Каковы основные компоненты коллекторного электродвигателя постоянного тока. Как работает коллекторный двигатель. Какие существуют типы коллекторных электродвигателей. Каковы основные характеристики и параметры коллекторных двигателей постоянного тока.
Конструкция коллекторного электродвигателя постоянного тока
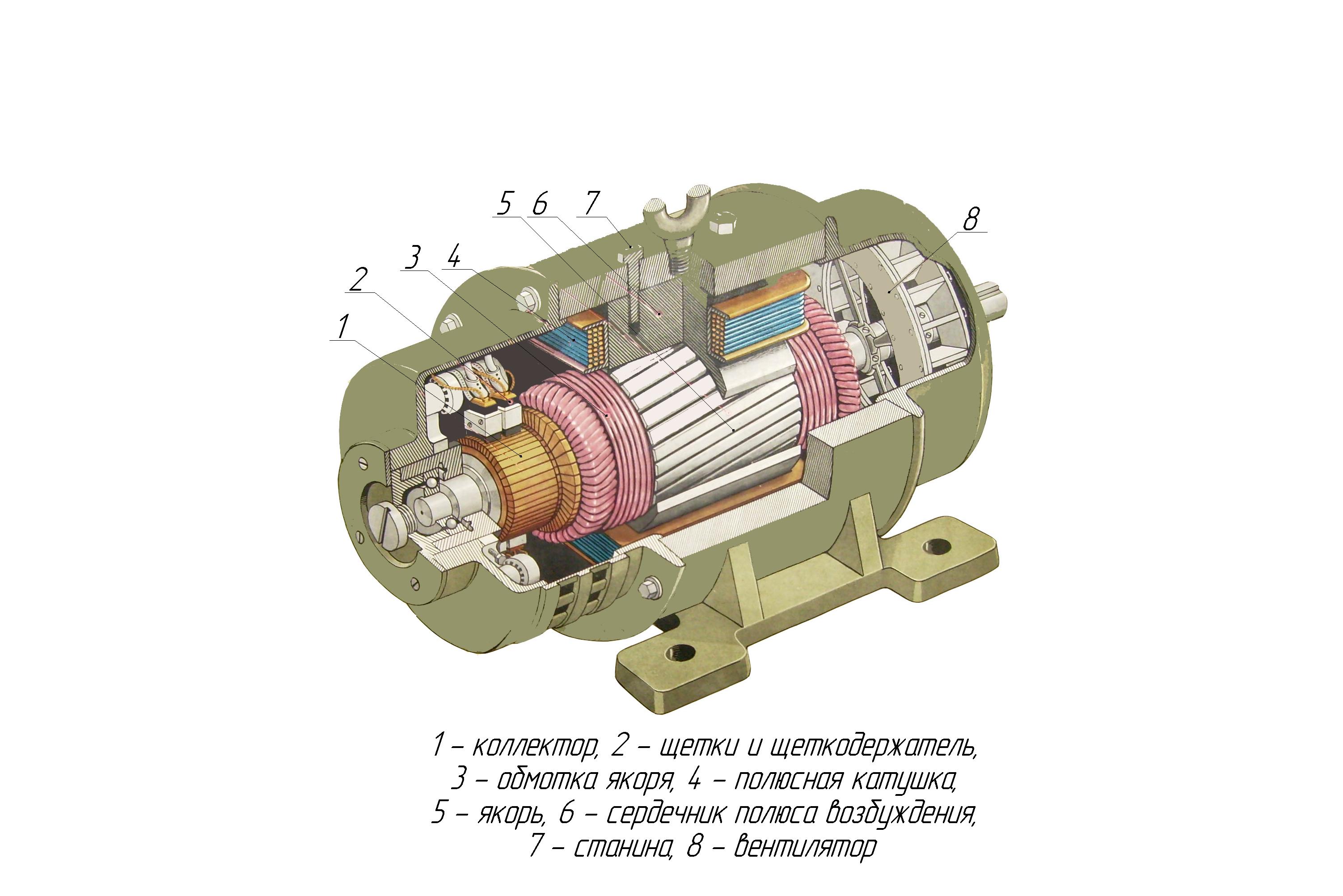
Коллекторный электродвигатель постоянного тока состоит из следующих основных частей:
- Статор — неподвижная часть двигателя, создающая основное магнитное поле. Может содержать постоянные магниты или электромагниты.
- Ротор (якорь) — вращающаяся часть двигателя, в которой индуцируется ЭДС и протекает рабочий ток.
- Коллектор — устройство для переключения тока в обмотках ротора.
- Щетки — обеспечивают электрический контакт между неподвижными и вращающимися частями двигателя.
- Подшипники — обеспечивают вращение ротора.
Принцип работы коллекторного двигателя постоянного тока
Принцип работы коллекторного двигателя основан на взаимодействии магнитных полей статора и ротора:
- При подаче напряжения на обмотки якоря через щетки и коллектор в них начинает протекать ток.
- Взаимодействие тока якоря с магнитным полем статора создает вращающий момент.
- Коллектор обеспечивает переключение тока в обмотках якоря, поддерживая вращение ротора.
- При вращении в обмотках якоря индуцируется ЭДС, направленная против приложенного напряжения.
Типы коллекторных электродвигателей постоянного тока
В зависимости от способа возбуждения магнитного поля статора различают следующие типы коллекторных двигателей:
Двигатели с постоянными магнитами
Магнитное поле статора создается постоянными магнитами. Отличаются простотой конструкции и высокой надежностью. Применяются в маломощных приводах.
Двигатели с электромагнитным возбуждением
Магнитное поле статора создается электромагнитами. По способу включения обмотки возбуждения бывают:
- С параллельным возбуждением
- С последовательным возбуждением
- Со смешанным возбуждением
Основные характеристики коллекторного электродвигателя постоянного тока
Основными эксплуатационными характеристиками коллекторных двигателей являются:
Механическая характеристика
Зависимость частоты вращения от момента на валу. Определяет жесткость характеристики двигателя.
Регулировочная характеристика
Зависимость частоты вращения от тока возбуждения. Показывает возможности регулирования скорости изменением магнитного потока.
Рабочие характеристики
Зависимости частоты вращения, момента, КПД, тока от мощности на валу двигателя.
Основные параметры электродвигателя постоянного тока
Ключевыми параметрами коллекторного двигателя являются:
- Номинальная мощность
- Номинальное напряжение
- Номинальная частота вращения
- Номинальный момент
- КПД
- Момент инерции ротора
- Электромагнитная постоянная времени
- Механическая постоянная времени
Регулирование скорости вращения коллекторного двигателя постоянного тока
Существуют следующие основные способы регулирования частоты вращения коллекторных двигателей:
Изменение напряжения на якоре
При уменьшении напряжения на якоре скорость вращения снижается. Это наиболее экономичный способ регулирования.

Изменение магнитного потока
Путем регулирования тока возбуждения можно изменять магнитный поток и, соответственно, скорость вращения. Применяется для увеличения скорости выше номинальной.
Введение добавочного сопротивления в цепь якоря
Позволяет снизить скорость вращения, но приводит к дополнительным потерям энергии. Применяется, в основном, для пуска двигателя.
Тормозные режимы коллекторного двигателя постоянного тока
Для быстрой остановки или реверса коллекторных двигателей применяют следующие тормозные режимы:
Генераторное торможение
Возникает при превышении скорости вращения якоря скорости холостого хода. Двигатель переходит в генераторный режим, отдавая энергию в сеть.
Торможение противовключением
Осуществляется путем изменения полярности напряжения на якоре. Создает большой тормозной момент, но сопровождается большими токами.Динамическое торможение
Обмотка якоря отключается от сети и замыкается на сопротивление. Кинетическая энергия ротора рассеивается в виде тепла.
Преимущества и недостатки коллекторных двигателей постоянного тока
Коллекторные двигатели постоянного тока имеют следующие достоинства:
- Высокий пусковой момент
- Широкий диапазон регулирования скорости
- Хорошие динамические характеристики
- Возможность работы на постоянном и переменном токе
К недостаткам можно отнести:
- Наличие щеточно-коллекторного узла, требующего обслуживания
- Относительно высокая стоимость
- Искрение на коллекторе
- Ограничение по мощности и напряжению
Применение коллекторных электродвигателей постоянного тока
Коллекторные двигатели постоянного тока широко применяются в следующих областях:
- Электроприводы станков и промышленных роботов
- Тяговые двигатели электротранспорта
- Сервоприводы систем автоматики
- Электроинструмент
- Бытовая техника
- Автомобильное электрооборудование
Благодаря хорошей управляемости и высоким динамическим характеристикам коллекторные двигатели постоянного тока остаются востребованными во многих отраслях, несмотря на развитие бесколлекторных двигателей.
Регулирование скорости вращения коллекторного двигателя постоянного тока
Двигатели постоянного тока и мотор-редукторы, созданные на их основе, нуждаются в надежной системе управления скоростью вращения вала. Простым и удобным методом решения проблемы является применение широтно-импульсной модуляции (ШИМ). Способ основан на преобразовании постоянного напряжения в импульсное. При этом управление частотой вращения осуществляют путем изменения длительности подающегося импульса.
Например, по такому же принципу используют ШИМ схему в осветительных приборах для регулировки яркости свечения светодиодных ламп. Так как у светодиода небольшое время затухания частота работы устройства регулирования имеет большое значение. Качественные приборы должны полностью исключать мерцание при пониженной яркости свечения.
Управление двигателями постоянного тока методом ШИМ стало возможным благодаря силе инерции. После прекращения подачи напряжения на обмотки вал электродвигателя останавливается не сразу, продолжая движение по инерции. Путем кратковременной подачи напряжения с определенным периодом можно добиться плавного регулирования скорости вращения вала. При этом главным регулирующим параметром является размер паузы между импульсами.
Путем кратковременной подачи напряжения с определенным периодом можно добиться плавного регулирования скорости вращения вала. При этом главным регулирующим параметром является размер паузы между импульсами.
Применение устройства управления для двигателя постоянного тока
Этот метод управления двигателем постоянного тока позволяет плавно изменять скорость вращения вала в широких пределах. ШИМ делает возможным изменение параметров работы двигателя в автоматическом режиме в соответствии с установленными данными. Необходимую информацию регулятор оборотов коллекторного двигателя получает от пользователя или специального датчика, который определяет, температуру, скорость вращения или любой другой параметр. Например, в воздушных системах охлаждения регулятор оборотов изменяет скорость вращения вентилятора на основе данных, полученных от датчика температуры. Это позволяет автоматически замедлять скорость потока воздуха при низкой температуре и увеличивать при высокой.
Схема управления коллекторным двигателем постоянного тока
Простую схему управления
двигателем постоянного тока можно собирать из полевого транзистора.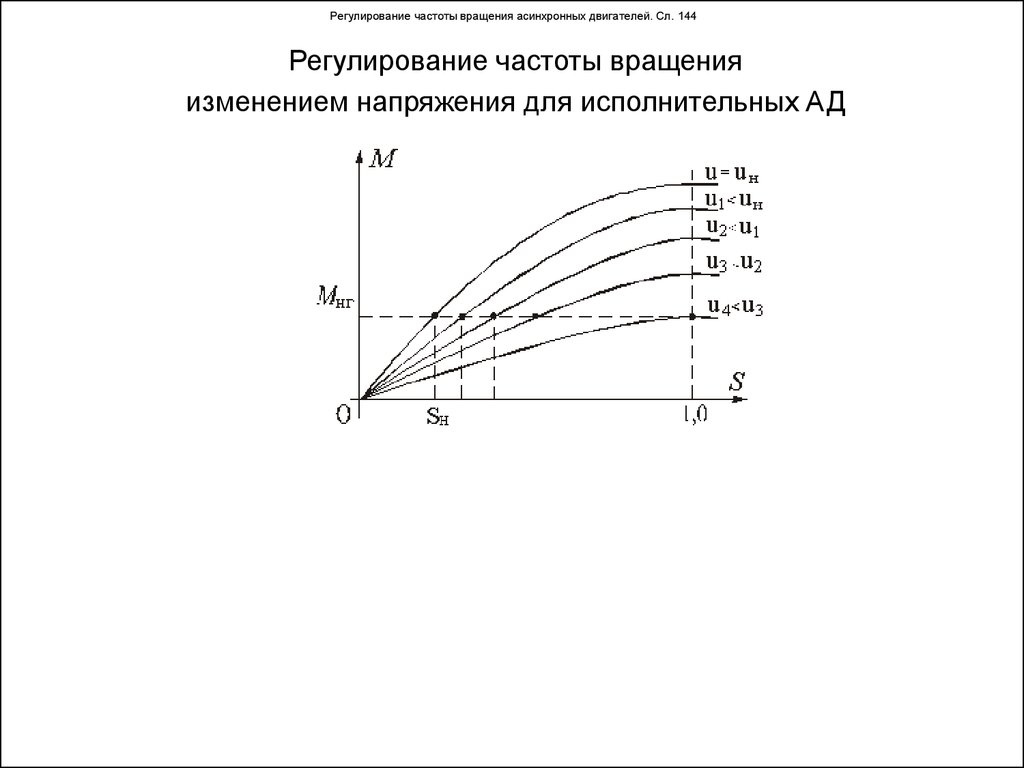 Он играет роль электронного ключа, который переключает схему питания двигателя после подачи напряжения на базу. Электронный ключ остается открытым на время, соответствующее длительности импульса.
Он играет роль электронного ключа, который переключает схему питания двигателя после подачи напряжения на базу. Электронный ключ остается открытым на время, соответствующее длительности импульса.
ШИМ сигнал характеризуют коэффициентом заполнения, который равен обратной величие скважности. Коэффициент заполнения равен отношению продолжительности импульса к периоду его подачи. Скорость движения вала двигателя будет пропорциональна значению коэффициента заполнения. Поэтому, если частота ШИМ сигнала слишком низкая для обеспечения стабильной работы, то вал двигателя будет вращаться заметными рывками. Чтобы гарантировать плавное регулирование и стабильную работу частота должна превышать сотни герц.
Оптимальные значения частоты ШИМ сигнала
Частота может варьироваться в широких пределах от нескольких десятков до нескольких сотен герц. Благодаря емкостной нагрузке происходит сглаживание импульсов. В итоге на двигатель подается «постоянное» напряжение средней величины в зависимости от параметров управляющей системы. Например, если двигатель получает питание от сети напряжением 10В, и к нему подключить регулятор с длительностью импульса равной половине периода подачи, то эффект будет таким же, как при подаче 5В на двигатель напрямую.
Например, если двигатель получает питание от сети напряжением 10В, и к нему подключить регулятор с длительностью импульса равной половине периода подачи, то эффект будет таким же, как при подаче 5В на двигатель напрямую.
Сложности при ШИМ регулировании скорости двигателя постоянного тока
ШИМ является популярным методом регулирования аналоговым напряжением в различных схемах. При использовании этого способа регулирования пользователь может столкнуться с непредсказуемым поведением двигателя. Например, вал может начать вращение в обратную сторону. Это происходит при низких емкостных нагрузках. В коллекторных двигателях в процессе работы происходит постоянное переключение обмоток якоря. Когда подключают регулятор, начинает происходить отключение и включение питание с определенной частотой. Дополнительная коммутация в сочетании с коллекторной может привести к проблемам с эксплуатацией двигателя. Поэтому устройства управления с ШИМ регулированием двигателя должны быть тщательно продуманы и проработаны.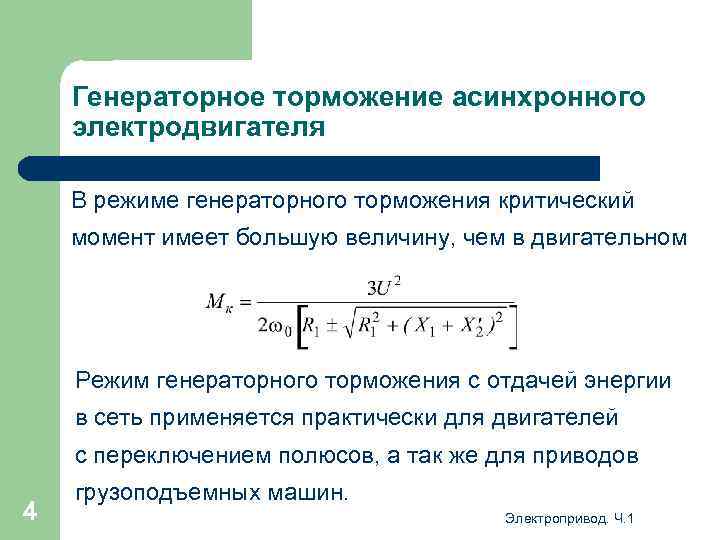
Также причиной нестабильной работы электродвигателя может стать факт влияния силы тока на скорость вращения ротора, которая находится в зависимости от уровня приложенного напряжения. Проблемы могут возникнуть при эксплуатации двигателей на малой скорости по отношению к номинальному значению.
Например, у пользователя есть двигатель, который при номинальном напряжение вращает ротор со скоростью 10об/сек. Чтобы понизить скорость до 1 об/сек недостаточно просто снизить напряжение до 1В. Подобрать подходящее значение подаваемого напряжения сложно и если пользователю и удастся, то при незначительном изменении условий эксплуатации скорость снова изменится.
Решением проблемы является применение системы автоматического регулирования или кратковременное включение электродвигателя на полную мощность. Движение ротора будет происходить рывками, но при правильно подобранной частоте и длительности подаваемых импульсов можно сделать вращение более стабильным. Так, добиваются устойчивого движения вала электродвигателя с любой скоростью, которая не будет меняться в зависимости от нагрузки.
Реализация ШИМ
Многие модели современных ПЛК контроллеров предоставляют возможность организации ШИМ. Но иногда доступных каналов оказывается недостаточно и приходится использовать программу обработки прерывай.
Алгоритм реализации ШИМ:
- В начале каждого импульса ставим единицу и ждем повышения значения до заданного уровня.
- Сбрасываем линию на ноль.
Длительность импульса легче отследить с определенной периодичностью или ступенями. Например, десять регулировочных ступеней соответствуют 10% от максимального значения. Прежде всего необходимо определиться с частотой импульсов и количеств ступеней регулирования. Далее, умножают полученные значения. Результат произведения даст необходимую частоту прерываний таймера.
При желании можно выбрать подходящую частоту таймера или количество ступеней регулирования и путем расчетов находят необходимую частоту импульсов.
Так же по теме регулирования скорости коллекторного двигателя предлагаем статью «Управление коллекторным двигателем постоянного тока методом ШИМ»
Коллекторный электродвигатель постоянного тока
Дмитрий Левкин
- Конструкция коллекторного электродвигателя постоянного тока
- Типы коллекторных электродвигателей С постоянными магнитами
- С обмотками возбуждения
- Основные параметры электродвигателя постоянного тока
- Характеристики коллекторного электродвигателя постоянного тока
Коллекторный электродвигатель постоянного тока
— вращающаяся электрическая машина постоянного тока, преобразующая электрическую энергию постоянного тока в механическую энергию, у которой хотя бы одна из обмоток, участвующих в основном процессе преобразования энергии, соединена с коллектором.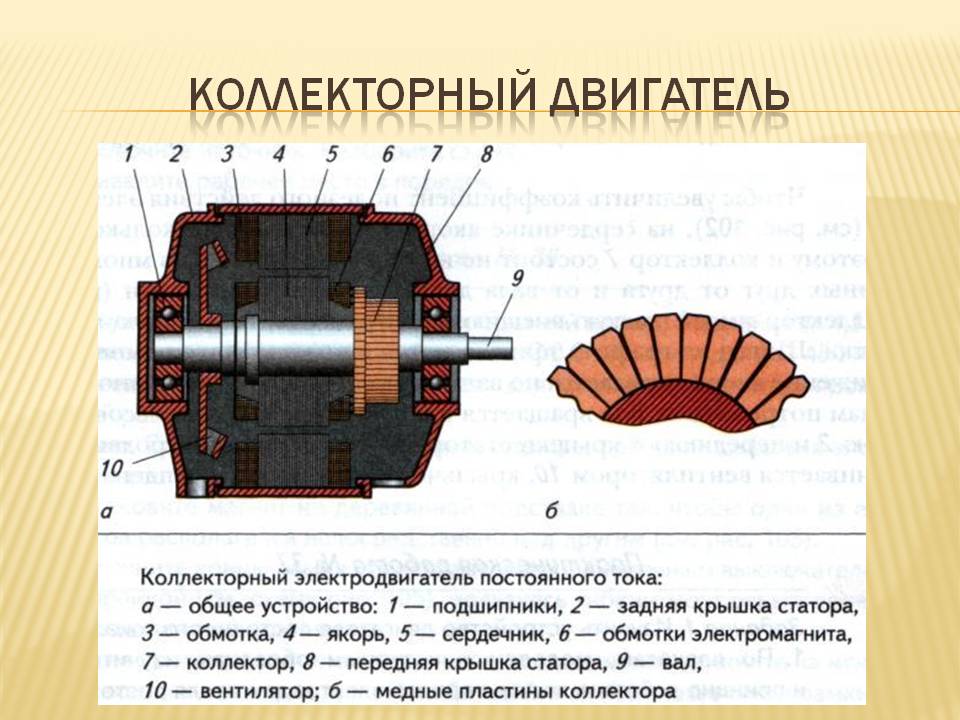
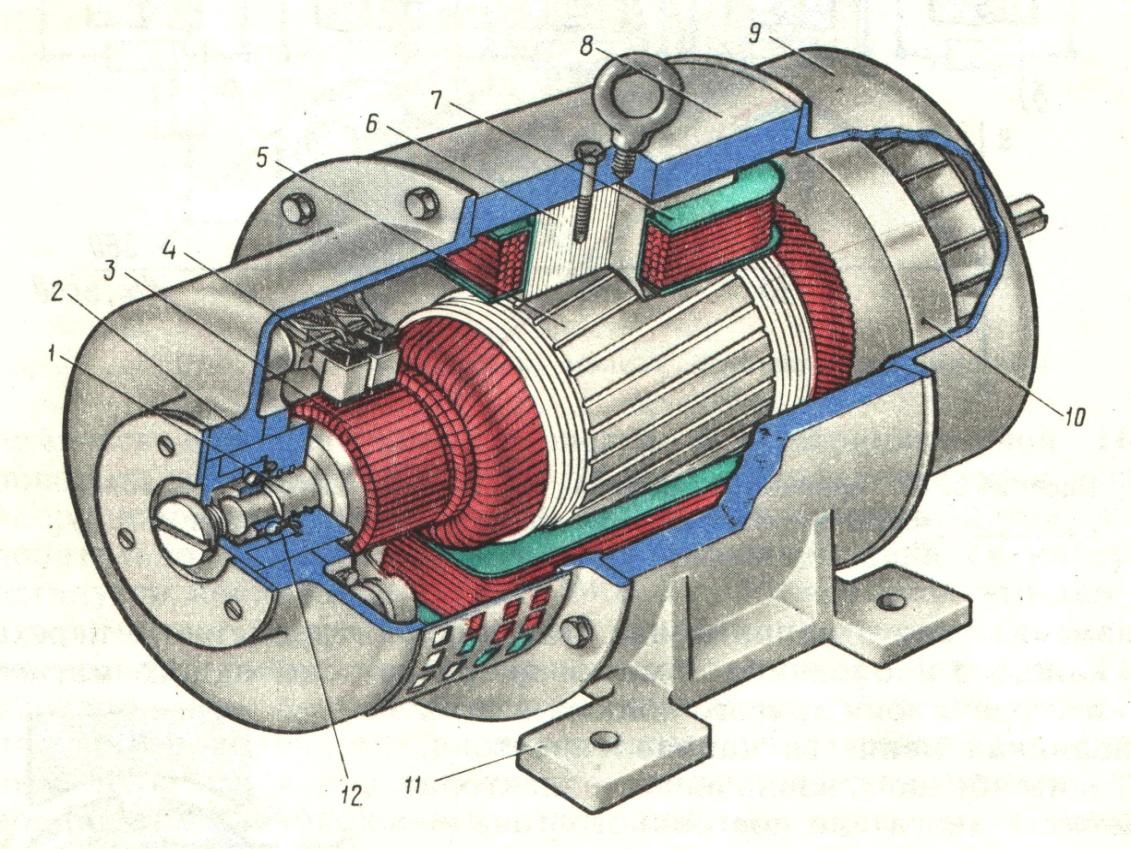
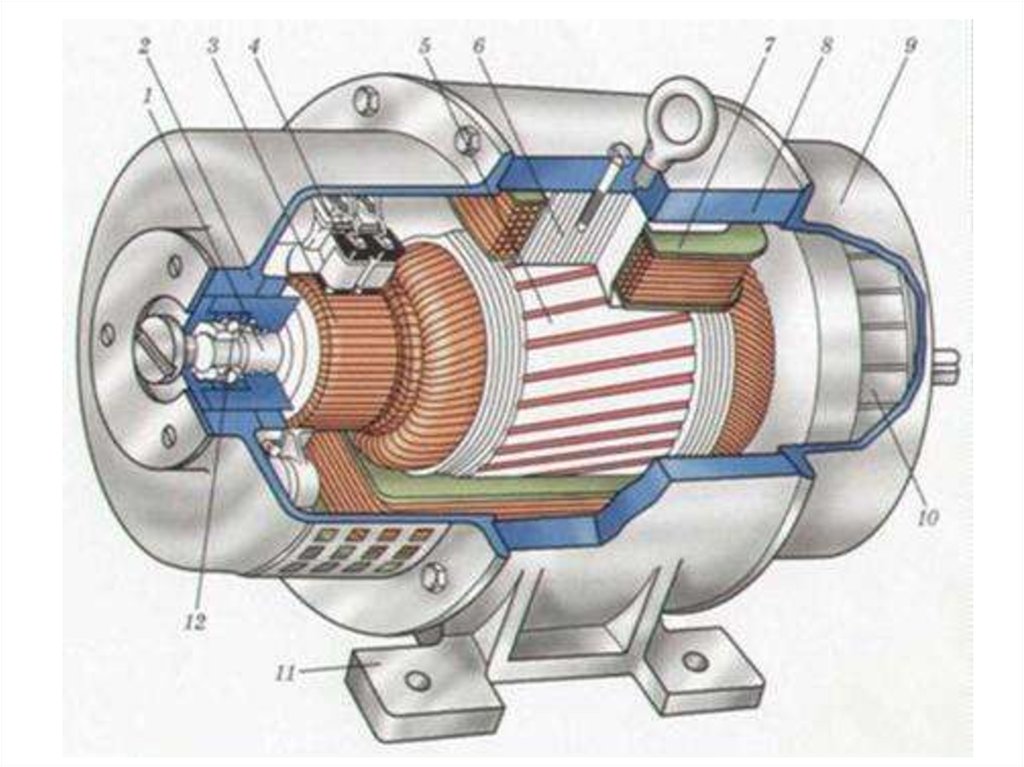
Конструкция коллекторного электродвигателя постоянного тока
Статор (постоянный магнит)
Ротор (якорь)
Щетки
Коллектор
Рисунок 1 — Электродвигатель постоянного тока с постоянными магнитами в разрезе
Ротор
— вращающаяся часть электрической машины.
Статор
— неподвижная часть двигателя.
Индуктор
(система возбуждения) — часть коллекторной машины постоянного тока или синхронной машины, создающая магнитный поток для образования момента. Идуктор обязательно включает либо
постоянные магниты
либо
обмотку возбуждения
. Индуктор может быть частью как ротора так и статора. В двигателе, изображенном на рис. 1, система возбуждения состоит из двух постоянных магнитов и входит в состав статора.
Якорь
— часть коллекторной машины постоянного тока или синхронной машины, в которой индуктируется электродвижущая сила и протекает ток нагрузки [2]. В качестве якоря может выступать как ротор так и статор. В двигателе, показанном на рис. 1, ротор является якорем.
В двигателе, показанном на рис. 1, ротор является якорем.
Щетки
— часть электрической цепи, по которой от источника питания электрический ток передается к якорю. Щетки изготавливаются из графита или других материалов. Двигатель постоянного тока содержит одну пару щеток или более. Одна из двух щеток соединяется с положительным, а другая — с отрицательным выводом источника питания.
Коллектор
— часть двигателя, контактирующая со щетками. С помощью щеток и коллектора электрический ток распределяется по катушкам обмотки якоря [1].
Принцип работы коллекторного двигателя
Двигатели параллельного возбуждения
Схема двигателя.
Схема двигателя параллельного возбуждения изображена на рис. 1.25. Обмотка якоря и обмотка возбуждения включены параллельно. В этой схеме: I – ток, потребляемый двигателем из сети, Iя – ток якоря, Iв –ток возбуждения. Из первого закона Кирхгофа следует, что I = Iя + Iв.
Естественная механическая характеристика. Естественная механическая характеристика описывается формулой (1.6).
Естественная механическая характеристика описывается формулой (1.6).
При холостом ходе М = 0 и nх = U/СЕФ.
Если Ф = const, то уравнение механической характеристики принимает вид:
n = nх – bМ, (1.8)
где b = Rя/СЕФ.
Из (1.8) следует, что механическая характеристика (рис. 1.26, прямая 1) – прямая с углом наклона a и угловым коэффициентом b. Так как у двигателей постоянного тока Rя мало, то с увеличением нагрузки на валу частота вращения n изменяется незначительно – характеристики подобного типа называются «жесткими».
Ток, потребляемый двигателем из сети, практически растет пропорционально моменту нагрузки. Действительно, М » Мэм = См Iя Ф, и так как у двигателя параллельного возбуждения Ф = const, то Iя ~ М.
Регулирование частоты вращения.
Регулирование частоты вращения возможно из (1.6) тремя способами: изменением магнитного потока главных полюсов Ф, изменением сопротивления цепи якоря Rя и изменением подводимого к цепи якоря напряжения U (изменение n за счет изменения момента нагрузки М в понятие регулирования не входит).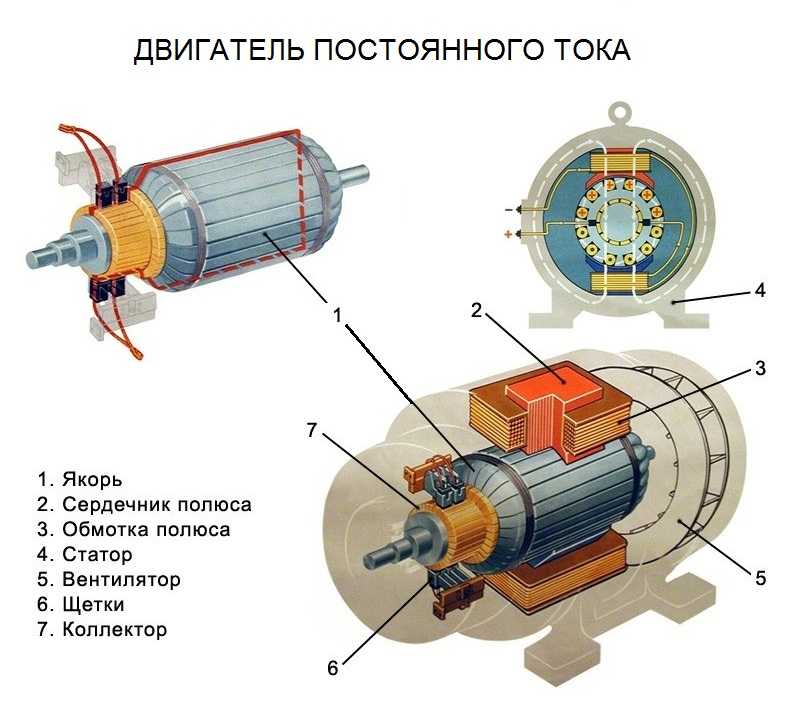
Регулирование n изменением магнитного потока Ф осуществляется с помощью регулировочного реостата Rр. При увеличении сопротивления реостата ток возбуждения Iв имагнитный поток главных полюсов Ф уменьшаются. Это приводит, во-первых, к увеличению частоты вращения холостого хода nх и, во-вторых, к увеличению коэффициента b, т.е. к увеличению угла наклона механической характеристики. Однако b остается небольшим и жесткость механических характеристик сохраняется. На рис. 1.28 помимо естественной характеристики 1, соответствующей максимальному магнитному потоку Ф, приведено семейство механических характеристик 2-4, снятых при уменьшенном магнитном потоке. Из характеристик следует, что изменением магнитного потока можно только увеличивать частоту вращения относительно естественной характеристики. Практически частоту вращения таким методом можно увеличивать не более чем в 2 раза, так как увеличение скорости приводит к ухудшению коммутации и даже механическим повреждениям машины.
Другой способ регулирования скорости связан с включением последовательно с якорем регулировочного реостата Rя.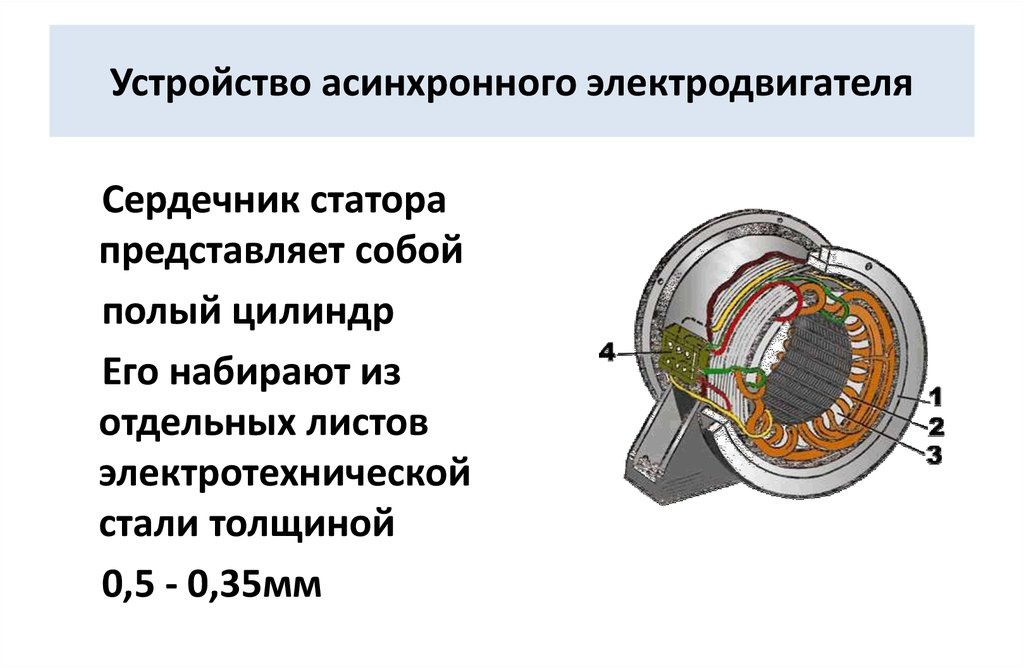 р (пусковой реостат Rп для этой цели непригоден, так как он рассчитан на кратковременный режим работы). Формула (1.6) при этом принимает вид:
р (пусковой реостат Rп для этой цели непригоден, так как он рассчитан на кратковременный режим работы). Формула (1.6) при этом принимает вид:
n = ,
(1.9)
откуда следует, что скорость при холостом ходе при любом сопротивлении Rя.р одинакова, а коэффициент b и, следовательно, наклон механических характеристик 5-7 увеличивается (рис. 1.26). Регулирование частоты вращения этим способом приводит к уменьшению частоты вращения относительно естественной характеристики. Кроме того, оно неэкономично, так как связано с большой мощностью потерь (Rя.р I) в регулировочном реостате, по которому протекает весь ток якоря.
Третий способ регулирования частоты вращения – безреостатное изменение подводимого к якорю напряжения. Он возможен только в случае, когда якорь двигателя питается от отдельного источника, напряжение которого можно регулировать. В качестве регулируемого источника применяются отдельные, специально предназначенные для данного двигателя генераторы или управляемые вентили (тиратроны, ртутные выпрямители, тиристоры).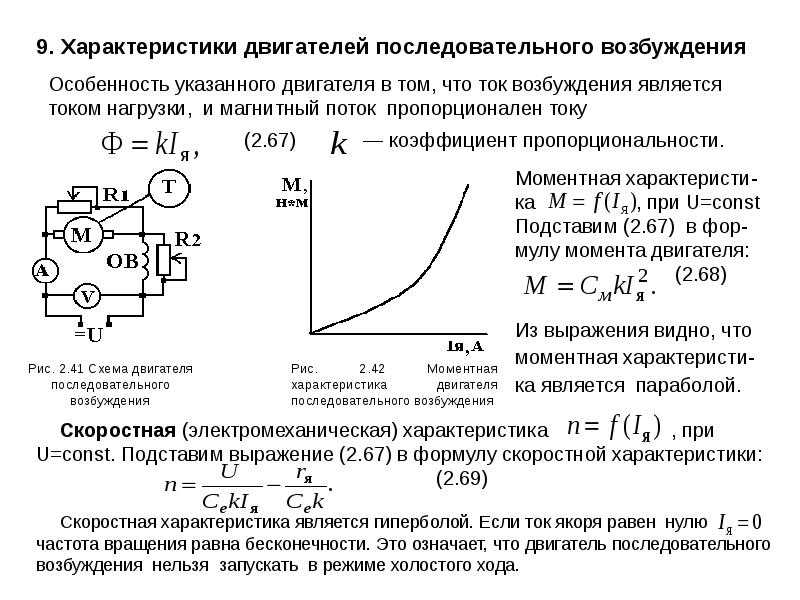 В первом случае образуется система машин, называемая системой Г-Д (генератор – двигатель), (рис. 1.27). Она применяется для плавного регулирования в широких пределах частоты вращения мощных двигателей постоянного тока и в системах автоматического управления. Система регулирования с управляемыми вентилями УВ (рис. 1.28) находит применение для регулирования частоты вращения двигателей меньшей мощности. Ее преимущество – большая экономичность.
В первом случае образуется система машин, называемая системой Г-Д (генератор – двигатель), (рис. 1.27). Она применяется для плавного регулирования в широких пределах частоты вращения мощных двигателей постоянного тока и в системах автоматического управления. Система регулирования с управляемыми вентилями УВ (рис. 1.28) находит применение для регулирования частоты вращения двигателей меньшей мощности. Ее преимущество – большая экономичность.
Регулирование частоты вращения изменением U практически возможно только в сторону уменьшения, так как увеличение напряжения выше номинального недопустимо из-за резкого ухудшения коммутации. Из (1.9) следует, что при уменьшении напряжения уменьшается скорость холостого хода nх, а наклон механических характеристик 8-10 не изменяется (см. рис. 1.26), они остаются жесткими даже при низких напряжениях. Диапазон регулирования (nmax/nmin) таким способом 6:1-8:1. Он может быть значительно расширен при применении специальных схем с обратными связями.
Регулировочная характеристика.
Регулировочная характеристика n=f(Iв) двигателя параллельного возбуждения изображена на рис. 1.29.
Ее характер определяется зависимостью (1.5), из которой следует, что частота вращения обратно пропорциональна магнитному потоку и, следовательно, току возбуждения Iв. При токе возбуждения Iв = 0, что может быть при обрыве цепи возбуждения, магнитный поток равен остаточному Фост и частота вращения становится настолько большой, что двигатель может механически разрушиться, – подобное явление называется разносом двигателя.
Физически явление разноса объясняется тем, что вращающий момент (1.2) при уменьшении магнитного потока, казалось бы, должен уменьшиться, однако ток якоря Iя = (U – E)/Rя увеличивается значительнее, так как уменьшается Е (1.1) и разность U – E увеличивается в большей степени (обычно Е » 0,9 U).
Тормозные режимы.
Тормозные режимы двигателя имеют место тогда, когда электромагнитный момент, развиваемый двигателем, действует против направления вращения якоря. Они могут возникать в процессе работы двигателя при изменении условий работы или создаваться искусственно с целью быстрого уменьшения скорости, остановки или реверсирования двигателя.
Они могут возникать в процессе работы двигателя при изменении условий работы или создаваться искусственно с целью быстрого уменьшения скорости, остановки или реверсирования двигателя.
У двигателя параллельного возбуждения возможны три тормозных режима: генераторное торможение с возвратом энергии в сеть, торможение противовключением и динамическоеторможение.
Генераторное торможение возникает в тех случаях, когда частота вращения якоря n становится больше частоты вращения при идеальном (т.е. при Мпр = 0) холостом ходе nx(n>nx). Переход в этот режим из режима двигателя возможен, например, при спуске груза, когда момент, создаваемый грузом, приложен к якорю в том же направлении, что и электромагнитный момент двигателя, т.е. тогда, когда момент нагрузки действует согласно с электромагнитным моментом двигателя и он набирает скорость, большую чем nx. Если n>nx, то Е>Uc(где Uc– напряжение сети) и ток двигателя изменяет свой знак (1.4) – электромагнитный момент из вращающего становится тормозным, а машина из режима двигателя переходит в режим генератора и отдает энергию в сеть (рекуперация энергии). Переход машины из двигательного режима в генераторный иллюстрируется механической характеристикой (рис. 1.30). Пусть в двигательном режиме a1 – рабочая точка; ей соответствует момент М. Если частота вращения увеличивается, то рабочая точка по характеристике 1 из квадранта I переходит в квадрант II, например, в рабочую точку a2, которой соответствует частота вращения n΄ и тормозной момент – М΄.
Переход машины из двигательного режима в генераторный иллюстрируется механической характеристикой (рис. 1.30). Пусть в двигательном режиме a1 – рабочая точка; ей соответствует момент М. Если частота вращения увеличивается, то рабочая точка по характеристике 1 из квадранта I переходит в квадрант II, например, в рабочую точку a2, которой соответствует частота вращения n΄ и тормозной момент – М΄.
Торможение противовключением возникает в работающем двигателе, когда направление тока в якоре или тока возбуждения переключается на противоположное. Электромагнитный момент при этом изменяет знак и становится тормозным.
Работе двигателя с противоположным направлением вращения соответствуют механические характеристики, располагающиеся в квадрантах II и III (например, естественная характеристика 2 на рис. 1.30).
Внезапный переход на эту характеристику практически недопустим, так как сопровождается чрезмерно большим броском тока и тормозного момента. По этой причине одновременно с переключением одной из обмоток в цепь якоря включается добавочное сопротивление Rдоб, ограничивающее ток якоря.
Механическая характеристика режима с Rдоб имеет большой наклон (прямая 3). При переходе в режим противовключения частота вращения n в первый момент измениться не может (из-за инерционности якоря) и рабочая точка из положения a1 перейдет в положение a3 на новой характеристике. Из-за появления Мтор частота вращения n будет быстро падать до тех пор, пока рабочая точка a3 не перейдет в положение a4, соответствующее остановке двигателя. Если в этот момент двигатель не отключить от источника питания, то якорь изменит направление вращения. Машина начнет работать в двигательном режиме с новым направлением вращения, а ее рабочая точка a5 будет находиться на механической характеристике 3 в квадранте III.
Динамическое торможение возникает в тех случаях, когда якорь двигателя отключается от сети и замыкается на сопротивление динамического торможения Rд.т. Уравнение характеристики (1.6) принимает вид:
n =
что соответствует семейству прямых 4 (при разных Rд.т), проходящих через начало координат. При переключении в этот режим рабочая точка a1 переходит на одну из характеристик 4, например, в точку a6, а затем перемещается по прямой 4 до нуля. Якорь двигателя тормозится до полной остановки. Изменением сопротивления Rд.т можно регулировать ток якоря и скорость торможения.
При переключении в этот режим рабочая точка a1 переходит на одну из характеристик 4, например, в точку a6, а затем перемещается по прямой 4 до нуля. Якорь двигателя тормозится до полной остановки. Изменением сопротивления Rд.т можно регулировать ток якоря и скорость торможения.
Характеристики коллекторного электродвигателя постоянного тока
Эксплуатационные свойства двигателей постоянного тока определяются их рабочими, электромеханическими и механическими характеристиками, а также регулировочными свойствами.
Механические характеристики коллекторных двигателей постоянного тока
6.3. Генераторы с последовательным возбуждением.
Якорь у таких генераторах соединен последовательно с обмоткой возбуждения, поэтому ток нагрузки является током возбуждения и током якоря (рис.6.8).Сопротивление обмотки возбуждения должно быть соизмеримо с сопротивлением обмотки якоря, то есть мало (малое число витков толстого провода).
Так как обмотка якоря соединена последовательно с обмоткой возбуждения, характеристика холостого хода у такого генератора отсутствует. Для внешней характеристики генератора характерно наличие максимума, связанное с тем, что при достижении значительных токов нагрузки магнитная система насыщается и магнитный поток уже не растет, а выходное напряжение начинает уменьшаться из-за увеличения падения напряжения на обмотке якоря. Такие генераторы используются очень редко.
Для внешней характеристики генератора характерно наличие максимума, связанное с тем, что при достижении значительных токов нагрузки магнитная система насыщается и магнитный поток уже не растет, а выходное напряжение начинает уменьшаться из-за увеличения падения напряжения на обмотке якоря. Такие генераторы используются очень редко.
Основные параметры электродвигателя постоянного тока
Постоянная момента
Для коллекторного электродвигателя постоянного тока постоянная момента определяется по формуле:
,
- где Z — суммарное число проводников,
- Ф – магнитный поток, Вб [1]
Смотрите также
Основные параметры электродвигателя постоянного тока
Ключевые параметры электродвигателя постоянного тока
- Постоянная момента
- Постоянная ЭДС
- Постоянная электродвигателя
- Жесткость механической характеристики
- Напряжение электродвигателя
- Механическая постоянная времени
Основные параметры электродвигателя
Общие параметры для всех электродвигателей
- Момент электродвигателя
- Мощность электродвигателя
- Коэффициент полезного действия
- Номинальная частота вращения
- Момент инерции ротора
- Номинальное напряжение
- Электрическая постоянная времени
6.
 1. Генераторы с независимым возбуждением.
1. Генераторы с независимым возбуждением.В подобных генераторах обмотка возбуждения питается от отдельного источника, вследствие чего ток возбуждения не зависит от напряжения генератора, а следовательно, от условий нагрузки (рис.6.4).
Это дает возможность в очень широких пределах менять магнитный поток, а следовательно, и ЭДС, возникающую на обмотке якоря. Зависимость ЭДС от тока возбуждения при постоянном числе оборотов называется характеристикой холостого хода (рис. 6.5).
Наличие остаточной намагниченности системы возбуждения приводит к тому, что при отсутствии тока возбуждения, ЭДС возбуждения в якоре не равна 0, а равна остаточной ЭДС, Е0. С ростом тока возбуждения магнитное поле возрастает и приводит к магнитному насыщению системы возбуждения, вследствие чего, при значительных токах возбуждения ЭДС не возрастает.
Вид этой характеристики аналогичен подобной характеристике синхронного генератора.
Важной характеристикой генератора является внешняя зависимость напряжения U
на выходе генератора от силы тока якоря (рис. 6.6.А). Эта зависимость определяется соотношением:
6.6.А). Эта зависимость определяется соотношением:
(6.2)
где Е
— ЭДС якоря,
I
н — ток нагрузки,
R
я — сопротивление обмотки якоря и представляет собой прямую (рис. 6.6.Б пунктир).
Однако, при значительных токах нагрузки появляется насыщение магнитной системы и возникает размагничивающее действие реакции якоря, что приводит к уменьшению суммарного магнитного потока, а следовательно ЭДС и выходного напряжения быстрее, чем по прямой линии.
Пуск путем изменения питающего напряжения
Одним из вариантов снижения токовой нагрузки при запуске электродвигателя является уменьшение питающего номинала посредством генератора постоянного напряжения или управляемого выпрямителя.
С физической точки зрения установка реостата обеспечивает тот же эффект, но с увеличением мощности электродвигателя возрастает и постоянная токовая нагрузка, существенно повышаются потери на реостатах. Поэтому снижение постоянного напряжения выполняет отдельное устройство на базе микросхемы, пример которого приведен на рисунке ниже:
Рис.
 5. Схема пуска с изменением питающего напряжения
5. Схема пуска с изменением питающего напряжения6.4. Генераторы смешанного возбуждения.
Такие генераторы имеют две обмотки возбуждения: одну, включенную параллельно обмотке якоря и имеющую значительное сопротивление, и вторую, включенную последовательно, со значительно меньшим сопротивлением (аналогично генераторам последовательного и смешанного соединения) (рис.6.9).
Эти обмотки могут быть включены либо согласно, либо встречно.
В генераторах с согласным включением обмоток выходное напряжение почти не меняется с изменением нагрузки (рис.6.10.А).
Это происходит потому, что магнитный поток последовательной обмотки создается током нагрузки и при увеличении нагрузки возрастает, компенсируя влияние реакции якоря и увеличение падения напряжения внутри генератора.
Генераторы со встречным включением обмоток имеют крутопадающую внешнюю характеристику (рис.6.10.Б). При увеличении тока нагрузки встречный магнитный поток последовательной обмотки размагничивает генератор, и выходное напряжение резко снижается.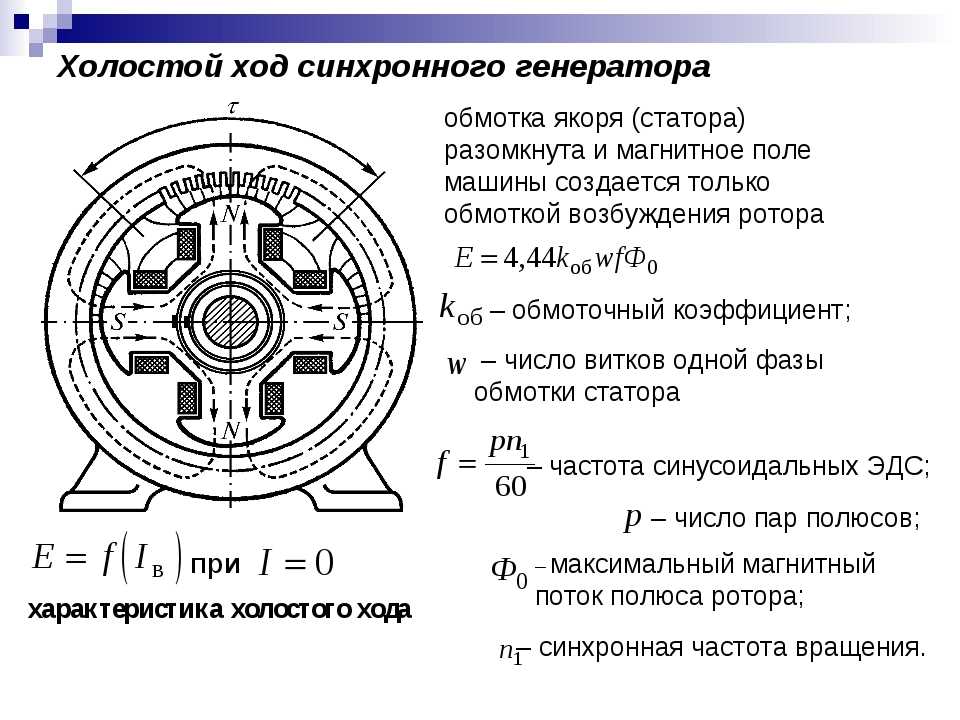 Наиболее часто подобные генераторы используются в качестве сварочных, т.к. для поддержания горения дуги требуются именно крутопадающие внешние характеристики.
Наиболее часто подобные генераторы используются в качестве сварочных, т.к. для поддержания горения дуги требуются именно крутопадающие внешние характеристики.
Ротор и коллектор электродвигателя / Обмотка якоря / Коллектор якоря Электродвигателя
Большинство бытовых швейных машин, даже некоторые промышленные, используют электродвигатели со щетками, их еще называют коллекторными электродвигателями. Электродвигатели также используются во всех ручных электроинструментах (дрели, шлифовальные машины, фрезерные станки, ручные пилы, лобзики и т. д.). У коллекторных электродвигателей чаще всего проблемы и отказы возникают на роторе, реже на статоре. Самая чувствительная часть, так сказать, это…
коллектор ротора. Сам коллектор имеет цилиндрическую форму и множество различных размеров, в основном это зависит от мощности двигателя, его предполагаемой скорости, нагрузки и т. д. На коллектор опираются так называемые щетки, они сделаны из графита, который является отличным проводником, не очень жесткий и хорошо переносит температуру, которая создается на коллекторе.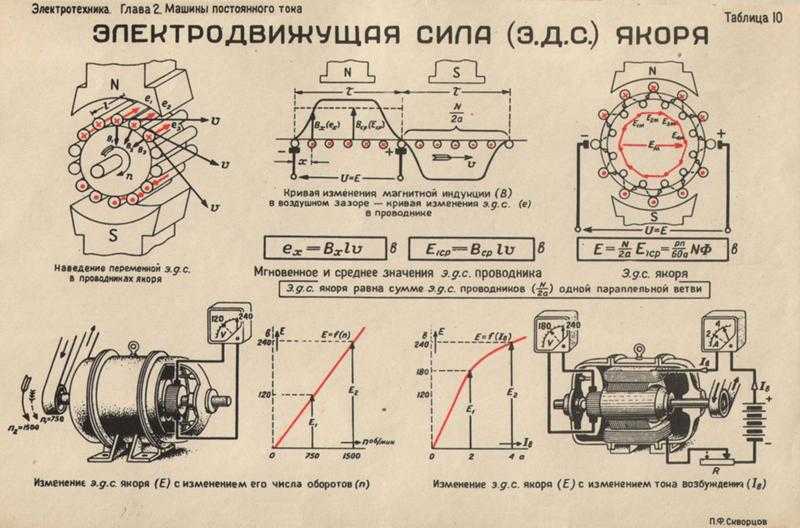 Коллектор и щетки подвержены износу, эта проблема связана с качеством электродвигателя, а также коллектора, долговечностью использования машины (аппарата или электроинструмента). Коллектор состоит из большего или меньшего…
Коллектор и щетки подвержены износу, эта проблема связана с качеством электродвигателя, а также коллектора, долговечностью использования машины (аппарата или электроинструмента). Коллектор состоит из большего или меньшего…
количество медных пластин (ламелей), которые отделены друг от друга изоляционным материалом. Основным признаком того, что с коллектором что-то не так, является появление крупных искр с разлетом искр по краю коллектора, при появлении которых необходимо остановить машину и прекратить дальнейшие работы. Работа в таких условиях может навсегда и необратимо разрушить ротор и, таким образом, избавить вас от ненужного обслуживания и ремонта, которые хорошо знают специалисты по обслуживанию. Наша сегодняшняя тема — осмотр коллектора, замена щеток и окончательная его регулировка.
Ротор на ручном инструменте обычно установлен на двух роликовых подшипниках, тогда как на двигателях бытовых швейных машин подшипники обычно скользящего типа, то есть сами втулки, вал ротора также являются частью подшипников скольжения. Наш сегодняшний пример — электродвигатель швейной машины Pfaff 1222, в процессе одна реставрация, поэтому воспользовался случаем сделать несколько, надеюсь, интересных фото. Двигатель работает, но одна дополнительная чистка коллектора ему не помешает.
Наш сегодняшний пример — электродвигатель швейной машины Pfaff 1222, в процессе одна реставрация, поэтому воспользовался случаем сделать несколько, надеюсь, интересных фото. Двигатель работает, но одна дополнительная чистка коллектора ему не помешает.
Итак имеем ситуацию, когда двигатель сильно греется, искры на коллекторе, необходимо собрать двигатель из прибора или станка, разобрать двигатель настолько, чтобы можно было полностью собрать ротор. Щетки необходимо осмотреть в первую очередь, как правило, если двигатель работает плохо, а кончики щеток неровные и не такие гладкие, как в обычных ситуациях. Обычно они изношены (укорочены) и нуждаются в замене на новые. Теперь берем ротор и чистим хлопчатобумажной тканью в комплекте, возможно хорошо пропылесосьте сжатым воздухом. Осмотр хорошо делать под лупой, если она у вас есть, расстояние между рейками должно быть одинаковым, появление большего расстояния между…
отдельные ламели — плохой признак и обычно такому ротору ничем не помочь. Если поверхность коллектора частично повреждена, ее необходимо выровнять. Швейные машины имеют сравнительно небольшие двигатели и обработку коллектора можно производить на обычной дрели, которая закрепляется на специальном держателе (см. рисунок), можно и без него, но это намного сложнее. При заданном диаметре коллектор был лишь частично засален и загрязнен, особых вмятин не было. Старые щетки могут изнашивать лопасти коллектора и, устанавливая новые, их прилегание будет некачественным, из-за чего коллектор необходимо выровнять. Для этого нам понадобятся: маленький тонкий напильник, защитная креп-лента и мелкая наждачная бумага.
Если поверхность коллектора частично повреждена, ее необходимо выровнять. Швейные машины имеют сравнительно небольшие двигатели и обработку коллектора можно производить на обычной дрели, которая закрепляется на специальном держателе (см. рисунок), можно и без него, но это намного сложнее. При заданном диаметре коллектор был лишь частично засален и загрязнен, особых вмятин не было. Старые щетки могут изнашивать лопасти коллектора и, устанавливая новые, их прилегание будет некачественным, из-за чего коллектор необходимо выровнять. Для этого нам понадобятся: маленький тонкий напильник, защитная креп-лента и мелкая наждачная бумага.
Мы защищаем обмотки вокруг коллектора и концы крепированной лентой, чтобы они не были повреждены. На более длинных роторах требуется фиксация с обеих сторон, в данном случае это более короткий ротор и в этом нет необходимости. Включите дрель, но уменьшите ее скорость до минимума с помощью регулятора на переключателе, запустите дрель и тонким напильником слегка снимите поверхность коллектора, перемещение напильника такое же, как и у стоящих предметов, сильно не нажимайте без надобности. Поверхность вскоре начнет выравниваться. Глубина съема коллектора достаточно вариабельна, обычно достаточно около 0,1 мм, а на более крупных моторах (электростартер 12/24В) можно снять до 0,5 мм и даже больше.
Поверхность вскоре начнет выравниваться. Глубина съема коллектора достаточно вариабельна, обычно достаточно около 0,1 мм, а на более крупных моторах (электростартер 12/24В) можно снять до 0,5 мм и даже больше.
В основном на двигателях швейных машин обычно до 0,15 мм. Как только заметим, что вся поверхность чистая, останавливаемся с напильником и берем мелкую наждачку, скажем тонкости нет. 500, может какая-то меньшая крупность, повторить пару раз. Окончательную полировку можно сделать куском более прочного войлока или мягкой кожи, так же зачищаем концы вала ротора, но с добавлением немного масла. В случае очистки штифтов целью является не истончение, а только восстановление эмали подшипника.
После всего собрать мотор, так как подшипники скользящего типа, не забыть про втулки и добавить немного специальной подшипниковой смазки во втулки скольжения, наконец вернуть щетки и запустить мотор (машину). Вначале возможно искрообразование, но кратковременно, в том случае, если даже после данного вмешательства коллектор сильно искрит и создает высокую температуру, ротор подлежит ремонту (намотке). Есть также небольшие устройства, которые могут проверить правильность работы ротора, некоторые электрики их делают, ничего особенного, но вполне эффективное.
Есть также небольшие устройства, которые могут проверить правильность работы ротора, некоторые электрики их делают, ничего особенного, но вполне эффективное.
ПРЕДУПРЕЖДЕНИЕ: Опасность поражения электрическим током !! Поскольку это устройства, которые обычно находятся под напряжением 110-220 В, не обходите это, если вы не уверены на 100% в своих знаниях. !!
Так как на наш сайт заходят мастера всех профилей, спрошу электромехаников: Нет ли ошибки в вышеприведенном посте, надо ли ее исправить? ☺
Электрические асинхронные двигатели — синхронная скорость
Синхронная скорость асинхронного электрического двигателя определяется
- блок питания частота и
- количество полюсов в обмотке двигателя.

Синхронная скорость может быть рассчитана как:
n = F (2 / P) 60 (1)
, где
N = Скорость поворота шалля (revitud об/мин)
f = частота электропитания (Гц, цикл/сек, 1/сек)
p = количество полюсов
Примечание — асинхронный двигатель никогда не достигнет своей синхронной скорости. Если бы это было так, то ротор казался бы неподвижным по отношению к вращающемуся полю статора, поскольку он вращался бы с той же скоростью. При отсутствии относительного движения между полем статора и ротора в двигателе не будет индуцироваться напряжение. Поэтому скорость асинхронного двигателя ограничивается скоростью ниже синхронной скорости, а разница между синхронной скоростью и фактической скоростью называется скольжением.
Пример — Синхронная скорость электродвигателя с двумя полюсами
На двигатель с двумя полюсами подается питание с частотой 50 Гц (1/с) .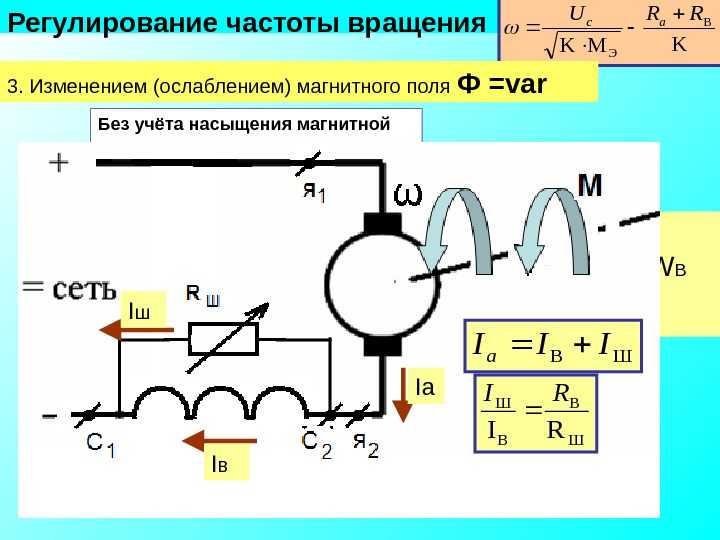 Скорость вращения можно рассчитать как
Скорость вращения можно рассчитать как
n = (50 1/с) (2 / 2) (60 с/мин)
= 3000 об/мин (3 1/мин) скорость вращения при различных частотах и числе полюсов
Скорость вращения вала — n — (rev/min, rpm) Frequency
— f —
(Hz) Number of poles — p — 2 4 6 8 10 12 10 600 300 200 150 120 100 20 1200 600 400 300 240 200 30 1800 900 600 450 360 300 40 2400 1200 800 600 480 400 50 1) 3000 1500 1000 750 600 500 60 2) 3600 1800 1200 900 720 600 70 4200 2100 1400 1050 840 700 80 4800 2400 1600 1200 960 800 90 5400 2700 1800 1350 1080 900 100 6000 3000 2000 1500 1200 1000
- Motors designed for 50 Hz наиболее распространены за пределами США
- Двигатели, рассчитанные на 60 Гц, наиболее распространены в США.

