Возможно ли создать асинхронный двигатель, работающий на постоянном токе. Какие есть технические ограничения для такой конструкции. Какие альтернативные решения существуют для питания асинхронных двигателей от источников постоянного тока.
Возможен ли асинхронный двигатель постоянного тока?
Строго говоря, создать классический асинхронный двигатель, работающий напрямую от постоянного тока, невозможно. Принцип работы асинхронного двигателя основан на создании вращающегося магнитного поля с помощью переменного тока. При подаче постоянного тока вращающееся магнитное поле не возникает.
Однако существуют технические решения, позволяющие питать асинхронные двигатели от источников постоянного тока. Рассмотрим основные варианты:
Использование инвертора для преобразования постоянного тока в переменный
Наиболее распространенный способ — это применение инвертора, который преобразует постоянный ток в переменный трехфазный ток нужной частоты. Такая схема позволяет запитать обычный асинхронный двигатель от аккумулятора или другого источника постоянного тока.

Преимущества данного решения:
- Возможность использования стандартных асинхронных двигателей
- Плавная регулировка скорости вращения за счет изменения частоты
- Высокий КПД при правильно подобранных компонентах
Недостатки:
- Необходимость дополнительного преобразователя
- Потери энергии при преобразовании
- Сложность схемы управления
Электронно-коммутируемые двигатели (ЭКД)
Электронно-коммутируемые двигатели представляют собой гибрид между асинхронными и синхронными двигателями. Они могут работать напрямую от постоянного тока, но имеют электронный блок управления для создания вращающегося магнитного поля.
Ключевые особенности ЭКД:
- Питание от постоянного тока без дополнительных преобразователей
- Высокий КПД и широкий диапазон регулирования скорости
- Компактные размеры при высокой мощности
- Сложная и дорогая система управления
Двигатели с постоянными магнитами
Двигатели с постоянными магнитами иногда ошибочно называют «асинхронными двигателями постоянного тока». На самом деле это отдельный класс двигателей, сочетающий черты коллекторных и бесколлекторных машин.
Основные характеристики:
- Простота конструкции ротора с постоянными магнитами
- Высокий крутящий момент
- Возможность прямого питания от источника постоянного тока
- Необходимость в электронном коммутаторе для управления
Технические ограничения асинхронных двигателей постоянного тока
Попытки создать классический асинхронный двигатель, работающий напрямую от постоянного тока, сталкиваются со следующими фундаментальными ограничениями:
- Отсутствие вращающегося магнитного поля при постоянном токе
- Невозможность индуцировать токи в роторе без переменного поля
- Сложность создания скольжения между полем статора и ротором
- Низкий КПД при попытках механической коммутации
Альтернативные решения для питания асинхронных двигателей от постоянного тока
Помимо рассмотренных выше вариантов, существуют и другие способы адаптации асинхронных двигателей для работы от источников постоянного тока:
Использование мотор-генераторных установок
В этом случае двигатель постоянного тока вращает генератор переменного тока, питающий асинхронный двигатель. Такая схема неэффективна, но иногда применяется в специальных установках.

Применение вращающихся преобразователей
Вращающийся преобразователь представляет собой электромеханическое устройство для преобразования постоянного тока в переменный. Он состоит из двигателя постоянного тока и соединенного с ним генератора переменного тока.
Использование статических преобразователей
Современные полупроводниковые преобразователи позволяют эффективно преобразовывать постоянный ток в переменный для питания асинхронных двигателей. Это могут быть как простые инверторы, так и сложные системы с микропроцессорным управлением.
Преимущества и недостатки различных решений
Рассмотрим сравнительные характеристики описанных выше вариантов питания асинхронных двигателей от источников постоянного тока:
| Решение | Преимущества | Недостатки |
|---|---|---|
| Инвертор |
— Использование стандартных двигателей — Широкий диапазон регулирования |
— Дополнительные потери в преобразователе — Сложность схемы управления |
| ЭКД |
— Высокий КПД — Компактность |
— Высокая стоимость — Сложное управление |
| Двигатели с постоянными магнитами |
— Простота конструкции — Высокий момент |
— Ограниченный диапазон регулирования — Необходимость в коммутаторе |
Области применения асинхронных двигателей с питанием от постоянного тока
Несмотря на технические сложности, существует ряд областей, где применение асинхронных двигателей с питанием от источников постоянного тока оправдано:
- Электротранспорт (электромобили, электробусы)
- Автономные системы электроснабжения
- Солнечные и ветровые электростанции
- Специальное промышленное оборудование
- Военная и космическая техника
Перспективы развития технологий асинхронных двигателей постоянного тока
Развитие технологий в области силовой электроники и систем управления открывает новые возможности для создания эффективных асинхронных двигателей, работающих от источников постоянного тока. Основные направления исследований:
- Совершенствование алгоритмов управления инверторами
- Разработка новых магнитных материалов
- Создание гибридных конструкций двигателей
- Оптимизация энергетических характеристик преобразователей
Эти разработки позволят расширить области применения асинхронных двигателей в системах с автономным питанием и повысить их энергоэффективность.
Замена двигателей постоянного тока на асинхронные двигатели переменного тока
Промышленные двигатели постоянного тока начали выпускаться в 1860—1870 гг., чему предшествовал 30-летний период их разработки после фундаментальных открытий М. Фарадея (закона электромагнитной индукции и превращения электрической энергии в механическую).
Двигатели постоянного тока широко применяются и в наше время благодаря использованию современных тиристорных преобразователей, которые позволяют осуществлять регулирование скорости данных двигателей путем изменения напряжения на якоре или в обмотках возбуждения. Для расширения диапазона регулирования скорости используются различные сигналы обратной связи (напряжение на якоре, тахогенераторы и т.д.). Однако эксплуатация двигателей постоянного тока влечет за собой ряд значительных неудобств, связанных с конструктивными особенностями машин данного типа, а именно:
1. Сложность конструкции и, как результат, высокая цена
2.
3. Большая масса
4. Необходимость в периодическом обслуживании
Все эти недостатки требуют существенных затрат при покупке машин постоянного тока и их дальнейшей эксплуатации, а так же они могут значительно снизить надежность и точность систем в целом. Необходимо планировать дополнительные планово-предупредительные работы и останавливать производство для обслуживания щеточно-коллекторных узлов и проводить периодическую продувку машин от пыли.
До недавнего времени внедрение асинхронных двигателей (АД) с короткозамкнутыми роторами в системы, где требуется широкий диапазон регулирования скорости, не представлялось возможным, а для изменения скорости движения приводимых механизмов использовались переключаемые редукторы или вариаторы. Дальнейшим развитием таких систем стало появление асинхронных двигателей с переключением числа полюсов (двух и трех скоростные двигатели), что позволяло ступенчато изменять скорость вращения.
С развитием полупроводниковой электроники (разработка IGBT транзисторов), появилась возможность производства недорогих микропроцессорных преобразователей частоты, с помощью которых стало возможным полноценно управлять скоростью асинхронных двигателей в широком диапазоне регулирования (1:1000). Теперь частота вращения АД не зависит от частоты питающей сети, двигатели можно разгонять выше их номинальной скорости. Так же появилась возможность управления моментом асинхронных двигателей. Системы управления движением с использованием асинхронных двигателей и преобразователей частоты, получаются дешевле и проще подобных систем с двигателями постоянного тока. В качестве датчиков обратной связи широко используются цифровые устройства (энкодеры), которые менее подвержены влиянию электромагнитных помех, чем тахогенераторы, классически используемые с машинами постоянного тока.
Асинхронный двигатель – простая, недорогая, не требующая обслуживания машина. Именно эти аргументы привели к тому, что на многих предприятиях машины постоянного тока с тиристорными преобразователями стали заменять на асинхронные двигатели с системами управления, построенными на преобразователях частоты.
При подборе асинхронного двигателя взамен машины постоянного тока необходимо учитывать разность характеристик этих машин. Подбор двигателя осуществляется по следующим параметрам:
1. По номинальной скорости вращения
Диапазон изменения частоты вращения вала асинхронного двигателя должен быть равен или больше чем у двигателя постоянного тока.
2. По моменту (номинальному, пусковому, максимальному)
Номинальный момент асинхронного двигателя должен быть равен или быть больше исходного при условии длительной работы в заданном диапазоне частот вращения без перегрева. Максимальный и пусковой моменты должны быть равны или быть больше пускового момента определенного для данного механизма.
На рисунке 1 и 2 представлены механические характеристики асинхронного двигателя и двигателя постоянного тока соответственно. Как видно, на малых скоростях асинхронный двигатель имеет момент значительно меньше номинального в отличие от двигателя постоянного тока. Поэтому при замене двигателя постоянного тока необходимо однозначно определить диапазон скорости вращения вала и требуемый момент в этом диапазоне. Как правило, для удовлетворения механических характеристик приводного механизма, приходится ставить асинхронный двигатель большей мощности.
Поэтому при замене двигателя постоянного тока необходимо однозначно определить диапазон скорости вращения вала и требуемый момент в этом диапазоне. Как правило, для удовлетворения механических характеристик приводного механизма, приходится ставить асинхронный двигатель большей мощности.
Рис.1 Механическая характеристика асинхронного двигателя
Рис.2 Механическая характеристика двигателя постоянного тока
3. По режиму работы
Нагрев электрической машины зависит от режима ее работы, т.е. от соотношения длительности периодов работы и пауз между ними, или периодов работы с полной или частичной нагрузкой, от частоты включения машины и характера протекания переходных процессов.
Подразделяют следующие режимы работы:
Продолжительный режим (S1) — режим при котором время работы машины при практически неизменных нагрузке и температуре окружающей среды достаточно для нагрева всех ее частей до практически установившейся температуры.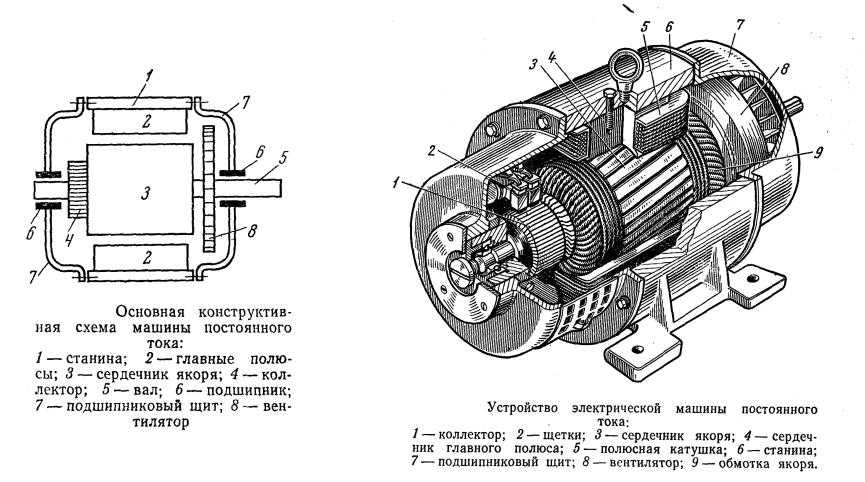 Режим характеризуется неизменными потерями в течение всего времени работы машины.
Режим характеризуется неизменными потерями в течение всего времени работы машины.
Кратковременный режим (S2) — режим при котором периоды неизменной нагрузки чередуются с периодами отключения машины, причем за время работы температура частей машины не успевает достигнуть установившегося значения, а за время пауз машина охлаждается до холодного состояния.
Повторно-кратковременный режим (S3-S8) — отличается от кратковременного регламентированными продолжительностью включения под неизменную нагрузку и продолжительностью периодов отключения, причем время работы машины всегда меньше времени, необходимого для нагрева ее частей до установившейся температуры, а время пауз меньше необходимого для остывания машины до практически холодного состояния. Отличие между режимами S3-S8 заключается частотой пусков и продолжительностью включения машины.
4. По условиям эксплуатации
Согласно ГОСТ 17498-87 асинхронный двигатель должен иметь соответствующую степень защиты IPXX, где первый символ X означает степень защиты оболочкой, от проникновения инородных твердых тел, второй символ X означает степень защиты оболочкой от вредных воздействий проникающей воды. Например, IP54 — “Машина не полностью защищена от проникновения внутрь оболочки пыли (однако, пыль не может проникать в количестве, достаточном для нарушения работы изделия) и воды, разбрызгиваемой на оболочку в любом направлении”.
Например, IP54 — “Машина не полностью защищена от проникновения внутрь оболочки пыли (однако, пыль не может проникать в количестве, достаточном для нарушения работы изделия) и воды, разбрызгиваемой на оболочку в любом направлении”.
По всем вопросам, касательно данного применения обращайтесь в ООО «Драйвика» по тел. 8 (812) 635 90 30 или Email: [email protected]
Асинхронные двигатели популярно | Публикации
В этой научно-популярной обзорной статье рассмотрим некоторые вопросы, которые позволят читателю расширить и закрепить свои знания о мире двигателей.
Экспресс-знакомство
В настоящее время на практике в подавляющем большинстве случаев применяют асинхронные электродвигатели с короткозамкнутым ротором. Они имеют сравнительно простую конструкцию, и относительно недороги.
Для работы асинхронного двигателя нужно обязательно трехфазное напряжение, которое, благодаря обмоткам статора, создает вращающееся магнитное поле внутри двигателя. Это поле вращает ротор двигателя, который, в свою очередь, передает вращение на нагрузку. Например, редуктор или лопасти вентилятора.
Например, редуктор или лопасти вентилятора.
Изменяя конфигурацию обмоток статора (количество пар полюсов), можно менять основную характеристику асинхронного двигателя — частоту оборотов. Мощность на валу двигателя зависит от мощности, получаемой электродвигателем от сети.
Другие виды
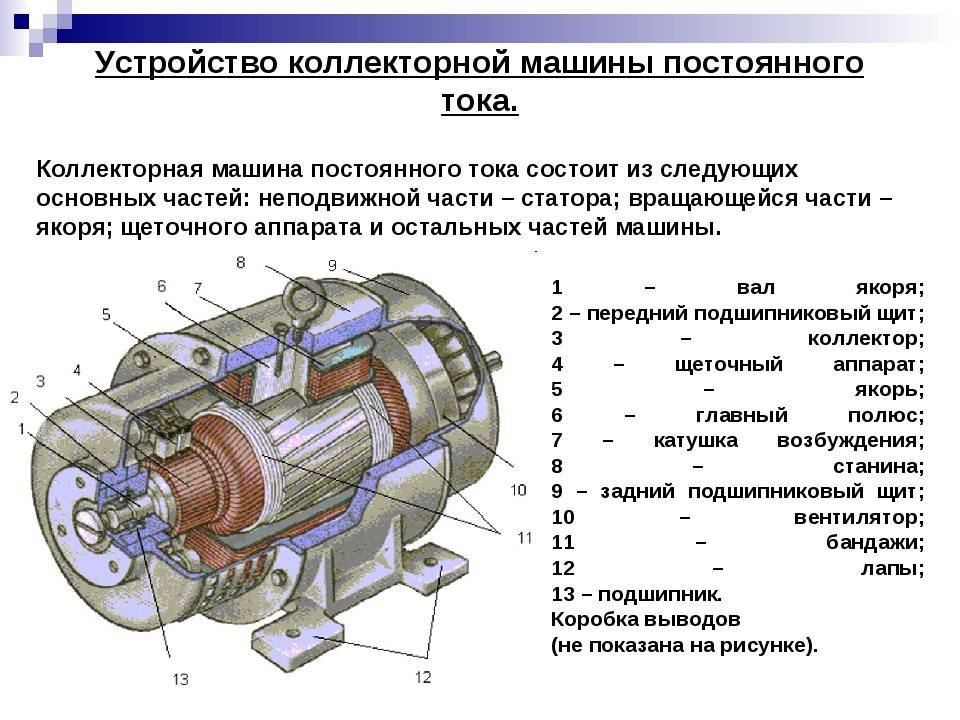
Другие двигатели, которые в настоящее время также находят применение — это электродвигатели постоянного тока. Они имеют щетки (рисунок 1), которые подвержены износу и искрению. Также, необходима обмотка подмагничивания (возбуждения), на которую подается постоянное напряжение. Несмотря на эти недостатки, электродвигатели постоянного тока находят применение там, где нужно быстрое изменение скорости вращения и контроль момента, а также при мощностях более 100 кВт.
Рисунок 1. Электродвигатель постоянного тока.
В быту также применяют коллекторные (щеточные) электродвигатели переменного тока, которые имеют низкую надежность по сравнению с асинхронными.
Другие типы двигателей — серводвигатели и шаговые двигатели — применяют сравнительно редко в случаях, когда необходимо сверхточное позиционирование нагрузки на валу. Например, в координатных станках.
В однофазной сети
Мы уже говорили выше, что для работы асинхронного двигателя нужно вращающееся магнитное поле, которое обеспечивается трехфазным напряжением.
Однако, часто есть необходимость питать такой двигатель от бытовой однофазной сети 220 В. В случае работы асинхронного двигателя в однофазной сети применяют фазосдвигающие и пусковые конденсаторы. При этом получают подобие трехфазной питающей сети. Номинальную мощность на валу получить не получится, приходится рассчитывать на 70–80% от номинала.
Это происходит из-за того, что не удается обеспечить отсутствие перекоса по фазам при изменении нагрузки.
Способы управления
Управление электродвигателем подразумевает возможность изменения его скорости и мощности (момента). Так, если на асинхронный двигатель подать напряжение нужной величины и частоты, он будет вращаться с номинальной частотой, и сможет обеспечить мощность на валу не более номинальной. Если же нужно понизить или повысить скорость электродвигателя, в основном применяют преобразователи частоты (ПЧ) — рисунок 2. Благодаря этому для двигателя можно обеспечить нужный режим разгона, торможения, а также управлять частотой работы оперативно, по желанию оператора оборудования.
Если же нужно понизить или повысить скорость электродвигателя, в основном применяют преобразователи частоты (ПЧ) — рисунок 2. Благодаря этому для двигателя можно обеспечить нужный режим разгона, торможения, а также управлять частотой работы оперативно, по желанию оператора оборудования.
Рисунок 2. Преобразователь частоты Schneider Electric.
Если нужно обеспечить требуемый разгон и торможение без изменения рабочей частоты, то применяют устройство плавного пуск (УПП). Если нужно управлять только разгоном двигателя для минимизации пусковых токов, то применяют схему включения «звезда-треугольник».
Для подачи питания на двигатель без ПЧ и УПП также широко применяются контакторы, которые позволяют дистанционно управлять пуском, остановом и реверсом.
Управление запуском
Запуск может происходить в простейшем случае от кнопки «Пуск». Но за этой кнопкой может скрываться, например, контроллер, который действует по сложной программе и выдает сигнал на запуск преобразователя частоты. Также кнопка запуска может быть непосредственно подключена ко входу управления ПЧ или УПП.
Также кнопка запуска может быть непосредственно подключена ко входу управления ПЧ или УПП.
В классическом варианте, когда двигатель запускается через контактор, кнопка «Пуск» подает питание на катушку контактора, контактор включается, и своим дополнительным (блокировочным) контактом становится на самоподхват.
Остановка производится кнопкой «Стоп», которая обычно имеет нормально замкнутые контакты.
Направление вращения
Реверс двигателя — важная функция в его управлении. Осуществляется реверс очень простым способом — нужно поменять местами любые две питающие фазы.
Реализуется это в контакторной схеме путем использования двух контакторов, каждый из которых имеет свой порядок фаз. Контакторы имеют обязательно механическую и электрическую блокировки, чтобы избежать возможности одновременного включения.
Вращение может быть прямым и обратным. Прямое вращение распознать очень просто. Стоит посмотреть двигателю «в зад», и, если вал крутится по часовой стрелке — это прямое вращение.
Как определить мощность
Иногда нужно на практике узнать, какой двигатель перед нами. Проще всего определить номинальную мощность электродвигателя по его шильдику (рисунок 3). На нем указана механическая мощность (мощность на валу), которая всегда меньше потребляемой мощности за счет КПД двигателя (потерь на трение и нагрев). Однако, если шильдик на корпусе двигателя отсутствует, то можно ориентировочно определить мощность по его габаритам. При одинаковой мощности при большем диаметре вала мощность навалу будет больше, а частота оборотов — меньше.
Рисунок 3. Шильда механической мощности двигателя.
Также, определить мощность можно по нагрузке, а также по уставкам защитных устройств, через которые питается двигатель (мотор-автомат, тепловое реле).
Другой способ — нужно включить двигатель на номинальную мощность, обеспечив нужную нагрузку на валу. После этого, померить токоизмерительными клещами ток двигателя, который должен быть по всем обмоткам одинаков.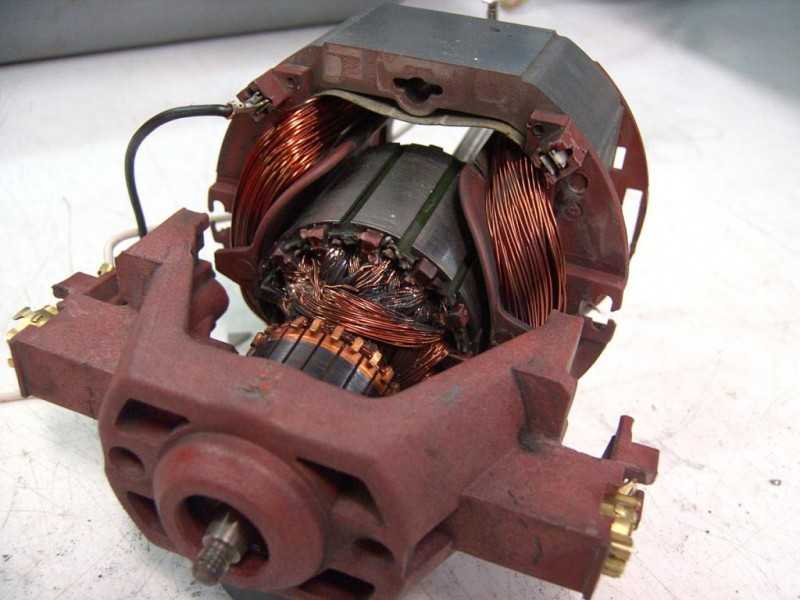 На основании измеренного тока можно оценить мощность двигателя. Приблизительно оценить мощность асинхронного двигателя, при подключении его по схеме «звезда» можно, разделив его номинальный измеренный ток на 2.
На основании измеренного тока можно оценить мощность двигателя. Приблизительно оценить мощность асинхронного двигателя, при подключении его по схеме «звезда» можно, разделив его номинальный измеренный ток на 2.
Регулировка оборотов
Управление скоростью вращения двигателем может быть в трех режимах работы — при разгоне, в рабочем режиме, и при торможении.
Наиболее универсальным способом управления оборотами двигателя во всех перечисленных режимах является применение преобразователя частоты. Настройками можно добиться любой частоты вращения в пределах технической возможности. При этом можно управлять и другими параметрами электродвигателя, а также следить за его состоянием во время работы. Частоту можно менять и плавно, и ступенчато. Возможно управление от дистанционного пульта или с контроллера по цифровому каналу связи.
Управление оборотами двигателя только в режиме разгона и торможения возможно при использовании УПП — рисунок 4. Это устройство позволяет значительно снизить пусковой ток за счет плавного разгона с медленным увеличением оборотов.
Рисунок 4. Устройство управление оборотами двигателя ABB.
Торможение
В некоторых устройствах, например, лифтах, крайне необходимо при остановке двигателя зафиксировать его вал в неподвижном состоянии. Для этого применяют электромагнитный механический тормоз, который закреплен в задней части двигателя и входит в его конструкцию.
Управление тормозом происходит от ПЧ или схемы на контакторах. Важно, чтобы это происходило синхронно с остановом двигателя.
Рисунок 5. Электродвигатель с тормозом с креплением через фланец.
На рисунке 5 показан электродвигатель с тормозом с креплением через фланец. Также применяют электрическое торможение постоянным током. Для этого через ПЧ или диодный выпрямитель подают на обмотки двигателя постоянное (однополярное) напряжение в 3–4 раз меньше номинального рабочего.
Неисправности
Большинство неисправностей электродвигателей проявляется их нагревом.
Причины неисправностей могут быть следующие:
- износ подшипников и повышенное механическое трение;
- увеличение нагрузки на валу;
- перекос напряжения питания;
- пропадание фазы;
- замыкание в обмотке из-за ухудшения изоляции;
- проблема с обдувом (охлаждением).
Неисправности электродвигателей можно разделить на два вида: электрические и механические.
К электрическим можно отнести неисправности, связанные с обмоткой:
- межвитковое замыкание;
- замыкание обмотки на корпус;
- обрыв обмотки.
Для устранения этих неисправностей требуется перемотка двигателя.
Механические неисправности:
- износ и трение в подшипниках;
- проворачивание ротора на валу;
- повреждение корпуса двигателя;
- проворачивание или повреждение крыльчатки обдува.
Замена подшипников должна производиться регулярно, учитывая их износ и срок службы. Повреждение крыльчатки устраняется путем ее замены. Остальные неисправности устранению практически не подлежат, и в таких случаях двигатель подлежит замене.
Остальные неисправности устранению практически не подлежат, и в таких случаях двигатель подлежит замене.
Защита
Как было сказано выше, основной причиной неисправностей двигателя является его перегрев. Сам перегрев, как правило, является следствием каких-либо аномальных электрических или механических режимов работы.
Следовательно, предотвратив перегрев, можно отключить и сохранить двигатель в исправном состоянии. Для этого используются три основных способа:
Электронный контроль тока — этот способ используется в электронных устройствах пуска двигателей — ПЧ и УПП. С помощью встроенного трансформатора тока происходит его измерение, а встроенный контроллер принимает решение об остановке двигателя.
Тепловой контроль тока. Для этого применяются устройства тепловой защиты — тепловые реле или защитные мотор-автоматы. В них имеется возможность выставить точно токовую уставку, при которой реле или автомат отключат питание двигателя.
Непосредственный контроль температуры корпуса и обмоток реализуется за счет терморезистора или термоконтакта, встроенного внутрь корпуса двигателя. Недостаток этого способа — большая инерционность, и его обычно применяют как дополнительный способ защиты.
Недостаток этого способа — большая инерционность, и его обычно применяют как дополнительный способ защиты.
Александр Ярошенко, автор блога SamElectric.ru
Сравнить двигатель постоянного тока и асинхронный двигатель
3.1kviews
Сравнить двигатель постоянного тока и асинхронный двигатель
промышленная электроника
ДОБАВИТЬ КОММЕНТАРИЙ РЕДАКТИРОВАТЬ
1 Ответ
221просмотров
| Старший № | Тема | Асинхронный двигатель | Двигатель постоянного тока | |
|---|---|---|---|---|
| 1 | Определение | Асинхронные двигатели можно определить как электродвигатель, который приводится в действие переменным током (AC). | Двигатели постоянного тока также представляют собой вращающийся электродвигатель, который преобразует постоянный ток (энергию постоянного тока) в механическую энергию. |
|
| 2 | Типы | Асинхронные двигатели в основном бывают двух типов: синхронные двигатели переменного тока и асинхронные двигатели. | Двигатели постоянного токатакже в основном бывают двух типов: двигатели постоянного тока со щетками и двигатели постоянного тока без щеток. | |
| 3 | Токовый вход | Асинхронные двигатели работают только при подаче на вход переменного тока. | Двигатели постоянного токабудут работать только при подаче постоянного тока. В случае двигателя серии постоянного тока двигатель может работать от сети переменного тока. Но для шунтовых двигателей двигатель никогда не работает от сети переменного тока. | |
| 4 | Коллекторы и щетки | В асинхронных двигателях отсутствуют коллекторы и щетки. | Коллекторы и угольные щетки присутствуют в двигателях постоянного тока. | |
| 5 | Входные фазы питания | Асинхронные двигатели могут работать как от однофазной, так и от трехфазной сети. |
Двигатели постоянного тока могут работать только от однофазного питания. | |
| 6 | Источники снабжения | Трехфазное или однофазное питание от питающей сети. | Энергия получается из батарей, элементов и т. д. | |
| 7 | Пуск двигателя | Трехфазный асинхронный двигатель запускается самостоятельно, но для однофазного двигателя переменного тока требуется пусковой механизм. | Двигатели постоянного токавсегда запускаются автоматически. | |
| 8 | Входные клеммы | В асинхронных двигателях присутствуют три входных клеммы (RYB). | В двигателях постоянного тока присутствуют две входные клеммы (положительная и отрицательная). | |
| 9 | Характеристики арматуры | В асинхронных двигателях якорь неподвижен, а магнитное поле вращается.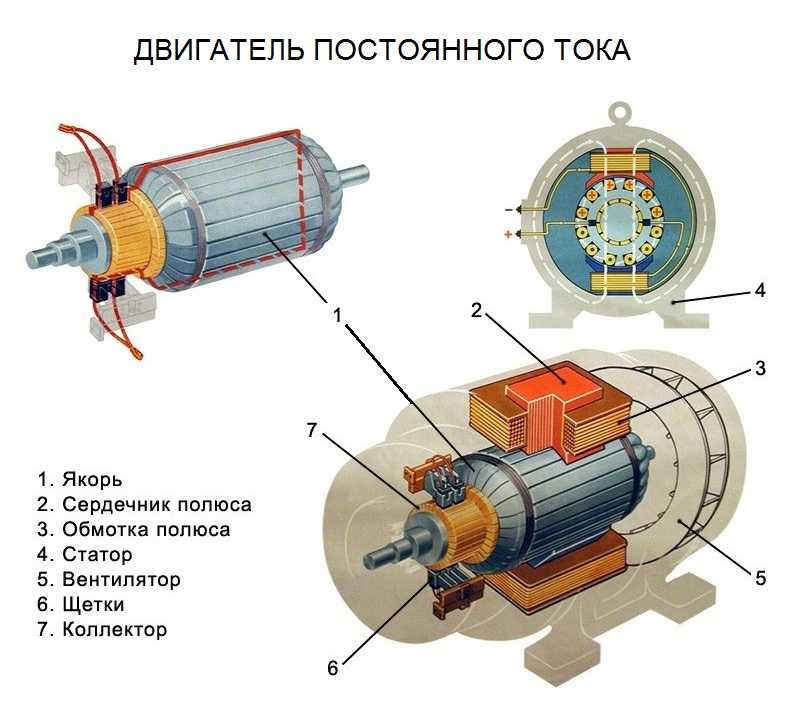 |
В двигателях постоянного тока якорь вращается, а магнитное поле остается неподвижным. | |
| 10 | Регулятор скорости | Скорость асинхронного двигателя можно изменить, изменив частоту. | В случае двигателей постоянного тока скорость можно регулировать, изменяя ток обмотки якоря. | |
| 11 | Изменение нагрузки | Асинхронные двигатели медленно реагируют на изменение нагрузки. | Двигатели постоянного токабыстро реагируют на изменение нагрузки. | |
| 12 | Запуск | Асинхронный двигатель не запускается самостоятельно. Для этого требуется некоторое внешнее пусковое оборудование. | Двигатели постоянного токаявляются самозапускающимися. | |
| 13 | Ожидаемая продолжительность жизни | Так как асинхронные двигатели не имеют щеток и коллекторов, они очень наворочены и имеют большой срок службы. |
Щетки и коллекторы в двигателях постоянного тока ограничивают скорость и сокращают срок службы двигателя. | |
| 14 | Эффективность | Из-за потери асинхронного тока и проскальзывания двигателя КПД асинхронного двигателя снижается. | Эффективность двигателя постоянного тока высока, так как отсутствует скольжение и потери индукционного тока. | |
| 15 | Техническое обслуживание | Асинхронные двигатели требуют меньше обслуживания, так как отсутствуют щетки и коллекторы. | Двигатели постоянного токатребуют чрезмерного обслуживания из-за наличия щеток и коллекторов. | |
| 16 | Приложения | Асинхронные двигатели требуются там, где требуется высокая скорость и переменный крутящий момент. | Двигатели постоянного тока требуются там, где требуется переменная скорость и высокий крутящий момент. |
|
| 17 | Практическое использование | В основном используются на крупных производствах. | В основном используются в небольших бытовых приборах. |
ДОБАВИТЬ КОММЕНТАРИЙ РЕДАКТИРОВАТЬ
Пожалуйста, войдите, чтобы добавить ответ.
Сообщество
- Пользователи
- Уровни
- Значки
Контент
- Все посты
- Теги
- Приборная панель
Компания
- О
- Команда
- Конфиденциальность
Отправьте ответы на бумажные вопросы и заработайте деньги
Возможны ли асинхронные двигатели постоянного тока?
\$\начало группы\$
Простите меня, если я спрашиваю что-то абсурдное, я действительно мало что понимаю в электродвигателях.
После прочтения ответов Почему в автомобиле Tesla используется двигатель переменного тока вместо двигателя постоянного тока? , мне стало любопытно:
Возможен ли асинхронный двигатель постоянного тока? Хотя бы теоретически?
- постоянного тока
- асинхронный двигатель
\$\конечная группа\$
2
\$\начало группы\$
Нет, асинхронный двигатель постоянного тока невозможен. Индукция подразумевает создание тока через магнитное поле. Это могут сделать только переменные магнитные поля. По той же причине трансформаторы не пропускают постоянный ток. С фиксированным магнитным полем не связана никакая постоянная мощность, а только некоторая фиксированная энергия, которая удерживает его там. Если бы это было не так, вы могли бы получать постоянную мощность от фиксированного постоянного магнита.
Индукция подразумевает создание тока через магнитное поле. Это могут сделать только переменные магнитные поля. По той же причине трансформаторы не пропускают постоянный ток. С фиксированным магнитным полем не связана никакая постоянная мощность, а только некоторая фиксированная энергия, которая удерживает его там. Если бы это было не так, вы могли бы получать постоянную мощность от фиксированного постоянного магнита.
Однако возможны настоящие двигатели постоянного тока. Фактически, первым настоящим непрерывно работающим электродвигателем был двигатель постоянного тока. Вы также можете заставить диск вращаться, пропуская постоянный ток через диск в радиальном направлении с фиксированным магнитным полем, перпендикулярным диску. Причина, по которой это обычно не делается, заключается в сложности электрического подключения к снаружи край вращающегося диска. Однако это можно сделать, и это было сделано.
Обратное тоже работает. Вращающийся диск с фиксированным магнитным полем, перпендикулярным ему, будет развивать радиальный потенциал (между осью и внешним краем). Были тахометры, основанные на этом принципе.
Были тахометры, основанные на этом принципе.
\$\конечная группа\$
3
\$\начало группы\$
Нет (ну… вроде как, но зря)
Все электрические машины нуждаются в переменном потоке для соединения магнитной энергии. Коллекторные машины постоянного тока производят это через коммутаторы. В основном это также AC, просто выставьте соединение, принимающее DC.
Так почему бы вам не иметь «асинхронную машину постоянного тока» Что ж, определяющими характеристиками асинхронной машины являются: статор переменного тока и ротор переменного тока и крутящий момент, генерируемый на любой другой скорости, кроме синхронной.
Если бы вы питали машину постоянным током, вам понадобился бы какой-нибудь коммутатор, чтобы взять этот постоянный ток и чередовать его для получения требуемого переменного тока.
Может ли этого переменного тока быть достаточно, чтобы возбудить ротор переменным полем? . .. конечно, что-то будет соединено, но это будет неэффективно, поскольку поле воздушного зазора машины постоянного тока больше прямоугольной формы.
.. конечно, что-то будет соединено, но это будет неэффективно, поскольку поле воздушного зазора машины постоянного тока больше прямоугольной формы.
Представьте, что сетевой трансформатор возбуждается прямоугольной волной, некоторая энергия преобразуется, но не так сильно, как если бы это был переменный ток
\$\конечная группа\$
\$\начало группы\$
Да: но квалифицировано. Существует класс асинхронных двигателей, который называется «двигатель с электрической коммутацией» или сокращенно «ECM». Если вы введете в Google строку «двигатель ECM», вы сможете узнать, как это делается и в чем преимущества.
\$\конечная группа\$
3
\$\начало группы\$
Да, это возможно, но не так эффективно. Для создания такого двигателя необходимо два коммутатора.
