Что такое синхронный двигатель с постоянными магнитами. Как устроен и работает синхронный двигатель. Каковы основные преимущества и недостатки синхронных двигателей. Где применяются синхронные двигатели с постоянными магнитами. Как выбрать синхронный двигатель для конкретной задачи.
Что такое синхронный двигатель с постоянными магнитами
Синхронный двигатель с постоянными магнитами представляет собой электрическую машину, в которой ротор вращается синхронно с магнитным полем статора. Основными компонентами такого двигателя являются:
- Статор с обмотками, создающими вращающееся магнитное поле
- Ротор с постоянными магнитами
- Воздушный зазор между статором и ротором
Главная особенность синхронного двигателя заключается в том, что скорость вращения ротора всегда равна скорости вращения магнитного поля статора, независимо от нагрузки на валу. Это обеспечивается взаимодействием постоянных магнитов ротора с вращающимся магнитным полем статора.
Принцип работы синхронного двигателя с постоянными магнитами
Как же работает синхронный двигатель с постоянными магнитами? Принцип его действия основан на следующих ключевых моментах:
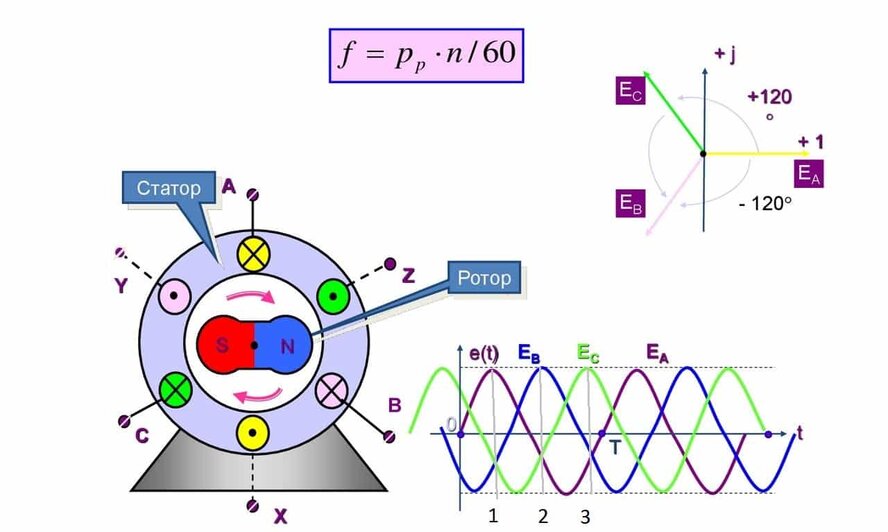
- При подаче трехфазного переменного тока на обмотки статора создается вращающееся магнитное поле.
- Это поле взаимодействует с магнитным полем постоянных магнитов ротора, создавая вращающий момент.
- Ротор начинает вращаться синхронно с полем статора, стремясь занять положение минимальной энергии.
- Скорость вращения ротора всегда равна скорости вращения поля статора и зависит только от частоты питающего напряжения.
Важно отметить, что для запуска синхронного двигателя требуются специальные методы, так как он не может самостоятельно достичь синхронной скорости из состояния покоя.
Конструкция и основные компоненты
Рассмотрим подробнее основные элементы конструкции синхронного двигателя с постоянными магнитами:
Статор
Статор представляет собой неподвижную часть двигателя и состоит из:- Корпуса из магнитомягкой стали
- Сердечника с пазами
- Трехфазной обмотки, уложенной в пазы
Обмотка статора обычно соединяется по схеме «звезда» для создания вращающегося магнитного поля.
Ротор
Ротор является подвижной частью двигателя и включает в себя:
- Вал
- Сердечник из магнитомягкой стали
- Постоянные магниты, закрепленные на поверхности или внутри сердечника
Для изготовления постоянных магнитов применяются высокоэнергетические материалы, такие как неодим-железо-бор или самарий-кобальт.
Преимущества синхронных двигателей с постоянными магнитами
Синхронные двигатели с постоянными магнитами обладают рядом существенных преимуществ по сравнению с другими типами электродвигателей:
- Высокий КПД (до 95% и выше) за счет отсутствия потерь на возбуждение
- Отличные динамические характеристики и быстрый отклик на управляющие воздействия
- Широкий диапазон регулирования скорости
- Возможность работы в режиме генератора без дополнительного возбуждения
- Низкий уровень шума и вибраций
Эти преимущества делают синхронные двигатели с постоянными магнитами привлекательным выбором для многих применений.
Недостатки и ограничения
При выборе синхронного двигателя с постоянными магнитами следует учитывать и некоторые его недостатки:
- Высокая стоимость из-за использования дорогих магнитных материалов
- Сложность производства и монтажа магнитов
- Риск размагничивания при перегреве или сильных ударах
- Необходимость в сложной системе управления для эффективной работы
- Ограниченная перегрузочная способность
Эти факторы могут ограничивать применение синхронных двигателей с постоянными магнитами в некоторых областях.
Области применения
Где же используются синхронные двигатели с постоянными магнитами? Основные сферы их применения включают:
- Промышленные приводы с высокими требованиями к точности и динамике
- Робототехника и автоматизация
- Электротранспорт (электромобили, электровелосипеды)
- Бытовая техника (стиральные машины, кондиционеры)
- Компьютерные системы (жесткие диски, вентиляторы охлаждения)
- Медицинское оборудование
- Аэрокосмическая техника
В этих областях синхронные двигатели с постоянными магнитами успешно конкурируют с другими типами электродвигателей благодаря своим уникальным характеристикам.

Особенности управления и регулирования
Управление синхронным двигателем с постоянными магнитами имеет свои особенности. Какие методы используются для эффективного управления такими двигателями?
- Векторное управление для точного контроля момента и скорости
- Прямое управление моментом для быстрого отклика в динамических режимах
- Использование датчиков положения ротора (энкодеров) или бездатчиковых алгоритмов
- Применение современных микроконтроллеров и силовой электроники
Эти методы позволяют максимально реализовать потенциал синхронных двигателей с постоянными магнитами и обеспечить их эффективную работу в широком диапазоне режимов.
Выбор и расчет синхронного двигателя
Как правильно выбрать синхронный двигатель с постоянными магнитами для конкретной задачи? При выборе и расчете следует учитывать следующие факторы:
- Требуемые мощность и крутящий момент
- Диапазон рабочих скоростей
- Условия эксплуатации (температура, влажность, вибрации)
- Габаритные ограничения
- Требования к динамическим характеристикам
- Совместимость с системой управления
Правильный выбор двигателя позволяет оптимизировать производительность и энергоэффективность всей системы.

Тенденции развития и перспективы
Каковы перспективы развития синхронных двигателей с постоянными магнитами? Основные тенденции включают:
- Разработку новых магнитных материалов с улучшенными характеристиками
- Оптимизацию конструкции для повышения удельной мощности
- Совершенствование методов управления и алгоритмов работы
- Интеграцию двигателей с силовой электроникой и датчиками
- Расширение области применения в новых отраслях промышленности
Эти тенденции указывают на то, что роль синхронных двигателей с постоянными магнитами в современной технике будет только возрастать.
Принцип работы синхронного двигателя — услуги электромонтажа, строительства и ремонта
Для двигателей с постоянными магнитами используются специальные двигатели с внешним ускорением. В отличие от асинхронных устройств, ускорение ротора в синхронном двигателе должно достигать скорости магнитного поля. При этом ток подается в обмотку ротора от внешнего источника, а не индуцируется магнитным полем статора, поэтому он не зависит от скорости вращения вала. Следовательно, синхронный двигатель переменного тока достигает постоянной скорости вращения ротора независимо от нагрузки. Специфический принцип работы этих устройств повлиял на их пуск и регулирование скорости.
Синхронный двигатель состоит из основных частей – якоря и индукционной катушки. Обычно он сконструирован таким образом, что якорь расположен на статоре, а индуктор – на роторе, разделенные воздушным зазором. Эти устройства характеризуются высоким коэффициентом мощности. Важным преимуществом является то, что их можно использовать при любом напряжении.
Синхронный двигатель состоит из двух основных частей – статора и ротора. Статор – это неподвижная часть устройства, а ротор – подвижная часть. Якорь состоит из одной или нескольких обмоток переменного тока. Когда двигатель работает, токи, протекающие в якоре, заставляют магнитное поле вращаться, пересекаясь с полем индуктора и преобразуя энергию. Поле якоря иначе называется полем реакции якоря. В генераторе переменного тока это поле создается катушкой индуктивности.
Индуктор состоит из электромагнита постоянного тока, называемого полюсами. Во всех синхронных двигателях индукторы бывают двух видов: с прямым полюсом и без прямого полюса, которые имеют различное расположение полюсов. Конструкция статора состоит из корпуса и сердечника с двухфазными и трехфазными обмотками. Сами обмотки могут быть распределенными и концентрированными.
Для уменьшения магнитного сопротивления и увеличения магнитного потока в роторе и статоре используются ферромагнитные сердечники, которые изготавливаются из электротехнической стали.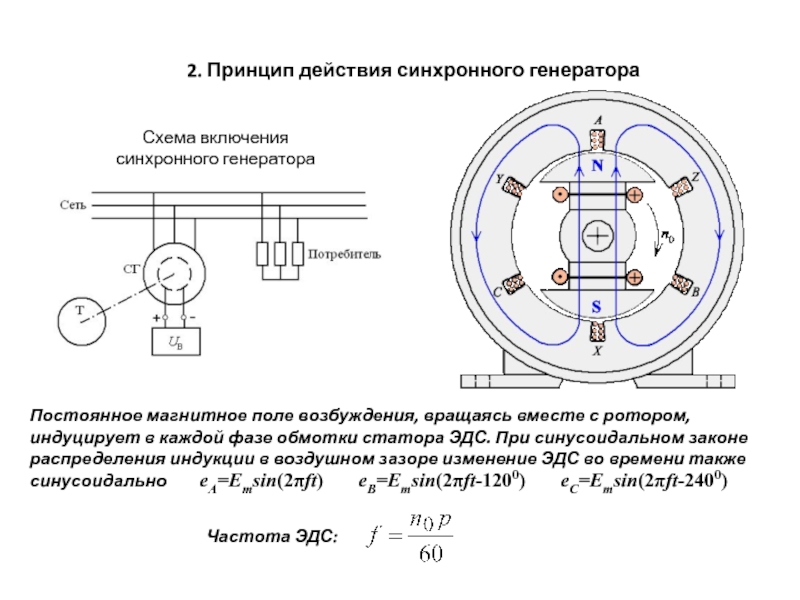 Он обладает интересными свойствами, например, повышенным содержанием кремния, что увеличивает его электрическое сопротивление и уменьшает вихревые токи.
Он обладает интересными свойствами, например, повышенным содержанием кремния, что увеличивает его электрическое сопротивление и уменьшает вихревые токи.
Каждый синхронный электродвигатель имеет важный параметр – электромагнитный момент. Это происходит, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Это поле создается трехфазным током, протекающим через обмотку якоря.
В режиме холостого хода оси магнитных полей ротора и статора совпадают. Следовательно, электромагнитные силы между их полюсами принимают радиальное направление, и значение электромагнитного момента узла становится равным нулю. Когда устройство переходит в режим работы двигателя, момент внешней нагрузки, приложенный к валу, начинает действовать на ротор. В результате ротор смещается на определенный угол относительно направления вращения.
Это электромагнитное взаимодействие между ротором и статором создает электромагнитные силы в направлении вращения. Таким образом, действие вращающегося электромагнитного момента стремится преодолеть действие внешнего вращающего момента. Максимальное значение электромагнитного момента образует угол 90 градусов, когда полюса ротора выровнены между осями полюсов статора.
Максимальное значение электромагнитного момента образует угол 90 градусов, когда полюса ротора выровнены между осями полюсов статора.
Если момент нагрузки, приложенный к валу двигателя, превышает максимальный электромагнитный момент, двигатель будет остановлен внешним моментом. Это приводит к тому, что через обмотку якоря протекает очень большой ток, когда двигатель неподвижен. Это состояние является сигналом тревоги, это отсутствие синхронизации и не должно допускаться на практике.
В любом случае, необходимо стабилизировать выходное напряжение генераторной установки. Для этого достаточно питать обмотку ротора от источника, напряжение которого постоянно и не изменяется при колебаниях скорости.
Содержание
Конструкция синхронного двигателя
Его конструкция практически идентична конструкции 3-фазного асинхронного двигателя, за исключением того, что на ротор подается источник постоянного тока.
На рисунке показана конструкция двигателя этого типа. На статор подается 3-фазное напряжение, а на ротор – источник постоянного тока.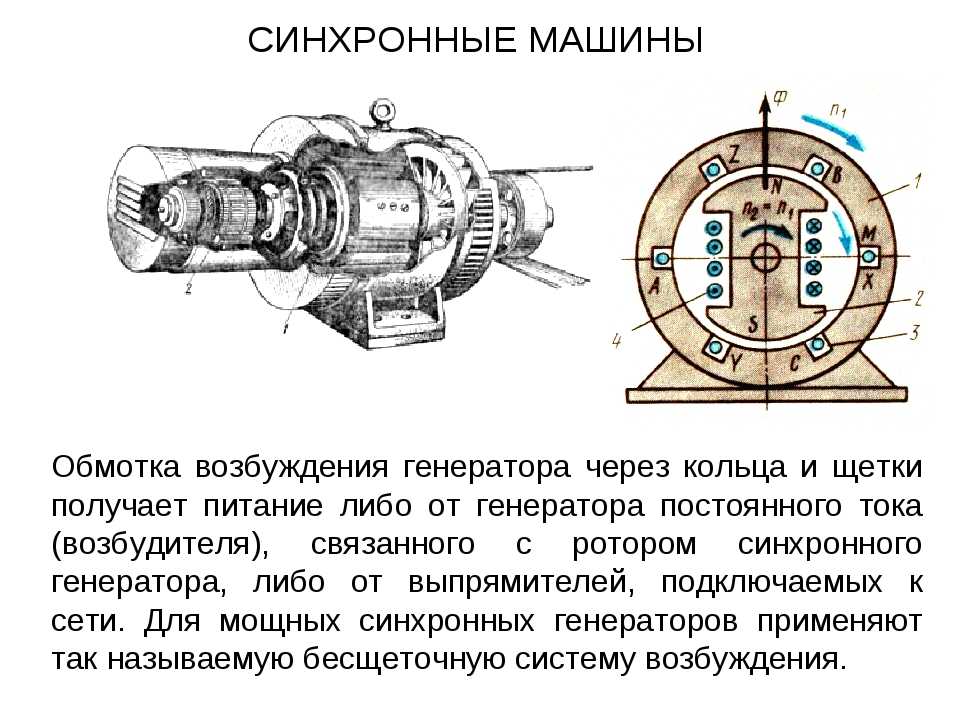
Конструкция синхронного двигателя
Основные характеристики синхронных двигателей:
- Синхронные двигатели не являются самозапускающимися механизмами. Они требуют определенного внешнего воздействия для получения определенной синхронной скорости.
- Двигатель работает синхронно с частотой питающей сети. Поэтому при непрерывном питании частотой он ведет себя как двигатель с постоянной скоростью.
- Этот двигатель обладает уникальной характеристикой, работая при любом коэффициенте мощности. Именно поэтому они используются для увеличения коэффициента мощности.
Фильм: Конструкция и принцип работы синхронного двигателя
Характеристика двигателя такова, что скорость вращения ротора и скорость магнитного потока равны. Поэтому скорость вращения вала двигателя независима и не зависит от величины подключенной нагрузки. Это возможно потому, что индукционная катушка синхронного двигателя представляет собой электромагнит, в некоторых случаях – постоянный магнит.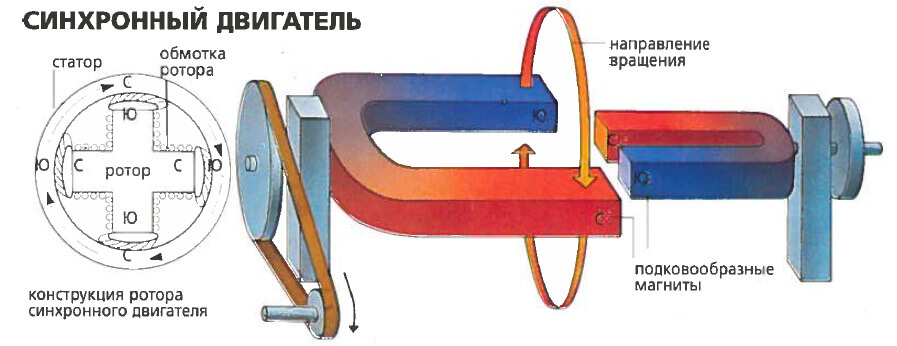
Конструктивные особенности и принцип работы
Основными компонентами синхронного электродвигателя являются статор, который неподвижен, и ротор, иначе называемый возбудителем. Статор также называют якорем, но это не меняет его сути. Эти части двигателя отделены друг от друга слоем воздуха. Между промежутками находится трехфазная обмотка, которая обычно соединена в звезду.
Когда двигатель запускается, токи якоря создают движущееся магнитное поле, а вращение поля создает перекрывающееся поле индуктора. Результатом работы этих двух полей является энергия. Магнитное поле статора по своей природе является его полем реакции. При работе генераторов эта энергия вырабатывается индукторами.
Полюса – это электромагниты постоянного тока статора. Статоры синхронных двигателей могут быть спроектированы по различным схемам: неявно-полюсной и явно-полюсной. Они отличаются расположением полюсов.
Для снижения магнитного сопротивления и оптимизации условий магнитного поля используются сердечники из ферромагнитного материала. Они расположены в роторе и якоре. Они изготавливаются из электротехнической стали, которая содержит высокую долю кремния. Это уменьшает вихревые токи и увеличивает электрическое сопротивление стали.
Они расположены в роторе и якоре. Они изготавливаются из электротехнической стали, которая содержит высокую долю кремния. Это уменьшает вихревые токи и увеличивает электрическое сопротивление стали.
Синхронные двигатели основаны на взаимном взаимодействии полюсов возбудителя и статора. При запуске двигатель разгоняется до скорости магнитного потока. Только при этом условии двигатель запускается в синхронном режиме. Во время этого процесса магнитные поля образуют спайку, и происходит вход синхронизации.
Долгое время для разгона двигателя использовался отдельный стартерный двигатель. Он был механически соединен с синхронным двигателем. Во время запуска ротор двигателя ускоряется и достигает синхронной скорости. Затем двигатель самостоятельно переключился на синхронное движение. При выборе мощности пускового двигателя в качестве ориентира использовалось 15% от номинальной мощности разгоняемого двигателя. Этого запаса мощности было достаточно для запуска синхронного двигателя даже при низкой нагрузке.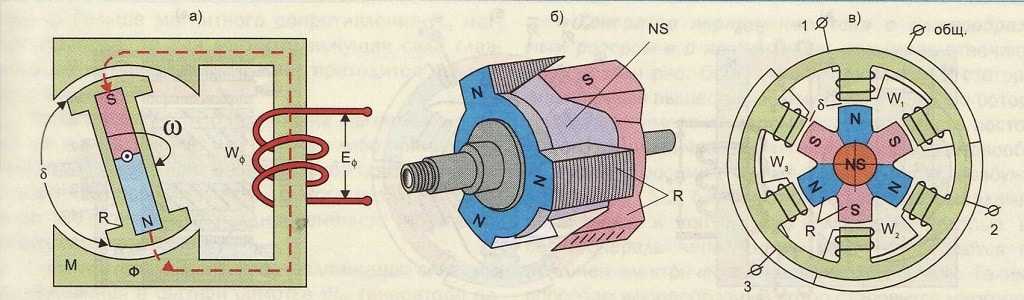
Этот метод ускорения более сложен и значительно увеличивает стоимость оборудования. В современных конструкциях синхронные двигатели не имеют такой схемы ускорения. Используется другая схема ускорения. Реостат используется для короткого замыкания обмоток индукционной катушки так же, как и для асинхронного двигателя. Для запуска на ротор устанавливается обмотка с сепаратором, которая также является неподвижной обмоткой для предотвращения раскачивания ротора во время синхронизации.
Когда ротор достигает номинальной скорости, постоянный ток подключается к возбудителю. Однако для запуска двигателей с постоянными магнитами требуются внешние пусковые двигатели.
В криогенных синхронных двигателях используется инвертированная конструкция. В этом случае якорь и возбудитель меняются местами, причем возбудитель находится на статоре, а якорь – на роторе. В таких машинах обмотки возбуждения изготавливаются из сверхпроводящих материалов.
Преимущества и недостатки
Синхронные двигатели имеют преимущество перед асинхронными двигателями в том, что возбуждение постоянным током от внешнего источника дает возможность работать при значительном значении коэффициента мощности. Эта функция позволяет увеличить значение коэффициента мощности для всей питающей сети за счет использования синхронного двигателя.
Эта функция позволяет увеличить значение коэффициента мощности для всей питающей сети за счет использования синхронного двигателя.
У синхронных двигателей есть и другие преимущества:
- Синхронные двигатели работают при более высоком коэффициенте мощности, что приводит к снижению потребления энергии и потерь. КПД синхронного двигателя выше при одинаковой мощности по сравнению с асинхронным двигателем.
- У синхронных двигателей вращающий момент напрямую зависит от напряжения сети. Поэтому при падении напряжения он сохраняет свою мощность в большей степени, чем асинхронные двигатели. Это является одним из факторов надежности таких конструкций двигателей.
Недостатки следующие:
- При сравнении конструкций этих двух двигателей видно, что синхронные двигатели спроектированы более сложным образом, поэтому их стоимость будет выше.
- Еще одним недостатком синхронных двигателей является необходимость в источнике тока в виде выпрямителя или другого источника постоянного тока.

- Двигатель запускается по сложной схеме.
- Скорость вращения вала двигателя можно регулировать только одним способом – с помощью преобразователя частоты.
Вывод заключается в том, что преимущества синхронных двигателей перевешивают недостатки. Поэтому двигатели этого типа широко используются в технологических процессах, где происходит непрерывный процесс и не требуется частая остановка и запуск оборудования: в мельничном производстве, компрессорах, дробилках, насосах и т.д.
Выбор двигателяК покупке синхронного двигателя следует подходить с учетом следующих факторов:
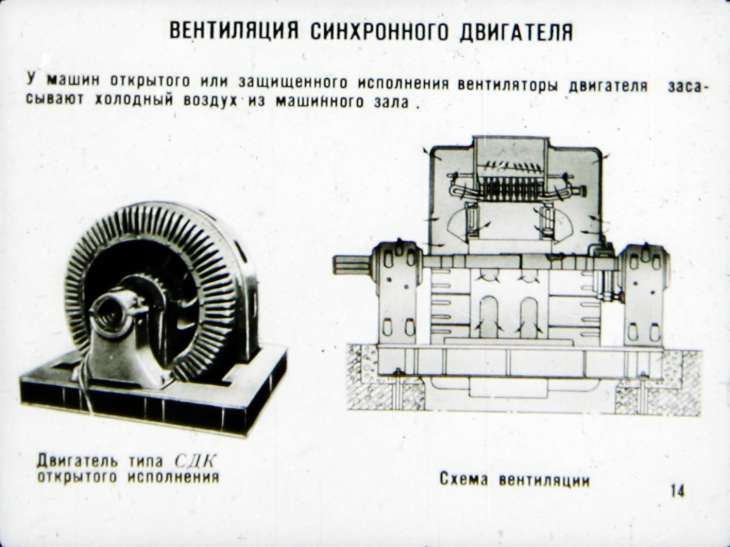
- Условия эксплуатации электродвигателя. В зависимости от условий выбирается тип двигателя, который может быть защищенным, открытым или закрытым. Синхронные двигатели также различаются по степени защиты токоведущих частей от влаги, температуры, агрессивных сред. В случае взрывоопасного производства существуют специальные средства защиты, которые предотвращают образование искр в двигателе.
- Особенности соединения электродвигателя с потребителем.
Они используются для компенсации коэффициента мощности в сети и стабилизации номинального напряжения при подключении нагрузки к двигателю. Нормальным режимом работы синхронного компенсатора является перегрузка при подаче реактивной мощности в сеть.
Эти компенсаторы также называют генераторами реактивной мощности, поскольку они предназначены для выполнения той же задачи, что и конденсаторные батареи на подстанциях. В случае падения мощности нагрузки часто необходимо, чтобы синхронные компенсаторы работали в режиме без возбуждения, потребляя реактивную мощность и индуктивный ток, поскольку напряжение сети имеет тенденцию к повышению, и чтобы стабилизировать его на рабочем уровне, в сеть должен быть подан индуктивный ток, который понижает напряжение сети.
Для этого синхронные компенсаторы оснащаются автоматическим регулятором возбуждения. Регулятор изменяет ток возбуждения таким образом, чтобы напряжение на компенсаторе не изменялось.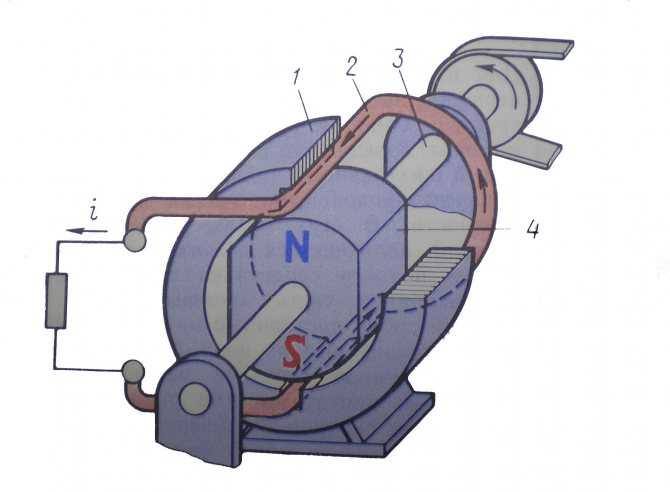
Широко распространенное использование асинхронных двигателей при значительных недогрузках ухудшает работу электростанций и систем, поскольку снижается коэффициент мощности системы, что приводит к незапланированным потерям и недоиспользованию активной мощности. Это привело к необходимости использования синхронных двигателей, особенно в приводах машин большой мощности.
Сравнивая синхронные двигатели с асинхронными, синхронные двигатели имеют преимущество в том, что они работают с коэффициентом мощности 1. Они не потребляют реактивную мощность из сети, а если они перегружены, то даже поставляют некоторую реактивную мощность в сеть.
В результате улучшается коэффициент мощности сети и снижаются потери напряжения, что увеличивает коэффициент мощности генераторов электростанции. Наибольший крутящий момент синхронного электродвигателя напрямую зависит от напряжения, а для синхронного электродвигателя – от квадрата напряжения.
Поэтому при пониженном напряжении синхронный электродвигатель сохраняет значительную нагрузочную способность. Кроме того, возможность увеличения тока возбуждения синхронных двигателей позволяет повысить их эксплуатационную надежность при резких перепадах напряжения и оптимизировать работу всей энергосистемы в таких случаях.
Кроме того, возможность увеличения тока возбуждения синхронных двигателей позволяет повысить их эксплуатационную надежность при резких перепадах напряжения и оптимизировать работу всей энергосистемы в таких случаях.
Благодаря большому воздушному зазору дополнительные потери в стальных сердечниках и роторе синхронных двигателей ниже, чем в асинхронных двигателях. Поэтому КПД синхронных двигателей зачастую выше.
Однако конструкция синхронных двигателей намного сложнее, и для их работы необходим возбудитель или другое силовое устройство возбуждения. Поэтому синхронные двигатели стоят дороже, чем асинхронные двигатели с короткозамкнутым ротором.
Пуск и регулирование скорости синхронных двигателей связаны с определенными трудностями. Однако при более высоких мощностях их преимущества перевешивают недостатки. Поэтому они используются во многих местах, где нет необходимости в частом запуске и остановке оборудования и регулировании скорости вращения двигателя с приводными механизмами насосов, компрессоров, мельниц и т.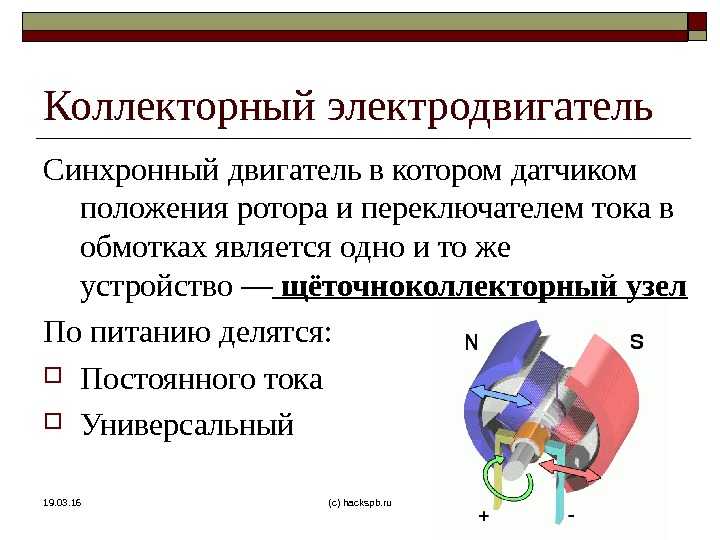 д.
д.
Зависимость скорости вращения ротора от напряжения питания используется для эффективного управления режимами работы синхронного двигателя.
МЕТОДЫ И УСТРОЙСТВА ПЛАВНОГО ПУСКА И УПРАВЛЕНИЯ
Мягкий пуск может быть достигнут за счет использования вспомогательного двигателя или асинхронного пуска.
Первый случай очевиден, а во втором используется принцип асинхронного вращения электромагнитных полей, вызывающий эффект проскальзывания в начальной фазе работы. Каждый из этих вариантов имеет свои преимущества и недостатки.
Зависимость скорости вращения ротора от напряжения питания используется для эффективного управления условиями работы синхронного двигателя.
Для заданного значения составляющей тока это управление сводится к изменению мощности на валу. Он может быть реализован различными способами, но наиболее эффективными считаются электронные устройства (преобразователи).
Для управления режимами используются современные полупроводниковые элементы. К последним относятся транзисторы, тиристоры и симисторы.
С помощью этих быстродействующих элементов можно изменять мощность в нагрузке, используя принципы широтно-импульсного или фазово-импульсного управления.
© 2014-2021 Все права защищены.
Материал на этой странице представлен исключительно в информационных целях, является мнением автора и не должен использоваться в качестве руководства или нормативного документа.
Дело в том, что этот материал содержит большое количество кремния, который значительно снижает вихревые токи и улучшает электрическое сопротивление сердечника.
Синхронные двигатели. Эксплуатация и применение. Особенности .
Характерной особенностью работы двигателя является равенство скорости вращения ротора и скорости магнитного потока. Поэтому скорость вращения вала двигателя не зависит и не изменяется от величины подключенной нагрузки. Это возможно потому, что индукционная катушка синхронного двигателя представляет собой электромагнит, в некоторых случаях – постоянный магнит.
Число пар полюсов ротора совпадает с числом пар полюсов движущегося магнитного поля. Взаимодействие этих полюсов позволяет выравнивать скорость вращения ротора. В этот момент вал можно подвергать любой нагрузке. Это не влияет на скорость вращения индуктора.
Взаимодействие этих полюсов позволяет выравнивать скорость вращения ротора. В этот момент вал можно подвергать любой нагрузке. Это не влияет на скорость вращения индуктора.
Конструкция и принцип работы
Основными частями синхронного двигателя являются статор, который неподвижен, и ротор, иначе называемый индуктором. Статор также называют якорем, но это не меняет его сути. Эти части двигателя отделены друг от друга слоем воздуха. Между промежутками находится трехфазная обмотка, обычно соединенная в соединение звездой.
Когда двигатель начинает работать, токи якоря создают движущееся магнитное поле, а его вращение приводит к перекрытию поля индуктора. Результатом работы этих двух полей является энергия. Магнитное поле статора по своей природе является его полем реакции. При работе генераторов эта энергия вырабатывается индукторами.
Полюса – это электромагниты постоянного тока статора. Статоры синхронных двигателей могут быть спроектированы по различным схемам: неявно-полюсной и явно-полюсной. Они отличаются расположением полюсов.
Они отличаются расположением полюсов.
Для снижения магнитного сопротивления и оптимизации условий магнитного поля используются сердечники из ферромагнитного материала. Они расположены в роторе и якоре. Они изготавливаются из электротехнической стали, которая содержит высокую долю кремния. Это уменьшает вихревые токи и увеличивает электрическое сопротивление стали.
Синхронные двигатели основаны на взаимном взаимодействии полюсов возбудителя и статора. При запуске двигатель разгоняется до скорости магнитного потока. Только при этом условии двигатель запускается в синхронном режиме. Во время этого процесса магнитные поля образуют спайку, и происходит вход синхронизации.
Долгое время для разгона двигателя использовался отдельный стартерный двигатель. Он был механически соединен с синхронным двигателем. Во время запуска ротор двигателя ускоряется и достигает синхронной скорости.
Затем двигатель самостоятельно переключился на синхронное движение. При выборе мощности пускового двигателя в качестве ориентира использовалось 15% от номинальной мощности разгоняемого двигателя.
Этого запаса мощности было достаточно для запуска синхронного двигателя даже при низкой нагрузке.
Этот метод ускорения более сложен и значительно увеличивает стоимость оборудования. В современных конструкциях синхронные двигатели не имеют такой схемы ускорения. Используется другая схема ускорения.
Реостат используется для короткого замыкания обмоток индукционной катушки так же, как и для асинхронного двигателя.
Для запуска на ротор устанавливается обмотка с сепаратором, которая также является неподвижной обмоткой для предотвращения раскачивания ротора во время синхронизации.
Когда ротор достигает номинальной скорости, постоянный ток подключается к возбудителю. Однако для запуска двигателей с постоянными магнитами требуются внешние пусковые двигатели.
В криогенных синхронных двигателях используется инвертированная конструкция. В этом случае якорь и возбудитель меняются местами, причем возбудитель находится на статоре, а якорь – на роторе. В таких машинах обмотки возбуждения изготавливаются из сверхпроводящих материалов.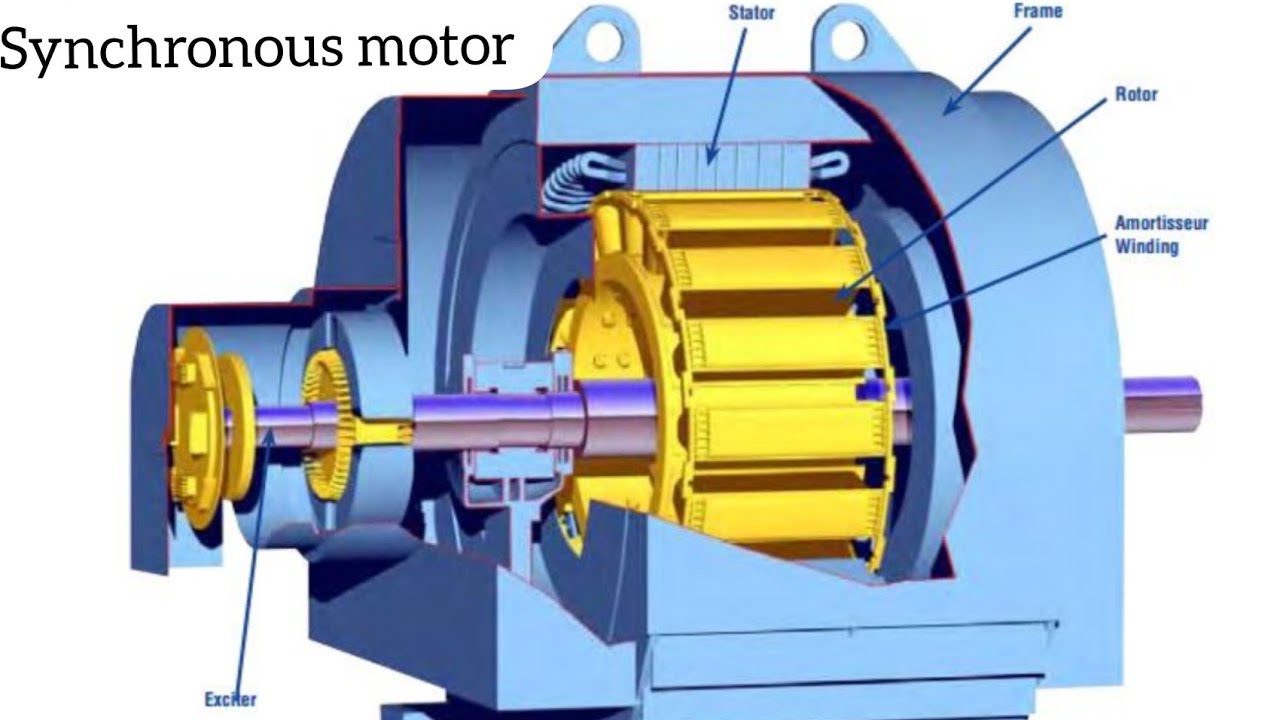
Преимущества и недостатки
Синхронные двигатели имеют преимущество перед асинхронными двигателями в том, что возбуждение постоянным током от внешнего источника дает возможность работать при значительном значении коэффициента мощности. Эта функция позволяет увеличить значение коэффициента мощности для всей питающей сети за счет использования синхронного двигателя.
У синхронных двигателей есть и другие преимущества:
- Синхронные двигатели работают при более высоком коэффициенте мощности, что приводит к снижению потребления энергии и потерь. КПД синхронного двигателя выше при одинаковой мощности по сравнению с асинхронным двигателем.
- У синхронных двигателей вращающий момент напрямую зависит от напряжения сети. Поэтому при падении напряжения он сохраняет свою мощность в большей степени, чем асинхронные двигатели. Это является одним из факторов надежности таких конструкций двигателей.
Недостатки следующие:
- При сравнении конструкций этих двух двигателей видно, что синхронные двигатели спроектированы более сложным образом, поэтому их стоимость будет выше.

- Еще одним недостатком синхронных двигателей является необходимость в источнике тока в виде выпрямителя или другого источника постоянного тока.
- Двигатель запускается по сложной схеме.
- Скорость вращения вала двигателя можно регулировать только одним способом – с помощью преобразователя частоты.
Вывод заключается в том, что преимущества синхронных двигателей перевешивают недостатки.
Поэтому двигатели этого типа широко используются в технологических процессах, где происходит непрерывный процесс и не требуется частая остановка и запуск оборудования: в мельничном производстве, компрессорах, дробилках, насосах и т.д.
Выбор двигателя
К покупке синхронного двигателя следует подходить с учетом следующих факторов:
- Условия эксплуатации электродвигателя. В зависимости от условий выбирается тип двигателя, который может быть защищенным, открытым или закрытым. Синхронные двигатели также различаются по степени защиты токоведущих частей от влаги, температуры, агрессивных сред.
 В случае взрывоопасного производства существуют специальные средства защиты, которые предотвращают образование искр в двигателе.
В случае взрывоопасного производства существуют специальные средства защиты, которые предотвращают образование искр в двигателе. - Особенности соединения электродвигателя с потребителем.
Синхронные компенсаторы
Они используются для компенсации коэффициента мощности в сети и стабилизации номинального напряжения при подключении нагрузки к двигателю. Нормальным режимом работы синхронного компенсатора является перегрузка, когда реактивная мощность реактивная мощность.
Эти компенсаторы также называют генераторами реактивной мощности, поскольку они предназначены для выполнения той же задачи, что и конденсаторные батареи на подстанциях.
В случае падения мощности нагрузки синхронным компенсаторам часто приходится работать в режиме без возбуждения с потреблением реактивной мощности и индуктивного тока, поскольку напряжение сети имеет тенденцию к повышению, и для его стабилизации на рабочем уровне необходимо зарядить сеть индуктивным током, что вызывает падение напряжения сети.
Для этого синхронные компенсаторы оснащаются автоматическим регулятором возбуждения. Регулятор изменяет ток возбуждения таким образом, чтобы напряжение на компенсаторе не изменялось.
Сфера применения
Широко распространенное использование асинхронных двигателей при значительных недогрузках ухудшает работу электростанций и систем, поскольку снижается коэффициент мощности системы, что приводит к незапланированным потерям и недоиспользованию активной мощности. Это привело к необходимости использования синхронных двигателей, особенно в приводах машин большой мощности.
Сравнивая синхронные двигатели с асинхронными, синхронные двигатели имеют преимущество в том, что они работают с коэффициентом мощности 1. Они не потребляют реактивную мощность из сети, а если они перегружены, то даже поставляют некоторую реактивную мощность в сеть.
В результате улучшается коэффициент мощности сети и снижаются потери напряжения, что увеличивает коэффициент мощности генераторов электростанции. Наибольший крутящий момент синхронного электродвигателя напрямую зависит от напряжения, а для синхронного электродвигателя – от квадрата напряжения.
Наибольший крутящий момент синхронного электродвигателя напрямую зависит от напряжения, а для синхронного электродвигателя – от квадрата напряжения.
Поэтому при пониженном напряжении синхронный электродвигатель сохраняет значительную нагрузочную способность. Кроме того, возможность увеличения тока возбуждения синхронных двигателей позволяет повысить их эксплуатационную надежность при резких перепадах напряжения и оптимизировать работу всей энергосистемы в таких случаях.
Благодаря большому воздушному зазору дополнительные потери в стальных сердечниках и роторе синхронных двигателей ниже, чем в асинхронных двигателях. Поэтому КПД синхронных двигателей зачастую выше.
Однако конструкция синхронных двигателей намного сложнее, и для их работы необходим возбудитель или другое силовое устройство возбуждения. Поэтому синхронные двигатели стоят дороже, чем асинхронные двигатели с короткозамкнутым ротором.
Пуск и регулирование скорости синхронных двигателей связаны с определенными трудностями. Однако при больших мощностях их преимущества перевешивают недостатки. Поэтому их используют во многих местах, где нет необходимости в частом запуске, остановке оборудования, а также нет необходимости регулировать скорость вращения двигателя с приводными механизмами насосов, компрессоров, мельниц и т.д.
Однако при больших мощностях их преимущества перевешивают недостатки. Поэтому их используют во многих местах, где нет необходимости в частом запуске, остановке оборудования, а также нет необходимости регулировать скорость вращения двигателя с приводными механизмами насосов, компрессоров, мельниц и т.д.
Похожие темы:
Бесщеточный синхронный двигатель с постоянными магнитами – Намерение] Бесщеточные синхронные двигатели с постоянными магнитами (PMSM) имеют несколько названий: бесщеточный двигатель постоянного тока, бесщеточный двигатель PMAC и двигатель с электронным управлением (ECM) ….. … Руководство технического переводчика
синхронный двигатель
СИНХРОННЫЙ ДВИГАТЕЛЬ
синхронный двигатель – Синхронные электрические машины, работающие в режиме двигателя.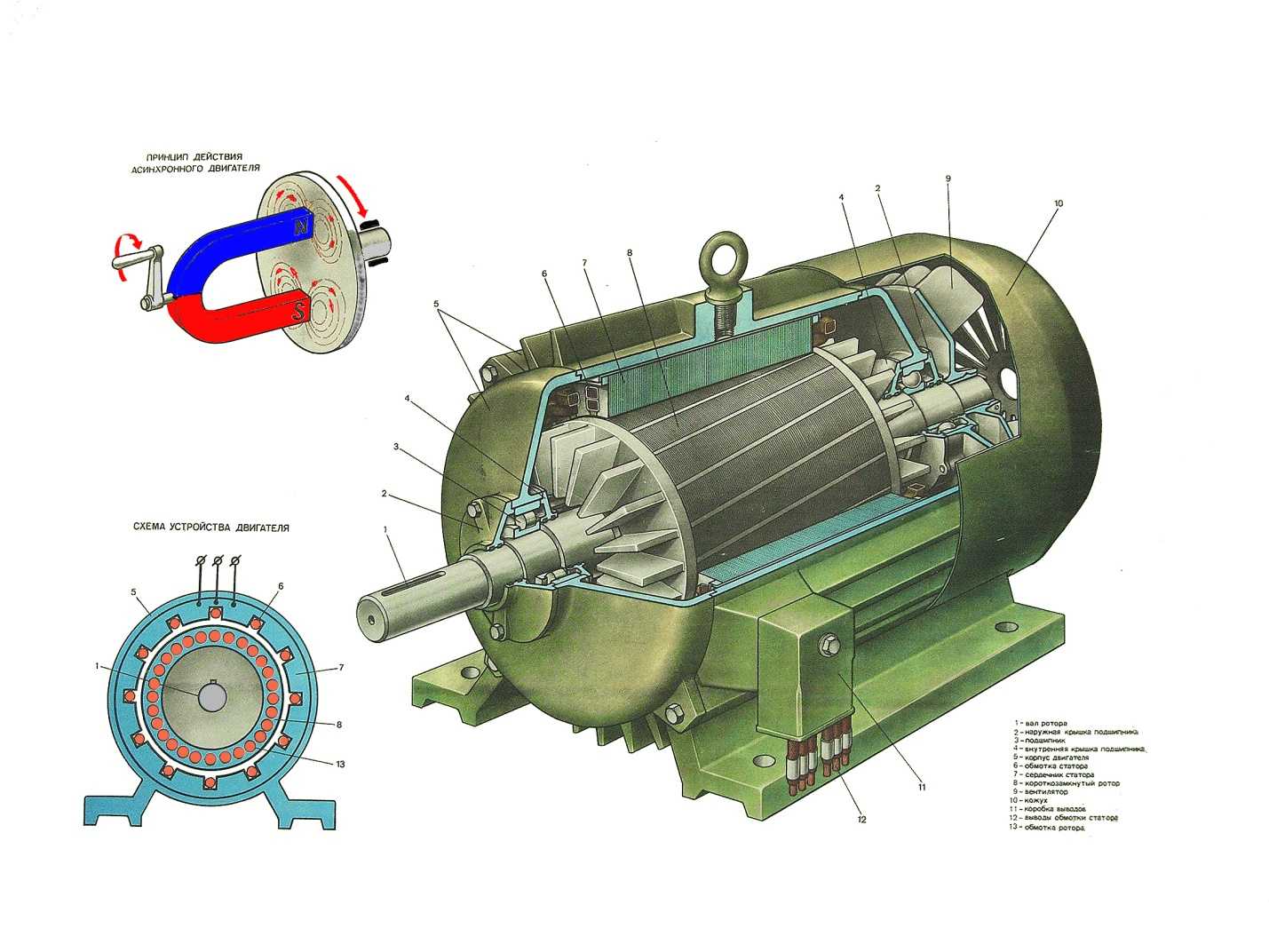 Он используется в электроприводах, не требующих регулирования скорости вращения вала двигателя (например, в насосах). * * * * * * * Синхронный электродвигатель Синхронный электродвигатель,…
Он используется в электроприводах, не требующих регулирования скорости вращения вала двигателя (например, в насосах). * * * * * * * Синхронный электродвигатель Синхронный электродвигатель,…
СИНХРОННЫЙ ДВИГАТЕЛЬ – Синхронная электрическая машина, работающая в режиме двигателя. По сравнению с асинхронным двигателем, он имеет более высокий коэффициент мощности и перегрузочную способность. Однако из-за необходимости возбуждения постоянным током от возбудителя или ……
Бесщеточный синхронный двигатель с постоянными магнитами
– Намерение] Бесщеточные синхронные двигатели с постоянными магнитами (PMSM) имеют несколько названий: бесщеточный двигатель постоянного тока, бесщеточный двигатель PMAC и двигатель с электронным управлением (ECM) ….. … Руководство технического переводчикаДвигатель переменного тока – Электродвигатели различной мощности (750 Вт, 25 Вт, для CD-плеера, для игрушки, для дисковода) Электродвигатель – это электрическая машина, в которой электрическая энергия преобразуется в механическую, побочным эффектом является выделение тепла…. . … Википедия
. … Википедия
Синхронный – ae, oe; o/nen, o/n 1) книга. Совпадающий по времени, происходящий одновременно с чем-л. Синхронные движения танцующей пары. Синхронный перевод. Синонимы: одновременный 2) Основанный на применении принципа синхронности,… Популярный словарь русского языка
SYNCHRONIC – [ Словарь иностранных языков
синхронный компенсатор – Синхронный электродвигатель, работающий без активной нагрузки, предназначенный для улучшения коэффициента мощности (cosφ) и регулирования напряжения в линиях и сетях электропередачи (см. Компенсационные устройства). W… Большая советская энциклопедия
Гистерезисный электродвигатель – Синхронный электродвигатель, в котором крутящий момент создается за счет гистерезисного намагничивания массивного ротора с сердечником из магнитного материала, имеющего широкую петлю гистерезиса. Для мощности до 100 Вт и частоты до 400 … Большая советская энциклопедия
Читайте далее:
- Шаговые двигатели: свойства и практические схемы управления.
 Часть 2.
Часть 2. - Синхронные компенсаторы в электрических сетях; School of Electrical Engineers: Electrical and Electronic Engineering.
- Рабочие характеристики асинхронного двигателя; Школа для электриков: электротехника и электроника.
- Векторное и скалярное управление преобразователями частоты – принцип работы, система управления.
- Асинхронный электродвигатель – конструкция, принцип работы, типы асинхронных двигателей.
- Что такое якорь в электродвигателе – Станция техобслуживания ЭкоПаркинг.
- Векторное управление вентильным двигателем в безредукторном сервоприводе – темы научных работ по электротехнике, электронике, информатике читайте бесплатно тексты научных работ в электронной библиотеке КиберЛенинка.
Области применения синхронных двигателей, характеристики
Электродвигатели с ротором на постоянных магнитах являются наиболее вероятной моделью «вечного двигателя». Многие ученые работали и работают над этой темой, но совершенной конструкции «вечного двигателя», пока не создали.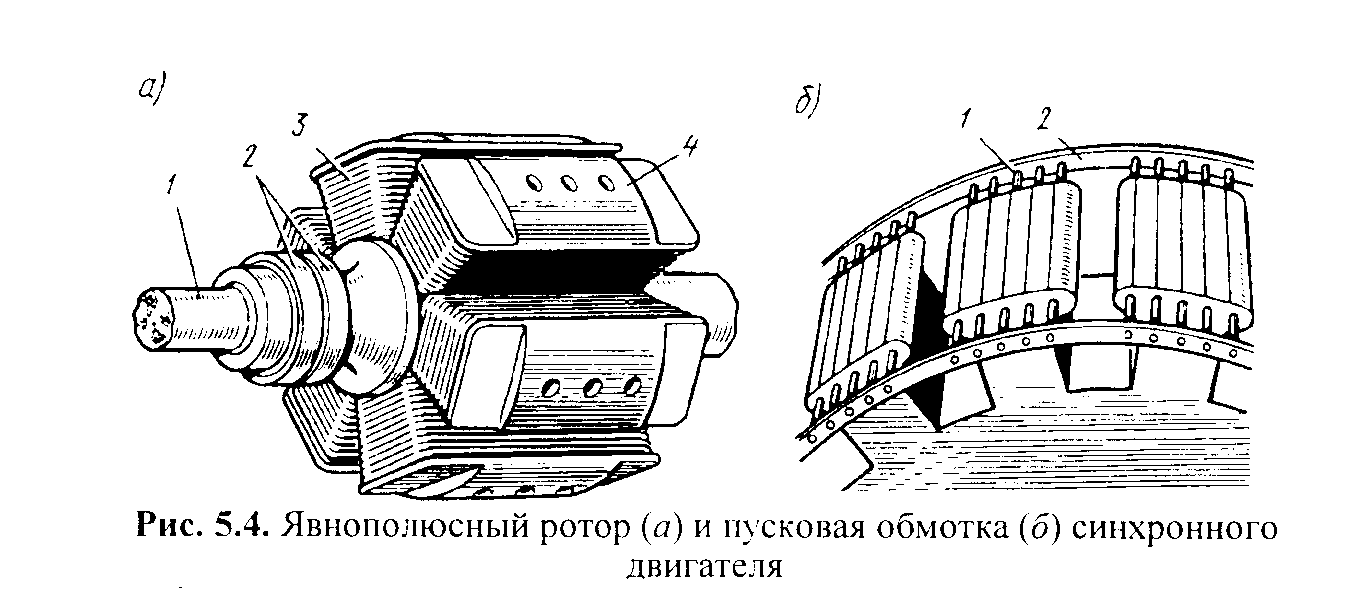 Синхронный двигатель является электрической машиной, работающей в сети переменного тока. Они называются так потому, что частота вращения вала ротора точно соответствует частоте магнитного поля, т.е. вращаются синхронно, индуцируемого статором. Если частота токов статора постоянна, то и ротор вращается со строго постоянной частотой вращения. Электродвигатели по принципу работы бывают синхронными и асинхронными, а по количеству фаз питающего напряжения подразделяются на одно- и трех фазные. Главным их отличием, в не зависимости от фаз является то, что скорость магнитодвижущей силы статора в синхронных двигателях равна скорости вращения ротора, а в асинхронных двигателях эти скорости не совпадают, ротор вращается медленнее магнитного поля статора и не достигает трёх тысяч оборотов в минуту.
Синхронный двигатель является электрической машиной, работающей в сети переменного тока. Они называются так потому, что частота вращения вала ротора точно соответствует частоте магнитного поля, т.е. вращаются синхронно, индуцируемого статором. Если частота токов статора постоянна, то и ротор вращается со строго постоянной частотой вращения. Электродвигатели по принципу работы бывают синхронными и асинхронными, а по количеству фаз питающего напряжения подразделяются на одно- и трех фазные. Главным их отличием, в не зависимости от фаз является то, что скорость магнитодвижущей силы статора в синхронных двигателях равна скорости вращения ротора, а в асинхронных двигателях эти скорости не совпадают, ротор вращается медленнее магнитного поля статора и не достигает трёх тысяч оборотов в минуту.
К отличительным характеристикам синхронного электродвигателя можно отнести:
– работу при высоком значении коэффициента мощности – вплоть до единицы;
– высокий КПД по сравнению с асинхронным устройством той же мощности;
– стабильность частоты вращения не зависит от изменения величины механических нагрузок на валу;
– сохранение нагрузочной способности даже при скачках и асимметрии напряжения в сети питания;
– неизменность частоты вращения независимо от механической нагрузки на валу;
– экономичность.
Области применения синхронных электродвигателей в последнее время расширяются. При появлении преобразователей частоты синхронный двигатель стал использоваться в качестве привода автоматических систем, высокоскоростных приводах станков, металлообрабатывающих центров, роботостроении, погружных насосных агрегатах. Их стали применять также независимо от мощности в тех случаях, когда, требуется постоянство скорости вращения электропривода. В дальнейшем применение синхронных двигателей все больше должно расширяться, даже и для механизмов с регулируемой скоростью вращения и с равномерной нагрузкой.
Наибольшее применение синхронные машины нашли в энергетике, которые могут работать как генераторами, так и электродвигателями. В настоящее время основными источниками электроэнергии остаются синхронные генераторы на тепловых, атомных и гидроэлектростанциях. В зависимости от типа привода синхронные генераторы делятся на турбогенераторы, гидрогенераторы и дизельные генераторы.
Особенность синхронных электродвигателей делает привлекательным его использование в качестве источника реактивной энергии, что позволяет гибко регулировать значение коэффициента мощности и уровня напряжения в сети. Сравнительные расчеты применения синхронных двигателей в качестве компенсирующих устройств показывают, что помимо наименьших капитальных затрат при строительстве в сравнении с другими видами компенсирующих устройств, например статический конденсатор, синхронные двигатели имеют более экономичные эксплуатационные показатели. Поэтому для улучшения «косинус фи» крупных электроустановок на электрических подстанциях устанавливают синхронные двигатели, работающие в режиме холостого хода с опережающим по фазе током. Их называют компенсаторами реактивной мощности.
Сравнительные расчеты применения синхронных двигателей в качестве компенсирующих устройств показывают, что помимо наименьших капитальных затрат при строительстве в сравнении с другими видами компенсирующих устройств, например статический конденсатор, синхронные двигатели имеют более экономичные эксплуатационные показатели. Поэтому для улучшения «косинус фи» крупных электроустановок на электрических подстанциях устанавливают синхронные двигатели, работающие в режиме холостого хода с опережающим по фазе током. Их называют компенсаторами реактивной мощности.
Синхронные двигатели являются незаменимыми в качестве привода в различных механизмах горнорудной, металлургической, металлообрабатывающей промышленности и на строительстве. Синхронные электродвигатели являются самыми мощными, достигающих нескольких десятков мегаватт, и широко применяют для привода мощных воздуходувок доменной печи, угольных и цементных мельниц, компрессорных, насосных и вентиляционных установок, прецизионных обрабатывающих станках, подъёмно-транспортных машинах, конвейерах и прокатных станах, в высокопроизводительных гильотинных ножницах, где имеются большие ударные нагрузки на ротор электродвигателя.
Строгое постоянство частоты вращения обусловливает широкое применение синхронных микродвигателей мощностью от долей ватта до сотен ватт. Они имеют упрощенную конструкцию и применяют для привода автоматических регистрирующих и самопишущих приборов, магнитофонов, печатных машин полиграфии, в системах звука — и видеозаписи и так далее. Синхронный двигатель часто применяется, как микродвигатель в часах, фотоаппаратах и в точном приборостроении.
Большая часть компьютерной техники имеет высокую продуктивность и оснащена синхронными шаговыми электродвигателями, независящими от их мизерных размеров.
Использование синхронных двигателей малой мощности может значительно расширить область применения для привода глубинных насосных установок на нефтяных промыслах, на нефтегазоперерабатывающих заводах и нефтегазоперекачивающих станций магистральных трубопроводов.
В настоящее время в насосном оборудовании, а это скважинные, циркуляционные, повысительные, фекальные и другие насосы, в качестве привода которых, всё больше стали применять синхронные электродвигатели на постоянных магнитах.
Для погружных синхронных электродвигателей с ротором на постоянных магнитах КПД на 13% выше асинхронных электродвигателей с короткозамкнутым ротором. При этом синхронные электродвигатели с постоянными магнитами по сравнению с другими электродвигателями обладают лучшими показателями: мощность/объем, момент/инерция и другие.
Мировой опыт показывает, что повысить энергоэффективность погружных скважинных насосов и процесса подачи воды в современных системах водоснабжения позволяет применение синхронного электродвигателя. У европейского производителя фирмы Franklin Electric появились высокоэффективные системы с погружным электродвигателем на постоянных магнитах для привода скважинных насосов. Исследования компании «Franklin Electric» показывают, что система (насос-электродвигатель) с синхронным приводом до 11% эффективнее по сравнению с аналогичной системой, имеющей асинхронный привод. Данная система получила наивысший класс А по энергоэффективности в Европе.
ОАО «Завод Промбурвод» в свою очередь разработал конструкторскую документацию, провел эксплуатационные испытания на надёжность и поставил на производство синхронный электродвигатель на постоянных магнитах. Данный двигатель со скважинным насосом, системой управления и удаленного мониторинга вошли в состав высокоэффективной системы подачи воды.
Данный двигатель со скважинным насосом, системой управления и удаленного мониторинга вошли в состав высокоэффективной системы подачи воды.
Более подробную информацию о высокоэффективных системах подачи воды, её эффективности и применении можно ознакомиться в научно-практическом пособии «Рекомендации по применению высокоэффективного насосного оборудования для водозаборных скважин» по ссылке на материалы, которые содержат:
– номенклатуру;
– устройство погружных скважинных насосов;
– конструктивные особенности синхронных двигателей на постоянных магнитах;
– сравнительные испытания применяемых скважинных насосов с асинхронными и синхронными электродвигателями;
– экономическую эффективность;
– технико-экономическое обоснование замены применяемых электронасосных агрегатов с асинхронным приводом на высокоэффективные системы подачи воды;
– результаты апробации высокоэффективных систем подачи воды в условиях водозаборов Республики Беларусь.
А. С. Козорез
С. Козорез
Синхронный двигатель — Javatpoint
|
следующий → ← предыдущая Синхронный двигатель — это разновидность двигателя переменного тока. Двигатель переменного тока относится к двигателю, который получает питание переменного тока в качестве входного сигнала и преобразует его во вращательное движение (преобразование электрической энергии в механическую). Основное различие между двигателем переменного и постоянного тока заключается в том, что скорость двигателя постоянного тока контролируется его напряжением, тогда как скорость двигателя переменного тока зависит от частоты питания. Существует два типа двигателей переменного тока.
Синхронные двигатели Синхронный двигатель относится к двигателю переменного тока, который работает с синхронной скоростью. Синхронный двигатель в основном состоит из двух частей: ротора и статора. Ротор синхронного двигателя состоит из катушек с постоянными магнитами, возбуждаемых источником постоянного тока. Когда на статор подается переменный ток, создается вращающееся магнитное поле (RMF). Ротор имеет полюса, имеющие разную полярность. Когда это магнитное поле ротора взаимодействует с ВМП статора из-за разной полярности, ВМП статора и магнитное поле ротора блокируются, поскольку ВМП движется с синхронной скоростью, и ротор начинает вращаться с синхронной скоростью. Поэтому их называют синхронными двигателями или двигателями с постоянной скоростью. Принцип работы синхронного двигателя Синхронный двигатель основан на принципе магнитной блокировки. Запуск синхронного двигателя такой же, как и у асинхронного двигателя, первоначально возбуждаемого трехфазным питанием переменного тока, подаваемым на статор. Трехфазный источник подключен к обмотке якоря, и якорь создает вращающееся магнитное поле, которое вращается с синхронной скоростью 120f/P. Однажды мы возбуждаем постоянные полюса обмотки возбуждения, создаваемые источником постоянного тока, который пытается притянуть противоположные полюса вращающихся магнитных полюсов. Если магнитные полюса притягиваются и блокируются, ротор продолжает вращаться с синхронной скоростью. Где, f = частота и p = количество полюсов Конструкция синхронного двигателяСинхронный двигатель состоит из двух первичных частей; Статор и ротор Статор: Статор — неподвижная часть (неподвижная) синхронной машины. Статор содержит чугунный сердечник, известный как ярмо, обеспечивающее прочность машины. В синхронном двигателе обмотка якоря размещается над статором, который известен как обмотка статора. Ротор:Ротор — вращающаяся часть (подвижная) синхронной машины. Ротор включает в себя обмотку возбуждения, на которую подается постоянный ток через токосъемные кольца. Ротор делится на два типа, известные как явнополюсные и неявнополюсные. В большинстве синхронных двигателей используется конструкция с явно выраженными полюсами. Явнополюсный ротор: Явнополюсный ротор имеет большой диаметр и короткую осевую длину. Воздушный зазор в роторе с явно выраженными полюсами неравномерен, и полюса выступают наружу на поверхность ротора. Полюса ламинированы кремниевой сталью и несут обмотку возбуждения, а поверхности полюсов обычно снабжены прорезями (обеспечивают опору) для обмотки с короткозамкнутым ротором. Неявнополюсный ротор: Конструкция ротора с неявнополюсными полюсами имеет цилиндрическую форму с параллельными пазами для размещения обмоток ротора. Прорези соединены последовательно с токосъемными кольцами, которые возбуждаются от источника постоянного тока. Неявный полюс изготовлен из твердого стального материала. Он имеет очень маленький диаметр и очень большую коаксиальную длину с равномерным воздушным зазором.
Преимущества синхронного двигателя
Недостатки синхронного двигателя
Применение синхронного двигателяВ эпоху цифровых технологий синхронный двигатель нашел широкое применение в повседневной жизни. Наиболее распространенное применение синхронного двигателя — это устройства, требующие постоянной скорости, поскольку частота сети регулируется точно в краткосрочной и долгосрочной перспективе, например, цифровые и аналоговые часы, магнитофоны, проигрыватели грампластинок и т. д. Следующая темаМеханика жидкости MCQ ← предыдущая следующий → |
 Статор — неподвижная часть, а ротор — подвижная часть синхронного двигателя. Синхронный двигатель использует статор, как и асинхронный двигатель, для создания вращающегося магнитного поля (RMF).
Статор — неподвижная часть, а ротор — подвижная часть синхронного двигателя. Синхронный двигатель использует статор, как и асинхронный двигатель, для создания вращающегося магнитного поля (RMF).  Если машина достигла максимальной скорости, составляющей 90% от ее скорости, на ротор подается источник постоянного тока.
Если машина достигла максимальной скорости, составляющей 90% от ее скорости, на ротор подается источник постоянного тока.  Сердечник статора изготовлен из листовой стали, что помогает уменьшить потери на вихревые токи. Вентиляционные каналы отведены в корпус машины, выдерживающий высокую температуру. Обмотка пускателя представляет собой трехфазную обмотку, которая возбуждается трехфазным источником переменного тока.
Сердечник статора изготовлен из листовой стали, что помогает уменьшить потери на вихревые токи. Вентиляционные каналы отведены в корпус машины, выдерживающий высокую температуру. Обмотка пускателя представляет собой трехфазную обмотку, которая возбуждается трехфазным источником переменного тока.  Стержни демпфера закорочены с обоих концов медными кольцами. Работа демпферной обмотки в первую очередь обеспечивает пусковой момент и ограничивает колебание (нежелательный шум и вибрацию машины) в синхронном двигателе.
Стержни демпфера закорочены с обоих концов медными кольцами. Работа демпферной обмотки в первую очередь обеспечивает пусковой момент и ограничивает колебание (нежелательный шум и вибрацию машины) в синхронном двигателе.  Это относится к двигателю переменного тока, в котором скорость вращения ротора меньше синхронной.
Это относится к двигателю переменного тока, в котором скорость вращения ротора меньше синхронной. 
Испытания синхронных двигателей с использованием технологии MCA, часть 1
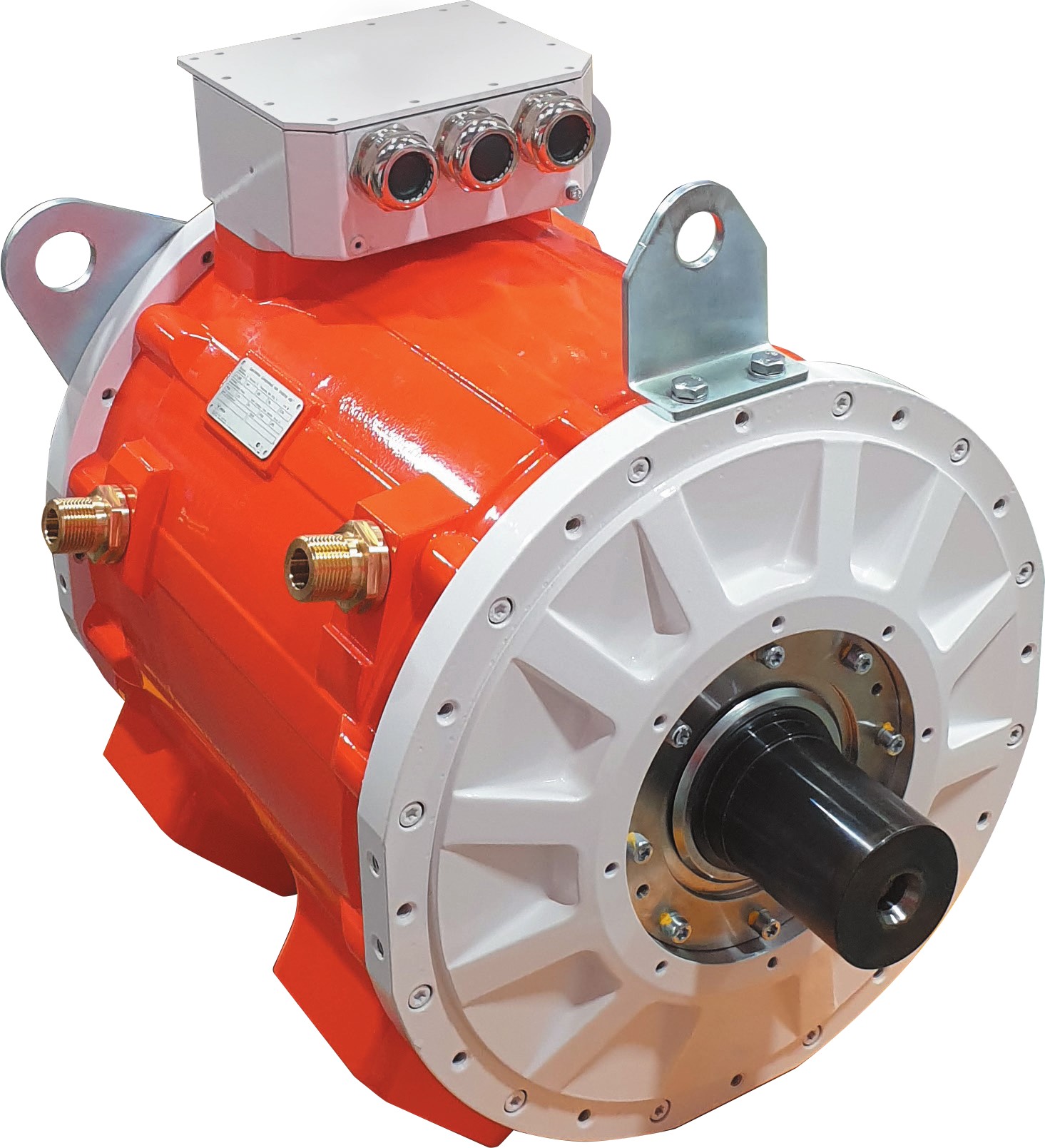
ИЗОБРАЖЕНИЕ 1 (вверху слева): синхронный двигатель с постоянными магнитами (изображения предоставлены All-Test Pro). ИЗОБРАЖЕНИЕ 2 (вверху справа): Синхронный двигатель с независимым возбуждением
В июньском номере журнала Pumps & Systems за 2022 г.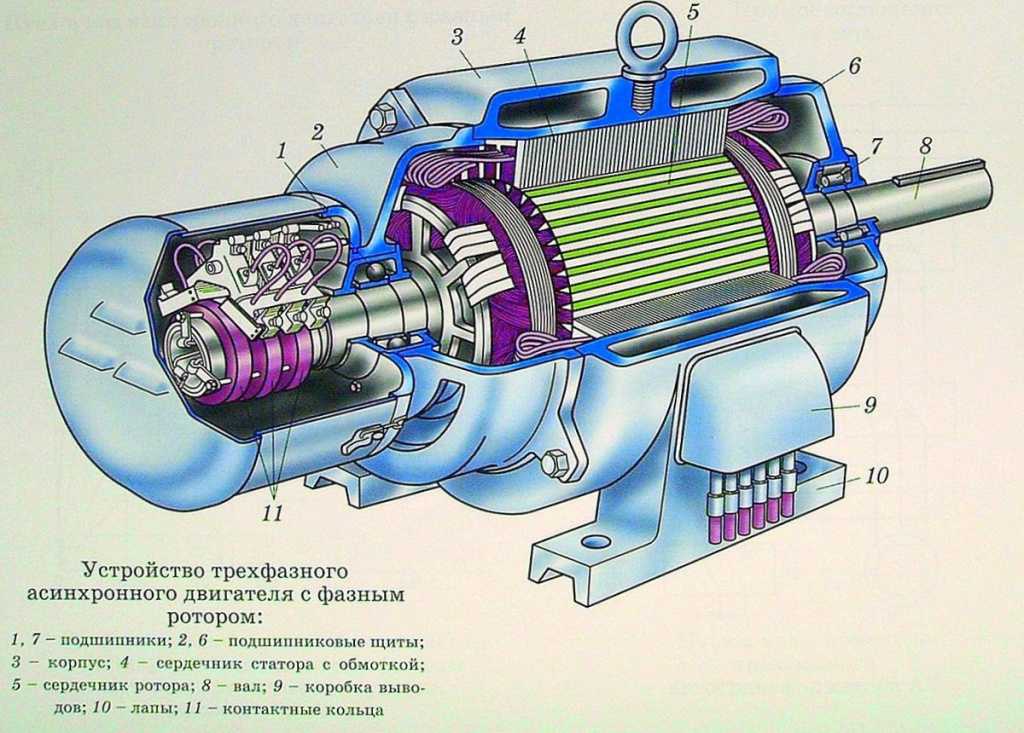 была опубликована статья под названием «Преимущества синхронных двигателей», в которой обсуждается ожидаемый рост использования синхронных двигателей на рынке насосов. Эта статья является первой в серии из двух частей и содержит краткий обзор конструкции и работы синхронных двигателей, распространенных неисправностей и способов использования синхронных двигателей для регулирования коэффициента мощности электрических систем предприятия.
была опубликована статья под названием «Преимущества синхронных двигателей», в которой обсуждается ожидаемый рост использования синхронных двигателей на рынке насосов. Эта статья является первой в серии из двух частей и содержит краткий обзор конструкции и работы синхронных двигателей, распространенных неисправностей и способов использования синхронных двигателей для регулирования коэффициента мощности электрических систем предприятия.
Во второй части будет обсуждаться, как можно использовать анализ цепи двигателя для оценки текущего состояния этих двигателей, а также легко и быстро выявлять любые возникающие проблемы, прежде чем они станут проблематичными.
Преимущества синхронных двигателей в насосных установках
Синхронные двигатели обычно используются, когда требуется работа с постоянной скоростью; однако для насосных установок они в основном используются по финансовым соображениям, например:
1 — Операции с более высокой эффективностью, чем обычно выполняются асинхронными двигателями, что приводит к снижению затрат на электроэнергию.
2 — Способность улучшать коэффициенты мощности системы, чтобы помочь уменьшить любые надбавки за коэффициент мощности (PF), налагаемые поставщиком энергии. Это позволяет одному двигателю обеспечить требуемый расход от насоса, а также улучшить коэффициент мощности установки.
Коррекция коэффициента мощности
Коэффициент мощности определяется как отношение фактической мощности (Вт) к полной мощности (вольт-ампер). Основная проблема заключается в том, что станции, которые обычно платят за реальную мощность, используют киловатт-часы (кВт-ч). Разница между реальной мощностью и полной мощностью составляет реактивную мощность. Чтобы быстро просмотреть:
Истинная мощность (Ватт) — мощность, производящая полезную работу, передаваемая в нагрузку и измеряемая в ваттах.
Реактивная мощность (ВАр) — это мощность, необходимая для создания магнитных полей в двигателях, трансформаторах или любой катушке в электрической системе. Эта мощность хранится в виде энергии магнитного поля и заставляет ток отставать от напряжения.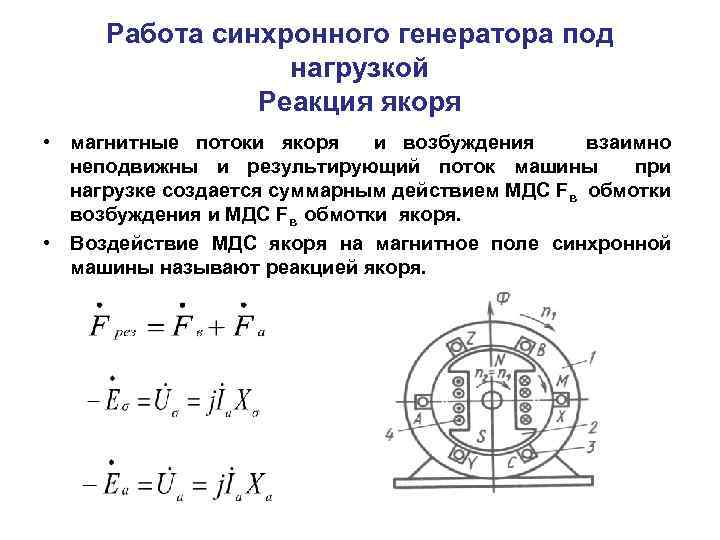 Любая емкость в цепи также будет накапливать энергию и заставлять напряжение отставать от тока. Если в системе больше индуктивной нагрузки, то коэффициент мощности отстает. Если в системе больше емкостная нагрузка, то PF будет ведущим. Единицами измерения реактивной нагрузки являются реактивные вольт-амперы.
Любая емкость в цепи также будет накапливать энергию и заставлять напряжение отставать от тока. Если в системе больше индуктивной нагрузки, то коэффициент мощности отстает. Если в системе больше емкостная нагрузка, то PF будет ведущим. Единицами измерения реактивной нагрузки являются реактивные вольт-амперы.
Полная мощность (ВА) — это общая мощность, подаваемая в систему от источника. Это подаваемое напряжение, умноженное на весь ток в системе.
Коэффициент мощности (PF) представляет собой отношение фактической мощности, используемой в системе, к полной мощности, подаваемой источником, и измеряется в процентах. PF = (истинная мощность/полная мощность) 100
Коммунальное предприятие должно снабжать электростанцию полной мощностью, но взимать плату только за фактическую используемую мощность. В идеале коммунальное предприятие хотело бы взимать с пользователя плату за всю поставляемую мощность, но станции с низкими коэффициентами требуют от поставщика поддерживать достаточную мощность для обеспечения требуемой полной мощности, но могут взимать плату только за фактическую мощность. Таким образом, когда установка работает с коэффициентом мощности, близким к единице (истинная мощность = кажущаяся мощность), поставщик взимает плату за общую поставляемую мощность. На станциях, работающих с низким коэффициентом мощности, поставщик не взимает плату за необходимую дополнительную мощность, поэтому он добавляет надбавку за коэффициент мощности.
Таким образом, когда установка работает с коэффициентом мощности, близким к единице (истинная мощность = кажущаяся мощность), поставщик взимает плату за общую поставляемую мощность. На станциях, работающих с низким коэффициентом мощности, поставщик не взимает плату за необходимую дополнительную мощность, поэтому он добавляет надбавку за коэффициент мощности.
Большинство промышленных предприятий имеют большое количество индуктивных нагрузок, что означает, что они будут иметь отстающий коэффициент мощности. Синхронные двигатели могут использоваться для перемещения PF от отстающего PF путем перевозбуждения катушек возбуждения ротора.
Основные типы и конструкция синхронных двигателей
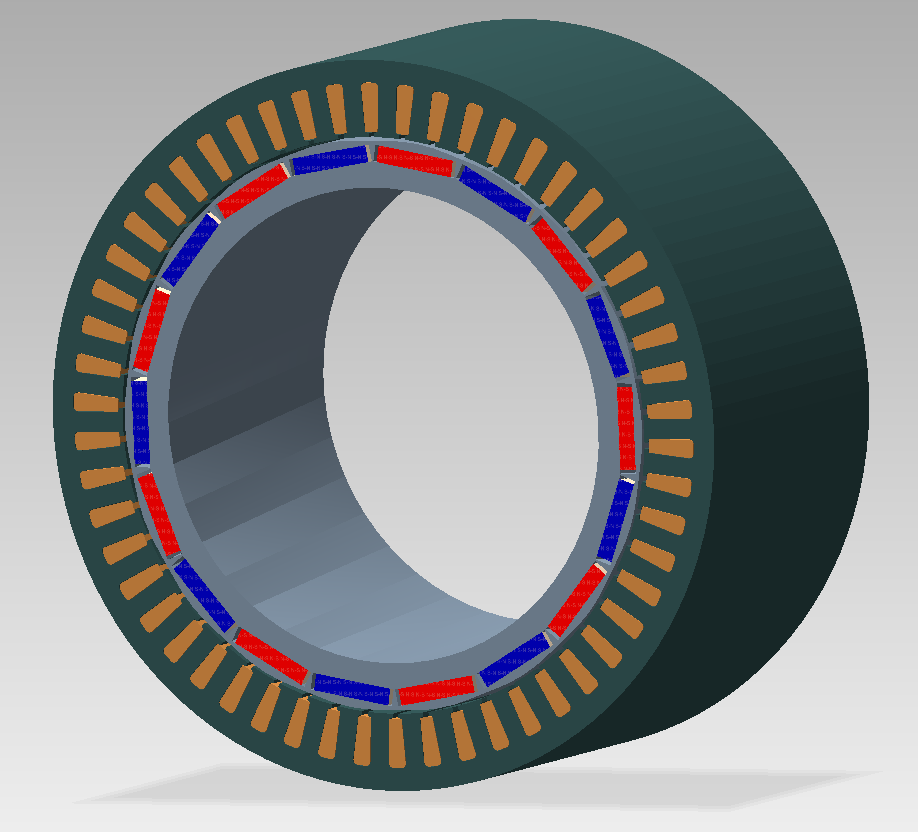
Поскольку синхронные двигатели вращаются с той же скоростью, что и вращающееся магнитное поле, необходимо наличие магнитного поля на роторе. Типы синхронных двигателей:
1 — Синхронный двигатель без возбуждения : наиболее распространенными из них являются синхронные двигатели с постоянными магнитами, в которых на роторе установлены постоянные магниты для создания вращающегося магнитного поля.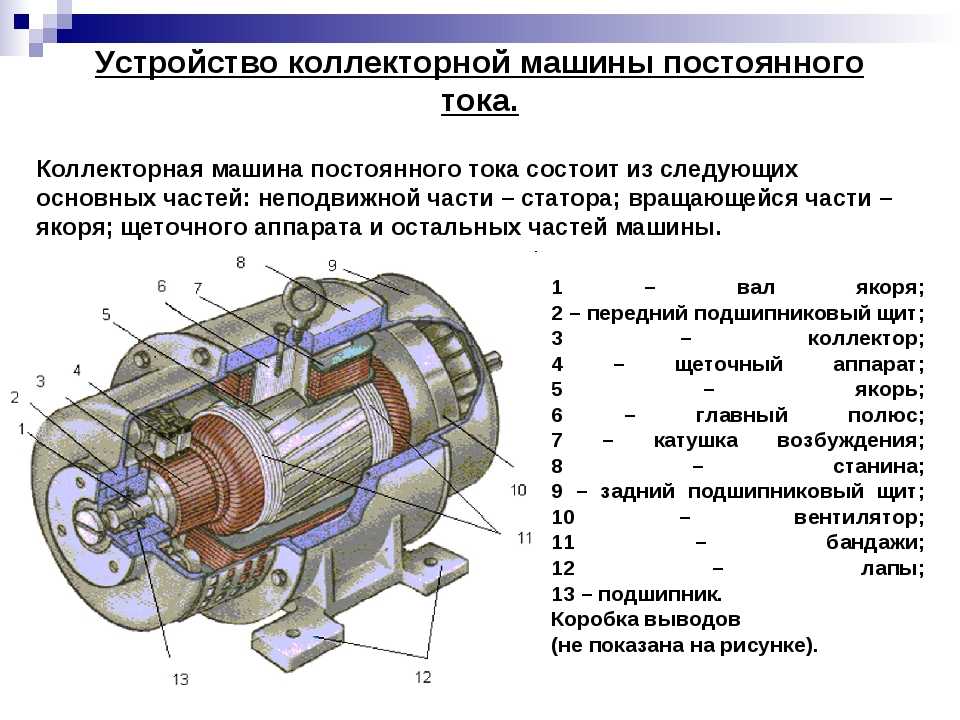
2 — Синхронный двигатель с независимым возбуждением : они имеют ряд катушек возбуждения, намотанных вокруг полюсов возбуждения ротора, и требуют напряжения постоянного тока (DC) для создания магнитного поля на роторе. Эти двигатели можно дополнительно разделить на щеточные и бесщеточные возбудители.
Базовая конструкция синхронных двигателей
Базовая конструкция статора такая же, как у любого трехфазного двигателя переменного тока. Есть три набора фазных обмоток, как у стандартного трехфазного асинхронного двигателя. Эти катушки точно размещаются в пазах статора для создания трехфазных обмоток, каждая фаза имеет четное число полюсов (P).
Подача трехфазного переменного тока непосредственно на фазные обмотки создает магнитное поле, которое вращается с постоянной скоростью вокруг сердечника статора. Это называется синхронной скоростью (СС). SS зависит от количества полюсов и применяемой частоты.
Основное различие между асинхронным двигателем и синхронным двигателем заключается в роторе. Ротор размещен внутри сердечника статора и установлен на подшипниках для позиционирования ротора в геометрическом центре сердечника статора, что позволяет ротору свободно вращаться.
Ротор размещен внутри сердечника статора и установлен на подшипниках для позиционирования ротора в геометрическом центре сердечника статора, что позволяет ротору свободно вращаться.
Постоянные магниты или полюса поля создают вращающееся магнитное поле, которое взаимодействует с магнитным полем, вращающимся вокруг статора. Взаимодействие между двумя магнитными полями преобразует электрическую энергию в механический крутящий момент.
Роторы с независимым возбуждением можно разделить на бесщеточные или щеточные синхронные двигатели. Бесщеточные типы обычно имеют вращающийся генератор переменного тока, установленный на валу двигателя. Эти генераторы переменного тока имеют катушки якоря, установленные на валу, поле которого питается от катушек на статоре. Генерируемая выходная мощность переменного тока затем выпрямляется для обеспечения необходимого возбуждения поля постоянным током (DC) для катушек возбуждения двигателей.
Синхронный двигатель щеточного типа подает напряжение постоянного тока через щетки, установленные на токосъемных кольцах, на катушки возбуждения, установленные на полюсах возбуждения, для создания магнитных полей ротора. Катушки возбуждения, которые создают магнитные поля на полюсах ротора, соединены последовательно, причем соседние полюса имеют противоположную полярность, как показано на Рисунке 2.
Катушки возбуждения, которые создают магнитные поля на полюсах ротора, соединены последовательно, причем соседние полюса имеют противоположную полярность, как показано на Рисунке 2.
Недостатком синхронных двигателей является недостаточный крутящий момент во время пуска для вращения ротора с приложенной нагрузкой. Во время запуска переменного тока синхронный двигатель реагирует так же, как асинхронный двигатель переменного тока. Он основан на специальной схеме, созданной амортизирующими обмотками для создания магнитного поля на роторе.
ИЗОБРАЖЕНИЕ 3: Обмотки трехфазного статора
Амортизирующие обмотки представляют собой проводники, встроенные в полюса возбуждения, которые действуют как проводники во время пускового цикла. Амортизирующие обмотки соединены на каждом конце, чтобы создать электрическую цепь, подобную той, которая используется в асинхронных двигателях с короткозамкнутым ротором.
Пусковой ток основан на законе взаимной индуктивности Фарадея для создания такого же высокого пускового тока, как и в асинхронных двигателях. Это позволяет скорости вращения вала догнать вращающееся магнитное поле. Когда ротор приближается к синхронной скорости, поле постоянного тока подается на катушки возбуждения ротора, позволяя полюсам ротора замыкаться на вращающемся магнитном поле.
Это позволяет скорости вращения вала догнать вращающееся магнитное поле. Когда ротор приближается к синхронной скорости, поле постоянного тока подается на катушки возбуждения ротора, позволяя полюсам ротора замыкаться на вращающемся магнитном поле.
Неисправности синхронных двигателей
Как и в случае с большинством двигателей, подшипники, как правило, являются основной причиной отказа синхронного двигателя, за которым следуют короткие замыкания обмотки обмотки ротора и статора. Кроме того, амортизирующие обмотки могут треснуть так же, как при выходе из строя стержней ротора в асинхронных двигателях.
Идентификация этих неисправностей с помощью традиционных электрических испытательных устройств и инструментов, обычно используемых в промышленности, имеет ограничения и недостатки, присущие асинхронным двигателям с короткозамкнутым ротором. Однако в связи с их конструкцией и работой требуются дополнительные приемы и методы испытаний.
Методы анализа вибрации машин усовершенствуют обнаружение и выявление неисправностей подшипников качения, и тот же анализ цепей двигателя (MCA), который аналогичным образом усовершенствует обнаружение и анализ асинхронных двигателей, может быть применен к синхронным двигателям
MCA эффективен при обнаружении и идентификации неисправностей асинхронных двигателей.
