Что такое двигатель постоянного тока с последовательным возбуждением. Как устроен и работает двигатель с последовательной обмоткой. Каковы основные характеристики и особенности ДПТ последовательного возбуждения. Где применяются такие двигатели. Преимущества и недостатки по сравнению с другими типами ДПТ.
Устройство и принцип работы двигателя постоянного тока с последовательным возбуждением
Двигатель постоянного тока с последовательным возбуждением представляет собой электрическую машину, в которой обмотка возбуждения включена последовательно с обмоткой якоря. Основные элементы конструкции:
- Статор с обмоткой возбуждения
- Ротор (якорь) с обмоткой якоря
- Коллектор и щетки
- Подшипниковые щиты
- Вал
Принцип работы двигателя основан на взаимодействии магнитных полей статора и ротора:
- При подаче напряжения ток проходит через обмотку возбуждения и обмотку якоря последовательно.
- Обмотка возбуждения создает магнитное поле статора.
- В обмотке якоря возникает ток, создающий магнитное поле ротора.
- Взаимодействие полей статора и ротора создает вращающий момент.
- Якорь начинает вращаться, вращая вал двигателя.
Особенности характеристик двигателя с последовательным возбуждением
Двигатели постоянного тока с последовательным возбуждением обладают рядом уникальных характеристик:
- Высокий пусковой момент, в 4-5 раз превышающий номинальный
- Большая перегрузочная способность по моменту
- Мягкая механическая характеристика
- Сильная зависимость частоты вращения от нагрузки
- Возможность работы при больших перегрузках
Механическая характеристика двигателя имеет гиперболический вид. При увеличении нагрузки частота вращения значительно снижается.
Преимущества и недостатки двигателей последовательного возбуждения
Основные преимущества ДПТ с последовательным возбуждением:
- Высокий пусковой и максимальный момент
- Большая перегрузочная способность
- Возможность работы при пониженном напряжении
- Простота конструкции
- Высокая надежность
Недостатки данного типа двигателей:
- Сложность регулирования частоты вращения
- Опасность разноса при малых нагрузках
- Невозможность рекуперативного торможения
- Значительные пульсации момента при работе от выпрямителя
Области применения двигателей постоянного тока последовательного возбуждения
Благодаря своим особенностям, двигатели с последовательным возбуждением нашли широкое применение в различных отраслях:

- Электротранспорт (электровозы, трамваи, троллейбусы)
- Подъемно-транспортные механизмы (краны, лебедки, лифты)
- Прокатные станы
- Электроинструмент
- Стартеры автомобилей
- Бытовая техника (пылесосы, миксеры)
В этих применениях требуется высокий пусковой момент и допустима нестабильная частота вращения.
Способы регулирования частоты вращения
Для двигателей последовательного возбуждения применяются следующие методы регулирования скорости:
- Изменение напряжения питания
- Шунтирование обмотки якоря
- Шунтирование обмотки возбуждения
- Секционирование обмотки возбуждения
- Введение добавочного сопротивления в цепь якоря
Наиболее эффективным является регулирование изменением напряжения с помощью управляемого выпрямителя или импульсного преобразователя.
Тормозные режимы работы
Для двигателей с последовательным возбуждением возможны следующие тормозные режимы:
- Динамическое торможение
- Торможение противовключением
Рекуперативное торможение невозможно из-за особенностей характеристик. При динамическом торможении обмотка возбуждения отключается от якоря и подключается к отдельному источнику.

Сравнение с другими типами двигателей постоянного тока
По сравнению с двигателями параллельного и независимого возбуждения, ДПТ последовательного возбуждения имеют:
- Более высокий пусковой момент
- Большую перегрузочную способность
- Худшую регулировочную характеристику
- Меньшую стабильность частоты вращения
Это определяет области их рационального применения в приводах с тяжелыми условиями пуска и частыми перегрузками.
Универсальные коллекторные двигатели
Особой разновидностью двигателей с последовательным возбуждением являются универсальные коллекторные двигатели. Их особенности:
- Возможность работы как от постоянного, так и от переменного тока
- Высокая частота вращения (до 20000 об/мин)
- Малые габариты и масса
- Простота регулирования скорости
Универсальные двигатели широко применяются в бытовой технике, электроинструменте, на транспорте.
Заключение

ДПТ последовательного возбуждения | Электрикам
В этом двигателе обмотка возбуждения включена последовательно в цепь якоря (рис. 29.9, а), поэтому магнитный поток Ф в нем зависит от тока нагрузки I = Ia = Iв. При небольших нагрузках магнитная система машины не насыщена и зависимость магнитного потока от тока нагрузки прямо пропорциональна, т. е. Ф = k ф Ia (kф — коэффициент пропорциональности). В этом случае найдем электромагнитный момент:
Формула частоты вращения примет вид
. (29.15)
На рис. 29.9, б представлены рабочие характеристики M = F(I) и n= (I) двигателя последовательного возбуждения. При больших нагрузках наступает насыщение магнитной системы двигателя. В этом случае магнитный поток при возрастании нагрузки практически не изменяется и характеристики двигателя приобретают почти прямолинейный характер. Характеристика частоты вращения двигателя последовательного возбуждения показывает, что частота вращения двигателя значительно меняется при изменениях нагрузки. Такую характеристику принято называть мягкой.
В этом случае магнитный поток при возрастании нагрузки практически не изменяется и характеристики двигателя приобретают почти прямолинейный характер. Характеристика частоты вращения двигателя последовательного возбуждения показывает, что частота вращения двигателя значительно меняется при изменениях нагрузки. Такую характеристику принято называть мягкой.
Рис. 29.9. Двигатель последовательного возбуждения:
а — принципиальная схема; б — рабочие характеристики; в — механические характеристики; 1 — естественная характеристика; 2 — искусственная характеристика
При уменьшении нагрузки двигателя последовательного возбуждения частота вращения резко увеличивается и при нагрузке меньше 25% от номинальной может достигнуть опасных для двигателя значений («разнос»). Поэтому работа двигателя последовательного возбуждения или его пуск при нагрузке на валу меньше 25% от номинальной недопустима.
Для более надежной работы вал двигателя последовательного возбуждения должен быть жестко соединен с рабочим механизмом посредством муфты и зубчатой передачи.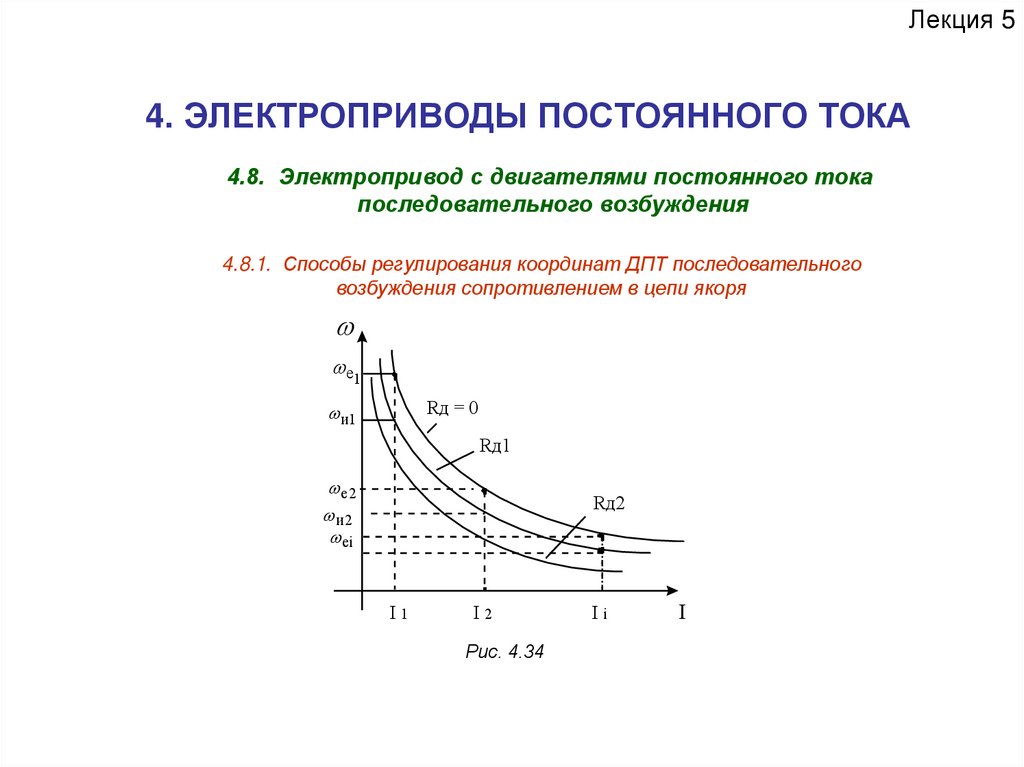 Применение ременной передачи недопустимо, так как при обрыве или сбросе ремня может произойти «разнос» двигателя. Учитывая возможность работы двигателя на повышенных частотах вращения, двигатели последовательного возбуждения, согласно ГОСТу, подвергают испытанию в течение 2 мин на превышение частоты вращения на 20% сверх максимальной, указанной на заводском щите, но не меньше чем на 50% сверх номинальной.
Применение ременной передачи недопустимо, так как при обрыве или сбросе ремня может произойти «разнос» двигателя. Учитывая возможность работы двигателя на повышенных частотах вращения, двигатели последовательного возбуждения, согласно ГОСТу, подвергают испытанию в течение 2 мин на превышение частоты вращения на 20% сверх максимальной, указанной на заводском щите, но не меньше чем на 50% сверх номинальной.
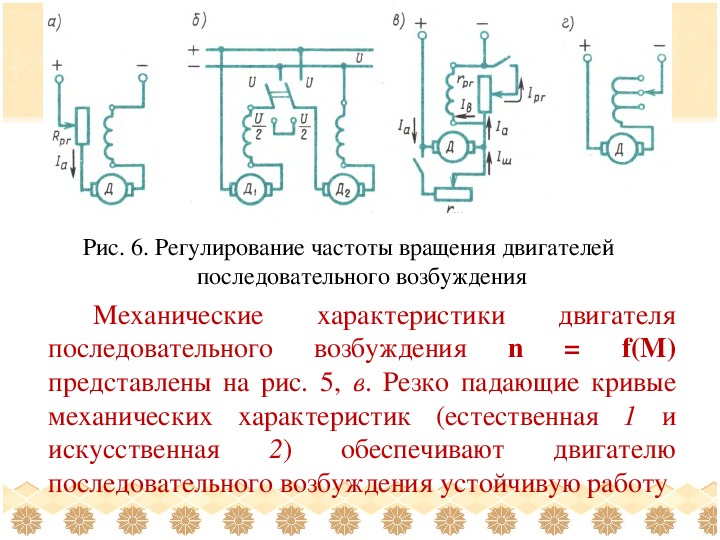
Механические характеристики двигателя последовательного возбуждения n=f(M) представлены на рис. 29.9, в. Резко падающие кривые механических характеристик (естественная 1 и искусственная 2) обеспечивают двигателю последовательного возбуждения устойчивую работу при любой механической нагрузке. Свойство этих двигателей развивать большой вращающий момент, пропорциональный квадрату тока нагрузки, имеет важное значение, особенно в тяжелых условиях пуска и при перегрузках, так как с постепенным увеличением нагрузки двигателя мощность на его входе растет медленнее, чем вращающий момент.
Номинальное изменение частоты вращения двигателя последовательного возбуждения
, (29.16)
где n[0,25] — частота вращения при нагрузке двигателя, составляющей 25% от номинальной.
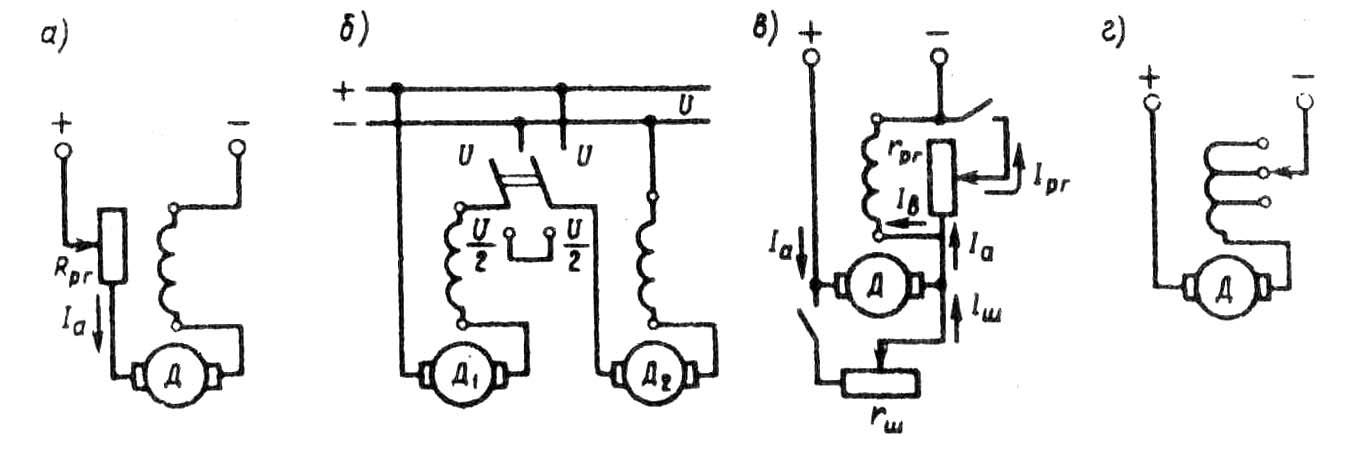
Частоту вращения двигателей последовательного возбуждения можно регулировать изменением либо напряжения U, либо магнитного потока обмотки возбуждения. В первом случае в цепь якоря последовательно включают регулировочный реостат Rрг (рис. 29.10, а). С увеличением сопротивления этого реостата уменьшаются напряжение на входе двигателя и частота его вращения.
При совместной работе нескольких однотипных двигателей частоту вращения регулируют изменением схемы их включения относительно друг друга (рис. 29.10, б). Так, при параллельном включении двигателей каждый из них оказывается под полным напряжением сети, а при последовательном включении двух двигателей на каждый двигатель приходится половина напряжения сети. При одновременной работе большего числа двигателей возможно большее количество вариантов включения. Этот способ регулирования частоты вращения применяют в электровозах, где установлено несколько одинаковых тяговых двигателей.
Изменение подводимого к двигателю напряжения возможно при питании двигателя от источника постоянного тока с регулируемым напряжением (например, по схеме, аналогичной рис. 29.6, а). При уменьшении подводимого к двигателю напряжения его механические характеристики смещаются вниз, практически не меняя своей кривизны (рис. 29.11).
29.6, а). При уменьшении подводимого к двигателю напряжения его механические характеристики смещаются вниз, практически не меняя своей кривизны (рис. 29.11).
Рис. 29.11. Механические характеристики двигателя последовательного возбуждения при изменении подводимого напряжения
Регулировать частоту вращения двигателя изменением магнитного потока можно тремя способами: шунтированием обмотки возбуждения реостатом rрг, секционированием обмотки возбуждения и шунтированием обмотки якоря реостатом rш. Включение реостата rрг, шунтирующего обмотку возбуждения (рис. 29.10, в), а также уменьшение сопротивления этого реостата ведет к снижению тока возбуждения Iв = Ia — Iрг, а следовательно, к росту частоты вращения. Этот способ экономичнее предыдущего (см. рис. 29.10, а), применяется чаще и оценивается коэффициентом регулирования
.
Обычно сопротивление реостата rрг принимается таким, чтобы kрг >= 50%.
При секционировании обмотки возбуждения (рис. 29.10, г) отключение части витков обмотки сопровождается ростом частоты вращения. При шунтировании обмотки якоря реостатом rш (см. рис. 29.10, в) увеличивается ток возбуждения Iв = Ia+Iрг, что вызывает уменьшение частоты вращения. Этот способ регулирования, хотя и обеспечивает глубокую регулировку, неэкономичен и применяется очень редко.
Рис. 29.10. Регулирование частоты вращения двигателей последовательного возбуждения.
27.12.2014
Электрические машины,Машины постоянного тока,Двигатель постоянного тока,ДПТ
Электрические машины постоянного тока
Двигатели последовательного возбуждения | Электротехника
Схема двигателя. Схема двигателя последовательного возбуждения изображена на рис. 1.31. Ток, потребляемый двигателем из сети, протекает по якорю и обмотке возбуждения, соединенной с якорем последовательно. Поэтому I = Iя = Iв.
Схема двигателя последовательного возбуждения изображена на рис. 1.31. Ток, потребляемый двигателем из сети, протекает по якорю и обмотке возбуждения, соединенной с якорем последовательно. Поэтому I = Iя = Iв.
Также последовательно с якорем включен пусковой реостат Rп, который, как и у двигателя параллельного возбуждения, после выпуска выводится.
Уравнение механической характеристики. Уравнение механической характеристики может быть получено из формулы (1.6). При токах нагрузки, меньших (0,8 – 0,9) Iном, можно считать, что магнитная цепь двигателя не насыщена и магнитный поток Ф пропорционален току I : Ф = kI, где k = const. (При больших токах коэффициент k несколько уменьшается). Заменяя в (1.2) Ф, получаем М = См kI откуда
Iя =
Ф =. (1.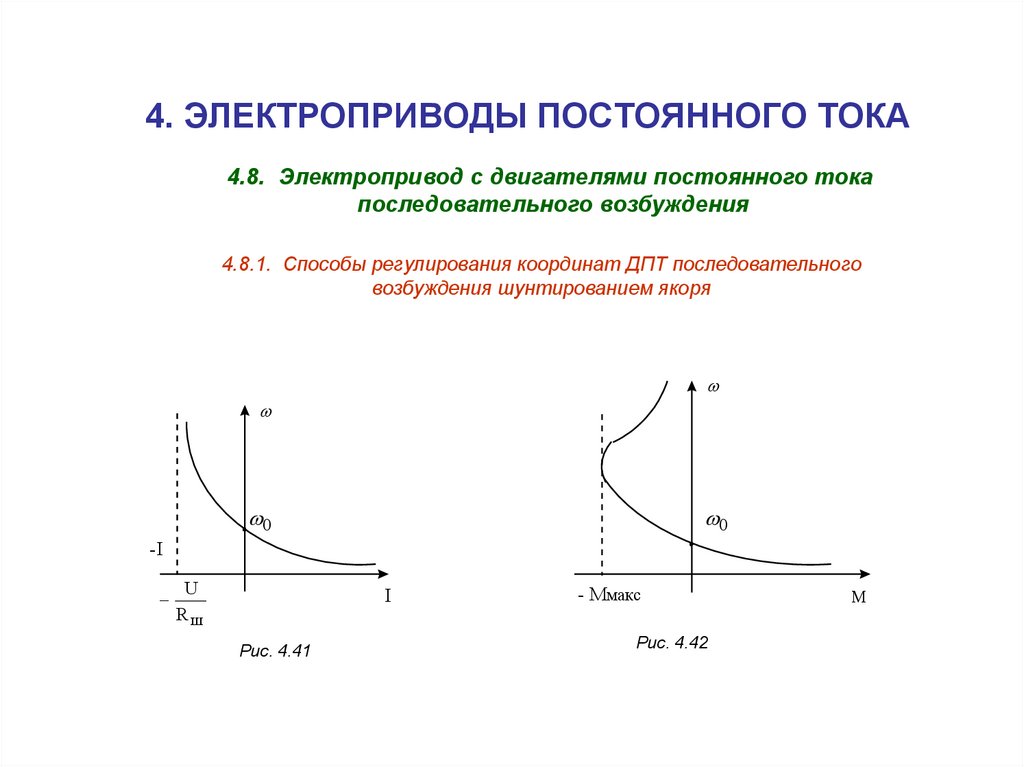 10)
10)
Подставим Ф в (1.6):
n = (1.11)
График, соответствующий (1.11), представлен на рис. 1.32 (кривая 1). При изменении момента нагрузки частота вращения двигателя резко изменяется – характеристики подобного типа называются «мягкими». При холостом ходе, когда М » 0, частота вращения двигателя безгранично возрастает и двигатель «идет вразнос».
Ток, потребляемый двигателем последовательного возбуждения, при увеличении нагрузки растет в меньшей степени, чем у двигателя параллельного возбуждения. Это объясняется тем, что одновременно с ростом тока растет поток возбуждения и вращающий момент становится равным моменту нагрузки при меньшем токе. Эта особенность двигателя последовательного возбуждения используется там, где есть значительные механические перегрузки двигателя: на электрифицированном транспорте, в подъемно-транспортных механизмах и других устройствах.
Регулирование частоты вращения. Регулирование частоты вращения двигателей постоянного тока, как указывалось выше, возможно тремя способами.
Регулирование частоты вращения двигателей постоянного тока, как указывалось выше, возможно тремя способами.
Изменение возбуждения можно осуществить включением реостата Rр1 параллельно обмотке возбуждения (см. рис. 1.31) или включением реостата Rр2 параллельно якорю. При включении реостата Rр1 параллельно обмотке возбуждения магнитный поток Ф можно уменьшать от номинального до минимального Фmin. Частота вращения двигателя при этом будет увеличиваться (в формуле (1.11) уменьшается коэффициент k). Механические характеристики, соответствующие этому случаю, показаны на рис. 1.32, кривые 2, 3. При включении реостата параллельно якорю ток в обмотке возбуждения, магнитный поток и коэффициент k увеличиваются, а частота вращения двигателя уменьшается. Механические характеристики для этого случая изображены на рис. 1.32, кривые 4, 5. Однако регулирование вращения реостатом, включенном параллельно якорю, применяется редко, так как потери мощности в реостате и КПД двигателя уменьшается.
Изменение частоты вращения путем изменения сопротивления цепи якоря возможно при включении реостата Rр3 последовательно в цепь якоря (рис. 1.31). Реостат Rр3 увеличивает сопротивление цепи якоря, что ведет к уменьшению частоты вращения относительно естественной характеристики. (В (1.11) вместо Rя надо подставить Rя + Rр3.) Механические характеристики при этом способе регулирования представлены на рис. 1.32, кривые 6, 7. Подобное регулирование используется сравнительно редко из-за больших потерь в регулировочном реостате.
Наконец, регулирование частоты вращения изменением напряжения сети, как и в двигателях параллельного возбуждения, возможно только в сторону уменьшения частоты вращения при питании двигателя от отдельного генератора или управляемого выпрямителя. Механическая характеристика при этом способе регулирования изображена на рис. 1.32, кривая 8. При наличии двух двигателей, работающих на общую нагрузку, они с параллельного соединения могут переключаться на последовательное, напряжение U на каждом двигателе при этом уменьшается вдвое, соответственно уменьшается и частота вращения.
Тормозные режимы двигателя последовательного возбуждения. Режим генераторного торможения с отдачей энергии в сеть в двигателе последовательного возбуждения невозможен, так как получить частоту вращения n>nxне представляется возможным (nх = ).
Режим торможения противовключением можно получить, так же как в двигателе параллельного возбуждения, путем переключения выводов обмотки якоря или обмотки возбуждения.
Что такое двигатели с возбуждением и где они применяются?
Вы здесь: Домашняя страница / Часто задаваемые вопросы + основы / Что такое двигатели с обмоткой возбуждения и где они применяются?
By Danielle Collins Оставить комментарий
Щеточные двигатели постоянного тока обычно доступны в двух типах, в зависимости от конструкции статора: с постоянным магнитом или с обмоткой. Оба типа двигателей используют ток и обмотки для создания магнитного поля в роторе, но они различаются тем, как создается магнитное поле статора: с помощью постоянных магнитов внутри статора или с помощью электромагнитных обмоток.
Двигатели с обмоткой возбуждения далее классифицируются по тому, как соединены обмотки якоря (ротор) и обмотка возбуждения (статор): последовательная обмотка, шунтирующая обмотка или составная обмотка. Несмотря на то, что рабочие характеристики трех двигателей с возбужденным полем различаются, эти двигатели, как правило, имеют более высокие крутящий момент и скорость, чем двигатели с постоянными магнитами.
Двигатели постоянного тока с последовательным возбуждением
Когда обмотки якоря и обмотки возбуждения соединены последовательно, двигатель называется двигателем постоянного тока с последовательным возбуждением. Последовательное соединение означает, что ток через обмотку якоря и обмотки возбуждения равен (I всего = I a = I f ), что позволяет двигателю потреблять значительный ток. А для двигателей с последовательным возбуждением крутящий момент пропорционален квадрату тока, поэтому эти двигатели способны создавать очень высокий крутящий момент, особенно при запуске. Двигатели постоянного тока с обмоткой серии
Изображение предоставлено: National Instruments
С другой стороны, двигатели с последовательной обмоткой не подходят для управления скоростью. И вот почему: по мере того, как двигатель нагружается, его скорость уменьшается, что приводит к уменьшению противо-ЭДС и увеличению сетевого напряжения. Это повышенное напряжение приводит к увеличению тока якоря и тока возбуждения. Но ток в конечном итоге становится достаточно большим, чтобы вызвать насыщение магнитного поля, и поток между якорем и статором будет увеличиваться медленнее, чем скорость увеличения тока. Таким образом, двигатель не может создать достаточный крутящий момент, чтобы вернуть скорость к предварительно нагруженному значению.
Уравнение напряжения для DC Motor:
E NET = E — E B
E NET = NET TRASE
E NET = NET TRASE
E . b = напряжение противо-ЭДС
Благодаря этим характеристикам — высокому пусковому моменту, но плохой регулировке скорости — двигатели постоянного тока с последовательной обмоткой часто используются в качестве стартеров для крупного оборудования с высокими инерционными нагрузками, такого как краны и лифты. Они также встречаются в потребительских товарах, требующих лишь грубой регулировки скорости, таких как блендеры и ручные инструменты.
Универсальный двигатель представляет собой специальную конструкцию двигателя с последовательным возбуждением, который может работать как от постоянного, так и от переменного тока.
Двигатели постоянного тока с параллельным возбуждением
Если обмотки якоря и обмотки возбуждения соединены параллельно, двигатель называется двигателем постоянного тока с параллельным возбуждением. (На электрическом языке параллельная цепь называется шунтом.) Параллельное соединение между обмотками означает, что ток, подаваемый на двигатель, делится между якорем и возбуждением (I всего = I a + I f ). Шунтирующие (возбуждающие) обмотки имеют высокое сопротивление, что препятствует протеканию большого тока при запуске. Но в отличие от серийных двигателей, параллельные двигатели обеспечивают очень хорошую регулировку скорости. Двигатели постоянного тока с параллельным возбуждением
Изображение предоставлено: National Instruments
Первоначальный эффект увеличения нагрузки на шунтирующий двигатель такой же, как и на двигатель с последовательной обмоткой: скорость уменьшается, уменьшается противо-ЭДС и увеличивается напряжение сети. Но в двигателе с параллельным возбуждением повышенное сетевое напряжение вызывает увеличение тока якоря. В параллельном двигателе крутящий момент пропорционален току якоря, поэтому крутящий момент увеличивается. Этот дополнительный крутящий момент увеличивает скорость двигателя, чтобы компенсировать уменьшение, которое произошло при приложении нагрузки. Все это происходит мгновенно, что делает шунтирующие двигатели постоянного тока практически устройствами с постоянной скоростью, независимо от нагрузки.
С низким пусковым моментом и постоянной скоростью двигатели постоянного тока с параллельным возбуждением используются в приложениях, где требуется хорошее регулирование скорости при переменных нагрузках, таких как шлифовальные станки и токарные станки. Еще одно распространенное использование двигателей с параллельным возбуждением — это процессы, требующие постоянного напряжения, такие как печать и намотка.
Двигатели постоянного тока со смешанной обмоткой
Гибрид конструкции с последовательной обмоткой и параллельной обмоткой, двигатель постоянного тока со смешанной обмоткой имеет обмотку возбуждения, соединенную последовательно с обмоткой якоря, и другую обмотку возбуждения, соединенную параллельно (шунтирую) с обмоткой возбуждения. обмотка якоря. Существует несколько подтипов двигателей постоянного тока с комбинированной обмоткой, в зависимости от того, подключается ли шунтирующая обмотка возбуждения только к обмотке якоря (так называемая конструкция с «коротким шунтом») или шунтирующая обмотка возбуждения подключается к последовательной комбинации. якоря и обмотки возбуждения (так называемая конструкция с «длинным шунтом»).
В конструкции с коротким шунтом, если полярность шунтирующего поля совпадает с полярностью последовательного поля и якоря, он называется составным двигателем с совокупным возбуждением и имеет комбинированные характеристики двигателей с последовательным и параллельным возбуждением: высокая пусковой момент и хорошая регулировка скорости. И наоборот, если полярность шунтирующего поля противоположна полярности последовательного поля и якоря, это называется 9.0010 дифференциал составной двигатель.
Накопительные составные двигатели используются в самых разных областях, от конвейеров до тяжелого оборудования, такого как шаровые мельницы. Дифференциальные двигатели с комбинированной обмоткой имеют мало практических применений, поскольку они имеют тенденцию к превышению скорости при уменьшении нагрузки и значительному падению скорости при увеличении нагрузки.
Рубрики: Двигатели постоянного тока, Часто задаваемые вопросы + основы, Рекомендуемые
Все о двигателях постоянного тока с обмоткой серии — что это такое и как они работают
Кажется, невозможно представить мир без электродвигателя.
Все, что используется в повседневной жизни, — автомобиль, бытовая техника, даже розетки, которые дают нам постоянное электричество, — не было бы здесь, если бы не эти очень полезные машины. Благодаря достижениям 19 века и позже мы можем преобразовывать электрический ток в полезное механическое движение для выполнения всевозможных удивительных задач. В этой статье основное внимание будет уделено двигателю постоянного тока, одной из старейших форм электродвигателей, и тому, какую пользу он приносит нам по сей день. Мы специально исследуем двигатель постоянного тока с последовательной обмоткой (часто называемый «последовательным двигателем постоянного тока»), который почти во всех аспектах подобен другим типам двигателей постоянного тока, но имеет некоторые важные уникальные свойства. Эта статья призвана помочь читателям понять, что такое двигатель постоянного тока с последовательной обмоткой, как он работает и какие области применения могут быть полезны благодаря этой прочной конструкции электродвигателя.
Что такое двигатели постоянного тока с последовательным возбуждением и как они работают?
В большинстве случаев серийный двигатель постоянного тока идентичен другим типам коллекторных двигателей постоянного тока по конструкции и работе. Он состоит из двух жизненно важных компонентов, статора и ротора, которые взаимодействуют электрически и магнитно, создавая вращательное движение на выходном валу. Базовая конструкция двигателей постоянного тока относительно проста, упрощенная принципиальная схема показана на рисунке 1:
.
Рисунок 1: Принципиальная принципиальная схема двигателей постоянного тока. На этой диаграмме намеренно неясно показано, где находится поле статора по отношению к якорю; его расположение и источник питания являются основным отличием некоторых двигателей постоянного тока.
Как показано, поле статора воздействует на весь узел ротора, создавая постоянное магнитное поле; это поле может быть создано с помощью постоянного магнита или электромагнита, состоящего из проволочной обмотки (известной как «обмотка возбуждения», как показано на рисунке 1). Источник питания постоянного тока подключен к щеткам, зажимающим ротор, который представляет собой вращающийся узел, содержащий якорь, обмотки якоря, кольца коллектора и выходной вал. Якорь состоит из металлических пластин, в которых размещена обмотка якоря, расположенная вокруг выходного вала. Это непрерывная катушка проводящего провода, которая проходит через пластины якоря и заканчивается на кольцах коммутатора.
Якорь, при питании от защемления щеток на кольцах коллектора, действует как электромагнит и создает собственное магнитное поле так же, как и обмотка возбуждения. Когда оператор включает источник постоянного тока, ток проходит через щетки, через кольца коммутатора и в катушки якоря, где поле якоря начинает противодействовать постоянному магнитному полю статора. Затем ротор магнитно «отталкивается» от поля статора, но, поскольку он может вращаться только на месте, он создает полезную механическую мощность на выходном валу.
Зная эту информацию об общей работе двигателя постоянного тока, на Рисунке 2 теперь показано конкретное расположение серийных двигателей постоянного тока:
Рис. 2: Упрощенная принципиальная схема двигателей постоянного тока с последовательной обмоткой. Обратите внимание, как обмотка возбуждения последовательно соединена с узлом ротора.
Изучив рис. 2, становится ясно, почему эти двигатели известны как двигатели постоянного тока с «последовательной обмоткой»; их обмотка возбуждения питается от источника постоянного тока и включена последовательно с обмоткой якоря. Это означает, что тот же ток, который питает обмотки якоря, также питает обмотки возбуждения. Чтобы сделать это эффективно, обмотка возбуждения намотана всего несколькими витками провода большого сечения, чтобы она могла выдерживать полный ток якоря, а также ток статора и обеспечивать минимально возможное сопротивление. Это противоположно шунтирующим двигателям постоянного тока, обмотки возбуждения которых подключаются параллельно якорю, что приводит к различным эффектам (полное объяснение см. в нашей статье о шунтирующих двигателях постоянного тока). Если поменять местами выводы обмоток возбуждения или обмотки ротора, это может привести к изменению направления вращения двигателя и сделать эти двигатели реверсивными. Кроме того, с некоторыми незначительными модификациями эти двигатели могут работать от переменного тока и известны как универсальные щеточные двигатели.
Существует несколько основных спецификаций, которые могут помочь разработчикам выбрать правильную модель двигателя постоянного тока, и в этой статье мы кратко рассмотрим некоторые из них. Обратите внимание, что двигатели серии постоянного тока имеют больше спецификаций, чем описано в этом разделе, и в нем описаны только основные значения, которые должны быть известны в большинстве случаев.
Номинальное (номинальное) напряжение
Номинальное напряжение описывает источник питания постоянного тока, необходимый для работы двигателя. Это минимальное используемое значение, но допустимо и несколько большее значение. Обратите внимание, что использование более высокого напряжения может привести к повреждению/перегоранию двигателя из-за большого тока в обмотке возбуждения, поэтому следует соблюдать осторожность при превышении номинального напряжения.
Жизнь щетки
В этих двигателях используется механическая коммутация для подключения источника питания к обмоткам якоря; в результате угольные щетки, которые являются точками соединения для этой коммутации, со временем изнашиваются и должны периодически заменяться. Большинство двигателей постоянного тока обеспечивают срок службы используемых щеток (обычно в часах), и важно отслеживать, как долго щетки используются, чтобы предотвратить их повреждение.
Непрерывная и пиковая мощность
Мощность серийного двигателя постоянного тока, выраженная в л. с. или кВт, представляет собой выходную энергию, обеспечиваемую двигателем. Серийный двигатель постоянного тока в непрерывных приложениях должен быть рассчитан на его непрерывную мощность, поскольку пиковая мощность должна использоваться только в течение коротких периодов времени, например, при пуске.
Диапазон скоростей
Двигатели постоянного тока серии, когда их выходной вал разгружен, будут продолжать ускоряться, пока не разрушат себя. Это является следствием соединения обмотки возбуждения последовательно с якорем и является наиболее существенным недостатком этих двигателей. По этой причине эти двигатели ни при каких обстоятельствах не должны работать без нагрузки и всегда должны быть под нагрузкой. В большинстве листов спецификаций указан безопасный/максимальный диапазон оборотов, при котором эти двигатели не сломаются, и их следует тщательно учитывать при выборе модели двигателя.
Применение и критерии выбора
Из-за больших катушек в обмотках эти двигатели обеспечивают большой пусковой момент на низкой скорости. Обычно они предназначены для создания максимально возможного пускового момента и часто используются в качестве стартеров для других двигателей или в других промышленных приложениях. Как указывалось ранее, их управление скоростью довольно плохое, и управление скоростью достижимо только с помощью частотно-регулируемых приводов (ЧРП); однако, как правило, не рекомендуется использовать последовательный двигатель постоянного тока, если для конструкции важно регулирование скорости, поскольку другие электродвигатели были разработаны для достижения этой цели без дополнительных недостатков, таких как синхронные двигатели, асинхронные двигатели и шаговые двигатели (подробнее информацию можно найти в наших статьях все о синхронных двигателях, асинхронных двигателях и шаговых двигателях).
Это не означает, что двигатели постоянного тока с последовательной обмоткой обязательно менее полезны, чем электродвигатели других конструкций. Их нелинейная скорость и увеличенный начальный крутящий момент наиболее эффективно используются с большими грузами, такими как краны, лебедки и другие машины, которые должны перемещать тяжелые грузы медленно, а более легкие — быстрее. Его конструкция с регулируемой скоростью позволяет использовать его в пылесосах, швейных машинах, электроинструментах, тяговых устройствах, лифтах и многом другом. Это рабочая лошадка современной промышленности и отличная машина, если использовать ее в правильных условиях.
Резюме
В этой статье представлено понимание того, что такое двигатели постоянного тока с последовательным возбуждением и как они работают. Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу поиска поставщиков Thomas, чтобы найти потенциальные источники поставок или просмотреть сведения о конкретных продуктах.
Источники:
- https://itp.nyu.edu/physcomp/lessons/dc-motors/dc-motors-the-basics/
- http://www.ece.ua.edu/courses/material/EE410-Wms2/Electric%20motors.pdf
- http://www2.mae.ufl.edu/designlab/Class%20Projects/Background%20Information/Electric%20DC%20motors.htm
- http://fab.

