Как устроены асинхронные двигатели. Какие бывают виды асинхронных двигателей. Как работает асинхронный двигатель. Какие преимущества имеют асинхронные двигатели. Где применяются асинхронные электродвигатели.
Конструкция асинхронного двигателя: основные элементы
Асинхронный двигатель состоит из двух основных частей:
- Статор — неподвижная часть
- Ротор — вращающаяся часть
Статор представляет собой полый цилиндр, собранный из тонких листов электротехнической стали. На внутренней поверхности статора располагаются пазы, в которые укладывается трехфазная обмотка.
Ротор также имеет цилиндрическую форму и набирается из листов электротехнической стали. В пазах ротора размещается обмотка. По типу обмотки ротора различают два основных вида асинхронных двигателей:
- С короткозамкнутым ротором
- С фазным ротором
Особенности конструкции короткозамкнутого ротора
В асинхронном двигателе с короткозамкнутым ротором обмотка выполнена в виде так называемой «беличьей клетки». Она состоит из медных или алюминиевых стержней, расположенных в пазах сердечника ротора. Торцы стержней замкнуты накоротко токопроводящими кольцами.
Преимущества короткозамкнутого ротора:
- Простота конструкции
- Высокая надежность
- Низкая стоимость производства
Недостатки:
- Большой пусковой ток (до 7 раз больше номинального)
- Относительно небольшой пусковой момент
Конструктивные особенности фазного ротора
Асинхронный двигатель с фазным ротором имеет трехфазную обмотку, аналогичную обмотке статора. Концы обмотки выведены на контактные кольца, вращающиеся вместе с ротором. С помощью щеток, скользящих по кольцам, к обмотке ротора можно подключать пусковые и регулировочные реостаты.
Преимущества фазного ротора:
- Возможность ограничения пускового тока
- Увеличенный пусковой момент
- Возможность регулирования частоты вращения
Недостатки:
- Сложность конструкции
- Наличие щеточно-контактного узла
- Более высокая стоимость
Принцип действия асинхронного двигателя
Работа асинхронного двигателя основана на взаимодействии вращающегося магнитного поля статора с токами, индуцированными этим полем в обмотке ротора.
Основные этапы работы:
- При подключении трехфазного напряжения к обмоткам статора создается вращающееся магнитное поле.
- Магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС.
- Под действием ЭДС в обмотке ротора возникают токи.
- Взаимодействие токов ротора с магнитным полем статора создает вращающий момент.
- Под действием вращающего момента ротор начинает вращаться вслед за полем статора.
Скольжение асинхронного двигателя
Важной характеристикой асинхронного двигателя является скольжение. Скольжение — это отставание частоты вращения ротора от частоты вращения магнитного поля статора.

Скольжение выражается в процентах и рассчитывается по формуле:
S = ((n1 — n2) / n1) * 100%
Где:
- n1 — частота вращения магнитного поля статора
- n2 — частота вращения ротора
Для большинства асинхронных двигателей номинальное скольжение составляет 2-5%.
Преимущества асинхронных двигателей
Асинхронные двигатели получили широкое распространение благодаря ряду достоинств:
- Простота конструкции
- Высокая надежность
- Низкая стоимость
- Возможность работы непосредственно от сети переменного тока
- Хорошие пусковые и рабочие характеристики
- Высокий КПД (до 95% у мощных двигателей)
Области применения асинхронных электродвигателей
Благодаря своим преимуществам асинхронные двигатели нашли широкое применение в различных отраслях:
- Промышленные станки и механизмы
- Насосы, вентиляторы, компрессоры
- Подъемно-транспортное оборудование
- Бытовая техника
- Электротранспорт
- Сельскохозяйственные машины
Асинхронные двигатели составляют около 90% всех электродвигателей, используемых в промышленности и быту.
Регулирование частоты вращения асинхронных двигателей
Существует несколько способов регулирования скорости вращения асинхронных двигателей:
- Изменение частоты питающего напряжения с помощью преобразователей частоты
- Изменение числа пар полюсов обмотки статора
- Изменение величины питающего напряжения
- Введение дополнительных сопротивлений в цепь ротора (для двигателей с фазным ротором)
Наиболее эффективным и распространенным в настоящее время является частотное регулирование с помощью преобразователей частоты. Этот метод позволяет плавно и в широком диапазоне регулировать скорость вращения двигателя.
Техническое обслуживание асинхронных двигателей
Для обеспечения надежной работы асинхронных двигателей необходимо проводить регулярное техническое обслуживание:
- Проверка состояния подшипников
- Контроль уровня вибрации
- Очистка от пыли и грязи
- Проверка состояния изоляции обмоток
- Контроль температуры нагрева
- Замена смазки в подшипниках
Своевременное и качественное обслуживание позволяет значительно продлить срок службы двигателя и предотвратить аварийные ситуации.
Перспективы развития асинхронных двигателей
Несмотря на то, что конструкция асинхронных двигателей практически не менялась более 100 лет, они продолжают совершенствоваться:

- Применение новых магнитных и изоляционных материалов
- Оптимизация конструкции для повышения КПД
- Разработка специальных серий двигателей для работы с преобразователями частоты
- Создание интеллектуальных двигателей со встроенными датчиками и системами диагностики
Эти усовершенствования позволяют повысить энергоэффективность и расширить области применения асинхронных двигателей.
Двухфазный асинхронный двигатель. Назначение, устройство, принцип действия.
Назначение, устройство и принцип действия двухфазных асинхронных двигателей
В двухфазных асинхронных двигателях обе фазы обмотки статора с фазными зонами по 90 эл. град являются рабочими. Они расположены в пазах магнитопровода статора так, что их магнитные оси образуют угол 90 эл. град. Эти фазы обмотки статора отличаются друг от друга не только числом витков, но и номинальными напряжениями и токами, хотя при номинальном режиме двигателя полные мощности их одинаковы.
В одной из фаз обмотки статора постоянно находится конденсатор Ср (рисунок, позиция а), который в условиях номинального режима двигателя обеспечивает возбуждение кругового вращающегося магнитного поля. Емкость этого конденсатора определяют по формуле:
Cр = I1sinφ1 / 2πfUn2
где I1 и φ1- соответственно ток и сдвиг фаз между напряжением и током цепи фазы обмотки статора без конденсатора при круговом вращающемся магнитном поле, I и U — соответственно частота переменного тока и напряжение питающей сети, n- коэффициент трансформации — отношение эффективных чисел витков фаз обмотки статора соответственно с конденсатором и без него, определяемое по формуле
n = kоб2 w2 / kоб1 w1
где kоб2 и kоб1 — обмоточные коэффициенты соответствующих фаз обмотки статора с числом витков w2 и w1.
Напряжение на зажимах конденсатора Uc, включенного последовательно с фазой обмотки статора двухфазного асинхронного двигателя, при круговом вращающемся магнитном поле выше напряжения сети U и определяется так:
Uc = U √1 + n2
Переход к нагрузке двигателя, отличной от номинальной, сопровождается изменением вращающегося магнитного поля, которое вместо кругового становится эллиптическим. Это ухудшает рабочие свойства двигателя, а при пуске снижает начальный пусковой момент до Мп < 0,3Mном, ограничивая этим применение двигателей с постоянно включенным конденсатором только в установках с легкими условиями пуска.
Для повышения начального пускового момента параллельно рабочему конденсатору Ср включают пусковой конденсатор Сп (рисунок, позиция б), емкость которого намного больше емкости рабочего конденсатора и зависит от кратности начального пускового момента, которая может быть доведена до двух и более.
Схемы включения двухфазных асинхронных двигателей с короткозамкнутым ротором
а — с постоянно присоединенным конденсатором, б — с рабочим и пусковым конденсаторами
После разгона ротора до скорости 0,6 — 0,7 номинальной пусковой конденсатор отключают для избежания перехода кругового вращающегося магнитного поля в эллиптическое, ухудшающее рабочие характеристики двигателя.
Пусковой режим таких конденсаторных двигателей характеризуется такими показателями: kп = 1,7 — 2,4 и ki = 4 — 6.
Конденсаторные двигатели отличаются лучшими энергетическими показателями, чем однофазные асинхронные двигатели с пусковой фазой обмотки статора, а коэффициент мощности их, благодаря применению конденсаторов, выше, чем у трехфазных асинхронных двигателей одинаковой мощности.
Устройство и принцип работы трехфазных асинхронных двигателей | RuAut
Устройство трехфазных асинхронных двигателей (статор и ротор асинхронных двигателей)Трехфазный асинхронный двигатель состоит из неподвижного статора и ротора. Три обмотки размещены в пазах на внутренней стороне сердечника статора асинхронного двигателя. Обмотка же ротора асинхронного двигателя не имеет электрического соединения с сетью и с обмоткой статора. Начало и концы фаз обмоток статора присоединяют к зажимам в коробке выводов по схеме звезда или треугольник.
Асинхронные двигатели в основном различаются устройством ротора, который бывает двух типов: фазный или короткозамкнутый. Обмотка короткозамкнутого ротора асинхронного двигателя выполняется на цилиндре из медных стержней и называется «беличьей клеткой». Торцевые концы стержней замыкают металлическими кольцами. Пакет ротора набирают из электротехнической стали. В двигателях меньшей мощности стержни заливают алюминием. Фазный ротор и статор имеют трехфазную обмотку. Фазы обмотки соединяют звездой или треугольником и ее свободные концы выводят на изолированные контактные кольца.
Получение вращающегося магнитного поляОбмотка статора асинхронного двигателя в виде трех катушек уложена в пазы расположенные под углом в 120 градусов. Начало и конца катушек обозначаются соответственно буквами A, B, C и X,Y,Z. При подаче на катушки трехфазного напряжения в них установятся токи Ia, Ib, Ic и катушки создадут собственное переменное магнитное поле. Ток в любой катушке положительный, когда он направлен от начала к ее концу и отрицательный при обратном направлении. Векторы намагничивающей силы совпадают с осями катушек, а их величина определяется значениями токов, направление результирующего вектора совпадает с осью катушки. Вектор результирующей намагничивающей силы поворачивается на 120 градусов сохраняя величину совпадает с осью соответствующей катушки. Таким образом за период, результирующее магнитное поле статора совершает оборот с неизменной скоростью. Работа трехфазного асинхронного двигателя основана на взаимодействии вращающегося магнитного поля с токами наводимыми в проводниках ротора.
Совокупность моментов созданных отдельными проводниками образует результирующий вращающий момент двигателя, возникает электромагнитная пара сил, которая стремится повернуть ротор в направлении движения электромагнитного поля статора. Ротор приходит во вращение приобретает определенную скорость, магнитное поле и ротор вращаются с разными скоростями или асинхронно. Применительно к асинхронным двигателям, скорость вращения ротора всегда меньше скорости вращения магнитного поля статора.
Пуск асинхронных двигателейВ асинхронных двигателях с большим моментом инерции необходимо увеличение вращающего момента с одновременным ограничением пусковых токов — для этих целей применяют двигатели с фазным ротором. Для увеличения начального пускового момента в схему ротора включают трехфазный реостат. В начале пуска он введен полностью, пусковой ток при этом уменьшается. При работе реостат полностью выведен. Для пуска асинхронных двигателей с короткозамкнутым ротором применяют три схемы: с реактивной катушкой, с автотрансформатором и с переключением со звезды на треугольник. Рубильник последовательно соединяет реактивную катушку и статор двигателя. Когда скорость ротора приблизится к номинальной, замыкается рубильник, он закорачивает катушка и статор переключаются на полное напряжение сети. При автотрансформаторном пуске по мере разгона двигателя, автотрансформатор переводится в рабочее положение, в котором на статор подается полное напряжение сети. Пуск асинхронного двигателя с предварительным включением обмотки статора звездой и последующим переключением ее на треугольник дает трехкратное уменьшение тока.
Изменение частоты вращения ротора трехфазного асинхронного двигателяПараллельные обмотки двух фаз образуют одну пару полюсов сдвинутые в пространстве на 120 градусов. Последовательное соединение обмоток образует две пары полюсов, что дает возможность уменьшить скорость вращения в два раза. Для регулирования скорости вращения ротора изменением частоты тока используют отдельный источник тока или преобразователь энергии с регулируемой частотой выполненный на тиристорах.
Способы торможения двигателейПри торможении противовключением меняются два провода соединяющих трехфазную сеть с обмотками статора, изменяя при этом направление движения магнитного поля машины. При этом наступает режим электромагнитного тормоза. Для динамического торможения обмотка статора отключается от трехфазной сети и включается в сеть постоянного тока. Неподвижное поле статора заставляет ротор быстро останавливаться. Асинхронные двигатели нашли широкое применение в промышленности. В строительных механизмах, на металлообрабатывающих станках, в кузнечно-прессовом оборудовании, в силовых приводах прокатных станов, в радиолокационных станциях и многих других отраслях.
Устройство и принцип действия асинхронного двигателя. АЭ-92
Предмет: «Электрические машины»Тема: «Устройство и принцип действия асинхронного двигателя. АЭ-92»
Профессия: «Машинист электровоза»
Ярославское подразделение Северного УЦПК
1 | Преподаватели ОАО «РЖД» Коркина И.В. | 2018
Цель
Изучить
назначение,
устройство, принцип действия и
технические
характеристики
асинхронных
двигателей
компрессоров и вентиляторов.
2 | Преподаватели ОАО «РЖД» | 2018
План занятия
1.
2.
3.
4.
5.
Устройство асинхронного двигателя.
Вращающееся магнитное поле статора.
Назначение и устройство АЭ-92.
Принцип действия асинхронного двигателя.
Скольжение асинхронного двигателя.
3 | Преподаватели ОАО «РЖД» | 2018
Устройство асинхронного двигателя
Асинхронный двигатель состоит из статора и ротора.
Статор включает в себя корпус, подшипниковые щиты,
сердечник и обмотку.
Ротор включает в себя вал, сердечник и обмотку.
Сердечники и статора и ротора выполняются из листов
электротехнической стали. В зависимости от типа обмотки
ротор может быть фазным и короткозамкнутым.
4 | Преподаватели ОАО «РЖД» | 2018
Устройство асинхронного двигателя
Обмотка статора состоит из отдельных катушек,
объединенных в группы по числу фаз. В каждой фазе катушки
электрически соединены.
Начала и концы фаз выводятся к
шести зажимам для того, чтобы
можно было подключать обмотку
статора по схеме «звезда» или
«треугольник».
При
последовательном
согласном
соединении каждые три катушки
дают пару полюсов.
5 | Преподаватели ОАО «РЖД» | 2018
Устройство асинхронного двигателя
6 | Преподаватели ОАО «РЖД» | 2018
Устройство асинхронного двигателя
7 | Преподаватели ОАО «РЖД» | 2018
Устройство асинхронного двигателя
Обмотка короткозамкнутого ротора имеет вид беличьей
клетки. Она выполнена из медных или алюминиевых стержней,
замкнутых накоротко с торцов двумя кольцами. Стержни
обмотки вставляют в пазы сердечника ротора без изоляции, т.к.
напряжение в короткозамкнутой обмотке ротора равно нулю.
Достоинствами двигателей с короткозамкнутым ротором
являются простота конструкции и надежность в эксплуатации.
Недостатки – большой пусковой ток и сравнительно малый
пусковой момент.
8 | Преподаватели ОАО «РЖД» | 2018
Устройство асинхронного двигателя
а — беличья клетка, б — ротор с беличьей клеткой из стержней, в — ротор
с литой беличьей клеткой, 1 — короткозамыкающие кольца, 2 — стержни,
3 — вал, 4 — сердечник ротора, 5 — вентиляционные лопасти, 6 —
стержни литой клетки
9 | Преподаватели ОАО «РЖД» | 2018
Устройство асинхронного двигателя
Асинхронный двигатель с
короткозамкнутым
ротором:
1 – вал ротора;
2 – крышка подшипника;
3 – подшипник;
4 – подшипниковый щит;
5 – корпус;
6 – обмотка статора;
7 – сердечник статора;
8 – короткозамкнутый
ротор;
9 – вентилятор;
10 – кожух; 11 – коробка
выводов;
12 – выводы обмотки
статора;
13 – обмотка ротора.
10 | Преподаватели ОАО «РЖД» | 2018
Устройство асинхронного двигателя
Обмотка фазного ротора состоит из трех, шести, девяти т.д.
катушек (в зависимости от числа полюсов машины), сдвинутых одна
относительно другой на 120º (в двухполюсной машине), 60º (в
четырехполюсной) и т.д.
С одной стороны контакты проводников
фазного ротора соединяются вместе в
общую точку («звезда»), а противоположные
концы выводятся на контактные кольца, к
которым посредством щеток подключают
трехфазный реостат.
Достоинством двигателей с фазным ротором
является
большой
пусковой
момент.
Недостаток – сложность конструкции
11 | Преподаватели ОАО «РЖД» | 2018
Устройство асинхронного двигателя
Подключение внешнего сопротивления в обмотку ротора используется для
облегчения пуска двигателя и для контроля скорости двигателя. По мере
пуска добавочное сопротивление в обмотке ротора уменьшают. Это
происходит или плавно, или ступенчато, в зависимости от используемой
пусковой аппаратуры.
12 | Преподаватели ОАО «РЖД» | 2018
Устройство асинхронного двигателя
Асинхронный
двигатель
с
фазным
ротором:
1, 7 – подшипники; 2, 6 – подшипниковые щиты; 3 – корпус; 4сердечник статора с
обмоткой; 5 – ротор; 8 – вал; 9 – коробка выводов; 10 – лапы; 11 – контактные
кольца.
13 | Преподаватели ОАО «РЖД» | 2018
Устройство асинхронного двигателя
14 | Преподаватели ОАО «РЖД» | 2018
Вращающееся магнитное поле
Электрические машины переменного тока подразделяются на два
основных вида: асинхронные и синхронные. Принцип действия этих машин
основан на использовании вращающегося магнитного поля.
В двухполюсной машине переменного тока вращающееся поле
создается при питании трехфазным током трех катушек (фаз) оси которых,
сдвинуты одна относительно другой в пространстве на 120°.
15 | Преподаватели ОАО «РЖД» | 2018
Вращающееся магнитное поле
16 | Преподаватели ОАО «РЖД» | 2018
Вращающееся магнитное поле
Продолжая рассматривать процесс прохождения токов,
по катушкам обмотки статора, можно легко доказать, что в
течение одного периода изменения тока магнитный поток
машины, а следовательно, и находящийся в ее поле магнит
повернутся на один оборот.
Т.о., при питании трехфазным током трех катушек,
сдвинутых одна относительно другой на угол 120°, возникает
магнитное поле, вращающееся в пространстве с постоянной
частотой вращения.
17 | Преподаватели ОАО «РЖД» | 2018
Назначение и устройство АЭ-92
Асинхронный двигатель АЭ92-4/02.
А – асинхронный;
Э – электровозный;
9 – диаметр сердечника статора 900 мм;
2 – длина сердечника статора 200 мм;
4 – число полюсов рабочих обмоток.
Асинхронный
трёхфазный
электродвигатель
с
короткозамкнутым ротором служит приводом главных
компрессоров и центробежных вентиляторов электровозов
переменного тока.
18 | Преподаватели ОАО «РЖД» | 2018
Назначение и устройство АЭ-92
Техническая характеристика:
Напряжение линейное
В
380
Ток фазный
А
90
Мощность
кВА
40
Гц
50
об/мин
1425
КПД
—
0,855
Масса
кг
390 – 400
Частота тока
Частота вращения ротора
19 | Преподаватели ОАО «РЖД» | 2018
Назначение и устройство АЭ-92
Состоит из стальной сварной станины образованной
из двух торцовых колец приваренных к продольным рёбрам и
обшивки. В станине закреплён сердечник статора состоящий
из шихтованных листов электротехнической стали, в пазах
которой уложена обмотка.
Обмотка статора состоит из жёстких пропитанных
катушек (медь прямоугольного сечения) которая в пазах
статора закреплены клиньями. Изоляция обмотки применена
класса Н, 6 выводов обмотки статора начало и конец
закреплены в коробке выводов, расположенной на станине
( две пары полюсов). Вывода соединены по схеме звезда.
20 | Преподаватели ОАО «РЖД» | 2018
Назначение и устройство АЭ-92
Ротор состоит из шихтованного сердечника так же набранного
из листов электротехнической стали. Пазы сердечника залиты
алюминиевым сплавом который образует короткозамкнутую
обмотку в виде «беличьего» колеса. В сердечнике ротора
имеются осевые вентиляционные каналы. Ротор вместе с валом
вращается в подшипниках установленных в капсулах
подшипниковых щитов.
Подшипниковые щиты крепят болтами к торцовым кольцам.
Подшипники закрывают крышками для защиты от пыли и
грязи. Подшипниковые щиты стальные, сварные, имеют
вентиляционные окна с сетками. К щиту крепятся 2
лабиринтные крышки (внутренняя и наружная) которые в
системе образуют капсулу для подшипников. В капсулу
заправляют смазку.
21 | Преподаватели ОАО «РЖД» | 2018
Назначение и устройство АЭ-92
Внутри двигатель снабжён вентилятором. Вентилятор
центробежный, с радиальными лопатками и направляющим
диском, обтекаемой формы отлит из алюминиевого сплава.
Вентилятор засасывает воздух с противоположной стороны
через окна и отверстия в подшипниковом щите. Поступающий
воздух охлаждает лобные части обмоток статора, после чего
выбрасывается наружу через окна в подшипниковом щите.
22 | Преподаватели ОАО «РЖД» | 2018
Назначение и устройство АЭ-92
23 | Преподаватели ОАО «РЖД» | 2018
Принцип действия асинхронного двигателя
U→ВМП→ЭДС в обм. ротора→iрот.→Fэл.магн.→М→
→ ротор вращается в ту же сторону, что и МП статора
Частота вращения магнитного поля статора обозначается – n1, и
определяется по формуле:
60 f
n1
P
где: f – частота питающего тока
P – число пар полюсов
60 – коэффициент перевода единиц измерения из об/сек в
об/мин
24 | Преподаватели ОАО «РЖД» | 2018
Принцип действия асинхронного двигателя
Колтво
стат.
обм.
3
Кол-во
пар
полюсо
в (Р)
1
Подсчет Значение
n1
по n1
формуле ( об/мин)
Примечание
60×50/1
3000
2
60×50/2
1500
3
60×50/3
1000
3 обмотки по кругу занимают пространство
3600, поэтому за один период изменения
тока магнитное поле повернется на 3600.
3 обмотки из 6 по кругу занимают
пространство 1800, поэтому за один период
изменения тока магнитное поле повернется
на1800.
3 обмотки из 9 по кругу занимают
пространство 1200, поэтому за один период
изменения тока магнитное поле повернется
на1200.
6
9
Каждые 3 обмотки у асинхронного двигателя приравнивается к одной паре полюсов
25 | Преподаватели ОАО «РЖД» | 2018
Скольжение асинхронного двигателя
Частота
вращения
ротора
обозначается
–
n2
Для того, чтобы на валу ротора создавался вращающий момент,
необходимо
выполнение
данного
условия:
n2‹n1
Поэтому такие двигатели называются асинхронными. Приставка
«а» означает «не», то есть несинхронные двигатели.
Отставание ротора от магнитного поля статора характеризуется
скольжением (S). Скольжение определяется по данной
формуле:
.
n1 n2
S
100%
n1
26 | Преподаватели ОАО «РЖД» | 2018
Скольжение асинхронного двигателя
Скольжение показывает, на сколько процентов частота вращения
ротора меньше частоты вращения магнитного поля статорных
обмоток. Значение n2 при определенном скольжении для
различных асинхронных двигателей приведены в таблице:
Количест Количество
во
пар полюсов
статорных (Р)
обмоток
3
1
6
2
9
3
27 | Преподаватели ОАО «РЖД» | 2018
n1 (об/мин) S (%)
3000
1500
1000
n2 (об/мин)
4
4
4
2880
1440
960
Домашнее задание
1. А.В. Грищенко «Электрические машины и преобразователи
подвижного состава», стр. 215-220.
2. А.А. Дайлидко «Электрические машины тягового
подвижного состава », стр. 119-141, 143-146.
3. Работа с конспектом.
4. Подготовка к опросу по пройденному материалу.
28 | Преподаватели ОАО «РЖД» | 2018
Спасибо за внимание
Желаю успехов!
29
| преподаватели ОАО «РЖД» | 2018
Устройство и принцип действия асинхронных двигателей
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА
Электрическими машинами переменного тока называются машины, в которых применяется переменный ток. С помощью системы переменных токов, которые протекают в обмотках, в электрических машинах переменного тока образуется магнитное поле, которое вращается.
По принципу действия электрические машины переменного тока подразделяются на:
Асинхронные машины, в которых скорость вращения ротора отличается от скорости вращения магнитного поля;
синхронные машины, в которых скорость вращения ротора одинакова со скоростью вращения магнитного поля.
По назначению електрические машины переменного тока -это:
электрические генераторы;
электрические двигатели.
На практике широко применяют как синхронные генераторы, так и синхронные двигатели, в то время как асинхронные машини используют в основном как асинхронные двигатели.
Применение асинхронных двигателей. Асинхронный двигатель имеет такие позитивные качества, как несложная технология изготовления, простота в експлуатации, високая надежность и способность перегрузок, отсутствие искрения. Благодаря этим качествам асинхронный двигатель нашел широкое применение в промышленности для привода станков и мекханизмов, а также в сельхоз машинах. Но управление частотой вращения асинхронного двигателя в широком диапазоне значительно сложнее, чем, например, в двигателе постоянного тока. Это ограничивает применение асинхронного двигателя в тех случаях, когда необходимо изменять частоту вращения в широких пределах по заданному закону, например, в разных устройствах автоматики. Но с появлением мощных полупроводниковых транзисторов и тиристоров, параметры которых постоянно улучшаются, расширяется применение асинхронних двигателей с частотным управлением скорости вращения. Асинхронные двигатели постепенно вытесняют двигатели постоянного тока, особенно в тех случаях, где искрение недопустимо, например в нефтяной, газовой, химической промышленности.
Устройство и принцип действия асинхронных двигателей
Асинхронный двигатель состоит из двух основных частей: неподвижного статора и подвижного ротора, которые разделены воздушным зазором.
По конструкции ротора двигатели подразделяютсяся на два основных типа: с короткозамкнутым и фазным ротором. Оба типа имеют одинаковую конструкцию статора.
Конструкция асинхронного двигателя з короткозамкнутым ротором приведена на рис.1. В корпусе І, выполненном в виде стальной вальцованой трубы или алюминиевой отливки с внешними ребрами, вставлен магнитопровод статора 2, который набирается из листов електротехнической стали толщиной 0,5 — 0,35 мм, изолированных друг от друга лаком. В пазы магнитопровода (рис. 2, а), выполненные во
время штампования листов, вставляется
обмотка статора З, которая образуется из трех фазных обмоток: С1 — С4 (фаза А), С2 — С5 (фаза Б), С3 — Сб (фаза С).
Рис. 1
Начала С1, С2, С3 і кінці С4,С5,С6 фазних обмоток выведены в клемную коробку 4, закрепленную на корпусе. Фазные обмотки статора соединяются звездой или треугольником (рис.2).
Ротор (рис. 1) имеет магнитопровод 5, набранный из листов електротехнической стали толщиной 0,5-0,35 мм с выштампованными в них пазами, в которых размещены стержни 6короткозамкнутой обмотки ротора. Стержни на концах жестко соединены между собой торцевыми кольцами 7. как правило, обмотка ротора выполняется из алюминия, его заливают в расплавленном виде в пазы сердечника с одновременной отливкой торцевых колец с вентиляционными лопатками 8. Магнитопровод ротора с обмоткой крепится на валу 9и вставляется в подшипниках 10 и 11, размещенных в подшипниковых щитах 12 и 13. Для охлаждения двигателя используется вентилятор 14, закрытый кожухом 15. Изготовления обмотки ротора методом заливки дает возможность виполнить стержни ротора практически любой необходимой формы для асинхронных двигателей мощностью до нескольких сотен киловатт (рис. 3).
Асинхронный двигатель с фазным ротором отличается от асинхронного двигателя с короткозамкнутым ротором только конструкцией самого ротора. Фазный ротор имеет трехфазную обмотку, которая выполняется аналогично обмотке статора з тем же количеством полюсов. Обмотку ротора соединяют по схеме звезды, три конца которой выводят на три контактных кольца, жестко закрепленных на валу ротора (рис. 4). При помощи металографитных щеток, которые скользят по контактним кольцам, к ротору присоединяется пусковой или пускорегулировочный реостат Кп, то есть в каждую обмотку ротора вмыкаєтся дополнительное фазное сопротивление.
Трехфазные двигатели малой и средней мощности изготавливают на два номинальных напряжения: 220/127, 380/220, 600/380 В, отношение между которыми составляет √3. При линейных напряжениях, стоящих в числителе, фазніые обмотки статора соединяют звездой, а если эти напряжения соответствуют знаменателю треугольником. В обоих случаях напряжение на фазной обмотке и токи в ней будут одинаковыми.
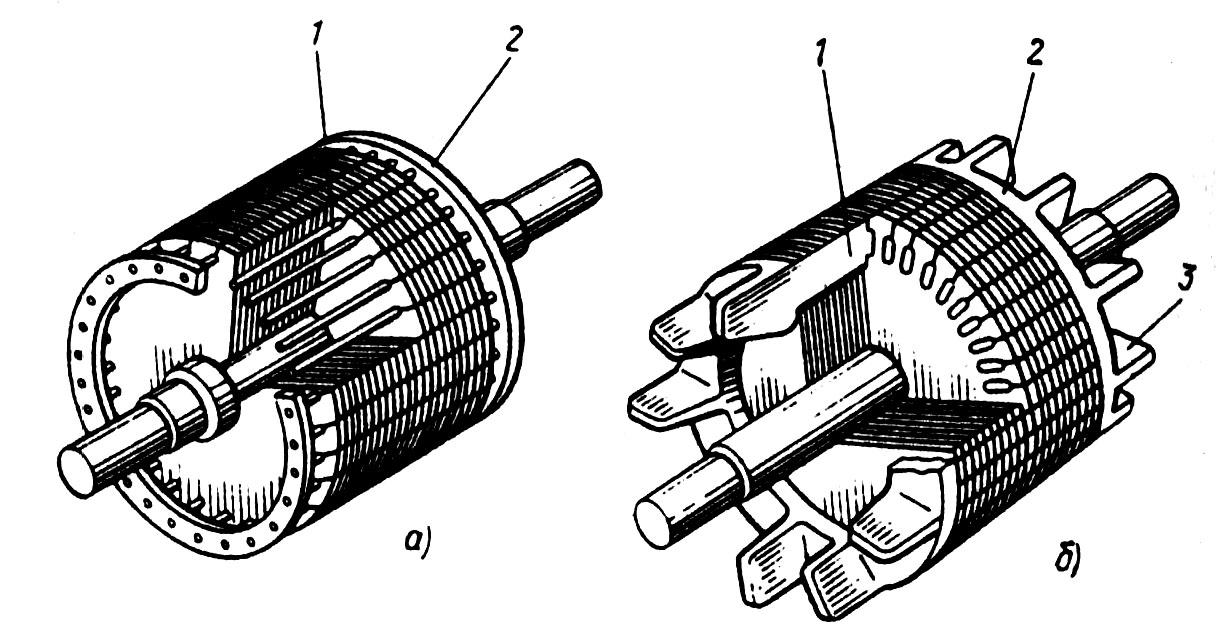
а — короткозамкнутый ротор
б — форма пазов ротора
Рис. 3
Принцип действия асинхронного двигателя основан на создании вращающегося магнитного поля токами (как правило, трехфазными), сдвинутыми во времени один относительно другого, которые проходят в обмотках статора (рис. 8.2, а), смещенных одна относительно другой в пространстве . Вращаясь в пространстве, основное магнитное поле наводит ЭДС в проводниках обмотки статора и ротора. ЭДС, наведенная в обмотках статора, направлена таким образом, что компенсирует приложенное напряжение сети и ограничивает ток. Под действием ЭДС, наведенной в обмотках ротора, в проводниках этой обмотки проходит ток. Проводники ротора с током находятся во вращающемся основном магнитном поле и на них действует сила Ампера. Суммарный момент сил Ампера всех проводников приводит ротор в движение, преодолевая момент нагрузки. В асинхронных двигателях ротор вращается с меньшей скоростью, чем основное магнитное поле.
Асинхронность движения ротора и поля является принципиальным отличием асинхронныхим двигателей.
а — ротор с фазной обмоткой
б — смена сопротивления фазной обмотки ротора с помощьюю регулировочного реостата
Рис. 4
вставляется обмотка статора З, которая образуется из трех фазных обмоток: С1 — С4 (фаза А), С2 — С5 (фаза Б), С3 — Сб (фаза С). Начала С1, С2, С3 і кінці С4,С5,С6 фазних обмоток виведены в клемную коробку 4, закрепленную на корпусе. Фазные обмотки статора соединяются звездой или треугольником (рис. 8.2).
Ротор (рис. 8.1) имеет магнитопровод 5, набранный из листов електротехнической стали товщиною 0,5-0,35 мм с выштампованными в них пазами, в которых размещены стержни 6короткозамкнутой обмотки ротора. Стержни на концах жестко соединены между собой торцевыми кольцами 7. как правило, обмотка ротора выполняется из алюминия, его заливают в расплавленном виде в пазы сердечника с одновременной отливкой торцевых колец с вентиляционными лопатками 8. Магнитопровод ротора с обмоткой крепится на валу 9и вставляется в подшипниках 10 и 11, размещенных в подшипниковых щитах 12 и 13. Для охлаждения двигателя используется вентилятор 14, закрытый кожухом 15. Изготовления обмотки ротора методом заливки дает возможность виполнить стержни ротора практически любой необходимой формы для асинхронных двигателей мощностью до нескольких сотен киловатт (рис. 8.3).
Асинхронный двигатель с фазным ротором отличается от асинхронного двигателя с короткозамкнутым ротором только конструкцией самого ротора. Фазный ротор имеет трехфазную обмотку, которая выполняется аналогично обмотке статора з тем же количеством полюсов. Обмотку ротора соединяют по схеме звезды, три конца которой выводят на три контактных кольца, жестко закрепленных на валу ротора (рис. 8.4). При помощи металографитных щеток, которые скользят по контактним кольцам, к ротору присоединяется пусковой или пускорегулировочный реостат Кп, то есть в каждую обмотку ротора вмыкаєтся дополнительное фазное сопротивление.
Трехфазные двигатели малой и средней мощности изготавливают на два номинальных напряжения: 220/127, 380/220, 600/380 В, отношение между которыми составляет √3. При линейных напряжениях, стоящих в числителе, фазніые обмотки статора соединяют звездой, а если эти напряжения соответствуют знаменателю треугольником. В обоих случаях напряжение на фазной обмотке и токи в ней будут одинаковыми.
а — короткозамкнутый ротор
б — форма пазов ротора
Рис. 8.3
а — ротор с фазной обмоткой
б — смена сопротивления фазной обмотки ротора с помощьюю регулировочного реостата
Рис. 8.4
Принцип дії асинхронного двигуна ґрунтується на утворенні обертового магнітного поля струмами (як правило, трифазними), зсунутими у часі один відносно одного, що проходять в обмотках статора (рис. 8.2, а), зміщених одна відносно одної у просторі. Обертаючись у просторі, основне магнітне поле наводить ЕРС у провідниках обмотки статора і ротора. ЕРС, наведена в обмотках статора, спрямована таким чином, що компенсує прикладену напругу мережі і обмежує струм. Під дією ЕРС, наведеної в обмотках ротора, у провідниках цієї обмотки проходить струм. Провідники ротора зі струмом знаходяться в обертовому основному магнітному полі і на них діє сила Ампера. Сумарний момент сил Р Ампера всіх провідників приводить ротор у рух, долаючи момент навантаження. В асинхронних двигунах ротор обертається з меншою швидкістю, ніж основне магнітне поле.
Асинхронність руху ротора і поля є принциповою ознакою, притаманною асинхронним двигунам. Довести це можна від супротивного. Припустимо, що ротор обертається синхронно, тобто має однакову швидкість з магнітним полем. Тоді магнітне поле відносно ротора нерухоме, і тому в провідниках ротора не наводиться електрорушійних сил. Струми у провідниках ротора не проходять, оскільки причина їх виникнення — електрорушійна сила. Електромагнітний момент, зумовлений силами Ампера, також дорівнює нулю. Під дією сил тертя і моменту навантаження ротор гальмується, виходить’ від синхронізму і відстає від магнітного поля. Отже, якщо навіть припустити, що ротор знаходиться у стані синхронізму, то виявляється, що цей стан нестійкий і ротор обов’язково переходить у стійкий стан асинхронізму. Характеристикою асинхронного режиму є ковзання. Ковзанням називають відносну різницю між кутовою швидкістю магнітного поля Йх та кутовою швидкістю ротора О.2 і позначають літерою з:
Устройство и принцип действия асинхронных электродвигателей
Всем привет. Рад вас видеть у себя на сайте. Тема сегодняшней статьи: устройство и принцип действия асинхронных электродвигателей. Так же я бы хотел немного сказать о способах регулировки их частоты вращения, и перечислить их основные преимущества и недостатки.
Раньше, я уже писал статьи, касающиеся асинхронных электродвигателей. Если кому интересно, то можете почитать. Вот список:
Схема пуска асинхронного двигателя.
Расчёт тока электродвигателя.
Реверсивное управление асинхронным электродвигателем с короткозамкнутым ротором.
Ну а теперь давайте перейдём к теме сегодняшней статьи.
В нынешнее время, очень трудно представить, как бы существовали все промышленные предприятия, если бы не было асинхронных машин. Эти двигателя установлены практически везде. Даже дома у каждого человека есть такой двигатель. Он может стоять на вашей стиральной машинке, на вентиляторе, на насосной станции, в вытяжке и так далее.
Вообще асинхронный электродвигатель – это колоссальный прорыв в мировой промышленности. Во всём мире их выпускают более 90 процентов от количества всех выпускаемых двигателей.
Асинхронный электродвигатель – это электрическая машина, которая преобразовывает электрическую энергию в механическую. То есть потребляет электрический ток, а взамен дают крутящий момент, с помощью которого можно вращать многие агрегаты.
А само слово «асинхронный» — означает неодновременных или не совпадающий по времени. Потому что у таких двигателей частота вращения ротора немного отстаёт от частоты вращения электромагнитного поля статора. Ещё это отставанием называют – скольжением.
Обозначается это скольжение буквой: S
А вычисляется скольжение по такой формуле: S = ( n1 — n2 )/ n1 — 100%
Где, n1 – это синхронная частота магнитного поля статора;
n2 – это частота вращения вала.
Устройство асинхронного электродвигателя.
Двигатель состоит из таких частей:
1. Статор с обмотками. Или станина внутри которой находится статор с обмотками.
2. Ротор. Это если короткозамкнутый. А если фазный, то можно сказать, что это якорь или даже коллектор. Я думаю, ошибки не будет.
3. Подшипниковые щиты. На мощных двигателях ещё спереди стоят подшипниковые крышки с уплотнителями.
4. Подшипники. Могут стоять скольжения или качения, в зависимости от исполнения.
5. Вентилятор охлаждения. Изготавливается из пластмассы или металла.
6. Кожух вентилятора. Имеет прорези для подачи воздуха.
7. Борно или клеммная коробка. Для подключения кабелей.
Это все его основные детали, но в зависимости от вида, типа и исполнения может немного изменяться.
Асинхронные электродвигателя в основном выпускают двух видов: трёхфазные и однофазные. В свою очередь трёхфазные ещё подразделяются на подвиды: с короткозамкнутым ротором или фазным ротором.
Самые распространённые – это трёхфазные с короткозамкнутым ротор.
Статор имеет круглую форму и набирается с листов специальной стали, которые изолированы между собой, и эта собранная конструкция образует сердечник с пазами. В пазы сердечника укладываются обмотки, со специального обмоточного, изолированного лаком провода. Провод это отливают в основном из меди, но также есть и с алюминия. Если двигатель очень мощный, то обмотки делаю шиной. Обмотки укладывают так, чтобы они были сдвинуты относительно друг друга на 120 градусов. Соединяются обмотки статора в звезду или в треугольник.
Ротор, как выше я уже писал выше, бывает короткозамкнутый или фазный.
Короткозамкнутый представляет собой вал, на который надеваются листы, из тоже специальной, стали. Эти наборные листы образую сердечник, в пазы которого заливают расплавленный алюминий. Этот алюминий равномерно растекается по пазам и образует стержни. А по краям эти стержни замыкают алюминиевыми кольцами. Получается своего рода «беличья клетка».
Фазный ротор представляет собой вал с сердечником и тремя обмотками. Одни концы, которых обычно соединяют в звезду, а вторые три конца присоединяют к токосъемным кольцам. А на эти кольца, с помощью щёток подают электрический ток.
Если в цепь фазных обмоток добавить нагрузочный реостат, и при пуске двигателя увеличивать активное сопротивление, то таким способ можно уменьшить большие пусковые токи.
Принцип действия.
Когда на обмотки статора подаются электрический ток, то в этих обмотках возникает электрический поток. Как вы помните, из выше написанных слов, фазы у нас смещены относительно друг друга на 120 градусов. И вот этот поток в обмотках начинает вращаться.
И при вращении магнитного потока статора, в обмотках ротора появляется электрический ток, и своё магнитное поле. Два этих магнитных поля начинают взаимодействовать и заставляют вращаться ротор электродвигателя. Это если ротор короткозамкнутый.
По принципу роботы вот посмотрите видео ролик.
Ну а с фазным ротором, по сути, принцип тот же. Напряжение подаётся на статор и на ротор. Появляются два магнитных поля, которые начинают взаимодействовать и вращать ротор.
Достоинства и недостатки асинхронных двигателей.
Основные достоинства асинхронного электродвигателя с короткозамкнутым ротором:
1. Очень простое устройство, что позволяет сократить затраты на его изготовление.
2. Цена намного меньше по сравнению с другими двигателями.
3. Очень простая схема запуска.
4. Скорость вращения вала практически не меняется с увеличением нагрузки.
5. Хорошо переносит кратковременные перегрузы.
6. Возможность подключения трёхфазных двигателей в однофазную сеть.
7. Надёжность и возможность эксплуатировать практически в любых условиях.
8. Имеет очень высокий показатель КПД и cos φ.
Недостатки:
1. Не возможности контролировать частоту вращения ротора без потери мощности.
2. Если увеличить нагрузку, то уменьшается момент.
3. Пусковой момент очень мал по сравнению с другими машинами.
4. При недогрузе увеличивается показатель cos φ
5. Высокие показатели пусковых токов.
Достоинства двигателей с фазным ротором:
1. По сравнению с короткозамкнутыми двигателями, имеет достаточно большой вращающий момент. Что позволяет его запускать под нагрузкой.
2. Может работать с небольшим перегрузом, и при этом частота вращения вала практически не меняется.
3. Небольшой пусковой ток.
4. Можно применять автоматические пусковые устройства.
Недостатки:
1. Большие габариты.
2. Показатели КПД и cos φ меньше, чем у двигателей с короткозамкнутым ротором. И при недогрузе эти показатели имеют минимальное значение
3. Нужно обслуживать щёточный механизм.
На этом буду заканчивать свою статью. Если она была вам полезной, то поделитесь нею со своими друзьями в социальных сетях. Если есть вопросы, то задавайте их в комментариях и подписывайтесь на обновления. Пока.
С уважением Александр!
Читайте также статьи:
Асинхронный электродвигатель с короткозамкнутым и фазным ротором: устройство и принцип действия
Наука в области электричества в XIX и XX веках стремительно развивалась, что привело к созданию электрических асинхронных двигателей. С помощью таких устройств развитие промышленной индустрии шагнуло далеко вперед и теперь невозможно представить заводы и фабрики без силовых машин с использованием асинхронных электродвигателей.
История появления
История создания асинхронного электродвигателя начинается в 1888 году, когда Никола Тесла запатентовал схему электродвигателя, в этом же году другой ученый в области электротехники Галлилео Феррарис опубликовал статью о теоретических аспектах работы асинхронной машины.
В 1889 году российский физик Михаил Осипович Доливо-Добровольский получил в Германии патент на асинхронный трехфазный электрический двигатель.
Все эти изобретения позволили усовершенствовать электрические машины и привели к тому, что в промышленность стали массово применяться электрические машины, которые значительно ускорили все технологические процессы на производстве, повысили эффективность работы и снизили её трудоемкость.
В настоящий момент самый распространенный электродвигатель, эксплуатируемый в промышленности, является прототипом электрической машины, созданной Доливо-Добровольским.
Устройство и принцип действия асинхронного двигателя
Главными компонентами асинхронного электродвигателя являются статор и ротор, которые отделены друг от друга воздушным зазором. Активную работу в двигателе выполняют обмотки и сердечник ротора.
Под асинхронностью двигателя понимают отличие частоты вращения ротора от частоты вращения электромагнитного поля.
Статор – это неподвижная часть двигателя, сердечник которой выполняется из электротехнической стали и монтируется в станину. Станина выполняется литым способом из материала, который не магнитится (чугун, алюминий). Обмотки статора являются трехфазной системой, в которой провода уложены в пазы с углом отклонения 120 градусов. Фазы обмоток стандартно подключают к сети по схемам «звезда» или «треугольник».
Ротор – это подвижная часть двигателя. Роторы асинхронных электродвигателей бывают двух видов: с короткозамкнутым и фазным роторами. Данные виды отличаются между собой конструкциями обмотки ротора.
Асинхронный двигатель с короткозамкнутым ротором
Такой тип электрической машины был впервые запатентован М.О. Доливо-Добровольским и в народе называется «беличье колесо» из-за внешнего вида конструкции. Короткозамкнутая обмотка ротора состоит из накоротко замкнутых с помощью колец стержней из меди (алюминия, латуни) и вставленные в пазы обмотки сердечника ротора. Такой тип ротора не имеет подвижных контактов, поэтому такие двигатели очень надежны и долговечны при эксплуатации.
Асинхронный двигатель с фазным ротором
Такое устройство позволяет регулировать скорость работы в широком диапазоне. Фазный ротор представляет собой трехфазную обмотку, которая соединяется по схемам «звезда» или треугольник. В таких электродвигателях в конструкции имеются специальные щетки, с помощью которых можно регулировать скорость движения ротора. Если в механизм такого двигателя добавить специальный реостат, то при пуске двигателя уменьшится активное сопротивление и тем самым уменьшатся пусковые токи, которые пагубно влияют на электрическую сеть и само устройство.
Принцип действия
При подаче электрического тока на обмотки статора возникает магнитный поток. Так как фазы смещены относительно друг друга на 120 градусов, то из-за этого поток в обмотках вращается. Если ротор короткозамкнутый, то при таком вращении в роторе появляется ток, который создает электромагнитное поле. Взаимодействуя друг с другом, магнитные поля ротора и статора заставляют ротор электродвигателя вращаться. В случае, если ротор фазный, то напряжение подается на статор и ротор одновременно, в каждом механизме появляется магнитное поле, они взаимодействуют друг с другом и вращают ротор.
Достоинства асинхронных электродвигателей
| С короткозамкнутым ротором | С фазным ротором |
|---|---|
| 1. Простое устройство и схема запуска | 1. Небольшой пусковой ток |
| 2. Низкая цена изготовления | 2. Возможность регулировать скорость вращения |
| 3. С увеличением нагрузки скорость вала не меняется | 3. Работа с небольшими перегрузками без изменения частоты вращения |
| 4. Способен переносить перегрузки краткие по времени | 4. Можно применять автоматический пуск |
| 5. Надежен и долговечен в эксплуатации | 5. Имеет большой вращающий момент |
| 6. Подходит для любых условий работы | |
| 7. Имеет высокий коэффициент полезного действия |
Недостатки асинхронных электродвигателей
| С короткозамкнутым ротором | С фазным ротором |
|---|---|
| 1. Не регулируется скорость вращения ротора | 1. Большие габариты |
| 2. Маленький пусковой момент | 2. Коэффициент полезного действия ниже |
| 3. Высокий пусковой ток | 3. Частое обслуживание из-за износа щеток |
| 4. Некоторая сложность конструкции и наличие движущихся контактов |
Асинхронные электродвигатели являются очень эффективными устройствами с отличными механическими характеристиками, и благодаря этому они являются лидерами по частоте применения.
Режимы работы
Электродвигатель асинхронного типа универсальный механизм и по продолжительности работы имеет несколько режимов:
- Продолжительный;
- Кратковременный;
- Периодический;
- Повторно-кратковременный;
- Особый.
Продолжительный режим — основной режим работы асинхронных устройств, который характеризуется постоянной работой электродвигателя без отключений с неизменной нагрузкой. Такой режим работы самый распространенный, используется на промышленных предприятиях повсеместно.
Кратковременный режим – работает до достижения постоянной нагрузки определенное время (от 10 до 90 минут), не успевая максимально разогреться. После этого отключается. Такой режим используют при подаче рабочих веществ (воду, нефть, газ) и прочих ситуациях.
Периодический режим – продолжительность работы имеет определенное значение и по завершении цикла работ отключается. Режим работы пуск-работа-остановка. При этом он может отключаться на время, за которое не успевает остыть до внешних температур и включаться заново.
Повторно-кратковременный режим – двигатель не нагревается максимально, но и не успевает остыть до внешней температуры. Применяется в лифтах, эскалаторах и прочих устройствах.
Особый режим – продолжительность и период включения произвольный.
В электротехнике существует принцип обратимости электрических машин — это означает, что устройство может, как преобразовывать электрическую энергию в механическую, так и совершать обратные действия.
Асинхронные электродвигатели тоже соответствуют этому принципу и имеют двигательный и генераторный режим работы.
Двигательный режим – основной режим работы асинхронного электродвигателя. При подаче напряжения на обмотки возникает электромагнитный вращающий момент, увлекающий за собой ротор с валом и, таким образом, вал начинает вращаться, двигатель выходит на постоянную частоту вращения, совершая полезную работу.
Генераторный режим – основан на принципе возбуждения электрического тока в обмотках двигателя при вращении ротора. Если вращать ротор двигателя механическим способом, то на обмотках статора образуется электродвижущая сила, при наличии конденсатора в обмотках возникает емкостный ток. Если емкость конденсатора будет определенного значения, зависящего от характеристик двигателя, то произойдет самовозбуждение генератора и возникнет трехфазная система напряжений. Таким образом короткозамкнутый электродвигатель будет работать как генератор.
Регулирование частоты вращения асинхронных двигателей
Для регулирования частоты вращения асинхронных электродвигателей и управления режимами их работы существуют следующие способы:
- Частотный – при изменении частоты тока в электрической сети изменяется частота вращения электрического двигателя. Для такого способа применяют устройство, которое называется частотный преобразователь;
- Реостатный – при изменении сопротивления реостата в роторе, изменяется частота вращения. Такой способ увеличивает пусковой момент и критическое скольжение;
- Импульсный – способ управления, при котором на двигатель подается напряжение специального вида.
- Переключение обмоток по время работы электрического двигателя со схемы «звезда» на схему «треугольник», что снижает пусковые токи;
- Управление с изменения пар полюсов для короткозамкнутых роторов;
- Подключение индуктивного сопротивления для двигателей с фазным ротором.
С развитием электронных систем, управление различными электродвигателями асинхронного типа становится все более эффективным и точным. Такие двигатели используются в мире повсеместно, разнообразие задач, выполняемых такими механизмами, с каждым днем растет, и потребность в них не уменьшается.
На чем основан принцип действия асинхронного двигателя
На чем основан принцип действия асинхронного электродвигателя?
В основе принципа действия асинхронного электродви- гателя лежит физическое явление взаимодействия вращаю- щегося магнитного поля статора с током, наведенным этим полем в обмотке ротора.
К обмотке статора, выполненной в виде трех групп катушек, приложено электрическое напряжение, под дейст- вием которого по ней проходит трехфазный переменный, ток и создает вращающееся магнитное поле. Пересекая замкнутую обмотку ротора, данное поле наводит в ней в соответствии с законом электромагнитной индукции ток. В результате взаимодействия вращающегося магнитного поля статора с токами ротора возникает вращающий элект- ромагнитный момент, приводящий ротор в движение. Теперь ротор способен выполнять механическую работу, т. е. сооб- щать движение соединенной с его валом технологической машине (транспортеру, насосу, вентилятору и др.). Таким образом, в электродвигателе происходит превращение элек- трической энергии в механическую.
Магнитное поле вращается в пространстве с частотой и, (мин ‘):
где f — частота переменного тока, Гц; р — число пар полюсов обмотки статора.
Промышленная частота переменного тока равна 50 пе- риодам в 1 с (50 Гц). Следовательно, частота вращения вала электродвигателя зависит от числа пар полюсов (ска- жем, если р = 1, 2, 3, 4 и т. д., то на основании приведенной формулы и — — 3000, 1500, 750, 600 мин
На какие два типа делятся асинхронные электро- двигатели?
Асинхронные электродвигатели делятся на коротко- замкнутые и с фазным ротором. В сельскохозяйственном производстве наиболее распространены короткозамкнутые асинхронные электродвигатели.
В чем принципиальное отличие асинхронного двигателя от синхронного?
Частота вращения ротора асинхронного двигателя всегда меньше синхронной частоты п„так как только при этом условии в обмотке ротора наводится ток, взаимодействие которого с вращающимся полем статора и создает силу, движущую ротор. Именно поэтому такой двигатель на- зывают асинхронным в отличие от синхронного, ротор ко- торого вращается с постоянной (синхронной) частотой, равной частоте вращения магнитного поля. Частота враще- ния ротора асинхронных двигателей небольшой мощности меньше синхронной на 2 .6
Из каких основных частей состоит асинхронный двигатель?
Асинхронный двигатель состоит из двух основных частей: неподвижной — статора и вращающейся — ротора.
Как обозначают и соединяют выводы обмоток статора?
Начало и конец первой обмотки обозначают соответст-
венно Cl и С4, второй — С2 и C5, третьей — C3 и Сб. В за- висимости от напряжения, на которое рассчитывается дви- гатель, обмотки соединяют по. двум основным схемам, но-
Рис. 99. Схема включения обмоток статора асинхронного электро- двигателя и соединение обмоток на доске зажимов: а — звездой; 6 — треугольником.
Другие статьи по теме
Расчет ковшового элеватора и выбор его основных элементов
В данной курсовой работе производится расчет ковшового элеватора и выбор его основных элементов. Расчет состоит из предварительного и уточненного (проверочного) тягового, который производится методом обхода по контуру. Выбор осно .
Дугогасительные устройства элегазовых выключателей
Одним из быстроразвивающихся направлений создания новых выключателей переменного тока высокого и сверхвысокого напряжения, отличающихся меньшими габаритами и отвечающих требованиям современной энергетики по коммутационной способн .
Электродвигатель предназначен для преобразования, с малыми потерями, электрическую энергию в механическую.
Предлагаем рассмотреть принцип действия асинхронного электродвигателя с короткозамкнутым ротором, трехфазного и однофазного типа, а также его конструкцию и схемы подключения.
Строение двигателя
Основные элементы электродвигателя это – статор, ротор, их обмотки и магнитопровод.
Преобразование электрической энергии в механическую происходит во вращающейся части мотора — роторе.
У двигателя переменного тока, ротор получает энергию не только за счет магнитного поля, но и при помощи индукции. Таким образом, они называются асинхронными двигателями. Это можно сравнить с вторичной обмоткой трансформатора. Эти асинхронные двигатели еще называют вращающимися трансформаторами. Чаще всего используется модели рассчитанные на трех фазное включение.
Конструкция асинхронного двигателя
Направление вращения электродвигателя задается правилом левой руки буравчика: оно демонстрирует связь между магнитным полем и проводником.
Второй очень важный закон – Фарадея:
- ЭДС наводиться в обмотке, но электромагнитный поток меняется во временем.
- Величина наведенной ЭДС прямо пропорциональна скорости изменения электрического потока.
- Направление ЭДС противодействует току.
Принцип действия
При подаче напряжения на неподвижные обмотки статора, оно создает магнитное в статора. Если подается напряжение переменного тока, то магнитный поток, созданный им, изменяется. Так статор производит изменение магнитного поля, и ротор получает магнитные потоки.
Таким образом, ротор электродвигателя принимает эти поток статора и, следовательно, вращается. Это основной принцип работы и скольжения в асинхронных машинах. Из вышеизложенного следует отметить, что магнитный поток статора (и его напряжение) должно быть равно переменному току для вращения ротора, так что асинхронная машина может работать только от сети переменного тока.
Принцип работы асинхронного двигателя
Когда такие двигатели действуют в качестве генератора, они будет генерировать непосредственно переменный ток. В случае такой работы, ротор вращается с помощью внешних средств скажем, турбины. Если ротор имеет некоторый остаточный магнетизм, то есть некоторые магнитные свойства, которые сохраняет по типу магнита внутри материала, то ротор создает переменный поток в стационарной обмотке статора. Так что это обмотки статора будут получать наведенное напряжение по принципу индукции.
Индукционные генераторы используются в небольших магазинах и домашних хозяйствах, чтобы обеспечить дополнительную поддержку питания и являются наименее дорогостоящими из-за легкого монтажа. В последнее время они широко используется людьми в тех странах, где электрические машины теряют мощность из-за постоянных перепадов напряжения в питающей электросети. Большую часть времени, ротор вращается при помощи небольшого дизельного двигателя соединенного с асинхронным генератором переменного напряжения.
Как вращается ротор
Вращающийся магнитный поток проходит через воздушный зазор между статором, ротором и обмоткой неподвижных проводников в роторе. Этот вращающийся поток, создает напряжение в проводниках ротора, тем самым заставляя наводиться в них ЭДС. В соответствии с законом Фарадея электромагнитной индукции, именно это относительное движение между вращающимся магнитным потоком и неподвижными обмотками ротора, которые возбуждает ЭДС, и является основой вращения.
Двигатель с короткозамкнутым ротором, в котором проводники ротора образовывают замкнутую цепь, в следствии чего возникает ЭДС наводящая ток в нем, направление задается законом Ленса, и является таким, чтобы противодействовать причине его возникновения. Относительное движение ротора между вращающимся магнитным потоком и неподвижным проводником и является его действием к вращению. Таким образом, чтобы уменьшить относительную скорость, ротор начинает вращаться в том же направлении, что и вращающийся поток на обмотках статора, пытаясь поймать его. Частота наведенной на него ЭДС такая же, как частота питания.
Гребневые асинхронные двигатели
Когда напряжение питания низкое, возбуждение обмоток короткозамкнутого ротора не происходит. Это обусловлено тем что, когда число зубцов статора и число зубьев ротора равное, таким образом вызывая магнитную фиксацию между статором и ротором. Этот физический контакт иначе называется зубо-блокировкой или магнитной блокировкой. Данная проблема может быть преодолена путем увеличения количества пазов ротора или статора.
Подключение
Асинхронный двигатель можно остановить, просто поменяв местами любые два из выводов статора. Это используется во время чрезвычайных ситуаций. После он изменяет направление вращающегося потока, который производит вращающий момент, тем самым вызывая разрыв питания на роторе. Это называется противофазным торможением.
Видео: Как работает асинхронный двигатель
Для того чтобы этого не происходило в однофазном асинхронном двигателе, необходимо использование конденсаторного устройства.
Его нужно подключить к пусковой обмотке, но предварительно обязательно проводится его расчет. Формула
QC = Uс I 2 = U 2 I 2 / sin 2
Схема: Подключение асинхронного двигателя
Из которой следует, что электрические машины переменного тока двухфазного или однофазного типа, должны снабжаться конденсаторами с мощностью, равной самой мощности двигателя.
Аналогия с муфтой
Рассматривая принцип действия асинхронного электродвигателя, используемого в промышленных машинах, и его технические характеристики, нужно сказать про вращающуюся муфту механического сцепления . Крутящий момент на валу привода должен равняться крутящему моменту на ведомом валу. Кроме того, следует подчеркнуть, что эти два момента являются одним и тем же, поскольку крутящий момент линейного преобразователя вызывается трением между дисков внутри самой муфты.
Электромагнитная муфта сцепления
Похожий принцип действия и у тягового двигателя с фазным ротором. Система такого мотора состоит из восьми полюсов (из которых 4 – основные, а 4 – добавочные), и остовы. На основных полюсах расположены медные катушки. Вращение такого механизма обязано зубчатой передаче, которая получает крутящий момент от вала якоря, так же называемого сердечником. Включение в сеть, производится четырьмя гибкими кабелями. Основное назначение многополюсного электродвигателя – приведение в движение тяжелой техники: тепловозы, тракторы, комбайны и в некоторых случаях, станки.
Достоинства и недостатки
Устройство асинхронного двигателя является практически универсальным, но так же, у данного механизма есть свои плюсы и минусы.
Преимущества асинхронных двигателей переменного тока:
- Конструкция простой формы.
- Низкая стоимость производства.
- Надежная и практичная в обращении конструкция.
- Не прихотлив в эксплуатации.
- Простая схема управления
Эффективность этих двигателей очень высока, так как нет потерь на трение, и относительно высокий коэффициент мощности.
Недостатки асинхронных двигателей переменного тока:
- Не возможен контроль скорости без потерь мощности.
- Если увеличивается нагрузка – уменьшается момент.
- Относительно небольшой пусковой момент.
В промышленности наибольшее распространение получили асинхронные двигатели трехфазного тока. Рассмотрим устройство и принцип действия этих двигателей.
Принцип действия асинхронного двигателя основан на использовании вращающегося магнитного поля.
Для уяснения работы такого двигателя проделаем следующий опыт.
Укрепим подковообразный магнит на оси таким образом, чтобы его можно было вращать за ручку. Между полюсами магнита расположим на оси медный цилиндр, могущий свободно вращаться.
Рисунок 1. Простейшая модель для получения вращающегося магнитного поля
Начнем вращать магнит за ручку по часовой стрелке. Поле магнита также начнет вращаться и при вращении будет пересекать своими силовыми линиями медный цилиндр. В цилиндре, по закону электромагнитной индукции, возникнут вихревые токи, которые создадут свое собственное магнитное поле — поле цилиндра. Это поле будет взаимодействовать с магнитным полем постоянного магнита, в результате чего цилиндр начнет вращаться в ту же сторону, что и магнит.
Установлено, что скорость вращения цилиндра несколько меньше скорости вращения поля магнита.
Действительно, если цилиндр вращается с той же скоростью, что и магнитное поле, то магнитные силовые линии не пересекают его, а следовательно, в нем не возникают вихревые токи, вызывающие вращение цилиндра.
Скорость вращения магнитного поля принято называть синхронной , так как она равна скорости вращения магнита, а скорость вращения цилиндра — асинхронной (несинхронной). Поэтому сам двигатель получил название асинхронного двигателя . Скорость вращения цилиндра (ротора) отличается от синхронной скорости вращения магнитного поля на небольшую величину, называемую скольжением.
Обозначив скорость вращения ротора через n1 и скорость вращения поля через n мы можем подсчитать величину скольжения в процентах по формуле:
В приведенном выше опыте вращающееся магнитное поле и вызванное им вращение цилиндра мы получали благодаря вращению постоянного магнита, поэтому такое устройство еще не является электродвигателем . Надо заставить электрический ток создавать вращающееся магнитное поле и использовать его для вращения ротора. Задачу эту в свое время блестяще разрешил М. О. Доливо-Добровольский. Он предложил использовать для этой цели трехфазный ток.
Устройство асинхронного электродвигателя М. О. Доливо-Добровольского
Рисунок 2. Схема асинхронного электродвигателя Доливо-Добровольского
На полюсах железного сердечника кольцевой формы, называемого статором электродвигателя , помещены три обмотки, сети трехфазного тока 0 расположенные одна относительно другой под углом 120°.
Внутри сердечника укреплен на оси металлический цилиндр, называемый ротором электродвигателя.
Если обмотки соединить между собой так, как показано на рисунке, и подключить их к сети трехфазного тока, то общий магнитный поток, создаваемый тремя полюсами, окажется вращающимся.
На рисунке 3 показан график изменения токов в обмотках двигателя и процесс возникновения вращающегося магнитного поля.
Рассмотрим – подробнее этот процесс.
Рисунок 3. Получение вращающегося магнитного поля
В положении «А» на графике ток в первой фазе равен нулю, во второй фазе он отрицателен, а в третьей положителен. Ток по катушкам полюсов потечет в направлении, указанном на рисунке стрелками.
Определив по правилу правой руки направление созданного током магнитного потока, мы убедимся, что на внутреннем конце полюса (обращенном к ротору) третьей катушки будет создан южный полюс (Ю), а на полюсе второй катушки — северный полюс (С). Суммарный магнитный поток будет направлен от полюса второй катушки через ротор к полюсу третьей катушки.
В положении «Б» на графике ток во второй фазе равен нулю, в первой фазе он положителен, а в третьей отрицателен. Ток, протекая по катушкам полюсов, создает на конце первой катушки южный полюс (Ю), на конце третьей катушки северный полюс (С). Суммарный магнитный поток теперь будет направлен от третьего полюса через ротор к первому полюсу, т. е. полюсы при этом переместятся на 120°.
В положении «В» на графике ток в третьей фазе равен нулю, во второй фазе он положителен, а в первой отрицателен. Теперь ток, протекая по первой и второй катушкам, создаст на конце полюса первой катушки — северный полюс (С), а на конце полюса второй катушки — южный полюс (Ю), т. е. полярность суммарного магнитного поля переместится еще на 120°. В положении «Г» на графике магнитное поле переместится еще на 120°.
Таким образом, суммарный магнитный поток будет менять свое направление с изменением направления тока в обмотках статора (полюсов).
При этом за один период изменения тока в обмотках магнитный поток сделает полный оборот. Вращающийся магнитный поток будет увлекать за собой цилиндр, и мы получим таким образом асинхронный электродвигатель.
Напомним, что на рисунке 3 обмотки статора соединены «звездой», однако вращающееся магнитное поле образуется и при соединении их «треугольником».
Если мы поменяем местами обмотки второй и третьей фаз, то магнитный поток изменит направление своего вращения на обратное.
Такого же результата можно добиться, не меняя местами обмотки статора, а направляя ток второй фазы сети в третью фазу статора, а третью фазу сети — во вторую фазу статора.
Таким образом, изменить направление вращения магнитного поля можно переключением двух любых фаз.
Мы рассмотрели устройство асинхронного двигателя, имеющего на статоре три обмотки . В этом случае вращающееся магнитное поле двухполюсное и число его оборотов в одну секунду равно числу периодов изменения тока в одну секунду.
Если на статоре разместить по окружности шесть обмоток, то будет создано четырехполюсное вращающееся магнитное поле . При девяти обмотках поле будет шестиполюсным.
При частоте трехфазного тока f , равной 50 периодам в секунду, или 3000 в минуту, число оборотов n вращающегося поля в минуту будет:
при двухполюсном статоре n = (50 х 60 ) / 1 = 3000 об/мин,
при четырехполюсном статоре n = (50 х 60 ) / 2 = 1500 об/мин,
при шестиполюсном статоре n = (50 х 60 ) / 3 = 1000 об/мин,
при числе пар полюсов статора, равном p : n = (f х 60 ) / p ,
Итак, мы установили скорость вращения магнитного поля и зависимость ее от числа обмоток на статоре двигателя.
Ротор же двигателя будет, как нам известно, несколько отставать в своем вращении.
Однако отставание ротора очень небольшое. Так, например, при холостом ходе двигателя разность скоростей составляет всего 3%, а при нагрузке 5 – 7%. Следовательно, обороты асинхронного двигателя при изменении нагрузки изменяются в очень небольших пределах, что является одним из его достоинств.
Рассмотрим теперь устройство асинхронных электродвигателей
Статор современного асинхронного электродвигателя имеет невыраженные полюсы, т. е. внутренняя поверхность статора сделана совершенно гладкой.
Чтобы уменьшить потери на вихревые токи, сердечник статора набирают из тонких штампованных стальных листов. Собранный сердечник статора закрепляют в стальном корпусе.
В пазы статора закладывают обмотку из медной проволоки. Фазовые обмотки статора электродвигателя соединяются «звездой» или «треугольником», для чего все начала и концы обмоток выводятся на корпус — на специальный изоляционный щиток. Такое устройство статора очень удобно, так как позволяет включать его обмотки на разные стандартные напряжения.
Ротор асинхронного двигателя , подобно статору, набирается из штампованных листов стали. В пазы ротора закладывается обмотка.
В зависимости от конструкции ротора асинхронные электродвигатели делятся на двигатели с короткозамкнутым ротором и фазным ротором .
Обмотка короткозамкнутого ротора сделана из медных стержней, закладываемых в пазы ротора. Торцы стержней соединены при помощи медного кольца. Такая обмотка называется обмоткой типа «беличьей клетки». Заметим, что медные стержни в пазах не изолируются.
В некоторых двигателях «беличью клетку» заменяют литым ротором.
Асинхронный двигатель с фазным ротором (с контактными кольцами) применяется обычно в электродвигателях большой мощности и в тех случаях; когда необходимо, чтобы электродвигатель создавал большое усилие при трогании с места. Достигается это тем, что в обмотки фазного двигателя включается пусковой реостат.
Короткозамкнутые асинхронные двигатели пускаются в ход двумя способами:
1) Непосредственным подключением трехфазного напряжения сети к статору двигателя. Этот способ самый простой и наиболее популярный.
2) Снижением напряжения, подводимого к обмоткам статора. Напряжение снижают, например, переключая обмотки статора со «звезды» на «треугольник».
Пуск двигателя в ход происходит при соединении обмоток статора «звездой», а когда ротор достигнет нормального числа оборотов, обмотки статора переключаются на соединение «треугольником».
Ток в подводящих проводах при этом способе пуска двигателя уменьшается в 3 раза по сравнению с тем током, который возник бы при пуске двигателя прямым включением в сеть с обмотками статора, соединенными «треугольником». Однако этот способ пригоден лишь в том случае, если статор рассчитан для нормальной работы при соединении его обмоток «треугольником».
Наиболее простым, дешевым и надежным является асинхронный электродвигатель с короткозамкнутым ротором , но этот двигатель обладает некоторыми недостатками — малым усилием при трогании с места и большим пусковым током. Эти недостатки в значительной мере устраняются применением фазного ротора, но применение такого ротора значительно удорожает двигатель и требует пускового реостата.
Типы асинхронных электродвигателей
Основной тип асинхронных машин — трехфазный асинхронный двигатель . Он имеет три обмотки на статоре, смещенные в пространстве на 120°. Обмотки соединяются в звезду или треугольник и питаются трехфазным переменным током.
Двигатели малой мощности в большинстве случаев выполняются как двухфазные . В отличие от трехфазных двигателей они имеют на статоре две обмотки, токи в которых для создания вращающегося магнитного поля должны быть сдвинуты на угол π /2.
Если токи в обмотках равны по модулю и сдвинуты по фазе на 90°, то работа подобного двигателя ничем не будет отличаться от работы трехфазного. Однако такие двигатели с двумя обмотками на статоре в большинстве случаев питаются от однофазной сети и сдвиг, приближающийся к 90°, создается искусственным путем, обычно за счет конденсаторов.
Однофазный двигатель , имеющий только одну обмотку на статоре, практически неработоспособен. При неподвижном роторе в двигателе создается только пульсирующее магнитное поле и вращающий момент равен нулю. Правда, если ротор такой машины раскрутить до некоторой скорости, то далее она может выполнять функции двигателя.
В этом случае, хотя и будет только пульсирующее поле, но оно слагается из двух симметричных — прямого и обратного, которые создают неравные моменты — больший двигательный и меньший тормозной, возникающий за счет токов ротора повышенной частоты (скольжение относительно обратносинхронного поля больше 1).
В связи с изложенным однофазные двигатели снабжаются второй обмоткой, которая используется как пусковая. В цепь этой обмотки для создания фазового сдвига тока включают конденсаторы, емкость которых может быть достаточно велика (десятки микрофарад при мощности двигателя менее 1 кВт).
В системах управления используются двухфазные двигатели, которые иногда называют исполнительными . Они имеют две обмотки на статоре, сдвинутые в пространстве на 90°. Одна из обмоток, называемая обмоткой возбуждения, непосредственно подключается к сети 50 или 400 Гц. Вторая используется как обмотка управления.
Для создания вращающегося магнитного поля и соответствующего момента ток в обмотке управления должен быть сдвинут на угол, близкий к 90°. Регулирование скорости двигателя, как будет показано ниже, осуществляется изменением значения или фазы тока в этой обмотке. Реверс обеспечивается изменением фазы тока в управляющей обмотке на 180° (переключением обмотки).
Двухфазные двигатели изготовляются в нескольких исполнениях:
с короткозамкнутым ротором,
с полым немагнитным ротором,
с полым магнитным ротором.
Преобразование вращательного движения двигателя в поступательное движение органов рабочей машины всегда связано с необходимостью использования каких-либо механических узлов: зубчатых реек, винта и др. Поэтому иногда целесообразно выполнение двигателя с линейным перемещением ротора-бегунка (название ’’ротор” при этом может быть принято только условно — как движущегося органа).
В этом случае двигатель, как говорят, может быть развернут. Обмотка статора линейного двигателя выполняется так же, как и у объемного двигателя, но только должна быть заложена в пазы на всю длину максимального возможного перемещения ротора-бегунка. Ротор-бегунок обычно короткозамкнутый, с ним сочленяется рабочий орган механизма. На концах статора, естественно, должны находиться ограничители, препятствующие уходу ротора за рабочие пределы пути.
Общие принципы работы (двигатели и приводы)
Введение
Асинхронный двигатель с короткозамкнутым ротором, вероятно, является сегодня наиболее широко используемым двигателем в промышленности. Традиционные применения асинхронных двигателей переменного тока включают вентиляторы и насосы. Асинхронный двигатель переменного тока получил широкое распространение во многих отраслях промышленности с высокими требованиями по сравнению с двигателем постоянного тока, поскольку требует меньшего обслуживания. Двигатели переменного тока довольно часто встречаются в таких приложениях, как компрессоры, станки, конвейеры, смесители
, дробилки, лыжные подъемники и экструдеры.Благодаря своей эффективной работе и характеристикам энергосбережения асинхронный двигатель переменного тока приобретет все большее значение в течение следующих нескольких десятилетий.
Основные принципы работы двигателя любого производителя по сути одинаковы. Конкретные конструкции могут отличаться, например, воздушный зазор между вращающимися частями, прочность изоляции напряжения и устойчивость к скачкам высокого напряжения. Однако основные части асинхронного двигателя одинаковы.
Здесь следует отметить, что в мире двигателей переменного тока существует два основных языка: NEMA (Национальная ассоциация производителей электрооборудования) в Северной Америке и IEC (Международная электротехническая комиссия) в большей части остального мира.До недавнего времени не было необходимости осознавать различия, как тонкие, так и очевидные. Однако все меняется по мере того, как автомобильный рынок становится более глобальным. Эта тенденция получила дополнительный импульс в 1992 году, когда экономики стран Европейского общего рынка стали единым целым.
Позже в этом разделе будут рассмотрены характеристики двигателей NEMA и IEC. Все больше компаний отправляют свою электрическую продукцию за границу, и наоборот. В недалеком будущем будет сложно не соприкасаться с двигателем с рейтингом IEC.Поэтому обзор сравнений будет полезен. Кроме того, поскольку в промышленности широко используются трехфазные асинхронные двигатели, основное внимание в этом разделе будет уделено именно этому типу двигателей. Однако мы также рассмотрим несколько других распространенных типов трехфазных двигателей.
Все двигатели переменного тока можно разделить на однофазные и многофазные (поли означает многофазные или трехфазные). Поскольку в промышленности чаще всего используются многофазные двигатели, мы более подробно рассмотрим конструкцию этих устройств.Имейте в виду, что также используются однофазные двигатели переменного тока для таких приложений, как небольшие приборы, бытовые вентиляторы, печи и многие другие маломощные приложения.
Однако для промышленного применения в основном используются трехфазные асинхронные двигатели. Основное преимущество использования трехфазных двигателей — экономичность. Трехфазные двигатели намного проще по конструкции, чем другие типы, и требуют меньшего обслуживания. Более мощный двигатель может быть встроен в корпус меньшего размера по сравнению с однофазным двигателем.Трехфазный двигатель будет работать с более высоким КПД по сравнению с однофазным двигателем.
Существует несколько типов многофазных двигателей: асинхронные, с фазным ротором и синхронные. Наиболее распространенным типом двигателей этой группы является асинхронный двигатель с короткозамкнутым ротором. Этот тип двигателя будет основой для понимания общих принципов работы двигателя переменного тока.
Асинхронный двигатель переменного тока
Основными частями асинхронного двигателя переменного тока являются ротор (вращающийся элемент) и статор (неподвижный элемент, который генерирует магнитный поток).Конструкция ротора
выглядит как беличья клетка, отсюда и традиционное название: асинхронный двигатель с беличьей клеткой. Рисунок 3-23 показывает конструкцию ротора.
Рисунок 3-23. Ротор асинхронного двигателя с короткозамкнутым ротором
Электродвигатель с короткозамкнутым ротором является самым простым в изготовлении и наиболее легким в обслуживании. Работа двигателя с короткозамкнутым ротором проста. Трехфазный ток создает в статоре вращающееся магнитное поле. Это вращающееся магнитное поле вызывает также создание магнитного поля в роторе.Притяжение и отталкивание между этими двумя магнитными полями заставляет ротор вращаться. Эту концепцию можно увидеть на рисунках 3-24 и 3-25
Рисунок 3-24. Ротор и статор
Двигатель с короткозамкнутым ротором — это двигатель постоянной скорости с нормальным или высоким пусковым моментом. Эти характеристики соответствуют требованиям большинства промышленных приложений.
Концепция вращающегося магнитного поля показана на Рисунке 3-26. На этом рисунке показана зависимость трехфазного магнитного поля от полюсного.Каждая пара магнитных полюсов намотана таким образом, чтобы это допускало статическое
Рисунок 3-25. Вид с торца на два сегмента ротора (магнитное взаимодействие со статором)
Тор магнитное поле для «вращения». Статор двигателя состоит из групп катушек, намотанных на сердечник, которые заключены в рамку. Простой двухполюсный статор, показанный на рис. 3-26, имеет по три катушки в каждой группе полюсов. (Двухполюсный двигатель будет иметь два полюса x три фазы = шесть физических полюсов.) Каждая катушка в группе полюсов подключена к одной фазе трехфазного источника питания.Одной из характеристик трехфазного питания является то, что фазный ток достигает максимального значения в разные промежутки времени. На рисунке 3-26 также показано соотношение между максимальным и минимальным значениями.
Рисунок 3-26. Базовый двухполюсный статор
В качестве примера мы сфокусируемся на моменте времени, когда ток в катушках «А» почти максимален. (Используйте верхний левый угол рисунка 3-25.) Магнитные поля этих катушек также будут почти максимальными. В этот же момент токи фазы «B» равны нулю, а токи фазы «C» немного больше, чем «A.
В более поздний момент времени ток в катушках «B» близок к максимальному с последующим максимизацией магнитного поля катушек «B». В этот же момент поле фазы «С» немного меньше максимального. Поля катушки «А» равны нулю.
Этот же процесс повторяется, когда магнитное поле каждой из фаз достигает максимума, все в разное время (разные степени вращения магнитного поля). Таким образом, максимальное поле последовательно повторяется в точках «A», «C» и «B» непрерывно вокруг статора и по существу определяет вращающееся магнитное поле.
Катушки статора намотаны диаметрально противоположными катушками. Это означает, что они несут одинаковый фазный ток, но соединены так, что их магнитные поля имеют противоположную полярность. Опять же, двигатель, показанный на рис. 3-26, будет иметь конфигурацию двухполюсной обмотки.
Магнитное поле (ротор)
Ротор — это вращающаяся часть двигателя. Ротор состоит из медных или алюминиевых стержней, соединенных на концах концевыми кольцами. См. Рисунок 3-27.
Рисунок 3-27. Конструкция ротора асинхронного двигателя
Внутренняя часть ротора заполнена множеством отдельных стальных дисков, называемых пластинами. Вращающееся поле, создаваемое токами статора, разрезало беличью клетку, проводящую алюминиевые стержни ротора. Это вызывает напряжение в этих стержнях, называемое индуцированным напряжением. Это напряжение заставляет ток течь по алюминиевым стержням. Ток создает магнитное поле вокруг стержней с соответствующими северным и южным полюсами в роторе.Крутящий момент создается из
притяжения и отталкивания между этими полюсами и полюсами вращающегося поля статора.
На Рис. 3-28 показана сборка деталей в единый асинхронный двигатель.
Рисунок 3-28. Конструкция асинхронного двигателя
Генерация вихревых токов
Магнитное поле вращающегося статора и индуцированное напряжение в стержнях ротора также вызывают напряжение в сердечниках статора и ротора.Напряжение в этих сердечниках вызывает протекание небольших циркулирующих токов. Эти токи, называемые вихревыми токами, бесполезны и приводят только к потере мощности. Чтобы уменьшить эти токи, сердечники статора и ротора выполнены из пластин. (обсуждалось в предыдущем разделе). Эти листы покрываются изолирующим лаком, а затем свариваются, образуя сердцевину. Этот тип сердечника существенно снижает потери на вихревые токи, но не устраняет их полностью.
Конструкция асинхронного двигателя Инженеры
могут спроектировать двигатели практически для любого применения, изменив конструкцию обмоток ротора и статора с короткозамкнутым ротором.Такие характеристики, как скорость, крутящий момент и напряжение, — это лишь некоторые из функций, контролируемых проектировщиком.
Для стандартизации определенных характеристик двигателей Национальная ассоциация производителей электрооборудования (NEMA) установила стандарты для ряда характеристик двигателей. Следующий раздел содержит множество функций, которые будут полезны при выборе правильного двигателя для конкретного применения.
Контроль скорости, крутящего момента и мощности
Контроль скорости
Скорость двигателя с короткозамкнутым ротором зависит от частоты и количества полюсов, на которые намотан двигатель.Чем выше частота, тем быстрее работает двигатель. Чем больше у мотора полюсов, тем медленнее он работает. Наименьшее количество полюсов, когда-либо использовавшихся в двигателе с короткозамкнутым ротором, — два. Двухполюсный двигатель 60 Гц будет работать со скоростью примерно 3600 об / мин. Как скоро будет видно, двигатель всегда будет работать со скоростью менее 3600 об / мин.
Чтобы найти приблизительную скорость любого двигателя с короткозамкнутым ротором, можно использовать формулу для синхронной скорости, которая фактически является скоростью вращающегося магнитного поля:
N = синхронная скорость (об / мин)
F = частота источника питания ( Герц)
P = количество полюсов статора
Асинхронные двигатели с короткозамкнутым ротором намотаны для синхронных скоростей, указанных в таблице 3-1.
| Кол-во полюсов | Sync. скорость (при 60 Гц) | Sync. скорость (при 50 Гц) |
| 2 | 3600 | 3000 |
| 4 | 1800 | 1500 |
| 6 | 1200 | 1000 |
| CO | 900 | 750 |
| 10 | 720 | 600 |
| 12 | 600 | 500 |
Таблица 3-1.Синхронные скорости двигателя в зависимости от количества полюсов
Большинство стандартных асинхронных двигателей (типоразмеры от NEMA 143T до 445T) имеют максимум восемь полюсов.
Фактическая скорость вала двигателя несколько меньше синхронной скорости. Эта разница между синхронной и фактической скоростями определяется как скольжение. Если бы ротор с короткозамкнутым ротором вращался со скоростью поля статора, стержни ротора были бы неподвижны по отношению к вращающемуся магнитному полю. В стержнях ротора не будет индуцироваться напряжение, и стержни ротора не будут сокращать магнитный поток.В результате не будет тока, настроенного для создания крутящего момента. Поскольку крутящий момент не создается, ротор будет замедляться до тех пор, пока не будет индуцирован ток, достаточный для развития крутящего момента. Когда крутящий момент развивается, ротор разгоняется до постоянной скорости. Рисунок 3-29 представляет собой графическое представление скольжения.
Рисунок 3-29. Скольжение в асинхронном двигателе
Подведем итог: должна быть разница между вращающимся магнитным полем статора и фактическим положением стержней ротора. Это позволяет стержням ротора прорезать магнитные поля статора и создавать магнитное поле в роторе.Взаимодействие магнитных полей статора и ротора создает притяжение, необходимое для развития крутящего момента.
Когда нагрузка на двигатель увеличивается, скорость ротора уменьшается. Затем вращающееся поле режет стержни ротора с большей скоростью, чем раньше. Это приводит к увеличению тока в стержнях ротора и увеличению силы магнитного полюса ротора. В основном, с увеличением нагрузки увеличивается и выходной крутящий момент.
Скольжение обычно выражается в процентах и может быть легко рассчитано по следующей формуле:
Двигатели с короткозамкнутым ротором
имеют скольжение в диапазоне от 3 до 20%.Двигатели со скольжением 5% или выше используются в приложениях с затрудненным запуском. Двигатель со скольжением 5% или менее называется двигателем с нормальным скольжением. Двигатель с нормальным скольжением часто называют двигателем с постоянной скоростью, потому что скорость очень мало изменяется при изменении нагрузки.
При указании скорости двигателя на паспортной табличке большинство производителей двигателей используют фактическую скорость двигателя при номинальной нагрузке. Используемый термин — базовая скорость. Базовая скорость — это скорость несколько ниже синхронной скорости
.Он определяется как фактическая частота вращения ротора при номинальном напряжении, номинальных герцах и номинальной нагрузке.
Направление вращения
Направление вращения асинхронного двигателя с короткозамкнутым ротором зависит от подключения двигателя к линиям электропередачи. Вращение можно легко изменить, поменяв местами любые два входных провода.
Управление крутящим моментом и мощностью
Как обсуждалось ранее, мощность в лошадиных силах учитывает скорость вращения вала. Для быстрого вращения вала требуется больше лошадиных сил, чем для его медленного вращения.Примечание. Лошадиная сила — это скорость выполнения работы.
По определению, 1 л.с. равняется 33 000 фут-фунт в минуту. Другими словами, поднятие веса 33000 фунтов на 1 фут за 1 минуту потребует 1 HP.
Используя знакомую формулу ниже, мы можем определить мощность, развиваемую асинхронным двигателем переменного тока.
T = крутящий момент в фунт-футах N = скорость в об / мин
Например, вал двигателя вращается со скоростью 5 об / мин и развивает крутящий момент 3 фунт-фут. Подставляя известную информацию в формулу, мы вычисляем, что двигатель развивает примерно 0.003 л.с. (3 x 5 -f 5252 = 0,0028). Как показывает формула, мощность в лошадиных силах напрямую связана со скоростью вала двигателя. Если вал будет вращаться вдвое быстрее (10 об / мин), двигатель будет развивать почти 0,006 л.с., то есть вдвое больше.
Мы можем увидеть общие эмпирические правила для развиваемого крутящего момента в зависимости от скорости, просмотрев Таблицу 3-2.
Развиваемый крутящий момент будет незначительно отличаться для двигателей с меньшей мощностью и частотой вращения или нестандартных двигателей.
Как видно из таблицы 3-2, при более высоких синхронных скоростях асинхронный двигатель развивает меньший крутящий момент по сравнению с более низкими скоростями.Мы также можем видеть, что чем больше число полюсов, тем больше крутящий момент.
| Кол-во полюсов | Sync. скорость (при 60 Гц) | Крутящий момент, развиваемый на HP |
| 2 | 3600 | 1,5 фунт-фут |
| 4 | 1800 | 3 фунт-фут |
| 6 | 1200 | 4,5 фунт-фут |
| 8 | 900 | 6 фунт-футов |
| 10 | 720 | 7.5 фунт-футов |
| 12 | 600 | 8,75 фунт-футов |
Таблица 3-2. Асинхронный двигатель переменного тока — скорость в зависимости от развиваемого крутящего момента
В основном, чем больше полюсов, тем сильнее создаются магнитные поля. Чем больше магнитный поток взаимодействует с потоком ротора, тем сильнее крутящее движение, тем самым развивая больший крутящий момент.
Что касается крутящего момента двигателя, на стандартной кривой скорости / крутящего момента есть несколько областей, которые следует рассмотреть.Асинхронный двигатель создан для обеспечения этого дополнительного крутящего момента, необходимого для запуска нагрузки. Кривая крутящего момента типичного асинхронного двигателя показана на Рисунке 3-30.
Рисунок 3-30. Кривая скорость / крутящий момент для двигателя NEMA конструкции B
На рис. 3-30 показано, что пусковой крутящий момент составляет около 250% от крутящего момента при номинальной нагрузке.
Пик (пробой) крутящий момент
Иногда двигатель может внезапно перегрузиться. Чтобы двигатель не останавливался каждый раз при возникновении перегрузки, двигатели имеют так называемый момент пробоя.Точка крутящего момента пробоя намного выше, чем точка крутящего момента номинальной нагрузки. По этой причине для остановки двигателя требуется значительная перегрузка. Кривая скорость / крутящий момент, показанная на рисунке 3-30, показывает, что крутящий момент для типичного асинхронного двигателя составляет около 270% от номинального момента нагрузки.
Эксплуатация двигателя с перегрузкой в течение длительного периода времени вызовет чрезмерное нагревание двигателя и, в конечном итоге, может сжечь обмотки двигателя.
Определения и номинальные значения NEMA для характеристического крутящего момента асинхронного двигателя приведены ниже в этом разделе.
Момент заторможенного ротора (пусковой момент или момент отрыва)
Крутящий момент заблокированного ротора двигателя — это минимальный крутящий момент, который он будет развивать в состоянии покоя для всех угловых положений ротора. Эта возможность верна при номинальном напряжении и частоте.
Момент подъема
Повышающий крутящий момент двигателя — это минимальный крутящий момент, развиваемый двигателем при ускорении от состояния покоя до точки крутящего момента срыва. Для двигателей, у которых нет определенного момента пробоя, тяговый момент — это минимальный крутящий момент, развиваемый до номинальной скорости.
Пик (пробой) крутящий момент
Пробойный момент двигателя — это максимальный крутящий момент, который он развивает. Эта возможность сохраняется при номинальном напряжении и частоте, без резкого падения скорости.
Номинальный момент нагрузки
Номинальный момент нагрузки двигателя — это крутящий момент, необходимый для создания номинальной мощности двигателя при номинальной скорости нагрузки. (Примечание: номинальная скорость нагрузки обычно считается базовой скоростью. Базовая скорость означает фактическую скорость ротора, когда на двигатель прикладываются номинальное напряжение, частота и нагрузка.)
Все приведенные выше обозначения крутящего момента очень важны для разработчика двигателя. По сути, двигатели могут быть сконструированы с акцентом на одну или несколько из вышеперечисленных характеристик крутящего момента для производства двигателей для различных применений. Улучшение одной из этих характеристик крутящего момента может отрицательно повлиять на некоторые другие характеристики двигателя.
Типы корпусов и охлаждение
Двигатели часто подвергаются воздействию опасной атмосферы, такой как чрезмерная влажность, пар, соленый воздух, абразивная или токопроводящая пыль, ворс, химические пары, а также горючая или взрывоопасная пыль или газы.Для защиты двигателей может потребоваться определенный кожух или герметизированные обмотки и специальная защита подшипников.
Двигатели, подверженные следующим условиям, могут потребовать специальных креплений или защиты: повреждение механических или электрических нагрузок, таких как несбалансированное напряжение, аномальные удары или вибрация, крутильные ударные нагрузки, чрезмерное осевое усилие или радиальные нагрузки.
Доступно множество типов корпусов. Здесь перечислены некоторые из наиболее распространенных типов, многие из которых имеют те же обозначения, что и двигатели постоянного тока.Настоятельно рекомендуется, чтобы персонал, активно участвующий в применении асинхронных двигателей, был знаком с содержанием NEMA MG2 («Стандарт безопасности при строительстве и Руководство по выбору, установке и использованию электродвигателей и генераторов») и придерживался его.
Открытый двигатель
Двигатель открытого типа с кожухом имеет вентиляционные отверстия, которые обеспечивают прохождение внешнего охлаждающего воздуха над обмотками и вокруг них.
Открытый каплезащищенный двигатель
Кожух открытого типа с защитой от капель (ODP) сконструирован таким образом, что капли жидкости или твердых частиц, падающие на машину с вертикального направления, не могут попасть в машину.(Угол этого вертикального направления не превышает 15 °.)
Охраняемый двигатель
(Это может быть сокращенно DPFG — каплезащищенный, полностью защищенный). В закрытом корпусе все вентиляционные отверстия ограничены указанными размерами и формами. Этот кожух предотвращает вставку пальцев или стержней и ограничивает случайный контакт с вращающимися или электрическими частями.
Брызгозащищенный двигатель
Брызгозащищенный корпус сконструирован таким образом, что капли жидких или твердых частиц, падающие на двигатель, не могут попасть внутрь.(Эти жидкие или твердые частицы могут располагаться по прямой линии или под любым углом не более 100 ° от вертикали.)
Двигатель полностью закрытого типа
Корпус полностью закрытого типа предотвращает свободный обмен воздуха между внутренней и внешней частью корпуса, но не является воздухонепроницаемым.
Полностью закрытый невентилируемый двигатель (TENV)
Полностью закрытый невентилируемый кожух не оборудован для охлаждения внешними устройствами.
Двигатель полностью закрытого типа с вентиляторным охлаждением (TEFC)
Корпус полностью закрытого типа с вентиляторным охлаждением имеет установленный на валу вентилятор для продувки охлаждающим воздухом через внешнюю раму.Это популярный двигатель для использования в пыльной, грязной и агрессивной атмосфере.
Двигатель полностью закрытого типа с воздушным охлаждением (TEBC)
Полностью закрытый корпус с вентиляторным охлаждением является полностью закрытым и оснащен вентилятором с независимым приводом для продувки охлаждающим воздухом через внешнюю раму. Двигатель TEBC обычно используется в приложениях с постоянным крутящим моментом и регулируемой скоростью.
Герметичный двигатель
Герметичный корпус имеет обмотки, покрытые толстым слоем материала для защиты от влаги, грязи, истирания и т. Д.Некоторые герметизированные двигатели имеют покрытие только на носиках змеевика. В двигателях с заделанными под давлением обмотками герметизирующий материал пропитывает обмотки даже в пазах катушек. Благодаря этой полной защите двигатели часто могут использоваться в приложениях, требующих полностью закрытых двигателей.
Взрывозащищенный двигатель (TEXP)
Взрывозащищенный корпус полностью закрыт и сконструирован таким образом, чтобы выдерживать взрыв газа или пара внутри него. Он также предотвращает воспламенение газа или пара, окружающего машину, в результате искр, вспышек или взрывов, которые могут возникнуть внутри корпуса машины.
Защита и номинальные характеристики
Защита двигателя
Типичный метод пуска трехфазного асинхронного двигателя — подключение двигателя непосредственно к линии электропередачи. Линейный пуск двигателя осуществляется трехфазным контактором. Для адекватной защиты двигателя от длительных перегрузок устанавливаются устройства защиты от перегрузки, как правило, в том же корпусе, что и трехфазный контактор. Эти перегрузки (OL) работают как нагревательные элементы — нагревая до точки размыкания цепи и механически разъединяя цепь (Рисунок 3-31).
Рисунок 3-31. Линия запуска двигателя
Перегрузки можно приобрести с определенным временем, заложенным в элемент. Классы 10, 20 и 30 — обычные рейтинги для промышленного использования. Перегрузка класса 10 означает, что перегрузка допускает пусковой ток 600% в течение 10 с перед размыканием цепи. Перегрузки класса 20 допускают пусковой ток 600% в течение 20 с, а класс 30 допускает работу 30 с. Ток, потребляемый типичным асинхронным двигателем, а также создаваемый крутящий момент можно увидеть на Рисунке 3-32.
Линейный пуск асинхронного двигателя, как показано на Рисунке 3-32, позволит двигателю развивать номинальный крутящий момент, как только будет нажата кнопка пускателя двигателя. Это связано с тем, что двигатель через линию имеет преимущество полного напряжения, тока и частоты (Гц). Пока входная мощность имеет номинальное значение, двигатель будет развивать крутящий момент, как показано на рисунке 3-32, от нуля до базовой скорости.
Рисунок 3-32. Крутящий момент двигателя и пусковой ток (линейный пуск)
Если соотношение напряжения к герцам сохраняется, то двигатель развивает номинальный крутящий момент, который он был разработан.Это соотношение можно увидеть на рис. 3-33 и обозначено как отношение вольт на герц (В / Гц).
Рисунок 3-33. Соотношение вольт на Гц (В / Гц)
Как видно на Рисунке 3-33, соотношение В / Гц рассчитывается путем простого деления входного напряжения на герцы. Эта характеристика является важной составляющей конструкции привода переменного тока, которая будет рассмотрена в следующей теме.
Могут быть приложения, в которых полный крутящий момент нежелателен при запуске двигателя: например, конвейерное приложение на линии розлива.Если подающий конвейер имеет открытые полные бутылки на конвейере, полный крутящий момент при запуске конвейера будет не очень хорошей ситуацией. (Из бутылок выльется все свое содержимое.) В подобных случаях потребуется запуск с пониженным крутящим моментом. Также бывают случаи, когда полное напряжение и
герц, что вызывает 600% пусковой ток, могут вызвать серьезное падение мощности в системе электроснабжения. Примером могут служить двигатели высокой мощности, подключенные к компрессорам. В этих случаях потребуется запуск при пониженном напряжении.Если напряжение меньше номинального значения, двигатель не будет развивать номинальный крутящий момент (в соответствии с соотношением В / Гц, указанным на Рисунке 3-32). Уменьшение соотношения В / Гц также снижает пусковой ток, что означает меньший провал мощности.
Уменьшение пускового тока может быть выполнено любым из следующих способов.
Первичный резистор или реактивное сопротивление
Метод первичного резистора или реактивного сопротивления использует последовательное реактивное сопротивление или сопротивление для уменьшения тока в течение первых секунд.По истечении заданного временного интервала двигатель подключается напрямую через линию. Этот метод можно использовать с любым стандартным асинхронным двигателем.
Автотрансформатор
В методе автотрансформатора используется автотрансформатор для прямого понижения напряжения и тока в течение первых нескольких секунд. По истечении заданного временного интервала двигатель подключается напрямую через линию. Этот метод также можно использовать с любым стандартным асинхронным двигателем.
звезда-треугольник
По методу звезда-треугольник напряжение подается на соединение Y для уменьшения тока в течение первых нескольких секунд.По истечении заданного интервала времени двигатель подключается в треугольном режиме, допускающем полный ток. Этот тип асинхронного двигателя должен иметь соединение обмоток звезда-треугольник.
Частичная обмотка
В методе частичной обмотки используется конструкция двигателя с двумя отдельными цепями обмоток. При запуске задействуется только одна цепь обмотки, и ток уменьшается. По истечении заданного временного интервала вся обмотка двигателя подключается напрямую через линию. Этот тип двигателя должен иметь две отдельные цепи обмотки.Чтобы избежать перегрева и повреждения обмотки, время между подключением первой и второй обмоток ограничено максимум 4 секундами.
Характеристики двигателя
При рассмотрении номинальных характеристик необходимо также рассмотреть некоторые конструктивные особенности асинхронного двигателя. Классификация конструкции, характеристики и номинальные характеристики асинхронных двигателей теперь будут подробно рассмотрены.
Из-за разнообразия требований к крутящему моменту NEMA разработала различные «конструкции» для почти любого применения.Эти конструкции учитывают пусковой ток и скольжение, а также крутящий момент. Эти классы конструкции двигателя не следует путать с различными классами изоляции проводов, которые также обозначаются буквами.
В таблице 3-3 указаны различные классификации проектов NEMA и подходящие приложения.
| Класс проектирования | Пусковой ток | Крутящий момент заторможенного ротора | Пробивной момент | % Накладка |
Подходящие области применения Вентиляторы, нагнетатели, роторные насосы, ненагруженные компрессоры, станки и т. Д.Постоянная скорость нагрузки. |
| А | Высокая | Med. Момент | Высокая | 5% Макс |
Вентиляторы, нагнетатели, роторные насосы, ненагруженные компрессоры, станки, прочее. Постоянная скорость нагрузки. |
| В | Средний | Med. крутящий момент | Высокая | 5% Макс | Вентиляторы, нагнетатели, роторные насосы, ненагруженные компрессоры, станки и прочее. Постоянные скоростные нагрузки. |
| К | Средний | Высокий крутящий момент | Средний | 5% Макс |
Пуск с высоким моментом инерции (например,г., центробежные нагнетатели, маховики, дробилки. Запуск под нагрузкой (например, поршневые насосы, компрессоры, конвейеры). Постоянная скорость загрузки. |
| Д | Средний | Сверхвысокий крутящий момент | Низкий | 5-13% | Очень высокая инерция, запуск под нагрузкой. Значительные колебания скорости нагрузки (например, штамповочные прессы, ножницы, формовочные станки, краны, подъемники, лифты, домкраты масляных насосов) |
| LU | от среднего до высокого | от среднего до высокого | от среднего до высокого | 75% | Насосы, вентиляторы и нагнетатели |
Таблица 3-3.Расчет крутящего момента NEMA для многофазных двигателей
На рис. 3-34 показаны относительные различия крутящего момента для конкретного класса конструкции двигателя по NEMA. Все указанные двигатели запущены.
Как видно на Рисунке 3-34, основные различия заключаются в пусковом моменте и возможностях максимального или пробивного крутящего момента.
КПД
КПД двигателя — это просто отношение выходной мощности к входящей, выраженное в процентах.
Рисунок 3-35 иллюстрирует общую взаимосвязь между током, скольжением, КПД и коэффициентом мощности.
Рисунок 3-34. Сравнение конструкций NEMA (характеристики скорости / крутящего момента)
Как правило, КПД двигателя относительно невысокий от номинальной нагрузки до 50% номинальной нагрузки. Некоторые двигатели демонстрируют пиковый КПД около 75% от номинальной нагрузки.
Коэффициент мощности
Коэффициент мощности (P.F.) — это отношение реальной мощности к полной, или кВт / кВА. Киловатты (кВт) измеряются ваттметром, а киловольт-амперы (кВА) измеряются вольтметром и амперметром.Коэффициент мощности, равный единице (1,0) или единице, является идеальным. Коэффициент мощности самый высокий около номинальной нагрузки, как показано на Рисунке 3-35. Коэффициент мощности при нагрузке 50% значительно меньше и продолжает резко снижаться до нулевой скорости.
Рисунок 3-35. Соотношение скорости, скольжения, КПД и коэффициента мощности
Текущий розыгрыш
Потребление тока в амперах пропорционально фактической нагрузке на двигатель в области номинальной нагрузки. При других нагрузках потребление тока имеет тенденцию быть более нелинейным (рисунок 3-35).
Заторможенный ротор (кВА / л.с.)
Другой номинал, указанный на паспортных табличках двигателя, — это кВА с заторможенным ротором на одну лошадиную силу. (Некоторые производители используют обозначение «усилители с заблокированным ротором».) На паспортной табличке появляется буква, соответствующая различным номинальным значениям кВА / л.с. См.
Буквенные обозначения в таблице 3-4.
| Буквенный код | кВА / л.с. |
| А | 0–3,14 |
| В | 3.15-3,54 |
| К | 3,55–3,9 |
| Д | 4,0-4,4 |
| E | 4,5–4,9 |
| Ф | 5,0-5,5 |
| G | 5,6-6,2 |
| H | 6,3-7,0 |
| Дж | 7,1-7,9 |
| К | 8,0-8,9 |
| л | 9,0-9,9 |
| M | 10.0-11,1 |
| N | 11,2–12,4 |
| п. | 12,5-13,9 |
| R | 14,0-15,9 |
| S | 16,0-17,9 |
| т | 18,0-19,9 |
| U | 20,0-22,3 |
| В | 22,4 и выше |
Таблица 3-4. Заторможенный ротор, кВА на л.с.
Коды на паспортной табличке являются хорошим индикатором пускового тока в амперах.Нижняя кодовая буква указывает на низкий пусковой ток, а высокая кодовая буква указывает на высокий пусковой ток для определенной номинальной мощности двигателя. Расчет пускового тока можно выполнить по следующей формуле:
Пример: Каков приблизительный пусковой ток двигателя 10 л.с., 208 В с буквенным кодом на паспортной табличке «K»?
Решение: Из Таблицы 3-4 значение кВА / л.с. для кодовой буквы «K» составляет от 8,0 до 8,9. Взяв число примерно посередине и подставив в формулу, мы получим:
Следовательно, пусковой ток составляет примерно 236 ампер.Пусковой ток важен, потому что покупатель двигателя должен знать, какую защиту (от перегрузки) обеспечить. В установку также должны входить линии электропередач достаточного размера, чтобы выдерживать требуемые токи, и предохранители надлежащего размера.
Системы изоляции
Система изоляции — это группа изоляционных материалов в сочетании с проводниками и несущей конструкцией двигателя. Системы изоляции делятся на классы в соответствии с тепловым рейтингом системы.В двигателях используются четыре класса систем изоляции: классы A, B, F и H. Не путайте эти классы изоляции с конструкциями двигателей, которые обсуждались ранее. Эти классы дизайна также обозначаются буквами.
Еще один фактор, вызывающий недоумение, — это классы системы изоляции по напряжению обмоток статора. Эти классы также обозначаются, например, классами B, F и H. NEMA, стандарт MG1, часть 31 указывает классы изоляции по напряжению относительно использования в приводах переменного тока. Более подробный обзор характеристик изоляции напряжения двигателя будет сделан в теме 4.
На этом этапе мы рассмотрим классы температурной изоляции, обычные для стандартных промышленных асинхронных двигателей, работающих на линии.
Класс A. Изоляция класса A — это изоляция, испытания которой показали, что соответствующая термическая стойкость существует при эксплуатации при температуре 105 ° C. Типичные используемые материалы включают хлопок, бумагу, ячеистые ацетатные пленки, проволоку с эмалевым покрытием и аналогичные органические материалы, пропитанные подходящими веществами.
Класс B. Изоляция класса B — это изоляция, испытания которой показали, что соответствующая термическая стойкость существует при эксплуатации при температуре 130 ° C.Типичные материалы включают слюду, стекловолокно, асбест и другие материалы, не обязательно неорганические, с совместимыми связующими веществами, имеющими подходящую термическую стабильность.
Класс F. Изоляция класса F — это изоляция, испытания которой показали, что соответствующая термическая стойкость существует при эксплуатации при температуре 155 ° C. Типичные материалы включают слюду, стекловолокно, асбест и другие материалы, не обязательно неорганические, с совместимыми связующими веществами, имеющими подходящую термическую стабильность.
Класс H.Изоляция класса H — это изоляция, испытания которой показали наличие соответствующей термической стойкости при эксплуатации при температуре 180 ° C. Типичные используемые материалы включают слюду, стекловолокно, асбест, силиконовый эластомер и другие материалы, не обязательно неорганические, с совместимыми связующими веществами, такими как силиконовые смолы, имеющие подходящую термическую стабильность.
Обычные условия обслуживания
При эксплуатации в пределах установленных NEMA «обычных условий эксплуатации» стандартные двигатели будут работать в соответствии со своими номинальными характеристиками.
Для условий эксплуатации, отличных от обычных, необходимо учитывать перечисленные ниже меры предосторожности.
Температура окружающей среды или помещения не выше 40 ° C. Если температура окружающей среды превышает 40 ° C (104 ° F), коэффициент эксплуатации двигателя необходимо уменьшить или использовать двигатель большей мощности. Двигатель большего размера будет загружен ниже полной мощности, поэтому повышение температуры будет меньше, а перегрев — меньше. (Примечание: коэффициент обслуживания относится к номинальной мощности двигателя и указывает допустимую нагрузку на мощность, которую может выдерживать двигатель.Например, коэффициент обслуживания 1,15 позволит двигателю потреблять 15% мощности перегрузки.)
Высота не превышает 3300 футов (1000 метров). Двигатели, имеющие системы изоляции класса A или B и имеющие повышенную температуру в соответствии с NEMA, могут удовлетворительно работать на высоте более 3300 футов. Однако в местах выше 3300 футов снижение температуры окружающей среды должно компенсировать повышение температуры, как показано в Таблице 3-5.
| Окружающая температура. ° С (° F) | Макс.высота (фут) |
| 40 (104) | 3300 |
| 30 (86) | 6600 |
| 20 (68) | 9900 |
Таблица 3-5. Температура в зависимости от высоты
Двигатели с эксплуатационным коэффициентом 1,15 или выше будут удовлетворительно работать при единичном эксплуатационном коэффициенте и температуре окружающей среды 40 ° C на высоте от 3300 футов до 9000 футов.
Колебания напряжения. Колебания напряжения не более чем на ± 10% от напряжения, указанного на паспортной табличке:
Работа вне этих пределов или условия несбалансированного напряжения могут привести к перегреву или потере крутящего момента и могут потребовать использования двигателя большей мощности.
Частотные колебания. Изменение частоты не более чем на ± 5% от частоты, указанной на паспортной табличке: Работа вне этих пределов приводит к значительному изменению скорости и вызывает перегрев и снижение крутящего момента.
Комбинация 10% изменения напряжения и частоты при условии, что изменение частоты не превышает 5%.
Монтажная поверхность и расположение. Монтажная поверхность должна быть жесткой и соответствовать спецификациям NEMA. Расположение дополнительных кожухов не должно серьезно мешать вентиляции двигателя.
Типы двигателей переменного тока
Введение Двигатели переменного тока
можно разделить на две основные категории — асинхронные и синхронные. Асинхронный двигатель, вероятно, является наиболее распространенным типом асинхронного двигателя (это означает, что скорость зависит от скольжения). При рассмотрении асинхронных двигателей есть два номинальных значения — NEMA и IEC.
Другой тип асинхронного двигателя — двигатель с фазным ротором. Этот тип двигателя имеет регулируемые скорость и крутящий момент благодаря добавлению вторичного сопротивления в цепи ротора.Третий тип популярных асинхронных двигателей — это однофазные двигатели. Однофазные двигатели переменного тока не будут охвачены из-за их ограниченного использования в промышленных приложениях при подключении к частотно-регулируемым приводам.
Синхронный двигатель по своей сути является двигателем с постоянной скоростью, когда он работает напрямую от линии. Этот тип двигателя работает синхронно с частотой сети. Синхронные двигатели двух типов: без возбуждения и с возбуждением постоянным током.
Основные принципы асинхронных двигателей переменного тока были рассмотрены ранее.В этом разделе мы уделим внимание обозначениям, номинальным характеристикам и конструкции двигателей.
Стандартные асинхронные двигатели переменного тока (NEMA и IEC) Двигатели с рамой
NEMA широко используются в промышленности США. Эта конструкция двигателя была разработана до 1950-х годов и хорошо подходит для многих типов приложений с фиксированной скоростью. В 1952 и 1964 годах NEMA провело оценку стандартных размеров рамы и пересмотрело стандарты рамы. Результатом стали моторные рамы меньшего диаметра (например, исходная рама 326 до 1952 года, рама 284U в 1952 году и рама 256T в 1964 году).По мере проведения переоценки размеры (числа) корпуса были уменьшены, как и количество железа в статоре. При меньшем количестве железа в статоре достигается меньшая перегрузочная способность по сравнению с U-образной рамой или исходным размером.
Однако рамы меньшего диаметра обеспечивают большую эффективность и более быструю реакцию на изменения магнитного потока. На Рис. 3-36 показана конструкция стандартного асинхронного двигателя переменного тока. Идентифицированы все основные компоненты двигателя.
Следует отметить, что все стандартные двигатели имеют небольшую прямоугольную прорезь, продольную прорезанную в валу, называемую шпоночным пазом или шпоночным пазом.В этот паз входит прямоугольный кусок стали конической формы, называемый ключом. Шпонка вставляется в шпоночный паз и плотно прижимается для механического соединения вала и муфты или соединительного устройства, такого как шкив или шестерня.
Как видно на рис. 3-36, асинхронный двигатель — довольно простое устройство. Однако для создания небольших допусков и воздушных зазоров, которые позволят добиться максимальной эффективности и выработки крутящего момента, требуется точная инженерия.
Рисунок 3-36. Конструкция асинхронного двигателя переменного тока
Асинхронный двигатель переменного тока (многофазный асинхронный двигатель) можно разделить на пять классификаций в соответствии с NEMA.Характеристики скорости / крутящего момента для каждой классификации были представлены в предыдущем разделе. Здесь будет представлено краткое описание каждой классификации с последующим сравнением с двигателями корпуса IEC.
• NEMA, конструкция A: этот тип двигателя имеет высокий крутящий момент пробоя по сравнению с двигателями NEMA конструкции B. Эти двигатели обычно предназначены для специального использования, с характеристикой скольжения обычно менее 5%.
• NEMA, исполнение B: Этот тип двигателя предназначен для общего использования и составляет наибольшую долю проданных асинхронных двигателей.Типичное скольжение для двигателя конструкции B составляет 3-5% или меньше.
• Исполнение C NEMA: этот тип двигателя имеет высокий пусковой момент, относительно нормальный пусковой ток и низкое скольжение. Тип нагрузки, применяемой к конструкции C, — это нагрузка, при которой отрывные нагрузки высоки при запуске. Однако нагрузки обычно работают при номинальном значении с очень небольшой потребностью в перегрузке.
• Конструкция D NEMA: этот тип двигателя имеет высокий пусковой момент, высокое скольжение, но также низкую скорость при полной нагрузке. Из-за высокого скольжения (513%) скорость может легко колебаться из-за изменений нагрузки.
• NEMA, конструкция E: Этот тип двигателя известен своим высоким КПД и используется в основном там, где требования к пусковому крутящему моменту низкие. Вентиляторы и центробежные насосы составляют основную часть применений, в которых используются двигатели этого типа.
Рисунок 3-37 показывает конструкции NEMA и сравнивает конструкцию с номинальным пусковым током и скоростью.
Как показано на рисунке 3-37, хотя конструкция E может иметь самый высокий КПД, она также имеет самый высокий пусковой ток — около 800%. Этот факт необходимо учитывать при выборе подходящих нагревательных элементов для защиты от перегрузки.Большинство стандартных асинхронных двигателей имеют пусковой ток, близкий к 600%.
Рисунок 3-37. Зависимость тока от скорости для двигателей NEMA
Хотя двигатели NEMA рассчитываются в лошадиных силах, бывают случаи, когда двигатель указывается на основе его типоразмера. NEMA предлагает стандартные обозначения рам вплоть до 445T. Выше этого рейтинга производители двигателей могут предоставить свои собственные стандарты и обозначить номинальные параметры двигателя как превышающие рейтинги NEMA.
Существуют двигатели стандартных размеров, в зависимости от заданной мощности или базовой скорости.NEMA обозначает расстояние от стопы до средней линии как показатель размера рамы. Также имеется обозначение диаметра рамы. На рисунке 3-38 показан асинхронный двигатель переменного тока с указанием типоразмера.
Рисунок 3-38. Обозначение двигателя с рамой 324
На примере двигателя с рамой 324 Т разработчик двигателя определяет расстояние от оси вала до опоры равным 8 дюймам. Чтобы вычислить расстояние от оси вала до опоры, разделите первые две цифры номера рамы на 4 (32 -f- 4 = 8 дюймов).Обладая этой информацией, инженер по применению может спроектировать машину с учетом размеров двигателя. Это также помогает сравнивать один двигатель с двигателем другого производителя. Все размеры двигателя стандартные.
Поскольку размеры двигателя являются стандартными, то же самое относится и к номинальным значениям двигателя, указанным на паспортной табличке. Как и в случае двигателей постоянного тока, паспортные таблички двигателей переменного тока содержат всю необходимую информацию для эффективного использования двигателя. Рисунок 3-39 представляет собой пример типовой паспортной таблички двигателя переменного тока.
Рисунок 3-39. Паспортная табличка электродвигателя переменного тока
• Рама: Показывает номинальную мощность рамы на определенную мощность с учетом номинального напряжения и частоты (пример: рама 256T).
• HP: Доступная мощность в лошадиных силах при указанном номинальном напряжении и частоте.
• Напряжение, фаза и частота: обозначения номинального напряжения, фазы и частоты в герцах. Многие промышленные двигатели рассчитаны на два напряжения. Это означает, что их можно подключать к двум разным линиям напряжения. Рабочее напряжение обозначается либо перемычками, либо конфигурациями проводов, которые укомплектованы в распределительной коробке. Обычно двигатели с рамой NEMA рассчитаны на работу при частоте 60 Гц.
• FL Amps: Номинальный ток двигателя, указанный в амперах.На некоторых паспортных табличках номинальный ток указан как FLA (ток полной нагрузки). Это будет означать, что двигатель будет потреблять указанные значения тока при номинальном напряжении, частоте и нагрузке. Если это двигатель с двойным напряжением, будут указаны два значения ампер. Первое значение будет совпадать с первым заявленным значением напряжения. Второе значение будет совпадать со вторым значением напряжения в списке. (Пример: двигатель 230/460 В может указывать на паспортной табличке ток 68/34 А. Двигатель потребляет в два раза больше тока при подключении 230 В по сравнению с подключением 460 В.)
• об / мин: это скорость двигателя в об / мин при базовой скорости. Базовая скорость обозначается как номинальное напряжение, частота и нагрузка. Из-за меньшего скольжения скорость ненагруженного двигателя повысится с этой скорости до скорости, близкой к синхронной.
• Конструкция и класс изоляции: класс конструкции указывает обозначение NEMA для A, B, C, D или E. Обычно класс изоляции указывает на температурную стойкость изоляции обмотки статора. Например, обычное обозначение изоляции класса B допускает максимальное повышение температуры до 130 ° C (266 ° F).Изоляция класса H допускает повышение температуры до 180 ° C (356 ° F). Повышение температуры означает увеличение температуры выше нормального номинального значения окружающей среды 40 ° C (104 ° F).
В настоящее время к двигателям добавляется дополнительная классификация — это классификация электрической прочности изоляции обмотки статора (относящаяся к диэлектрической прочности). Двигатели переменного тока, применяемые в частотно-регулируемых приводах, подвержены риску возможного повреждения изоляции из-за технологии преобразования энергии в приводе.Напряжение, превышающее допустимое, может вызвать микроскопические отверстия для штифтов в изоляции, что может привести к обрыву фазы и, в конечном итоге, к отказу двигателя. Двигатели, предназначенные для работы с инвертором, обладают прочностью электрической изоляции, чтобы избежать отказа из-за проблем с приводной техникой. Стандарты
NEMA MG-1, часть 31 указывают, что двигатели, работающие от приводов 600 В или менее, должны быть способны выдерживать пиковое напряжение 1600 В. Длина кабеля двигателя и несущая частота привода (переключателя) также играют роль в возможном повреждении прочность изоляции двигателя.Двигатели с изоляцией от 1200 В или 1000 В не следует применять с приводами переменного тока, если не приняты дополнительные меры предосторожности. Специальные выходные фильтры привода уменьшат воздействие высоких пиковых напряжений и снизят риск нарушения изоляции.
При возникновении вопросов относительно прочности изоляции обмоток следует всегда консультироваться с производителем двигателя. Производитель может дать рекомендации относительно дополнительных мер безопасности, которые могут потребоваться для увеличения срока службы двигателя при подключении к приводу.
• Долг и С.Ф. (Коэффициент обслуживания): Большинство стандартных двигателей переменного тока указывают режим работы как «непрерывный» или «прерывистый». Эксплуатационный коэффициент двигателя
— это множитель или дополнительная безопасная силовая нагрузка, превышающая номинальную. Двигатели с малой дробной мощностью могут иметь коэффициент обслуживания 1,4, в то время как двигатели со встроенной мощностью более крупной мощности могут иметь коэффициент обслуживания только 1,15. Например, 1.15 S.F. будет указывать на возможность двигателя на 15% дополнительной выходной мощности выше номинальной. А 1.4 S.F. будет указывать на 40% дополнительной выходной мощности.
• Эффективность и окружающая среда: Многие двигатели могут иметь обозначение повышенной эффективности. Кроме того, можно указать действительное число, например 89,5. Эффективность тесно связана с классификацией NEMA, такой как конструкция A, B, C и т. Д. Производитель двигателя получит рейтинг от независимого агентства по испытаниям. Температура окружающей среды — это максимальная нормальная рабочая температура, ниже значения, указанного в классе температурной изоляции.
Не все двигатели переменного тока содержат все перечисленные выше данные.Но на всех паспортных табличках двигателей будет указана самая важная информация, такая как напряжение, частота, ток и частота вращения. Эта информация требуется приводу переменного тока, чтобы привод мог согласовать внутреннюю диагностику с данными двигателя.
На некоторых паспортных табличках двигателей указана электрическая схема для обмоток с двойным напряжением; у других есть наклейка или этикетка внутри распределительной коробки с указанием проводных соединений. Некоторые из новых двигателей, производимых сегодня, показывают диэлектрическую прочность изоляции или конструкции крепления.
Рейтинги IEC
На этом этапе было бы полезно кратко просмотреть характеристики двигателей IEC, а затем сравнить IEC с NEMA. Сегодня рынок двигателей стал более глобальным, и двигатели с рейтингом IEC на оборудовании, экспортируемом из Европы.
IEC — это аббревиатура Международной электротехнической комиссии. IEC, как и NEMA, устанавливает и публикует механические и электрические стандарты для двигателей. Многие стандарты IEC были национализированы для конкретной страны, например Германии, Великобритании или Франции.
Хотя в стандартах NEMA и IEC используются разные термины, они по сути схожи по номинальным характеристикам и во многих случаях являются взаимозаменяемыми. Стандарты NEMA, вероятно, более консервативны, что позволяет интерпретировать их при проектировании. Стандарты IEC более конкретны и разделены на категории. Обычно они более точны.
И IEC, и NEMA используют буквенные коды для обозначения механических размеров. Они также используют кодовые буквы для обозначения общего размера кадра. Коды размеров NEMA и IEC не являются взаимозаменяемыми, равно как и размеры кадра (исключение составляет кадр 56, который одинаков в NEMA и IEC).
Как и ожидалось, обозначения NEMA указаны в дюймах и лошадиных силах, тогда как обозначения IEC указаны в миллиметрах и киловаттах. NEMA перечисляет несколько обозначений и описаний корпусов, тогда как IEC использует числа.
IEC перечисляет два числа: первое число указывает защиту от твердых предметов; вторая цифра указывает на защиту от попадания воды. Буквы «IP» на корпусе обозначают степень защиты от проникновения. (Пример: IP55. Первая цифра «5» означает полную защиту, включая пыленепроницаемость, а вторая цифра «5» означает защиту от воды, разбрызгиваемой из сопла с любого направления.Этот тип двигателя считается режимом промывки.)
NEMA перечислит тип корпуса, чтобы указать конкретный метод охлаждения, используемый в двигателе. Однако IEC будет использовать буквенно-цифровой код для обозначения способа охлаждения двигателя. (Пример: IC40. «4» обозначает охлаждение корпуса, а «0» обозначает конвекционное охлаждение без вентилятора.) Классы температурной изоляции идентичны, независимо от того,
NEMA или IEC. Двигатели
IEC указаны как «50 Гц», а не как «60 Гц» согласно NEMA.«Двигатель IEC с частотой 50 Гц обычно удовлетворительно работает на частоте 60 Гц, если напряжение увеличивается в той же пропорции, что и частота. (Пример: от 50 Гц при 380 В до 60 Гц при 460 В) Скорость двигателя будет на 1/6 выше, чем при 50 Гц. Однако работа двигателя с частотой 50 Гц при более низком напряжении в США 230 В может не работать удовлетворительно без снижения номинальных характеристик (требуя от двигателя передачи крутящего момента на 15 или 20% меньше номинального значения, указанного на паспортной табличке, из-за нагрева двигателя).
При использовании двигателя IEC вместо двигателя NEMA всегда разумно сверяться с таблицей номинальных характеристик двигателя для сравнения.Рейтинги NEMA включают фактор перегрузки, тогда как IEC строго оценивает двигатели с минимальной перегрузочной способностью или без нее.
Ротор с обмоткой
Характеристики скорости и крутящего момента асинхронного двигателя переменного тока в основном определяются конструкцией, количеством полюсов и подаваемой мощностью от сети. Напротив, версия асинхронного двигателя с фазным ротором действительно имеет регулируемые характеристики скорости и крутящего момента. В цепь ротора вводятся разные значения сопротивления, чтобы получить различные параметры производительности.
Двигатели с фазным ротором обычно запускаются с вторичным сопротивлением, подключенным к цепи ротора. Сопротивление уменьшается, что позволяет двигателю увеличивать скорость. Этот тип двигателя может развивать значительный крутящий момент и в то же время ограничивать ток заблокированного ротора. Вторичное сопротивление может быть рассчитано на непрерывную работу на пониженных скоростях. Особое внимание необходимо уделить отводу тепла на пониженных скоростях из-за пониженного эффекта охлаждения и высоких инерционных нагрузок.На Рис. 3-40 показана электрическая схема двигателя с фазным ротором.
Рисунок 3-40. Схема двигателя с фазным ротором
Преимущества этого типа двигателя заключаются в более низком пусковом токе (менее 600%) при высоком пусковом моменте. Этот тип двигателя также обеспечивает плавное ускорение и простоту управления.
Недостатком этого типа двигателя является низкий КПД. Внешнее сопротивление вызывает большое падение оборотов в минуту из-за небольшого изменения нагрузки. Скорость можно снизить до 50% от номинального значения.Другой недостаток заключается в том, что относительная стоимость этого двигателя может быть значительно выше, чем у эквивалентного трехфазного асинхронного двигателя.
Синхронные двигатели
Трехфазный синхронный двигатель переменного тока — это уникальный и специализированный тип двигателя. Без сложного электронного управления этот тип двигателя по своей сути является двигателем с фиксированной скоростью. Этот тип двигателя используется в приложениях, где важна постоянная скорость. Это также происходит в тех случаях, когда требуется коррекция коэффициента мощности, поскольку он может работать с опережающим или единичным коэффициентом мощности.Синхронный двигатель — это высокоэффективное средство преобразования электрической энергии переменного тока в механическую.
Синхронный двигатель можно рассматривать как трехфазный генератор переменного тока, работающий в обратном направлении. Постоянный ток подается непосредственно на ротор для создания вращающегося электромагнитного поля. Обмотки статора соединены по схеме «звезда» или «треугольник». На рисунке 3-41 показана схема синхронного двигателя.
Следует отметить, что синхронный двигатель имеет «намотанный» ротор, который подключен к системе щеточного узла, подключенной к источнику постоянного тока.В действительности синхронные двигатели практически не имеют пускового момента. Для первоначального запуска двигателя необходимо использовать внешнее устройство.
Для первоначального запуска синхронного двигателя обычно используются такие устройства, как вспомогательный двигатель / генератор постоянного тока или демпферные обмотки. Двигатель сконструирован таким образом, что он будет вращаться с той же скоростью, что и вращающееся поле статора. При синхронной скорости вращения ротора и статора равны, поэтому двигатель не имеет скольжения. При нагрузке на вал скольжение увеличивается и
Рисунок 3-41.Схема синхронного двигателя переменного тока Двигатель
реагирует большим крутящим моментом, что увеличивает скорость обратно до «синхронизма».
Синхронные двигатели с дробным номиналом обычно самовозбуждаются с помощью демпферных обмоток. Синхронные двигатели большой мощности обычно возбуждаются постоянным током с помощью внешнего двигателя / генератора постоянного тока.
Многополюсные двигатели
Многополюсные двигатели можно рассматривать как многоскоростные. Как указывалось ранее, скорость является прямым результатом количества пар полюсов.При 60 Гц четырехполюсный двигатель будет иметь синхронную скорость 1800 об / мин. При тех же 60 Гц двухполюсный двигатель будет иметь двойную синхронную скорость — 3600 об / мин. Обычно асинхронный двигатель переменного тока имеет только один набор пар полюсов — 2, 4, 6 или 8 полюсов или более. Однако специально разработанные многоскоростные двигатели будут намотаны для подключения двух разных пар полюсов.
Большинство многополюсных двигателей будут двухскоростными или двухскоростными. По сути, распределительная коробка будет содержать два набора конфигураций проводки: один для низкоскоростной и один для высокоскоростной обмоток.Обмотки включаются двухпозиционным переключателем или электрическими контактами. Переключатель или контакты будут подключать низкоскоростную или высокоскоростную обмотку к трехфазному источнику питания.
Этот тип конфигурации двигателя обеспечивает определенную гибкость при производстве. Возможно, низкоскоростная обмотка будет использоваться для производственного процесса, происходящего на подающем конвейере. После завершения процесса и закрытия концевого выключателя тот же конвейер будет перемещать продукт на высокой скорости в секцию упаковки и этикетирования.Есть много других применений в промышленности, упаковке, пищевой промышленности и HVAC, где двухскоростные двигатели могут быть преимуществом. Возможным недостатком этого типа двигателя является дополнительная стоимость некоторых типов внешнего управления переключателем.
Специальные двигатели
Общие принципы работы — шаговый
Шаговый двигатель — это двигатель, в котором электрические импульсы преобразуются в механические движения. Например, стандартный двигатель постоянного тока вращается непрерывно; но шаговый двигатель вращается с фиксированными приращениями всякий раз, когда на него подается импульс.Стандартный двигатель постоянного тока будет считаться аналоговым устройством, а шаговый двигатель — цифровым.
Размер шага или угол шага определяется конструкцией двигателя или типом подключенного контроллера. (Примечание: угол шага определяется в долях от 360 °, что составляет один полный оборот вала.) Например, разрешение шага в 90 ° будет составлять четыре шага на оборот (оборот). Разрешение 15 ° означает 12 шагов на оборот, а 1,8 ° означает 200 шагов на оборот.Двигатели Microstep способны совершать тысячи шагов на оборот.
Из-за их точности вращения, шаговые двигатели используются в системах управления с обратной связью, где положение имеет решающее значение. Во многих высокоточных приложениях для подтверждения фактического положения вала двигателя используется энкодер или устройство обратной связи по положению. Для шаговых двигателей
требуется приводной комплект с электронным контроллером, источником питания и устройством обратной связи, если это необходимо. На рис. 3-42 показан принцип конструкции шагового двигателя.
Шаговый двигатель — это двухфазный двигатель. Индексатор подает импульсы шага и направления на контроллер привода (усилитель). Величина тока для каждой фазы определяется контроллером, который затем используется как выход для шагового двигателя. Шаговый двигатель приводится в действие импульсами, которые определяют «шаги» вала двигателя. Частота этих шагов определяет скорость двигателя.
Наиболее распространенными типами шаговых двигателей, вероятно, являются постоянный магнит (PM) и переменное сопротивление (VR).Схема на рисунке 342 представляет собой один из типов шагового двигателя с постоянными магнитами. Его можно рассматривать как конструкцию, аналогичную синхронному асинхронному двигателю.
Ротор движется синхронно с обмотками статора, когда обмотки находятся под напряжением. Если на обмотки постоянно подается питание от двухфазного источника питания, то двигатель будет действовать как низкоскоростной синхронный двигатель. Как видно на рис. 3-42, ротор PM окружен двухфазным статором. Секции ротора смещены на 1/2 шага зуба (180 °) от
Рисунок 3-42.Схема шаговых двигателей ПМ
друг друга. Когда напряжение вращается по часовой стрелке, от фазы A к фазе B, набор магнитов ротора выравнивается с магнитным полем статора. Таким образом, ротор повернется на один шаг. Если по какой-то причине обе фазы запитаны одновременно, ротор займет положение посередине между полюсами статора. Если бы это произошло, двигатель считался бы полушаговым.
Шаговый двигатель типа VR в основном сконструирован так же, как и двигатель с постоянными магнитами.Отличие в том, что у типа VR нет магнитов в роторе. Однако он может содержать 2-, 3- или 4-фазные обмотки статора. Двигатель будет работать аналогично асинхронному двигателю, при этом ротор будет совмещен с полюсом статора, на который подается напряжение.
Шаговый двигатель — это, по сути, бесщеточный двигатель. Он может обеспечивать высокий крутящий момент при нулевой скорости без смещения вала. Направление двигателя можно изменить, изменив направление импульсов с контроллера.Устройство имеет низкую инерцию, как у серводвигателя, благодаря обмоткам статора и ротору с постоянными магнитами.
Шаговые двигатели следует учитывать по нескольким причинам. Периодически, возможно, на низких скоростях, этот тип двигателя демонстрирует колебания на каждом шаге. Это вызвано тем, что полюса ротора ищут следующее доступное магнитное поле. Часто магнитные поля ротора и статора не совпадают, обычно при включении питания. Кроме того, двигатель, контроллер и нагрузка должны быть согласованы, чтобы минимизировать колебания.Шаговые двигатели обычно нагреваются сильнее, чем стандартные асинхронные двигатели. Это происходит из-за формы импульса от контроллера, особенно на низкой скорости
, при наличии высоких уровней тока (результат реакции высокого крутящего момента на низкой скорости).
Двигатели переменного тока Vector
Этот тип двигателя является особым типом, который может быть применен к приводу с вектором переменного тока или с векторным магнитным потоком. Принцип работы этого двигателя в основном идентичен стандартному асинхронному двигателю переменного тока. Поскольку этот двигатель работает от привода с векторным магнитным потоком, требуются особые конструктивные характеристики.
Векторное управление в основном означает требование полного крутящего момента при нулевой скорости. В таких приложениях, как лифты, подъемники и лыжные подъемники, двигатель обычно запускается при номинальной нагрузке. Если устройство представляет собой кабину лифта, положение устройства не может измениться при запуске двигателя. Если бы использовался стандартный асинхронный двигатель, ему пришлось бы «проскальзывать», чтобы развить крутящий момент. В процессе развития «пробуксовки мотора» кабина лифта могла упасть на несколько футов, прежде чем мотор смог развить достаточный крутящий момент, чтобы переместить ее вверх.Векторный двигатель специально разработан для работы с чрезвычайно низким скольжением и способен справляться с выделением тепла, обеспечивая полный крутящий момент при нулевой скорости.
Общий принцип работы заключается в анализе двигателя с точки зрения векторов напряжения и магнитного потока. Ротор делится на 360 ° вращения, что составляет один полный оборот. Вектор — это направление и количество определенной величины в цепи двигателя — в данном случае магнитного потока ротора или статора. Соотношение между магнитным потоком ротора и статора показано на рисунке 3-43.
Рисунок 3-43. Взаимосвязь вектора двигателя — поток статора и ротора
Крутящий момент в асинхронном двигателе определяется соотношением магнитного потока ротора и статора. Создаваемый физический крутящий момент является побочным продуктом величины векторов магнитного потока статора и ротора. Поток статора зависит от входного напряжения двигателя. (Векторы напряжения обозначены на рисунке буквами от U1 до U6.) Мы могли бы рассмотреть пунктирную кривую, устанавливающую диапазон крутящего момента
, развиваемый в двигателе. Устройство, которое будет контролировать количество генерируемого статора и потока ротора, будет считаться приводом переменного тока с векторным или векторным потоком.
Векторный двигатель в большинстве случаев должен иметь приспособления для установки устройства обратной связи на конце вала. Устройство обратной связи (энкодер или резольвер) отправляет информацию обратно в систему управления приводом, указывая, где именно находится положение ротора. Эта информация нужна системе управления приводом для расчета и генерации В / Гц. Затем форма волны В / Гц используется двигателем для генерации векторов магнитного потока, показанных на рисунке.
Устройства векторного управления, управления приводом и обратной связи обсуждаются в теме 4 (раздел «Приводы переменного тока») и теме 5 (раздел «Управление по замкнутому контуру»).Сегодня этот тип технологий определенно пользуется большим спросом во всей отрасли. Использование векторного управления двигателем (управление крутящим моментом) позволяет производственным системам повысить точность и производительность. Базовая конструкция асинхронного двигателя переменного тока не сильно изменилась за последние несколько десятилетий. Магнетизм — это магнетизм. Однако сейчас рейтинги более точны, чем несколько десятилетий назад. Эффективность определенно выше, чем несколько десятилетий назад. Есть производители приводов переменного тока, которым требуется комбинация привода с вектором магнитного потока и двигателя — согласованного набора.Тем не менее, отраслевое направление заключается в том, чтобы иметь возможность использовать комбинацию оборудования поставщиков для достижения желаемых результатов.
Двигатель однофазный с коротким замыканием. Однофазные асинхронные двигатели. Устройство и принцип работы
Простота преобразования переменного напряжения сделала его наиболее широко используемым в источниках питания. В области конструирования электродвигателей было обнаружено еще одно преимущество переменного тока: возможность создания вращающегося магнитного поля без дополнительных преобразований или с их минимальной величиной.
Таким образом, даже несмотря на определенные потери из-за реактивного (индуктивного) сопротивления обмоток, простота создания электродвигателей переменного тока способствовала победе над источниками постоянного тока в начале 20 века.
В принципе двигатели переменного тока можно разделить на две группы:
Асинхронные
В них скорость вращения ротора отличается от скорости вращения магнитного поля, поэтому они могут работать с разными скоростями.Этот тип электродвигателей переменного тока наиболее распространен в наше время. Синхронный
Эти двигатели имеют жесткую зависимость между частотой вращения ротора и скоростью вращения магнитного поля. Они более сложны в изготовлении и менее гибки в применении (изменение скорости при фиксированной частоте питающей сети возможно только путем изменения числа полюсов статора).
Они находят применение только при больших мощностях в несколько сотен киловатт, где их больший КПД по сравнению с асинхронными электродвигателями значительно снижает тепловые потери.
ИНДУКЦИОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПЕРЕМЕННОГО ТОКА
Самый распространенный тип асинхронного двигателя — это электродвигатель с короткозамкнутым ротором, у которого в наклонных пазах ротора с концов, соединенных кольцами, уложен набор токопроводящих стержней.
История этого типа электродвигателей насчитывает более ста лет, когда было обнаружено, что проводящий объект, помещенный в зазор сердечника электромагнита переменного тока, стремится вырваться из него из-за возникновения индукции ЭДС с встречно направленный вектор.
Таким образом, асинхронный двигатель с короткозамкнутым ротором не имеет никаких механически контактирующих компонентов, кроме подшипников ротора, что обеспечивает этот тип двигателя не только низкой ценой, но и высочайшей долговечностью. Благодаря этому электродвигатели этого типа получили наибольшее распространение в современной промышленности.
Однако у них есть определенные недостатки, которые необходимо учитывать при проектировании асинхронных электродвигателей этого типа:
Большой пусковой ток — поскольку в момент включения асинхронного бесщеточного электродвигателя реактивное сопротивление статора на обмотку по-прежнему не действует магнитное поле, создаваемое ротором, возникает сильный скачок тока, в несколько раз превышающий номинальный ток потребления.
Эта особенность работы двигателей данного типа должна быть заложена во все проектируемые источники питания во избежание перегрузок, особенно при подключении асинхронных электродвигателей к мобильным генераторам с ограниченной мощностью.
Низкий пусковой момент — электродвигатели с короткозамкнутой обмоткой имеют ярко выраженную зависимость момента от оборотов, поэтому включение их под нагрузкой крайне нежелательно: время выхода на номинальный режим и пусковые токи значительно увеличиваются, обмотка статора перегружен.
Например, это происходит при включении глубинных насосов — в электрических цепях их питания нужно учитывать пяти-семикратный запас по току.
Невозможность прямого пуска в однофазных цепях тока — чтобы ротор начал вращаться, необходимо запустить толчковый режим или ввести дополнительные фазные обмотки, сдвинутые по фазе относительно друг друга.
Для пуска асинхронного двигателя переменного тока в однофазной сети либо вручную отключают пусковую обмотку после раскрутки ротора, либо включают вторую обмотку через фазовращающий элемент (чаще всего конденсатор необходимой емкости) .
Нет возможности получения высокой скорости — Хотя вращение ротора не синхронизировано со скоростью вращения магнитного поля статора, оно не может превзойти ее, поэтому в сети 50 Гц максимальные обороты для асинхронного двигателя с белкой обоймы ротора не более 3000 об / мин.
Увеличение скорости асинхронного двигателя требует использования преобразователя частоты (инвертора), что делает такую систему более дорогой, чем коллекторный двигатель. Кроме того, с увеличением частоты возрастают реактивные потери.
Сложность организации реверса — Это требует полной остановки двигателя и перегруппировки фаз, в однофазном варианте — смещения фаз в пусковой или второй фазной обмотке.
Наиболее удобно использование асинхронного электродвигателя в промышленной трехфазной сети, так как создание вращающегося магнитного поля осуществляется самими фазными обмотками без дополнительных устройств.
Фактически, цепь, состоящая из трехфазного генератора и электродвигателя, может рассматриваться как пример электрической передачи: привод генератора создает в ней вращающееся магнитное поле, которое преобразуется в колебания электрического тока, который в свою очередь приводит во вращение магнитное поле в двигателе.
Кроме того, именно при трехфазном питании асинхронные двигатели имеют наибольший КПД, так как в однофазной сети магнитное поле, создаваемое статором, фактически может быть разложено на два противофазных поля, что увеличивает бесполезные потери. по насыщенности сердечника. Поэтому мощные однофазные электродвигатели обычно выполняются по коллекторной схеме.
КОЛЛЕКТОР ЭЛЕКТРОДВИГАТЕЛЯ
В электродвигателях этого типа магнитное поле ротора создается фазными обмотками, подключенными к коллектору.Собственно, коллектор двигателя переменного тока отличается от двигателя постоянного тока только тем, что в его расчет входит реактивное сопротивление обмоток.
В некоторых случаях создаются даже типовые коллекторные двигатели, в которых обмотка статора имеет ответвление от неполной части для подключения к сети переменного тока, а источник тока может быть подключен на всю длину обмотки.
Преимущества этого типа двигателя очевидны:
Возможность работы на высоких оборотах позволяет создавать коллекторные электродвигатели со скоростью до нескольких десятков тысяч оборотов в минуту, знакомые всем по электродрели.
Нет необходимости в дополнительных триггерах в отличие от двигателей с короткозамкнутым ротором.
Высокий пусковой момент, ускоряющий выход на рабочий режим, в том числе под нагрузкой. Более того, крутящий момент коллекторного двигателя обратно пропорционален оборотам, и когда нагрузка увеличивается, это позволяет избежать снижения скорости вращения.
Легкость регулирования скорости — поскольку они зависят от напряжения питания, достаточно иметь простейший симисторный стабилизатор напряжения, чтобы регулировать скорость вращения в самых широких пределах.При выходе из строя регулятора коллекторный двигатель можно подключить напрямую к сети.
Меньше инерционность ротора — его можно сделать намного компактнее, чем при коротком замыкании, так что сам коллекторный двигатель станет заметно меньше.
Также коллекторный двигатель можно элементарно реверсировать, что особенно важно при создании разнообразных электроинструментов и ряда станков.
По этим причинам коллекторные двигатели широко распространены у всех однофазных потребителей, где необходимо гибкое регулирование скорости: в ручных электроинструментах, пылесосах, кухонных приборах и т. Д.Однако ряд конструктивных особенностей определяют специфику работы коллекторного двигателя:
Коллекторные двигатели требуют регулярной замены щеток, которые со временем изнашиваются. Изнашивается и сам коллектор, а вот мотор с короткозамкнутым ротором, как уже говорилось выше, при нечастой замене подшипников практически вечен.
Неизбежное искрение между коллектором и щетками (причина появления привычного запаха озона при работе двигателя коллектора) не только дополнительно снижает ресурс, но и требует повышенных мер безопасности при эксплуатации из-за вероятности возгорание горючих газов или пыли.
© 2012-2017 г. Все права защищены.
Все материалы на сайте носят исключительно информационный характер и не могут быть использованы в качестве руководящих и нормативных документов.
Электродвигатель однофазный 220В — это отдельный механизм, который широко используется для установки в различные устройства. Его можно использовать в бытовых и промышленных целях. Питание электродвигателя осуществляется от обычной розетки, где обязательно есть мощность не менее 220 вольт. Стоит обратить внимание на частоту 60 герц.
На практике доказано, что однофазный двигатель 220 В продается вместе с устройствами, которые помогают преобразовывать энергию электрического поля , а также накапливают необходимый заряд с помощью конденсатора. Современные модели, которые изготавливаются по инновационным технологиям, электродвигатели 220В дополнительно оснащаются оборудованием для освещения рабочего места устройства. Это касается внутренних и внешних частей.
Важно помнить, что емкость конденсатора должна сохраняться с соблюдением всех основных требований.Оптимальный вариант — это место, где температура воздуха остается неизменной и не подвержена никаким колебаниям. В помещении не следует понижать температурный режим до минусового значения.
Во время эксплуатации двигателя специалисты рекомендуют время от времени измерять емкость конденсатора.
Асинхронные двигатели сейчас широко используются в различных производственных процессах. Для разных приводов используется данная модель электродвигателя. Однофазные асинхронные конструкции служат для привода деревообрабатывающих станков, насосов, компрессоров, промышленных вентиляционных устройств, конвейеров, лифтов и многого другого оборудования.
Электродвигатель также используется для привода малой механизации. Сюда входят измельчители кормов и бетономешалки. Покупайте эти конструкции только у проверенных поставщиков. Перед приобретением желательно проверить сертификаты соответствия и гарантию производителя.
Поставщики должны предоставить своим клиентам обслуживание электродвигателя в случае поломки или поломки. Это одна из основных составляющих, которая завершается при сборке насосного агрегата.
Существующие серии электродвигателей
Сегодня промышленные предприятия выпускают однофазные электродвигатели 220В следующих серий:
Абсолютно все двигатели подразделяются на конструкцию , способ установки, а также степень защиты. Это позволяет защитить конструкцию от влаги или механических частиц.
Характеристики электродвигателей серии А
Электродвигатели однофазные серии А — унифицированные асинхронные исполнения.Они закрываются от внешних воздействий посредством короткозамкнутого ротора.
В конструкции двигателя имеются следующие группы исполнения:
Стоимость однофазного мотора 220В зависит от серии.
Какие бывают типы двигателей?
Двигатели однофазные предназначены для комплектования электроприводов бытового и промышленного назначения. Такие конструкции изготавливаются в соответствии с государственными стандартами.
Области использования. Асинхронные двигатели малой мощности (15-600 Вт) используются в автоматических устройствах и электроприборах для привода вентиляторов, насосов и другого оборудования, не требующего регулирования скорости.В электроприборах и автоматах обычно используются однофазные микродвигатели, так как эти устройства и устройства обычно питаются от однофазной сети переменного тока.
Принцип работы и устройство однофазного двигателя. Обмотка статора однофазного двигателя (рис. 4.60, а) расположена в канавках, которые занимают примерно две трети окружности статора, что соответствует паре полюсов. В итоге
(см. Главу 3), распределение MDS и индукции в воздушном зазоре близко к синусоидальному.Поскольку переменный ток проходит через обмотку, MDS пульсирует с частотой сети во времени. Индукция в произвольной точке воздушного зазора
дюймов x = дюймов м sinωtcos (πx / τ) .
Таким образом, в однофазном двигателе обмотка статора создает стационарный поток, который изменяется со временем, а не круговой вращающийся поток, как в трехфазных двигателях с симметричной мощностью.
Для упрощения анализа свойств однофазного двигателя представим (4.99) в виде
При x = 0,5 В sin (ωt — πx / τ) + 0,5 В sin (ωt + πx / τ), .
, то есть мы заменяем фиксированный пульсирующий поток суммой одинаковых круговых полей, вращающихся в противоположных направлениях и имеющих одинаковые частоты вращения: n 1pr = n 1ob = n 1. Поскольку свойства асинхронного двигателя с вращающимся круговым полем подробно рассматриваются в § 4.7 — 4.12, анализ свойств однофазного двигателя может быть сведен к рассмотрению совместного действия каждого из вращающихся полей.Другими словами, однофазный двигатель можно представить в виде двух одинаковых двигателей, роторы которых жестко связаны (рис. 4.60, б), с противоположным направлением вращения магнитных полей и создаваемых ими моментов. М пр и М обр. Поле, направление вращения которого совпадает с направлением вращения ротора, называется прямым; поле обратного направления — обратное или обратное.
Предположим, что направление вращения роторов совпадает с направлением одного из вращающихся полей, например с n пр.Затем скольжение ротора относительно потока F и т. Д.
с pr = (n 1pr — n 2) / n 1pr = (n 1 — n 2) / n 1 = 1 — n 2 / n 1. .
Скольжение ротора относительно потока
s ob = (n 1obr + n 2) / n 1obr = (n 1 + n 2) / n 1 = 1 + n 2 / n 1. 9 1036.
Из (4.100) и (4.101) следует, что
с o6p = 1 + n 2 / n 1 = 2 — с пр. .
Электромагнитные моменты M пр и M обр, образованные прямым и обратным полями, направлены в противоположные стороны, и результирующий момент однофазного двигателя M Разрез равен разности моментов при одинаковая частота вращения ротора.
На рис. 4.61 приведена зависимость M = f (s) для однофазного двигателя. Рассматривая чертеж, можно сделать следующие выводы:
а) однофазный двигатель не имеет пускового момента; он вращается в том направлении, в котором его приводит в движение внешняя сила; б) частота вращения однофазного двигателя на холостом ходу меньше, чем у трехфазного двигателя, из-за тормозного момента, создаваемого возвратным полем;
в) характеристики однофазного двигателя хуже, чем у трехфазного; имеет повышенное скольжение при номинальной нагрузке, меньший КПД, меньшую перегрузочную способность, что также объясняется наличием обратного поля;
г) мощность однофазного двигателя составляет примерно 2/3 мощности трехфазного двигателя того же типоразмера, так как в однофазном двигателе рабочая обмотка занимает только 2/3 пазов статора.Заполнить все канавки статора
из-за небольшого коэффициента намотки расход меди увеличивается примерно в 1,5 раза, а мощность увеличивается только на 12%.
Пусковые устройства. Для получения пускового момента однофазные двигатели имеют пусковую обмотку, смещенную на 90 электрических градусов относительно основной рабочей обмотки. На период пуска пусковая обмотка подключается к сети через фазосдвигающие элементы — емкость или активное сопротивление.После окончания разгона двигателя пусковая обмотка отключается, при этом двигатель продолжает работать как однофазная обмотка. Поскольку пусковая обмотка работает непродолжительное время, она сделана из провода с меньшим сечением, чем рабочая, и набита в меньшее количество канавок.
Рассмотрим подробнее процесс пуска при использовании в качестве фазовращающего элемента емкости С (рис. 4.62, а). На пусковой обмотке P напряжение
дюйм = Ú
1–9 1035 Ú
С = Ú
1 + jÍ 1 P X C , т.е.е., оно сдвинуто по фазе относительно сетевого напряжения U 1, приложенного к рабочей обмотке R . Следовательно, векторы тока в рабочих I 1p и пусковых I In обмотках сдвинуты по фазе на некоторый угол. Выбирая определенным образом емкость фазосдвигающего конденсатора, можно получить пусковой режим, близкий к симметричному (рис. 4.62, б), т. Е. Получить круговое вращающееся поле. На рис. 4.62 в представленных зависимостях M = f (s) для двигателя с включенным (1) и выключенной пусковой обмоткой (кривая 2).Запуск двигателя осуществляется по детали ab Характеристики 1; в точке b отключается пусковая обмотка, и в дальнейшем двигатель работает на части cO характеристики 2.
Поскольку включение второй обмотки значительно улучшает механические характеристики двигателя, в некоторых случаях используются однофазные двигатели, у которых обмотки А и В
включены постоянно (рис. 4.63, а). Такие двигатели называют конденсаторными.
Обе обмотки конденсаторных двигателей, как правило, занимают одинаковое количество канавок и имеют одинаковую мощность. Когда конденсаторный двигатель запускается для увеличения пускового момента, рекомендуется иметь увеличенную емкость C p + C n. После разгона двигателя в соответствии с характеристикой 2 (рисунок 4.63, б) и уменьшения тока некоторые конденсаторы Cn отключаются, так что при номинальном режиме работы (когда ток двигателя становится меньше, чем при пуске), увеличивается емкостное сопротивление и обеспечить работу двигателя в условиях, близких к работе при круговом вращающемся поле.В этом случае двигатель работает на характеристике 1.
Конденсаторный двигатель имеет высокий cos φ. Недостатками его являются относительно большая масса и габариты конденсатора, а также появление несинусоидального тока с искажениями питающего напряжения, что в некоторых случаях приводит к пагубному воздействию на линию связи.
При легких пусковых условиях (небольшой момент нагрузки в период пуска) пускают двигатели R (рисунок 4.64, а).Наличие активного сопротивления в цепи пусковой обмотки обеспечивает меньший сдвиг фаз φ n между напряжением и током в этой обмотке (рис. 4.64, б), чем сдвиг фаз φ p в рабочей обмотке. В связи с этим токи в рабочей и пусковой обмотках оказываются сдвинутыми по фазе на угол φ p — φ n и образуют несимметричное (эллиптическое) вращающееся поле, за счет которого возникает пусковой момент. Двигатели с пусковым сопротивлением надежны в эксплуатации, выпускаются серийно.Пусковое сопротивление встроено в корпус двигателя и охлаждается тем же воздухом, который охлаждает весь двигатель.
Однофазные микродвигатели с экранированными полюсами. В этих двигателях обмотка статора, соединенная с сеткой, обычно сосредоточена и усилена на четко выраженных полюсах (рис. 4.65, а), листы которых штампуются вместе со статором. На каждом полюсе один из наконечников покрыт вспомогательной обмоткой, состоящей из одного или нескольких короткозамкнутых витков, которые экранируют от 1/5 до 1/2 полюсов.Ротор двигателя короткозамкнутый обычного типа.
Магнитный поток машины, создаваемый обмоткой статора (ток полюса), можно представить как сумму двух составляющих (рис. 4.65, б), где n — поток, проходящий через часть полюса, не покрытую коротким замыканием. -замкнутая катушка; Ф n2 — поток, проходящий через часть полюса, экранированную короткозамкнутым витком.
Потоки Ф п1 и Ф n2 проходят через разные части полюсного наконечника, то есть смещены в пространстве на угол β.Кроме того, они сдвинуты по фазе относительно обмоток статора MDS F n под разными углами — γ 1 и γ 2. Это объясняется тем, что каждый полюс описываемого двигателя можно рассматривать в первом приближении как трансформатор, первичная обмотка которого является обмоткой статора, а вторичная обмотка — короткозамкнутой обмоткой. Обтекание обмотки статора вызывает короткое замыкание ЭДС E на (рисунок 4.65, c), в результате чего возникает ток I to и MDS F to, развивающийся с MDS F. н обмотки статора.Реактивная составляющая тока I k уменьшает поток Φ n2, а активная смещает его по фазе относительно MDS F и т. Д. Поскольку поток Ф п1 не включает короткозамкнутый виток, угол γ 1 имеет относительно небольшая величина (4-9 °) — примерно такая же, как фазовый угол между током трансформатора и МДС первичной обмотки в режиме холостого хода. Угол γ 2 намного больше (около 45 °), т.е. как в трансформаторе со вторичной обмоткой, закороченной (например, в трансформаторе измерения тока).Это объясняется тем, что потери мощности, от которых зависит угол γ 2, определяются не только магнитными потерями мощности в стали, но и электрическими потерями в короткозамкнутой катушке.
Рис. 4.65. Расчетные схемы однофазного двигателя с экранированными полюсами и его векторная диаграмма
:
1
— статор; 2 —
обмотка статора; 3 —
шприц
катушка; 4 —
Ротор ; 5
— полюс
Потоки Ф п1 и Ф n2, смещенные в пространстве на угол β и сдвинутые по фазе во времени на угол γ = γ 2 — γ 1, образуют эллиптическое вращающееся магнитное поле (см. Главу 3), компенсирующее вращательный момент воздействуя на ротор двигателя в направлении от первого полюсного наконечника, не охваченного короткозамкнутым витком, ко второму наконечнику (в соответствии с чередованием максимумов «фазовых» потоков).
Для увеличения пускового момента рассматриваемого двигателя за счет приближения его вращающего поля к круговому применяют различные методы: между полюсными наконечниками соседних полюсов, магнитные шунты, усиливающие магнитную связь между основной обмоткой и закороченным витком. и улучшить форму магнитного поля в воздушном зазоре; увеличить воздушный зазор под наконечником, не перекрытый короткозамкнутым витком; используйте два или более короткозамкнутых витка на одном наконечнике с разными углами охвата.Есть также двигатели без короткозамкнутых витков на полюсах, но с асимметричной магнитной системой: различные конфигурации отдельных частей полюса и разные воздушные зазоры. Такие двигатели имеют меньший пусковой момент, чем двигатели с экранированными полюсами, но их КПД выше, так как у них нет потерь мощности в короткозамкнутых витках.
Рассмотренные конструкции двигателей с экранированными полюсами нереверсивны. Для реализации реверса в таких двигателях вместо короткозамкнутых катушек используются катушки В1, В2, В3 и АТ 4 (рисунок 4.65, на ), каждая из которых охватывает половину полюса. Замыкнув пару катушек IN 1 и AT 4 или AT 2 и AT 3 , можно экранировать одну или другую половину полюса и тем самым изменить направление вращения магнитного поля и ротор.
Двигатель с экранированными полюсами имеет ряд существенных недостатков: относительно большие габаритные размеры и масса; низкий cos φ ≈ 0,4 ÷ 0,6; низкий КПД η = 0,25 ÷ 0,4 из-за больших потерь в короткозамкнутой катушке; малый пусковой момент и др.Достоинства двигателя — простота конструкции и, следовательно, высокая надежность в эксплуатации. Из-за отсутствия зубцов на статоре шум двигателя незначительный, поэтому его часто используют в устройствах для воспроизведения музыки и речи.
3-7. УСТРОЙСТВО АСИНХРОННЫХ ОДНОФАЗНЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
На рис. 3-16 показано устройство асинхронного однофазного двигателя типа АОЛБ со встроенным пусковым резистором. Статор электродвигателя собран из штампованных листов электротехнической стали 15, спрессован и залит в алюминиевый корпус (корпус статора) с двойными стенками 13.Между стенками образованы каналы для воздушного охлаждения поверхности статора. На заточку корпуса статора ставятся две крышки 2 и 17, отлитые из алюминиевого сплава.
Передняя крышка 17 снабжена штампованной крышкой 18 с отверстиями на торце. Через эти отверстия при вращении ротора вентилятор 19, установленный на конце вала ротора, забирает воздух. Вентилятор отлит из алюминиевого сплава и крепится к валу винтом.
В листах статора выбито 24 паза грушевидной формы.Из них 16 пазов заняты проводам рабочей обмотки, а 8 пазов — проводам пусковой обмотки. Выводные концы рабочей и пусковой обмоток выведены на контактные винты 4, расположенные в клеммной коробке 11. Сердечник ротора собран из листов электротехнической стали 12 и прижат к гофрированной поверхности средней части вала 1. алюминиевая обмотка 14 с замыкающими кольцами и лопастями вентилятора заделана в пазы ротора. Назначение вентилятора — отводить нагретый воздух к охлаждаемым внешним стенкам корпуса.
Центробежный выключатель пусковой обмотки установлен на роторе. Он состоит из двух рычагов 7 с противовесами 9, установленных на осях 8, которые прижаты к четырем лопастям вентилятора. Рычаги прижимаются пальцами 6 к пластмассовой втулке 5, свободно сидящей на валу. При разгоне ротора, когда частота его вращения приближается к номинальной, противовесы расходятся под действием центробежной силы, поворачивая рычаги вокруг осей.
В этом случае втулка 5 перемещается вправо, сжимая пружину 10, и освобождает контакт пружины 4, замыкающий цепь пусковой обмотки.Этот контакт с неподвижным ротором замыкается концом втулки с неподвижным контактом 3.
Подвижный и неподвижный контакты закреплены на изоляционной пластине к задней крышке электродвигателя 2. На ней закреплено тепловое реле, отключающее электродвигатель от сети при его перегреве. Стенд 16 с четырьмя шпильками служит для крепления двигателя.
Схема включения электродвигателя представлена на рис. 3-17.
Напряжение питания подается на клеммы C 1 и C 2.С этих выводов напряжение подается на рабочую обмотку через контакты теплового реле РТ, состоящего из обмотки, биметаллической пластины и контактов. При нагреве мотора выше допустимой пластины контакты загибаются и размыкаются. При коротком замыкании обмотки теплового реле будет протекать большой ток, пластина будет быстро нагреваться и размыкать контакты. В этом случае рабочая C и пусковая P обмотки будут обесточены, так как обе запитаны через тепловое реле.Таким образом, тепловое реле защищает двигатель как от перегрузки, так и от короткого замыкания.
Пусковая обмотка запитана от выводов С 1 и С 2 через перемычку С 2 -P 1, контакты центробежного выключателя VC, перемычку VC-RT, контакты теплового реле PT. При запуске двигателя, когда ротор достигает скорости 70-80% от номинальной, контакты центробежного выключателя размыкаются и пусковая обмотка отключается от сети. При включении электродвигателя, когда частота вращения ротора уменьшается, контакты центробежного переключателя снова замыкаются и пусковая обмотка будет готова к следующему пуску.
На рис. 3-18 показана конструкция асинхронного электродвигателя типа АВЕ. Эти двигатели подключены к сети с постоянно включенной вспомогательной обмоткой, цепь которой последовательно соединена с конденсатором (рисунки 3-9). Электродвигатели типа ABE не имеют твердого тела и поэтому называются встраиваемыми. С приводным механизмом моторы крепятся фланцем или кронштейном.
Корпус электродвигателя представляет собой пакет сердечника статора 1, который собран из листов электротехнической стали 0.Толщиной 5 мм. Пакет запрессован и герметизирован алюминиевым сплавом. На концах статора расположены нажимные кольца 5 и четыре алюминиевых стержня, стягивающие их вместе. Катушки 6 рабочей и вспомогательной обмоток заделаны в пазы статора. На нажимных кольцах 5, подшипниковых щитках 4 и 7. Через резиновую втулку 9 в подшипниковом щите концы обмоток 8 выводятся для выхода в сеть. Щиты подшипников стянуты четырьмя шпильками.
Ротор электродвигателя собран из листов электротехнической стали и покрыт алюминием 2. Наряду с обмоткой ротора отформованы крылья вентилятора для охлаждения электродвигателя. Ротор вращается в двух шарикоподшипниках 3.
Электродвигатели имеют буквенно-цифровые и цифровые обозначения типа, например электродвигатель ABE 041-2 расшифровывается следующим образом: А — асинхронный, В — встроенный, Е — однофазный,
4 — номер оболочки, 1 — порядковый номер длины сердечника статора и цифра 2 через тире — количество полюсов.
3-8. СИНХРОННЫЕ ОДНОФАЗНЫЕ ЭЛЕКТРОДВИГАТЕЛИ
В некоторых случаях требуются электродвигатели, скорость вращения которых должна быть строго постоянной независимо от нагрузки. В качестве таковых используются синхронные двигатели, в которых частота вращения ротора всегда равна частоте вращения магнитного поля и определяется из (3-2). Существует много типов синхронных двигателей как для трехфазного, так и для однофазного тока. Здесь мы рассматриваем только два самых простых типа однофазных синхронных двигателей: реактивный и конденсаторный реактивный.
На рис. 3-19 показана схематическая диаграмма простейшего однофазного реактивного двигателя, известного в данной области техники, называемого колесом La Cura. Статор 1 и ротор 2 собраны из экструдированных листов электротехнической стали. Катушка, питаемая от однофазной сети переменного тока, намотана на статор, создавая пульсирующее магнитное поле. Название реактивного двигателя связано с тем, что ротор вращается за счет реакций двух сил магнитного притяжения.
При пульсирующем поле двигатель не имеет пускового момента и должен раскручиваться вручную.Магнитные силы, действующие на зубья ротора, всегда стремятся разместить его напротив полюсов статора, поскольку в этом положении сопротивление магнитному потоку будет минимальным. Однако ротор по инерции проходит это положение в то время, когда пульсирующее поле уменьшается. При следующем увеличении магнитного поля магнитные силы действуют на другой зубец ротора, и его вращение продолжится. Для стабильности хода ротор реактивного двигателя должен иметь большую инерцию.
Реактивные двигатели стабильно работают только на небольшой скорости около 100-200 об / мин. Их мощность обычно не превышает 10-15 Вт. Частота ротора определяется частотой питающей сети f и числом зубьев ротора Z. Поскольку за один полупериод изменения магнитного потока ротор вращается на 1 / Z оборота, то в За 1 минуту, содержащую 60 полупериодов 2 f, он повернется на 60 оборотов 2 f / Z. При частоте переменного тока 50 Гц частота вращения ротора составляет:
Для увеличения крутящего момента увеличьте количество зубцов на статоре.Наибольшего эффекта можно добиться, сделав на статоре столько же зубцов, сколько на роторе. В этом случае магнитное притяжение будет действовать одновременно не на пару зубцов, а на все зубья ротора, и крутящий момент значительно возрастет. В таких двигателях обмотка статора состоит из небольших катушек, намотанных на обод статора между зубьями. В электрических регистраторах старых типов применялся электродвигатель с 77 зубьями на статоре и роторе, обеспечивающий скорость вращения диска 78 об / мин.Ротор находился заодно с диском, на котором размещалась пластина. Для запуска электродвигателя необходимо было нажать пальцем на диск.
Статор синхронного конденсаторного реактивного двигателя ничем не отличается от статора конденсаторного асинхронного электродвигателя. Ротор электродвигателя можно изготовить из ротора асинхронного электродвигателя, выполнив в нем пазы по количеству полюсов (рисунки 3-20). При этом у беличьей клетки частично срезаются стержни.При изготовлении таких электродвигателей с листами ротора штампованными с выступами полюсов часть стержней с короткозамкнутым ротором играет роль пусковой обмотки. Ротор начинает вращаться так же, как ротор асинхронного электродвигателя, затем он втягивается синхронно с магнитным полем, а затем вращается с синхронной частотой.
Качество работы конденсаторного двигателя сильно зависит от рабочего режима, в котором электродвигатель имеет круговое вращающееся поле.Эллиптичность поля в синхронном режиме приводит к увеличению шума, вибраций и нарушению равномерности вращения. Если круговое вращающееся поле возникает в асинхронном режиме, двигатель имеет хороший пусковой момент, но небольшие моменты входа и выхода из синхронизма. Когда круговое поле смещается в сторону более высоких частот, пусковой крутящий момент уменьшается, а время входа и выхода синхронизма увеличивается. Наибольшие моменты входа и выхода из синхронизма получаются в том случае, когда круговое вращающееся поле имеет место в синхронном режиме.Однако в этом случае пусковой момент значительно снижается. Для его увеличения обычно несколько повышают сопротивление короткозамкнутой обмотки ротора.
Недостатком некоторых типов конденсаторных реактивных двигателей является заедание ротора, заключающееся в том, что при запуске ротор не вращается, а останавливается в любом положении.
Обычно заедание ротора проявляется в двигателях с неудачным соотношением размеров впадин и выступов полюсов.Наибольший реактивный момент при небольшой мощности, потребляемой электродвигателем, получается, когда отношение полюсной дуги bn к делению полюсов t составляет примерно 0,5-0,6, а глубина желобов h в 9-10 раз больше, чем у воздуха. зазор между полюсными выступами и статором.
Положительным свойством конденсаторных реактивных двигателей является высокий коэффициент мощности, который значительно выше, чем у трехфазных электродвигателей, и иногда достигает 0,9-0,95. Это связано с тем, что индуктивность конденсаторного двигателя в значительной степени компенсируется емкостью конденсатора.
Синхронные реактивные двигатели являются наиболее распространенными синхронными двигателями благодаря простоте конструкции, невысокой стоимости и отсутствию скользящих контактов. Они нашли применение в схемах синхронной связи, в установках звукового кино, звукозаписи и телевидения.
3-9. ИСПОЛЬЗОВАНИЕ ТРЕХФАЗНЫХ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ КАК ОДНОФАЗНЫЕ
На практике встречаются случаи, когда трехфазный электродвигатель необходимо подключать к однофазной сети.Ранее считалось, что для этого требуется перемотка статора электродвигателя. В настоящее время разработано и испытано на практике множество схем включения трехфазных электродвигателей в однофазную сеть без изменения обмоток статора.
Конденсаторы используются как пусковые элементы.
Выводы обмотки статора трехфазного электродвигателя имеют следующие обозначения: С1 — начало первой фазы; C2 — начало второй фазы; СЗ-начало третьей фазы; С4 — окончание первой фазы; C5 — конец второй фазы; C6 — конец третьей фазы.Эти обозначения проштампованы на металлических бирках на подводящих проводах обмотки.
Обмотка трехфазного электродвигателя может быть соединена в звезду (рисунок 3-21, а) или в треугольник (рисунок 3-21, б). При подключении к звезде начало или конец всех трех фаз подключаются к одной точке, а остальные три клеммы подключаются к трехфазной сети. Соединяя в треугольник, соедините конец первой фазы с началом второй, конец второй с началом третьей, а конец третьей с началом первой.Из точек подключения возьмите выводы для подключения мотора к трехфазной сети.
Трехфазная система различает фазные и линейные напряжения и токи. При присоединении к звезде между ними сохраняются следующие отношения:
при соединении в треугольник
Большинство трехфазных электродвигателей производятся на два линейных напряжения, например, 127/220 В или 220/380 В. При более низком сетевом напряжении обмотка соединяется треугольником, а при более высоком напряжении — к звезда.У таких электродвигателей на плате: выводят все шесть выводных проводников обмотки.
Однако есть электродвигатели на одно сетевое напряжение, в которых обмотка соединена звездой или треугольником внутри электродвигателя, а к клеммной колодке подключены только три проводника. Конечно, в этом случае можно было бы разобрать электродвигатель, отключить межфазные соединения и сделать три дополнительных вывода. Однако этого нельзя сделать, используя одну из схем двигателя в однофазной сети, которые приведены ниже.
Принципиальная схема подключения трехфазного электродвигателя с шестью выводами к однофазной сети представлена на рис. 3-22, а. Для этого две фазы соединяются последовательно и подключаются к однофазной сети, а третья фаза подключается к ним параллельно, включая пусковой элемент 1 с переключателем 2. Пусковым элементом может быть активное сопротивление или конденсатор. В этом случае рабочая обмотка займет 2/3 пазов статора, а пусковая 1/3.Таким образом, трехфазная обмотка обеспечивает необходимое соотношение пазов между рабочей и пусковой обмотками. При таком подключении угол между рабочей и пусковой обмотками составляет 90 ° эл. (Рисунок 3-22, б).
При последовательном соединении двух фаз необходимо убедиться, что они включены в соответствии с, а не наоборот, когда n. из. подключенные фазы вычитаются. Как видно из схемы на рис. 3-22, а, концы второй и третьей фаз C 5 и C 6 соединены с общей точкой.
Можно использовать трехфазный электродвигатель и в качестве конденсатора по схеме на рис. 3-23 с одним рабочим конденсатором 1 или с рабочим 1 и пусковым 2 конденсаторами. При такой схеме переключения емкость рабочего конденсатора мкФ определяется по формуле:
где I — номинальный ток двигателя, А; U — напряжение сети, В.
Трехфазный электродвигатель с тремя выводами и обмоткой статора, соединенной звездой, подключается к однофазной сети, как показано на рис.3-24. В этом случае емкость рабочего конденсатора определяется по формуле
Напряжение конденсатора U 1 = 1,3 U.
Трехфазный электродвигатель с тремя выводами и обмоткой статора, соединенной треугольником, подключается к однофазной сети, как показано на рис. 3-25. Емкость рабочего конденсатора определяется по формуле
Напряжение конденсатора U = 1,15 В.
Во всех трех случаях емкость пусковых конденсаторов может быть приблизительно определена из соотношения
При выборе схемы подключения следует ориентироваться на напряжение, на которое рассчитан трехфазный двигатель, и напряжение однофазной сети.Фазное напряжение трехфазного
Пример. Трехфазный электродвигатель мощностью 250 Вт, напряжением 127/220 В с номинальным током 2 / 1,15 А следует включать в однофазную сеть с напряжением 220 В.
При использовании схемы рис. 3-24 емкость рабочего конденсатора:
напряжение на конденсаторе U 1 = 1,3 220 = 286 В.
Емкость пускового конденсатора
При использовании трехфазного электродвигателя в качестве однофазного его мощность снижается до 50%, в качестве однофазного конденсатора — до 70% от номинальной мощности трехфазного электродвигателя.
Н.В. Виноградов, Ю.Н. Виноградов
Как рассчитать и изготовить электродвигатель
Москва 1974
По какому физическому принципу работает асинхронный двигатель. Асинхронный двигатель переменного тока
Электродвигатели — это силовые машины, используемые для преобразования электрической энергии в механическую. Общая классификация разделяет их по типу тока питания двигателей постоянного и переменного тока.В статье ниже рассматриваются электродвигатели со спецификацией переменного тока, их типы, отличительные характеристики и преимущества.
Электродвигатель переменного тока промышленного типа
Принцип преобразования энергии
Среди электродвигателей, используемых во всех отраслях промышленности и бытовых приборов, наиболее распространены электродвигатели переменного тока. Они встречаются практически во всех сферах жизни — от детских игрушек и стиральных машин до машин и мощных производственных машин.
Принцип действия всех электродвигателей основан на законе электромагнитной индукции Фарадея и законе Ампера.Первый из них описывает ситуацию, когда электродвижущая сила создается на замкнутом проводнике, находящемся в изменяющемся магнитном поле. В двигателях это поле создается обмотками статора, по которым протекает переменный ток. Внутри статора (который является корпусом устройства) находится подвижный элемент двигателя — ротор. По нему течет ток.
Вращение ротора объясняется законом Ампера, который гласит, что электрические заряды, протекающие по проводнику, находящемуся внутри магнитного поля, действуют в плоскости, перпендикулярной силовым линиям этого поля.Проще говоря, проводник, которым в конструкции двигателя является ротор, начинает вращаться вокруг своей оси, и он закреплен на валу, к которому подключены рабочие механизмы оборудования.
Типы двигателей и их устройства
Электродвигатели переменного токаимеют другое устройство, благодаря которому можно создавать машины с одинаковой частотой вращения ротора относительно магнитного поля статора, а также такие машины, у которых ротор «отстает» от вращающегося поля. По этому принципу эти двигатели делятся на соответствующие типы: синхронные и асинхронные.
Асинхронный
Основу конструкции асинхронного электродвигателя составляет пара важных функциональных деталей:
- Статор представляет собой блок цилиндрической формы, изготовленный из стальных листов с пазанами для прокладки токопроводящих обмоток, оси которых расположены под углом 120 ° друг к другу. Полюса обмоток идут в клеммную коробку, где по-разному подключаются в зависимости от требуемых параметров электродвигателя.
- Ротор.В конструкции асинхронных электродвигателей используются роторы двух типов:
- ,
- Короткозамкнутые. Он назван так потому, что состоит из нескольких алюминиевых или медных стержней, закороченных накоротко с помощью концевых колец. Эту конструкцию, являющуюся токонесущей обмоткой ротора, в электромеханике называют «беличьей клеткой».
- Фаза. На роторах этого типа установлена трехфазная обмотка, аналогичная обмотке статора. Чаще всего концы его проводов идут к клеммной колодке, где соединяются «звездой», а свободные концы соединяются с контактными кольцами.Фазовый ротор позволяет с помощью щеток добавить в цепь обмотки дополнительный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
Помимо описанных ключевых элементов асинхронного двигателя, в его конструкцию также входят вентилятор для охлаждения обмоток, клеммная коробка и вал, передающий генерируемое вращение на рабочие механизмы оборудования, работа которого обеспечивается. этим движком.
Работа асинхронных электродвигателей основана на законе электромагнитной индукции, который гласит, что электродвижущая сила может возникать только в условиях разницы скорости вращения ротора и магнитного поля статора.Таким образом, если бы эти скорости были равны, ЭДС не могла бы возникнуть, но воздействие на вал таких «тормозных» факторов, как нагрузка и трение подшипников, всегда создает достаточные условия для работы.
Синхронный
Конструкция синхронных двигателей переменного тока несколько отличается от асинхронных аналогов. В этих машинах ротор вращается вокруг своей оси со скоростью, равной скорости вращения магнитного поля статора. Ротор или якорь этих устройств также снабжены обмотками, которые одним концом соединены между собой, а другими — с вращающимся коллектором.Контактные площадки на коллекторе установлены таким образом, чтобы в определенный момент времени через графитовые щетки можно было подавать питание только на два противоположных контакта.
Принцип работы синхронных электродвигателей:
- При взаимодействии магнитного потока в обмотке статора с током ротора возникает крутящий момент.
- Направление движения магнитного потока изменяется одновременно с направлением переменного тока, так что выходной вал вращается в одном направлении.
- Регулировка желаемой скорости осуществляется регулировкой входного напряжения. Чаще всего в высокоскоростном оборудовании, например, в перфораторах и пылесосах, эту функцию выполняет реостат.
Чаще всего причинами выхода синхронных двигателей являются:
- износ графитовых щеток или ослабление прижимной пружины;
- износ подшипников вала;
- Загрязнение коллектора (зачистить наждачной бумагой или спиртом).
Трехфазный генератор
История изобретения
Изобретение простейшего способа преобразования энергии из электрической в механическую принадлежит Майклу Фарадею. В 1821 году этот великий английский ученый провел эксперимент с проводником, сброшенным в сосуд с ртутью, на дне которого лежал постоянный магнит. После подачи электричества на проводник он приходил в движение, вращаясь соответственно силовыми линиями магнитного поля.Сейчас этот опыт часто проводят на уроках физики, заменяя ртуть рассолом.
Дальнейшее изучение вопроса привело к созданию Питером Барлоу в 1824 году униполярного двигателя, названного колесом Барлоу. В его конструкцию входят две шестерни из меди, расположенные на одной оси между постоянными магнитами. После подачи тока на колеса в результате его взаимодействия с магнитными полями колеса начинают вращаться. В ходе экспериментов ученый установил, что направление вращения можно изменить, изменив полярность (переставляя магниты или контакты).Практическое применение «колеса Барлоу», но сыграло важную роль в исследовании взаимодействия магнитных полей и заряженных проводников.
Первый рабочий образец устройства, ставший прародителем современных двигателей, был создан русским физиком Борисом Семеновичем Якоби в 1834 году. Принцип использования вращающегося ротора в магнитном поле, продемонстрированный в этом изобретении, практически не изменился при использовании современные двигатели постоянного тока.
Но создание первого двигателя с асинхронным принципом Работа принадлежит сразу двум ученым — Никола Тесла и Галилео Феррарис, которые успешно продемонстрировали свои изобретения за один год (1888 г.).Спустя несколько лет созданный Николой Тесла двухфазный бесщеточный двигатель переменного тока уже использовался на нескольких электростанциях. В 1889 году русский инженер-электрик Михаил Осипович Доливо-Добровольский усовершенствовал изобретение Теслы для работы в трехфазной сети, благодаря чему ему удалось создать первый асинхронный двигатель переменного тока мощностью более 100 Вт. Также ему принадлежит изобретение способов соединения фаз в трехфазных электродвигателях: «звезда» и «треугольник», пусковых реостатов и трехфазных трансформаторов.
Система переменного тока, предложенная Westinghouse
Подключение к однофазным и трехфазным источникам питания
По типу питающей сети двигатели переменного тока подразделяются на одно- и трехфазные.
Подключение асинхронных однофазных двигателей выполняется очень легко — для этого достаточно подключить фазный и нулевой провод однофазной сети 220В. Синхронные двигатели тоже могут получать питание от этого типа сети, но подключение немного сложнее — нужно соединить обмотки ротора и статора так, чтобы их однополюсные контакты намагничивания располагались друг напротив друга.
Подключение к трехфазной сети несколько сложнее. Прежде всего, следует отметить, что клеммная коробка содержит 6 контактов — попарно для каждой из трех обмоток. Во-вторых, дает возможность использовать один из двух способов подключения («звезда» и «треугольник»). Неправильное подключение может вызвать неисправность двигателя из-за расплавления обмоток статора.
Основное функциональное различие между «звездой» и «треугольником» — это разная потребляемая мощность, которая предназначена для подключения машины к трехфазным сетям с различным линейным напряжением — 380 В или 660 В.В первом случае необходимо соединить обмотки по схеме «треугольник», а во втором — «звездой». Это правило включения позволяет в обоих случаях иметь на обмотках каждой фазы напряжение 380В.
В коммутационной панели выводы обмотки расположены таким образом, что перемычки, используемые для переключения, не перекрещиваются. Если клеммная коробка двигателя содержит только три зажима, то она рассчитана на работу с тем же напряжением, которое указано в технической документации, и обмотки соединены между собой внутри.
Преимущества и недостатки электродвигателей переменного тока
Сегодня среди всех электродвигателей устройства переменного тока занимают лидирующие позиции по объему использования на электростанциях. У них невысокая стоимость, простая в обслуживании конструкция и КПД не менее 90%. К тому же их устройство позволяет плавно изменять скорость вращения, не прибегая к дополнительному оборудованию вроде коробок передач.
Основным недостатком двигателей переменного тока с асинхронным принципом работы является то, что регулировать частоту вращения их вала можно только путем изменения входной частоты тока.Это не позволяет поддерживать постоянную скорость вращения, а также снижает мощность. Асинхронные двигатели характеризуются высокими пусковыми токами, но низким пусковым моментом. Для исправления этих недостатков используется частотный привод, но его цена противоречит одному из главных достоинств этих двигателей — невысокой стоимости.
Слабое место синхронного двигателя — его сложная конструкция. Графитовые щетки довольно быстро выходят из строя под нагрузкой, а также теряют плотный контакт с коллектором из-за ослабления прижимной пружины.Кроме того, эти двигатели, как и асинхронные аналоги, не защищены от износа подшипников вала. К недостаткам также можно отнести более сложный запуск, необходимость в источнике постоянного тока и исключительно частотно-регулируемое регулирование скорости.
Приложение
На сегодняшний день электродвигатели со спецификацией для переменного тока распространены во всех областях промышленности и быта. На электростанциях они устанавливаются как генераторы, используются в производственном оборудовании, автомобильной и даже бытовой технике.Сегодня в каждом доме можно найти хотя бы одно устройство с электродвигателем переменного тока, например, стиральную машину. Причины такой большой популярности — универсальность, долговечность и простота обслуживания.
Среди асинхронных электрических машин Наибольшее распространение получили устройства с трехфазной спецификацией. Они являются оптимальным вариантом для использования во многих энергоблоках, генераторах и установках большой мощности, работа которых связана с необходимостью контроля скорости вращения вала.
Электромашина постоянного тока состоит из статора, якоря, коллектора, щеткодержателя и подшипниковых щитов (рисунок 1).Статор состоит из рамы (корпуса), основного и дополнительного полюсов, имеющих обмотки возбуждения. Эту неподвижную часть машины иногда называют индуктором. Его основное предназначение — создание магнитного потока. Рама сделана из стали, к ней прикручены основные и дополнительные стойки, а также подшипниковые щиты. Сверху на раме — кольца для транспортировки, снизу — лапы для крепления станка к фундаменту. Основные столбы станка набираются из листов электротехнической стали 0.Толщиной 5-1 мм для уменьшения потерь, возникающих из-за пульсаций магнитного поля полюсов в воздушном зазоре под полюсами. Стальные листы сердечника опоры прижимаются и скрепляются заклепками.
Рисунок 1 — Машина постоянного тока:
I — вал; 2 — передний подшипниковый щит; 3 — коллектор; 4 — щеткодержатель; 5 — сердечник якоря с обмоткой; б — сердечник главного столба; 7 — полюсная катушка; 8 — кровать; 9 — задний подшипниковый щиток; 10 — вентилятор; 11 — лапы; 12 — подшипник
Рисунок 2 — Полюса машины постоянного тока:
a — главный полюс; б — дополнительный столб; в — обмотка основного полюса; r — обмотка дополнительного полюса; 1 — полюсный наконечник; 2 — сердечник
В полюсах различают сердечник и наконечник (рисунок 2).Сердечник надевается на обмотку возбуждения, по которой течет ток, создавая магнитный поток. Обмотка возбуждения наматывается на металлический каркас, покрытый электрокартоном (в больших машинах), или помещается на изолированный сердечник из электрокартона (маленькие машины). Для лучшего охлаждения змеевик разделен на несколько частей, между которыми оставлены вентиляционные каналы. Между основными полюсами устанавливаются дополнительные столбы. Они служат для улучшения переключения. Их обмотки включены последовательно в цепь якоря, поэтому проводники обмотки имеют большое сечение.
Якорь машины постоянного тока состоит из вала, сердечника, обмотки и коллектора. Сердечник анкера собран из штампованных листов электротехнической стали толщиной 0,5 мм и запрессован с двух сторон с помощью шайб высокого давления. В машинах с радиальной системой вентиляции листы сердцевины собираются в отдельные пачки толщиной 6-8 см, между которыми делаются вентиляционные каналы шириной 1 см. В случае осевой вентиляции в сердечнике делается отверстие для прохождения воздуха по валу.На внешней поверхности якоря имеются пазы для намотки.
Рисунок 3 — Расположение секции обмотки якоря в пазах сердечника
Обмотка якоря изготавливается из медных проводов круглого или прямоугольного сечения в виде готовых секций (рисунок 3). Они входят в пазы, где тщательно изолируются. Обмотка выполнена двухслойной: поместите в каждую канавку две стороны разных якорных катушек — одну над другой. Обмотка фиксируется в пазах клиньями (деревянными, гетинаксными или текстолитовыми), а передние части фиксируются специальной проволочной повязкой.В некоторых конструкциях клинья не используются, а обмотка фиксируется бандажом. Бинт изготовлен из немагнитной стальной проволоки, намотанной с предварительным натяжением. В современных машинах для перевязки анкеров используют стеклянную ленту.
Коллектор станка постоянного тока собран из клиновидных пластин холоднокатаной меди. Пластины изолированы друг от друга прокладками из коллекторного миканита толщиной 0,5-1 мм. Нижние (узкие) края пластин имеют вырезы в виде «ласточкин хвост», которые служат для крепления медных пластин и миканитовой изоляции.Коллекторы скрепляют прижимные конусы двумя способами: в одном из них усилие от зажима передается только на внутреннюю поверхность «ласточкин хвост», во втором — на «ласточкин хвост» и конец пластины.
Коллекторы с первым способом крепления называются арочными, со вторым — клиновым. Наиболее распространены арочные коллекторы.
В пластинах коллектора со стороны анкера при небольшой разнице диаметров коллектора и анкера выполнены выступы, в которых фрезерованы прорези.Уложены концы обмотки якоря и припаяны оловянным припоем. При большой разнице диаметров припайка к коллектору производится при помощи медных полосок, которые называются «петушками».
В высокоскоростных высокоскоростных машинах используются внешние изолированные кольца бандажа для предотвращения выпучивания пластин под действием центробежных сил.
Щеточная машина состоит из траверсы, щеточных пальцев (болтов), щеткодержателей и щеток. Траверса предназначена для закрепления на ней щеток щеткодержателей, образующих электрическую цепь.
Щеткодержатель состоит из клетки, в которую помещается щетка, рычага для прижатия щетки к коллектору и пружин. Давление на щетку 0,02-0,04 МПа.
Для подключения щетки к электрической цепи имеется гибкий медный провод.
В машинах малой мощности используются трубчатые щеткодержатели, которые закреплены в подшипниковом щите. Все щеткодержатели одинаковой полярности соединены между собой шинами, которые подключены к клеммам машины.Кисти
(Рисунок 4), в зависимости от состава порошка, способа изготовления и физических свойств делятся на шесть основных групп: угольно-графитовые, графитовые, электрографические, медно-графитовые, бронзово-графитовые и серебристо-графитовые.
Подшипниковые щиты электрической машины служат соединительными деталями между рамой и якорем, а также несущей конструкцией якоря, вал которого вращается в подшипниках, установленных в щитах.
Рисунок 4 — Щетки:
а — для машин малой и средней мощности; б — для машин большой мощности; 1 — щеточная проволока; 2 — наконечник
Бывают обычные и фланцевые подшипниковые щиты.
Щитки подшипников изготавливаются из стали (реже из чугуна или алюминиевых сплавов) методом литья, а также сварки или штамповки. В центре щита — расточка под подшипник качения: шариковый или роликовый. В крупногабаритных машинах во многих случаях используются подшипники скольжения.
В последнее время статорные двигатели постоянного тока собирают из отдельных листов электротехнической стали. В листе одновременно штампуются коромысло, пазы, основные и дополнительные полюса.
Основное назначение любого двигателя — передача (передача) механической энергии рабочим органам производственных механизмов, необходимой им для выполнения определенных технологических операций.Эта механическая энергия вырабатывается электродвигателем за счет электроэнергии, потребляемой им из электрической сети, к которой он подключен. Другими словами, электродвигатель преобразует электрическую энергию в механическую.
Количество механической энергии, производимой двигателем в единицу времени, называется его мощностью. Механическая мощность на валу двигателя определяется произведением крутящего момента двигателя и его скорости вращения. Обратите внимание, что некоторые двигатели имеют поступательное движение, поэтому их механическая мощность зависит от развиваемого двигателем усилия и скорости этого поступательного движения.
В зависимости от характера питающего напряжения различают двигатели постоянного и переменного тока. К наиболее распространенным двигателям постоянного тока относятся, например, двигатели с независимым, последовательным и смешанным возбуждением, а примерами двигателей переменного тока являются асинхронные и синхронные двигатели.
Несмотря на разнообразие существующих электродвигателей (в том числе специального назначения), действие любого из них основано на взаимодействии магнитного поля и проводника с электрическим током или магнитным полем и ферромагнитным телом или постоянным магнитом.
Рассмотрим взаимодействие магнитного поля и проводника с электрическим током. Предположим, что B — магнитное поле магнита с полюсами N-S (рис. 1),
рис. I. Взаимодействие магнитного поля и проводника с током.
, силовые линии которого показаны тонкими линиями, проводник помещается перпендикулярно этим линиям стоком I. Затем, согласно известному физическому закону, на этот проводник действует сила F (сила Ампера), которая пропорциональна индукция магнитного поля B, длина проводника I и сила тока I:
F = BlI.(1)
Направление силы, действующей на проводник F, можно определить по так называемому правилу левой руки: если пальцы левой руки тянутся в направлении тока I, а ладонь расположена так что линии магнитного поля входят в него, согнутый большой палец покажет направление действия силы F.
Отметим, что в соответствии с законом электромагнитной индукции ток, проходящий через проводник, будет создавать собственное магнитное поле. поле с концентрическими силовыми линиями вокруг проводника (на рисунке 1 это поле не показано), и поэтому картина магнитного поля между полюсами магнита немного изменится.Однако это обстоятельство не меняет сути рассматриваемого явления.
Схема, показанная на рис. 1, может служить простейшей моделью двигателя поступательного движения, поскольку под действием силы F проводник с током стремится совершить прямолинейное перемещение в направлении действия этой силы. .
Чтобы объяснить принцип генерации крутящего момента в двигателях вращательного движения, рассмотрим поведение в поле того же магнита рамки с током, состоящим из проводников A и B (рис.2, а). Ток к проводникам рамки подводится от внешнего источника постоянного тока через два контактных кольца K, закрепленных на оси вращения рамки 00 ».
В случаях, показанных на рис. 2, и положение рамки и ток и направления магнитного поля на проводники рам A и B будут подвергаться действию сил F, имеющих направления, указанные на рисунке, в соответствии с правилом левой руки. Эти силы будут создавать крутящий момент M относительно оси рамки 00 «, под которым рама будет вращаться против часовой стрелки.
В курсе физики показано, что этот момент прямо пропорционален силе тока I, индукции магнитного поля B, площади рамки с током S и зависит от угла a между линиями магнитное поле и ось рамки aa, перпендикулярная ее плоскости:
M-BIS sin a-Mmax sin a, (2)
где Mmax = BIS — максимальный момент, развиваемый рамой. При положении рамы, показанном на рис. 2, а, угол а-90 °, поэтому момент, действующий на раму, максимален.
Рис. 2. Принцип работы двигателя постоянного тока. a — формирование момента при a = 90 °; b — формирование момента при a = 270 «: e — формирование направления постоянного крутящего момента.
Рассмотрим теперь другое положение рамы, когда она поворачивается на пол-оборота и проводник A уже находится под полюсом 5, а провод B находится под полюсом N (рисунок 2.6). Поскольку направление тока в проводниках было одинаковым, по тому же правилу левой руки можно определить, что в этом положении рамки сила F, действующая на его проводники изменили направление на противоположное.Соответственно, противоположное направление и направление крутящего момента M изменится, что будет иметь тенденцию вращать раму уже в другом направлении, по часовой стрелке. Такой же вывод легко сделать на основе анализа формулы (2): поскольку угол a стал 270 ° (90 ° +/- 180 °) или, что то же самое, -90 °, то sin a = -1 и момент изменил знак на противоположный.
Таким образом, рама под действием изменяющего направление крутящего момента будет колебаться вокруг своей оси вращения 00.«Такое устройство, очевидно, не может быть помещено в основу вращающегося двигателя с постоянным направлением, для которого обычно требуется постоянное направление и постоянное направление вращения.
Что нужно сделать для обеспечения того, чтобы результирующий крутящий момент на раме постоянное направление? Нетрудно видеть, что для этого есть две принципиальные возможности:
1) изменить направление тока в проводниках рамки при изменении положения проводников под полюсами магнитной системы;
2 ) изменяют направление магнитного поля по мере того, как рамка вращается и направление тока в ней является постоянным, другими словами, гили создают вращающееся магнитное поле.
Первый из этих принципов используется в двигателях постоянного тока, второй лежит в основе работы двигателей переменного тока.
Давайте сначала рассмотрим формирование постоянной в направлении крутящего момента путем изменения направления тока в рамке и, таким образом, мы объясним принцип действия двигателей постоянного тока.
Для изменения направления тока в проводниках корпуса, очевидно, необходимо иметь устройство, изменяющее направление тока в корпусе в зависимости от положения его проводников.
Простейшее механическое устройство этого типа может быть реализовано простым изменением конструкции скользящих контактов К (рис. 2, а, б), служащих для подачи тока на корпус. Это преобразование заключается в замене двух контактных колец на одно, но состоящее из двух изолированных друг от друга половин (сегментов), к которым подключаются проводники шпангоутов A и B (рис. 2, в). В этом случае при повороте рамы на пол-оборота направление тока в проводниках меняется на противоположное, поэтому крутящий момент сохранит свое направление, а рама продолжит вращаться в том же направлении.Аналогичное механическое переключающее устройство, называемое коллектором, используется в обычных двигателях постоянного тока. В некоторых специальных конструкциях двигателей, обсуждаемых ниже, это переключающее устройство выполнено бесконтактным (электронным).
Настоящий двигатель постоянного тока, упрощенная схема которого приведена на рис. 3, конечно, имеет гораздо более сложную конструкцию, чем показанный на рис. 2, в. Для получения большого крутящего момента обычно используют несколько десятков рамок, образующих обмотку 1 якоря. Проводники обмотки якоря расположены в пазах цилиндрического ферромагнитного сердечника 2, а их концы соединены с соответствующим количеством изолированных сегментов кольца, образующего коллектор (на рисунке не показаны).
Рис. 3. Схема двигателя постоянного тока.
Рис. 4 Принцип работы синхронного двигателя. а — положение равновесия; б — формирование крутящего момента
Сердечник, обмотка и коллектор образуют якорь двигателя, который вращается в подшипниках, установленных в корпусе двигателя. Ток к проводам якоря подводится от сети постоянного тока с помощью скользящих щеточных контактов.
Магнитное поле создается полюсами 3 магнита, расположенного в корпусе 4 двигателя.Это магнитное поле обычно называют полем возбуждения. Для его образования можно использовать постоянные магниты или электромагниты.
Обмотку электромагнита обычно называют обмоткой возбуждения (позиция 5 на рисунке 3). Обмотка возбуждения подключена к сети постоянного тока и может включаться независимо от обмотки якоря или последовательно с ней. В первом случае двигатель называется двигателем с независимым возбуждением, во втором — с последовательным возбуждением.
Некоторые двигатели постоянного тока имеют две обмотки возбуждения — независимую и последовательную.Такие двигатели называются двигателями со смешанным возбуждением. Число полюсов магнитного поля возбуждения может быть больше двух, например четыре, как показано на рис. 3.
Теперь обратимся к рассмотрению двигателей переменного тока.
Вернемся снова к экспериментам с рамой и рассмотрим ее положение, показанное на рис. 4, а. Обратите внимание, что этот рисунок представляет собой упрощенный вид спереди схемы на рис. 2а, направление тока в проводнике, текущем в плоскость чертежа, обозначено крестиком, а поток из плоскости чертежа обозначен точкой .
Из формулы (2) следует, что в показанной горизонтальной раме крутящий момент, действующий на раму, равен нулю (a = 0), хотя силы, действующие на проводники A и B, отличны от нуля. Объяснение этой ситуации состоит в том, что направление действия этих сил проходит через ось вращения рамы 00 «, поэтому плечо сил F относительно этой оси равно нулю и крутящий момент не создается.
Это положение рамы рама уравновешена, и она находится в состоянии покоя.
Давайте теперь как-нибудь повернем магнит NS по часовой стрелке на некоторый угол a, не меняя направления тока в проводниках, как показано на рис.4.6. Легко видеть, что такой поворот магнита вызовет изменение направления действия сил F и появление плеча приложения этих сил относительно оси вращения рамки. В результате на раму будет действовать крутящий момент в соответствии с формулой (2), стремясь вернуть раму в положение равновесия, и тогда рама повернется вслед за магнитом на тот же угол a.
Если теперь мы начнем вращать магнит NS равномерно, рамка также будет вращаться в том же направлении синхронно с вращением магнитного поля, поскольку при появлении «несинхронизма» между вращением поля 12 и рамки ( a = / = 0), стремясь синхронизировать это вращение.Двигатели, использующие этот принцип, поэтому получили название синхронных двигателей, а их момент, определяемый по формуле (2), часто называют синхронизирующим моментом.
Итак, для работы синхронного двигателя необходимо создать вращающееся магнитное поле и разместить в нем проводники, обтекаемые неизменным по направлению тока.
Давайте рассмотрим, как вращающееся магнитное поле создается в реальных двигателях переменного тока. Вращающееся магнитное поле синхронного двигателя образовано системой обмоток, подключенных к сети переменного тока.Обычно в синхронных двигателях используются трехфазные обмотки, уложенные в пазах сердечника статора с определенным пространственным сдвигом по окружности. В теории электрических машин показано, что при подключении такой обмотки к трехфазной сети переменного тока токи образуют вращающееся в воздушном зазоре двигателя магнитное поле, частота вращения которого n0 определяется частотой ток в сети f и количество пар полюсов двигателя p, образованных обмоткой статора:
Взаимодействие этого вращающегося магнитного поля с током в проводниках обмотки ротора вызовет вращение синхронного двигателя, что будет происходить синхронно с вращением магнитного поля статора.
При отсутствии момента нагружения на валу синхронного двигателя оси магнитных полей статора и ротора совпадают (cc = 0), двигатель не развивает крутящий момент и вращается с частотой n0. Если двигатель появляется в момент сопротивления (нагрузки), ось поля ротора начинает отставать от оси поля статора, и этот процесс будет происходить до тех пор, пока под некоторым углом a0 не появится вращающий (синхронизирующий) момент мотор становится равным моменту загрузки.Синхронный двигатель продолжит вращаться с частотой n, преодолевая момент сопротивления на своем приятеле.
Это положение будет сохраняться до значения максимального крутящего момента двигателя, соответствующего углу «= 90 °. Говорят, что при дальнейшем увеличении момента нагрузки синхронный двигатель «выходит из синхронизма» и останавливается. Таким образом, синхронный двигатель может преодолеть только определенный номинальный момент сопротивления, который соответствует углу a = 20-30 ° для синхронных двигателей.
Упрощенная схема синхронного двигателя показана на рис.5. В кожухе двигателя в пазах сердечника I проложена трехфазная обмотка переменного тока 2, которая при подключении к сети переменного тока образует вращающееся магнитное поле. Сердечник с обмоткой образует неподвижную часть двигателя — статор.
Ток возбуждения воспроизводится обмоткой возбуждения 3 двигателя, расположенной на ферромагнитном сердечнике 4. Обмотка возбуждения имеет несколько десятков витков (рамок) и подключена к сети постоянного тока через контактные кольца и щеточный контакт (на рис. эти части двигателя не показаны).
Обмотка возбуждения, сердечник и контактные кольца вместе с валом двигателя образуют ротор двигателя — его вращающуюся часть.
Синхронный двигатель, построенный по схеме рис. 5, обычно называют полюсным полюсом, что связано с наличием полюсов у сердечника ротора. Наряду с этим существуют так называемые неполюсные синхронные двигатели, у которых сердечник ротора не имеет ярко выраженных полюсов.
Рис. 5. Схема синхронного двигателя с электромагнитным возбуждением.
Действие синхронного двигателя может быть основано, помимо рассмотренного выше принципа взаимодействия магнитного поля и проводника с током, также на принципе взаимодействия магнитного поля с постоянным магнитом или ферромагнетиком. тело. Чтобы проиллюстрировать этот принцип, мы рассмотрим поведение постоянного магнита 2, помещенного в поле магнита 1, как показано на рис. 6. Из курса физики известно, что противоположные полюса двух магнитов всегда притягиваются, в то время как те же полюса отталкиваются.Соответственно, магнит 2 займет положение, в котором его северный полюс будет находиться на южном полюсе магнита 1, а южный полюс — на северном полюсе. Это положение будет равновесным для рассматриваемой системы двух магнитов.
Рис. 6. Схема синхронного двигателя.
Рис. 7. Принцип работы асинхронного двигателя.
Отметим здесь очень важный факт: положение равновесия одновременно соответствует минимальному магнитному сопротивлению на пути магнитного потока и минимальной кривизне силовых линий магнитного поля.Другими словами, магниты стремятся занять такое взаимное положение, при котором силовые линии магнитного поля слегка искривлены, а магнитное сопротивление магнитному потоку минимально.
Теперь легко узнать, что будет с магнитом 2, если мы начнем вращать магнит I. Очевидно, он также начнет вращаться вместе с магнитом I, пытаясь поддерживать положение равновесия, и частоты вращения оба магнита будут одинаковыми (синхронными). Синхронные двигатели, роторы которых являются постоянными магнитами, называются синхронными двигателями с постоянными магнитами.
Такое же синхронное вращение ротора можно также получить, если вместо постоянного магнита 2 поместить ферромагнитное тело той же формы в поле постоянного магнита I. После помещения в магнитное поле ферромагнитный ротор будет быть намагниченным, причем южный полюс находится на северном полюсе магнита, а северный полюс ферромагнитного тела — на южном полюсе магнита. Такое положение ферромагнитный ротор будет стремиться сохранять даже при вращении магнитного поля, что определяет работу синхронного двигателя с ротором в форме ферромагнитного тела.Этот тип двигателя получил название синхронного двигателя с реактивным ротором. Отметим, что для работы такого двигателя его ротор в принципе должен иметь ярко выраженные полюса, а их количество (не обязательно два) должно быть равно количеству полюсов вращающегося магнитного поля.
Формирование вращающегося магнитного поля синхронного реактивного двигателя с постоянными магнитами происходит так же, как в обычном синхронном двигателе, с использованием обмотки статора, подключенной к сети переменного тока.
Чтобы объяснить принцип работы другого, очень распространенного типа асинхронного двигателя переменного тока, мы снова обратимся к экспериментам с рамой, помещенной в магнитное поле. Однако на этот раз мы не будем подводить ток к рамке, а сделаем ее замкнутой, как показано на рис. 7. Давайте выясним, что будет с такой рамкой, если мы снова начнем вращать полюса магнита, скажем, с помощью скорость по часовой стрелке.
Поскольку рама изначально неподвижна, при вращении магнита магнитный поток, проходящий через раму, начинает изменяться.Тогда в соответствии с законом электромагнитной индукции (закон Фарадея) в рамке будет индуцироваться (индуцироваться) электродвижущая сила (ЭДС) индукции, при которой ток воздействия будет течь через проводники рамки. Взаимодействие этого тока с магнитным полем приведет к возникновению момента, под действием которого рамка начнет вращаться. Это принцип работы асинхронного двигателя.
Для определения направления вращения рамки применим закон Ленца, согласно которому токи, протекающие в рамке при изменении магнитного потока по ее контуру, имеют направление, в котором они препятствуют этому изменению.И поскольку в проведенном эксперименте это изменение вызвано вращением магнитного поля, токи в рамке будут иметь направление, в котором результирующий крутящий момент будет вращать рамку в том же направлении, что и поле, поскольку только в этом случае будет уменьшение изменения магнитного потока по контуру рамки. Таким образом, рамка начнет вращаться в том же направлении, что и поле, но со скоростью вращения n.
Отметим здесь один важный факт: частота вращения рамки n всегда будет несколько меньше частоты вращения магнитного поля n0.Действительно, если предположить обратное, т.е. что частоты вращения кадра и поля совпадают, то магнитный поток через контур кадра не изменится, ЭДС и токи в кадре не будут индуцироваться соответственно, и крутящий момент исчезает.
Таким образом, для создания кадра крутящего момента необходима принципиальная разница между частотами вращения магнитного поля n0 и кадра n, то есть асинхронность (несинхронность) их вращения, что отражено в названии этого типа электрического мотор.Степень разницы между этими частотами и вращениями численно характеризуется так называемым скольжением асинхронного двигателя s, определяемым по формуле
Здесь следует отметить, что когда момент нагрузки появляется на оси рамы из-за уменьшения частота вращения n (рамка затормаживается), проскальзывание двигателя увеличится, и магнитный поток через контур рамки начнет изменяться сильнее. При этом начнут увеличиваться ЭДС и токи в корпусе и, соответственно, крутящий момент двигателя.Этот процесс будет происходить до тех пор, пока при определенной скорости вращения рамы крутящий момент рамы не уравновесит момент нагрузки, и новый установившийся режим работы не наступит. При уменьшении нагрузки происходит обратный процесс.
Итак, для работы асинхронного двигателя необходимо наличие вращающегося магнитного поля и замкнутых рамок (контуров) на вращающейся части двигателя-ритора.
Вращающееся магнитное поле асинхронного двигателя (рисунок 8) формируется так же, как и в синхронном двигателе, с помощью обмоток 2, расположенных в пазах статора I и подключенных к сети переменного тока.
Обмотки 3-х роторов асинхронного двигателя состоят обычно из нескольких десятков замкнутых рам (контуров) и имеют две основные конструкции: короткозамкнутую и фазную.
При проведении короткозамкнутой обмотки проводники, проложенные в пазах ферромагнитного пакета 4 ротора, закорачиваются. Обычно такую намотку получают заливкой расплавленного алюминия в пазы мешка и называют «беличьей клеткой».
При выполнении «фазной» обмотки концы фаз обмотки выводятся через скользящие контакты (кольца), что позволяет включать в цепь ротора различные дополнительные резисторы, необходимые, например, для запуска двигателя или регулирования его оборотов. .
Рис. 8. Схема асинхронного двигателя.
Следует отметить, что для получения крутящего момента асинхронного двигателя не обязательно размещать обмотку от электрических проводников ротора. Можно изготовить ротор просто как твердый ферромагнитный цилиндр и поместить его в обычный статор асинхронного двигателя. Затем, когда обмотки статора подключены к сети и в массивном корпусе ротора появится вращающееся магнитное поле, будут индуцироваться так называемые вихревые токи (токи Фуко), направление которых также определяется законом Ленца.Когда эти токи взаимодействуют с магнитным полем, создается крутящий момент, под действием которого сплошной ротор начинает вращаться в направлении вращения магнитного поля, как обычный ротор с обмоткой. Такие двигатели называют асинхронными двигателями с массивным ротором.
Отметим, что вихревые токи возникают, конечно, и в 9 сердечниках обычного ротора с обмоткой, но в данном случае они вредны, так как вызывают дополнительный нагрев ротора. Обычно их действие пытаются ослабить, для чего сердечник ротора собирается (смешивается) из отдельных листов электротехнической стали, изолированных друг от друга, тем самым создавая большое электрическое сопротивление для вихревых токов.В этом случае ядро часто называют пакетом.
Рассмотренные в этом разделе общие принципы Работа двигателей постоянного и переменного тока — это физическая основа работы двигателей специального назначения.
Электродвигатели общего и специального назначения характеризуются номинальными данными, которые включают мощность на валу двигателя, напряжение, ток, скорость, КПД и некоторые другие значения. Основные номинальные данные регламентированы государственными стандартами (ГОСТ) на электрические машины и указаны в паспорте.
Номинальные данные двигателя соответствуют нормальному тепловому режиму его работы, при котором температура всех частей двигателя не превышает допустимого уровня. Для обеспечения этого режима двигатель соответствующим образом рассчитан и имеет систему охлаждения (вентиляции).
По способу охлаждения различают:
двигатели с естественным охлаждением, в которых нет специальных устройств для вентиляции; Двигатели
с внутренней и внешней самовентиляцией, охлаждаемые вентилятором, расположенным на валу двигателя и вентилирующим соответственно внутреннюю полость или внешнюю поверхность двигателя; Моторы
с независимым охлаждением, охлаждаемые отдельным вентилятором («райдер»), имеющим собственный привод.
Для работы двигателей характерны и некоторые другие значения, прямо не указанные в его паспорте — номинальный крутящий момент, соответствующий номинальным данным двигателя, и пусковой крутящий момент и ток, соответствующие моменту пуска (подключение к сети) двигателя. При анализе работы двигателя значения пускового момента и тока обычно сравнивают с соответствующими номинальными значениями. Крутящий момент и ток двигателя при пуске не должны превышать определенных допустимых значений, определяемых условиями прогрева двигателя и нормальной работы его коллекторно-щеточного узла.
Электродвигатель — это устройство, преобразующее энергию электричества в механическую энергию. Электродвигатели получили широкое распространение практически во всех сферах повседневной жизни. Прежде чем рассматривать типы электродвигателей, следует кратко обсудить принцип их работы. Все действие происходит по закону Ампера, когда вокруг провода образуется магнитное поле, по которому течет электрический провод. Когда этот провод вращается внутри магнита, каждая его сторона будет попеременно притягиваться к полюсам.Таким образом, проволочная петля будет вращаться. Электродвигатели делятся между собой в зависимости от используемого тока, который может быть переменным или постоянным.
Электродвигатели переменного тока
Особенностью переменного тока является изменение его направления определенное количество раз в течение секунды. Как правило, используется переменный ток частотой 50 герц.
При подключении ток сначала начинает течь в одном направлении, а потом его направление полностью меняется.Таким образом, стороны петли, получая рывок, поочередно притягиваются к разным полюсам. То есть, по сути, имеет место их упорядоченное притяжение и отталкивание. Поэтому при изменении направления проволочная петля будет вращаться вокруг своей оси. С помощью этих круговых движений энергия преобразуется из электрической в механическую.
Двигатели переменного токаимеют множество конструкций и представлены большим разнообразием моделей. Это дает возможность широко использовать их не только в промышленности, но и в быту.
Электродвигатели постоянного тока
Первыми изобретенными двигателями все еще были устройства постоянного тока. Переменный ток тогда еще был неизвестен. В отличие от переменной, движение постоянного тока всегда в одном и том же направлении. Вращение ротора прекращается после поворота на 90 градусов. Направление магнитного поля совпадает с направлением электрического тока.
Следовательно, металлическое кольцо, подключенное к источнику постоянного тока, разрезано на две части и называется кольцевым коммутатором.В начале вращения ток течет по первой стороне переключателя и по проводам. Электрический ток, протекающий по проволочной петле, создает в ней магнитное поле. При дальнейшем вращении петли поворачивается и переключатель. После того, как пустое пространство прошло через кольцо, оно перемещается к другой части переключателя. Далее возникает действие переменного электрического тока, благодаря которому вращение петли продолжается.
Все двигатели постоянного тока используются вместе с устройствами переменного тока на производстве и на транспорте.
Классификация электродвигателей
Электродвигатели нашли применение не только в производственной сфере, но и в быту. Двигатели асинхронного типа, как и синхронные, отличаются таким свойством, как обратимость. Они могут работать не только в режиме генератора, но и в двигателе. Читайте, какая гофра для кабеля и проводов и как выбрать.
Необходимо более внимательно подойти к изучению электрических машин, поэтому рассмотрим принцип работы асинхронного двигателя:
- После подключения этого двигателя к сети его обмотки необходимо закрепить треугольником.
- При отсутствии маркировки на выводах клеммной коробки начальную и конечную часть обмотки следует определять независимо.
- После включения обмоток двигателя образуется вращающееся поле ведущей части.
- Подключить двигатель в трехфазную сеть переменного тока. Поле проникает не только в обмотку неподвижной части, но и в обмоточную часть ротора.
- Движущееся поле индуцирует электродвижущую силу.В обмотке неподвижной части индуцируется электродвижущая сила самоиндукции. Его направление ориентировано на напряжение, он также играет роль ограничителя тока в обмотке статора.
- Короткое замыкание обмотки двигателя. В двигателях с таким типом ротора под действием ЭДС в обмотке появляется ток. Из-за того, что ток в обмотке взаимодействует с магнитным полем, создается сила Fem, которая является электромагнитной.
Коллекторные двигатели аналогичны асинхронным машинам, двигателям универсального типа.
Коллекторные электродвигатели могут работать как от постоянного, так и от переменного тока.
Для развития высоких оборотов таким двигателям не нужны большие нагрузки. В бытовых системах запуск коллекторных двигателей чаще всего выполняется под нагрузкой.
Например, можно рассмотреть вентилятор обычного пылесоса. Те части машины, которые приводятся в движение, обычно крепятся к валу двигателя. Коллекторные универсальные двигатели имеют ряд недостатков. Помимо неприятного шума, они могут создавать помехи для различных радиоустройств.Такие моторы требуют особого ухода. Прочтите инструкцию, как выбрать детектор скрытой проводки и как ею пользоваться.
УКоллекторные универсальные машины есть свои достоинства. В бытовых машинах они используются гораздо чаще, чем асинхронные двигатели. Скорость вращения коллекторных двигателей может достигать 25000 об / мин. Несмотря на это, они отличаются плавной регулировкой скоростных режимов. В этом их универсальность.
Принцип действия коллекторного электродвигателя следующий: прямоугольная рамка с осью вращения, являющаяся проводником тока, помещенная между полюсами электромагнита, непременно придет в движение.От того, где в кадре течет ток, будет зависеть и ход его вращения.
Принцип работы двигателей разных типов
Принцип работы асинхронного двигателя смотрите на видео:
Принцип работы электродвигателей будет отличаться в зависимости от типа двигателя. Благодаря электродвигателям человек смог достичь столь высокого технического прогресса. Люди узнают о том, как работает электрический двигатель постоянного тока, еще в школе.Практически все машины постоянного тока работают за счет магнитного притяжения и обратного процесса — отталкивания.
Если вы поместите провод между двумя полюсами магнита и пропустите через этот провод ток, он будет вытолкнут изнутри. Ток в то время, когда он проходит через провод, образует магнитное поле по всей его длине. Когда поле магнита и проводника соединены, магнитное поле от одного полюса будет увеличиваться, а с другой стороны — ослабнет с другой стороны.Проволока будет проталкиваться под прямым углом и в определенном направлении, которое можно рассчитать по правилу левой руки. Это явление использовалось не только для работы самых первых электродвигателей, но и в современных устройствах. Читать.
Электродвигатель современного типа имеет не одну раму, а якорь с большим количеством жил. Они упакованы в специальные пазы. Вместо электромагнита используется статор с обмоткой. Принцип работы этого двигателя следующий:
- если пропустить ток через верхние провода якоря со скоростью «от нас», а в обратном направлении — через нижние провода,
- начнут выталкивать верхние проводники в правую сторону, а нижние влево.
- сила удара будет передана на проволоку якоря.
- благодаря этому процессу якорь начнет вращаться.
- крутящий момент передается на вал двигателя, и двигатель начинает приводить в движение различные механизмы.
Электродвигатели переменного тока чаще всего используются в бытовых условиях. Их необходимость обусловлена тем, что они могут обеспечивать постоянную постоянную скорость вращения и, кроме того, давать возможность регулировать эту скорость.
Посмотрите видео для подробного объяснения переменного и постоянного тока:
В таком двигателе располагаются обмотки, намотанные на якорь или ротор. Выводы обмоток припаиваются к частям коллектора или токосъемному кольцу. Напряжение подается через графитовые щетки. Они должны подавать напряжение только на одну пару контактов. Вращающаяся фаза в двигателе этого типа возникает в результате взаимодействия между током якоря и потоком в обмотке, где происходит процесс возбуждения.Поскольку течение переменного тока будет преобразовано, произойдет обмен и направление потока в якоре и корпусе. Читать.
Посмотрите видео, как работает инверторный двигатель Electrolux:
Видео
Посмотреть видео о моторах:
Постоянно вращение будет односторонним. Чтобы изменить скорость движения, нужно изменить напряжение. В случае дрелей или, например, в пылесосах, для регулировки скорости используется сопротивление переменного типа.
22.11.2015 Татьяна Сумо
В чем разница между двигателями переменного тока и двигателями постоянного тока?
Между двигателями переменного и постоянного тока существует много различий. Наиболее очевидное различие — это тип тока, который каждый двигатель превращает в энергию: переменный ток в случае двигателей переменного тока и постоянный ток в случае двигателей постоянного тока. Двигатели переменного тока известны своей повышенной выходной мощностью и эффективностью, в то время как двигатели постоянного тока ценятся за их регулировку скорости и диапазон выходной мощности.Двигатели переменного тока доступны в одно- или трехфазной конфигурации, тогда как двигатели постоянного тока всегда однофазные.
Подробнее об асинхронных двигателях
В двигателе переменного тока энергия поступает из магнитных полей, создаваемых через катушки, намотанные вокруг выходного вала. Двигатели переменного тока состоят из нескольких частей, включая статор и ротор. Двигатели переменного тока эффективны, долговечны, бесшумны и универсальны, что делает их жизнеспособным решением для многих потребностей в производстве электроэнергии.
К двум типам двигателей переменного тока относятся:
- Синхронный: Синхронный двигатель вращается с той же скоростью, что и частота тока питания, что и дало ему название.Синхронные двигатели состоят из статора, ротора и синхронных двигателей, которые используются в широком спектре приложений.
- Индукция: Асинхронные двигатели — это самый простой и самый надежный из имеющихся электродвигателей. Эти электродвигатели переменного тока состоят из двух электрических узлов: статора с обмоткой и узла ротора. Электрический ток, необходимый для вращения ротора, создается за счет электромагнитной индукции, создаваемой обмоткой статора. Асинхронные двигатели являются одними из наиболее часто используемых типов двигателей в мире.
используются в различных сферах, включая насосы для предприятий общественного питания, водонагреватели, садовое и газонное оборудование и многое другое.
Подробнее о двигателях постоянного тока
Энергия, используемая двигателем постоянного тока, поступает от батарей или другого генерируемого источника энергии, обеспечивающего постоянное напряжение. Двигатели постоянного тока состоят из нескольких частей, наиболее известными из которых являются подшипники, валы и редуктор или шестерни. Двигатели постоянного тока обеспечивают лучшее изменение скорости и управление, а также обеспечивают больший крутящий момент, чем двигатели переменного тока.
К двум типам двигателей постоянного тока относятся:
- Матовый: Один из самых старых типов двигателей, щеточные двигатели — это электродвигатели с внутренней коммутацией, работающие от постоянного тока. Щеточные двигатели состоят из ротора, щеток, оси, а заряд и полярность щеток управляют направлением и скоростью двигателя.
- Бесщеточный: В последние годы бесщеточные двигатели приобрели популярность во многих сферах применения, в основном из-за их эффективности.Бесщеточные двигатели устроены так же, как и щеточные двигатели, за исключением, конечно, щеток. Бесщеточные двигатели также включают специализированную схему для управления скоростью и направлением. В бесщеточных двигателях вокруг ротора установлены магниты, что повышает эффективность.
используются в широком спектре приложений, включая электрические инвалидные коляски, ручные распылители и насосы, кофеварки, внедорожное оборудование и многое другое.
Что такое двигатель переменного тока и как он работает?
Большинство бытовых приборов, оборудования и инструментов, которые мы используем ежедневно, работают от двигателя переменного тока.Все, что можно подключить, скорее всего, будет работать от двигателя переменного тока. Вот почему двигатели переменного тока можно назвать сердцем многих машин, которые мы используем каждый день. Это источник питания для ряда приложений благодаря своей гибкости, эффективности и бесшумной работе.
Что такое двигатель переменного тока?
Двигатель переменного тока — это электродвигатель, в котором используется явление электромагнитной индукции. Этот электродвигатель приводится в действие «переменным током». Это тип электрического тока, который периодически меняет направление и непрерывно меняет свою величину со временем.Этот ток отличается от постоянного тока, или «постоянного тока», который течет только в одном направлении. Из простого входного электрического сигнала двигатель переменного тока может предложить сравнительно эффективный метод производства механической энергии.
Двигатель переменного тока обычно состоит из двух основных частей: статора и ротора. Статор остается снаружи, что является неподвижной частью двигателя. Он имеет катушки и питается переменным током для создания вращающегося магнитного поля. Внутри остается ротор, который является вращающейся частью двигателя.Он создает второе вращающееся магнитное поле, будучи прикрепленным к выходному валу. Магнитное поле ротора могут создаваться постоянными магнитами, реактивным сопротивлением или электрической обмоткой.
Как работает двигатель переменного тока?
Чтобы получить общее представление о том, как именно работает двигатель переменного тока, нам необходимо знать его основные характеристики. Двигатель переменного тока отличается от многих других типов двигателей, особенно двигателей постоянного тока. Но основной причиной этого является тот факт, что он специально работает на переменном токе.Переменный ток или заряд — это ток, направление потока в цепи которого меняется на обратное через равные промежутки времени. Это также означает, что напряжение в цепи переменного тока периодически изменяется, в то время как в цепи постоянного тока остается относительно постоянным.
Теперь двигатель переменного тока полагается на устройство, называемое генератором переменного тока, для создания этого переменного направления заряда. Это специализированный тип электрического генератора. Когда электричество проходит через вращающийся вал, в этом генераторе обычно создается ротор, электромагнитное поле или ЭДС.Между тем, статор вращается вокруг себя или внутри набора статических катушек из проволоки. Когда ротор вращается относительно статора, результирующая ЭДС переключает направление или полярность в заданных точках относительно статора.
Это происходит потому, что он создается заряженным ротором, вращающимся на фиксированной оси. В результате переключения полярности периодическое изменение направления тока в двигателе переменного тока происходит через регулярные и предсказуемые интервалы. Все это можно сравнить с поршнем или лопастью, перемещающей воду по системе воздуховодов.Когда поршень перемещает воду внутрь и наружу с постоянной скоростью, он, в свою очередь, толкает воду вперед и назад по трубопроводу.
Хотя двигатель переменного тока имеет простую конструкцию, как и двигатель с магнитным приводом — статор с медной обмоткой и роторный механизм. Но электродвигатель переменного тока — это недорогой и высокоэффективный механизм, который используется в большом количестве приложений. Где бы ни использовались электроприборы, электродвигатели переменного тока находят свое применение от тяжелой промышленности до бытовых сред, независимо от их типов и категорий.
Также читайте: Типы двигателей переменного тока и их применение
Типы электродвигателей и их применение
Электродвигатель — это электромеханическое устройство, преобразующее электрическую энергию в механическую. В основном существует три типа электродвигателей: электродвигатели переменного тока (синхронные и асинхронные электродвигатели), электродвигатели постоянного тока (щеточные и бесщеточные) и электродвигатели специального назначения.
Каков принцип работы электродвигателя?
- Когда проводник с током находится во внешнем магнитном поле, перпендикулярном проводнику, на проводник действует сила, перпендикулярная ему самому и внешнему магнитному полю.
- Правило правой руки для силы, действующей на проводник, можно использовать для определения направления силы, действующей на проводник: если большой палец правой руки указывает в направлении тока в проводнике, а пальцы силы на проводнике кондуктор направлен наружу от ладони правой руки.
- Аналоговые электросчетчики (т. Е. Гальванометр, амперметр, вольтметр) работают по моторному принципу. Электродвигатели — важное применение моторного принципа.
Строительство
Электродвигатель состоит из постоянного внешнего полевого магнита (статора) и спирального проводящего амперметра (ротора), который может свободно вращаться внутри полевого магнита. Щетки и коммутатор (сконструированный по-разному, если на якорь подается переменный или постоянный ток) подключаются к якорю к внешнему источнику напряжения. Скорость вращения двигателя зависит от силы тока, протекающего через него, количества катушек на якоре, силы полевого магнита, проницаемости якоря и механической нагрузки, связанной с валом.
Типы электродвигателей
В целом электродвигатели подразделяются на два типа (электродвигатели переменного тока и электродвигатели постоянного тока).
Сейчас!
Подробно узнаем о подтипах двигателей переменного тока и двигателей постоянного тока.
Типы двигателей переменного тока
Синхронные двигатели
Есть два типа синхронных двигателей.
- Обычная
- Супер
Двигатели асинхронные
-
Асинхронные двигатели
-
Коллекторные двигатели
- Серия
- С компенсацией
- Шунт
- Отталкивание
- Индукция запуска отталкивания
- Индукция отталкивания
Классификация по виду тока
Классификация по скорости работы
- Постоянная скорость.
- с переменной скоростью.
- Регулируемая скорость.
Классификация по конструктивным особенностям
- Открыть
- Закрытый
- Полузакрытый
- вентилируемый
- Трубопровод вентилируемый
- Заклепка рама-проушина и т. Д.
Типы двигателей постоянного тока
Наиболее распространенные типы двигателей постоянного тока —
- Двигатели с постоянными магнитами
- Матовый электродвигатель постоянного тока
- Двигатель постоянного тока с параллельной обмоткой
- Двигатель постоянного тока с последовательной обмоткой
- Составной двигатель постоянного тока
- Суммарное соединение
- Дифференциальное соединение
- Двигатель постоянного тока с постоянным магнитом
- Отдельно возбужденный
- Бесщеточный двигатель постоянного тока
- Двигатели постоянного тока без сердечника или железа
- Электродвигатели постоянного тока с печатным рисунком якоря или блинчика
- Универсальные моторы
Двигатель постоянного тока
В общем, двигатели постоянного тока наиболее желательны в двух ситуациях.Первый — это когда единственная доступная энергия — это постоянный ток, который встречается в автомобилях и небольших устройствах с батарейным питанием. Другой — когда кривую крутящего момента-скорости необходимо тщательно подправить. По мере развития технологий и манипуляций с двигателями переменного тока этот аспект становится менее важным, но исторически двигатель постоянного тока легко настраивался, что делало его подходящим для сервоприводов и тяговых устройств. С относительной скоростью высокого тока и низкого напряжения. Разновидностями стандартного двигателя постоянного тока являются силовой и бесщеточный двигатель постоянного тока, который представляет собой очень сложное устройство по сравнению со стандартным двигателем.Двигатели постоянного тока используются в приложениях, требующих управления скоростью или положением, и когда требуется высокий пусковой момент, поскольку двигатели переменного тока испытывают трудности в этой области.
Смотрите также:
Двигатели с постоянными магнитами
- Двигатель с постоянными магнитами (PM) отличается от двигателя постоянного тока с возбужденным полем в одном отношении: двигатель с постоянным магнитным полем получает свое поле от постоянного магнита, тогда как в двигателе постоянного тока с возбужденным полем поле создается, когда ток возбуждения протекает через катушки возбуждения.
- В двигателе с возбужденным полем магнитный поток остается постоянным только до тех пор, пока постоянным остается ток возбуждения. Но, напротив, в двигателе с постоянными магнитами поток всегда постоянный.
- Мощность, производимая любым двигателем, определяется по формуле:
Где, P ° = выходная мощность (л.с.)
T = крутящий момент (фунт-фут)
N rt = частота вращения ротора (об / мин)
- Таким образом, выходная мощность пропорциональна произведению крутящего момента и скорости.
Двигатели с постоянными магнитами можно разделить на 3 типа:
- Обычный двигатель с постоянными магнитами
- Двигатель с подвижной катушкой
- Бесщеточный двигатель постоянного тока
Обычный двигатель с постоянными магнитами
Обычные электродвигатели с постоянными магнитами включают в себя узел ротора, имеющий полюсные постоянные магниты, связанные со ступицей ротора и заключенные в немагнитную металлическую втулку. Обычные узлы ротора включают немагнитный материал, например пластик, между каждым из постоянных магнитов, чтобы поддерживать желаемую ориентацию постоянных магнитов на ступице ротора.Посадка с натягом между металлической втулкой и постоянными магнитами плотно прилегает к ротору.
Ротор с подвижной катушкой
Двигатель с подвижной катушкой (MCM), хотя и является двигателем с постоянными магнитами, отличается от обычного двигателя с постоянными магнитами в первичной обмотке якоря. MCM является результатом инженерного требования, чтобы двигатели имели высокий крутящий момент, низкую инерцию ротора и низкую электрическую постоянную времени. Эти требования выполняются в MCM.
Моментный двигатель
Можно утверждать, что все двигатели вырабатывают крутящий момент.Следовательно, все двигатели можно назвать моментными двигателями. Однако моментный двигатель отличается от других двигателей постоянного тока тем, что он должен работать в течение длительных периодов времени в условиях остановки или низкой скорости. Не все двигатели постоянного тока предназначены для этой операции. Низкая ЭДС означает, что будет протекать большой ток якоря. Большинство обычных двигателей постоянного тока не предназначены для рассеивания тепла, создаваемого этим большим током. Но моментные двигатели предназначены для работы на низкой скорости или в условиях остановки в течение длительных периодов времени и используются в таких приложениях, как намотка или ленточные накопители.В намоточных устройствах натяжение часто регулируется моментным двигателем.
Шаговый двигатель
- Шаговый двигатель — это действительно цифровой двигатель.
- После того, как ротор сделает шаг, он останавливается, пока не получит импульс.
- Шаговый двигатель — это электромеханическое устройство, преобразующее электрические импульсы в дискретные механические движения.
- Вал или шпиндель шагового двигателя вращается с дискретными шагами при подаче на него электрических командных импульсов в правильной последовательности.
- Вращение двигателя напрямую связано с этими приложенными входными импульсами.
- Последовательность подаваемых импульсов напрямую зависит от направления вращения вала двигателя. Скорость вращения валов двигателя зависит от частоты входных импульсов, а длина вращения напрямую связана с количеством подаваемых входных импульсов.
Связанные темы
Что такое электродвигатель?
Все, что превращает электричество в движение, то есть электрическую энергию в механическую, называется электродвигателем .Электродвигатели везде! Почти каждое механическое движение, которое вы видите вокруг себя, может быть создано электродвигателем.
Из-за почти неограниченного числа применений электродвигателей нетрудно представить, что во всем мире работают сотни миллионов двигателей. Давайте разберемся, что это такое и как они работают.
Как работают электродвигатели?
Электродвигателиработают по очень простому принципу: когда электричество и магнетизм объединяются в одну силу, это называется электромагнитной силой .Электродвигатели поэтому работают на принципах электромагнетизма. Когда электрический ток вводится в магнитное поле, создается сила. В электродвигателе используется витых проводов — тех же самых проводов, по которым протекает ток, — которые расположены под прямым углом к магнитному полю в электродвигателе. Поскольку магнитное поле имеет двойную полярность, каждый конец проводов перемещается в другом направлении. Это создает поворотное движение.
Крутящий момент , который представляет собой способность вращающегося элемента преодолевать сопротивление вращению, регулируется путем добавления нескольких петель к якорям, а магнитное поле создается с помощью электромагнита.Такая конструкция позволяет вращать ротор простой электромеханической силой. Очень мало деталей, которые действительно изнашиваются, и, с учетом этих двух факторов, электродвигатели могут продолжать работать в течение невероятно долгого времени при очень небольшом износе.
Действительно, одна из самых замечательных особенностей электродвигателей заключается в том, что они содержат очень мало деталей. По сравнению, например, с двигателем внутреннего сгорания, электродвигатель представляет собой простое устройство.Фактически, все различные части электродвигателя можно легко вытащить и разложить на очень маленьком столе, конечно, в зависимости от размера двигателя.
Стационарная часть электродвигателя называется статором . Статор будет снабжен постоянными магнитами или обмотками, в зависимости от технологии двигателя. Обмотки покажутся знакомыми любому, кто имеет опыт работы с другими электрическими компонентами. Обычно они представляют собой простые намотки проволоки на сердечник из магнитного железа.Когда через эти обмотки пропускается ток, они создают магнитное поле.
Ротор — это деталь, которая фактически преобразует электрическую энергию в механическую. Они бывают разного дизайна. Одним из самых больших прорывов в конструкции электродвигателя было обнаружение способа, которым ротор мог работать непрерывно, обеспечивая непрерывный крутящий момент для всего, что приводилось в действие электродвигателем. Современные электродвигатели способны создавать невероятный крутящий момент.Между тем, коммутатор — это устройство, которое используется для переключения входа электродвигателя.
Если вернуться в историю, электродвигатели, как и многие другие электрические устройства, начинали как простые эксперименты, а затем использовали их в качестве демонстрационных устройств, пока не нашли практическое применение.
Очень краткая история электродвигателя
В 1821 году британский ученый Майкл Фарадей объяснил преобразование электрической энергии в механическую, поместив проводник с током в магнитное поле, что привело к вращению проводника из-за крутящего момента, создаваемого взаимным действием электрического тока и поле.Самой примитивной из машин была машина постоянного тока (постоянного тока), разработанная другим британским ученым Уильямом Стердженом в 1832 году. Но его модель была слишком дорогой и не использовалась для каких-либо практических целей. Позже, в 1886 году , первый электродвигатель , способный вращаться с постоянной скоростью при различных нагрузках, был изобретен ученым Фрэнком Джулианом Спрагом .
Эволюция электродвигателя
Сегодня на рынке представлено несколько различных типов электродвигателей.Во-первых, их можно различить по тому, используют ли они мощность переменного или постоянного тока в качестве средства активации двигателя. Электродвигатели переменного тока приводятся в действие переменным током, например синхронный двигатель, который всегда работает с синхронной скоростью . Здесь ротор представляет собой электромагнит, который магнитно заблокирован вращающимся магнитным полем статора и вращается вместе с ним. Скорость этих машин варьируется путем изменения частоты (f) и числа полюсов (P).
Асинхронные двигатели— это взаимодействие магнитного поля и циркулирующих токов, при котором ротор запускается и продолжает вращаться.Асинхронные двигатели , также известные как асинхронные двигатели , работают со скоростью, немного меньшей, чем синхронная скорость. Существуют и другие типы электродвигателей, такие как серводвигатели со специальными характеристиками, такими как высокий крутящий момент в компактной конструкции или высокие динамические характеристики, которые были разработаны в соответствии с потребностями отрасли. Обычно в роторе этих двигателей встроен постоянный магнит из редкоземельных элементов.
Как запустить электродвигатель?
В электродвигателяхиспользуются различные пусковые механизмы.В простейшем и самом маленьком типах пускатель может подключаться напрямую к электросети. Он также известен как Direct On Line (DOL) . Для более крупных двигателей требуются более сложные устройства, такие как устройства плавного пуска .
Устройство плавного пуска позволяет оператору запускать устройство с пониженным напряжением. Пользователь может определить пределы пускового тока и других переменных. Пускатель звезда-треугольник — это тип устройства плавного пуска, который постепенно увеличивает напряжение до максимальной нагрузки по мере увеличения скорости двигателя.Преимущество плавного пуска заключается в том, что можно контролировать механическое напряжение и выходной крутящий момент на нагрузке. Вместо того, чтобы двигатель внезапно взлетал с полным крутящим моментом и скоростью, как в случае с прямым стартером, двигатель постепенно набирает обороты.
Частотно-регулируемые приводы и электродвигатели
Приводы с регулируемой скоростью все чаще используются с трехфазными асинхронными двигателями. Эти контроллеры используются в электродвигателях всех размеров. Самым значительным преимуществом является то, что они предлагают высочайшую степень контроля и функциональности.В промышленных условиях предлагаемый ими контроль над крутящим моментом, натяжением, ускорением и потоком может способствовать повышению эффективности и управляемости процессов. В приводы также встроены многие функции, такие как автоматизация и ПЛК, средства связи, полевые шины, управление безопасностью и т. Д.
Электродвигатели можно найти во множестве областей применения. Все: от насосов, компрессоров, вентиляторов, башенных кранов и погрузочно-разгрузочных работ, текстиля, печати, упаковки, деревообрабатывающего оборудования и испытательных стендов — все использует свои возможности.Они являются одними из наиболее распространенных используемых сегодня электрических компонентов, поэтому справедливо сказать, что электродвигатели сильно повлияли на нашу повседневную жизнь.
