, вырезанных лазером, а также того, как искусство может быть воплощено в жизнь с помощью простых инструментов, таких как сервоприводы и микроконтроллеры. Отслеживание движения также имеет множество полезных применений, например, направленное тепло непосредственно на холодных людей. Видео после перерыва.
Продолжить чтение «Отслеживание движения лица действительно следует за вами по комнате» →
Posted in classic hacksTagged отслеживание движения, отслеживание 4 марта 2018 г. , Дональд Папп
, Дональд Папп
Это более старый проект, но электромеханическое решение, использованное для создания этого гигантского пристального взгляда, заслуживает внимания. [Ричарду] и [Антону] нужно было большое немигающее глазное яблоко, которое могло бы смотреть в любом направлении, и их решение даже обеспечивает регулируемый размер зрачка и радужной оболочки. Заставить зрачок расширяться или сужаться по требованию — тоже очень хорошая функция.
Огромная тканевая сфера освещается изнутри лампочкой в центре, а механизм радужной оболочки и зрачка вращается вокруг лампочки, как части планетарного корабля. Удерживая колбу в центре и вращая голубой гель (для радужной оболочки) и непрозрачный диск (для зрачка) вокруг колбы, можно создать впечатление, что глаз смотрит в разные стороны. Регулируя расстояние дисков от колбы, можно изменить размер радужной оболочки и зрачка.
Система камер улавливает объекты (например, людей) и направляет взгляд на них. Система умная, но реализация не идеальна. Как вы можете видеть на коротком видеоролике ниже, обнаружение человека, идущего мимо, сильно запаздывает. Кроме того, в движении радужной оболочки и зрачка присутствуют колебания. Тем не менее, как механизм он прекрасен.
Система умная, но реализация не идеальна. Как вы можете видеть на коротком видеоролике ниже, обнаружение человека, идущего мимо, сильно запаздывает. Кроме того, в движении радужной оболочки и зрачка присутствуют колебания. Тем не менее, как механизм он прекрасен.
Продолжить чтение «Созерцайте гигантский глаз, похожий на радужную оболочку и механизм зрачка» →
Posted in Robots HacksTagged искусство, глазное яблоко, гель, гигантский глаз, светящийся, освещенный, радужная оболочка, отслеживание движения, orrery, зрачок, пристальный взгляд17 сентября 2017 г., Джон Байхтал
[Koppany Horvarth] задался целью создать очень дешевую установку оптического слежения для виртуальной реальности, которая использует только две камеры и определенное количество математических вычислений, чтобы делать свое дело. Он знал, что теоретически может это сделать, и это не будет стоить больших денег, но все же потребует много работы и немного абсурдного количества математики.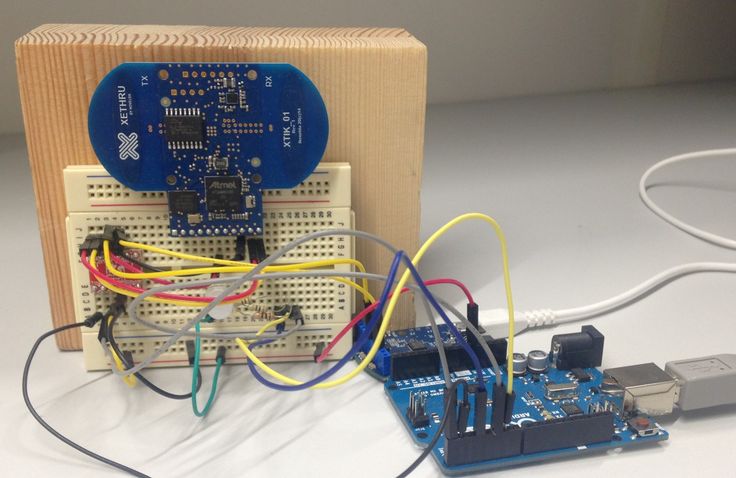
Играя с веб-камерой, которую он настроил для запуска скрипта Python для отслеживания объектов, он обнаружил, что его установка имеет тенденцию отображать полупрозрачный объект со светодиодом внутри как чистый размытый белый цвет. Это натолкнуло [Коппани] на мысль, что он может использовать такой свет как часть своего проекта по отслеживанию объектов. Он напечатал на 3D-принтере 50-миллиметровые полые сферы из прозрачного полилактида, которые освещались светодиодом и питались от источника питания 5 В, извлеченного из старого USB-кабеля. После того, как он разобрался с некоторыми бликами, он немного отшлифовал PLA, чтобы рассеять свет, и это сработало как по маслу.
Чтобы узнать больше, посетите его репозиторий кода на GitHub. Вы также можете черпать вдохновение в некоторых других сообщениях об отслеживании движения, которые мы публиковали в прошлом, например, об отслеживании движения по дешевке с PIC и этой турелью OpenCV Airsoft.
Posted in Виртуальная реальностьTagged отслеживание движения, python, детектор движения веб-камеры 11 февраля 2017 г. Адиль Малик
Адиль Малик
[Маттео] только что выпустил новую часть своего взлома контроллера Google Daydream VR, о котором мы впервые рассказали в прошлом году (когда он научился работать с iOS). На этот раз ему удалось создать наполовину Daydream, наполовину гибрид контроллера PlayStation Move.
Оригинальный контроллер управлял всего лишь 3 степенями свободы, используя внутренний акселерометр; хотя это передало вращательное движение вокруг оси 3, переходная информация полностью отсутствовала. [Маттео] решает эту проблему, формируя простой позиционный маркер из белого светодиода, заключенного в стандартный шарик для пинг-понга; Он отслеживает эту установку с помощью камеры iSight.
Чтобы собрать все воедино, он добавляет отслеживание движения к своему уже обширно разработанному стеку программного обеспечения, что позволяет ему отделить контроллер Daydream от Android. Он расшифровывает пакеты Bluetooth и передает сенсорную информацию прямо в веб-браузер через соединение через веб-сокет.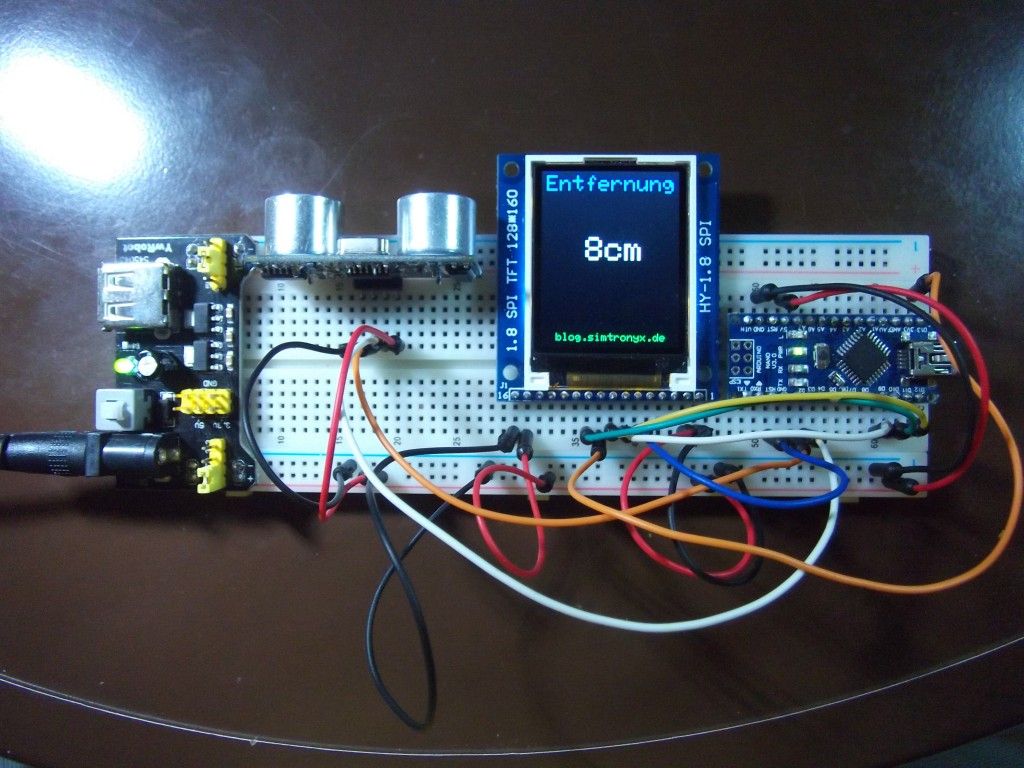
Результаты впечатляют, а отслеживание плавное. Это не только дополняет конечную цель — проложить себе путь к независимому от платформы контроллеру движений виртуальной реальности, но и вдохновляет Sony, расширяет аппаратное обеспечение Google и даже умудряется использовать веб-камеру Apple. Как насчет того, чтобы прорезать проходы между огороженными садами бытовой электроники?
Читать далее «Мячик для пинг-понга улучшает контроллер Google Daydream» →
Рубрика: Слайдер, Виртуальная реальностьПомеченный степенями свободы, google daydream, отслеживание движения, виртуальная реальность, vr28 января 2017 г., Джеймс Хобсон
Как сделать самую классную игровую периферию еще хуже? Дайте ему обновление 21-го века! [Алессио Козенца] называет этот мод Power Glove Ultra, и он работает именно так, как мы себе представляли все эти годы назад.
Наиболее заметным изменением является напечатанное на 3D-принтере крепление, в котором размещен модуль Bluetooth, комбинированное зарядное устройство USB и усилитель напряжения, а также плата Metro Mini (ATmega328).