Что такое драйвер шагового двигателя. Как работает драйвер шагового двигателя. Какие бывают типы драйверов шаговых двигателей. Как выбрать подходящий драйвер для шагового двигателя. Какие преимущества дает использование драйвера шагового двигателя.
Что такое драйвер шагового двигателя и зачем он нужен
Драйвер шагового двигателя — это электронное устройство, которое управляет работой шагового двигателя. Основная задача драйвера — преобразовывать управляющие сигналы низкого напряжения в силовые импульсы, необходимые для вращения вала шагового двигателя.
Использование драйвера позволяет решить несколько важных задач:
- Обеспечить необходимый ток и напряжение для обмоток двигателя
- Сформировать правильную последовательность импульсов для вращения вала
- Реализовать микрошаговый режим для повышения точности позиционирования
- Защитить двигатель от перегрузок и короткого замыкания
- Упростить управление двигателем со стороны контроллера
Без драйвера напрямую управлять шаговым двигателем крайне сложно и неэффективно. Поэтому драйвер является обязательным компонентом в системах с шаговыми двигателями.
Принцип работы драйвера шагового двигателя
Работа драйвера шагового двигателя основана на следующих принципах:
- Получение управляющих сигналов от контроллера (обычно это сигналы STEP и DIR)
- Преобразование сигналов в последовательность импульсов для обмоток двигателя
- Коммутация обмоток с помощью силовых ключей (транзисторов)
- Формирование тока необходимой величины и формы в обмотках
- Обеспечение плавности вращения за счет микрошагового режима
При получении сигнала STEP драйвер формирует импульс тока в соответствующих обмотках двигателя. Сигнал DIR определяет направление вращения. Внутренняя логика драйвера обеспечивает правильную последовательность коммутации обмоток для непрерывного вращения ротора.
Основные типы драйверов шаговых двигателей
Существует несколько основных типов драйверов шаговых двигателей:
1. Биполярные драйверы
Используются для управления биполярными шаговыми двигателями. Обеспечивают протекание тока в обмотках в обоих направлениях. Имеют более сложную схемотехнику, но обеспечивают лучшие характеристики.
2. Униполярные драйверы
Применяются для униполярных шаговых двигателей. Ток в обмотках протекает только в одном направлении. Более простые схемотехнически, но уступают биполярным по эффективности.
3. Драйверы с постоянным током
Поддерживают заданный ток в обмотках независимо от скорости вращения. Обеспечивают максимальный момент во всем диапазоне скоростей.
4. Драйверы с синусоидальным током
Формируют синусоидальную форму тока в обмотках. Позволяют добиться более плавного вращения и снизить вибрации двигателя.
Ключевые характеристики драйверов шаговых двигателей
При выборе драйвера шагового двигателя необходимо учитывать следующие основные характеристики:
- Максимальный рабочий ток
- Напряжение питания
- Поддерживаемые режимы микрошага
- Интерфейс управления
- Функции защиты
- Габариты и способ монтажа
Правильный подбор драйвера под конкретный двигатель и задачу позволяет добиться оптимальных характеристик системы.
Микрошаговый режим работы драйвера
Микрошаговый режим — важная функция современных драйверов шаговых двигателей. Он позволяет разделить полный шаг двигателя на более мелкие микрошаги.
Преимущества микрошагового режима:
- Повышение точности позиционирования
- Снижение вибраций и шума при работе
- Увеличение плавности вращения на малых скоростях
- Возможность работы на сверхнизких скоростях
Типичные режимы микрошага: 1/2, 1/4, 1/8, 1/16, 1/32 шага. Некоторые драйверы поддерживают режимы до 1/256 шага.
Особенности управления шаговым двигателем через драйвер
Управление шаговым двигателем через драйвер обычно осуществляется с помощью следующих сигналов:
- STEP — каждый импульс вызывает поворот вала на один шаг или микрошаг
- DIR — задает направление вращения (по часовой стрелке или против)
- ENABLE — включает/выключает обмотки двигателя
- MS1, MS2, MS3 — устанавливают режим микрошага
Такой интерфейс позволяет легко управлять двигателем с помощью микроконтроллера или специализированного контроллера движения.
Защитные функции драйверов шаговых двигателей
Современные драйверы шаговых двигателей обычно оснащаются различными защитными функциями:
- Защита от перегрева
- Защита от короткого замыкания
- Защита от перенапряжения
- Защита от обрыва фазы двигателя
- Защита от неправильного подключения двигателя
Эти функции повышают надежность работы системы и предотвращают выход из строя двигателя и самого драйвера при нештатных ситуациях.
Выбор драйвера для конкретного шагового двигателя
При выборе драйвера для конкретного шагового двигателя необходимо учитывать следующие факторы:
- Тип двигателя (биполярный или униполярный)
- Номинальный ток обмоток двигателя
- Индуктивность обмоток
- Требуемый крутящий момент
- Необходимый диапазон скоростей
- Требования к точности позиционирования
Важно, чтобы характеристики драйвера соответствовали параметрам двигателя и требованиям конкретной задачи. Это позволит добиться оптимальной производительности системы.
Преимущества использования драйверов шаговых двигателей
Использование специализированных драйверов для управления шаговыми двигателями дает ряд существенных преимуществ:
- Простота управления двигателем со стороны контроллера
- Повышение энергоэффективности системы
- Улучшение динамических характеристик двигателя
- Снижение вибраций и акустического шума
- Возможность точного позиционирования
- Защита двигателя от перегрузок и повреждений
Все это делает применение драйверов практически обязательным в современных системах с шаговыми двигателями.
Драйверы и контроллеры шагового двигателя
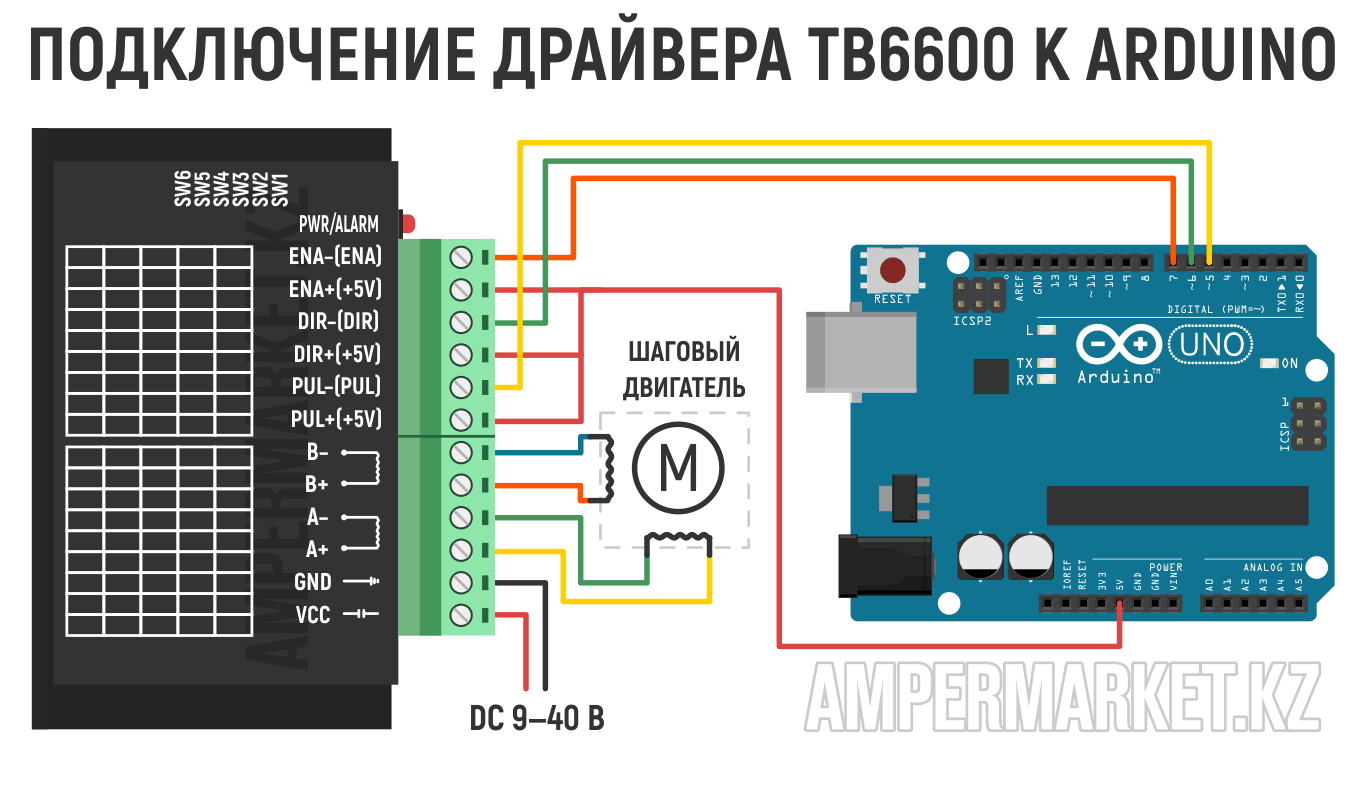
Для управления приводами требуется специальный драйвер шагового двигателяДрайвер представляет собой силовую часть со встроенным простейшим интерфейсом, основанным на комбинации ШАГ–НАПРАВЛЕНИЕ.
Драйвер шагового двигателя еще и усилитель мощности, который преобразует импульсы, получаемые от источника электрического тока, в перемещение вала. При этом каждый импульс вызывает перемещение вала на 1 шаг (или на 1 микрошаг).
Драйвер шагового двигателя снабжён специальной схемой, которая служит для выполнения трёх основных задач:
- Включать и выключать ток в обмотках, а также менять его направление. При выполнении этой задачи системы управления электроприводом работают без сбоев.
- Поддерживать заданное значение тока.
- Обеспечивать как можно более быстрое нарастание и спад тока для достижения требуемых скоростных характеристик. Скоростные характеристики в свою очередь качественным образом влияют на управление шаговым двигателем.
Драйверы подразделяются на несколько типов, каждый из которых определяет мощность вала двигателя.
Следует отметить, что современные технологии, по которым изготавливается привод шагового двигателя, постоянно совершенствуются. Смысл совершенствования в том, чтобы обеспечить получение наибольшего момента на валу при минимальных габаритах двигателя, широких скоростных возможностях, высокого КПД и улучшенной точности. Важным звеном этой технологии является применение микрошагового режима.
Кроме того, одной из основных деталей является контроллер управления шаговым двигателем. Как правило, контроллеры для шагового двигателя изготавливаются на базе промышленных микроконтроллеров и могут быть как программными, так и аппаратными. Программные контроллеры для шагового двигателя применяются тогда, когда круг решаемых ими задач небольшой. Цена такого программного контроллера намного ниже аппаратного.
Контроллеры для шагового двигателя могут предназначаться как для униполярных двигателей, так и для двигателей других типов. При этом средний ток обмотки может достигать 2,5 А.
Контроллер шагового двигателя представляет собой комплект из силовой части (драйвер) и устройство, расширяющее возможности управления двигателем (интеллектуальная часть).
Данный компонент шагового двигателя обладает рядом достоинств. Прежде всего, контроллер управления шаговым двигателем имеет возможность передавать сигналы ШАГ–НАПРАВЛЕНИЕ.
Преимущества использования контроллеров для шагового двигателя:
- Возможность подключения к компьютеру. В зависимости от модели и конструкции контроллер управления шаговым двигателем подключается к компьютеру и регулируется с его помощью.
- Многократное перепрограммирование. В настоящее время достаточно купить только один контроллер шагового двигателя. При этом при переориентации производства или расширении перечня задач его можно перепрограммировать для выполнения новых функций.
- Широкий модельный ряд контроллеров как отечественных, так и зарубежных производителей позволяет купить контроллер шагового двигателя с расширенными функциями. Контроллеры с расширенными функциями имеют в своем составе программируемый логический контроллер (привод работает в автономном режиме по записанной в него программе, это позволяет получить готовое устройство для выполнения определённого технологического процесса на основе одного только контроллера шагового двигателя).
Устройство управления электроприводом, оснащенное контроллером, решает следующие задачи:
- Достижение высокой точности. Это связано с конструкцией, благодаря которой устройства управления шаговыми двигателями делают до 20000 шагов за оборот за счет микрошага.
- Работа с программным обеспечением. К ним относятся производственные программы типа Kcam и Mach.
- Работа в различных режимах.
Устройства управления шаговыми двигателями могут функционировать как on-line (то есть подчиняясь командам компьютера) так и off-line (при помощи программы с внешнего устройства, например, флеш-накопителя). Применяется также совмещённый режим (он особенно выгоден при управлении одинаковыми процессами с меняющимися параметрами, управлении контрольными процедурами и опросе параметров, осуществляемом с вашего компьютера)
Блок управления шаговым двигателем.
Вместе с шаговым двигателем работает блок управления шаговым двигателем, который является источником тока для двигателя, осуществляет при необходимости дробление основного углового шага и выполняет коммутацию фаз двигателя. Блок управления обычно поддерживает как ручное, так и автоматическое управление электроприводами.
Современный блок управления электроприводом одновременно является и многофункциональным устройством – с возможностью программирования и синхронизации с другими устройствами, а также с возможностью включить автоматическое управление электроприводами. Существуют решения, при которых блок управления электроприводом программируемый.
В частности, блок управления шаговым двигателем может управляться с помощью компьютера. Подключение происходит через LPT-порт (в том числе и с программами для станков с ЧПУ), через COM-порт – получая специальные команды для определения характера (и алгоритма) движения шагового двигателя, в автономном автоматическом режиме без помощи компьютера или внешнего контроллера (если требуется автоматическое управление электроприводами технологических процессов) или в ручном режиме, когда скорость движения регулируется потенциометром, а направление движения – датчиком реверса.
Учитывая разнообразие шаговых двигателей, их управление зависит от типа самого двигателя. И в соответствии с этим и выбирается блок управления электроприводом.
Биполярный привод шагового двигателя и его управление.
Помимо биполярных двигателей существуют так же униполярные двигатели, обмотки которых имеют средние отводы, служащие для подключения к общему проводу – «земле».
Полный оборот выходного вала двигателя состоит из N-ного количества шагов. Большинство двигателей рассчитаны на шаг 1,8 градуса, таким образом, полный оборот выходного вала будет совершён за 360/1,8 = 200 шагов.
Привод шагового двигателя меняет положение выходного вала на один шаг при подаче на одну из обмоток напряжения питания. Направление протекания тока через обмотку при этом указывает на направление вращения. Для совершения следующего шага необходимо выключить первую обмотку и подать питание на вторую, соблюдая направление тока через обмотку. Итого за 100 полных циклов поочерёдной запитки обмоток мотор сделает ровно один оборот выходного вала.
Поэтому для направления токов требуются устройства управления шаговыми двигателями.
Способы управления электроприводом.
Для управления приводами существует ряд способов, применяемых в зависимости от характера решаемых задач и назначения шагового двигателя в разных областях промышленности.
- Одиночные импульсы. Данный способ управления электроприводом считается самым простым. Он основан на одновременном подключении только одной катушки. Для совершения полного оборота ротора требуется 48 импульсов. При этом каждый перемещает ротор на 7,5 градусов.
- Двойной импульс. В этом случае системы управления шаговыми двигателями основаны на одновременном подключении двух соседних катушек. Для полного оборота ротора требуется также 48 импульсов. Каждый импульс перемещает ротор на 7,5 градусов.
- Комбинированные импульсы. Суть в том, что устройство управления электроприводом чередует первый и второй способы. Двигателю требуется 96 импульсов, чтобы совершить один оборот. Каждый импульс перемещает ротор на 3,75 градуса.
Остались вопросы касательно управления электроприводом? Задайте их сотрудникам компании «Степмотор» и примите решение о приобретении системы управления шаговыми двигателями! Ведь купить контроллер шагового двигателя именно у нас – значит, получить качественный промышленный продукт за разумную цену.
Драйверы и контроллеры шаговых двигателей
Драйверы и контроллеры шаговых двигателей- Фрезерно-гравировальныe станки
- Лазерные станки с ЧПУ
- Станок плазменной резки
- Станки для школ
- 3D Принтеры
- Покрасочный станок
- Комплектующие к ЧПУ
- Комплектующие для лазерных станков
- Комплектующие для волоконных лазеров
- Готовые модули
- Режущий инструмент
- Фрезы ARDEN для ручных и ЧПУ фрезеров
- Фрезы пазовые прямые
- Фрезы для выравнивания поверхности
- Фрезы V-образные
- Фрезы кромочные прямые
- Фрезы для врезания петель и замков
- Фрезы пазовые галтельные
- Фрезы радиусные полукруглые
- Фрезы «Ласточкин хвост»
- Фрезы пазовые
- Фрезы четвертные
- Фрезы профильные
- Фреза «Гусёк» (псевдофилёнка), 222 серия
- Фрезы «Гусёк» 210 серия
- Фрезы «Тройной внешний радиус», 323 серия
- Фрезы «Декоративный гусёк» 212 серия
- Фрезы «Классический узор», 211 серия
- Фрезы «Тройной внутренний радиус», 324 серия
- Фрезы «Шар» 208 серия
- Фрезы Бычий нос «Катушка», 330 серия
- Фрезы внешнее и внутреннее скругление 2 в 1
- Фрезы для скругления удлиненные
- Фрезы мультипрофильные (Карниз), 351 серия
- Фрезы овальное скругление (Жалюзи)
- Фрезы превсофиленка «Волна-1»
- Фрезы профильные «Ручка» 502 серии
- Фрезы профильные «Углубленный шар», 329 серия
- Фрезы профильные «Французская классика», 352 серия
- Фрезы профильные для плинтусов, 403 серия
- Фрезы фигурные «Классический гусёк», 311 серия
- Фрезы филёночные, 416 серия
- Фрезы для сращивания и мебельной обвязки
- Комплектующие к фрезам ARDEN
- Набор радиальных и фасочных фрез
- Комплектующие для плазменной резки
- Пневматическое оборудование
- Дисковые пилы
- Оборудование для покраски
- Ручной инструмент
Блоки управления шаговыми двигателями. Драйверы шаговых двигателей. Контроллеры шаговых двигателей. Управление от компьютера. Устройства управления ШД
Мы предоставляем открытый коммуникационный протокол, а также готовое программное обеспечение под ОС Windows для работы с контроллерами серии SMSD.
Для контроллеров SMSD‑4.2CAN предоставляется программа CANOpen Builder для конфигурирования работы по протоколу CANopen через USB подключение. Программа также позволяет выполнить тестовые запуски шагового привода через SDO запросы, настроить параметры работы в сети CAN, сконфигурировать необходимые TPDO/RPDO, пакетов, выполнить сброс к заводским настройкам. Программа также позволяет получить доступ к объектному словарю блока через USB интерфейс, выполняет расчёты параметров управления шаговым двигателем для режима управления напряжением.
Для контроллеров SMSD‑LAN мы предоставляем программу SMC‑Program‑LAN, с помощью которой можно составлять и записывать пользовательские программы в память блока, считывать программы из памяти блока, осуществлять покомандное управление приводом (режим direct control). Готовые программы управления можно записывать в файл на ПК и считывать их из файла. Программа также позволяет считывать и изменять настройки передачи по сети Ethernet и изменять пароль доступа к контроллеру. Соединение с компьютером в программе SMC‑Program‑LAN доступно как по сети Ethernet, так и через USB.
Для контроллеров SMSD‑Modbus предоставляется две программы – SMSD Controller Demonstrator и SMC‑Program‑Modbus.
SMSD Controller Demonstrator предназначена конфигурирования контроллера, считывания и записи пользовательских программ в память блока, изменения регистров контроллера. Также SMSD Controller Demonstrator содержит утилиту SMSD Updater для поиска обновлений программного обеспечения контроллера и их установки.
SMC‑Program‑Modbus предназначена для управления шаговым приводом в режиме Direct Control, считывания текущих параметров работы привода, изменения основных настроек движения. Программа позволяет редактировать и записывать в память контроллера пользовательские программы. Редактирование программ доступно в виде списка инструкций IL и в виде лестничных диаграмм (начиная с версии ПО V.2.0).
Помимо программ для ПК мы предлагаем HMI панели с готовым программным обеспечением для работы с контроллерами SMSD‑Modbus. HMI панель с готовым ПО позволяет осуществлять контроль за состоянием блока без использования ПК, считывать пользовательские программы из памяти, редактировать и записывать готовые программы в память контроллера. Готовые программы можно переносить с ПК на HMI панель с помощью Flash накопителей (USB).
Для работы с контроллерами SMSD‑1.5 предоставляется программа SMC‑Program ver.4.0.5. Программа предназначена для создания, редактирования пользовательских программ, считывания программ из памяти и записи программ в память контроллеров. Также программа позволяет осуществлять управление шаговым приводом в режиме реального времени direct control.
Отличия контроллеров шаговых двигателей нового поколения от контроллеров, разработанных в начале 21 века.
Увеличить картинку «Отличия контроллеров шаговых двигателей нового поколения от контроллеров, разработанных в начале 21 века»Модули драйверов двигателей
Модуль 16-и канального ШИМ (PWM) контроллера на базе микросхемы PCA9685. Идеально подходит для управления 16 рулевыми машинками (сервоприводами). Интерфейс управления: I2C Напряжение питания модуля: 3-5 В • Питание модуля: 3.3 или 5 В оба напряжения входят в диапазон допустимых; • Питание чипа (VC..
171.99 р.
Технические характеристики Напряжение питания силовой части (VMOT) : 5 — 35В Напряжения питания логической части (VDD) : 3-5,5В Ток максимальный, непрерывный, без дополнительного охлаждения: 1А Ток максимальный, с дополнительным охлаждением: 2.2A Дробление шага: 1/2/4/8/16 Описание DRV8825 это мик..
82.80 р.
Выходное напряжение 5 В Выходной ток 5А(max) Входное напряжение 7 – 30В, рекомендуемое до 24В ..
112.98 р.
Технические характеристики Напряжение питания силовой части (VMOT) : 8 — 45В Напряжения питания логической части (VDD) : 3-5,5В Ток максимальный, непрерывный, без дополнительного охлаждения: 1А Ток максимальный, с дополнительным охлаждением: 2.2A Дробление шага: 1/2/4/8/16/32 Описание DRV8825 это м..
141.27 р.
Технические характеристики напряжение питания: +7…+ 24 В; количество силовых каналов: 4; максимально-продолжительный ток каждого канала: 0,6 А; напряжение питания сервоприводов: 5 В; возможность реверса каждого двигателя; возможность независимого управления каждым каналом; Габариты 53 ..
136.64 р.
Драйвер двигателей на базе микросхемы VNh3SP30. Ток до 30Ампер. Напряжение до 16В • Диапазон напряжения питания: 5,5V … 16V (от 5,0 вольт, не работает). • Номинальный\максимальный ток: 14A\30A • Управление логическим уровнем 3,3 вольт • Максимальная частота ШИМ: 20 кГц ..
343.20 р.
Двухканальный драйвер двигателей на базе микросхемы VNh3SP30. Ток до 30Ампер на канал. Напряжение до 16В Позволяет управлять двумя двигателями постоянного тока или одним шаговым двигателем. • Напряжение питания на входе питания моторов Vin: 5,5 … 16 В; • Напряжение логики: 5 В; • Основан на чипе ..
532.00 р.
Питание 12В, 30A..
334.13 р.
Напряжение логики 3 – 5 В (VDD, GND) Напряжение для двигателей 5 – 46В (VMOT, GND) Рабочий выходной ток 1,2 А, до 2 А (с радиатором) Значение микрошага: 1/2, 1/4, 1/8, 1/16; Значение микрошага с интерполяцией: до 1/256; GND и VIO – питание логики; M1B, M1A, M2A, M2B – управление фазами двигателя; ..
407.87 р.
Данный модуль драйвера позволяет эффективно управлять одним шаговым двигателем, часто используется в 3D принтерах и станках ЧПУ. Больше всего привлекает бесшумной работой шагового двигателя, что довольно актуально на 3D принтерах работающих дома, большая надежность, повышенная мощностью до 2А по сра..
305.11 р.
Микросхема: L293D двойной-H мост DC моторов ..
630.48 р.
Контроллер позволяет управлять одним шаговым двигателем или двумя коллекторными двигателями постоянного тока. Для подключения двигателей постоянного тока предусмотрены клеммники — напряжение питания управляемой части (постоянный ток): 5-35В — питание внешней логики (Vss): 5-7В — входное напряжение..
218.13 р.
Микросхема L298N • Управляющая часть пикового тока : 2 a • Диапазон питания: от 4,5 до 5,5 В • Логическая часть рабочего текущего диапазона: 0 ~ 36 мА • Диапазон входного напряжения управления: 4,5 — 5,5 • Максимальная потребляемая мощность: 20 Вт • Температура хранения: 25 град C ~ + 130 C • Разме..
221.27 р.
Микросхема L298N Напряжение питания: 5В Напряжение питания моторов: 5-35В Максимальный ток мотора: 2А (пиковый ток 3 А) Габариты: 43.5 мм х 43.2мм х 29.4мм..
121.90 р.
Великолепный двухканальный драйвер моторов, который идеально подходит для сопряжения микроконтроллера с двумя маленькими электродвигателями постоянного тока или для управления одним биполярным шаговым мотором. Основанные на MOSFET H-мостах намного более эффективны, чем основанные на BJT H-мостах кот..
288.56 р.
Контроллер шагового двигателя. Микросхема контроллера: TB6560 — ток удержания 25%,50%,100% в процентах от тока номинального драйвера — ток рабочий 25%, 50%, 75%, 100% в процентах от тока номинального драйвера — выбрать шаг двигателя (микрошаг) 1, 1/2, 1/8, 1/16 Максимальный ток: 3А (3,5А в пике..
407.39 р.
Кол-во фаз: 2; Напряжение питания: 9 — 40 В постоянного тока; Максимальный выходной ток: 4 А; Шесть вариантов микрошага. Максимальное деление шага до 6400 шагов/оборот; Входные сигналы оптоизолтрованы высокоскоростными оптронами; Выполнен в закрытом корпусе; Встроенная тепловая защита; Защита от пер..
590.88 р.
Драйвер двигателя L9110S — с его помощью можно контролировать вращение 2-х независимых коллекторных моторов постоянного тока или одного 4-х проводного 2-х фазного шагового двигателя. Характеристики • Входное напряжение: 2.5-12 В; • Допустимый ток на канал: 800 мА; • Максимальный кратковременный ток:..
75.27 р.
Модуль предназначен для управления шаговым двигателем или другой нагрузкой ► Тип шагового двигателя: Униполярный ► Напряжение питания: 5 В, DC ► Количество фазы: 4 ► Частота: 100 Гц ► Сопротивление постоянного тока: 50Ω ± 7% (25 ℃) ..
36.83 р.
Модуль ключей ULN2003 для шагового двигателя Характеристики Рабочее напряжение: 5 — 45 В; Максимальный ток нагрузки: 500 мА; Напряжение управляющей логики: 5 В. ..
38.42 р.
Регулируемое напряжение 50 — 220 V (на выходе) Технические характеристики: Максимальная мощность: 2000 Вт Рабочее напряжение: AC 220 V Пластина радиатора размер: 48x35x30 мм ..
121.17 р.
Материал: Алюминий Диапазон входного напряжения: DC 9V-60V Номинальный ток: 10А Максимальный ток: 20А Размер: 105 x 50 x 33 мм Подходит для двигателя постоянного тока (или нагрузки постоянного тока) в пределах 20А…
321.31 р.
Рабочее напряжение: 5 В … 30 В, защита от обратного подключения Номинальный ток 2,2: максимальный ток 5А Максимальная мощность 2,3: 150 Вт Рабочая частота: 1 кГц ~ 99 кГц регулируемая, 1 кГц шаг, частота по умолчанию 20 кГц, точность около 1% Рабочий цикл: 0-100%, 1% шаг размер изделия: 79 мм * 4..
370.97 р.
Регулятор хода бесколлекторных двигателей. Оптимизирован для применения в мультикоптерах. Ток до 30А (пиковый ток 40А на 10 секунд) Входное напряжение 2-3s LiPo Вес 25гр..
373.46 р.
Габариты 69 × 53 × 9 mm Напряжение питания: 3.3 или 5 В Микросхема: PCA9685 Потребляемый ток: до 10 мА в рабочем режиме до 15,5 мкА в режиме ожидания Ток нагрузки на выходах: до 25 мА, при Vcc=5В и схемой с открытым стоком до 10 мА, при Vcc=5В и схемой с каскадным выходом Частота тактирования: 25 МГ..
604.39 р.
Драйвер для шагового двигателя из принтера
Простой драйвер для шагового двигателя
Порой встает вопрос о том, как бы управлять шаговым двигателем. Как правило, это нужно осуществить, при проектировании какой-нибудь самоделки или более серьезного проекта, например станка с числовым программным управлением. Естественно, такое управление можно купить. Но, драйвер для шагового двигателя из принтера также можно сделать. Это будет самый простой вариант, который наглядно продемонстрирует возможность управлять этим устройством.
Понадобится старый принтер или сканер, можно неработающий. Оттуда, собственно, и будет извлечен шаговый двигатель, если такового нет в наличии. Также из платы потребуется выпаять управляющую микросхему под названием ULN2003. Она может быть и другая, в разной технике стоят различные микросхемы. Подойдут её аналоги: TD62003, отечественная К1109КТ22, более популярная MC1413, L203 и SG2003.
В принципе, подойдут и собратья этих микросхем, такие как ULN2023A, ULN2803 и им подобные. Стоит только смотреть даташиты. Микросхемы можно купить или выпаять из подобной техники. При выпаивании стоит быть осторожными, так как такие электронные компоненты извлекаются сложнее, и есть угроза повреждения их ножек.
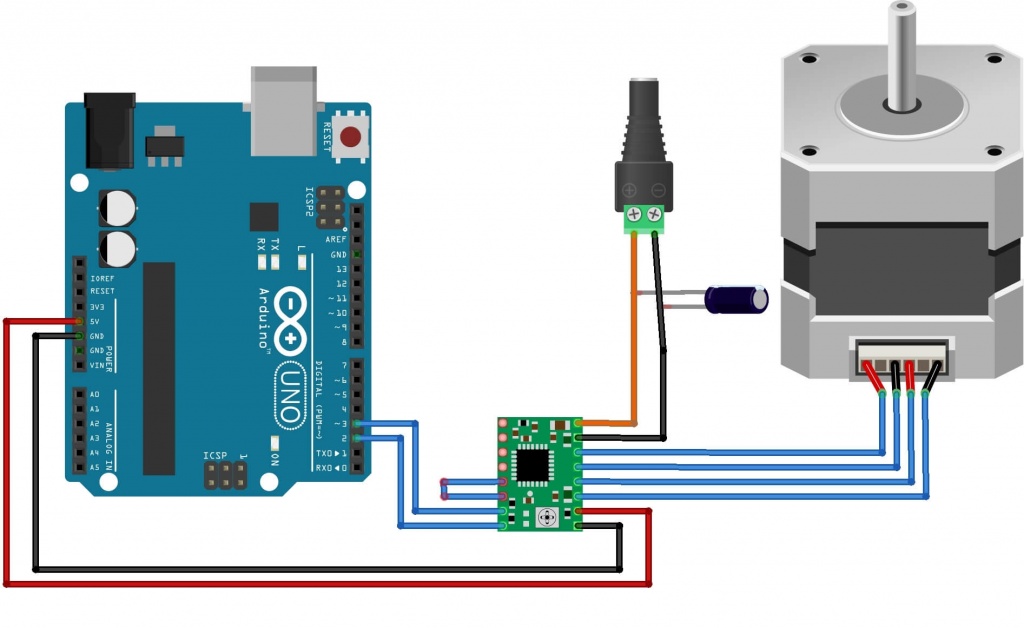
Схема подключения
Схема подключения проста.
Потребуется приобрести разъем DB-25, который будет подключаться к порту компьютера, для управления двигателем, в случае, если конструируется ЧПУ станок. Диапазоны входного напряжения указаны для конкретно этой микросхемы. Остальные микросхемы, возможно, потребуют отличного от этого напряжения питания.
В качестве источника питания отлично подойдет компьютерный блок питания. В принципе, подойдет любое зарядное или БП, напряжением от 12В до 24В, с током от 350мА.
Стоит отметить, что желательно обладать технической документацией к модели используемого двигателя, что упростит его подключение к драйверу.
Сам драйвер выглядит так:
В случае если документация не найдена на двигатель, то попробовать найти шины питания требуется в первую очередь. Сделать это можно, как наугад, с возможностью спалить микросхему, так и используя батарейку, к примеру, если двигатель рассчитан на небольшое напряжение.
Если конструкция делается для станка с ЧПУ, то на компьютер потребуется скачать программу Turbo CNC и настроить её под свои нужды.
Драйвер шагового двигателя
Драйверы для шаговых двигателей: описание и применение
В современных станках, используемых для обработки металла, древесины, полимеров и других твердых материалов, широко применяются электромоторы шагового типа. Они позволяют выполнять высокоточные дискретные перемещения заготовки и рабочего инструмента. В таких моторах используются статоры с раздельными обмотками, управление работой которых требует применения специальной электроники.
Функция управления шаговыми двигателями выполняется драйверами. Данное устройство представляет собой особый электронный блок, получающий команды с материнской платы станка. Применение драйверов позволяет точно контролировать величину напряжения, подаваемого на шаговый двигатель, повысив тем самым КПД и точность работы станка. Современные модели снабжены встроенной защитой от короткого замыкания, системой компенсацией резонанса, режимом удержания ротора. Использование качественных драйверов позволяет осуществлять плавный запуск, продлевающий срок службы шагового двигателя.
Устройство выполнено в прочном полимерном корпусе, не боящемся ударов, вибрации и температурных перепадов. Использование качественных разъемов обеспечивает надежную фиксацию контактов даже при значительных нагрузках. Наличие схемы подключения со всеми необходимыми маркировками, нанесенными на верхнюю крышку, исключает ошибки при коммутации драйвера.
Особенности выбора драйвера шагового двигателя
Эффективность работы управляющего устройства оказывает крайне большое влияние на функционирование станка в целом. Именно от типа драйвера шагового двигателя в большой степени зависит максимальный момент и мощность на валу. Как показывает практика, наилучших результатов позволяют добиться драйверы с импульсной стабилизацией тока, способные обеспечить пятикратный прирост момента шагового двигателя в определенном диапазоне скоростей. Другое преимущество таких устройств расширение допустимого диапазона скоростей вращения.
Драйвер шагового двигателя A4988 | AmperMarket.kz
#define dirPin 2
#define stepPin 3
#define stepsPerRevolution 200
void setup() {
// Declare pins as output:
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
}
void loop() {
// Set the spinning direction clockwise:
digitalWrite(dirPin, HIGH);
// Spin the stepper motor 1 revolution slowly:
for (int i = 0; i < stepsPerRevolution; i++) {
// These four lines result in 1 step:
digitalWrite(stepPin, HIGH);
delayMicroseconds(2000);
digitalWrite(stepPin, LOW);
delayMicroseconds(2000);
}
delay(1000);
// Set the spinning direction counterclockwise:
digitalWrite(dirPin, LOW);
// Spin the stepper motor 1 revolution quickly:
for (int i = 0; i < stepsPerRevolution; i++) {
// These four lines result in 1 step:
digitalWrite(stepPin, HIGH);
delayMicroseconds(1000);
digitalWrite(stepPin, LOW);
delayMicroseconds(1000);
}
delay(1000);
// Set the spinning direction clockwise:
digitalWrite(dirPin, HIGH);
// Spin the stepper motor 5 revolutions fast:
for (int i = 0; i < 5 * stepsPerRevolution; i++) {
// These four lines result in 1 step:
digitalWrite(stepPin, HIGH);
delayMicroseconds(500);
digitalWrite(stepPin, LOW);
delayMicroseconds(500);
}
delay(1000);
// Set the spinning direction counterclockwise:
digitalWrite(dirPin, LOW);
//Spin the stepper motor 5 revolutions fast:
for (int i = 0; i < 5 * stepsPerRevolution; i++) {
// These four lines result in 1 step:
digitalWrite(stepPin, HIGH);
delayMicroseconds(500);
digitalWrite(stepPin, LOW);
delayMicroseconds(500);
}
delay(1000);
}
DRV8825 Держатель драйвера шагового двигателя, сильный ток
| Держатель драйвера шагового двигателя DRV8824 / DRV8825 с размерами. |
|---|
Обзор
Этот продукт представляет собой несущую плату или коммутационную плату для драйвера шагового двигателя DRV8825 компании TI; Поэтому мы рекомендуем внимательно прочитать техническое описание DRV8825 перед использованием этого продукта. Этот драйвер шагового двигателя позволяет вам управлять одним биполярным шаговым двигателем с выходным током до 2,2 А на катушку (дополнительную информацию см. В разделе «Рекомендации по рассеиванию мощности , » ниже).Вот некоторые ключевые особенности драйвера:
- Простой интерфейс управления шагом и направлением
- Шесть различных разрешений шага: полный шаг, полушаг, 1/4 шага, 1/8 шага, 1/16 шага и 1/32 шага
- Регулируемое управление током позволяет вам установить максимальный выходной ток с помощью потенциометра, что позволяет вам использовать напряжения, превышающие номинальное напряжение вашего шагового двигателя, для достижения более высокой скорости шага.
- Интеллектуальное управление измельчением, которое автоматически выбирает правильный текущий режим затухания (быстрое затухание или медленное затухание)
- Максимальное напряжение питания 45 В
- Встроенный регулятор (внешний источник логического напряжения не требуется)
- Может напрямую взаимодействовать с 3.Системы 3 В и 5 В
- Тепловое отключение при перегреве, отключение при перегрузке по току и блокировка при пониженном напряжении
- Защита от короткого замыкания на массу и короткого замыкания
- 4-слойная медная печатная плата на 2 унции для улучшенного отвода тепла
- Открытая паяемая заземляющая площадка под микросхемой драйвера в нижней части печатной платы
- Размер модуля, распиновка и интерфейс во многом соответствуют нашим держателям драйверов шагового двигателя A4988 (дополнительную информацию см. Внизу этой страницы).
Обратите внимание, что у нас есть несколько других драйверов шаговых двигателей, которые можно использовать в качестве альтернативы этому модулю (и заменять их во многих приложениях):
- Держатель DRV8834 работает с напряжением питания двигателя всего 2.5 В, что делает его пригодным для низковольтных приложений.
- Носитель DRV8880 предлагает динамически масштабируемое ограничение тока и «Автонастройку», которая автоматически выбирает режим затухания в каждом цикле ШИМ для оптимального регулирования тока на основе таких факторов, как сопротивление и индуктивность обмотки двигателя, а также динамическая скорость и нагрузка двигателя.
- Несущая MP6500 может выдавать до 1,5 А на фазу (непрерывно) без радиатора и доступна в двух версиях: одна с потенциометром для управления ограничением тока, а другая — с цифровым регулятором ограничения тока для динамической регулировки ограничения тока с помощью микроконтроллера. .
- Держатель драйвера шагового двигателя Black Edition A4988 — это более производительная версия нашего оригинального держателя A4988.
Этот продукт поставляется со всеми компонентами для поверхностного монтажа, включая микросхему драйвера DRV8825, которые установлены, как показано на рисунке продукта.
Этот продукт поставляется в индивидуальной упаковке с включенными, но не припаянными, штыревыми контактами 0,1 ″; у нас также есть версия с уже впаянными штырями заголовка. Для клиентов, заинтересованных в больших объемах при более низких затратах на единицу продукции, мы предлагаем версию в оптовой упаковке без штырей заголовка и версию в оптовой упаковке с установленными штырями заголовка.
Некоторые униполярные шаговые двигатели (например, с шестью или восемью выводами) могут управляться этим драйвером как биполярные шаговые двигатели. Для получения дополнительной информации ознакомьтесь с часто задаваемыми вопросами. С этим драйвером нельзя использовать униполярные двигатели с пятью выводами.
Оборудование в комплекте
Держатель драйвера шагового двигателя DRV8825 поставляется с одним разъединяемым штекером 1 × 16 контактов 0,1 дюйма. Эти разъемы можно припаять для использования с беспаечными макетными платами или разъемами с гнездом 0,1 дюйма.Вы также можете припаять провода двигателя и другие соединения непосредственно к плате. (Также доступна версия этой платы с уже установленными заголовками.)
| |
|
Осторожно: Установка штифтов заголовка так, чтобы сторона шелкографии была вверху, а компоненты опущены, может ограничить диапазон движения триммера, используемого для установки ограничения тока.Если вы планируете установить контакты заголовка в этой ориентации, пожалуйста, установите ограничение тока перед пайкой контактов.
Использование драйвера
| Минимальная электрическая схема для подключения микроконтроллера к держателю драйвера шагового двигателя DRV8824 / DRV8825 (полношаговый режим). |
|---|
Силовые разъемы
Драйвер требует, чтобы напряжение питания двигателя 8,2 — 45 В было подключено через VMOT и GND.Этот источник питания должен иметь соответствующие разделительные конденсаторы рядом с платой, и он должен обеспечивать ожидаемый ток шагового двигателя.
Предупреждение: В этой несущей плате используются керамические конденсаторы с низким ESR, что делает ее восприимчивой к деструктивным скачкам напряжения LC, особенно при использовании кабелей питания длиной более нескольких дюймов. При правильных условиях эти выбросы могут превысить максимальное номинальное напряжение 45 В для DRV8825 и необратимо повредить плату, даже если напряжение питания двигателя составляет всего 12 В.Один из способов защитить драйвер от таких скачков — подключить большой (не менее 47 мкФ) электролитический конденсатор к источнику питания двигателя (VMOT) и заземлить где-нибудь рядом с платой.
Соединения двигателя
DRV8825 может приводить в действие четырех, шести и восьмипроводные шаговые двигатели, если они правильно подключены; Ответ на часто задаваемые вопросы подробно объясняет правильную проводку.
Предупреждение: Подключение или отключение шагового двигателя при включенном драйвере может привести к его повреждению.(В более общем смысле, переустановка чего-либо, пока оно находится под напряжением, вызывает проблемы.)
Размер шага (и микрошага)
Шаговые двигателиобычно имеют размер шага (например, 1,8 ° или 200 шагов на оборот), который применяется к полному шагу. Микрошаговый драйвер, такой как DRV8825, обеспечивает более высокое разрешение, позволяя определять промежуточные положения ступеней, что достигается за счет подачи питания на катушки с промежуточными уровнями тока. Например, управление двигателем в четвертьшаговом режиме даст двигателю с 200 шагами на оборот 800 микрошагов на оборот за счет использования четырех различных уровней тока.
Входы селектора разрешения (размера шага) (MODE0, MODE1 и MODE2) позволяют выбрать одно из шести разрешений шага в соответствии с таблицей ниже. Все три входа селектора имеют внутренние понижающие резисторы 100 кОм, поэтому оставление этих трех выводов выбора микрошага отключенными приводит к переходу в полношаговый режим. Для правильной работы микрошаговых режимов необходимо установить достаточно низкий предел тока (см. Ниже), чтобы сработало ограничение тока. В противном случае промежуточные уровни тока не будут поддерживаться должным образом, и двигатель будет пропускать микрошаги.
| РЕЖИМ 0 | РЕЖИМ1 | РЕЖИМ 2 | Разрешение микрошага |
|---|---|---|---|
| Низкая | Низкая | Низкая | Полный шаг |
| Высокая | Низкая | Низкая | Полушаг |
| Низкая | Высокая | Низкая | 1/4 шага |
| Высокая | Высокая | Низкая | 1/8 шага |
| Низкая | Низкая | Высокая | 1/16 шага |
| Высокая | Низкая | Высокая | 1/32 шага |
| Низкая | Высокая | Высокая | 1/32 шага |
| Высокая | Высокая | Высокая | 1/32 шага |
Управляющие входы
Каждый импульс на входе STEP соответствует одному микрошагу шагового двигателя в направлении, выбранном контактом DIR.Оба этих входа по умолчанию подтягиваются к низкому уровню через внутренние понижающие резисторы 100 кОм. Если вам нужно вращение только в одном направлении, вы можете оставить DIR отключенным.
Микросхема имеет три разных входа для управления состоянием питания: RESET, SLEEP и ENBL. Подробные сведения об этих состояниях питания см. В таблице данных. Обратите внимание, что драйвер подтягивает вывод SLEEP к низкому уровню через внутренний понижающий резистор 1 МОм, и он подтягивает выводы RESET и ENBL к низкому уровню через внутренние понижающие резисторы 100 кОм.Эти состояния по умолчанию RESET и SLEEP не позволяют драйверу работать; оба этих контакта должны иметь высокий уровень для включения драйвера (они могут быть подключены напрямую к логическому «высокому» напряжению от 2,2 до 5,25 В, или ими можно динамически управлять через подключения к цифровым выходам микроконтроллера). Состояние вывода ENBL по умолчанию — активировать драйвер, поэтому этот вывод можно оставить отключенным.
| Схема выводов nSLEEP и nFAULT на держателях DRV8824 / DRV8825 / DRV8834. |
|---|
DRV8825 также имеет выход FAULT, который устанавливает низкий уровень всякий раз, когда полевые транзисторы H-моста отключены в результате защиты от перегрузки по току или теплового отключения. Плата-носитель соединяет этот вывод с выводом SLEEP через резистор 10 кОм, который действует как подтягивание НЕИСПРАВНОСТИ всякий раз, когда SLEEP внешне удерживается на высоком уровне, поэтому внешнее подтягивание на выводе НЕИСПРАВНОСТЬ не требуется. Обратите внимание, что несущая панель включает в себя защитный резистор 1,5 кОм, последовательно соединенный с выводом FAULT, что позволяет безопасно подключать этот вывод напрямую к источнику логического напряжения, что может произойти, если вы используете эту плату в системе, разработанной для совместимого по выводам A4988. перевозчик.В такой системе резистор 10 кОм между SLEEP и FAULT будет затем действовать как подтягивающий для SLEEP, что делает несущую DRV8825 более прямой заменой A4988 в таких системах (A4988 имеет внутреннюю подтяжку в SLEEP штырь). Чтобы не допустить сбоев в работе вывода SLEEP, любой внешний подтягивающий резистор, который вы добавляете к входу вывода SLEEP, не должен превышать 4,7 кОм.
Ограничение тока
Для достижения высокой скорости шага мощность двигателя обычно намного выше, чем было бы допустимо без ограничения активного тока.Например, типичный шаговый двигатель может иметь максимальный номинальный ток 1 А с сопротивлением катушки 5 Ом, что означает максимальное напряжение питания двигателя 5 В. Использование такого двигателя с напряжением 12 В позволит увеличить скорость шага, но ток должен активно ограничиваться до уровня ниже 1 А, чтобы предотвратить повреждение двигателя.
DRV8825 поддерживает такое ограничение активного тока, а подстроечный потенциометр на плате может использоваться для установки ограничения тока. Обычно вам нужно установить ограничение тока драйвера на уровне или ниже номинального тока вашего шагового двигателя.Один из способов установить ограничение тока — это перевести драйвер в полношаговый режим и измерить ток, протекающий через одну катушку двигателя, без синхронизации входа STEP. Измеренный ток будет в 0,7 раза больше предельного тока (поскольку обе катушки всегда включены и ограничены примерно 70% от установленного предела тока в полношаговом режиме).
Другой способ установить ограничение тока — измерить напряжение на выводе «ref» и вычислить результирующее ограничение тока (резисторы измерения тока 0.100 Ом ). Напряжение на выводе ref доступно через переходное отверстие, обведенное кружком на нижней шелкографии печатной платы. Ограничение тока относится к опорному напряжению следующим образом:
Ограничение по току = VREF × 2
Так, например, если у вас есть шаговый двигатель с номиналом 1 А, вы можете установить ограничение тока на 1 А, установив опорное напряжение на 0,5 В.
Примечание: Ток катушки может сильно отличаться от тока источника питания, поэтому не следует использовать ток, измеренный на источнике питания, для установки ограничения тока.Подходящее место для установки измерителя тока — это последовательно с одной из катушек шагового двигателя.
Рекомендации по рассеиванию мощности
ИС драйвера DRV8825 имеет максимальный номинальный ток 2,5 А на катушку, но резисторы измерения тока дополнительно ограничивают максимальный ток до 2,2 А, а фактический ток, который вы можете подать, зависит от того, насколько хорошо вы можете поддерживать ИС в холодном состоянии. Печатная плата носителя предназначена для отвода тепла от ИС, но для подачи более чем примерно 1.5 А на змеевик, требуется радиатор или другой метод охлаждения.
Этот продукт может нагреться до и достаточно, чтобы обжечься задолго до того, как чип перегреется. Будьте осторожны при обращении с этим продуктом и другими подключенными к нему компонентами.
Обратите внимание, что измерение тока, потребляемого источником питания, обычно не дает точного измерения тока катушки. Поскольку входное напряжение для драйвера может быть значительно выше, чем напряжение катушки, измеренный ток на источнике питания может быть немного ниже, чем ток катушки (драйвер и катушка в основном действуют как импульсный понижающий источник питания).Кроме того, если напряжение питания очень высокое по сравнению с тем, что требуется двигателю для достижения заданного тока, рабочий цикл будет очень низким, что также приведет к значительным различиям между средним и среднеквадратичным токами. Кроме того, обратите внимание, что ток катушки является функцией установленного ограничения тока, но он не обязательно равен установленному пределу тока . Фактический ток через каждую катушку изменяется с каждым микрошагом. См. Техническое описание DRV8825 для получения дополнительной информации.
Принципиальная схема
| Принципиальная схема держателя драйвера шагового двигателя DRV8824 / DRV8825. |
|---|
Токовые резисторы (R2 и R3) на держателе DRV8825 имеют сопротивление 0,100 Ом. Эта схема также доступна для скачивания в формате pdf (196 КБ pdf).
Ключевые различия между DRV8825 и A4988
Держатель DRV8825 был разработан, чтобы быть максимально похожим на наши держатели драйверов шагового двигателя A4988, и его можно использовать в качестве альтернативы держателю A4988 во многих приложениях, поскольку он имеет тот же размер, распиновку и общий интерфейс управления. .Однако следует отметить несколько различий между двумя модулями:
| Держатель привода шагового двигателя DRV8825. |
|---|
| A4988 Держатель драйвера шагового двигателя, Black Edition (показан с оригинальными зелеными резисторами считывания тока 50 мОм). |
|---|
- Вывод, используемый для подачи логического напряжения на A4988, используется как выход FAULT DRV8825, поскольку DRV8825 не требует питания логики (а A4988 не имеет выхода неисправности).Обратите внимание, что безопасно подключать вывод FAULT непосредственно к источнику питания логики (между выводом IC и выводом есть резистор 1,5 кОм для его защиты), поэтому модуль DRV8825 можно использовать в системах, разработанных для A4988, которые маршрутизируют логику мощность к этому контакту.
- Вывод SLEEP на DRV8825 не подтягивается по умолчанию, как на A4988, но несущая плата подключает его к выводу FAULT через резистор 10 кОм. Следовательно, системы, предназначенные для A4988, которые направляют логическое питание на вывод FAULT, будут эффективно иметь подтягивание 10k на выводе SLEEP.(Этот резистор 10 кОм отсутствует в начальной (md20a) версии носителя DRV8825.)
- Потенциометр ограничения тока находится в другом месте.
- Отношение между настройкой ограничения тока и напряжением опорного вывода другое.
- DRV8825 предлагает 1/32 шага микрошага; A4988 опускается только до 1/16 шага.
- Входы вывода выбора режима, соответствующие шагу 1/16 на A4988, приводят к микрошагу 1/32 на DRV8825.Для всех других разрешений микрошага таблица выбора шага одинакова как для DRV8825, так и для A4988.
- Требования к синхронизации для минимальной длительности импульса на выводе STEP различны для двух драйверов. В DRV8825 каждый шаговый импульс высокого и низкого уровня должен быть не менее 1,9 мкс; при использовании A4988 они могут составлять всего 1 мкс.
- DRV8825 имеет более высокое максимальное напряжение питания, чем A4988 (45 В против 35 В), что означает, что DRV8825 может более безопасно использоваться при более высоких напряжениях и менее подвержен повреждению из-за скачков напряжения LC.
- DRV8825 может выдавать больший ток, чем A4988, без какого-либо дополнительного охлаждения (на основе наших полношаговых тестов: 1,5 А на катушку для DRV8825 против 1,2 А на катушку для A4988 Black Edition и 1 А на катушку для оригинального держателя A4988. ).
- DRV8825 использует другое соглашение об именах для выходов шагового двигателя, но они функционально такие же, как соответствующие контакты на держателе A4988, поэтому одинаковые подключения к обоим драйверам приводят к одинаковому поведению шагового двигателя.На обеих платах первая часть этикетки идентифицирует катушку (так что у вас есть катушки «A» и «B» на DRV8825 и катушки «1» и «2» на A4988).
- Для тех, кто работает с приложениями, чувствительными к цвету, обратите внимание, что носитель DRV8825 фиолетовый.
Таким образом, носитель DRV8825 достаточно похож на наши носители A4988, поэтому минимальная схема подключения для A4988 является допустимым альтернативным способом подключения DRV8825 к микроконтроллеру:
| Альтернативная минимальная электрическая схема для подключения микроконтроллера к держателю драйвера шагового двигателя DRV8824 / DRV8825 (полношаговый режим). |
|---|
Люди часто покупают этот товар вместе с:
DRV8834 Держатель привода низковольтного шагового двигателя
| Держатель низковольтного драйвера шагового двигателя DRV8834 с размерами. |
|---|
Обзор
Этот продукт является несущей платой или коммутационной платой для низковольтного драйвера шагового двигателя DRV8834 компании TI; Поэтому мы рекомендуем внимательно прочитать техническое описание DRV8834 перед использованием этого продукта.Этот драйвер шагового двигателя позволяет вам управлять одним биполярным шаговым двигателем с выходным током до 2 А на катушку (дополнительную информацию см. В разделе «Рекомендации по рассеиванию мощности » ниже). Вот некоторые ключевые особенности драйвера:
- Простой интерфейс управления шагом и направлением
- Шесть различных разрешений шага: полный шаг, полушаг, 1/4 шага, 1/8 шага, 1/16 шага и 1/32 шага
- Регулируемое управление током позволяет вам установить максимальный выходной ток с помощью потенциометра, что позволяет вам использовать напряжения, превышающие номинальное напряжение вашего шагового двигателя, для достижения более высокой скорости шага.
- Интеллектуальное управление измельчением, которое автоматически выбирает правильный текущий режим затухания (быстрое затухание или медленное затухание)
- 2.Диапазон напряжения питания 5-10,8 В
- Встроенный регулятор (внешний источник логического напряжения не требуется)
- Может напрямую взаимодействовать с системами 3,3 В и 5 В
- Тепловое отключение при перегреве, отключение при перегрузке по току и блокировка при пониженном напряжении
- Защита от короткого замыкания на массу, короткого замыкания и короткого замыкания нагрузки
- 4-слойная медная печатная плата на 2 унции для улучшенного отвода тепла
- Открытая паяемая заземляющая площадка под микросхемой драйвера в нижней части печатной платы
- Размер модуля, распиновка и интерфейс во многом соответствуют нашим держателям драйверов шагового двигателя A4988 (дополнительную информацию см. Внизу этой страницы).
Этот продукт поставляется со всеми компонентами для поверхностного монтажа, включая микросхему драйвера DRV8834, которые установлены, как показано на рисунке продукта.
В качестве альтернативных драйверов шаговых двигателей с совместимостью выводов, которые работают с более высокими напряжениями питания двигателя, рассмотрите наш держатель DRV8825, держатель DRV8880, держатель MP6500 и держатель A4988 (также доступны в Black Edition и версии с регуляторами напряжения).
Некоторые униполярные шаговые двигатели (например, с шестью или восемью выводами) могут управляться этим драйвером как биполярные шаговые двигатели. Для получения дополнительной информации ознакомьтесь с часто задаваемыми вопросами. С этим драйвером нельзя использовать униполярные двигатели с пятью выводами.
Оборудование в комплекте
Держатель драйвера шагового двигателя DRV8834 поставляется с одной 1 × 16-контактной разъединительной полосой 0,1 ″, охватываемой разъемом. Разъемы могут быть впаяны для использования с беспаечными макетными платами или 0,1-дюймовыми гнездовыми разъемами. Вы также можете припаять провода двигателя и другие соединения непосредственно к плате.
| |
|
Использование драйвера
| Минимальная электрическая схема для подключения микроконтроллера к держателю драйвера шагового двигателя DRV8834 (1/4 шаговый режим). |
|---|
Силовые разъемы
Драйвер требует, чтобы напряжение питания двигателя 2,5-10,8 В было подключено через VMOT и GND. Этот источник питания должен иметь соответствующие разделительные конденсаторы рядом с платой, и он должен обеспечивать ожидаемый ток шагового двигателя.
Предупреждение: В этой несущей плате используются керамические конденсаторы с низким ESR, что делает ее восприимчивой к деструктивным скачкам напряжения LC, особенно при использовании кабелей питания длиной более нескольких дюймов.При правильных условиях эти скачки напряжения могут превысить максимальное номинальное напряжение 11,8 В для DRV8834 и необратимо повредить плату, даже когда напряжение питания двигателя составляет всего 9 В. Один из способов защитить драйвер от таких скачков — установить большой (не менее 47 мкФ) электролитический конденсатор между мощностью двигателя (VMOT) и заземлением где-то рядом с платой.
Соединения двигателя
DRV8834 может приводить в действие четырех, шести и восьмипроводные шаговые двигатели, если они правильно подключены; Ответ на часто задаваемые вопросы подробно объясняет правильную проводку.
Предупреждение: Подключение или отключение шагового двигателя при включенном драйвере может привести к его повреждению. (В более общем смысле, переустановка чего-либо, пока оно находится под напряжением, вызывает проблемы.)
Размер шага (и микрошага)
Шаговые двигателиобычно имеют размер шага (например, 1,8 ° или 200 шагов на оборот), который применяется к полному шагу. Микрошаговый драйвер, такой как DRV8834, обеспечивает более высокое разрешение, разрешая промежуточные положения ступенек, что достигается за счет подачи питания на катушки с промежуточными уровнями тока.Например, управление двигателем в четвертьшаговом режиме даст двигателю с 200 шагами на оборот 800 микрошагов на оборот за счет использования четырех различных уровней тока.
Входы селектора разрешения (размера шага) (M0 и M1) позволяют выбрать одно из шести разрешений шага в соответствии с таблицей ниже. M0 по умолчанию является плавающим, в то время как M1 имеет внутренний понижающий резистор 200 кОм, поэтому оставление этих двух выводов выбора микрошага отключенными приводит к переходу в 1/4 ступенчатый режим. Для правильной работы микрошаговых режимов необходимо установить достаточно низкий предел тока (см. Ниже), чтобы сработало ограничение тока.В противном случае промежуточные уровни тока не будут поддерживаться должным образом, и двигатель будет пропускать микрошаги.
| M0 | M1 | Разрешение микрошага |
|---|---|---|
| Низкая | Низкая | Полный шаг |
| Высокая | Низкая | Полушаг |
| Плавающий | Низкая | 1/4 шага |
| Низкая | Высокая | 1/8 шага |
| Высокая | Высокая | 1/16 шага |
| Плавающий | Высокая | 1/32 шага |
Управляющие входы
Каждый импульс на входе STEP соответствует одному микрошагу шагового двигателя в направлении, выбранном контактом DIR.Оба этих входа по умолчанию подтягиваются к низкому уровню через внутренние понижающие резисторы 200 кОм. Если вам нужно вращение только в одном направлении, вы можете оставить DIR отключенным.
Микросхема имеет два разных входа для управления состоянием питания: SLEEP и ENBL. Подробные сведения об этих состояниях питания см. В таблице данных. Обратите внимание, что драйвер подтягивает вывод SLEEP к низкому уровню через внутренний понижающий резистор 500 кОм, и он подтягивает вывод ENBL к низкому уровню через внутренний понижающий резистор 200 кОм.Состояние SLEEP по умолчанию не позволяет драйверу работать; этот вывод должен иметь высокий уровень, чтобы активировать драйвер (он может быть подключен напрямую к логическому «высокому» напряжению от 2,5 до 5,5 В, или им можно динамически управлять, подключив его к цифровому выходу микроконтроллера). Состояние вывода ENBL по умолчанию — активировать драйвер, поэтому этот вывод можно оставить отключенным.
| Схема выводов nSLEEP и nFAULT на держателях DRV8824 / DRV8825 / DRV8834. |
|---|
DRV8834 также имеет выход FAULT, который устанавливает низкий уровень всякий раз, когда полевые транзисторы H-моста отключены в результате защиты от перегрузки по току или теплового отключения, или когда блокировка минимального напряжения отключает микросхему. Плата-носитель соединяет этот вывод с выводом SLEEP через резистор 10 кОм, который действует как подтягивание НЕИСПРАВНОСТИ всякий раз, когда SLEEP внешне удерживается на высоком уровне, поэтому внешнее подтягивание на выводе НЕИСПРАВНОСТЬ не требуется. Обратите внимание, что несущая панель включает в себя защитный резистор 1,5 кОм, последовательно соединенный с выводом FAULT, что позволяет безопасно подключать этот вывод напрямую к источнику логического напряжения, что может произойти, если вы используете эту плату в системе, разработанной для совместимого по выводам A4988. перевозчик.В такой системе резистор 10 кОм между SLEEP и FAULT будет затем действовать как подтягивающий для SLEEP, что делает носитель DRV8834 более прямой заменой A4988 в таких системах (A4988 имеет внутреннее подтягивание в SLEEP штырь). Чтобы не допустить сбоев в работе вывода SLEEP, любой внешний подтягивающий резистор, который вы добавляете к входу вывода SLEEP, не должен превышать 4,7 кОм.
Дополнительные контактные перемычки
Вывод CONFIG на DRV8834 может использоваться для выбора между его режимом индексатора по умолчанию, который предназначен для управления шаговыми двигателями, и режимом чередования фаз / включения, который может использоваться для управления двумя щеточными двигателями постоянного тока.Он недоступен по умолчанию (во избежание конфликтов при использовании держателя DRV8834 в качестве замены для других наших держателей драйверов шагового двигателя), но его можно подключить к контакту с надписью «(CFG)» путем перемычки поверхностного монтажа. перемычка указана на картинке ниже. Вторую перемычку можно установить перемычкой, чтобы опорное напряжение ограничения тока было доступно на контакте с меткой «(REF)».
Ограничение тока
Для достижения высокой скорости шага мощность двигателя обычно выше, чем было бы допустимо без ограничения активного тока.Например, типичный шаговый двигатель может иметь максимальный номинальный ток 1 А с сопротивлением катушки 5 Ом, что указывает на максимальное питание двигателя 5 В. Использование такого двигателя с 9 В позволит увеличить скорость шага, но ток должен активно быть ограничен до менее 1 А, чтобы предотвратить повреждение двигателя.
DRV8834 поддерживает такое активное ограничение тока, а подстроечный потенциометр на плате может использоваться для установки ограничения тока. Обычно вам нужно установить ограничение тока драйвера на уровне или ниже номинального тока вашего шагового двигателя.Один из способов установить ограничение тока — это перевести драйвер в полношаговый режим и измерить ток, протекающий через одну катушку двигателя, без синхронизации входа STEP. Измеренный ток будет в 0,7 раза больше предельного тока (поскольку обе катушки всегда включены и ограничены примерно 70% от установленного предела тока в полношаговом режиме).
Другой способ установить ограничение тока — измерить напряжение на выводе «ref» и вычислить результирующее ограничение тока (резисторы измерения тока 0.100 Ом ). Напряжение на выводе ref доступно через переходное отверстие, обведенное кружком на нижней шелкографии печатной платы, или на вывод, помеченный «(REF)», если подключена соответствующая перемычка для поверхностного монтажа (см. Выше). Ограничение тока относится к опорному напряжению следующим образом:
Ограничение по току = VREF × 2
Так, например, если у вас есть шаговый двигатель с номиналом 1 А, вы можете установить ограничение тока на 1 А, установив опорное напряжение на 0,5 В.
Примечание: Ток катушки может сильно отличаться от тока источника питания, поэтому не следует использовать ток, измеренный на источнике питания, для установки ограничения тока.Подходящее место для установки измерителя тока — это последовательно с одной из катушек шагового двигателя.
Рекомендации по рассеиванию мощности
ИС драйвера DRV8834 имеет максимальный номинальный постоянный ток 1,5 А на катушку, и в наших тестах эта несущая плата была способна обеспечивать номинальный ток в течение многих минут без необходимости дополнительного охлаждения. DRV8834 может поддерживать пиковые токи до 2,2 А на катушку, но его защита от перегрузки по току может сработать при токах до 2 А, а фактический ток, который вы можете подать, зависит от того, насколько хорошо вы можете поддерживать охлаждение ИС.Печатная плата носителя предназначена для отвода тепла от ИС, но для подачи более 1,5 А на катушку требуется радиатор или другой метод охлаждения.
Этот продукт может нагреться до и достаточно, чтобы обжечься задолго до того, как чип перегреется. Будьте осторожны при обращении с этим продуктом и другими подключенными к нему компонентами.
Обратите внимание, что измерение тока, потребляемого источником питания, обычно не дает точного измерения тока катушки.Поскольку входное напряжение для драйвера может быть значительно выше, чем напряжение катушки, измеренный ток на источнике питания может быть немного ниже, чем ток катушки (драйвер и катушка в основном действуют как импульсный понижающий источник питания). Кроме того, если напряжение питания очень высокое по сравнению с тем, что требуется двигателю для достижения заданного тока, рабочий цикл будет очень низким, что также приведет к значительным различиям между средним и среднеквадратичным токами. Кроме того, обратите внимание, что ток катушки является функцией установленного ограничения тока, но он не обязательно равен установленному пределу тока .Фактический ток через каждую катушку изменяется с каждым микрошагом. См. Техническое описание DRV8834 для получения дополнительной информации.
Принципиальная схема
| Принципиальная схема держателя низковольтного шагового двигателя DRV8834. |
|---|
Эту схему также можно загрузить в формате pdf (105k pdf).
Ключевые различия между DRV8834 и A4988
Держатель DRV8834 был спроектирован так, чтобы быть максимально похожим на наши держатели драйверов шагового двигателя A4988, и его можно использовать в качестве замены держателя A4988 во многих приложениях, поскольку он имеет тот же размер, распиновку и общий контроль интерфейс.Однако следует отметить несколько различий между двумя модулями:
| DRV8834 Держатель низковольтного шагового двигателя. |
|---|
| A4988 Держатель драйвера шагового двигателя, Black Edition (показан с оригинальными зелеными резисторами считывания тока 50 мОм). |
|---|
- Вывод, используемый для подачи логического напряжения на A4988, используется как выход FAULT DRV8834, поскольку DRV8834 не требует питания логики (а A4988 не имеет выхода неисправности).Обратите внимание, что безопасно подключать вывод FAULT непосредственно к источнику логики (между выводом IC и выводом есть резистор 1,5 кОм для его защиты), поэтому модуль DRV8834 можно использовать в системах, разработанных для A4988, которые маршрутизируют логику мощность к этому контакту.
- Вывод SLEEP на DRV8834 не подтягивается по умолчанию, как на A4988, но несущая плата подключает его к выводу FAULT через резистор 10 кОм. Следовательно, системы, предназначенные для A4988, которые направляют логическое питание на вывод FAULT, будут эффективно иметь подтягивание 10k на выводе SLEEP.
- Потенциометр ограничения тока находится в другом месте.
- Отношение между настройкой ограничения тока и напряжением опорного вывода другое.
- DRV8834 предлагает 1/32 шага микрошага; A4988 опускается только до 1/16 шага.
- DRV8834 имеет только два контакта для установки микрошагового режима; у A4988 их три. Таблица выбора шага различается для DRV8834 и A4988 для всех разрешений микрошага, кроме полушагового и полушагового режимов.На DRV8834 вывод M0 необходимо оставить в плавающем (высокоомном) состоянии, чтобы выбрать некоторые из микрошаговых режимов. Режим микрошага по умолчанию на DRV8834 — 1/4 шага, в то время как режим микрошага по умолчанию на A4988 — полный шаг.
- DRV8834 не имеет входа RESET.
- Контакты на держателе DRV8834, соответствующие контактам MS3 и RESET держателя A4988, по умолчанию отключены. Если электрическая совместимость с держателем A4988 не вызывает беспокойства, два разных сигнала (CONFIG и VREF) на держателе DRV8834 могут быть подключены к этим контактам с помощью перемычек для поверхностного монтажа (описанных в разделе «Дополнительные перемычки с контактами» выше).
- Требования к синхронизации для минимальной длительности импульса на выводе STEP различны для двух драйверов. В DRV8834 каждый шаговый импульс высокого и низкого уровня должен составлять не менее 1,9 мкс; при использовании A4988 они могут составлять всего 1 мкс.
- DRV8834 поддерживает более низкие напряжения питания, чем A4988, но его максимальное напряжение питания также ниже (2,5–10,8 В против 8–35 В).
- DRV8834 может выдавать больше тока, чем A4988, без какого-либо дополнительного охлаждения (на основе наших полных тестов: 1.5 А на катушку для DRV8834 против 1,2 А на катушку для A4988 Black Edition и 1 А на катушку для оригинального держателя A4988).
- DRV8834 использует другое соглашение об именах для выходов шагового двигателя, но они функционально такие же, как соответствующие контакты на держателе A4988, поэтому одинаковые подключения к обоим драйверам приводят к одинаковому поведению шагового двигателя. На обеих платах первая часть этикетки идентифицирует катушку (так что у вас есть катушки «A» и «B» на DRV8834 и катушки «1» и «2» на A4988).
- Для тех, кто работает с чувствительными к цвету приложениями, обратите внимание, что носитель DRV8834 белый.
Таким образом, носитель DRV8834 достаточно похож на наши носители A4988, поэтому минимальная схема подключения для A4988 является допустимым альтернативным способом подключения DRV8834 к микроконтроллеру:
| Альтернативная минимальная электрическая схема для подключения микроконтроллера к держателю драйвера шагового двигателя DRV8834 (1/4 шаговый режим). |
|---|
Люди часто покупают этот товар вместе с:
Pololu High-Power Stepper Motor Driver 36v4
Обзор
| Pololu High Power Stepper Motor Driver 36v4, вид снизу с размерами. |
|---|
| Драйвер шагового двигателя высокой мощности Pololu 36v4, вид сверху. |
|---|
Драйвер высокомощного шагового двигателя Pololu 36v4 сочетает в себе микросхему драйвера шагового двигателя DRV8711 от Texas Instruments с внешними полевыми МОП-транзисторами для управления большими биполярными шаговыми двигателями при рабочем напряжении от 8 до 50 В.DRV8711 имеет множество настраиваемых параметров, поэтому см. Техническое описание DRV8711 для подробного объяснения его функций и способов их использования (у нас также есть библиотека Arduino, которая упрощает начало работы, предоставляя базовые функции для настройки и управления драйвером).
Мощность драйвера зависит от внешних двойных H-мостов, которые позволяют драйверу обеспечивать непрерывный ток до 4 А на фазу без какого-либо дополнительного охлаждения, такого как радиаторы или принудительный поток воздуха.(При достаточном дополнительном охлаждении драйвер может поддерживать токи примерно до 6 А на фазу; дополнительную информацию, в том числе важную информацию о безопасном использовании этого продукта, см. В разделе «Анализ рассеиваемой мощности » ниже).
Основные характеристики
- Широкий диапазон рабочего напряжения от 8 В до 50 В
- Высокая мощность: может обеспечивать до 4 А непрерывно на фазу без дополнительного охлаждения (макс.6 А при достаточном дополнительном охлаждении)
- Широкие возможности настройки через интерфейс SPI
- Дополнительные штыри управления STEP / DIR (пошаговое управление также можно контролировать только через интерфейс SPI)
- Девять различных шагов разрешения вплоть до 256 микрошагов: полный шаг, полушаг, 1/4 шага, 1/8 шага, 1/16 шага, 1/32 шага, 1/64 шага, 1 / 128-шаговый и 1/256-шаговый
- Регулируемое управление током позволяет вам установить максимальный выходной ток, позволяя использовать напряжения, превышающие номинальное напряжение вашего шагового двигателя, для достижения более высокой скорости шага.
- Адаптивное время гашения, регулируемое время затухания и различные режимы затухания тока позволяют создавать сверхплавные профили движения через интерфейс SPI.
- Дополнительный выход STALL позволяет обнаруживать остановку при микрошаге
- Дополнительный выход BEMF обеспечивает более совершенные алгоритмы управления и обнаружения останова на основе обратной ЭДС шагового двигателя Драйвер
- поддерживает альтернативный режим работы для управления двумя щеточными двигателями постоянного тока с входами PWM вместо одного биполярного шагового двигателя с входами STEP / DIR.
- Входы, совместимые с 1.Логика 8 В, 3,3 В и 5 В
- Все цифровые выходы имеют открытый сток с подтягиванием к внешнему напряжению IOREF для использования с системами, отличными от 5В (IOREF может быть подключен к соседнему выводу 5V OUT для использования с системами 5V).
- Блокировка пониженного напряжения, защита от перегрузки по току, защита от короткого замыкания и защита от обратного напряжения (до 40 В) Доступна библиотека Arduino
- и примеры эскизов, которые предоставляют основные функции для настройки и работы с драйвером
В качестве альтернативы этому драйверу шагового двигателя наш многоинтерфейсный USB-контроллер высокомощного шагового двигателя Tic 36v4 имеет аналогичные характеристики мощности и предлагает интерфейсы высокого уровня (USB, последовательный TTL, I²C, аналоговое напряжение, квадратурный энкодер и RC импульсные сервоприводы для хобби), которые упрощают использование в некоторых приложениях.Программное обеспечение для настройки Tic позволяет изменять многие настройки драйвера через USB, устраняя необходимость напрямую использовать SPI для настройки DRV8711.
Обновление от 19 сентября 2019 г .: В настоящее время мы поставляем небольшую версию (md38b) с улучшенным шумом и отказоустойчивостью при высоких входных напряжениях и высоких ограничениях по току.
Оборудование в комплекте
В комплект поставки данного продукта входят все компоненты для поверхностного монтажа, как показано на рисунке продукта. Однако для сборки входящих в комплект деталей со сквозным отверстием требуется пайка.В комплект входят следующие детали для сквозных отверстий:
Штыревые разъемы 0,1 ″ могут быть сломаны или разрезаны на более мелкие части по желанию и впаяны в меньшие сквозные отверстия. Эти разъемы совместимы с беспаечными макетными платами, 0,1-дюймовыми гнездовыми разъемами, а также с нашими премиальными и предварительно обжатыми перемычками. Клеммные колодки можно впаять в большие отверстия, чтобы обеспечить удобное временное подключение проводов питания и двигателя без оконечной нагрузки (см. Наше короткое видео по установке клеммной колодки).Вы также можете припаять провода двигателя и другие соединения непосредственно к плате для наиболее компактной установки.
| |
|
Использование драйвера
Распиновка
| PIN | Описание |
|---|---|
| VIN | Подключение питания платы от 8 В до 50 В (с обратной защитой до 40 В). |
| ВМ | Этот вывод дает доступ к источнику питания двигателя после полевого МОП-транзистора с защитой от обратного напряжения (см. Схему платы внизу этой страницы). Его можно использовать для подачи питания с обратной защитой на другие компоненты системы. Этот вывод также можно использовать с соседним выводом GND для добавления внешнего электролитического конденсатора в системах, где может быть полезна дополнительная байпасная емкость. |
| ЗЕМЛЯ | Точки подключения заземления для источника питания двигателя и контрольного заземления.Источник управления и драйвер двигателя должны иметь общую землю. |
| AOUT1 | Выход двигателя: «положительный» конец катушки фазы А. |
| AOUT2 | Выход двигателя: «отрицательный» конец катушки фазы А. |
| BOUT1 | Выход двигателя: «положительный» конец катушки фазы B. |
| BOUT2 | Выход двигателя: «отрицательный» конец катушки фазы B. |
| V5 (ВЫХОД) | Регулируемый выход 5 В: этот вывод дает доступ к напряжению от внутреннего регулятора DRV8711.Стабилизатор может обеспечить только ток до 10 мА, поэтому он в первую очередь полезен только для высоких входов платы с жесткой проводкой и подтягивания питания для выходов с открытым стоком на плате. Обычно он не предназначен для питания внешних устройств. |
| IOREF | Все сигнальные выходы платы (кроме BEMF) являются выходами с открытым стоком, подтянутыми до IOREF, поэтому на этот вывод должно подаваться логическое напряжение системы управления (например, 3,3 В для использования в системах 3,3 В). Для удобства его можно подключить к соседнему выводу V5 (OUT), когда он используется в системе 5 В. |
| ШАГ / AIN1 | Изменения на этом входе перемещают ток двигателя на одну ступень вверх или вниз в таблице транслятора (даже когда двигатель отключен). Пошаговым режимом также можно управлять через интерфейс SPI, поэтому этот вывод не является обязательным. В режиме внешнего ШИМ этот вывод работает как AIN1, а не как STEP, и напрямую контролирует состояние выхода AOUT1. |
| DIR / AIN2 | Вход, определяющий направление вращения шагового двигателя.Направление также можно контролировать через интерфейс SPI, поэтому этот вывод не является обязательным. В режиме внешнего ШИМ этот вывод работает как AIN2, а не как DIR, и напрямую контролирует состояние выхода AOUT2. |
| SDATO | Вывод данных SPI. (Этот вывод также часто называют «MISO».) Этот вывод является выходом с открытым стоком и подтянут к IOREF на плате. |
| SDATI | Ввод данных SPI. (Этот вывод также часто называют «MOSI».) |
| SCLK | тактовый вход SPI. |
| SCS | Вход выбора микросхемы SPI. Логические переходы на этом выводе необходимы для связи SPI, даже если это единственное устройство на шине SPI. |
| СОН | По умолчанию драйвер устанавливает на этот вывод низкий уровень, что переводит его в спящий режим с низким энергопотреблением, когда схема драйвера двигателя отключена, а все аналоговые схемы переводятся в состояние низкого энергопотребления. Цифровая схема по-прежнему работает в спящем режиме, поэтому доступ к регистрам устройства по-прежнему можно получить через последовательный интерфейс.Этот штифт должен быть установлен высоко, чтобы включить устройство. |
| СБРОС | Вход сброса микросхемы. Высокий логический уровень на этом входе сбрасывает всю внутреннюю логику, включая регистры индексатора и устройства, и отключает выходы драйвера. Примечание: контакт RESET не работает, пока устройство находится в спящем режиме. |
| НЕИСПРАВНОСТЬ | Выход с открытым стоком, который переходит в низкий уровень при возникновении неисправности из-за перегрузки по току, предварительного драйвера, перегрева или пониженного напряжения. Этот штифт подтянут к IOREF, что по умолчанию делает его высоким. |
| БИН1 | В режиме внешней ШИМ BIN1 напрямую управляет состоянием выхода BOUT1. Этот вывод не используется в режиме индексатора (т. Е. При использовании этого устройства в качестве драйвера шагового двигателя). |
| БИН2 | В режиме внешней ШИМ BIN2 напрямую управляет состоянием выхода BOUT2. Этот вывод не используется в режиме индексатора (т. Е. При использовании этого устройства в качестве драйвера шагового двигателя). |
| СТОЛБ / БЭМФВ | Выход с открытым стоком, подтянутый к IOREF на плате.В режиме обнаружения внутреннего опрокидывания выходной сигнал становится низким при обнаружении опрокидывания. В режиме обнаружения внешнего опрокидывания выходной сигнал становится низким, когда доступно действительное измерение обратной ЭДС. |
| БЭМФ | Аналоговый выход, представляющий противо-ЭДС двигателя. Сигнал на этом выводе может быть дополнительно обработан микроконтроллером для реализации более совершенных алгоритмов управления и обнаружения останова. |
Дополнительную информацию об этих выводах см. В таблице данных DRV8711.
При высоких входных напряжениях (особенно выше 30 В) и высоких предельных значениях тока на интерфейс SPI драйвера с большей вероятностью будут влиять электрические помехи от драйвера и шагового двигателя, что может привести к ошибкам связи. Вы можете уменьшить эти помехи с помощью тщательной проводки и экранирования, и вы можете снизить риск неожиданного поведения, приняв соответствующие меры предосторожности при обмене данными по SPI (например, считайте и проверьте параметры конфигурации после их записи и избегайте настройки драйвера, пока выходы двигателя не работают). включено).
В качестве альтернативы, рассмотрите возможность использования нашего многоинтерфейсного USB-контроллера мощного шагового двигателя Tic 36v4, который предоставляет высокоуровневые интерфейсы для настройки и управления (делая ненужным прямую связь SPI).
Общая типовая электрическая схема
| Типовая схема подключения микроконтроллера к драйверу мощного шагового двигателя Pololu 36v4. |
|---|
Хотя драйвер высокомощного шагового двигателя 36v4 позволяет управлять шаговым двигателем через простой интерфейс шага и направления, его необходимо сначала включить и настроить через интерфейс SPI после каждого включения питания.Это означает, что управляющий микроконтроллер должен быть способен действовать как мастер SPI (либо с периферийным SPI, либо с программным SPI), и он должен быть подключен к контактам SDATI, SCLK и SCS. Хотя выводы SDATO и FAULT не требуются для использования этого драйвера, обычно рекомендуется использовать их для отслеживания состояний ошибок.
Типовая электрическая схема (только для систем 5 В)
| Типовая схема подключения микроконтроллера с логическим напряжением 5 В к драйверу мощного шагового двигателя Pololu 36v4. |
|---|
Драйвер мощного шагового двигателя 36v4 имеет внутренний регулятор 5 В, который можно использовать для питания IOREF в тех случаях, когда плата используется в системах с напряжением 5 В. Мы предоставляем перемычку для подключения V5 к IOREF, или для более компактного соединения вы можете перемыть перемычку для поверхностного монтажа, расположенную рядом с этими контактами (выделено на рисунке ниже).
| Перемычка для установки на поверхность контактов V5 и IOREF на драйвере мощного шагового двигателя Pololu 36v4. |
|---|
Библиотека Arduino и пример кода
| Управление драйвером мощного шагового двигателя Pololu 36v4 с помощью Arduino-совместимого # 3104 A-Star 32U4 Mini SV. |
|---|
Мы написали библиотеку драйвера мощного шагового двигателя для Arduino, которая предоставляет базовые функции для настройки и управления драйвером с использованием контроллера, совместимого с Arduino или Arduino. В библиотеке есть несколько примеров скетчей.
Рекомендации по рассеиванию мощности
Драйвер мощного шагового двигателя 36v4 может обеспечивать до 4 А непрерывно на фазу в типичных условиях, но фактический ток, который он может выдавать, будет зависеть от того, насколько хорошо вы можете поддерживать модуль в холодном состоянии. Печатная плата драйвера предназначена для отвода тепла от полевых МОП-транзисторов, но производительность можно улучшить, добавив радиатор или принудительный поток воздуха. (И наоборот, производительность будет снижена в приложениях, которые ограничивают рассеивание тепла, например при высоких температурах окружающей среды или работе в закрытых помещениях.) При достаточном дополнительном охлаждении драйвер может выдавать до 6 А на фазу до превышения номинальной мощности 1 Вт резисторов считывания тока 30 мОм.
Ограничение тока драйвера устанавливается через его интерфейс SPI. Вы можете подтвердить, что установили его правильно, измерив с помощью мультиметра фактический ток через одну из катушек, когда шаговый двигатель находится в полношаговом режиме, а не в пошаговом режиме. Ток, который вы измеряете таким образом, будет примерно 70% установленного предела. Обратите внимание, что измерение тока, потребляемого источником питания, обычно не дает точного измерения тока катушки.Поскольку входное напряжение для драйвера может быть значительно выше, чем напряжение катушки, измеренный ток на источнике питания может быть немного ниже, чем ток катушки (драйвер и катушка в основном действуют как импульсный понижающий источник питания). Кроме того, если напряжение питания очень высокое по сравнению с тем, что требуется двигателю для достижения заданного тока, рабочий цикл будет очень низким, что также приведет к значительным различиям между средним и среднеквадратичным токами.
Предупреждение: Этот драйвер двигателя не имеет значимого отключения при перегреве (в то время как микросхема DRV8711 имеет защиту от перегрева, в первую очередь перегреваются внешние полевые МОП-транзисторы). Состояние перегрева может привести к необратимому повреждению привода двигателя. Мы настоятельно рекомендуем вам не увеличивать уставку ограничения тока выше 4 А (или ниже в приложениях с пониженным тепловыделением), если вы не подтвердите, что температура полевых МОП-транзисторов будет ниже 140 ° C.
Примечание: При включении драйвера настройка ограничения тока по умолчанию устанавливается на максимум (~ 18 А). Убедитесь, что вы установили что-то подходящее как для вашего шагового двигателя, так и для драйвера, прежде чем активировать выходы!
Этот продукт может нагреться до и достаточно, чтобы обжечься задолго до того, как чип перегреется.Будьте осторожны при обращении с этим продуктом и другими подключенными к нему компонентами.
Принципиальная схема
| Принципиальная схема драйвера мощного шагового двигателя Pololu 36v4. |
|---|
Эта диаграмма также доступна в виде загружаемого файла в формате pdf (117k pdf).
Драйвер шагового двигателя | Дешевый лучший драйвер шагового двигателя оптом …
Что такое драйвер шагового двигателя?
Драйвер шагового двигателя — это привод, который может преобразовывать импульсный сигнал в сигнал углового смещения. Драйверы шагового двигателя приводят в действие шаговые двигатели для вращения на угол, называемый углом шага, в заданном направлении при получении импульсного сигнала.Скорость двигателя соответствует частоте импульсов, заданной контроллером, а смещение определяется количеством импульсов, подаваемым контроллером. Шаговая система состоит из шагового двигателя и шагового драйвера. Производительность шаговой системы зависит не только от двигателя, но и от шагового драйвера.
Типы драйверов шагового двигателя
STEPPERONLINE предлагает три типа драйверов шагового двигателя:
Цифровой драйвер шагового двигателя
Цифровой драйвер шагового двигателя разработан с усовершенствованным алгоритмом управления DSP на основе новейшей технологии управления движением.Это идеальный выбор для решений с шаговыми двигателями. Его высокое качество, высокая производительность и длительный срок службы впечатляют многих клиентов.
Подробнее ►
Шаговый драйвер с замкнутым контуром
Шаговый драйвер с замкнутым контуром работает с шаговыми двигателями с замкнутым контуром с энкодером для получения сигнала положения. Он обеспечивает более высокие диапазоны пикового крутящего момента на высокой скорости и большую производительность машины, а также более тихую работу и меньшее энергопотребление.
Подробнее ►
Интегрированный шаговый драйвер
Интегрированный шаговый драйвер — драйверы, которые можно установить на шаговые двигатели.Самым большим преимуществом встроенного шагового двигателя является пространство и большая надежность. В настоящее время STEPPERONLINE предлагает три типа интегрированных шаговых двигателей:
b. Шаговый двигатель + шаговый драйвер + контроллер
c. Шаговый двигатель + шаговый драйвер + кодировщик
STEPPERONLINE всегда предлагает драйверы шагового двигателя лучшего качества по лучшей цене. Если у вас есть какие-либо вопросы о том, как выбрать подходящий драйвер шагового двигателя, свяжитесь с нами.Мы всегда готовы дать вам наиболее подходящую рекомендацию.
Сортировать по: Имя по умолчанию (A — Z) Имя (Z — A) Цена (Низкая> Высокая) Цена (Высокая> Низкая) Рейтинг (Наивысшая) Оценка (Самая низкая) Модель (A — Z) Модель (Z — A)
Показать: 20255075100
-22%
SKU: DM320T 17,00 $ 13,30 $ Начиная с: 12,70 $
-21%
SKU: DM332TЭто цифровой шаговый привод, реализованный с использованием передовой технологии управления шаговым двигателем.Он прост в использовании и может использоваться для плавного управления 2-фазными и 4-фазными двигателями (от Nema 17-Nema 23) с меньшим нагревом и шумом. Работает ..
19,50 15,50 $ Начиная с: 14,82 $
В основном используется в медицинском оборудовании, дозирующих машинах, гравировальных станках, лазерном оборудовании, этикетировочных машинах, электронном оборудовании, рекламном оборудовании и другом оборудовании автоматизации. Особенно эффективен в применении ..
16 $.24 Начиная с: 14,33 $
-20%
Артикул: DM542T 25,00 $ 19,90 $ Начиная с: 19,05 $
В основном используется в медицинском оборудовании, дозирующих машинах, гравировальных машинах, лазерном оборудовании, этикетировочных машинах, электронном оборудовании , рекламное оборудование и другое оборудование автоматизации. Особенно эффективен в применении ..
24,36 $ Начиная с: 21,50 $
-21%
Артикул: DM556T 28 $.00 22,05 $ Начиная с: 21,18 $
-20%
Артикул: DM860I 40,50 $ 32,31 $ Начиная с: 30,92 $
В основном используется в медицинском оборудовании, дозирующих машинах, гравировальных машинах, лазерном оборудовании, этикетировочных машинах, электронное оборудование, рекламное оборудование и другое оборудование для автоматизации. Особенно эффективен в применении.
27,07 $ Начиная с: 23,88 $
-20%
Артикул: DM860T 46 $.50 37,40 $ Начиная с: 35,79 $
В основном используется в медицинском оборудовании, дозирующих машинах, гравировальных станках, лазерном оборудовании, этикетировочных машинах, электронном оборудовании, рекламном оборудовании и другом оборудовании автоматизации. Он особенно эффективен в применении ..
40,60 $ Начиная с: 35,83 $
Артикул: CL57T43,31 $ Начиная с: 38,22 $
Артикул: CL86T56,85 $ Начиная с: 50 $.16
Артикул: ISD02ISD02 — это серия миниатюрных высокопроизводительных драйверов шагового двигателя с параллельным портом управления. Самая большая особенность — небольшой размер и высокая управляемость. Его толщина менее 14 мм. Их можно установить непосредственно на ..
25,48 $ Всего: 21,50 $
SKU: ISD04ISD04 — это серия миниатюрных высокопроизводительных драйверов шагового двигателя с параллельным портом управления. Самая большая особенность — небольшой размер и высокая управляемость.Его толщина составляет менее 14 мм. Их можно установить непосредственно на NE ..
40,76 $ Всего: 34,39 $
SKU: ISD08ISD08 — это серия миниатюрных высокопроизводительных драйверов шагового двигателя с параллельным портом управления. Самая большая его особенность — небольшой размер и отличная управляемость. Его толщина менее 14 мм. Их можно установить непосредственно на ..
56,05 $ Всего: 47,29 $
-24%
SKU: ISC02ISC02 — это встроенный микропроцессор, регулятор напряжения, миниатюрный контроллер шагового двигателя.Он интегрально разработан для установки на шаговые двигатели и прост в управлении. С ISC02 скорость двигателя можно контролировать с помощью анального ..
26,26 $ 19,99 $ Начиная с: 19,99 $
ISC02 — это встроенный микропроцессор, регулятор напряжения, миниатюрный контроллер шагового двигателя. Он интегрально разработан для установки на шаговые двигатели и прост в управлении. С ISC02 скорость двигателя можно контролировать с помощью анал ..
$ 27.07 Начиная с: 23,09 $
SKU: ISC04ISC04 — это встроенный микропроцессор, регулятор напряжения, миниатюрный контроллер шагового двигателя. Он интегрально разработан для установки на шаговые двигатели и прост в управлении. С ISC04 скорость двигателя можно контролировать с помощью анального ..
40,60 $ Всего: 34,63 $
SKU: ISC08ISC08 — это встроенный микропроцессор, регулятор напряжения, миниатюрный контроллер шагового двигателя. Он интегрально разработан для установки на шаговые двигатели и прост в управлении.С ISC08 скорость двигателя можно контролировать с помощью аналогового ..
59,55 $ Всего: 50,79 $
Шаговые двигатели, драйверы шаговых двигателей, контроллеры шаговых двигателей и шаговые двигатели с контролем скорости
Шаговые двигатели позволяют легко и точно позиционировать. Они используются в различных типах оборудования для точного контроля угла поворота и скорости с помощью импульсных сигналов. Шаговые двигатели генерируют высокий крутящий момент с компактным корпусом и идеально подходят для быстрого ускорения и реакции.Шаговые двигатели также сохраняют свое положение при остановке благодаря своей механической конструкции. Решения с шаговыми двигателями состоят из драйвера (принимает импульсные сигналы и преобразует их в движение двигателя) и шагового двигателя.
Oriental Motor предлагает множество решений для самых разных сфер применения:
- Шаговые двигатели AlphaStep с замкнутым контуром, 2-фазные шаговые двигатели, 5-фазные шаговые двигатели
- Опции с редуктором, энкодером и электромагнитным тормозом
- Драйверы шаговых двигателей переменного или постоянного тока
- Размеры рамы от 0.От 79 дюймов (20 мм) до 3,54 дюйма (90 мм)
Подробнее …
Шаговые двигатели (только двигатели)
Oriental Motor предлагает широкий спектр шаговых двигателей, включая; Шаговые двигатели AlphaStep с обратной связью, 2-фазные шаговые двигатели и 5-фазные шаговые двигатели доступны в размерах от 0,79 дюйма (20 мм) до 3,54 дюйма (90 мм). Предлагаются пять вариантов шаговых двигателей редукторного типа, опции энкодера и тормоза, а также различные обмотки двигателя.
- 0.79 ~ 3,54 дюйма (20 ~ 90 мм) Шаговые двигатели NEMA 8 ~ NEMA 34 типоразмера
- Доступны цилиндрические шестерни без люфта, с низким люфтом и цилиндрические шестерни
- Шаговые двигатели AlphaStep с замкнутым контуром, 2-фазные шаговые двигатели и 5-фазные шаговые двигатели
- Опции энкодера и электромагнитного тормоза
Драйверы шагового двигателя
Драйверы шагового двигателя преобразуют импульсные сигналы от контроллера в движение двигателя для достижения точного позиционирования.
- Вход переменного или постоянного тока
- Драйверы шаговых двигателей AlphaStep с замкнутым контуром, 2-фазных шаговых двигателей или 5-фазных шаговых двигателей
- Импульсный вход, встроенный контроллер или EtherNet / IP ™, EtherCAT, PROFINET Совместимые версии
- Доска или коробка типа
EtherNet / IP ™ является товарным знаком ODVA
.Шаговые двигатели и драйверы с регулировкой скорости
Система управления скоростью SC серии CVK предлагает простую конфигурацию, состоящую из шагового двигателя, драйвера и программируемого контроллера.Рабочую скорость, время ускорения и замедления, рабочий ток можно установить с помощью переключателей привода, а простое переключение входа FWD (RVS) в положение ON или OFF позволяет легко управлять.
- Генератор импульсов не требуется
- Возможны 2 настройки скорости
- Компактный шаговый двигатель с высоким крутящим моментом
Контроллеры / Сетевые шлюзы
Контроллеры и сетевые шлюзы для использования с системами управления движением.
- Контроллеры для использования с драйверами импульсного ввода Сетевые преобразователи / шлюзы
- (связь RS-485)
- EtherCat
- CC-Link
- MECHATROLINK
Шаговые двигатели и драйверы
Шаговый двигатель используется для достижения точного позиционирования с помощью цифрового управления.Двигатель работает за счет точной синхронизации с выходным импульсным сигналом от контроллера к драйверу. Шаговые двигатели с их способностью создавать высокий крутящий момент на низкой скорости при минимальной вибрации идеально подходят для приложений, требующих быстрого позиционирования на короткое расстояние.
Точное позиционирование за шаг
Шаговый двигатель вращается с фиксированным углом шага, как секундная стрелка часов. Этот угол называется «углом основного шага». Oriental Motor предлагает шаговые двигатели с базовым углом шага 0.36 °, 0,72 °, 0,9 ° и 1,8 °. 5-фазные шаговые двигатели имеют угол поворота 0,36 ° и 0,72 °, а 2-фазные шаговые двигатели — 0,9 ° и 1,8 °.
Используя технологию гибридного шагового двигателя
Гибридный шаговый двигатель представляет собой комбинацию двигателей с переменным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного шагового двигателя намагничен в осевом направлении, как шаговый двигатель с постоянным магнитом, а на статор подается электромагнитное питание, как у шагового двигателя с переменным магнитным сопротивлением.И статор, и ротор имеют несколько зубьев.
Гибридный шаговый двигатель имеет намагниченный в осевом направлении ротор, что означает, что один конец намагничен как северный полюс, а другой конец — как южный полюс. Чашки зубчатого ротора размещены на каждом конце магнита, и чашки смещены на половину шага зубьев.
Простое управление с помощью импульсных сигналов
Конфигурация системы для высокоточного позиционирования показана ниже. Угол поворота и скорость шагового двигателя можно контролировать с высокой точностью с помощью импульсных сигналов от контроллера.
Что такое импульсный сигнал?
Импульсный сигнал — это электрический сигнал, уровень напряжения которого многократно меняется между ВКЛ и ВЫКЛ. Каждый цикл включения / выключения считается одним импульсом. Команда с одним импульсом заставляет выходной вал двигателя поворачиваться на один шаг. Уровни сигнала, соответствующие состояниям включения и выключения напряжения, обозначаются как «H» и «L» соответственно.
Величина вращения пропорциональна количеству импульсов
Величина вращения шагового двигателя пропорциональна количеству импульсных сигналов (количеству импульсов), подаваемых драйверу.Взаимосвязь вращения шагового двигателя (угла поворота выходного вала двигателя) и количества импульсов выражается следующим образом:
Скорость пропорциональна скорости импульса
Скорость шагового двигателя пропорциональна скорости импульсных сигналов (частоты импульсов), подаваемых водителю. Соотношение скорости импульса [Гц] и скорости двигателя [об / мин] выражается следующим образом:
Создание высокого крутящего момента с помощью компактного корпуса
Шаговые двигатели создают высокий крутящий момент в компактном корпусе.Эти особенности обеспечивают им отличное ускорение и реакцию, что, в свою очередь, делает эти двигатели хорошо подходящими для приложений с высокими требованиями к крутящему моменту, когда двигатель должен часто запускаться и останавливаться. Чтобы удовлетворить потребность в увеличении крутящего момента на низкой скорости, Oriental Motor также предлагает мотор-редукторы, сочетающие компактную конструкцию и высокий крутящий момент.
Двигатель удерживается в остановленном положении
Шаговые двигатели продолжают создавать удерживающий момент даже в состоянии покоя.Это означает, что двигатель можно удерживать в остановленном положении без использования механического тормоза.
При отключении питания самоудерживающийся момент двигателя теряется, и двигатель больше не может удерживаться в остановленном положении при вертикальных операциях или при приложении внешней силы. В подъемниках и подобных устройствах используйте тормоз электромагнитного типа.
Шаговые двигатели и драйверы с замкнутым контуром — AlphaStep
AlphaStep состоит из шагового двигателя и драйверов, разработанных для раскрытия максимальных характеристик шагового двигателя.Эти продукты обычно работают синхронно с импульсными командами, но когда происходит внезапное ускорение или изменение нагрузки, уникальный режим управления поддерживает операцию позиционирования. Модели AlphaStep также могут выводить сигналы завершения позиционирования и аварийные сигналы, что повышает надежность оборудования, с которым они работают.
Типы операционных систем
Каждый шаговый двигатель и драйвер объединяют в себе шаговый двигатель, выбранный из различных типов, со специальным драйвером.Доступны драйверы, работающие в режиме импульсного ввода и в режиме встроенного контроллера. Вы можете выбрать желаемую комбинацию в соответствии с требуемой операционной системой.
Драйвер импульсного входа
Двигателем можно управлять с помощью генератора импульсов, предоставленного пользователем. Рабочие данные заранее вводятся в генератор импульсов. Затем пользователь выбирает рабочие данные на главном программируемом контроллере, затем вводит операционную команду.
Драйвер встроенного контроллера
Встроенная функция генерации импульсов позволяет управлять двигателем через подключенный напрямую персональный компьютер или программируемый контроллер.Поскольку отдельный генератор импульсов не требуется, драйверы этого типа экономят место и упрощают электромонтаж.
Разница между характеристиками входа переменного и постоянного тока
Шаговый двигатель приводится в действие напряжением постоянного тока, подаваемым через драйвер. В двигателях и драйверах Oriental Motor с входным напряжением 24 В постоянного тока на двигатель подается 24 В постоянного тока. В двигателях и драйверах на 100-115 В переменного тока на входе выпрямляется постоянный ток, а затем на двигатель подается примерно 140 В постоянного тока (исключение составляют некоторые изделия.)
Эта разница в напряжении, подаваемом на двигатели, проявляется как разница в характеристиках крутящего момента на высоких скоростях. Это связано с тем, что чем выше приложенное напряжение, тем быстрее будет нарастание тока через обмотки двигателя, что облегчает приложение номинального тока на более высоких скоростях. Таким образом, входной двигатель переменного тока и система привода имеют превосходные характеристики крутящего момента в широком диапазоне скоростей, от низких до высоких, обеспечивая большое передаточное отношение.
Рекомендуется, чтобы для вашего приложения были рассмотрены системы двигателя и привода переменного тока, которые совместимы в более широком диапазоне рабочих условий, чем системы ввода постоянного тока.
Драйвер шагового двигателя — Полное объяснение
В этой статье мы попытаемся объяснить все важные вещи о драйвере шагового двигателя , которые вам необходимо знать.
Что такое драйвер шагового двигателя?
Драйвер шагового двигателя — это электронное устройство, которое используется для привода шагового двигателя. Сам по себе он обычно ничего не делает и должен использоваться вместе с таким контроллером, как PoKeys57CNC.
Существует много разных типов драйверов шаговых двигателей, но в целом все они делают одно и то же — перемещают шаговые двигатели.
Нужен ли драйвер для шагового двигателя?
Да. Шаговым двигателям требуются напряжения и / или токи, которые контроллер просто не может произвести. Поэтому нам нужно использовать драйвер шагового двигателя. Это электронное устройство преобразует наши инструкции по движению из контроллера в последовательность, в которой обмотка в шаговом двигателе будет включаться или выключаться, при этом обеспечивая ему достаточную мощность.
Все это мы, конечно, производим с помощью микроконтроллера, управляющего несколькими полевыми транзисторами, но проектирование и программирование потребуют времени.К счастью, есть уже существующие решения.
Если подвести итог, контроллеры в целом представляют собой чисто цифровые устройства с малой выходной мощностью, поэтому мы используем аналоговый силовой каскад в качестве интерфейса между цифровым (контроллер) и механическим (двигатель) миром.
Как работают драйверы шагового двигателя?
Основная задача драйвера — сформировать соответствующий сигнал из входных данных для перемещения оси двигателя. Наиболее распространенный подход к управлению шаговым двигателем, который мы называем Н-мостом.Схема H-моста состоит из 4 полевых транзисторов с очень низким сопротивлением между стоком и истоком (R DSon ) в активном состоянии. В общем, нам нужно как минимум два H-моста, так как у двигателя минимум две катушки. С помощью правильной комбинации сигналов на затворе полевого транзистора мы контролируем направление тока через катушку двигателя. Переменное возбуждение двух обмоток вызывает смещение оси двигателя.
Прямое и обратное движение катушкиКак выбрать драйвер шагового двигателя?
При выборе правильного драйвера для нашей системы нам сначала нужна информация о двигателях, которые мы будем использовать.Это основная важная информация. Мы должны выбрать драйвер в соответствии с мощностью шагового драйвера, который может поставлять двигатель. Например, более крупный двигатель, такой как NEMA 34, имеет более высокое значение удерживающего момента, чем меньший NEMA 17. Вот почему NEMA 34 потребляет больше тока, и нам нужен драйвер с более высокой амперной характеристикой.
Следующее, что нужно рассмотреть, это то, как и что мы хотим контролировать в драйвере. Обычно есть настройки на максимальный ток и микрошаги, о которых мы напишем в отдельной главе этой статьи.У нас может быть возможность установить драйвер с перемычками или более сложное программное обеспечение, которое в большинстве случаев позволяет пользователю настраивать также другие специальные параметры, такие как параметры затухания, ограничение температуры защиты, ток холостого хода и так далее.
Некоторые драйверы мы можем использовать только с контроллером, который генерирует сигналы шага и направления. С другой стороны, мы можем использовать разные протоколы связи.
Типы драйверов
Как правило, существует два типа драйверов.Драйверы постоянного напряжения (драйверы L / R) и драйверы постоянного тока (драйверы прерывателя).
- драйверы постоянного напряжения (драйверы L / R):
- они дешевле драйверов постоянного тока
- использовать напряжение для создания крутящего момента
- обычно неэффективно
- хуже по производительности, чем драйверы чоппера
- драйверы постоянного тока (драйверы прерывателя):
- дороже
- более сложные схемы
- использовать постоянный ток для создания крутящего момента
- намного лучшая производительность, чем драйверы L / R
Драйверы постоянного тока используются почти всегда, поскольку существует множество доступных ИС, обеспечивающих гораздо лучшую производительность.Вы можете найти интегральные схемы, которые уже имеют встроенные полевые транзисторы, они обычно предназначены для более низких токов (до пары А). Поскольку они маленькие, может возникнуть проблема с отводом тепла. Если мы используем внешние полевые транзисторы, максимальный ток ограничивается только характеристиками выбранного полевого транзистора и конструкции печатной платы.
Например, PoStep25-32 использует интегральную схему со встроенными полевыми транзисторами и может обеспечивать до 2,5 А, в отличие от PoStep60-256, который использует внешние полевые транзисторы и может обеспечивать до 6 ампер.
Микрошаговый
Шаговые двигатели двигаются с шагом 1,8 °, то есть 200 шагов на оборот. Это может быть проблемой, когда нам нужны небольшие движения. Один из вариантов — использовать какую-то передачу, но есть и другой способ — микрошаговый. Микрошаговый режим означает, что мы можем делать более 200 шагов за один оборот и, в свою очередь, иметь меньшие движения. Эта опция уже встроена в большинство микросхем и может быть настроена простым перемещением перемычки, как на PoStep25-32.
При управлении шаговыми двигателями на полных шагах выходной сигнал драйвера шагового двигателя выглядит как прямоугольный сигнал и производит грубые движения. Чем больше микрошаг, тем больше выходной сигнал выглядит как синусоида, и шаговый двигатель движется более плавно. Но у этого есть обратная сторона. При увеличении значения микрошага крутящий момент значительно падает, и если значение слишком велико, может случиться так, что двигатель не сможет произвести достаточный крутящий момент, чтобы даже повернуться. Обычно 1/4, 1/8 или даже 1/16 могут обеспечивать удовлетворительное плавное движение, при этом обеспечивая достаточный крутящий момент.
На следующем изображении показано, как изменяется выходной сигнал при выборе различных значений микрошага. Вы можете видеть, что выходной сигнал все больше похож на синусоидальную волну.
Так что вообще означают эти значения микрошагов?
Микрошаговый режим сообщает нам, сколько микрошагов должен сделать степпер, чтобы выполнить один полный шаг. Значение 1/1 говорит нам, что шаговый двигатель должен сделать один микрошаг, чтобы произвести один полный шаг (так что микрошага нет). Значение 1/2 называется полушагом и говорит нам, что шаговый двигатель должен сделать 2 микрошага для одного полного шага.Это означает, что шаговый двигатель должен сделать 400 шагов за один полный оборот. Значение 1/8 говорит нам, что двигатель должен сделать 8 микрошагов за один полный шаг и 1600 шагов за один полный оборот. Тот же принцип применяется ко всем значениям микрошага.
Как управлять драйвером шагового двигателя?
Большинство драйверов шаговых двигателей принимают входные сигналы шага и направления. Это означает, что нам нужно только два сигнала для каждого драйвера. Шаговый сигнал используется для создания шагов и выглядит как сигнал ШИМ.Каждый импульс означает, что шаговый двигатель будет двигаться на один шаг (или микрошаг). Сигнал направления используется для обозначения того, в каком направлении (по часовой или против часовой стрелки) будет поворачиваться шаговый двигатель. Есть приложения, в которых мы используем шаговый двигатель независимо, поэтому для управления драйвером используется стандартный протокол связи, такой как MODBUS, USB или I2C.
Конфигурация параметров драйвераКак подключить шаговый двигатель?
, если вы исследовали шаговые двигатели, вы могли заметить, что у них другое количество соединительных проводов.Чаще всего встречаются двигатели с двумя обмотками катушки, 4 проводами. На рисунке ниже вы можете увидеть различные варианты подключения двигателей с 4, 6 или 8 проводами.
Заключение
Мы обнаружили, что драйвер шагового двигателя необходим, если наша конструкция требует использования шагового двигателя, поскольку контроллер не может производить достаточный ток и достаточно высокое напряжение. Существуют разные типы, но драйверы измельчителя обеспечивают лучшую производительность. Также микрошаговый режим предлагает отличное решение на первый взгляд, но создает проблему снижения крутящего момента.Он по-прежнему чрезвычайно полезен, но мы должны использовать его правильно. Существует множество различных микросхем для управления шаговым двигателем, а также множество уже разработанных решений, таких как PoStep25-32 и PoStep60-256, которые обеспечивают решение plug and play и просты в использовании.
И если вы хотите узнать больше, это отличная отправная точка.
p.s .: Статья о драйвере шагового двигателя была оптимизирована для SEO с помощью словенского SEO-фрилансера Seo-Praktik.si.
Похожие сообщения
Руководство пользователя драйвера шагового двигателя — полное…Это руководство пользователя драйвера шагового двигателя содержит информацию, необходимую для …
I2C Extender — I2C для дальней связиPoLabs с гордостью объявляет: «У нас есть доступный I2C extender!» Поскольку мы получаем … Проблемы с джойстиком
PoKeys с Win7 и Win10 … Проблемы с джойстикомPoKeys в Windows 7 и Windows 10 решены Много полетов …
Драйверы шагового двигателя: пошаговое руководство
Что такое драйвер шагового двигателя?
Драйвер шагового двигателя — это схема драйвера, которая позволяет шаговому двигателю работать так, как он работает.Например, шаговые двигатели требуют достаточной и контролируемой энергии для фаз в точной последовательности. В связи с этим шаговые двигатели считаются более совершенными, чем типичные двигатели постоянного тока.
Несмотря на то, что система может показаться сверхсложной, она может быть построена с использованием нескольких транзисторов. Правильно организовав их функции включения и выключения, система может обеспечить достаточное питание фаз, а двигатель сможет выполнить этот процесс. Униполярный драйвер можно сделать в рамках приличного бюджета.Важно помнить, что этот драйвер может приводить в действие только однополярные двигатели. Если вы хотите запитать биполярный двигатель, вам понадобятся два полных моста. Это позволяет системе вернуть ток на ступеньки. Это может оказаться более сложным в изготовлении, но вы можете приобрести чипы H-bridge, чтобы упростить процесс.
Как работают драйверы шагового двигателя?
Драйверы шагового двигателя полагаются на ввод от отдельного источника для работы и создания вывода.
Следующие четыре сигнала управляют двигателем:
- ЧАСЫ: Тактовый сигнал дает команду шага.
- СБРОС: устанавливает сигналы конечного уровня в определенное начальное положение.
- НАПРАВЛЕНИЕ: Определяет направление вращения оси двигателя.
- HALF / FULL: Определяет, работать ли с полным или половинным шагом.
Дешевый способ питания простого шагового двигателя — через микроконтроллер. Этого достаточно, так как этим драйверам для работы требуется всего пара сигналов.Первый — это сигнал шага, а второй — сигнал направления. Последний при высоком логическом уровне +5 В указывает двигателю направление работы. Когда сигнал низкий (GND), он идет в противоположном направлении.
Для полного шага обычно требуется два прямоугольных сигнала в квадратуре . В зависимости от ведущей фазы ось двигателя будет вращаться либо по часовой стрелке, либо против часовой стрелки. Вращение пропорционально тактовой частоте, которая управляет импульсом на линии.Это GND и + 5V, о которых говорилось ранее. Таким образом, в зависимости от микропереключателей настройки шагового разрешения, двигатель будет переходить от одного шага к другому. Например, если он установлен в полношаговом режиме, будет выполнен полный шаг, половина полного шага, если двигатель установлен в полушаговый режим, и четверть шага для четвертного режима и так далее.
Из-за инерции вы должны увеличивать и уменьшать импульсы, чтобы синхронизироваться с магнитным полем. В противном случае мотор может заглохнуть. Рампа также должна быть гладкой и практически не иметь движения, чтобы предотвратить остановку двигателя.
Как соединить драйверы с двигателями?
Очень важно, чтобы драйвер соответствовал правильному двигателю . Если все сделать неправильно, мощность двигателя будет недостаточной, или это может привести к повреждению одной части или обоих.
При выборе подходящих двигателей и драйверов обязательно учитывайте пределы напряжения и максимальный ток, который может подавать драйвер. Обязательно учитывайте «постоянный» ток, а не «пиковый» ток, поскольку они не применимы к шаговым двигателям.Что касается двигателя, убедитесь, что он может выдерживать токи на фазу и сопротивление на фазу, которое обеспечивает драйвер. Кроме того, номинальный постоянный ток драйвера должен быть больше, чем номинальный ток двигателя.
Часто напряжение указывается, но не всегда. Вы можете использовать закон Ома , чтобы рассчитать его и убедиться, что ваш процесс дает продуктивные результаты. Умножьте это на 20, чтобы получить максимальное рабочее напряжение драйвера двигателя. Если напряжение катушки не предусмотрено, корень квадратный из индуктивности двигателя (мГн) можно умножить на 32, чтобы получить напряжение источника питания.
Это показано ниже.
Например, если в технических характеристиках двигателя указано номинальное напряжение 3 В (3 В * 20 = 60 В), можно безопасно управлять двигателем с драйвером с максимальным рабочим напряжением 60 В.
Пример 2, если в технических характеристиках двигателя указан фазный ток и сопротивление 5 А и 0,6 Ом (5 А * 0,6 Ом = 3 В * 20 = 60 В).
Пример 3, если в технических характеристиках двигателя указано, что индуктивность / фаза составляет 2,5 мГн ((√2,5) * 32 = 50.6V), вы можете безопасно использовать двигатель с управляющим драйвером 50V. Реализация значения индуктивности фаз дает консервативное номинальное напряжение, так как это очень точный расчет максимального напряжения источника питания .
Управление шаговым двигателем не должно быть сложным
Хотя процесс настройки шагового двигателя может показаться сложным, с терпением и правильным руководством процесс может быть довольно простым. Использование микроконтроллера — эффективный способ управления двигателем, поскольку для работы драйверу требуется всего несколько сигналов.Сопряжение двигателей с драйверами также может быть простым.
