Как устроен двигатель постоянного тока с параллельным возбуждением. Каковы его основные характеристики. Как осуществляется пуск и регулирование частоты вращения такого двигателя. В чем преимущества параллельного возбуждения.
Устройство и принцип работы двигателя постоянного тока с параллельным возбуждением
Двигатель постоянного тока с параллельным возбуждением имеет следующую конструкцию:
- Обмотка якоря и обмотка возбуждения подключены параллельно к источнику питания
- Обмотка возбуждения расположена на основных полюсах статора
- Ток в обмотке возбуждения не зависит от тока якоря
Как работает такой двигатель?
- При подаче напряжения ток проходит по обмотке возбуждения, создавая магнитное поле статора
- Одновременно ток проходит через обмотку якоря
- Взаимодействие тока якоря с магнитным полем статора создает вращающий момент
- Якорь начинает вращаться, приводя в движение вал двигателя
Основные характеристики двигателя с параллельным возбуждением
Двигатель постоянного тока с параллельным возбуждением обладает следующими ключевыми характеристиками:

Механическая характеристика
Механическая характеристика показывает зависимость частоты вращения от момента нагрузки на валу. Для данного типа двигателя она имеет вид:
n = n0 — ΔnM
где:
- n — частота вращения
- n0 — частота вращения идеального холостого хода
- Δn — изменение частоты вращения под нагрузкой
- M — момент нагрузки
Механическая характеристика является жесткой — при изменении нагрузки частота вращения меняется незначительно.
Скоростная характеристика
Скоростная характеристика описывает зависимость частоты вращения от тока якоря:
n = (U — IяRя) / (cФ)
где:
- U — напряжение питания
- Iя — ток якоря
- Rя — сопротивление цепи якоря
- c — конструктивная постоянная двигателя
- Ф — магнитный поток
Особенности пуска двигателя параллельного возбуждения
Почему нельзя осуществлять прямой пуск двигателя с параллельным возбуждением?
- При прямом включении пусковой ток может превышать номинальный в 10-30 раз
- Это может привести к повреждению обмоток и коллектора
- Возникает большой пусковой момент, опасный для механической части
Как выполняется правильный пуск такого двигателя?

- В цепь якоря включается пусковой реостат
- Сопротивление реостата ограничивает пусковой ток до допустимого значения (2-2,5 от номинального)
- По мере разгона двигателя пусковой реостат постепенно выводится
- При достижении номинальной скорости пусковой реостат полностью выводится
Способы регулирования частоты вращения
Частота вращения двигателя постоянного тока с параллельным возбуждением может регулироваться следующими способами:
1. Изменение магнитного потока возбуждения
Как осуществляется регулирование магнитного потока?
- В цепь обмотки возбуждения включается регулировочный реостат
- При увеличении сопротивления реостата уменьшается ток возбуждения
- Это приводит к уменьшению магнитного потока
- Частота вращения при этом увеличивается
Преимущества данного способа:
- Экономичность — малая мощность потерь в реостате
- Плавность регулирования
- Широкий диапазон регулирования (до 2-3 раз от номинальной скорости)
2. Включение реостата в цепь якоря
Как работает реостатное регулирование?
- Последовательно с якорем включается регулировочный реостат
- При увеличении сопротивления реостата уменьшается напряжение на якоре
- Это приводит к снижению частоты вращения
Недостатки данного способа:
- Большие потери энергии в реостате
- Нестабильность частоты вращения при изменении нагрузки
Преимущества двигателей с параллельным возбуждением
Почему двигатели с параллельным возбуждением получили широкое распространение?
- Жесткая механическая характеристика — стабильная частота вращения при изменении нагрузки
- Плавность регулирования скорости в широком диапазоне
- Возможность работы в режиме холостого хода
- Простота реверсирования путем переключения полярности обмотки возбуждения
- Высокий КПД при номинальной нагрузке
Области применения двигателей постоянного тока с параллельным возбуждением
Где применяются двигатели данного типа?
- Металлорежущие станки
- Подъемно-транспортные механизмы
- Прокатные станы
- Бумагоделательные машины
- Вентиляторы и насосы
- Электротранспорт
Такой широкий спектр применения обусловлен возможностью плавного регулирования скорости и стабильностью частоты вращения при изменении нагрузки.
Сравнение с двигателями других типов возбуждения
Чем отличаются характеристики двигателя с параллельным возбуждением от двигателей с последовательным и смешанным возбуждением?

| Параметр | Параллельное возбуждение | Последовательное возбуждение | Смешанное возбуждение |
|---|---|---|---|
| Механическая характеристика | Жесткая | Мягкая | Промежуточная |
| Изменение скорости при нагрузке | Незначительное | Значительное | Умеренное |
| Пусковой момент | Средний | Высокий | Высокий |
| Возможность работы без нагрузки | Да | Нет | Да |
Заключение
Двигатели постоянного тока с параллельным возбуждением обладают рядом важных преимуществ:
- Стабильная частота вращения при изменении нагрузки
- Широкий диапазон регулирования скорости
- Высокий КПД
- Простота управления
Эти качества обеспечивают их широкое применение в различных отраслях промышленности, где требуется точное регулирование скорости и поддержание постоянных оборотов при переменной нагрузке. Однако при выборе типа двигателя необходимо учитывать конкретные требования механизма и условия эксплуатации.
Двигатель постоянного тока с параллельным возбуждением (независимым): принцип работы
Содержание
- Характеристики двигателя постоянного тока с параллельным возбуждением
- Сферы применения двигателя
- Регулирование частоты вращения
- Двигатель с независимым возбуждением
Двигатель постоянного тока с параллельным возбуждением – это электродвигатель, у которого обмотки якоря и возбуждения подключаются друг к другу параллельно. Часто по своей функциональности он превосходит агрегаты смешанного и последовательного типов в случаях, если необходимо задать постоянную скорость работы.
Характеристики двигателя постоянного тока с параллельным возбуждением
Формула общего тока, идущего от источника, выводится согласно первому закону Кирхгофа и имеет вид: I = Iя + Iв, где Iя — ток якоря, Iв – ток возбуждения, а I – ток, который двигатель потребляет от сети. Следует отметить, что при этом Iв не зависит от Iя, т.е. ток возбуждения не зависит от нагрузки. Величина тока в обмотке возбуждения меньше тока якоря и составляет примерно 2-5% от сетевого тока.
В целом, данные электродвигатели отличаются следующими весьма полезными тяговыми параметрами:
- Высокая экономичность (поскольку ток якоря не проходит через обмотку возбуждения).
- Устойчивость и непрерывность рабочего цикла при колебаниях нагрузки в широких пределах (т.к. величина момента сохраняется даже в случае изменения числа оборотов вала).
При недостаточном моменте пуск осуществляется посредством перехода на смешанный тип возбуждения.
Сферы применения двигателя
Поскольку частота вращения подобных двигателей остается почти постоянной даже при изменении нагрузки, а также может изменяться при помощи регулировочного реостата, они широко применяются в работе с:
- вентиляторами;
- насосами;
- шахтными подъемниками;
- подвесными электрическими дорогами;
- станками (токарными, металлорежущими, ткацкими, печатными, листоправильными и пр.).
Таким образом, этот вид двигателей в основном используется с механизмами, требующими постоянства скорости вращения или ее широкой регулировки.
Регулирование частоты вращения
Регулирование скорости – это целенаправленное изменение скорости электродвигателя в принудительном порядке при помощи специальных устройств или приспособлений. Оно позволяет обеспечить оптимальный режим работы механизма, его рациональное использование, а также уменьшить расход энергии.
Существует три основных способа регулирования скорости двигателя:
- Изменение магнитного потока главных полюсов. Осуществляется при помощи регулировочного реостата: при увеличении его сопротивления магнитный поток главных полюсов и ток возбуждения Iв уменьшаются. При этом увеличивается число оборотов якоря на холостом ходу, а также угол наклона механической характеристики. Жесткость механических характеристик сохраняется. Однако увеличение скорости может привести к механическим повреждениям агрегата и к ухудшению коммутации, поэтому не рекомендуется увеличивать частоту вращения этим методом более чем в два раза.
- Изменение сопротивления цепи якоря. К якорю последовательно подключается регулировочный реостат. Скорость вращения якоря уменьшается при увеличении сопротивления реостата, а наклон механических характеристик увеличивается. Регулировка скорости вышеуказанным способом:
- способствует уменьшению частоты вращения относительно естественной характеристики;
- связана с большой величиной потерь в регулировочном реостате, следовательно, неэкономична.
- Безреостатное изменение подаваемого на якорь напряжения. В этом случае необходимо наличие отдельного источника питания с регулируемым напряжением, например, генератора или управляемого вентиля.
Двигатель с независимым возбуждением
Двигатель постоянного тока независимого возбуждения как раз и реализует третий принцип регулирования скорости. Его отличие в том, что обмотка возбуждения и магнитное поле главных полюсов подключаются к разным источникам. Ток возбуждения является неизменной характеристикой, а магнитное поле меняется. При этом изменяется число оборотов вала на холостом ходу, жесткость характеристики остается прежней.
Таким образом, принцип работы дпт с независимым возбуждением является достаточно сложным вследствие независимой работы двух источников, тем не менее, его главное преимущество – большая экономичность.
Двигатели параллельного возбуждения | Электротехника
Схема двигателя.
Схема двигателя параллельного возбуждения изображена на рис. 1.25. Обмотка якоря и обмотка возбуждения включены параллельно. В этой схеме: I – ток, потребляемый двигателем из сети, Iя – ток якоря, Iв –ток возбуждения. Из первого закона Кирхгофа следует, что I = Iя + Iв.
Естественная механическая характеристика. Естественная механическая характеристика описывается формулой (1.6).
При холостом ходе М = 0 и nх = U/СЕФ.
Если Ф = const, то уравнение механической характеристики принимает вид:
n = nх – bМ, (1.8)
где b = Rя/СЕФ.
Из (1.8) следует, что механическая характеристика (рис. 1.26, прямая 1) – прямая с углом наклона a и угловым коэффициентом b. Так как у двигателей постоянного тока Rя мало, то с увеличением нагрузки на валу частота вращения n изменяется незначительно – характеристики подобного типа называются «жесткими».
Ток, потребляемый двигателем из сети, практически растет пропорционально моменту нагрузки. Действительно, М » Мэм = См Iя Ф, и так как у двигателя параллельного возбуждения Ф = const, то Iя ~ М.
Регулирование частоты вращения.
Регулирование частоты вращения возможно из (1.6) тремя способами: изменением магнитного потока главных полюсов Ф, изменением сопротивления цепи якоря Rя и изменением подводимого к цепи якоря напряжения U (изменение n за счет изменения момента нагрузки М в понятие регулирования не входит).
Регулирование n изменением магнитного потока Ф осуществляется с помощью регулировочного реостата Rр. При увеличении сопротивления реостата ток возбуждения Iв имагнитный поток главных полюсов Ф уменьшаются. Это приводит, во-первых, к увеличению частоты вращения холостого хода nх и, во-вторых, к увеличению коэффициента b, т.е. к увеличению угла наклона механической характеристики. Однако b остается небольшим и жесткость механических характеристик сохраняется. На рис. 1.28 помимо естественной характеристики 1, соответствующей максимальному магнитному потоку Ф, приведено семейство механических характеристик 2-4, снятых при уменьшенном магнитном потоке. Из характеристик следует, что изменением магнитного потока можно только увеличивать частоту вращения относительно естественной характеристики. Практически частоту вращения таким методом можно увеличивать не более чем в 2 раза, так как увеличение скорости приводит к ухудшению коммутации и даже механическим повреждениям машины.
Другой способ регулирования скорости связан с включением последовательно с якорем регулировочного реостата Rя.р (пусковой реостат Rп для этой цели непригоден, так как он рассчитан на кратковременный режим работы). Формула (1.6) при этом принимает вид:
n = ,
(1.9)
откуда следует, что скорость при холостом ходе при любом сопротивлении Rя.р одинакова, а коэффициент b и, следовательно, наклон механических характеристик 5-7 увеличивается (рис. 1.26). Регулирование частоты вращения этим способом приводит к уменьшению частоты вращения относительно естественной характеристики. Кроме того, оно неэкономично, так как связано с большой мощностью потерь (Rя.р I) в регулировочном реостате, по которому протекает весь ток якоря.
Третий способ регулирования частоты вращения – безреостатное изменение подводимого к якорю напряжения. Он возможен только в случае, когда якорь двигателя питается от отдельного источника, напряжение которого можно регулировать. В качестве регулируемого источника применяются отдельные, специально предназначенные для данного двигателя генераторы или управляемые вентили (тиратроны, ртутные выпрямители, тиристоры). В первом случае образуется система машин, называемая системой Г-Д (генератор – двигатель), (рис. 1.27). Она применяется для плавного регулирования в широких пределах частоты вращения мощных двигателей постоянного тока и в системах автоматического управления. Система регулирования с управляемыми вентилями УВ (рис. 1.28) находит применение для регулирования частоты вращения двигателей меньшей мощности. Ее преимущество – большая экономичность.
Регулирование частоты вращения изменением U практически возможно только в сторону уменьшения, так как увеличение напряжения выше номинального недопустимо из-за резкого ухудшения коммутации. Из (1.9) следует, что при уменьшении напряжения уменьшается скорость холостого хода nх, а наклон механических характеристик 8-10 не изменяется (см. рис. 1.26), они остаются жесткими даже при низких напряжениях. Диапазон регулирования (nmax/nmin) таким способом 6:1-8:1. Он может быть значительно расширен при применении специальных схем с обратными связями.
Регулировочная характеристика.
Регулировочная характеристика n=f(Iв) двигателя параллельного возбуждения изображена на рис. 1.29.
Ее характер определяется зависимостью (1.5), из которой следует, что частота вращения обратно пропорциональна магнитному потоку и, следовательно, току возбуждения Iв. При токе возбуждения Iв = 0, что может быть при обрыве цепи возбуждения, магнитный поток равен остаточному Фост и частота вращения становится настолько большой, что двигатель может механически разрушиться, – подобное явление называется разносом двигателя.
Физически явление разноса объясняется тем, что вращающий момент (1.2) при уменьшении магнитного потока, казалось бы, должен уменьшиться, однако ток якоря Iя = (U – E)/Rя увеличивается значительнее, так как уменьшается Е (1.1) и разность U – E увеличивается в большей степени (обычно Е » 0,9 U).
Тормозные режимы.
Тормозные режимы двигателя имеют место тогда, когда электромагнитный момент, развиваемый двигателем, действует против направления вращения якоря. Они могут возникать в процессе работы двигателя при изменении условий работы или создаваться искусственно с целью быстрого уменьшения скорости, остановки или реверсирования двигателя.
У двигателя параллельного возбуждения возможны три тормозных режима: генераторное торможение с возвратом энергии в сеть, торможение противовключением и динамическоеторможение.
Генераторное торможение возникает в тех случаях, когда частота вращения якоря n становится больше частоты вращения при идеальном (т.е. при Мпр = 0) холостом ходе nx(n>nx). Переход в этот режим из режима двигателя возможен, например, при спуске груза, когда момент, создаваемый грузом, приложен к якорю в том же направлении, что и электромагнитный момент двигателя, т.е. тогда, когда момент нагрузки действует согласно с электромагнитным моментом двигателя и он набирает скорость, большую чем nx. Если n>nx, то Е>Uc(где Uc– напряжение сети) и ток двигателя изменяет свой знак (1.4) – электромагнитный момент из вращающего становится тормозным, а машина из режима двигателя переходит в режим генератора и отдает энергию в сеть (рекуперация энергии). Переход машины из двигательного режима в генераторный иллюстрируется механической характеристикой (рис. 1.30). Пусть в двигательном режиме a1 – рабочая точка; ей соответствует момент М. Если частота вращения увеличивается, то рабочая точка по характеристике 1 из квадранта I переходит в квадрант II, например, в рабочую точку a2, которой соответствует частота вращения n΄ и тормозной момент – М΄.
Торможение противовключением возникает в работающем двигателе, когда направление тока в якоре или тока возбуждения переключается на противоположное. Электромагнитный момент при этом изменяет знак и становится тормозным.
Работе двигателя с противоположным направлением вращения соответствуют механические характеристики, располагающиеся в квадрантах II и III (например, естественная характеристика 2 на рис. 1.30).
Внезапный переход на эту характеристику практически недопустим, так как сопровождается чрезмерно большим броском тока и тормозного момента. По этой причине одновременно с переключением одной из обмоток в цепь якоря включается добавочное сопротивление Rдоб, ограничивающее ток якоря.
Механическая характеристика режима с Rдоб имеет большой наклон (прямая 3). При переходе в режим противовключения частота вращения n в первый момент измениться не может (из-за инерционности якоря) и рабочая точка из положения a1 перейдет в положение a3 на новой характеристике. Из-за появления Мтор частота вращения n будет быстро падать до тех пор, пока рабочая точка a3 не перейдет в положение a4, соответствующее остановке двигателя. Если в этот момент двигатель не отключить от источника питания, то якорь изменит направление вращения. Машина начнет работать в двигательном режиме с новым направлением вращения, а ее рабочая точка a5 будет находиться на механической характеристике 3 в квадранте III.
Динамическое торможение возникает в тех случаях, когда якорь двигателя отключается от сети и замыкается на сопротивление динамического торможения Rд.т. Уравнение характеристики (1.6) принимает вид:
n =
что соответствует семейству прямых 4 (при разных Rд.т), проходящих через начало координат. При переключении в этот режим рабочая точка a1 переходит на одну из характеристик 4, например, в точку a6, а затем перемещается по прямой 4 до нуля. Якорь двигателя тормозится до полной остановки. Изменением сопротивления Rд.т можно регулировать ток якоря и скорость торможения.
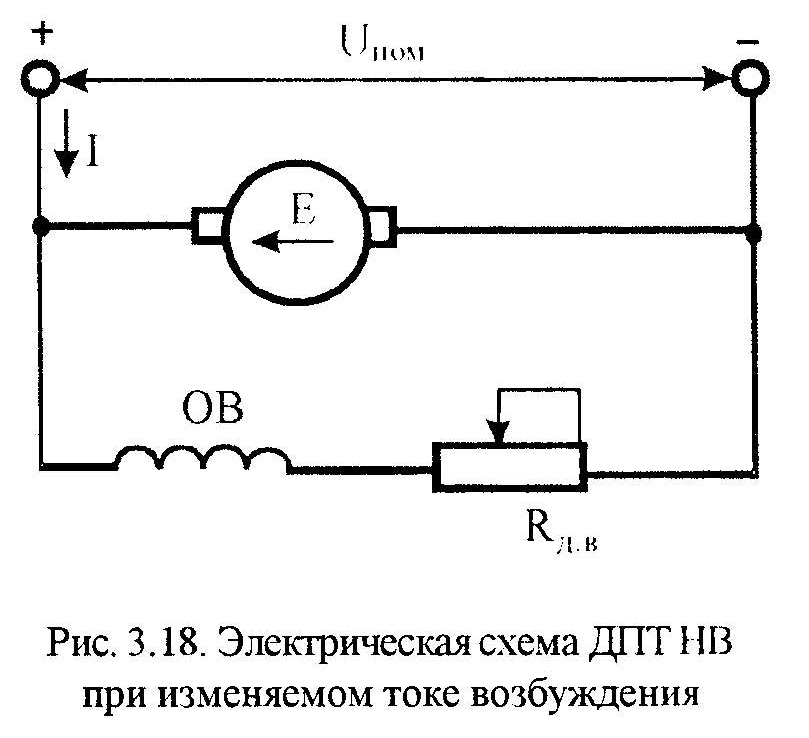
6.2.5. Двигатель постоянного тока с параллельным возбуждением
Пуск двигателя. Внутреннее сопротивление якоря машины невелико. У двигателей средней и большой мощности оно имеет величину порядка десятых-сотых долей Ома. При прямом включении двигателя в сеть пусковой ток IЯ.П =(14) достигает (10-30)IН.
Поэтому прямой пуск двигателя недопустим. Такой большой пусковой ток опасен для двигателя и сети, напряжение в сети может значительно снизиться, кроме того, возникнет толчок момента, действующего на передачу и рабочий механизм.
Для ограничения силы пускового тока последовательно с обмоткой якоря включают пусковой реостат rП (рис.27). Тогда токIЯ.П = (15)
Сопротивление пускового реостата выбирают таким образом, чтобы сила пускового тока не превышала кратковременно допустимого номинального значения силы тока якоря (2-2,5) IЯ. По мере увеличения частоты вращения двигателя растет противодействующая ЭДС якоря, которая направлена против подведенного напряжения, и ток снижается, поэтому сопротивление пускового реостата постепенно уменьшают до нуля. Пусковой реостат включается на 2-3 секунды и не рассчитан на длительное протекание тока. Двигатели мощностью до 1 кВт имеют сравнительно большое сопротивление якоря, поэтому их включают без пусковых реостатов.
При номинальной частоте вращения двигателя имеемIЯ= (16)
Для определения частоты вращения двигателя подставим в формулу (16) значение ЭДС из формулы (6), получимIЯ=,откуда n = (17)
Уравнение (17) п = f(IЯ) носит название скоростной характеристики и указывает на то, что частота вращения двигателя прямо пропорциональна подведенному напряжению и обратно пропорциональна магнитному потоку.
При пуске двигателя регулировочный реостат в цепи возбуждения полностью выводится, чтобы обеспечить максимальное значение силы тока в цепи возбуждения и магнитного потока статора. Из формулы (17) видно, что при большом пусковом токе в якоре уменьшается числитель, а при большом токе в цепи возбуждения увеличивается знаменатель, что обеспечивает плавный пуск двигателя при достаточном вращающем моменте якоря для преодоления механического сопротивления.
На практике пользуются зависимостью п=f(М), называемой механической характеристикой. Подставим в уравнение (17) значение момента двигателя (10) М = СмФ IЯ, в результате чего получимп= — (18)
Полученное уравнение является уравнением механической характеристики, связывающим зависимость установившейся частоты вращения двигателя от момента при постоянном напряжении сети и сопротивлении цепи якоря.
Рис. 27. Схема двигателя постоянного тока с параллельным возбуждением
В двигателях параллельного и независимого возбуждения поток Ф практически постоянный, поэтому механическая характеристика представляется уравнением прямой (рис. 28), слегка наклоненной к оси абсцисс. В выражении (18) первое слагаемое уравнения носит название частоты идеального холостого хода и обозначается n0 , второе слагаемое — потери частоты вращения двигателя под нагрузкой ∆n. Тогда уравнение механической характеристики двигателя можно записать так: п = п0 — ∆n. Изменение частоты вращения двигателя при номинальной нагрузке составляет (3-8) % п0. Такая механическая характеристика считается жесткой.
Регулирование частоты вращения двигателя с параллельным возбуждением. Рассмотрим способы регулирования частоты вращения двигателя при неизменном тормозном моменте на валу.
Из уравнения механической характеристики (18) видно, что изменение п возможно при регулировании напряжения питания U, потока возбуждения Ф и величины сопротивления цепи якоря rЯ , CЕ и СМ — конструктивные коэффициенты, изменить которые мы не можем.
Регулирование частоты вращения изменением приложенного напряжения не применяется, так как с изменением силы тока изменяется и магнитный поток машины, а при малых напряжениях можно размагнитить машину.
А) Регулирование «на уменьшение потока» (полюсное регулирование)
Из формулы п0 = следует, чточастота вращения идеального холостого хода обратно пропорциональна потоку. Пока магнитная система машины не насыщена, поток можно считать пропорциональным силе тока возбуждения IВ. Следовательно, частоту вращения двигателя можно регулировать изменением силы тока возбуждения, для чего в цепь возбуждения вводится реостат (рис. 27). С увеличением сопротивления rВ уменьшается сила тока возбуждения IВ, вследствие чего уменьшается поток Ф. Уменьшение потока возбуждения ведет к увеличению частоты вращения идеального холостого хода п0. Потери частоты вращения ∆n будут обратно пропорциональны квадрату магнитного потока.
Таким образом, изменением потока возбуждения можно регулировать частоту вращения двигателя. На рис. 29 приведены искусственные механические характеристики. При значительном уменьшении силы тока возбуждения (особенно при обрыве цепи возбуждения) силы тока якоря и частота вращения ненагруженного двигателя сильно возрастают, что может привести к опасным механическим повреждениям. Это явление недопустимо, поэтому двигатель должен быть снабжен автоматической защитой, отключающей его от сети при предельном уменьшении потока (ниже ‘/3ФН).
Регулирование «на уменьшение потока», называемое еще полюсным регулированием, весьма распространено, так как оно экономично и удобно в связи с тем, что сила тока возбуждения мала и мощность потерь в реостате мала.
Б) Реостатное регулирование. При этом способе регулирования, при Ф=const, последовательно с якорем включается регулировочный реостат. Уравнение механической характеристики имеет вид: п= — (19)
Анализ уравнения (19) показывает, что при изменении rР изменяется только ∆n, т. е. увеличивается наклон механической характеристики (рис.30). Изменяя rР, увеличивая его, можно получить семейство механических характеристик, более мягких, чем естественная механическая характеристика с частотой вращения п1, п2 и п3. У всех этих характеристик общая точка п0 — частота вращения идеального холостого хода двигателя. Такое регулирование неэкономично, так как через регулировочный реостат проходит весь ток якоря IЯ, а это обусловливает значительные потери мощности ∆Р = rР I2.
Рис. 28. Механическая характеристика двигателя с параллельным возбуждением
Рис. 29.Искусственные механические характеристики двигателя
Реверсирование двигателей постоянного тока. Под реверсированием понимают изменение направления вращения якоря двигателя.
Если изменить направление магнитного потока или тока якоря, то знак, а значит, и направление вращения двигателя изменятся. Однако одновременное изменение направления потока и тока якоря к изменению знака вращающего момента не приводит. Практически реверсирование осуществляется переключением выводов обмотки якоря или обмотки возбуждения.
Рис. 30. Механические характеристики реостатного регулирования
Двигатели постоянного тока с различными системами возбуждения
Страница 7 из 30
Существует две системы возбуждения двигателей постоянного тока: возбуждение от постоянных магнитов; возбуждение от сети, питающей двигатель.
Наиболее распространена вторая система возбуждения. Двигатели с возбуждением от сети встречаются трех видов: с параллельным, последовательным и смешанным возбуждением. Рассмотрим двигатели с наиболее распространенными системами возбуждения.
Рис. 49. Характеристики двигателя параллельного возбуждения:
а — скоростная; б — моментная; ев— к.п.д.; г — механические.
Двигатель с параллельным возбуждением и его характеристики. Обмотка возбуждения двигателя располагается на основных полюсах и включается параллельно с якорем в сеть (рис. 48). Электрическую энергию двигатель получает от сети через рубильник 4 и преобразует ее в механическую энергию, которая используется рабочей машиной 3.
Рис. 48. Схема включения двигателя параллельного возбуждения:
1— якорь; 2 — обмотка возбуждения; 3 — рабочая машина; 4 — рубильник; 5— реостат в цепи якоря; 6 — реостат в цепи возбуждения.
Механическая характеристика двигателя — зависимость частоты вращения от момента при низменных напряжении и токе возбуждения, а также при постоянном добавочном сопротивлении в цепи якоря. При отсутствии добавочного сопротивления в якорной цепи получается естественная характеристика. Свойство механических характеристик при различных сопротивлениях в якорной цепи показано на рисунке 49, г.
1— якорь; 2 — обмотка возбуждения; 3— рабочая машина; 4 — рубильник; 5 — реостат в цепи якоря.
Рис. 51. Характеристики двигателя последовательного возбуждения:
а — скоростная, б — моментная; I в — к. п. д.; г — механические.
Рис. 50. Схема включения двигателя последовательного возбуждения:
Двигатель с последовательным возбуждением и его характеристики. Обмотка возбуждения двигателя располагается на основных полюсах и включается последовательно с якорем в сеть (рис. 50).
Скоростная характеристика — зависимости частоты вращения якоря от полезной мощности на валу при неизменном напряжении якорной цепи. В двигателе последовательного возбуждения ток якоря является одновременно и током возбуждения; с увеличением ток; якоря растет магнитный поток машины. При увеличении полезной мощности на валу частота вращения уменьшается главным образом из-за увеличения магнитного потока, а также из-за падения напряжения в якорной це Пи (см. формулу 67). Скоростная характеристика показана на рисунке 51, а. Двигатель последовательного возбуждения нельзя включать без нагрузки, так как часто та вращения в этом случае может достигнуть опасно; величины.
Моментная характеристика — зависимости момента от полезной мощности на валу при неизменной напряжения якорной цепи (рис. 51,б). Момент двигателя увеличивается прямопропорционально току якоря и потоку, а поток зависит от тока. В двигателе последовательного возбуждения момент изменяется почти пропорционально квадрату тока.
Рис. 52. Схема включения двигателя смешанного возбуждения:
Характеристика к. п. д.— зависимость к. п. д. от полезной мощности на валу при неизменном напряжении якорной цепи (рис. 51,в). Эта характеристика аналогична характеристике двигателя параллельного возбуждения.
1— якорь; 2 — параллельная обмотка возбуждения;
3 — последовательная обмотка возбуждения; 4 — рабочая машина; 5— рубильник; 6— реостат в цепи якоря; 7 — реостат в цепи параллельной обмотки возбуждения.
Механическая характеристика — зависимость частоты вращения от момента при неизменном напряжении якорной цепи (по форме напоминает скоростную характеристику). Семейство механических характеристик показано на рисунке 51, г.
Двигатель смешанного возбуждения и его характеристики.
Параллельную и последовательную обмотки возбуждения двигателя располагают на основных полюсах. Схема включения двигателя смешанного возбуждения сказана на рисунке 52. В двигателе смешанного возбуждения магнитный поток машины создается двумя обмотками:
(68)
де Фш и Фс—соответственно потоки параллельной и последовательной обмоток.
Обмотки возбуждения можно включать согласно, в том случае потоки складываются, при встречном включении — поток последовательной обмотки вычитается из потока параллельной обмотки.
Наиболее распространенным является согласное включение обмоток возбуждения. При этом характеристики двигателя занимают промежуточное положение между характеристиками двигателей параллельного и последовательного возбуждения, но ближе к первым.
Регулирование частоты вращения двигателей
Из формулы 67 следует, что частоту вращения двигателей можно менять изменением напряжения на якорь (якорной цепи) и изменением потока.
При введении добавочного сопротивления в якорную цепь частота вращения уменьшается. При уменьшении потока частота вращения растет.
В двигателе параллельного возбуждения поток можно уменьшить введением сопротивления в цепь возбуждения.
В двигателях последовательного возбуждения поток можно уменьшить шунтированием обмотки возбуждена а увеличить шунтированием обмотки якоря. Частоту вращения двигателей постоянного тока можно плавно peгулировать в широких пределах при высоком к. п. д. — это их главное преимущество перед асинхронными двигателями.
Потери в машинах постоянного тока
Суммарные потери в машине постоянного тока выражаются формулой:
(691
где Рмах— механические потери, Вт; рс—потери в стали, Вт; рм—потери в меди якоря, Вт; рв—потери в обмотках возбуждения, Вт; рщ— потери в щетках, Вт; рд—добавочные потери, Вт.
Коэффициент полезного действия может быть определен по формуле 44.
Двигатель постоянного тока с параллельным возбуждением
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПОСТОЯННОГО ТОКА
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ КАЗАНСКИЙ ГОСУДАРСТВЕННЫЙ АРХИТЕКТУРНО-СТРОИТЕЛЬНЫЙ УНИВЕРСИТЕТ Кафедра физики, электротехники и автоматики ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПОСТОЯННОГО ТОКА Методические
ПодробнееЭЛЕКТРИЧЕСКИЕ МАШИНЫ
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ КАЗАНСКИЙ ГОСУДАРСТВЕННЫЙ АРХИТЕКТУРНО-СТРОИТЕЛЬНЫЙ УНИВЕРСИТЕТ Кафедра автоматики и электротехники ЭЛЕКТРИЧЕСКИЕ МАШИНЫ Методические указания к лабораторным
ПодробнееТема 8.2. Двигатели постоянного тока
Тема 8.2. Двигатели постоянного тока Вопросы темы 1. ринцип работы двигателя постоянного тока. 2. Способы возбуждения двигателей постоянного тока. 1. ринцип работы двигателя постоянного тока Рис. 9. ринцип
ПодробнееЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ КАЗАНСКИЙ ГОСУДАРСТВЕННЫЙ АРХИТЕКТУРНО- СТРОИТЕЛЬНЫЙ УНИВЕРСИТЕТ Кафедра физики, электротехники и автоматики ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА
ПодробнееМашины постоянного тока
Машины постоянного тока 1 Электрические машины постоянного тока двигатели генераторы Двигатели — металлургическая промышленность, электрический транспорт Генераторы -питание электролитическихванн; зарядка
ПодробнееОбщие сведения об электродвигателях
Общие сведения об электродвигателях Электродвигатель. Виды электродвигателей и их конструктивные особенности. Устройство и принцип действия электродвигателя Электродвигатель преобразует электроэнергию
ПодробнееЭлектрические машины
1 Электрические машины Общие сведения Лекции профессора Полевского В.И. Лекция 1 Электрическая машина представляет собой электромеханическое устройство, осуществляющее преобразование механической и электрической
ПодробнееОП.10 ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА Федеральное государственное бюджетное образовательное учреждение высшего образования «Петербургский государственный университет путей сообщения Императора
ПодробнееГенератор постоянного тока
Министерство образования Российской Федерации Томский государственный педагогический университет И.С. Кашинская Генератор постоянного тока методическое указание Томск 2003 УДК 621.3 Печатается по решению
ПодробнееДвигатели постоянноготока
Двигатели постоянноготока 1 Двигательспараллельным возбуждением U В w пар R пуск R ш Е R Р 2 3 Если ОВ подключить через регулировочный реостат к другому источнику постоянного напряжения, то получится двигатель
ПодробнееОднофазный трансформатор.
050101. Однофазный трансформатор. Цель работы: Ознакомиться с устройством, принципом работы однофазного трансформатора. Снять его основные характеристики. Требуемое оборудование: Модульный учебный комплекс
ПодробнееСинхронные электрические машины
1 Синхронные электрические машины Общие сведения и элементы конструкции Лекции профессора Полевского В.И. Синхронными машинами называются электрические машины переменного тока, у которых магнитное поле,
Подробнее9. МАШИНЫ ПОСТОЯННОГО ТОКА
9. МАШИНЫ ПОСТОЯННОГО ТОКА Машины постоянного тока являются обратимыми машинами, т.е. они могут работать как в режиме генератора, так и в режиме двигателя. Двигатели постоянного тока имеют преимущества
ПодробнееЕ.И. Забудский ЛАБОРАТОРНАЯ РАБОТА 5 ИССЛЕДОВАНИЕ ТРЕХФАЗНОГО АСИНХРОННОГО ГЕНЕРАТОРА Оглавление 1. Цель работы… 3 2. Программа работы 3 3. Основы теории… 4. Экспериментальные исследования… 4 4.1.
ПодробнееТеоретические вопросы
Теоретические вопросы 1 Применение, устройство и виды трансформаторов 2 Принцип действия трансформатора, режимы работы 3 Схема замещения трансформатора и его внешняя характеристика 4 Опыты холостого хода
Подробнее«ЭЛЕКТРОТЕХНИКА И ЭЛЕКТРОНИКА»
МИНИСТЕРСТВО ОБРЗОВНИЯ И НУКИ РФ ФЕДЕРЛЬНОЕ ГОСУДРСТВЕННОЕ БЮДЖЕТНОЕ ОБРЗОВТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНЛЬНОГО ОБРЗОВНИЯ УФИМСКИЙ ГОСУДРСТВЕННЫЙ ВИЦИОННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ КОМПЛЕКТ ТТЕСТЦИОННЫХ
Подробнееhttp://library.bntu.by/kacman-m-m-elektricheskie-mashiny Предисловие…З Введение… 4 В.1. Назначение электрических машин и трансформаторов… 4 В.2. Электрические машины электромеханические преобразователи
ПодробнееОДНОФАЗНЫЙ АСИНХРОННЫЙ ДВИГАТЕЛЬ.
ОДНОФАЗНЫЙ АСИНХРОННЫЙ ДВИГАТЕЛЬ Вопросы лекции: 1 Общие сведения о однофазном асинхронном двигателе 2 Принцип подключения асинхронного двигателя в однофазную сеть 3 Схемы подключения трехфазного асинхронного
Подробнее/ 2 (1.5) , (1.6) J w. = π (1.7) 30
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ УХТИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ И МАХОВОГО МОМЕНТА
ПодробнееСЕКЦИЯ: ПРОФЕССИОНАЛЬНОЕ ОБРАЗОВАНИЕ
Морякова А.В., Никитаева Т.В. Лабораторная установка для исследования асинхронного электродвигателя // V-я Всероссийская научно-практическая конференция «Особенности применения образовательных технологий
ПодробнееЭлектрические машины
Согласно учебному плану направления 241000.62 (18.03.02) «Энерго- и ресурсосберегающие процессы в химической технологии, нефтехимии и биотехнологии», профиль «Охрана окружающей среды и рациональное использование
ПодробнееЭЛЕКТРОПРИВОД ЛАБОРАТОРНЫЕ РАБОТЫ
Кафедра автоматизированного электропривода и электротехники ЭЛЕКТРОПРИВОД ЛАБОРАТОРНЫЕ РАБОТЫ Санкт-Петербург 2014 МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ
Подробнее7. АСИНХРОННЫЕ ДВИГАТЕЛИ Основные понятия
7. АСИНХРОННЫЕ ДВИГАТЕЛИ 7.1. Основные понятия Асинхронные машины относятся к классу электрических машин переменного тока. Мощность асинхронных машин может быть от долей ватта до нескольких тысяч киловатт.
ПодробнееОСНОВЫ ЭЛЕКТРОТЕХНИКИ
М. И. КУЗНЕЦОВ ОСНОВЫ ЭЛЕКТРОТЕХНИКИ ПЯТОЕ ИЗДАНИЕ, ПЕРЕРАБОТАННОЕ ПОД РЕДАКЦИЕЙ КАНД. ТЕХН. НАУК С. В. СТРАХОВА Одобрено Ученым советом по профессионально-техническому образованию Главного управления
ПодробнееОСНОВЫ ТЕОРИИ ЭЛЕКТРИЧЕСКИХ МАШИН
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ «ВОЛЖСКАЯ ГОСУДАРСТВЕННАЯ АКАДЕМИЯ ВОДНОГО ТРАНСПОРТА» САМАРСКИЙ ФИЛИАЛ ФГБОУ ВО «ВГАВТ» УПРАВЛЕНИЕ СПО САМАРСКИЙ РЕЧНОЙ
ПодробнееТЕМА 2. ТРЕХФАЗНЫЕ АСИНХРОННЫЕ ДВИГАТЕЛИ
ТЕМА 2. ТРЕХФАЗНЫЕ АСИНХРОННЫЕ ДВИГАТЕЛИ Задание 1. Начертите эскиз поперечного разреза двухполюсного асинхронного двигателя (АД). Задание 2. Изобразите картину результирующего магнитного поля статора
ПодробнееТема 10. Основы электропривода
Тема 0. Основы электропривода Вопросы темы. Электропривод: определение, состав, классификация.. Номинальные параметры электрических машин. 3. Режимы работы электродвигателей. 4. Выбор типа и мощности электродвигателя..
ПодробнееГЕНЕРАТОР ПОСТОЯННОГО ТОКА
ГЕНЕРАТОР ПОСТОЯННОГО ТОКА 1. Общие сведения о машинах постоянного тока. 2. Принцип действия генератора постоянного тока. 3. Принцип работы двигателя постоянного тока. 4. Рабочий процесс машины постоянного
ПодробнееОбмотка — возбуждение — двигатель — постоянный ток
Обмотка — возбуждение — двигатель — постоянный ток
Cтраница 1
Обмотка возбуждения двигателей постоянного тока всех размеров работает удовлетворительно и за переломом кривой насыщения, обеспечивая этим меньшую чувствительность момента к изменениям напряжения возбуждения и больший удельный момент двигателя. Если в приборной следящей системе используются двигатели с возбуждением от постоянного магнита, то необходимо предусмотреть хорошую компенсацию, чтобы предупредить размагничивание магнитов от внезапных перемен направления сигнала. На рис. 7 — 30 показан типовой серводвигатель с возбуждением от постоянного магнита. Характерные кривые для этой машины показаны на рис. 7 — 29 при двух значениях напряжения. Конструкция полюсов этой машины состоит из отливки Alnico VI в форме кругового кольца, которое полностью охватывает якорь. [1]
Производится измерение сопротивления обмотки возбуждения двигателя постоянного тока. Для измерения применены: магнитоэлектрический вольтметр со шкалой на 150 делений, с пределом измерения 15 в, и такой же амперметр с пределом измерения 0 3 а. Сопротивление цепи вольтметра составляет 5000 ом. [2]
При обрыве цепи обмотки возбуждения двигателя постоянного тока с параллельным возбуждением исчезнет ток возбуждения и, следовательно, магнитный поток, создаваемый им. [3]
При обрыве цепи обмотки возбуждения двигателя постоянного тока с параллельным возбуждением исчезнет ток возбуждения и, следовательно, магнитный поток, создаваемый им. Останется лишь магнитный потек остаточного намагничивания, который составляет не более 3 — 5 % номинального потока. [4]
Что произойдет при обрыве обмотки возбуждения двигателя постоянного тока с параллельным возбуждением, если он работает: а) с номинальным моментом на валу Мс Мном; б) вхолостую. [5]
Например, условия охлаждения обмотки возбуждения двигателя постоянного тока параллельного возбуждения практически остаются неизменными и при остановке двигателя, а условия охлаждения якоря при остановке сильно ухудшаются. По этой причине двигатель постоянного тока, рассчитанный для длительного режима на неизменные условия охлаждения, при повторно-кратковременном режиме будет использоваться нерационально: при предельном допустимом нагреве обмотки якоря и коллектора обмотка возбуждения будет нагреваться значительно ниже допустимой температуры. [6]
Защита от перенапряжения на обмотке возбуждения двигателя постоянного тока требуется при ее отключении от источника питания. В этом режиме вследствие быстрого спадания тока возбуждения и тем самым магнитного потока в обмотке возникает значительная ( до нескольких киловольт) ЭДС самоиндукции, которая может вызвать пробой ее изоляции. [8]
Что произойдет при обрыве цепи обмотки возбуждения двигателя постоянного тока с параллельным возбуждением, если он работает: а) с номинальным моментом на валу McAia; б) вхолостую. [9]
Одновременное изменение тока в якоре и обмотке возбуждения двигателя постоянного тока не изменяет его направления вращения. Это свойство используется в коллекторных двигателях переменного тока, где ток с частотой сети одновременно изменяет свое направление в обеих обмотках. [10]
В отдельных случаях, например при питании обмоток возбуждения двигателя постоянного тока от постороннего источника или при очень большой частоте пусков двигателя с ко-роткозамкнутым ротором, может возникнуть необходимость проверки условий нагрева отдельно для этих частей двигателя. [12]
К ним относятся защиты от перенапряжения на обмотке возбуждения двигателя постоянного тока, от повышения напряжения в системе преобразователь — двигатель, от превышения скорости ЭП, от затянувшегося пуска синхронных двигателей и ряд других. [13]
Тэ [ ъ / Гв — электромагнитная постоянная времени обмотки возбуждения двигателя постоянного тока; LB — индуктивность обмотки возбуждения. [14]
Страницы: 1 2 3
Возбуждение двигателя постоянного тока. Схемы возбуждения
Наличие обмотки возбуждения (ОВ) у двигателя постоянного тока позволяет осуществлять различные схемы подключения. В зависимости от того как включена ОВ, различают двигатели с независимым возбуждением, с самовозбуждением, которое делится на последовательное, параллельное и смешанное.
Двигатель с независимым возбуждением
В ДПТ с независимым возбуждением обмотку возбуждения подключают к отдельному источнику питания (рис. 1). Это может быть связано с различными напряжениями возбуждение Uв и напряжения цепи якоря U. При данной схеме подключения ОВ не имеет электрической связи с обмоткой якоря. Для уменьшения потерь в ОВ, и создания необходимой МДС необходимо уменьшить ток возбуждения, увеличив число витков. Обмотку возбуждения выполняют из малого числа витков, так чтобы ток Iв составлял 2…5% от Iя. Выбор данной схемы возбуждения для двигателя зависит от свойств электропривода.
ДПТ с параллельным возбуждением
По сути, схема подключения ОВ с параллельным возбуждением(рис.2) аналогична схеме с независимым возбуждением. Свойства двигателя при подключении по обеим схемам одинаковы. Плюсом данного вида подключения является то, что отпадает необходимость в отдельном источнике питания.
ДПТ с последовательным возбуждением
При подключении по данной схеме ОВ соединена последовательно цепи якоря (рис.3), при этом ток якоря равен току возбуждения. В связи с этим ОВ изготавливают из провода толстого сечения. Данную схему используют, если требуется обеспечить большой пусковой момент. При уменьшении нагрузки на валу меньше 25% от номинальной, частота вращения резко увеличивается и достигает опасных для двигателя значений. Характеристика ДПТ с последовательным возбуждением “мягкая”.
ДПТ со смешанным возбуждением
ДПТ со смешанным возбуждением (рис.4) имеет две ОВ, одна из которых соединена последовательна, а другая параллельно якорной цепи. При согласном соединении обмоток с увеличением нагрузки на валу растёт магнитный поток, что приводит к уменьшению частоты вращения. При встречном соединении суммарный магнитный поток с увеличением нагрузки уменьшается, что приводит к резкому увеличению частоты вращения. Это приводит двигатель к нестабильному режиму работы, поэтому последовательную обмотку выполняют из малого числа витков, чтобы при увеличении нагрузки магнитный поток снижался незначительно, тем самым стабилизируя работу двигателя.
Рассмотрим более подробно характеристики двигателя параллельного возбуждения, которые определяют его рабочие свойства.
Скоростная и механическая характеристики двигателя определяются равенствами (7) и (9), представленными в статье » «, при U = const и i в = const. При отсутствии дополнительного сопротивления в цепи якоря эти характеристики называются естественными .
Если щетки находятся на геометрической нейтрали, при увеличении I а поток Ф δ несколько уменьшится вследствие действия поперечной реакции якоря . В результате этого скорость n , согласно выражению (7), представленному в статье «Общие сведения о двигателях постоянного тока «, будет стремится возрасти. С другой стороны, падение напряжения R а × I а вызывает уменьшение скорости. Таким образом, возможны три вида скоростной характеристики, изображенные на рис. 1: 1 – при преобладании влияния R а × I а; 2 – при взаимной компенсации влияния R а × I а и уменьшения Ф δ ; 3 – при преобладании влияния уменьшения Ф δ .
Ввиду того что изменение Ф δ относительно мало, механические характеристики n = f (M ) двигателя параллельного возбуждения, определяемые равенством (9), представленным в статье «Общие сведения о двигателях постоянного тока «, при U = const и i в = const совпадают по виду с характеристиками n = f (I а) (рисунок 1). По этой же причине эти характеристики практически прямолинейны.
Характеристики вида 3 (рисунок 1) неприемлемы по условиям устойчивой работы (смотрите статью » «). Поэтому двигатели параллельного возбуждения изготавливаются со слегка падающими характеристиками вида 1 (рисунок 1). В современных высокоиспользованных машинах ввиду довольно сильного насыщения зубцов якоря влияние поперечной реакции якоря может быть настолько большим, что получить характеристику вида 1 (рисунок 1) невозможно. Тогда для получения такой характеристики на полюсах помещают слабую последовательную обмотку возбуждения согласного включения, намагничивающая сила которой составляет до 10% от намагничивающей силы параллельной обмотки возбуждения. При этом уменьшение Ф δ под воздействием поперечной реакции якоря частично или полностью компенсируется. Такую последовательную обмотку возбуждения называют стабилизирующей , а двигатель с такой обмоткой по-прежнему называется двигателем параллельного возбуждения.
Изменение скорости вращения Δn (рисунок 1) при переходе от холостого хода (I а = I а0) к номинальной нагрузке (I а = I ан) у двигателя параллельного возбуждения при работе на естественной характеристике мало и составляет 2 – 8% от n н. Такие слабо падающие характеристики называются жесткими. Двигатели параллельного возбуждения с жесткими характеристиками применяются в установках, в которых требуется, чтобы скорость вращения при изменении нагрузки сохранялась приблизительно постоянной (металлорежущие станки и прочее).
| Рисунок 2. Механические и скоростные характеристики двигателя параллельного возбуждения при разных потоках возбуждения |
Регулирование скорости посредством ослабления магнитного потока
Регулирование скорости посредством ослабления магнитного потока производится обычно с помощью реостата в цепи возбуждения R р.в (смотрите рисунок 1, б в статье » » и рисунок 1 в статье «Пуск двигателей постоянного тока «). При отсутствии добавочного сопротивления в цепи якоря (R ра = 0) и U = const характеристики n = f (I а) и n = f (M ), определяемые равенствами (7) и (9), представленными в статье «Общие сведения о двигателях постоянного тока «, для разных значений R р.в, i в или Ф δ имеют вид, показанный на рисунке 2. Все характеристики n = f (I а) сходятся на оси абсцисс (n = 0) в общей точке при весьма большом токе I а, который, согласно выражению (5), представленному в статье «Общие сведения о двигателях постоянного тока «, равен
I а = U / R а.
Однако механические характеристики n = f (M ) пересекают ось абсцисс в разных точках.
Нижняя характеристика на рисунке 2 соответствует номинальному потоку. Значения n при установившемся режиме работы соответствуют точкам пересечения рассматриваемых характеристик с кривой M ст = f (n ) для рабочей машины, соединенной с двигателем (жирная штриховая линия на рисунке 2).
Точка холостого хода двигателя (M = M 0 , I а = I а0) лежит несколько правее оси ординат на рисунке 2. С увеличением скорости вращения n вследствие увеличения механических потерь M 0 и I а0 также увеличиваются (тонкая штриховая линия на рисунке 2).
Если в этом режиме с помощью приложенного извне момента вращения начать увеличивать скорость вращения n , то E а [смотрите выражение (6) в статье «Общие сведения о двигателях постоянного тока «] будет увеличиваться, а I а и M будут, согласно равенствам (5) и (8), представленным в статье «Общие сведения о двигателях постоянного тока «, уменьшаться. При I а = 0 и M = 0 механические и магнитные потери двигателя покрываются за счет подводимой к валу механической мощности, а при дальнейшем увеличении скорости I а и M изменят знак и двигатель перейдет в генераторный режим работы (участки характеристик на рисунке 2 левее оси ординат).
Двигатели общего применения допускают по условиям коммутации регулирование скорости ослаблением поля в пределах 1: 2. Изготавливаются также двигатели с регулированием скорости таким способом в пределах до 1: 5 или даже 1: 8, но в этом случае для ограничения максимального напряжения между коллекторными пластинами необходимо увеличить воздушный зазор, регулировать поток по отдельным группам полюсов (смотрите статью «Регулирование скорости вращения и устойчивость работы двигателей постоянного тока «) или применить компенсационную обмотку. Стоимость двигателя при этом увеличивается.
Регулирование скорости сопротивлением в цепи якоря, искусственные механическая и скоростная характеристики
Если последовательно в цепь якоря включить добавочное сопротивление R ра (рисунок 3, а ), то вместо выражений (7) и (9), представленных в статье «Общие сведения о двигателях постоянного тока «, получим
| (1) |
| (2) |
Сопротивление R ра может быть регулируемым и должно быть рассчитано на длительную работу. Цепь возбуждения должна быть включена на напряжение сети.
Рисунок 3. Схема регулирования скорости вращения двигателя параллельного возбуждения с помощью сопротивления в цепи якоря (а ) и соответствующие механические и скоростные характеристики (б )
Характеристики n = f (M ) и n = f (I а) для различных значений R ра = const при U = const и i в = const изображены на рисунке 3, б (R ра1 R ра2 R ра3). Верхняя характеристика (R ра = 0) является естественной. Каждая из характеристик пересекает ось абсцисс (n = 0) в точке, для которой
Продолжения этих характеристик под осью абсцисс на рисунке 3 соответствуют торможению двигателя противовключением. В этом случае n E а имеет противоположный знак и складывается с напряжением сети U , вследствие чего
а момент двигателя M действует против направления вращения и является поэтому тормозящим.
Если в режиме холостого хода (I а = I а0) с помощью приложенного извне момента вращения начать увеличивать скорость вращения, то сначала достигается режим I а = 0, а затем I а изменит направление и машина перейдет в режим генератора (участки характеристик на рисунке 3, б слева от оси ординат).
Как видно из рисунка 3, б , при включении R ра характеристики становятся менее жесткими, а при больших значениях R ра – круто падающими, или мягкими.
Если кривая момента сопротивления M ст = f (n ) имеет вид, изображенный на рисунке 3, б жирной штриховой линией, то значения n при установившемся режиме работы для каждого значения R ра определяются точками пересечения соответствующих кривых. Чем больше R ра, тем меньше n и ниже коэффициент полезного действия (к. п. д.).
Регулирование скорости посредством изменения напряжения якоря
Регулирование скорости посредством изменения напряжения якоря может осуществляется с помощью агрегата «генератор – двигатель» (Г – Д), называемого также агрегатом Леонарда (рисунок 4). В этом случае первичный двигатель ПД (переменного тока, внутреннего сгорания и тому подобный) вращает с постоянной скоростью генератор постоянного тока Г . Якорь генератора непосредственно подключен к якорю двигателя постоянного тока Д , который служит приводом рабочей машины РМ . Обмотки возбуждения генератора ОВГ и двигателя ОВД питаются от независимого источника – сети постоянного тока (рисунок 4) или от возбудителей (небольших генераторов постоянного тока) на валу первичного двигателя ПД . Регулирование тока возбуждения генератора i в.г должно производиться практически от нуля (на рисунке 4 с помощью реостата, включенного по потенциометрической схеме). При необходимости реверсирования двигателя можно изменить полярность генератора (на рисунке 4 с помощью переключателя П ).
Рисунок 4. Схема агрегата «генератор – двигатель» для регулирования скорости двигателя независимого возбуждения
Пуск двигателя Д и регулирование его скорости осуществляют следующим образом. При максимальном i в.д и i в.г = 0 производят пуск первичного двигателя ПД . Затем плавно увеличивают i в.г, и при небольшом напряжении генератора U двигатель Д придет во вращение. Регулируя, далее, U в пределах до U = U н, можно получить любые скорости вращения двигателя до n = n н. Дальнейшее увеличение n возможно путем уменьшения i в.д. Для реверсирования двигателя уменьшают i в.г до нуля, переключают ОВГ и снова увеличивают i в.г от значения i в.г = 0.
Когда рабочая машина создает резко пульсирующую нагрузку (например, некоторые прокатные станы) и нежелательно, чтобы пики нагрузки полностью передавались первичному двигателю или в сеть переменного тока, двигатель Д можно снабдить маховиком (агрегат Г – Д – М, или агрегат Леонарда – Ильгнера). В этом случае при понижении n во время пика нагрузки часть этой нагрузки покрывается за счет кинетической энергии маховика. Эффективность действия маховика будет больше при более мягкой характеристике двигателя ПД или Д .
В последнее время все чаще двигатель ПД и генератор Г заменяют полупроводниковым выпрямителем с регулируемым напряжением. В этом случае рассматриваемый агрегат называют также вентильным (тиристорным ) приводом.
Рассмотренные агрегаты используются при необходимости регулирования скорости вращения двигателя с высоким к. п. д. в широких пределах – до 1: 100 и более (крупные металлорежущие станки, прокатные станы и так далее).
Отметим, что изменение U с целью регулирования n по схеме рисунка 1, б , показанного в статье «Общие сведения о генераторах постоянного тока » и рисунка 3, а , не дает желаемых результатов, так как одновременно с изменением напряжения цепи якоря изменяется пропорционально U также ток возбуждения. Так как регулирование U можно производить только от значения U = U н вниз, то вскоре магнитная цепь окажется насыщенной, вследствие чего U и i в будут изменяться пропорционально друг другу. Согласно равенству (7), представленному в статье «Общие сведения о двигателях постоянного тока «), n при этом существенным образом не меняется.
В последнее время все больше распространяется так называемое импульсное регулирование двигателей постоянного тока. При этом цепь якоря двигателя питается от источника постоянного тока с постоянным напряжением через тиристоры, которые периодически, с частотой 1 – 3 кГц включаются и отключаются. Чтобы сгладить при этом кривую тока якоря, на его зажимах подключаются конденсаторы. Напряжение на зажимах якоря в этом случае практически постоянно и пропорционально отношению времени включения тиристоров ко времени продолжительности всего цикла. Таким образом, импульсный метод позволяет регулировать скорость вращения двигателя при его питании от источника с постоянным напряжением в широких пределах без реостата в цепи якоря и практически без дополнительных потерь. Таким же образом, без пускового реостата и без дополнительных потерь, может производиться пуск двигателя.
Импульсный способ регулирования в экономическом отношении весьма выгоден для управления двигателями, работающими в режимах переменной скорости вращения с частыми пусками, например на электрифицированном транспорте.
| Рисунок 5. Рабочие характеристики двигателя параллельного возбуждения P н = 10 кВт, U н = 200 В, n н = 950 об/мин |
Рабочие характеристики
Рабочие характеристики представляют собой зависимости потребляемой мощности P 1 , потребляемого тока I , скорости n , момента M , и к. п. д. η от полезной мощности P 2 при U = const и неизменных положениях регулирующих реостатов. Рабочие характеристики двигателя параллельного возбуждения малой мощности при отсутствии добавочного сопротивления в цепи якоря представлены на рисунке 5.
Одновременно с увеличением мощности на валу P 2 растет и момент на валу M . Поскольку с увеличением P 2 и M скорость n несколько уменьшается, то M ∼ P 2 / n растет несколько быстрее P 2 . Увеличение P 2 и M , естественно, сопровождается увеличением тока двигателя I . Пропорционально I растет также потребляемая из сети мощность P 1 . При холостом ходе (P 2 = 0) к. п. д. η = 0, затем с увеличением P 2 сначала η быстро растет, но при больших нагрузках в связи с большим ростом потерь в цепи якоря η снова начинает уменьшаться.
Двигатели постоянного тока в зависимости от способов их возбуждения, как уже отмечалось, делятся на двигатели с независимым , параллельным (шунтовым), последовательным (сериесным) и смешанным (компаундным) возбуждением.
Двигатели независимого возбуждения , требуют два источника питания (рис.11.9,а). Один из них необходим для питания обмотки якоря (выводы Я1 и Я2 ), а другой — для создания тока в обмотке возбуждения (выводы обмотки Ш1 и Ш2 ). Дополнительное сопротивление Rд в цепи обмотки якоря необходимо для уменьшения пускового тока двигателя в момент его включения.
С независимым возбуждением выполняются в основном мощные электрические двигатели с целью более удобного и экономичного регулирования тока возбуждения. Сечение провода обмотки возбуждения определяется в зависимости от напряжения ее источника питания. Особенностью этих машин является независимость тока возбуждения, а соответственно и основного магнитного потока, от нагрузки на валу двигателя.
Двигатели с независимым возбуждением по своим характеристикам практически совпадают с двигателями параллельного возбуждения.
Двигатели параллельного возбуждения включаются в соответствии со схемой, показанной на рис.11.9,б. Зажимы Я1 и Я2 относятся к обмотке якоря, а зажимы Ш1 иШ2 — к обмотке возбуждения (к шунтовой обмотке). Переменные сопротивления Rд и Rв предназначены соответственно для изменения тока в обмотке якоря и в обмотке возбуждения. Обмотка возбуждения этого двигателя выполняется из большого количества витков медного провода сравнительно малого сечения и имеет значительное сопротивление. Это позволяет подключать ее на полное напряжение сети, указанное в паспортных данных.
Особенностью двигателей этого типа является то, что при их работе запрещается отсоединять обмотку возбуждения от якорной цепи . В противном случае при размыкании обмотки возбуждения в ней появится недопустимое значение ЭДС, которое может привести к выходу из строя двигателя и к поражению обслуживающего персонала. По той же причине нельзя размыкать обмотку возбуждения и при выключении двигателя, когда его вращение еще не прекратилось.
С увеличением частоты вращения добавочное (дополнительное) сопротивление Rд в цепи якоря следует уменьшать, а при достижении установившейся частоты вращения – вывести полностью.
Рис.11.9. Виды возбуждения машин постоянного тока,
а — независимого возбуждения, б — параллельного возбуждения,
в — последовательного возбуждения, г — смешанного возбуждения.
ОВШ — обмотка возбуждения шунтовая, ОВС — обмотка возбуждения сериесная,» ОВН — обмотка независимого возбуждения, Rд -дополнительное сопротивление в цепи обмотки якоря, Rв- дополнительное сопротивление в цепи обмотки возбуждения.
Отсутствие дополнительного сопротивления в обмотке якоря в момент пуска двигателя может привести к появлению большого пускового тока, превышающего номинальный ток якоря в 10…40 раз .
Важным свойством двигателя параллельного возбуждения служит практически постоянная его частота вращения при изменении нагрузки на валу якоря. Так при изменении нагрузки от холостого хода до номинального значения частота вращения уменьшается всего лишь на (2.. 8)% .
Второй особенностью этих двигателей служит экономичное регулирование частоты вращения, при котором отношение наибольшей скорости к наименьшей может составлять 2:1 , а при специальном исполнении двигателя — 6:1 . Минимальная частота вращения ограничивается насыщением магнитной цепи, которое не позволяет уже увеличивать магнитный поток машины, а верхний предел частоты вращения определяется устойчивостью машины — при значительном ослаблении магнитного потока двигатель может пойти «вразнос» .
Двигатели последовательного возбуждения (сериесные) включаются по схеме, (рис.11.9, в). Выводы С1 и С2 соответствуют сериесной (последовательной) обмотке возбуждения. Она выполняется из сравнительно малого числа витков в основном медного провода большого сечения. Обмотка возбуждения соединяется последовательно с обмоткой якоря . Дополнительное сопротивление Rд в цепи обмоток якоря и возбуждения позволяет уменьшить пусковой ток и производить регулирование частоты вращения двигателя. В момент включения двигателя оно должно иметь такую величину, при которой пусковой ток будет составлять (1,5…2,5)Iн . После достижения двигателем установившейся частоты вращения дополнительное сопротивление Rд выводится, то есть устанавливается равным нулю.
Эти двигатели при пуске развивают большие пусковые моменты вращения и должны запускаться при нагрузке не менее 25% ее номинального значения. Включение двигателя при меньшей мощности на его валу и тем более в режиме холостого хода не допускается . В противном случае двигатель может развить недопустимо большие обороты, что вызовет выход его из строя . Двигатели этого типа широко применяются в транспортных и подъемных механизмах, в которых необходимо изменять частоту вращения в широких пределах.
Двигатели смешанного возбуждения (компаундные), занимают промежуточное положение между двигателями параллельного и последовательного возбуждения (рис.11.9, г). Большая принадлежность их к тому или другому виду зависит от соотношения частей основного потока возбуждения, создаваемых параллельной или последовательной обмотками возбуждения. В момент включения двигателя для уменьшения пускового тока в цепь обмотки якоря включается дополнительное сопротивление Rд . Этот двигатель обладает хорошими тяговыми характеристиками и может работать в режиме холостого хода.
Прямое (безреостатаное) включение двигателей постоянного тока всех видов возбуждения допускается мощностью не более одного киловатта.
Обозначение машин постоянного тока
В настоящее время наиболее широкое распространение получили машины постоянного тока общего назначения серии 2П и наиболее новой серии 4П. Кроме этих серий выпускаются двигатели для крановых, экскаваторных, металлургических и других приводов серии Д. Изготавливаются двигатели и специализированных серий .
Двигатели серий 2П и 4П подразделяются по оси вращения, как это принято для асинхронных двигателей переменного тока серии4А . Машины серии2П имеют 11 габаритов, отличающихся по высоте вращения оси от 90 до 315 мм. Диапазон мощностей машин этой серии составляет от 0,13 до 200 кВт для электрических двигателей и от 0,37 до 180 кВт для генераторов. Двигатели серий 2П и 4П рассчитываются на напряжение 110, 220, 340 и 440 В. Их номинальные частоты вращения составляют 750, 1000, 1500,2200 и 3000 об/мин.
Каждый из 11 габаритов машин серии 2П имеет станины двух длин (М и L ).
Электрические машины серии 4П имеют лучшие некоторые технико — экономические показатели по сравнению с серией 2П . трудоемкость изготовления серии 4П по сравнению с 2П снижена в 2,5…3 раза. При этом расход меди снижается на 25…30 %. По ряду конструктивных особенностей, в том числе по способу охлаждения, по защите от атмосферных воздействий, по использованию отдельных деталей и узлов машины серии 4П унифицированы с асинхронными двигателями серии 4А иАИ .
Обозначение машин постоянного тока (как генераторов, так и двигателей) представляется следующим образом:
ПХ1Х2ХЗХ4 ,
где 2П — серия машины постоянного тока;
XI — исполнение по типу защиты: Н — защищенное с самовентиляцией, Ф — защищенное с независимой вентиляцией, Б — закрытое с естественным охлаждением, О — закрытое с обдувом от постороннего вентилятора;
Х2 — высота оси вращения (двухзначное или трехзначное число) в мм;
ХЗ — условная длина статора: М — первая, L — вторая, Г — с тахогенератором;
В качестве примера можно привести обозначение двигателя 2ПН112МГУ — двигатель постоянного тока серии 2П , защищенного исполнения с самовентиляцией Н ,112 высота оси вращения в мм, первый размер статораМ , укомплектован тахогенератором Г , используется для умеренного климатаУ .
По мощностям электрические машины постоянного тока условно могут быть подразделены на следующие группы :
Микромашины …………………………меньше 100 Вт,
Мелкие машины ………………………от 100 до 1000 Вт,
Машины малой мощности…………..от 1 до 10 кВт,
Машины средней мощности………..от 10 до 100 кВт,
Крупные машины……………………..от 100 до 1000 кВт,
Машины большой мощность……….более 1000 кВт.
По номинальным напряжениям электрические машины подразделяются условно следующим образом:
Низкого напряжения…………….меньше 100 В,
Среднего напряжения ………….от 100 до 1000 В,
Высокого напряжения……………выше 1000В.
По частоте вращения машины постоянного тока могут быть представлены как:
Тихоходные…………….менее 250 об/мин.,
Средней скорости………от 250 до 1000 об/мин.,
Быстроходные………….от 1000 до 3000 об/мин.
Сверхбыстроходные…..выше 3000 об/мин.
Задание и методика выполнения работы.
1.Изучить устройство и назначение отдельных частей электрических машин постоянного тока.
2.Определить выводы машины постоянного тока, относящиеся к обмотке якоря и к обмотке возбуждения.
Выводы, соответствующие той или иной обмотке, могут быть определены мегомметром, омметром или с помощью электрической лампочки. При использовании мегомметра один его конец присоединяется к одному из выводов обмоток, а другим поочередно касаются к остальным. Измеренное сопротивление, равное нулю, укажет на соответствие двух выводов одной обмотки.
3.Распознать по выводам обмотку якоря и обмотку возбуждения. Определить вид обмотки возбуждения (параллельного возбуждения или последовательного).
Этот опыт можно осуществить с помощью электрической лампочки, подключаемой последовательно с обмотками Постоянное напряжение следует подавать плавно, постепенно повышая его до указанного номинального значения в паспорте машины.
С учетом малого сопротивления якорной обмотки и обмотки последовательного возбуждения лампочка загорится ярко, а их сопротивления, измеренные мегомметром (или омметром) будут практически равны нулю.
Лампочка, соединенная последовательно с параллельной обмоткой возбуждения, будет гореть тускло. Значение сопротивления параллельной обмоткой возбуждения должно находиться в пределах 0,3…0,5 кОм .
Выводы якорной обмотки можно распознать путем присоединения одного конца мегомметра к щеткам, касаясь при этом другим его концом к выводам обмоток на щитке электрической машины.
Выводы обмоток электрической машины следует обозначить на изображенной в отчете условной этикетке выводов.
Измерить сопротивления обмоток и сопротивление изоляции. Сопротивление обмоток можно измерить по схеме амперметра и вольтметра. Сопротивление изоляции между обмотками и обмотками относительно корпуса проверяется мегомметром, рассчитанным на напряжение 1 кВ. Сопротивление изоляции между обмоткой якоря и обмоткой возбуждения и между ними и корпусом должно быть не ниже 0,5 МОм . Данные замеров отобразить в отчете.
Изобразить условно в поперечном разрезе главные полюсы с обмоткой возбуждения и якорь с витками обмотки, находящимися под полюсами (подобно рис.11.10). Самостоятельно принять направление тока в обмотках возбуждения и якоря. Указать при этих условиях направление вращения двигателя.
Рис. 11.10. Двухполюсная машина постоянного тока:
1 — станина; 2 -якорь; 3 — главные полюсы; 4 — обмотка возбуждения; 5 — полюсные наконечники; 6 — обмотка якоря; 7 — коллектор; Ф — основной магнитный поток; F — сила, действующая на проводники обмотки якоря.
Контрольные вопросы и задания для самостоятельной подготовки
1: Объяснить устройство и принцип действия двигателя и генератора постоянного тока.
2. Пояснить назначение коллектора машин постоянного тока.
3.Дать понятие полюсного деления и привести выражение для его определения.
4.Назвать основные виды обмоток, применяемых в машинах постоянного тока, и знать способы их выполнения.
5.Указать основные достоинства двигателей параллельного возбуждения.
6.Каковы конструктивные особенности обмотки параллельного возбуждения по сравнению с обмоткой последовательного возбуждения?
7.В чем особенность пуска двигателей постоянного тока последовательного возбуждения?
8.Сколько параллельных ветвей имеют простая волновая и простая петлевая обмотки машин постоянного тока?
9.Как обозначаются машины постоянного тока? Привести пример обозначения.
10.Какой величины допускается сопротивление изоляции между обмотками машин постоянного тока и между обмотками и корпусом?
11.Какой величины может достигнуть ток в момент пуска двигателя при отсутствии дополнительного сопротивления в цепи обмотки якоря?
12.Какой величины допускается пусковой ток двигателя?
13.В каких случаях допускается пуск двигателя постоянного тока без дополнительного сопротивления в цепи обмотки якоря?
14.За счет чего можно изменить ЭДС генератора независимого возбуждения?
15.Каково назначение дополнительных полюсов машины постоянного тока?
16.При каких нагрузках допускается включение двигателя последовательного возбуждения?
17.Чем определяется величина основного магнитного потока?
18.Написать выражения ЭДС генератора и момента вращения двигателя. Дать понятие входящих в них составляющих.
ЛАБОРАТОРНАЯ РАБОТА 12.
Как и в случае генератора, обмотки индуктора и якоря двигателя могут быть соединены либо последовательно (рис.339), либо параллельно (рис.340). В первом случае двигатель называют двигателем с последовательным возбуждением (или сериесным двигателем), во втором – двигателем с параллельным возбуждением (или шунтовым двигателем). Применяются также двигатели со смешанным возбуждением (компаунд-двигатели), в которых часть обмоток индуктора соединена с якорем последовательно, а часть параллельно. Каждый из этих типов двигателей имеет свои особенности, делающие его применение целесообразным в одних случаях и нецелесообразным в других.
1. Двигатели с параллельным возбуждением. Схема включения в сеть двигателей этого типа показана на рис. 361. Так как здесь цепи якоря и индуктора не зависят друг от друга, то ток в них можно регулировать независимо при помощи отдельных реостатов, включенных в эти цепи. Реостат , включенный в цепь якоря, называют пусковым, а реостат , включенный в цепь индуктора, – регулировочным. При пуске в ход двигателя с параллельным возбуждением пусковой реостат должен быть обязательно полностью включен; по мере того как двигатель набирает частоту вращения, сопротивление реостата постепенно уменьшают и при достижении нормальной частоты вращения этот реостат выводится из цепи полностью. Двигатели с параллельным возбуждением, особенно значительной мощности, ни в коем случае нельзя включать без пускового реостата. Точно так же при выключении двигателя следует сначала постепенно ввести реостат и лишь после этого выключить рубильник, соединяющий двигатель с сетью.
Рис. 361. Схема включения двигателя с параллельным возбуждением. Латунная дуга 1, по которой движется рычаг пускового реостата, через зажим 2 присоединена к концу регулировочного реостата, а через зажим 3 – к пусковому реостату. Это делается для того, чтобы при переводе пускового реостата на холостой контакт 4 и выключении тока цепь возбуждения не разрывалась
Нетрудно понять соображения, которыми вызваны эти правила включения и выключения двигателей. Мы видели (см. формулу (172.1)), что ток в якоре
,
где – напряжение сети, а — э. д. с., индуцированная в обмотках якоря. В первый момент, когда двигатель еще не успел раскрутиться и набрать достаточную частоту вращения, э. д. с. очень мала и ток через якорь приближенно равен
Сопротивление якоря обычно очень мало. Оно рассчитывается так, чтобы падение напряжения на якоре не превышало 5-10 % от напряжения сети, на которое рассчитан двигатель. Поэтому при отсутствии пускового реостата ток в первые секунды мог бы в 10-20 раз превысить нормальный ток, на который рассчитан двигатель при полной нагрузке, а это для него очень опасно. При введенном же пусковом реостате с сопротивлением пусковой ток через якорь
. (173.1)
Сопротивление пускового реостата подбирают так, чтобы пусковой ток превышал нормальный не больше чем в 1,5-2 раза.
Поясним сказанное числовым примером. Положим, что мы имеем двигатель мощности 1,2 кВт, рассчитанный на напряжение 120 В и имеющий сопротивление якоря . Ток через якорь при полной нагрузке
.
Если бы мы включили этот двигатель в сеть без пускового реостата, то в первые секунды пусковой ток через якорь имел бы значение
,
в 10 раз превышающее нормальный рабочий ток в якоре. Если же мы хотим, чтобы пусковой ток превышал нормальный не больше, чем в 2 раза, т. е. был равен 20 А, то мы должны подобрать пусковое сопротивление таким, чтобы имело место равенство
,
откуда Ом.
Ясно также, что для шунтового двигателя очень опасна внезапная его остановка без выключения, например вследствие резкого возрастания нагрузки, так как при этом э. д. с. падает до нуля и ток в якоре возрастает настолько, что избыток выделяемого в нем джоулева тепла может привести к расплавлению изоляции или даже самих проводов обмотки (двигатель «перегорает»).
Регулировочный реостат , включенный в цепь индуктора, служит для того, чтобы изменять частоту вращения двигателя. Увеличивая или уменьшая сопротивление цепи индуктора с помощью этого реостата, мы изменяем ток в цепи индуктора, а тем самым и магнитное поле, в котором вращается якорь. Мы видели выше, что при заданной нагрузке двигателя ток в нем автоматически устанавливается такой, чтобы возникающий вращающий момент уравновешивал тормозящий вращающий момент, создаваемый нагрузкой двигателя. Это осуществляется благодаря тому, что индуцированная э. д. с. достигает соответствующего значения. Но индуцированная э. д. с. определяется, с одной стороны, магнитной индукцией, а с другой, – частотой вращения якоря.
Чем больше магнитный поток индуктора, тем меньше должна быть частота вращения двигателя, чтобы получить определенное значение э. д. с., и, наоборот, чем слабее магнитный поток, тем больше должна быть частота вращения. Поэтому, для того чтобы при заданной нагрузке увеличить частоту вращения шунтового двигателя, нужно ослабить магнитный поток в индукторе, т. е. ввести большее сопротивление в цепь индуктора при помощи регулировочного реостата. Напротив, чтобы уменьшить частоту вращения шунтового двигателя, нужно увеличить магнитный поток в индукторе, т. е. уменьшить сопротивление в цепи индуктора, выводя регулировочный реостат.
С помощью регулировочного реостата можно при нормальном напряжении и отсутствии нагрузки установить нормальную частоту вращения двигателя. При возрастании нагрузки ток в якоре должен возрастать, а индуцированная в нем э. д. с. – уменьшаться. Это происходит вследствие некоторого уменьшения частоты вращения якоря. Однако уменьшение частоты вращения, обусловленное возрастанием нагрузки от нуля до нормальной мощности двигателя, обычно очень незначительно и не превышает 5-10 % от нормальной частоты вращения двигателя. Это обусловлено главным образом тем, что в двигателях с параллельным возбуждением ток в индукторе не изменяется при изменении тока в якоре. Если бы при изменениях нагрузки мы хотели поддерживать прежнюю частоту вращения, то это можно было бы осуществить, несколько изменяя с помощью регулировочного реостата ток в цепи индуктора.
Таким образом, с эксплуатационной точки зрения двигатели постоянного тока с параллельным возбуждением (шунтовые двигатели) характеризуются следующими двумя свойствами: а) частота их вращения при изменении нагрузки остается почти постоянной; б) частоту их вращения можно в широких пределах изменять с помощью регулировочного реостата. Поэтому такие двигатели довольно широко применяются в промышленности там, где обе указанные их особенности имеют значение, например для приведения в действие токарных и других станков, частота вращения которых не должна сильно зависеть от нагрузки.
173.1. На рис. 362 показана схема шунтового двигателя с так называемым комбинированным пуско-регулировочным реостатом. Разберитесь в этой схеме и объясните, какую роль играют отдельные части этого реостата.
Рис. 362. К упражнению 173.1
173.2. Нужно пустить в ход шунтовый двигатель. Для этого даны два реостата: один из толстой проволоки с малым сопротивлением, другой из тонкой проволоки с большим сопротивлением. Какой из этих реостатов следует включить как пусковой и какой как регулировочный? Почему?
2. Двигатели с последовательным возбуждением. Схема включения в сеть этих двигателей показана на рис. 363. Здесь ток якоря является в то же время и током индуктора, и потому пусковой реостат изменяет и ток в якоре, и ток в индукторе. При холостом ходе или очень малых нагрузках ток в якоре, как мы знаем, должен быть очень мал, т. е. индуцированная э. д. с. должна быть почти равна напряжению сети. Но при очень малом токе через якорь и индуктор слабо и поле индуктора. Поэтому при малой нагрузке необходимая э. д. с. может быть получена только за счет очень большой частоты вращения двигателя. Вследствие этого при очень малых токах (малой нагрузке) частота вращения двигателя с последовательным возбуждением становится настолько большой, что это может стать опасным с точки зрения механической прочности двигателя.
Рис. 363. Схема включения двигателя с последовательным возбуждением
Говорят, что двигатель идет «вразнос». Это недопустимо, и поэтому двигатели с последовательным возбуждением нельзя пускать в ход без нагрузки или с малой нагрузкой (меньшей 20-25 % от нормальной мощности двигателя). По этой же причине не рекомендуется соединять эти двигатели со станками или другими машинами ременными или канатными передачами, так как обрыв или случайный сброс ремня приведет к «разносу» двигателя. Таким образом, в двигателях с последовательным возбуждением при возрастании нагрузки увеличиваются ток в якоре и магнитное поле индуктора; поэтому частота вращения двигателя резко падает, а развиваемый им вращающий момент резко возрастает.
Эти свойства двигателей с последовательным возбуждением делают их наиболее удобными для применения на транспорте (трамваи, троллейбусы, электропоезда) и в подъемных устройствах (кранах), так как в этих случаях необходимо иметь в момент пуска при очень большой нагрузке большие вращающие моменты при малых частотах вращения, а при меньших нагрузках (на нормальном ходу) меньшие моменты и большие частоты.
Регулирование частоты вращения двигателя с последовательным возбуждением производится обычно регулировочным реостатом, включенным, параллельно обмоткам индуктора (рис. 364). Чем меньше сопротивление этого реостата, тем большая часть тока якоря ответвляется в него и тем меньший ток идет через обмотки индуктора. Но при уменьшении тока в индукторе частота вращения двигателя возрастает, а при его увеличении падает. Поэтому, в отличие от того, что имело место для шунтового двигателя, для того чтобы увеличить частоту вращения сериесного двигателя, нужно уменьшить сопротивление цепи индуктора, выводя регулировочный реостат. Для того чтобы уменьшить частоту вращения сериесного двигателя, нужно увеличить сопротивление цепи индуктора, вводя регулировочный реостат.
Рис. 364. Схема включения реостата для регулирования частоты вращения сериесного двигателя
173.3. Объясните, почему сериесный двигатель нельзя пускать вхолостую или с малой нагрузкой, а шунтовый можно.
Таблица 8. Преимущества, недостатки и области применения двигателей различных типов
|
Тип двигателя |
Основные преимущества |
Основные недостатки |
Область применения |
|
Трехфазный двигатель переменного тока с вращающимся полем |
1. Слабая зависимость частоты вращения от нагрузки 2. Простота и экономичность конструкции 3. Применение трехфазного тока |
1. Трудность регулирования частоты вращения 2. Малый вращающий момент при пуске |
Станки и машины, требующие постоянства частоты вращения при изменениях нагрузки, но не нуждающиеся в регулировке частоты вращения |
|
Двигатель постоянного тока с параллельным возбуждением (шунтовый) |
1. Постоянство частоты вращения при изменениях нагрузки 2. Возможность регулирования частоты вращения |
Малый вращающий момент при пуске |
Станки и машины, требующие постоянства частоты вращения при изменениях нагрузки и возможности регулировать частоту вращения |
|
Двигатель постоянного тока с последовательным возбуждением (сериесный) |
Большой вращающий момент при пуске |
Сильная зависимость частоты вращения от нагрузки |
Тяговые двигатели в трамваях и электропоездах, крановые двигатели |
В заключение сопоставим в виде табл. 8 основные преимущества и недостатки различных типов электродвигателей, рассмотренных нами в этой главе, и области их применения.
Обмотка возбуждения подключается к независимому источнику. Характеристики двигателя получаются такие же, как у двигателя с постоянными магнитами. Скорость вращения регулируется сопротивлением в цепи якоря. Регулируют ее и реостатом (регулировочным сопротивлением) в цепи обмотки возбуждения, но при чрезмерном уменьшении его величины или при обрыве ток якоря возрастает до опасных значений. Двигатели с независимым возбуждением нельзя запускать на холостом ходу или с малой нагрузкой на валу. Скорость вращения резко увеличится, и двигатель будет поврежден.
Схема независимого возбуждения
Остальные схемы называют схемами с самовозбуждением.
Параллельное возбуждение
Обмотки ротора и возбуждения подключаются параллельно к одному источнику питания. При таком включении ток через обмотку возбуждения в несколько раз меньше, чем через ротор. Характеристики электродвигателей получаются жесткими, позволяющие использовать их для привода станков, вентиляторов.
Регулировка скорости вращения обеспечивается включением реостатов в цепь ротора или последовательно с обмоткой возбуждения.
Схема параллельного возбуждения
Последовательное возбуждение
Обмотка возбуждения включается последовательно с якорной, по ним течет один и тот же ток. Скорость такого двигателя зависит от его нагрузки, его нельзя включать на холостом ходу. Но он обладает хорошими пусковыми характеристиками, поэтому схема с последовательным возбуждением применяется на электрифицированном транспорте.
Схема последовательного возбуждения
Смешанное возбуждение
При этой схеме используются две обмотки возбуждения, расположенные попарно на каждом из полюсов электродвигателя. Их можно подключить так, чтобы потоки их либо складывались, либо вычитались. В результате двигатель может иметь характеристики как у схемы последовательного или параллельного возбуждения.
Схема смешанного возбуждения
Для изменения направления вращения изменяют полярность одной из обмоток возбуждения. Для управления пуском электродвигателя и скоростью его вращения применяют ступенчатое переключение сопротивлений
33. Характеристика дпт с независимым возбуждением.
Двигатель постоянного тока независимого возбуждения (ДПТ НВ) В этом двигателе (рисунок 1) обмотка возбуждения подключена к отдельному источнику питания. В цепь обмотки возбуждения включен регулировочный реостат r рег, а в цепь якоря — добавочный (пусковой) реостат R п. Характерная особенность ДПТ НВ — его ток возбуждения I в не зависит от тока якоря I я так как питание обмотки возбуждения независимое.
Схема двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Рисунок 1
Механическая характеристика двигателя постоянного тока независимого возбуждения (дпт нв)
Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид
где: n 0 — частота вращения вала двигателя при холостом ходе. Δn — изменение частоты вращения двигателя под действием механической нагрузки.
Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода n 0 (рис 13.13 а), при этом изменение частоты вращения двигателя Δn , обусловленное изменением его механической нагрузки, пропорционально сопротивлению цепи якоря R а =∑R + R доб. Поэтому при наименьшем сопротивлении цепи якоря R а = ∑R, когда R доб = 0 , соответствует наименьший перепад частоты вращения Δn . При этом механическая характеристика становится жесткой (график 1).
Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и возбуждения и при отсутствии добавочных сопротивлений в цепи якоря, называют естественными (график 7).
Если же хотя бы один из перечисленных параметров двигателя изменен (напряжение на обмотках якоря или возбуждения отличаются от номинальных значений, или же изменено сопротивление в цепи якоря введением R доб ), то механические характеристики называют искусственными .
Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления R доб, называют также реостатными (графики 7, 2 и 3).
При оценке регулировочных свойств двигателей постоянного тока наибольшее значение имеют механические характеристики n = f(M) . При неизменном моменте нагрузки на валу двигателя с увеличением сопротивления резистора R доб частота вращения уменьшается. Сопротивления резистора R доб для получения искусственной механической характеристики, соответствующей требуемой частоте вращения n при заданной нагрузке (обычно номинальной) для двигателей независимого возбуждения:
где U — напряжение питания цепи якоря двигателя, В; I я — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n 0 — частота вращения холостого хода, об/мин.
Частота вращения холостого хода n 0 представляет собой пограничную частоту вращения, при превышении которой двигатель переходит в генераторный режим. Эта частота вращения превышает номинальную n ном на столько, на сколько номинальное напряжение U ном подводимое к цепи якоря, превышает ЭДС якоря Е я ном при номинальной нагрузки двигателя.
На форму механических характеристик двигателя влияет величина основного магнитного потока возбуждения Ф . При уменьшении Ф (при возрастании сопротивления резистора r peг) увеличивается частота вращения холостого хода двигателя n 0 и перепад частоты вращения Δn. Это приводит к значительному изменению жесткости механической характеристики двигателя (рис. 13.13, б). Если же изменять напряжение на обмотке якоря U (при неизменных R доб и R рег), то меняется n 0 , a Δn остается неизменным [см. (13.10)]. В итоге механические характеристики смещаются вдоль оси ординат, оставаясь параллельными друг другу (рис. 13.13, в). Это создает наиболее благоприятные условия при регулировании частоты вращения двигателей путем изменения напряжения U , подводимого к цепи якоря. Такой метод регулирования частоты вращения получил наибольшее распространение еще и благодаря разработке и широкому применению регулируемых тиристорных преобразователей напряжения.
Типы двигателей постоянного тока и их применение
Двигатель постоянного тока (двигатель постоянного тока) находит множество применений в современной области техники и технологий. От электробритв до автомобилей — двигатели постоянного тока повсюду. Чтобы удовлетворить этот широкий спектр приложений, используются различные типы двигателей постоянного тока в зависимости от области применения.
Типы двигателей постоянного тока включают:
Теперь мы подробно обсудим различные типы двигателей постоянного тока. Если вы хотите продолжить изучение двигателей постоянного тока, ознакомьтесь с нашим списком основных вопросов по электрике.
Двигатель постоянного тока с раздельным возбуждением
Как следует из названия, в случае двигателя постоянного тока с раздельным возбуждением питание подается отдельно на обмотки возбуждения и якоря. Основным отличительным фактом этих типов двигателей постоянного тока является то, что ток якоря не течет через обмотки возбуждения, поскольку обмотка возбуждения питается от отдельного внешнего источника постоянного тока, как показано на рисунке рядом.
Из уравнения крутящего момента двигателя постоянного тока мы знаем T g = K a φ I a Таким образом, крутящий момент в этом случае можно изменять, изменяя поток поля φ, независимо от тока якоря I a .
Двигатель постоянного тока с постоянным магнитом
Двигатель постоянного тока с постоянным магнитом (также известный как двигатель с постоянным магнитным током) состоит из обмотки якоря, как и в случае обычного двигателя, но не обязательно содержит обмотки возбуждения. Конструкция этих типов двигателей постоянного тока такова, что радиально намагниченные постоянные магниты устанавливаются на внутренней периферии сердечника статора для создания магнитного поля.
Ротор, с другой стороны, имеет обычный якорь постоянного тока с сегментами коммутатора и щетками.Схематическое изображение двигателя постоянного тока с постоянными магнитами приведено ниже.
Уравнение крутящего момента двигателя постоянного тока предлагает
Здесь φ всегда постоянный, поскольку постоянные магниты с необходимой плотностью потока выбираются во время строительства и не могут быть изменены там после.
Для двигателя постоянного тока с постоянными магнитами
Где, K a1 = K a .φ, что является другой постоянной. В этом случае крутящий момент двигателя постоянного тока можно изменить только путем управления питанием якоря.
Электродвигатель постоянного тока с самовозбуждением
В случае электродвигателя постоянного тока с самовозбуждением обмотка возбуждения подключается либо последовательно, либо параллельно, либо частично последовательно, частично параллельно обмотке якоря. Исходя из этого, двигатели постоянного тока с самовозбуждением можно классифицировать как:
- Двигатель постоянного тока с параллельной обмоткой
- Двигатель постоянного тока с последовательной обмоткой
- Двигатель постоянного тока с комбинированной обмоткой
Давайте теперь подробно рассмотрим эти типы самовозбуждающегося двигателя постоянного тока.
Двигатель постоянного тока с шунтовой обмоткой
В случае двигателя постоянного тока с шунтовой обмоткой или, более конкретно, двигателя постоянного тока с шунтовой обмоткой и самовозбуждением, обмотки возбуждения подвергаются воздействию всего напряжения на клеммах, поскольку они подключены параллельно обмотке якоря, как показано на рисунке ниже.
Чтобы понять характеристики этих типов двигателей постоянного тока, давайте рассмотрим основное уравнение напряжения, заданное следующим образом:
[Где, E, E b , I a , R a — напряжение питания, обратная ЭДС , ток якоря и сопротивление якоря соответственно]
[так как обратная ЭДС увеличивается с потоком φ и угловой скоростью ωω]
Теперь подставляя E b из уравнения (2) в уравнение (1), получаем,
Уравнение крутящего момента двигатель постоянного тока напоминает,
Это похоже на уравнение прямой линии, и мы можем графически представить характеристику скорости крутящего момента самовозбуждающегося двигателя постоянного тока с параллельной обмоткой как
Двигатель постоянного тока с параллельной обмоткой является двигателем с постоянной скоростью, так как скорость здесь не меняется с изменением механической нагрузки на выходе.
Двигатель постоянного тока серииВ случае последовательного двигателя постоянного тока с самовозбуждением или просто двигателя постоянного тока серии весь ток якоря протекает через обмотку возбуждения, поскольку она последовательно соединена с обмоткой якоря. Для ясного понимания ниже схематически изображен самовозбуждающийся двигатель постоянного тока с последовательным возбуждением.
Теперь, чтобы определить характеристику крутящего момента и скорости для этих типов двигателей постоянного тока, давайте перейдем к уравнению скорости крутящего момента.
Из принципиальной схемы видно, что уравнение напряжения изменяется на
Где остается противоэдс E b = k a φω
Пренебрегая насыщением, мы получаем
[поскольку ток возбуждения = ток якоря]
Из уравнений (5) и (6)
Из этого уравнения мы получаем характеристику крутящего момента и скорости как
В двигателе постоянного тока с последовательной обмоткой скорость изменяется в зависимости от нагрузки.И с точки зрения эксплуатации, это его главное отличие от двигателя постоянного тока с шунтовой обмоткой.
Электродвигатель постоянного тока с комбинированной обмоткой
Составная характеристика возбуждения в электродвигателе постоянного тока может быть получена путем комбинирования рабочих характеристик как электродвигателя постоянного тока с параллельным возбуждением, так и электродвигателя постоянного тока с последовательным возбуждением. Электродвигатель постоянного тока с составной обмоткой или просто электродвигатель постоянного тока с составной обмоткой по существу содержит обмотку возбуждения, подключенную как последовательно, так и параллельно обмотке якоря, как показано на рисунке ниже:
Возбуждение электродвигателя постоянного тока с составной обмоткой может быть следующим: два вида в зависимости от характера компаундирования.
Кумулятивный составной двигатель постоянного тока
Когда поток шунтирующего поля способствует потоку основного поля, создаваемого основным полем, последовательно подключенным к обмотке якоря, это называется кумулятивным составным двигателем постоянного тока.
Дифференциальный составной двигатель постоянного тока
В случае дифференциального составного двигателя постоянного тока с самовозбуждением, то есть дифференциального составного двигателя постоянного тока, расположение шунтирующей и последовательной обмоток таково, что поток поля, создаваемый шунтирующей обмоткой поля, уменьшает влияние магнитного потока на обмотка возбуждения основной серии.
Чистый поток, полученный в этом случае, меньше, чем исходный поток, и, следовательно, не находит большого практического применения.
Компаундная характеристика самовозбуждающегося двигателя постоянного тока показана на рисунке ниже.
И накопительный составной, и дифференциальный составной двигатель постоянного тока могут быть коротко- или длинно-шунтирующего типа, в зависимости от типа компоновки.
Короткий шунтирующий двигатель постоянного тока
Если шунтирующая обмотка возбуждения параллельна только обмотке якоря, а не последовательной обмотке возбуждения, то это называется коротким шунтирующим двигателем постоянного тока или, более конкретно, коротким шунтирующим двигателем постоянного тока с составной обмоткой.
Принципиальная схема двигателя постоянного тока с коротким шунтом показана на схеме ниже.
Длинный шунтирующий двигатель постоянного тока
Если шунтирующая обмотка возбуждения параллельна как обмотке якоря, так и последовательной обмотке возбуждения, то он известен как длинный шунтирующий двигатель постоянного тока с комбинированной обмоткой или просто длинный шунтирующий двигатель постоянного тока.
Принципиальная схема двигателя постоянного тока с длинным шунтом показана на схеме ниже.
Метод возбуждения двигателя постоянного тока — Знание
Двигатель постоянного тока — это вращающаяся электрическая машина, которая может преобразовывать электрическую энергию постоянного тока в механическую энергию (двигатель постоянного тока) или преобразовывать механическую энергию в электрическую энергию постоянного тока (генератор постоянного тока).Это двигатель, который может преобразовывать электрическую энергию постоянного тока в механическую. Когда он работает как двигатель, это двигатель постоянного тока, который преобразует электрическую энергию в механическую. Когда он работает как генератор, это генератор постоянного тока, который преобразует механическую энергию в электрическую.
Метод возбуждения относится к способу создания магнитного поля во вращающейся электрической машине. Способы возбуждения двигателей постоянного тока Shandong делятся на четыре типа:
Двигатель постоянного тока с раздельным возбуждением
Между обмоткой возбуждения и обмоткой якоря нет связи.Двигатель постоянного тока, питаемый от других источников питания постоянного тока для обмотки возбуждения, называется двигателем постоянного тока с независимым возбуждением. Двигатель постоянного тока с постоянным магнитом также можно рассматривать как двигатель постоянного тока с независимым возбуждением или с самовозбуждением, который обычно называется напрямую. Метод возбуждения — постоянный магнит.
Двигатель постоянного тока с параллельным возбуждением
Обмотка возбуждения двигателя постоянного тока с параллельным возбуждением подключена параллельно обмотке якоря. В качестве шунтирующего генератора напряжение на клеммах самого двигателя подает питание на обмотку возбуждения.В двигателе с параллельным возбуждением обмотка возбуждения и якорь используют один и тот же источник питания, а с точки зрения производительности он такой же, как и у двигателя постоянного тока с независимым возбуждением.
Двигатель постоянного тока с возбуждением серии
Обмотка возбуждения двигателя постоянного тока с последовательным возбуждением соединена последовательно с обмоткой якоря, а затем подключена к источнику питания постоянного тока. Ток возбуждения этого Шаньдунского двигателя постоянного тока — это ток якоря.
Двигатель постоянного тока с комбинированным возбуждением
Двигатели постоянного тока с комбинированным возбуждением имеют две обмотки возбуждения: параллельное возбуждение и последовательное возбуждение.Если магнитодвижущая сила, создаваемая последовательной обмоткой, имеет то же направление, что и магнитодвижущая сила, создаваемая шунтирующей обмоткой, это называется возбуждением составного продукта. Если две магнитодвижущие силы имеют противоположные направления, это называется дифференциальным составным возбуждением.
Шаньдунские двигатели постоянного тока с разными методами возбуждения имеют разные характеристики. Как правило, основными режимами возбуждения двигателей постоянного тока являются шунтирующее возбуждение, последовательное возбуждение и составное возбуждение, тогда как основными режимами возбуждения генераторов постоянного тока являются раздельное возбуждение, шунтирующее возбуждение и составное возбуждение.
www.wantmotor.com Шунтирующие двигатели постоянного тока: где они используются?
Конструкция двигателя постоянного токаИзображение предоставлено: electric4u.com
В электрической терминологии параллельная цепь часто называется шунтом. Следовательно, двигатели постоянного тока, в которых якорь и обмотки возбуждения соединены параллельно, называются параллельными двигателями постоянного тока. Различия в конструкции между двигателями постоянного тока с последовательной обмоткой и параллельными двигателями постоянного тока приводят к некоторым различиям в работе между этими двумя типами, но наиболее существенное различие заключается в их скоростных характеристиках.Если двигатель постоянного тока с последовательной обмоткой демонстрирует прямую обратную зависимость между нагрузкой и скоростью, параллельный двигатель постоянного тока может поддерживать постоянную скорость независимо от нагрузки на двигатель.
Параллельная и последовательная обмотки
В двигателе постоянного тока с последовательной обмоткой обмотки якоря и обмотки возбуждения соединены последовательно, и ток через них равен (I всего = I a = I f ). Поскольку обмотки якоря и обмотки возбуждения шунтирующего двигателя постоянного тока соединены параллельно, ток в параллельном двигателе делится на две части: ток через якорь и ток через обмотки возбуждения, а общий ток является суммой двух частей. .
В шунтирующем двигателе постоянного тока обмотки якоря и возбуждения (шунтирующие) соединены параллельно. Параллельная цепь также известна как шунтирующая цепь; таким образом, используется термин «шунтирующий двигатель».Изображение предоставлено: National Instruments Corporation
Где:
I всего = ток питания
I a = ток через обмотки якоря
I sh = ток через шунтирующие (полевые) обмотки
Шунтирующие (полевые) обмотки шунтирующего двигателя постоянного тока сделаны из провода меньшего сечения, но у них намного больше витков, чем у двигателя постоянного тока с последовательной обмоткой.Большое количество витков позволяет создавать сильное магнитное поле, но провода меньшего сечения обеспечивают высокое сопротивление и ограничивают ток, протекающий через шунтирующую катушку. Следовательно, пусковой момент параллельного двигателя постоянного тока низкий, а это означает, что нагрузка на вал при запуске должна быть небольшой.
В параллельном двигателе постоянного тока крутящий момент пропорционален току якоря (как показано в уравнении крутящего момента ниже). Напротив, для двигателя постоянного тока с последовательной обмоткой крутящий момент увеличивается пропорционально квадрату тока якоря.Эта экспоненциальная зависимость крутящего момента от тока позволяет двигателям постоянного тока с последовательной обмоткой обеспечивать высокий пусковой момент и выдерживать высокие пусковые нагрузки.
Как параллельные двигатели постоянного тока достигают регулирования скорости
Когда напряжение подается на шунтирующий двигатель постоянного тока, якорь потребляет ток, достаточный для создания сильного магнитного поля, которое взаимодействует с магнитным полем, создаваемым шунтирующими обмотками, заставляя якорь вращаться. Вращающийся якорь (он же ротор) производит обратную ЭДС, которая противодействует напряжению якоря и снижает ток якоря.Если нагрузка на двигатель увеличивается, вращение якоря замедляется и уменьшается обратная ЭДС, так как обратная ЭДС пропорциональна скорости.
Где:
E b = задняя ЭДС
Φ = поток
P = количество полюсов
Z = количество витков
N = частота вращения
При меньшем напряжении обратной ЭДС и постоянном напряжении питания (E) сетевое напряжение увеличивается.
Увеличение сетевого напряжения приводит к увеличению тока якоря.Поскольку крутящий момент пропорционален току якоря, крутящий момент также увеличивается.
Где:
T = крутящий момент
A = площадь
Наконец, этот увеличенный крутящий момент позволяет двигателю увеличивать скорость и компенсировать замедление из-за нагрузки. Следовательно, шунтирующий двигатель постоянного тока может самостоятельно регулировать свою скорость и может называться двигателем с постоянной скоростью.
Когда к шунтирующему двигателю постоянного тока прикладывается нагрузка, его скорость уменьшается, но двигатель способен саморегулироваться и быстро компенсировать потерю скорости.Изображение предоставлено: electric4u.com
Используется для шунтирующих двигателей постоянного тока
Благодаря возможности саморегулирования скорости, параллельные двигатели постоянного тока идеально подходят для приложений, где требуется точное управление скоростью. Однако имейте в виду, что они не могут обеспечить высокий пусковой крутящий момент, поэтому нагрузка при запуске должна быть небольшой. Области применения, которые соответствуют этим критериям и подходят для шунтирующих двигателей постоянного тока, включают станки, такие как токарные и шлифовальные станки, а также промышленное оборудование, такое как вентиляторы и компрессоры.
Двигатель постоянного тока— классификация, рабочий механизм, применение и преимущества
Двигатель постоянного тока— это тип электродвигателя, который преобразует электрическую энергию в механическую. В этом посте мы подробно расскажем о двигателях постоянного тока, классификации двигателей постоянного тока, их принципе работы, применении, преимуществах и недостатках.
Что такое двигатель постоянного тока
Двигатель постоянного тока — это двигатель, который преобразует мощность постоянного тока во вращательное движение, и поэтому он называется двигателем постоянного тока (DC).Он работает по принципу преобразования энергии, то есть электрической энергии в механическую. Приложение напряжения создает крутящий момент, который приводит к движению.
Рис. 1 — Знакомство с двигателем постоянного тока
Внутренний вид этого типа двигателя показан на Рис. 2 ниже. Он состоит из четырех основных компонентов. Это:
- Статор
- Ротор
- Обмотка
- Коммутатор
Статор
Внешняя часть двигателя называется статором.Он состоит из двух или более полюсных наконечников постоянного магнита.
Ротор
Внутренняя часть двигателя, которая вращается, называется ротором. Он состоит из обмотки якоря, которая подключена к внешней цепи через коммутатор. Подобно статору, ротор также состоит из ферромагнитных материалов.
Рис. 2 — Внутренний вид двигателя постоянного тока
Обмотка
Обмотка состоит из последовательного или параллельного соединения катушек из меди.Они бывают двух типов:
- Обмотка якоря
- Обмотка возбуждения
Обмотка якоря
Несколько катушек соединены последовательно, образуя обмотку якоря, в которой индуцируется напряжение.
Обмотка возбуждения
Обмотка возбуждения — это группа катушек, которая создает основной магнитный поток поля, когда ток проходит через обмотку.
Коммутатор
Коммутатор действует как переключатель, который меняет направление тока между ротором и внешней цепью.
Как работает двигатель постоянного тока
Двигатель постоянного тока работает по принципу, согласно которому проводник с током, помещенный в магнитное поле, испытывает магнитное поле. Это направление силы задается правилом левой руки Флеминга, согласно которому, когда электрический ток проходит через катушку в магнитном поле, эта магнитная сила создает крутящий момент, который используется для привода этого типа двигателя.
Рис. 3 — (a) Принцип работы двигателя постоянного тока (b) Правило Флеминга для левой руки
Это многополюсный двигатель постоянного тока, показанный на рис.3. Здесь клеммы двигателя подключены к внешнему источнику постоянного тока. Таким образом, проводники якоря проводят ток, а полевые магниты возбуждаются и развивают чередующиеся северный и южный полюса. Здесь проводники на северном полюсе несут ток в одном направлении, а проводники на южном полюсе несут ток в противоположном направлении. Механическая сила действует на проводник якоря с током, когда он находится в магнитном поле.
Эти силы складываются, чтобы создать крутящий момент , который приводит к вращению якоря.Проводник перемещается от одной стороны щетки к другой, так что ток в этом проводнике меняется на противоположный, но направление силы, действующей на проводник, остается неизменным. Таким образом, меняя направление тока в каждом проводнике, когда он переходит от одного полюса к другому, он развивает непрерывный и однонаправленный крутящий момент.
Классификация двигателей постоянного тока
Машины постоянного тока классифицируются на основе электрических соединений обмотки якоря и обмотки возбуждения. Разные типы машин или двигателей производятся с разными типами соединений.Есть три типа двигателей постоянного тока. Это:
- Двигатели постоянного тока с постоянным магнитом
- Двигатели постоянного тока с отдельным возбуждением
- Двигатели постоянного тока с самовозбуждением
Постоянный магнит Двигатели постоянного тока
В двигателях с постоянными магнитами обмотка якоря помещается в магнитное поле, чтобы создают поток поля и не содержат обмотки поля. Этот тип двигателя использует постоянный магнит для создания магнитного поля, необходимого для его работы.Принципиальная схема двигателя с постоянным магнитом показана на рис.4, где:
Рис.4 — Двигатель с постоянным магнитом
Двигатели постоянного тока с раздельным возбуждением
В этом типе двигателя, Обмотка возбуждения возбуждается отдельным источником постоянного тока. Обмотка якоря и обмотка возбуждения электрически отделены друг от друга, как показано на Рис.5
Рис. Обмотка возбуждения подключается к клеммам основного напряжения вместо отдельного источника напряжения.Двигатели с самовозбуждением бывают трех типов. Это:
- Двигатель постоянного тока с параллельной обмоткой
- Двигатель постоянного тока с последовательной обмоткой
- Двигатель постоянного тока с комбинированной обмоткой
Двигатель постоянного тока с параллельной обмоткой
В двигателе с параллельной обмоткой обмотка возбуждения подключается параллельно обмотке якоря и подвергается прямому воздействию всего напряжения на клеммах. Он представлен схематически, как показано на рис. 6.
Рис. 6 — Двигатель постоянного тока с параллельной обмоткой
Двигатель постоянного тока с последовательной обмоткой
В двигателе с последовательной обмоткой ток якоря подключается последовательно с обмоткой возбуждения.Серийный двигатель с обмоткой имеет высокий крутящий момент и может нормально работать с приводами большой и малой мощности, а также с электроприводами с переменной и фиксированной скоростью. Благодаря своей простой конструкции и рабочему механизму он используется в таких приложениях, как электрическая тяга, электрические опоры, краны, подъемники, воздушные компрессоры и т. Д. Он представлен схематически, как показано на Рис. 7.
Рис. 7 — Двигатель постоянного тока с последовательной обмоткой
Двигатель постоянного тока с комбинированной обмоткой
Двигатель с комбинированной обмоткой представляет собой комбинацию как последовательного, так и шунтирующего двигателей, и он имеет обмотки возбуждения, подключенные как последовательно, так и параллельно обмотке якоря.Этот тип двигателя может быть подключен двумя способами, например,
Длинный шунт
В составном двигателе с длинным шунтом обмотка шунтирующего поля параллельна как якорю, так и последовательной обмотке поля, как показано на Рис. 8 (a), где:
Мы знаем, что в шунтирующем двигателе полный ток (I L ) является суммой тока якоря и тока шунта.
Аналогично, в последовательном токе якоря двигателя и последовательном токе одинаковы.
Таким образом, уравнение тока для двигателя постоянного тока с длинным шунтом:
Короткий шунт
В двигателе постоянного тока с коротким шунтом обмотка шунтирующего поля подключается параллельно только обмотке якоря. как показано на рис.8 (b) где:
В последовательном двигателе общий ток (I L ) и последовательный ток одинаковы.
В шунтирующем двигателе полный ток (I L ) является суммой тока якоря и тока шунта.
Таким образом, уравнение напряжения для короткого шунтирующего составного двигателя постоянного тока выглядит следующим образом:
Рис.8 — Составной двигатель постоянного тока
Применения двигателей постоянного тока
Приложения включают:
- постоянного тока Двигатели используются в ткацких и прядильных машинах.
- Двигатели с параллельной обмоткой используются в токарных станках и центрифугах.
- Они также используются в лифтах, вентиляторах и воздуходувках.
- Двигатели с комбинированным возбуждением используются в прессах, электрических экскаваторах, конвейерах и прокатных станах.
- Двигатели с постоянным магнитом широко используются в автомобилях для работы стеклоочистителей и омывателей, в вентиляторах для кондиционеров и обогревателей, а также для управления стеклоподъемниками.
- Они используются в приводах компьютеров или ноутбуков.
- Они также входят в состав кранов и компрессоров.
- Они используются в миксерах для пищевых продуктов, пылесосах, электрических зубных щетках и игрушках.
Преимущества двигателей постоянного тока
Двигатели постоянного тока имеют свои собственные существенные преимущества перед двигателями переменного тока, некоторые из них перечислены ниже:
- Он позволяет регулировать скорость в широком диапазоне номинальной скорости в шунтирующем типе постоянного тока. двигатель с использованием метода управления якорем. Этот метод используется на бумажных фабриках, где используются приложения с высокой скоростью. Двигатели серии
- постоянного тока обладают высоким пусковым моментом, который используется для движения тяжелых грузов в пусковых условиях, таких как электропоезда и краны.
- Он может поддерживать постоянный крутящий момент на валу двигателя в заданном диапазоне скоростей.
- Он может быстро запускаться, останавливаться, двигаться назад или ускоряться.
- Он имеет меньшее потребление реактивной мощности, чем двигатели переменного тока.
Недостатки двигателей постоянного тока
Есть также некоторые недостатки, которые перечислены ниже:
- Первоначальная стоимость установки этого двигателя выше, чем у двигателей переменного тока.
- Коммутатор и щеточный редуктор, присутствующие в этом двигателе, увеличивают стоимость эксплуатации и обслуживания.
- Их нельзя использовать во взрывоопасной среде, так как всегда существует риск искры от щеточного редуктора.
Также читают: Цветовые коды проводки - коды США, Великобритании, Европы и Канады, когда применять Принцип эффекта Холла - история, объяснение теории, математические выражения и приложения Как сделать простой инвертор в домашних условиях - шаг за шагом
Типы машин постоянного тока — javatpoint
Магнитный поток в машине постоянного тока создается катушками возбуждения, по которым проходит ток.Создание магнитного потока в устройстве за счет циркуляции тока в обмотке возбуждения называется возбуждением.
В машине постоянного тока есть два типа возбуждения. Раздельное возбуждение и самовозбуждение. При самовозбуждении ток, протекающий через обмотку возбуждения, подается самой машиной, а при раздельном возбуждении катушки возбуждения получают питание от отдельного источника постоянного тока.
Основные типы машин постоянного тока:
- Отдельно возбужденный d.c. машина
- Шунтирующий или шунтирующий аппарат. Машина для намотки серии
- или серийная.
- Станок для комбинированной раны или составной машины.
1. Машина постоянного тока с независимым возбуждением:
Когда отдельный источник постоянного тока используется для питания катушек возбуждения, он называется машиной постоянного тока с раздельным возбуждением. Соединения, показывающие машины постоянного тока с независимым возбуждением, показаны на рисунке.
Рисунок: (a) Генератор постоянного тока с независимым возбуждением, (b) с отдельным возбуждением D.C. Мотор.
2. Машина постоянного тока с шунтирующей обмоткой:
Машины постоянного тока с параллельной обмоткой — это машина, в которой обмотки возбуждения подключены параллельно якорю. Поскольку шунтирующее поле принимает полное выходное напряжение генератора или напряжение питания двигателя, оно обычно состоит из большого количества витков тонкой проволоки, по которой проходит небольшой ток возбуждения.
3. Машина постоянного тока с последовательной обмоткой:
Машины постоянного тока с обмоткой серии— это машина, в которой катушки возбуждения соединены последовательно с якорем.Последовательная обмотка возбуждения проводит ток якоря, а ток якоря велик, поэтому последовательная обмотка возбуждения состоит из нескольких витков провода с большим поперечным сечением.
Рисунок: (a) Последовательный генератор постоянного тока (b) Последовательный двигатель постоянного тока.
4. Станок постоянного тока с многослойной обмоткой:
Составная машина — это машина, которая имеет как шунтирующие, так и последовательные поля. Каждым полюсом машины вынесено по две обмотки. Последовательная обмотка имеет несколько витков с большим поперечным сечением, а шунтирующие обмотки имеют много витков тонкой проволоки.
Может быть подключен двумя способами. Если поле шунта подключено параллельно только якорю, машина называется составной машиной с коротким шунтом , а если поле шунта параллельно якорю и последовательному полю, машина называется составной машиной с длинным шунтом . машина .
Рисунок: (a) Составной генератор постоянного тока с короткозамкнутым шунтом (b) Электродвигатель постоянного тока с короткозамкнутым шунтом.
Рисунок: (a) Генератор постоянного тока с длинным шунтом (b) Длинный шунт D.C. мотор.
Уравнение ЭДС и крутящего момента:
При вращении якоря в катушках генерируется напряжение. В случае генератора э.д.с. вращения называется генерируемой ЭДС и E r = E g .
В случае двигателя э.д.с. вращения называется обратной ЭДС, и E r = E b . Выражение для обоих условий работы одинаковое.
Ток по часовой стрелке создает нисходящее поле, а ток против часовой стрелки создает восходящее поле.
Лет,
P = количество полюсов.
Φ = поток на полюс по Веберу.
Z = Общее количество жил в якоре.
N = Скорость якоря
A = Нет. параллельных путей в арматуре.
Рассмотрим проводник при перемещении из положения P в Q при шаге полюсов τP и необходимом для перехода из положения P в Q в t.
Время, необходимое для завершения N оборота = 1 мин. = 60 сек.
Время, затраченное на один оборот =
За один оборот якоря в генераторе полюса P каждый проводник якоря сокращает магнитный поток в P раз.Итак, поток, отсекаемый одним проводником за один оборот = фP
Средняя ЭДС, индуцированная в одном проводнике
E.M.F генерируется на каждом параллельном пути, который соединен через пару угольных щеток.
E.M.F на каждом пути
Уравнение крутящего момента:
Входная механическая мощность = ωT ………………… уравнение 1
T — электромагнитный крутящий момент, развиваемый двигателем, работающим с n r.p.s.
Вырабатываемая электрическая мощность = E x I a …………….. уравнение 2
Потребляемая механическая мощность = развиваемая электрическая мощность
При приравнивании уравнений 1 и 2
Приведенное выше уравнение является уравнением крутящего момента для машины постоянного тока.
Цепь якоря— обзор
22.8 Реактивность
Всякий раз, когда на клеммах генератора возникает трехфазное короткое замыкание, ток в цепи якоря внезапно увеличивается до большого значения, а поскольку сопротивление цепи мало по сравнению с его реактивное сопротивление, ток сильно отстает и p.f. примерно равно нулю. Из-за этого внезапного переключения есть две составляющие токов:
-
(1) составляющая переменного тока, (2) составляющая постоянного тока (затухающая).
Осциллограмма изменения тока как функции времени показана на рис. 22.9 для трехфазного короткого замыкания на клеммах генератора переменного тока.
Рисунок 22.9. Анализ симметричного тока короткого замыкания. Оа, непереходный ток; Обь — переходный ток; Oc, установившийся ток.
Ротор вращается с нулевой скоростью по отношению к полю из-за переменного тока составляющей тока в статоре, тогда как он вращается с синхронной скоростью относительно поля из-за постоянной составляющей тока в проводниках статора.Обмотка ротора действует как вторичная обмотка трансформатора, для которого первичной является обмотка статора. Точно так же в случае ротора, на полюсах которого закреплена демпферная обмотка, вся система будет работать как трехобмоточный трансформатор, в котором статор является первичной обмоткой, а обмотка возбуждения ротора и демпферная обмотка образуют вторичную обмотку трансформатора. Следует отметить, что действие трансформатора относится только к постоянной составляющей тока. Сильно запаздывающая переменная составляющая тока пытается размагнитить, т.е.е., уменьшите поток в воздушном зазоре.
Это уменьшение магнитного потока от момента короткого замыкания до установившегося режима не может происходить мгновенно из-за большого количества энергии, накопленной индуктивностью соответствующей системы. Таким образом, это изменение потока происходит медленно и зависит от постоянной времени системы.
Чтобы уравновесить внезапно увеличившееся размагничивающее mmf тока якоря, ток возбуждения, то есть ток обмотки возбуждения, должен увеличиваться в том же направлении потока, что и до повреждения.
Это происходит из-за действия трансформатора. В то же время ток в демпфере и вихревые токи в соседних металлических частях увеличиваются согласно закону Ленца, что помогает обмотке возбуждения ротора поддерживать поток в воздушном зазоре. В момент короткого замыкания существует взаимная связь между обмоткой статора, обмоткой ротора и демпферной обмоткой, и эквивалентная схема представлена на рис. 22.10A – C.
Рисунок 22.10. Синхронная эквивалентная схема — ось d: субпереходное состояние (A), переходное состояние (B) и установившееся состояние (C), и ось q: субпереходное состояние (D), переходное состояние (E).
Поскольку эквивалентное сопротивление демпферной обмотки по отношению к статору больше по сравнению с обмоткой ротора, постоянная времени демпферной обмотки t ″ меньше, чем обмотка возбуждения ротора. Таким образом, эффект демпферной обмотки и вихревых токов на поверхностях полюсов исчезает после первых нескольких циклов. Соответственно, эквивалентная схема после нескольких первых циклов сводится к схеме, показанной на рис. 22.10B. После еще нескольких циклов в зависимости от постоянной времени обмотки возбуждения t ‘, действие постоянного тока.компонент перестанет работать, и будет преобладать установившееся состояние, для которого эквивалентная схема показана на рис. 22.10C. Индуктивность увеличивается от начального состояния до конечного установившегося состояния.
т.е. синхронное реактивное сопротивление> переходное реактивное сопротивление> субпереходное реактивное сопротивление.
В субпереходном состоянии
(22,61) Xd || = XL + 11Xad + 1Xf + 1Xkd
В переходном состоянии
(22,62) Xd | = XL + 11Xad + 1Xf
В устойчивом состоянии Xd = XL + Xad
Аналогичным образом, если X g представляет фиктивную катушку g, чтобы представить эффект магнитных связей вдоль оси q, тогда
(22.63) Xq || = XL + 11Xaq + 1Xg + 1Xkq
Это субпереходное реактивное сопротивление Xq || очень маленький. За очень короткое время схема меняется на (рис. 22.10E), показывая, что Xq = Xq |
(22,64) Xq | = XL + 11Xaq = Xq = XL + Xaq
В устойчивом состоянии
(22,65) Xq = XL + Xaq
В следующей таблице показаны типичные значения констант для различных типов синхронных машин .
| Турбогенератор | Синхронный | Водяной генератор | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Двухполюсный | Четырехполюсный | С демпферами | С демпферами | без демпферов | 0 | 1,45 | 1,25 | 0,9 | 0,9 | ||||||||
| x sd | 1,4–2,5 | 1,35–1,65 | 0,75–1,8 | 0,5 | |||||||||||||
| Переходный процесс | 0,19 | 0,27 | 0,21 | 0,23 | 0,23 | ||||||||||||
| xd | | 0,11–0,25 | 0,24–0,31 | 0,12–0,27 | 0,14–0,32 | 0.14–0,32 | ||||||||||||
| Субпереходный | 0,13 | 0,19 | 0,13 | 0,16 | 0,18 | ||||||||||||
| Xd || | 0,08–0,18 | 0,15–0,23 | 0,09–0,15 | 0,1–0,27 | 0,16–0,3 | ||||||||||||
| Отрицательная последовательность | 0,16 | 0,28 | 0,16 | 0,28 | 0 | x 2 | 0,09–0,23 | 0.24–0,31 | 0,1–0,27 | 0,12–0,37 | |||||||
| Нулевая последовательность | 0,08 | 0,28 | 0,03 | 0,08 | 0,08 | 3 3 3 3 3 3 3 3 0,15 | 0,22–0,31 | 0,06–0,1 | 0,06–0,1 | ||||||||
| Константа инерции | 4,7 | 4,8 | 1,2 | 3,4 | 3,4 | 3,4 | 3,4 | 4,3–5,7 | 0,7–1,8 | 2–5 | 2–5 | ||||||
| Постоянная времени холостого хода | 9,5 | 5,5 | |||||||||||||||
| 3,5–16 | |||||||||||||||||
Примечание: Средние значения приведены в каждом блоке.
Типы генераторов постоянного тока: схема (шунтирующие, последовательные и составные)
— Объявление —
Типы генераторов постоянного тока — Генераторы постоянного тока представляют собой электрические устройства для преобразования механической энергии в электрическую.Резка магнитного потока арматурой создает ЭДС на основе закона Фарадея и электроиндукцию. ЭДС является причиной протекания тока в цепи.
Типы генераторов постоянного тока
Генераторы постоянного тока подразделяются на три основных типа в зависимости от методов возбуждения поля: генераторы постоянного магнита, с раздельным возбуждением и самовозбужденные генераторы постоянного тока. Первый тип возбуждает катушки возбуждения с помощью постоянных магнитов, в то время как отдельно возбуждаемые катушки включают внешнюю силу для возбуждения.Генератор постоянного тока с самовозбуждением включает в себя другой генератор и возбуждаемые им катушки возбуждения. Схема для типов генераторов постоянного тока приведена ниже, и поле постоянного магнита не включено, поскольку оно не широко используется в промышленности.
рисунок1. Типы генераторов постоянного тока (ссылка: electricacademia.com )Генераторы постоянного тока с постоянными магнитами
Этот тип генераторов, использующий постоянные магниты для создания потока в магнитной цепи, известен как генераторы постоянного тока с постоянными магнитами и является самым основным. тип генератора.Якорь и один или несколько постоянных магнитов размещены вокруг якоря. Этот тип не может обеспечивать большую мощность из-за конструкции генератора и не используется в промышленности. Генераторы постоянного тока с постоянными магнитами обычно используются в небольших приложениях, таких же как динамо-машины в мотоциклах.
На рисунке 2 показана основная форма генераторов постоянного тока с постоянными магнитами, и, как мы знаем, напряжение создается, когда провод разрезает поле, и его величина зависит от петель проводов и скорости вращения поля.Кроме того, величина напряжения является функцией угла между магнитным потоком и движущейся поверхностью. При вращении каждого контура напряжение изменяется от 0 до максимального значения в зависимости от угла и составляет абсолютную величину синусоидального напряжения. Увеличение количества витков под разными углами делает напряжение постоянным на максимальном значении.
Рисунок 2. Генераторы постоянного магнитного тока (ссылка: lectricacademia.com )индуцированное напряжение рассчитывается как:
В_ {ind} = Blv
где:
В ind = индуцированное напряжение в В
B = плотность потока, перпендикулярная движению, в Вт / м2
l = длина проводника, м
v = скорость проводника, м / с
Генераторы постоянного тока с раздельным возбуждением
Внешний источник постоянного тока (например,g., аккумулятор) используется в этой системе для возбуждения полевых магнитов. По мере увеличения скорости вращения он может обеспечивать более высокую ЭДС и напряжение на выходе. Принципиальная схема для отдельно возбуждаемых генераторов постоянного тока показана на рисунке 3, а символы следующие:
- I L = ток нагрузки
- I a = ток якоря
- E g = генерируемая ЭДС (Электромагнитная сила)
- В = Напряжение на клеммах
Генерируемая мощность и передаваемая мощность внешней силе могут быть рассчитаны как:
I_a = I_l = I
V = IR_ {a }
P_g = E_g \ times I
P_l = VI
Генераторы постоянного тока с самовозбуждением
Генераторы постоянного тока с самовозбуждением имеют магниты поля, которые возбуждаются их собственным током, и катушки возбуждения подключены к арматура внутри.В полюсах всегда присутствует некоторый поток из-за остаточного магнетизма. При вращении якоря вырабатывается некоторый ток, и этот небольшой ток течет через катушки возбуждения с нагрузкой, усиливая полюсный поток. При увеличении полюсного потока увеличиваются ЭДС и ток, и процесс накопления продолжается до тех пор, пока возбуждение не станет необходимым. Генераторы постоянного тока с самовозбуждением классифицируются на основе катушек возбуждения и их положения следующим образом:
- Генераторы с шунтирующей обмоткой
- Генераторы с комбинированной обмоткой Генераторы с обмоткой серии
Генераторы постоянного тока с параллельной обмоткой
Обмотки возбуждения соединены с проводниками якоря параллельно для возбуждения генератора.Обмотки возбуждения представляют собой изолированные катушки с током, которые создают необходимое магнитное поле для возбуждения генератора. Шунтирующий генератор возбуждается за счет остаточного магнетизма в полюсах, и обмотки возбуждения имеют то же напряжение, что и клеммы в шунтирующем генераторе, в то время как фактическое значение этого напряжения зависит от нагрузки и ее скорости. Принципиальная схема этого типа приведена ниже:
Рисунок 4. Принципиальная схема генераторов постоянного тока с шунтирующей обмоткой (ссылка: lectric4u.com )где:
- В = напряжение на клеммах
- E g = генерируемая ЭДС
- I sh = ток, протекающий через поле шунта
- I a = Ток якоря
- I L = Ток нагрузки
- R sh = Сопротивление шунтирующей обмотки
- R a = Сопротивление якоря
Ток якоря I a состоит из двух частей: ток возбуждения шунта I sh и ток нагрузки I L .
I_a = I_ {sh} + I_l
Когда IL является максимальным, эффективная мощность нагрузки будет максимальной. В результате лучше поддерживать как можно более низкий ток шунта. Поэтому разумно поддерживать высокое сопротивление шунта.
I_ {sh} = \ frac {V} {R_ {sh}}
V = E_g-I_aR_a
Генерируемая мощность и мощность, подаваемая на нагрузку:
P_g = E_g \ times I_g
P_l = V \ times I_l
Генераторы с последовательной обмоткой
Обмотка возбуждения включена последовательно с проводниками якоря в генераторах с последовательной обмоткой.{2} \ times R_a
Генерируемая мощность и мощность, передаваемая нагрузке:
P_g = I \ timesE_g
P_l = I \ timesV
Генераторы постоянного тока с комбинированной обмоткой
Выход Напряжение и ЭДС зависят от тока нагрузки в последовательном типе обмотки, и, с другой стороны, в шунтирующем типе выход пропорционален обратной величине тока нагрузки. Чтобы преодолеть недостаток обоих типов, доступны генераторы с составной обмоткой, сочетающие как последовательные, так и шунтирующие.Схема генераторов составной обмотки включает как последовательную, так и шунтирующую полевую обмотку. Якорь имеет последовательную и параллельную обмотку и включает два типа генератора с короткими шунтирующими составными обмотками и генераторов с длинными шунтирующими составными обмотками.
Генераторы постоянного тока с длинным шунтом
В генераторах постоянного тока с длинным шунтом обмотки шунта параллельны как последовательному полю, так и якорю. Принципиальная схема этого типа приведена ниже:
Рисунок 6.принципиальная схема короткозамкнутых генераторов постоянного тока с комбинированной обмоткой (ссылка: lectric4u.com )Токи в цепи:
I_ {sh} = \ frac {V} {R_ {sh}}
I_ {cs} = I_l + I {sh}
I_ {cs} = I_a
Напряжение нагрузки равно:
В = E_g-I_a (R_a-R {sc})
Генерируемая мощность и мощность, передаваемая нагрузке:
P_g = I_G \ times E_g
P_l = I_G \ times V
Короткий шунтирующий генератор постоянного тока
Вкратце, якорь параллелен шунтирующие обмотки возбуждения, как показано на следующем рисунке:
Рисунок6.принципиальная схема короткозамкнутых генераторов постоянного тока с комбинированной обмоткой (ссылка: lectric4u.com )Токи в этих системах:
I_ {sc} = I_ {l}
I_ {sh} = \ frac { V + I_ {sc} R_ {sc}} {R_ {sh}}
I_ {a} = I_ {sc} + I_ {l}
Напряжение нагрузки, мощность нагрузки и генерируемая мощность:
V = E_g-I_aR_a-I_ {sc} R {sc})
P_l = I_G \ times V
P_g = I_G \ times E_g
— Реклама —
.