Как работает импульсный блок питания с обратной связью. Из каких основных узлов состоит ИБП. Какие преимущества дает обратная связь по напряжению. Какие схемы стабилизации используются в современных ИБП.
Принцип работы импульсного блока питания с обратной связью
Импульсный блок питания (ИБП) с обратной связью по напряжению — это современное решение для стабильного электропитания различных устройств. Основной принцип его работы заключается в следующем:
- Сетевое переменное напряжение выпрямляется и фильтруется
- Полученное постоянное напряжение преобразуется в высокочастотное переменное с помощью ключевых транзисторов
- Высокочастотный трансформатор понижает напряжение до нужного уровня
- Выходное напряжение выпрямляется и фильтруется
- Цепь обратной связи контролирует выходное напряжение и управляет работой ключевых транзисторов
Благодаря обратной связи ИБП может поддерживать стабильное выходное напряжение при изменениях входного напряжения и нагрузки. Это обеспечивает высокую точность и надежность электропитания.

Основные узлы импульсного блока питания
Современный ИБП с обратной связью состоит из следующих ключевых узлов:
- Входной выпрямитель и фильтр
- Силовые ключи (транзисторы)
- ШИМ-контроллер
- Высокочастотный трансформатор
- Выходной выпрямитель и фильтр
- Цепь обратной связи
- Вспомогательный источник питания
Каждый из этих узлов выполняет важную функцию в работе ИБП. Рассмотрим их подробнее.
Входной выпрямитель и фильтр
Входной выпрямитель преобразует переменное сетевое напряжение в пульсирующее постоянное. Обычно используется мостовая схема на диодах. Затем конденсатор большой емкости сглаживает пульсации.
Основные требования к входному выпрямителю:
- Высокая надежность
- Защита от перенапряжений в сети
- Подавление высокочастотных помех
Качественная фильтрация входного напряжения повышает КПД и надежность всего ИБП.
Силовые ключи и ШИМ-контроллер
Силовые ключи — это мощные транзисторы, работающие в ключевом режиме. Они преобразуют постоянное напряжение в переменное высокой частоты (десятки-сотни кГц). Управляет ключами ШИМ-контроллер.

ШИМ-контроллер формирует управляющие импульсы переменной длительности. Изменяя ширину импульсов, он регулирует выходное напряжение ИБП. Популярные микросхемы ШИМ-контроллеров:
- TL494
- UC3842
- NCP1200
Выбор ШИМ-контроллера во многом определяет характеристики и возможности ИБП.
Высокочастотный трансформатор
Высокочастотный трансформатор является ключевым элементом ИБП. Он выполняет следующие функции:
- Понижает напряжение до требуемого уровня
- Обеспечивает гальваническую развязку
- Позволяет получить несколько выходных напряжений
Благодаря высокой частоте преобразования (20-200 кГц) трансформатор имеет небольшие габариты. Это позволяет сделать ИБП компактным.
Выходной выпрямитель и фильтр
Выходной выпрямитель преобразует переменное напряжение со вторичной обмотки трансформатора в постоянное. Обычно используются быстродействующие диоды Шоттки. LC-фильтр сглаживает пульсации.
Основные требования к выходному выпрямителю:
- Минимальные потери
- Высокое быстродействие
- Эффективное подавление пульсаций
От качества выходного выпрямителя зависит стабильность напряжения питания нагрузки.

Цепь обратной связи
Цепь обратной связи контролирует выходное напряжение ИБП и управляет работой ШИМ-контроллера. Она обеспечивает стабилизацию напряжения при изменениях нагрузки и входного напряжения.
Основные элементы цепи обратной связи:
- Делитель напряжения
- Источник опорного напряжения (например, TL431)
- Оптрон для гальванической развязки
- Усилитель сигнала ошибки
Правильная настройка цепи обратной связи определяет точность стабилизации выходного напряжения ИБП.
Преимущества ИБП с обратной связью
Использование обратной связи по напряжению дает ИБП следующие преимущества:
- Высокая точность стабилизации выходного напряжения (до 1%)
- Возможность регулировки выходного напряжения в широких пределах
- Защита от перегрузки и короткого замыкания
- Высокий КПД (до 90%)
- Малые габариты и вес
Эти преимущества делают ИБП с обратной связью оптимальным выбором для питания современной электроники.
Схемы стабилизации в современных ИБП
В современных импульсных блоках питания используются различные схемы стабилизации напряжения:

- С ШИМ-регулированием
- С частотным регулированием
- С релейным регулированием
- Комбинированные схемы
Наиболее распространена схема с ШИМ-регулированием из-за простоты реализации и хороших характеристик. Выбор конкретной схемы зависит от требований к ИБП.
Заключение
Импульсные блоки питания с обратной связью по напряжению являются современным и эффективным решением для стабильного электропитания различных устройств. Понимание принципов их работы позволяет грамотно выбирать и эксплуатировать такие ИБП.
Основные преимущества ИБП с обратной связью:
- Высокая точность стабилизации
- Широкий диапазон входных напряжений
- Высокий КПД
- Компактность
- Надежность
Эти качества обеспечивают им широкое применение в современной электронной аппаратуре.
Как устроен блок питания, часть 5
В качестве самой просто схемы я покажу вариант с одним диодом и конденсатором. Такая схема используется в обратноходовых блоках питания, которые составляют сейчас подавляющее большинство.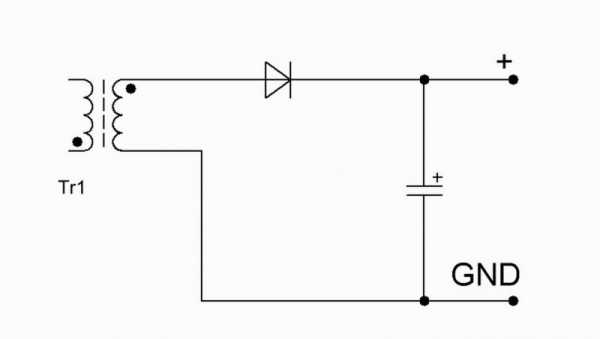
В готовом блоке питания она выглядит так, как показано на этом фото.
Такие блоки питания чаще всего идут в комплекте с недорогой техникой.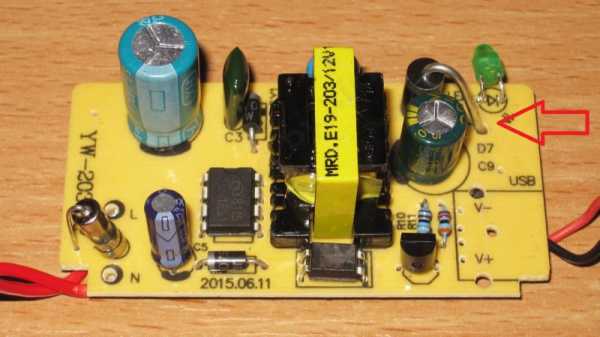
Следующим шагом идет двухполупериодный выпрямитель. Эта схема использовал раньше весьма часто, но в последнее время вытеснена другой, которую я покажу позже.
Такая схемотехника чаще всего встречается в мощных блоках питания, особенно она удобна в нерегулируемых блоках на базе драйвера IR2151-2153, о которых я рассказывал в прошлой части.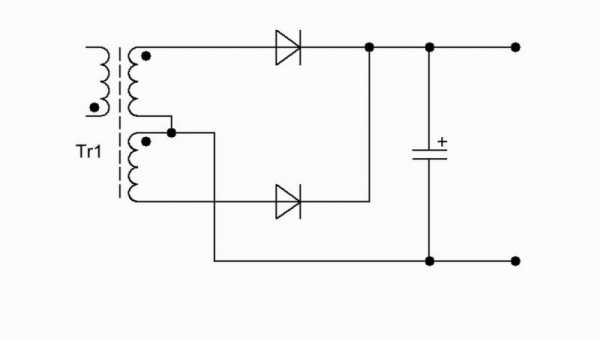
Как я тогда сказал, она хорошо подходит для построения первичных источников питания, которые не являются стабилизированными, но которые имеют хороший КПД и могут использовать для питания других устройств, например как этот блок питания лабораторного источника питания.
Особое преимущество данной схемы в том, что ее очень легко переделать в двухполярную и использовать для питания усилителей мощности. В таком варианте добавляется всего пара диодов и конденсатор.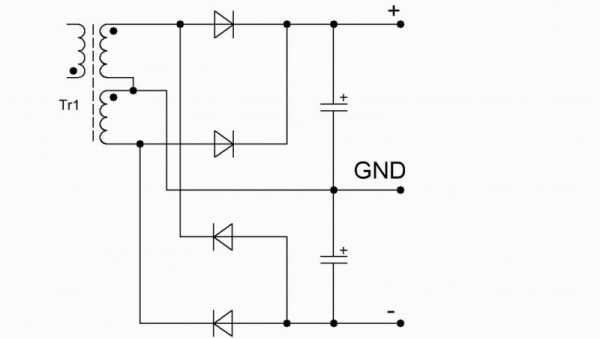
Когда мощности обратноходовой схемотехники не хватает, то используют ее прямоходовый вариант. Здесь энергия при одном такте сначала накапливается в дросселе, а потом через нижний диод поступает в нагрузку. Данная схемотехника очень похожа на схему классического StepDown преобразователя.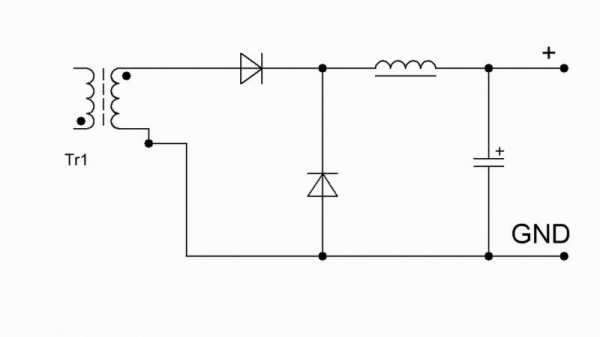
Заметить что блок питания собран по такой схемотехнике очень просто, на плате будет большой дроссель. В качестве фильтрующих дроссели с таким габаритом используют крайне редко, потому ошибиться сложно.
Но есть альтернативный вариант этой схемы. Он применяется чаще всего в компьютерных блоках питания и ведет свои истоки от первых БП формата АТ.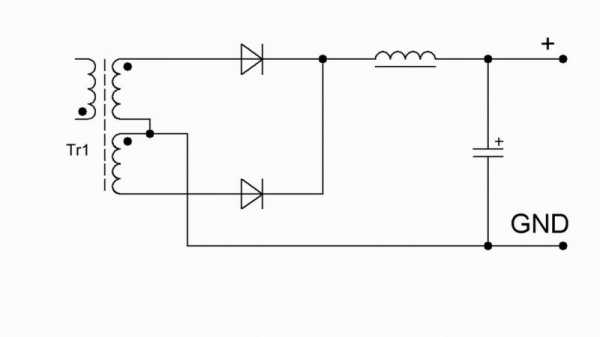
Здесь присутствует накопительный дроссель, а первичная обмотка силового трансформатора связана с одной из обмоток трансформатора управления. Если изъять дроссель из этой схемы, то блок питания при нагрузке выше определенной выйдет из строя.
То же самое касается и предыдущей схемы.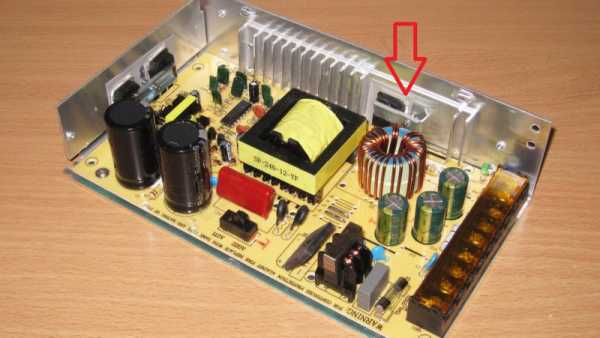
Отличить блоки питания последних двух типов очень легко, слева БП построенный по аналогии блока питания АТ формата, у него сразу заметен трансформатор около транзисторов, справа однотактный прямоходовый, трансформатора здесь нет.
Дроссели имеют разные размеры, но это следствие разной рабочей частоты и иногда экономии производителя. Меньший дроссель в работе скорее всего будет перегреваться, да и схема можно работать не очень надежно при максимальной мощности.
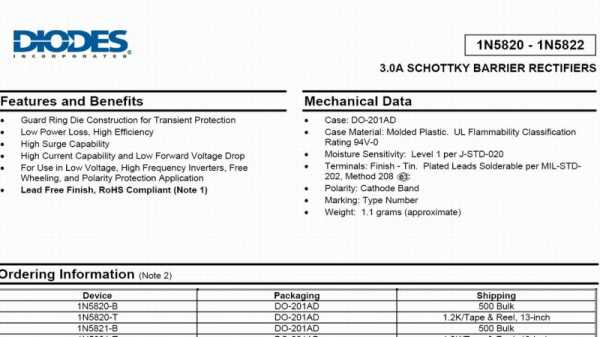
Чаще всего в качестве выходных диодов импульсных блоков питания используются диоды Шоттки. Они имеют два важных преимущества перед обычными:
1. Падение напряжения на них в 1.5-2 раза меньше
2. Они быстрее, чем обычные диоды, потому имеют меньше потер при переключении.
В блоках питания рассчитанных на высокое выходное напряжение применяют чаще всего обычные диоды, так как прямое падение у высоковольтных обычных и Шоттки примерно одинаково. Но из-за того что Шоттки быстрее, можно получить уменьшенные потери на снаббере, потому я советую применять их и здесь.
Так как после выпрямления на конденсаторе будут присутствовать заметные пульсации, то после него ставят LC фильтр или говоря простым языком — дроссель и конденсатор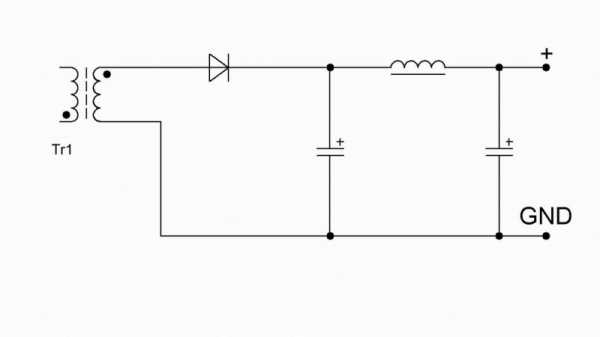
Для примера "народный" блок питания где явно виден как дроссель, так и два конденсатора.
Дроссель необязательно будет большим, а вполне может быть совсем миниатюрным. Работать правда он будет хуже, но это лучше чем ничего.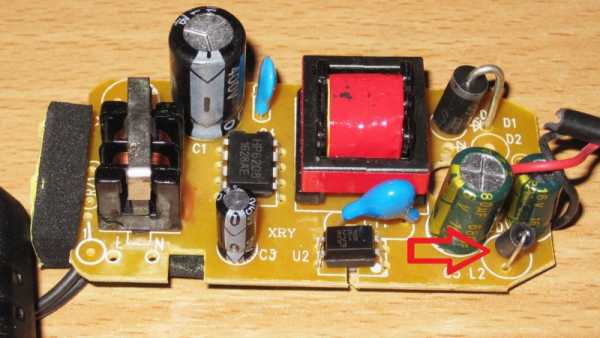
Иногда дроссель вообще не ставят, хотя место под него есть. Это банальная экономия "на спичках", я всегда рекомендую установить на это место дроссель.

Для примера уровень пульсаций без дросселя и с дросселем. Но стоит учитывать, что после установки дросселя пульсации на первом конденсаторе вырастут, так как на него будет приходится "ударный" ток. Обычно именно он выходит из строя первым.
Улучшить ситуацию можно установив параллельно электролитическим конденсаторам керамические. Данная мера можно существенно облегчить режим работы электролитов. Но стоит иметь в виду, что эффективно они работают только при относительно небольших мощностях БП, а точнее при относительно небольших токах. Можно конечно поставить много таких конденсаторов, но это дорого и габаритно.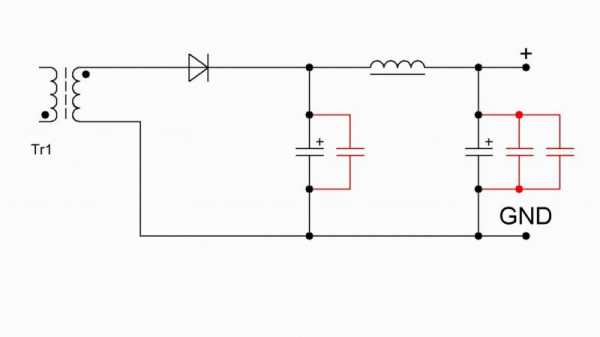
При доработке конденсаторы можно напаивать прямо на выводы электролитических конденсаторов.
Я применяю конденсаторы с емкостью 0.1-0.47мкФ.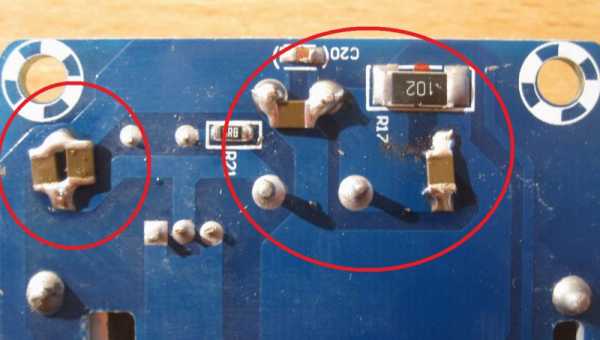
Чтобы еще немного улучшить качество работы, следует внимательнее отнестись к разводке печатной платы. Если страссировать плату по типу того как я показал на схеме, то пульсации могут еще немного уменьшиться, тем более что это бесплатно.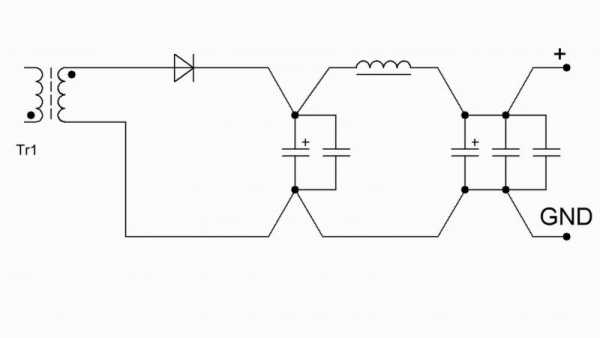
Ну и последний шаг, установка синфазного дросселя на выходе блока питания. Такое применяется чаще всего в фирменных блоках питания, которым требуется проходить сертификацию на уровень помех излучаемых в эфир. В дешевых практически никогда не встречается.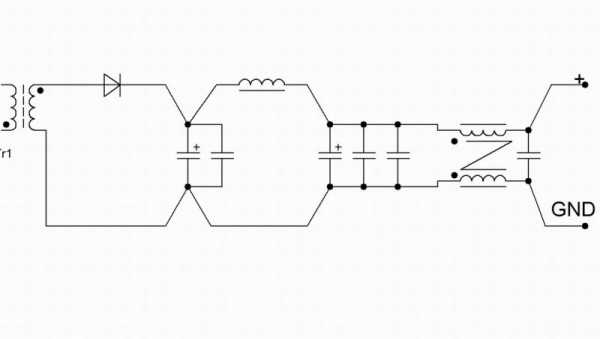
Теперь об выходных конденсаторах.
Если вы пользуетесь дешевыми блоками питания, то скорее всего на выходе увидите либо вообще безымянные модели.
Либо подделку под фирменные. Например в народном блоке питания применяют подделки под Sanyo или Nichicon, проверить очень просто, по маркировке. Скорее всего вы либо вообще не найдете конденсаторов такой серии, либо в этой серии не будет такого номинала с таким габаритом как у вас, либо внешне они будут отличаться цветом, как в данном случае.
Такие подделки на самом деле не самый худший вариант, но лучше применять фирменные.
Кстати в двухтактных БП конденсаторы обычно живут дольше и требования к их качеству меньше чем у обратноходовых однотактных.
Но все равно, лучше применять именно фирменные конденсаторы, а не суррогаты с их именем. На фото блок питания фирмы Менвелл.
Для облегчения работы конденсаторов есть способ, когда вместо одного двух емких устанавливают много менее емких конденсаторов. В таком варианте нагрузка лучше распределяется и конденсаторы живут дольше.
Схема стабилизации.
Самый простой вариант — стабилизировать напряжение по обратной связи со вспомогательной обмотки трансформатора, правда такое решение и самое плохое в плане стабильности, так как влияет магнитная связь между обмотками и их активное сопротивление, зато дешево.
Следующий вариант сложнее, здесь в качестве порогового элемента применен стабилитрон. В таком варианте выходное напряжение Бп будет равно падению на стабилитроне + напряжению на светодиоде оптрона. Характеристики схемы так себе, но вполне приемлемы для некритичных нагрузок.
Например блок питания с такой стабилизацией. Сверху около оптрона ничего нет.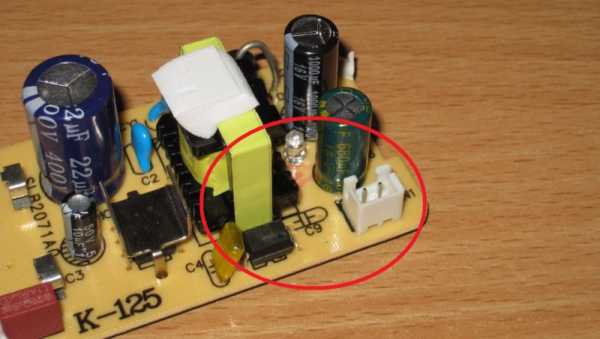
Снизу расположен стабилитрон и несколько резисторов
Но куда лучшие характеристики показывает схема с регулируемым стабилитроном TL431. Она имеет куда выше качество работы и точность поддержания в том числе лучше держит параметры при изменении температуры.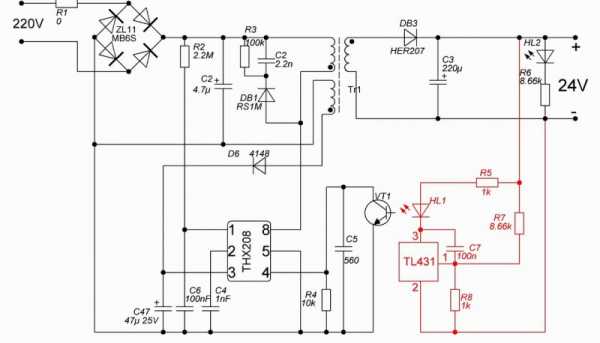
На плате она обычно выглядит так, как показано на фото.
Выглядит он примерно как обычный транзистор в корпусе ТО-92, отличие только в маркировке. Данный вариант встречается чаще всего. Альтернативный вариант, который вы можете встретить, SMD корпус SOT-23.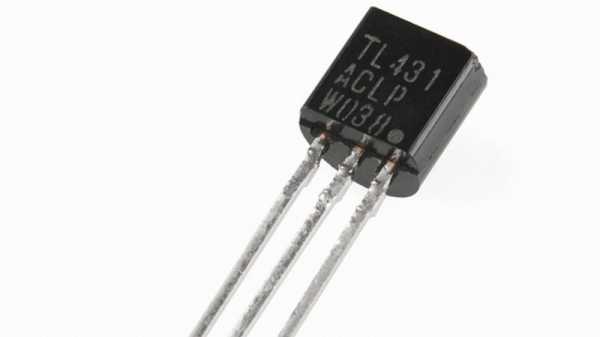
Расположение выводов в разных вариантах корпуса.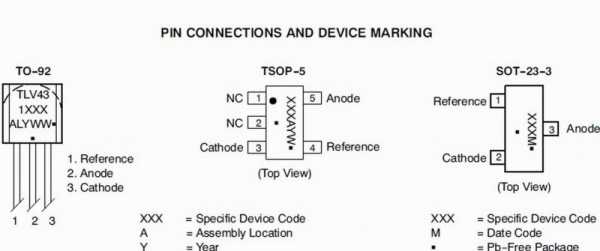
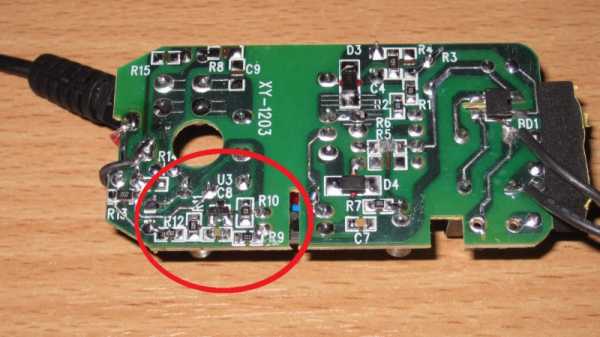
Например в "народном" блоке питания применен SMD вариант корпуса. На фото видны резисторы делителя обратной связи и вспомогательные, например "подтяжки" к питанию чтобы сформировать минимальный рабочий ток для стабилитрона.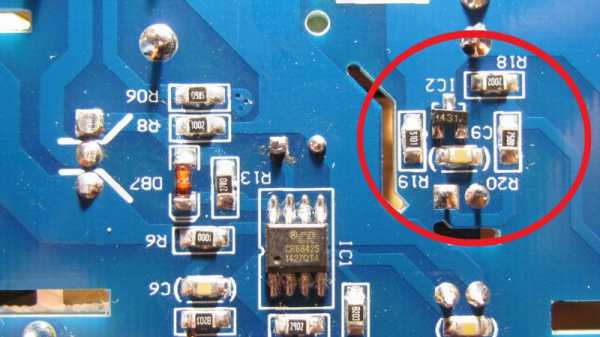
Еще пара фото, сверху платы ничего нет, а стабилитрон TL431 находится снизу.
Иногда в цепи обратной связи ставят подстроечный резистор. Но сначала я скажу пару слов о том, как рассчитывается делитель.
Если применяется стандартный делитель из двух резисторов, то его номиналы подбираются таким образом чтобы при требуемом выходном напряжении в точке соединения было 2.5 Вольта, именно на это напряжение и рассчитана TL431, но стоит учитывать, что есть и более низковольтный вариант этой микросхемы, на 1.25 Вольта, хотя встречается он гораздо реже.
Теперь к подстроечному резистору. Для большего удобства на плате может располагаться подстроечный резистор, позволяющий менять выходное напряжение в небольших пределах, чаще всего +/- 10-20%, больший диапазон не рекомендуется, так как Бп может вести себя нестабильно.
Подстроечный резистор всегда должен стоять последовательно с нижним резистором делителя, тогда в случае выхода его из строя вы получите на выходе Бп минимальное напряжение, а не максимальное, как если бы подстроечный резистор стоял сверху.
Кроме того подстроечные резисторы часто имеют низкую надежность, и если вам не нужна эта функция, то лучше заменить его на постоянный, предварительно подобрав его номинал.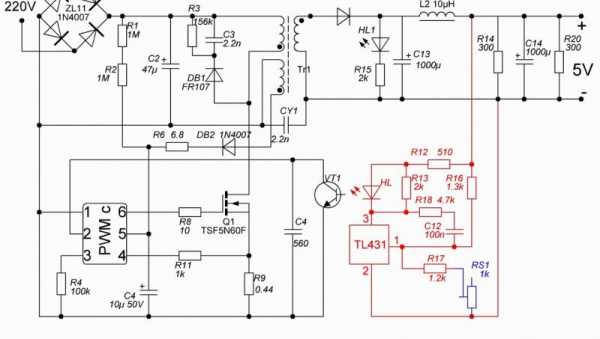
Полностью на плате весь этот узел выглядит следующим образом.
Пару слов о выходном нагрузочном резисторе.
Импульсный блок питания плохо работает без нагрузки, потому параллельно выходу обычно ставят нагрузочный резистор, обеспечивающий минимально необходимую нагрузку при которой БП работает стабильно.
Есть и минус у данного решения, резистор обычно греется, причем иногда заметно. Кроме того этот резистор может греть конденсаторы если они стоят рядом, как на этом фото.
Иногда они греются так, что на плате становятся видны следы перегрева. Но кроме того этот нагрев может плохо сказываться на стабильности БП если он подогревает резисторы делителя обратной связи и они при этом применены обычного типа, а не точные/термостабильные.
Резисторы греются, параметры начинают меняться и меняется выходное напряжение БП, потому рекомендуется располагать резисторы делителя так, чтобы они не были подвержены нагреву, а кроме того лучше применять точные резисторы, на которые нагрев влияет существенно меньше.
Иногда производители неправильно выбирают номинал нагрузочного резистора и он начинает греться сильнее чем допустимо. Например в 24 Вольте версии "народного" блока питания как раз была такая ситуация, пришлось поменять его потом на резистор в два раза большего номинала.
Чтобы ваши блоки питания работали надежно, следует внимательно отнесись к подбору компонентов.
Диоды выбираются из расчета двухкратного запаса для двухтактной схемы и трехкратного для однотактной, например БП 5-7 Ампер, значит диод ставим на 15-20.
Напряжение должно быть не менее чем в четыре раза больше чем выходное у блока питания, если БП на 12 Вольт, то диод на 60, если на 24, то на 100.
Все эти параметры есть в даташите на диоды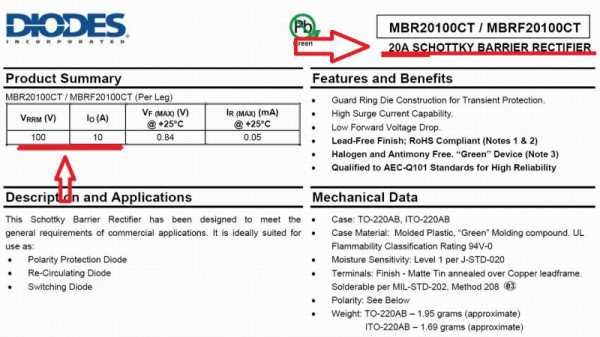
Также они указаны на самих диодах.
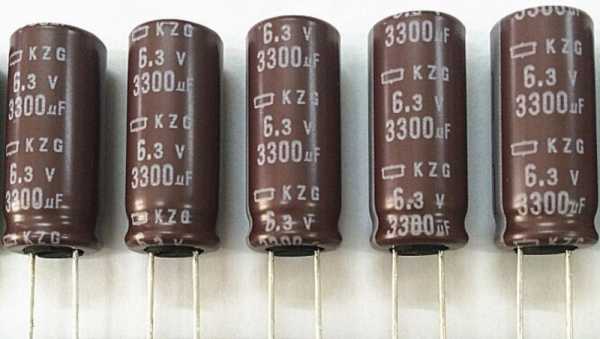
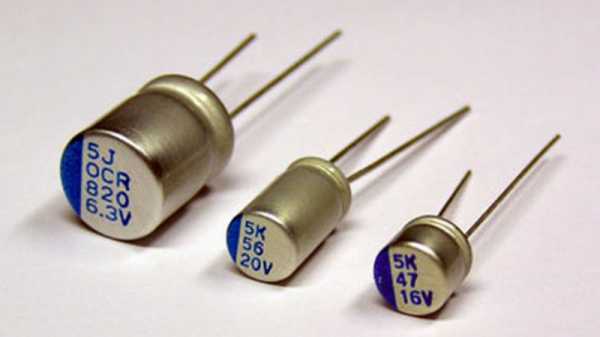
Конденсаторы следует выбирать низкоимпедансные или LowESR, это также обычно отражено в даташите на компонент.
Емкость выбираем из расчета 0.5-1 тысяч мкФ на 1 Ампер выходного тока. Напряжение — для двухтактной схемы 1.5-2 раза выше чем выходное, для обратноходовой однотактной — не менее чем 2х от выходного.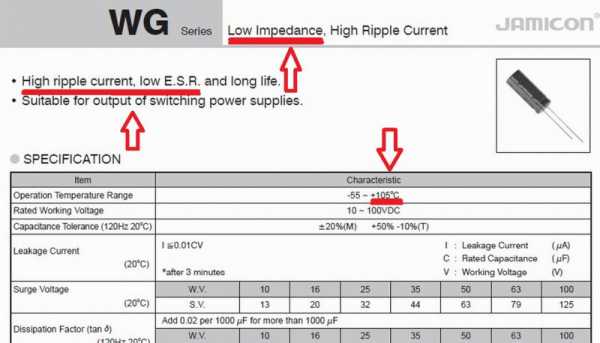
По фирмам смотрим чтобы были известные бренды, но это я писал и в статье про входной фильтр, здесь рекомендации аналогичны.


С выходным дросселем все гораздо проще, номинальный ток дросселя не менее чем максимальный выходной ток блока питания. Лучше применить дроссель на больший ток, тогда его нагрев будет существенно меньше. Индуктивность 4.7-22мкГн, зависит от выходного тока, так как дроссель на большой ток и индуктивность будет весьма большим.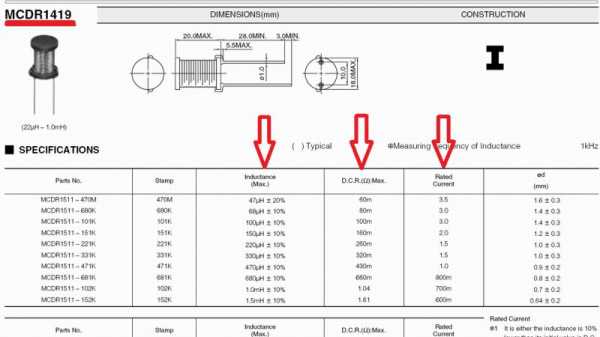
Обычно дроссели выполняются либо в виде "гантельки", либо в "броневом" исполнении, вторые чаще предназначены для поверхностного монтажа.

В общих чертах на этом все, и конечно видеоверсия данной статьи. Как всегда буду рад вопросам и пожеланиям.
www.kirich.blog
| В статье речь об импульсных блоках питания (далее ИБП), которые сегодня получили самое широкое применение во всех современных радиоэлектронных устройствах и самоделках. Основной принцип заложенный в основу работы ИБП заключается в преобразовании сетевого переменного напряжения (50 Герц) в переменное высокочастотное напряжение прямоугольной формы, которое трансформируется до требуемых значений, выпрямляется и фильтруется. Преобразование осуществляется с помощью мощных транзисторов, работающих в режиме ключа и импульсного трансформатора, вместе образующих схему ВЧ преобразователя. Что касается схемного решения, то здесь возможны два варианта преобразователей: первый – выполняется по схеме импульсного автогенератора и второй – с внешним управлением (используется в большинстве современных радиоэлектронных устройств). Поскольку частота преобразователя обычно выбирается в среднем от 20 до 50 килогерц, то размеры импульсного трансформатора, а, следовательно, и всего блока питания достаточно минимизируются, что является очень важным фактором для современной аппаратуры. Упрощенная схема импульсного преобразователя с внешним управлением смотрите ниже: 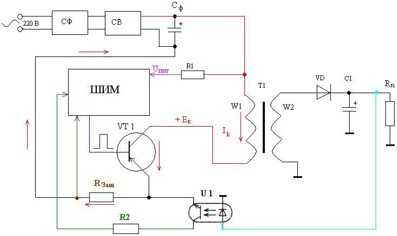 Преобразователь выполнен на транзисторе VT1 и трансформаторе Т1. Сетевое напряжение через сетевой фильтр (СФ) подается на сетевой выпрямитель (СВ), где оно выпрямляется, фильтруется конденсатором фильтра Сф и через обмотку W1 трансформатора Т1 подается на коллектор транзистора VT1. При подаче в цепь базы транзистора прямоугольного импульса, транзистор открывается и через него протекает нарастающий ток Iк. Этот же ток будет протекать и через обмотку W1 трансформатора Т1, что приведет к тому, что в сердечнике трансформатора увеличивается магнитный поток, при этом во вторичной обмотке W2 трансформатора наводится ЭДС самоиндукции. В конечном итоге на выходе диода VD появиться положительное напряжение. При этом если мы будем увеличивать длительность импульса приложенного к базе транзистора VT1, во вторичной цепи будет увеличиваться напряжение, т.к энергии будет отдаваться больше, а если уменьшать длительность, соответственно напряжение будет уменьшаться. Таким образом, изменяя длительность импульса в цепи базы транзистора, мы можем изменять выходные напряжения вторичной обмотки Т1, а следовательно осуществлять стабилизацию выходных напряжений БП. Преобразователь выполнен на транзисторе VT1 и трансформаторе Т1. Сетевое напряжение через сетевой фильтр (СФ) подается на сетевой выпрямитель (СВ), где оно выпрямляется, фильтруется конденсатором фильтра Сф и через обмотку W1 трансформатора Т1 подается на коллектор транзистора VT1. При подаче в цепь базы транзистора прямоугольного импульса, транзистор открывается и через него протекает нарастающий ток Iк. Этот же ток будет протекать и через обмотку W1 трансформатора Т1, что приведет к тому, что в сердечнике трансформатора увеличивается магнитный поток, при этом во вторичной обмотке W2 трансформатора наводится ЭДС самоиндукции. В конечном итоге на выходе диода VD появиться положительное напряжение. При этом если мы будем увеличивать длительность импульса приложенного к базе транзистора VT1, во вторичной цепи будет увеличиваться напряжение, т.к энергии будет отдаваться больше, а если уменьшать длительность, соответственно напряжение будет уменьшаться. Таким образом, изменяя длительность импульса в цепи базы транзистора, мы можем изменять выходные напряжения вторичной обмотки Т1, а следовательно осуществлять стабилизацию выходных напряжений БП.Единственное что для этого необходимо — схема, которая будет формировать импульсы запуска и управлять их длительность (широтой). В качестве такой схемы используется ШИМ контроллер. ШИМ – это широтно-импульсная модуляция. В состав ШИМ контроллера входит задающий генератор импульсов (определяющий частоту работы преобразователя), схемы защиты, контроля и логическая схема, которая и управляет длительностью импульса. Для стабилизации выходных напряжений ИБП, схема ШИМ контроллера «должна знать» величину выходных напряжений. Для этих целей используется цепь слежения (или цепь обратной связи), выполненная на оптопаре U1 и резисторе R2. Увеличение напряжения во вторичной цепи трансформатора T1 приведет к увеличению интенсивности излучения светодиода, а следовательно уменьшению сопротивления перехода фототранзистора (входящих в состав оптопары U1). Что в свою очередь, приведет к увеличению падения напряжения на резисторе R2, который включен последовательно фототранзистору и уменьшению напряжения на выводе 1 ШИМ контроллера. Уменьшение напряжения заставляет логическую схему, входящую в состав ШИМ контроллера, увеличивать длительность импульса до тех пор, пока напряжение на 1-м выводе не будет соответствовать заданным параметрам. При уменьшении напряжения – процесс обратный. В ИБП используются 2 принципа реализации цепей слежения – «непосредственный» и «косвенный». Выше описанный способ называется «непосредственный», так как напряжение обратной связи снимается непосредственно с вторичного выпрямителя. При «косвенном» слежении напряжение обратной связи снимается с дополнительной обмотки импульсного трансформатора: 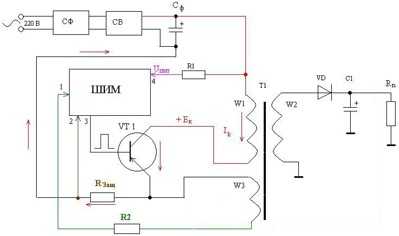 Уменьшение или увеличение напряжения на обмотке W2, приведет к изменению напряжения и на обмотке W3, которое через резистор R2 также приложено к выводу 1 ШИМ контроллера. Уменьшение или увеличение напряжения на обмотке W2, приведет к изменению напряжения и на обмотке W3, которое через резистор R2 также приложено к выводу 1 ШИМ контроллера.С цепью слежения я думаю, разобрались, теперь давайте рассмотрим такую ситуацию как короткое замыкание (КЗ) в нагрузке ИБП. В этом случае вся энергия, отдаваемая во вторичную цепь ИБП, будет теряться и напряжение на выходе будет практически равно нулю. Соответственно схема ШИМ контроллера будет пытаться увеличить длительность импульса для того, что бы поднять уровень этого напряжения до соответствующего значения. В итоге транзистор VT1 будет все дольше и дольше находиться в открытом состоянии, и через него будет увеличиваться протекающий ток. В конце концов, это приведет к выходу из строя этого транзистора. В ИБП предусмотрена защита транзистора преобразователя от перегрузок по току в таких нештатных ситуациях. Основу ее составляет резистор Rзащ, включенный последовательно в цепь, по которой протекает ток коллектора Iк. Увеличение тока Iк протекающего через транзистор VT1, приведет к увеличению падения напряжения на этом резисторе, а, следовательно, напряжение, подаваемое на вывод 2 ШИМ контроллера также будет уменьшаться. Когда это напряжение снизится до определенного уровня, который соответствует максимально допустимому току транзистора, логическая схема ШИМ контроллера прекратит формирование импульсов на выводе 3 и блок питания перейдет в режим защиты или другими словами отключится. В заключении темы хотелось бы более подробно описать преимущества ИБП. Как уже упоминалось, частота импульсного преобразователя достаточно высока, в связи с чем, габаритные размеры импульсного трансформатора уменьшены, а значит, как это не парадоксально звучит, стоимость ИБП меньше традиционного БП, так как меньше расход металла на магнитопровод и меди на обмотки, даже не смотря на то, что количество деталей в ИБП увеличивается. Еще одним из достоинств ИБП является малая, по сравнению с обычным БП, емкость конденсатора фильтра вторичного выпрямителя. Уменьшение емкости стало возможным за счет увеличения частоты. И, наконец, КПД импульсного блока питания доходит до 85 %. Связано это с тем, что ИБП потребляет энергию электрической сети только во время открытого транзистора преобразователя, при его закрытии энергия в нагрузку отдается за счет разряда конденсатора фильтра вторичной цепи. К минусам можно отнести усложнение схемы ИБП и увеличение импульсных помех излучаемым самим ИБП. Увеличение помех связано с тем, что транзистор преобразователя работает в ключевом режиме. В таком режиме транзистор является источником импульсных помех, возникающих в моменты переходных процессов транзистора. Это является недостатком любого транзистора работающего в ключевом режиме. Но если транзистор работает с малыми напряжениями (например, транзисторная логика с напряжением в 5 вольт) это не страшно, в нашем же случае напряжение, приложенное к коллектору транзистора, составляет, примерно 315 вольт. Для борьбы с этими помехами в ИБП используются более сложные схемы сетевых фильтров, чем в обычном БП. |
radiohome.ru
Простой блок питания с обратной связью. Как сделать импульсный блок питания своими руками. Ограничения по мощности.
В статье речь об импульсных блоках питания (далее ИБП), которые сегодня получили самое широкое применение во всех современных радиоэлектронных устройствах и самоделках.Основной принцип заложенный в основу работы ИБП заключается в преобразовании сетевого переменного напряжения (50 Герц) в переменное высокочастотное напряжение прямоугольной формы, которое трансформируется до требуемых значений, выпрямляется и фильтруется.
Преобразование осуществляется с помощью мощных транзисторов, работающих в режиме ключа и импульсного трансформатора, вместе образующих схему ВЧ преобразователя. Что касается схемного решения, то здесь возможны два варианта преобразователей: первый — выполняется по схеме импульсного автогенератора и второй — с внешним управлением (используется в большинстве современных радиоэлектронных устройств).
Поскольку частота преобразователя обычно выбирается в среднем от 20 до 50 килогерц, то размеры импульсного трансформатора, а, следовательно, и всего блока питания достаточно минимизируются, что является очень важным фактором для современной аппаратуры.
Упрощенная схема импульсного преобразователя с внешним управлением смотрите ниже:
Преобразователь выполнен на транзисторе VT1 и трансформаторе Т1. Сетевое напряжение через сетевой фильтр (СФ) подается на сетевой выпрямитель (СВ), где оно выпрямляется, фильтруется конденсатором фильтра Сф и через обмотку W1 трансформатора Т1 подается на коллектор транзистора VT1. При подаче в цепь базы транзистора прямоугольного импульса, транзистор открывается и через него протекает нарастающий ток Iк. Этот же ток будет протекать и через обмотку W1 трансформатора Т1, что приведет к тому, что в сердечнике трансформатора увеличивается магнитный поток, при этом во вторичной обмотке W2 трансформатора наводится ЭДС самоиндукции. В конечном итоге на выходе диода VD появиться положительное напряжение. При этом если мы будем увеличивать длительность импульса приложенного к базе транзистора VT1, во вторичной цепи будет увеличиваться напряжение, т.к энергии будет отдаваться больше, а если уменьшать длительность, соответственно напряжение будет уменьшаться. Таким образом, изменяя длительность импульса в цепи базы транзистора, мы можем изменять выходные напряжения вторичной обмотки Т1, а следовательно осуществлять стабилизацию выходных напряжений БП. Единственное что для этого необходимо — схема, которая будет формировать импульсы запуска и управлять их длительность (широтой). В качестве такой схемы используется ШИМ контроллер. ШИМ — это широтно-импульсная модуляция. В состав ШИМ контроллера входит задающий генератор импульсов (определяющий частоту работы преобразователя), схемы защиты, контроля и логическая схема, которая и управляет длительностью импульса.
Для стабилизации выходных напряжений ИБП, схема ШИМ контроллера «должна знать» величину выходных напряжений. Для этих целей используется цепь слежения (или цепь обратной связи), выполненная на оптопаре U1 и резисторе R2. Увеличение напряжения во вторичной цепи трансформатора T1 приведет к увеличению интенсивности излучения светодиода, а следовательно уменьшению сопротивления перехода фототранзистора (вход
electricianprof.ru
Регулируемый источник питания из БП ATX на TL494. Часть 1 — железо / Habr
Всем привет!Сегодня хотел бы рассказать Вам о своём опыте переделки самого обычного китайского БП ATX в регулируемый источник питания со стабилизацией тока и напряжения(0-20А, 0-24В).
В этой статье мы подробно рассмотрим работу ШИМ контроллера TL494, обратной связи и пробежимся по модернизации схемы БП и разработке самодельной платы усилителей ошибок по напряжению и току.

Честно признаться, сейчас я даже не могу назвать модель подопытного БП. Какой-то из многочисленных дешевых 300W P4 ready. Надеюсь, не нужно напоминать, что на деле эти 300W означают не больше 150, и то с появлением в квартире запаха жареного.
Рассчитываю на то, что мой опыт сможет быть кому-то полезен с практической точки зрения, а потому упор сделаю на теорию. Без нее всё равно не получится переделать БП т.к. в любом случае будут какие-то отличия в схеме и сложности при наладке.
Схема БП ATX
Для начала пройдемся по схеме БП ATX на контроллере TL494(и его многочисленных клонах).
Все схемы очень похожи друг на друга. Гугл выдает их довольно много и кажется я нашел почти соответствующую моему экземпляру.
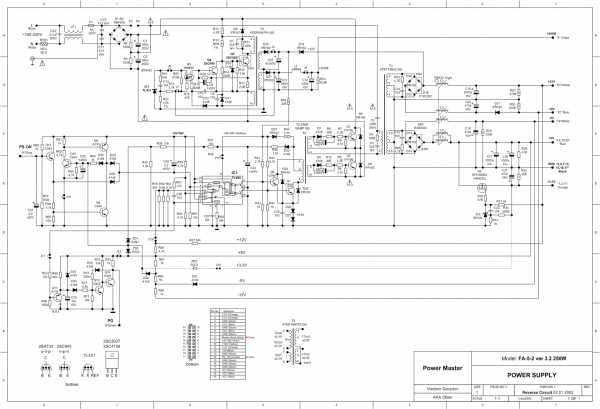
Ссылка на схему в полном размере
Структурно разделим БП на следующие блоки:
— выпрямитель сетевого напряжения с фильтром
— источник дежурного питания(+5V standby)
— основной источник питания(+12V,-12V,+3.3V,+5V,-5V)
— схема контроля основных напряжений, генерация сигнала PowerGood и защита от КЗ
Выпрямитель с фильтрами это всё что в левом верхнем углу схемы до диодов D1-D4.
Источник дежурного питания собран на трансформаторе Т3 и транзисторах Q3 Q4. Стабилизация построена на обратной связи через опторазвязку U1 и источнике опорного напряжения TL431. Подробно рассматривать работу этой части я не буду т.к. знаю, что слишком длинные статьи читать не очень весело. В конце я дам название книги, где подробно рассмотрены все подробности.
Обратите внимание, в схеме по ошибке и ШИМ контроллер TL494 и ИОН дежурного питания TL431 обозначены как IC1. В дальнейшем я буду упоминать IC1 имея ввиду именно ШИМ контроллер.
Основной источник питания собран на трансформаторе Т1, высоковольтных ключах Q1 Q2, управляющем трансформаторе Т2 и низковольтных ключах Q6 Q7. Всё это дело раскачивается и управляется микросхемой ШИМ контроллера IC1. Понимание принципа работы контроллера и назначения каждого элемента его обвязки — это как раз то, что необходимо для сознательной доработки БП вместо слепого повторения чужих рекомендаций и схем.
Механизм работы примерно таков: ШИМ контроллер, поочередно открывая низковольтные ключи Q6 Q7, создает ЭДС в первичной обмотке трансформатора Т2. Видите, эти ключи питаются низким напряжением от дежурного источника питания? Найдите на схеме R46 и поймете о чем я. ШИМ контроллер также питается от этого дежурного напряжения. Чуть выше я назвал трансформатор Т2 управляющим, но кажется у него есть какое-то более правильное название. Его основная задача — гальваническая развязка низковольтной и высоковольтной части схемы. Вторичные обмотки этого трансформатора управляют высоковольтными ключами Q1 Q2, поочередно открывая их. С помощью такого трюка низковольтный ШИМ контроллер может управлять высоковольтными ключами с соблюдением мер безопасности. Высоковольтные ключи Q1 Q2 в свою очередь раскачивают первичную обмотку трансформатора Т1 и на его вторичных обмотках возникают интересующие нас основные напряжения. Высоковольтными эти ключи называются потому, что коммутируют они выпрямленное сетевое напряжение, а это порядка 300В! Напряжение со вторичных обмоток Т1 выпрямляется и фильтруется с помощью LC фильтров.
Теперь, надеюсь, в целом картину вы себе представляете и мы можем идти дальше.
ШИМ контроллер TL494.
Давайте разберемся как же устроен ШИМ контроллер TL494.
Будет лучше, если вы скачаете даташит www.ti.com/lit/ds/symlink/tl494.pdf, но в принципе я постараюсь вынести из него самое главное с помощью картинок. Для более глубокого понимания всех тонкостей советую вот этот документ: www.ti.com/lit/an/slva001e/slva001e.pdf
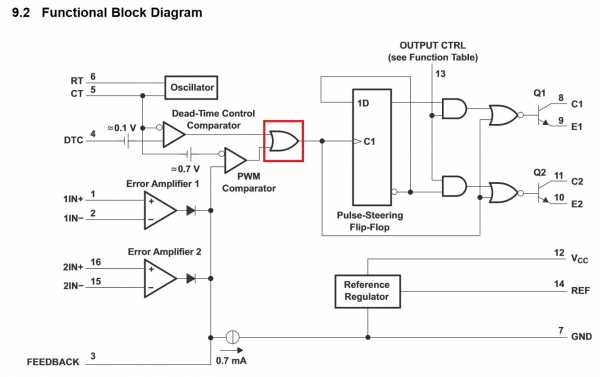
Начнем, как это ни странно, с конца — с выходной части микросхемы.
Сейчас всё внимание на выход элемента ИЛИ (помечен красным квадратом).
Выход этого элемента в конкретный момент времени напрямую управляет состоянием одного или обоих сразу ключей Q1 Q2.
Вариант управления задаётся через пин 13(Output control).
Важная вещь №1: если на выходе элемента ИЛИ лог 1 — выходные ключи закрыты(выключены). Это верно для обоих режимов.
Важная вещь №2: если на выходе элемента ИЛИ лог 0 — один из ключей(или оба сразу) открыт(включен).
Вырисовывается следующая картина: по восходящему фронту открытый ранее транзистор закрывается(в этот момент они оба гарантированно закрыты), триггер меняет своё состояние и по нисходящему фронту включается уже другой ключ и будет оставаться включенным пока снова не придет восходящий фронт и не закроет его, в этот момент опять триггер перещёлкивается и следующий нисходящий фронт откроет уже другой транзистор. В single ended режиме ключи всегда работают синхронно и триггер не используется.
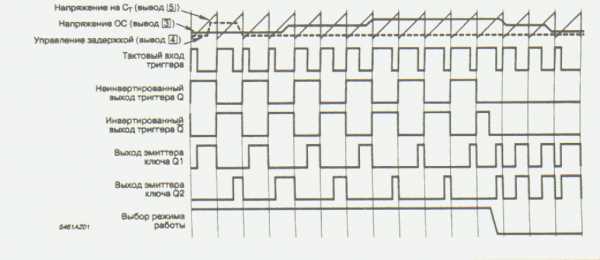
Время, когда выход находится в лог. 1(и оба ключа закрыты) называется Dead time.
Отношение длительности импульса(лог. 0, транзистор открыт) к периоду их следования называется коэффициент заполнения(PWM duty cycle). Например если коэффициент 100% то на выходе элемента ИЛИ всегда 0 и транзистор(или оба) всегда открыт.
Простите, но стараюсь объяснять максимально доступно и почти на пальцах, потому что официальным сухим языком это можно и в даташите прочитать.
Ах да, зачем же нужен Dead time? Если коротко: в реальной жизни верхний ключ будет тянуть наверх(к плюсу) а нижний вниз(к минусу). Если открыть их одновременно — будет короткое замыкание. Это называется сквозной ток и из-за паразитных емкостей, индуктивностей и прочих особенностей такой режим возникает даже если вы будете открывать ключи строго по очереди. Чтобы сквозной ток свести к минимуму нужен dead time.
Теперь обратим внимание на генератор пилы(oscillator), который использует выводы 5 и 6 микросхемы для установки частоты.
На эти выводы подключается резистор и конденсатор. Это и есть тот самый RC генератор о котором наверное многие слышали. Теперь на выводе 5(CT) у нас пила от 0 до 3.3В. Как видим, эта пила подается на инвертирующие входы компараторов Dead-time и PWM.
С терминами и работой выходной части ШИМ контроллера более-менее определились, теперь будем разбираться при чем тут пила и зачем нам все эти компараторы и усилители ошибок. Мы поняли, что отношение длительности импульса к периоду их следования определяет коэффициент заполнения, а значит и выходное напряжение источника питания т.к. в первичную обмотку трансформатора будет вкачиваться тем больше энергии, чем больше коэффициент заполнения.
Для примера разберемся, что нужно сделать чтобы установить коэффициент заполнения 50%. Вы еще помните про пилу? Она подается на инвертирующие входы компараторов PWM и Dead time. Известно, что если напряжение на инвертирующем входе выше чем на неинвертирующем — выход компаратора будет лог.0. Напомню, что пила — это плавно поднимающийся от 0 до 3.3в сигнал, после чего резко падающий на 0в.
Таким образом, чтобы на выходе компаратора 50% времени был лог.0 — на неинвертирующий вход нужно подать половину напряжения пилы(3.3в/2=1,65в). Это и даст искомые 50% duty cycle.
Заметили, что оба компаратора сходятся на том самом элементе ИЛИ, а значит, пока какой-то из компараторов выдает лог.1 — другой не может ему помешать. Т.е. приоритет имеет тот компаратор, который приводит к меньшему коэффициенту заполнения. И если на Dead time компаратор напряжение подается снаружи, то на PWM компаратор можно подать сигнал как извне(3 пин) так и с встроенных усилителей ошибок(это обычные операционные усилители). Они тоже соединяются по схеме ИЛИ, но т.к. мы уже имеем дело с аналоговым сигналом — схема ИЛИ реализуется с использованием диодов. Таким образом контроль над коэффициентом заполнения захватывает тот усилитель ошибки, который просит меньший коэффициент заполнения. Состояние другого при этом не имеет значения.
Обратная связь.
Хорошо, теперь как на всём этом построить источник питания? Очень просто! Нужно охватить БП отрицательной обратной связью. Разница между желаемым(заданным) и имеющимся напряжением называется ошибка. Если в каждый момент времени воздействовать на коэффициент заполнения так, чтобы исправить ошибку и привести ее к 0 — получим стабилизацию выходного напряжения(или тока). Обратная связь является отрицательной до тех пор, пока реагирует на ошибку управляющим воздействием с противоположным знаком. Если обратная связь будет положительной — пиши пропало! В таком случае обратная связь будет увеличивать ошибку вместо того чтобы уменьшать ее.
Всё это работа для тех самых усилителей ошибок. На инвертирующий вход усилителя ошибки подается опорное напряжение(эталон), а на неинвертирующий заводится напряжение на выходе источника питания. Кстати внутри ШИМ контроллера есть источник опорного напряжения 5В, который является точкой отсчёта во всех измерениях.
Компенсация обратной связи
Даже не знаю как бы по-проще это объяснить. С обратной связью всё просто только в идеальном мире. На практике же если вы изменяете коэффициент заполнения — выходное напряжение меняется не сразу, а с некоторой задержкой.
К примеру усилитель ошибки зарегистрировал понижение напряжения на выходе, откорректировал коэффициент заполнения и прекратил вмешиваться в систему, но напряжение продолжает нарастать и потом усилитель ошибки вынужден снова корректировать коэффициент заполнения уже в другую сторону. Такая ситуация происходит из-за задержки реакции. Так система может перейти в режим колебаний. Они бывают затухающими и незатухающими. Блок питания в котором могут возникнуть незатухающие колебания сигнала обратной связи — долго не протянет и является нестабильным.
У обратной связи есть определенная полоса пропускания. Допустим полоса 100кГц. Это означает, что если выходное напряжение будет колебаться с частотой выше 100кГц — обратная связь этого просто не заметит и корректировать ничего не будет. Конечно, хотелось бы, чтобы обратная связь реагировала на изменения любой частоты и выходное напряжение было как можно стабильнее. Т.е. борьба идет за то, чтобы обратная связь была максимально широкополосной. Однако та самая задержка реакции не позволит нам сделать полосу бесконечно широкой. И если полоса пропускания цепи обратной связи будет шире чем возможности самого БП на отработку управляющих сигналов(прямая связь) — на некоторых частотах отрицательная обратная связь будет внезапно становиться положительной и вместо компенсации ошибки будет ее еще больше увеличивать, а это как раз условия возникновения колебаний.
Теперь от задержек в секундах давайте перейдем к частотам, коэффициентам усиления и фазовым сдвигам…
Полоса пропускания это максимальная частота, на которой коэффициент усиления больше 1.
С увеличением частоты коэффициент усиления уменьшается. В принципе это справедливо для любого усилителя.
Итак, чтобы наш БП работал стабильно должно выполняться одно условие: во всей полосе частот, где суммарное усиление прямой и обратной связи больше 1(0дБ), отставание по фазе не должно превышать 310 градусов. 180 градусов вносит инвертирующий вход усилителя ошибки.
Вводом в обратную связь различных фильтров добиваются того, чтобы это правило выполнялось. Если очень грубо, то компенсация обратной связи это подгонка полосы пропускания и ФЧХ обратной связи под реакции реального источника питания(под характеристики прямой связи).
Тема эта очень не простая, под ней лежит куча математики, исследований и прочих трудов… Я лишь стараюсь в доступном виде изложить саму суть вопроса. Могу порекомендовать к прочтению вот эту статью, где хоть и не так на пальцах, но тоже в доступном виде освещен этот вопрос и даны ссылки на литературу: bsvi.ru/kompensaciya-obratnoj-svyazi-v-impulsnyx-istochnikax-pitaniya-chast-1
От теории к практике
Теперь мы можем взглянуть на схему БП и понять что в ней много лишнего. В первую очередь я выпаял всё, что относится к контролю выходных напряжений(схема формирования сигнала Power good). Нейтрализовал встроенные в ШИМ контроллер усилители ошибок путем подачи +5vref на инвертирующие входы и посадив на GND неинвертирующие. Удалил штатную схему защиты от КЗ. Выпилил все не нужные выходные фильтры от напряжений которые не используются… Заменил выходные диоды на более мощные. Заменил трансформатор! Выпаял его из качественного БП где написанные 400W действительно означают 400W. Разница в размерах между тем, что стояло тут до этого говорит сама за себя:

Заменил дроссели в выходном фильтре(с того-же 400W БП) и конденсаторы поставил на 25В:

Далее я разработал схему, позволяющую регулировать стабилизацию выходного напряжения и устанавливать ограничение тока выдаваемого БП.
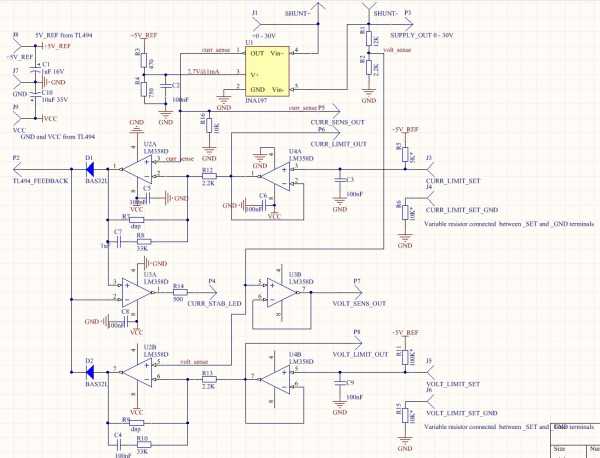
Схема реализует внешние усилители ошибок собранные на операционных усилителях LM358 и несколько дополнительных функций в виде усилителя шунта(INA197) для измерения тока, нескольких буферных усилителей для выдачи величины установленного и измеренного тока и напряжения на другую плату, где собрана цифровая индикация. О ней я расскажу в следующей статье. Выдавать на другую плату сигналы как есть — не лучшее решение т.к. источник сигнала может быть достаточно высокоомным, провод ловит шум, мешая обратной связи работать устойчиво. В первой итерации я с этим столкнулся и пришлось всё переделать. В принципе на схеме всё подписано, подробно комментировать ее не вижу смысла и думаю, что для тех кто понял теорию выше, должно быть всё довольно очевидно.
Отмечу лишь, что цепочки C4R10 и C7R8 это и есть компенсация обратной связи о которой я говорил выше. Честно говоря, в ее настройке очень помогла прекрасная статьи эмбэддера под ником BSVi. bsvi.ru/kompensaciya-obratnoj-svyazi-prakticheskij-podxod Этот подход реально работает и потратив денек-другой мне удалось добиться стабильной работы БП описанным в статье методом. Сейчас, конечно, я бы справился часа за два наверно, но тогда опыта не было и по неосторожности я взорвал не мало транзисторов.
Ах да, обратите внимание на емкость C7! 1uF это довольно много. Сделано это для того, чтобы обратную связь по току зажать в быстродействии. Это такой грязный хак для преодоления нестабильности возникающей на границе перехода от стабилизации напряжения к стабилизации тока. В таких случаях применяют какие-то более навороченные приёмы, но так заморачиваться я не стал. Супер точная стабилизация тока мне не нужна, к тому же к моменту, когда я столкнулся с этой бедой — проект переделки БП успел здорово надоесть!
По этой схеме лазерным утюгом была изготовлена плата:
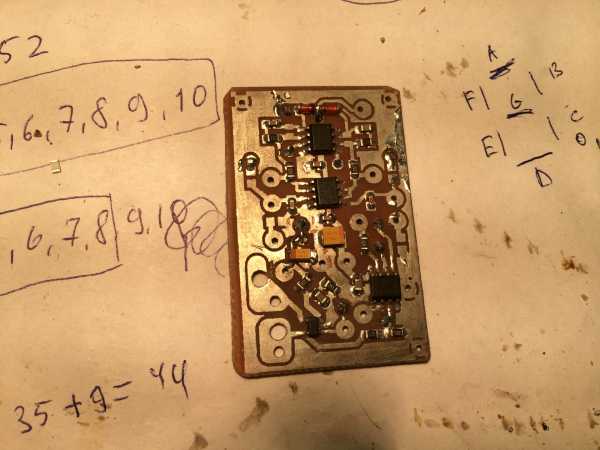
Она встраивается в БП вот таким образом:

В качестве шунта для измерения тока выбран кусок медной проволоки длинной сантиметров 10 наверно.
Корпус я использовал от довольно качественного БП Hiper. Кажется это самый проветриваемый корпус из всех что я видел.
Также возник вопрос о подключении вентилятора. БП ведь регулируется от 0 до 24В, а значит кулер придется питать от дежурки. Дежурка представлена двумя напряжениями — стабильными 5В, которые идут на материнскую плату и не стабилизированным, служебным питанием около 13.5В которое используется для питания самого ШИМ контроллера и для раскачки управляющего трансформатора. Я использовал обычный линейный стабилизатор чтобы получить стабильные +12В и завёл их на маленькую платку терморегуляции оборотов кулера, выпаянную с того-же Hiper’a. Платку закрепил на радиаторе шурупом просто из соображений удобства подключения кулера.

Радиаторы кстати пришлось изогнуть ибо они не вмещались в корпус нового формата. Лучше перед изгибанием их нагревать паяльной станцией, иначе есть шанс отломать половину зубов. Терморезистор регулятора закрепил на дросселе групповой стабилизации т.к. это самая горячая часть.
В таком виде БП прошел длительные испытания, питая кучу автомобильных лампочек дальнего света и выдерживал нагрузки током порядка 20А при напряжении 14В. А еще он гордо зарядил несколько автомобильных аккумуляторов, когда у нас в Крыму выключали свет.
Будущее уже рядом
Тем временем я задумал немного нестандартную систему индикации режимов работы БП, о чем в последствии немного сожалел, но всё-же она работает!

Так что в следующей статье вас ждет программирование ATMega8 на C++ с применением шаблонной магии, различных паттернов и самописная библиотека для вычислений с фиксированной точкой поверх которой реализовано усреднение отсчётов АЦП и перевод их в напряжение/ток по таблице с линейной интерполяцией. Каким-то чудом всё это уместилось в 5 с копейками килобайт флэша.
Не переключайте канал, должно быть интересно.
Кстати, обещанная в начале книга:
Куличков А.В. «Импульсные блоки питания для IBM PC»
radioportal-pro.ru/_ld/0/15_caf3ebe8f7eaeee.djvu
P.S. Надеюсь, изложенное выше окажется полезным. Строго не судите, но конструктивная критика приветствуется.
Added для RO пользователей которые не могут писать комментарии: email: altersoft_пёс_mail.ру
habr.com
Страничка эмбеддера » Компенсация обратной связи в импульсных источниках питания часть 1.
Сегодня я хотел бы рассказать об одном из сложных вопросов электроники — компенсации обратной связи применительно к импульсным источникам питания (ИИП). 
Вопрос этот действительно сложен. О нем написаны толстенные талмуды (предмет называется ТАУ), требующие некислого знания математики. Я попробую без привлечения сложной математики, объяснить что значат все эти полюсы и нули и как заставить ваш источник питания работать стабильно.
Эта статья – одна из самых сложных на этом сайте, и врядле хорошо пойдет с пивком.
Для чего нужна компенсация?
Сердцем любого источника питания является цепь обратной связи. Она должна поддерживать выходное напряжение на постоянном уровне. Для этого используется так называемый усилитель ошибки — он минимизирует рассогласование между опорным напряжением и выходным напряжением источника питания.
Естественно, на практике все оказывается не так ажурно. В любой системе есть задержки. Если задержка распространения сигнала оказывается сильно большой, то получается очень неприятная ситуация, к примеру:
Контроллер «видит», что на выходе источника слишком маленькое напряжение и начинает его повышать. Когда контроллер узнает, что напряжение достигло номинала, он отключается, однако напряжение продолжает нарастать — ведь в схеме есть задержка. Контроллер пытается скомпенсировать это нарастание и уменьшает напряжение. Однако, из-за задержки, напряжение опять падает ниже номинала.
Таким образом, наша отрицательная обратная связь превращается в положительную. На выходе нашего ИИП появляются колебания напряжения. Эти колебания бывают затухающие и незатухающие. Блоки питания в которых могут возникнуть незатухающие колебания называют нестабильными.
Наша задача получить затухающие колебания как можно меньшей амплитуды и продолжительности.
Обратная связь в импульсных блоках питания широкополносна — чем шире диапазон частот в котором работает наша обратная связь, тем меньше пульсаций на выходе.
Диаграмма Боде
Оказалось, что очень удобно представлять задержки и усиление в разных цепях с помощью так называемой диаграммы Боде. Она состоит из двх графиков — графика амплитудно-частотной характеристики (АЧХ ) и графика фазо-частотной характеристики (ФЧХ). На обоих частота откладывается в логарифмическом масштабе (1…10…100…1000). На амплитудном графике в логарифмическом масштабе (в дицибелах) откладывается коэфициент усиления. На фазовом графике откладывается задержка в градусах.
Теперь я буду говорить много умных слов. Чтобы вам было понятно, опишу некоторые из них —
- Децибел (дБ) – про него и так много написано. Можно воспринимать просто как единицу измерения с хитрым свойством – когда сигналы умножаются, их децибельные представления суммируются.
Декада – изменение частоты в 10 раз. К примеру, выше на две декады – это значит, что частота увеличилась в 100 раз.
Октава – изменение частоты в 2 раза.
Передаточная характеристика – отношение выходного сигнала ко входному
Да, задержку в источниках питания измеряют в градусах. В градусах относительно той частоты на которой измеряется задержка.
Пример диаграммы боде для простых случаев: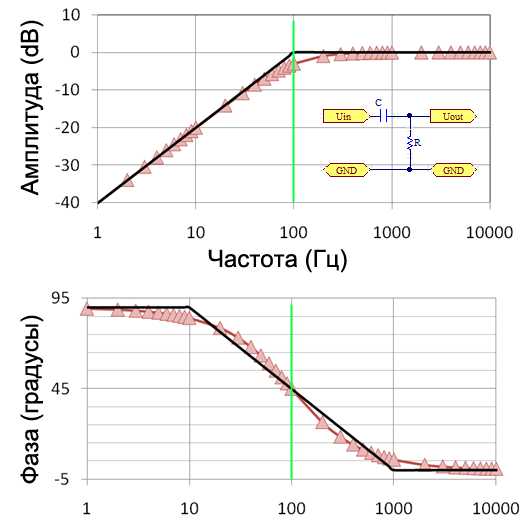
Итак, тут мы видим фильтр высоких частот.
На верхнем графике показана передаточная характеристика этой цепочки (амплитудная характеристика). Красная линия – это настоящая передаточная характеристика, а черная– ее линейная аппроксимация. Такие линейные аппроксимации очень удобно использовать на практике и дальше мы будем использовать только их. Наклон этой красной линии — +20дБ/дек (при каждом увеличении частоты в 10 раз, коэффициент передачи цепочки увеличивается на 20дБ). Зеленой линией обозначена критическая частота. Для RC цепочки такая частота всегда равна
На нижнем графике изображена ФЧХ этого фильтра. Так-же как и на верхнем, красная линия – настоящая, черная– аппроксимация. Для RC цепочки характерно, что излом фазовой характеристики начинается на декаду раньше критической частоты. На критической частоте достигает 45 градусов, а на декаду выше критической частоты, фазовая характеристика становится постоянной. Суммарное изменение фазы составляет +90 градусов.
Из-за характерного вида математического выражения передаточной функции в (!!внимание, маты!!) s-плоскости, такой излом назвали нулем передаточной функции. Это непонятное слово можно очень часто встретить в литературе посвященной обратной связи. Мы тоже будем его часто использовать.
Разберемся с противоположным примером:
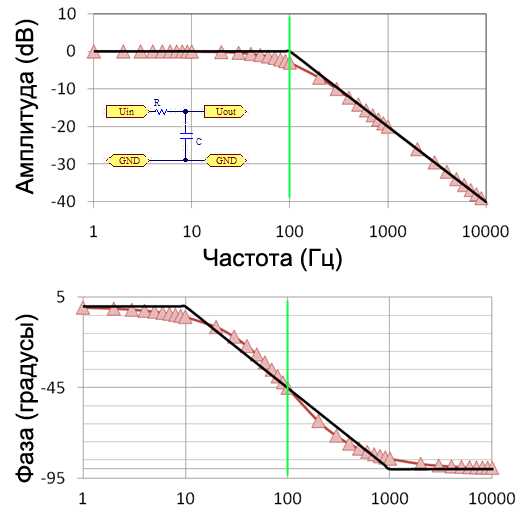
Тут мы видим фильтр низких частот. Все точно так-же, как и для ФВЧ, только наклон амплитудной характеристики –20дБ/дек, а фаза изменяется на –90 градусов. Такой излом называют полюсом передаточной функции.
Для того, чтобы быть совсем уж справедливым, покажу еще LC фильтр, который очень часто стоит на выходе ИИП:
Тут все сложнее, но не намного. Во-первых, наклон амплитудной характеристики –40дБ/дек, во-вторых, фаза измениется уже на 180 градусов. Такая цепочка обладает двуполюсной передаточной характеристикой (да-да, она как два RC фильтра и скорость падения усиления в два раза больше – уловили закономерность?).
Еще такая цепочка обладает резонансным “горбом”. На практике (в источниках питания) он небольшой, поэтому на него смело забивают и аппроксимируют прямыми линиями.
Точно такие-же характеристики и у соответствующих активных фильтров.
Критерий устойчивости.
Теперь, когда мы знаем, что такое диаграмма боде, мы готовы узнать что нужно сделать, чтобы блок питания не подсвистывал.
Все очень просто. Во всей полосе частот, где суммарное усиление прямой и обратной связи больше 0дБ (1 раз), отставание по фазе не должно превышать 310 градусов. (180 градусов вносит инвертирующий вход усилителя ошибки).
В реальной жизни АЧХ и ФЧХ однозначно связанны так называемым (!!внимание, маты!!) преобразованием Гильберта. Это дает нам возможность вывести очень простое правило (ради него по сути вы и читали весь предыдущий бред):
Скорость спада АЧХ разомкнутого контура обратной связи должны быть 20дБ/дек во всей полосе, где коэффициент передачи обратной связи больше 0дб.
В принципе, это правило не точно, системы со спадом в 40дБ/дек могут быть устойчивы. А вот системы со спадом в 60дб/дек более всегда неустойчивы. Но мы рисковать не будем, будем подчиняться правилу.
Нули точно противоположны полюсам. Тоесть если поставить нуль где-то около полюса то они компенсируются. Верно и обратное – полюс компенсирует нуль. Компенсирующие нули или полюса можно поставить немного раньше или немного позже компенсируемых. Главное, чтобы фаза не успела зайти в диапазон нестабильности.
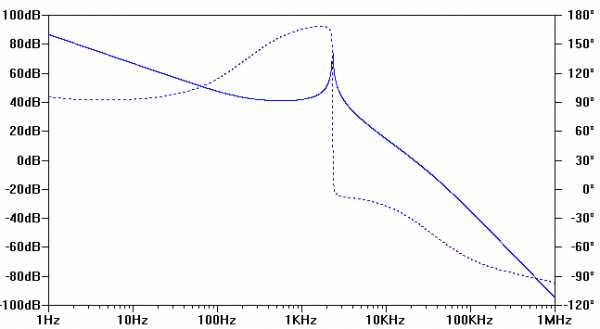
Рассмотрим, к примеру, простую, но нестабильную схему
Диаграмма Боде от входа обратной связи (ножка 2) до напряжения на конденсаторе при разомкнутой петле обратной связи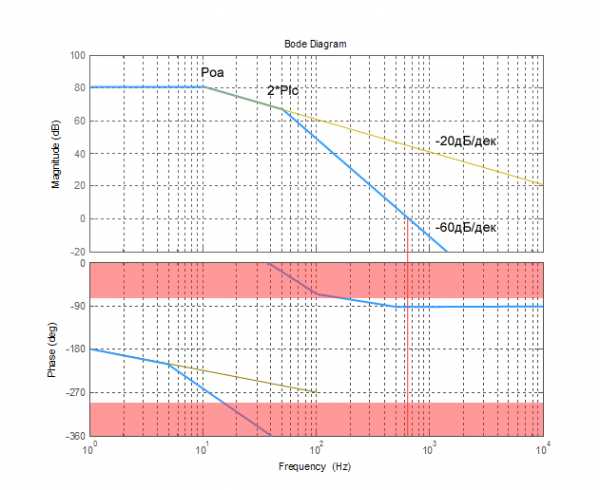
На графике АЧХ, 80дБ – это усиление ОУ с открытой петлей. Сначала сказывается внутренний полюс ОУ (пусть, он будет на 10гц) и усиление спадает со скоростью 20дБ/дек. Если бы не полюса LC-фильтра то усиление продолжило бы спадать как показано желтой линией. Однако в игру входит фильтр настроенный на 50Гц и скорость спада усиления составляет уже 60дБ/дек. Усиление достигает 0 дБ в точке 650Гц
Теперь разберемся с ФЧХ. Инвертирующий вход операционника добавляет 180 градусов к фазе. И дальше фаза изменяется как и положено фазе однополюсной передаточной функции. Однако появляется LC фильтр и портит всю малину. Фаза теперь очень быстро доходит до –450 градусов (-180 от LC и –90 от операционника –180 от инвертирующего входа). Как вы наверняка знаете, 360 градусов для периодической функции это все-равно, что 0 градусов. Поэтому ФЧХ залазит за 360 и вылазит в нуле.
Красным отмечена зона нестабильности. В этой области отрицательная обратная связь становится положительной. На картинке есть небольшие зазорчики от –90 и –270 градусов до зоны нестабильности. Эти зазорчики называются зоной метастабильности. В этой зоне устройство будет работать, но работать будет криво, и поэтому туда лучше не соваться.
Как видно из графика, наше устройство станет прекрасным генератором где-то в диапазоне от 20 до 100 гц. Наше правило о том, что скорость спада АЧХ должна быть 20 дБ/дек не выполняется.
Эй, хватит трындеть. Давай, застабилизируй что-нибуть!
Для начала давайте стабилизируем предыдущую конструкцию. Не смотря на то, что она довольно простая, она требует довольно серьезного стабилизатора.
Возьмем L = 4.7uH, C = 1000u. ОУ – TL072, к примеру. В реальности такая схема работать не будет – ОУ не потянет такую большую нагрузку, но для примера — сойдет.
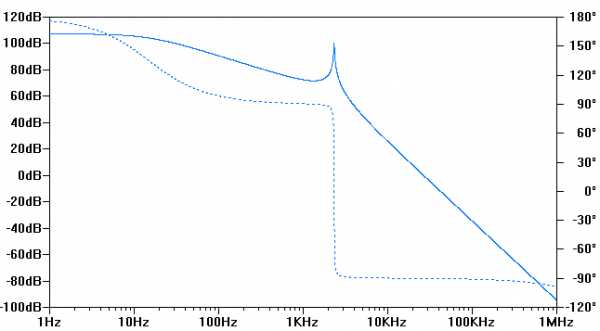
Передаточная характеристика такой схемы содержит три полюса — полюс ОУ на 15Гц и два полюса нашего LC фильтра на 2.32кГц
Диаграмма Боде этой схемы из симулятора:
Нам нужно добиться скорости спада АЧХ 20дБ/дек. Тоесть из трех полюсов которые сейчас есть в системе нужно оставить только один.
Компенсация (кроме совсем примитивных случаев) — процесс творческий. Существует множество компромиссов, на которые придется пойти. Я использую симулятор для того, чтобы “потыкаться” и выбрать лучшее решение.
Итак, компенсируем первый полюс. Для этого в обратную связь операционного усилителя вводим последовательную RC цепочку. Это аналог обычного RC ФВЧ, он дает нуль. R1 пытаемся сделать как можно большим, к примеру, мегаом. R2 пока ставим от балды. С2 выбираем так, чтобы он развернул фазу по максимуму до того, как LC фильтр ее дернет на 180 градусов. Тоесть ставим за декаду до частоты резонанса LC фильтра – на 232Гц.
Симулируем такую цепь, получаем такую АЧХ:
Примерно до 20кГц скорость падения АЧХ стала 40дБ/окт. Дальше у ОУ появляется еще один полюс и скорость падения вновь увеличивается. Это явление происходит вне полосы обратной связи и поэтому нас не интересует.
Осталось скомпенсировать еще полюса. Для этого вводим еще один фильтр. Теперь на вход:

На входе получилась цепочка чем-то напоминающая мост Вина. А на диаграмме Боде появился резонансный выброс.
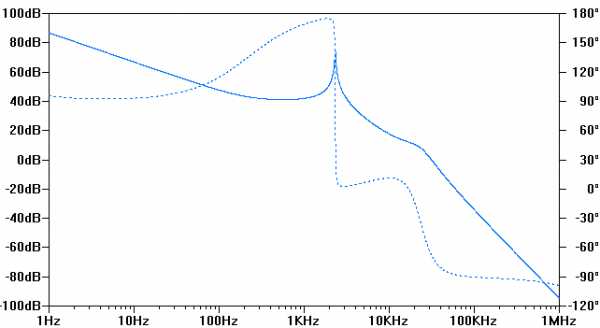
Краешком этого выброса мы “подпираем” спадающую характеристику до 10кГц. Видим, что фаза находится в пределах 180 градусов, что вообщем-то нас устраивает. Система будет слезка звенеть при изменении нагрузки, но зато уже не начнет осциллировать.
Все! петлю обратной связи можно замыкать!
Ну и что нам теперь с этим делать?
Настоящие импульсные источники питания имеют недостаток – проанализировать их не так просто как я сделал это с нашим примером. С другой стороны все импульсные блоки питания уже созданы и обмеряны. Нам останется только подстроить готовые диаграммы Боде конкретной топологии импульсного источника под конкретный случай. Сделать это достаточно просто, если понимать теорию изложенную в этой статье.
Если я пересилю лень, то напишу статью с рецептами приготовления обратных связей к конкретных топологиях ИИП.
Еще почитать
К сожалению, единственный человек, который пытался доступно описать эту тему – Dixon, за что ему огромное спасибо. Похоже он только обратной связью и занимался – других его статей я не видел. Его статьи:
Dixon – Closing The Feedback loop.
Dixon – Control Loop Cookbook
Dixon – Control Loop Design
Конечно-же существует море (хотя не такое уж и море) книг по ТАУ, но сразу хочу предупредить, что читать их нужно не с пивом, а как ландавшица — с водярой.
bsvi.ru
Импульсный блок питания мощностью 200 Вт для УМЗЧ
РадиоКот >Схемы >Питание >Блоки питания >Импульсный блок питания мощностью 200 Вт для УМЗЧ
Здравствуй уважаемый Кот! С днем рождения тебя и всех благ, так сказать! А в качестве подарка прими такую очень полезную вещь, как источник питания для усилка.
ВНИМАНИЕ!
Часть элементов данного устройства находится под опасным для жизни напряжением сети! Некоторые элементы сохраняют опасный электрический заряд после отключения устройства от сети! Поэтому при монтаже, наладке и работе с устройством необходимо соблюдать требования электробезопасности. Повторяя устройство, вы действуете на свой страх и риск. Я, автор, НЕ несу никакой ответственности за любой моральный и материальный ущерб, вред имуществу, здоровью и жизни, причиненный в результате повторения, использования или невозможности использования данной конструкции.
Итак, начнем.
Споры о том, благо ли или зло импульсный источник питания для УМЗЧ (далее ИИП), выходят за рамки данной статьи. Лично я считаю, что правильно спроектированный, спаянный и налаженный ИИП ничуть не хуже (а по некоторым показателям даже лучше), чем классический БП с сетевым трансформатором.
В моем случае применение ИИП было необходимо потому, что я хотел засунуть свой усилок в плоский корпус.
Прежде чем разрабатывать данный ИИП, мной было изучено много готовых схем, имеющихся в сети и в литературе. Так, среди радиолюбителей очень популярны разные варианты схемы нестабилизированного ИИП на микросхеме IR2153. Преимущество этих схем только одно – простота. Что же касается надежности, то она никакая – сама ИМС не имеет функции защиты от перегрузки и мягкого старта для зарядки выходных электролитов, а добавление этих функций лишает ИИП его преимущества – простоты. Кроме того, реализация мягкого старта на данной ИМС крайне сомнительна – ширину импульсов она менять не позволяет, а методы, основанные на изменении частоты работы ИМС малоэффективны в «обычном» полумостовом ИИП и применимы в резонансных преобразователях. Долбать же электролиты и ключи огромными токами при включении блока мне как-то не очень хотелось.
Также рассматривалась возможность использования всем известной ИМС TL494. Однако при более глубоком ее изучении выяснилось, что для надежной работы вокруг этой ИМС придется повесить кучу всяких транзисторов, резисторов, конденсаторов и диодов. А это уже «не наш метод» 🙂
В результате выбор пал на более современную и быструю микросхему под названием UC3825 (русский аналог К1156ЕУ2). Подробное описание данной ИМС можно найти в ее русском даташите [1] и в журнале «Радио» [2].
Для тех, кто поленился прочитать эти источники, скажу, что это быстродействующий ШИМ-контроллер, обладающий следующими возможностями:
- Управление мощными МОП-транзисторами.
- Работа в устройствах с обратной связью по напряжению и току.
- Функционирование на частотах до 1МГц.
- Задержка прохождения сигнала через схему 50нс.
- Полумостовые выходы на ток до 1.5А.
- Широкополосный усилитель ошибки.
- Наличие ШИМ-защелки.
- Ограничение тока в каждом периоде.
- Плавный запуск. Ограничение величины максимальной длительности выходного импульса.
- Защита от пониженного напряжения питания с гистерезисом.
- Выключение схемы по внешнему сигналу.
- Точный источник опорного напряжения (5.1В +/- 1%).
- Корпус “DIP-16”
Ну прям то что надо! Рассмотрим теперь сам ИИП.
Входное напряжение, В…………………………………………….. 176…265;
Номинальная суммарная мощность нагрузки, Вт………………. 217,5;
Уровень сигнала управления, при котором БП включен……… Лог. 1 КМОП;
Уровень сигнала, при котором БП выключен…………………… <0,6 В или NC;
КПД при максимальной нагрузке, %……………………………… 80;
Габариты (ДхШхВ), мм………………………………………………..212х97х45
Выходные напряжения
|
Выходное напряжение, В |
Минимальный ток нагрузки, А |
Максимальный ток нагрузки, А |
|
± 25 |
0,24 |
4 |
|
± 15 |
0 |
0,5 |
|
+ 5 (дежурное) |
0 |
0,5 |
Принципиальная схема
Принципиальная схема ИИП показана на рисунке.
По архитектуре данный БП напоминает ИИП компьютеров формата ATX. Напряжение сети через предохранители FU1 и FU2 подается на сетевой фильтр и трансформатор дежурного питания. Использование двух предохранителей необходимо по соображениям безопасности – с одним общим предохранителем в случае КЗ в обмотке Т1 ток в ее цепи будет недостаточен для пережигания этого предохранителя, а мощность, выделяющаяся на вышедшем из строя трансформаторе достаточна для его возгорания.
Сетевой фильтр содержит двухобмоточный дроссель L1, X-конденсаторы С1, С2 и Y-конденсаторы С3, С4 и особенностей не имеет. Варистор RV1 защищает ИИП от высоковольтных выбросов в сети и при превышении напряжением сети максимально допустимого значения.
NTC-терморезистор RK1 ограничивает ток зарядки конденсатора С5 при включении ИИП в сеть.
Напряжение, выпрямленное мостом VD1 и сглаженное конденсатором С5, поступает на полумостовой инвертор, образованный МОП-транзисторами VT1, VT2 и конденсаторами емкостного делителя С6, С7. Раздельное построение входного фильтра и емкостного делителя позволяет облегчить режим работы оксидного конденсатора фильтра, имеющего сравнительно большое значение ЭПС. Резисторы R5, R6 выравнивают напряжение на конденсаторах делителя.
В диагональ полумоста включен силовой импульсный трансформатор Т4.
Выходные цепи ИИП содержат выпрямители на диодах VD5 – VD8, VD9 – VD12, дроссель групповой стабилизации (ДГС) L3 и П-образные фильтры С11 – C16, L4, L5 и C17 – С22, L6, L7. Керамические конденсаторы С13, С14, С17, С18 облегчают режим работы соответствующих электролитов. Резисторы R11 – R14 создают начальную нагрузку, необходимую для нормальной работы ИИП на холостом ходу.
Цепочки C8, R7; C9, R9; C10, R10 – демпфирующие. Они ограничивают выбросы ЭДС самоиндукции индуктивности рассеяния и снижают создаваемые ИИП помехи.
Схема управления на основной плате не помещалась, поэтому собрана в виде модуля А1 на дополнительной плате.
Как вы наверно уже догадались, ее основой является микросхема DA2 UC3825AN. Питается она от интегрального стабилизатора на КРЕНке DA1. Конденсаторы С1 и С7 – фильтр питания. Они, как гласит ДШ, должны быть расположены максимально близко к соответствующим выводам DA2. Конденсатор С5 и резистор R8 – частотозадающие. При указанных на схеме номиналах частота преобразования БП примерно равна 56 кГц (частота работы ИМС при этом в 2 раза выше – у нас ведь двухтактный ИИП). Конденсатор С4 задает длительность плавного старта, в данном случае – 78 мс. Конденсатор С2 фильтрует помехи на выходе источника опорного напряжения. Элементы С6, R9, R10 – цепь компенсации усилителя ошибки, а R4, R6 – делитель выходного напряжения БП, с которого снимается сигнал обратной связи.
Защита от перегрузки по току реализована на трансформаторе тока Т3. Сигнал с его вторичной обмотки выпрямляется выпрямителем на диодах VD3, VD4 (основной платы). Резистор R8 (на основной плате) является нагрузкой трансформатора тока. Сигнал с R8 через фильтрующую цепочку R7, C3 (в модуле А1) подается на вход ограничения тока DA2. В этом БП реализовано потактовое ограничение тока, т. е. микросхема не дает току через ключи нарасти до опасных значений. При достижении напряжения 1 В на выводе 9 микросхема ограничивает ширину импульсов. Если же в нагрузке произошло КЗ и ток ключей увеличился быстрее, чем DA2 успела среагировать на это, напряжение на выводе 9 превысит 1,4 В. Микросхема разряжает С4 и вырубается. Ток в цепи первичной обмотки пропадает и микросхема перезапускается. Таким образом, при КЗ в нагрузке ИИП переходит в «икающий» режим.
Управление затворами полевых транзисторов реализовано с помощью трансформатора Т2. В настоящее время получило распространение использование всяких бутстрепных высоковольтных драйверов типа IR2110 и т. п. Однако недостатком таких микросхем является то, что при выходе из строя какого-либо элемента выгорает ВСЯ высоковольтная часть БП и гальванически связанные с ней узлы (с чем мне и пришлось столкнуться в процессе экспериментов с данными микросхемами). Кроме того, данные ИМС не обеспечивают гальванической развязки схемы управления от высоковольтной части, что при выбранной архитектуре недопустимо. Про особенности управления затворами можно прочитать в [3], а в [4] можно скачать программу для расчета трансформатора управления.
Диоды Шотки VD1 – VD4 в модуле А1 защищают выходы драйвера микросхемы управления. Этому также способствует резистор R11.
На элементах VT1, VT2, R1 – R5 собрана схема выключения ИИП. Смысл всего этого – коротить С4, переводя тем самым микросхему управления в ждущий режим. Такие навороты нужны для гарантированного выключения ИИП даже если вход выключения вдруг повис в воздухе (сгорел проц в блоке управления, оборвался провод) или же вышел из строя источник дежурного питания. Иными словами, работа DA2 будет заблокирована до тех пор, пока на нее подано питание и при этом на вход управления ИИП не подан уровень лог. 1.
В ИИП имеется дежурный источник питания, который может использоваться для питания блока управления усилителем с функцией дистанционного включения.
Основа дежурного источника питания – трансформатор Т1. Применение «обычного», 50-герцового трансформатора повышает надежность устройства по сравнению с получившими широкое распространение в компьютерных БП импульсными обратноходовыми преобразователями, которые очень часто дохнут, создавая различные пиротехнические эффекты. Все-таки дежурка предполагает круглосуточную работу. Выпрямленное мостом VD2 и сглаженное конденсатором С23 напряжение (около 15 В) поступает модуль А1 и на Step-Down (понижающий) импульсный преобразователь на всем известной МС34063 (русский аналог К1156ЕУ5АР). Про эту микруху можно почитать в ДШ [5]. Кто-то скажет, а зачем такие сложности? Чем не угодила КРЕНка? Дело в том, что для нормальной работы UC3825 нужно минимум 12 В во всем допустимом диапазоне напряжений сети. При максимальном же напряжении в сети (мы ведь должны учесть всё) на выходе моста VD2 может быть аж 18-20 В. При этом если ваш микропроцессорный блок потребляет больше 50 мА, КРЕНка превратится в большую печку.
Супрессор VD14 защищает нагрузку дежурки (ваш мегасложный и супернавороченный микроконтроллерный блок управления) в случае выхода из строя источника дежурного питания (например, при пробое ключа МС34063 на ее выходе могут оказаться все 15 В).
Поскольку я не люблю «соплей», а данное устройство любит правильную разводку, ИИП собран на односторонней печатной плате, рисунок которой приведен ниже:
На основной плате установлены две перемычки из провода МГТФ — J1 со стороны деталей и J2 — со стороны дорожек.
Как уже отмечалось выше, схема управления не поместилась на основной плате и поэтому собрана на вспомогательной плате:
Применение SMD-элементов здесь вызвано не столько желанием сделать ультрамаленький модуль и усложнить задачу покупки элементов радиолюбителям из отдаленных от г. Москва регионов, сколько требованиями по разводке высокочастотных цепей вокруг UC3825. Благодаря использованию SMD-элементов удалось сделать все печатные проводники минимальной длины. Кто хочет, может попробовать красиво нарисовать платку под обычные детальки – у меня не получилось =))
Замечу также, что сильно отклоняться от приведенной разводки платы я настоятельно не рекомендую, т. к. БП может либо начать «гадить» в эфир, либо вообще не будет работать.
Теперь о деталях. Многие из них можно вытащить из неисправных или устаревших компьютерных БП. Основная плата рассчитана на установку резисторов С2-23 (МЛТ, ОМЛТ и т. п.), резисторы R10, R13 и R14 импортные (они тоньше МЛТ). Керамические конденсаторы – К10-17Б или аналогичные импортные, С25 должен быть обязательно из диэлектрика NPO или аналогичного, С6, С7 – пленочные К73-17.
Помехоподавляющие конденсаторы С1, С2 должны быть категории Х2, а С3 и С4 – Y2. К последним это требование обязательно, т. к. от них зависит электробезопасность ИИП. Конденсаторы С8 – С10 – керамические дисковые высоковольтные импортные. Можно поставить К15-5, но они больше, придется подправить плату.
Все оксидные конденсаторы должны быть с низким эквивалентным последовательным сопротивлением (Low ESR). Подойдут конденсаторы Jamicon серии WL. В качестве С5 подойдет Jamicon HS.
Дроссель L1 – от компового БП, выдранный из аналогичного места. На моем было написано “YX EE-25-02”. Дроссели L2, L4, L5 – стандартные на гантельках диаметром 9 мм, например, серии RLB0914. Дроссель L2 должен быть рассчитан на ток не менее 0,8А, L4, L5 – не менее 0,5 А. Дроссели L6 и L7 намотаны на кольцах T72 (К18,3х7,11х6,60) из распыленного железа марки -26 (желто-белого цвета). Я использовал уже готовые, поэтому сколько там витков не знаю, но при желании число витков можно рассчитать в программе «DrosselRing» [6]. Измеренная индуктивность моих дросселей 287 мкГн.
Транзисторы VT1, VT2 – n-канальные MOSFET с напряжением сток-исток не менее 500 В и током стока не менее 8 А. Следует выбирать транзисторы с минимальным сопротивлением открытого канала (Rds_on) и минимальным зарядом затвора.
Мост VD1 – любой на 800-1000 В, 6А, VD2 – любой >50В, 1А. В качестве VD3, VD4 подойдут КД522. Диоды VD5 – VD8 – Шоттки на напряжение не менее 80 В и ток не менее 1 А, VD9 – VD12 – быстродействующие (ultrafast) на напряжение не менее 200 В, ток 10…15 А и временем обратного восстановления не более 35 нс (в крайнем случае 75…50 нс). Будет совсем шикарно, если найдете Шоттки на такое напряжение. Диод VD13 – любой Шоттки 40 В, 1А.
В модуле А1 применены SMD-резисторы и конденсаторы типоразмера 0805. На позиции J1 устанавливается перемычка 0805. С5 должен быть обязательно из диэлектрика NPO или аналогичного, С6 – не хуже X7R. С1 – танталовый типа С или D – площадки на плате рассчитаны на любой из них. Транзисторы VT1, VT2 – любые n-p-n в корпусе SOT23. Диоды VD1 – VD4 – любые Шоттки на ток 3А в корпусе SMC. DA1 можно заменить на 7812.
XP3 – разъем с ATX-материнки.
Трансформатор Т1 типа ТП121-8, ТП131-8 . Подойдет любой с выходным напряжением под нагрузкой 15 В и мощностью 4,5 ВА. Намоточные данные других индуктивных элементов приведены ниже.
|
Обмотка |
№ контакта (Н-К) |
Число витков |
Провод |
|
I |
4-2 |
16 |
МГТФ-0,08 |
|
II |
10-9 |
16 |
МГТФ-0,08 |
|
III |
6-7 |
16 |
МГТФ-0,08 |
|
Магнитопровод |
Ферритовое кольцо Т90 (К22,9х14,0х9,53) зеленого цвета, u=4600 |
||
Каждая из обмоток занимает 1 слой и равномерно распределена по кольцу. Сначала мотают обмотку I и покрывают ее слоем изоляции, например, фторопластовой ленты или лакоткани. Изоляция на этой обмотке определяет безопасность ИИП. Далее мотают обмотки II и III. Кольцо вертикально приклеивают к пластмассовой панельке с контактами, которую потом впаивают в плату. Следует отметить, что для нормальной работы этот трансформатор должен иметь минимальную индуктивность рассеяния, поэтому сердечник для него должен быть тороидальный и с максимальной магнитной проницаемостью. Я пробовал мотать этот транс на сердечнике Е20/10/6 из N67 – импульсы на затворах имели выбросы, которые приоткрывали второй транзистор полумоста:
Голубой график – импульсы на затворе VT2, желтый – напряжение на стоке VT2.
С тороидальным трансформатором, намотанным как написано выше, осциллограмма имеет такой вид:
При монтаже трансформатора управления необходимо соблюдать фазировку обмоток! При неправильной фазировке при включении сгорят транзисторы полумоста!
|
Обмотка |
№ контакта (Н-К) |
Число витков |
Провод |
|
I |
— |
1 |
МГТФ-0,35 |
|
II |
1-2-3 |
2х75 |
ПЭВ-2 0,23 |
|
Магнитопровод |
2 кольца К12х8х6 из феррита М3000НМ |
||
Обмотку II мотают в 2 провода, после намотки конец одной полуобмотки соединяют с началом другой и контактом 2. Обмотка I представляет собой отрезок провода, пропущенный через кольцо в виде буквы «П». Для повышения электрической и механической прочности изоляции на провод надета фторопластовая трубка.
|
Обмотка |
№ контакта (Н-К) |
Число витков |
Провод |
|
I |
4 – 2 |
18+18 |
3хПЭВ-2 0,41 |
|
II |
9 – 7 – 8 |
6+6 |
ПЭВ-2 0,41 |
|
III |
10 – 11 – 12 |
9+9 |
5хПЭВ-2 0,41 |
|
Магнитопровод |
EI 33,0/24,0/12,7/9,7 из феррита PC40 TDK |
||
Трансформатор рассчитан в программе ExcellentIT(5000) [7]. Сердечник извлечен из компового БП. Сначала мотается первая половина обмотки I. Поверх нее укладывается слой изоляции (я использую лавсановую пленку от фоторезиста) и экран – незамкнутый виток медной ленты, обернутой скотчем. Экран соединен с выводом 2 трансформатора. Далее кладется несколько слоев пленки или лакоткани и мотается обмотка III жгутом из 10 проводов. Мотать надо виток к витку сжав жгут пальцами так, чтобы все 10 проводов расположились в один ряд – иначе не влезет. Конец одной полуобмотки (5 проводов) соединяется с началом другой и выводом 11 каркаса. Обмотка III покрывается одним слоем лавсановой пленки, поверх которой укладывается обмотка II аналогично III. После этого укладывается еще несколько слоев пленки или лакоткани, незамкнутый виток изолированной медной фольги, соединенный с выводом 2, слой пленки, и мотается вторая половина первичной обмотки.
Такая намотка трансформатора позволяет уменьшить индуктивность рассеяния в четыре раза.
На все выводы первичной обмотки надевают фторопластовые трубки.
|
Обмотка |
Число витков |
Провод |
|
|
L3.1 |
24 |
ПЭВ-2 0,457 |
|
|
L3.2 |
24 |
ПЭВ-2 0,457 |
|
|
L3.3 |
40 |
ПЭВ-2 0,8 |
|
|
L3.4 |
40 |
ПЭВ-2 0,8 |
|
|
Магнитопровод |
Кольцо T106 (К26,9х14,5х11,1) из распыленного железа -26 (желто-белое) |
||
ДГС рассчитан в программе «CalcGRI» [8].
Сначала мотаются обмотки L3.3 и L3.4 одновременно в 2 провода. Они займут 2 слоя. Поверх них аналогично мотаются обмотки L3.1 и L3.2 в один слой. При монтаже ДГС на плату необходимо соблюдать фазировку обмоток!
Все моточные изделия рекомендуется пропитать лаком PLASTIK-71.
Транзисторы VT1, VT2 установлены на алюминиевом ребристом радиаторе размерами 60х15х40 мм и площадью поверхности 124 см2. Диоды VD9 – VD12 установлены на аналогичном радиаторе размерами 83х15х40 мм и площадью 191 см2. С указанной площадью теплоотводов блок питания способен работать длительное время под постоянной нагрузкой не более 100 Вт! Если ИИП предполагается использовать не для усилителя, а для питания нагрузки с постоянной потребляемой мощностью до 200 Вт, площадь радиаторов необходимо увеличить или применить принудительное охлаждение!
Выглядит собранный ИИП так:
Сначала на плату устанавливают все элементы, кроме VD1, VT1, VT2, T4, R7, C8, FU1. Включают ИИП в сеть и проверяют наличие напряжения +5 В на контакте 11 разъема XP3. После этого соединяют 1 и 11 контакты разъема XP3 и подключают двухлучевой осциллограф параллельно резисторам R3 и R4 (землю осцила на нижние концы резисторов, сигнальные щупы – на верхние. С установленными транзисторами и поданным силовым питанием так делать нельзя!!!). Осциллограмма должна иметь такой вид:
Если вдруг импульсы оказались у вас синфазными, значит вы накосячили при распайке обмоток трансформатора Т2. Поменяйте местами начало и конец нижней или верхней обмотки. Если этого не сделать, то при включении ИИП с ключами будет большой и красочный салют 🙂
Если у вас нет двухлучевого осциллографа, можно по очереди проверить форму и наличие импульсов однолучевым, но при этом остается полагаться только на собственную внимательность при распайке трансформатора Т4.
Если у вас до сих пор ничего не взорвалось, не нагрелось, импульсы есть и правильно сфазированы, можно впаять все недостающие элементы и произвести первое включение. На всякий случай рекомендую это сделать через лампочку Ильича ватт на 150 (если сможете купить :D). По-хорошему, чтобы ничего не сжечь, ее конечно надо включать в разрыв цепи между плюсом С5 и полумостом. Но так как у нас печатная плата, это сделать затруднительно. При включении в разрыв сетевого провода от нее толку мало, но все-таки как-то спокойнее)). Включаем ИИП на холостом ходу и замеряем выходные напряжения. Они должны быть приблизительно равны номинальным.
Подключаем между выходами «+25 В» и «-25 В» нагрузку 100 Вт. Для этих целей удобно использовать обычный чайник 220 В 2,2 кВт, предварительно наполнив его водой. Один чайник нагружает ИИП примерно на 90 – 100 Вт. Снова замеряем выходные напряжения. Если они значительно отличаются от номинальных, вгоняем их в допустимые пределы подборкой резисторов R4 и R6 в модуле А1.
Если ИИП работает неустойчиво – выходное напряжение колеблется с некоторой частотой, необходимо подобрать элементы компенсации обратной связи C6, R9, R10. Увеличение емкости С10 увеличивает инерционность ИИП и повышает стабильность, однако чрезмерное увеличение его емкости приведет к замедлению ОС и возрастанию пульсаций выходного напряжения. Теперь можно проверить ИИП на максимальной нагрузке. Если ИИП под нагрузкой запускается неустойчиво, либо переходит в «икающий» режим, можно попробовать увеличить емкость конденсатора С3, однако слишком увлекаться этим не рекомендую – это приведет к снижению быстродействия защиты по току и возрастанию ударных перегрузок элементов ИИП при КЗ. Также можно попробовать уменьшить номинал R8. При указанном на схеме значении защита срабатывает при амплитуде тока первичной обмотки Т4 около 5 А. К слову скажу, что максимально допустимый ток стока примененных транзисторов – 8 А.
Если и теперь ничего не взорвалось, все транзисторы и конденсаторы остались на своих местах, блок питания удовлетворяет приведенным в начале статьи характеристикам, а чайник согрелся, подключаем к БП усилок и наслаждаемся музыкой, попивая свежеприготовленный чаек 🙂
PS: Я испытал свой ИИП совместно с усилителем на LM3886. Никакого фона в колонках я не заметил (что не скажешь о комповых колонках с «классическим» трансформатором). Звук очень понравился.
Удачной сборки!
- Схемы ШИМ-контроллеров К1156ЕУ2, К1156ЕУ3 https://www.sitsemi.ru/kat/1156eu23.pdf
- Широтно-импульсные контроллеры серий КР1156ЕУ2 и КР1156ЕУ3. – Радио, 2003, №6, с. 47 – 50.
- Разработка и применение высокоскоростных схем управления силовыми полевыми транзисторами https://valvolodin.narod.ru/articles/FETsCntr.pdf
- Расчет и применение GDT https://bsvi.ru/raschet-i-primenenie-gdt/
- DC-DC конвертер К1156ЕУ5 https://www.sitsemi.ru/kat/1156eu5c.pdf
- Программа «DrosselRing» https://radiokot.ru/forum/download/file.php?id=106660
- Программа «ExcellentIT(5000)» https://radiokot.ru/forum/download/file.php?id=106659
- Программа «CalcGRI» https://radiokot.ru/forum/download/file.php?id=106664
Файлы:
Фотография
Плата в формате Sprint Layout 5.0
Все вопросы в Форум.
Как вам эта статья? | Заработало ли это устройство у вас? |
www.radiokot.ru
cxema.org — Мощный стабилизатор тока и напряжения на TL494
Мощный стабилизатор тока и напряжения на TL494
Этот стабилизатор обладает неплохими характеристиками, имеет плавную регулировку тока и напряжения, хорошую стабилизацию, без проблем терпит короткие замыкания, относительно простой и не требует больших финансовых затрат. Он обладает высоким кпд за счет импульсного принципа работы, выходной ток может доходить до 15 ампер, что позволит построить мощное зарядное устройство и блок питания с регулировкой тока и напряжения. При желании можно увеличить выходной ток до 20-и и более ампер.
В интернете подобных устройств, каждое имеет свои достоинства и недостатки, но принцип работы у них одинаковый. Предлагаемый вариант — это попытка создания простого и достаточно мощного стабилизатора.
За счет применения полевых ключей удалось значительно увеличить нагрузочную способность источника и снизить нагрев на силовых ключах. При выходном токе до 4-х ампер транзисторы и силовой диод можно не устанавливать на радиаторы.
Номиналы некоторых компонентов на схеме могут отличаться от номиналов на плате, т.к. плату разрабатывал для своих нужд.
Диапазон регулировки выходного напряжения от 2-х до 28 вольт, в моем случае максимальное напряжение 22 вольта, т.к. я использовал низковольтные ключи и поднять напряжение выше этого значения было рискованно, а так при входном напряжении около 30 Вольт, на выходе спокойно можно получить до 28-и Вольт. Диапазон регулировки выходного тока от 60mA до 15A Ампер, зависит от сопротивления датчика тока и силовых элементов схемы.
Устройство не боится коротких замыканий, просто сработает ограничение тока.
Собран источник на базе ШИМ контроллера TL494, выход микросхемы дополнен драйвером для управления силовыми ключами.
Хочу обратить ваше внимание на батарею конденсаторов установленных на выходе. Следует использовать конденсаторы с низким внутренним сопротивлением на 40-50 вольт, с суммарной емкостью от 3000 до 5000мкФ.
Нагрузочный резистор на выходе применен для быстрого разряда выходных конденсаторов, без него измерительный вольтметр на выходе будет работать с запаздыванием, т.к. при уменьшении выходного напряжения конденсаторам нужно время, для разрядки, а этот резистор быстро их разрядит. Сопротивление этого резистора нужно пересчитать, если на вход схемы подается напряжение больше 24-х вольт. Резистор двух ваттный, рассчитан с запасом по мощности, в ходе работы может греться, это нормально.
Как это работает:
ШИМ контроллер формирует управляющие импульсы для силовых ключей. При наличии управляющего импульса транзистор, и питание по открытому каналу транзистора через дроссель поступает на накопительный конденсатор. Не забываем, что дроссель является индуктивной нагрузкой, которым свойственно накапливание энергии и отдача за счет самоиндукции. Когда транзистор закрывается накопленный в дросселе заряд через диод шоттки продолжит подпитывать нагрузку. Диод в данном случае откроется, т.к. напряжение с дросселя имеет обратную полярность. Этот процесс будет повторяться десятки тысяч раз в секунду, в зависимости от рабочей частоты микросхемы ШИМ. По факту ШИМ контроллер всегда отслеживает напряжение на выходном конденсаторе.
Стабилизация выходного напряжения происходит следующим образом. На неинвертирующий вход первого усилителя ошибки микросхемы (вывод 1) поступает выходное напряжение стабилизатора, где оно сравнивается с опорным напряжением, которое присутствует на инверсном входе усилителя ошибки. При снижении выходного напряжения будет снижаться и напряжение на выводе 1, и если оно будет меньше опорного напряжения, ШИМ контроллер будет увеличивать длительности импульсов, следовательно транзисторы больше времени будут находиться в открытом состоянии и больше тока будет накачиваться в дроссель, если же выходное напряжение больше опорного, произойдет обратное — микросхема уменьшит длительность управляющих импульсов. Указанным делителем можно принудительно менять напряжение на неинвертирующщем входе усилителя ошибки, этим увеличивая или уменьшая выходное напряжение стабилизатора в целом. Для наиболее точной регулировки напряжения применён подстроечный многооборотный резистор, хотя можно использовать обычный.
Минимальное выходное напряжение составляет порядка 2 вольт, задается указанным делителем, при желании можно поиграться с сопротивлением резисторов для получения приемлемых для вас значений, не советуется снижать минимальное напряжение ниже 1 вольта.
Для отслеживания потребляемого нагрузкой тока установлен шунт. Для организации функции ограничения тока задействован второй усилитель ошибки в составе ШИМ контроллера тл494. Падение напряжения на шунте поступает на неинвертирующий вход второго усилителя ошибки, опять сравнивается с опорным, а дальше происходит точно тоже самое, что и в случае стабилизации напряжения. Указанным резистором можно регулировать выходной ток.
Токовый шунт изготовлен из двух параллельно соединённых низкоомных резисторов с сопротивлением 0,05Ом.
Накопительный дроссель намотан на желто белом кольце от фильтра групповой стабилизации компьютерного блока питания.
Так как схема планировалась на довольно большой входной ток, целесообразно использовать два сложенных вместе кольца. Обмотка дросселя содержит 20 витков намотанных двумя жилами провода диаметром 1,25мм в лаковой изоляции, индуктивность около 80-90 микрогенри.
Диод желательно использовать с барьером Шоттки и обратным напряжением 100-200 вольт, в моем случае применена мощная диодная сборка MBR4060 на 60 вольт 40 Ампер.
Силовые ключи вместе с диодом устанавливают на общий радиатор, притом изолировать подложки компонентов от радиатора не нужно, т.к. они общие.
Подробное описание и испытания блока можно посмотреть в видео
Печатная плата тут
- < Назад
- Вперёд >
vip-cxema.org
