Как на самом деле работает частотный преобразователь для асинхронного двигателя. Какие распространенные заблуждения существуют о принципе его работы. Почему выходной сигнал преобразователя не синусоидальный. Как формируется выходное напряжение преобразователя.
Принцип работы частотного преобразователя
Частотный преобразователь — это устройство, которое позволяет регулировать скорость вращения асинхронного электродвигателя путем изменения частоты и амплитуды питающего напряжения. Однако вокруг принципа работы преобразователей частоты существует немало мифов и заблуждений. Рассмотрим основные из них.
Миф 1: Выходной сигнал преобразователя синусоидальный
Это распространенное заблуждение основано на том, что при прямом питании электродвигателя от сети на его обмотки подается синусоидальное напряжение. Однако выходной сигнал частотного преобразователя имеет совершенно иную природу.
На самом деле принцип работы частотного преобразователя заключается в следующем:

- Входное переменное напряжение выпрямляется в постоянное
- Выпрямленное напряжение фильтруется и накапливается в конденсаторах звена постоянного тока
- Затем это напряжение инвертируется обратно в переменное с помощью IGBT-транзисторов
- Управляя включением и выключением транзисторов, формируется выходной сигнал нужной частоты
Таким образом, на выходе преобразователя формируется не синусоида, а последовательность прямоугольных импульсов. Лишь после фильтрации этот сигнал приобретает форму, близкую к синусоидальной.
Как на самом деле формируется выходное напряжение?
Выходное напряжение частотного преобразователя формируется методом широтно-импульсной модуляции (ШИМ). Суть этого метода заключается в следующем:
- Выходное напряжение формируется в виде последовательности прямоугольных импульсов
- Частота следования импульсов (несущая частота) обычно составляет 2-16 кГц
- Ширина импульсов модулируется по синусоидальному закону
- При увеличении частоты ШИМ форма напряжения приближается к синусоиде
Таким образом, хотя мгновенные значения напряжения и имеют прямоугольную форму, но его среднее значение за период модуляции изменяется по синусоидальному закону. Это и позволяет регулировать скорость вращения двигателя.

Преимущества метода ШИМ
Использование широтно-импульсной модуляции для формирования выходного напряжения преобразователя имеет ряд важных преимуществ:
- Высокий КПД преобразования энергии (до 98%)
- Плавное регулирование частоты и напряжения в широком диапазоне
- Возможность реализации векторного управления двигателем
- Малые массогабаритные показатели преобразователя
Именно поэтому метод ШИМ получил наибольшее распространение в современных частотных преобразователях для асинхронных двигателей.
Правда о других мифах
Помимо неверного представления о форме выходного сигнала, существуют и другие распространенные заблуждения о принципах работы частотных преобразователей:
Миф 2: Преобразователь всегда повышает КПД двигателя
На самом деле это справедливо только для некоторых применений, например, для вентиляторов и насосов. В других случаях КПД может даже снижаться за счет дополнительных потерь в преобразователе.
Миф 3: Преобразователь защищает двигатель от перегрузок
Хотя большинство преобразователей имеют встроенные защитные функции, они не могут заменить специализированные устройства защиты двигателя. Требуется комплексный подход к обеспечению защиты электропривода.

Миф 4: Частотный преобразователь подходит для любого двигателя
На самом деле не все двигатели рассчитаны на работу с преобразователем частоты. Требуется проверка совместимости и, возможно, применение дополнительных фильтров.
Миф 5: Преобразователь всегда экономит электроэнергию
Экономия энергии достигается только при правильном подборе и настройке преобразователя под конкретную задачу. В некоторых режимах работы экономии может не быть вовсе.
Заключение
Понимание истинных принципов работы частотных преобразователей позволяет грамотно подойти к их выбору и эксплуатации. Важно опираться на достоверную техническую информацию, а не на распространенные мифы и заблуждения. Только так можно обеспечить надежную и эффективную работу электропривода с частотным управлением.
Принцип работы частотного преобразователя для асинхронного двигателя
Содержание:
- Что такое частотный преобразователь
- Принцип действия
- Настройка частотного преобразователя для электродвигателя
- Подбор частотного преобразователя для двигателя
- Видео
Трехфазные асинхронные двигатели нашли самое широкое применение в промышленности и других областях. Современное оборудование просто невозможно представить без этих агрегатов. Одной из важнейших составляющих рабочего цикла машин и механизмов является их плавный пуск и такая же плавная остановка после выполнения поставленной задачи. Такой режим обеспечивается путем использования преобразователей частоты. Эти устройства проявили себя наиболее эффективными в больших электродвигателях, обладающих высокой мощностью.
С помощью преобразователей частоты успешно выполняется регулировка пусковых токов, с возможностью контроля и ограничения их величины до нужных значений. Для правильного использования данной аппаратуры необходимо знать принцип работы частотного преобразователя для асинхронного двигателя. Его применение позволяет существенно увеличить срок службы оборудования и снизить потери электроэнергии. Электронное управление, кроме мягкого пуска, обеспечивает плавную регулировку работы привода в соответствии с установленным соотношением между частотой и напряжением.
Что такое частотный преобразователь
Основной функцией частотных преобразователей является плавная регулировка скорости вращения асинхронных двигателей. С этой целью на выходе устройства создается трехфазное напряжение с переменной частотой.

Преобразователи частоты нередко называются инверторами. Их основной принцип действия заключается в выпрямлении переменного напряжения промышленной сети. Для этого применяются выпрямительные диоды, объединенные в общий блок. Фильтрация тока осуществляется конденсаторами с высокой емкостью, которые снижают до минимума пульсации поступающего напряжения. В этом и заключается ответ на вопрос для чего нужен частотный преобразователь.
В некоторых случаях в схему может быть включена так называемая цепь слива энергии, состоящая из транзистора и резистора с большой мощностью рассеивания. Данная схема применяется в режиме торможения, чтобы погасить напряжение, генерируемое электродвигателем. Таким образом, предотвращается перезарядка конденсаторов и преждевременный выход их из строя. В результате использования частотников, асинхронные двигатели успешно заменяют электроприводы постоянного тока, имеющие серьезные недостатки. Несмотря на простоту регулировки, они считаются ненадежными и дорогими в эксплуатации. В процессе работы постоянно искрят щетки, а электроэрозия приводит к износу коллектора. Двигатели постоянного тока совершенно не подходят для взрывоопасной и запыленной среды.

В отличие от них, асинхронные двигатели значительно проще по своему устройству и надежнее, благодаря отсутствию подвижных контактов. Они более компактные и дешевые в эксплуатации. К основному недостатку можно отнести сложную регулировку скорости вращения традиционными способами. Для этого было необходимо изменять питающее напряжение и вводить дополнительные сопротивления в цепь обмоток. Кроме того, применялись и другие способы, которые на практике оказывались неэкономичными и не обеспечивали качественной регулировки скорости. Но, после того как появился преобразователь частоты для асинхронного двигателя, позволяющий плавно регулировать скорость в широком диапазоне, все проблемы разрешились.
Одновременно с частотой изменяется и подводимое напряжение, что позволяет увеличить КПД и коэффициент мощности электродвигателя. Все это позволяет получить высокие энергетические показатели асинхронных двигателей, продлить срок их эксплуатации.
Принцип действия частотного преобразователя
Эффективное и качественное управление асинхронными электродвигателями стало возможно за счет использования совместно с ними частотных преобразователей. Общая конструкция представляет собой частотно-регулируемый привод, который позволил существенно улучшить технические характеристики машин и механизмов.

В качестве управляющего элемента данной системы выступает преобразователь частоты, основной функцией которого является изменение частоты питающего напряжения. Его конструкция выполнена в виде статического электронного узла, а формирование переменного напряжения с заданной изменяемой частотой осуществляется на выходных клеммах. Таким образом, за счет изменения амплитуды напряжения и частоты регулируется скорость вращения электродвигателя.
Управление асинхронными двигателями осуществляется двумя способами:
- Скалярное управление действует в соответствии с линейным законом, согласно которому амплитуда и частота находятся в пропорциональной зависимости между собой. Изменяющаяся частота приводит к изменениям амплитуды поступающего напряжения, оказывая влияние на уровень крутящего момента, коэффициент полезного действия и коэффициент мощности агрегата. Следует учитывать зависимость выходной частоты и питающего напряжения от момента нагрузки на валу двигателя. Для того чтобы момент нагрузки был всегда равномерным, отношение амплитуды напряжения к выходной частоте должно быть постоянным. Данное равновесие как раз и поддерживается частотным преобразователем.
- Векторное управление удерживает момент нагрузки в постоянном виде во всем диапазоне частотных регулировок. Повышается точность управления, электропривод более гибко реагирует на изменяющуюся выходную нагрузку. В результате, момент вращения двигателя находится под непосредственным управлением преобразователя. Нужно учитывать, что момент вращения образуется в зависимости от тока статора, а точнее – от создаваемого им магнитного поля. Под векторным управлением фаза статорного тока изменяется. Эта фаза и есть вектор тока осуществляющий непосредственное управление моментом вращения.
Настройка частотного преобразователя для электродвигателя
Для того чтобы преобразователь частоты для асинхронного двигателя в полном объеме выполнял свои функции, его необходимо правильно подключить и настроить. В самом начале подключения в сети перед прибором размещается автоматический выключатель. Его номинал должен совпадать с величиной тока, потребляемого двигателем. Если частотник предполагается эксплуатировать в трехфазной сети, то автомат также должен быть трехфазным, с общим рычагом. В этом случае при коротком замыкании на одной из фаз можно оперативно отключить и другие фазы.

Ток срабатывания должен обладать характеристиками, полностью соответствующими току отдельной фазы электродвигателя. Если частотный преобразователь планируется использовать в однофазной сети, в этом случае рекомендуется воспользоваться одинарным автоматом, номинал которого должен в три раза превышать ток одной фазы. Независимо от количества фаз, при установке частотника, автоматы не должны включаться в разрыв заземляющего или нулевого провода. Рекомендуется использовать только прямое подключение.
При правильной настройке и подключении частотного преобразователя, его фазные провода должны соединяться с соответствующими контактами электродвигателя. Предварительно обмотки в двигателе соединяются по схеме «звезда» или «треугольник», в зависимости от напряжения, выдаваемого преобразователем. Если оно совпадает с меньшим значением, указанным на корпусе двигателя, то применяется соединение треугольником. При более высоком значении используется схема «звезда».

Далее выполняется подключение частотного преобразователя к контроллеру и пульту управления, который входит в комплект поставки. Все соединения осуществляются в соответствии со схемой, приведенной в руководстве по эксплуатации. Рукоятка должна находиться в нейтральном положении, после чего включается автомат. Нормальное включение подтверждается световым индикатором, загорающимся на пульте. Для того чтобы преобразователь заработал, нажимается кнопка RUN, запрограммированная по умолчанию.
После незначительного поворота рукоятки, двигатель начинает постепенно вращаться. Для переключения вращения в обратную сторону, существует специальная кнопка реверса. Затем с помощью рукоятки настраивается нужная частота вращения. На некоторых пультах вместо частоты вращения электродвигателя, отображаются данные о частоте напряжения. Поэтому рекомендуется заранее внимательно изучить интерфейс установленной аппаратуры.
Частотные преобразователи для асинхронных двигателей
Благодаря частотным преобразователям, работа современных асинхронных двигателей отличается высокой эффективностью, устойчивостью и безопасностью. Это особенно важно, поскольку каждый электродвигатель отличается индивидуальными особенностями режима работы. Поэтому оптимизации параметров питания агрегатов с использованием преобразователей частоты придается большое значение. Когда частотный преобразователь выбирается для каких-либо конкретных целей, в этом случае должны обязательно учитываться его рабочие параметры.

Нормальная работа устройства будет зависеть от типа электродвигателя, его мощности, диапазона, скорости и точности регулировок, а также от поддержания стабильного момента вращения вала. Эти показатели имеют первостепенное значение и должны органично сочетаться с габаритами и формой аппарата. Следует обратить особое внимание на то, как расположены элементы управления и будет ли удобно им пользоваться.
Выбирая устройство, необходимо заранее знать, в каких условиях оно будет эксплуатироваться. Если сеть однофазная, то и преобразователь должен быть таким же. То же самое касается и трехфазных аппаратов. Многое зависит от мощности асинхронных двигателей. Если при запуске на валу необходим высокий пусковой момент, то и частотный преобразователь должен быть рассчитан на большее значение тока.
electric-220.ru
Преобразователи частоты для асинхронных двигателей
До появления частотных преобразователей на рынке современной энергетики, электромонтёрам приходилось применять для подключения асинхронного двигателя стартовый или фазосдвигающий конденсатор большой ёмкости.
Двигатель при этом работал, но существенно терял мощность. Также, применение конденсаторов сильно разогревало обмотки двигателя, что сильно снижало его ресурс работы, и двигатели часто приходилось «перематывать». Учитывая, что обмотки асинхронного двигателя делаются из медной проволоки, то такие ремонты приносили большой ущерб.
Так как асинхронный двигатель является составной частью почти каждого современного привода, то вопрос создания частотного регулирования вставал на особый уровень. И вот, частотники уже повсеместно применяются для подключения электрического двигателя к сети и его управление.
По сути, частотный инвертор, это прибор, изменяющий частоту поданного на обмотки напряжения с ШИМ-регулированием. Благодаря частотнику, получилось подключить асинхронный двигатель к сети без ущерба его ресурсу, без перегрева, и ещё дать массу возможностей по управлению скоростью вращения вала.
Также, применяя различные интерфейсы передачи данных и команд, применение частотников позволило объединить все приводы большого предприятия в одно диспетчерскую систему управления и контроля параметров.
В мир современной автоматизации технологических процессов, это весомый аргумент.
Устройство частотных преобразователей
Современный частотный инвертер состоит из двух принципиальных блоков. Первый блок полностью сглаживает напряжение и на выходе выдаёт постоянное. Постоянное напряжение подаётся на силовой блок генерации частоты. После преобразования, на выходе из второго блока частота напряжения уже будет такая, какая задана настройкой.
За возможность изменять частоту напряжения отвечает микропроцессор, который встроен в частотник. Используя заданную программу, процессор следит за выходной частотой напряжения, а также за параметрами работы электрического двигателя.
По сути, частотные преобразователи для асинхронных двигателей принцип работы которых заключён в простом вырабатывании нужной частоты переменного тока, это модуляторы нужной природы напряжения, которая необходима для того или иного оборудования. Именно это и снизило негативное влияние на работу электрического двигателя, которое имело место быть при использовании конденсатов.
Электрический двигатель получает именно такое напряжение, которое положено ему для нормальной и полноценной работы.
Считаем нужным отметить, что и при наличии линии трёхфазного напряжения, не всегда рационально подключать электрический двигатель к сети просто через выключатель. В таком случае, двигатель будет работать, но регулировать его работу не получится. Не получится и следить за состоянием обмоток.
В промышленном исполнении можно встретить два основных типа частотных преобразователей:
- Специальные.
- Универсальные.
Специальный частотный преобразователь для асинхронного двигателя, схема которого несколько отличается от универсального, изготавливается под конкретное оборудование по конкретным потребностям. Как правило, это очень урезанные версии, не способные на работу с любым оборудованием.
Универсальные частотные инвертера могут работать, как и в специальном оборудовании, так и во всех остальных вариантах применения. На то они и универсальные, что их можно настраивать и программировать под любые нужды.
Поэтому, выбор частотного преобразователя для асинхронного двигателя должен быть не столько продиктован конкретными необходимостями производства, но и возможностью модернизации оборудования.
Практически во всех частотниках сегодня реализована возможность установки и контроля режима работы электрического двигателя с пульта управления. Первый интерфейс управления встроен в сам корпус частотника. Там же есть и ручка регулирования скорости вращения двигателя.
Но можно и применять выносные пульты управления. Которые можно располагать как в диспетчерской, так и непосредственно на станке, который приводится в движение электрическим двигателем.
Такое чаще встречается в ситуациях, когда станок с двигателем находится в помещении, где не рекомендуется установка частотного инвертора. И его устанавливают вдали от оборудования.
Большая часть инвертеров частоты позволяют программировать работу оборудования. Но, задать программу просто с пульта управления не получится. Для этого используется интерфейс передачи данных и настройки, который, при помощи компьютера позволяет задать нужную программу работы.
Разница типов сигналов управления
При проектировании цеха очень важно учитывать, что общение частотных преобразователей с диспетчерским пультом будет происходить при помощи электрических импульсов по проводам связи. Пи этом, не стоит забывать, что разные стандарты связи по-разному влияют друг на друга. Посему, переда данных одним способом, может существенно снижать качество передачи данных другим способом.
Поэтому, расчет частотного преобразователя для асинхронного двигателя должен производиться не только по его электротехническим показателям, но и по показателям совместимости с сетью.
Выбор мощности частотного преобразователя
Вопрос мощности частотника, скорее всего, стоит на первом плане, при расчете привода для любого станка или агрегата. Дело в том, что большинство частотных инвертеров способны выдерживать большие перегрузки до 200 – 300 %. Но, это совсем не означает, что для питания электрического двигателя можно смело покупать частотник сегментом ниже, чем требуется по планированию.
Выбор мощности частотного преобразователя осуществляется с обязательным запасом в 20 – 30%. Игнорирование этого правила может повлечь за собой выход из строя частотного преобразователя и простой оборудования.
Также важно учитывать пиковые нагрузки, которые может выдерживать частотник. Дело в том, что при старте электрического двигателя его пусковые токи могут сильно превышать номинальные. В некоторых случаях, пусковой ток превышает номинальный в шесть раз! Частотик должен быть рассчитан на такие изменения.
Каждый электрический двигатель оборудован вентилятором охлаждения. Это лопасти, которые установлены в задней части двигателя и по мере вращения вала прогоняют через корпус мотора воздух.
Если электрический двигатель работает на пониженных оборотах, то мощности потока воздуха может не хватить для охлаждения.
В этом случае, нужно выбирать частотник с датчиками температуры двигателя. Или организовать дополнительное охлаждение.
Электромагнитная совместимость преобразователей частоты
При расчёте и подключении частотника к сети и электрическому двигателю, следует помнить, что он очень подвержен помехам. Также, преобразователь частоты может и сам стать источником помех для другого оборудования. Именно поэтому, все подключения к частотнику и от него выполняются экранированными кабелями и выдерживанием дистанции в 10 см друг от друга.
По своей сути, применение частного преобразователя для питания асинхронного электрического двигателя позволило существенно продлить жизнь электрического двигателя, дало возможность регулировать работу двигателя и хорошо экономить на расходе электрической энергии.
Частотник, частотный преобразователь1ф 220 — 3ф220 для асинхронного электродвигателя
Watch this video on YouTube
chistotnik.ru
Частотный преобразователь
27.05.2019Частотный преобразователь напряжения — это электрический прибор, служащий для преобразования напряжения и частоты переменного тока в напряжение с заданной амплитудой и частотой. Он также способен преобразовывать постоянное напряжение в переменное с заданными характеристиками.
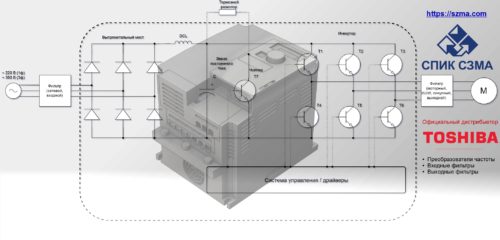 Частотные преобразователь Toshiba
Частотные преобразователь Toshiba
Для чего нужен частотный преобразователь?
Этот вопрос задают множество людей, которым впервые понадобилось подключить трехфазный двигатель насоса или вентилятора. Конечно, любой электродвигатель можно напрямую подключить к сети переменного тока через соответствующую защитную аппаратуру (моторный автоматический выключатель или контактор с тепловым реле).
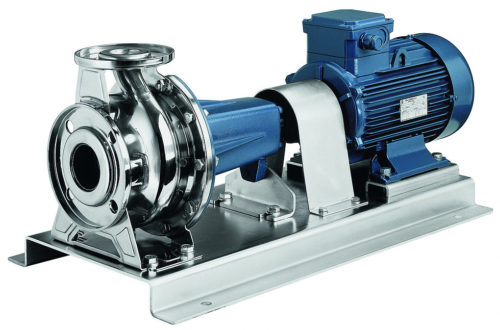 Насос водяной
Насос водяной
 Канальный вентилятор
Канальный вентилятор
Рассмотрим процессы, происходящие в электродвигателе в момент прямого пуска с помощью автоматического выключателя или кнопки включения контактора на примере обычного трехфазного асинхронного двигателя.
На статорные обмотки электродвигателя подается переменное напряжение, которое генерирует соответствующее электромагнитное поле этих обмоток. Это поле, направленное в сторону ротора, в свою очередь заставляет генерироваться электрический ток в короткозамкнутых витках ротора. Затем ток в обмотках ротора генерирует ответное магнитное поле, которое и приводит к движению ротора относительно статора. Все эти процессы, возникающие в момент пуска, называются процессом намагничивания статора и ротора.
 Асинхронный электрический двигатель
Асинхронный электрический двигатель
Трехфазный электродвигатель сам по себе не нужен: на его валу обязательно присутствует нагрузка (самая простая – в виде лопастей вентилятора). В ситуации с нагруженным конвейером всё сложнее. Тем не менее, у этой нагрузки есть момент инерции – момент, который необходимо преодолеть двигателю для запуска вращения вала. Таким образом, все эти электромагнитные и механические силы в момент пуска напрямую соотносятся с обычным пусковым током двигателя. Как несложно догадаться, этот ток будет в несколько раз (2-7) больше номинального тока двигателя, который получится в установившемся режиме работы.
Скорость вращения электродвигателя или число оборотов в минуту
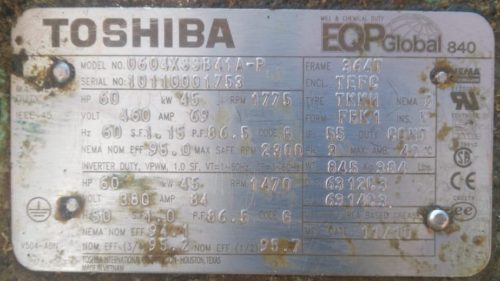
Скорость вращения вала как асинхронных, так и синхронных электродвигателей определяется частотой вращения магнитного поля статора. Магнитное поле вращается соответственно подаваемому на обмотки статора переменному току по трем фазам. Именно это «вращение» электрического тока в статоре приводит к вращающемуся магнитному полю и определяется по формуле:
n = (60 • f / p) • (1 – s)
где n – номинальное число оборотов вала асинхронного электродвигателя, p – число пар полюсов (см. на паспортной табличке), s – скольжение (разность скоростей поля ротора и поля статора), f – частота переменного тока (например, 50 Гц). Число пар полюсов статора зависит от конструкции катушек статора. Скольжение зависит от нагрузки на валу электродвигателя. Таким образом, подключив электродвигатель к сети переменного тока, мы получим вращение с постоянной скоростью.
Зачем нужно регулировать скорость и как это делается?
Заданное в паспортной табличке число оборотов двигателя на 1 минуту не всегда устраивает потребителя. Иногда скорость механизма хочется уменьшить, а давление в трубе наоборот поднять. Возникает потребность в изменении частоты вращения вала электродвигателя. Как видно из формулы выше, наиболее простой способ изменения частоты вращения вала электродвигателя –изменить частоту переменного тока f.
szma.com
Асинхронный преобразователь частоты
Существует возможность использовать асинхронный двигатель с фазным ротором как асинхронный преобразователь частоты (АПЧ), так как известно частота тока ротора пропорциональна частоте тока статора, а коэффициент пропорциональности – скольжение. С помощью таких преобразователей из промышленной частоты 50 Гц обычно получают 100, 200 Гц.

Схема подключения АПЧ выглядит следующим образом

Статорная обмотка подключается к питающей сети с частотой тока f1. Ток с частотой f2 получают с концов обмотки ротора, где он передается через контактные кольца и щетки.
Для преобразования частоты необходим приводной двигатель (ПД), который механически связан с ротором АПЧ. Таким двигателем может быть асинхронный или синхронный двигатель, если требуется задать определенную частоту, а может быть двигатель постоянного тока, если требуется осуществлять плавную регулировку частоты тока.
Если ротор преобразователя вращать против направления вращения магнитного поля статора (то есть в режиме противовключения), то скольжение s>1, исходя из этого, частота получаемого тока будет больше частоты статора f2>f1. Если изменить направление вращения приводного двигателя, то скольжение s<1 (работа в двигательном режиме), а частота получаемого тока f2<f1.
Частоту f2 можно рассчитать по формуле

Следует понимать, что при вращении ротора АПЧ со скоростью вращения больше синхронной, s>1, а значит, в числителе вышеприведенной формулы должен стоять знак плюс. В случае, когда скольжение s<1 знак минус.
Электрическая мощность на выходе АПЧ представляет собой сумму электромагнитной мощности передаваемой от статора АПЧ и механическую мощность, передаваемую от приводного двигателя.

Коэффициент полезного действия такой системы не большой, так как он является произведением КПД приводного двигателя и асинхронного преобразователя частоты.

Читайте также — Асинхронный генератор
electroandi.ru
Правда о пяти мифах частотно регулируемого привода.
Знание принципов работы частотно регулируемого привода (ЧРП) может упростить процесс выбора преобразователя частоты.
Автор: Пол Эйвери, Yaskawa America Inc.
Независимо от того, насколько давно и каким образом, уже обыденные частотные преобразователи пришли в Вашу жизнь, где-то есть тот, кто впервые стукнулся с ЧРП или только рассматривает возможность их применения. Вспомните, когда вы впервые задумались о применении одного из современных частотных преобразователей с широтно-импульсной модуляцией для двигателя переменного тока. Скорее всего, у вас, на тот момент, было не совсем верное представление об их возможностях и назначении. В этой статье мы рассмотрим и постараемся развеять пять распространенных мифов о частотно регулируемом приводе.

Рис. 1. Частотный преобразователь
Миф № 1: Выходной сигнал частотного преобразователя является синусоидальным
Людям, так или иначе связанные с эксплуатацией электродвигателей в, как правило, знакома работа асинхронных двигателей переменного тока с использованием пускателей. При пуске электродвигателя, пускатель замыкает контакты обмоток электродвигателя с фазами 3-х фазной питающей сети. Напряжение каждой фаза представляет собой синусоидальную волну. Приложенное напряжение создает на клеммах электродвигателя тоже синусоидальной формы с той же частотой (можно убедится проверкой напряжения на клеммах электродвигателя). Пока вроде всё просто и понятно.
А вот что происходит на выходе преобразователя частоты, это совсем другая история. Частотный преобразователь обычно выпрямляет входное трехфазное переменное в постоянное напряжение, которое фильтруется и аккумулируется при помощи больших конденсаторов звена постоянного тока. Напряжение звена постоянного тока затем инвертируется, для получения переменного напряжения, переменной частоты на выходе. Процесс инверсии осуществляется посредством трех изолированных биполярных транзисторов (IGBT) с двумя изолированными затворами — по одной паре на выходную фазу (см. Рис 2). Поскольку выпрямленное напряжение инвертируется в переменное, выходное звено называют «инвертором». Включение, выключение, а также длительность нахождения IGBT-транзисторов в положении ВКЛ или ВЫКЛ может управляться, что и определяет значение частоты выходного напряжения. Отношение выходного среднеквадратического напряжения к выходной частоте определяет магнитный поток, развиваемый в электродвигателе переменного тока. Когда выходная частота увеличивается, выходное напряжение также должно увеличиваться с той же скоростью, чтобы поддерживать постоянство отношения и, следовательно, постоянную скорость вращения двигателя. Обычно соотношение между напряжением и частотой поддерживается по линейному закону, что обеспечивает возможность поддержания постоянного крутящего момента.

Рис. 2. Схема инвертора с IGBT транзисторами.
Результирующий сигнал напряжения, прикладываемый к обмотке двигателя, не является синусоидальным (см. Рис. 3). Обратите внимание, что иногда отношение напряжения по частоте (V / f) может быть отличным от линейного, что характерно для вентиляторов, насосов или центробежных нагрузок, которые не требуют постоянного крутящего момента, но обеспечивают тем самым возможность экономии электроэнергии.

Рис. 3. Форма сигнала ШИМ напряжения на выходе частотного преобразователя
Как же отразится пилообразная форма питающего напряжения на работе электродвигателя. Асинхронный двигатель является по своей сути большой катушкой индуктивности. А характерной особенностью индукции является ее устойчивость к изменениям тока. Увеличивается или уменьшается сита ток, индукция будет выступать против этого изменения. Какое же это имеет отношение к форме сигнала напряжения ШИМ на рисунке 3? Вместо того, чтобы позволить импульсу тока увеличиваться в том же порядке, что и приложенный импульс напряжения, ток начнет медленно возрастать. Когда импульс напряжения закончился, ток плавно уменьшается, а не исчезает мгновенно. В общих чертах это происходит следующим образом: до момента, когда ток снизился до нуля, поступает следующий импульс напряжения, и ток начинает плавно увеличиваться. Если последующий импульс становятся шире, ток плавно достигает большего значения, чем раньше. В конце концов, текущий сигнал становится синусоидальным, хотя и с некоторыми зубчатыми переходами (см. Рис. 4).

Рис. 4. Форма сигнала тока на выходе частотного преобразователя
Однако не думайте, что вы можете подключить свой соленоид к фазам выходного напряжения ЧРП. Это всё же не совсем переменное напряжение.
Миф № 2: все частотные преобразователи одинаковы
В общем виде частотно-регулируемый привод сегодня является довольно зрелым продуктом. Большинство коммерчески доступных приводов содержат одни и те же базовые компоненты: мостовой выпрямитель, блок питания, конденсаторный блок постоянного тока и плата выходного инвертора. Разумеется, существуют различия в алгоритмах управления переключением транзисторов IGBT инвертора, надежности компонентов и эффективности схемы теплового рассеивания. Но основные компоненты остаются прежними.
Есть также исключения. Например, в некоторых ЧРП инвертер имеет три вывода. Такая схема позволяет выходным импульсам варьироваться от половинного до полного импульса сигнала напряжения (см. Рис. 5).

Рис. 5. Трехуровневый выходной сигнал напряжения
Для достижения трехуровневого выходного сигнала звено инвертора должно иметь в два раза больше выходных переключателей, а также запирающих диодов (см. Рис. 6). Преимущества трехуровневой схемы заключается в уменьшении перенапряжения на двигателе из-за гармонических волн, снижении синфазных помех, а также снижении паразитных токов на валах и подшипниках.

Рис. 6. Схема трехуровневого инвертора
Матричный инвертор является еще более нетипичным типом ЧРП. Частотные преобразователи с матричными инверторами не имеют шины постоянного тока или мостового выпрямителя. Вместо этого они используют двунаправленные переключатели, которые могут подключать любое из входящих фазных напряжений к любой из трех выходных фаз (см. Рис. 7). Преимущество этой схемы заключается в том, что мощность может свободно протекать от сети к двигателю или от двигателя к сети для рекуперативного привода постоянного тока. Недостатком является то, что на входе необходима установка фильтра, для обеспечения дополнительной индуктивности и фильтрации формы ШИМ, чтобы исключить негативное влияние на питающую сеть.

Рис. 7. Схема матричного ЧРП
Кроме частотных преобразователей с трехуровневыми выходами и инверторами матричного типа существуют также и другие типы частотно-регулируемых приводов. Таким образом миф о том, что все частотные преобразователи одинаковые развеян.
Миф № 3: Частотный преобразователь компенсирует коэффициентом мощности.
Нередко можно увидеть, что производители частотных преобразователей заявляют значение коэффициента мощности, например, равным 0,98 или почти 1. Действительно коэффициент мощности несколько улучшается после установки ЧРП перед асинхронным двигателем. ЧРП компенсирует реактивную мощность за счет конденсаторного звена. Однако полностью компенсировать фазовый сдвиг преобразователь частоты не может.
Полный коэффициент мощности должен включать реактивную мощность, вызываемую гармониками, создаваемыми в звене постоянного тока. Причиной является работа диодного моста. Важно помнить, что диод работает только тогда, когда напряжение на стороне анода выше, чем напряжение на стороне катода (прямое смещение). Это означает, что диоды открыты только на пике каждой временной фазы как положительной, так и отрицательной частей синусоидальной волны. Это приводит к волнообразной форме волны. Это также приводит к искажению входного тока и прерыванию (см. Рис. 8).

Рис. 7. Форма сигналов после выпрямителя
Чтобы вычислить истинный полный коэффициент мощности (PF), необходимо учесть эффекты гармоник. Следующее уравнение показывает, как гармоники влияют на полный коэффициент мощности:

где THD = суммарное гармоническое искажение
Для прерывистого сигнала входного тока в уравнении THD будет находиться в районе 100% или более. Подставляя это в уравнение, получаем истинный коэффициент мощности PF ближе к 0,71, по сравнению с заявленным 0,98, который не учитывает гармоники.
Но не всё так плохо. В настоящее время существует множество способов гармонические искажения, создаваемые в звене постоянного тока. Они используют как пассивные, так и активные методы подавления искажений входного сигнала. Так, например, вышеупомянутый матричный преобразователь частоты является примером активного метода подавления гармонических искажений.
Миф № 4: С частотным преобразователем Вы можете эксплуатировать двигатель на любой скорости.
Особенность применения частотных преобразователей заключается, что они могут изменять как напряжение, так и частоту выходного сигнала. Благодаря возможности обеспечения требуемой скорости вращения электродвигателя ЧРП нашли широкое применение во всех сферах экономики и всех отраслях промышленности ЧРП может легко выдавать сигнал любой частоту в пределах предусмотренного изготовителем диапазона регулирования. Однако необходимо учитывать, что частотный преобразователь работает в составе электродвигателя в реальных условиях. Технологические требования, такие как необходимый крутящий момент, охлаждение, требуемая мощность так или иначе ограничивают фактический диапазон регулирования преобразователя частоты.
Ограничение № 1. С точки зрения охлаждения электродвигателя, низкая скорость вращения — это не очень хорошая идея. В частности, полностью закрытые вентиляторные (TEFC) двигатели имеют охлаждаются только за счет внутреннего вентилятора, который вращается вместе с валом двигателя. Чем медленнее скорость вращения двигатель, тем меньше поток воздуха и тем хуже охлаждение. Закрытые двигатели обычно не рекомендуются эксплуатировать с частотой ниже 15 Гц (диапазон скоростей 4:1).
Ограничение № 2: Электродвигатели имеют определенные ограничения диапазона скоростей, связанные с механическими и динамическими ограничениями нагрузок вращающихся частей. Обычно эта скорость называется максимальной безопасной частотой вращения. Данная характеристика не всегда указывается на шильдике мотора.
Ограничение № 3: При достижении максимальной частоты вращения крутящий момент двигателя может снижаться. Это ограничение скорости связано с ограничением мощности, которое включает в себя скорость вращения и крутящий момент. Если быть еще точнее, что будет снижаться напряжения ЧРП. Обратите внимание, что вращение двигателя также генерирует собственное напряжение, называемое обратной электродвижущей силой (ЭДС), которое увеличивается со скоростью. Обратная ЭДС создается двигателем, чтобы противостоять приложенному напряжению от ПЧ. На более высоких скоростях ПЧ должен подавать еще большее напряжения, чтобы преодолеть обратную ЭДС, и ток мог протекать по обмоткам двигателя, создавая крутящий момент. После определенного максимального значения преобразователь частоты не может преодолеть обратную ЭДС электродвигателя, и, следовательно, крутящий момент двигателя уменьшается, что, в свою очередь, снижает скорость. Снижение скорости опять приводит к более низкой обратной ЭДС, которая, в свою очередь, позволяет протекать току в двигатель снова. Существует точка равновесия, в которой двигатель достигает максимальной скорости при максимальном крутящем моменте.
Как упоминалось выше ЧРП может создавать крутящий момент на двигателе, сохраняя постоянство отношения V/f (см. Рис. 9).

Рис. 9. График зависимости напряжения от частоты.
Когда частота выходного сигнала увеличивается, напряжение увеличивается линейно. Проблема возникает, когда частота превышает номинальную частоту двигателя. Помимо номинальной частоты, не может увеличиваться выходное напряжение, что соответственно приводит к уменьшению отношения V / f. Отношение V / f является мерой напряженности магнитного поля в двигателе и влияет на его крутящий момент. Следовательно, способность мотора создавать номинальный крутящий момент при частоте выше номинальной должна уменьшаться со скоростью 1 / частота, при этом произведение крутящего момента и частоты, равное мощности, является постоянным. Область работы над номинальной частотой называется постоянным диапазоном мощности, а работа на скоростях ниже номинальной — диапазоном постоянного крутящего момента (см. Рис. 10).

Рис. 10. Графики зависимости мощности и крутящего момента электродвигателя от частоты.
Миф № 5: Входной ток преобразователя частоты выше выходного тока
Возможно, это не миф, а недоразумение. Некоторые пользователи ПЧ измеряют значение выходного и входного тока с помощью измерительного инструмента или с помощью мониторов ПЧ и обнаруживают, что входной ток намного ниже выходного. Это похоже не согласуется с идеей о том, что частотный преобразователь должен иметь некоторые потери и поэтому вход всегда должен быть немного выше, чем выход. Концепция правильная, но она учитывает мощность, а не ток, который следует учитывать:

Входное напряжение всегда находится под напряжением переменного тока. Выходное напряжение изменяется со скоростью по образцу V / f. На самом деле компоненты уравнения немного сложнее. Но ключом к пониманию данного процесса является знание того, что асинхронный двигатель имеет два токовых компонента: один отвечает за создание магнитного поля в двигателе, которое необходимо для вращения двигателя; а второй — ток, создающий крутящий момент, который, как следует из названия, отвечает за создание крутящего момента.
Привод потребляет входной ток, пропорциональный активному крутящему моменту двигателя. Ток, необходимый для создания магнитного поля, обычно не изменяется со скоростью и обеспечивается основными конденсаторами звена постоянного тока, которые заряжаются при включении питания ПЧ. При малых значения крутящего момента выходной ток может быть намного выше, чем входной, поскольку входной ток отражает только составляющую, создающую крутящий момент плюс некоторые гармоники, но не включает ток намагничивания. Ток намагничивания циркулирует между конденсаторами шины постоянного тока и двигателем. Даже при полной нагрузке входной ток обычно будет ниже, чем ток двигателя, поскольку на входе по-прежнему нет составляющей тока намагничивания.
Помните, что в уравнении мы сравниваем входную и выходную мощности. Например, рассмотрим полностью нагруженный двигатель, вращающийся на низких оборотах. Входное напряжение номинальное, а выходное напряжение будет низким из-за низкой скорости вращения. Выходной ток в данном случае будет высокий из-за полной нагрузки на двигатель. А чтобы сбалансировать уравнение мощности, входной ток должен быть ниже выходного тока.
Узнать подробную информацию о частотных преобразователях, ознакомиться с производственной линейкой YASKAWA Вы можете у нашего партнера — ООО «КоСПа»
Или в соответствующем разделе преобразователя YASKAWA
Оригинал статьи: https://www.yaskawa.com/about-us/media-center/industry-articles-display?articleId=2167778
27.07.2017
www.chastotnik.pro
Частотник для трехфазного электродвигателя-принцип работы
Создание трёхфазного асинхронного электродвигателя пришлось на конец XIX века. С тех пор, никакие промышленные работы не являются возможными без его использования. Наиболее значимый момент в рабочем процессе — плавный пуск и торможение двигателя. Это требование в полной мере выполняется при помощи частотного преобразователя.
Существует несколько вариантов названий частотника для трёхфазного электродвигателя. В том числе, он может называться:
- Инвертором;
- Преобразователем частоты переменного тока;
- Частотным преобразователем;
- Частотно регулируемым приводом.
С помощью инвертора осуществляется регуляция вращательной скорости асинхронного электродвигателя, предназначенного для преобразования электрической энергии в механическую. Осуществляемое при этом движение можно трансформировать в движение другого типа.
Специально разработанная схема частотного преобразователя позволяет доводить КПД двигателя до уровня в 98%.
Наиболее значимо использование преобразователя в конструкции электрического двигателя большой мощности. Частотник позволяет осуществлять изменения пусковых токов и задавать для них требуемую величину.
Принцип работы частотного преобразователя
Использование ручного управления пускового тока чревато излишними энергозатратами и уменьшением срока эксплуатации электрического двигателя. При отсутствии преобразователя также наблюдается превышение номинального значения напряжения в несколько раз. Из-за работы в таком режиме, также наблюдается негативное влияние.
Кроме того, частотный преобразователь обеспечивает плавность управления функционированием двигателя, ориентируясь на балансировку значений напряжения и частоты, и снижает энергопотребление вдвое.
Весь приведённый перечень положительных моментов возможен благодаря принципу двойного преобразования напряжения. Действует он следующим образом:
- Сетевое напряжение регулируется через выпрямление и фильтрование в звене прямого тока.
- Выполнение электронного управления, которое формирует определённую частоту, в соответствии с предварительно обозначенным режимом, и трёхфазное напряжение.
- Происходит продуцирование прямоугольных импульсов с последующей корректировкой амплитуды при помощи обмотки статора.
Как правильно подобрать преобразователь частот
Наиболее значимо при покупке частотника — не жалеть денег. В случае с преобразователем, дешёвый всегда означает малофункциональный, а это делает покупку бесполезной.
Также следует обратить внимание на тип управления преобразователя:
Высокоточная установка величины тока.
Рабочий режим ограничен заданным выходным соотношением частоты и напряжения. Данный тип управления уместен только для бытовых приборов простейшего типа.
Далее следует обратить внимание на мощность преобразователя частоты. Тут всё просто: чем больше, тем лучше.
Питающая сеть должна обеспечивать достаточно широкий диапазон напряжений. Это снижает риск поломки при резких скачках. Чрезмерно высокое напряжение может спровоцировать взрыв конденсаторов.
Показатели частоты должны удовлетворять производственным потребностям. Их нижний порог определяет широту возможностей для управления приводной скорости. Максимальный частотный диапазон возможен только при векторном управлении.
Число входящих/выходящих управляющих разъёмов должно быть немного больше минимально необходимого. Но это, конечно, отражается на повышении цены и возникновении затруднений при установке устройства.
Наконец, требуется обратить внимание на совпадение характеристик управляющей шины и параметров частотника. Это определяется по соответствию числа разъёмов.
Важно отметить способность переносить перегрузки. Запас мощности преобразователя частоты должен на 15% превосходить мощность двигателя.
Комплектация регулируемого привода
Частотный преобразователь формируется из трёх компонентов:
- Управляемый, либо неуправляемый выпрямитель, отвечающий за формирование напряжения ПТ (постоянного тока), поступающего от питания.
- Фильтр (в виде конденсатора), осуществляющий дополнительное сглаживание напряжения.
- Инвертор, моделирующий напряжение нужной частоты.
Самостоятельное подключение преобразователя
Перед тем, как приступать к подключению устройства следует воспользоваться обесточивающим автоматом, он обеспечит отключение всей системы в случае короткого замыкания на любой из фаз.
Существует две схемы соединения электродвигателя с частотным преобразователем:
- «Треугольник».
Схема актуальна, если требуется управлять однофазным приводом. Уровень мощности преобразователя в схеме при этом составляет до трёх киловатт, а мощность не теряется.
- «Звезда».
Способ, подходящий для подключения клемм трёхфазных частотников, питаемых промышленными трёхфазными сетями.
На рисунке схема подключения частотника 8400 Vector
Для ограничения пускового тока и снижения пускового момента при запуске электрического двигателя по мощности превосходящего 5 кВт, применяется переключение «звезда-треугольник».
Когда на статор пускается напряжение, то фигурирует подключение устройства по типу «звезда». Как только значение скорости двигателя начинает соответствовать номинальному, поступление питания осуществляется по схеме «треугольник». Но этот приём используется, только когда технические возможности позволяют подключаться по двум схемам.
В объединённой схеме «звезды» и «треугольника» наблюдаются резкие скачки токов. При переходе на второй тип подключения показания по вращательной скорости значительно уменьшаются. Для восстановления прежнего режима работы и частоты оборотов следует осуществить увеличение силы тока.
Наиболее активно применяются частотники в конструкции электрического двигателя с уровнем мощности 0,4 — 7,5 кВт.
Сборка преобразователя частот своими руками
Одновременно с промышленным производством частотных преобразователей, остаётся актуальной сборка подобного устройства своими руками. Особенно этому способствует относительная простота процесса. В результате работы инвертора производится преобразование одной фазы в три.
Применение в бытовых условиях электрических двигателей, имеющих в комплектации подобное устройство, не вызывает никаких дополнительных затруднений. Поэтому можно смело браться за дело.
На рисунке структурная схема частотных преобразователей со звеном постоянного тока.
Схемы частотного преобразователя, используемые при сборке, состоят из выпрямительного блока, фильтрующих элементов (отвечающих за отсечение переменной составляющей тока и конструируемых из IGBT-транзисторов). По стоимости покупка отдельных компонентов преобразователя и выполнение сборки своими руками обходится дешевле, чем приобретение готового устройства.
Применять самосборные частотные преобразователи можно в электродвигателях имеющих мощность 0,1 — 0,75 кВт.
В то же время, современные заводские частотники имеют расширенную функциональность, усовершенствованные алгоритмы и улучшенный контроль безопасности рабочего процесса ввиду того, что при их производстве используются микроконтроллеры.
Сферы применения преобразователей:
- Машиностроение;
- Текстильная промышленность;
- Топливно-энергетические комплексы;
- Скважинные и канализационные насосы;
- Автоматизация управления технологическим процессом.
Стоимость электродвигателей находится в прямой зависимости от того, есть ли в его комплектации преобразователей.
Самодельный частотный преобразователь 220-380V собственной сборки
Watch this video on YouTube
chistotnik.ru
Частотный преобразователь
Дмитрий Левкин
Частотный преобразователь, или преобразователь частоты — электротехническое устройство (система управления), используемое для контроля скорости и/или момента двигателей переменного тока путем изменения частоты и напряжения питания электродвигателя.Согласно ГОСТ 23414-84 полупроводниковый преобразователь частоты — полупроводниковый преобразователь переменного тока, осуществляющий преобразование переменного тока одной частоты в переменный ток другой частоты
Частотный преобразователь — это устройство, используемое для того чтобы обеспечить непрерывное управление процессом. Обычно частотный преобразователь способен управлять скоростью и моментом асинхронных и/или синхронных двигателей.

Частотный преобразователь небольшой мощности

Высоковольтный преобразователь
Преобразователи частоты находят все более широкое применение в различных приложениях промышленности и транспорта. Благодаря развитию силовых полупроводниковых элементов, инверторы напряжения и инверторы тока с ШИМ управлением получают все более широкое распространение. Устройства, которые преобразуют постоянный сигнал в переменный, с желаемым напряжением и частотой, называются инверторами. Такое преобразование может быть осуществлено с помощью электронных ключей (BJT, MOSFET, IGBT, MCT, SIT, GTO) и тиристоров в зависимости от задачи.
На данный момент основная часть всей производимой электрической энергии в мире используется для работы электрических двигателей. Преобразование электрической мощности в механическую мощность осуществляется с помощью электродвигателей мощностью от меньше ватта до нескольких десятков мегаватт.
- Современные электроприводы должны отвечать различным требованиям таким как:
- максимальный КПД;
- широкий диапазон плавной установки скорости вращения, момента, ускорения, угла и линейного положения;
- быстрое удаление ошибок при изменении управляющих сигналов и/или помех;
- максимальное использование мощности двигателя во время сниженного напряжения или тока;
- надежность, интуитивное управление.
Основными элементами частотного преобразователя являются силовая часть (преобразователь электрической энергии) и управляющее устройство (контроллер). Современные частотные преобразователи обычно имеют модульную архитектуру, что позволяет расширять возможности устройства. Также зачастую имеется возможность установки дополнительных интерфейсных модулей и модулей расширения каналов ввода/вывода.


Функциональная схема частотного преобразователя
На микроконтроллере частотного преобразователя выполняется программное обеспечение, которое управляет основными параметрами электродвигателя (скоростью и моментом). Основные методы управления бесщеточными двигателями, используемые в частотных преобразователях представлены в таблице ниже.
Характеристики основных способов управления электродвигателями используемых в частотных преобразователях [3]Примечание:
- Без обратной связи.
- С обратной связью.
- В установившемся режиме
Широкое развитие силовых электрических преобразователей в последние десятилетия привело к увеличению количества исследований в области модуляции. Метод модуляции непосредственно влияет на эффективность всей энергосистемы (силовой части, системы управления), определяя экономическую выгоду и производительность конечного продукта.
Главная цель методов модуляции – добиться лучшей формы сигналов (напряжений и токов) с минимальными потерями. Другие второстепенные задачи управления могут быть решены посредством использования правильного способа модуляции, такие как уменьшение синфазной помехи, выравнивание постоянного напряжения, уменьшение пульсаций входного тока, снижение скорости нарастания напряжения. Одновременное достижение всех целей управления невозможно, необходим компромисс. Каждая схема силового преобразователя и каждое приложение должны быть глубоко изучены для определения наиболее подходящего метода модуляции.
- Методы модуляции можно разделить на четыре основные группы:
- ШИМ — широтно-импульсная модуляция
- ПВМ — пространственно-векторная модуляция
- гармоническая модуляция
- методы переключения переменной частоты
Корни силовой электроники уходят к 1901 году, когда П.К. Хьюитт изобрел ртутный вентиль. Однако современная эра полупроводниковой силовой электроники началась с коммерческого представления управляемого кремниевого выпрямителя (тиристора) компанией General Electric в 1958 году. Затем развитие продолжалось в области новых полупроводниковых структур, материалов и в производстве, давая рынку много новых устройств с более высокой мощностью и улучшенными характеристиками. Сегодня силовая электроника строится на металл-оксид-полупроводниковых полевых транзисторах (MOSFET — metal-oxide-semiconductor field-effect transistor) и биполярных транзисторах с изолированным затвором (IGBT — Insulated-gate bipolar transistors), а для диапазона очень высоких мощностей — на тиристорах с интегрированным управлением (IGCT – Integrated gate-commutated thyristor). Также сейчас доступны интегрированные силовые модули. Новая эра высоковольтных, высокочастотных и высокотемпературных технологий открывается многообещающими полупроводниковыми устройствами, основанными на широкой запрещенной зоне карбида кремния (SiC). Новые силовые полупроводниковые устройства всегда инициируют развитие новых топологий преобразователей [3].
Инвертор напряжения
Инвертор напряжения наиболее распространен среди силовых преобразователей.
Двухуровневый инвертор напряжения
Двухуровневый инвертор напряжения (two-level voltage-source inverter) – наиболее широко применяемая топология преобразователя энергии. Он состоит из конденсатора и двух силовых полупроводниковых ключей на фазу. Управляющий сигнал для верхнего и нижнего силовых ключей связан и генерирует только два возможных состояния выходного напряжения (нагрузка соединяется с положительной или отрицательной шиной источника постоянного напряжения).

Схема двухуровневого инвертора напряжения

Фазное напряжение двухуровневого инвертора напряжения
Используя методы модуляции для генерирования управляющих импульсов возможно синтезировать выходное напряжение с желаемыми параметрами (формой, частотой, амплитудой). Из-за содержания высоких гармоник в выходном сигнале для генерирования синусоидальных токов выходной сигнал необходимо фильтровать, но так как данные преобразователи обычно имеют индуктивную нагрузку (электродвигатели) дополнительные фильтры используются только при необходимости.
Максимальное выходное напряжение определяется значением постоянного напряжения звена постоянного тока. Для эффективного управления мощной нагрузкой требуется высокое постоянное напряжение звена постоянного тока, но на практике это напряжение ограничено максимальным рабочим напряжением полупроводников. Для примера низковольтные IGBT транзисторы обеспечивают выходное напряжение до 690 В. Для того чтобы обойти данное ограничение по напряжению в последние десятилетия были разработаны схемы многоуровневых преобразователей. Данные преобразователи сложнее, чем двухуровневые в плане топологии, модуляции и управления, но при этом имеют лучшие показатели по мощности, надежности, габаритам, производительности и эффективности.
Трехуровневый преобразователь с фиксированной нейтральной точкой
В трехуровневом преобразователе с фиксированной нейтральной точкой (three-level neutral point clamped converter) постоянное напряжение делится поровну посредством двух конденсаторов, поэтому фаза может быть подключена к линии положительного напряжения (посредством включения двух верхних ключей), к средней точке (посредством включения двух центральных ключей) или к линии отрицательного напряжения (посредством включения двух нижних ключей). Каждому ключу в данном случае требуется блокировать только половину напряжения звена постоянного тока, тем самым позволяя увеличить мощность устройства, используя те же самые полупроводниковые ключи, как и в обычном двухуровневом преобразователе. В данном преобразователе обычно используются высоковольтные IGBT транзисторы и IGCT тиристоры.

Схема трехуровневого преобразователя с фиксированной нейтральной точкой
- Недостатками данных преобразователей являются:
- Дисбаланс конденсаторов, создающий асимметрию в преобразователе. Данную проблему предлагается решать путем изменения метода модуляции.
- Неравное распределение потерь из-за того, что потери на переключение внешних и центральных ключей отличаются в зависимости от режима работы. Данная проблема не может быть решена с использованием обычной схемы, поэтому была предложена измененная топология – активный преобразователь со связанной нейтральной точкой (active NPC). В этой схеме диоды заменены управляемыми ключами. Таким образом, выбирая соответствующую комбинацию ключей, возможно уменьшить и равномерно распределить потери.
- ГОСТ Р 50369-92 Электроприводы. Термины и определения.
- Rahul Dixit, Bindeshwar Singh, Nupur Mittal. Adjustable speeds drives: Review on different inverter topologies.- Sultanpur, India.:International Journal of Reviews in Computing, 2012.
- Marian P. Kazmierkowski, Leopoldo G. Franquelo, Jose Rodriguez, Marcelo A. Perez, Jose I. Leon, «High-Performance Motor Drives», IEEE Industrial Electronicsd, vol. 5, no. 3, pp. 6-26, Sep.2011.

Фазное напряжение трехуровневого преобразователя с фиксированной нейтральной точкой
Преобразователь с фиксированной нейтральной точкой может масштабироваться для достижения больше чем трех уровней выходного сигнала путем деления напряжения звена постоянного тока более чем на два значения посредством конденсаторов. Каждое из этих деленных напряжений может быть подключено к нагрузке с использованием расширенного набора ключей и ограничительных диодов. Вместе с увеличением мощности преимуществами многоуровневого преобразователя является лучшее качество электроэнергии, меньшее значение скорости нарастания напряжения (dv/dt) и связанных электромагнитных помех. Однако, когда преобразователь со связанной нейтральной точкой имеет более трех уровней, появляются другие проблемы. С точки зрения схемотехники в таком случае ограничительные диоды требуют более высокое максимальное рабочее напряжение чем основные ключи, что требует использования различных технологий или нескольких ограничительных диодов соединенных последовательно. В дополнение становится критическим неравномерное использование силовых элементов в схеме. В итоге из-за увеличения количества элементов снижается надежность. Приведенные недостатки ограничивают использование преобразователей с фиксированной нейтральной точкой с более чем тремя уровнями в промышленных приложениях.
Многоуровневые преобразователи
Каскадные преобразователи основанные на модульных силовых ячейках со схемой H-мост (cascaded H-bridge — CHB) и преобразователи с плавающими конденсаторами (flying capacitor converter) были предложены для обеспечения большего количества уровней выходного напряжения в сравнении с преобразователями с фиксированной нейтральной точкой.
Каскадный Н-мостовой преобразователь
Каскадный преобразователь — высоко модульный преобразователь, состоящий из нескольких однофазных инверторов, обычно называемыми силовыми ячейками, соединенными последовательно для формирования фазы. Каждая силовая ячейка выполнена на стандартных низковольтных компонентах, что обеспечивает их легкую и дешевую замену в случае выхода из строя.

Схема каскадного преобразователя
Основным преимуществом данного преобразователя является использование только низковольтных компонентов, при этом он дает возможность управлять мощной нагрузкой среднего диапазона напряжения. Несмотря на то что частота коммутации в каждой ячейке низкая, эквивалентная частота коммутации приложенная к нагрузке – высокая, что уменьшает потери на переключение ключей, дает низкую скорость нарастания напряжения (dv/dt) и помогает избежать резонансов.

Фазное напряжение каскадного преобразователя
Преобразователь с плавающими конденсаторами
Выходное напряжение преобразователя с плавающими конденсаторами получается путем прямого соединения выхода фазы с положительной, отрицательной шиной или подключением через конденсаторы. Количество уровней выходных напряжений зависит от количества навесных конденсаторов и отношения между различными напряжениями.

Схема преобразователя с плавающими конденсаторами
Этот преобразователь, как и в случае каскадного преобразователя, также имеет модульную топологию, где каждая ячейка состоит из конденсатора и двух связанных ключей. Однако, в отличие от каскадного преобразователя добавление дополнительных силовых ключей к конденсаторному преобразователю не увеличивает номинальную мощность преобразователя, а только уменьшает скорость нарастания напряжения (dv/dt), улучшая коэффициент гармоник выходного сигнала. Как и у каскадного преобразователя, модульность уменьшает стоимость замены элементов, облегчает поддержку и позволяет реализовать отказоустойчивую работу.

Фазное напряжение преобразователя с плавающими конденсаторами
Конденсаторный преобразователь требует только один источник постоянного тока для питания всех ячеек и фаз. Поэтому, можно обойтись без входного трансформатора, а количество ячеек может быть произвольно увеличено в зависимости от требуемой выходной мощности. Подобно преобразователю с фиксированной нейтральной точкой, этому преобразователю требуется специальный алгоритм управления для регулирования напряжения на конденсаторах.
Инвертор тока
Для работы инвертору тока всегда требуется управляемый выпрямитель, чтобы обеспечить постоянный ток в звене постоянного тока. В стандартной топологии обычно используются тиристорные выпрямители. Чтобы уменьшить помехи в нагрузке, в звене постоянного тока используется расщепленная индуктивность. Инвертор тока имеет схему силовых ключей наподобие инвертора напряжения, но в качестве силовых ключей используются тиристоры с интегрированным управлением (IGCT). Выходной ток имеет форму ШИМ и не может быть напрямую приложен к индуктивной нагрузке (электродвигателю), поэтому инвертор тока обязательно включает выходной емкостной фильтр, который сглаживает ток и выдает гладкое напряжение на нагрузку. Этот преобразователь может быть реализован для работы на средних напряжениях и более того он по природе имеет возможность рекуперации энергии.

Схема инвертора тока с выпрямителем
Прямые преобразователи
Прямые преобразователи передают энергию прямо от входа к выходу без использования элементов накопления энергии. Основным преимуществом таких преобразователей является меньшие габариты. Недостатком – необходимость более сложной схемы управления.
Циклоконвертер относится к категории прямых преобразователей. Данный преобразователь широко использовался в приложениях требующих высокую мощность. Этот конвертер состоит из двойных тиристорных преобразователей на фазу, который может генерировать изменяемое постоянное напряжение, контролируемое таким образом, чтобы следовать опорному синусоидальному сигналу. Вход каждого преобразователя питается от фозосмещающего трансформатора, где устраняются гармоники входного тока низкого порядка. Выходное напряжение является результатом комбинации сегментов входного напряжения в котором основная гармоника следует за опорным сигналом. По своей природе данный преобразователь хорошо подходит для управления низкочастотными мощными нагрузками.

Схема циклоконвертера
Матричный преобразователь в его прямой и непрямой версии также принадлежит к категории прямых преобразователей. Основной принцип работы прямого матричного преобразователя (direct matrix converter) — возможность соединения выходной фазы к любому из входных напряжений. Преобразователь состоит из девяти двунаправленных ключей, которые могут соединить любую входную фазу с любой выходной фазой, позволяя току течь в обоих направлениях. Для улучшения входного тока требуется индуктивно-емкостной фильтр второго порядка. Выход напрямую соединяется с индуктивной нагрузкой. Не все доступные комбинации ключей возможны, они ограничены только 27 правильными состояниями коммутации. Как говорилось ранее, основное преимущество матричных преобразователей — меньшие габариты, что важно для автомобильных и авиационных приложений.

Схема прямого матричного преобразователя
Непрямой матричный преобразователь (indirect matrix converter) состоит из двунаправленного трехфазного выпрямителя, виртуального звена постоянного тока и трехфазного инвертора. Количество силовых полупроводников такое же как у прямых матричных преобразователей (если двунаправленный ключ рассматривается как два однонаправленных ключа), но количество возможных состояний включения отличается. Используя ту же самую конфигурацию непрямого матричного преобразователя, возможно упростить его топологию и уменьшить количество элементов ограничив его работу от положительного напряжения в виртуальном звене постоянного тока. Уменьшенная топология называется разреженный матричный преобразователь (sparse matrix converter).

Схема непрямого матричного преобразователя

Схема разреженного матричного преобразователя
Библиографический список
engineering-solutions.ru
