Как работает детектор нуля на оптопаре. Какие компоненты нужны для его сборки. Для чего применяется детектор нуля в электронных схемах. Какие преимущества дает использование оптопары в детекторе нуля.
Принцип работы детектора нуля на оптопаре
Детектор нуля (или нуль-детектор) — это электронная схема, которая определяет момент перехода переменного напряжения через нулевое значение. Детектор нуля на оптопаре работает следующим образом:
- Входное переменное напряжение подается на светодиод оптопары через токоограничивающий резистор
- Когда напряжение близко к нулю, светодиод не светится и фототранзистор оптопары закрыт
- При увеличении напряжения светодиод начинает светиться и открывает фототранзистор
- На выходе фототранзистора формируется импульс в момент перехода входного напряжения через ноль
Таким образом, оптопара преобразует синусоидальное напряжение в последовательность прямоугольных импульсов, соответствующих моментам перехода через ноль.
Компоненты детектора нуля на оптопаре
Для сборки простейшего детектора нуля на оптопаре потребуются следующие компоненты:
- Оптопара (например, PC817 или аналог)
- Токоограничивающий резистор для светодиода оптопары (1-10 кОм)
- Нагрузочный резистор для фототранзистора (1-10 кОм)
- Диодный мост для выпрямления входного напряжения (необязательно)
Выбор номиналов резисторов зависит от параметров конкретной оптопары и входного напряжения. Диодный мост позволяет детектору работать с обеими полуволнами переменного напряжения.
Применение детектора нуля в электронных схемах
Детектор нуля широко используется в различных электронных устройствах для синхронизации с сетевым напряжением. Основные области применения:
- Регуляторы мощности на симисторах и тиристорах
- Импульсные источники питания
- Системы управления электродвигателями
- Измерительные приборы
- Цифровые таймеры и часы
Детектор нуля позволяет точно определить моменты перехода напряжения через ноль и синхронизировать работу устройства с сетевой частотой.
Преимущества использования оптопары в детекторе нуля
Применение оптопары в схеме детектора нуля дает ряд важных преимуществ:
- Гальваническая развязка входных и выходных цепей
- Высокая помехозащищенность
- Простота схемы
- Широкий диапазон рабочих напряжений
- Высокое быстродействие
Благодаря этим преимуществам детектор нуля на оптопаре обеспечивает надежную и безопасную работу в различных применениях.
Схема детектора нуля на оптопаре
Рассмотрим типовую схему простого детектора нуля на оптопаре:
«` «`В данной схеме:
- R1 — токоограничивающий резистор для светодиода оптопары (обычно 1-10 кОм)
- Оптопара — например, PC817 или аналогичная
- R2 — нагрузочный резистор фототранзистора (обычно 1-10 кОм)
Входное переменное напряжение подается на светодиод оптопары через резистор R1. Выходной сигнал снимается с коллектора фототранзистора. При прохождении входного напряжения через ноль на выходе формируется импульс.
Настройка и оптимизация детектора нуля
Для оптимальной работы детектора нуля на оптопаре важно правильно подобрать компоненты и настроить схему:
- Выбор оптопары с подходящими характеристиками (быстродействие, CTR)
- Расчет токоограничивающего резистора R1 для оптимального тока светодиода
- Подбор нагрузочного резистора R2 для четкого переключения фототранзистора
- Установка порога срабатывания с помощью дополнительных компонентов
- Применение фильтрации для подавления помех и дребезга
Правильная настройка позволяет получить стабильную работу детектора в широком диапазоне входных напряжений.
Применение детектора нуля с микроконтроллерами
Детектор нуля на оптопаре часто используется совместно с микроконтроллерами для реализации различных устройств. Основные аспекты такого применения:
- Подключение выхода детектора к входу прерывания микроконтроллера
- Программная обработка импульсов детектора нуля
- Синхронизация работы микроконтроллера с сетевой частотой
- Реализация регуляторов мощности и других устройств на основе детектора нуля
Микроконтроллер позволяет гибко управлять работой устройства в зависимости от сигналов детектора нуля.
Альтернативные схемы детекторов нуля
Кроме схемы на оптопаре, существуют и другие варианты реализации детектора нуля:
- На компараторе
- На операционном усилителе
- На специализированных микросхемах
- На трансформаторе
Каждый вариант имеет свои преимущества и недостатки. Выбор конкретной схемы зависит от требований к устройству и условий применения.
Использование оптотиристоров MOC30xx — 12 Февраля 2016
Эти радиоэлементы особенно незаменимы при управлении более мощными симисторами, например при реализации реле высокого напряжения или большей мощности. Подобные оптопары были задуманы для осуществления связи между логическими элементами с малым уровнем напряжения (например, вентиль TTL) и нагрузкой, питаемой сетевым напряжением (110 или 220 вольт).
Оптосимистор может размещаться в малогабаритном DIP-корпусе с шестью выводами.
Внутренняя структура оптосимисторов.
Ниже приведена таблица, все выбранные оптроны отличаются минимальным гарантированием током управления и максимальным рабочим напряжением.
| Ift | Тип | Тип | Тип | Тип | Тип | Тип |
| 20 | MOC3010 | MOC3021 | MOC3031 | MOC3041 | MOC3061 | MOC3081 |
| 10 | MOC3011 | MOC3012 | MOC3032 | MOC3042 | MOC3062 | MOC3082 |
| 05 | MOC3012 | MOC3013 | MOC3043 | MOC3063 | MOC3083 | |
| Напряжение питания | 110/120 В | 220/240 В | 110/120 В | 220/240 В | 220/240 В | 220/240 В |
| Обнаружение нуля | НЕТ | НЕТ | ДА | ДА | ДА | ДА |
| Vdrm | 250 В | 400 В | 250 В | 400 В | 600 В | 800 В |
В таблице приведена классификация оптосимисторов по величине прямого тока, через светодиод IFT, открывающего прибор, и максимального прямого повторяющегося напряжения, выдерживаемого симистором на выходе ( VDRM). В таблице отмечено также и свойство симистора открываться при переходе через нуль напряжения питания. Для снижения помех предпочтительнее использовать симисторы, открывающиеся при переходе через нуль напряжения питания.
В таблице отмечено также и свойство симистора открываться при переходе через нуль напряжения питания. Для снижения помех предпочтительнее использовать симисторы, открывающиеся при переходе через нуль напряжения питания.
Что касается элементов с обнаружением нуля напряжения питания, то их выходной каскад срабатывает при превышении напряжением питания некоторого порога, обычно это 5 В (максимум 20 В). Серии МОС301х и МОС302х чаще используются с резистивной нагрузкой или в случаях, когда напряжение питания нагрузки должно отключаться. Когда симистор находится в проводящем состоянии, максимальное падение напряжения на его выводах обычно равно 1,8В (максимум 3В) при токе до 100мА. Ток удержания (IH), поддерживающий проводимость выходного каскада оптосимистора, равен 100мкА, каким бы он ни был (отрицательным или положительным) за полупериод питающего напряжения.
Ток утечки выходного каскада в закрытом состоянии (ID) варьируется в зависимости от модели оптосимистора. Для оптосимисторов с обнаружением нуля ток утечки может достигать 0,5мА, если светодиод находится под напряжением (протекает ток IF).
У инфракрасного светодиода обратный ток утечки равен 0,05 мкА (максимум 100 мкА), и максимальное падение прямого напряжения 1,5В для всех моделей оптосимисторов. Максимально допустимое обратное напряжение светодиода 3 вольта для моделей МОС301х, МОС302х и МОС303х и 6 вольт для моделей МОС304х. МОСЗО6х и МОСЗО8х.
Предельно допустимые характеристики
Максимально допустимый ток через светодиод в непрерывном режиме — не более 60ма.
Максимальный импульсный ток в проводящем состоянии переключателя выходного каскада — не более 1 А.
Полная рассеиваемая мощность оптосимистора не должна превышать 250 мВт (максимум 120 мВт для светодиода и 150 мВт для выходного каскада при Т — 25˚С).
Типовая схема подключения:
Даташит MOC301x и MOC304x
Сопротивление Rd
Расчет сопротивления этого резистора зависит от минимального прямого тока инфракрасного светодиода, гарантирующего отпирание симистора. Следовательно, Rd = (+V — 1,5) / IF.
Например, для схемы транзисторного управления оптосимистором c напряжением питания +5 В и напряжением на открытом транзисторе (Uкэ нас), равном 0.3 В, +V будет 4,7 В, и IF должен находиться в диапазоне между 15 и 50 ма для МОС3041. Следует принять IF — 20 мА с учетом снижения эффективности светодиода в течение срока службы (запас 5 мА), целиком обеспечивая работу оптопары с постепенным ослаблением силы тока. Таким образом, имеем:
Rв = (4,7 — 1,5) / 0,02 = 160 Ом.
Следует подобрать стандартное значение сопротивления, то есть 150 Ом для МОС3041 и сопротивление 100 Ом для МОС3020.
Для того чтобы переключение симистора происходило быстро, должно быть выполнено следующее условие: dV / dt = 311 / Ra х Ca.
Для МОС3020 максимальное значение dV / dt — 10 В/мкс.
Таким образом: Сa = 311 / (470 х 107) = 66 нФ.
Выбираем: Сa = 68 нФ.
Расчет сопротивления R.
Это сопротивление если работа идет на чисто активную нагрузку можно даже не ставить, но это только для лабораторных условий. Поэтому для надежной работы объясню как его рассчитать и его назначение.
Управляющий электрод оптосимистора может выдержать определенный максимальный ток. Превышение этого тока вызовет повреждение оптрона. Нам необходимо рассчитать сопротивление, чтобы при максимальном рабочем напряжении сети (например, 220 В) ток не превышал максимально допустимый.
Для выше указанных оптопар максимальной допустимый ток 1 А.
Минимальное сопротивление резистора R:
Rmin=220 В * 1,44 / 1 А = 311 Ом.
С другой стороны слишком большое сопротивление может привести к нарушению работы схемы (будет перебои с включением силового симистора).
Поэтому принимаем сопротивление из стандартного ряда R=330 или 390 Ом.
Расчет сопротивления Rg.
Резистор Rg необходим, только в случаи высокочуствительного управляющего электрода симистора. И обычно может составлять от 100 Ом до 5 кОм. Я рекомендую ставить 1 кОм.
Защита
Настоятельно рекомендуется защищать симистор и оптосимистор при работе на индуктивную нагрузку или при часто воздействующих на сеть помехах.
Для симистора искрогасящая RC-цепочка просто необходима. Для оптосимистора с обнаружением нуля, такой как МОС3041, — желательна. Сопротивление резистора R следует увеличить с 27 Ом до 330 Ом (за исключением случая, когда управляемый симистор малочувствительный).
Если используется модель без обнаружения нуля, то snubber-цепочка Ra — Сa обязательна.
Фазное регулирование нагрузки переменного тока с помощью FLProg / Хабр
Выдался свободный денёк и я решил наконец то опробовать блок скоростного счетчика в режиме линии задержки. Этот режим создавался в основном для реализации фазного регулирования нагрузки, но до сих пор я не успевал его обкатать в реальном применении. Думаю уже пора.
Обвязку блока я сделал по этой схеме:
На оптопаре PC814 собран детектор нуля. Поскольку блок работает на прерываниях, то входом детектора нуля могут служить только входы контроллера к которым привязываются аппаратные прерывания. В случае UNO это входы D2 и D3.
На оптосимисторе MOC3023 собран блок управления симистором. Для управления этим блоком можно выбрать любой свободный цифровой выход контроллера.
Схема проекта
Res — Аналоговый вход. На входе стоит переменный резистор.
Блок SCT2 — Блок скоростного счетчика. (Библиотека элементов -> Счетчики -> SpeedCounter)
Поскольку все оптопары отличаются — необходимо произвести настройку блока Scalе. Для этого на время модернизируем проект.
Теперь значение задержки раз в секунду будет выводится в Ком-порт. Для чего это нужно? Поскольку передний фронт импульса с детектора нуля приходит немного раньше истинного момента перехода синусоиды через 0 (в момент потухания светодиода оптопары), то нам необходимо определить это время для задания его в качестве 100% значения мощности на нагрузке. Вот настроечные параметры для блока Scale.
Зальем программу в контроллер и запустим монитор компорта. При вращении переменного резистора лампа будет либо гореть либо мерцать.Вот как это выглядит.
Добиваемся равномерного максимального горения. Значение полученное через компорт записываем. Это значение будем заносить в поле «Нижний предел выходного значения» Scale. Теперь отстроим вторую границу. Опять поменяем значения в блоке Scale
Длительность полупериода сетевого напряжения составляет 10000 микросекунд. Но у нас импульс сдвинут 1102 микросекунды раньше. Соответственно что бы установить полный ноль мощности необходимо максимальную задержку увеличить на столько-же. Можно конечно просто выставить 11102, но лучше проверить. Зальем программу в контроллер и запустим монитор компорта. Добиваемся момента перехода с мерцающего горения в полное потухание. Значение из компорта записываем. Вот как это выглядит.
Ну и тетерь можно использовать полученные значения. Заполняем блок Scale
Ну вот что получилось
Теперь можно убирать блоки генератора и передачи данных компорта, а на вход Scale подавать необходимое Вам регулирующее значение. Обратите внимание в поле «Верхний предел входного значения» блока Scale необходимо занести значение регулирующей величины соответствующее 0 мощности на нагрузке, а в поле «Нижний предел входного значения» значение соответствующее 100% мощности.
Твердотельного реле на симисторе и оптопаре с симисторным выходом для управления нагрузкой в цепи переменного тока
В рассматриваемых ранее схемах реле в качестве нагрузки я использовал светодиод. Для включения более мощных нагрузок можно использовать механическое реле, но я предпочитаю использовать твердотельное реле на симисторной оптопаре и симисторе. В твердотельном реле, в отличие от механического, нет движущихся частей, поэтому оно имеет больший срок службы. Недостатком является нагрев симистора и как следствие необходимость радиатора. Расчет радиатора достаточно сложен, проще подобрать его экспериментально, начиная с самого большого и уменьшать, до тех пор пока не будет достигнут компромисс между размером радиатора и температурой симистора. Проверять температуру лучше не пальцем, так как далеко не все симисторы имеют изолированный от выводов корпус и на радиаторе может оказаться фаза. Перед тем как потрогать радиатор нужно обесточить схему.
Когда на светодиод подается питание, внутри оптопары открывается симистор, который управляет более мощным симистором. Резистор R2 ограничивает ток через симистор оптопары в начальный момент, когда внешний симистор еще не открылся. Резистор R3 нужен для более быстрого закрытия симистора и чтобы управляющий электрод не висел в воздухе при закрытом симисторе оптопары. Его можно и не ставить. Цепь R3 C1 является снаббером. Снаббер рекомендуется ставить для защиты от самопроизвольного включения симистора в отсутствие управляющего сигнала, особенно если нагрузка индуктивная. Он ограничивает скорость нарастания напряжения dV/dt. Чем больше емкость и чем меньше сопротивление, тем сильнее ограничивается скорость нарастания напряжения, но возрастает вероятность повреждения симистора из-за разряда конденсатора. Обычно используют резистор не менее 100 Ом и конденсатор 100нФ.
Существуют и безснабберные симисторы(snubberless), называемые также трехквадрантными(3Q или Hi-com), например BTA16-600BW. Они разработаны специально для работы с индуктивной нагрузкой и снабберная цепь в большинстве случаев не нужна.
Проверка оптопары moc3063 мультиметром в режиме прозвонки. Сначала проверяется светодиод. К выводу 1 подключаем красный щуп, а к выводу 2 черный. Мультиметр покажет падение на светодиоде чуть более 1В. Такое низкое падение напряжения характерно для инфракрасных светодиодов. Теперь щупы мультиметра подключим к выводам 4 и 6, а на светодиод подадим питание 5-12В через резистор 1кОм. После подачи питания мультиметр должен показать падение напряжения на открывшемся симисторе около 1В. Если теперь убрать питание светодиода симистор останется в открытом состоянии, так как через него протекает ток от мультиметра. Чтобы он закрылся нужно на короткое время прервать ток в цепи. В цепях переменного тока закрытие симистора происходит автоматически в момент когда ток меняет направление.
Проверка симистора мультиметром в режиме прозвонки на примере BTA16-600BW. К первому выводу подключаем черный щуп, ко второму — красный. Теперь на управляющий электрод подаем питание 5-12В через резистор 100 Ом: минус соединяем к первому выводу, а плюс к третьему. Симистор откроется, мультиметр покажет падение напряжения около 0,8В. Если убрать питание с управляющего электрода симистор закроется, так как мультиметр не может выдать 50мА тока, необходимого для удержания BTA16-600BW в открытом состоянии.
Оптопара moc3063 имеет внутри детектор перехода напряжения через ноль. При поступлении питания на светодиод нагрузка будет включена не моментально, а при ближайшем переходе напряжения через ноль. Этим достигается минимизации помех при переключении. В схемах фазоимпульсной регулировки мощности оптопара с детектором перехода через ноль работать не будет. В таких схемах нужно применять оптопары без детектора нуля, например moc3052.
Я подумал что если нагрузка маломощная, можно не использовать внешний симистор, должно хватить встроенного. Максимальная рассеиваемая мощность встроенного симистора 150мВт, максимальное падение напряжения на симисторе 3В. Чтобы не превысить рассеиваемую мощность, ток нагрузки не должен превышать 50мА. Можно управлять маленькой светодиодной лампой на 10Вт, ток потребления которой 54мА. Прогорела у меня такая лампа через оптосимистор около часа, а потом я отключил ее и снова включил, при включенном питании светодиода. Лампа моргнула, а симистор в оптопаре больше не открывался. Полагаю он сгорел из-за броска тока через лампу в момент включения. Остались у меня две оптопары, они понадобятся для управления освещением и нагревом в теплице, поэтому решил больше не экспериментировать и впредь применять оптопару только с внешним симистором.
Фазное регулирование нагрузки переменного тока с помощью FLProg – FLProg
Выдался свободный денёк и я решил наконец то опробовать блок скоростного счетчика в режиме линии задержки. Этот режим создавался в основном для реализации фазного регулирования нагрузки, но до сих пор я не успевал его обкатать в реальном применении. Думаю уже пора.
Обвязку блока я сделал по этой схеме:
На оптопаре PC814 собран детектор нуля. Поскольку блок работает на прерываниях, то входом детектора нуля могут служить только входы контроллера к которым привязываются аппаратные прерывания. В случае UNO это входы D2 и D3.
На оптосимисторе MOC3023 собран блок управления симистором. Для управления этим блоком можно выбрать любой свободный цифровой выход контроллера.
Схема проекта
Res – Аналоговый вход. На входе стоит переменный резистор.
Блок SCT2 – Блок скоростного счетчика. (Библиотека элементов -> Счетчики -> SpeedCounter)
Настройки блока:
Поскольку все оптопары отличаются – необходимо произвести настройку блока Scalе. Для этого на время модернизируем проект.
Теперь значение задержки раз в секунду будет выводится в Ком-порт. Для чего это нужно? Поскольку передний фронт импульса с детектора нуля приходит немного раньше истинного момента перехода синусоиды через 0 (в момент потухания светодиода оптопары), то нам необходимо определить это время для задания его в качестве 100% значения мощности на нагрузке. Вот настроечные параметры для блока Scale.
Зальем программу в контроллер и запустим монитор компорта. При вращении переменного резистора лампа будет либо гореть либо мерцать.Вот как это выглядит.
Добиваемся равномерного максимального горения. Значение полученное через компорт записываем. Это значение будем заносить в поле “Нижний предел выходного значения” Scale. Теперь отстроим вторую границу. Опять поменяем значения в блоке Scale
Длительность полупериода сетевого напряжения составляет 10000 микросекунд. Но у нас импульс сдвинут 1102 микросекунды раньше. Соответственно что бы установить полный ноль мощности необходимо максимальную задержку увеличить на столько-же. Можно конечно просто выставить 11102, но лучше проверить. Зальем программу в контроллер и запустим монитор компорта. Добиваемся момента перехода с мерцающего горения в полное потухание. Значение из компорта записываем. Вот как это выглядит.
Ну и тетерь можно использовать полученные значения. Заполняем блок Scale
Ну вот что получилось
Теперь можно убирать блоки генератора и передачи данных компорта, а на вход Scale подавать необходимое Вам регулирующее значение. Обратите внимание в поле “Верхний предел входного значения” блока Scale необходимо занести значение регулирующей величины соответствующее 0 мощности на нагрузке, а в поле “Нижний предел входного значения” значение соответствующее 100% мощности.
Добавил: support
Publication author
63 Comments: 26Publics: 76Registration: 21-12-2017Способы и схемы управления тиристором или симистором — АльфаМастер
Тиристоры нашли широкое применение в полупроводниковых устройствах и преобразователях. Различные источники питания, частотные преобразователи, регуляторы, возбудительные устройства для синхронных двигателей и много других устройств строились на тиристорах, а в последнее время их вытесняют преобразователи на транзисторах. Основной задачей для тиристора является включение нагрузки в момент подачи управляющего сигнала. В этой статье мы рассмотрим, как управлять тиристорами и симисторами.
Определение
Тиристор (тринистор) — это полупроводниковый полууправляемый ключ. Полууправляемый — значит, что вы можете только включать тиристор, отключается он только при прерывании тока в цепи или если приложить к нему обратное напряжение.
Он, подобно диоду, проводит ток только в одном направлении. То есть для включения в цепь переменного тока для управления двумя полуволнами нужно два тиристора, для каждой по одному, хотя не всегда. Тиристор состоит из 4 областей полупроводника (p-n-p-n).
Другой подобный прибор называется симистор — двунаправленный тиристор. Его основным отличием является то, что ток он может проводить в обе стороны. Фактически он представляет собой два тиристора соединённых параллельно навстречу друг другу.
Основные характеристики
Как и любых других электронных компонентов у тиристоров есть ряд характеристик:
- Падение напряжения при максимальном токе анода (VT или Uос).
- Прямое напряжение в закрытом состоянии (VD(RM) или Uзс).
- Обратное напряжение (VR(PM) или Uобр).
- Прямой ток (IT или Iпр) – это максимальный ток в открытом состоянии.
- Максимально допустимый прямой ток (ITSM) — это максимальный пиковый ток в открытом состоянии.
- Обратный ток (IR) — ток при определенном обратном напряжении.
- Постоянный ток в закрытом состоянии при определенном прямом напряжении (ID или Iзс).
- Постоянное отпирающее напряжение управления (VGT или UУ).
- Ток управления (IGT).
- Максимальный ток управления электрода IGM.
- Максимально допустимая рассеиваемая мощность на управляющем электроде (PG или Pу)
Принцип работы
Когда на тиристор подают напряжение он не проводит ток. Есть два способа включит его – подать напряжение между анодом и катодом достаточное для открытия, тогда его работа ничем не будет отличаться от динистора.
Другой способ – это подать кратковременный импульс на управляющий электрод. Ток открытия тиристора лежит в пределах 70-160 мА, хотя на практике эта величина, как и напряжение которое нужно приложить к тиристору зависит от конкретной модели и экземпляра полупроводникового прибора и даже от условий, в которых он работает, таких, например, как температура окружающей среды.
Кроме управляющего тока, есть такой параметр как ток удержания — это минимальный ток анода для удержания тиристора в открытом состоянии.
После открытия тиристора управляющий сигнал можно отключать, тиристор будет открыт до тех пор, пока через него протекает прямой ток и подано напряжение. То есть в цепи переменного тиристор будет открыт в течении той полуволны напряжение которой смещает тиристор в прямом направлении. Когда напряжение устремится к нулю, снизится и ток. Когда ток в цепи упадет ниже величины тока удержания тиристора — он закроется (выключится).
Полярность управляющего напряжения должна совпадать с полярностью напряжения между анодом и катодом, что вы наблюдаете на осциллограммах выше.
Управление симистором аналогично хоть и имеет некоторые особенности. Для управления симистором в цепи переменного тока нужно два импульса управляющего напряжения — на каждую полуволну синусоиды соответственно.
После подачи управляющего импульса в первой полуволне (условно положительной) синусоидального напряжения ток через симистор будет протекать до начала второй полуволны, после чего он закроется, как и обычный тиристор. После этого нужно подать еще один управляющий импульс для открытия симистора на отрицательной полуволне. Это наглядно проиллюстрировано на следующих осциллограммах.
Полярность управляющего напряжения должна соответствовать полярности приложенного напряжения между анодом и катодом. Из-за этого возникают проблемы при управлении симисторами с помощью цифровых логических схем или от выходов микроконтроллера. Но это легко решается путем установки симисторного драйвера, о чем мы поговорим позже.
Распространенные схемы управления тиристорами или симисторами
Самой распространенной схемой является симисторный или тиристорный регулятор.
Здесь тиристор открывается после того как на конденсаторе будет достаточная величина для его открытия. Момент открытия регулируется с помощью потенциометра или переменного резистора. Чем больше его сопротивление — тем медленнее заряжается конденсатор. Резистор R2 ограничивает ток через управляющий электрод.
Эта схема регулирует оба полупериода, то есть вы получаете полную регулировку мощности почти от 0% и почти до 100%. Это удалось достичь, установив регулятор в диодном мосте, таким образом регулируется одна из полуволн.
Упрощенная схема изображена ниже, здесь регулируется лишь половина периода, вторая полуволна проходит без изменения через диод VD1. Принцип работы аналогичен.
Симисторный регулятор без диодного моста позволяет управлять двумя полуволнами.
По принципу действия почти аналогична предыдущим, но построена на симисторе с её помощью регулируются уже обе полуволны. Отличия заключаются в том, что здесь импульс управления подаётся с помощью двунаправленного динистора DB3, после того как конденсатор зарядится до нужного напряжения, обычно это 28-36 Вольт. Скорость зарядки также регулируется переменным резистором или потенциометром. Такая схема реализована в большинстве бытовых диммеров.
Интересно:
Такие схемы регулировки напряжения называется СИФУ — система импульсного фазового управления.
На рисунке выше изображен вариант управления симистором с помощью микроконтроллера, на примере популярной платформы Arduino. Симисторный драйвер состоит из оптосимистора и светодиода. Так как в выходной цепи драйвера установлен оптосимистор на управляющий электрод всегда подаётся напряжение нужной полярности, но здесь есть некоторые нюансы.
Дело в том, что для регулировки напряжения с помощью симистора или тиристора нужно подавать управляющий сигнал в определенный момент времени, так чтобы срез фазы происходил до нужной величины. Если наугад стрелять управляющими импульсами — схема работать конечно будет, но регулировок добиться не выйдет, поэтому нужно определять момент перехода полуволны через ноль.
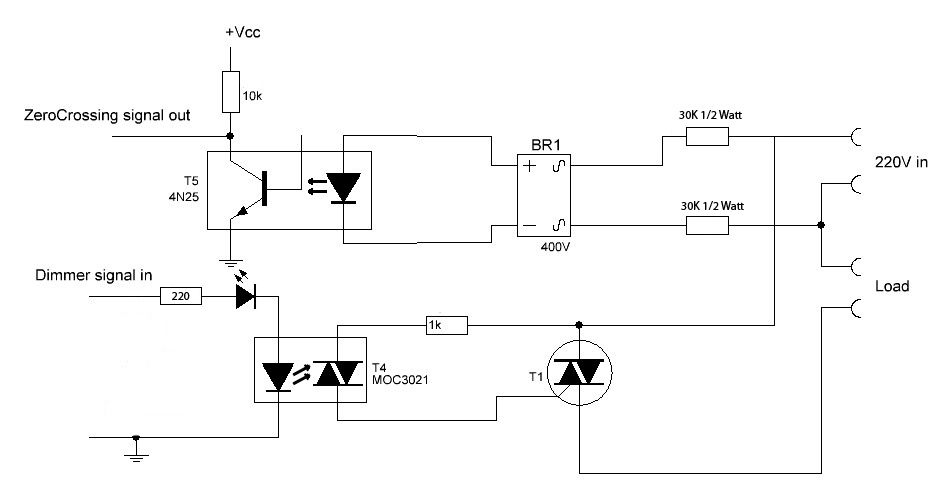
Так как для нас не имеет значения полярность полуволны в настоящий момент времени — достаточно просто отслеживать момент перехода через ноль. Такой узел в схеме называют детектор нуля или нуль-детектор, а в англоязычных источниках «zero crossing detector circuit» или ZCD. Вариант такой схемы с детектором перехода через ноль на транзисторной оптопаре выглядит следующим образом:
Оптодрайверов для управления симисторами есть множество, типовые – это линейка MOC304x, MOC305x, MOC306X, произведенные компанией Motorola и другими. Более того – эти драйверы обеспечивают гальваническую развязку, что убережет ваш микроконтроллер в случае пробоя полупроводникового ключа, что вполне возможно и вероятно. Также это повысит безопасность работы с цепями управления, полностью разделив цепь на «силовую» и «оперативную».
Заключение
Мы рассказали базовые сведения о тиристорах и симисторах, а также управлении ими в цепях с «переменкой». Стоит отметить, что мы не затрагивали тему запираемых тиристоров, если вас интересует этот вопрос – пишите комментарии и мы рассмотрим их подробнее. Также не были рассмотрены нюансы использования и управления тиристорами в силовых индуктивных цепях. Для управления «постоянкой» лучше использовать транзисторы, поскольку в этом случае вы решаете, когда ключ откроется, а когда он закроется, повинуясь управляющему сигналу…
Управление симистором через оптопару
Тиристоры нашли широкое применение в полупроводниковых устройствах и преобразователях. Различные источники питания, частотные преобразователи, регуляторы, возбудительные устройства для синхронных двигателей и много других устройств строились на тиристорах, а в последнее время их вытесняют преобразователи на транзисторах. Основной задачей для тиристора является включение нагрузки в момент подачи управляющего сигнала. В этой статье мы рассмотрим, как управлять тиристорами и симисторами.
Определение
Тиристор (тринистор) – это полупроводниковый полууправляемый ключ. Полууправляемый – значит, что вы можете только включать тиристор, отключается он только при прерывании тока в цепи или если приложить к нему обратное напряжение.
Он, подобно диоду, проводит ток только в одном направлении. То есть для включения в цепь переменного тока для управления двумя полуволнами нужно два тиристора, для каждой по одному, хотя не всегда. Тиристор состоит из 4 областей полупроводника (p-n-p-n).
Другой подобный прибор называется симистор – двунаправленный тиристор. Его основным отличием является то, что ток он может проводить в обе стороны. Фактически он представляет собой два тиристора соединённых параллельно навстречу друг другу.
Основные характеристики
Как и любых других электронных компонентов у тиристоров есть ряд характеристик:
Падение напряжения при максимальном токе анода (VT или Uос).
Прямое напряжение в закрытом состоянии (VD(RM) или Uзс).
Обратное напряжение (VR(PM) или Uобр).
Прямой ток (IT или Iпр) – это максимальный ток в открытом состоянии.
Максимально допустимый прямой ток (ITSM) — это максимальный пиковый ток в открытом состоянии.
Обратный ток (IR) — ток при определенном обратном напряжении.
Постоянный ток в закрытом состоянии при определенном прямом напряжении (ID или Iзс).
Постоянное отпирающее напряжение управления (VGT или UУ).
Ток управления (IGT).
Максимальный ток управления электрода IGM.
Максимально допустимая рассеиваемая мощность на управляющем электроде (PG или Pу)
Принцип работы
Когда на тиристор подают напряжение он не проводит ток. Есть два способа включит его – подать напряжение между анодом и катодом достаточное для открытия, тогда его работа ничем не будет отличаться от динистора.
Другой способ – это подать кратковременный импульс на управляющий электрод. Ток открытия тиристора лежит в пределах 70-160 мА, хотя на практике эта величина, как и напряжение которое нужно приложить к тиристору зависит от конкретной модели и экземпляра полупроводникового прибора и даже от условий, в которых он работает, таких, например, как температура окружающей среды.
Кроме управляющего тока, есть такой параметр как ток удержания – это минимальный ток анода для удержания тиристора в открытом состоянии.
После открытия тиристора управляющий сигнал можно отключать, тиристор будет открыт до тех пор, пока через него протекает прямой ток и подано напряжение. То есть в цепи переменного тиристор будет открыт в течении той полуволны напряжение которой смещает тиристор в прямом направлении. Когда напряжение устремится к нулю, снизится и ток. Когда ток в цепи упадет ниже величины тока удержания тиристора – он закроется (выключится).
Полярность управляющего напряжения должна совпадать с полярностью напряжения между анодом и катодом, что вы наблюдаете на осциллограммах выше.
Управление симистором аналогично хоть и имеет некоторые особенности. Для управления симистором в цепи переменного тока нужно два импульса управляющего напряжения – на каждую полуволну синусоиды соответственно.
После подачи управляющего импульса в первой полуволне (условно положительной) синусоидального напряжения ток через симистор будет протекать до начала второй полуволны, после чего он закроется, как и обычный тиристор. После этого нужно подать еще один управляющий импульс для открытия симистора на отрицательной полуволне. Это наглядно проиллюстрировано на следующих осциллограммах.
Полярность управляющего напряжения должна соответствовать полярности приложенного напряжения между анодом и катодом. Из-за этого возникают проблемы при управлении симисторами с помощью цифровых логических схем или от выходов микроконтроллера. Но это легко решается путем установки симисторного драйвера, о чем мы поговорим позже.
Распространенные схемы управления тиристорами или симисторами
Самой распространенной схемой является симисторный или тиристорный регулятор.
Здесь тиристор открывается после того как на конденсаторе будет достаточная величина для его открытия. Момент открытия регулируется с помощью потенциометра или переменного резистора. Чем больше его сопротивление – тем медленнее заряжается конденсатор. Резистор R2 ограничивает ток через управляющий электрод.
Эта схема регулирует оба полупериода, то есть вы получаете полную регулировку мощности почти от 0% и почти до 100%. Это удалось достичь, установив регулятор в диодном мосте, таким образом регулируется одна из полуволн.
Упрощенная схема изображена ниже, здесь регулируется лишь половина периода, вторая полуволна проходит без изменения через диод VD1. Принцип работы аналогичен.
Симисторный регулятор без диодного моста позволяет управлять двумя полуволнами.
По принципу действия почти аналогична предыдущим, но построена на симисторе с её помощью регулируются уже обе полуволны. Отличия заключаются в том, что здесь импульс управления подаётся с помощью двунаправленного динистора DB3, после того как конденсатор зарядится до нужного напряжения, обычно это 28-36 Вольт. Скорость зарядки также регулируется переменным резистором или потенциометром. Такая схема реализована в большинстве бытовых диммеров.
Такие схемы регулировки напряжения называется СИФУ – система импульсного фазового управления.
На рисунке выше изображен вариант управления симистором с помощью микроконтроллера, на примере популярной платформы Arduino. Симисторный драйвер состоит из оптосимистора и светодиода. Так как в выходной цепи драйвера установлен оптосимистор на управляющий электрод всегда подаётся напряжение нужной полярности, но здесь есть некоторые нюансы.
Дело в том, что для регулировки напряжения с помощью симистора или тиристора нужно подавать управляющий сигнал в определенный момент времени, так чтобы срез фазы происходил до нужной величины. Если наугад стрелять управляющими импульсами – схема работать конечно будет, но регулировок добиться не выйдет, поэтому нужно определять момент перехода полуволны через ноль.
Так как для нас не имеет значения полярность полуволны в настоящий момент времени – достаточно просто отслеживать момент перехода через ноль. Такой узел в схеме называют детектор нуля или нуль-детектор, а в англоязычных источниках «zero crossing detector circuit» или ZCD. Вариант такой схемы с детектором перехода через ноль на транзисторной оптопаре выглядит следующим образом:
Оптодрайверов для управления симисторами есть множество, типовые – это линейка MOC304x, MOC305x, MOC306X, произведенные компанией Motorola и другими. Более того – эти драйверы обеспечивают гальваническую развязку, что убережет ваш микроконтроллер в случае пробоя полупроводникового ключа, что вполне возможно и вероятно. Также это повысит безопасность работы с цепями управления, полностью разделив цепь на «силовую» и «оперативную».
Заключение
Мы рассказали базовые сведения о тиристорах и симисторах, а также управлении ими в цепях с «переменкой». Стоит отметить, что мы не затрагивали тему запираемых тиристоров, если вас интересует этот вопрос – пишите комментарии и мы рассмотрим их подробнее. Также не были рассмотрены нюансы использования и управления тиристорами в силовых индуктивных цепях. Для управления «постоянкой» лучше использовать транзисторы, поскольку в этом случае вы решаете, когда ключ откроется, а когда он закроется, повинуясь управляющему сигналу…
Тиристоры нашли широкое применение в полупроводниковых устройствах и преобразователях. Различные источники питания, частотные преобразователи, регуляторы, возбудительные устройства для синхронных двигателей и много других устройств строились на тиристорах, а в последнее время их вытесняют преобразователи на транзисторах. Основной задачей для тиристора является включение нагрузки в момент подачи управляющего сигнала. В этой статье мы рассмотрим, как управлять тиристорами и симисторами.
Определение
Тиристор (тринистор) – это полупроводниковый полууправляемый ключ. Полууправляемый – значит, что вы можете только включать тиристор, отключается он только при прерывании тока в цепи или если приложить к нему обратное напряжение.
Он, подобно диоду, проводит ток только в одном направлении. То есть для включения в цепь переменного тока для управления двумя полуволнами нужно два тиристора, для каждой по одному, хотя не всегда. Тиристор состоит из 4 областей полупроводника (p-n-p-n).
Другой подобный прибор называется симистор – двунаправленный тиристор. Его основным отличием является то, что ток он может проводить в обе стороны. Фактически он представляет собой два тиристора соединённых параллельно навстречу друг другу.
Основные характеристики
Как и любых других электронных компонентов у тиристоров есть ряд характеристик:
Падение напряжения при максимальном токе анода (VT или Uос).
Прямое напряжение в закрытом состоянии (VD(RM) или Uзс).
Обратное напряжение (VR(PM) или Uобр).
Прямой ток (IT или Iпр) – это максимальный ток в открытом состоянии.
Максимально допустимый прямой ток (ITSM) — это максимальный пиковый ток в открытом состоянии.
Обратный ток (IR) — ток при определенном обратном напряжении.
Постоянный ток в закрытом состоянии при определенном прямом напряжении (ID или Iзс).
Постоянное отпирающее напряжение управления (VGT или UУ).
Ток управления (IGT).
Максимальный ток управления электрода IGM.
Максимально допустимая рассеиваемая мощность на управляющем электроде (PG или Pу)
Принцип работы
Когда на тиристор подают напряжение он не проводит ток. Есть два способа включит его – подать напряжение между анодом и катодом достаточное для открытия, тогда его работа ничем не будет отличаться от динистора.
Другой способ – это подать кратковременный импульс на управляющий электрод. Ток открытия тиристора лежит в пределах 70-160 мА, хотя на практике эта величина, как и напряжение которое нужно приложить к тиристору зависит от конкретной модели и экземпляра полупроводникового прибора и даже от условий, в которых он работает, таких, например, как температура окружающей среды.
Кроме управляющего тока, есть такой параметр как ток удержания – это минимальный ток анода для удержания тиристора в открытом состоянии.
После открытия тиристора управляющий сигнал можно отключать, тиристор будет открыт до тех пор, пока через него протекает прямой ток и подано напряжение. То есть в цепи переменного тиристор будет открыт в течении той полуволны напряжение которой смещает тиристор в прямом направлении. Когда напряжение устремится к нулю, снизится и ток. Когда ток в цепи упадет ниже величины тока удержания тиристора – он закроется (выключится).
Полярность управляющего напряжения должна совпадать с полярностью напряжения между анодом и катодом, что вы наблюдаете на осциллограммах выше.
Управление симистором аналогично хоть и имеет некоторые особенности. Для управления симистором в цепи переменного тока нужно два импульса управляющего напряжения – на каждую полуволну синусоиды соответственно.
После подачи управляющего импульса в первой полуволне (условно положительной) синусоидального напряжения ток через симистор будет протекать до начала второй полуволны, после чего он закроется, как и обычный тиристор. После этого нужно подать еще один управляющий импульс для открытия симистора на отрицательной полуволне. Это наглядно проиллюстрировано на следующих осциллограммах.
Полярность управляющего напряжения должна соответствовать полярности приложенного напряжения между анодом и катодом. Из-за этого возникают проблемы при управлении симисторами с помощью цифровых логических схем или от выходов микроконтроллера. Но это легко решается путем установки симисторного драйвера, о чем мы поговорим позже.
Распространенные схемы управления тиристорами или симисторами
Самой распространенной схемой является симисторный или тиристорный регулятор.
Здесь тиристор открывается после того как на конденсаторе будет достаточная величина для его открытия. Момент открытия регулируется с помощью потенциометра или переменного резистора. Чем больше его сопротивление – тем медленнее заряжается конденсатор. Резистор R2 ограничивает ток через управляющий электрод.
Эта схема регулирует оба полупериода, то есть вы получаете полную регулировку мощности почти от 0% и почти до 100%. Это удалось достичь, установив регулятор в диодном мосте, таким образом регулируется одна из полуволн.
Упрощенная схема изображена ниже, здесь регулируется лишь половина периода, вторая полуволна проходит без изменения через диод VD1. Принцип работы аналогичен.
Симисторный регулятор без диодного моста позволяет управлять двумя полуволнами.
По принципу действия почти аналогична предыдущим, но построена на симисторе с её помощью регулируются уже обе полуволны. Отличия заключаются в том, что здесь импульс управления подаётся с помощью двунаправленного динистора DB3, после того как конденсатор зарядится до нужного напряжения, обычно это 28-36 Вольт. Скорость зарядки также регулируется переменным резистором или потенциометром. Такая схема реализована в большинстве бытовых диммеров.
Такие схемы регулировки напряжения называется СИФУ – система импульсного фазового управления.
На рисунке выше изображен вариант управления симистором с помощью микроконтроллера, на примере популярной платформы Arduino. Симисторный драйвер состоит из оптосимистора и светодиода. Так как в выходной цепи драйвера установлен оптосимистор на управляющий электрод всегда подаётся напряжение нужной полярности, но здесь есть некоторые нюансы.
Дело в том, что для регулировки напряжения с помощью симистора или тиристора нужно подавать управляющий сигнал в определенный момент времени, так чтобы срез фазы происходил до нужной величины. Если наугад стрелять управляющими импульсами – схема работать конечно будет, но регулировок добиться не выйдет, поэтому нужно определять момент перехода полуволны через ноль.
Так как для нас не имеет значения полярность полуволны в настоящий момент времени – достаточно просто отслеживать момент перехода через ноль. Такой узел в схеме называют детектор нуля или нуль-детектор, а в англоязычных источниках «zero crossing detector circuit» или ZCD. Вариант такой схемы с детектором перехода через ноль на транзисторной оптопаре выглядит следующим образом:
Оптодрайверов для управления симисторами есть множество, типовые – это линейка MOC304x, MOC305x, MOC306X, произведенные компанией Motorola и другими. Более того – эти драйверы обеспечивают гальваническую развязку, что убережет ваш микроконтроллер в случае пробоя полупроводникового ключа, что вполне возможно и вероятно. Также это повысит безопасность работы с цепями управления, полностью разделив цепь на «силовую» и «оперативную».
Заключение
Мы рассказали базовые сведения о тиристорах и симисторах, а также управлении ими в цепях с «переменкой». Стоит отметить, что мы не затрагивали тему запираемых тиристоров, если вас интересует этот вопрос – пишите комментарии и мы рассмотрим их подробнее. Также не были рассмотрены нюансы использования и управления тиристорами в силовых индуктивных цепях. Для управления «постоянкой» лучше использовать транзисторы, поскольку в этом случае вы решаете, когда ключ откроется, а когда он закроется, повинуясь управляющему сигналу…
Оптосимисторы относится к виду оптронов с отличными электрическими параметрами. Они создают крайне надежную гальваническую развязку, выдерживающую напряжение порядка 7,5кВ, имеющуюся между подключенной управляемой нагрузкой и схемой управления.
Данные радиокомпоненты построены из арсенид-галлиевого ИК светодиода, имеющего связь с кремниевым двухканальным переключателем. В свою очередь этот переключатель может иметь в своем составе отпирающий элемент, который включается в момент перехода через ноль питающего переменного напряжения.
Оптосимисторы необычно полезны при осуществлении контроля за более мощными симисторами. Аналогичные оптосимисторы были спроектированы для реализации связи между нагрузкой, которая питается переменным напряжением 220 вольт и логикой с низким уровнем напряжения.
Оптосимистор, как правило, выпускаются в компактном DIP-корпусе, имеющий шесть контактов. Его внутренняя схема, параметры, а так же распиновка, показаны ниже.
Схема подключения активной нагрузки к оптосимистору
В этой схеме имеется два компонента, которые необходимо вычислить, но фактически подобные расчеты параметров выполняются не всегда. Но все, же приведем эти расчеты параметров для информации.
Расчет параметра резистора RD . Вычисление сопротивления данного резистора влияет от наименьшего прямого тока ИК светодиода, обеспечивающего открытие симистора. Таким образом,
Допустим, для схемы с транзисторным контролем (которое применяется довольно часто в схемах регуляторов температуры), имеющим питания 12В и напряжение на открытом транзисторе (Uкэ) 0,3 В; VDD = 11,7 B и следовательно диапазон If приблизительно равен 15мА для MOC3041.
Необходимо сделать If = 20 мА с учетом понижения эффективности свечения светодиода в течении срока службы (добавить 5 мА) получаем:
RD=(11,7В — 1,5В)/0,02А = 510 Ом.
Расчет параметра сопротивления R . Управляющий электрод оптосимистора может выдержать определенный максимальный ток. Увеличение данного параметра выводит из строя оптрон. Следовательно, нужно вычислить сопротивление, чтобы при наибольшем напряжении сети (к примеру, 220 В) ток не был больше максимально допустимого параметра.
Для примера возьмем максимально-допустимый ток в 1А, тогда сопротивление будет равно:
R=220 В * 1,44 / 1 А = 311 Ом.
Нужно иметь в виду, что слишком большое сопротивление данного резистора может оказать нарушение в стабильности включения оптосимистора.
Расчет параметра сопротивления Rg . Резистор Rg подключается, только если электрод симистора имеет повышенную чувствительность. Как правило, сопротивление Rg находится в диапазоне от 100 Ом до 5 кОм. Желательно применять 1 кОм.
В случае если в управляемой нагрузке есть индуктивная составляющая, то необходимо применять другую схему подключения с защитой силового симистора и оптосимистора.
Схема подключения индуктивной нагрузки к оптосимистору
Сигнал, поступающий от оптосимистора на управляющий электрод симистора, нужен только для его открывания. Но при большой частоте переключения коммутируемого напряжения, возникает большая вероятность спонтанного включения управляемого симистора, даже если отсутствует сигнал управления.
Факторами ложных срабатываний могут быть выбросы напряжения при включении ключа, подключенного к индуктивной нагрузке, импульсные помехи в линиях питания нагрузки. Действенный способ устранения данных неприятных моментов – применение в схеме снабберной (демпфирующей) RC – цепочки, которая подключается параллельно выходу ключевого блока.
Конденсатор в снабберной RC-цепи — металлопленочный с номиналом от 0,01 до 0,1 мкФ, сопротивление резистора составляет 20…500 Ом. Данные параметры элементов необходимо рассматривать исключительно в качестве приблизительных величин.
Два микроконтроллерных регулятора мощности. Алгоритм вывода прямой линии Алгоритм брезенхема формула для управления нагревателем
Алгоритм Брезенхема является одним из старейших алгоритмов в машинной графике. Казалось бы, как можно применить алгоритм построения растровых прямых при создании домашней паяльной печи? Оказывается можно, причем с очень достойным результатом. Забегая вперед, скажу, что данный алгоритм очень хорошо скармливается маломощному 8-битному микроконтроллеру. Но обо всем по порядку.
Алгоритм Брезенхема — это алгоритм, определяющий, какие точки двумерного растра нужно закрасить, чтобы получить близкое приближение прямой линии между двумя заданными точками. Суть алгоритма заключается в том, чтобы для каждого столбца X (см. рисунок) определить какая строка Y ближе всего к линии, и нарисовать точку.
Теперь посмотрим как подобный алгоритм поможет нам при управлении ТЭНами в электропечи.
ТЭН питается от сетевого напряжения 220В/50Hz. Взглянем на график.
При подаче такого напряжения в чистом его виде на вход электронагревателя мы получим на выходе 100% мощность нагрева. Все просто.
Что будет если подать на вход ТЭНа только положительную полуволну сетевого напряжения? Правильно, мы получим 50% выходной мощности нагрева.
Если подать каждую третью полуволну, мы получим 33% мощности.
В качестве примера возьмем 10% градацию выходной мощности и временной отрезок в 100мс, что равносильно 10 полуволнам сетевого напряжения. Нарисуем сетку 10х10 и представим, что ось Y это ось значений выходной мощности. Проведем прямую от 0 до необходимого значения мощности.
Прослеживаете зависимость?
Увеличив временной отрезок до 1 сек, можно получить градацию выходной мощности в 1%. Получится сетка 100х100 со всеми вытекающими.
А теперь о приятном:
Алгоритм Брезенхема можно построить в цикле таким образом, чтобы на каждом шаге по оси X
просто отслеживать значение ошибки, которое означает — вертикальное расстояние между текущим значением y
и точным значением y
для текущего x
. Всякий раз, когда мы увеличиваем x
, мы увеличиваем значение ошибки на величину наклона. Если ошибка превысила 0.5, линия стала ближе к следующему y
, поэтому мы увеличиваем y
на единицу (читай — пропускаем одну полуволну напряжения), одновременно уменьшая значение ошибки на 1.
Такой подход легко сводится к циклическому целочисленному сложению (об этом позже, при описании алгоритма работы МК в следующей статье), что несомненный плюс для микроконтроллеров.
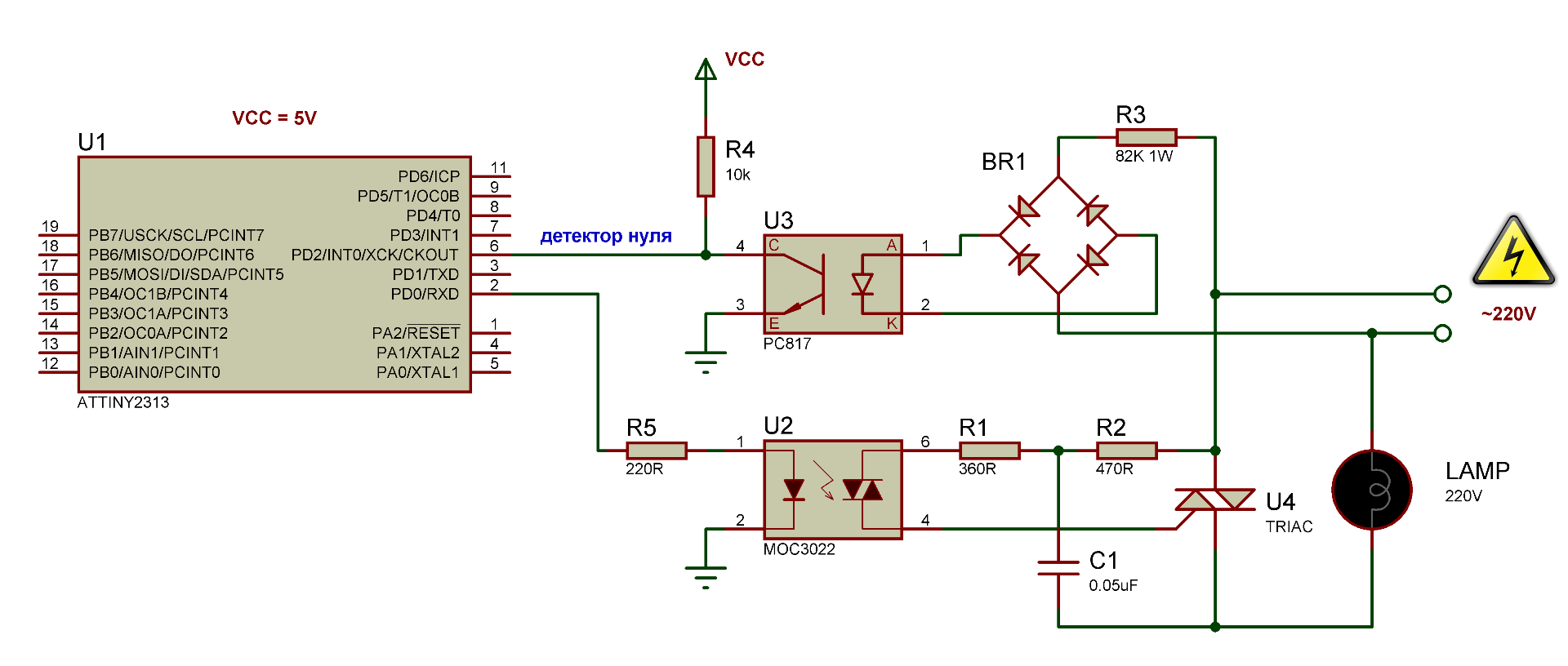
Я намеренно не стал грузить вас формулами. Алгоритм элементарный, легко гуглится. Я лишь хочу показать его возможность применения в схемотехнике. Для управления нагрузкой будет использоваться типовая схема подключения симисторной оптопары MOC3063 с детектором нуля.
При таком подходе есть ряд преимуществ.
- Минимальные помехи в сети из-за частых коммутаций большой нагрузки, включение/выключение будет происходить в моменты перехода напряжения через ноль.
- Очень простой алгоритм — все вычисления сводятся к работе с целыми числами, что хорошо для микроконтроллера.
- Нет необходимости городить детектор перехода напряжения через ноль (привет MOC3063). Даже если МК будет просто дергать ногой по таймеру, открывая оптопару, ошибка будет не критичной.
Продолжение следует.
Алгоритм Брезенхема является одним из старейших алгоритмов в машинной графике. Казалось бы, как можно применить алгоритм построения растровых прямых при создании домашней паяльной печи? Оказывается можно, причем с очень достойным результатом. Забегая вперед, скажу, что данный алгоритм очень хорошо скармливается маломощному 8-битному микроконтроллеру. Но обо всем по порядку.
Алгоритм Брезенхе́ма — это алгоритм, определяющий, какие точки двумерного растра нужно закрасить, чтобы получить близкое приближение прямой линии между двумя заданными точками. Суть алгоритма заключается в том, чтобы для каждого столбца X (см. рисунок) определить какая строка Y ближе всего к линии, и нарисовать точку.
Теперь посмотрим как подобный алгоритм поможет нам при управлении ТЭНами в электропечи.
ТЭН питается от сетевого напряжения 220В/50Hz. Взглянем на график.
При подаче такого напряжения в чистом его виде на вход электронагревателя мы получим на выходе 100% мощность нагрева. Все просто.
Что будет если подать на вход ТЭНа только положительную полуволну сетевого напряжения? Правильно, мы получим 50% выходной мощности нагрева.
Если подать каждую третью полуволну, мы получим 33% мощности.
В качестве примера возьмем 10% градацию выходной мощности и временной отрезок в 100мс, что равносильно 10 полуволнам сетевого напряжения. Нарисуем сетку 10х10 и представим, что ось Y это ось значений выходной мощности. Проведем прямую от 0 до необходимого значения мощности.
Прослеживаете зависимость?
Увеличив временной отрезок до 1 сек, можно получить градацию выходной мощности в 1%. Получится сетка 100х100 со всеми вытекающими.
А теперь о приятном:
Алгоритм Брезенхема можно построить в цикле таким образом, чтобы на каждом шаге по оси X
просто отслеживать значение ошибки, которое означает — вертикальное расстояние между текущим значением y
и точным значением y
для текущего x
. Всякий раз, когда мы увеличиваем x
, мы увеличиваем значение ошибки на величину наклона. Если ошибка превысила 0.5, линия стала ближе к следующему y
, поэтому мы увеличиваем y
на единицу (читай — пропускаем одну полуволну напряжения), одновременно уменьшая значение ошибки на 1.
Такой подход легко сводится к циклическому целочисленному сложению (об этом позже, при описании алгоритма работы МК в следующей статье), что несомненный плюс для микроконтроллеров.
Я намеренно не стал грузить вас формулами. Алгоритм элементарный, легко гуглится. Я лишь хочу показать его возможность применения в схемотехнике. Для управления нагрузкой будет использоваться типовая схема подключения симисторной оптопары MOC3063 с детектором нуля.
При таком подходе есть ряд преимуществ.
- Минимальные помехи в сети из-за частых коммутаций большой нагрузки, включение/выключение будет происходить в моменты перехода напряжения через ноль.
- Очень простой алгоритм — все вычисления сводятся к работе с целыми числами, что хорошо для микроконтроллера.
- Нет необходимости городить детектор перехода напряжения через ноль (привет MOC3063). Даже если МК будет просто дергать ногой по таймеру, открывая оптопару, ошибка будет не критичной.
Продолжение следует.
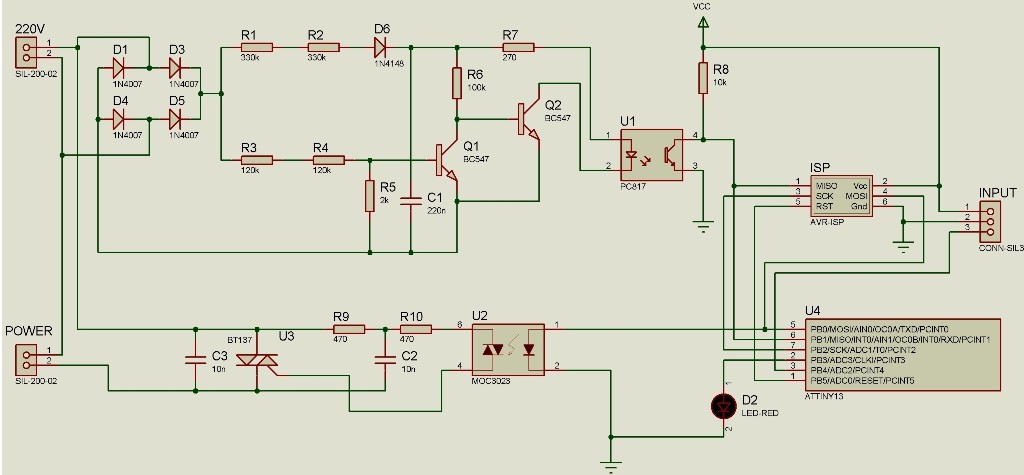
Введение На производстве (в системах автоматизированного управления), в быту зачастую необходимо использовать регулировку мощности, подаваемую на нагрузку. Как правило, нагрузка работает от сети переменного тока. Поэтому задача несколько усложняется, в сравнении с регулировкой мощности нагрузки, работающей на постоянном напряжении. В случае работы нагрузки на постоянном напряжении применяют широтноимпульсную модуляцию (ШИМ), и изменяя скважность соответственно изменяется и мощность, подаваемая на нагрузку. Если использовать управление с помощью ШИМ для регулировки мощности в сети переменного тока, ключ через который регулируем сигнал (например, симистор) будет открываться и пропускать в нагрузку части синусоиды, имеющие разную мощность. Элементная база и сборка регулятора Рис.1. Электрическая принципиальная схема регулятора Для реализации данного проекта были использованы: Pinboard на AVR микроконтроллере ATmega16, симистор Philips BT138 12А, диодный мост DB105, оптосимистор MOC3022, оптопара PC817, сопротивления 220 Ом — 10 кОм, потенциометр 5 кОм. Подключение элементов показано на рис.1. Принцип работы устройства Данный регулятор предназначен для работы с активной нагрузкой, подключаемой к сети напряжением 220 В. Для определения начало каждой полуволны используется оптопара. Таким образом, на выходе детектора нуля получаем короткие положительные импульсы в момент, когда напряжение в сети проходит через 0. Сигнал с детектора нуля подключен на вход внешнего прерывания МК, чтобы определять начало новой полуволны и открывать симистор на необходимое время или на определенное количество полупериодов. Для отпирания симистора на его управляющий электрод подаётся напряжение через оптосимистор относительно условного катода. Фазовый метод При фазовом методе, изменяя значение задержки таймера посредством АЦП микроконтроллера (в нашем случае потенциометром), соответственно изменяем задержку открытия симистора после начала полуволны. Чем больше задержка, тем меньшая часть полуволны будет пропущена на нагрузку и соответственно получаем меньшую мощность, и наоборот. Зная частоту тактирования микроконтроллера, рассчитана задержка. При частоте сетевого напряжения 50 Гц время полупериода составит 0,01 секунды. То есть, если симистор открыт через 0,003 сек, будет пропущено приблизительно 2/3 полуволны, и мощность составит 70%. Если симистор будет открыт без задержки, то пропущена вся полуволна, и выходная мощность составит 100%. Была реализована программа с применением фазового метода управления нагрузкой. Программирование осуществлялось на языке С++ в среде CodeVisionAVR. Показания с осциллографа на нагрузке приведены на рисунке 2. Рис.2. Регулировка мощности фазовым методом Расчет задержки на открытие симистора Так как функция напряжения не линейная, то есть площадь под синусоидой при одном и том же интервале времени будет разной, соответственно и мощность будет разная. Поэтому задержка была рассчитана с учетом нелинейности напряжения. На рисунке 3 показана синусоида сети и интервалы задержки, рассчитанные в таблице 1. Показаны первые пять из ста (в процентах) значений задержки. Рис.3. Регулировка фазовым методом Таблица 1 Расчет задержек на открытие симистора Номер точки полуволны Время в микросекундах Синус точки 0 0 0 1 638 0,199 2 903 0,279 3 1108 0,341 4 1282 0,391 5 1436 0,435 Метод Брезенхема Существует также метод регулировки мощности, основанный на принципе подачи на нагрузку нескольких полупериодов сетевого напряжения с последующей паузой (Рис.4). Моменты коммутации симистора совпадают с моментами перехода сетевого напряжения через ноль, поэтому уровень радиопомех резко снижен. Применение микроконтроллера позволило использовать для равномерного распределения импульсов алгоритм Брезенхема. Однако наблюдается пониженная частота коммутации тока в нагрузке в сравнении с фазовым управлением. Предпочтителен для управления нагрузкой большой мощности (от 1 кВт). Была реализована программа, и также как и в фазовом методе по АЦП изменялось количество пропущенных полупериодов. Был выбран диапазон пропускание от каждой полуволны до пропускания одной полуволны к десяти. На рисунке 4 показаны изображения с осциллографа реализации регулятора методом Брезенхема. Рис.4. Регулировка мощности методом Брезенхема Заключение Регулятор универсален, что дает возможность применить его как в быту, так и в промышленности. Наличие микроконтроллерного управления позволяет быстро перенастроить систему, что обуславливает гибкость устройства. Два алгоритма управления позволят применять регулятор в широких диапазонах мощностей.
Регулятор мощности для паяльника.
Данный регулятор позволяет регулировать мощность на нагрузке двумя способами.
- Фазоимпульсным — изменение угла открытия симистора.
- По пропуску нужного кол-ва полупериодов.
Для второго способа распределение импульсов находится по алгоритму Брезенхема, исходный код данного решения я полностью взял из статей и постов на форумах уважаемого Ридико Леонида Ивановича , большое ему спасибо!
Регулятор управляется тремя кнопками:
- SET – при удержании более 2сек вход в режим настроек, при кратковременном нажатии листание трех быстрых уставок мощности.
- Минус.
- Плюс.
Регулятор позволяет хранить 3 быстрые настройки мощности. Есть функция авто выключения, если в течении 30 минут не было нажатий на кнопки, индикатор начинает мигать, далее, через 10 минут произойдет выключение нагрузки.
Блок схема управления в режиме настроек.
При нажатии SET с удержанием более 2сек на экран выводится надпись РЕГ, далее кнопками плюс/минус выбирается нужный алгоритм
- PAU — алгоритм Брезенхема.
- FI – фазоимпульсный.
ЧИС – регулировка от 0..145. То есть полупериод разбит на 145 значений. ПРЦ – регулирование от 0 до 100%, то есть идет автоматический пересчет шкалы 145 в проценты Далее идут три быстрых уставки мощности “-1-” ”-2- ” ”-3-”.
INC – шаг на который будет увеличиваться/уменьшаться мощность кнопками плюс/минус.
_t_ — управление функцией авто-выключения ON-включено, OFF-выключено.
Как видно из блок-схемы быстрые устваки мощности для режимов PAU и FI(ПРЦ) используются одни и те же, так как их диапазон 0..100. Для FI(ЧИС) свои уставки, так как их диапазон 0..145.
Доступно быстрое включение регулятора на полную мощность нажатием двух кнопок SET+ПЛЮС (кнопку SET следует нажимать немного ранее), при этом на экран выведется надпись “on”. Быстрое выключение по нажатию SET+МИНУС, при этом на экран выведется надпись “OFF”.
Диагностические сообщения.
- noC – нет синхроимпульсов, при этом запрещается подача управляющих импульсов на симистор.
- EEP – ошибка данных в EEPROM, лечится заходом в режим настроек, после редактирования параметров надпись пропадает.
В железе.
Поскольку экран растрового дисплея с электронно-лучевой трубкой (ЭЛТ) можно рассматривать как матрицу дискретных элементов (пикселов), каждый из которых может быть подсвечен, нельзя непосредственно провести отрезок из одной точки в другую. Процесс определения пикселов, наилучшим образом аппроксимирующих заданный отрезок, называется разложением в растр. В сочетании с процессом построчной визуализации изображения он известен как преобразование растровой развертки. Для горизонтальных, вертикальных и наклоненных под углом 45°. отрезков выбор растровых элементов очевиден. При любой другой ориентации выбрать нужные пикселы труднее, что показано на рис.1.
Рис.1.1. Разложение в растр отрезков прямых.
Общие требования к алгоритмам вычерчивания отрезков следующие: Отрезки должны выглядеть прямыми, начинаться и заканчиваться в заданных точках, яркость вдоль отрезка должна быть постоянной и не зависеть от длины и наклона, рисовать нужно быстро.
Постоянная вдоль всего отрезка яркость достигается лишь при проведении горизонтальных, вертикальных и наклоненных под углом 45° прямых. Для всех других ориентаций разложение в растр приведет к неравномерности яркости, как это показано на рис. 1.
В большинстве алгоритмов вычерчивания отрезков для упрощения вычислений используется пошаговый алгоритм. Приведем пример подобного алгоритма:
Простой пошаговый алгоритм
позиция = начало
шаг = приращение
1. if позиция — конец then 4
if позици > конец then 2
if позиция then 3
2. позиция = позиция — шаг
3. позиция = позиция + шаг
4. finish
Алгоритм Брезенхема.
Хотя алгоритм Брезенхема был первоначально разработан для цифровых графопостроителей, однако он в равной степени подходит для использования растровыми устройствами с ЭЛТ. Алгоритм выбирает оптимальные растровые координаты для представления отрезка. В процессе работы одна из координат — либо x, либо y (в зависиимости от углового коэффициента) — изменяется на единицу. Изменение другой координаты (на 0 или 1) зависит от расстояния между действительным положением отрезка и ближайшими координатами сетки. Такое расстояние мы назовем ошибкой.
Алгоритм построен так, что требуется проверить лишь знак этой ошибки. На рис.3.1 это иллюстрируется для отрезка в первом октанте, т.е. для отрезка с угловым коэффициентом, лежащим в диапазоне от 0 до 1. Из рисунка можно заметить, что если угловой коэффициент отрезка из точки (0,0) больше, чем 1/2, то пересечение с прямой x = 1 будет расположено ближе к прямой y = 1, чем к прямой y = 0. Следовательно, точка растра (1,1) лучше аппроксимирует ход отрезка, чем точка (1,0). Если угловой коэффициент меньше 1/2, то верно обратное. для углового кэффициента, равного 1/2, нет какого либо предпочтительного выбора. В данном случае алгоритм выбирает точку (1,1).
Рис.3.2. График ошибки в алгоритме Брезенхема.
Так как желательно проверять только знак ошибки, то она первоначально устанавливается равной -1/2. Таким образом, если угловой коэффициент отрезка больше или равен 1/2, то величина ошибки в следующей точке растра с координатами (1,0) может быть вычислена как
e = e + m
где m — угловой коэффициент. В нашем случае при начальном значении ошибки -1/2
e = 1/2 + 3/8 = -1/8
Так как е отрицательно, отрезок пройдет ниже середины пиксела. Следовательно, пиксел на том же самом горизонтальном уровне лучше аппроксимирует положение отрезка, поэтому у не увеличивается. Аналогично вычисляем ошибку
e = -1/8 + 3/8 = 1/4
в следующей точке растра (2,0). Теперь е положительно, значит отрезок пройдет выше средней точки. Растровый элемент (2,1) со следующей по величине координатой у лучше аппроксимирует положение отрезка. Следовательно у увеличивается на 1. Прежде чем рассматривать следующий пиксел, необходимо откорректировать ошибку вычитанием из нее 1. Имеем
e = 1/4 — 1 = -3/4
Заметим, что пересечение вертикальной прямой x = 2 с заданным отрезком лежит на 1/4 ниже прямой у = 1. Еслиже перенести отрезок 1/2 вниз, мы получим как раз величину -3/4. Продолжение вычислений для следующего пиксела дает
e = -3/4 + 3/8 = -3/8
Так как е отрицательно, то у не увеличивается. Из всего сказанного следует, что ошибка — это интервал, отсекаемый по оси у рассматриваемым отрезком в каждом растровом элементе (относительно -1/2).
Приведем алгоритм Брезенхема для первого октанта, т.е. для случая 0 =
Алгоритм Брезенхема разложения в растр отрезка для первого октанта
предполагается, что концы отрезка (x1,y1) и (x2,y2) не совпадают
Integer — функция преобразования в целое
x, y, x, y — целые
е — вещественное
инициализация переменных
Инициализация с поправкой на половину пиксела
е = y/x — 1/2
начало основного цикла
for i = 1 to x
while (e => 0)
e = e + y/x
Блок-схема алгоритма приводится на рис.3.3. Пример приведен ниже.
Рис. 3.3. Блок-схема алгоритма Брезенхема.
Пример 3.1. Алгоритм Брезенхема.
Рассмотрим отрезок проведенный из точки (0,0) в точку (5,5). Разложение отрезка в растр по алгоритму Брезенхема приводит к такому результату:
начальные установки
е = 1 — 1/2 = 1/2
результаты работы пошагового цикла
Результат показан на рис.3.4 и совпадает с ожидаемым. Заметим, что точка растра с координатами (5,5) не активирована. Эту точку можно активировать путем изменения цикла for-next на 0 to x. Активацию точки (0,0) можно устранить, если поставить оператор Plot непосредственно перед строкой next i.
Рис. 3.4. Результат работы алгоритма Брезенхема в первом октанте.
В следующем разделе описан общий алгоритм Брезенхема.
Симистор— разница между оптоизолятором с переходом через нуль и обычным оптоизолятором Симистор
— разница между оптоизолятором с переходом через нуль и обычным оптоизолятором — Обмен электротехнического стекаСеть обмена стеков
Сеть Stack Exchange состоит из 178 сообществ вопросов и ответов, включая Stack Overflow, крупнейшее и пользующееся наибольшим доверием онлайн-сообщество, где разработчики могут учиться, делиться своими знаниями и строить свою карьеру.
Посетить Stack Exchange- 0
- +0
- Авторизоваться Подписаться
Electrical Engineering Stack Exchange — это сайт вопросов и ответов для профессионалов в области электроники и электротехники, студентов и энтузиастов.Регистрация займет всего минуту.
Зарегистрируйтесь, чтобы присоединиться к этому сообществуКто угодно может задать вопрос
Кто угодно может ответить
Лучшие ответы голосуются и поднимаются наверх
Спросил
Просмотрено 17к раз
\ $ \ begingroup \ $Я пытаюсь найти любую документацию о том, для чего нужен оптоизолятор TRIAC с нулевым переходом цепи.Таблицы данных недостаточно хорошо объясняют концепцию. Если вы все же ответите, включите ссылки или объясните, как вы узнали. Спасибо!
Стивенвх1k2020 золотых знаков443443 серебряных знака658658 бронзовых знаков
Создан 04 авг.
Дэниел ДоннеллиДэниел Доннелли20722 золотых знака44 серебряных знака88 бронзовых знаков
\ $ \ endgroup \ $ \ $ \ begingroup \ $Переход через нуль обычно используется для ламп накаливания.Возможно, вы заметили, что когда лампы накаливания выходят из строя, они всегда выходят из строя при включении. Это связано с тем, что при включении фаза сети может быть близка к максимуму. В сочетании с низким сопротивлением холодной лампы это приводит к сильному пику тока, который может сжечь нить накала. Когда вы включаете пересечение нуля, вы избегаете этих пиков.
Как я узнал? Я знаю это с тех пор, как учился в колледже. Это просто имеет смысл.
Создан 04 авг.
Stevenvhstevenvh1k2020 золотых знаков443443 серебряных знака658658 бронзовых знаков
\ $ \ endgroup \ $ 3 \ $ \ begingroup \ $Пересечение нуля относится к напряжению нагрузки, при котором будет переключаться симистор.
В Википедии есть небольшая информация по теории пересечения нуля.
Обычно симистор будет удерживать свое переключение до тех пор, пока переменная форма сигнала нагрузки не пересечет «нулевую» или среднюю точку формы волны. Это помогает смягчить внезапные скачки напряжения, когда коммутируемая нагрузка перескакивает с 0 В на 100 В. Обеспечивая переключение нагрузки только тогда, когда форма волны пересекает среднюю точку, повышение напряжения будет плавным от 0 до максимума.
Создан 04 авг.
Майенко1,977 золотых знаков100100 серебряных знаков178178 бронзовых знаков
\ $ \ endgroup \ $ \ $ \ begingroup \ $Согласно моим исследованиям, детектор перехода через ноль используется специально для защиты подключенной нагрузки.Совершенно неважно, с симистором он или напрямую с сетью. Как упоминалось в одном из ответов выше, нагрузка может быть наиболее уязвимой при появлении внезапного пикового уровня фазы переменного тока во время включения питания, датчик перехода через нуль гарантирует, что нагрузка всегда включается при первом переходе через нуль. фаза переменного тока, что защищает нагрузку от опасных пиковых уровней.
С симисторами переход через нуль может быть полезен для защиты нагрузок, а также для уменьшения радиопомех.
Я попытался всесторонне объяснить концепцию в следующей статье
Как сделать схему детектора перехода через ноль
Создан 04 авг.
\ $ \ endgroup \ $ Электротехнический стек Exchange лучше всего работает с включенным JavaScriptВаша конфиденциальность
Нажимая «Принять все файлы cookie», вы соглашаетесь с тем, что Stack Exchange может хранить файлы cookie на вашем устройстве и раскрывать информацию в соответствии с нашей Политикой в отношении файлов cookie.
Принимать все файлы cookie Настроить параметры
Улучшенные детекторы перехода через ноль переменного тока для Arduino
Фиг.1 Arduino с детектором перехода через ноль для управления питанием переменного тока.
, автор: Lewis Loflin
В течение нескольких лет я размещал средства управления питанием переменного тока на базе Arduino. Идея заключалась в том, что прерывание от детектора перехода через ноль будет использоваться с программой задержки для запуска схемы симистора. Считывая значение потенциометра, Arduino вычисляет задержку на каждом полупериоде переменного тока от 0 до 8,33 миллисекунды. Чем больше задержка, тем меньше мощности передается на нагрузку. См. Рис. 1 и следующие ссылки.
Цель состоит в том, чтобы создать лучший детектор перехода через ноль.В то время как оптопары на выходе транзистора работают, несколько искаженный импульс запуска может вызвать проблемы.
Рис. 2 Полноволновый выпрямленный переменный ток в пульсирующий постоянный ток.
Рис. 2 иллюстрирует пульсирующий вход постоянного тока для светодиода (ей) оптопары.
Рис. 3 Детектор пересечения нулевого уровня переменного тока, улучшенный с помощью триггерных инверторов Шмитта SN74LS14.
На рис. 3 показаны полноволновый мостовой выпрямитель и типовой оптрон 4N24. Здесь я добавил два триггерных инвертора Шмитта SN74LS14.Это дает два чистых выходных импульса на TP2 и TP3.
Рис. 4 Детектор пересечения нулевого уровня переменного тока, улучшенный с помощью сигналов триггера Шмитта SN74LS14.
На рис. 4 показаны формы выходных сигналов моего ПК-осциллографа. TP2 показывает плохую форму сигнала от цепи коллектора транзистора. TP3 показывает чистый импульс от высокого к низкому с рабочим циклом около 7%.
TP4 у нас есть импульс от низкого к высокому с периодом 7%. Все они 120 Гц с периодом 8,33 мс.
Фиг.5 Детектор пересечения нуля переменного тока с использованием оптопары h21L1.
На рис. 5 я заменил триггерные инверторы Шмитта SN74LS14 и оптопару 4N25 на одну схему оптопары h21L1. Контакт 4 — это выход с открытым стоком и подтягивающим резистором. H21L1 имеет внутренний триггер Шмитта и детекторную схему. Диапазон напряжения на выходе от 3 до 16 вольт.
Чтобы процитировать спецификацию:
«h21L1 и h21L2 имеют инфракрасный светодиод арсенида галлия, оптически связанный с высокоскоростным интегрированным детектором с выходом триггера Шмитта.Разработан для приложений, требующих гальванической развязки, малого времени отклика, помехоустойчивости и совместимости с цифровой логикой ».
Рис. 6 Детектор пересечения нулевого переменного тока с использованием формы сигнала оптопары h21L1.
На рис. 6 показан чистый выходной импульс с вывода 4. Рабочий цикл составляет около 7%, частота составляет 120 Гц, а период — 8,33 миллисекунды.
Рис. 7 Форма полуволнового пульсирующего сигнала постоянного тока.
Это полуволновой пульсирующий постоянный ток. Это 60 Гц с периодом 16.7 миллисекунд.
Рис. 8 Выходной сигнал полуволны h21L1 с пересечением нуля.
Наконец вывод h21L1. Это дает прямоугольную волну 60 Гц с рабочим циклом 54%. Я бы не стал использовать это для управления мощностью, но обнаружение спада или повышения крутизны работает нормально.
Рис. 9 еще одна цепь перехода через нуль h21L1.
Другие схемы
Что такое детектор пересечения нуля, детектор пересечения нуля с использованием рабочего усилителя
Детектор пересечения нуля определяет, сколько раз входной сигнал пересекал нулевое значение или нулевой уровень напряжения .Детектор пересечения нуля — это, по сути, схема компаратора, которая сравнивает входной синусоидальный сигнал или сигнал синусоидальной волны с нулевым уровнем напряжения. Другими словами, мы можем сказать, что он обнаруживает изменение напряжения с положительного уровня на отрицательный уровень и с отрицательного уровня на положительный уровень. Выходной сигнал детектора перехода через нуль изменяется, когда входное напряжение пересекает нулевой уровень до высокого или высокого до нуля.
Детектор пересечения нуля сравнивает входной сигнал с нулевым опорным напряжением (V ref ).Он изменяет выходной сигнал либо + V sat , либо –V sat , переключаясь с LOW на HIGH или наоборот. Когда вход пересекает нулевое опорное напряжение. когда сигнал входного напряжения даже немного выше или ниже 0 В, выход быстро изменится. Детектор перехода через нуль может быть изготовлен с использованием операционного усилителя общего назначения, оптрона или транзисторов.
Схема детектора пересечения нуля с ОУ LM741
Неинвертирующий детектор пересечения нуля
Если на инвертирующей входной клемме установлено нулевое опорное напряжение, это означает, что инвертирующая клемма заземлена и входной сигнал подается на НЕинвертирующую клемму.+ Vcc подключены к контакту 7, а -VEE — к контакту 4, 6 — это выходной контакт и нагрузочный резистор RL, подключенный к выходу на землю, даже небольшое количество входного напряжения выше нуля (опорное напряжение), затем выход будет ВЫСОКАЯ. Когда вход продолжает увеличиваться от нуля до положительного, выходное напряжение переходит в положительное насыщение.
Детектор пересечения нуля также называется преобразователь синусоидального сигнала в прямоугольный
Этот выход называется + V s aturation .
Инвертирующий детектор нулевого пересечения
Если входное напряжение подается на инвертирующий терминал, а опорное напряжение подается на НЕинвертирующий терминал или неинвертирующий терминал заземлен, когда даже небольшое количество входного напряжения выше нуля вольт, выход переключится на НИЗКИЙ. Когда входной сигнал увеличивается от нуля до положительного, выходное напряжение переходит в состояние отрицательного насыщения.
И этот НИЗКИЙ выход называется –V насыщенность .
В схеме детектора перехода через нуль с использованием оптопары мы использовали 1 двухполупериодный выпрямитель и положительный источник постоянного тока мостового выпрямителя, подключенный к катодному выводу входа оптопары.Выход соединен с коллекторным штырем оптопары. Здесь используется двухполупериодный мостовой выпрямитель без фильтрующего конденсатора. Вывод эмиттера оптопары соединен с землей постоянного тока. VCC соединен с коллекторным штифтом. Резистор, подключенный к коллектору, также называется подтягивающим резистором.
- ZCD как фазометр
- ZCD как генератор временных меток
- Контроллеры питания переменного тока
- Регулятор скорости асинхронного двигателя и устройства плавного пуска
- Управление углом включения тиристора с помощью Arduino и т. Д.
Также читайте
MOC3041 Техническое описание оптопары, расположение выводов, характеристики и аналоги
MOC3021 — это оптрон с приводом от симистора с нулевым переходом.Это означает, что внутри него находится инфракрасный светоизлучающий диод (LED) в сочетании с TRIAC. Когда загорается светодиод, включается и TRIAC.
MOC3021 Конфигурация контактов
|
Номер контакта |
Имя контакта |
Описание |
|
1 |
Анод (А) |
Анодный вывод ИК-светодиода.Подключен к логическому входу |
|
2 |
Катод (C) |
Катодный вывод ИК-светодиода |
|
3 |
NC |
Нет соединения — не может использоваться |
|
4 |
Главный терминал симистора 1 |
Один конец симистора, который присутствует внутри IC |
|
5 |
NC |
Нет соединения — не может использоваться |
|
6 |
Главный терминал симистора 2 |
Другой конец симистора, который присутствует внутри IC |
MOC3041 Характеристики и характеристики
- Оптоизолятор с драйвером симистора с нулевым переходом
- Входное прямое напряжение светодиода: 1.3В
- Ток срабатывания светодиода в прямом направлении: 15 мА
- Напряжение на выходе TRIAC: 400 В (макс.)
- Пиковый выходной ток TRIAC: 1A
- Доступен как 6-контактный PDIP с суффиксом M и без него
Примечание: Более подробную информацию можно найти в таблице данных MOC3041, которую можно загрузить в конце этой страницы.
Эквивалент MOC3041: MOC3021 (совместимость по выводам)
Альтернативы Оптопары: MCT2E (ненулевой транзистор), FOD3180 (высокоскоростной полевой МОП-транзистор), 6N137 (высокоскоростной NAND), 4N25
MOC3041 Введение
Оптоизолятор, такой как MOC3041, обычно используется для управления другим внешним переключающим устройством, таким как TRIAC, MOSFET или SCR, которые, в свою очередь, будут управлять нагрузкой переменного или постоянного тока.TRIAC, присутствующий внутри MOC3041, может обеспечивать пиковый ток до 1 А, что достаточно для срабатывания внешнего переключателя. Сам по себе TRIAC не следует использовать для переключения нагрузок без внешнего переключателя.
Поскольку MOC3041 имеет встроенный детектор перехода через нуль, он в основном используется для переключения нагрузок переменного тока. Детектор пересечения нуля будет отслеживать 0 В в выходной синусоидальной волне и включать внутренний TRIAC только при 0 В. Таким образом, НАГРУЗКА не будет подвергаться пиковому напряжению при переключении.
MOC3041 для коммутации нагрузок переменного тока
MOC3041 обычно используется для управления скоростью двигателя переменного тока, диммеров света или других приложений домашней автоматизации, где задействована нагрузка переменного тока. Типовая принципиальная схема приложения для управления нагрузкой переменного тока с помощью микроконтроллера показана ниже
.
Внутренний ИК-светодиод подключается между контактом 1 и контактом 2. Источник напряжения Vcc должен обеспечивать подачу 15 мА через резистор Rin на контакт анода светодиода.Логический элемент И-НЕ соединяет катодный вывод светодиода с землей на основе сигнала ШИМ от микроконтроллера. Таким образом, один входной вывод логического элемента И-НЕ будет подключен к земле, а другой — к сигналу ШИМ.
На основании сигнала ШИМ светодиод будет включаться с определенным интервалом, в течение которого также будет включен внутренний TRIAC. Когда внутренний TRIAC включен, он переключает внешний TRIAC, который, в свою очередь, управляет нагрузкой переменного тока. Резистор на 39 Ом и конденсаторы 0,01 мкФ образуют дополнительную демпферную цепь.Таким образом, в зависимости от рабочего цикла ШИМ выходное напряжение также будет изменяться, что позволяет нам контролировать скорость интенсивности нагрузки.
Приложения
- Диммеры переменного тока
- Управление контактором / реле
- Контроль скорости двигателя переменного тока
- Цепи шумовой связи
- Управление нагрузками переменного тока с помощью MCU / MPU
- Регулятор мощности переменного / постоянного тока
- Управление соленоидом / клапаном
2D-Модель
120VAC 60Hz Детектор нулевого перехода
Почему бы не использовать оптопару? Vishay SFH6206 имеет два встречно-параллельных светодиода, поэтому он работает в течение полного цикла напряжения сети.Если входное напряжение достаточно высокое, выходной транзистор включен, а коллектор находится на низком уровне. Однако около точки перехода через нуль входное напряжение слишком низкое, чтобы активировать выходной транзистор, и его коллектор будет вытянут высоко. Таким образом, вы получаете положительный импульс при каждом пересечении нуля.
Наиболее важным параметром оптопары должен быть ее CTR или коэффициент передачи тока, который дает вам соотношение между выходным током и входным током.Вы можете сравнить это с \ $ H_ {FE} \ $ обычного BJT. Но в то время как \ $ H_ {FE} \ $ для транзистора с малым сигналом часто превышает 100, CTR низкий. Настолько низкий, что выражается в%, например, 20%. Это не 20, это 0,2.
CTR 0,2 означает, что вам нужно управлять входными светодиодами с током 1 мА, чтобы получить всего 200 \ $ \ mu \ $ A. Обычно это не проблема, поскольку выход часто используется только для получения логического уровня, который подключается к входу с высоким импедансом. В этом случае можно использовать подтягивающий резистор высокого номинала, например> 27k \ $ \ Omega \ $ в системе 5V.Тогда 200 \ $ \ mu \ $ A достаточно, чтобы снизить выход.
Подробные расчеты можно найти здесь.
Некоторое время назад я создал то же самое … диммер с использованием симистора с таймингами, рассчитанными по сигналу пересечения нуля, отправляемому на вывод прерывания на pic16f877a.
Я взял сигнал пересечения нуля с блока питания, который питает схему, прежде чем он сгладится и отрегулирован. Есть несколько компонентов, позволяющих преобразовать выпрямленные горбы переменного тока в очень короткие импульсы +5 В с силой около 200 мкс.Большую часть времени транзистор (обозначенный как Q на диаграмме) проводит ток, подтягивая вывод RB0 / INT к низкому уровню, но когда переменный ток на короткое время падает ниже 4,7 В, он перестает проводить, и сигнал подтягивается к высокому уровню резистором R.
Импульс сосредоточен вокруг точки пересечения нуля и должен быть достаточно коротким, чтобы приблизительно определить момент пересечения нуля. Но вы можете точно настроить это в программном обеспечении, сначала обнаружив нарастающий фронт импульса, затем рассчитав время спада, затем разделив его пополам и добавив этот период времени к следующему нарастающему фронту… это даст вам точное пересечение нуля.
Детекторы перехода через ноль — эффективная защита чувствительного электронного оборудования
Как системы управления мощностью выдерживают высокие пусковые токи? Это похоже на трудную задачу. Тем не менее, здесь пригодятся детекторы перехода через нуль (ZCD).
При обнаружении перехода через ноль переход формы сигнала будет происходить плавно. Следовательно, схема детектора пересечения важна для систем, требующих определенного временного интервала.
Мы подробно расскажем, как работают детекторы перехода через нуль. Также мы объясним простые методы создания схемы детектора пересечения. Итак, читайте дальше.
1. Принцип детекторов нулевого пересечения
Извещатель перехода через нуль работает в схемной сети систем управления электроэнергией. Это облегчает преобразование формы выходного сигнала компаратора. Это происходит, когда сигнал переменного тока достигает нулевого опорного напряжения. Следовательно, устройство задерживается по времени.Цель состоит в том, чтобы защитить схему от высоких входных сигнальных токов.
2. Описание схемы базовых детекторов перехода через ноль
Во-первых, вот иллюстрация схемы детектора перехода через ноль.
Рисунок 1: Иллюстрация принципиальной схемы детектора перехода через нуль.
На приведенной выше иллюстрации последовательной цепи показана простая схема детектора пересечения. Во время сборки подключите входной сигнал к инвертирующей клемме операционного усилителя.Для неинвертирующего терминала заземлите его через входные резисторы.
Устройство определяет, когда входной сигнал отличается от опорного напряжения. Вы должны установить опорное напряжение на 0. Следовательно, каждый раз, когда это происходит, уровень насыщения выходных сигналов будет смещаться.
Рисунок 2: Печатная плата
Подайте входной сигнал на неинвертирующую клемму операционного усилителя. В этом случае опорный уровень напряжения равен нулю.Система сравнивает синусоидальную волну на входе операционного усилителя с опорным напряжением.
Каждый раз фаза синусоидальной волны будет сдвигаться с отрицательной на положительную и наоборот.
Рассмотрим каждый вероятный сценарий входного сигнала.
Возьмем, к примеру, случай, когда на входе присутствует положительный синусоидальный сигнал. Компаратор сравнивает входной сигнал с уровнем опорного напряжения. Следовательно, уравнение этого сценария:
В Выход = В Ссылка — В Входной сигнал
Следовательно, учитывая, что у вас есть опорное напряжение 0 В, мы можем приравнять V Reference к нулю.Таким образом, уравнение изменится на:
В Выход = 0 — В Входной сигнал
Следовательно, напряжение выходного сигнала формы волны будет иметь отрицательное насыщение. Проверьте это последнее уравнение:
В Выход = — В Входной сигнал
Следовательно, положительный импульс дает отрицательную форму выходного сигнала.
С другой стороны, рассмотрим сценарий, когда имеется отрицательный синусоидальный сигнал.Опять же, компаратор сравнит входной сигнал с уровнем опорного напряжения.
Следовательно, уравнение снова будет иметь вид V Output = V Reference –V Input Signal.
Когда мы заменим = V Ссылку в уравнении на ноль, мы получим
В Выход = 0 — (Входной сигнал В )
Таким образом, V Выход = + V Входной сигнал
В этом случае выходной сигнал будет иметь положительное насыщение.
Следовательно, детектор перехода через ноль эффективно преобразует входной сигнал в выходной сигнал противоположного знака. Если входной сигнал отрицательный, перекрестная схема преобразует его в положительный и наоборот.
3.Как сделать схему детектора перехода через нуль?
Рисунок 3: Синусоидальные волны
Вы можете легко сконструировать детектор перехода через нуль. Кроме того, вы можете использовать эту схему для широкого круга приложений.
Вот компоненты, которые вам понадобятся для этой схемы:
Стабилитрон 6 В
Два резистора 100 кОм
IC 741 Компаратор
Убедитесь, что вы подключаете входной переменный ток от мостового выпрямителя.Также в этой схеме IC 741 работает как компаратор. Следует обеспечить напряжение питания 12 В.
Также убедитесь, что вы подключили неинвертирующий контакт к диоду 1N4148. С другой стороны, вы должны подключить инвертирующий контакт к выбранному входному сигналу.
Обратите внимание, что форма выходного сигнала вашей схемы будет обратной входному сигналу. Таким образом, схема следует принципам обычных детекторов перехода через нуль.
Когда на входном контакте есть положительный ток, устройство обнаружит это.Изменение формы выходного сигнала произойдет, когда опорное напряжение будет равно нулю. Обратное произойдет, когда вы подключите встречный ток. В этом случае выход будет положительным.
4. Применение детектора перехода через нуль
Существует широкий спектр применений схем детекторов перехода через ноль. Вы найдете их в электронном устройстве, например, в частотомере. Кроме того, вы также найдете их в силовых электронных схемах.
Рисунок 4: Трехмерное изображение электронных компонентов
Вот некоторые из типичных применений перекрестной цепи:
ZCD как фазометр
Когда у вас есть два напряжения, вы можете использовать ZCD в качестве фазометра для определения фазового угла.ZCD сначала будет получать последовательные импульсы в положительном и отрицательном циклах. Затем он будет измерять напряжение во временном интервале первого синусоидального импульса напряжения. Он повторит процесс для другого импульса напряжения синусоидальной волны.
Таким образом, интервал времени даст разность фаз между напряжениями входного сигнала. Вы можете использовать фазомер для синусоидальных волн от нуля до 360 градусов.
ZCD как генератор временных меток
Рассмотрим принципиальную схему компаратора детектора перехода через ноль на рисунке 1.Если входной вывод представляет собой синусоидальную волну, выходной сигнал будет генератором прямоугольной волны. Таким образом, будет создана последовательная цепь.
Также рассмотрите сценарий, когда постоянная времени относительно мала по сравнению с периодом. В таком случае напряжение на резисторах может быть положительным импульсом. Также это может быть отрицательный импульс. Подайте напряжение на цепь ограничителя через диод. Он выдает напряжение нагрузки только с положительными импульсами. Следовательно, у вас будет преобразование синусоидальной волны детектора перехода через ноль в положительные импульсы.Предпосылкой для этого результата является сетевая схема и схема ограничителя.
Детектор перехода через ноль с использованием микросхемы 311 и транзистора
Рисунок 5: Волновая графика
Вы также можете использовать детектор перехода через нуль в схему компаратора операционного усилителя. Мы проиллюстрировали это прямое применение на рисунке 1. Когда вы используете его таким образом, это будет преобразователь прямоугольных сигналов.
Кроме того, в этой схеме вы можете использовать инвертирующий или неинвертирующий компаратор в качестве детектора перехода через ноль.Тем не менее, вы должны убедиться, что вы установили опорное напряжение на ноль.
Принцип работы этой схемы аналогичен принципу работы других детекторов перехода через нуль.
Таким образом, когда положительное входное напряжение пересекает ноль, выходной сигнал будет иметь отрицательное насыщение. С другой стороны, когда входное напряжение отрицательное, выходной сигнал будет иметь положительное насыщение.
Следовательно, отрицательные циклы на входе волны будут давать положительные формы волны.Точно так же положительные циклы на входе волны будут давать отрицательные формы волны.
Детектор перехода через ноль с оптопарой
Другой способ использования детектора перехода через ноль — это разработка оптопары. Вот иллюстрация оптрона аналоговой конструкции.
Рисунок 6: Иллюстрация оптопары
Если посмотреть на форму выходного сигнала схемы, она меняется в зависимости от входа. Например, когда входной сигнал достигает 0, форма выходного сигнала будет расти.Это происходит каждый раз, когда входной сигнал достигает этой точки, как показано в приведенных выше примерах.
Заключение
Короче говоря, детекторы перехода через ноль необходимы в системах управления питанием. Без них можно было бы работать в цепях переменного тока.
У нас есть и другие мнения о других типах цепей. Посетите наш сайт для получения дополнительной информации о схемах. Кроме того, не стесняйтесь обращаться к нам в случае возникновения каких-либо вопросов.
Зачем коммутатору требуется обнаружение перехода через ноль? С кодом
ед. Опыта
- При выполнении проектов в предыдущих компаниях часто использовались интеллектуальные коммутаторы.В частности, тиристор с одним проводом под напряжением используется для управления проводимостью цепи, а также будет использоваться схема перехода через ноль. Однако другие переключатели с нулевым током под напряжением и переключатели с одиночным проводом под напряжением с магнитным удержанием не предназначены для использования в цепи перехода через нуль. Слепо верю, что только SCR должны достичь нулевого перехода.
- Затем, когда я пошел в новую компанию на собеседование, технический интервьюер спросил меня, установлен ли на ноль умный переключатель, который я разработал ранее? Одиночный провод под напряжением, провод без напряжения, реле, SCR? Когда я сказал, что тиристору нужно пересечь ноль, меня безжалостно ударили огромные знания начальника.Оказывается, будь то постоянный или переменный ток, при отключении механического переключателя главной цепи управления в целях безопасности требуется обнаружение перехода через ноль.
- На самом деле, в настоящее время возникает неизбежный вопрос, зачем нам нужно обнаружение перехода через нуль? Какова цель перехода через нуль? Что толку?
Почему обнаружение перехода через нуль?
- Потому что на самом деле, будь то постоянный ток или переменный ток, пока механический переключатель главной цепи управления отключен, на контактах можно увидеть электрические искры, сопровождающиеся нагревом.
- Перед отключением главной цепи, чем больше проходит ток, тем серьезнее электрическая искра между статическим и подвижным контактами. Это явление называется дугой.
- Дуга возникает в основном между механическими контактами, когда прерывается большой ток. Это вызовет коррозию и повреждение контактов на долгое время и может вызвать пожар или взрыв, что серьезно угрожает безопасности производства и имущества.
- Частоту также можно измерить.Обнаружение перехода через ноль часто используется на двигателе.
Схема обнаружения перехода через нуль
- Вообще говоря, схема обнаружения перехода через ноль использует две схемы: резистивный делитель на ОУ или изоляция оптопары.
- Давайте проанализируем приведенную ниже схему развязки оптопары. Поскольку переменный ток является направленным, мы можем преобразовать его в пульсирующий постоянный ток через выпрямительный мост, а затем вывести нулевой сигнал после изоляции оптопарой.Здесь используется схема выпрямительного моста для разработки схемы обнаружения перехода через ноль, принципиальная схема показана на рисунке ниже.
- Поскольку переменный ток выпрямляется выпрямительным мостом, отрицательный полупериод переменного тока меняется на положительный. Следовательно, оптопара может быть включена в местах, отличных от пересечения нуля, и оптопара отключается около нулевой точки. Выходная клемма оптопары подключена к подтягивающему резистору.Анализ формы сигнала выглядит следующим образом:
- Положительный полупериод: светодиод оптопары включен, выходная клемма включена, выходной сигнал низкий;
- Отрицательный полупериод: светоизлучающий диод оптопары включен, выходная клемма включена, выходной сигнал низкий;
- Около нулевой точки: светодиод оптопары отключен, выходной конец отключен, выходной сигнал высокий.
- Из приведенного выше сигнала видно, что MCU может определять приближение нулевой точки, пока он обнаруживает высокий уровень.В это время, пока катушка контактора / реле управляется, контакт может гарантированно размыкаться, когда нулевой переменный ток является наименьшим, тем самым подавляя возникновение дуги.
Код обнаружения перехода через ноль
void Nopt (uint8 T_Dly)
{
пока (T_Dly--);
возвращение ;
}
uint8 ReadZer0Pin (uint8 InValue)
{
uint8 Tcon = 0;
uint8 i;
for (i = InValue; i> 0; i--)
{
Nopt (2);
если (P_ZER0 == 1)
{
Tcon ++;
}
}
если (Tcon> ((InValue >> 1) + 1))
{
возврат 1;
}
еще
{
возврат 0;
}
}
void ReadZ0 (недействительно)
{
в то время как (1)
{
если ((! ReadZer0Pin (5)) && F_PZL)
{
F_PZL = 0;
перерыв ;
}
иначе, если ((ReadZer0Pin (5)) && (! F_PZL))
{
F_PZL = 1;
перерыв ;
}
}
}
void main (пусто)
{
в то время как (1)
{
ReadZ0 ();
CmdKey ();
CmdDisplay ();
..
.
}
}
подвести итог
- Схема обнаружения перехода через ноль является вспомогательным средством для подавления дуги. Он сообщает процессору о достижении нулевой точки в основном контуре управления, и процессор отключает основной контур в нулевой точке с наименьшим током во времени, чтобы предотвратить возникновение дуг до максимума. Но эта схема подходит только для цепей переменного тока, а не для цепей постоянного тока. В настоящее время не существует очень эффективных средств устранения дуги в контуре управления постоянным током, и он по-прежнему полагается на такие методы, как магнитная продувка, камера гашения дуги, сетка для гашения дуги и заполнение инертным газом.
