Что такое асинхронный тахогенератор. Как устроен асинхронный тахогенератор. Для чего применяются асинхронные тахогенераторы в системах автоматики. Каковы преимущества и недостатки асинхронных тахогенераторов.
Что такое асинхронный тахогенератор и для чего он применяется
Асинхронный тахогенератор — это электрическая машина, преобразующая механическое вращение в электрический сигнал. Его основное назначение — измерение частоты вращения различных механизмов и машин.
Принцип действия асинхронного тахогенератора основан на явлении электромагнитной индукции. При вращении ротора в магнитном поле статора в обмотках индуцируется ЭДС, пропорциональная скорости вращения.
Основные области применения асинхронных тахогенераторов:
- Измерение частоты вращения электродвигателей, турбин, генераторов и других вращающихся механизмов
- Формирование сигнала обратной связи по скорости в системах автоматического регулирования
- Преобразование угловой скорости в электрический сигнал в различных измерительных системах
Устройство и принцип работы асинхронного тахогенератора
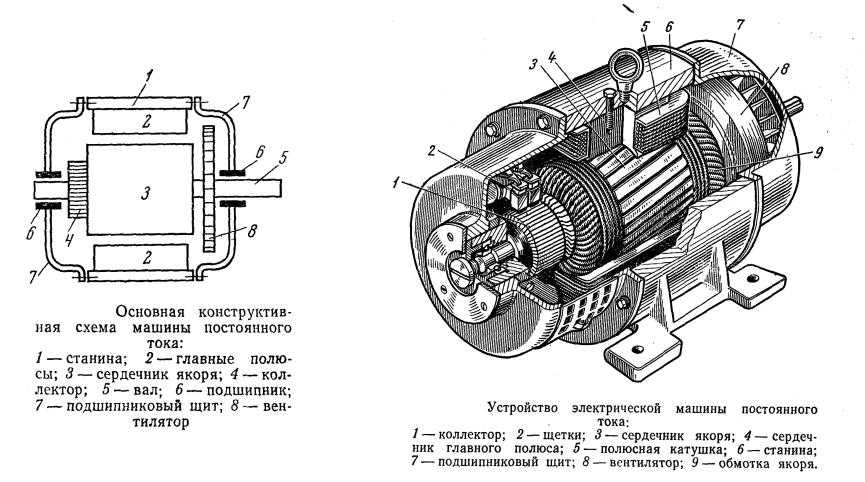
Конструктивно асинхронный тахогенератор состоит из следующих основных частей:

- Статор с двумя обмотками, сдвинутыми в пространстве на 90°
- Ротор в виде полого немагнитного цилиндра
- Подшипниковые щиты
- Вал для соединения с измеряемым механизмом
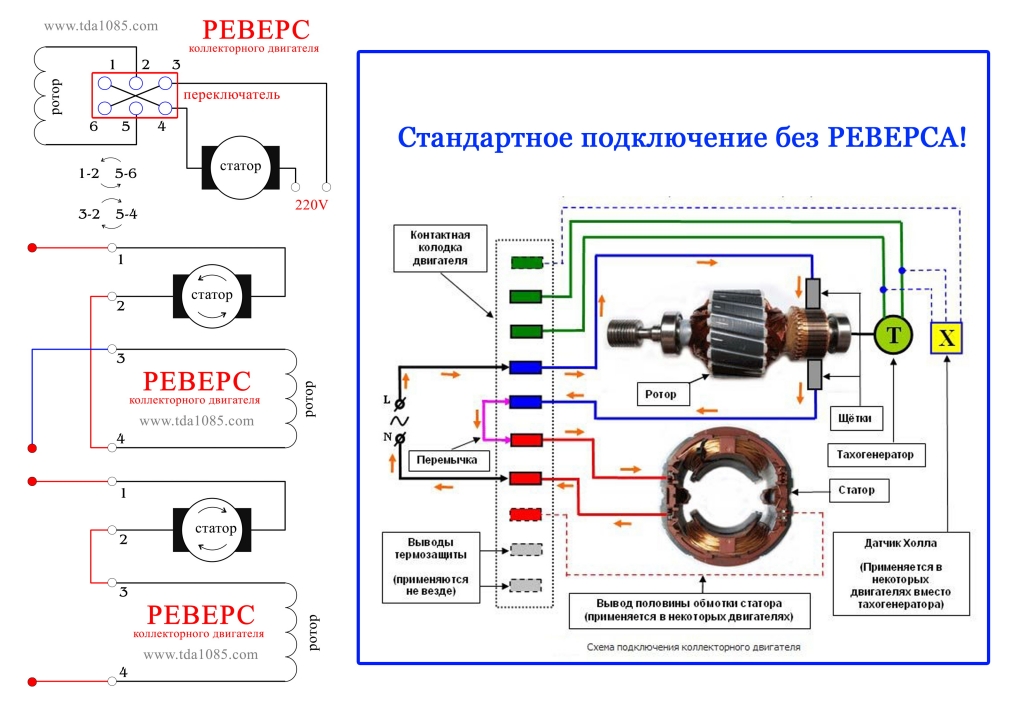
Одна из обмоток статора (обмотка возбуждения) постоянно подключена к источнику переменного тока. Вторая обмотка (генераторная) является выходной и подключается к измерительному прибору.
Принцип работы асинхронного тахогенератора заключается в следующем:
- Переменный ток в обмотке возбуждения создает пульсирующий магнитный поток
- При вращении ротора в нем индуцируются вихревые токи
- Взаимодействие вихревых токов с магнитным потоком создает вращающееся магнитное поле
- Вращающееся поле индуцирует ЭДС в генераторной обмотке
- Величина выходного напряжения пропорциональна скорости вращения ротора
Преимущества асинхронных тахогенераторов
Асинхронные тахогенераторы обладают рядом важных достоинств:
- Простота конструкции и высокая надежность
- Отсутствие скользящих контактов
- Малый момент инерции ротора
- Высокая линейность выходной характеристики
- Независимость частоты выходного напряжения от скорости вращения
- Возможность работы в широком диапазоне скоростей
Недостатки асинхронных тахогенераторов
К основным недостаткам асинхронных тахогенераторов можно отнести:

- Зависимость выходного сигнала от частоты питающего напряжения
- Наличие порога чувствительности на малых скоростях
- Влияние температуры на точность измерений
- Необходимость питания от источника переменного тока
Выходные характеристики асинхронного тахогенератора
Uвых = k * n
где Uвых — выходное напряжение, k — коэффициент пропорциональности, n — частота вращения.
На практике характеристика имеет небольшую нелинейность, особенно на малых скоростях. Это связано с наличием порога чувствительности из-за потерь в стали и механических потерь.
Применение асинхронных тахогенераторов в системах автоматического управления
Асинхронные тахогенераторы широко используются в системах автоматического регулирования и управления электроприводами. Основные схемы применения:
- Формирование отрицательной обратной связи по скорости
- Измерение скорости в системах позиционирования
- Стабилизация скорости вращения электродвигателей
- Ограничение максимальной скорости механизмов
Сигнал с тахогенератора обычно подается на вход регулятора скорости или устройства сравнения. Это позволяет точно поддерживать заданную скорость вращения или отслеживать ее изменение.

Особенности выбора асинхронного тахогенератора
При выборе асинхронного тахогенератора для конкретного применения необходимо учитывать следующие факторы:
- Диапазон измеряемых скоростей
- Требуемая точность измерений
- Условия эксплуатации (температура, вибрации и т.д.)
- Напряжение и частота питания
- Максимально допустимая скорость вращения
- Выходные электрические параметры (напряжение, мощность)
Правильный выбор тахогенератора позволяет обеспечить высокую точность измерения скорости и надежность работы системы управления в целом.
Перспективы развития асинхронных тахогенераторов
Несмотря на появление новых типов датчиков скорости, асинхронные тахогенераторы продолжают активно применяться и совершенствоваться. Основные направления развития:
- Повышение линейности характеристик
- Расширение диапазона рабочих скоростей
- Улучшение температурной стабильности
- Миниатюризация конструкции
- Интеграция с цифровыми системами обработки сигналов
Это позволяет создавать более совершенные системы измерения и регулирования скорости на базе асинхронных тахогенераторов.

§84. Асинхронный тахогенератор | Электротехника
Тахогенераторы применяют для преобразования механического вращения в электрический сигнал. На выходе тахогенератора возникает напряжение, пропорциональное частоте вращения вала какой-либо машины. Шкала прибора, включенного на выходе тахогенератора, градуируется непосредственно в оборотах в минуту (об/мин) или километрах в час (км/ч).
Асинхронный тахогенератор (рис. 277) устроен так же, как двухфазный асинхронный двигатель с полым немагнитным ротором (см. рис. 275,б). На статоре в пазах уложены две обмотки, сдвинутые в пространстве на 90°. Одна из обмоток В (возбуждения) постоянно включена в сеть переменного тока, другая обмотка Г
Рис. 277. Схема асинхронного тахогенератора
(Генераторная) присоединена к нагрузке (электроизмерительному прибору V), т. е. является выходной.
По обмотке возбуждения В проходит переменный ток, благодаря чему создается магнитный поток Фd, пульсирующий с частотой сети. Этот поток распределен в пространстве практически синусоидально, и ось его совпадает с осью обмотки возбуждения рис. 278, а), называемой продольной осью. Полый ротор можно представить в
Этот поток распределен в пространстве практически синусоидально, и ось его совпадает с осью обмотки возбуждения рис. 278, а), называемой продольной осью. Полый ротор можно представить в
виде совокупности ряда элементарных проводников. В каждом таком проводнике поток Фd индуцирует э. д. с. eт, называемую трансформаторной. Так как активное сопротивление полого ротора во много раз больше индуктивного, то э. д. с. ет
При вращении ротора каким-либо посторонним механизмом в его элементарных проводниках, помимо трансформаторной э. д. с, индуцируется еще и э. д. с. вращения евр, пропорциональная частоте вращения ротора n и изменяющаяся во времени с частотой сети. На рис. 278,б показаны мгновенные направления э. д. с. вращения евр и создаваемого ею тока iвр в элементарных проводниках полого ротора. При любой частоте вращения направ-
д. с, индуцируется еще и э. д. с. вращения евр, пропорциональная частоте вращения ротора n и изменяющаяся во времени с частотой сети. На рис. 278,б показаны мгновенные направления э. д. с. вращения евр и создаваемого ею тока iвр в элементарных проводниках полого ротора. При любой частоте вращения направ-
Рис. 278. Распределение э.д.с. и токов в полом роторе, индуцируемых в результате пульсации потока Фd (а) и вращения ротора (б)
Рис. 279. Выходные характеристики асинхронного тахогенератора
ление этой э. д.с. в элементах ротора, расположенных по обе стороны от поперечной оси, будет противоположным. Если пренебречь индуктивным сопротивлением полого ротора, то направление тока iвр в каждом элементе будет совпадать с направлением э. д. с. евр. При этом условии токи ротора iвр будут создавать пульсирующий поперечный магнитный поток Фq. Этот поток не сцеплен непосредственно с обмоткой возбуждения, но в выходной обмотке Г он индуцирует э. д. с. Ег.
д. с. Ег.
Э. д. с. Ег пропорциональна потоку Фq который, в свою очередь, пропорционален току iвр и э. д. с. евр
Иными словами, выходная характеристика 2 (рис. 279) тахогенератора является линейной. В реальных условиях работы тахогенератора указанная характеристика несколько отклоняется от линейной зависимости 1, т. е. появляется амплитудная погрешность ?U. Очевидно, что частота изменения э. д. с. Ег в выходной обмотке не зависит от частоты вращения ротора и при любых условиях равна частоте изменения э. д. с. евр в роторе, т. е. частоте сети, питающей обмотку возбуждения. Неизменность частоты выходного напряжения является ценным свойством асинхронного тахогенератора.
Устройства и элементы систем автоматического регулирования и управления.
 Книга 2. Усилительные устройства, корректирующие элементы и устройства Устройства и элементы систем автоматического регулирования и управления. Книга 2. Усилительные устройства, корректирующие элементы и устройства
Книга 2. Усилительные устройства, корректирующие элементы и устройства Устройства и элементы систем автоматического регулирования и управления. Книга 2. Усилительные устройства, корректирующие элементы и устройства
Устройства и элементы систем автоматического регулирования и управления. Книга 2. Усилительные устройства, корректирующие элементы и устройства
ОглавлениеПРЕДИСЛОВИЕВВЕДЕНИЕ РАЗДЕЛ I. УСИЛИТЕЛЬНЫЕ УСТРОЙСТВА САР ГЛАВА I. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ ТЕОРИИ ЛИНЕЙНЫХ УСИЛИТЕЛЬНЫХ УСТРОЙСТВ 2. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ УСИЛИТЕЛЬНОГО УСТРОЙСТВА БЕЗ ОБРАТНОЙ СВЯЗИ 3. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ, СТАТИЧЕСКИЕ И ДИНАМИЧЕСКИЕ ОСОБЕННОСТИ УСИЛИТЕЛЬНОГО УСТРОЙСТВА С ОБРАТНОЙ СВЯЗЬЮ 4. КЛАССИФИКАЦИЯ И СВОЙСТВА УСИЛИТЕЛЬНЫХ УСТРОЙСТВ С ОТРИЦАТЕЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ 5.  ВЫБОР И РАСЧЕТ УСИЛИТЕЛЬНОГО УСТРОЙСТВА ВЫБОР И РАСЧЕТ УСИЛИТЕЛЬНОГО УСТРОЙСТВАГЛАВА II. ЭЛЕКТРОННЫЕ ЛАМПОВЫЕ И ИОННЫЕ УСИЛИТЕЛИ 1. ОСНОВЫ ТОПОЛОГИЧЕСКОГО АНАЛИЗА СХЕМ ЛИНЕЙНЫХ ЭЛЕКТРОННЫХ ЛАМПОВЫХ УСИЛИТЕЛЕЙ 2. ЭЛЕКТРОННЫЕ УСИЛИТЕЛИ ПОСТОЯННОГО ТОКА 3. БАЛАНСНЫЕ МОСТОВЫЕ УСИЛИТЕЛЬНЫЕ КАСКАДЫ 4. СТАБИЛИЗАЦИЯ КОЭФФИЦИЕНТА УСИЛЕНИЯ 5. ДИФФЕРЕНЦИАЛЬНЫЕ УСИЛИТЕЛЬНЫЕ КАСКАДЫ 6. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ 7. ЭЛЕКТРОННЫЕ УСИЛИТЕЛИ ПЕРЕМЕННОГО ТОКА 8. ОБЩИЕ СВОЙСТВА ИОННОГО (ТИРАТРОННОГО) УСИЛИТЕЛЯ МЕТОДЫ УПРАВЛЕНИЯ ТИРАТРОНОМ 9. ФОРМИРОВАНИЕ УПРАВЛЯЮЩЕГО НАПРЯЖЕНИЯ 10. РАСЧЕТ ЭЛЕМЕНТОВ СХЕМ ТИРАТРОННОГО УСИЛИТЕЛЯ ГЛАВА III. ПОЛУПРОВОДНИКОВЫЕ И ДИЭЛЕКТРИЧЕСКИЕ УСИЛИТЕЛИ 1. ТРАНЗИСТОРНЫЕ УСИЛИТЕЛИ ПЕРЕМЕННОГО ТОКА Цепи смещения. Цепи связи. 2. ТРАНЗИСТОРНЫЕ УСИЛИТЕЛИ СРЕДНЕГО ЗНАЧЕНИЯ ТОКА Полупроводниковые демодуляторы. 3. ТРАНЗИСТОРНЫЕ УСИЛИТЕЛИ В РЕЖИМЕ ПЕРЕКЛЮЧЕНИЯ Режимы импульсного регулирования мощности. Управление силовыми транзисторами. 4. ТРАНЗИСТОРНЫЕ УСТРОЙСТВА УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯМИ И ЭЛЕКТРОМАГНИТНЫМИ МЕХАНИЗМАМИ 5.  ТИРИСТОРЫ. ХАРАКТЕРИСТИКИ, ПАРАМЕТРЫ И СВОЙСТВА ТИРИСТОРЫ. ХАРАКТЕРИСТИКИ, ПАРАМЕТРЫ И СВОЙСТВА6. СПОСОБЫ И УСТРОЙСТВА УПРАВЛЕНИЯ ТИРИСТОРАМИ 7. ТИРИСТОРНЫЕ РЕГУЛЯТОРЫ МОЩНОСТИ С ВЫХОДОМ НА ПОСТОЯННОМ ТОКЕ (РЕГУЛИРУЕМЫЕ ВЫПРЯМИТЕЛИ) 8. ТИРИСТОРНЫЕ РЕГУЛЯТОРЫ МОЩНОСТИ С ВЫХОДОМ НА ПЕРЕМЕННОМ ТОКЕ 9. ТИРИСТОРНЫЕ УСИЛИТЕЛИ С ПИТАНИЕМ ОТ СЕТИ ПОСТОЯННОГО ТОКА 10. ДИЭЛЕКТРИЧЕСКИЕ УСИЛИТЕЛИ 11. ОСНОВЫ РАСЧЕТА ДИЭЛЕКТРИЧЕСКИХ УСИЛИТЕЛЕЙ ГЛАВА IV. КВАНТОВЫЕ УСИЛИТЕЛИ И ГЕНЕРАТОРЫ 2. КВАНТОВЫЕ ГЕНЕРАТОРЫ И УСИЛИТЕЛИ РАДИОДИАПАЗОНА Квантовые усилители радиодиапазона. 3. КВАНТОВЫЕ ГЕНЕРАТОРЫ И УСИЛИТЕЛИ ОПТИЧЕСКОГО И ИНФРАКРАСНОГО ДИАПАЗОНОВ Оптический квантовый усилитель 4. ПРИМЕНЕНИЕ В САР КВАНТОВЫХ УСИЛИТЕЛЕЙ И ГЕНЕРАТОРОВ РАДИОДИАПАЗОНА, ОПТИЧЕСКОГО И ИНФРАКРАСНОГО ДИАПАЗОНОВ ГЛАВА V. МАГНИТНЫЕ И МАГНИТНО-ПОЛУПРОВОДНИКОВЫЕ УСИЛИТЕЛИ 2. КОНСТРУКТИВНЫЕ ОСОБЕННОСТИ МАГНИТНЫХ УСИЛИТЕЛЕЙ 3. ОДНОТАКТНЫЕ МАГНИТНЫЕ УСИЛИТЕЛИ БЕЗ ОБРАТНОЙ СВЯЗИ (УПРАВЛЯЕМЫЕ ДРОССЕЛИ И ТРАНСФОРМАТОРЫ) 4.  МАГНИТНЫЕ УСИЛИТЕЛИ С САМОНАСЫЩЕНИЕМ МАГНИТНЫЕ УСИЛИТЕЛИ С САМОНАСЫЩЕНИЕМРелейный режим работы усилителей с самонасыщением. 5. ДВУХТАКТНЫЕ МАГНИТНЫЕ УСИЛИТЕЛИ С ВЫХОДОМ НА ПЕРЕМЕННОМ ТОКЕ 6. ДВУХТАКТНЫЕ МАГНИТНЫЕ УСИЛИТЕЛИ С ВЫХОДОМ НА ПОСТОЯННОМ ТОКЕ 7. МАГНИТНО-ПОЛУПРОВОДНИКОВЫЕ УСИЛИТЕЛИ ГЛАВА VI. ЭЛЕКТРОМАШИННЫЕ УСИЛИТЕЛИ 2. ЭЛЕКТРОМАШИННЫЕ УСИЛИТЕЛИ С НЕЗАВИСИМЫМ ВОЗБУЖДЕНИЕМ И С САМОВОЗБУЖДЕНИЕМ 3. ЭЛЕКТРОМАШИННЫЕ УСИЛИТЕЛИ С ПОПЕРЕЧНЫМ ПОЛЕМ 4. ЭЛЕКТРОМАШИННЫЙ УСИЛИТЕЛЬ ПРОДОЛЬНОГО И ПРОДОЛЬНО-ПОПЕРЕЧНОГО ПОЛЯ 5. ВЛИЯНИЕ НА ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЭМУ ВИХРЕВЫХ И КОММУТАЦИОННЫХ ТОКОВ, ГИСТЕРЕЗИСА И СДВИГА ЩЕТОК С НЕЙТРАЛИ 6. МЕТОДЫ УЛУЧШЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ЭЛЕКТРОМАШИННЫХ УСИЛИТЕЛЕЙ 7. НАГРУЗОЧНАЯ ХАРАКТЕРИСТИКА ЭЛЕКТРОМАШИННОГО УСИЛИТЕЛЯ ГЛАВА VII. ЭЛЕКТРОМЕХАНИЧЕСКИЕ УСИЛИТЕЛИ 1. ХАРАКТЕРИСТИКИ УСИЛИТЕЛЕЙ И СПОСОБЫ ИХ ФОРМИРОВАНИЯ 2. ЭЛЕКТРОМАГНИТНЫЕ РЕЛЕ 3. ЭЛЕКТРОМЕХАНИЧЕСКИЕ ЛИНЕАРИЗОВАННЫЕ УСИЛИТЕЛИ С ЭЛЕКТРОМАГНИТНЫМИ РЕЛЕ 4. БЕСКОНТАКТНЫЕ ЛИНЕАРИЗОВАННЫЕ РЕЛЕЙНЫЕ УСИЛИТЕЛИ ГЛАВА VIII.  ГИДРАВЛИЧЕСКИЕ УСИЛИТЕЛИ ГИДРАВЛИЧЕСКИЕ УСИЛИТЕЛИ2. ОСНОВНЫЕ ЭЛЕМЕНТЫ ГИДРАВЛИЧЕСКИХ УСИЛИТЕЛЕЙ И ИХ ХАРАКТЕРИСТИКИ 3. ОДНОКАСКАДНЫЕ ГИДРАВЛИЧЕСКИЕ УСИЛИТЕЛИ С ЗОЛОТНИКОМ 4. ОДНОКАСКАДНЫЕ ГИДРАВЛИЧЕСКИЕ УСИЛИТЕЛИ СО СТРУЙНОЙ ТРУБКОЙ 5. СХЕМЫ И ПРИНЦИПЫ ДЕЙСТВИЯ ДВУХКАСКАДНЫХ ГИДРАВЛИЧЕСКИХ УСИЛИТЕЛЕЙ 6. СТАТИКА ДВУХКАСКАДНЫХ ГИДРАВЛИЧЕСКИХ УСИЛИТЕЛЕЙ 7. ДИНАМИКА ДВУХКАСКАДНЫХ ГИДРАВЛИЧЕСКИХ УСИЛИТЕЛЕЙ 8. УНИФИКАЦИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИХ УСИЛИТЕЛЕЙ ДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И УПРАВЛЕНИЯ ГЛАВА IX. ПНЕВМАТИЧЕСКИЕ УСИЛИТЕЛИ 1. ПНЕВМАТИЧЕСКИЕ УСИЛИТЕЛИ И ИХ КЛАССИФИКАЦИЯ 2. ПНЕВМАТИЧЕСКИЙ УСИЛИТЕЛЬ СО СТРУЙНОЙ ТРУБКОЙ 3. ПНЕВМАТИЧЕСКИЙ УСИЛИТЕЛЬ С ЗОЛОТНИКОМ 4. ПНЕВМАТИЧЕСКИЙ УСИЛИТЕЛЬ С СОПЛОМ – ЗАСЛОНКОЙ 5. ПНЕВМАТИЧЕСКИЙ УСИЛИТЕЛЬ С ЗАСЛОНКОЙ 6. МНОГОКАСКАДНЫЕ ПНЕВМАТИЧЕСКИЕ УСИЛИТЕЛИ РАЗДЕЛ II. КОРРЕКТИРУЮЩИЕ ЭЛЕМЕНТЫ И УСТРОЙСТВА ГЛАВА X. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ ТЕОРИИ КОРРЕКТИРУЮЩИХ ЭЛЕМЕНТОВ И УСТРОЙСТВ 2. МАТЕМАТИЧЕСКИЕ МЕТОДЫ СИНТЕЗА ЛИНЕЙНЫХ ПАССИВНЫХ КОРРЕКТИРУЮЩИХ УСТРОЙСТВ Основные соотношения для синтеза пассивного RC-четырехполюсника.  3. КОРРЕКТИРУЮЩИЕ УСТРОЙСТВА С АКТИВНЫМИ ЭЛЕМЕНТАМИ Активные четырехполюсники, получаемые с помощью конверторов отрицательного сопротивления. Активные четырехполюсники, получаемые с помощью гираторов. 4. НЕКОТОРЫЕ МАТЕМАТИЧЕСКИЕ МЕТОДЫ СИНТЕЗА НЕЛИНЕЙНЫХ КОРРЕКТИРУЮЩИХ УСТРОЙСТВ 5. ОСОБЕННОСТИ КОРРЕКТИРУЮЩИХ ЭЛЕМЕНТОВ ПЕРЕМЕННОГО ТОКА ГЛАВА XI. ЭЛЕКТРИЧЕСКИЕ КОРРЕКТИРУЮЩИЕ ЭЛЕМЕНТЫ И УСТРОЙСТВА ПОСТОЯННОГО ТОКА Дифференцирующий трансформатор. Электрические интегрирующие элементы. 2. ТИПОВЫЕ ЛИНЕЙНЫЕ КОРРЕКТИРУЮЩИЕ ЭЛЕМЕНТЫ И УСТРОЙСТВА 3. КОРРЕКТИРУЮЩИЕ ЧЕТЫРЕХПОЛЮСНИКИ С АКТИВНЫМИ ЭЛЕМЕНТАМИ Четырехполюсники с активными элементами на основе операционных усилителей (ОУ) и конверторов отрицательного сопротивления (КОС). 4. РЕАЛИЗАЦИЯ ЗАДАННОЙ ПЕРЕДАТОЧНОЙ ФУНКЦИИ В ВИДЕ СХЕМЫ ПАССИВНОГО ЛИНЕЙНОГО КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА 5. НЕЛИНЕЙНЫЕ КОРРЕКТИРУЮЩИЕ УСТРОЙСТВА ОПТИМАЛЬНЫХ СИСТЕМ УПРАВЛЕНИЯ 8. НЕЛИНЕЙНЫЕ ЛОГИЧЕСКИЕ КОРРЕКТИРУЮЩИЕ УСТРОЙСТВА Многоканальные нелинейные логические устройства.  ГЛАВА XII. ЭЛЕКТРИЧЕСКИЕ КОРРЕКТИРУЮЩИЕ ЭЛЕМЕНТЫ ПЕРЕМЕННОГО ТОКА 1. КОРРЕКТИРУЮЩИЕ RLC-ЧЕТЫРЕХПОЛЮСНИКИ ПЕРЕМЕННОГО ТОКА 2. КОРРЕКТИРУЮЩИЕ RC-ЧЕТЫРЕХПОЛЮСНИКИ ПЕРЕМЕННОГО ТОКА 3. АКТИВНЫЕ КОРРЕКТИРУЮЩИЕ RC-ЧЕТЫРЕХПОЛЮСНИКИ ПЕРЕМЕННОГО ТОКА 4. САМОНАСТРАИВАЮЩИЕСЯ КОРРЕКТИРУЮЩИЕ УСТРОЙСТВА ПЕРЕМЕННОГО ТОКА 5. КОРРЕКТИРУЮЩИЕ УСТРОЙСТВА ПЕРЕМЕННОГО ТОКА С ПРОМЕЖУТОЧНОЙ ДЕМОДУЛЯЦИЕЙ 6. КОРРЕКТИРУЮЩИЕ ЭЛЕМЕНТЫ ПЕРЕМЕННОГО ТОКА С ПЕРЕКЛЮЧАТЕЛЯМИ 7. НЕЛИНЕЙНЫЕ КОРРЕКТИРУЮЩИЕ ЭЛЕМЕНТЫ ПЕРЕМЕННОГО ТОКА ГЛАВА XIII. ЭЛЕКТРОМЕХАНИЧЕСКИЕ КОРРЕКТИРУЮЩИЕ УСТРОЙСТВА 1. ТАХОГЕНЕРАТОРЫ ПОСТОЯННОГО ТОКА Погрешности тахогенератора постоянного тока. 2. НЕКОТОРЫЕ СХЕМЫ ПРИМЕНЕНИЯ ТАХОГЕНЕРАТОРОВ 3. АСИНХРОННЫЕ ТАХОГЕНЕРАТОРЫ 4. ЭЛЕКТРИЧЕСКИЕ СХЕМЫ ИЗМЕРЕНИЯ СКОРОСТИ ЭЛЕКТРОДВИГАТЕЛЕЙ Пассивный тахометрический мост переменного тока. Активные тахометрические мосты. ГЛАВА XIV. ГИДРАВЛИЧЕСКИЕ И ПНЕВМАТИЧЕСКИЕ КОРРЕКТИРУЮЩИЕ УСТРОЙСТВА 2. ГИБКИЕ ОБРАТНЫЕ СВЯЗИ В ГИДРАВЛИЧЕСКИХ СИСТЕМАХ 3. 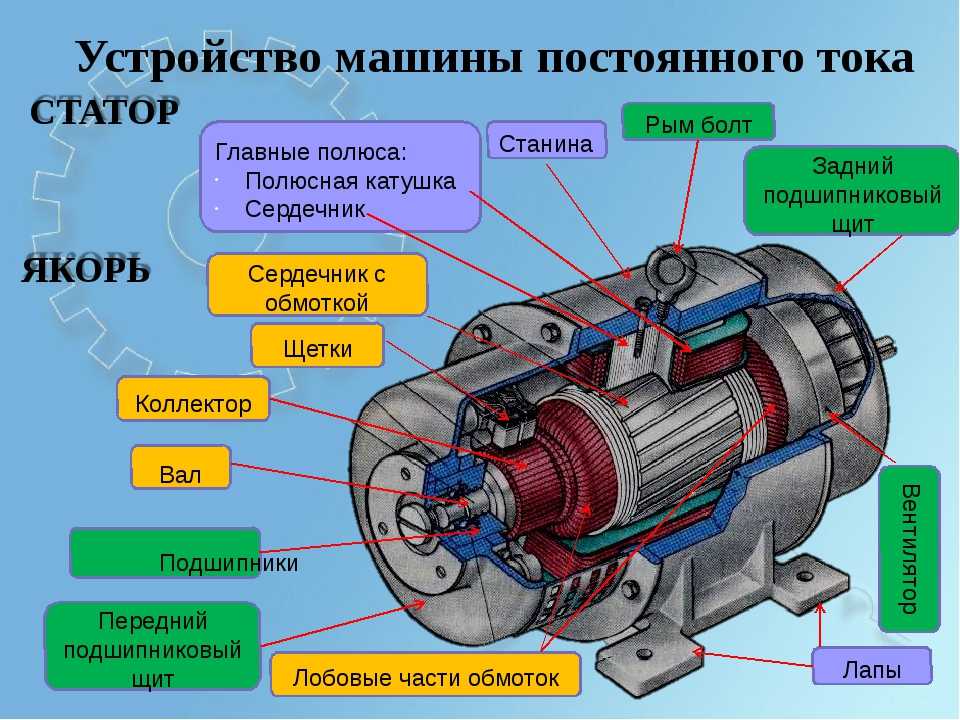 ЭЛЕКТРИЧЕСКИЕ ОБРАТНЫЕ СВЯЗИ ЭЛЕКТРИЧЕСКИЕ ОБРАТНЫЕ СВЯЗИ4. ЖЕСТКИЕ ОБРАТНЫЕ СВЯЗИ В ПНЕВМАТИЧЕСКИХ УСТРОЙСТВАХ 5. ГИБКИЕ ОБРАТНЫЕ СВЯЗИ В ПНЕВМАТИЧЕСКИХ СИСТЕМАХ 6. СЛОЖНЫЕ ОБРАТНЫЕ СВЯЗИ В ПНЕВМАТИЧЕСКИХ УСТРОЙСТВАХ ПРИЛОЖЕНИЕ 1. КОРРЕКТИРУЮЩИЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА ПРИЛОЖЕНИЕ II. КОРРЕКТИРУЮЩИЕ УСТРОЙСТВА НА ОСНОВЕ ОПЕРАЦИОННЫХ УСИЛИТЕЛЕЙ ПРИЛОЖЕНИЕ III. НЕЛИНЕЙНЫЕ ЛОГИЧЕСКИЕ КОРРЕКТИРУЮЩИЕ УСТРОЙСТВА БИБЛИОГРАФИЯ ПО РАЗДЕЛАМ КНИГИ |
Что такое электрический тахометр? — Генератор тахометра постоянного и переменного тока
Определение: Тахометр используется для измерения скорости вращения или угловой скорости машины, которая сцеплена с ним. Он работает по принципу относительного движения между магнитным полем и валом сопряженного устройства. Относительное движение индуцирует ЭДС в катушке, помещенной между постоянным магнитным полем постоянного магнита. Развиваемая ЭДС прямо пропорциональна скорости вращения вала.
Механический и электрический тахометр бывают двух типов. Механический тахометр измеряет скорость вращения вала относительно оборотов в минуту.
Электрический тахометр преобразует угловую скорость в электрическое напряжение. Электрический тахометр имеет больше преимуществ перед механическим тахометром. Таким образом, он в основном используется для измерения скорости вращения вала. В зависимости от природы наведенного напряжения электрические тахометры делятся на два типа.
- Генератор тахометра переменного тока
- Генератор тахометра постоянного тока
Генератор тахометра постоянного тока
Постоянный магнит, якорь, коммутатор, щетки, переменный резистор и вольтметр с подвижной катушкой являются основными частями генератора тахометра постоянного тока. Машина, скорость которой должна быть измерена, соединена с валом тахометрического генератора постоянного тока.
Тахометр постоянного тока работает по тому принципу, что когда замкнутый проводник движется в магнитном поле, в проводнике индуцируется ЭДС. Величина ЭДС индукции зависит от связи потока с проводником и скорости вала.
Величина ЭДС индукции зависит от связи потока с проводником и скорости вала.
Якорь генератора постоянного тока вращается между постоянным полем постоянного магнита. Вращение индуцирует ЭДС в катушке. Величина ЭДС индукции пропорциональна скорости вращения вала.
Коммутатор преобразует переменный ток катушки якоря в постоянный с помощью щеток. Вольтметр с подвижной катушкой измеряет ЭДС индукции. Полярность индуцирующего напряжения определяет направление движения вала. Сопротивление включено последовательно с вольтметром для контроля сильного тока якоря.
ЭДС индукции в тахометрическом генераторе постоянного тока задается как
Где, E – генерируемое напряжение
Φ – поток на полюс в Weber
P- число полюсов
N – скорость в оборотах в минуту
Z – количество проводник в обмотках якоря.
а – номер параллельного пути в обмотках якоря.
Преимущества генератора постоянного тока
Ниже приведены преимущества тахометра постоянного тока.
- Полярность индуктивного напряжения указывает направление вращения вала.
- Обычный вольтметр постоянного тока используется для измерения индуктивного напряжения.
Недостатки генератора постоянного тока
- Коллектор и щетки требуют периодического обслуживания.
- Выходное сопротивление тахометра постоянного тока остается высоким по сравнению с входным сопротивлением. Если в проводнике якоря индуцируется большой ток, постоянное поле постоянного магнита будет искажаться.
Генератор тахометра переменного тока
Генератор тахометра постоянного тока использует коллектор и щетки, которые имеют много недостатков. Генератор тахометра переменного тока предназначен для уменьшения проблем. Тахометр переменного тока имеет неподвижный якорь и вращающееся магнитное поле. Таким образом, в тахометрическом генераторе переменного тока отсутствуют коммутатор и щетки.
Вращающееся магнитное поле индуцирует ЭДС в неподвижной катушке статора. Амплитуда и частота ЭДС индукции эквивалентны скорости вращения вала. Таким образом, для измерения угловой скорости используется либо амплитуда, либо частота.
Амплитуда и частота ЭДС индукции эквивалентны скорости вращения вала. Таким образом, для измерения угловой скорости используется либо амплитуда, либо частота.
Упомянутая ниже схема используется для измерения скорости вращения ротора с учетом амплитуды индуцированного напряжения. Наведенные напряжения выпрямляются и затем поступают на емкостной фильтр для сглаживания пульсаций выпрямленных напряжений.
Генератор переменного тока с вращающейся чашкой ротора
Тахометр переменного тока с вращающейся чашкой показан на рисунке ниже.
Статор генератора состоит из двух обмоток, т. е. опорной и квадратурной. Обе обмотки смонтированы 90° друг от друга. Ротор тахометра выполнен с тонкой алюминиевой чашкой и помещен между полевой конструкцией.
Ротор изготовлен из высокоиндуктивного материала с низкой инерцией. Вход подается на опорную обмотку, а выход получается на квадратурную обмотку. Вращение ротора между магнитным полем индуцирует напряжение в измерительной обмотке. Индуктивное напряжение пропорционально скорости вращения.
Индуктивное напряжение пропорционально скорости вращения.
Преимущества
- Чашечный тахогенератор генерирует выходное напряжение без пульсаций.
- Стоимость генератора также намного меньше.
Недостаток
Нелинейная зависимость возникает между выходным напряжением и входной скоростью, когда ротор вращается с высокой скоростью.
Мотор-генератор IE-1 с асинхронным управлением
Etsy больше не поддерживает старые версии вашего веб-браузера, чтобы обеспечить безопасность пользовательских данных. Пожалуйста, обновите до последней версии.
Воспользуйтесь всеми преимуществами нашего сайта, включив JavaScript.
-
Загрузка
Нажмите, чтобы увеличить
Цена: €29,00
Загрузка
Доступен только 1
Включены местные налоги (где применимо) плюс стоимость доставки
988 продаж |
5 из 5 звездВы можете сделать предложение только при покупке одного товара
Рекомендации по загрузке
Загрузка
Загрузка
Загрузка
Загрузка
Загрузка
Загрузка
Загрузка
Внесен в список 9 марта 2023 г.
Сообщить об этом элементе в Etsy
Выберите причину… С моим заказом возникла проблемаОн использует мою интеллектуальную собственность без разрешенияЯ не думаю, что это соответствует политике EtsyВыберите причину…
Первое, что вы должны сделать, это связаться с продавцом напрямую.
Если вы уже сделали это, ваш товар не прибыл или не соответствует описанию, вы можете сообщить об этом Etsy, открыв кейс.
Сообщить о проблеме с заказом
Мы очень серьезно относимся к вопросам интеллектуальной собственности, но многие из этих проблем могут быть решены непосредственно заинтересованными сторонами. Мы рекомендуем связаться с продавцом напрямую, чтобы уважительно поделиться своими проблемами.
Если вы хотите подать заявление о нарушении прав, вам необходимо выполнить процедуру, описанную в нашей Политике в отношении авторских прав и интеллектуальной собственности.