Что такое широтно-импульсная модуляция. Как работает ШИМ сигнал. Где применяется технология ШИМ. Какие преимущества дает использование ШИМ. Чем отличается аналоговая и цифровая ШИМ.
Что такое широтно-импульсная модуляция (ШИМ)
Широтно-импульсная модуляция (ШИМ) — это метод управления подачей мощности к нагрузке путем изменения длительности импульсов при постоянной частоте их следования. ШИМ позволяет эффективно преобразовывать цифровой сигнал в аналоговый, что широко используется в современной электронике.
Основные характеристики ШИМ сигнала:
- Частота следования импульсов (в Гц)
- Длительность (ширина) импульсов
- Скважность — отношение длительности импульса к периоду
- Коэффициент заполнения — отношение длительности импульса к периоду, выраженное в процентах
Принцип работы ШИМ
Как работает широтно-импульсная модуляция? Рассмотрим основные принципы:
- Формируется последовательность прямоугольных импульсов фиксированной частоты
- Изменяется ширина (длительность) этих импульсов
- Чем шире импульс, тем больше средняя мощность, подаваемая в нагрузку
- Нагрузка усредняет импульсный сигнал за счет собственной инерционности
Таким образом, меняя ширину импульсов, можно плавно регулировать подаваемую мощность от 0 до 100%.
Аналоговая и цифровая ШИМ
Различают два основных типа реализации ШИМ:
Аналоговая ШИМ
При аналоговой ШИМ используется компаратор, на входы которого подаются:
- Опорный пилообразный или треугольный сигнал
- Модулирующий аналоговый сигнал
На выходе компаратора формируются прямоугольные импульсы, ширина которых пропорциональна уровню входного аналогового сигнала.
Цифровая ШИМ
В цифровой ШИМ используется счетчик и компаратор. Счетчик формирует пилообразный сигнал, а компаратор сравнивает его с цифровым кодом, задающим ширину импульса. Цифровая ШИМ реализуется в микроконтроллерах и специализированных ШИМ-контроллерах.
Области применения ШИМ
Где используется широтно-импульсная модуляция? Основные сферы применения:
- Импульсные источники питания
- Управление двигателями постоянного тока
- Регулирование яркости светодиодов
- Инверторы для сварочных аппаратов
- Зарядные устройства
- Усилители класса D
- Системы автоматики и робототехники
ШИМ позволяет эффективно управлять мощностью в самых разных устройствах.

Преимущества использования ШИМ
Какие преимущества дает применение широтно-импульсной модуляции?
- Высокий КПД преобразования энергии (до 98-99%)
- Снижение тепловых потерь
- Уменьшение габаритов и веса устройств
- Простота реализации на микроконтроллерах
- Широкий диапазон регулирования мощности
- Улучшенные динамические характеристики
Благодаря этим достоинствам ШИМ стала основным методом управления мощностью в современной силовой электронике.
ШИМ-контроллеры: принцип работы
ШИМ-контроллер — это специализированная микросхема для формирования ШИМ-сигнала. Как работает такой контроллер?
- Формирует опорный пилообразный сигнал
- Сравнивает его с входным управляющим сигналом
- Генерирует на выходе ШИМ-импульсы
- Управляет силовыми ключами
- Обеспечивает защиту и стабилизацию
ШИМ-контроллеры широко применяются в импульсных источниках питания, инверторах, управлении двигателями.
Особенности применения ШИМ
При использовании широтно-импульсной модуляции важно учитывать следующие аспекты:
- Выбор оптимальной частоты ШИМ
- Фильтрация высокочастотных помех
- Применение быстродействующих силовых ключей
- Защита от сквозных токов
- Обеспечение электромагнитной совместимости
Грамотный учет этих факторов позволяет реализовать все преимущества ШИМ и избежать проблем.
Сравнение ШИМ и аналогового управления
В чем основные отличия широтно-импульсной модуляции от аналогового управления мощностью?
| Параметр | ШИМ | Аналоговое управление |
|---|---|---|
| КПД | До 98-99% | 60-70% |
| Тепловыделение | Низкое | Высокое |
| Габариты | Малые | Большие |
| Помехи | Высокочастотные | Низкочастотные |
ШИМ обеспечивает более высокую эффективность и компактность устройств по сравнению с аналоговыми методами.
Перспективы развития ШИМ
Каковы основные направления совершенствования технологии широтно-импульсной модуляции?
- Повышение рабочих частот до сотен кГц и единиц МГц
- Применение новых типов силовых полупроводников (SiC, GaN)
- Развитие цифровых методов формирования ШИМ
- Интеграция ШИМ-контроллеров в системы на кристалле
- Использование предиктивных алгоритмов управления
Развитие этих направлений позволит еще больше повысить эффективность и расширить сферы применения ШИМ.
Что такое ШИМ — принцип работы широтно-импульсной модуляции
Содержание
- 1 Что такое шим (широтно-импульсная модуляция)?
- 1.1 Область применения
- 2 ШИМ контроллер: принцип работы
- 2.1 Аналоговая ШИМ
- 2.2 Цифровая ШИМ
- 3 Принцип шим-регулятора
- 3.1 Пример использования шим регулятора
- 4 В чем отличие между шим и шир?
Микропроцессоры работают исключительно с цифровыми сигналами: с логическим нулем (0В) или с логической единицей (5В или 3.3В). По этой причине на выходе микропроцессор не может сформировать промежуточное напряжение. Применение для решения таких задач внешних ЦАП нецелесообразно из-за сложности. Специально для этого разработана широтно-импульсная модуляция — определенный процесс управления мощностью, идущей к нагрузке, методом изменения скважности импульсов постоянной частотности.
Что такое шим (широтно-импульсная модуляция)?
Это современный метод управления уровнем мощности подаваемой к нагрузке, заключающийся в изменении продолжительности импульса при постоянной частоте их следования. Это технология модуляции сигнала за счет вариативного изменения ширины импульсов, а не выходного напряжения. ШИМ преобразователь может быть аналоговый, цифровой и пр.
Это технология модуляции сигнала за счет вариативного изменения ширины импульсов, а не выходного напряжения. ШИМ преобразователь может быть аналоговый, цифровой и пр.
Широтно-импульсная модуляция — важнейшие параметры:
- Т -период тактирования — промежутки времени, через которые подаются импульсы.
- Длительность импульса — время пока подается сигнал.
- Скважность — рассчитанное по формуле соотношение длины импульса к импульсному Т периоду тактирования.
- D коэффициент заполнения — показатель обратный скважности.
Область применения
Применение ШИМ позволяет увеличить и намного коэффициент полезного действия электрических преобразователей. Тем более это относится к импульсным преобразователям, которые сегодня преимущественно применяются во вторичных источниках питания разных электронных аппаратов. Импульсные преобразователи обратноходовые, прямоходовые 1-тактные, 2-тактные, полумостовые, резонансные управляются с участием ШИМ.
Принцип ШИМ сегодня стал основным для электронных устройств, которым требуется поддержание на заданном уровне выходных параметров и их регулировка.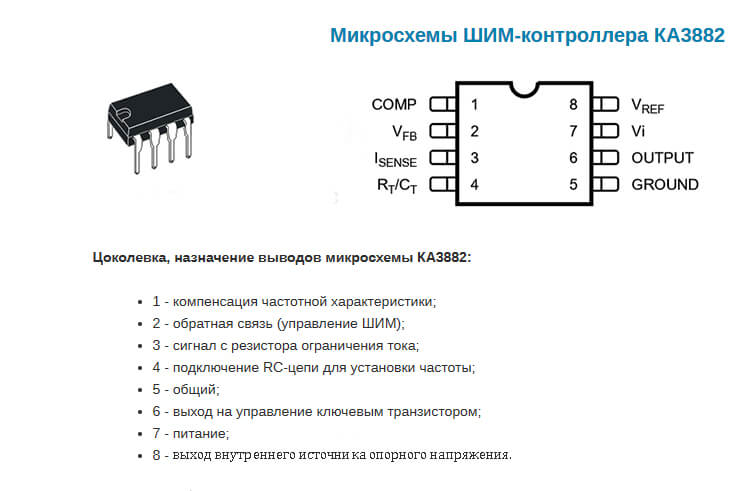 Метод применяется для изменения скорости вращения двигателей, яркости света, управления силовым транзистором БП импульсного типа.
Метод применяется для изменения скорости вращения двигателей, яркости света, управления силовым транзистором БП импульсного типа.
Используется ЩИМ модуляция и в системах управления яркостью светодиодов. Светодиод, благодаря низкой инерционности, успевает мигнуть на частоте всего в несколько десятков кГц. Для человеческого глаза работа светодиода в импульсном режиме воспринимается как свечение. Яркость светодиода зависит от продолжительности импульса в течение одного периода. При коэффициенте заполнения в 50%, то есть, если время свечения равно времени паузы, яркость светодиода составляет одну вторую номинальной величины. Когда появились светодиодные лампы 220В, нашлась проблема повышения их надёжности при нестабильном входном напряжении. Задача была решена разработкой драйвера питания, функционирующего по принципу ШИМ.
Распространение устройств, функционирующих по принципу ШИМ, позволило уйти от линейных трансформаторных БП. В результате чего повысилось КПД и уменьшились масса и габариты источников питания.
- обеспечивает плавный пуск преобразователя;
- ограничивает скважность и амплитуду управляющих импульсов;
- контролирует входное напряжение;
- защищает от КЗ силового ключа;
- в аварийной ситуации переводит устройство в деж. режим.
Сегодня широтно-импульсная модуляция применяется повсеместно и позволяет управлять яркостью подсветки ЖК дисплеев мобильных телефонов, смартфонов, ноутбуков. Реализована микросхема ШИМ в сварочных аппаратах, в автоинверторах, в зарядных устройствах и пр. В любом зарядном устройстве используется сегодня ШИМ.
ШИМ контроллер: принцип работы
ШИМ сигналом управляет ШИМ контроллер. Он управляет силовым ключом благодаря изменениям управляющих импульсов. В ключевом режиме транзистор может быть полностью открытым или полностью открытым. В закрытом состоянии через p-n-переход идет ток не больше нескольких мкА, то есть мощность рассеивания близка к нулю. В открытом состоянии идет большой ток, но так как сопротивление p-n-перехода мало, происходят небольшие теплопотери. Больше тепла выделяется в при переходе из одного состояния в другое. Однако благодаря быстроте переходного процесса в сравнении с частотой модуляции, мощность этих потерь незначительна.
В закрытом состоянии через p-n-переход идет ток не больше нескольких мкА, то есть мощность рассеивания близка к нулю. В открытом состоянии идет большой ток, но так как сопротивление p-n-перехода мало, происходят небольшие теплопотери. Больше тепла выделяется в при переходе из одного состояния в другое. Однако благодаря быстроте переходного процесса в сравнении с частотой модуляции, мощность этих потерь незначительна.
Все это позволило разработать высокоэффективный компактный широтно импульсный преобразователь, то есть с малыми теплопотерями. Резонансные преобразователи с переключением в 0 тока ZCS позволяют свести теплопотери к минимуму.
Аналоговая ШИМ
В аналоговых ШИМ-генераторах управляющий сигнал формируется при помощи аналогового компаратора, когда на его инвертирующий вход подается пилообразный или треугольный сигнал, а на неинвертирующий — непрерывный модулирующий.
Выходные импульсы идут прямоугольной формы. Частота их следования соответствует частоте пилы, а длительность плюсовой части импульса зависит от времени, когда уровень постоянного модулирующего сигнала, идущего на неинвертирующий вход компаратора, выше уровня пилообразного сигнала, подающегося на инвертирующий вход. В период когда напряжение пилообразного сигнала будет превышать модулирующий сигнал — на выходе будет фиксироваться отрицательная часть импульса.
В период когда напряжение пилообразного сигнала будет превышать модулирующий сигнал — на выходе будет фиксироваться отрицательная часть импульса.
Во время когда пилообразный сигнал подается на неинвертирующий вход, а модулирующий — на инвертирующий, выходные прямоугольные импульсы будут положительными, когда напряжение пилы будет выше уровня модулирующего сигнала на инвертирующем входе, а отрицательное — когда напряжение пилы станет ниже сигнала модулирующего.
Цифровая ШИМ
Работая с цифровой информацией, микроконтроллер может формировать на выходах или 100% высокий или 0% низкий уровень напряжения. Но для эффективного управления нагрузкой такое напряжение на выходе нужно изменять. Например, когда осуществляется регулировка скорости вращения вала мотора или при изменении яркости светодиода.
Вопрос решают ШИМ контроллеры. То есть, 2-хуровневая импульсно-кодированная модуляция — это серия импульсов, характеризующаяся частотой 1/T и либо шириной Т, либо шириной 0. Для их усреднения применяется передискретизация. При цифровой ШИМ прямоугольные подимпульсы, которыми и заполнен период, могут занимать любое место в периоде. Тогда на среднем значении сигнала за период сказывается лишь их количество. Так как процесс осуществляется на частоте в сотни кГц, можно добиться плавной регулировки. ШИМ контроллеры решают эту задачу.
Для их усреднения применяется передискретизация. При цифровой ШИМ прямоугольные подимпульсы, которыми и заполнен период, могут занимать любое место в периоде. Тогда на среднем значении сигнала за период сказывается лишь их количество. Так как процесс осуществляется на частоте в сотни кГц, можно добиться плавной регулировки. ШИМ контроллеры решают эту задачу.
Можно провести следующую аналогию с механикой. Когда маховик вращается при помощи двигателя, при включенном двигателе маховик будет раскручиваться или продолжать вращение, если двигатель выключен, маховик будет тормозить из-за сил трения. Однако, если движок включать/выключать на несколько секунд, вращение маховика будет держаться на определенной скорости благодаря инерции. Чем дольше период включения двигателя, тем быстрее раскрутится маховик. Аналогично работает и ШИМ модулятор. Так работают ШИМ контроллеры, в которых переключения происходят в секунду тысячи раз, и частоты могут достигнуть единиц мегагерц.
Использование ШИМ-контроллеров обусловлено их следующими преимуществами:
- стабильностью работы;
- высокой эффективностью преобразования сигнала;
- экономией энергии;
- низкой стоимостью.

Получить на выводах микроконтроллера (МК) ШИМ сигнал можно:
- аппаратным способом;
- программным способом.
В каждом МК есть встроенный таймер, генерирующий ШИМ импульсы на определённых выводах. Это аппаратный способ. Получение ШИМ сигнала при помощи команд программирования более эффективно за счет разрешающей способности и дает возможность задействовать больше выводов. Но программный способ вызывает высокую загрузку МК, занимая много памяти.
Принцип шим-регулятора
Работа ШИМ регулятора сложностью не отличается. ШИМ-регулятор — устройство, выполняющее такую же функцию, что и традиционный линейный регулятор мощности (то есть, меняет напряжение или ток за счёт силового транзистора, рассеивающего значительную мощность на себе). Но ШИМ-регулятор отличается намного большим КПД. Достигается это благодаря тому, что управляющий силовой транзистор функционирует в ключевом режиме (либо включен, тогда пропускает большой ток, но мало падение напряжения, либо выключен — ток не проходит). В результате на таких силовых транзисторах мощность практически не рассеивается и энергия впустую не тратится.
В результате на таких силовых транзисторах мощность практически не рассеивается и энергия впустую не тратится.
После силового транзистора напряжение выходит как прямоугольные импульсы с изменяющейся скважностью в зависимости от необходимой мощности. Но сигнал нужно демодулировать (то есть, выделить среднее напряжение). Этот процесс происходит или в самой нагрузке (когда она индуктивного характера) или если между нагрузкой и силовым каскадом располагают фильтр нижних частот.
Пример использования шим регулятора
Самый простой пример использования регулятора напряжения ШИМ — ШИМ микросхема NE555, с которой знаком каждый радио-любитель. Благодаря ее универсальности можно конструировать самые разнообразные детали: от простейшего одновибратора импульсов с 2 в обвязке до модулятора, состоящего из большого числа компонентов. ШИМ регулятор напряжения имеет широкую область применения — это схемы регулировки яркости светодиодов и лент, а также регулировка скорости вращения движков.
В чем отличие между шим и шир?
На Западе понятия широтно-импульсного регулирования ШИР и ШИМ практически не различаются. Однако у нас между ними все же существует различие. Во многих микросхемах реализован принцип ШИР, однако при этом они все равно называются ШИМ контроллеры. Таким образом различий в названии этих двух способов практически нет.
Единственное отличие между ШИР и ШИМ — при ШИР время импульса и паузы постоянны. А при ШИМ их длительности изменяются, что позволяет сформировать выходной ШИМ сигнал заданной формы.
Широтно-импульсная модуляция (ШИМ). Аналоговая и цифровая
Под широтно-импульсной модуляцией или ШИМ понимается современный способ управления передачей полезной мощности в нагрузку. Он заключается в изменении длительности выходных импульсов при постоянной частоте следования отдельных посылок. Широтно-импульсная модуляция имеет несколько разновидностей, отличающихся представлением управляющего сигнала (аналоговый или цифровой) и кратностью обработки. Согласно последнему признаку она может быть двоичной или троичной.
Согласно последнему признаку она может быть двоичной или троичной.
Чтобы понять, что такое широтно-импульсная модуляция – сначала потребуется ознакомиться со схемой и комплектом приборов, реализующих этот вид обработки электрического сигнала.
В состав типового устройства входят следующие узлы и элементы:
- Компаратор на основе контроллера.
- MOSFET драйверы.
- Выходные ключевые элементы.
Основное назначение приведенной схемы – выработать сигнал ШИМ, который формируется в аналоговом или цифровом виде. Получить нужное пониженное напряжение на выходе ШИМ устройства удается за счет сглаживания и усреднения импульсного сигнала за весь период его действия.
Аналоговый вариантПри этом способе обработки несущая, представленная «треугольником» или «пилой», поступает на инвертирующий входной узел компаратора. Основной обрабатываемый сигнал подается на его «прямой» вход. Если значение несущей в данный момент превышает по амплитуде полезный сигнал, то на выходе компаратора формируется нулевой уровень. В ситуации, когда его величина меньше сравниваемого – на том же выходе появляется отрицательная «единица» (низкий уровень).
В ситуации, когда его величина меньше сравниваемого – на том же выходе появляется отрицательная «единица» (низкий уровень).
В итоге посредством компаратора формируется дискретный сигнал, имеющий определенную частоту. Последняя соответствует периодичности входной «пилы» или «треугольника». А длина импульсной посылки на выходе устройства пропорциональна уровню основного или рабочего напряжения. То есть широтно-импульсная модуляция позволяет получить соответствующее представление аналогового сигнала, существенно облегчающее его обработку и упрощающее электронную схему.
Если же пилообразный «опорный» сигнал поступает на плюсовой или «прямой» вход компаратора, а основной – на инвертирующий, то прямоугольные импульсы на выходе будут положительными. По такому принципу работает микросхема TL494, широко применяемая при изготовлении блоков питания.
Цифровой вариантЦифровой вариант обработки методом ШИМ востребован в электронных схемах, где используется двоичный способ кодирования полезного сигнала. Выходные импульсы в этом случае могут принимать только два возможных значения: «ноль» или «единицу», соответствующие состояниям элементов схемы «выключено» или «включено».
Выходные импульсы в этом случае могут принимать только два возможных значения: «ноль» или «единицу», соответствующие состояниям элементов схемы «выключено» или «включено».
Полученный код подается затем на вход много-битного счетчика, с выходных контактов которого «снимается» тот же пилообразный сигнал, что и в случае с аналоговым преобразованием. После этого последовательность импульсов на выходе драйверов с ключами усредняется и превращается в нужное для работы пониженное напряжение.
Преимущества и недостатки ШИМШиротно-импульсная модуляция обрабатываемого сигнала позволяет достичь следующих преимуществ:
- Повышение КПД импульсных преобразователей напряжения (БП).
- Высокая экономичность преобразования за счет снижения тепловых потерь, без которых не обходится ни один линейный трансформатор.
- Снижение габаритов и веса импульсных блоков питания.
- Повышение надежности устройства и продление сроков его эксплуатации.

К отрицательным сторонам этого способа трансформации мощности относят создаваемые устройством импульсные помехи и сложные схемные решения, приводящие к затруднениям при ремонте.
Характеристики ШИМ сигналаК числу важнейших характеристикам этого метода обработки полезного сигнала относят:
- Амплитуду.
- Частоту следования посылок в Гц, определяющую точность управления.
- Скважность импульсных сигналов (или коэффициент заполнения).
Амплитуда, измеряемая в вольтах, определяется необходимостью получения требуемой величины питающего напряжения. А частота модулированного по ширине импульса выбирается с учетом того, что чем она выше – тем точнее будет регулирование. Этот показатель не может быть меньше времени реакции нагрузки, работающей от сформированного ШИМ сигнала. В противном случае возникают недопустимые пульсации регулируемого напряжения.
Тепловые потериС повышением частоты обрабатываемого сигнала растут и коммутационные потери, возникающие из-за ограниченности скорости переключения выходных ключей. Это объясняется тем, что при открытом и закрытом состоянии полевых структур рассеяние мощности на них незначительно. Ситуация меняется при их переходе из одного состояния в другое. В частично приоткрытых ключах протекают значительные по величине рабочие токи, а значение напряжения при этом также велико. Все это приводит к резкому возрастанию мощности, рассеиваемой на корпусных изделиях.
Это объясняется тем, что при открытом и закрытом состоянии полевых структур рассеяние мощности на них незначительно. Ситуация меняется при их переходе из одного состояния в другое. В частично приоткрытых ключах протекают значительные по величине рабочие токи, а значение напряжения при этом также велико. Все это приводит к резкому возрастанию мощности, рассеиваемой на корпусных изделиях.
Важно учитывать и то, что за сравнительно короткий период перехода ключи не разогреваются слишком сильно. Но с ростом частоты увеличивается и количество временных промежутков, вследствие чего тепловые потери значительно возрастают. Вот почему при построении ключевых схем применяются только быстродействующие элементы.
Если широтно-импульсная модуляция используется, например, для управления синхронным электродвигателем – частота дискретизации выбирается с тем учетом, чтобы она не воспринималась человеческим ухом (20 кГц и выше). Требования к параметрам ШИМ часто противоречат одно другому, что вынуждает разработчиков принимать компромиссные решения.
Показатель скважности характеризует диапазон модуляции обрабатываемого сигнала. При постоянстве частотной характеристики длительность периода также сохраняет свою величину (T=1/f). Поскольку в него входят и промежутки между отдельными импульсами (паузы) – полная временная характеристика учитывает и это параметр.
Согласно определению скважность – это отношение длительности одиночного импульса к продолжительности всего периода (S=tимп/T). Для удобства вычислений на практике применятся характеристика, обратная скважности. Она называется коэффициентом заполнения и определяется как D=1/S=T/tимп (чаще всего она выражается в процентном соотношении).
Области применения ШИМШиротно-импульсная модуляция широко применяется в следующих электронных устройствах:
- Импульсные преобразователи, входящие в состав большинства современных блоков питания.
- Электронные модули, позволяющие изменять яркость подсветки в ЖК дисплеях.

- Инверторы сварочных агрегатов, нуждающиеся в высоком КПД преобразования полезной мощности.
- Без ШИМ не обходится сегодня ни одна из импульсных схем преобразования напряжения (полумостовые, мостовые, резонансные, а также однотактные и двухтактные варианты).
- Функционирование любого зарядного устройства основано на использовании этого способа передачи мощности в нагрузку.
При питании современной аппаратуры широтно-импульсная модуляция не имеет альтернатив. Без ее применения любая преобразовательная схема лишена каких-либо перспектив. При выборе подходящего устройства потребуется учесть следующие моменты:
- Амплитуда сигнала при обработке методом ШИМ не меняется (она постоянна в течение всего процесса).
- Изменять контролируемые параметры (напряжение и ток) удается лишь за счет модуляции несущей по ширине импульса.
- На нагрузке, подключаемой к этой схеме, происходит усреднение представленного в импульсной форме сигнала.

Именно поэтому широтно-импульсная модуляция оптимально подходит для таких потребителей, в которых имеется возможность усреднения импульсного сигнала. Указанная процедура реализуется различными способами, каждый из которых имеет свои особенности.
Во-первых – это использование свойства инерционности нагрузки. Такое решение чаще всего применяется для электрообогревателей и лампочек накаливания, особенности функционирования которых не позволяют им остывать в промежутках между импульсами.
Еще один способ сглаживания сигнала – его усреднение в нагрузке за счет инерции восприятия человеческим глазом. Любой полупроводниковый излучающий элемент, в частности, гаснет и зажигается с частотой поступающих на него импульсов. Однако человеческий глаз неспособен реагировать на эти переключения (он воспринимает их как неизменное свечение с немного «плавающей» интенсивностью). На этом эффекте основывается управление яркостью элементов LED-мониторов.
Механическое усреднение в нагрузочной цепи применяется при управлении коллекторными двигателями, работающими на постоянном токе.![]() При грамотно подобранной частоте регулирования электродвигатель не будет тормозиться в паузах между импульсами, когда ток в обмотках отсутствует. Широтно-импульсная модуляция позволяет усреднять токи в сварочных агрегатах, а также в зарядных устройствах для типовых АКБ.
При грамотно подобранной частоте регулирования электродвигатель не будет тормозиться в паузах между импульсами, когда ток в обмотках отсутствует. Широтно-импульсная модуляция позволяет усреднять токи в сварочных агрегатах, а также в зарядных устройствах для типовых АКБ.
В ситуации, когда усреднение естественным путем невозможно – эту функцию выполняют специальные фильтрующие цепочки, собранные на основе резисторов и конденсаторов. При их использовании важно учитывать, что выделить постоянную составляющую совсем без потерь в данном случае не удается.
Похожие темы:
- Дискретность. Принципы и применение. Сигнал и работа. Особенности
- Аналоговый и цифровой сигнал. Типы сигналов и как это действует
- Электромагнитные волны. Опыты Герца. Излучения
- Модуляторы. Виды и работа. Применение и особенности
Что это такое и как это работает?
Цифровые сигналы имеют два положения: включено или выключено, что в сокращении интерпретируется как 1 или 0.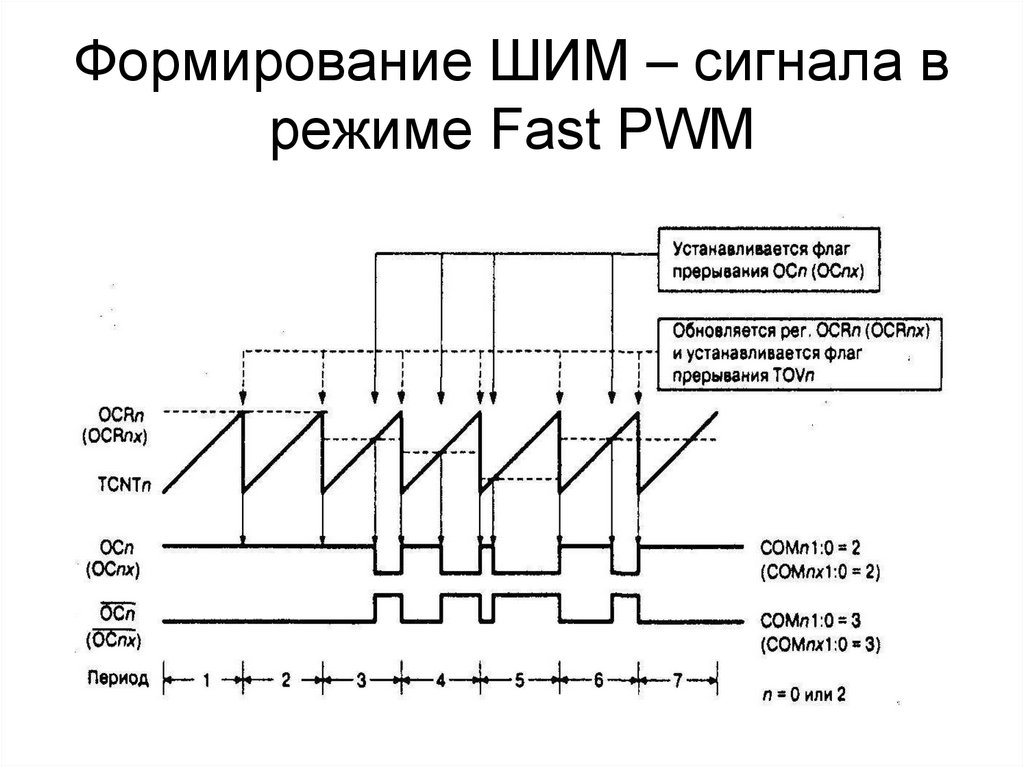 Аналоговые сигналы, с другой стороны, могут быть включены, выключены, на полпути, на две трети пути к включению и бесконечное число позиций от 0 до 1, либо приближающихся к 1, либо убывающих до нуля. В электронике они обрабатываются по-разному, но очень часто должны работать вместе (вот когда мы называем это «электроникой смешанного сигнала»). Иногда нам приходится передавать аналоговый (реальный) входной сигнал (например, температуру) в микроконтроллер ( который понимает только цифровой). Часто инженеры преобразуют этот аналоговый вход в цифровой для микроконтроллера (MCU) с помощью аналого-цифрового преобразователя. Но как насчет выходов?
Аналоговые сигналы, с другой стороны, могут быть включены, выключены, на полпути, на две трети пути к включению и бесконечное число позиций от 0 до 1, либо приближающихся к 1, либо убывающих до нуля. В электронике они обрабатываются по-разному, но очень часто должны работать вместе (вот когда мы называем это «электроникой смешанного сигнала»). Иногда нам приходится передавать аналоговый (реальный) входной сигнал (например, температуру) в микроконтроллер ( который понимает только цифровой). Часто инженеры преобразуют этот аналоговый вход в цифровой для микроконтроллера (MCU) с помощью аналого-цифрового преобразователя. Но как насчет выходов?
ШИМ — это способ управления аналоговыми устройствами с цифровым выходом. Другими словами, вы можете выводить модулирующий сигнал с цифрового устройства, такого как микроконтроллер, для управления аналоговым устройством. Это одно из основных средств, с помощью которых микроконтроллеры управляют аналоговыми устройствами, такими как двигатели с регулируемой скоростью, диммируемые лампы, приводы и динамики. Однако ШИМ не является настоящим аналоговым выходом. ШИМ «имитирует» аналогичный результат, подавая питание импульсами или короткими импульсами регулируемого напряжения.
Однако ШИМ не является настоящим аналоговым выходом. ШИМ «имитирует» аналогичный результат, подавая питание импульсами или короткими импульсами регулируемого напряжения.
Примером может быть подача полного напряжения на двигатель или лампу на доли секунды или подача импульсов напряжения на двигатель с интервалами, заставляющими двигатель или лампу делать то, что вам нужно. На самом деле напряжение подается, а затем снимается много раз с интервалом, но то, что вы испытываете, является аналоговой реакцией. Если вы когда-либо запускали коробочный вентилятор, периодически подавая питание, вы почувствуете ШИМ-отклик. Вентилятор и его двигатель не останавливаются мгновенно из-за инерции, поэтому к тому времени, когда вы снова подаете питание, они лишь немного замедляются.
Таким образом, вы не столкнетесь с резким прекращением подачи питания, если двигатель управляется ШИМ. Продолжительность времени, в течение которого пульс находится в заданном состоянии (высокий/низкий), является «шириной» пульсовой волны.
Рис. 2. Синие линии — это ШИМ-выход MCU, а красная линия — среднее напряжение. В этом случае ширина импульса (и соответствующий рабочий цикл) изменяется так, что среднее напряжение больше похоже на аналоговый выход, который не находится в устойчивом состоянии, как показано на рисунке 1. (Источник: Zureks — собственная работа, CC BY- СА 3.0, ) Устройство, управляемое ШИМ, ведет себя как среднее значение импульсов. Средний уровень напряжения может быть постоянным напряжением или движущейся целью (динамической/изменяющейся во времени). Для упрощения примера предположим, что ваш вентилятор с ШИМ-управлением имеет высокое напряжение 24 вольта. Если импульс находится на высоком уровне 50% времени, мы называем это 50% рабочим циклом. Термин «рабочий цикл» используется в других областях электроники, но в каждом случае рабочий цикл — это сравнение «включено» и «выключено».
Возвращаясь к нашему примеру с двигателем вентилятора, если мы знаем, что высокое напряжение равно 24 В, низкое — 0 В, а рабочий цикл равен 50%, то мы можем определить среднее напряжение, умножив рабочий цикл на высокий уровень импульса. . Если вы хотите, чтобы двигатель работал быстрее, вы можете увеличить рабочий цикл ШИМ-выхода. Чем выше частота высоких импульсов, тем выше среднее напряжение и тем быстрее будет вращаться двигатель вентилятора. ЕСЛИ вы делаете свой собственный ШИМ-выход, подключая вентилятор к розетке и из розетки через равные промежутки времени 1 секунду в розетку и 1 секунду наружу, то вы действуете как цифровой выход, который управляет вентилятором при постоянном среднем уровне 12 В. .
Аналогия возникает, когда вы увеличиваете частоту включения и выключения из розетки, так что у вас есть только в розетке ½ секунды и вне розетки равной ½ секунды. В этот момент ваш рабочий цикл по-прежнему составляет 50%, но вы увеличили количество циклов в секунду до двух.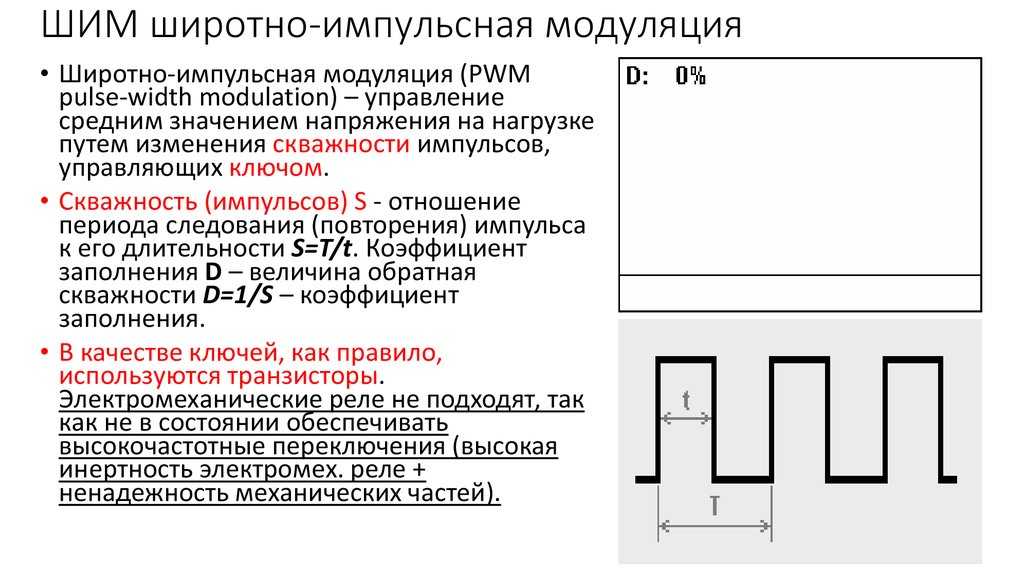 В электронике мы бы определили частоту как количество циклов в секунду или Герц (Гц). Вы увеличили скорость вентилятора. Эти ½ секунды и есть ширина импульса, который вы делаете.
В электронике мы бы определили частоту как количество циклов в секунду или Герц (Гц). Вы увеличили скорость вентилятора. Эти ½ секунды и есть ширина импульса, который вы делаете.
Возможно, вы уже поняли, что ШИМ, рабочий цикл и частота взаимосвязаны. Мы используем рабочий цикл и частоту для описания ШИМ, и мы часто говорим о частоте в отношении скорости. Например, частотно-регулируемый электродвигатель в реальном мире дает отклик, аналогичный аналоговому устройству. Отдельные импульсы, которые получает двигатель VFD, для нас неразличимы; насколько мы можем видеть, импульсы настолько быстры (обычно где-то в миллисекундах), что по стандартам реального мира это просто похоже на разгон двигателя.
Если вы возьмете рабочий цикл и умножите его на уровень высокого напряжения (который является цифровым состоянием «включено» или «1» для MCU), вы получите средний уровень напряжения, который видит двигатель. в этот момент.
Рабочий цикл x Уровень высокого напряжения = Среднее напряжение
Теперь добавьте туда слово «мгновенный», и вы получите представление о том, что вещи динамически меняются… что выглядит более аналогово (см.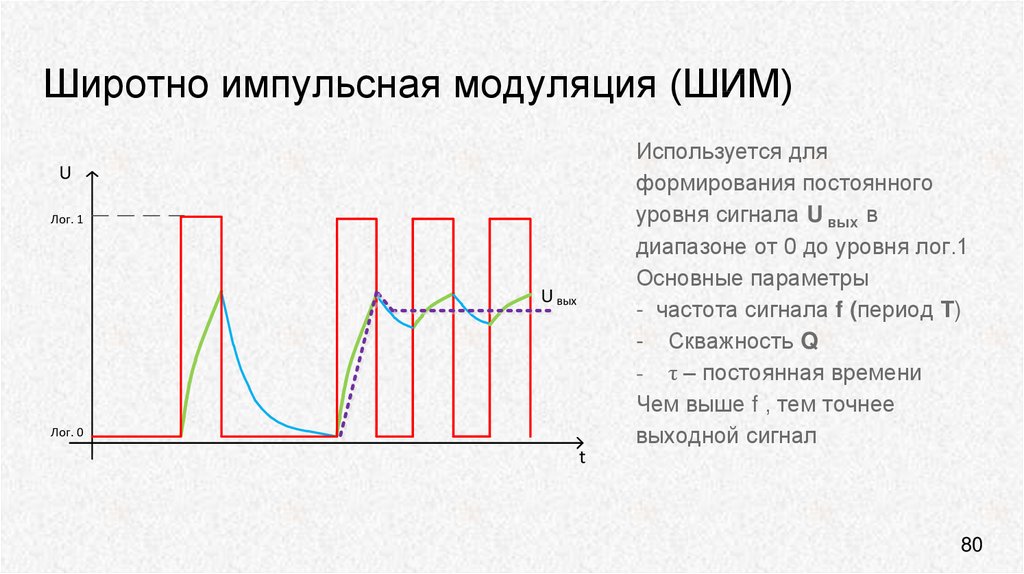 рис. 2):
рис. 2):
Мгновенный рабочий цикл x Уровень высокого напряжения = Мгновенное среднее напряжение
Рабочий цикл может измениться, чтобы повлиять на среднее напряжение, которое испытывает двигатель. Частота циклов может увеличиваться. Импульс может быть даже увеличен в длину. Все это также может происходить вместе, но в целом проще представить себе либо увеличение рабочего цикла , либо увеличение частоты для увеличения скорости двигателя. (Ширина импульса напрямую связана с рабочим циклом, поэтому, если вы решите увеличить ширину импульса, вы просто измените рабочий цикл.)
Единственное, что во всем этом не изменилось, так это уровень высокого напряжения, т.к. «включено» всегда одинаково для цифрового выхода; простое включение и выключение выхода с разной скоростью и в течение разного времени — вот как вы получаете широтно-импульсную модуляцию для имитации аналогового выхода. MCU цифровые. Примером чего-то, что может создать настоящий аналоговый выход, может быть преобразователь (что-то, что напрямую переводит физическое явление в аналоговый сигнал).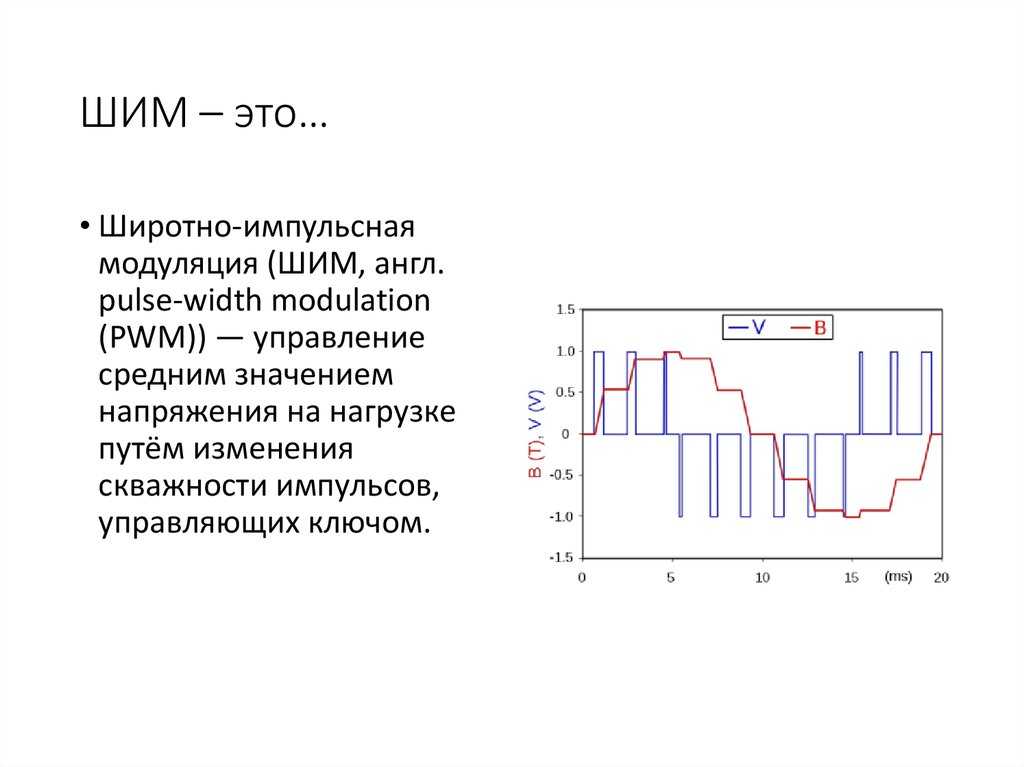 Но датчики — это еще одно аналоговое обсуждение.
Но датчики — это еще одно аналоговое обсуждение.
Широтно-импульсная модуляция — SparkFun Learn
Что такое широтно-импульсная модуляция?
Широтно-импульсная модуляция (ШИМ) — это причудливый термин для описания типа цифрового сигнала. Широтно-импульсная модуляция используется в различных приложениях, включая сложные схемы управления. Обычный способ, которым мы используем их здесь, в SparkFun, — это управление затемнением светодиодов RGB или управление направлением сервопривода. Мы можем добиться ряда результатов в обоих приложениях, потому что широтно-импульсная модуляция позволяет нам изменять время, в течение которого сигнал находится на высоком уровне, аналоговым способом. Хотя сигнал может быть только высоким (обычно 5 В) или низким (земля) в любое время, мы можем изменить пропорцию времени, в течение которого сигнал находится на высоком уровне, по сравнению с тем, когда он низкий в течение постоянного интервала времени.
Роботизированная клешня, управляемая серводвигателем с использованием широтно-импульсной модуляции
Рекомендуемая литература
Некоторые учебные пособия, которые вы можете рассмотреть в первую очередь:
- Напряжение, ток, сопротивление и закон Ома
- Аналоговый и цифровой
- Делители напряжения
- Цифровая логика
Рабочий цикл
Когда сигнал высокий, мы называем это «вовремя». Чтобы описать количество «вовремя», мы используем понятие рабочего цикла. Рабочий цикл измеряется в процентах. Процент рабочего цикла конкретно описывает процент времени, в течение которого цифровой сигнал включен в течение интервала или периода времени. Этот период является обратным частоте сигнала.
Чтобы описать количество «вовремя», мы используем понятие рабочего цикла. Рабочий цикл измеряется в процентах. Процент рабочего цикла конкретно описывает процент времени, в течение которого цифровой сигнал включен в течение интервала или периода времени. Этот период является обратным частоте сигнала.
Если цифровой сигнал проводит половину времени во включенном состоянии, а другую половину в выключенном, мы бы сказали, что цифровой сигнал имеет коэффициент заполнения 50% и напоминает идеальную прямоугольную волну. Если процент выше 50%, цифровой сигнал проводит больше времени в высоком состоянии, чем в низком, и наоборот, если рабочий цикл меньше 50%. Вот график, который иллюстрирует эти три сценария:
Примеры рабочего цикла 50%, 75% и 25%
Рабочий цикл 100% будет таким же, как установка напряжения на 5 Вольт (высокое). Рабочий цикл 0% будет таким же, как заземление сигнала.
Примеры
Вы можете управлять яркостью светодиода, регулируя рабочий цикл.
ШИМ, используемый для управления яркостью светодиода
С помощью светодиода RGB (красный, зеленый, синий) вы можете контролировать, сколько каждого из трех цветов вы хотите добавить в цветовую смесь, уменьшая их яркость в различной степени.
Основы смешения цветов
Если все три включены в равных количествах, результатом будет белый свет различной яркости. Синий, смешанный с зеленым, даст бирюзовый. В качестве более сложного примера попробуйте полностью включить красный цвет, рабочий цикл зеленого 50% и полностью выключить синий, чтобы получить оранжевый цвет.
ШИМ можно использовать для смешивания цветов RGB
Частота прямоугольной волны должна быть достаточно высокой при управлении светодиодами, чтобы получить надлежащий эффект затемнения. Волна с рабочим циклом 20% на частоте 1 Гц будет очевидна для ваших глаз, в то время как рабочий цикл с 20% на частоте 100 Гц или выше будет выглядеть тусклее, чем полностью включенный. По сути, период не может быть слишком большим, если вы стремитесь к эффекту затемнения светодиодов.
По сути, период не может быть слишком большим, если вы стремитесь к эффекту затемнения светодиодов.
Вы также можете использовать широтно-импульсную модуляцию для управления углом серводвигателя, прикрепленного к чему-то механическому, например, к руке робота. Сервоприводы имеют вал, который поворачивается в определенное положение в зависимости от линии управления. Наши серводвигатели имеют диапазон около 180 градусов.
Частота/период зависят от управления конкретным сервоприводом. Типичный серводвигатель должен обновляться каждые 20 мс с импульсом от 1 мс до 2 мс, или, другими словами, с рабочим циклом от 5 до 10% на волне 50 Гц. При импульсе длительностью 1,5 мс серводвигатель будет находиться в естественном положении под углом 90 градусов. При импульсе в 1 мс сервопривод будет в положении 0 градусов, а при импульсе в 2 мс сервопривод будет в положении 180 градусов. Вы можете получить полный диапазон движения, обновив сервопривод на промежуточное значение.
ШИМ используется для удержания серводвигателя под углом 90 градусов относительно его кронштейна
Ресурсы и дальнейшее развитие
Широтно-импульсная модуляция используется в различных приложениях, особенно для управления.
