Как устроен асинхронный двигатель. Какие бывают виды асинхронных двигателей. Как работает асинхронный двигатель. Каковы преимущества и недостатки асинхронных двигателей. Где применяются асинхронные двигатели.
Что такое асинхронный двигатель
Асинхронный двигатель — это электрическая машина переменного тока, предназначенная для преобразования электрической энергии в механическую. Это самый распространенный тип электродвигателей, на долю которых приходится около 90% всех используемых электродвигателей в мире.
Главная особенность асинхронного двигателя заключается в том, что частота вращения ротора не совпадает с частотой вращения магнитного поля статора. Отсюда и название «асинхронный», то есть несинхронный.
Устройство асинхронного двигателя
Основными частями асинхронного двигателя являются:
- Статор — неподвижная часть
- Ротор — вращающаяся часть
- Подшипниковые щиты
- Вал
- Вентилятор
- Клеммная коробка
Статор представляет собой полый цилиндр, собранный из тонких листов электротехнической стали. В пазах статора размещена трехфазная обмотка, подключаемая к сети переменного тока.

Ротор располагается внутри статора с небольшим воздушным зазором. Он также набран из листов электротехнической стали и имеет обмотку.
Виды асинхронных двигателей
По типу ротора асинхронные двигатели делятся на два основных вида:
1. Двигатели с короткозамкнутым ротором
Обмотка ротора выполнена в виде «беличьей клетки» — алюминиевых или медных стержней, замкнутых по торцам кольцами. Такая конструкция отличается простотой и надежностью.
2. Двигатели с фазным ротором
Ротор имеет трехфазную обмотку, выполненную по типу обмотки статора. Концы обмотки выведены на контактные кольца. Это позволяет включать в цепь ротора дополнительное сопротивление для регулирования частоты вращения и пускового момента.
Принцип работы асинхронного двигателя
Принцип действия асинхронного двигателя основан на взаимодействии вращающегося магнитного поля статора с токами, индуцированными этим полем в обмотке ротора.
Основные этапы работы:
- При подаче трехфазного напряжения на обмотку статора создается вращающееся магнитное поле.
- Это поле пересекает проводники обмотки ротора и индуцирует в них ЭДС.
- Под действием ЭДС в обмотке ротора возникают токи.
- Взаимодействие токов ротора с магнитным полем статора создает вращающий момент.
- Под действием момента ротор начинает вращаться вслед за полем статора.
Частота вращения ротора всегда меньше частоты вращения поля статора. Разность между этими частотами называется скольжением.

Преимущества и недостатки асинхронных двигателей
Асинхронные двигатели получили широкое распространение благодаря ряду достоинств:
- Простота конструкции
- Высокая надежность
- Простота обслуживания
- Возможность работы напрямую от сети переменного тока
К недостаткам можно отнести:
- Сложность регулирования частоты вращения
- Небольшой пусковой момент (для короткозамкнутых двигателей)
- Низкий коэффициент мощности при малых нагрузках
Применение асинхронных двигателей
Асинхронные электродвигатели нашли применение во многих отраслях:
- Промышленное оборудование (станки, конвейеры, насосы, вентиляторы)
- Бытовая техника (стиральные машины, холодильники, кондиционеры)
- Транспорт (электровозы, электропогрузчики)
- Сельское хозяйство (электроприводы в сельхозтехнике)
- Строительство (подъемные краны, бетономешалки)
Широкое распространение асинхронных двигателей обусловлено их простотой, надежностью и невысокой стоимостью. При этом они обеспечивают достаточно высокий КПД и хорошие эксплуатационные характеристики.
Регулирование частоты вращения асинхронного двигателя
Регулирование скорости асинхронного двигателя может осуществляться несколькими способами:
- Изменением частоты питающего напряжения с помощью преобразователя частоты
- Изменением числа пар полюсов обмотки статора
- Введением добавочного сопротивления в цепь ротора (для двигателей с фазным ротором)
- Изменением напряжения, подводимого к статору
Наиболее эффективным и распространенным в настоящее время является частотное регулирование с помощью преобразователей частоты. Этот способ позволяет плавно изменять скорость в широком диапазоне.
Пуск асинхронного двигателя
Пуск асинхронного двигателя сопровождается большими пусковыми токами, которые могут в 5-7 раз превышать номинальный ток. Для ограничения пусковых токов применяются следующие способы пуска:
- Прямой пуск (для двигателей малой мощности)
- Пуск переключением обмоток статора со звезды на треугольник
- Пуск через автотрансформатор
- Пуск с помощью устройства плавного пуска
- Частотный пуск
Выбор способа пуска зависит от мощности двигателя, характера нагрузки и требований к пусковому моменту.

Тормозные режимы асинхронного двигателя
Асинхронный двигатель может работать в следующих тормозных режимах:
- Генераторное торможение — ротор вращается быстрее магнитного поля статора
- Торможение противовключением — изменяется порядок чередования фаз статора
- Динамическое торможение — обмотка статора отключается от сети и подключается к источнику постоянного тока
Применение того или иного способа торможения зависит от конкретных условий эксплуатации двигателя.
Асинхронный двигатель — принцип работы и устройство
8 марта 1889 года величайший русский учёный и инженер Михаил Осипович Доливо-Добровольский изобрёл трёхфазный асинхронный двигатель с короткозамкнутым ротором.
Современные трёхфазные асинхронные двигатели являются преобразователями электрической энергии в механическую. Благодаря своей простоте, низкой стоимости и высокой надёжности асинхронные двигатели получили широкое применение. Они присутствуют повсюду, это самый распространённый тип двигателей, их выпускается 90% от общего числа двигателей в мире. Асинхронный электродвигатель поистине совершил технический переворот во всей мировой промышленности.
Огромная популярность асинхронных двигателей связана с простотой их эксплуатации, дешивизной и надежностью.
Асинхронный двигатель — это асинхронная машина, предназначенная для преобразования электрической энергии переменного тока в механическую энергию. Само слово “асинхронный” означает не одновременный. При этом имеется ввиду, что у асинхронных двигателей частота вращения магнитного поля статора всегда больше частоты вращения ротора. Работают асинхронные двигатели, как понятно из определения, от сети переменного тока.
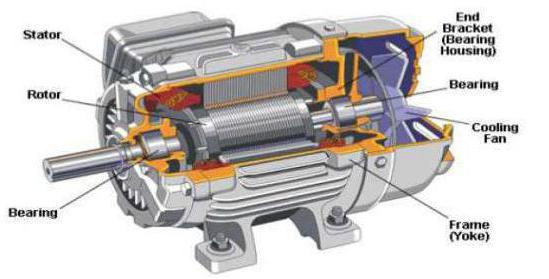
Устройство
На рисунке: 1 — вал, 2,6 — подшипники, 3,8 — подшипниковые щиты, 4 — лапы, 5 — кожух вентилятора, 7 — крыльчатка вентилятора, 9 — короткозамкнутый ротор, 10 — статор, 11 — коробка выводов.
Основными частями асинхронного двигателя являются статор (10) и ротор (9).
Статор имеет цилиндрическую форму, и собирается из листов стали. В пазах сердечника статора уложены обмотки статора, которые выполнены из обмоточного провода. Оси обмоток сдвинуты в пространстве относительно друг друга на угол 120°. В зависимости от подаваемого напряжения концы обмоток соединяются треугольником или звездой.
Роторы асинхронного двигателя бывают двух видов: короткозамкнутый и фазный ротор.
Короткозамкнутый ротор представляет собой сердечник, набранный из листов стали. В пазы этого сердечника заливается расплавленный алюминий, в результате чего образуются стержни, которые замыкаются накоротко торцевыми кольцами. Эта конструкция называется «беличьей клеткой«. В двигателях большой мощности вместо алюминия может применяться медь. Беличья клетка представляет собой короткозамкнутую обмотку ротора, откуда собственно название.
Фазный ротор имеет трёхфазную обмотку, которая практически не отличается от обмотки статора. В большинстве случаев концы обмоток фазного ротора соединяются в звезду, а свободные концы подводятся к контактным кольцам. С помощью щёток, которые подключены к кольцам, в цепь обмотки ротора можно вводить добавочный резистор. Это нужно для того, чтобы можно было изменять активное сопротивление в цепи ротора, потому что это способствует уменьшению больших пусковых токов. Подробнее о фазном роторе можно прочитать в статье — асинхронный двигатель с фазным ротором.
Принцип работы
При подаче к обмотке статора напряжения, в каждой фазе создаётся магнитный поток, который изменяется с частотой подаваемого напряжения. Эти магнитные потоки сдвинуты относительно друг друга на 120°, как во времени, так и в пространстве. Результирующий магнитный поток оказывается при этом вращающимся.
Результирующий магнитный поток статора вращается и тем самым создаёт в проводниках ротора ЭДС. Так как обмотка ротора, имеет замкнутую электрическую цепь, в ней возникает ток, который в свою очередь взаимодействуя с магнитным потоком статора, создаёт пусковой момент двигателя, стремящийся повернуть ротор в направлении вращения магнитного поля статора. Когда он достигает значения, тормозного момента ротора, а затем превышает его, ротор начинает вращаться. При этом возникает так называемое скольжение.
Скольжение s — это величина, которая показывает, насколько синхронная частота n1 магнитного поля статора больше, чем частота вращения ротора n2, в процентном соотношении.
Скольжение это крайне важная величина. В начальный момент времени она равна единице, но по мере возрастания частоты вращения n2 ротора относительная разность частот n1-n2 становится меньше, вследствие чего уменьшаются ЭДС и ток в проводниках ротора, что влечёт за собой уменьшение вращающего момента. В режиме холостого хода, когда двигатель работает без нагрузки на валу, скольжение минимально, но с увеличением статического момента, оно возрастает до величины sкр — критического скольжения. Если двигатель превысит это значение, то может произойти так называемое опрокидывание двигателя, и привести в последствии к его нестабильной работе. Значения скольжения лежит в диапазоне от 0 до 1, для асинхронных двигателей общего назначения оно составляет в номинальном режиме — 1 — 8 %.
Как только наступит равновесие между электромагнитным моментом, вызывающим вращение ротора и тормозным моментом создаваемым нагрузкой на валу двигателя процессы изменения величин прекратятся.
Выходит, что принцип работы асинхронного двигателя заключается во взаимодействии вращающегося магнитного поля статора и токов, которые наводятся этим магнитным полем в роторе. Причём вращающий момент может возникнуть только в том случае, если существует разность частот вращения магнитных полей.
Рекомендуем к прочтению — однофазный асинхронный двигатель.
Асинхронный двигатель: устройство, виды, принцип работы
Немало техники — бытовой, строительной, производственной имеют двигатели. Если задаться целью и проверить тип мотора, в 90% окажется, что стоит асинхронный двигатель. Это обусловлено простотой конструкции, высоким КПД, отсутствием электрического контакта с движущейся частью (в моделях с короткозамкнутым ротором). В общем, причин достаточно.
Содержание статьи
Что такое асинхронный двигатель и принцип его действия
Любой электродвигатель — устройство для преобразования электрической энергии в механическую. Электрический двигатель состоит из неподвижной (статор) и подвижной части (ротор). Строение статора таково, что он имеет вид полого цилиндра, внутри которого имеется обмотка. В это цилиндрическое отверстие вставляется подвижная часть — ротор. Он также имеет вид цилиндра, но меньшего размера. Между статором и ротором имеется воздушный зазор, позволяющий ротору свободно вращаться. Ротор вращается из-за наводимых магнитным полем статора токов. По способу вращения двигатели делят на синхронные и асинхронные.

Так выглядит разобранный асинхронный двигатель с короткозамкнутым ротором
Асинхронный электродвигатель отличается тем, что частота вращения ротора и магнитного поля, создаваемого статором, у него неравны. То есть, ротор вращается несинхронно с полем, что и дало название этому типу машин. Характерно, в рабочем режиме скорость его вращения меньше. Второе название этого типа двигателей — индукционные. Это название связано с тем, что движение происходит за счёт наводимых на нём токов индукции.

Асинхронный двигатель в разобранном виде: основные узлы и части
Коротко описать принцип работы асинхронного двигателя можно так. При включении мотора на обмотки статора подаётся ток, из-за чего возникает переменное магнитное поле. В область действия силовых линий этого попадает ротор, который начинает вращаться вслед за переменным полем статора.
Статор
Статор асинхронного двигателя состоит из трёх частей: корпуса, сердечника и обмотки. Корпус статора служит в качестве опоры для электродвигателя. Изготавливают его из стали или чугуна, сваркой или литьём. К прочности корпуса предъявляются высокие требования, так как при работе возникают вибрации в результате которых может сместиться ротор, что приведёт к заклиниванию мотора и выходу его из строя.

Статор асинхронного двигателя
Есть и ещё одно требование — геометрия корпуса должна быть идеальной. Между обмоткой статора и ротором зазор делают в несколько миллиметров, так что малейшие отклонения могут быть критичны.
Сердечник статора
Сердечник статора асинхронного электродвигателя изготавливают из наборных металлических пластин. Так как сердечник является магнитопроводом, металл используется магнитная электротехническая сталь. Для уменьшения потерь из-за вихревых потоков сердечник набирается из пластин, покрытых слоем диэлектрика (лак).

Сердечник статора набирается из тонких металлических изолированных пластин
Толщина одной пластины — 0,35-0,5 мм. Они собираются в единый пакет, так чтобы пазы всех пластин совпадали. В эти пазы затем укладываются витки обмотки.
Обмотка статора и количество оборотов электродвигателя
Статор асинхронного электромотора чаще всего имеет трёхфазную обмотку возбуждения. Она называется так, потому что является причиной движения ротора. Обмотка статора состоит из катушек, навитых из медной проволоки которые укладываются в пазы сердечника. Каждая обмотка может состоять из нескольких витков проволоки или из одного витка. Провод используется специальный, с лаковым покрытием, которое изолирует витки друг от друга и от стенок сердечника.
Как уже говорили, чаще всего обмотка статора асинхронного двигателя имеет три фазы. В этом случае оси катушек расположены со сдвигом 120°. При таком строении магнитное поле имеет два полюса и делает один полный оборот за один цикл трёхфазного питания. При частоте в электросети равной 50 Гц, скорость вращения поля (и ротора) 50 об/сек или 3000 об/мин.

Укладка катушек обмотки статора асинхронного двигателя
Для уменьшения скорости вращения ротора в асинхронном двигателе обмотку делают с большим количеством полюсов. Так с четырехполюсным стартером скорость вращения будет вдвое меньше — 1500 об/мин. Обмотка с шестью полюсами статора даёт втрое меньшую скорость — 1000 об/мин. С восемью полюсами — в четыре раза меньше, т. е. 750 об/мин. Ещё более «медленные» электромоторы делают очень редко.
Концы обмоток статора выводятся на клеммную коробку корпуса. Тут они могут соединяться по принципу «звезда» или «треугольник» в зависимости от типа подаваемого питания (220 В или 380 В).
Ротор
Ротор асинхронного электродвигателя бывает двух видов: короткозамкнутым и фазным. Чаще всего встречаются машины с короткозамкнутым ротором. Их преимущество в простоте конструкция и несложной технологии изготовления. Что еще важно, в таких моторах отсутствует контакт с динамической конструкцией. Это повышает долговечность, делает обслуживание более редким и простым.

Асинхронный двигатель может быть с короткозамкнутым и фазным
Асинхронные электромоторы с фазным ротором имеют более сложную конструкцию. Но они позволяют плавно регулировать скорость без дополнительных устройств, со старта имеют высокий крутящий момент. Так что приходится выбирать: более простая конструкция или возможность регулировки скорости вращения.
Устройство короткозамкнутого ротора
Ротор состоит из вала и цилиндрической конструкции из короткозамкнутых стержней. Внешне эта конструкция очень напоминает беличье колесо, поэтому так часто называют короткозамкнутую обмотку ротора.

Устройство короткозамкнутого ротора
Изначально и стержни, и замыкающие кольца изготавливались из меди. Роторы современных асинхронных двигателей мощностью до 100 кВт делают из алюминиевых стержней, с алюминиевыми же замыкающими дисками. Расстояние между стержнями заливается снова-таки алюминиевым сплавом. Получается короткозамкнутый ротор, но уже со сплошным покрытием.
Так как при работе выделяется значительное количество тепла, для охлаждения перемычки «беличьего колеса» делают с дополнительными вентиляционными лопатками. Так во время работы происходит самоохлаждение. Оно работает тем эффективнее, чем выше скорость вращения.

Как устроен асинхронный двигатель: устройство и компоновка деталей
Ротор устанавливается в статор, концы вала фиксируются при помощи крышек с вмонтированными подшипниками. Это двигатель без щеток (безщеточный). Никаких дополнительных контактов и электрических соединений. Подвижная часть мотора начинает вращаться при наличии магнитного поля на статоре. Оно возникает после подачи питания. Это поле вращается, заставляя вращаться и предметы, которые находятся в его поле. Простая и надёжная конструкция, которая обусловила популярность электрических двигателей этого типа.
Как сделан фазный ротор
Устройство фазного ротора мало чем отличается от обмотки статора. Те же наборные кольца с пазами под укладку медных катушек. Количество обмоток ротора три, соединены они обычно «звездой».

Так выглядит фазный ротор асинхронного двигателя
Концы роторных обмоток крепят к контактным кольцам из меди. Эти кольца жёстко закреплены на валу. Кроме того, они обязательно изолированы между собой, не имеют электрического контакта со стальным валом (крепятся к стержню через диэлектрические прокладки). Так как наличие колец отличительная черта этого типа движков, иногда их называют кольцевыми.

Асинхронный двигатель с фазным ротором
Для фиксации ротора к корпусу статора делают две крышки с подшипниками. На одной из крышек закрепляются щетки, которые прижимаются к кольцам на валу, за счёт чего имеют с ними хороший контакт. Для регулировки скорости вращения щетки соединены с реостатом. Изменяя его сопротивление, меняем напряжение, а с ним и скорость вращения.
Что лучше короткозамкнутый или фазный?
Несмотря на то что двигатели с фазовым ротором лучше стартуют, позволяют в процессе работы плавно менять скорость при помощи обычного реостата, чаще применяется моторы короткозамкнутого типа. В этой конструкции отсутствуют щетки, которые выходят из строя первыми. Кроме того, более простое устройство подвижной части снижает стоимость двигателя, агрегат служит дольше, уход и техобслуживание проще.

Какой лучше: короткозамкнутый ротор или фазный
Тем не менее стоит более подробно ознакомиться с достоинствами и недостатками обоих типов асинхронных двигателей. Итак, достоинства короткозамкнутого асинхронного двигателя:
- Простая конструкция.
- Лёгкое обслуживание.
- Более высокий КПД.
- Нет искрообразования.
Недостатки:
- Малый пусковой крутящий момент.
- Высокий пусковой ток (в 4-7 раз выше номинального).
- Нет возможности регулировать скорость.

Магнитное поле трехфазного статора толкает ротор
Из-за высокого пускового тока прямое включение допускается для двигателей мощностью до 200 кВт. Более мощные требуют пускорегулирующей аппаратуры. Обычно используют частотный преобразователь, который плавно увеличивает ток, обеспечивая плавный старт без перегрузок.
Преимущество асинхронного фазного двигателя:
- Быстрый и беспроблемный старт.
- Позволяет менять скорость в процессе работы.
- Прямое подключение возможно, практически без ограничения мощности.
Недостатки тоже есть: наличие щёток, возможность искрения, сложное и частое обслуживание.
Как регулируется частота вращения
Как уже писали, частота вращения ротора зависит от количества полюсов статора. Чем больше количество полюсов, тем меньше скорость. Но это не только так можно регулировать скорость вращения. Она еще зависит от напряжения и частоты питания.

Способы регулирования частоты асинхронного двигателя
Напряжение можно регулировать, установив потенциометр на входе. Частоту регулируют поставив частотный преобразователь. Частотник — более выгодное решение, так как он ещё и снижает стартовые токи и может быть программируемым.
Однофазный асинхронный двигатель
Выше рассматривался трехфазный асинхронный двигатель, в однофазном асинхронном двигателе их две. Одна рабочая, вторая вспомогательная. Вспомогательная нужна для того, чтобы придать первоначальное вращение ротору. Потому может называться ещё пусковой или стартовой.

Однофазный асинхронный двигатель имеет две обмотки: рабочую и вспомогательную (стартовую или пусковую)
Когда в статоре включена одна обмотка, она создаёт два равных магнитных поля, вращающихся в разные стороны. Если ввести в это поле ротор, который уже имеет какое-то начальное вращение, магнитное поле будет поддерживать это вращение. Но как запустить ротор на старте? Как придать ему вращение, ведь от одной обмотки возникают два равноценных магнитных поля, направленные в разные стороны. Так что с их помощью заставить вращаться ротор невозможно. В простейшем варианте вращение задаётся вручную — механически. Затем вращение подхватывает поле.
Чтобы автоматизировать запуск однофазного асинхронного двигателя и сделана вспомогательная обмотка. Она сконструирована так, что подавляет одну из составляющих магнитного поля основной обмотки и усиливает вторую. Соответственно, одна из составляющих перевешивает, задавая вращение ротора. Затем стартовая обмотка отключается, вращение поддерживает основная.
Асинхронный двигатель- Принцип работы и устройство… Motoran.ru
В какой бы сфере не участвовал человек, повсюду применяются электрические моторы. Сегодня изделия задействованы как в промышленности, так и в быту. Механизмы несут массу положительных качеств: простота, надёжность, долговечность, экологическая чистота. Характеристики дают моторам охватывать большее количество незанятых ниш, изделия уже вплотную используются в автомобилестроении.
Среди разновидностей, по количеству произведённых электрических машин, асинхронный двигатель занимает первое место. Относительная дешевизна и универсальность мотора при эксплуатации стали решающим фактором, повлиявшим на массовость выпуска. Перспективы развития агрегатов увеличиваются, поскольку сегодня нет, чище способа получить механическую работу, чем использовать электричество. В реалиях, целесообразность экологических аспектов растёт с каждым годом в геометрической прогрессии, поэтому рассмотрим установку детально.
Асинхронный двигатель в разрезе:

История асинхронного двигателя
Начало развития асинхронных двигателей было положено в 88 году девятнадцатого века, когда итальянский электротехник Галилео Феррарис опубликовал в Турине статью о теоретических основах асинхронного электродвигателя. Ошибочные выводы итальянца о небольшом коэффициенте полезного действия асинхронных двигателей вызвало большой интерес среди других инженеров. Силы большинства учёных направлены на усовершенствование изделия.
Итальянский электротехник Галилео Феррарис (1847-1897 года жизни):

После того, как в том же году статью перепечатал английский журнал, её прочитал выпускник Дармштадтского технического училища, М.О. Доливо-Добровольский. Через год, талантливый выходец из Российской Империи получил патент на трёхфазный асинхронный двигатель с короткозамкнутым ротором.
Русский электротехник Доливо-Добровольский (1862-1919 года жизни):

Труды изобретателя положили начало массовому применению электрических двигателей. Так, в Новороссийске в третьем году двадцатого века, под руководством учёного, построен первый в мире элеватор, использовавший промышленную сеть переменного трёхфазного тока с трёхфазными трансформаторами и синхронными двигателями с фазным ротором. Сегодня, трёхфазный асинхронный двигатель Добровольского, самая распространённая электрическая машина.
Устройство асинхронного двигателя
Назначение асинхронного двигателя, это преобразование энергии электричества в механическую работу. Выполнить эту задачу установке помогают две детали: статор и ротор.
Устройство статора представлено в виде неподвижной части мотора, которая взаимодействует с подвижной частью, ротором. Между ротором и статором воздушный зазор, разделяющий механизмы. Активной частью механизмов является обмотка и детали сердечника, проводящие магнитный поток, возбуждаемый электрическим током, проходящим по обмотке. С целью минимизировать магнитные потери, при перемагничивании сердечника, деталь набирают из пластин, изготовленных из электротехнической стали. Обмотка статора конструктивно равномерно укладывается проводниками в пазы сердечника, угловое расстояние 120°. Схема соединения фаз обмотки статора «треугольник» или «звезда». В целом, статор представляет собой большой электрический магнит, цель которого, создать магнитное поле.
Статор и ротор асинхронного двигателя:

Схема подключения «звезда» или «треугольник» выбирается в зависимости от напряжения питания сети. Существенную роль играют такие понятия:
Фазное напряжение, соответствует разности потенциалов между началом и концом одной фазы, или разница потенциалов между линейным и нейтральным проводом.
Линейное напряжение, разность потенциалов между двумя линейными проводами (фазами)
| Значение символов | Схема «звезда» | Схема «треугольник» |
| Uл, Uф – напряжения (линейные и фазовые), В;
Iл, Iф – ток (линейный и фазовый), А; S – мощность, Вт; P – мощность активная, Вт. |
 ; ;
|
 ; ;
|
 ;
; ;
; .
. ;
; ;
; .
.Важно! Мощность для соединения «звезда» и «треугольник» рассчитывается по одной формуле. Однако, подключение одного и того же асинхронного двигателя разными соединениями в одну и ту же сеть, приведёт к разной потребляемой мощности. Неправильное подключение способно расплавить обмотки статора.
Схемы подключений:

Поскольку асинхронный двигатель широко распространён повсеместно, на его долю приходится потребление от 45% до 50% вырабатываемой электроэнергии. Что бы снизить расход электроэнергии (почти на 50%) и не потерять в мощности и цене двигателя, в конструкции механизма используют применение совмещённых обмоток. Принцип заключается в схеме подключения нагрузки к сети. Совмещение обмоток «звезда» «треугольник» при последующем подключении к трёхфазной сети даёт в итоге систему из шести фаз, угол между магнитными потоками в которой равен 30°. Метод сглаживает кривую магнитного поля между ротором и статором, это положительно сказывается на показателях электродвигателя.
В зависимости от конструкции ротора, асинхронный двигатель условно делят на виды: короткозамкнутый ротор, фазный ротор. Статор обоих механизмов одинаков, отличительная черта, обмотка. Сердечник ротора так же выполнен из электротехнической стали, методом комбинирования прямых и косых стыков пластин.
Составные детали двигателя размещаются в корпусе. Для небольших моторов корпус делают цельнолитым, материал изделия, чугун. Кроме того, применяют сплав алюминия, либо сталь. Некоторые корпуса в маленьких двигателях совмещают функцию сердечника, в мощных двигателях корпус выполняется из составных частей.
Поскольку асинхронный мотор относится к электрической машине, изделие применяется как в режиме двигателя, так и в режиме генератора. Однако, как генератор, асинхронный механизм имеет ряд недостатков, которые не позволили машине использоваться массово в этом качестве.
Тип подвижной части
Как уже упоминалось, в зависимости от того, в каком виде выполнена подвижная часть, асинхронные двигатели делят:
- Асинхронный двигатель с короткозамкнутым ротором.
Такая конструкция носит название «беличья клетка» за внешнюю схожесть. Конструктивно механизм состоит из стержней, которые замкнуты по торцам кольцами. Материал детали, медь или алюминий. В двигателях малой и средней мощности конструкцию выполняют, заливая расплавленный алюминий в пазы сердечника ротора, заодно выполняются кольца и торцевые лопасти. Назначение лопастей, вентилировать мотор. В мощных двигателях стержни клетки делают из меди, торцы стержней приваривают к кольцам.
Наличие зубцов с низким магнитным сопротивлением, в сравнении с сопротивлением обмотки, вызывает пульсацию магнитного потока. Пульсация приводит к росту гармонических токов напряжения электродвижущей силы. Чтобы снизить это явление, а так же уменьшить шум, пазы ротора или статора делают скошенными.
Недостаток короткозамкнутого ротора в том, что пусковой момент двигателя этой конструкции небольшой, наряду со значительным показателем пускового тока. Применение этих моторов целесообразно в случаях, если не требуются большие пусковые моменты. Достоинство: простота изготовления, низкая инерция, нет контакта со статической частью, как следствие, долговечность и приемлемая стоимость обслуживания.
Короткозамкнутый ротор асинхронного двигателя:

- Асинхронный двигатель с фазным ротором.
Чаще конструкция имеет трёхфазную обмотку, иногда многофазную. Как правило, обмотка соединена по схеме «звезда» с выводом на кольца контакта, вращающиеся с валом двигателя. По кольцам контакта скользят щётки, выполненные из металла и графита. С помощью этих щёток, в цепь обмотки ротора встраивают реостат, отвечающий за регулировку пуска. Регулировка возможна, поскольку реостат играет роль добавочного активного сопротивления для каждой фазы.
Фазный ротор асинхронного двигателя:

Фазный ротор двигателя при включении максимально увеличивает момент пуска и уменьшает ток, это возможно из-за применения реостата. Такие характеристики приводят в действие механизмы, для которых характерна большая нагрузка в момент пуска.
Принцип работы
Рассмотрим асинхронный двигатель принцип работы и устройство. Для корректного подключения агрегата к сети, обмотки соединяются по схеме «звезда» или «треугольник». Действие механизма основано на использовании вращающегося магнитного поля статора. Частота вращения многофазной обмотки переменного поля (n1) определяется по формуле:

Здесь:
- f – частота сети в Герцах;
- p – Количество пар полюсов (как правило, 1-4 пары, поскольку чем их больше, тем ниже мощность и КПД, использование полюсов даёт возможность не применять редуктор, при низкой частоте вращения).
Магнитное поле, пронизывающее статор с обмоткой пронизывает и обмотку ротора. За счёт этого индуцируется электродвижущая сила. Электродвижущая сила самоиндукции в обмотке статора (Е1) направлена навстречу приложенному напряжению сети, ограничивая величину тока в статоре. Поскольку обмотка ротора замкнута, или идёт через сопротивление (короткозамкнутый ротор в первом случае, фазный ротор во втором случае), то под действием электродвижущей силы ротора (Е2) в ней образуется ток. Взаимодействие индуцируемого тока в обмотке ротора и магнитного поля статора создаёт электромагнитную силу (Fэл). Направление силы определяется по правилу левой руки.

Согласно правилу: левая рука устанавливается таким образом, что бы магнитно силовые линии входили в ладонь, а вытянутые четыре пальца направлялись вдоль движения тока в обмотке. Тогда отведённый большой палец покажет направление действия электромагнитной силы для конкретного проводника с током.
Совокупность электромагнитных сил двигателя будет равна общему электромагнитному моменту (М), который приводит в действие вал электродвигателя с частотой (n2). Скорость ротора не равна скорости вращения поля, поэтому эта скорость называется асинхронной скоростью. Вращающий момент в асинхронном двигателе развивается только при асинхронной скорости, когда скорость вращения ротора не равна скорости вращения магнитного поля. Важно, что бы при работе двигателя скорость ротора была меньше скорости поля (n2< n1). Для определения величины отставания введён термин «скольжение», показатель определяется по формуле:
 Таким образом, частота вращения ротора (обороты) будет равна:
Таким образом, частота вращения ротора (обороты) будет равна:

Принцип работы асинхронного электрического двигателя легко объясняется с помощью устройства, называющегося диск Арго – Ленца.

Постоянный магнит закрепляют на оси, которая устанавливается в устройстве, способном обеспечить её вращение. Перед полюсами магнита (N-S) помещают диск, выполненный из меди. Диск так же крепится на оси и свободно вращается вокруг неё.
Если вращать магнит за рукоятку, диск тоже будет вращаться в том же направлении. Эффект объясняется тем, что магнитные линии поля, создаваемые магнитом, замыкаются от северного полюса к южному полюсу, пронизывая диск. Эти линии образуют в диске вихревые токи, которые взаимодействуя с полем, приводят к возникновению силы, вращающей диск. Закон Ленца гласит, что направление всякого индукционного тока противодействует величине, вызвавшей его. Вихревые токи пытаются остановить магнит, но поскольку это не возможно, диск следует за магнитом.
Примечательно, что скорость вращения диска всегда меньше скорости вращения магнита. В асинхронных электродвигателях магнит заменяет вращающееся магнитное поле, созданное токами трёхфазной обмотки статора.
Подключение двигателя
До того, как подключить асинхронный двигатель, ознакомьтесь с его паспортом. Обмотки статора двигателя соединены «звездой» или «треугольником», в зависимости от напряжения сети. Если в паспорте указано, что механизм рассчитан на применение 220/380В, это означает, что при подключении мотора на 220В обмотки соединяют схемой «треугольник», если напряжение сети 380В, обмотки соединяют схемой «звезда».
Маркировка на коробке для клемм:

Сбор схем проводится в коробке для клемм, расположенной на корпусе электродвигателя, перед выполнением работ, коробку разбирают. Начало каждой обмотки именуется U1, V1, W1 соответственно. Концы обмоток подписываются так же U2, V2, W2. При отсутствии в коробке для клемм маркировки выводов, начало и конец обмотки определяют, используя мультиметр.
Процедура выполняется следующим образом:
- Подписываем бирки, которыми будем маркировать выводы обмоток;
- Определяем принадлежность шести выводов к трём обмоткам. Для этого берём мультиметр, переключаем в положение «200 Ом». Один щуп подключаем к любому из шести проводов, второй щуп используем, что бы прозвонить оставшиеся пять выводов. При нахождении искомого провода показания прибора будут отличными от «0».
- Эти два провода — первая обмотка двигателя. Надеть на провода бирки (U1, U2) в произвольном порядке.

- Проделываем аналогичную процедуру со второй и третьей обмоткой. Выводы второй обмотки маркируем (V1, V2), выводы третьей обмотки маркируем (W1, W2).
- Определяем вид подключения обмоток (согласованный или встречный).
Важно! Согласованное подключение создаёт электродвижущую силу, которая будет равна сумме сил обмоток. Встречное подключение даст электродвижущей силе нулевое значение, поскольку силы будут направлены друг навстречу другу.
- Катушку (U1, U2) соединяем с катушкой (V1, V2), после чего на выводы (U1, V2) подаём переменное напряжение 220 вольт.
- На выводах (W1, W2) меряем переменное напряжение. Если значение напряжения равно нулю, то обмотки подключены встречно, если прибор показывает некоторое значение, обмотки (U1, U2) и (V1, V2) подключены согласованно.
- Аналогичным образом определяем правильность подключения третьей обмотки.
- В зависимости от типа двигателя подключаем промаркированные концы проводов схемой «звезда» или «треугольник».
- Подаём питание на двигатель, проверяем работу.
При необходимости обратного вращения асинхронного двигателя, для этого меняют местами два провода подключаемого источника трёхфазного напряжения.
Подключение двигателя на одну фазу
Для бытовых нужд использование трёхфазного мотора проблематично, поскольку отсутствует требуемое напряжение. Решение проблемы, использовать однофазный асинхронный двигатель. Такой мотор оснащен статором, однако конструктивно изделие отличается количеством и расположением обмоток, а так же схемой их запуска.
Схема подключения однофазного двигателя:

Так, однофазный асинхронный двигатель со статором из двух обмоток будет располагать их со смещением по окружности под углом 90°. Соединение катушек будет параллельным, одна — пусковая, вторая — рабочая. Что бы создать вращающееся магнитное поле, дополнительно вводят активное сопротивление, или конденсатор. Сопротивление создаёт сдвиг фаз токов обмотки, близкий к 90°, что помогает создать вращающее магнитное поле.
При использовании статором асинхронного двигателя одной катушки, подключение источника питания в одну фазу создаст пульсирующее магнитное поле. В обмотке ротора появится переменный ток, который создаст магнитный поток, как следствие работа двигателя не произойдёт. Для запуска такого агрегата создают дополнительный толчок, подключив конденсаторную схему пуска.
Асинхронный двигатель, рассчитанный на подключение к трёхфазному источнику питания, работает и от одной фазы. Пользователей интересует вопрос, как подключить асинхронный двигатель на 220В. Помните, что подключение снизит коэффициент полезного действия двигателя, а так же повлияет на мощность и показатели пуска. Для выполнения задачи надо из трёх обмоток статора собрать схему, сделав так, что бы обмоток было две. Одна обмотка будет рабочей, вторая используется для запуска агрегата. Как пример, предположим, что есть три катушки с начальными выходами (U1, V1, W1) и конечными выходами (U2, V2, W2). Создаём первую рабочую обмотку, объединив концы (V2, W2), а начало (V1, W1) подключаем к сети в 220В. Пусковой обмоткой будет оставшаяся катушка, которую подключают к питанию через конденсатор, соединив её с ним последовательно.
Асинхронный двигатель с двумя скоростями
Иногда необходимо изменить скорость асинхронного двигателя. Механизмы с управлением от электронного блока дорогие, поэтому применяют двухскоростной асинхронный двигатель. Принцип такого механизма в том, что обмотку в этом моторе подключают особым образом, по схеме Даландера, что меняет скорость вращения.
Схема подключения Даландера:

Подключая выводы U1, V1, W1 к напряжению в три фазы, двигатель вписывается в схему «треугольник» и работает на пониженной скорости. Если выводы (U1, V1, W1) замкнуть, а питание кинуть на (U2, V2, W2), то получится двухскоростной электродвигатель, работающий по схеме «двойная звезда», увеличивающей скорость в два раза.
Векторное управление для асинхронного электродвигателя «на пальцах»
В предыдущей статье «Векторное управление электродвигателем «на пальцах» рассматривалась векторная система управления для синхронных электродвигателей. Статья получилась большой, поэтому вопрос про асинхронные электродвигатели (induction motors) был вынесен в отдельную публикацию. Данная статья является продолжением предыдущей и опирается на приведенные там объяснения принципов работы электродвигателей. Она расскажет об особенностях работы асинхронного двигателя применительно к векторному управлению, а также покажет отличия в структуре векторной системы управления между синхронной и асинхронной машиной.
Как работает асинхронный электродвигатель? Наиболее популярное объяснение говорит что-то типа «статор создает вращающееся магнитное поле, которое наводит ЭДС в роторе, из-за чего там начинают течь токи, в результате ротор увлекается полем статора и начинает вращаться». Лично я от такого объяснения всю физику процесса понимать не начинаю, поэтому давайте объясню по-другому, «на пальцах».
Все же видели видео, как магнит взаимодействует с медным цилиндром? Особенно обратите внимание на диапазон времени с 0:49 до 1:03 – это уже самый настоящий асинхронный двигатель:
Эффект происходит из-за появления в цилиндре вихревых токов. Согласно закону электромагнитной индукции, открытого Майклом Фарадеем, при изменении магнитного потока замкнутого контура в нем возникает ЭДС (по-простому считайте, что напряжение). Эта ЭДС, применительно к медному цилиндру, тут же вызывает появление в цилиндре тока. При этом этот ток тоже создает свой, ответный магнитный поток, направленный ровно в противоположную сторону от изменения потока магнита, который мы подносим:
Индукционный ток, возникающий в замкнутом проводящем контуре, имеет такое направление, что создаваемое им магнитное поле противодействует тому изменению магнитного потока, которым был вызван данный ток.
Это можно понимать так, что замкнутый контур сопротивляется изменению магнитного потока внутри себя. Если вы резко поднесёте магнит к медному цилиндру, т.е. сделаете резкое изменение магнитного потока, то в цилиндре потекут такие ответные токи, что магнитное поле внутри цилиндра в первый момент времени будет равно нулю: магнитное поле поднесенного магнита будет полностью скомпенсировано магнитным полем токов цилиндра (с допущениями, конечно). Если магнит поднести и держать, то токи в цилиндре из-за наличия активного сопротивления меди постепенно спадут, а поле цилиндра, создаваемое его токами, пропадет: магнитный поток постоянного магнита «прорвется» внутрь цилиндра, как будто никакого цилиндра и нет. Но стоит попытаться убрать магнит, как цилиндр отреагирует снова – теперь он будет пытаться сам «воссоздать» внутри себя пропадающий магнитный поток, т.е. будет опять сопротивляться изменению магнитного потока, в данном случае его исчезновению. Но что значит «воссоздать магнитный поток»? Это значит, что на какое-то время медный цилиндр можно считать условно «постоянным магнитом» – в нем циркулирует вихревой ток, создающий магнитное поле (на этом же принципе «висят» сверхпроводники в магнитном поле, но это совсем другая история).
Давайте теперь обратимся к конструкции асинхронного двигателя. Ротор асинхронного двигателя условно можно представлять себе также в виде медного цилиндра. Но в реальных конструкциях это некая решётка в виде «беличьей клетки» (рисунок 1) из меди или алюминия, совмещенная с магнитопроводом (шихтованное железо).
Рисунок 1. Ротор асинхронного двигателя типа «беличья клетка» с током в одной из «рамок» беличьей клетки, реагирующей на нарастание внешнего магнитного поля.
На рисунке схематично показано протекание тока в одной из «рамок», т.е. в некоторых прутьях беличьей клетки, если сверху поднести магнит (создать ток в статоре). На самом деле ток в этом случае протекает во всех прутьях, кроме, условно, верхнего и нижнего, для которых изменения потока нет (но они бы среагировали на горизонтально поднесенный магнит).
Помните ещё из начала прошлой статьи картинку со схематическим изображением двухфазной синхронной машины, где ротором был магнит? Давайте теперь сделаем из неё асинхронный двигатель: вместо магнита поставим две перпендикулярные короткозамкнутые катушки, символизирующие медный цилиндр ротора (рисунок 2).
Рисунок 2. Схематическое изображение двухфазного асинхронного двигателя с короткозамкнутым ротором.
Замена цилиндра на две катушки для пояснения принципа работы (или моделирования) корректна, точно также как корректна замена трехфазной обмотки на двухфазную. Только в этом случае мы заменяем… «бесконечнофазную обмотку» цилиндра (бесконечное число рамок) на две катушки с эквивалентной индуктивностью и сопротивлением. Ведь двумя катушками можно создать точно такой же вектор тока и магнитного потока, как и цилиндром.
А теперь давайте сделаем на короткое время из асинхронной машины синхронную. Подадим в катушку оси β постоянный ток и подождем секунды две-три, пока в роторе перестанут течь ответные токи: «поднесем внешний магнит». То есть дождемся спадания токов в роторе, чтобы магнитное поле статора «пронзило ротор» и никто ему не мешал. Что теперь будет, если выключить ток в статоре? Правильно, на те же две-три секунды, пока ток ротора этому противится, мы из ротора получим «обычный магнит» (рисунок 3).
Рисунок 3. Асинхронный двигатель, когда только что выключили постоянный ток по фазе β – течет ток в роторе ird.
Что же мы ждем? Быстрее, пока магнит не пропал, рисуем вдоль него привычную ось d (как в синхронной машине) и перпендикулярную ей ось q, привязанные к ротору. Включаем структуру векторного управления синхронной машиной, подаем ток по оси q, создавая момент, поехали!
Так можно даже действительно сделать несколько оборотов, пока наш сахарный магнит не растаял, а ось d не ушла в небытие. Что же делать? Давайте не будем выключать ток по оси d, подпитывая наш магнит! И опять же сохраним структуру векторного управления синхронной машиной, просто подав задание по оси d (раньше там был ноль). Итак, смотрим на рисунок 4: оси d, q по датчику положения «приделаны» к ротору, двигатель стоит, подан ток по оси d в статоре, что в данном случае для стоячей машины совпадает с осью β. Тока по оси q пока нет: ждем, пока ротор «намагнитится». И вот подаем ток isq (s – статор)! Поехали!
Рисунок 4. Подадим ток в ось d, намагнитив машину, подготовив всё для подачи тока в ось q статора.
Далеко ли мы уедем таким методом барона Мюнхгаузена? К сожалению, нет. Смотрите, что произошло (рисунок 5):
Рисунок 5. А магнит-то сполз!
Двигатель начал крутиться, но через некоторое время после того, как мы подали ток в ось q, образовав суммарный ток is и «прибив» этот вектор к положению ротора, магнит в роторе «съехал»! И встал ровно вдоль вектора is. Ротор же не понимает, где мы нарисовали ему оси d, q… Ему все равно, крутился он или нет. Важно, что его внутренний «наведенный магнит» в конечном счете хочет стать сонаправленным с магнитным потоком статора, «подчиниться» внешнему потоку. Из-за съехавшего магнита двигатель перестанет крутиться: мало того, что между магнитом ротора и током iq нет желаемых 90 градусов, так еще и ток оси d теперь его тянет в противоположную сторону, компенсируя момент, создаваемый током iq. Метод барона Мюнхгаузена не удался.
Что же делать с ускользающим магнитом ротора? А давайте сделаем структуру векторного управления асинхронного двигателя не в осях d,q, приделанных к ротору, а в других осях, приделанных именно к текущему положению «магнита ротора» – назовем их оси x,y, чтобы отличать от d,q. По «научному» – это оси, ориентированные по потокосцеплению ротора. Но как же узнать, где конкретно сейчас это потокосцепление ротора, т.е. куда повернут магнит в роторе? Его положение зависит… во-первых, от положения самого ротора (датчик положения у нас есть, хорошо), во-вторых, от токов статора (создающих поток статора, по которому и собирается в конечном счете повернуться магнит ротора), а в-третьих от параметров роторной цепи – индуктивности и сопротивления «медного цилиндра» (он же беличья клетка, он же роторная обмотка, он же цепь ротора). Поэтому… зная всё это, положение «магнита» ротора можно просто вычислять по нескольким дифференциальным уравнениям. Делает это так называемый наблюдатель потокосцепления ротора, выделенный цветом на итоговой структурной схеме векторного управления асинхронным двигателем (рисунок 6).
Рисунок 6. Векторная датчиковая структура управления асинхронным двигателем
В наблюдатель заводятся показания с датчика положения ротора, а также текущие токи статора в осях α, β. На выходе наблюдателя – положение «магнита» ротора, а именно угол наблюдаемого потокосцепления ротора . В остальном структура полностью аналогична таковой для синхронной машины, только оси d,q переименованы в x,y, а на ось x подано задание тока, который будет поддерживать наш «магнит» в роторе. Также на многих обозначениях добавлен индекс “s”, чтобы показать, что данная величина имеет отношение к статору, а не к ротору. Также надо отметить, что в западной литературе не используют оси x,y: у них ось d всегда направлена по полю ротора, что для асинхронного двигателя, что для синхронного. Наши ученые еще в советское время разделили оси d,q и x,y, чтобы исключить путаницу: d,q прикреплены к ротору, а x,y к полю ротора.
Что же получается? Магнит ротора всё время скользит, сползает от текущего положения на роторе в сторону тока оси y. Чем больше этот ток, тем сильнее скольжение. Наблюдатель в реальном времени вычисляет положение этого магнита и «подкручивает» оси x,y всё время вперед по отношению к осям d,q (положению ротора). Ось x всегда соответствует текущему положению потокосцепления в роторе – положению «магнита». Т.е. оси x,y бегут всегда (в двигательном режиме) немного быстрее вращения ротора, компенсируя скольжение в нем. Токи в роторе, если их измерить или промоделировать, получаются синусоидальными. Только изменяются они не с частотой статорных токов, а с частотой этого скольжения, т.е. очень медленно. Если в статоре промышленного асинхронника 50Гц, то при работе под нагрузкой частота тока в роторе – единицы герц. Вот, собственно, и весь секрет векторного управления для асинхронного двигателя.
Чем векторное управление асинхронным двигателем лучше, чем скалярное? Скалярное управление это такое, когда к двигателю прикладывается напряжение заданной частоты и амплитуды – например, 380В 50Гц. И от нагрузки на роторе оно не зависит – никаких регуляторов токов, векторов… Просто задается частота напряжения и его амплитуда – скалярные величины, а токи и потоки в двигателе пусть сами себе удобное место находят, как хотят. В установившемся режиме работы двигателя векторное управление неотличимо от скалярного – векторное точно также будет прикладывать при номинальной нагрузке те же, скажем, 380В, 50Гц. Но в переходных режимах… если нужно быстро запустить двигатель с заданным моментом, если нужно отрабатывать диаграмму движения, если есть импульсная нагрузка, если нужно сделать генераторный режим с определенным уровнем мощности – всё это скалярное управление или не может сделать, или делает это с отвратительными, медленными переходными процессами, которые могут к тому же «выбить защиту» преобразователя частоты по превышению тока или напряжения звена постоянного тока (двигатель колеблется и может запрыгивать в генераторный режим, к которому преобразователь частоты не всегда приспособлен).
В векторной же структуре «всё под контролем». Момент вы задаете сами, поток тоже. Можно ограничить их на нужном уровне, чтобы не превысить уставок защиты. Можно контролируемо форсировать токи, если кратковременно нужно сделать в несколько раз больший момент. Можно регулировать не только момент двигателя, но и поток (ток оси x): если нагрузка на двигателе мала, то нет никакого смысла держать полный поток в роторе (делать магнит «номинального режима») – можно ослабить его, уменьшив потери. Можно стабилизировать скорость регулятором скорости с высокой точностью и быстродействием. Можно использовать асинхронный привод в качестве тягового (в транспорте), задавая требуемый момент тяги. В общем, для сложных применений с динамичной работой двигателя векторное управление асинхронным двигателем незаменимо.
Также есть отличительные особенности векторного управления асинхронного двигателя от синхронного. Первая – это датчик положения. Если для синхронного привода нам нужно знать абсолютное положение ротора, чтобы понять, где магнит, то в асинхронном приводе этого не требуется. Ротор не имеет какой-то выраженной полюсной структуры, «магнит» в нем постоянно скользит, а если посмотреть в формулы наблюдателя потокосцепления ротора, то там не требуется знания положения: в формулы входит только частота вращения ротора (на самом деле есть разные формулы, но в общем случае так). Поэтому на датчике можно сэкономить: достаточно обычного инкрементального энкодера для отслеживания частоты вращения (или даже тахогенератора), абсолютные датчики положения не требуются. Вторая особенность – управление потоком в асинхронном электродвигателе. В синхронной машине с постоянными магнитами поток не регулируется, что ограничивает максимальную частоту вращения двигателя: перестает хватать напряжения на инверторе. В асинхронном двигателе, когда это случается… просто уменьшаете задание по оси x и едете дальше! Максимальная частота не ограничена! Да, от этого будет снижаться момент двигателя, но, главное, ехать «вверх» можно, в отличие от синхронной машины (по-правде там тоже можно, но недалеко, не для всех двигателей и с кучей проблем).
Точно также существуют бездатчиковые алгоритмы векторного управления асинхронным двигателем, которые оценивают угол потокосцепления ротора не используя сигнал датчика положения (или скорости) вала ротора. Точно также, как и для синхронных машин, в работе таких систем есть проблемы на низкой частоте вращения ротора, где ЭДС двигателя мала.
Также следует сказать пару слов о роторе. Если для промышленных асинхронных двигателей его удешевляют, используя алюминиевую беличью клетку, то в тяге, где массогабаритные показатели важнее, наоборот, могут использовать медный цилиндр. Так, во всеми любимом электромобиле Tesla стоит именно асинхронный электродвигатель с медным ротором (рисунок 7)
Рисунок 7. Ротор асинхронного электродвигателя Tesla Model S в стальной обшивке (фото из разных источников за разные годы)
Вот, собственно, и всё, что я хотел сказать про асинхронный двигатель. В данной обзорной статье не рассмотрены многие тонкости, такие как регулятор потока ротора, возможное построение векторной структуры в других осях координат, математика наблюдателя потокосцепления ротора и многое другое. Как и в конце прошлой статьи, за дальнейшими подробностями отсылаю читателя к современным книгам по приводу, например к «Анучин А. С. Системы управления электроприводов. МЭИ, 2015».
На каком микроконтроллере можно сделать полноценное векторное управление, читайте, например, в статье «Новый отечественный motor-control микроконтроллер К1921ВК01Т ОАО «НИИЭТ», а как это отлаживать в статье «Способы отладки ПО микроконтроллеров в электроприводе». Также наша фирма ООО «НПФ Вектор» предлагает разработку на заказ систем управления электродвигателями и другим электрооборудованием, примеры выполненных проектов можно посмотреть на нашем сайте.
P.S.
У специалистов прошу прощения за не совсем корректное обращение с некоторыми терминами, в частности с терминами «поток», «потокосцепление», «магнитное поле» и другими – простота требует жертв…
Синхронный и асинхронный двигатель: отличия, принцип работы, применение
Классификация двигателей основывается на разных параметрах. По одному из них, различают синхронный и асинхронный двигатель. Отличия приборов, общая характеристика и принцип работы описаны в статье.
Синхронный двигатель
Этот тип двигателя способен работать одновременно и в качестве генератора, и как, собственно, двигатель. Его устройство сродни синхронному генератору. Характерной особенностью двигателя является неизменяемая частота роторного вращения от нагрузки.
Эти виды двигателей широко применяются во многих сферах, например, для электрических проводов, которым необходима постоянная скорость.
Принцип работы синхронного двигателя
В основу его функционирования положено взаимодействие вращающегося магнитного поля якоря и магнитных полей индукторных полюсов. Обычно якорь находится в статоре, а индуктор распологается в роторе. Для мощных моторов используются электрические магниты для полюсов, а для слабых — постоянные.
Принцип работы синхронного двигателя включает в себя (кратковременно) и асинхронный режим, который обычно применяют для разгона до необходимой (то есть номинальной) скорости вращения. В это время индукторные обмотки замыкаются накоротко или посредством реостата. После достижения необходимой скорости индуктор начинают питать постоянным током.
Преимущества и недостатки
Основными минусами этого вида двигателя являются:
- необходимость питания обмотки постоянным током;
- сложность запуска;
- скользящий контакт.
Большинство генераторов, где бы они ни использовались, являются синхронными. Преимуществами таких двигателей в целом являются:
Асинхронный двигатель
Данный вид устройста представляет механизм, направленный на трансформацию электрической энергии переменного тока в механическую. Из самого названия «асинхронный» можно сделать вывод, что речь идет о неодновременном процессе. И действительно, частота вращения магнитного поля статора здесь выше роторной всегда.
Такое устройство состоит из статора цилиндрической формы и ротора, в зависимости от вида которого асинхронные двигатели короткозамкнутые могут быть и с фазным ротором.
Принцип действия
Работа двигателя осуществляется на основе взаимодействия магнитного статорного поля и наводящихся этим же полем токов в роторе. Вращающий момент появляется тогда, когда имеется разность частоты вращения полей.
Резюмируем теперь, чем отличается синхронный двигатель от асинхронного. Чем объясняется широкое применение одного типа и ограниченное — другого?
Синхронный и асинхронный двигатель: отличия
Отличие работы двигателей — в роторе. У синхронного типа он заключается в постоянном или электрическом магните. Благодаря притягиванию разноименных полюсов вращающееся поле статора влечет и магнитный ротор. Их скорость получается одинаковой. Отсюда и название — синхронный.
 В нем можно добиться, в отличие от асинхронного, даже опережения напряжения по фазам. Тогда устройство, подобно батареям конденсатора, может применяться для увеличения мощности.
В нем можно добиться, в отличие от асинхронного, даже опережения напряжения по фазам. Тогда устройство, подобно батареям конденсатора, может применяться для увеличения мощности.Асинхронные двигатели, в свою очередь, просты и надежны, но их недостатком является трудность регулировки частоты вращения. Для реверсирования трехфазного асинхронного двигателя (то есть изменения направления его вращения в противоположную сторону) меняют расположение двух фаз или двух линейных проводов, приближающихся к обмотке статора.
Если рассматривать частоту вращения, то имеют и здесь синхронный и асинхронный двигатель отличия. В синхронном типе этот показатель является постоянным, в отличие от асинхронного. Поэтому первый используют там, где необходима постоянная скорость и полная управляемость, например, в насосах, вентиляторах и компрессорах.
Выявить на том или ином устройстве наличие рассматриваемых типов приборов очень просто. На асинхронном двигателе будет не круглое число оборотов (например, девятьсот тридцать в минуту), в то время как на синхронном — круглое (например, тысяча оборотов в минуту).
И те, и другие моторы управляются достаточно сложно. Синхронный тип имеет жесткую характеристику механики: при любой меняющейся нагрузке на вал мотора частота вращения будет одной и той же. При этом нагрузка, конечно, должна меняться с учетом того, чтобы двигатель способен ее выдержать, иначе это приведет к поломке механизма.

Так устроен синхронный и асинхронный двигатель. Отличия обоих видов обуславливают сферу их использования, когда один вид справляется с задачей оптимальным образом, для другого это будет проблематичным. В то же время можно встретить и комбинированные механизмы.
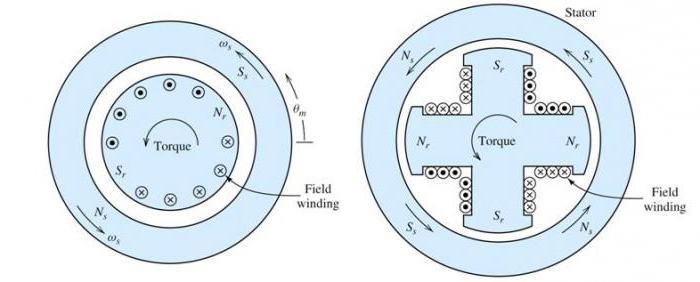
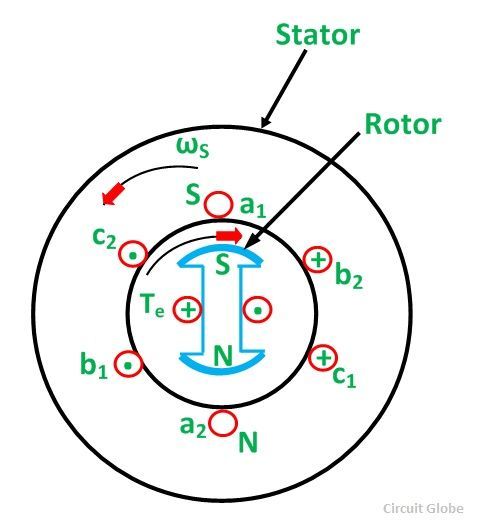
Принцип работы синхронного двигателя
Статор и ротор являются двумя основными частями синхронного двигателя. Статор — это неподвижная часть двигателя, а ротор — их вращающаяся часть. Статор возбуждается трехфазным источником питания, а ротор возбуждается источником постоянного тока.
Термин «возбуждение» означает индукцию магнитного поля в статоре и роторе двигателя. Основная цель возбуждения — преобразовать статор и ротор в электромагнит.
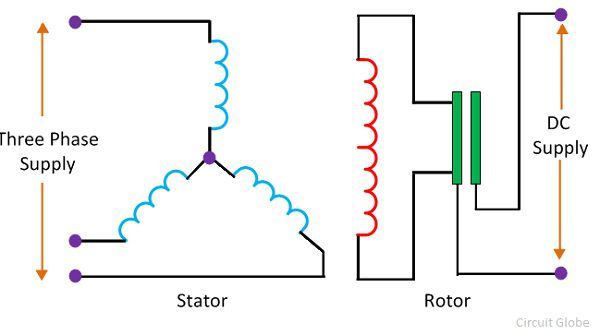 Трехфазное питание индуцирует северный и южный полюсы статора. Трехфазное питание синусоидальное. Полярность (положительная и отрицательная) их волны меняется после каждого полупериода, и по этой причине северный и южный полюсы также меняются. Таким образом, можно сказать, что на статоре возникает вращающееся магнитное поле.
Трехфазное питание индуцирует северный и южный полюсы статора. Трехфазное питание синусоидальное. Полярность (положительная и отрицательная) их волны меняется после каждого полупериода, и по этой причине северный и южный полюсы также меняются. Таким образом, можно сказать, что на статоре возникает вращающееся магнитное поле.
Магнитное поле возникает на роторе из-за источника постоянного тока. Полярность источника постоянного тока становится фиксированной, и, таким образом, на роторе возникает стационарное магнитное поле. Термин «стационарный» означает, что их северный и южный полюсы остаются неизменными.
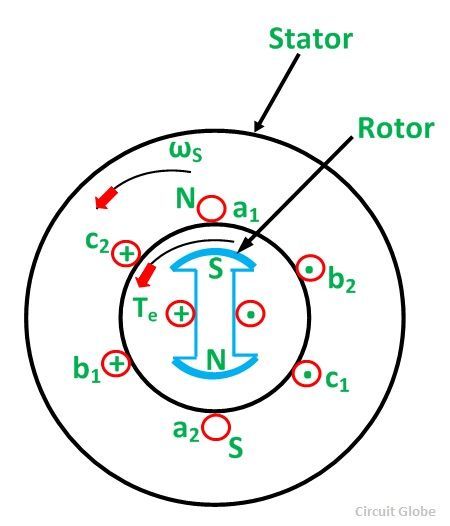
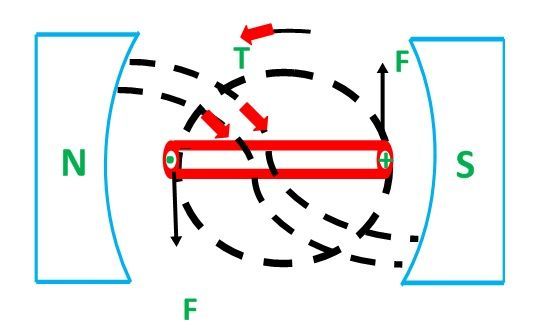
Скорость, с которой вращается магнитное поле, называется синхронной скоростью. Синхронная скорость двигателя зависит от частоты источника питания и количества полюсов двигателя.
N S = 120f / P
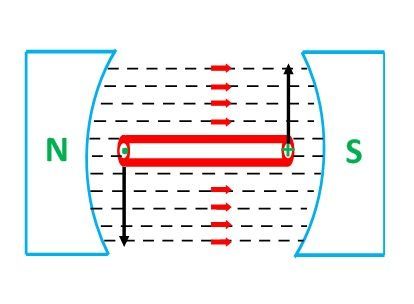
Когда противоположные полюса статора и ротора обращены друг к другу, между ними возникает сила притяжения.Сила притяжения развивает крутящий момент в направлении против часовой стрелки. Крутящий момент — это сила, которая перемещает объект во вращении. Таким образом, полюса ротора тянулись к полюсам статора.
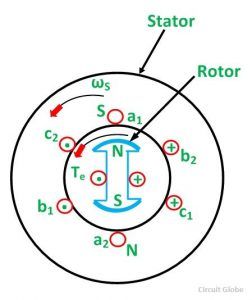
После каждого полупериода полюс статора меняется на противоположное. Положение ротора остается неизменным из-за инерции. Инерция — это тенденция объекта оставаться в одном положении.
Когда одинаковые полюса статора и ротора обращены друг к другу, между ними возникает сила отталкивания и крутящий момент развивается по часовой стрелке.
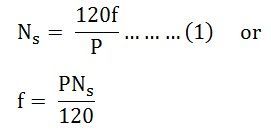
Давайте разберемся в этом с помощью схемы. Для простоты рассмотрим, что у двигателя два полюса. На рисунке ниже противоположные полюсы статора и ротора обращены друг к другу. Так между ними возникает сила притяжения.
 После полупериода полюса статора меняются местами. Одинаковые полюса статора и ротора обращены друг к другу, и между ними возникает сила отталкивания.
После полупериода полюса статора меняются местами. Одинаковые полюса статора и ротора обращены друг к другу, и между ними возникает сила отталкивания.
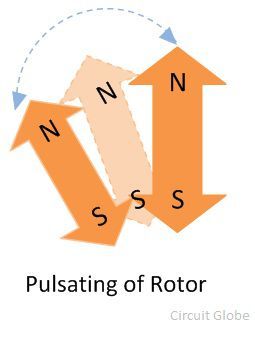
 Неоднонаправленный крутящий момент приводит к пульсации ротора только в одном месте, и по этой причине синхронный двигатель не запускается автоматически.
Неоднонаправленный крутящий момент приводит к пульсации ротора только в одном месте, и по этой причине синхронный двигатель не запускается автоматически.
 Для запуска двигателя ротор вращается с помощью внешних средств. Таким образом, полярность ротора также изменилась вместе со статором. Полюса статора и ротора блокируют друг друга, и в двигателе возникает однонаправленный крутящий момент. Ротор начинает вращаться со скоростью вращающегося магнитного поля, или, можно сказать, с синхронной скоростью.
Для запуска двигателя ротор вращается с помощью внешних средств. Таким образом, полярность ротора также изменилась вместе со статором. Полюса статора и ротора блокируют друг друга, и в двигателе возникает однонаправленный крутящий момент. Ротор начинает вращаться со скоростью вращающегося магнитного поля, или, можно сказать, с синхронной скоростью.
Скорость двигателя фиксированная, и двигатель постоянно вращается с синхронной скоростью.
.▷ Синхронные и асинхронные двигатели — где их использовать?
Многие люди часто путаются с терминами «синхронные» и «асинхронные двигатели» и с их областями применения. Именно поэтому эту статью написал один из новейших членов Электротехнического сообщества. Проверьте это ниже:
Следующая информация касается общих принципов работы синхронных и асинхронных двигателей, их преимуществ, а также где они обычно используются и чего можно достичь с помощью каждого из этих двигателей.
Давайте сначала сконцентрируемся на их принципах работы …
Синхронные и асинхронные двигатели — Принципы работы
Синхронные двигатели
Это типичный электродвигатель переменного тока, способный обеспечивать синхронную скорость. В этих двигателях статор и ротор вращаются с одинаковой скоростью, что обеспечивает синхронизацию. Основной принцип работы заключается в том, что когда двигатель подключен к сети, электричество течет в обмотки статора, создавая вращающееся электромагнитное поле.Это, в свою очередь, индуцируется на обмотках ротора, который затем начинает вращаться.
Требуется внешний источник постоянного тока, чтобы синхронизировать направление вращения и положение ротора с направлением вращения статора. В результате такой блокировки двигатель либо должен работать синхронно, либо не работать совсем.
Асинхронные двигатели
Принцип работы асинхронных двигателей почти такой же, как и у синхронных двигателей, за исключением того, что к ним не подключен внешний возбудитель. Проще говоря, асинхронные двигатели, также известные как асинхронные двигатели, также работают по принципу электромагнитной индукции, в которых ротор не получает никакой электроэнергии за счет теплопроводности, как в случае D.Двигатели C.
Единственная загвоздка здесь заключается в том, что в асинхронных двигателях нет внешнего устройства, подключенного для возбуждения ротора, и, следовательно, скорость ротора зависит от переменной магнитной индукции. Это изменяющееся электромагнитное поле заставляет ротор вращаться со скоростью, меньшей, чем скорость магнитного поля статора. Поскольку скорость ротора и скорость магнитного поля статора меняются, эти двигатели известны как асинхронные двигатели. Разница в скорости известна как «скольжение».
Синхронные и асинхронные двигатели — преимущества и недостатки
- Синхронный двигатель работает с постоянной скоростью при заданной частоте независимо от нагрузки.Но скорость асинхронного двигателя уменьшается с увеличением нагрузки.
- Синхронный двигатель может работать в широком диапазоне коэффициентов мощности, как с запаздыванием, так и с опережением, тогда как асинхронный двигатель всегда работает с запаздывающим коэффициентом мощности, который может быть очень низким при уменьшающихся нагрузках.
- Синхронный двигатель не запускается автоматически, тогда как асинхронный двигатель может запускаться самостоятельно.
- На крутящий момент синхронного двигателя не влияют изменения приложенного напряжения, как на асинхронный двигатель.
- Для запуска синхронного двигателя требуется внешнее возбуждение постоянного тока, но асинхронный двигатель не требует внешнего возбуждения для работы.
- Синхронные двигатели обычно дороги и сложны по сравнению с асинхронными двигателями, которые менее дороги и удобны для пользователя.
- Синхронные двигатели особенно хороши для низкоскоростных приводов (ниже 300 об / мин), потому что их коэффициент мощности всегда можно отрегулировать до 1,0, и они очень эффективны. С другой стороны, асинхронные двигатели отлично подходят для скоростей выше 600 об / мин.
- В отличие от асинхронных двигателей, синхронные двигатели могут работать на сверхнизких скоростях за счет использования мощных электронных преобразователей, которые генерируют очень низкие частоты. Их можно использовать для привода дробилок, вращающихся печей и шаровых мельниц с регулируемой скоростью.
Синхронные и асинхронные двигатели — Приложения
Приложения для синхронных двигателей
- Они обычно используются на электростанциях для достижения соответствующего коэффициента мощности. Они работают параллельно шинам и часто перегружаются извне для достижения желаемого коэффициента мощности.
- Они также используются в обрабатывающих отраслях, где используется большое количество асинхронных двигателей и трансформаторов для преодоления запаздывающей p.f.
- Используется на электростанциях для выработки электроэнергии с заданной частотой.
- Используется для управления напряжением путем изменения его возбуждения в линиях передачи.
Применение асинхронных двигателей
Более 90% двигателей, используемых в мире, являются асинхронными двигателями, и они находят широкое применение в самых разных областях.Вот некоторые из них:
- Центробежные вентиляторы, нагнетатели и насосы
- Компрессоры
- Конвейеры
- Лифты, а также краны большой грузоподъемности
- Токарные станки
- Масляные, текстильные и бумажные комбинаты и т.д.
Заключение
В заключение, синхронные двигатели используются только тогда, когда от машины требуются низкие или сверхнизкие скорости, а также при желаемых коэффициентах мощности (как отстающих, так и опережающих). В то время как асинхронные двигатели преимущественно используются в большинстве вращающихся или движущихся машин, таких как вентиляторы, подъемники, шлифовальные машины и т. Д.
Что вы думаете об этой статье? Вам это помогло?
.Что такое синхронный двигатель? — Определение, конструкция, работа и ее особенности
Определение: Двигатель, который работает с синхронной скоростью, известен как синхронный двигатель. Синхронная скорость — это постоянная скорость, с которой двигатель создает электродвижущую силу. Синхронный двигатель используется для преобразования электрической энергии в механическую.
Конструкция синхронного двигателя
Статор и ротор — две основные части синхронного двигателя.Статор становится неподвижным и несет обмотку якоря двигателя. Обмотка якоря является основной обмоткой, из-за которой в двигателе индуцируется ЭДС . Вращатель несет обмотки возбуждения. В роторе наводится основной поток поля. Ротор имеет две конструкции: ротор с явнополюсным ротором и ротор с невыпадающими полюсами.
В синхронном двигателе используется ротор с явнополюсным ротором. Слово выступ означает, что полюса ротора выступают в сторону обмоток якоря .Ротор синхронного двигателя выполнен из листовой стали. Пластины уменьшают потери на вихревые токи, возникающие в обмотке трансформатора. Ротор с явнополюсным ротором в основном используется для создания средне- и тихоходных двигателей. Для получения в двигателе используется высокоскоростной цилиндрический ротор.
Синхронный двигатель работает
Статор и ротор — две основные части синхронного двигателя. Статор — это неподвижная часть, а ротор — это вращающаяся часть машины.Трехфазное питание переменного тока подается на статор двигателя.
Статор и ротор возбуждаются отдельно. Возбуждение — это процесс создания магнитного поля на частях двигателя с помощью электрического тока.
Когда на статор подается трехфазное питание, между статором и зазором ротора возникает вращающееся магнитное поле. Поле, имеющее подвижную полярность, известно как вращающееся магнитное поле. Вращающееся магнитное поле возникает только в многофазной системе.Из-за вращающегося магнитного поля на статоре развиваются северный и южный полюса.
Ротор возбуждается источником постоянного тока. Источник постоянного тока наводит на ротор северный и южный полюса. Поскольку питание постоянного тока остается постоянным, магнитный поток на роторе остается неизменным. Таким образом, поток имеет фиксированную полярность. Северный полюс развивается на одном конце ротора, а южный — на другом.
Переменный ток синусоидальный. Полярность волны меняется каждые полупериод, т.е.е. волна остается положительной в первой половине цикла и становится отрицательной во второй половине цикла. Положительный и отрицательный полупериод волны развивает северный и южный полюсы статора соответственно.
Когда ротор и статор имеют одинаковые полюса на одной стороне, они отталкиваются друг от друга. Если у них противоположные полюса, они притягиваются друг к другу. Это легко понять с помощью рисунка, показанного ниже. 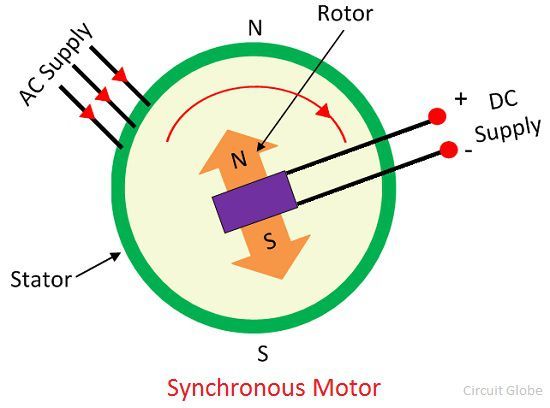 Ротор притягивается к полюсу статора в течение первой половины цикла питания и отталкивается во второй половине цикла.Таким образом, ротор начинает пульсировать только в одном месте. Это причина, по которой синхронный двигатель не запускается автоматически.
Ротор притягивается к полюсу статора в течение первой половины цикла питания и отталкивается во второй половине цикла.Таким образом, ротор начинает пульсировать только в одном месте. Это причина, по которой синхронный двигатель не запускается автоматически.
 Первичный двигатель используется для вращения двигателя. Первичный двигатель вращает ротор с синхронной скоростью. Синхронная скорость — это постоянная скорость машины, значение которой зависит от частоты и числа полюсов машины.
Первичный двигатель используется для вращения двигателя. Первичный двигатель вращает ротор с синхронной скоростью. Синхронная скорость — это постоянная скорость машины, значение которой зависит от частоты и числа полюсов машины.
Когда ротор начинает вращаться с синхронной скоростью, первичный двигатель отключается от двигателя.И питание постоянного тока подается на ротор, из-за чего северный и южный полюс развиваются на их концах
Северный и южный полюса ротора и статора взаимно блокируются. Таким образом, ротор начинает вращаться со скоростью вращающегося магнитного поля. И двигатель работает с синхронной скоростью. Скорость двигателя можно изменить только путем изменения частоты источника питания.
Основные характеристики синхронного двигателя
- Скорость синхронного двигателя не зависит от нагрузки, т.е.е. изменение нагрузки не влияет на скорость двигателя.
- Синхронный двигатель не запускается автоматически. Первичный двигатель используется для вращения двигателя с их синхронной скоростью.
- Синхронный двигатель работает как с опережающим, так и с запаздывающим коэффициентом мощности.
Синхронный двигатель также может быть запущен с помощью демпферных обмоток.
.Что такое синхронная машина? — Основные принципы
Синхронная машина состоит как из синхронных двигателей, так и из синхронных генераторов. Система переменного тока имеет некоторые преимущества перед системой постоянного тока. Таким образом, система переменного тока используется исключительно для производства, передачи и распределения электроэнергии. Машина, которая преобразует механическую энергию в электрическую энергию переменного тока, называется синхронным генератором или генератором переменного тока. Однако, если та же машина может работать как двигатель, это называется синхронным двигателем .
Синхронная машина — это машина переменного тока, удовлетворительная работа которой зависит от соблюдения следующих соотношений.
Где,
- N с — синхронная скорость в оборотах в минуту (об / мин)
- f — частота питания
- P — количество полюсов станка.
При подключении к системе электроснабжения синхронная машина всегда поддерживает указанное выше соотношение, показанное в уравнении (1).
Если синхронная машина, работающая как двигатель, не может поддерживать среднюю скорость (N s ), машина не будет развивать достаточный крутящий момент для поддержания своего вращения и остановится. Тогда говорят, что двигатель сбит с толку.
В случае, когда синхронная машина работает как генератор, она должна работать с фиксированной скоростью, называемой синхронной скоростью, чтобы генерировать мощность на определенной частоте. Поскольку все устройства или машины предназначены для работы на этой частоте.В некоторых странах значение частоты составляет 50 герц.
Основные принципы синхронной машины
Синхронная машина — это просто электромеханический преобразователь, который преобразует механическую энергию в электрическую или наоборот. Фундаментальное явление или закон, который делает эти преобразования возможными, известны как Закон электромагнитной индукции и Закон взаимодействия .
Подробное описание приводится ниже.
Закон электромагнитной индукции
Этот закон также называют первым законом электромагнитной индукции Фарадея.Этот закон касается производства ЭДС, т.е. ЭДС индуцируется в проводнике всякий раз, когда он пересекает магнитное поле, как показано ниже.
 Закон взаимодействия
Закон взаимодействия
Этот закон относится к созданию силы или крутящего момента, т. Е. Всякий раз, когда проводник с током помещается в магнитное поле, посредством взаимодействия магнитного поля, создаваемого проводником с током, и основным полем, сила действует на проводник. производящий крутящий момент. Рисунок показан ниже.
Трехфазная синхронная машина
- Машина, которая используется в бытовых приборах, например, небольшая машина, используемая в воздухоохладителях, холодильниках, вентиляторах, кондиционерах и т. Д.
- Однако большие машины переменного тока представляют собой синхронные машины трехфазного типа по следующим причинам.
- При одинаковом размере рамы трехфазные машины имеют мощность почти в 1,5 раза больше, чем однофазные.
- Трехфазная мощность передается и распределяется более экономично, чем однофазная мощность.
- Трехфазные двигатели самозапускающиеся (кроме синхронных двигателей).
- Трехфазные двигатели имеют абсолютно равномерный постоянный крутящий момент, тогда как однофазные двигатели имеют пульсирующий момент.
В малой синхронной машине обмотка возбуждения размещается на статоре, а обмотка якоря размещается на роторе, тогда как в большой синхронной машине обмотка возбуждения размещается на роторе, а обмотка якоря — на статоре. .
.