Что представляет собой энкодер. Как работают оптические и магнитные энкодеры. Какие бывают виды энкодеров. Где применяются датчики угла поворота. Как выбрать энкодер для конкретной задачи.
Что такое энкодер и для чего он нужен
Энкодер (от англ. encoder — кодировщик) — это устройство, которое преобразует угловое или линейное перемещение в электрические сигналы. Основная задача энкодера — точное определение положения, скорости и направления движения вращающихся или перемещающихся частей механизмов и машин.
Энкодеры широко применяются в промышленной автоматизации, робототехнике, станкостроении и других отраслях, где требуется высокоточное позиционирование и контроль движения. Они позволяют создавать системы с обратной связью, обеспечивая точное управление двигателями и механизмами.
Принцип работы энкодера
Принцип работы энкодера основан на преобразовании механического перемещения в последовательность электрических импульсов. Ключевые компоненты энкодера:

- Подвижная часть (диск или линейка) с нанесенным кодовым рисунком
- Источник света (для оптических энкодеров)
- Фотоприемники или магнитные датчики
- Электронная схема обработки сигналов
При вращении диска или перемещении линейки датчики считывают кодовый рисунок и генерируют электрические импульсы. Анализируя эти импульсы, можно определить угол поворота, направление и скорость вращения вала энкодера.
Основные виды энкодеров
Энкодеры можно классифицировать по нескольким признакам:
По принципу действия:
- Оптические
- Магнитные
- Индуктивные
- Емкостные
По типу выходного сигнала:
- Инкрементальные (относительные)
- Абсолютные
По виду измеряемого перемещения:
- Поворотные (угловые)
- Линейные
Рассмотрим подробнее наиболее распространенные типы энкодеров.
Оптические энкодеры: принцип работы и особенности
Оптические энкодеры — самый распространенный тип датчиков угла поворота. Их работа основана на считывании светового потока, проходящего через кодовый диск с прорезями.
Основные компоненты оптического энкодера:

- Светодиод или другой источник света
- Кодовый диск с прорезями
- Фотоприемники
При вращении диска свет, проходящий через прорези, попадает на фотоприемники, которые генерируют электрические импульсы. Анализируя последовательность этих импульсов, можно определить угол поворота, направление и скорость вращения вала.
Преимущества оптических энкодеров:
- Высокая точность и разрешающая способность
- Широкий диапазон скоростей вращения
- Невосприимчивость к электромагнитным помехам
Недостатки:
- Чувствительность к загрязнениям и вибрациям
- Ограниченный срок службы светодиода
Магнитные энкодеры: особенности конструкции и применение
Магнитные энкодеры используют эффект Холла для определения положения вала. Их основные компоненты:
- Магнитный ротор с чередующимися полюсами
- Датчики Холла
- Электронная схема обработки сигналов
При вращении магнитного ротора датчики Холла генерируют синусоидальные сигналы, которые затем преобразуются в цифровые импульсы.
Преимущества магнитных энкодеров:
- Высокая надежность и долговечность
- Устойчивость к загрязнениям и вибрациям
- Компактные размеры
Недостатки:

- Меньшая точность по сравнению с оптическими энкодерами
- Чувствительность к внешним магнитным полям
Инкрементальные и абсолютные энкодеры: в чем разница
Инкрементальные (относительные) энкодеры выдают последовательность импульсов при вращении вала. Они позволяют определить относительное перемещение, но не абсолютное положение. Для определения начального положения требуется дополнительный датчик нулевой метки.
Абсолютные энкодеры генерируют уникальный код для каждого положения вала. Они позволяют определить точное положение сразу после включения, без необходимости поиска нулевой точки.
Сравнение инкрементальных и абсолютных энкодеров:
- Инкрементальные проще и дешевле, но требуют поиска нулевой точки при включении
- Абсолютные сложнее и дороже, но сразу выдают точное положение
- Инкрементальные лучше подходят для измерения скорости, абсолютные — для точного позиционирования
Области применения энкодеров
Энкодеры широко используются в различных отраслях промышленности и техники:
- Станки с ЧПУ и обрабатывающие центры
- Промышленные роботы и манипуляторы
- Лифты и подъемные механизмы
- Упаковочное и печатное оборудование
- Автомобильная электроника
- Измерительные приборы
В каждой области применения к энкодерам предъявляются специфические требования по точности, надежности, условиям эксплуатации и другим параметрам.

Как выбрать энкодер для конкретной задачи
При выборе энкодера следует учитывать следующие факторы:
- Тип измеряемого перемещения (угловое или линейное)
- Требуемая точность и разрешение
- Условия эксплуатации (температура, влажность, вибрации)
- Совместимость с системой управления
- Стоимость и доступность
Для задач, требующих высокой точности в чистых условиях, лучше подойдут оптические энкодеры. В тяжелых промышленных условиях предпочтительнее магнитные энкодеры.
Инкрементальные энкодеры хороши для измерения скорости и относительного перемещения, а абсолютные — для точного позиционирования.
Заключение
Энкодеры играют важную роль в современных системах автоматизации и управления движением. Правильный выбор типа и модели энкодера позволяет создавать высокоточные и надежные системы для различных применений — от промышленных роботов до медицинского оборудования.
Развитие технологий приводит к появлению новых типов энкодеров с улучшенными характеристиками, что расширяет возможности их применения в различных отраслях.
Энкодер что это такое
Qelectrotech — современная бесплатная замена SPlan и Visio
Отличный программый пакет для проектирования электрических схем, принципиальных схем устройств Qelectrotech — легковесный САПР, являющийся беспплатным Open Source проектом. В отличие от своих «тяжеловесных собратьев»,…
Новые операционные усилители Microchip MCP6V51
Корпорация Microchip разработала операционные усилители MCP6V51 с динамической коррекцией напряжения смещения, полосой усиления сигнала 2 МГц, функцией подавления пульсаций источника питания и синфазных шумов. Эти…
STM32CubeIDE — скачать БЕСПЛАТНО среду разработки для МК
STM32CubeIDE – это продвинутая платформа платформа для разработки программного обеспечения нижнего уровня, которая содержит в себе : дружественный конфигиратор периферии микроконтроллера, компилятор и отладчик для всех…
«КРЕН ка» на 10 Ампер
LT1581 — уникальный линейный стабилизатор на 10 Ампер Микросхема LT1581 явлется достаточно уникальной, и представляет собой регулируемый линейный стабилизатор с низким падением напряжения и огромным выходным током до 10…
Среда разработки электроники eSim
eSim — ранее известный как Oscad — это новый программый продукт для разработки электроники. Или согласно принятой за рубежом классификации EDA — программная среда для разработки электронного прибора. Этот программный…
Или согласно принятой за рубежом классификации EDA — программная среда для разработки электронного прибора. Этот программный…
Регулируемый LDO на 5 Ампер с низким падением напряжения.
Регулируемый LDO на 5 Ампер Линейный стабилизатор на 5 Ампер с низком падением напряжения. Однажды я искал регулируемый линейный стабилизатор (LDO) на большой ток и мои усилия были вознаграждены. Я таки его нашёл:…
Затухание Wi-Fi в различных материалах
Затухание сигнала Wi-Fi(WLAN) в различных материалах Достаточно интересным и востребованным является вопрос, а будет ли хорошо работать Wi-Fi за соседней кирпичной стеной? Сетевые инженеры из университета Южной…
Длина волны у светодиодов
Длина волны у светодиодов цвет светодиода длина волны, нм падение напряжения на кристалле, В инфракрасный от 760 до 1.9 красный 610 — 760 1.6 … 2.03 оранжевый 590 — 610 2.03 … 2.1 жёлтый 570 — 590 2.1 … 2.2…
Датчик Холла DRV5013Q1 со встроенным триггером Шмитта
Датчик Холла DRV5013Q1 со встроенным триггером Шмитта Датчик магнитного поля (датчик Холла) DRV5013Q1 со встроенным триггером Шмитта недавно разработан в Texas Instrument. Данный полупроводниковый прибор содержит в себе…
Данный полупроводниковый прибор содержит в себе…
GaN MOSFET от Texas со встроенным драйвером
Первый GaN MOSFET от Texas Texas Instruments разработал и запустил в производство одним из первых микросхему выполненную по очень перспективной GaN технологии, основанной на использовании полупроводникового кристалла с…
Энкодер что это такое
Определение направления вращения в осциллограмме Энкодер что это такое? Весьма часто в автомагнитоле, принтере, и других электронных устройствах можно видеть такие электронные компоненты, как энкодер. Так что же это…
Очень простой УНЧ с «кнопочной» регулировкой громкости
Очень простой УНЧ с «кнопочной» регулировкой громкости Если необходимо быстро сделать усилитель низкой частоты (УНЧ) с цифровой регулировкой уровня громкости кнопками, Вам поможет микросхема TDA8551, особенность — в…
Решение для питания светодиодов в системах освещения.
Решение для питания светодиодов в системах освещения. Компания On Semiconductor разработала новую микросхему для питания мощных светодиодов, применяемых в цепях освещения. Полупроводниковый прибор NCL30082 является…
Полупроводниковый прибор NCL30082 является…
HDC1080 — датчик влажности и температуры.
Микросхема HDC1080 является цифровым датчиком влажности и температуры, ключевым отличием которого является сочетание точности измерения с малой потребляемой мощностью. Данный полупроводниковый датчик работает в широком…
Близкое и прекрасное будущее интерфейсов SCSI и SAS
Будущее интерфейсов SCSI и SAS Если Вы хотите знать, какие новшества ждут рынок SCSI устройств в не очень отдаленном будущем, и вы ничего не слышали про SAS-3, SCSI Express (SCSI over PCIe) или Multilink SAS,…
Лечение ошибки «Не удалось вызвать функцию mail».
Лечение ошибки «Не удалось вызвать функцию mail». При добавлении на сайт, работающий под управлением CMS Joomla была замечена данная ошибка. Суть её сводилась к тому, что после заполнения формы отправки почты , не…
Цифровой регулятор громкости MAX5486
Цифровой регулятор MAX5486 Микросхема MAX5486 является цифровым регулятором громкости и баланса с кнопочным управлением и не требует внешнего микропроцессора.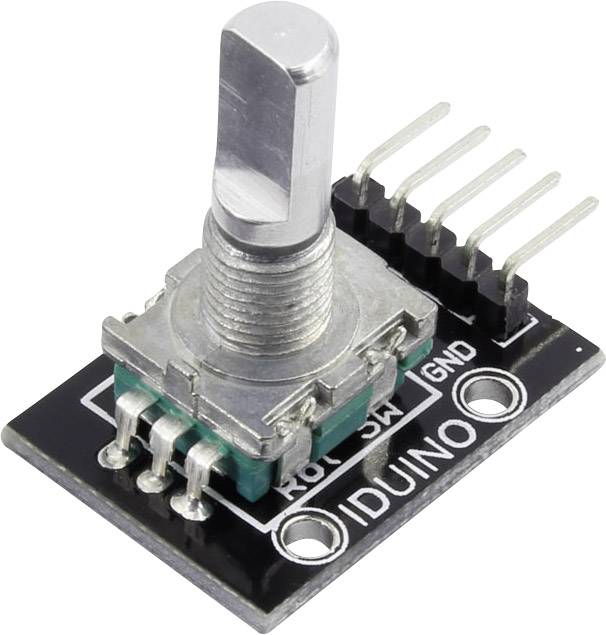 Ключевые особенности: Данная микросхема имеет входное…
Ключевые особенности: Данная микросхема имеет входное…
Что такое dBi ?
Что такое dBi ? Часто на ВЧ устройствах (спутниковых антеннах, точках доступа Wi-Fi) можно видеть такую велину как dBi. Но каков же сакральный смысл данного обозначения? В радиотехнике используется очень интересная…
Настройка WWAN модемов Qualcomm Gobi2000 под Linux
Настройка WWAN модемов Qualcomm Gobi2000 под Rosa Linux Рассмотрим настройку такого модема на примере Rosa Linux R11 x64 , как пожалуй наиболее интенсивно развивающегося на территории РФ Нам потребуется: установочные…
Однокристальный контроллер Bluetooth 5 от ON Semiconductor
Контроллер Bluetooth 5 от ON Semiconductor Концерн ON Semiconductor разработал новый однокристальный контроллер интерфейса Bluetooth 5. Новинка получила название RSL10, данный продукт является однокристальным…
Открыть список закачек Firefox c помощью Dolphin
Открыть список закачек Firefox c помощью Dolphin Замечен интересный баг: После очередного обновления mozilla firefox стал открывать каталоги другим файловым менеджером,например Nautilus, а вам хочется чтоб это был,…
Как работает двухпороговый компаратор
Как устроен двухпороговый компаратор на примере нового прибора AMC23C12 от Texas Instrument? Данная микросхема как электронный прибор для отслеживания значения напряжения в заданном диапазоне, при этом аналоговая и…
Подключение датчиков к операционному усилителю
Подключение датчиков Подключение датчиков к операционному усилителю
Полисвич – что это такое?
Полисвич – что это такое? Полисвич (или PolySwitch) — это будующее приборов, которые мы называем предохранителями. Полисвич – при самом грубом приближении, является «вечным самовосстанавливающимся прехранителем». Такой…
Полисвич – при самом грубом приближении, является «вечным самовосстанавливающимся прехранителем». Такой…
Что такое энкодер.
14.06.2017
Энкодеры или датчики угла поворота — это приборы, которые перестраивают угол поворота вращающегося объекта (вала) в электрические сигналы, позволяющие определить угол поворота этого объекта (вала).
Енкодер предназначен для обширного использования в многообразных областях промышленного производства, к примеру, в сервоприводах.
Виды энкодеров:
1.Инкрементальный энкодер (инкрементальный датчик линейного перемещения).
Инкрементальные энкодеры или иначе квадратурные — предназначены для формирования импульсов, с помощью которых приемное устройство может определить текущее положение координаты, исчисляя количество импульсов счетчиком.
Чтобы привязать систему отсчета к началу отсчета, квадратурные энкодеры линейных перемещений имеют референтные метки, с помощью которых следует пройти после запуска оборудования.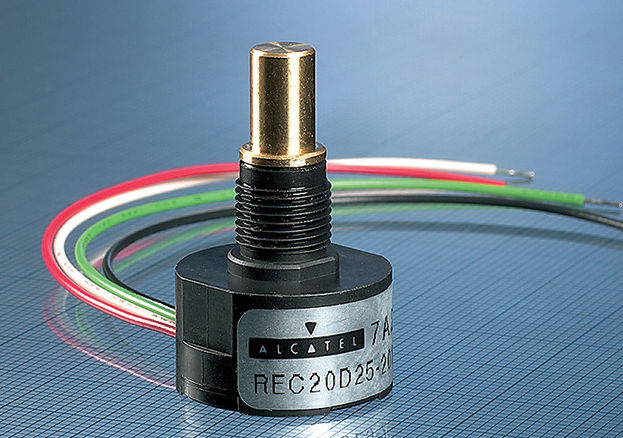
Инкрементальный энкодер принцип работы.
Во время вращения формируются импульсы, с помощью которых приемное устройство определяет настоящее положение координаты, с помощью метода подсчета счетчиком числа импульсов .
Чтобы привязать систему отсчета, инкрементальные энкодеры имеет одну на оборот референтный «маркер» (метку), через который следует пройти после запуска оборудования.
С целью установки направления и расстояния перемещения, можно использовать два канала (в документации обычно обозначаются как А — синус и В — косинус), в которых идентичные меандры (последовательности импульсов) сдвинуты на 90 градусов, друг к другу. Данный факт допускает определение направления перемещения линейных и направления вращения угловых датчиков.
В современных датчиках также используется команда «метка на оборот» (обозначение референтной метки — С, R или Z), в сочетании с недостаточно точным концевиком, определяет точное положение «0» координаты привода.
2. Абсолютный энкодер.
Помимо инкрементальных существуют абсолютные датчики линейных перемещений.
Энкодер абсолютный показывает координату, не требуя прохождения референтных меток, т. е. сразу при включении.
При помощи абсолютных датчиков вращения можно определить координату без перемещения осей станка.
Существует две разновидности абсолютных энкодеров:
• Однооборотные — текущая координата может быть определена в рамках одного полного оборота вала .
• Многооборотные, когда датчики дополнительно определяют несколько полных оборотов.
Передача данных измеренной координаты датчиками угла и абсолютными датчиками вращения осуществляется с помощью электронных интерфейсов SSI, EnDat, PROFIBUS-DP (возможны другие). Также существуют интерфейсы PROFIBUS-DP, EnDat, SSI двунаправленные, которые могут осуществлять диагностику и контроль датчиков.
На рынке производства датчиков углового перемещения (энкодеров) необходимо выделить такие компании, как: Sick, Eltra, IFM, Baumer, Pepperl+Fuchs, Siemens и многие другие.
Вот некоторые виды продукции перечисленных компаний:
• Датчики поворота ВЕ178 (компании SICK), наиболее распространенные и недорогие.
• Многооборотные энкодеры SICK.
• Программируемые угловые энкодеры IFM Electronic, надежная конструкция, с высокой частотой коммуникации.
• OSICODER — энкодеры для точного определения скорости и положения.
• Серия оптических щелевых датчиков OPU, компании IFM Electronic (по принципу действия светового оптического барьера).
• Оптические угловые датчики OPL — серии (IFM Electronic).
• Датчики линейных перемещений (многооборотные) BKS / PKS (компания Sick).
• Энкодеры Sick, с тросовым барабаном.
Последние новинки производства компании Sick:
• GR18S — сверхэкономичные фотодатчики в коротком корпусе цилиндрической формы.
• WT250 — на данный момент самые маленькие датчики, с подавлением заднего фона и универсальным напряжением.
Это далеко неполный список продукции, выпускаемой вышеперечисленными компаниями.
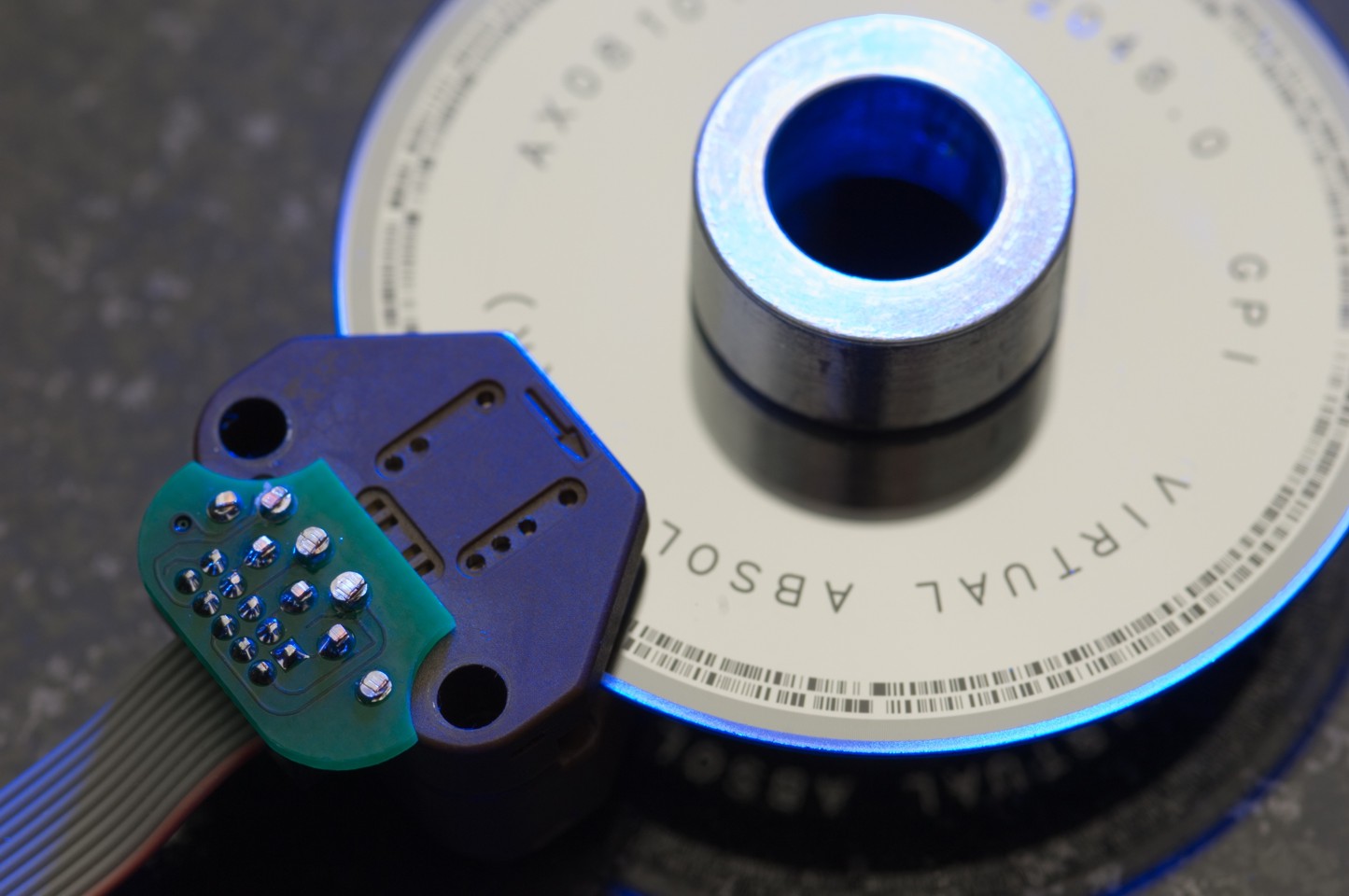
Что такое оптический энкодер.
Датчики угла поворота, где всякому положению вала отвечает индивидуальный нумерационный выходной код, который кроме числа оборотов выступает основной рабочей величиной датчика, называются оптическими.
Оптические датчики имеют стеклянный диск с оптическим растром, жестко установленный непосредственно на валу.
Абсолютные оптические энкодеры, как и квадратурные, считывают и фиксируют данные вращения оптического диска.
HLC2701, HLC2705, HOA0901, HOA0902 – оптические датчики (компания — производитель Honeywell), для совместного использования с кодирующей линейкой (диском) и ИК — излучателем.
Что такое магнитный энкодер.
Магнитные энкодеры – это датчики, основными принципами действия которых выступают регистрация таких параметров, как вращающийся магнитный элемент, прохождение магнитных полюсов и преобразование этих показателей в надлежащий цифровой код.
Магнитные датчики угла поворота подразделяются на:
• Магнитные линейные энкодеры.
• Магнитные кольцевые датчики.
• Поворотные магнитные энкодеры.
Выделяю также механические и оптические энкодеры, со ступенчатым ходом, с диэлектрическим или стеклянным диском с нанесенными непрозрачными или проводящими выпуклыми участками. При помощи линейки переключателей (механическая схема) или линейки оптронов (оптическая схема) происходит считывание абсолютного угла поворота диска.
Вы можете купить энкодер в Киеве, Харькове, Днепропетровске, Львове, Одессе и по всей Украине в интернет-магазине Eltaltd.
В нашей компании вы найдете полный спектр енкодеров ведущих мировых производителей. Мы предоставим лучшие цены на энкодер baumer, энкодер eltra, энкодер sick, энкодеры сименс и другие.
Подписывайтесь на наши обновления:
Что такое кодировщик? — Utmel
Кодер — это устройство, которое компилирует и преобразует сигнал (например, битовый поток) или данные в сигнальную форму, которую можно использовать для связи, передачи и хранения. Энкодер преобразует угловое или линейное смещение в электрические сигналы.
Энкодер преобразует угловое или линейное смещение в электрические сигналы.
Каталог
Ⅰ Классификация энкодеров
По принципу обнаружения энкодеры можно разделить на оптические, магнитные, индуктивные и емкостные. По методу масштабирования и форме выходного сигнала его можно разделить на три типа: инкрементный, абсолютный и гибридный.
энкодер 1
1. Инкрементный энкодер
Инкрементальный энкодер напрямую использует принцип фотоэлектрического преобразования для вывода трех наборов прямоугольных импульсов A, B и Z. Разность фаз двух наборов импульсы A и B составляют 90 градусов, так что можно легко определить направление вращения. Фаза Z представляет собой один импульс на оборот и используется для позиционирования опорной точки. Его преимуществами являются простая структура, средний механический срок службы более десятков тысяч часов, сильная помехоустойчивость, высокая надежность и пригодность для передачи на большие расстояния. Недостатком является то, что информация об абсолютном положении вращения вала не может быть выведена.
Недостатком является то, что информация об абсолютном положении вращения вала не может быть выведена.
2. Абсолютный энкодер
Абсолютный энкодер — это датчик, который напрямую выводит числа. На его круглом кодовом диске в радиальном направлении расположено несколько концентрических кодовых дисков. Каждая дорожка состоит из светопропускающих и непрозрачных секторов. Деревья секторов соседних кодовых каналов находятся в двойном отношении. Количество кодовых каналов на кодовом диске равно количеству двоичных разрядов. На одной стороне диска расположен источник света, а на другой стороне имеется светочувствительный элемент, соответствующий каждому кодовому каналу. Когда диск находится в разных положениях, каждый светочувствительный элемент преобразует сигнал соответствующего уровня в зависимости от того, получает он свет или нет, в двоичное число. Характеристика этого типа энкодера заключается в том, что ему не нужен счетчик, и он может считывать фиксированный цифровой код, соответствующий положению в любом положении вала. Очевидно, что доктрин должно быть N.
Очевидно, что доктрин должно быть N.
3. Гибридный абсолютный энкодер
Гибридный абсолютный энкодер выводит два набора информации, один набор информации используется для определения положения магнитного полюса с функцией абсолютной информации; другой набор точно такой же, как и выходная информация инкрементного энкодера.
Ⅱ Применение фотоэлектрического энкодера
энкодера 2
1. Измерение угла: В симуляторе вождения автомобиля фотоэлектрический энкодер выбран в качестве датчика для измерения угла поворота рулевого колеса. В гравиметрическом приборе используется фотоэлектрический датчик для соединения его вала с валом компенсационной ручки гравиметрического прибора. Измеритель угла кручения использует энкодер для измерения изменений угла кручения, таких как экспериментальная машина для кручения, испытание производительности рыболовной удочки на кручение и т. Д. Машина для испытаний на удар маятника использует энкодер для расчета удара по изменению угла поворота.
2. Измерение длины: Счетчик метров использует окружность ролика для измерения длины и расстояния до объекта.
Датчик смещения кабеля использует окружность наматывающего колеса для измерения длины объекта.
Измерение прямого соединения, соединение с главным валом силового устройства, приводящего в движение линейное перемещение, и измерение по количеству выходных импульсов.
При обнаружении среды информация о линейном перемещении передается на прямую рейку, звездочку вращающейся цепи и зубчатое ременное колесо.
3. Измерение скорости: Скорость линии: измерение скорости производственной линии путем подключения к счетчику.
Угловая скорость: измерение скорости двигателей, валов и т. д. с помощью энкодеров.
4. Измерение положения: Для станков его можно использовать для запоминания положения координат каждой точки координат станка, например, сверлильного станка и т. д.
С точки зрения автоматического управления, он может контролировать назначенное действие в пастырском положении, такое как лифты, подъемники и т.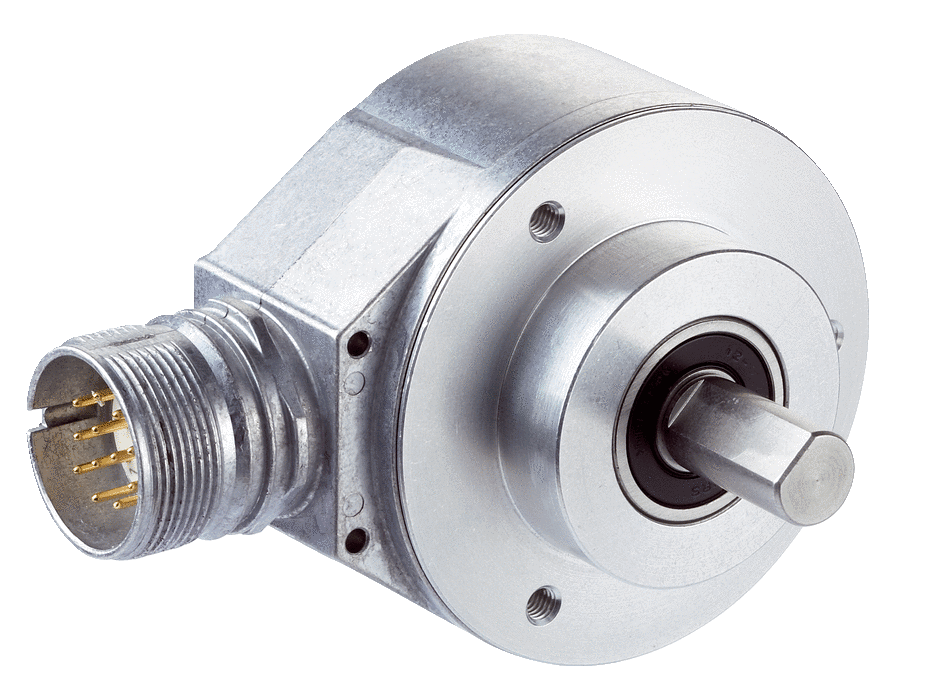 д.
д.
5. Synchronous control: Synchronously control the transmission links through angular velocity or linear velocity to achieve tension control
Ⅲ Incremental encoder (rotary type)
encoder 3
1. Working principle
Имеется фотоэлектрический кодовый диск с осью в центре инкрементального энкодера, на котором имеются круглые и темные выгравированные линии. Они считываются фотоэлектрическими устройствами передатчика и приемника, которые получают четыре группы синусоидальных сигналов, объединенных в A, B, C, D. Каждая синусоида Разность фаз 90 градусов (360 градусов относительно цикла) сигналы C и D меняются местами и накладываются на фазы A и B для усиления стабильного сигнала; кроме того, импульс Z-фазы выдается каждый оборот для представления нулевого эталонного бита.
Поскольку фазы A и B отличаются на 90 градусов, вращение энкодера вперед и назад можно определить, сравнив фазу A или фазу B. Нулевое опорное положение энкодера можно получить с помощью нулевых импульсов.
Нулевое опорное положение энкодера можно получить с помощью нулевых импульсов.
Материалы кодового диска энкодера: стекло, металл, пластик. Стеклянный кодовый диск наносится на стекло очень тонкими линиями надрезов, что обеспечивает хорошую термическую стабильность и высокую точность. Металлический кодовый диск выгравирован сквозными и непроходимыми линиями и не является хрупким. Однако из-за определенной толщины металла точность ограничена, а его термостойкость на порядок хуже, чем у стекла. Пластиковые кодовые диски экономичны, и их стоимость невысока, но хуже точность, термостойкость и ресурс.
Разрешение. Количество незамкнутых или темных выгравированных линий, выдаваемых энкодером за один оборот на 360 градусов, называется разрешением, также называемым индексацией разрешения, или напрямую называется количеством строк, обычно от 5 до 10 000 строк на оборот.
2. Выходной сигнал
Выходной сигнал имеет синусоидальную форму (ток или напряжение), прямоугольную волну (TTL, HTL), открытый коллектор (PNP, NPN), многократные двухтактные формы, среди которых TTL рядный дифференциальный привод (симметричный А, А-; В, В-; Z, Z-). HTL также называют двухтактным и двухтактным выходом. Интерфейс устройства приема сигнала энкодера должен соответствовать энкодеру.
HTL также называют двухтактным и двухтактным выходом. Интерфейс устройства приема сигнала энкодера должен соответствовать энкодеру.
Подключение сигнала. Импульсный сигнал энкодера обычно подключается к счетчику, ПЛК и компьютеру. Модули, подключенные между ПЛК и компьютером, делятся на низкоскоростные и высокоскоростные модули.
Однофазное подключение используется для счета в одном направлении и измерения скорости в одном направлении.
A.B Двухфазное соединение используется для прямого и обратного счета, определения прямого и обратного счета и измерения скорости.
Трехфазное подключение A, B, Z используется для измерения положения с коррекцией исходного положения.
A, A-, B, B-, Z, Z- соединения: из-за соединения с симметричными отрицательными сигналами электромагнитное поле, вносимое током в кабель, равно 0, затухание наименьшее, помехоустойчивое является лучшим, и его можно передавать на большее расстояние.
Для энкодеров TTL с симметричным отрицательным выходным сигналом дальность передачи сигнала может достигать 150 метров.
Для энкодеров HTL с симметричным отрицательным выходным сигналом дальность передачи сигнала может достигать 300 метров.
Ⅳ Абсолютный энкодер (поворотного типа)
На оптическом кодовом диске абсолютного энкодера имеется множество маркировок оптических каналов, и каждая линия маркировки расположена в 2 строки, 4 строки, 8 строк, 16 строк… На каждом положения энкодера, путем считывания каждой дорожки, открытия и затемнения выгравированных строк получается набор уникальных двоичных кодов (кодов Грея) от нулевой степени 2 до n-1 степени 2, который называется n- битовый абсолютный энкодер. Такой энкодер определяется механическим положением фотоэлектрического кодового диска, и на него не влияют сбои питания или помехи.
Каждое положение, определяемое механическим положением абсолютного энкодера, уникально. Его не нужно запоминать, не нужно искать точку отсчета и не нужно все время считать. Он может прочитать свою позицию, когда ему нужно знать позицию. Таким образом значительно улучшаются помехоустойчивые характеристики кодера и надежность данных.
От однооборотного датчика абсолютного отсчета до многооборотного датчика абсолютного отсчета
Поверните однооборотный абсолютный энкодер, чтобы измерить каждую выгравированную строку фотоэлектрического кодового диска во время вращения, чтобы получить уникальный код. Когда поворот превышает 360 градусов, код возвращается в исходное положение, что не соответствует принципу уникальности абсолютного кода. Кодировку можно использовать только для измерения в диапазоне вращения 360 градусов, что называется однооборотным абсолютным энкодером.
Если вы хотите измерить вращение за пределами 360 градусов, вам необходимо использовать многооборотный абсолютный энкодер.
Производитель энкодера использует принцип часового механизма. Когда центральное кодовое колесо вращается, другой набор кодовых дисков (или несколько наборов шестерен, несколько наборов кодовых дисков) приводится в движение шестернями, а количество оборотов добавляется к однооборотному кодированию, чтобы расширить диапазон измерения. энкодера, такой абсолютный энкодер называется многооборотным абсолютным энкодером. Также определяется механическая позиция кода, каждый код позиции уникален и не повторяется, без необходимости запоминания.
энкодера, такой абсолютный энкодер называется многооборотным абсолютным энкодером. Также определяется механическая позиция кода, каждый код позиции уникален и не повторяется, без необходимости запоминания.
Другим преимуществом многооборотного энкодера является то, что благодаря большому диапазону измерения фактическое использование становится богаче. Таким образом, нет необходимости искать точку изменения во время установки. Достаточно использовать промежуточное положение в качестве отправной точки, что значительно упрощает сложность установки и отладки.
Ⅴ Общие неисправности
1. Неисправность энкодера: относится к неисправности собственных компонентов энкодера, из-за которой он не может генерировать и выводить сигнал правильной формы. В этом случае необходимо заменить энкодер или отремонтировать его внутренние компоненты.
2. Отказ соединительного кабеля энкодера: Этот тип отказа имеет наибольшую вероятность возникновения и часто встречается во время технического обслуживания. Обычно кабель энкодера имеет обрыв, короткое замыкание или плохой контакт. В это время необходимо заменить кабель или разъем. Особое внимание следует также обратить на то, не закреплен ли кабель туго, что может привести к его ослаблению или отсоединению. В это время кабель необходимо зажать.
Обычно кабель энкодера имеет обрыв, короткое замыкание или плохой контакт. В это время необходимо заменить кабель или разъем. Особое внимание следует также обратить на то, не закреплен ли кабель туго, что может привести к его ослаблению или отсоединению. В это время кабель необходимо зажать.
3. Падение питания энкодера +5В: это относится к слишком низкому напряжению питания +5В. Причина слишком низкого уровня заключается в том, что сбой источника питания или сопротивление кабеля передачи энергии слишком велико и вызваны потери, тогда источник питания необходимо отремонтировать.
4. Падение напряжения батареи абсолютного энкодера: Этот тип отказа обычно имеет явный сигнал тревоги. В это время аккумулятор необходимо заменить. Если память о положении референтной точки утеряна, необходимо выполнить операцию возврата к референтной точке.
5. Экранированный провод кабеля энкодера не подсоединен или отвалился: Это приведет к помехам, что сделает форму волны нестабильной и повлияет на точность связи. Необходимо следить за тем, чтобы экранированный провод был надежно приварен и заземлен.
Необходимо следить за тем, чтобы экранированный провод был надежно приварен и заземлен.
#01 Роль кодировщика | Учебники | Датчики угла поворота | Продукция
1-3. Где используются энкодеры?
Как упоминалось в начале, энкодеры используются в устройствах, которые должны работать быстро и с высокой точностью. В частности, это устройство, которое приводится в действие двигателем. Например, энкодеры широко используются в промышленных роботах, используемых на заводах, таких как сборочные роботы, сварочные роботы, автоматические станки и обрабатывающие центры.
Однако большинство людей никогда не видели новейшую фабрику, на которой постоянно работают промышленные роботы. Давайте рассмотрим некоторые случаи, когда кодировщик действительно используется.
Автоматизация производства (умное производство)
Рисунок 2. Автоматизация производства (умное производство)
Различные производственные помещения используются на заводах по производству электроприборов и автомобилей.
Компьютер управляет станками, которые изготавливают детали из металла, и один станок может выполнять различные операции, такие как резка плоских поверхностей, сверление отверстий и нарезание канавок. Такие станки называются обрабатывающими центрами.
Изготовленные детали отправляются на сборочный завод и автоматически собираются промышленными роботами, такими как специальные сборочные машины или роботы манипуляторного типа.
Современные фабрики полностью автоматизированы и используют компьютеры и сети для всех производственных процессов проектирования, обработки деталей, хранения, управления, транспортировки и сборки. Эта концепция «подключенных фабрик» называется Индустрия 4.0, а такие фабрики называются умными фабриками.
Промышленные роботы
IПромышленные роботы освобождают людей от опасной и сложной работы (так называемой трехмерной работы), повышают производительность предприятия и стабилизируют качество продукции. Наиболее широко используемый и очень практичный промышленный робот — это шарнирный робот с несколькими суставами, эквивалентными человеческим плечам, локтям и запястьям.
Рисунок 3. Схема промышленного робота
Часть, соответствующая «руке» от плеча человека до запястья, называется манипулятором, а часть, соответствующая «руке» от запястья человека до пальца, называется концевым зажимом. В промышленных роботах, заменив концевой зажим, можно выполнять не только захват, но и покраску, и сварку. Если вы посетите выставку роботов или станков, вы действительно сможете увидеть шарнирно-сочлененных роботов, представленных различными компаниями.
Привод
Двигатели используются в качестве приводов роботов, поскольку их легко миниатюризировать и они обладают высокой точностью. В реальных случаях люди используют приводы с увеличенной силой вращения (крутящим моментом), интегрируя редуктор, который работает так же, как трансмиссия велосипеда, на выходной вал двигателя и замедляя скорость вращения двигателя.
Существует также электрический ползунок, который создает большую силу в направлении движения, изменяя движение с вращательного на прямолинейное с помощью винта.
Вы также можете увидеть их на выставках.
Рисунок 4а. Схема мотор-редуктора
Рисунок 4б. Схема электрического слайдера
Серводвигатель
Существует так много типов двигателей, что все запутанно. В этой статье мы сосредоточимся на двигателях, использующих энкодеры.
Одним из примеров является серводвигатель. Серводвигатель — это двигатель, который используется в сервомеханизме. Сервомеханизм — это механизм, который поддерживает постоянную скорость непрерывного вращательного движения или линейного движения или точно контролирует угол поворота и расстояние перемещения одного движения. Серводвигатель состоит из бесщеточного двигателя постоянного или переменного тока, энкодера и сервоусилителя (также называемого драйвером).
Рисунок 5. Схема серводвигателя
Чтобы поддерживать постоянную скорость вращения бесщеточного двигателя постоянного тока или двигателя переменного тока, энкодер определяет скорость вращения. Сервоусилитель управляет вращением двигателя быстрее, если обнаруженная скорость ниже установленной скорости вращения, или медленнее, если она выше.
Для точного контроля угла поворота двигателя энкодер определяет угол поворота. Сервоусилитель управляет углом поворота двигателя, проверяя, достиг ли он целевого угла поворота.
Этот метод управления с использованием энкодера для определения скорости вращения двигателя и угла поворота называется управлением с обратной связью (замкнутый контур).
Шаговый двигатель
Еще один шаговый двигатель. Шаговый двигатель — это двигатель, который поворачивается на определенный угол при подаче одного импульсного сигнала. Шаговый двигатель можно использовать без обратной связи (разомкнутый контур), поскольку угол поворота и скорость вращения определяются количеством импульсных сигналов, подаваемых на двигатель, и интервалом между импульсами.
