Что такое драйвер L298N. Как работает L298N. Как подключить L298N к Arduino. Как управлять скоростью и направлением вращения моторов с помощью L298N. Какие преимущества у L298N по сравнению с другими драйверами моторов.
Что такое драйвер моторов L298N и для чего он нужен
Драйвер моторов L298N — это популярный модуль для управления электродвигателями постоянного тока в робототехнике и электронных проектах. Он позволяет управлять скоростью и направлением вращения сразу двух моторов, что делает его идеальным выбором для создания мобильных роботов и других подвижных устройств.
Основные особенности драйвера L298N:
- Управление двумя моторами одновременно
- Регулировка скорости с помощью ШИМ
- Изменение направления вращения
- Рабочее напряжение 5-35В
- Максимальный ток на канал — 2А
- Наличие радиатора охлаждения
- Компактные размеры
Благодаря этим характеристикам L298N стал одним из самых распространенных драйверов для работы с небольшими электромоторами в любительских проектах.
Принцип работы драйвера L298N
В основе работы драйвера L298N лежат два ключевых принципа:
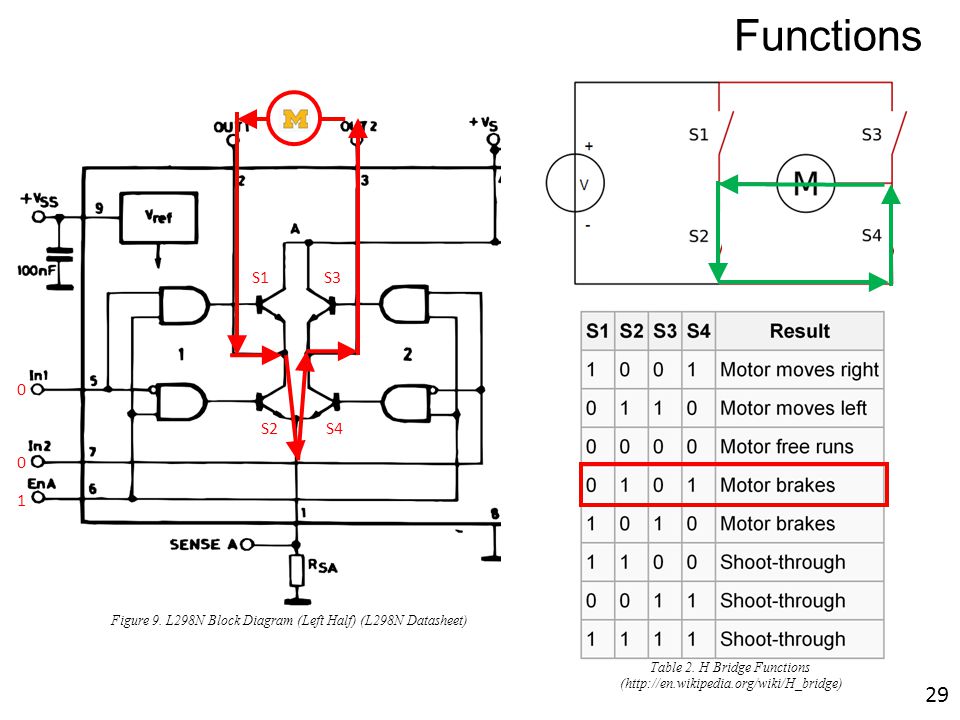
1. H-мост для управления направлением
Для изменения направления вращения мотора необходимо менять полярность подаваемого на него напряжения. Эту задачу решает схема H-моста, состоящая из 4 электронных ключей. Комбинируя их включение, можно подавать напряжение на мотор в прямом или обратном направлении:
- Ключи S1 и S4 замкнуты — мотор вращается вперед
- Ключи S2 и S3 замкнуты — мотор вращается назад
- Все ключи разомкнуты — мотор остановлен
2. ШИМ для управления скоростью
Скорость вращения регулируется с помощью широтно-импульсной модуляции (ШИМ). Суть метода в быстром включении и выключении питания мотора. Изменяя скважность импульсов, можно менять среднее значение подаваемого напряжения, а значит и скорость вращения:
- Высокая скважность — высокая скорость
- Низкая скважность — низкая скорость
- Скважность 100% — максимальная скорость
- Скважность 0% — остановка
Таким образом, комбинируя управление H-мостом и ШИМ, драйвер L298N позволяет полностью контролировать работу подключенных моторов.
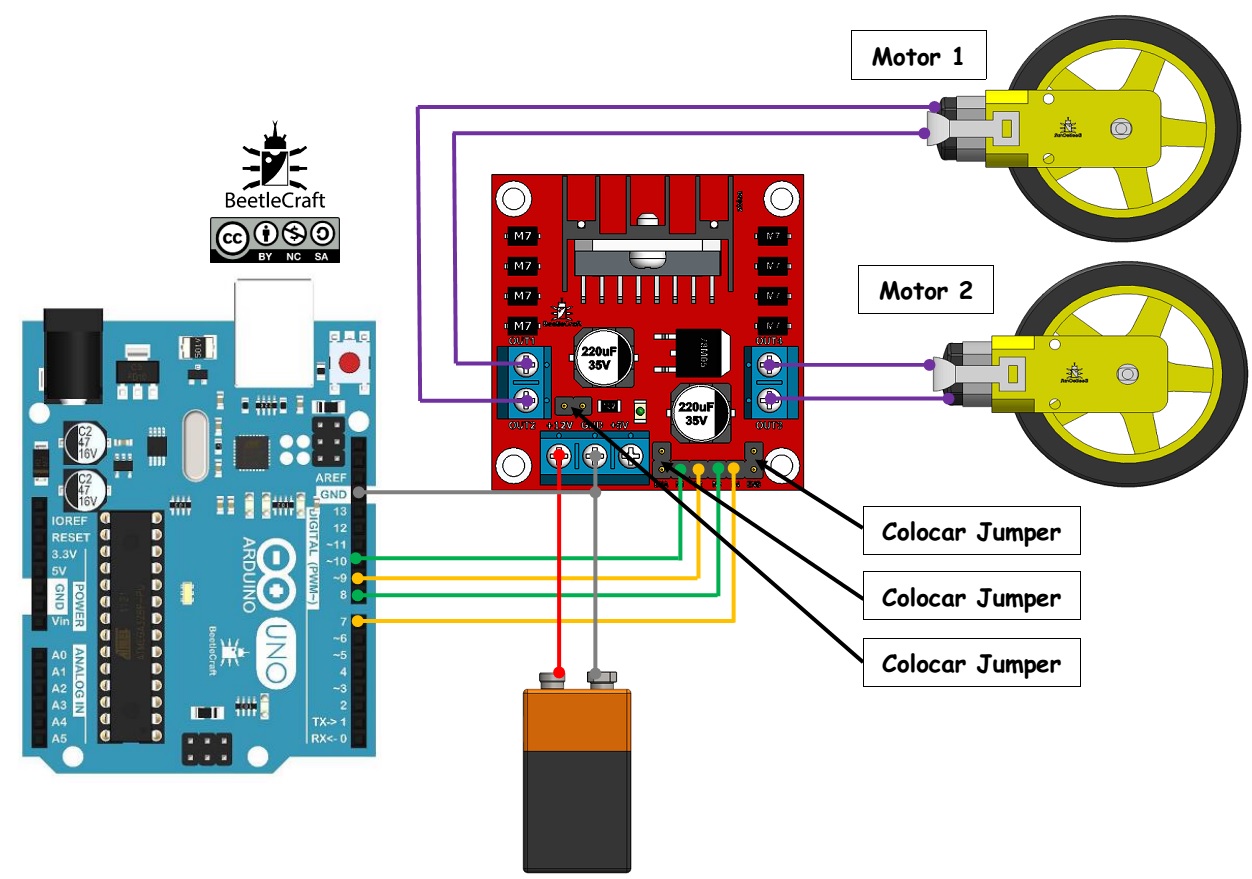
Схема подключения L298N к Arduino
Для работы с L298N потребуется:
- Плата Arduino (Uno, Mega, Nano и т.д.)
- Драйвер L298N
- 2 электромотора постоянного тока
- Источник питания 6-12В
- Соединительные провода
Схема подключения:
- VCC драйвера — к «+» источника питания
- GND драйвера — к «-» источника питания и GND Arduino
- 5V драйвера — к 5V Arduino
- IN1, IN2, IN3, IN4 драйвера — к цифровым пинам Arduino (например, 4, 5, 6, 7)
- ENA, ENB драйвера — к ШИМ-пинам Arduino (например, 9 и 10)
- OUT1, OUT2 — к выводам первого мотора
- OUT3, OUT4 — к выводам второго мотора
После подключения можно приступать к программированию Arduino для управления моторами через L298N.
Программирование Arduino для работы с L298N
Базовый скетч для управления двумя моторами через L298N может выглядеть так:
«`cpp // Пины для управления моторами const int ENA = 9; const int IN1 = 4; const int IN2 = 5; const int ENB = 10; const int IN3 = 6; const int IN4 = 7; void setup() { // Настройка пинов на выход pinMode(ENA, OUTPUT); pinMode(ENB, OUTPUT); pinMode(IN1, OUTPUT); pinMode(IN2, OUTPUT); pinMode(IN3, OUTPUT); pinMode(IN4, OUTPUT); } void loop() { // Вращение первого мотора вперед digitalWrite(IN1, HIGH); digitalWrite(IN2, LOW); analogWrite(ENA, 200); // Скорость 200 из 255 // Вращение второго мотора назад digitalWrite(IN3, LOW); digitalWrite(IN4, HIGH); analogWrite(ENB, 150); // Скорость 150 из 255 delay(2000); // Пауза 2 секунды // Остановка моторов digitalWrite(IN1, LOW); digitalWrite(IN2, LOW); digitalWrite(IN3, LOW); digitalWrite(IN4, LOW); delay(1000); // Пауза 1 секунда } «` Этот код демонстрирует базовые принципы управления моторами через L298N: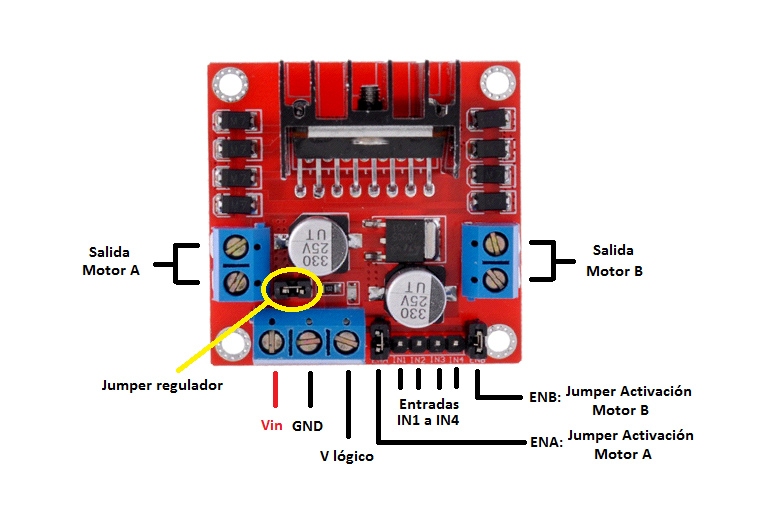
- Настройка пинов на выход в функции setup()
- Управление направлением через пины IN1-IN4
- Регулировка скорости с помощью ШИМ на пинах ENA и ENB
- Остановка моторов путем подачи LOW на все управляющие пины
Преимущества использования L298N
Драйвер L298N имеет ряд преимуществ, которые обусловили его популярность:
- Низкая стоимость по сравнению с аналогами
- Простота подключения и использования
- Возможность управления двумя моторами одновременно
- Совместимость с большинством популярных микроконтроллеров
- Наличие встроенного стабилизатора напряжения 5В
- Защита от перегрева благодаря радиатору
- Компактные размеры, позволяющие использовать в небольших проектах
Эти факторы делают L298N отличным выбором для начинающих разработчиков и любителей робототехники.
Ограничения и альтернативы L298N
Несмотря на все преимущества, у L298N есть и некоторые ограничения:
- Максимальный ток 2А на канал может быть недостаточен для мощных моторов
- Относительно высокое падение напряжения (до 2В) снижает эффективность
- Отсутствие защиты от короткого замыкания
- Нет возможности определения тока через моторы
Для более требовательных проектов можно рассмотреть альтернативные драйверы:

- TB6612FNG — меньшее падение напряжения, выше КПД
- DRV8833 — встроенная защита от перегрузки и КЗ
- VNH5019 — ток до 30А на канал, встроенный датчик тока
Выбор конкретного драйвера зависит от требований проекта и характеристик используемых моторов.
Практические применения L298N в робототехнике
Драйвер L298N широко используется в различных робототехнических проектах, таких как:
- Мобильные роботы на колесах или гусеницах
- Управляемые модели автомобилей и лодок
- Системы позиционирования солнечных панелей
- Автоматизированные системы полива растений
- Роботизированные манипуляторы
- DIY-станки с ЧПУ
В каждом из этих применений L298N обеспечивает надежное управление моторами, позволяя реализовать сложные алгоритмы движения и позиционирования.
Заключение: L298N как универсальное решение для управления моторами
Драйвер L298N представляет собой отличный баланс между функциональностью, простотой использования и стоимостью. Он позволяет легко управлять моторами в большинстве любительских и образовательных проектов, обеспечивая при этом достаточную мощность и гибкость настройки.
Ключевые моменты, которые стоит запомнить о L298N:
- Управление двумя моторами с регулировкой скорости и направления
- Простое подключение к Arduino и другим микроконтроллерам
- Широкий диапазон рабочих напряжений (5-35В)
- Максимальный ток 2А на канал
- Необходимость правильного теплоотвода при работе на максимальной мощности
Освоив работу с L298N, вы получите мощный инструмент для реализации различных робототехнических проектов и сможете легко перейти к более сложным драйверам моторов в будущем.
Подключение DC электромоторов к Raspberry Pi через драйвер L298N
Если вы захотите собрать робота на колёсах, то столкнётесь с необходимостью изучения принципов работы управляющего электромоторами драйвера. Самый простой, недорогой и распространённый драйвер — L298N . Он может управлять скоростью и направлением вращения электромоторов
Управление электромотором подразумевает под собой управление скоростью и направлением его вращения. Это достигается сочетанием двух методов:
- ШИМ (широтно-импульсная модуляция) для управления скоростью вращения
- H-Bridge — для управления направлением вращения
Скорость вращения мотора регулируется через изменение уровня подаваемого на него напряжения.
ШИМ это методика, суть которой состоит в том, что среднее значение напряжение на входе регулируется серией импульсов ВКЛ-ВЫКЛ, т. е быстрыми включениями и выключениями подачи напряжения питания к двигателю.
е быстрыми включениями и выключениями подачи напряжения питания к двигателю.
Средняя величина напряжения будет пропорциональна коэффициенту заполнения (ширине) импульса — чем больше коэффициент, тем выше напряжение, и наоборот.
Эта картинка иллюстрирует данную зависимость:
Направление вращения регулируется сменой полярности входного напряжения. Стандартным способом реализации такой смены является H-Bridge
В электрической цепи (которая визуально напоминает букву Н) H-Bridge присутствуют 4 ключа с мотором в центре этой цепи.
Полярность входного напряжения на моторе будет зависить от того, какая пара ключей замыкает цепь в настоящий момент. Вот так это выглядит:
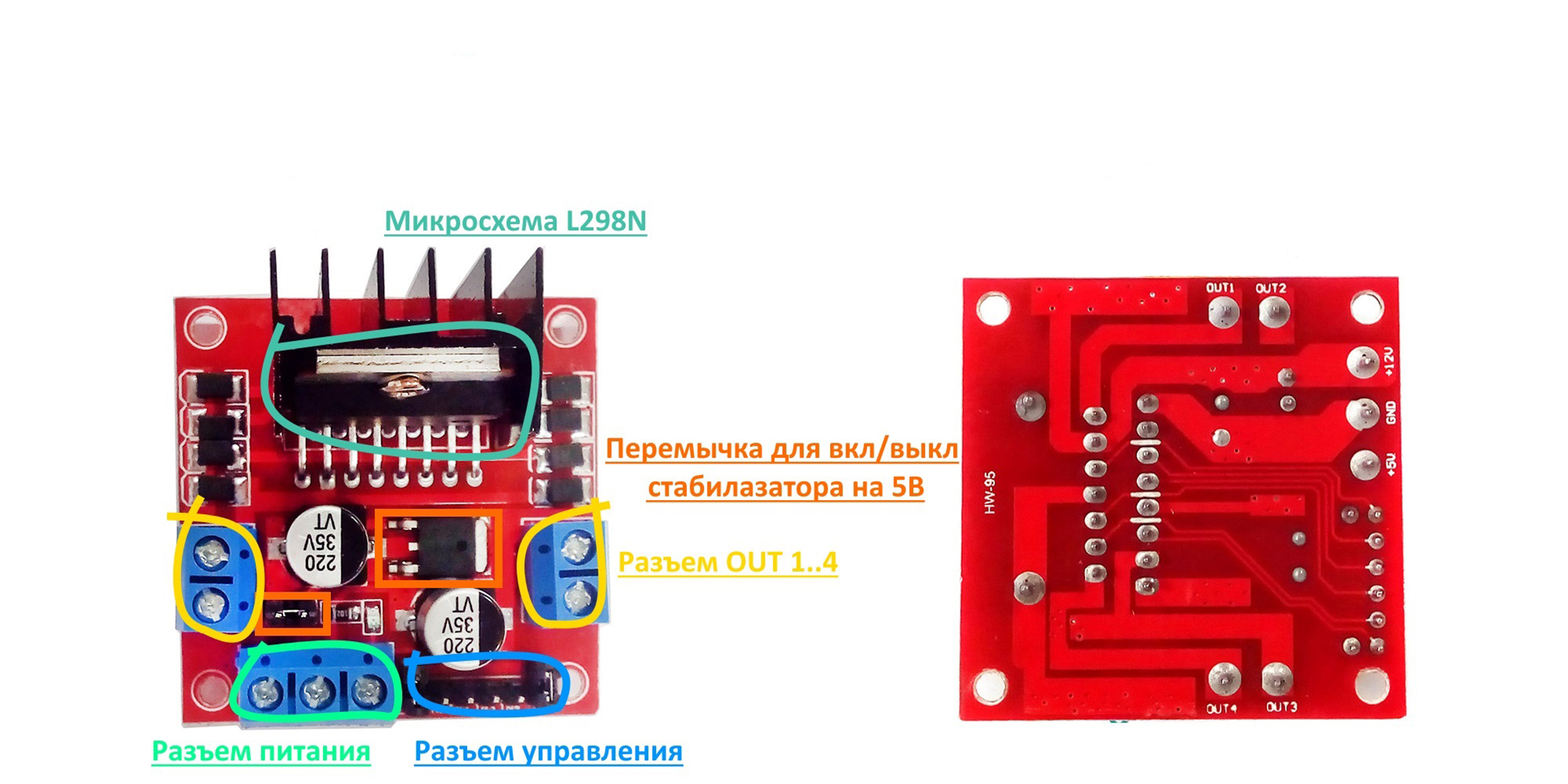
Основой этого модуля является чёрный чип с радиатором. L298N является двухканальным драйвером, и следовательно может независимо управлять двумя электромоторами. Поэтому данный драйвер хорошо подходит для использования в двухколёсных роботах, поворот которых осуществляется за счёт разницы в скорости вращения правого и левого колеса.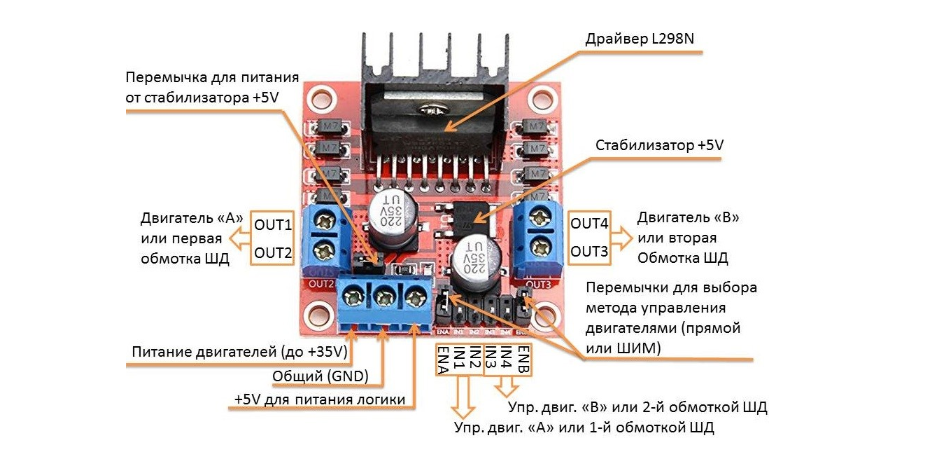
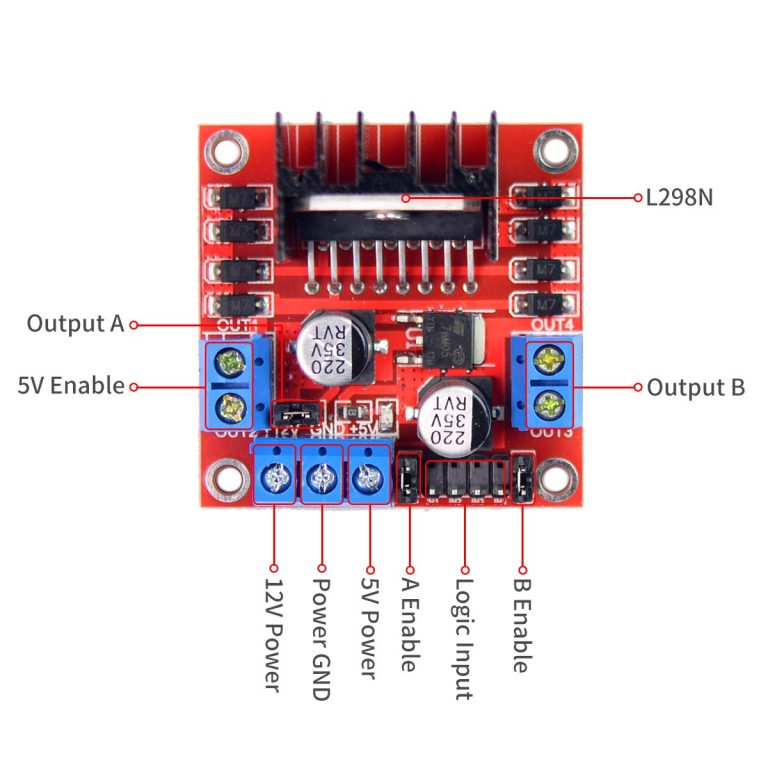
Питание к L298N подаётся через трёхконтактный (1 контакт Vs — питание, которое будет подаваться через драйвер на моторы; 2 контакт GND — земля; 3 контакт Vss — питание 5V для управляющего драйвером устройства, в качестве которого может выступать микроконтролер или Raspberry Pi) зажимной терминальный разъём (провода вставляются в разъём и зажимаются вращением винта на разъёме).
L298N имеет также встроенный стабилизатор (78M05) напряжения до 5V. Когда установлен джампер, то этот стабилизатор работает и с контакта Vss можно снимать 5V 0.5А для питания управляющего драйвером устройства. Когда джампер снят, то стабилизатор выключен, а значит нам нужно питатьуправляющее драйвером устройство от независимого источника питания.
Использование джампера запрещено, при подаче на 1-ый контакт (Vs) напряжения, превышающего 12В.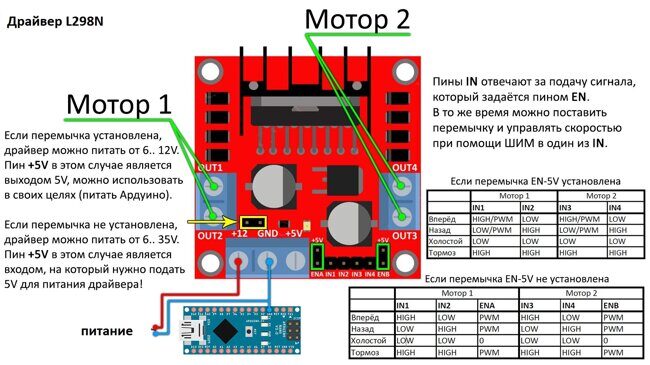 Это может привести к выходу из строя стабилизатора78M05 .
Это может привести к выходу из строя стабилизатора78M05 .
Если джампер установлен, то контакт Vss работает как выход . Подавать на него напряжение извне в этом случае запрещено
Падение напряжение на драйвере может достигать 2В, за счёт падения напряжения на транзисторах Н-Моста. Таким образом, при подаче на контакт Vs 12В до электромоторов дойдёт только 10В, а значит они не смогут выйти на максимум своих оборотов (естественно речь идёт о 12-ти вольтовых DC электромоторах). Таким образом напряжение, подаваемое на контакт Vss должно быть на 2V выше напряжения работы электромотора (14В для 12-ти вольтовых моторов, 7В для пятивольтовых соответственно)
Электромоторы подключаются к зажимным контактам по краям платы.
Можно подключать электромоторы, рассчитанные на напряжение 5-35V. Максимальный ток от драйвера к каждому мотору — 2А (если источник питания драйвера умеет отдавать столько тока)
Используя контакты IN1-IN4, можно менять направление вращения электромоторов (различные уровни напряжения на этих контактах приводят к замыканию нужных пар ключей Н-Моста драйвера L298N) — по часовой стрелке или в обратном направлении.
Контакты IN1 IN2 управляют направлением вращение первого электоромотора (А), IN3 IN4 — второго электромотора (В) Направление вращения моторов зависит от того, какой уровень напряжения (высокий или низкий) подаётся на эти контакты.
Возможно 4 варианта:
- Низкий уровень напряжения на обоих контактах — мотор выключен
- Высокий уровень напряжения на обоих контактах — мотор выключен
- In1 высокий уровень, In2 низкий уровень — мотор вращается вперёд
- Ln1 низкий уровень, In 2 высокий уровень — мотор вращается назад
Для управления скоростью вращения моторов используется контакты ENA (мотор А), ENB(мотор В)
Низкий уровень — мотор отключен, высокий уровень — мотор работает на максимальных оборотах, ШИМ — различная скорость вращения в зависимости от коэффициента заполнения импульсов. По умолчанию на этих контактах установлены джамперы, их следует снять, если вы хотите управлять оборотами.
Теперь, когда мы хорошо знакомы с драйвером L298N, можно подключить к нему питание, моторы и Raspberry Pi
Raspberry Pi я запитал через 5V внешний аккумулятор PowerBank.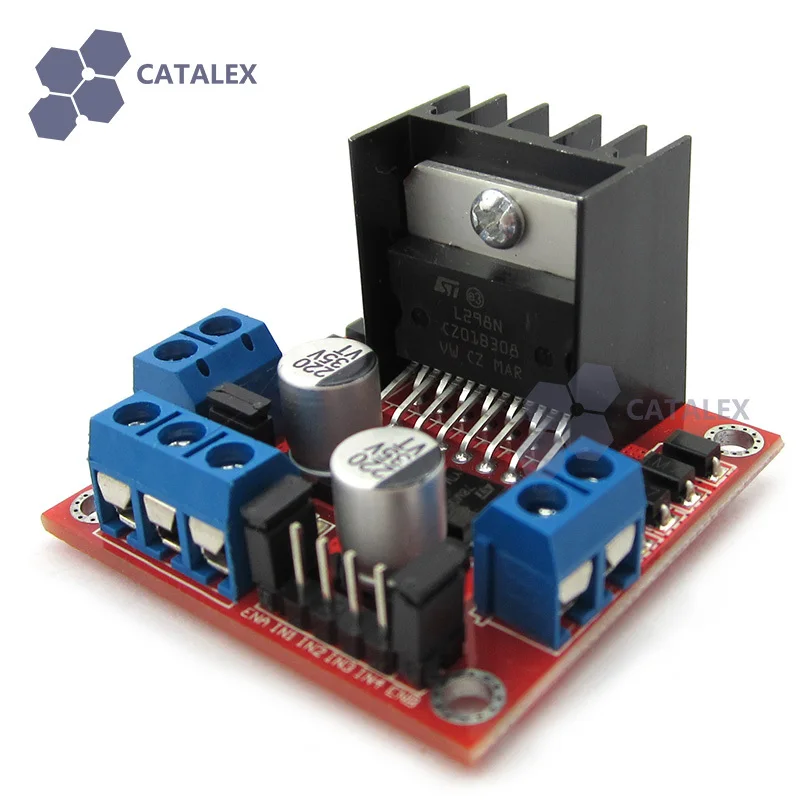 Поскольку у меня не было аккумулятора на 12V драйвер L298N я запитал от того же внешнего аккумулятора, вставив в него повышающий DC/DC преобразователь
Поскольку у меня не было аккумулятора на 12V драйвер L298N я запитал от того же внешнего аккумулятора, вставив в него повышающий DC/DC преобразователь
В следующей статье рассмотрим программирование двухколёсного робота с драйвером L298N
Драйвер двигателей L298N
Артикул: —
Добавить в избранное
Добавить в избранное
Соединительные провода
Добавить в избранное
Добавить в избранное
Мотор-редуктор или 1 колесо
Добавить в избранное
Добавить в избранное
Ультразвуковой дальномер
Добавить в избранное
Добавить в избранное
Резисторы (10 шт)
Добавить в избранное
Добавить в избранное
Батарейные блоки для 18650
Добавить в избранное
Добавить в избранное
Светодиоды 5 мм
Добавить в избранное
Добавить в избранное
Тактовая кнопка 6x6x2 мм, 6x6x5 мм, 6x6x8 мм
Добавить в избранное
Добавить в избранное
Модуль Bluetooth 3.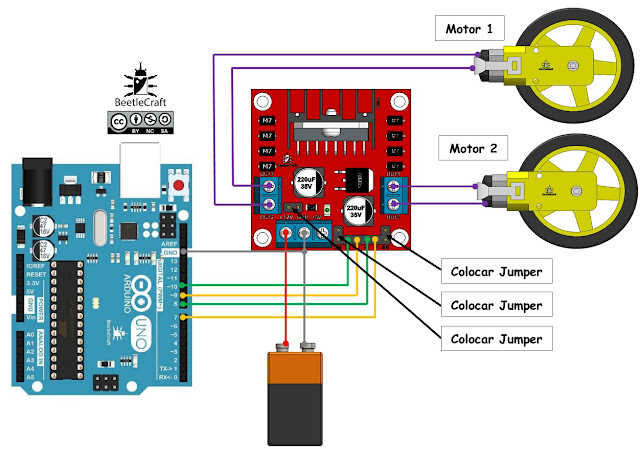 0 (Bluetooth HC-06)
0 (Bluetooth HC-06)
Добавить в избранное
Добавить в избранное
Датчик сенсор линии
Добавить в избранное
Добавить в избранное
Breadboard Medium
Добавить в избранное
Добавить в избранное
Сервомотор SG90
Добавить в избранное
L298N позволяет управлять двумя моторами постоянного тока либо шаговым двигателем с потребляемым током до 2 Ампер.
Микросхема: L298N
Питания модуля: 5В
Питания двигателей: 5-35В
Нагрузка: 2A
Рабочая температура:-25C ~ +130 C
Добавить в избранное
ШИМ регулятор DC моторов 3А
Добавить в избранное
Добавить в избранное
Генератор высокого напряжения 400 тыс вольт
Артикул: L6
Добавить в избранное
Добавить в избранное
Шаговый мотор с драйвером / 28BYJ-48
Добавить в избранное
Добавить в избранное
DIY набор «Часы с будильником»
Артикул: C11
Добавить в избранное
Добавить в избранное
DIY светодиодная панель управляемая голосом
Добавить в избранное
Добавить в избранное
ШИМ регулятор DC моторов 2А
Артикул: h21
Добавить в избранное
Добавить в избранное
Клавиатура встраиваемая
Добавить в избранное
Добавить в избранное
Инфракрасный датчик препятствий E18-D80NK
Добавить в избранное
Добавить в избранное
Температурный и влажности дисплей встраиваемый
Добавить в избранное
Добавить в избранное
Термистор B3950 100K для 3D принтера
Добавить в избранное
Добавить в избранное
DIY набор «Металлоиска́тель (металлодетектор)»
Добавить в избранное
Добавить в избранное
Кабель питания Molex 4Pin 1х3
Добавить в избранное
Избранное0Избранное
0Корзина0 c
Знакомство с драйвером двигателя L298N
admin 0 комментариев , Драйвер двигателя, Конфигурация выводов, Схема выводов, Распиновка, Технические характеристики
Привет друзья! С возвращением в ЭлектроДуино. Этот блог основан на Введении в драйвер двигателя L298N | Как это работает. Здесь мы обсудим Введение в L29Модуль драйвера двигателя 8N, обзор аппаратного обеспечения модуля, схема выводов, принцип работы, функции и приложения.
Введение
Модуль L298N представляет собой высоковольтный и сильноточный двойной мостовой модуль драйвера двигателя для управления двигателем постоянного тока и шаговым двигателем. Он может контролировать как скорость, так и направление вращения двух двигателей постоянного тока. Этот модуль состоит из двухканальной ИС драйвера двигателя H-Bridge L298. В этом модуле используются два метода управления скоростью и направлением вращения двигателей постоянного тока. Это PWM — для управления скоростью и H-Bridge — для управления направлением вращения. Эти модули могут одновременно управлять двумя двигателями постоянного тока или одним шаговым двигателем.
Эти модули могут одновременно управлять двумя двигателями постоянного тока или одним шаговым двигателем.
Обзор аппаратного обеспечения драйвера двигателя L298N
Этот модуль драйвера двигателя состоит из двух основных компонентов: микросхемы драйвера двигателя L298 и регулятора 78M05 5 В.
L298N Модуль драйвера двигателя Обзор оборудованияИС драйвера двигателя L298
L298 представляет собой высоковольтную, сильноточную двойную полномостовую ИС драйвера двигателя. Он принимает стандартные логические уровни TTL (логика управления) и управляет индуктивными нагрузками, такими как реле, соленоиды, двигатели постоянного тока и шаговые двигатели. Это 15-контактная микросхема. Согласно L298, его рабочее напряжение составляет от +5 до +46 В, а максимальный ток, проходящий через каждый выход, составляет 3 А. Эта ИС имеет два входа включения, они предназначены для включения или отключения устройства независимо от входных сигналов.
Радиатор черного цвета прикреплен к микросхеме L298 модуля. Радиатор — это пассивный теплообменник, который передает тепло, выделяемое электронным или механическим устройством, текучей среде, часто воздуху или жидкому хладагенту.
78M05 Регулятор 5 В
Модуль имеет встроенный регулятор напряжения 78M05 5V. Этот регулятор напряжения будет выполняться только в том случае, если установлена перемычка 5V Enable. Когда источник питания меньше или равен 12 В, внутренняя схема будет питаться от регулятора напряжения, а контакт 5 В можно использовать в качестве выходного контакта для питания микроконтроллера или другой схемы (датчика).
Перемычку не следует устанавливать, когда напряжение питания превышает 12 В, и необходимо подавать отдельное напряжение 5 В через клемму 5 В для питания внутренней схемы.
L298N Диаграмма модуля модуля двигателя L298N Диаграмма модуля двигателя.
Контакты источника питания
 Его входное напряжение составляет от 5 до 35 В.
Его входное напряжение составляет от 5 до 35 В. Контакты управления
Штифты управления скоростью
| Вывод ENA используется для управления скоростью двигателя A . Если на этом контакте есть перемычка, то контакт, подключенный к +5 В, и двигатель будет включен, то двигатель А будет вращаться с максимальной скоростью. если убрать перемычку, то нужно подключить этот пин к ШИМ-входу микроконтроллера. | ||
| 2 | ENB | Вывод ENB используется для управления скоростью Motor B . Если на этом контакте есть перемычка, то контакт, подключенный к +5 В, и двигатель будет включен, то двигатель B будет вращаться с максимальной скоростью. если убрать перемычку, то нужно подключить этот пин к ШИМ-входу микроконтроллера. Таким образом, мы можем контролировать скорость двигателя B. Если мы подключим этот контакт к земле, двигатель B будет отключен. |
| Выходные контакты | ||
| 1 | OUT1 и OUT2 | Этот клеммный блок обеспечивает выход для двигателя A . |
| 2 | OUT3 и OUT4 | Эта клеммная колодка обеспечивает выход для Двигатель B .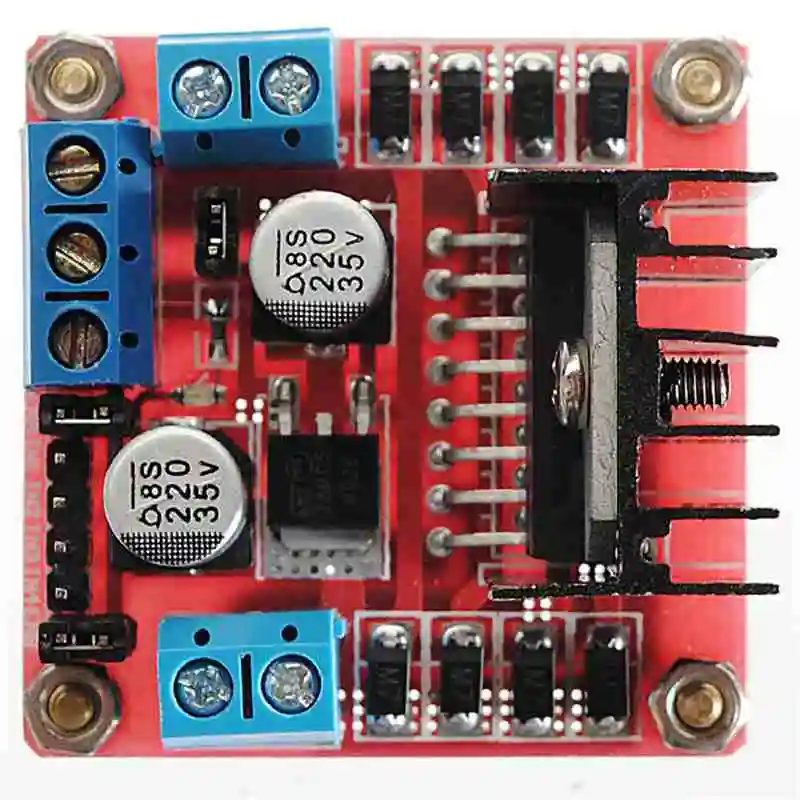 |
 Таким образом, мы можем контролировать скорость двигателя А. Если мы подключим этот контакт к земле, двигатель А будет отключен.
Таким образом, мы можем контролировать скорость двигателя А. Если мы подключим этот контакт к земле, двигатель А будет отключен.
Как работает модуль управления двигателем
Этот модуль использует два метода управления скоростью и направлением вращения двигателей постоянного тока. Это H-Bridge — для управления направлением вращения и PWM — для управления скоростью.
H-Bridge Techniques
Модуль привода двигателя L298n использует технологию H-Bridge для управления направлением вращения двигателя постоянного тока. В этом методе H-мост управлял направлением вращения двигателя постоянного тока, изменяя полярность его входного напряжения.
Схема H-моста содержит четыре переключающих элемента, таких как транзисторы (BJT или MOSFET), с двигателем в центре, образующим H-подобную конфигурацию. Вход IN1, IN2, IN3 и IN4 контактов фактически управляют переключает схемы Н-моста внутри микросхемы L298N.
Мы можем изменить направление тока, одновременно активировав два определенных переключателя, таким образом, мы можем изменить направление вращения двигателя.
Случай 1
Когда все переключатели S1, S2, S3 и S4 разомкнуты, ток на клеммы двигателя не поступает. Итак, в этом состоянии двигатель остановлен (не работает).
Случай 2
Когда переключатели S1 и S4 замкнуты, на левую клемму двигателя подается положительное (+) напряжение, а на правую клемму двигателя подается отрицательное (-) напряжение. Итак, в этом состоянии двигатель начинает вращаться в определенном направлении (по часовой стрелке).
Случай 3
Когда переключатели S2 и S3 замкнуты, правая клемма двигателя получает положительное (+) напряжение, а левая клемма двигателя получает отрицательное (-) напряжение. Итак, в этом состоянии двигатель начинает вращаться в определенном направлении (против часовой стрелки).
Модуль драйвера двигателя L298N Работа H-моста Корпус 3Методы ШИМ (широтно-импульсной модуляции)
Модуль драйвера двигателя L298n использует метод ШИМ для управления скоростью вращения двигателя постоянного тока. В этом методе скорость двигателя постоянного тока можно контролировать, изменяя его входное напряжение.
В этом методе скорость двигателя постоянного тока можно контролировать, изменяя его входное напряжение.
Широтно-импульсная модуляция — это метод, при котором среднее значение входного напряжения регулируется путем отправки серии импульсов включения-выключения. Среднее напряжение пропорционально ширине импульсов, эти импульсы известны как рабочий цикл.
Если рабочий цикл выше, то среднее напряжение подается на двигатель постоянного тока (высокая скорость), а чем ниже рабочий цикл, тем меньше среднее напряжение подается на двигатель постоянного тока (низкая скорость).
L298N Motor Driver Module Pulse Width Modulation (PWM) techniqueModule Specifications & Features
| Parameter | Value |
| Operating Voltage | 5V – 46V |
| Operating Current | 2A |
| Logic Voltage | 5V |
| Logical Current | 0-36mA |
| Maximum Power (W) | 25W |
| Микросхема драйвера | L298 двухканальный драйвер двигателя H-Bridge IC |
| Светодиодные индикаторы | Светодиодный индикатор включения питания |
| Приводы двигателя | Приводы до 4 выходных двигателей (2 для каждой клеммной колодки двигателя) или один шаговый двигатель |
| Размеры модуля | 44 x 44 x 28 (ДxШxВ) мм |
Применение
- Управление двигателями постоянного тока
- Управление шаговыми двигателями
- В робототехнике
Драйвер двигателя L298N Dual H-Bridge
Дом » Драйвер двигателя L298N Dual H-Bridge
Описание Статьи Спецификация Отзывы (1)
Драйвер двигателя L298N Dual H-Bridge представляет собой недорогую плату драйвера двигателя, которую можно использовать для управления двумя двигателями робота.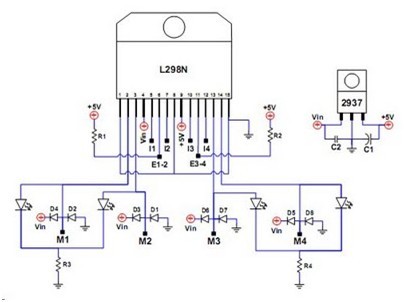
Похожие записи
