Что такое шаговый двигатель и как он работает. Какие бывают типы шаговых двигателей. Каковы основные характеристики шаговых двигателей. Где применяются шаговые двигатели. Как выбрать шаговый двигатель для проекта. Каковы преимущества и недостатки шаговых двигателей.
Что такое шаговый двигатель и принцип его работы
Шаговый двигатель — это электромеханическое устройство, преобразующее электрические импульсы в дискретные механические перемещения. Его ротор поворачивается на фиксированный угол (шаг) при подаче одного управляющего импульса.
Основные компоненты шагового двигателя:
- Статор с обмотками
- Ротор с постоянными магнитами или зубчатой структурой
- Корпус
- Подшипники
- Вал
Принцип работы шагового двигателя основан на электромагнитном взаимодействии между статором и ротором. При подаче тока на обмотки статора создается магнитное поле, которое взаимодействует с магнитным полем ротора, вызывая его поворот на определенный угол.

Основные типы шаговых двигателей
Существует несколько основных типов шаговых двигателей:
1. Двигатели с постоянными магнитами
В этом типе ротор выполнен в виде постоянного магнита. Они обеспечивают хороший крутящий момент, но имеют относительно большой шаг (обычно 7.5° или 15°).
2. Двигатели с переменным магнитным сопротивлением
Ротор выполнен из магнитомягкого материала с зубчатой структурой. Они имеют маленький шаг (1.8°-5°), но меньший крутящий момент.
3. Гибридные двигатели
Сочетают преимущества двух предыдущих типов. Ротор содержит постоянный магнит, но имеет зубчатую структуру. Обеспечивают высокую точность (шаг 0.9°-5°) и хороший крутящий момент.
4. Биполярные и униполярные двигатели
Различаются по способу подключения обмоток. Биполярные имеют две обмотки, униполярные — четыре или шесть. Биполярные обеспечивают больший момент, но требуют более сложной схемы управления.
Ключевые характеристики шаговых двигателей
При выборе шагового двигателя важно учитывать следующие характеристики:

- Угол шага — угол поворота ротора за один импульс управления
- Крутящий момент — сила, с которой двигатель может вращать нагрузку
- Скорость вращения — измеряется в оборотах в минуту или шагах в секунду
- Точность позиционирования — погрешность при повороте на заданный угол
- Потребляемый ток и напряжение питания
- Размеры и вес двигателя
Области применения шаговых двигателей
Шаговые двигатели широко используются в различных областях техники:
- 3D-принтеры и станки с ЧПУ
- Роботы и автоматизированные системы
- Точные измерительные приборы
- Медицинское оборудование
- Фото- и видеотехника (системы автофокуса, зум-объективы)
- Автомобильная промышленность (регулировка зеркал, фар)
- Аэрокосмическая отрасль
Преимущества и недостатки шаговых двигателей
Шаговые двигатели имеют ряд преимуществ:
- Высокая точность позиционирования
- Возможность работы без датчика обратной связи
- Высокий крутящий момент на низких скоростях
- Простота управления
- Долговечность из-за отсутствия щеток
Однако у них есть и некоторые недостатки:
- Возможность пропуска шагов при перегрузке
- Сложность работы на высоких скоростях
- Повышенное энергопотребление в режиме удержания позиции
- Вибрации и шум при работе
Управление шаговым двигателем
Для управления шаговым двигателем необходимо подавать импульсы тока на его обмотки в определенной последовательности. Существует несколько режимов управления:
Полношаговый режим
В этом режиме на каждом шаге активна одна или две фазы двигателя. Обеспечивает максимальный крутящий момент, но может вызывать вибрации.
Полушаговый режим
Чередует активацию одной и двух фаз, что позволяет уменьшить шаг в два раза. Снижает вибрации, но уменьшает крутящий момент.
Микрошаговый режим
Использует ШИМ для плавного изменения тока в обмотках. Позволяет получить очень маленький шаг (до 1/256 от полного шага) и значительно снизить вибрации.
Выбор шагового двигателя для проекта
При выборе шагового двигателя для конкретного применения следует учитывать несколько факторов:
- Требуемый крутящий момент и скорость вращения
- Необходимую точность позиционирования
- Размеры и вес двигателя
- Напряжение питания и потребляемый ток
- Условия эксплуатации (температура, влажность, вибрации)
- Стоимость двигателя и системы управления
Важно также учитывать совместимость двигателя с выбранным драйвером и контроллером.

Драйверы для шаговых двигателей
Драйвер — это устройство, которое преобразует сигналы управления от микроконтроллера в токи, необходимые для работы шагового двигателя. Основные функции драйвера:
- Формирование необходимых токов в обмотках двигателя
- Защита двигателя от перегрузок и коротких замыканий
- Реализация различных режимов управления (полный шаг, полушаг, микрошаг)
- Оптимизация энергопотребления двигателя
Популярные драйверы для шаговых двигателей включают серии A4988, DRV8825, TMC2208 и другие.
Программирование шаговых двигателей
Для управления шаговым двигателем с помощью микроконтроллера (например, Arduino) обычно используются специальные библиотеки. Они упрощают процесс программирования, предоставляя функции для:
- Настройки параметров двигателя
- Задания скорости и ускорения
- Поворота на заданное количество шагов или угол
- Непрерывного вращения
- Плавного разгона и торможения
Популярные библиотеки для Arduino включают AccelStepper и Stepper.
Тенденции развития шаговых двигателей
В области шаговых двигателей наблюдаются следующие тенденции:
- Увеличение точности и уменьшение шага
- Повышение энергоэффективности
- Интеграция драйверов и контроллеров в корпус двигателя
- Разработка гибридных систем, сочетающих преимущества шаговых и серводвигателей
- Применение новых материалов для улучшения характеристик
- Развитие технологий 3D-печати для производства компонентов двигателей
Эти инновации расширяют возможности применения шаговых двигателей и повышают их эффективность в различных областях.
Типы шаговых двигателей
Шаговый двигатель постоянного тока – это электромеханическое устройство, преобразующее сигнал управления в угловое (или линейное) перемещение
ротора с фиксацией его в заданном положении без устройств обратной связи. При проектировании конкретных систем
приходится делать выбор между сервомотором и шаговым двигателем. Когда требуется прецизионное позиционирование и точное
управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый двигатель
является наиболее экономичным решением. Как и для обычных двигателей, для повышения момента может быть использован
понижающий редуктор. Однако для шаговых двигателей редуктор не всегда подходит. В отличие от коллекторных двигателей, у
котрых момент растет с увеличением скорости, шаговый двигатель имеет больший момент на низких скоростях. К тому же,
шаговые двигатели имеют гораздо меньшую максимальную скорость по сравнению с коллекторными двигателями, что
ограничивает максимальное передаточное число и, соответственно, увеличение момента с помощью редуктора.
купить шаговый двигатель
купить блок управления шаговым двигателем
Виды шаговых двигателей:
- двигатели с переменным магнитным сопротивлением
- двигатели с постоянными магнитами
- гибридные двигатели
- биполярные и униполярные шаговые двигатели
Способы управления фазами шагового двигателя:
- полношаговый режим
- полушаговый режим
- микрошаговый режим
Зависимость момента от скорости, влияние нагрузки:
Момент, создаваемый шаговым двигателем, зависит от скорости, тока в обмотках и схемы драйвера.
Разгон шагового двигателя:
Для того, чтобы работать на большой скорости из области разгона, необходимо стартовать на низкой скорости из области старта, а затем выполнить …далее ➠
Резонанс шагового двигателя:
Шаговым двигателям свойственен нежелательный эффект, называемый резонансом. Эффект проявляется в виде внезапного падения момента на некоторых …далее ➠
Недостатки шагового двигателя:
- шаговым двигателям присуще явление резонанса
- возможна потеря контроля положения ввиду работы без обратной связи
- потребление энергии не уменьшается даже без нагрузки
- затруднена работа на высоких скоростях
- невысокая удельная мощность
- относительно сложная схема управления
Преимущества шагового двигателя:
- угол поворота ротора определяется числом импульсов, которые поданы на двигатель
- двигатель обеспечивает полный момент в режиме остановки (если обмотки запитаны)
- прецизионное позиционирование и повторяемость.
 Хорошие шаговые двигатели имеют точность от 3 до 5% от величины шага. Эта ошибка не накапливается от шага к шагу
Хорошие шаговые двигатели имеют точность от 3 до 5% от величины шага. Эта ошибка не накапливается от шага к шагу - возможность быстрого старта/остановки/реверсирования
- высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников
- однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи
- возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора
- может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов
Оригинал этой статьи можно прочитать в журнале «Основы схемотехники», №6-7/2001. Автор — Л.Ридико
Что такое шаговый двигатель и как им управлять
Шаговый двигатель – это устройство, преобразующее электрическую энергию в механическую. При этом вращение ротора осуществляется пошагово с фиксацией в конечной позиции.
При этом вращение ротора осуществляется пошагово с фиксацией в конечной позиции.
Каждый шаг представляет собой угол, величина которого зависит от устройства соответствующего двигателя. Кроме того, величиной угла можно управлять.
Шаговые двигатели используются в самых разных областях: в автомобилестроении, приборостроении, везде, где требуется механическое движение с высокой точностью позиционирования.
Популярно использование шагового двигателя и в точной робототехнике.
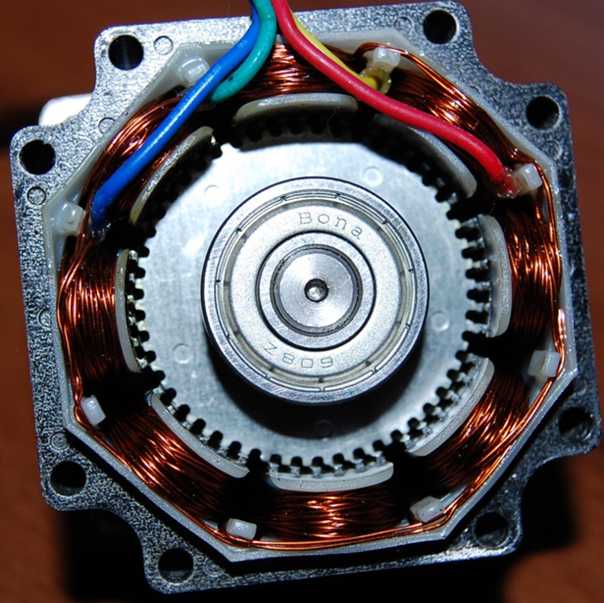
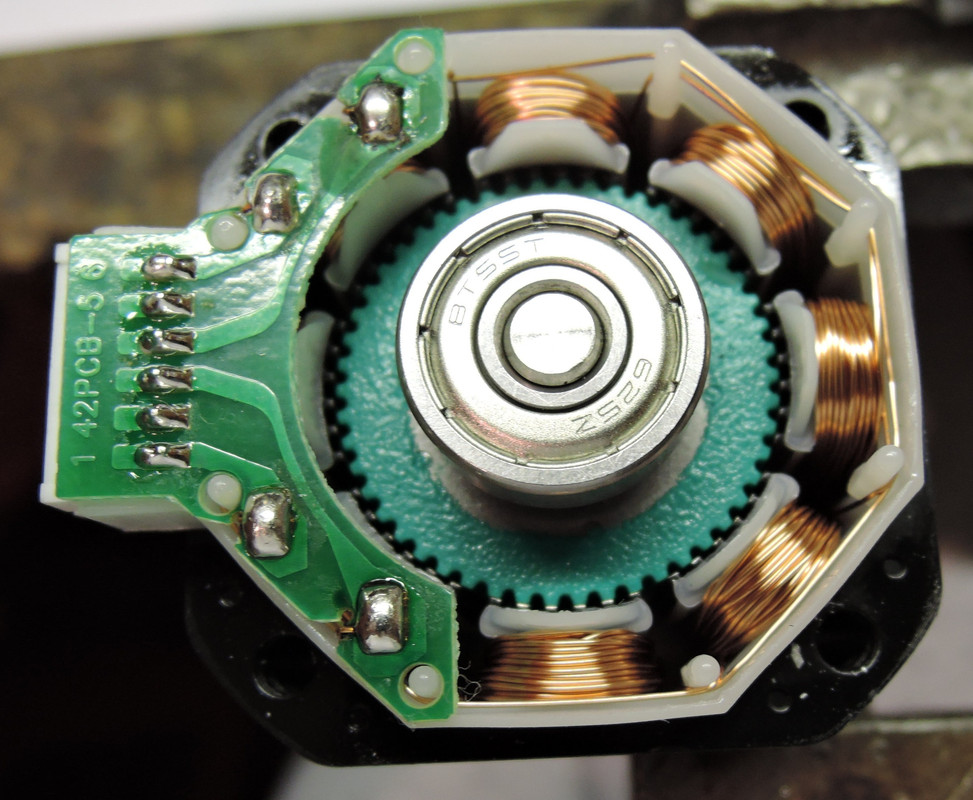
Устройство шагового двигателя
Как любой мотор, шаговый двигатель состоит из статора и ротора. Обмотки шагового двигателя выполнены на статоре. Они не зависят друг от друга. На роторе установлены постоянные магниты. Когда ток подается на одну из обмоток, ротор поворачивается на соответствующий угол, после чего останавливается. Подача тока на следующую обмотку опять вызывает поворот ротора, за которым следует остановка. Число импульсов, поданных на двигатель, определяют угол поворота ротора. От частоты импульсов зависит, будет ли вращение ротора скачкообразное или непрерывное.
Число импульсов, поданных на двигатель, определяют угол поворота ротора. От частоты импульсов зависит, будет ли вращение ротора скачкообразное или непрерывное.
Таким образом, устройство шагового двигателя позволяет контролировать угол поворота ротора и частоту его вращения.
В отличие от сервопривода никакого датчика позиционирования в устройстве шагового двигателя не предусмотрено.
Если есть желание разобрать двигатель, чтобы познакомиться с его устройством, то это плохая идея. Система ротор-статор представляет собой замкнутый магнитопровод, который при вмешательстве теряет ряд своих свойств, что может негативно сказаться на работе двигателя. Поэтому разбирать двигатель категорически не рекомендуется.
Принцип работы шагового двигателя
Перемещение шагового двигателя состоит из многочисленных шагов. Управление шаговым двигателем осуществляется с печатной платы, питание может подаваться от источника постоянного тока.
Отличие шагового двигателя от сервопривода
В отличие от сервопривода шаговый двигатель перемещается по шагам. Благодаря этому с его помощью можно совершать очень точные движения. Угол поворота выходного вала сервопривода обычно ограничен диапазоном от 0°C до 180°C. У шагового двигателя такого ограничения нет. Он может вращаться непрерывно. Однако управлять шаговым двигателем сложнее, чем сервоприводом.
Основные технические характеристики шагового двигателя
Крутящий момент — механическая характеристика шагового двигателя. Чем выше крутящий момент, тем лучше способность двигателя преодолевать возникающее при вращении сопротивление.
Удерживающий момент – это момент блокировки ротора, когда шаговый двигатель находится под напряжением, но вращения не происходит.
Стопорный момент (тормозящий момент) нужен, чтобы при совершении шага происходила фиксация ротора в конечной позиции.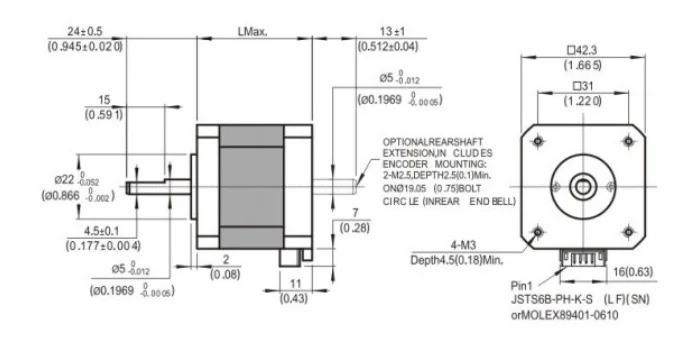 При отсутствии стопорного момента без поданного питания происходило бы проворачивание.
При отсутствии стопорного момента без поданного питания происходило бы проворачивание.
Номинальное напряжение – зависит от индуктивности двигателя. Чем выше индуктивность, тем выше требуется напряжение.
Номинальный ток – подается на обмотки шагового двигателя. Измеряется в Амперах.
Угол полного шага – способность двигателя совершать перемещение при одном шаге, указывается в градусах.
Момент инерции ротора – влияет на способность двигателя к разгону. Чем выше момент инерции, тем хуже разгон мотора.
Длина двигателя – длина корпуса без вала.
Типы шаговых двигателей
По строению различают следующие типы шаговых двигателей:
Шаговый двигатель с постоянным магнитом. Постоянный магнит такого двигателя выполнен в виде диска. Он расположен на роторе, и создает крутящий момент за счет притяжения и отталкивания обмотки на статоре.
Шаговый двигатель с переменным магнитным сопротивлением. Такой шаговый двигатель не имеет постоянного магнита. На его роторе расположено зубчатое колесо из специального металла. Крутящий момент невысокий, но зато отсутствует стопорящий момент.
Гибридный шаговый двигатель. Представляет собой сочетание двух вышеперечисленных видов двигателей. Для гибридных двигателей характерна очень маленькая величина шага, в результате чего они способны достигать максимальной точности. Однако стоимость таких двигателей достаточно высока.
По типу обмотки шаговый двигатель может быть униполярным и биполярным.
Преимущества шаговых двигателей
• Главное преимущество шагового двигателя – это точность величины шага.
• Шаговый двигатель может быть быстро запущен и также быстро остановлен. Для выполнения этих действий требуется минимальное время.
• Обладает высокой надежностью.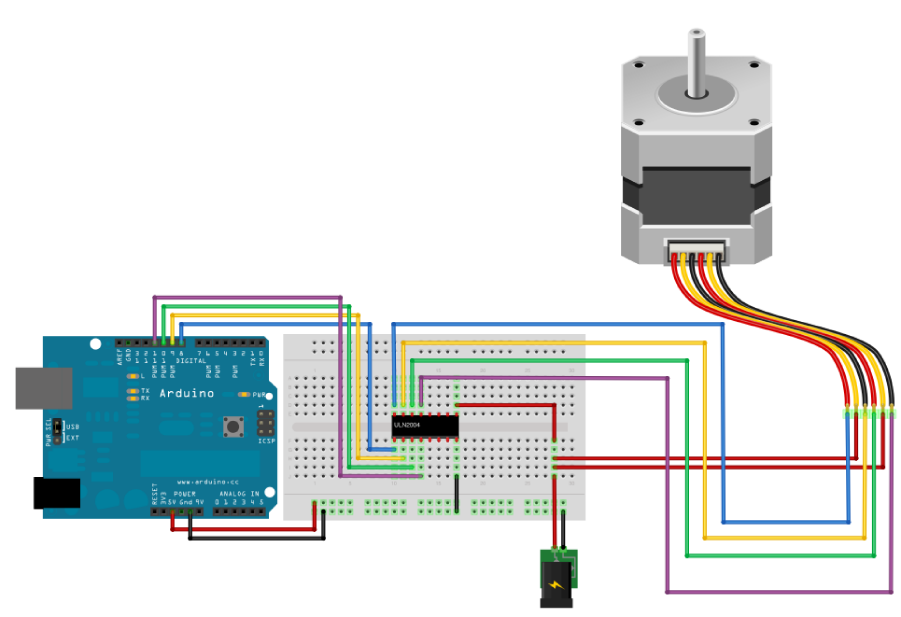 Стабильная работа при высоких нагрузках.
Стабильная работа при высоких нагрузках.
• Нет необходимости в датчиках или других элементах, обеспечивающих обратную связь. Позиционирование полностью определяется поступающими импульсами.
• Большой диапазон скоростей, в том числе возможность достижения низких скоростей.
• Доступная цена.
• Простота в установке и использовании.
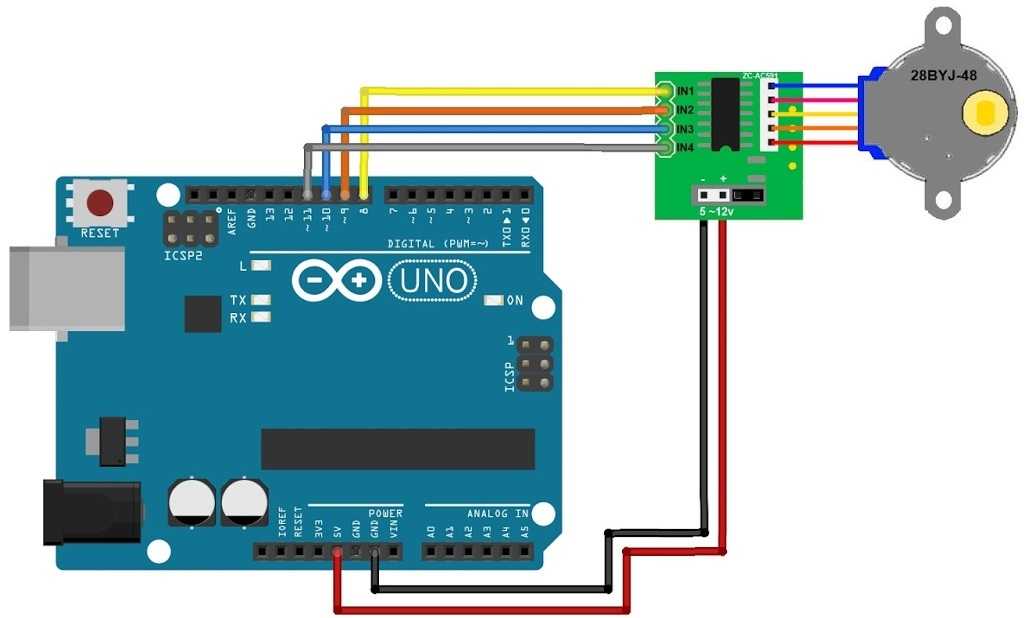
Подключение шагового двигателя к печатным платам Arduino
Доступная цена шаговых двигателей и их точная эффективная работа сделали такие двигатели востребованным компонентом в любительской робототехнике. Для реализации различных творческих проектов шаговые двигатели подключатся к программируемому контроллеру Arduino. Такое подключение выполнить достаточно просто.
Обычно шаговый двигатель имеет от 4 до 6 проводов для подключения. Если у шагового двигателя четыре провода, то это биполярный двигатель. У биполярного двигателя два провода подключаются к одной обмотки, два – к другой.
Шесть проводов имеет униполярный двигатель. При этом два провода подключаются к концам каждой обмотки, а один – к ее середине. Эти провода подключаются к заземлению.
В униполярном двигателе за счет способа его подключения скорость вращения выше, но меньше крутящий момент. Если требуется увеличить крутящий момент, то из униполярного двигателя всегда можно сделать биполярный. Для этого просто не нужно подключать дополнительные провода.
При этом для контроллера не имеет значение, какой способ подключения выбран. В обоих случаях управление производится через два выхода для каждой обмотки.
Способ подключения выбирается в зависимости от того, что является в приоритете: скорость вращения или крутящий момент.
Нет необходимости задействовать ШИМ-выходы, так как управление двигателем зависит только от подачи тока на обмотки.
ШИМ-выходы используются для полушаговых и микрошаговых режимов. С их помощью можно повысить скорость и улучшить точность работы двигателя, а к тому же значительно снизить уровень шума. Но при этом при полушаговом и микрошаговом режиме снижается момент и усложняется способ управления шаговым двигателем.
С их помощью можно повысить скорость и улучшить точность работы двигателя, а к тому же значительно снизить уровень шума. Но при этом при полушаговом и микрошаговом режиме снижается момент и усложняется способ управления шаговым двигателем.
Питание шагового двигателя
Рекомендуется использовать внешний источник питания 5-12 В, в противном случае ресурсов платы Arduino может оказаться недостаточно.
Следует всегда помнить, что во время подключения или отключения двигателя на программируемый контроллер не должно подаваться питание! Иначе контроллер может просто сгореть.
Библиотеки и управление шаговым двигателем
Использование библиотеки позволяет упростить управление шаговым двигателем. Среди предлагаемых библиотек можно выделить библиотеку Stepper и Accel Stepper. Библиотеку Stepper не нужно скачивать, она входит в Arduino IDE и подойдет для управления шаговым двигателем в простых проектах, предусматривающих использование лишь одного двигателя. Библиотека Stepper подключается командой #include.
Библиотека Stepper подключается командой #include.
Библиотека Accel Stepper обладает большими возможностями. Например, с ее помощью можно управлять сразу несколькими шаговыми двигателями, а также их работой на низких скоростях. Эта библиотека предусматривает возможность ускорения и замедления. А главное она позволяет добиться плавной работы мотора.
После подключения библиотеки создается объект stepper и указывается, к каким пинам подключаются обмотки. Для этого необходимо задать количество шагов для одного оборота вала.
Драйвер
Также для управления шаговым двигателем используется драйвер. Драйвер позволяет управлять мощными двигателями, ток на которые соответственно поступает с внешнего источника питания.
Импульсы, поступающие на двигатель, формирует микроконтроллер. Для усиления этих импульсов и используется драйвер.
Функции драйвера
Прежде всего, драйвер нужен, чтобы обеспечить поступление тока на обмотки статора. Также драйвер отвечает за коммутацию обмоток и выполняет защитные функции. Тип драйвера влияет на мощность на валу двигателя.
Также драйвер отвечает за коммутацию обмоток и выполняет защитные функции. Тип драйвера влияет на мощность на валу двигателя.
На сегодняшний день существует большой выбор драйверов для шаговых двигателей, например, L293, ULN2003, A3967SLB и многие другие.
Возможные сложности
Перегрев шагового двигателя. Рабочая температура двигателя может достигать 80°C, но это еще не означает, что двигатель перегревается. Если температура мотора превышает 80°C, то только тогда можно говорить о перегреве. В случае перегрева первым делом нужно проверить, какой рабочий ток выставлен на драйвере, соответствует ли он номинальному току двигателя. Можно снизить питающее напряжение, но это приведет к снижению крутящего момента, и соответственно скажется на работе двигателя. В крайнем случае, на корпус двигателя можно установить радиатор и/или вентилятор.
Пропуск шагов. Это достаточно распространенная неприятность, связанная с работой шаговых двигателей. Причины могут быть разные. Вот некоторые из них.
Причины могут быть разные. Вот некоторые из них.
• Некачественный драйвер. Если драйвер неоригинальный, то он не всегда может справиться с непростым управлением шаговым двигателем.
• Ошибки в настройке драйвера. Например, ошибочно выставленное напряжение.
• Перегрузка двигателя. В этом случае нужно проверить, действительно ли двигатель подходит для тех целей, в которых он используется. Вероятно, нужно снизить скорость двигателя или использовать более габаритную модель.
Выбор шагового двигателя
К основным параметрам, по которым производится выбор двигателя, относятся: производитель, габариты двигателя, тип двигателя, ток фазы и индуктивность. Как правило, лучше работают двигатели с меньшей индуктивностью.
Заключение
Шаговые двигатели – эффективное решение, если нужно достичь точного перемещения в пространстве. Они представляют собой бюджетную альтернативу сервоприводу. Благодаря уже созданным библиотекам ими легко управлять. Преимущества шаговых двигателей очевидны, поэтому они являются востребованным продуктом на рынке электронных устройств.
Благодаря уже созданным библиотекам ими легко управлять. Преимущества шаговых двигателей очевидны, поэтому они являются востребованным продуктом на рынке электронных устройств.
Что такое шаговый двигатель?
Что означает шаговый двигатель?
Шаговый двигатель — это двигатель постоянного тока, работающий дискретно. Это синхронный бесщеточный двигатель, в котором полный оборот делится на несколько шагов. Двумя основными компонентами шагового двигателя являются ротор и статор. Ротор представляет собой вращающийся вал, а статор состоит из электромагнитов, образующих неподвижную часть двигателя. Когда подается дискретное напряжение постоянного тока, шаговый двигатель вращается под определенным углом, называемым углом шага; таким образом, шаговый двигатель изготавливается с шагом на оборот 12, 24, 72, 144, 180 и 200 с соответствующим углом шага 30, 15, 5, 2,5, 2 и 1,8. Он может работать как с обратной связью, так и без нее.
Реклама
Шаговый двигатель
Шаговый двигатель — это особый тип двигателя постоянного тока, который не вращается непрерывно. Вместо этого полный оборот делится на несколько равных шагов. Шаговый двигатель состоит из фаз, представляющих собой несколько катушек, объединенных в группы. Подавая энергию входного напряжения на каждую фазу в последовательности, шаговый двигатель вращается, делая один шаг за раз. Таким образом, шаговый двигатель преобразует электрическую энергию или входной цифровой импульс в механическое вращение вала.
Шаговый двигатель работает по принципу электромагнетизма. В качестве ротора используется постоянный магнит или мягкое железо, окруженное электромагнитными статорами. Полюса ротора и статора могут быть зубчатыми. Когда на клеммы подается напряжение, ротор выравнивается со статором или перемещается, чтобы иметь минимальный зазор со статором из-за магнитного эффекта. На статоры подается питание последовательно, и ротор движется соответственно, давая полный оборот, который делится на дискретное количество шагов с определенным углом шага.
Существует четыре основных типа шаговых двигателей:
- Шаговый двигатель с постоянными магнитами
- Гибридный синхронный шаговый двигатель
- Шаговый двигатель с переменным сопротивлением
- Шаговый двигатель лаветового типа и контроль скорости. Поскольку он движется точно повторяемыми шагами, шаговый двигатель используется в таких устройствах, как 3D-принтеры, платформы для камер, плоттеры, сканеры и т. д. А поскольку он имеет максимальный крутящий момент на низких скоростях, шаговый двигатель также используется в устройствах, требующих низкого скорость.
Шаговый двигатель имеет низкий КПД, поскольку его потребление тока не зависит от нагрузки, и он потребляет больше энергии, чем другие двигатели постоянного тока. Его крутящий момент также уменьшается при использовании в высокоскоростных приложениях. Хотя шаговый двигатель может работать в системах управления без обратной связи, в нем отсутствует встроенная система обратной связи для позиционирования и управления.
Реклама
Синонимы
Шаговый двигатель
Поделись этим термином
Связанные термины
- Серводвигатель
- Электромагнетизм
- Регулятор напряжения
- Магнитное поле
Управление шаговым двигателем
Шаговый двигатель преобразует последовательность входных импульсов в точно определенное приращение положения механического вала, при этом каждый импульс перемещает вал на фиксированный угол. Затем можно дать команду двигателю перемещаться и удерживаться на одном из этих шагов без какого-либо датчика обратной связи (т. Е. Управление шаговым двигателем с разомкнутым контуром), если размер двигателя тщательно подобран для применения в отношении крутящего момента и скорости. Управление шаговым двигателем обеспечивает эту входную последовательность импульсов, чтобы заставить двигатель двигаться в нужное положение или с нужной скоростью.
Приводы постоянного напряжения с управлением шаговым двигателем используются для подачи постоянного положительного или отрицательного напряжения на каждую обмотку для управления движением.
 Однако именно ток обмотки, а не напряжение, прикладывает крутящий момент к валу шагового двигателя. Ток (I) в каждой обмотке связан с приложенным напряжением (V) через индуктивность обмотки (L) и сопротивление обмотки (R). Таким образом, они также известны как приводы L/R. Для получения высокого крутящего момента на высоких скоростях требуется большое напряжение привода с малым сопротивлением и малой индуктивностью. С приводом L/R можно управлять низковольтным резистивным двигателем с приводом более высокого напряжения, просто добавляя внешний резистор последовательно с каждой обмоткой. Однако, поскольку он тратит энергию в резисторах и выделяет тепло, он считается малоэффективным вариантом.
Однако именно ток обмотки, а не напряжение, прикладывает крутящий момент к валу шагового двигателя. Ток (I) в каждой обмотке связан с приложенным напряжением (V) через индуктивность обмотки (L) и сопротивление обмотки (R). Таким образом, они также известны как приводы L/R. Для получения высокого крутящего момента на высоких скоростях требуется большое напряжение привода с малым сопротивлением и малой индуктивностью. С приводом L/R можно управлять низковольтным резистивным двигателем с приводом более высокого напряжения, просто добавляя внешний резистор последовательно с каждой обмоткой. Однако, поскольку он тратит энергию в резисторах и выделяет тепло, он считается малоэффективным вариантом. Приводы постоянного тока генерируют постоянный ток в каждой обмотке вместо подачи постоянного напряжения. На каждом новом шаге к обмотке сначала прикладывается высокое напряжение, что вызывает быстрый рост тока в обмотке, поскольку dI/dt = V/L, где V велико. Ток в каждой обмотке контролируется контроллером шагового двигателя, обычно путем измерения напряжения на небольшом чувствительном резисторе, включенном последовательно с каждой обмоткой.