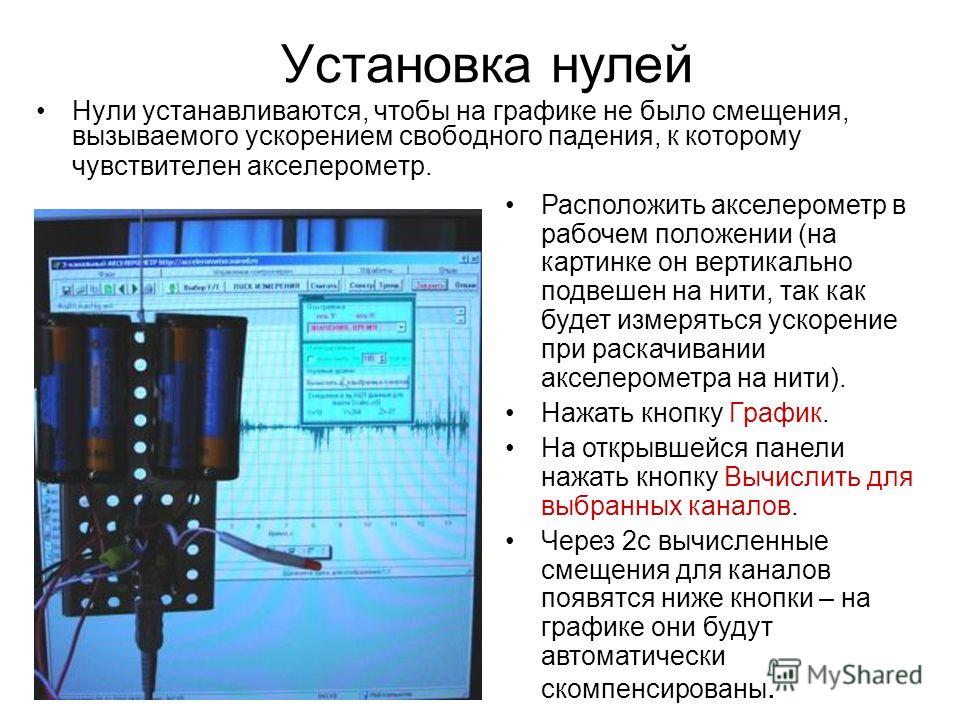
Что такое акселерометр в смартфоне. Как устроен акселерометр и какие функции он выполняет. Каков принцип работы акселерометра в мобильных устройствах. Для чего нужен акселерометр в современных смартфонах.
Что такое акселерометр и для чего он нужен в смартфоне
Акселерометр — это датчик, измеряющий ускорение устройства. В смартфонах он выполняет следующие основные функции:
- Автоматическая смена ориентации экрана при повороте устройства
- Управление в играх наклоном смартфона
- Реакция на жесты (встряхивание, переворот экраном вниз)
- Определение положения устройства для навигационных приложений
- Подсчет шагов и отслеживание физической активности
Акселерометр позволяет смартфону «понимать» свое положение в пространстве и реагировать на движения пользователя. Это значительно расширяет функциональность и удобство использования мобильных устройств.
Принцип работы и устройство акселерометра
Простейший акселерометр состоит из следующих основных элементов:
- Инертная масса (грузик)
- Пружина, к которой прикреплен грузик
- Неподвижный корпус, к которому крепится пружина
- Демпфер для гашения колебаний
- Датчик для измерения смещения грузика
При ускорении устройства инертная масса смещается, растягивая или сжимая пружину. Датчик фиксирует величину этого смещения. Чем больше ускорение — тем сильнее отклоняется грузик. Измеренные данные преобразуются в электрический сигнал и обрабатываются программным обеспечением.
Особенности акселерометров в смартфонах
В мобильных устройствах используются миниатюрные чипы вместо механических конструкций. Основные особенности:
- Размер чипа сравним с размером спичечной головки
- Изготавливаются методами микроэлектромеханики (МЭМС)
- Производство полностью автоматизировано
- Используются химические реакции между кремнием и другими элементами
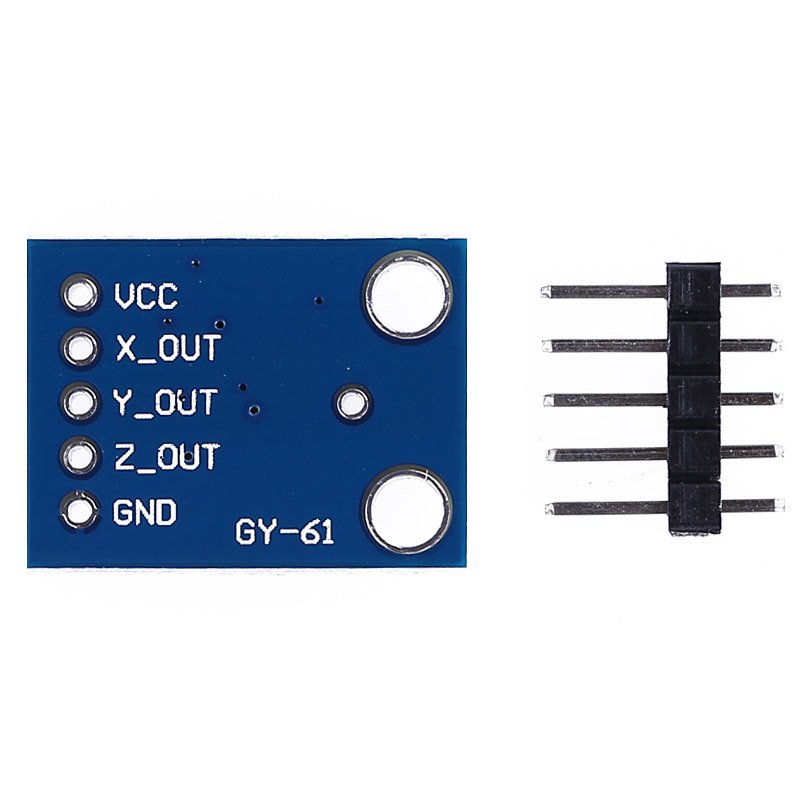
- Обычно содержат 3 оси чувствительности для измерения в трехмерном пространстве
Несмотря на миниатюрные размеры, современные акселерометры в смартфонах обладают высокой точностью и чувствительностью, что позволяет реализовать множество полезных функций.
Применение акселерометра в мобильных устройствах
Акселерометр находит широкое применение в современных смартфонах:
- Автоматический поворот экрана при смене ориентации устройства
- Управление в мобильных играх наклоном смартфона
- Подсчет шагов и мониторинг физической активности
- Определение свободного падения для защиты жесткого диска
- Запуск действий при встряхивании или переворачивании устройства
- Повышение точности геолокации в навигационных приложениях
- Анализ качества сна по движениям пользователя
Акселерометр позволяет сделать взаимодействие пользователя со смартфоном более естественным и интуитивным за счет реакции на движения и изменение положения устройства.
Ограничения акселерометров в мобильных устройствах
Несмотря на широкие возможности, акселерометры в смартфонах имеют ряд ограничений:
- Невысокая точность при длительных измерениях из-за накопления ошибок
- Сложность отделения ускорения устройства от гравитационного ускорения
- Чувствительность к вибрациям и случайным движениям
- Необходимость калибровки для повышения точности
- Высокое энергопотребление при постоянной работе
Для преодоления этих ограничений акселерометр часто используется совместно с другими датчиками, например, гироскопом и магнитометром. Это позволяет повысить точность и надежность измерений.

Калибровка акселерометра в смартфоне
Для корректной работы акселерометра в смартфоне может потребоваться его калибровка. Основные способы калибровки:
- Автоматическая калибровка программным обеспечением смартфона
- Калибровка с помощью специальных приложений
- Выполнение определенных движений смартфоном (вращение по осям)
- Калибровка в сервисном центре производителя
Качественная калибровка позволяет повысить точность измерений акселерометра и улучшить работу функций, использующих его данные. Рекомендуется периодически проводить калибровку, особенно после падений или сильных ударов устройства.
Перспективы развития акселерометров в мобильных устройствах
Технологии акселерометров продолжают совершенствоваться. Основные направления развития:
- Повышение точности и чувствительности измерений
- Уменьшение размеров и энергопотребления
- Интеграция с другими датчиками в единые модули
- Расширение функциональности за счет новых алгоритмов обработки данных
- Применение в системах дополненной и виртуальной реальности
Развитие технологий акселерометров позволит реализовать новые функции в мобильных устройствах и сделать взаимодействие с ними еще более естественным и удобным для пользователей.

Акселерометр — Вікіпедія
Матеріал з Вікіпедії — вільної енциклопедії.
Схема простого акселерометра. Вантаж закріплений на пружині. Демпфер пригнічує коливання вантажу. Чим більше повне прискорення, тим сильніше деформується пружина, змінюючи покази приладу.Акселеро́метр (від лат. accelero — «прискорюю» і грец. μετρεω — «вимірюю») — прилад, яким вимірюють прискорення або перевантаження, що виникають під час випробування різних машин та їхніх систем.[1]
Акселерометр — прилад для вимірювання сили реакції індукованої прискоренням або гравітацією. Одно- та багато-вісні моделі можуть визначати величину та напрям прискорення у вигляді векторної величини[2] і тому можуть бути використані для визначення орієнтації, вібрації й ударів.
Акселерометри присутні в багатьох портативних електронних пристроях й гральних консолях, включаючи iPhone[3] і Wii Remote від Nintendo.[4]
Акселерометр вимірює проекцію повного прискорення. Повне прискорення є рівнодіючою сил негравітаційної природи, що діє на масу, віднесеної до величини цієї маси. Акселерометр можна застосовувати як для того, щоб вимірювати проекції абсолютного лінійного прискорення, так і посередні[5] проекції гравітаційного прискорення. Остання властивість використовується щоб створювати інклінометри. Акселерометр входить до складу інерціальних навігаційних систем, де отримані за їх допомогою виміри інтегрують, отримуючи інерційну швидкість і координати носія.
Повне прискорення є рівнодіючою сил негравітаційної природи, що діє на масу, віднесеної до величини цієї маси. Акселерометр можна застосовувати як для того, щоб вимірювати проекції абсолютного лінійного прискорення, так і посередні[5] проекції гравітаційного прискорення. Остання властивість використовується щоб створювати інклінометри. Акселерометр входить до складу інерціальних навігаційних систем, де отримані за їх допомогою виміри інтегрують, отримуючи інерційну швидкість і координати носія.
Застосовується при випробуваннях та експлуатації кораблів, літаків, ракет, автомобілів тощо, а також як чутливий елемент автопілотів, гіровертикалей та ін.
Крім того, в зв’язку з розвитком автоматизованих систем числового програмного керування верстатів, акселерометри використовуються для контролю стану різального інструменту, що дозволяє в онлайн-режимі проводити корекцію законів керування та, відповідно, контролювати точність обробки виробу[6]. Акселерометри використовують в системах управління жорстких дисків комп’ютерів для активації механізму захисту від пошкоджень (які можуть бути отримані в результаті ударів і падінь). [7]
[7]
Інші застосування[ред. | ред. код]
Останнім часом завдяки поширенню знань акселерометри застосовують у манекенах для вимірювання навантаження на органи людини в екстремальних умовах.
Також широко застосовується в смартфонах. В першу чергу, саме завдяки акслерометрам зображення на екрані змінює своє положення в залежності від горизонтальної або вертикальної орієнтації гаджета. Як наслідок, його наявність забезпечує як яскравий ігровий процес, так і деякі службові функції: наприклад, деякі моделі дозволяють прийняти вхідний дзвінок, легко потрусивши апарат.
Розрізняють акселерометри[8]
- за принципом будови:
- механічні
- електромеханічні
- електричні
- інші
- за видом руху:
- лінійні
- кутові
- за призначенням:
- що вимірюють прискорення як функцію
- максимальні, що вимірюють:
- момент досягнення об’єктом заданого значення прискорення
- максимальне значення прискорення в швидкоплинному процесі (наприклад, за удару)
Найчутливіші та найточніші (до мільйонних часток) акселерометри застосовують саме в інерціальній навігації.
что это, как работает и зачем нужен в фитнес-браслете, часах и смартфоне
Практически в каждом описании характеристик современного смартфона, фитнес-браслета или умных часов можно встретить упоминание датчика под названием «акселерометр». Еще его могут называть «датчик ускорения» или G-сенсор. Что это такое, как работает и зачем нужен в телефоне, часах или браслете, читайте далее.
Акселерометр: что это и зачем нужен?
Простым языком, акселерометр – это прибор, измеряющий ускорение (величину изменения скорости). Название прибора происходит от латинского «accelero», что дословно переводится, как «ускоряю» и греческого «metreō», что в переводе означает «измеряю».
Измерение величины динамического ускорения позволяет определить, насколько быстро и в каком направлении движется устройство с акселерометром. По конструктивному исполнению акселерометры подразделяются на однокомпонентные, двухкомпонентные, трёхкомпонентные (одноосевые, двух осевые и трехосевые). Например, 3-осевой датчик ускорения может определять величину и направление ускорения как векторную величину во всех трех осях.
Например, 3-осевой датчик ускорения может определять величину и направление ускорения как векторную величину во всех трех осях.
Часто этот датчик путают с гироскопом, но это совершенно разные датчики, хотя часто они взаимодополняют друг друга для достижения более точных результатов, а иногда даже могут выполнять одни и те же функции. Отличаются же эти датчики принципом работы и эффективностью при выполнении конкретной задачи.
В основном в устройствах акселерометр используется для определения ориентации, ударов, вибрации и ускорения координат. Например, в смартфонах именно акселерометр отвечает за переворот картинки при изменении положения корпуса, а фитнес-браслетах он активирует экран при вращении запястья.
Где применяется акселерометр?
Датчик ускорения применяется в самых различных сферах:
- Навигационные устройства летательных аппаратов. Без приборов на основе гироскопов и акселерометров не может обойтись ни один самолет, вертолет и даже квадрокоптер.
 Так, например, для работы квадрокоптера необходимо минимум три гироскопа.
Так, например, для работы квадрокоптера необходимо минимум три гироскопа.
- Автомобили. В автомобилях акселерометр интегрируется в системы безопасности и стабилизации. Прибор определяет экстренное торможение или дорожно-транспортное происшествие и запускает электрическую цепь, которая заставляет подушки безопасности срабатывать.
- Промышленность. Датчики активно используются в различных станках, агрегатах и производственных линиях в системах защиты для отключения питания в случае поломок или при достижении критических значений.
- Электроника. В компьютерах и ноутбуках акселерометр применяется для защиты жестких дисков от ударов и падений. В случае обнаружения падения прибор отдает команду считывающим головкам принять безопасное положение для избегания повреждения диска и потери данных.
- В смартфонах и планшетах акселерометр отвечает за смену ориентации экрана при повороте корпуса, а также за управление игровым процессом при наклонах гаджета.
 В фитнес-браслетах и часах акселерометр применяется для подсчета шагов, отслеживания сна и активации экрана поднятием запястья.
В фитнес-браслетах и часах акселерометр применяется для подсчета шагов, отслеживания сна и активации экрана поднятием запястья.
- Бытовая техника. Да, акселерометрами могут оснащаться даже стиральные машины, утюги и тепловентиляторы. Например, в утюгах акселерометр, обнаружив его падение, отключает питание, чтобы не допустить возникновения пожара.
Как работает акселерометр?
Большинство устройств оснащается емкостными, пьезорезистивными и пьезоэлектрическими приборами. Часто акселерометр представляет собой микроэлектромеханическую систему (MEMS), содержащую несколько компонентов, каждый размером от 1 до 100 микрометров. Размер же прибора обычно не превышает габариты спичечной головки.
Механический акселерометрОбъяснить принцип работы акселерометра проще на механическом приборе. Он состоит из пружины, прикрепленной к корпусу, подвижной массы и демпфера. Масса или, проще сказать, грузик, крепится к пружине. С обратной стороны грузик поддерживает демпфер, гасящий вибрации грузика. Во время ускорения корпуса пружина деформируется (растягивается или сжимается) по противоположным осям под воздействием грузика, стремящегося сохранить свое первоначальное положение, то есть отстать или опередить корпус. На величине деформации и основываются вычисления прибора.
Во время ускорения корпуса пружина деформируется (растягивается или сжимается) по противоположным осям под воздействием грузика, стремящегося сохранить свое первоначальное положение, то есть отстать или опередить корпус. На величине деформации и основываются вычисления прибора.
Для получения информации о положении предмета в трехмерном пространстве используется три таких прибора, объединенных в один комплекс.
Конечно же, никто не будет «запихивать» в компактный фитнес-браслет или смартфон такую громоздкую конструкцию. Поэтому она заменяется миниатюрным чипом. Хотя чип и более сложный, чем прибор с шариком и пружиной, он имеет те же основные элементы.
У такого чипа имеется корпус, который крепится к часам или смартфону, «гребенчатая» секция с отведенными по сторонам пластинами и ряд фиксированных пластин, снимающих показания. Эта секция может перемещаться вперед и назад, изменяя значение напряженности поля вокруг контактов. Полученные данные передаются на обработку электроникой и программным обеспечением, после чего происходит вычисление физического расположения устройства.
Но самое интересное, как изготавливаются такие акселерометры. При толщине примерно 500 микрон ни один инструмент не сможет его создать. Вместо этого инженеры используют некоторые уникальные химические свойства кремния и силикона с другими веществами. Весь процесс изготовления полностью автоматизирован и выполняется на конвейерных линиях без участия человека.
Также понять как работает акселерометр поможет короткое видео ниже:
Чем отличается акселерометр от гироскопа?
Хотя в некоторых случаях гироскоп и акселерометр и могут выполнять одни и те же функции, это два абсолютно разных датчика, которые часто используются в паре для достижения максимального эффекта. Часто такой дуэт называют 6-осевым датчиком.
Акселерометр не умеет точно измерять угол поворота устройства в пространстве, а может лишь примерно его оценить. На практике это может выражаться в ложных срабатываниях и задумчивости в повороте экрана. И тут на помощь приходит гироскоп. Не вдаваясь в подробности о принципе работы данного прибора, скажем, что он может определять не только угол поворота устройства, но и скорость поворота, что, например, во время игры на смартфоне позволяет реализовать более быстрое и точное управление.
Не вдаваясь в подробности о принципе работы данного прибора, скажем, что он может определять не только угол поворота устройства, но и скорость поворота, что, например, во время игры на смартфоне позволяет реализовать более быстрое и точное управление.
Поэтому в большинстве устройств эти два прибора устанавливаются совместно для достижения наибольшей эффективности.
Акселерометр в фитнес-браслете и смарт-часах
В фитнес-браслетах и умных часах акселерометр отвечает за несколько функций. Обнаруживая поднятие или вращение руки, он отдает сигнал для включения экрана. Также именно акселерометр отвечает за подсчет шагов и мониторинг сна. На акселерометре «завязана» и работа функции «Умный будильник», который будит владельца гаджета в фазе быстрого сна.
Акселерометр в телефоне
Первый акселерометр появился в телефоне Nokia 5500. Там он использовался для подсчета пройденных шагов. Такое решение многим понравилось и с тех пор компания Apple стала оснащать таким датчиком все модели своих iPhone. А начиная с iPhone, если не ошибаюсь, четвертого поколения, в дополнение к акселерометру компания стала оснащать свои смартфоны гироскопом. После этого наличие этой пары датчиков стало стандартом для большинства производителей мобильных устройств.
А начиная с iPhone, если не ошибаюсь, четвертого поколения, в дополнение к акселерометру компания стала оснащать свои смартфоны гироскопом. После этого наличие этой пары датчиков стало стандартом для большинства производителей мобильных устройств.
Акселерометр в телефоне отвечает не только за поворот экрана при наклоне корпуса. Он так же как и в случае с фитнес-браслетом позволяет вести учет пройденного расстояния. Еще акселерометру нашли применение в системных жестах. Например, отключение звука телефона встряхиванием или переворотом смартфона вниз экраном.
Как откалибровать акселерометр?
В некоторых случаях может потребоваться настройка или калибровка акселерометра. Например, если телефон не реагирует на поворот корпуса или не точно считаются шаги. Для смартфонов под управлением операционной системы ANDROID для этих целей есть несколько сторонних приложений, например GPS Status & Toolbox. Для iPhone таких приложений нет, поэтому в случае сбоев придется ограничиться перезагрузкой устройства. Обычно это помогает.
Обычно это помогает.
Некоторые производители фитнес-браслетов и смарт-часов также позволяют откалибровать акселерометр. Точнее, не откалибровать, а «обучить» с помощью «Меток поведения», то есть помогая датчику более точно понимать, какое именно действие владелец гаджета выполняет в тот или иной момент. Такая возможность есть у владельцев популярной линейки Xiaomi Mi Band и ряда других моделей.
Источник изображений: YouTube , Wikipedia
МЭМСы. Как устроены современные датчики? / Блог компании Миландр / Хабр
Микроэлектромеханические системы (МЭМС) — устройства, объединяющие в себе микроэлектронные и микромеханические компоненты. Сейчас довольно трудно встретить системы в которых не используются датчики, выполненные по данной технологии. Но как устроены современные датчики и какие преобразователи используются для работы с ними? Постараемся детально разобраться в этом вопросе, основываясь на работе современных МЭМС-акселерометров.Простейший акселерометр, как он работает?
Акселерометр — прибор, измеряющий проекцию кажущегося ускорения (разности между истинным ускорением объекта и гравитационным ускорением).
 Принцип работы можно объяснить с помощью простой модели.
Принцип работы можно объяснить с помощью простой модели.Модель устройства механического акселерометра (оригинал)
При увеличении ускорения, масса будет растягивать пружину. По закону Гука из школьной программы физики можно с легкостью найти ускорение системы:
, где k -коэффициент упругости пружины, – ее растяжение и m – масса груза.
Используя три перпендикулярно расположенных датчика, можно узнать ускорение предмета по 3-м осям, и зная начальные условия определить положение тела в пространстве.
Эта незамысловатая модель представляет собой основу работы большинства акселерометров, которые можно поделить на 3 основные подгруппы:
- механические
- электронные
- пьезоэлектрические
Есть еще термальные и оптические, однако их рассматривать не будем. Если с механическими все понятно (по сути, их работу отражает модель сверху), то с электронными и пьезоэлектрическими немного поинтереснее.
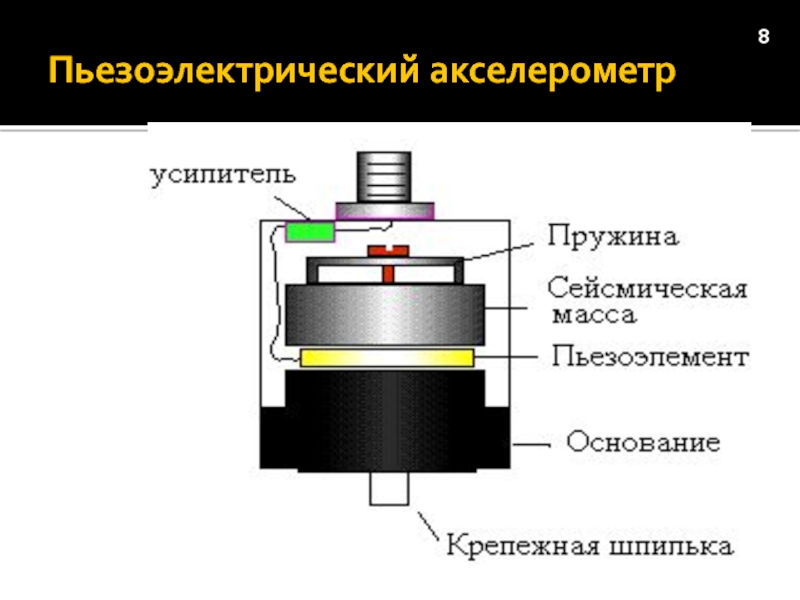
Пьезоэлектрический акселерометр
Основывается данный тип датчиков на пьезорезистивном эффекте, который был открыт в 1954 году Смитом в таких полупроводниках как германий и кремний.
 В отличие от пьезоэлектрического эффекта, пьезорезистивный эффект вызывает изменение только электрического сопротивления, но не электрического потенциала.
В отличие от пьезоэлектрического эффекта, пьезорезистивный эффект вызывает изменение только электрического сопротивления, но не электрического потенциала.Анимация пьезоэффекта (оригинал)
При увеличении ускорения, инертная масса увеличивает/уменьшает давление на пьезоэлемент. Благодаря пьезоэффекту происходит генерация сигнала, который зависит от внешнего ускорения.
Устройство пьезоэлектрического акселерометра (оригинал)
Датчики такого типа требуют дополнительного усилителя, который увеличивает амплитуду сигнала, и создает низкоимпедансный выход для работы с внешними устройствами. Для калибровки нулевого значения ускорения используется Preload Bolt, масса которого рассчитана так, чтобы соответствовать нулевой точки ускорения в системе.
Датчики такого типа до сих пор сильно распространены, и в основном применяются в системах, требующих высокую надежность — automotive. Для коммерческой электроники зачастую используют электронные акселерометры, которые имеют меньший размер и цену.
Электронные акселерометры
Принцип работы электронных датчиков основан на изменении емкости конденсаторов при изменении ускорения. Простейшая модель работы представлена на картинке.
Устройство 2-х осевого электро-механического акселерометра
При изменении ускорения, масса изменяет расстояние между обкладками конденсатора. Из простейшей формулы емкости конденасатора следует, что при изменении d расстояния между обкладками емкость конденсатора будет также изменяться. Широкое применение данный метод получил, благодаря развитию МЭМС (MEMS)– микроэлектромеханических систем.
МЭМС технологии позволяют создавать конденсаторы с подвижными обкладками на кремниевой подложке, что существенно уменьшает размер устройства, и что не маловажно – его стоимость.
Устройство 2-х осевого электро-механического акселерометра (оригинал из книги «Introductory MEMS». Дальнейшие иллюстрации тоже взяты из этой книги)
У читателя наверняка возник вопрос: “как именно детектировать изменение емкости конденсатора?” Постараюсь дать на этот вопрос исчерпывающий ответ.
Устройство МЭМС акселерометра. Как превратить изменение емкости в сигнал?
Емкостной полумост
Итак прежде, чем описывать работу самого датчика, обратимся к довольно популярной схеме в схемотехнике – емкостному полумосту (Capacitive half-bridge).
Емкостной полумост — основа МЭМС-датчиков
Напряжения и являются входными, а – выходной сигнал для последующего преобразования. Емкости обоих конденсаторов зависят от внешнего ускорения, и изменяются на величину x(t). При x = 0, заряды на емкостях являются идентичными, и при этом . При условии, что x <<d найдем как зависит изменение емкости конденсаторов от изменения положения обкладки.
Вывод формулы для изменения емкости Запишем изменение каждой емкости при сдвиге обкладки на x:Запишем через формулу емкости:
Упростив данные формулы, получаем следующее:
Учитывая условие, что x
Итак часть пути пройдена, мы получили как зависит значение изменения емкости от изменения положения обкладки (то есть внешнего ускорения).
Емкостной полумост — токи
Учитывая тот факт, что ток является производной заряда dq/dt, а заряд q=CU, преобразуем данное уравнение в следующий вид:
Пусть потенциалы , тогда исходя из формулы (1.1):
Итак если использовать одинаковые потенциалы входных напряжений получаем зависимость тока:Результат получился довольно странный: выходной ток никак не зависит от изменения емкости. Для того, чтобы детектировать изменение емкости, необходимо задавать на обкладках напряжения разной полярности, то есть: , а . Тогда переделаем уравнение с учетом данной модификации. Зависимость тока от изменения положения обкладки с учетом разной полярности входных напряжений Перепишем уравнение 1.
 3:
3:Упрощаем:
Берем производную:
Учитывая уравнение 1.2 для изменения емкости, получаем:
Из этого уравнения видны следующие факты:
- если положение пластин не меняется во времени, то
- аналогично если источник сигнала постоянный (DC), то
Для эффективной работы емкостного полумоста необходимо использовать переменные входные сигналы e1 и e2, смещение фаз между которыми будет равно 180 градусов (для того, чтобы потенциалы имели разный знак). Поэтому получаем следующий вид сигналов: , гд
Что такое акселерометр в смартфоне, принцип его строения и работы
Термин «акселерометр» произошел от латинского accelero, что в переводе означает «ускоряю». Акселерометр – это прибор, с помощью которого измеряется кажущееся ускорение. Другими словами, он призван помочь программному обеспечению смартфона определить положение, а также расстояние перемещения мобильного устройства в пространстве.
Часто этот датчик путают с гироскопом. Однако, это разные датчики, хотя взаимодополняют друг друга, и даже могут выполнять одни и те же функции. Их отличие заключается в принципе работы, а также в эффективности выполнении конкретных задач. Могут использоваться совместно, для достижения наиболее точных результатов.
Для чего нужен акселерометр в смартфоне
Датчик значительно расширяет возможности смартфона. Ниже перечислены основные функции, за которые он отвечает.
- Автоматическая смена ориентации экрана при повороте девайса.
- Управление игровым процессом при помощи наклонов.
- Реагирование устройства на определенные жесты, и выполнение соответствующих действий (смена музыкального трека, отключение будильника или отклонение звонка). Примеры жестов: постукивание по корпусу или его встряхивание, переворот смартфона экраном вниз.
- Определение и визуальная демонстрация изменений положения человека в пространстве через навигационные приложения (Google Карты и др.
 ).
). - Возможность отслеживания физической активности. Классический пример – подсчет пройденной дистанции при помощи шагометра.
Как работает акселерометр, принцип его строения
На картинке ниже изображена схематическая конструкция самого простого акселерометра.
Он состоит из инертной массы (в данном примере ее роль выполняет грузик), который прикреплен к подвижному, упругому элементу (например, к пружине). Пружина, в свою очередь, фиксируется на неподвижной детали. Для подавления колебаний грузика используется демпфер. Когда происходит встряска, наклон или поворот объекта, в который встроен акселерометр, инертная масса реагирует на силу инерции. С увеличением интенсивности и силы наклона, поворота или сотрясения увеличивается радиус деформации пружины.
Затем грузик принимает свою прежнюю позицию, благодаря пружине. Специальный датчик фиксирует уровень смещения инертной массы от ее положения в состоянии «покоя». Затем эти данные преобразуются в электрический сигнал, и передаются на обработку электроникой, и программным обеспечением. Благодаря полученным данным программа может «вычислить» изменения в физических изменениях расположения объекта.
Благодаря полученным данным программа может «вычислить» изменения в физических изменениях расположения объекта.
Еще есть такое понятие, как ось чувствительности прибора. Если ось только одна, датчик сможет передать данные об изменении положения объекта в пространстве только в пределах чувствительности оси. Чтобы увеличить чувствительность датчика, и получить точные данные о силе и направлении наклона объекта, необходимо две, а еще лучше три оси. Объединив в один прибор сразу три оси, можно вычислить положение объекта в трехмерном пространстве.
Акселерометр в смартфонах
По техническим и иным причинам описанная выше конструкция датчика неприменима в мобильных устройствах. Она заменяется миниатюрным чипом, внутри которого находится инертная масса.
Принцип действия чипа схож с классическим датчиком: инертная масса меняет свою позицию во время ускорения. Благодаря этому смартфон и получает данные о положении в пространстве. Но между классическими приборами и чипами существует огромная разница не только в конструкции, но и в методе производства.
Схема акселерометра в смартфоне
Изготовление подобных датчиков – полностью автоматизированный процесс. Чтобы получить рабочий экземпляр, используется химическая реакция между силиконом и другими элементами. Процесс требует высочайшей точности в расчетах и пропорциях. Вручную, при помощи физического воздействия на материалы сделать это фактически невозможно.
Вывод
Акселерометр в мобильном устройстве, представляющий собой лишь крохотный чип, имеет существенное влияние на взаимодействие между человеком и смартфоном. С его помощью управление аппаратом переходит на новый, более комфортный уровень. А игры и приложения получают множество дополнительных возможностей, которые можно реализовать при помощи акселерометра.
Использование акселерометров для оценки положения и скорости
1. Введение
Нас часто спрашивают, можно ли использовать измерения акселерометра от датчиков ориентации CH Robotics для оценки скорости и положения. Короткий ответ — «да и нет». Это полностью зависит от того, какая точность требуется. В целом, оценки положения и скорости на основе акселерометра с помощью недорогих датчиков (сотни долларов США вместо десятков тысяч) очень плохи и просто непригодны для использования.Это не потому, что сами акселерометры плохие, а потому, что ориентация датчика должна быть известна с высокой степенью точности, чтобы измерения силы тяжести можно было отличить от физического ускорения датчика. Даже небольшие ошибки в оценке ориентации приведут к чрезвычайно высоким ошибкам в измеренном ускорении, что приведет к еще большим ошибкам в оценках скорости и положения. Без более точных гироскопов (например, FOG или Ring-Laser) или без добавления внешнего источника, такого как GPS, точный расчет точного счисления обычно невозможен.
Короткий ответ — «да и нет». Это полностью зависит от того, какая точность требуется. В целом, оценки положения и скорости на основе акселерометра с помощью недорогих датчиков (сотни долларов США вместо десятков тысяч) очень плохи и просто непригодны для использования.Это не потому, что сами акселерометры плохие, а потому, что ориентация датчика должна быть известна с высокой степенью точности, чтобы измерения силы тяжести можно было отличить от физического ускорения датчика. Даже небольшие ошибки в оценке ориентации приведут к чрезвычайно высоким ошибкам в измеренном ускорении, что приведет к еще большим ошибкам в оценках скорости и положения. Без более точных гироскопов (например, FOG или Ring-Laser) или без добавления внешнего источника, такого как GPS, точный расчет точного счисления обычно невозможен.
Тем не менее, не все приложения требуют высокой точности, и иногда абсолютная точность не так важна, как возможность измерения краткосрочных отклонений скорости и положения. Для обзора видов точности, которые вы можете ожидать при использовании датчиков CH Robotics для точного счисления, перейдите к Разделу 4 — Точность оценок скорости и положения.
Для обзора видов точности, которые вы можете ожидать при использовании датчиков CH Robotics для точного счисления, перейдите к Разделу 4 — Точность оценок скорости и положения.
В этом примечании к применению мы обсуждаем, что требуется для получения оценок скорости и положения с использованием данных от датчиков CH Robotics, которые еще не предоставляют данные о скорости и положении на основе акселерометра в качестве стандартных выходных данных (на момент написания это включает UM7 и УМ7-ЛТ).Мы также обсуждаем ожидаемую точность измерений ускорения и то, как эта точность повлияет на надежность получаемых оценок скорости и положения.
Это примечание по применению предполагает знакомство с системами координат, используемыми для оценки положения на датчиках CH Robotics. Для простоты также предполагается, что выходы угла Эйлера используются вместо выходов кватернионов датчика, хотя обсуждение в равной степени применимо и к выходам кватернионов. Дополнительные сведения о системе координат и углах Эйлера см.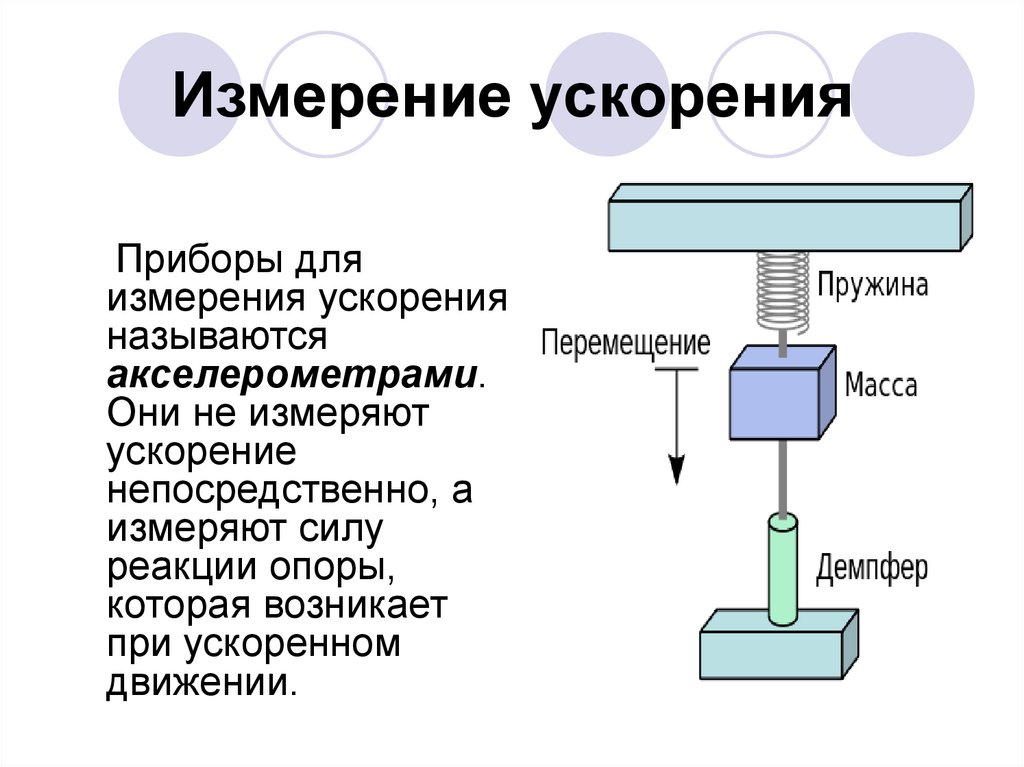 В главе библиотеки, посвященной пониманию углов Эйлера.
В главе библиотеки, посвященной пониманию углов Эйлера.
2. Извлечение инерциально-кадрового ускорения
Чтобы получить скорости и положения инерциальной системы отсчета, сначала необходимо получить физическое ускорение датчика в инерциальной системе отсчета. Чтобы преобразовать измерение акселерометра в фактическое физическое ускорение датчика, важно сначала точно понять, что измеряет акселерометр. В примечании к применению AN1008 подробно описано поведение акселерометра, поэтому полное обсуждение здесь не приводится.Подводя итог, акселерометр измеряет как физическое ускорение датчика, так и вклад нормальных сил, которые препятствуют ускорению акселерометра к центру Земли (т. Е. Сила, приложенная к акселерометру столом, на котором он сидит, фактически измеряется. датчиком). Чтобы измерить только компонент ускорения, вызванный физическим ускорением, нормальные силы должны быть удалены. Как описано в примечании к применению AN1008, вектор измерения 3-осевого акселерометра можно смоделировать как
, где — фактическое ускорение корпуса-рамы, g, — ускорение свободного падения, и — матрица вращения от инерциальной рамы к корпусной раме датчика. Эта модель предполагает, что в измерении отсутствуют ошибки совмещения осей, масштабного коэффициента или смещения.
Эта модель предполагает, что в измерении отсутствуют ошибки совмещения осей, масштабного коэффициента или смещения.
Чтобы оценить скорость инерциальной рамки и положение датчика, нам нужно удалить компонент нормальной силы из измерения ускорения. Решая для ускорения корпуса кузова, получаем
Ускорение тела и рамы затем должно быть преобразовано в инерциальную систему отсчета, чтобы его можно было интегрировать для получения скорости и положения. Это дает
Это уравнение можно использовать непосредственно для измерения инерционного ускорения кадра датчика.Обратите внимание, что датчики CH Robotics обычно отображают ускорение в единицах силы тяжести, а не в м / с / с или фут / с / с. Таким образом, термин должен быть г либо равным 1 весу, либо должен быть преобразован в желаемые единицы. Мы рекомендуем использовать g = 9,8 м / с / с и умножить на то же самое, чтобы полученное инерционное ускорение выражалось в м / с / с. Затем интеграция измерения ускорения даст скорость в м / с и позицию в метрах.
Затем интеграция измерения ускорения даст скорость в м / с и позицию в метрах.
3. Оценка скорости и положения
После получения измеренного ускорения инерциальной рамки его можно интегрировать для получения скорости и положения инерционной рамки:
На практике данные получают через дискретные интервалы времени, так что расчетная скорость и положение оцениваются с использованием
, где T — период выборки.Не то чтобы в зависимости от оборудования, используемого для связи с датчиком, период выборки может быть непостоянным, и поэтому его следует измерять при проведении оценок. Это проще, если данные датчика считываются с помощью микроконтроллера или компьютера с ОСРВ. Стандартный ПК с Windows будет вносить непредсказуемые задержки в фактическое время прибытия последовательных данных, что вызовет проблемы с точностью синхронизации.
4. Точность оценок скорости и положения
В разделе 2 мы обсудили операции, необходимые для преобразования измеренного ускорения в физическое (не гравитационное) ускорение в инерциальной системе отсчета. Напомним, что для преобразования необходимо использовать текущую оценку ориентации, чтобы повернуть измерение в инерциальную систему отсчета.
Напомним, что для преобразования необходимо использовать текущую оценку ориентации, чтобы повернуть измерение в инерциальную систему отсчета.
Обратите внимание, что есть вращение матрицы для преобразования измерения тела-рамы в инерциальную систему отсчета, после чего в инерциальную рамку добавляется ожидаемый вектор гравитации. Это дополнение устраняет измерение обычных сил, которые не вызывают физического ускорения датчика.
Если бы оценка ориентации была идеальной, этот шаг не привнес бы дополнительной ошибки в измерение ускорения, и единственный вклад в ошибку был бы внесен неточностью самого акселерометра.
Поскольку на практике мы никогда не можем точно знать ориентацию датчика, добавление гравитационного члена в не удалит измеренные нормальные силы, и эти силы будут ошибочно приняты за физическое ускорение. Оказывается, что на недорогих датчиках (сотни долларов вместо десятков тысяч) ошибка ориентации вызовет ошибки измерения ускорения, которые могут затмить ошибки из-за несоосности и калибровки акселерометра. Величина этих ошибок будет достаточно большой, чтобы оценки положения и скорости на основе акселерометра были непригодны для большинства приложений.
Величина этих ошибок будет достаточно большой, чтобы оценки положения и скорости на основе акселерометра были непригодны для большинства приложений.
Таблица 1 суммирует ошибки ускорения, скорости и положения, которые можно ожидать при различных ошибках в оценке ориентации датчика.
Таблица 1 — Сводка ошибок скорости и положения, вызванных ошибкой оценки ориентации.
Как показано, угловая погрешность даже в один градус приведет к отклонению расчетной скорости на 1,7 м / с через 10 секунд и отклонению позиции на 17,1 метра за то же время. Через одну минуту угловая погрешность в один градус приведет к отклонению оценки местоположения почти на целый километр.Через десять минут позиция будет отклонена на 62 километра.
Ожидается, что на заводе точность датчиков UM7 и UM7-LT будет в пределах 2 градусов от фактической при нормальных условиях эксплуатации. Используя это как верхнюю границу, UM7 или UM7-LT можно использовать для точного расчета скорости и оценки положения, если погрешность определения местоположения 34,2 метра за 10 секунд и погрешность скорости 3,4 м / с за 10 секунд не быть проблемой.
Есть положительный момент в том, что ошибки ориентации затрудняют оценку положения с помощью акселерометров: поскольку ошибка ускорения тесно связана с ошибкой положения и скорости, на самом деле можно использовать измерения скорости и положения для оценки положения! Наш GP9 делает это.Более подробную информацию о том, как мы это делаем, можно найти здесь.
Также стоит учесть, что этот анализ учитывает только влияние ошибок оценки ориентации. Ошибочная калибровка акселерометра также вызовет ошибки измерения, особенно когда некалиброванные датчики используются в широком диапазоне температур. Изменение масштабных коэффициентов и смещений может быть значительным во всем диапазоне рабочих температур, поэтому калибровка становится критически важной.
Таким образом, можно использовать акселерометры для оценки скорости и положения, но точность будет очень низкой, так что в большинстве случаев оценки бесполезны.
Руководство по использованию IMU (акселерометров и гироскопов) во встроенных приложениях. — Старлино Электроникс
— Старлино Электроникс
Введение
Теперь эта статья переведена на ФРАНЦУЗСКИЙ язык в формате PDF. Спасибо Даниэлю Ле Герну!
Это руководство предназначено для всех, кто интересуется инерционными датчиками MEMS (микроэлектромеханические системы), в частности акселерометрами и гироскопами, а также комбинированными устройствами IMU (инерциальные измерительные устройства).
Пример блока IMU: Acc_Gyro_6DOF поверх блока обработки MCU UsbThumb, обеспечивающего USB / последовательное соединение
В этой статье я постараюсь осветить несколько основных, но важных тем:
— что измеряет акселерометр
— что измеряет гироскоп (он же гироскоп)
— как преобразовать аналого-цифровые (АЦП) показания, которые вы получаете от этого датчика, в физические единицы (это будет g для акселерометра, градусы / s для гироскопа)
— как объединить показания акселерометра и гироскопа, чтобы получить точную информацию о наклоне вашего устройства относительно плоскости земли
На протяжении всей статьи я постараюсь свести математические вычисления к минимуму. Если вы знаете, что такое синус / косинус / тангенс, тогда вы сможете понять и использовать эти идеи в своем проекте независимо от того, на какой платформе вы используете Arduino, Propeller, Basic Stamp, чипы Atmel, Microchip PIC и т. Д. кто считает, что вам нужна сложная математика, чтобы использовать блок IMU (сложные FIR или IIR фильтры, такие как фильтры Калмана, фильтры Паркс-Макклеллана и т. д.). Вы можете исследовать все это и получить замечательные, но сложные результаты. Мой способ объяснения требует простой математики.Я верю в простоту. Я думаю, что простую систему легче контролировать и контролировать, к тому же у многих встроенных устройств нет мощности и ресурсов для реализации сложных алгоритмов, требующих матричных вычислений.
Если вы знаете, что такое синус / косинус / тангенс, тогда вы сможете понять и использовать эти идеи в своем проекте независимо от того, на какой платформе вы используете Arduino, Propeller, Basic Stamp, чипы Atmel, Microchip PIC и т. Д. кто считает, что вам нужна сложная математика, чтобы использовать блок IMU (сложные FIR или IIR фильтры, такие как фильтры Калмана, фильтры Паркс-Макклеллана и т. д.). Вы можете исследовать все это и получить замечательные, но сложные результаты. Мой способ объяснения требует простой математики.Я верю в простоту. Я думаю, что простую систему легче контролировать и контролировать, к тому же у многих встроенных устройств нет мощности и ресурсов для реализации сложных алгоритмов, требующих матричных вычислений.
Я буду использовать в качестве примера новый блок IMU, который я разработал — акселерометр Acc_Gyro + Gyro IMU. Мы будем использовать параметры этого устройства в наших примерах ниже. Это устройство — хорошее устройство для начала, потому что оно состоит из 3 устройств:
— LIS331AL (техническое описание) — аналоговый 3-осевой акселерометр 2G
— LPR550AL (техническое описание) — двухосный (наклон и крен), гироскоп 500 град / с
— LY550ALH (техническое описание) — одноосный гироскоп (рысканье) (это последнее устройство не используется в этом руководстве, но оно станет актуальным, когда вы перейдете к реализации матрицы DCM)
Вместе они представляют собой инерциальный измерительный блок с шестью степенями свободы. Вот это красивое имя! Тем не менее, за причудливым названием скрывается очень полезное комбинированное устройство, которое мы рассмотрим и подробно объясним ниже.
Вот это красивое имя! Тем не менее, за причудливым названием скрывается очень полезное комбинированное устройство, которое мы рассмотрим и подробно объясним ниже.
Часть 1. Акселерометр
Чтобы разобраться в этом устройстве, начнем с акселерометра. Когда вы думаете об акселерометрах, часто бывает полезно представить коробку в форме куба с шаром внутри. Вы можете представить себе что-нибудь еще, например, печенье или пончик, но я представлю шар:
Если мы возьмем этот ящик в месте без гравитационных полей или, если уж на то пошло, без других полей, которые могли бы повлиять на положение мяча, мяч просто поплывет в середине коробки.2), мяч ударится о стену X-. Затем мы измеряем силу давления, которую мяч прикладывает к стене, и выводим значение -1g по оси X.
Обратите внимание, что акселерометр фактически обнаруживает силу, направленную в противоположном направлении от вектора ускорения. Эту силу часто называют инерционной силой или фиктивной силой.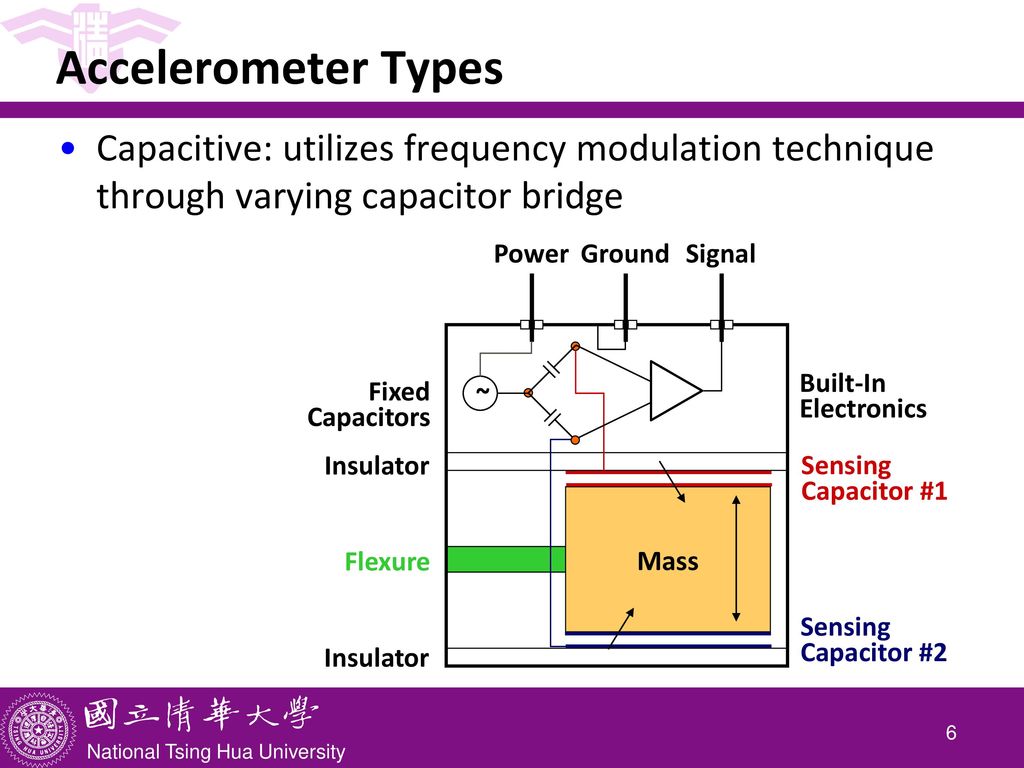 Одна вещь, которую вы должны извлечь из этого, заключается в том, что акселерометр косвенно измеряет ускорение через силу, прилагаемую к одной из его стенок (согласно нашей модели, это может быть пружина или что-то еще в реальных акселерометрах).Эта сила может быть вызвана ускорением, но, как мы увидим в следующем примере, она не всегда вызвана ускорением.
Одна вещь, которую вы должны извлечь из этого, заключается в том, что акселерометр косвенно измеряет ускорение через силу, прилагаемую к одной из его стенок (согласно нашей модели, это может быть пружина или что-то еще в реальных акселерометрах).Эта сила может быть вызвана ускорением, но, как мы увидим в следующем примере, она не всегда вызвана ускорением.
Если мы возьмем нашу модель и поместим ее на Землю, мяч упадет на Z-стенку и приложит силу 1g к нижней стенке, как показано на рисунке ниже:
В этом случае коробка не движется, но мы все равно получаем значение -1g по оси Z. Давление, которое мяч оказывал на стену, было вызвано силой гравитации. Теоретически это может быть другой тип силы — например, если вы вообразите, что наш мяч металлический, размещение магнита рядом с коробкой может сдвинуть мяч так, что он ударится о другую стену.Это было сказано, чтобы доказать, что по сути акселерометр измеряет силу, а не ускорение. Просто так случается, что ускорение вызывает инерционную силу, которая улавливается механизмом определения силы акселерометра.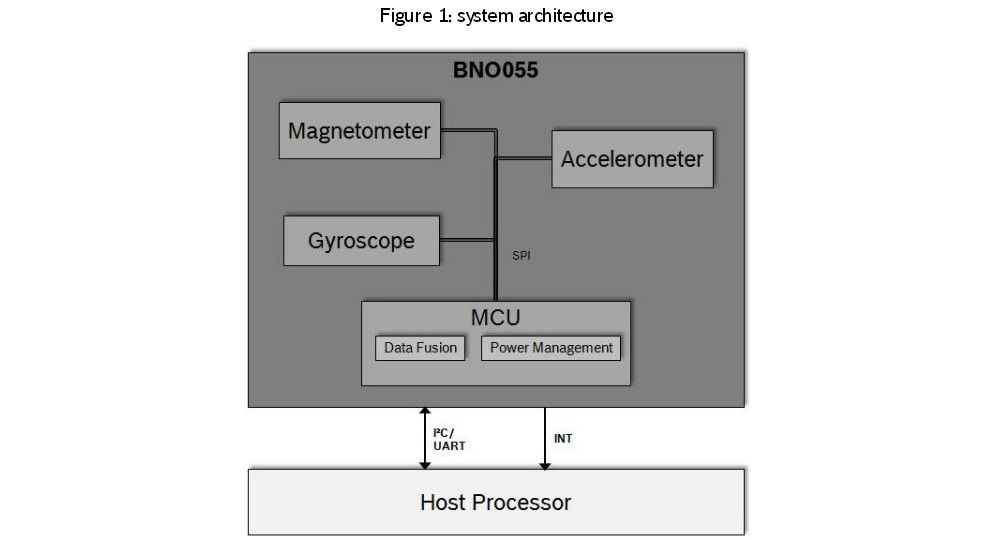
Хотя эта модель не совсем такая, как датчик MEMS, она часто бывает полезна при решении проблем, связанных с акселерометром. На самом деле существуют аналогичные датчики с металлическими шариками внутри, они называются переключателями наклона, однако они более примитивны и обычно могут только определить, наклонено ли устройство в пределах некоторого диапазона или нет, но не степень наклона.
До сих пор мы анализировали выходной сигнал акселерометра на одной оси, и это все, что вы получите с одноосными акселерометрами. Настоящая ценность трехосных акселерометров заключается в том, что они могут обнаруживать силы инерции по всем трем осям. Вернемся к нашей блочной модели и повернем коробку на 45 градусов вправо. Теперь мяч коснется 2 стен: Z- и X-, как показано на рисунке ниже:
Значения 0,71 не произвольны, они фактически являются приближением для SQRT (1/2).Это станет более ясным, когда мы представим нашу следующую модель акселерометра.
В предыдущей модели мы зафиксировали силу гравитации и повернули наш воображаемый ящик. В последних двух примерах мы проанализировали выходной сигнал в двух разных положениях бокса, в то время как вектор силы оставался постоянным. Хотя это было полезно для понимания того, как акселерометр взаимодействует с внешними силами, более практично выполнять вычисления, если мы зафиксируем систему координат на осях акселерометра и представим, что вектор силы вращается вокруг нас.
В последних двух примерах мы проанализировали выходной сигнал в двух разных положениях бокса, в то время как вектор силы оставался постоянным. Хотя это было полезно для понимания того, как акселерометр взаимодействует с внешними силами, более практично выполнять вычисления, если мы зафиксируем систему координат на осях акселерометра и представим, что вектор силы вращается вокруг нас.
Пожалуйста, взгляните на модель выше, я сохранил цвета осей, чтобы вы могли мысленно перейти от предыдущей модели к новой. Только представьте, что каждая ось в новой модели перпендикулярна соответствующим граням коробки в предыдущей модели. Вектор R — это вектор силы, который измеряет акселерометр (это может быть либо сила гравитации, либо сила инерции из приведенных выше примеров, либо их комбинация). Rx, Ry, Rz — проекции вектора R на оси X, Y, Z.2
, просто подставив R = 1, Rx = -SQRT (1/2), Ry = 0, Rz = -SQRT (1/2) в Eq.1
После долгой теоретической преамбулы мы приближаемся к реальным акселерометрам. Значения Rx, Ry, Rz фактически линейно связаны со значениями, которые выводит ваш реальный акселерометр и которые вы можете использовать для выполнения различных вычислений.
Значения Rx, Ry, Rz фактически линейно связаны со значениями, которые выводит ваш реальный акселерометр и которые вы можете использовать для выполнения различных вычислений.
Прежде чем мы перейдем к делу, давайте немного поговорим о том, как акселерометры передают нам эту информацию. Большинство акселерометров делятся на две категории: цифровые и аналоговые.Цифровые акселерометры предоставят вам информацию с использованием последовательного протокола, такого как I2C, SPI или USART, в то время как аналоговые акселерометры будут выводить уровень напряжения в заранее определенном диапазоне, который вам необходимо преобразовать в цифровое значение с помощью модуля АЦП (аналого-цифрового преобразователя). Я не буду вдаваться в подробности того, как работает ADC, отчасти потому, что это такая обширная тема, а отчасти потому, что она отличается от одной платформы к другой. Некоторые микроконтроллеры будут иметь встроенные модули АЦП, некоторым из них потребуются внешние компоненты для выполнения преобразований АЦП. 12 -1.
12 -1.
Применяя эту формулу ко всем 3 каналам, получаем:
Вольт Rx = 586 * 3,3 В / 1023 = ~ 1,89 В (мы округляем все результаты до 2 десятичных знаков)
ВольтRy = 630 * 3,3 В / 1023 = ~ 2,03 В
Вольт Rz = 561 * 3,3 В / 1023 = ~ 1,81 В
Каждый акселерометр имеет нулевой уровень напряжения, его можно найти в спецификациях, это напряжение, которое соответствует 0g. Чтобы получить значение напряжения со знаком, нам нужно рассчитать сдвиг от этого уровня. Допустим, наш уровень напряжения 0g равен VzeroG = 1,65 В.2), для окончательного преобразования мы применяем чувствительность акселерометра, обычно выражаемую в мВ / г. Допустим, наша чувствительность = 478,5 мВ / г = 0,4785 В / г. Значения чувствительности можно найти в технических характеристиках акселерометра. Чтобы получить окончательные значения силы, выраженные в g, мы используем следующую формулу:
Rx = DeltaVoltsRx / Чувствительность
Rx = 0,24 В / 0,4785 В / г = ~ 0,5 г
Ry = 0,38 В / 0,4785 В / г = ~ 0,79 г
Rz = 0,16 В / 0,4785 В / г = ~ 0,33 г
Мы, конечно, могли бы объединить все шаги в одной формуле, но я прошел все шаги, чтобы было понятно, как вы переходите от показаний АЦП к компоненту вектора силы, выраженному в g.
Rx = (AdcRx * Vref / 1023 — VzeroG) / Чувствительность (Eq.2 )
Ry = (AdcRy * Vref / 1023 — VzeroG) / Чувствительность
Rz = (AdcRz * Vref / 1023 — VzeroG) / Чувствительность
Теперь у нас есть все 3 компонента, которые определяют вектор нашей силы инерции. Если на устройство не действуют другие силы, кроме гравитации, мы можем предположить, что это направление нашего вектора силы гравитации. Если вы хотите рассчитать наклон устройства относительно земли, вы можете рассчитать угол между этим вектором и осью Z.Если вас также интересует направление наклона для каждой оси, вы можете разделить этот результат на 2 компонента: наклон по осям X и Y, который можно рассчитать как угол между вектором гравитации и осями X / Y. Вычислить эти углы проще, чем вы думаете, теперь, когда мы рассчитали значения для Rx, Ry и Rz. Вернемся к нашей последней модели акселерометра и сделаем несколько дополнительных обозначений:
Нас интересуют углы между осями X, Y, Z и вектором силы R. 2).
2).
Теперь мы можем найти наши углы, используя функцию arccos () (обратная функция cos ()):
Axr = arccos (Rx / R)
Ayr = arccos (Ry / R)
Azr = arccos (Rz / R)
Мы прошли долгий путь, чтобы объяснить модель акселерометра, просто чтобы прийти к этим формулам. В зависимости от ваших приложений вы можете использовать любые полученные нами промежуточные формулы. Мы также скоро представим модель гироскопа и увидим, как данные акселерометра и гироскопа могут быть объединены, чтобы обеспечить еще более точные оценки наклона.2) = 1
Это хорошее свойство, так как оно освобождает нас от контроля модуля (длины) вектора R. Часто, если нас просто интересует направление нашего инерциального вектора, имеет смысл нормализовать его модуль, чтобы упростить другие вычисления.
Часть 2. Гироскоп
Мы не собираемся вводить какую-либо эквивалентную коробочную модель для гироскопа, как мы это сделали для акселерометра, вместо этого мы собираемся сразу перейти ко второй модели акселерометра и покажем, что гироскоп измеряет в соответствии с этой моделью. 2, это можно вывести из Eq.2
2, это можно вывести из Eq.2
Мы не собираемся использовать эти формулы в этой статье, но полезно отметить взаимосвязь между всеми значениями в нашей модели.
Вместо этого мы собираемся определить угол между осью Z и векторами Rxz, Ryz следующим образом:
Axz — угол между Rxz (проекция R на плоскость XZ) и осью Z
Ayz — угол между Ryz (проекция R на плоскость YZ) и осью Z
Теперь мы приближаемся к тому, что измеряет гироскоп. Гироскоп измеряет скорость изменения углов, определенных выше.Другими словами, он выдаст значение, которое линейно связано со скоростью изменения этих углов. Чтобы объяснить это, давайте предположим, что мы измерили угол поворота вокруг оси Y (это был бы угол Axz) в момент времени t0, и мы определяем его как Axz0, затем мы измерили этот угол в более позднее время t1, и это был Axz1. Скорость изменения будет рассчитана следующим образом:
RateAxz = (Axz1 — Axz0) / (t1 — t0).
Если выразить Axz в градусах, а время в секундах, то это значение будет выражено в градусах / с. Это то, что измеряет гироскоп.
Это то, что измеряет гироскоп.
На практике гироскоп (за исключением специального цифрового гироскопа) редко дает значение, выраженное в градусах / с. Как и для акселерометра, вы получите значение АЦП, которое вам нужно будет преобразовать в град / с, используя формулу, аналогичную Eq. 2 , который мы определили для акселерометра. Давайте представим формулу преобразования АЦП в градусы / с для гироскопа (мы предполагаем, что мы используем 10-битный модуль АЦП, для 8-битного АЦП замените 1023 на 255, для 12-битного АЦП замените 1023 на 4095).
RateAxz = (AdcGyroXZ * Vref / 1023 — VzeroRate) / Чувствительность Eq.3
RateAyz = (AdcGyroYZ * Vref / 1023 — VzeroRate) / Чувствительность
AdcGyroXZ, AdcGyroYZ — получены из нашего модуля adc, и они представляют каналы, которые измеряют вращение проекции вектора R в XZ соответственно в плоскостях YZ, что эквивалентно тому, что вращение было выполнено вокруг осей Y и X соответственно.
Vref — это Опорное напряжение АЦП мы будем использовать 3.3V в примере ниже
VzeroRate — это напряжение с нулевой скоростью, другими словами напряжение, которое выдает гироскоп, когда он не подвержен никакому вращению, для платы Acc_Gyro это например 1.23 В (вы можете найти эти значения в спецификациях, но не верьте спецификациям, большинство гироскопов будут иметь небольшое смещение после пайки, поэтому измерьте VzeroRate для каждого выхода оси с помощью вольтметра, обычно это значение не будет меняться со временем после того, как гироскоп был припаян, если он изменяется — напишите процедуру калибровки, чтобы измерить его перед запуском устройства, пользователь должен быть проинструктирован, чтобы устройство оставалось в неподвижном положении при запуске для калибровки гироскопов).
Чувствительность — это чувствительность вашего гироскопа, она выражается в мВ / (град / с), часто записывается как мВ / град / с, в основном это говорит вам, на сколько мВ увеличится выход гироскопа, если вы увеличите скорость вращения на единицу. град / с.Чувствительность платы Acc_Gyro составляет, например, 2 мВ / град / с или 0,002 В / град / с
град / с.Чувствительность платы Acc_Gyro составляет, например, 2 мВ / град / с или 0,002 В / град / с
Давайте возьмем пример, предположим, что наш модуль ADC вернул следующие значения:
AdcGyroXZ = 571
AdcGyroXZ = 323
Используя приведенную выше формулу и параметры спецификации платы Acc_Gyro, мы получим:
RateAxz = (571 * 3,3 В / 1023 — 1,23 В) / (0,002 В / град / с) = ~ 306 град / с
RateAyz = (323 * 3,3 В / 1023 — 1,23 В) / (0,002 В / град / с) = ~ -94 град / с
Другими словами, устройство вращается вокруг оси Y (или мы можем сказать, что оно вращается в плоскости XZ) со скоростью 306 град / с и вокруг оси X (или мы можем сказать, что оно вращается в плоскости YZ) со скоростью -94 град / с.Обратите внимание, что отрицательный знак означает, что устройство вращается в противоположном направлении от обычного положительного направления. Условно одно направление вращения положительное. Хороший лист технических характеристик гироскопа покажет вам, какое направление является положительным, в противном случае вам придется найти его, поэкспериментировав с устройством и отметив, какое направление вращения приводит к увеличению напряжения на выходном контакте.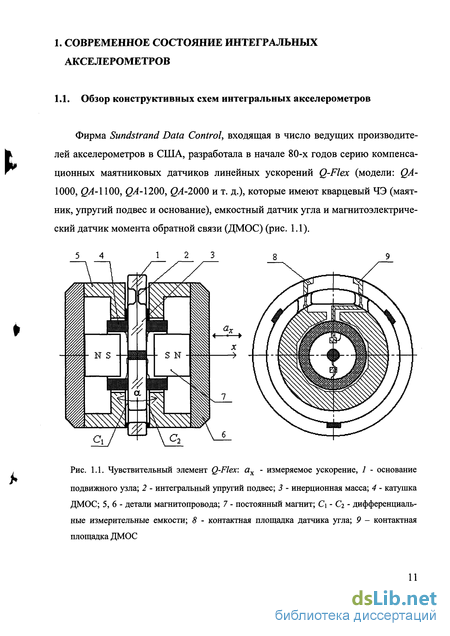 Лучше всего это делать с помощью осциллографа, поскольку, как только вы остановите вращение, напряжение снова упадет до нулевого уровня.Если вы используете мультиметр, вам нужно поддерживать постоянную скорость вращения в течение как минимум нескольких секунд и отмечать напряжение во время этого вращения, а затем сравнивать его с напряжением с нулевой скоростью. Если оно больше нулевого напряжения, это означает, что направление вращения положительное.
Лучше всего это делать с помощью осциллографа, поскольку, как только вы остановите вращение, напряжение снова упадет до нулевого уровня.Если вы используете мультиметр, вам нужно поддерживать постоянную скорость вращения в течение как минимум нескольких секунд и отмечать напряжение во время этого вращения, а затем сравнивать его с напряжением с нулевой скоростью. Если оно больше нулевого напряжения, это означает, что направление вращения положительное.
Часть 3. Собираем все вместе. Объединение данных акселерометра и гироскопа.
Если вы читаете эту статью, вы, вероятно, приобрели или планируете приобрести устройство IMU, или, возможно, вы планируете построить его из отдельных устройств акселерометра и гироскопа.
ПРИМЕЧАНИЕ: ДЛЯ ПРАКТИЧЕСКОЙ РЕАЛИЗАЦИИ И ТЕСТИРОВАНИЯ ДАННОГО АЛГОРИТМА ПРОЧИТАЙТЕ ДАННУЮ СТАТЬЮ:
http://starlino.com/imu_kalman_arduino.html
Первым шагом в использовании комбинированного устройства IMU, которое объединяет акселерометр и гироскоп, является выравнивание их систем координат. Самый простой способ сделать это состоит в выборе системы координат акселерометра в качестве эталонной системы координат. В большинстве таблиц данных акселерометра отображается направление осей X, Y, Z относительно изображения физического чипа или устройства.Например, вот направления осей X, Y, Z, как показано в спецификациях для платы Acc_Gyro:
Самый простой способ сделать это состоит в выборе системы координат акселерометра в качестве эталонной системы координат. В большинстве таблиц данных акселерометра отображается направление осей X, Y, Z относительно изображения физического чипа или устройства.Например, вот направления осей X, Y, Z, как показано в спецификациях для платы Acc_Gyro:
Следующие шаги:
— определяет выходы гироскопа, которые соответствуют значениям RateAxz, RateAyz, рассмотренным выше.
— определить, нужно ли эти выходы инвертировать из-за физического положения гироскопа относительно акселерометра
Не предполагайте, что если гироскоп имеет выход, помеченный X или Y, он будет соответствовать любой оси в системе координат акселерометра, даже если этот выход является частью блока IMU.Лучший способ — это проверить.
Вот пример последовательности для определения того, какой выходной сигнал гироскопа соответствует значению RateAxz, описанному выше.
— начните с размещения устройства в горизонтальном положении. Оба выхода акселерометра X и Y будут выводить напряжение нулевого ускорения (например, для платы Acc_Gyro это 1,65 В)
— затем начните вращать устройство вокруг оси Y, другой способ сказать, что вы вращаете устройство в XZ плоскости, так что выходы акселерометра X и Z изменяются, а выход Y остается постоянным.
— при вращении устройства с постоянной скоростью обратите внимание, какой выходной сигнал гироскопа изменяется, другие выходы гироскопа должны оставаться постоянными.
— выходной сигнал гироскопа, который изменился во время вращения вокруг оси Y (вращение в плоскости XZ), предоставит входное значение для AdcGyroXZ, из которого мы вычисляем RateAxz
— последний шаг — убедиться, что направление вращения соответствует нашей модели, в некоторых случаях вам может потребоваться инвертировать значение RateAxz из-за физического положения гироскопа относительно акселерометра
— повторите вышеуказанный тест, вращая устройство вокруг оси Y, на этот раз следите за выходом X акселерометра (AdcRx в нашей модели). Если AdcRx растет (первые 90 градусов поворота от горизонтального положения), то AdcGyroXZ должен уменьшаться. Это связано с тем, что мы отслеживаем вектор гравитации, и когда устройство вращается в одном направлении, вектор будет вращаться в противоположном направлении (относительно системы координат устройства, которую мы используем). Итак, в противном случае вам нужно инвертировать RateAxz, вы можете добиться этого, введя знаковый фактор в Eq.3 , как показано ниже:
Если AdcRx растет (первые 90 градусов поворота от горизонтального положения), то AdcGyroXZ должен уменьшаться. Это связано с тем, что мы отслеживаем вектор гравитации, и когда устройство вращается в одном направлении, вектор будет вращаться в противоположном направлении (относительно системы координат устройства, которую мы используем). Итак, в противном случае вам нужно инвертировать RateAxz, вы можете добиться этого, введя знаковый фактор в Eq.3 , как показано ниже:
RateAxz = InvertAxz * (AdcGyroXZ * Vref / 1023 — VzeroRate) / Sensitivity, где InvertAxz равно 1 или -1
такой же тест можно провести для RateAyz, вращая устройство вокруг оси X, и вы можете определить, какой выход гироскопа соответствует RateAyz, и нужно ли его инвертировать.Получив значение InvertAyz, вы должны использовать следующую формулу для расчета RateAyz:
RateAyz = InvertAyz * (AdcGyroYZ * Vref / 1023 — VzeroRate) / Чувствительность
Если вы проведете эти тесты на плате Acc_Gyro, вы получите следующие результаты:
— выходной контакт для RateAxz — GX4, а InvertAxz = 1
— выходной контакт для RateAyz — GY4 и InvertAyz = 1
С этого момента мы будем считать, что вы настроили свой IMU таким образом, чтобы вы могли рассчитывать правильные значения для Axr, Ayr, Azr (как определено в Части 1. Акселерометр) и RateAxz, RateAyz (как определено в Части 2. Гироскоп). Далее мы проанализируем отношения между этими значениями, которые окажутся полезными для получения более точной оценки наклона устройства относительно плоскости заземления.
Акселерометр) и RateAxz, RateAyz (как определено в Части 2. Гироскоп). Далее мы проанализируем отношения между этими значениями, которые окажутся полезными для получения более точной оценки наклона устройства относительно плоскости заземления.
Вы можете спросить себя к этому моменту, если модель акселерометра уже дала нам углы наклона Axr, Ayr, Azr, зачем нам беспокоиться о данных гироскопа? Ответ прост: данным акселерометра не всегда можно доверять на 100%.Есть несколько причин, помните, что акселерометр измеряет силу инерции, такая сила может быть вызвана гравитацией (и в идеале только гравитацией), но она также может быть вызвана ускорением (движением) устройства. В результате, даже если акселерометр находится в относительно стабильном состоянии, он по-прежнему очень чувствителен к вибрации и механическому шуму в целом. Это основная причина, по которой большинство систем IMU используют гироскоп для сглаживания любых ошибок акселерометра. Но как это сделать? И свободен ли гироскоп от шума?
Гироскоп не свободен от шума, однако, поскольку он измеряет вращение, он менее чувствителен к линейным механическим движениям, типу шума, от которого страдает акселерометр, однако у гироскопов есть другие типы проблем, такие как, например, дрейф (не возвращается к нулевой скорости значение при остановке вращения). Тем не менее, усредняя данные, поступающие с акселерометра и гироскопа, мы можем получить относительно лучшую оценку текущего наклона устройства, чем мы могли бы получить, используя только данные акселерометра.
Тем не менее, усредняя данные, поступающие с акселерометра и гироскопа, мы можем получить относительно лучшую оценку текущего наклона устройства, чем мы могли бы получить, используя только данные акселерометра.
В следующих шагах я представлю алгоритм, вдохновленный некоторыми идеями, использованными в фильтре Калмана, однако он намного проще и легче реализовать на встроенных устройствах. Перед этим давайте сначала посмотрим, что мы хотим, чтобы наш алгоритм вычислял. Ну, это направление вектора силы гравитации R = [Rx, Ry, Rz], из которого мы можем получить другие значения, такие как Axr, Ayr, Azr или cosX, cosy, cosZ, которые дадут нам представление о наклоне нашего устройства. Относительно плоскости земли мы обсудим связь между этими значениями в Части 1.Можно сказать — разве у нас уже нет этих значений Rx, Ry, Rz из Eq.2 в Части 1? Ну да, но помните, что эти значения получены только из данных акселерометра, поэтому, если вы собираетесь использовать их непосредственно в своем приложении, вы можете получить больше шума, чем ваше приложение может выдержать. Чтобы избежать дальнейшей путаницы, давайте переопределим измерения акселерометра следующим образом:
Чтобы избежать дальнейшей путаницы, давайте переопределим измерения акселерометра следующим образом:
Racc — вектор инерционной силы, измеренный акселерометром, который состоит из следующих составляющих (проекций на оси X, Y, Z):
RxAcc = (AdcRx * Vref / 1023 — VzeroG) / Чувствительность
RyAcc = (AdcRy * Vref / 1023 — VzeroG) / Чувствительность
RzAcc = (AdcRz * Vref / 1023 — VzeroG) / Чувствительность
На данный момент у нас есть набор измеренных значений, которые мы можем получить исключительно из значений АЦП акселерометра.2),
Однако для уверенности имеет смысл обновить этот вектор следующим образом:
Racc (нормализованный) = [RxAcc / | Racc | , RyAcc / | Racc | , RzAcc / | Racc |].
Это гарантирует, что длина нормализованного вектора Racc всегда равна 1.
Далее мы представим новый вектор и назовем его
.Остальное = [RxEst, RyEst, RzEst]
Это будет выход нашего алгоритма, это скорректированные значения, основанные на данных гироскопа и на основе прошлых оценочных данных.
Вот что будет делать наш алгоритм:
— акселерометр сообщает нам: «Вы сейчас находитесь в позиции Racc»
— мы говорим «Спасибо, но позвольте мне проверить»,
— затем исправьте эту информацию с помощью данных гироскопа, а также с помощью прошлых данных Rest, и мы выводим новый оценочный вектор Rest.
— мы считаем Rest нашим «лучшим выбором» относительно текущего положения устройства.
Давайте посмотрим, как мы можем заставить его работать.
Мы начнем нашу последовательность, доверяя нашему акселерометру и назначив:
Отдых (0) = Racc (0)
Между прочим, помните, что Rest и Racc являются векторами, поэтому приведенное выше уравнение представляет собой простой способ написать 3 набора уравнений и избежать повторений:
RxEst (0) = RxAcc (0)
RyEst (0) = RyAcc (0)
RzEst (0) = RzAcc (0)
Затем мы будем проводить регулярные измерения с равными интервалами времени T секунд, и мы получим новые измерения, которые мы определим как Racc (1), Racc (2), Racc (3) и так далее. Мы также будем выпускать новые оценки через каждый временной интервал Отдых (1), Отдых (2), Отдых (3) и так далее.
Мы также будем выпускать новые оценки через каждый временной интервал Отдых (1), Отдых (2), Отдых (3) и так далее.
Предположим, мы на шаге n. У нас есть два известных набора значений, которые мы хотели бы использовать:
Rest (n-1) — наша предыдущая оценка, с Rest (0) = Racc (0)
Racc (n) — наше текущее измерение акселерометра
Прежде чем мы сможем вычислить Rest (n), давайте введем новое измеренное значение, которое мы можем получить с помощью нашего гироскопа и предыдущей оценки.
Назовем его Rgyro, он также представляет собой вектор, состоящий из 3-х компонентов:
Rgyro = [RxGyro, RyGyro, RzGyro]
Мы будем вычислять этот вектор по одному компоненту за раз.Начнем с RxGyro.
Давайте начнем с наблюдения следующего соотношения в нашей модели гироскопа, из прямоугольного треугольника, образованного Rz и Rxz, мы можем вывести это:
tan (Axz) = Rx / Rz => Axz = atan2 (Rx, Rz)
Atan2 может быть функцией, которую вы никогда раньше не использовали, она похожа на atan, за исключением того, что возвращает значения в диапазоне (-PI, PI) в отличие от (-PI / 2, PI / 2), возвращаемых atan, и принимает 2 аргумента вместо одного. Это позволяет нам преобразовывать два значения Rx, Rz в углы в полном диапазоне 360 градусов (-PI в PI).Вы можете узнать больше об atan2 здесь.
Это позволяет нам преобразовывать два значения Rx, Rz в углы в полном диапазоне 360 градусов (-PI в PI).Вы можете узнать больше об atan2 здесь.
Итак, зная RxEst (n-1) и RzEst (n-1), мы можем найти:
Axz (n-1) = atan2 (RxEst (n-1), RzEst (n-1)).
Помните, что гироскоп измеряет скорость изменения угла Axz. Таким образом, мы можем оценить новый угол Axz (n) следующим образом:
Axz (n) = Axz (n-1) + RateAxz (n) * T
Помните, что RateAxz можно получить из показаний АЦП нашего гироскопа. Более точная формула может использовать среднюю скорость вращения, рассчитанную следующим образом:
RateAxzAvg = (RateAxz (n) + RateAxz (n-1)) / 2
Axz (n) = Axz (n-1) + RateAxzAvg * T
Таким же образом находим:
Ayz (n) = Ayz (n-1) + RateAyz (n) * T
Хорошо, теперь у нас есть Axz (n) и Ayz (n).2).
Где Sign (RzGyro) = 1, когда RzGyro> = 0, и Sign (RzGyro) = -1, когда RzGyro <0.
Один простой способ оценить это — взять:
Знак (RzGyro) = Знак (RzEst (n-1))
На практике будьте осторожны, когда RzEst (n-1) близко к 0.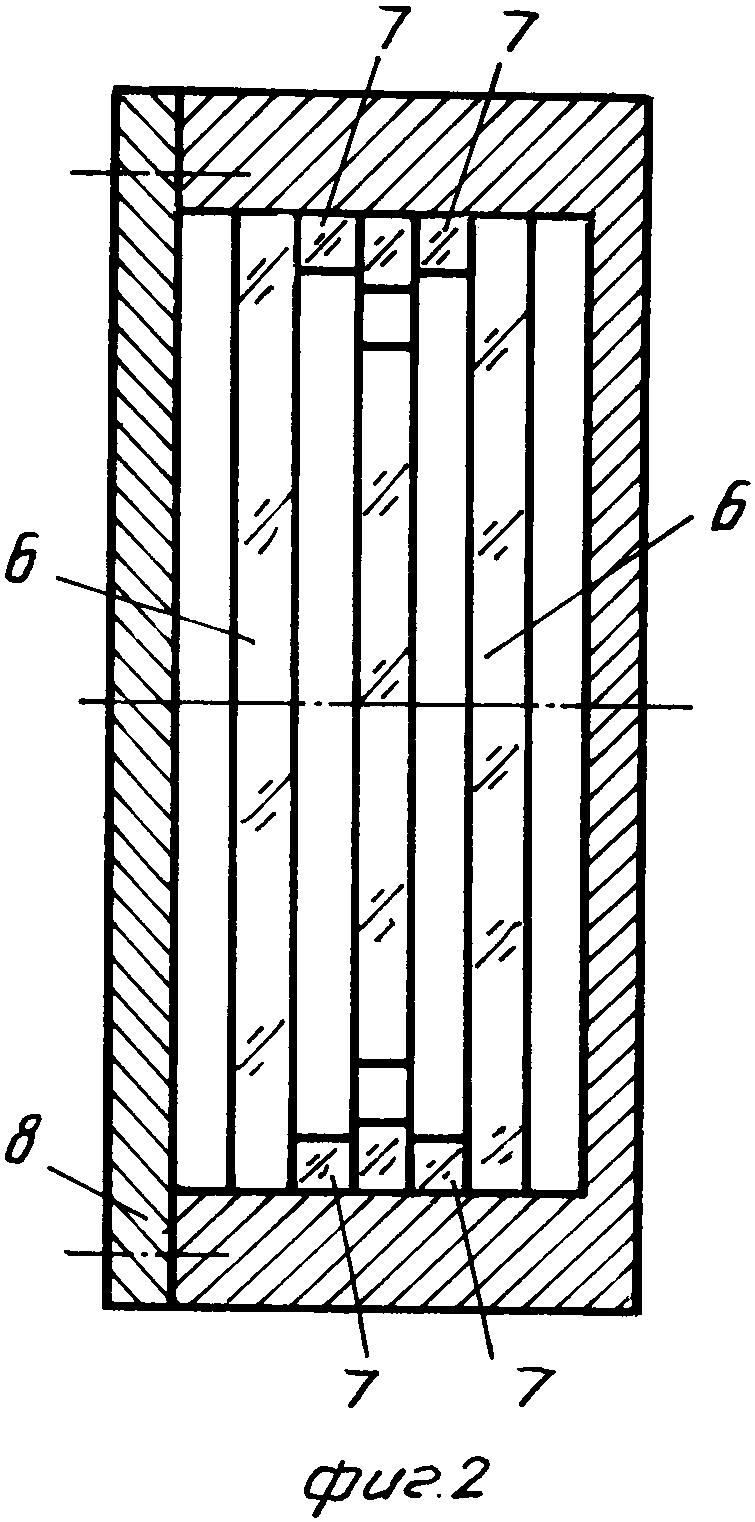 В этом случае вы можете полностью пропустить фазу гироскопа и назначить: Rgyro = Rest (n-1). Rz используется в качестве эталона для расчета углов Axz и Ayz, и когда он близок к 0, значения могут выходить за пределы и приводить к плохим результатам. Вы попадете в область больших чисел с плавающей запятой, где реализация функций tan () / atan () может не иметь точности.
В этом случае вы можете полностью пропустить фазу гироскопа и назначить: Rgyro = Rest (n-1). Rz используется в качестве эталона для расчета углов Axz и Ayz, и когда он близок к 0, значения могут выходить за пределы и приводить к плохим результатам. Вы попадете в область больших чисел с плавающей запятой, где реализация функций tan () / atan () может не иметь точности.
Итак, давайте подведем итоги того, что у нас есть до сих пор, мы находимся на этапе n нашего алгоритма, и мы рассчитали следующие значения:
Racc — текущие показания нашего акселерометра
Rgyro — полученные от Rest (n-1) и текущие показания гироскопа
Какие значения мы используем для расчета обновленной оценки Rest (n)? Вы, наверное, догадались, что мы будем использовать оба. Мы будем использовать средневзвешенное значение, так что:
Отдых (n) = (Racc * w1 + Rgyro * w2) / (w1 + w2)
Мы можем упростить эту формулу, разделив числитель и знаменатель дроби на w1.
Отдых (n) = (Racc * w1 / w1 + Rgyro * w2 / w1) / (w1 / w1 + w2 / w1)
и после подстановки w2 / w1 = wGyro получаем:
Отдых (n) = (Racc + Rgyro * wGyro) / (1 + wGyro)
В приведенной выше формуле wGyro говорит нам, насколько мы доверяем нашему гироскопу по сравнению с нашим акселерометром. Это значение может быть выбрано экспериментально. Обычно значения от 5 до 20 дают хорошие результаты.
Основное отличие этого алгоритма от фильтра Калмана состоит в том, что этот вес относительно фиксирован, тогда как в фильтре Калмана веса постоянно обновляются на основе измеренного шума показаний акселерометра.Фильтр Калмана нацелен на предоставление вам «лучших» теоретических результатов, тогда как этот алгоритм может дать вам результаты, «достаточно хорошие» для вашего практического применения. Вы можете реализовать алгоритм, который регулирует wGyro в зависимости от некоторых факторов шума, которые вы измеряете, но фиксированные значения будут хорошо работать для большинства приложений. 2)
2)
RxEst (n) = RxEst (n) / R
RyEst (n) = RyEst (n) / R
RzEst (n) = RzEst (n) / R
И мы готовы повторить наш цикл снова.
ПРИМЕЧАНИЕ: ДЛЯ ПРАКТИЧЕСКОЙ РЕАЛИЗАЦИИ И ТЕСТИРОВАНИЯ ДАННОГО АЛГОРИТМА ПРОЧИТАЙТЕ ДАННУЮ СТАТЬЮ:
http://starlino.com/imu_kalman_arduino.html
Другие ресурсы по акселерометру и гироскопу IMU Fusion:
http://www.mikroquad.com/pub/Research/ComplementaryFilter/filter.pdf
http://stackoverflow.com/questions/1586658/combine-gyroscope-and-accelerometer-data
http: // www.Dimensionengineering.com/accelerometers.htm
// старлино //
PPT — Как измерить ускорение Презентация PowerPoint, скачать бесплатно
Как измерить ускорение Мммм… Разве в сумке нет акселерометра?
Как работает эта трубка? • Он называется акселерометром, но на самом деле он не измеряет ускорение. 3 2 1 0 1 2 3
3 2 1 0 1 2 3
Подсказка к тому, что он измеряет 3 2 • Поверните трубку так, чтобы она стояла вертикально.Теперь он измеряется по оси «от головы до пят». Когда вы стоите неподвижно, трубка выглядит так: • Что означает эта цифра «1»? • Нарисуйте диаграмму сил для человека, стоящего неподвижно. (2) • Насколько велика нормальная сила, действующая на человека у пола, по сравнению с силой тяжести, действующей на человека у земли? (3) 1 0 1 2 3
Вы правы? 3 2 FNPS 1 0 1 FGPE 2 3
Простое подтверждение того, что сообщает вам это устройство • Стой на месте.Держите трубку так, чтобы один конец был прямо перед вами. Теперь прибор производит измерения по оси «спереди назад». Трубка выглядит так: • На вашей диаграмме сил для человека, стоящего неподвижно, насколько велика сила, толкающая человека вперед или назад по сравнению с силой тяжести, действующей на человека? (4) 3 2 1 0 1 2 3
Вы правы? FNPS 3 2 1 0 1 2 3 FGPE
Более правильное название, чем «Акселерометр» • Устройство фактически является «измерителем фактора силы». • Показания на устройстве покажут вам величину толкающей или тянущей силы, действующей на вас, по сравнению с величиной силы тяжести, действующей на вас. • Ключом к правильному использованию является понимание того, какую силу он измеряет. • После получения показаний коэффициента силы ускорение можно определить, изучив диаграмму силы.
• Показания на устройстве покажут вам величину толкающей или тянущей силы, действующей на вас, по сравнению с величиной силы тяжести, действующей на вас. • Ключом к правильному использованию является понимание того, какую силу он измеряет. • После получения показаний коэффициента силы ускорение можно определить, изучив диаграмму силы.
Простой пример: • На Mr. Freeze всадник весом 45 кг ускоряется при движении вправо. Спрогнозируйте направление движения с помощью измерителя фактора силы. (5) 0 3 2 1 1 2 3
Пример (продолжение) • Измеритель силового фактора выглядит так, пока гонщик ускоряется.Нарисуйте диаграмму сил для всадника. (6) Проверь своего соседа! SF a v
Вы правы? FNPS FPPS 3 2 1 0 1 2 3 FGPE
Найдите ускорение! • Масса всадника 45 кг. Сколько весит всадник? (7) • Измеритель фактора силы показывает 2,2. Насколько велик толчок вперед человека, сидящего за сиденьем? (8) • Какова величина чистой силы, действующей на человека? (9) • Каково ускорение человека? (10)
Насколько велик толчок вперед человека, сидящего за сиденьем? (8) • Какова величина чистой силы, действующей на человека? (9) • Каково ускорение человека? (10)
Бонус! • Привет, парень, сидящий рядом с этим всадником, имел массу 90 кг.Как вы думаете, что показывает его измеритель фактора силы? (11)
Более жесткий пример 3 2 • На Screamin ’Eagle всадник весом 45 кг преодолевает гребень холма. Измеритель FF удерживается на оси «голова к пальцам». Предскажите показания счетчика. (12) • Нарисуйте диаграмму сил для всадника. (13) 1 SF 0 a 1 v 2 3
Вы правы? 3 2 • Можете ли вы рассчитать чистую силу, действующую на всадника? Ускорение всадника? 1 0 FGPE 1 2 3
Пример OMG 3 2 • На Ninja всадник весом 45 кг перевернулся вверх ногами в верхней части петли.Измеритель FF удерживается на оси «голова к пальцам».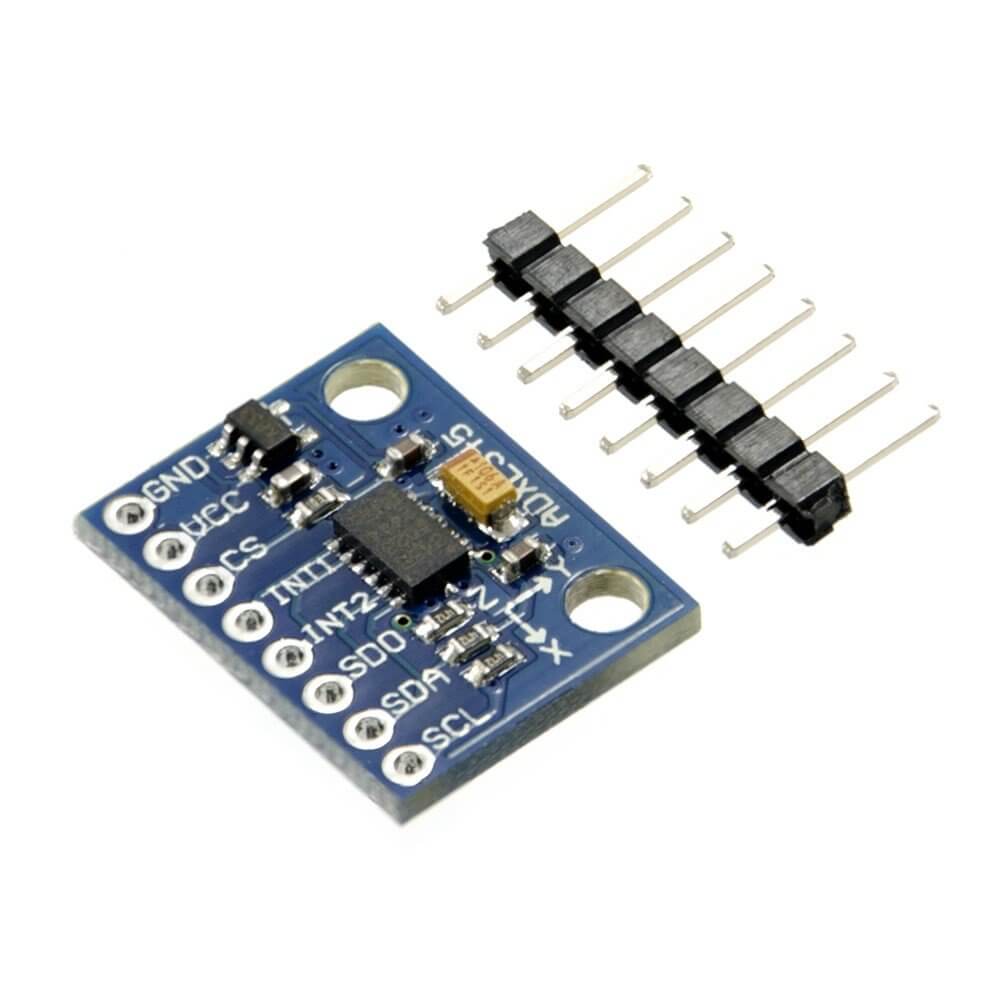 Предскажите показания счетчика. (14) • Нарисуйте диаграмму сил для всадника. (15) 1 SF 0 a 1 v 2 3
Предскажите показания счетчика. (14) • Нарисуйте диаграмму сил для всадника. (15) 1 SF 0 a 1 v 2 3
Система отсчета для проверки 3 2 • Прежде чем мы продолжим, обратите внимание, что с перевернутой точки зрения всадника измеритель FF движется «вниз» к его коленям. . • Значит, это значение FF соответствует силе, направленной в какую сторону? (16) 1 0 1 2 3
Вы правы? 3 2 FGPE • Можете ли вы рассчитать чистую силу, действующую на всадника? Ускорение всадника? 1 0 FNPS 1 2 3
Аэрокосмические акселерометры для мониторинга вибрации двигателя
Помогают вам сократить время простоя и повысить доступность вашего самолета
Чтобы обеспечить вам надежность и точность, необходимые для вашего двигателя, самолета, вертолета, БПЛА и космического применения, мы разработали наши акселерометры, чтобы оптимизировать конструкцию чувствительных элементов и элементов трансмиссии.
Они основаны на пьезоэлектрическом принципе: сила сжатия или сдвига, приложенная к пьезоэлектрическому материалу сейсмической массой, создает электрические заряды, пропорциональные приложенному виброускорению, без каких-либо движущихся частей.
Созданные на основе более чем 60-летнего опыта, эти высокоточные пьезоэлектрические акселерометры являются надежным выбором для широкого спектра аэрокосмических программ, от криогенных до турбин высокого давления. Подавляющее большинство современных транспортных самолетов полагаются на наши акселерометры для контроля состояния и исправности своих двигателей.
В Meggitt Switzerland мы можем предоставить вам проверенные решения для полных цепей измерения вибрации практически в любой аэрокосмической среде. Наш опыт свидетельствует о том, что для некоторых экстремальных применений в турбинной части конкретных двигателей мы лидируем на мировом рынке по производству датчиков, которые являются достаточно точными и надежными, чтобы соответствовать требованиям производителей.
Характеристики и преимущества
- Индивидуальный дизайн
- Герметичная конструкция
- Корпус из нержавеющей стали, титана или инконеля
- Экстремальные рабочие температуры (от -253 ° C до + 780 ° C)
- Точный сигнал для всех диапазонов частот
- Различные типы кабелей с низким уровнем шума для обеспечения надлежащей передачи сигнала во всем диапазоне температур
- Одно- и двухканальный RCC со встроенным испытательным элементом для преобразования зарядов в выходное напряжение или ток (от -54 ° C до 120 ° C).
Приложения
Наши аэрокосмические датчики вибрации идеально подходят для реактивных двигателей (гражданских и военных), вертолетов и космических приложений:
- Мониторинг газотурбинного двигателя, включая балансировку холода вентилятора двигателя (CFTB)
- Анализ вибрации конструкции планера
- Анализ коробки передач
- Анализ подшипников
- Системы мониторинга работоспособности и использования (HUMS)
- Трим и балансировка ротора
- Балансировка винта
- Контроль вспомогательной силовой установки
- Криогенные среды для космических приложений.
Как работает акселерометр?
Электрические заряды, генерируемые чувствительным элементом акселерометра, необходимо преобразовать в выходной сигнал напряжения или тока для дальнейшей обработки. В зависимости от области применения, это выполняется либо непосредственно внутри акселерометра (встроенный пьезоэлектрик — стандарт IEPE), либо дальше по цепи измерения (для мест с высокой температурой). В этом случае необходимо использовать специальный «малошумящий» кабель для надежной передачи электрических зарядов до удаленного преобразователя заряда (RCC).
В Meggitt мы можем предоставить вам решение для измерения и мониторинга, которое является специфическим для вашего аэрокосмического приложения и может быть дополнительно адаптировано к вашим конкретным требованиям. Чтобы обсудить то, что вам нужно более подробно, свяжитесь с нами .
Акселерометр-датчик, рабочий, типы, характеристики, выбор, применение
Что такое акселерометр?
Акселерометр — это датчик , который используется для измерения физического или измеряемого ускорения, создаваемого объектом. Координатное ускорение нельзя измерить с помощью этого устройства. (См .: Датчик ускорения )
Координатное ускорение нельзя измерить с помощью этого устройства. (См .: Датчик ускорения )
Акселерометр
Акселерометр — это электромеханическое устройство, которое используется для измерения удельной силы объекта, силы, получаемой из-за явления веса, оказываемого объектом, которое удерживается в системе отсчета акселерометра.
В случае статического ускорения устройство в основном используется для определения степени наклона объекта по отношению к земле.При динамическом ускорении можно предвидеть движение объекта.
Рабочий
Чаще всего используется пьезоэлектрический акселерометр. Как следует из названия, использует принцип пьезоэлектрического эффекта . Устройство состоит из пьезоэлектрического кристалла кварца, к которому приложена ускоряющая сила, значение которой необходимо измерить.
Благодаря особому самогенерирующему свойству кристалл вырабатывает напряжение, пропорциональное ускоряющей силе.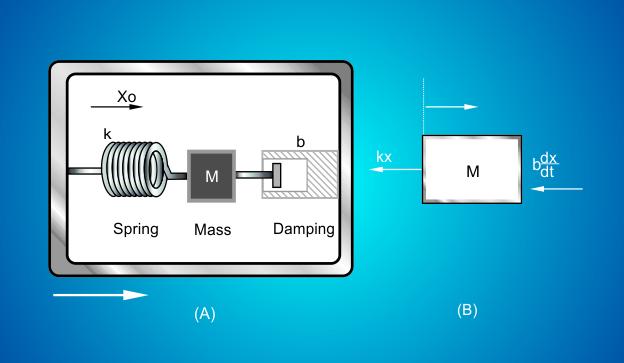 Рабочее и базовое устройство показано на рисунке ниже.
Рабочее и базовое устройство показано на рисунке ниже.
- Пьезоэлектрический акселерометр
Поскольку устройство находит свое применение в качестве высокоточного устройства для измерения вибрации, его также называют датчиком вибрации. Датчики вибрации используются для измерения вибрации подшипников тяжелого оборудования и напорных трубопроводов. Пьезоэлектрический акселерометр можно разделить на два. Это акселерометр с высоким выходным сопротивлением и акселерометр с низким сопротивлением.
В случае устройства с высоким импедансом выходное напряжение, генерируемое пропорционально ускорению, подается на вход других измерительных приборов. Процесс контрольно-измерительной аппаратуры и формирование сигнала на выходе считается высоким, и поэтому устройство с низким импедансом не может быть использовано для этого приложения. Это устройство используется при температурах выше 120 градусов Цельсия.
Акселерометр с низким импедансом вырабатывает ток из-за генерируемого выходного напряжения, и этот заряд передается на полевой транзистор, чтобы преобразовать заряд в выходной сигнал с низким сопротивлением. Этот тип акселерометров чаще всего используется в промышленных приложениях.
Этот тип акселерометров чаще всего используется в промышленных приложениях.
Типы
В промышленных приложениях наиболее часто используемые компоненты для преобразования механического воздействия в соответствующий электрический выходной сигнал являются пьезоэлектрическими, пьезорезистивными и емкостными по своей природе. Пьезоэлектрические устройства более предпочтительны в тех случаях, когда они используются при очень высоких температурах, при простом монтаже, а также в диапазоне высоких частот до 100 килогерц. Пьезорезистивные устройства используются при резких и сильных вибрациях.Емкостные акселерометры предпочтительны в таких приложениях, как сенсорный материал, обработанный на микрокристаллической основе, и могут работать на частотах до 1 килогерца. Все эти устройства известны своей очень высокой стабильностью и линейностью.
В настоящее время используется новый тип акселерометра под названием Micro-Electro-Mechanical System (MEMS) Accelerometer , поскольку он простой, надежный и очень экономичный. Он состоит из консольной балки и сейсмической массы, которая отклоняется из-за приложенного ускорения.Это отклонение измеряется с использованием аналоговых или цифровых методов и будет мерой приложенного ускорения.
Он состоит из консольной балки и сейсмической массы, которая отклоняется из-за приложенного ускорения.Это отклонение измеряется с использованием аналоговых или цифровых методов и будет мерой приложенного ускорения.
Характеристики акселерометра
- Частотная характеристика — этот параметр можно узнать, проанализировав свойства используемого кристалла кварца, а также резонансную частоту устройства.
- Заземление акселерометра — Заземление может быть в двух режимах. Один из них называется акселерометром с заземленным корпусом, который имеет низкую сторону сигнала, подключенную к их сердечнику.Это устройство чувствительно к помехам от земли. Акселерометр с изоляцией заземления — это электрическое устройство, находящееся отдельно от корпуса. Такое устройство подвержено шумам от земли.
- Резонансная частота — Следует отметить, что резонансная частота всегда должна быть выше частотной характеристики.
- Рабочая температура — акселерометр имеет диапазон температур от -50 градусов Цельсия до 120 градусов Цельсия.
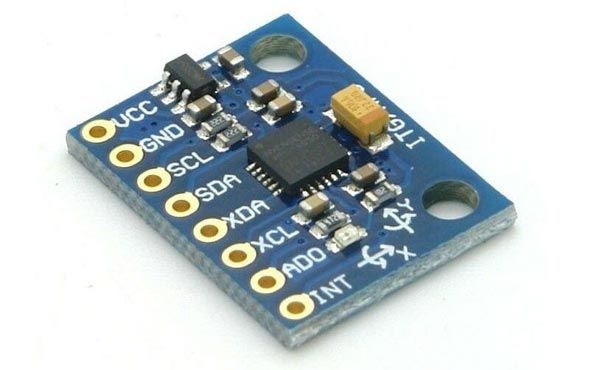 Такой диапазон можно получить только при аккуратной установке устройства.
Такой диапазон можно получить только при аккуратной установке устройства. - Чувствительность — Устройство должно быть сконструировано таким образом, чтобы иметь более высокую чувствительность. То есть даже при небольшой ускоряющей силе выходной электрический сигнал должен быть очень высоким. Таким образом, можно легко измерить высокий сигнал, и он будет точным.
- Axis — для большинства промышленных приложений требуется только 2-осевой акселерометр. Но если вы хотите использовать 3D-позиционирование, вам понадобится 3-осевой акселерометр.
- Аналоговый / цифровой выход — Вы должны проявлять особую осторожность при выборе типа выхода для устройства.Аналоговый выход будет в виде небольших изменяющихся напряжений, а цифровой выход будет в режиме ШИМ.
Выбор устройства
Выбор устройства зависит от следующих факторов.
- Выбор зависит от нужного вам диапазона частот.
- Зависит от размера и формы объекта, ускорение которого необходимо измерить.
- Неважно, грязная или чистая среда измерения.
- Зависит от измеряемого диапазона вибрации.
- Зависит от диапазона температур, в котором устройству придется работать.
- Зависит от того, должно ли устройство быть заземленным или изолированным.
Приложения
- Контроль машин.
- Используется для измерения землетрясений и афтершоков.
- Используется для измерения глубины сжатия грудной клетки при СЛР.
- Используется во внутренней навигационной системе (INS). То есть измерение положения, ориентации и скорости движущегося объекта без использования какой-либо внешней ссылки.
- Используется для стрельбы из подушек безопасности в автомобилях и контроля устойчивости транспортных средств.
- Используется в видеоиграх, таких как PlayStation 3, чтобы сделать рулевое управление более управляемым, естественным и реальным.
- Используется в видеокамере для стабилизации изображений.
Направляющая для датчика акселерометра
Обзор
Акселерометрымогут использоваться для измерения ускорения устройства и определения ориентация. Датчик измеряет ускорение по 3 ортогональным осям: X , Y и Z .
Краткое знакомство с топорами
Ось X параллельна экрану устройства, выровнена по верху и нижние края в направлении влево-вправо. Ось Y параллельна оси экран устройства, выровненный по левому и правому краям, вверху-внизу направление. Ось Z перпендикулярна экрану устройства и направлена вверх.
Ускорение включает ускорение свободного падения. Итак, если устройство находится в состоянии покоя, лежа на столе, ускорение по оси Z должно равняться ускорение свободного падения ( ~ 9.2.
Определение текущего показания акселерометра
Если вам нужно проверить последние показания акселерометра, вы можете получить доступ к
свойства непосредственно из объекта акселерометра с использованием при чтении
событие.
По умолчанию частота дискретизации акселерометра составляет 100 Гц (100 раз на второй).
импорт {Акселерометр} из "акселерометра";
if (Акселерометр) {
const Accelerometer = новый акселерометр ({частота: 1});
аксел.addEventListener ("чтение", () => {
console.log (
`ts: $ {Accel.timestamp}, \
x: $ {Accel.x}, \
y: $ {Accel.y}, \
z: $ {Accel.z} `
);
});
Accel.start ();
}
Пакетные показания
Accelerometer API также может генерировать пакеты данных по заданной выборке. ставка. Это позволяет разработчику контролировать частоту, с которой его приложение получает и обрабатывает данные датчиков.
Событие onreading выдается, когда доступен пакет показаний, и
.readings свойство содержит показания датчика с каждым каналом данных ( x ,
y , z и timestamp ) как отдельный массив.
