Что такое бистабильное реле. Как работает бистабильное реле. Какие бывают виды бистабильных реле. Где применяются бистабильные реле. В чем преимущества и недостатки бистабильных реле.
Что такое бистабильное реле и как оно работает
Бистабильное реле — это особый вид электромагнитного реле, которое имеет два устойчивых состояния и управляется короткими импульсами тока. Основные особенности бистабильных реле:
- Имеет два устойчивых положения контактов — включено и выключено
- Для переключения требуется только короткий управляющий импульс
- После переключения сохраняет свое состояние без подачи питания
- Для обратного переключения нужен импульс противоположной полярности
Как работает бистабильное реле? Принцип его действия основан на использовании постоянного магнита и электромагнита с двумя обмотками. При подаче импульса на одну из обмоток якорь притягивается к сердечнику и замыкает или размыкает контакты. После окончания импульса якорь удерживается в этом положении магнитным полем постоянного магнита.

Основные виды бистабильных реле
Существует несколько основных разновидностей бистабильных реле:
1. Электромеханические бистабильные реле
Это классический вариант с подвижным якорем и контактной группой. Основные элементы:
- Постоянный магнит
- Электромагнит с двумя обмотками
- Подвижный якорь
- Контактная группа
- Пружинный механизм
2. Герконовые бистабильные реле
Используют герметичный контакт (геркон) с магнитоуправляемыми контактами. Преимущества:
- Высокая надежность
- Отсутствие дребезга контактов
- Работа в агрессивных средах
- Высокое быстродействие
3. Твердотельные бистабильные реле
Построены на основе полупроводниковых элементов без подвижных частей. Особенности:
- Отсутствие механического износа
- Высокая скорость переключения
- Возможность работы в широком диапазоне частот
- Малые габариты
Области применения бистабильных реле
Благодаря своим уникальным свойствам бистабильные реле нашли широкое применение в различных областях:
Системы автоматизации
В промышленной автоматике бистабильные реле используются для:
- Управления электродвигателями
- Коммутации силовых цепей
- Фиксации аварийных состояний
- Построения логических схем управления
Энергетика
В энергетических системах бистабильные реле применяются для:
- Управления высоковольтными выключателями
- Защиты от перегрузок и коротких замыканий
- Автоматического включения резерва (АВР)
- Сигнализации аварийных режимов
Бытовая техника
В бытовых электроприборах бистабильные реле используются в:
- Стиральных машинах
- Холодильниках
- Микроволновых печах
- Кондиционерах
Преимущества и недостатки бистабильных реле
Бистабильные реле обладают рядом преимуществ по сравнению с обычными электромагнитными реле:
Преимущества:
- Низкое энергопотребление (только в момент переключения)
- Сохранение состояния при отключении питания
- Высокая помехоустойчивость
- Возможность удаленного управления
- Большой срок службы
Недостатки:
- Более высокая стоимость
- Сложность конструкции
- Необходимость в специальных схемах управления
- Возможность самопроизвольного переключения при сильных вибрациях
Как выбрать бистабильное реле
При выборе бистабильного реле следует учитывать следующие параметры:
- Номинальное напряжение и ток коммутации
- Напряжение управления
- Время срабатывания
- Количество и тип контактов
- Механическая и электрическая износостойкость
- Габаритные размеры
- Диапазон рабочих температур
Для правильного выбора рекомендуется ознакомиться с техническими характеристиками конкретных моделей и проконсультироваться со специалистами.
Схемы подключения бистабильных реле
Существует несколько основных схем подключения бистабильных реле:
1. Схема с одной кнопкой управления
В этой схеме используется одна кнопка без фиксации для переключения реле. При каждом нажатии реле меняет свое состояние на противоположное. Преимущество — простота управления.
2. Схема с двумя кнопками управления
Здесь применяются две отдельные кнопки для включения и выключения реле. Это позволяет более точно контролировать состояние реле, но требует дополнительной проводки.
3. Схема с управлением от микроконтроллера
В данном случае для управления реле используется микроконтроллер, который формирует управляющие импульсы нужной полярности. Это дает возможность реализовать сложные алгоритмы управления.

Перспективы развития бистабильных реле
Несмотря на то, что бистабильные реле известны уже давно, они продолжают развиваться. Основные направления совершенствования:
- Уменьшение габаритов и энергопотребления
- Повышение надежности и срока службы
- Расширение функциональных возможностей
- Интеграция с цифровыми системами управления
- Применение новых материалов
Ожидается, что в будущем бистабильные реле найдут еще более широкое применение в различных отраслях техники, особенно в системах с автономным питанием и в «умных» устройствах.
Импульсные реле (Бистабильные). Виды и работа. Применение
Бистабильные реле это реле, управляющиеся импульсами, из-за чего приборы также принято называть импульсные реле. Эти устройства связывают своими контактами цепи и сети различной мощности при индуктивных, активных и прочих нагрузках.
Устройство и назначение
Назначение бистабильных реле заключается в регулировании цепями освещения либо другими потребителями. Их устройство базируется на таких элементах:
- Постоянный магнит.
- Катушка.
- Якорь.
- Система контактов.
- Полюсные наконечники магнитопровода.
- Винты для регулировки.
- Корпус.
Якорь прикрепляется к металлическому основанию в середине катушки вместе с контактами. В бистабильных реле подвижные контакты, за исключением штепсельного типа реле, в котором группа контактов содержит подвижные и неподвижные контакты. Корпус выполняется в виде прозрачного колпачка с ручкой.
В некоторых моделях внутри колпачка монтируют переключатели для ручного управления переключением реле и блинкеры для индикации контактов. Блинкеры представляют собой механические элементы.
Блинкеры представляют собой механические элементы.
Бистабильное реле контролируется импульсами, это значит, чтобы включить устройство требуется подать управляющий импульс для замыкания контактов и такой же импульс для размыкания контактов, чтобы выключить прибор.
Размыкание и замыкание контактной группы обеспечивает катушка, установленная в реле. С её помощью реле при подаче напряжения втягивает сердечник. После чего контактная система замыкается либо размыкается, в зависимости от её исходного положения.
Для подачи питания на катушку реле необходимо кратковременно нажать на кнопочный выключатель. Тогда питание на катушку замкнёт свой силовой контакт и при этом подаст питание к нагрузке. После следующего нажатия на кнопку силовые контакты импульсного реле размыкаются, а цепь нагрузки разрывается.
Разновидности бистабильных релеНа рынке можно обнаружить различные модификации импульсных реле. Они могут отличаться своим корпусом, принципом работы или иметь другие различия. Объединяются бистабильные реле в одну группу по своему назначению, но по принципу действия их делят на два вида:
- Электромеханические.
- Электронные.
Конструктивное исполнение электромеханических бистабильных реле имеет сходство с устройством модульных контакторов. Катушка модульного контактора, находящегося в рабочем режиме, всегда под напряжением, а катушка импульсного реле получает только кратковременные импульсы. Реле, основанное на импульсах, потребляет электроэнергию исключительно в момент коммутации.
Главными составляющими являются следующие элементы:
- Катушка.
- Контактная группа.
- Пружинная система.
- Рычажная система.
Работа электромеханических бистабильных реле практически не отличается от простых электромеханических реле. Они способны поочерёдно включать и отключать устройства, когда поступают импульсы на катушку.
Электронные реле отличаются своей конструкцией от электромеханических. Так как у них нет сердечника и собраны эти реле на основе микроконтроллера. Приборы имеют полупроводниковый элемент (ключ) с микропроцессором или релейный вход. Контроллеры предназначены для управления коммутацией нагрузки и слежения за сигнальным входом. В некоторых моделях микроконтроллёры соединены с таймерами, благодаря этому можно собирать своеобразные схемы на базе одного реле.
Импульсные реле выпускаются разных мощностей и могут иметь следующие отличия:
- Количество контактов.
- Тип контактов.
- Число полюсов.
- Тип поляризации.
- Номинальный ток силовых контактов (16 А, 32А).
- Способ установки:- навесной;- на DIN рейку в распределительный щит.
Реле навесного типа часто устанавливают под навесным потолком, а также в распределительной коробке.
Основное применениеИмпульсные реле имеют разное назначение. Некоторыми моделями пользуются на тепловых и атомных станциях, другими в быту для управления разными светильниками из нескольких точек в доме. Широко распространено реле этого типа в железнодорожной сфере, его применяют для улавливания импульсов рельсовых цепей, контролирующих рельсовые линии на станциях. Также приборы эксплуатируются для автоматизации разных процессов в сфере телемеханики и производстве.
С помощью бистабильных реле организовывают регулирование освещением, как и с помощью проходных выключателей. Но в реле, управляющихся импульсами, намного больший функционал, поэтому их можно применять в конструкциях систем автоматического управления. Они позволяют управлять не одной группой освещения из разных мест при помощи кнопочных выключателей соединённых параллельно. Благодаря чему можно создать централизованное управление всеми осветительными приборами в доме, чтобы уходя из дому, гасить полностью освещение в здании, путём нажатия на один выключатель.
Импульсные электронные реле с таймером удобно использовать на лестничных пролётах либо проходных коридорах.
Плюсы и минусыБистабильные реле электромеханического типа имеют такие плюсы:
- Надёжность.
- Устойчивость к перенапряжениям сети.
Недостатки электромеханических реле:
- Низкая функциональность (выполняют одну функцию).
- Отсутствует индикации положения контактов.
Плюсы электронных импульсных реле:
- Эффективное управление осветительными приборами в помещении.
- Безопасность.
- Возможность монтажа вспомогательных приспособлений.
- Широкие возможности регулирования электроцепями.
- Высокая функциональность.
- Наличие индикаторных светодиодов.
Недостатки электронных импульсных реле:
- Высокая чувствительность к уровню напряжения сети.
- Восприимчивость к импульсным перенапряжениям.
- Вероятность ложного срабатывания, обусловленная реакцией на помехи в сети.
Электромеханические импульсные реле зарекомендовали себя как более удобные и надёжные приборы по сравнению с электронными. Так как электронные реле нуждаются в полноценном и стабильном питании, при этом фаза и ноль должны непрерывно подаваться на них. Также у них низкая защита от помех, но высокая безопасность в отличии от электромеханических реле.
Похожие темы:
бистабильный — это… Что такое бистабильный?
бистабильный — бистабильный … Орфографический словарь-справочник
бистабильный — с двумя устойчивыми состояниями — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия Синонимы с двумя устойчивыми… … Справочник технического переводчика
бистабильный коэффициент — переключаемый коэффициент — [Л.Г.Суменко. Англо русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.] Тематики информационные технологии в целом Синонимы переключаемый коэффициент EN triggered coefficient … Справочник технического переводчика
бистабильный мультивибратор — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN bistable multivibratorflip flop multivibratortrigger … Справочник технического переводчика
бистабильный прибор — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN bistable device … Справочник технического переводчика
бистабильный режим — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN bistable operation … Справочник технического переводчика
бистабильный режим запоминающей электронно-лучевой трубки — Режим работы запоминающей электронно лучевой трубки, при котором выходной сигнал может иметь лишь два возможных уровня. [ГОСТ 17791 82] Тематики электровакуумные приборы EN bistable operation of storage tube DE bistabiler Betrieb einer… … Справочник технического переводчика
Бистабильный экран — Эту страницу предлагается объединить с Блинкерное табло … Википедия
бистабильный лазер — dviejų būsenų lazeris statusas T sritis radioelektronika atitikmenys: angl. bistable laser vok. bistabiler Laser, m rus. бистабильный лазер, m pranc. laser à deux positions d équilibre, m; laser bistable, m … Radioelektronikos terminų žodynas
бистабильный оптический элемент — optinis dviejų pastoviųjų būsenų elementas statusas T sritis radioelektronika atitikmenys: angl. bistable optical element vok. bistabiles optisches Element, n rus. бистабильный оптический элемент, m pranc. élément optique bistable, m … Radioelektronikos terminų žodynas
Мультивибратор — Принципиальная схема классического простейшего транзисторного мультивибратора Мультивибратор релаксационный генератор сигналов электрических прямоугольных колебаний с короткими фронтами. Термин предложен голландским физиком … Википедия
Соленоид vavle 4V420 5/2 бистабильный 1/2 дюйма для пневматических цилиндров 230 В или 12 В, 24 В
Электромагнитный клапан 4V420 5/2 G1 / 2 «бистабильные 2 катушки
Весь комплект состоит из: клапана + катушки + стандартного DIN-разъема с диодом, который сигнализирует о текущей работе.
Имеются версии катушек:
AC: 230V 110V 24V
DC: 24V 12V
ПРОДУКТ НОВЫЙ — ИНВЕСТИЦИЯ НДС, ГАРАНТИЯ: 24 месяца
Клапан с возможностью ручного открывания в случае отсутствия напряжения или отказа катушки.
Клапан не требует постоянного напряжения — бистабильный клапан.
Управление импульсным напряжением питания катушек.
Основное применение:
5/2 пневматических цилиндров двойного действия.
Технические данные:
Соленоидный клапан 4V420 5/2 G1 / 2 «
| Тип | 2-х позиционный 5-й путь, бистабильный клапан — две катушки |
| КПД | 50mm2 |
| поток | 2000 л / мин для 3 бар |
| соединение | 5x внутренняя резьба 1/2 » |
| средний | Фильтрованный воздух |
| Мощность | AC: 5,5VA DC: 4,8W x2 |
| Рабочее давление | 1,5-8 бар макс. 12 бар |
| Рабочая температура | 5-50 ° C |
| Время реакции | 0,05 с. |
| Класс изоляции | IP65 |
Для клапанов имеются разъемы, шланги и различные пневматические компоненты.
Мы предлагаем различные электромагнитные клапаны NC и NO с другими диаметрами. Наше предложение также включает шаровые краны с приводами.
Привлекательные скидки для оптовых покупателей.
Бистабильный позвоночник позволил мягкому роботу перейти на галоп
Американские инженеры предложили оснащать мягких роботов бистабильным позвоночником с пружиной — благодаря этому роботы могут передвигаться гораздо быстрее. Для демонстрации эффективности такого подхода авторы создали несколько прототипов, один из которых может галопировать со скоростью 2,5 длины тела в секунду, что в два раза быстрее полностью мягкого аналога. Статья опубликована в Science Advances.
В последние несколько лет разработка мягких роботов существенно продвинулась вперед — так, в 2016 году инженерам впервые удалось создать полностью мягкого робота, в котором вместо жесткой электроники использовалась примитивная микрофлюидная схема. Однако практическое применение самых разных мягких роботов еще далеко от реальности, и одно из важных ограничений — скорость передвижения. Современные мягкие роботы по-прежнему передвигаются крайне медленно относительно собственной длины — к примеру, один из последних мягких роботов за секунду преодолевает 0,75 длины своего тела.
Чтобы это компенсировать инженеры пытаются найти разные подходы (даже мягкое пневматическое колесное шасси), и теперь исследователи из США предложили еще одну концепцию. Цзе Инь (Jie Yin) из Университета штата Северная Каролина и его коллеги из других американских университетов протестировали разные варианты конструкции для мягкого робота и обнаружили, что скорость передвижения полностью мягкого робота можно значительно увеличить, добавив в конструкцию бистабильный позвоночник с пружиной.
Авторы экспериментировали с примитивной конструкцией робота на четырех опорах. Робот состоит из двух параллельных сегментов, в каждом из которых есть верхний и нижний пневматический канал. Управляя давлением в них можно заставить робота сгибаться и разгибаться, в результате чего он будет шагать вперед.
Схема устройства робота с бистабильным позвоночником
Jie Yin et al. / Science Advances, 2020
Инженеры испытали три версии шагающего робота: полностью мягкая, с двухсегментным позвоночником и с бистабильным позвоночником (двухсегментный позвоночник и пружина). В последнем варианте пружина работает как конденсатор энергии — сначала при изменении давления она сжимается, а когда позвоночник пересекает точку максимального сжатия, пружина разжимается, робот резко разгибается и прыгает вперед (авторы назвали эту походку галопом).
Исследователи сравнили роботов в трех разных модификациях и выяснилось, что если использовать простой позвоночник, то мягкий робот без него все же передвигается быстрее, чем с ним (1,2 длины тела в секунду против 0,5), однако если в конструкцию добавить пружину, скорость вырастает до 2,5 длины тела в секунду (174 миллиметра в секунду). Дополнительно инженеры продемонстрировали прототип плавающего робота с бистабильным позвоночником — мягкой роборыбе удалось разогнаться до 0,78 длины тела в секунду.
Авторы отмечают, что показанные устройства — лишь демонстрация метода. Бистабильный позвоночник можно применять в самых разных конструкциях и это простое масштабируемое решение. При этом его можно использовать не только для повышения скорости передвижения, но и, например, для ускорения захвата объектов манипуляторами.
Из других важных разработок для мягких роботов можно отметить электрофлюидные логические схемы, а также полностью мягкий насос. Все это приближает подобные устройства к реальному использованию.
Николай Воронцов
| Сам по себе триггер-это бистабильный мультивибратор. | |
| То есть добавление RC-цепи превращает гистерезисный бистабильный мультивибратор в нестабильный мультивибратор. | |
| Квартет движений — это бистабильный стимул, состоящий из двух точек, которые меняют свое положение от кадра к кадру. | |
| Сигнальная сеть Shh ведет себя как бистабильный коммутатор, позволяя клетке резко переключать состояния при точных концентрациях Shh. | |
| Эта сигнальная сеть иллюстрирует одновременные положительные и отрицательные петли обратной связи, чья изысканная чувствительность помогает создать бистабильный коммутатор. | |
| В электронике триггер или защелка-это схема, которая имеет два стабильных состояния и может использоваться для хранения информации о состоянии – бистабильный мультивибратор. | |
| Сам по себе триггер-это бистабильный мультивибратор. | |
| То есть добавление RC-цепи превращает гистерезисный бистабильный мультивибратор в нестабильный мультивибратор. | |
| Бистабильный квартет движения, где движение точек можно рассматривать как вертикальное или горизонтальное. | |
| Это привело бы к непрерывному ускоряющемуся циклу, который мог бы действовать как необратимый бистабильный триггер. | |
| Действие сворачивания-это поведение устройства, которое щелкает переключатель на месте, обычно используя бистабильный элемент. | |
| Бистабильный элемент имеет два устойчивых стационарных состояния, переходы между которыми происходят, когда внешнее воздействие превышает определенный порог. | |
| Бистабильный выход, который показывает, какой из двух входов имеет более высокое напряжение. | |
| Бистабильный мультивибратор реализован в виде компаратора с гистерезисом. | |
| Бистабильный квартет движения, где движение точек можно рассматривать как вертикальное или горизонтальное. | |
| Другие результаты | |
| В машиностроении бистабильная структура-это структура, имеющая две стабильные механические формы, особенно там, где они стабилизированы различными осями кривизны. | |
| 1968 Бистабильная запоминающая трубка прямого обзора ЭЛТ сохраняет статическую информацию, отображаемую на ней, записанную с помощью управляемого электронного луча, который может быть выключен. | |
| Предложены условия получения в модуляторах максимального электрически управляемого рассеяния света, в том числе с характеристикой бистабильного типа. | |
| Многие шариковые и роллерные выдвижные ручки используют этот тип бистабильного механизма. | |
| Бистабильное поведение может иметь место в механических связях, электронных схемах, нелинейно-оптических системах, химических реакциях, физиологических и биологических системах. | |
| Таким образом, связывание одного субстрата с несколькими ферментами с различной чувствительностью облегчает бистабильное решение для клетки подвергнуться LTD или LTP. | |
| Существуют и другие оптические иллюзии, зависящие от того же или сходного вида зрительной неоднозначности, известной как мультистабильное, в данном случае бистабильное, восприятие. | |
| Без этой двойной обратной связи система все еще была бы бистабильной, но не смогла бы выдержать такой широкий диапазон концентраций. | |
| Я вижу 1N повсюду, в некоторых формулах, как в бистабильной формуле….что представляет собой 1N ? | |
| Распространенным примером бистабильной структуры является браслет для пощечин. | |
| Однако на возникновение бистабильной системы большое влияние оказывает чувствительность ее контуров обратной связи. | |
| В бистабильной конфигурации конденсаторы синхронизации не требуются. | |
| Я добавил изображение 555 в бистабильном режиме на основе изображений для моно-и нестабильных режимов. | |
| Я не думаю, что описание порогового pin-кода в бистабильном описании является правильным. | |
| В бистабильном режиме таймер 555 действует как триггер SR. | |
Клапан соленоидный бистабильный Ду20 SG55415
Клапан электромагнитный SMART SG55415 Ду20 G 3/4″ — это бистабильный соленоидный вентиль, предназначенный для воды, воздуха, рассолов и других рабочих сред, не агрессивных к материалам клапана. Корпус клапана выполнен из латуни (методом отливки), материал мембраны EPDM.
Диапазон температур рабочей среды, которую можно пропускать через клапан -20…+130 градусов Цельсия. Максимальное давление на корпус 16 бар, перепад от 0,5 до 16 бар избыточного давления. Данные клапаны обычно устанавливают после насосов, компрессоров, в водопроводах промышленного и бытового назначения.
По выбору клиента клапан Ду20 SMART SG55415 комплектуется катушкой серии «EB» заданного вольтажа 12В или 24В постоянного тока. Стоимость катушки и DIN коннектора входит в стоимость клапана. Класс защиты катушек IP65.
Принцип работы бистабильного электромагнитного клапана пилотного действия: при подаче на катушку импульса клапан открывается, при подаче импульса обратной полярности клапан закрывается. Клапан находится в открытом или в закрытом положении до того момента, пока не будет подан импульс обратной полярности. Таким образом, для удержания положения открыто или закрыто не требуется наличие напряжения на электромагнитной катушке.
Основные меры предосторожности при установке и работе с электромагнитным клапаном Ду20 мм SG55415:
1) Данная запорная арматура однонаправленного действия. Запрещено подавать рабочую среду в направлении противоположном указанному на корпусе, это может привести к выходу мембраны из строя.
2) Из-за того, что данный вид соленоидного клапана пилотного действия, то монтаж на трубопроводе строго горизонтально (катушкой вверх), при несоблюдении данного условия клапан может не открыться или не закрыться.
3) Наличие минимального перепада давления обязательно, при самотёке рабочей среды клапаны работать не будут.
В наличии так же есть запасные мембраны, катушки, таймеры, регуляторы тока клапана.
Технический паспорт на клапан по ссылке: Технический паспорт SG5541 DN15-50.
БИСТАБИЛЬНЫЙ ВЫКЛЮЧАТЕЛЬ
Схема эта по-сути является усовершенствованной моделью (без применения электромагнитного реле — на транзисторах) раннее публиковавшейся конструкции самодельного импульсного бистабильного реле. На этот раз сделано всё на основе полевого силового транзистора, управляемого биполярным. Конечно в Сети уже существуют похожие решения, но решено было создать такую принципиальную схему самому, чем долго и безуспешно (ведь не все опубликованные схемы реально рабочие) искать готовые решения по разным радиолюбительским сайтам.
Схема и принцип действия бистабильного выключателя
- После подключения источника питания система находится в состоянии покоя, а конденсатор C1 заряжается через резисторы R2 и R3.
- После нажатия кнопки SW конденсатор C1 активирует транзистор Q2, который, в свою очередь, включает транзистор Q1. В то же время резистор R1 закорочен транзистором Q1 и, таким образом, поддерживает транзистор Q2 в заданном состоянии.
- Другое нажатие кнопки SW снова закорачивает базу транзистора Q2 на С1 и, таким образом, отключает всю систему.
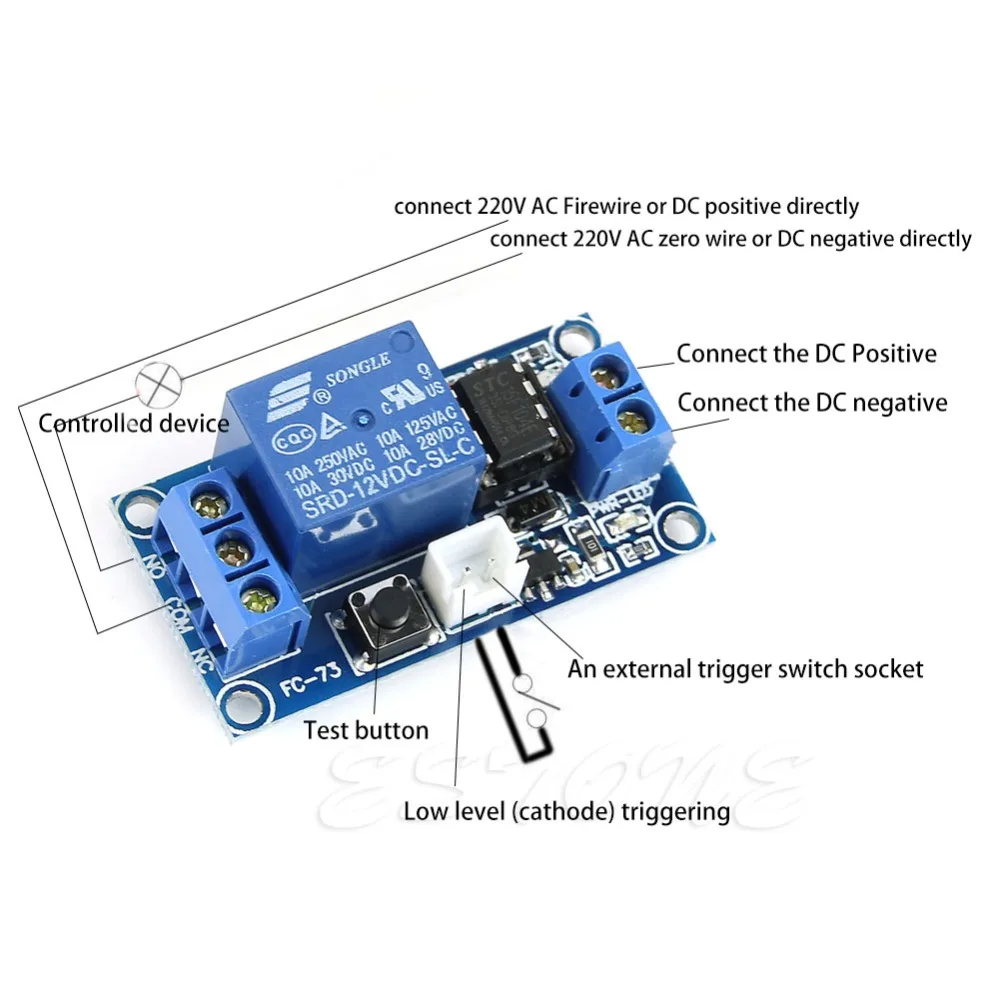
Варианты подключения модуля
Собранная схема немного отличается от приведённой — имеет дополнительные фильтры от помех, которые могут возникнуть из-за дребезга контакта, а также помех внешних, таких как мобильные телефоны или атмосферные разряды.
Пружины, видимые снизу платы, используются для лучшего рассеивания тепла при больших токах, в зависимости от используемого транзистора и подключенной нагрузки.
Упрощённый вариант схемы
Используя кнопку типа SPDT (с переключением контактов), можно собрать бистабильный триггер всего на одном MOSFET транзисторе (например BS170 или BUZ10), одном конденсаторе и резисторе.
Держа палец, вы не включите-выключите её. Только после каждого отпускания кнопки транзистор переходит в противоположное состояние:
- Транзистор закрыт, потенциал затвора равен 0 В. Нажатие кнопки зарядит конденсатор до уровня напряжения на стоке. Отпустите кнопку, чтобы включить затвор.
- Транзистор открыт. Нажатие на кнопку разряжает конденсатор через проводящий канал. Отпускание кнопки разряжает емкость затвора и, следовательно, закрывает его — транзистор перестает проводить ток.
Между затвором и контактом переключателя было бы полезно добавить фильтр RC, чтобы устранить вибрации контактов при переключении (дребезг). Транзистор MOSFET очень быстрый, поэтому он прекрасно передает колебания переключателя на выход в нагрузку. Если нагрузка резистивная — является резистором или лампочкой, это не имеет значения. Но могут быть приборы, в которых этот момент весьма критичен.
Определение бистабильности по Merriam-Webster
би · стабильный | \ (ˈ) bī + \
: с двумя стабильными состояниями бистабильный электрический элемент
Бистабильный мультивибратор или триггерный мультивибратор
Бистабильный мультивибратор — это еще один тип устройства с двумя состояниями, похожий на моностабильный мультивибратор, который мы рассматривали в предыдущем руководстве, но на этот раз разница в том, что ОБА состояния стабильны.
Бистабильные мультивибраторыимеют ДВА, стабильных состояний (отсюда и название: «Bi», что означает два) и поддерживают заданное состояние выхода неопределенно долго, если не применяется внешний триггер, вынуждающий его изменить состояние.
Бистабильный мультивибратор может переключаться из одного стабильного состояния в другое путем подачи внешнего импульса запуска, таким образом, ему требуется два внешних импульса запуска, прежде чем он вернется в исходное состояние. Поскольку бистабильные мультивибраторы имеют два стабильных состояния, они более известны как защелки и триггеры для использования в схемах последовательного типа.
Дискретный бистабильный мультивибратор — это двухпозиционное нерегенеративное устройство, состоящее из двух перекрестно связанных транзисторов, работающих как транзисторные переключатели «ВКЛ-ВЫКЛ». В каждом из двух состояний один из транзисторов отключен, а другой транзистор находится в состоянии насыщения, это означает, что бистабильная схема способна бесконечно оставаться в любом стабильном состоянии.
Для переключения бистабильного режима из одного состояния в другое бистабильная схема требует подходящего импульса запуска, а для прохождения полного цикла требуются два импульса запуска, по одному для каждой ступени.Его более распространенное название или термин «триггер» относится к фактической работе устройства, поскольку оно «переключается» в одно логическое состояние, остается в нем, а затем изменяется или «возвращается» в свое первое исходное состояние. Рассмотрим схему ниже.
Схема бистабильного мультивибратора
Цепь бистабильного мультивибратора , описанная выше, стабильна в обоих состояниях, либо с одним транзистором «ВЫКЛ», а другой «ВКЛ», либо с первым транзистором «ВКЛ» и вторым «ВЫКЛ».Предположим, что переключатель находится в левом положении, положение «А». База транзистора TR 1 будет заземлена и в области отсечки будет давать выход на Q. Это будет означать, что транзистор TR 2 включен, поскольку его база подключена к Vcc через последовательную комбинацию резисторов. R1 и R2. Поскольку транзистор TR 2 находится в состоянии «ВКЛ», на выходе Q будет нулевой выход, противоположный или обратный по отношению к Q.
Если переключатель теперь перемещается вправо, положение «B», транзистор TR 2 переключится в положение «OFF», а транзистор TR 1 переключится в положение «ON» через комбинацию резисторов R3 и R4, что приведет к выходу Q и нулевой выход на Q в обратном порядке.Тогда мы можем сказать, что одно стабильное состояние существует, когда транзистор TR 1 находится в состоянии «ВКЛ», а TR 2 находится в состоянии «ВЫКЛ», положение переключателя «А», и другое стабильное состояние существует, когда транзистор TR 1 находится в состоянии «ВЫКЛ». и TR 2 находится в положении «ON», переключатель в положении «B».
Тогда, в отличие от моностабильного мультивибратора, выход которого зависит от постоянной времени RC используемых компонентов обратной связи, выход бистабильного мультивибратора зависит от приложения двух отдельных запускающих импульсов, положения переключателя «A» или положения «B».
So Бистабильные мультивибраторы могут генерировать очень короткий выходной импульс или гораздо более длинный выходной сигнал прямоугольной формы, передний фронт которого нарастает во времени с внешним импульсом триггера, а задний фронт зависит от второго триггерного импульса, как показано ниже.
Форма волны бистабильного мультивибратора
Ручное переключение между двумя стабильными состояниями может привести к созданию схемы бистабильного мультивибратора, но это не очень практично.Ниже показан один из способов переключения между двумя состояниями с помощью одного единственного триггерного импульса.
Бистабильный мультивибратор с последовательным переключением
Переключение между двумя состояниями достигается применением одного импульса запуска, который, в свою очередь, заставляет транзистор «ВКЛ» выключить, а транзистор «ВЫКЛ» — включить отрицательную половину импульса запуска. Схема будет переключаться последовательно, подавая импульс на каждую базу по очереди, и это достигается с помощью одного входного триггерного импульса с использованием смещенных диодов в качестве схемы управления.
Затем подача первого отрицательного импульса переключает состояние каждого транзистора, а подача второго отрицательного импульса сбрасывает транзисторы обратно в их исходное состояние, действуя как счетчик деления на два. Точно так же мы могли бы удалить диоды, конденсаторы и резисторы обратной связи и подавать отдельные отрицательные триггерные импульсы непосредственно на базы транзисторов.
Бистабильные мультивибраторы имеют множество применений, в которых используются триггерные схемы SR триггеров для использования в счетных схемах или в качестве однобитовых запоминающих устройств в компьютере.Другие применения бистабильных триггеров включают делители частоты, поскольку выходные импульсы имеют частоту, которая ровно половину (/ 2) частоты входных импульсов триггера из-за того, что они меняют состояние от одного входного импульса. Другими словами, схема выдает с частотным разделением , поскольку теперь она делит входную частоту на коэффициент два (октаву).
Бистабильные мультивибраторы TTL / CMOS
Помимо изготовления бистабильного мультивибратора из отдельных дискретных компонентов, таких как транзисторы, мы также можем создавать бистабильные схемы с использованием общедоступных интегральных схем.Следующая схема показывает, как можно построить базовую схему бистабильного мультивибратора, используя всего два логических логических элемента «И-НЕ» с 2 входами.
Бистабильный мультивибратор NAND Gate
Схема выше показывает нам, как мы можем использовать два логических элемента NAND, соединенных вместе, чтобы сформировать базовый бистабильный мультивибратор. Этот тип бистабильной схемы также известен как «бистабильный триггер». Бистабильный мультивибратор с ручным управлением активируется однополюсным двухпозиционным переключателем (SPDT) для создания на выходе сигнала логической «1» или логического «0».
Вы могли заметить, что эта схема выглядит немного знакомой, и были бы правы !. Этот тип бистабильной коммутационной схемы чаще называют SR NAND Gate Flip-flop, он почти идентичен тому, который мы рассматривали в руководствах по последовательной логике. В этом конкретном руководстве мы увидели, что этот тип бистабильного логического элемента NAND представляет собой отличную схему «дребезга переключателя», позволяющую управлять выходом только одним действием переключения.
В следующем руководстве о мультивибраторах мы рассмотрим тот, который имеет NO стабильных состояний, потому что он постоянно переключается из одного стабильного состояния в другое.Этот тип схемы мультивибратора называется нестабильным мультивибратором, также известный под своим более распространенным названием «генератор на плате».
Бистаблей — обзор | Темы ScienceDirect
3.9.B Примеры непрерывного моделирования
Теперь мы будем использовать алгоритм, показанный на рис. 3-7, для моделирования некоторых процессов, которые мы анализировали ранее в этой главе.Мы обнаружим, что такое моделирование может помочь нам увидеть большую часть абстрактности, связанной с непрерывными марковскими процессами, давая нам некоторое представление о том, как эти процессы на самом деле развиваются со временем.
На рис. 3-8a показано моделирование специального винеровского процесса X ( t ) = W ( t ), для которого A ( x , t ) = 0 и D ( x , t ) = 1. Выбранное начальное условие для этого моделирования было X (0) = 0.Точки, образующие зубчатую кривую, представляют собой мгновенные выборки процесса с последовательными приращениями времени 0,0025, что фактически было значением Δ t , используемым для этого моделирования. Поскольку обе характеризующие функции здесь являются константами, то конечность Δ t не вносит ошибок в моделирование; мы могли бы с таким же успехом взять Δ t = 2,5, если бы эта выборка курсера соответствовала нашим целям. Тот факт, что любое положительное значение Δ t будет давать достоверную симуляцию для этого процесса, ясно дает понять, что мы не должны пытаться соединить последовательные точки выборки с какой-либо гладкой кривой. Такие связи означали бы, что X ( t ) дифференцируем в областях интерполяции, и мы знаем, что это не так для этого или любого другого действительно стохастического непрерывного марковского процесса. Две пунктирные кривые на рис. 3-8a разграничивают конверт одного стандартного отклонения для процесса, который представляет собой интервал
, рис. 3-8. Моделирование специального винеровского процесса X ( t ) = W ( t ) в (a) и его интеграла по времени S ( t ) в (b).Характерные функции для процесса: A ( x , t ) = 0 и D ( x , t ) = 1, а начальное условие — X (0) = 0. Точки, содержащие зубчатые кривые, представляют собой мгновенные выборки соответствующих процессов с интервалами Δ t = 0,0025 единиц времени. Пунктирными кривыми показаны соответствующие теоретические огибающие с одним стандартным отклонением.
〈X (t)〉 ± sdev {X (t)} ⋅
Эта огибающая была рассчитана по формулам.(3.3-10), просто положив t 0 = 0, x 0 = 0, A = 0 и D = 1. Обратите внимание, что конверт расширяется с увеличением t как t 1/2 ⋅
На рис. 3-8b показан интеграл по времени с ( t ) реализации x ( t ) на рис. 3-8a. Пунктирные кривые здесь разграничивают огибающую одного стандартного отклонения для интегрального процесса S ( t ), а именно
〈S (t)〉 ± sdev {S (t)},
, который был рассчитан по формулам.(3.3-11), снова положив t 0 = 0, x 0 = 0, A = 0 и D = 1. Огибающая одного стандартного отклонения для S ( t ), очевидно, расширяется с увеличением t как t 3/2 ⋅
На рис. 3-9 мы показываем еще одно моделирование особого винеровского процесса, которое отличается от моделирования на рис. 3-8. только при выборе «начального числа», используемого для единичного генератора случайных чисел [который генерирует значения для r 1 и r 2 в уравнениях.(3.9-3а)]. Этот прогон демонстрирует, что конверты с одним стандартным отклонением не являются жесткими границами для их процессов; действительно, поскольку функция плотности марковских состояний P ( x , t | x 0 , t 0 ) для любого винеровского процесса является нормальной функцией плотности [см. (3.3-13)], то в любой момент примерно одна треть любого набора моделирования винеровского процесса должна лежать за пределами диапазона одного стандартного отклонения.
Рисунок 3-9. Еще одно моделирование специального винеровского процесса и его интеграла, отличающееся от моделирования на рис. 3-8 только выбором «начального числа» для единичного генератора случайных чисел. Траектории X ( t ) на этом и предыдущем рисунках приблизительно описывают явление самодиффузии , как будет показано позже в подразделе 4.4.C, но не, как иногда утверждают, явление броуновского движение.
Иногда предполагается, что специальный винеровский процесс, смоделированный на рис.3-8a и 3-9a имитирует броуновское движение , траекторию макроскопически маленькой, но микроскопически большой частицы, которая беспорядочно перемещается во взвешенной жидкости из-за тепловых ударов молекул жидкости. Но на самом деле, если не считать t 1/2 -расширение его огибающей одного стандартного отклонения, винеровский процесс не точно описывает броуновское движение; как мы обнаружили в подразделе 3.4.C и позже подтвердим в разделе 4.5, гораздо лучшая модель броуновского движения обеспечивается интегралом по времени процесса Орнштейна-Уленбека.Однако позже в подразделе 4.4.C мы увидим, что специальный винеровский процесс действительно дает достаточно удовлетворительное описание самодиффузии , траектории молекулы, движущейся в термически уравновешенной жидкости из одинаковых молекул.
На рисунках 3-10 и 3-11 мы показываем два отдельных моделирования винеровского процесса с D , снова равным 1, но с A , теперь равным 1 вместо 0. Масштабы графиков здесь и размеры интервала дискретизации Δ t , такие же, как для предыдущих графиков.Поскольку характеристические функции по-прежнему являются постоянными, эти модели X ( t ) остаются точными для любого значения Δ t . Однако теперь мы можем применить к Δ t критерий построения графика (3.9-9), который ограничивает Δ t , так что стохастические колебания в X ( t ) будут различимы по детерминированному дрейфу. Наш выбор Δ t = 0,0025 в этом случае, очевидно, соответствует принятию ε 2 в уравнении.(3.9-9) равняется 0,05. Это означает, что вклад детерминированного дрейфа в x ( t + Δ t ) — x ( t ) обычно составляет около 5% от вклада случайных флуктуаций. Как видно из Ур. (3.3-10), положительное значение константы A в этом случае вызывает линейный рост центра огибающей одного стандартного отклонения для X ( t ) с t ; однако ширина конверта растет только как квадратный корень из t. Это означает, что для достаточно большого t ширина конверта будет очень маленькой по сравнению с положением центра конверта, и процесс X ( t ) будет казаться детерминированным на масштаб его среднего [вспомните обсуждение уравнения. (2.7-31)]. Огибающая одного стандартного отклонения для X ( t ) должна быть визуализирована в контексте графика на рис. 3.2 функции плотности марковских состояний общего винеровского процесса.Огибающая одного стандартного отклонения для интегрального процесса S ( t ), снова рассчитанная по формулам. (3.3-11), поднимается как t 2 и расширяется как t 3/2 ⋅
Рисунок 3-10. Моделирование винеровского процесса X ( t ) с характеристическими функциями A ( x , t ) = 1 и D ( x , t ) = 1, и его интеграл по времени S ( t ).Обратите внимание на «дрейф» процесса, вызванный ненулевой функцией дрейфа. Мы использовали те же начальные условия, интервал выборки времени и параметры масштаба графика, что и на двух предыдущих рисунках. Пунктирные кривые снова очерчивают теоретические огибающие с одним стандартным отклонением для X ( t ) и S ( t ).
Рисунок 3-11. Еще одно моделирование винеровского процесса, которое отличается от моделирования на рис. 3-10 только начальным числом, используемым для единичного генератора случайных чисел.Сравните траектории X ( t ) на рисунках 3-10a и 3-11a с графиком на рисунке 3-2 эволюционирующей функции плотности марковских состояний P ( x , t | x 0 , t 0 ) для общего винеровского процесса.
На рис. 3-12a мы показываем моделирование процесса Орнштейна-Уленбека с характеристическими функциями A ( x , t ) = — x и D ( x , t ). ) = 1, а с начальным условием X (0) = 3.Пунктирные кривые снова разграничивают огибающую одного стандартного отклонения, на этот раз рассчитанную по формулам (3.3-20) с t 0 = 0, x 0 = 3, k = 1 и D = 1. При выборе Δ t для этого графика мы сначала отметили, что условие точности первого порядка (3.9-8) здесь:
Рисунок 3-12. Моделирование процесса Орнштейна-Уленбека с характеристическими функциями A ( x , t ) = — x и D ( x , t ) = 1 и начальным условием Х (0) = 3.Процесс X ( t ) моделируется на (a), а его интеграл по времени S ( t ) моделируется на (b). Шаг по времени для моделирования здесь был Δ t = 0,0025, как и в предыдущих моделированиях. Пунктирные кривые — соответствующие огибающие одного стандартного отклонения.
Δt ≤ Min {ε11, ε120} = ε1 ⋅
Выбор Δ t = 0,0025, использованный в предыдущих моделированиях, таким образом, должен быть вполне приемлемым с точки зрения условия точности первого порядка.Необязательное условие построения графика (3.9-9) гласит:
Δt ≤ ε22 · 1 / x2 = (ε2 / x) 2⋅
Значение Δ t = 0,0025, использованное в предыдущих моделированиях, будет соответствовать ε 2 ≤ 0,05 для | x | ≤ 1, и до ε 2 ≤ 0,15 для | x | ≤ 3; поэтому выбор Δ t = 0,0025 вполне приемлем и в данном случае. Это моделирование X ( t ) следует сравнить с графиком функции плотности марковских состояний для процесса Орнштейна-Уленбека, показанным на рис.3-3. Классический пример стабильного стабильного непрерывного марковского процесса [см. Уравнения (3.3-25)]: X ( t ) в конечном итоге колеблется около стабильного состояния x = 0 со стандартным отклонением ( D / 2 k ) 1/2 = (1/2) 1/2 ≈ 0,707.
На Рис. 3-12b показан временной интеграл вышеупомянутой реализации X ( t ). Пунктирные кривые здесь представляют собой конверт одного стандартного отклонения для S ( t ), рассчитанный по формуле.Уравнения (3.3-21) с t 0 = 0, x 0 = 3, k = 1 и D = 1. Эти уравнения подразумевают, что центр огибающей для S ( t ) асимптотически приближается к постоянному значению 3, в то время как ширина конверта асимптотически растет как t 1/2 . Как мы обнаружили в подразделе 3.4.C [и более подробно рассмотрим в разделе 4.5], S ( t ) здесь приблизительно описывает траекторию частицы, совершающей броуновское движение, а X ( t ) описывает траекторию скорость частицы.
На рис. 3-13 показаны результаты другого моделирования процесса Орнштейна-Уленбека, которое отличается от предыдущего моделирования только начальным числом, используемым для генератора однородных случайных чисел с единичным интервалом.
Рисунок 3-13. Еще одно моделирование процесса Орнштейна-Уленбека, отличающееся от моделирования на рис. 3-12 только начальным числом, используемым в генераторе случайных чисел. Сравните траектории X ( t ) на рисунках 3-12a и 3-13a с графиком P ( x , t | x 0 , t 0 ) на рис.3-3. Траектории S ( t ) на рисунках 3-12b и 3-13b приблизительно описывают явление броуновского движения , как показано в подразделе 3.4.C и далее в разделе 4.5.
На рис. 3-14 мы показываем два моделирования процесса Орнштейна-Уленбека с квадратичным шумом с A ( x , t ) = — x и D ( x , t ) = 1 + x 2 . Начальные условия и частота построения графиков для этих двух прогонов идентичны таковым для «простых» прогонов моделирования Орнштейна-Уленбека на предыдущих двух рисунках; однако размер временного шага Δ t был выбран меньшим.Так как в данном случае
Рисунок 3-14. Два моделирования процесса Орнштейна-Уленбека с квадратичным шумом с характеристическими функциями A ( x , t ) = — x и D ( x , t ) = 1 + x 2 , для начального условия X (0) = 3. Эти графики имеют тот же масштаб и частоту построения, что и на рисунках 3-12a и 3-13a, но использовалось меньшее значение Δ t . для поддержания точности моделирования.Функция P s ( x ) для этого процесса — сплошная жирная кривая на рис. 3-4; сплошная кривая , светлая на фиг. 3-4 — это функция P s ( x ) для обычного процесса Орнштейна-Уленбека, смоделированного на рисунках 3-12a и 3-13a.
∂x A (x, t) = −1 и ∂xD1 / 2 (x, t) = x (1 + x2) −1/2,
тогда условие точности первого порядка (3.9-8) читает
Δt ≤ Min {ε11, ε12 (1 + x2) x2} ≤ε12,
, где последнее неравенство действительно для всех x. Поскольку мы не хотим выбирать ε 1 больше 0,01, мы возьмем Δ t = 0,0001. Однако, чтобы сохранить для целей сравнения ту же частоту построения графиков, что и в предыдущих графиках моделирования, мы построили график только для каждого двадцать пятого временного шага. Результирующий интервал построения 0,0025 соответствует значению ε 2 в условии построения графика (3.9-9)
ε2 = (0,0025) 1/2 | A (x, t) | D1 / 2 (x, t ) = 0,05 x (1 + x2) 1/2 ≤ 0,05,
, что вполне приемлемо.Обратите внимание на сильные колебания X ( t ), когда процесс далек от нуля; это, конечно, является следствием того факта, что функция диффузии D ( x , t ) быстро увеличивается с | x |. Подобно обычному процессу Орнштейна-Уленбека на рисунках 3-12а и 3-13а, процесс Орнштейна-Уленбека с квадратичным шумом имеет x = 0 в качестве устойчивого состояния. Но, как мы видим из рисунка 3-4, стационарные функции плотности марковских состояний этих двух процессов не совпадают, при этом функция для процесса с квадратичным шумом имеет более тяжелые хвосты и более острые пики.Несмотря на то, что асимптотическое стандартное отклонение больше, чем у обычного процесса, процесс квадратичного шума фактически проводит больше времени в непосредственной близости x = 0, явление, которое мы назвали «устойчивостью с повышенным шумом». [См. обсуждение уравнений. (3.6-10) и (3.6-11).]
На рисунке 3-15 мы показываем четыре отдельных прогона моделирования непрерывного бистабильного марковского процесса, определяемого характеристическими функциями в уравнениях (3.6-18a), а именно
Рисунок 3-15.Показаны траектории четырех отдельных прогонов моделирования непрерывного бистабильного марковского процесса на рис. 3-5, для которых A ( x , t ) = — x ( x + 1.5 & gt; ( x — 1,7) и D ( x , t ) = 1.0. В каждом из этих четырех прогонов было X (0) = 0 и Δ t = 0,00025, только с каждой десятой точкой шага построены, чтобы сохранить ту же частоту построения, что и на предыдущих графиках.Пунктирными горизонтальными линиями показаны номинальные диапазоны стабильного состояния [ x i — σ i /2, x i + σ i /2], где x i определяет местонахождение максимума пика в стационарной функции плотности марковского состояния P s ( x ), а σ i — гауссова эффективная ширина этого пика. Переходы в стабильные состояния относительно редки на временной шкале этих графиков, но спонтанный переход от x 1 к x 2 , очевидно, происходит в (d).
A (x) = −x (x + 1,5) (x − 1,7), D (x) = 1,0.
В подразделе 3.6.C [см. Рис. 3-5] мы показали, что этот процесс имеет два стабильных состояния: x 1 = — 1,5 и x 2 = 1,7, с соответствующими ширинами σ 1 = 0,8090 и σ 2 = 0,7599, эти два стабильных состояния разделены состоянием барьера x b = 0. Все четыре моделирования, показанные на рис. 3-15, использовались для временного шага Δ t = 0,00025, но чтобы сохранить ту же частоту построения, что и на предыдущих графиках, мы построили только каждый десятый шаг.Наш выбор Δ t руководствовался условием точности первого порядка (3.9-8), которое в данном случае означает, что D ( x ) не зависит от x ,
Δt ≤ Min {ε1 | ∂xA (x, t) |} = Min {ε1 | 3×2−0.4x — 2.55 |} ⋅
Для x ∈ [- 3, 3] знаменатель справа имеет максимальное значение 25,65; таким образом, выбор Δ t = 0,00025 означает, что ε 1 может быть присвоено значение 0,0064, что кажется более разумным, чем значение 0.064, что получилось бы, если бы мы взяли Δ t = 0,0025.
Все четыре прогона на рис. 3-15 имели x 0 = 0, так как это состояние барьера x b , [см. Рис. 3-5], то процесс имеет примерно равный вероятность перехода либо в верхнее стабильное состояние x 2 , как на рис. 3-15a, либо в более низкое стабильное состояние x 1 , как на рис. 3-15b. Пунктирные горизонтальные линии на этих рисунках разграничивают интервалы [ x i — σ i /2, x i + σ i /2], где σ i — это вышеупомянутая гауссова ширина пика x i в стационарной функции плотности марковского состояния P s ( x ).Из рисунков 3-15a и 3-15b видно, что как только процесс входит в определенную область стабильного состояния [ x i — σ i /2, x i + σ i /2], он более или менее доволен оставаться там. Выполнение моделирования на рис. 3-15c интересно тем, что сначала процесс демонстрирует значительную неуверенность в том, в какое стабильное состояние он хочет перейти: сначала он переходит в стабильное состояние x 2 , но затем, похоже, почти имеет второе состояние. мысли об этом решении.Фактически, из нашей разработки в разделе 3.7 мы знаем, что процесс не будет вечно зависать в каком-либо одном стабильном состоянии, а будет совершать «переходы» туда и обратно между двумя стабильными состояниями. И в моделировании, показанном на рис. 3-15d, процесс сначала переходит в стабильное состояние x 1 , но впоследствии совершает самопроизвольный переход в стабильное состояние x 2 ⋅
На рис. 3-16 мы показываем четыре отдельных прогона моделирования непрерывного бистабильного марковского процесса, определяемого характеристическими функциями в уравнениях.(3.6-19a), а именно
Рисунок 3-16. Показаны траектории четырех отдельных прогонов моделирования непрерывного бистабильного марковского процесса на рис. 3-6, для которых A ( x , t ) = — x ( x + 1,5) ( x — 1,7) и D ( x , t ) = 1,0 + 0,25 x 2 . Каждый из этих четырех прогонов был запущен в состоянии барьера x b = 0, и использовались те же Δ t и частота построения графиков, что и в четырех прогонах моделирования на рис.3-15. По сравнению с процессом, смоделированным на рис. 3-15, полосы стабильного состояния для этого процесса, очевидно, шире и немного смещены в сторону начала координат [сравните рис. 3-5 и 3-6], эти эффекты являются результатом квадратичного члена в функции диффузии D ( x , t ). Спонтанный переход из стабильного состояния x 2 в стабильное состояние x 1 почти происходит в (c) и действительно происходит в (d).
A (x) = −x (x + 1.5) (x − 1,7), D (x) = 1,0 + 0,25 x2⋅
В подразделе 3.6.C [см. Рис. 3-6] мы показали, что этот процесс имеет два стабильных состояния: x 1 = — 1,42 и x 2 = 1,62, с соответствующими ширинами σ 1 = 1,0461 и σ 2 = 1,0278, разделенными состоянием барьера x b = 0. Как и в прогонах моделирования на рис. .3-15, все эти прогоны здесь имели x 0 = 0 и Δ t = 0,00025, и были нанесены на график через каждые 0.0025 единиц времени. Чтобы проверить условие точности (3.9-8) для нашего значения Δ t , отметим, что в данном случае оно читается как
Δt ≤ Min {ε1 | 3×2−0,4x — 2,55 | , (Ε1x / [2 (4 + x2) 1/2]) 2} ⋅
В предыдущем примере мы обнаружили, что для x ∈ [- 3,3) и Δ t = 0,00025 первая величина в минимальных фигурных скобках соответствует принятию ε 1 = 0,0064. Для второго члена в минимальных фигурных скобках имеем
ε1 = Max {x2 (4 + x2) 1/2 (0,00025) 1/2} = 0.0066,
, где максимизация берется за интервал x [- 3,3]. Таким образом, значение ε 1 для этих симуляций становится 0,0066, что «достаточно мало».
Как и следовало ожидать из сравнения графиков стационарных функций плотности марковских состояний P s ( x ) на рисунках 3-5 и 3-6, реализации процесса на рисунках 3-16 имеют несколько более «рыхлую» стабильность. состояний, чем реализации процесса на рис. 3-15. При моделировании на рис.3-16a процесс сначала переходит в стабильное состояние x 2 , в то время как в моделировании фиг. 3-16b процесс сначала переходит в стабильное состояние x 1 . Моделирование, показанное на рис. 3-16c, показывает процесс, почти переходящий из стабильного состояния x 2 в стабильное состояние x 1 ; такой переход действительно происходит в моделировании, показанном на рис. 3-16d⋅
. Мы завершим этот раздел, а следовательно, и наше обсуждение непрерывных марковских процессов, изучив результаты некоторых исследований Монте-Карло времен перехода между стабильными состояния двух бистабильных процессов на рис.3-15 и 3-16. С самого начала, возможно, следует отметить, что такие исследования часто невозможны из-за того факта, что среднее время для перехода в стабильное состояние, как правило, чрезвычайно велико по сравнению с наибольшим допустимым временным шагом моделирования Δ t. Однако для систем на рисунках 3-15 и 3-16 исследования методом Монте-Карло находятся в пределах осуществимости. Эти исследования полезны не только потому, что они предоставляют конкретные иллюстрации метода анализа Монте-Карло, но и потому, что они углубляют наше понимание общей природы переходов в стабильные состояния.
Чтобы изучить время перехода T ( x i → x f ) из стабильного состояния x i в стабильное состояние x f , мы должны сделать большое число N независимых симуляций процесса X ( t ), каждая симуляция имеет начальное условие X (0) = x i , и каждое завершается, когда процесс сначала достигает (или сначала проходит вверху) состояние x f ⋅ Единственное, что нас интересует в прогоне моделирования k th , — это время t k его завершения, которое, конечно, составляет выборочное значение случайного переменная T ( x i → x f ).Из набора чисел t 1 , t 2 ,…, t N , затем вычисляем две величины
(3.9-10) 1N ∑k = 1N tk ≡ 〈t 〉 N, 1N ∑k = 1N tk2 ≡ 〈t2〉 N⋅
Очевидно, < t > N и < t 2 N примерные соответственно первый и второй моменты T ( x i → x f ), эти приближения становятся точными в пределе N → ∞.И
(3.9-11) σN ≡ [〈t2〉 N− 〈t〉 N 2] 1/2
аналогичным образом аппроксимирует стандартное отклонение T ( x i → x f ). Таким образом, если N «достаточно велик», мы можем использовать следствие центральной предельной теоремы в уравнениях. (1.8-2) и (1.8-3) для оценки среднего T ( x i → x f ) как
(3.9-12) T1 (xi → xf) ≈ 〈t〉 N ± σN N − 1/2,
, где член ± дает доверительный интервал в одно стандартное отклонение.
В двух таблицах ниже показаны результаты такого исследования Монте-Карло времен перехода в стабильное состояние T 1 ( x 1 → x 2 ) и T 1 ( x 2 → x 1 ) для наших двух иллюстративных бистабильных систем. В этих таблицах мы показываем среднее время перехода, сначала вычисленное по точным формулам (3.7-18), а затем вычисленное по формуле Монте-Карло (3.9-12) с использованием N = 1000 выборок для каждого времени перехода. Обратите внимание, что в каждом случае оценка среднего значения методом Монте-Карло находится в пределах одного стандартного отклонения от точного значения, хотя различия здесь до двух стандартных отклонений не были бы поводом для беспокойства. Если бы мы обнаружили различия более чем на три стандартных отклонения, то мы должны спросить, был ли N взят достаточно большим или где-то была сделана ошибка. Но на самом деле превосходное согласие, показанное в таблицах, дает нам твердую уверенность в том, что наша теория времени первого выхода, а также наша методология непрерывного моделирования были правильно разработаны и применены.
| Для бистабильного процесса на рисунках 3-5 и 3-15 | |||
|---|---|---|---|
| Точное уравнение (3.7-18) | Уравнение Монте-Карло. (3.9-12) | σ N / < t N | |
| T 1 ( x 1 → x 2 ) | 50 33.733,1 ± 1,0 | 0,98 | |
| T 1 ( x 2 → x 1 ) | 92.15 | 92,3 ± 2,8 | 0,96 |
| Для бистабильного процесса на рисунках 3-6 и 3-16 | |||
|---|---|---|---|
| Точное уравнение (3,7-18) | Монте-Карло Уравнение (3,9-12) | σ N / < t > N | |
| T 1 ( x 1 → x 51 2 ) 9 | 19,63 | 19.5 ± 0,6 | 0,94 |
| T 1 ( x 2 → x 1 ) | 38,29 | 38,9 ± 1,2 | 0,96 |
