Как устроен двигатель постоянного тока с постоянными магнитами. Каковы его основные преимущества перед другими типами двигателей. Где применяются двигатели постоянного тока с постоянными магнитами. Какие существуют разновидности конструкции таких двигателей.
Принцип работы двигателя постоянного тока с постоянными магнитами
Двигатель постоянного тока с постоянными магнитами состоит из двух основных частей:
- Статор — неподвижная часть с постоянными магнитами
- Ротор (якорь) — вращающаяся часть с обмоткой
Принцип работы такого двигателя основан на взаимодействии магнитных полей статора и ротора:
- На обмотку ротора подается постоянный ток
- Вокруг проводников обмотки создается магнитное поле
- Это поле взаимодействует с полем постоянных магнитов статора
- Возникает вращающий момент, заставляющий ротор вращаться
- Специальный узел (коллектор) обеспечивает переключение тока в обмотках при вращении
Таким образом, электрическая энергия преобразуется в механическую энергию вращения вала двигателя.

Преимущества двигателей постоянного тока с постоянными магнитами
Данный тип двигателей обладает рядом важных достоинств:
- Высокий КПД — до 90% и выше
- Большой пусковой момент
- Линейные механические характеристики
- Широкий диапазон регулирования скорости
- Компактные размеры и малый вес
- Простота конструкции и управления
- Низкая стоимость
Эти преимущества обусловлены использованием постоянных магнитов вместо электромагнитов для создания магнитного поля статора.
Области применения двигателей постоянного тока с постоянными магнитами
Благодаря своим достоинствам, такие двигатели широко применяются в различных сферах:
- Электроинструменты (дрели, шуруповерты, пилы)
- Бытовая техника (пылесосы, кухонные комбайны)
- Автомобильная электроника (стеклоподъемники, дворники)
- Компьютерная техника (вентиляторы, приводы дисков)
- Игрушки и модели
- Медицинское оборудование
- Промышленные приводы малой мощности
Особенно эффективно использование таких двигателей в портативных устройствах с батарейным питанием.
Разновидности конструкции двигателей постоянного тока с постоянными магнитами
Существует несколько вариантов конструктивного исполнения данных двигателей:
По расположению магнитов:
- С радиальным расположением магнитов на статоре
- С аксиальным расположением магнитов в торцах статора
По типу магнитов:
- С ферритовыми магнитами
- С редкоземельными магнитами (неодим-железо-бор)
По конструкции ротора:
- С цилиндрическим якорем
- С дисковым якорем
- С печатной обмоткой якоря
Выбор конкретной конструкции зависит от требуемых характеристик и условий применения двигателя.
Сравнение двигателей постоянного тока с постоянными магнитами и других типов электродвигателей
Рассмотрим основные отличия данных двигателей от других распространенных типов:
Преимущества перед двигателями постоянного тока с электромагнитным возбуждением:
- Меньшие габариты и вес
- Более высокий КПД
- Отсутствие обмотки возбуждения
- Простота конструкции
Недостатки по сравнению с асинхронными двигателями:
- Наличие коллекторно-щеточного узла
- Меньшая надежность
- Необходимость в обслуживании коллектора
Отличия от вентильных (бесколлекторных) двигателей:
- Более простая система управления
- Меньшая стоимость
- Хуже массогабаритные показатели
- Ниже максимальная скорость вращения
Таким образом, двигатели постоянного тока с постоянными магнитами занимают промежуточное положение между коллекторными и бесколлекторными двигателями по своим характеристикам.

Особенности управления двигателями постоянного тока с постоянными магнитами
Управление скоростью и моментом таких двигателей имеет свою специфику:
Способы регулирования скорости вращения:
- Изменение напряжения питания якоря
- Широтно-импульсная модуляция (ШИМ) напряжения
- Введение добавочного сопротивления в цепь якоря
Особенности управления моментом:
- Момент пропорционален току якоря
- Для ограничения пускового тока используют плавный пуск
- Возможно динамическое торможение
Типовые схемы управления:
- Однополупериодные ключевые схемы
- Мостовые (H-мост) схемы управления
- Специализированные драйверы двигателей
Применение современных схем управления позволяет реализовать прецизионное регулирование скорости и момента двигателей постоянного тока с постоянными магнитами.
Перспективы развития двигателей постоянного тока с постоянными магнитами
Несмотря на конкуренцию со стороны бесколлекторных двигателей, данный тип двигателей продолжает развиваться:
- Применение новых магнитных материалов с улучшенными характеристиками
- Оптимизация конструкции для повышения удельной мощности
- Совершенствование коллекторно-щеточного узла
- Разработка интеллектуальных систем управления
- Интеграция двигателей в мехатронные модули
Это позволяет расширять области применения двигателей постоянного тока с постоянными магнитами и повышать их конкурентоспособность.

Коллекторный двигатель постоянного тока | АВИ Солюшнс
В отечественной классификации двигатели, о которых пойдёт речь ниже, обычно называют двигателями постоянного тока с возбуждением от постоянных магнитов. Вообще говоря, двигатели постоянного тока могут иметь различную конструкцию (например, с возбуждением от обмотки возбуждения), но среди двигателей малой мощности, массово применяемых в сервоприводах в основном применяются именно двигатели с постоянными магнитами.
Как работает коллекторный двигатель?
Коллекторный двигатель постоянного тока имеет обмотку на роторе и постоянный магнит на статоре. Обмотка ротора состоит из нескольких сегментов, которые подключены к пластинам коллектора. Щётки, перемещающиеся по коллектору, обеспечивают передачу электрического тока между статором и ротором, а также переключение сегментов обмотки при вращении ротора. При подаче постоянного напряжения к выводам двигателя электрический ток протекает через щётки и коллектор в сегменты обмотки, подключённые к пластинам коллектора на которых в настоящий момент стоят щётки.
Возможные варианты и специальные случаи
Выпускаемые сейчас бесколлекторные двигатели могут иметь самую разную конструкцию.
Коллекторные двигатели постоянного тока могут выпускаться с различной технологией изготовления обмотки. Есть двигатели с классической обмоткой, намотанной на стальной сердечник, и двигатели с полой цилиндрической обмоткой без стального сердечника. С точки зрения параметров имеется определённая разница между обмотками различных типов. Во-первых, классическая обмотка имеет существенно большую индуктивность, чем полая цилиндрическая обмотка, и соответственно большую постоянную времени. По этой причине, полая цилиндрическая обмотка допускает более динамичное изменение тока (момента), однако при работе от контроллера двигателя с невысокой частотой ШИМ модуляции для сглаживания пульсаций тока требуются фильтрующие дроссели большей индуктивности (а соответственно и большего размера). Во-вторых, классическая обмотка имеет большой момент инерции. При расположении обмотки на роторе, момент инерции ротора увеличивается, что отрицательно сказывается на динамике двигателя, особенно в случае работы на малоинерционную нагрузку. Кроме того, классическая обмотка, как правило, имеет заметно больший момент магнитной фиксации, а также меньший КПД, чем полая цилиндрическая обмотка.
По этой причине, полая цилиндрическая обмотка допускает более динамичное изменение тока (момента), однако при работе от контроллера двигателя с невысокой частотой ШИМ модуляции для сглаживания пульсаций тока требуются фильтрующие дроссели большей индуктивности (а соответственно и большего размера). Во-вторых, классическая обмотка имеет большой момент инерции. При расположении обмотки на роторе, момент инерции ротора увеличивается, что отрицательно сказывается на динамике двигателя, особенно в случае работы на малоинерционную нагрузку. Кроме того, классическая обмотка, как правило, имеет заметно больший момент магнитной фиксации, а также меньший КПД, чем полая цилиндрическая обмотка.
Коллекторные двигатели могут также отличаться материалом, использованным при изготовлении щёток. В настоящее время при изготовлении коллекторных двигателей малой мощности применяются главным образом две технологии – графитовые и металлические щётки. Графитовые щётки изготавливаются из медно-графитового сплава и представляют собой бруски сложной формы, прижимаемые к коллектору пружинами.
Отличия от других типов двигателей
Одно из основных отличий коллекторного двигателя от бесколлекторных ДПТ и от синхронных двигателей с постоянными магнитами – это наличие щёточно-коллекторного узла. Эта часть двигателя отличается повышенным износом, поскольку представляет собой электрическое соединение подвижных частей.
Когда нужен коллекторный двигатель?
Несмотря на срок службы и удельную мощность меньшие, чем у бесколлекторных двигателей, коллекторные двигатели по-прежнему представлены в каталогах производителей и продолжают применяться в различных проектах.
В тех случаях, когда в системе предполагается использование управления двигателем без использования обратной связи, коллекторный двигатель имеет очевидные преимущества: для его работы в таком случае можно обойтись без специализированного контроллера – достаточно обычного источника питания. Если двигатель подключается к управляющей электронике более или менее длинным кабелем, то будет существенна разница по количеству проводов, требуемых для подключения двигателя: 2 у коллекторного против 8 у бесколлекторного (с учётом датчиков Холла).
Электродвигатели, их классификация
Электрический двигатель — электрическая машина (электромеханический преобразователь), в которой электрическая энергия преобразуется в механическую.
В зависимости от назначения, от предполагаемых режимов и условий работы, от типа питания и т. д., все электродвигатели можно классифицировать по нескольким параметрам: по принципу получения рабочего момента, по способу работы, по роду тока питания, по способу управления фазами, по типу возбуждения и т. д. Давайте же рассмотрим классификацию электродвигателей более подробно.
Возникновение вращающего момента
Вращающий момент в электродвигателях может быть получен одним из двух способов: по принципу магнитного гистерезиса либо чисто магнитоэлектрически. Гистерезисный двигатель получает вращающий момент посредством явления гистерезиса во время перемагничивания магнитно-твердого ротора, в то время как у магнитоэлектрического двигателя вращающий момент является результатом взаимодействия явных магнитных полюсов ротора и статора.
Гистерезисный двигатель получает вращающий момент посредством явления гистерезиса во время перемагничивания магнитно-твердого ротора, в то время как у магнитоэлектрического двигателя вращающий момент является результатом взаимодействия явных магнитных полюсов ротора и статора.
Магнитоэлектрические двигатели по праву составляют сегодня львиную долю всего обилия электродвигателей, применяемых в очень многих областях. Они подразделяются по роду питающего тока на: двигатели постоянного тока, двигатели переменного тока и универсальные двигатели.
В отличие от магнитоэлектрического двигателя, в гистерезисном двигателе допускается перемещение намагниченности ротора относительно его геометрических осей, и именно данная особенность не позволяет распространять на синхронный режим работы гистерезисного двигателя общие закономерности магнитоэлектрического преобразования.
Двигатели постоянного тока
У двигателя, который питается постоянным током, за переключение фаз отвечает сам двигатель. Это значит, что хотя на электрическую машину и подается постоянный ток, тем не менее, благодаря действию внутренних механизмов устройства, магнитное поле оказывается движущимся и становится в состоянии поддерживать вращающий момент ротора (как будто в обмотке статора действует переменный ток).
Это значит, что хотя на электрическую машину и подается постоянный ток, тем не менее, благодаря действию внутренних механизмов устройства, магнитное поле оказывается движущимся и становится в состоянии поддерживать вращающий момент ротора (как будто в обмотке статора действует переменный ток).
По способу создания движущегося магнитного поля, двигатели постоянного тока подразделяются на вентильные (бесколлекторные) и коллекторные. Бесколлекторные двигатели имеют в своей конструкции электронные инверторы, которые и осуществляют переключение фаз. Коллекторные же двигатели традиционно оснащены щеточно-коллекторными узлами, которые призваны чисто механически синхронизировать питание обмоток двигателя с вращением его движущихся частей.
Возбуждение коллекторных двигателей
Коллекторные двигатели по способу возбуждения бывают следующих видов: с независимым возбуждением от постоянных магнитов или от электромагнитов, либо с самовозбуждением. Двигатели с возбуждением от постоянных магнитов содержат магниты на роторе. Двигатели с самовозбуждением имеют на роторе специальную якорную обмотку, которая может быть включена параллельно, последовательно или смешано со специальной обмоткой возбуждения.
Двигатели с возбуждением от постоянных магнитов содержат магниты на роторе. Двигатели с самовозбуждением имеют на роторе специальную якорную обмотку, которая может быть включена параллельно, последовательно или смешано со специальной обмоткой возбуждения.
Двигатель пульсирующего тока
На двигатель постоянного тока похож двигатель пульсирующего тока. Отличие заключается в наличии шихтованных вставок на остове, а также дополнительных шихтованных полюсов. Кроме того, у двигателя пульсирующего тока имеется компенсационная обмотка. Применение такие двигатели находит в электровозах, где они обычно питается выпрямленным переменным током.
Двигатель переменного тока
Двигатели переменного тока, как ясно из названия, питаются током переменным. Бывают они синхронными и асинхронными.
У синхронных двигателей переменного тока магнитное поле статора движется с той же угловой скоростью, что и ротор, а у асинхронных всегда есть некое отставание (характеризующееся величиной скольжения s) — магнитное поле статора в своем движении как бы опережает ротор, который в свою очередь все время стремится его догнать.
Синхронные двигатели больших мощностей (мощностью в сотни киловатт) имеют на роторе обмотки возбуждения. Роторы менее мощных синхронных двигателей оснащены постоянными магнитами, которые и образуют полюса. Гистерезисные двигатели тоже в принципе относятся к синхронным.
Шаговые двигатели — это особая категория синхронных двигателей с высокой точностью управления скоростью вращения, вплоть до дискретного счета шагов.
Вентильные синхронные реактивные двигатели получают питание через инвертор.
Асинхронные двигатели переменного тока отличаются тем, что у них угловая скорость вращения ротора всегда меньше чем угловая скорость вращения магнитного поля статора. Асинхронные двигатели бывают однофазными (с пусковой обмоткой), двухфазными (к ним относится и конденсаторный двигатель), трехфазными и многофазными.
Универсальные коллекторные двигатели
Универсальный коллекторнй двигатель может работать хоть от постоянного, хоть от переменного тока (50 Гц). Имеет последовательное возбуждение, используется в бытовых электроприборах, где требуется скорость вращения более высокая чем максимальные для обычных двигателей переменного тока 3000 об/мин. Как правило, мощность таких двигателей не превышает 200 Вт. Встречается тиристорное управление скоростью вращения универсального двигателя.
Имеет последовательное возбуждение, используется в бытовых электроприборах, где требуется скорость вращения более высокая чем максимальные для обычных двигателей переменного тока 3000 об/мин. Как правило, мощность таких двигателей не превышает 200 Вт. Встречается тиристорное управление скоростью вращения универсального двигателя.
Усовершенствованная разновидность универсального двигателя — синхронный двигатель с датчиком положения ротора, где роль коллектора выполняет электронный инвертор.
Ранее ЭлектроВести писали, что американский стартап Malta получил $26 млн на создание системы хранения избыточной возобновляемой энергии в отдельных емкостях с расплавленной солью и жидкостью, подобной антифризу. Разработку поддержал фонд Breakthrough Energy Ventures, инвесторами которого являются Джефф Безос и Майкл Блумберг, а председателем Билл Гейтс.
По материалам: electrik.info.
Бесколлекторный двигатель постоянного тока: принцип работы, варианты конструкций
Содержание:
Бесколлкторные двигатели постоянного тока (бдпт) являются разновидностью синхронных двигателей с постоянными магнитами, которые питаются от цепи постоянного тока через инвертор, управляемый контроллером с обратной связью. Контроллер подаёт на фазы двигателя напряжения и токи, необходимые для создания требуемого момента и работы с нужной скоростью. Такой контроллер заменяет щёточно-коллекторный узел, используемый в коллекторных двигателях постоянного тока. Бесколлекторные двигатели могут работать как с напряжениями на обмотках в форме чистой синусоиды, так и кусочно-ступенчатой формы (например, при блочной коммутации).
Контроллер подаёт на фазы двигателя напряжения и токи, необходимые для создания требуемого момента и работы с нужной скоростью. Такой контроллер заменяет щёточно-коллекторный узел, используемый в коллекторных двигателях постоянного тока. Бесколлекторные двигатели могут работать как с напряжениями на обмотках в форме чистой синусоиды, так и кусочно-ступенчатой формы (например, при блочной коммутации).
Появились бесколлекторные двигатели постоянного тока как попытка избавить коллекторные двигатели постоянного тока с постоянными магнитами от их слабого места – щёточно-коллекторного узла. Этот узел, представляющий собой вращающийся электрический контакт, является слабым местом у коллекторных двигателей с точки зрения надёжности и в ряде случаев ограничивает их параметры.
Принцип работы и устройство бесколлекторного двигателя
Как и остальные двигатели, бесколлекторный двигатель состоит из двух основных частей – ротора (подвижная часть) и статора (неподвижная часть). На статоре располагается трёхфазная обмотка. Ротор несёт на себе постоянный магнит, который может иметь одну или несколько пар полюсов. Когда к обмотке статора приложена трёхфазная система напряжений, то обмотка создаёт вращающееся магнитное поле. Оно взаимодействует с постоянным магнитом на роторе и приводит его в движение. По мере того как ротор поворачивается, вектор его магнитного поля проворачивается по направлению к магнитному полю статора. Управляющая электроника отслеживает направление, которое имеет магнитное поле ротора и изменяет напряжения, приложенные к обмотке статора, таким образом чтобы магнитное поле, создаваемое обмотками статора, повернулось, опережая магнитное поле ротора. Для определения направления магнитного поля ротора используется датчик положения ротора, поскольку магнит, создающий это поле жёстко закреплён на роторе. Напряжения на обмотках бесколлекторного двигателя можно формировать различными способами: простое переключение обмоток через каждые 60° поворота ротора или формирование напряжений синусоидальной формы при помощи широтно-импульсной модуляции.
На статоре располагается трёхфазная обмотка. Ротор несёт на себе постоянный магнит, который может иметь одну или несколько пар полюсов. Когда к обмотке статора приложена трёхфазная система напряжений, то обмотка создаёт вращающееся магнитное поле. Оно взаимодействует с постоянным магнитом на роторе и приводит его в движение. По мере того как ротор поворачивается, вектор его магнитного поля проворачивается по направлению к магнитному полю статора. Управляющая электроника отслеживает направление, которое имеет магнитное поле ротора и изменяет напряжения, приложенные к обмотке статора, таким образом чтобы магнитное поле, создаваемое обмотками статора, повернулось, опережая магнитное поле ротора. Для определения направления магнитного поля ротора используется датчик положения ротора, поскольку магнит, создающий это поле жёстко закреплён на роторе. Напряжения на обмотках бесколлекторного двигателя можно формировать различными способами: простое переключение обмоток через каждые 60° поворота ротора или формирование напряжений синусоидальной формы при помощи широтно-импульсной модуляции.
Варианты конструкции двигателя
Обмотка двигателя может иметь различную конструкцию. Обмотка классической конструкции наматывается на стальной сердечник. Другой вариант конструкции обмотки – это обмотка без стального сердечника. Проводники этой обмотки равномерно распределяются вдоль окружности статора. Характеристики обмотки получаются различными, что отражается и на характеристиках двигателя. Кроме того, обмотки могут быть выполнены на различное число фаз и с различным количеством пар полюсов.
Бесколлекторные двигатели также могут иметь конструкции, различающиеся по взаимному расположению ротора и статора. Наиболее распространена конструкция, когда ротор охватывается статором снаружи – двигатели с внутренним ротором. Но также возможна, и встречается на практике конструкция в которой ротор расположен снаружи статора – двигатели с внешним ротором. Третий вариант – статор расположен параллельно ротору и оба располагаются перпендикулярно оси вращения двигателя. Такие двигатели называют двигателями аксиальной конструкции.
Такие двигатели называют двигателями аксиальной конструкции.
Датчик положения, который измеряет угловое положение ротора двигателя — это важная часть приводной системы, построенной на бесколлекторном двигателе. Этот датчик может быть самым разным как по типу, так и по принципу действия. Традиционно используемый для этой цели тип датчиков – датчики Холла с логическим выходом, устанавливаемые на каждую фазу двигателя. Выходные сигналы этих датчиков позволяют определить положение ротора с точностью до 60° — достаточной реализации самых простых способов управления обмотками. Для реализации способов управления двигателем, предполагающих формирование на обмотках двигателя системы синусоидальных напряжений при помощи ШИМ необходим более точный датчик, например, энкодер. Инкрементные энкодеры, очень широко используемые в современном электроприводе, могут обеспечить достаточно информации о положении ротора только при использовании их вместе с датчиками Холла. Если бесколлекторный двигатель оснащён абсолютным датчиком положения – абсолютным энкодером или резольвером (СКВТ), то датчики Холла становятся не нужны, так как любой из этих датчиков обеспечивает полную информацию о положении ротора.
Можно управлять бесколлекторным двигателем, и не используя датчика положения ротора – бездатчиковая коммутация. В этом случае информация о положении ротора восстанавливается на основании показаний других датчиков, например, датчиков фазных токов двигателя или датчиков напряжения. Такой способ управления часто влечёт за собой ряд недостатков (ограниченный диапазон скоростей, высокая чувствительность к параметрам двигателя, специальная процедура старта), что ограничивает его распространение.
Преимущества и недостатки
Высокая надёжность вследствие отсутствия коллектора. Это основное отличие бесколлекторных двигателей от коллекторных. Щёточно-коллекторный узел, является подвижным электрическим контактом и сам по себе имеет невысокую надёжность и устойчивость к влиянию различных воздействий со стороны окружающей среды.
Отсутствие необходимости обслуживания коллекторного узла. Является особенно актуальным для двигателей среднего и крупного габарита. Для микроэлектродвигателей, проведение ремонта экономически оправдано далеко не во всех случаях, поэтому для них этот пункт не является актуальным.
Для микроэлектродвигателей, проведение ремонта экономически оправдано далеко не во всех случаях, поэтому для них этот пункт не является актуальным.
Сложная схема управления. Прямое следствие переноса функции переключения токов обмотки во внешний коммутатор. Если в простейшем случае для управления коллекторным двигателем необходимо иметь только источник питания, то для бесколлекторного двигателя такой подход не работает – контроллер нужен даже для решения самых простых задач управления движением. Однако, когда речь идёт о решении для сложных случаев (например, задачи позиционирования), то контроллер становится необходим для всех типов двигателей.
Высокая скорость вращения. В коллекторных двигателях скорость перемещения щётки по коллектору ограничена, хотя и различна для различных конструкций этих двух деталей и различных используемых материалов. Предельная скорость перемещения щёток по коллектору сильно ограничивает скорость вращения коллекторных двигателей. Бесколлекторные двигатели не имеют такого ограничения, что позволяет выполнять их для работы на скоростях до нескольких сотен тысяч оборотов в минуту – цифра недостижимая для коллекторных двигателей.
Бесколлекторные двигатели не имеют такого ограничения, что позволяет выполнять их для работы на скоростях до нескольких сотен тысяч оборотов в минуту – цифра недостижимая для коллекторных двигателей.
Большая удельная мощность. Возможность достичь большой удельной мощности является следствием высокой скорости вращения, доступной для бесколлекторного двигателя.
Хороший отвод тепла от обмотки. Обмотка бесколлекторных двигателей неподвижно закреплена на статоре и есть возможность обеспечить хороший тепловой контакт её с корпусом, который передаёт тепло, выделяемое в двигателе, в окружающую среду. У коллекторного двигателя обмотка установлена на роторе, и её тепловой контакт с корпусом гораздо хуже, чем у бесколлекторного двигателя.
Больше проводов для подключения. Когда двигатель расположен близко от контроллера, то это конечно не повод для огорчения. Однако если условия окружающей среды, в которых работает двигатель очень сложны, то вынесение управляющей электроники на значительное расстояние (десятки и сотни метров) от двигателя является подчас единственным доступным вариантом для разработчиков системы. В таких условиях каждая дополнительная цепь для подключения двигателя, будет требовать дополнительных жил в кабеле, увеличивая его размеры и массу.
В таких условиях каждая дополнительная цепь для подключения двигателя, будет требовать дополнительных жил в кабеле, увеличивая его размеры и массу.
Уменьшение электромагнитных помех, исходящих от двигателя. Щёточно-коллекторный контакт создаёт при работе достаточно сильные помехи. Частота этих помех зависит от частоты вращения двигателя, что осложняет борьбу с ними. У бесколлекторного двигателя единственным источником помех является ШИМ силовых ключей, частота которого обычно постоянна.
Присутствие сложных электронных компонентов. Электронные компоненты (датчики Холла, например) более остальных составных частей двигателя уязвимы для действия жёстких условий со стороны внешней среды, будь то высокая температура, низкая температура или ионизирующие излучения. Коллекторные двигатели не содержат электроники и у них подобная уязвимость отсутствует.
Где применяются бесколлекторные двигатели
К настоящему времени бесколлекторные двигатели получили широкое распространение, как благодаря своей высокой надёжности, высокой удельной мощности и возможности работать на высокой скорости, так и из-за быстрого развития полупроводниковой техники, сделавшей доступными мощные и компактные контроллеры для управления этими двигателями.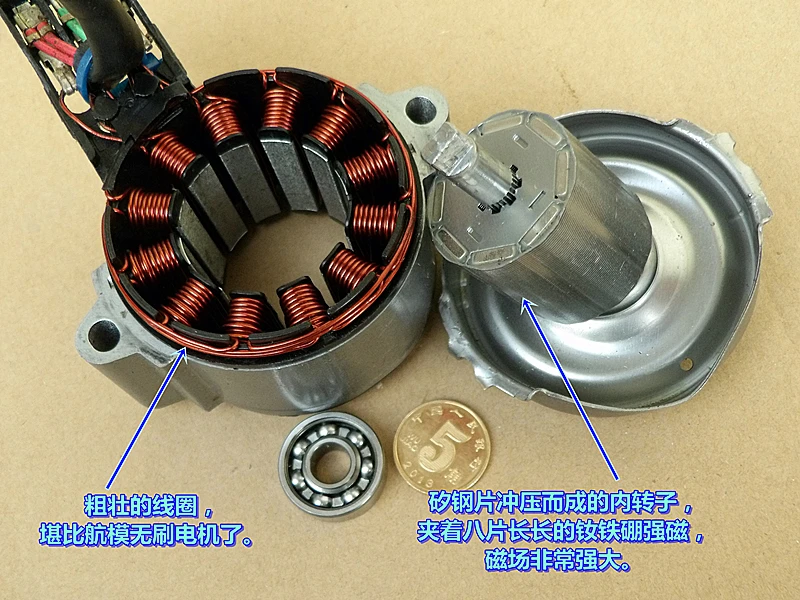
Бесколлекторные двигатели широко применяются в тех системах где их характеристики дают им преимущество перед двигателями других типов. Например, там, где требуется скорость вращения несколько десятков тысяч оборотов в минуту. Если от изделия требуется большой срок службы, а ремонт невозможен или ограничен из-за особенностей эксплуатации изделия, то и тогда бесколлекторный двигатель будет хорошим выбором.
Читать дальше:Применение — Двигатель с постоянными магнитами
Двигатель с постоянными магнитами — это тип двигателя, в котором используется магнитное поле постоянного магнита, а не возбуждающая обмотка двигателя. Двигатели с постоянными магнитами можно разделить на генераторы с постоянными магнитами и двигатели с постоянными магнитами на основе форм преобразования энергии между механической и электрической энергией. Постоянные магниты также можно разделить на двигатели переменного и постоянного тока в зависимости от формы тока, а также на микро- и малые двигатели в основном в форме постоянного тока, а двигатели мощностью в сотни ватт обычно имеют форму переменного тока.
Двигатель постоянного тока попадает в щеточный двигатель постоянного тока и бесщеточный двигатель постоянного тока в зависимости от того, есть щетка или нет. Двигатель переменного тока может быть разделен на асинхронный двигатель переменного тока и синхронный двигатель переменного тока в соответствии с фазой.
Потребляемая мощность и рабочие характеристики двигателя могут быть улучшены за счет возбуждения поля постоянным магнитом. Двигатель с постоянными магнитами широко используется в различных областях, и две трети редкоземельных магнитов используются для производства двигателей с постоянными магнитами.
| Тип | Название двигателя | Приложения |
| Электродвигатель переменного тока | Синхронный генератор | Однофазный и трехфазный источник питания переменного тока, вспомогательный возбудитель и система ветряных турбин. |
| Генератор тахометра переменного тока | Измерение скорости и скорости вращения полета, паруса, локомотива и токарного станка. | |
| Индукционный генератор | Однофазный промежуточный источник питания. | |
| Зажигание Магнето | Система зажигания локомотива, поезда и самолета. | |
| Cинхронный двигатель | Выдувная машина, водяной насос и текстильная машина. | |
| Двигатель постоянного тока | Электродвигатели постоянного тока | Микромотор в камере, бытовой технике, электронной промышленности и инструменте. |
| DC Servo Motor | Автоматизация и система дистанционного управления. | |
| Мотор тахометра постоянного тока | Измерение скорости вращения. |
|
| Двигатель постоянного тока | Лифт и аэрокосмический. | |
| Другие двигатели: шаговый двигатель, бесщеточный двигатель постоянного тока, пьезоэлектрический двигатель, двигатель Холла и двигатель звуковой катушки. | Промышленная автоматизация и автоматизация делопроизводства. |
Генератор ветровой энергии в чистой энергии является крупнейшим пользователем спеченного неодимового магнита. Энергия ветра считается одной из наиболее потенциальных возобновляемых источников энергии для замены ископаемого топлива и пользуется политической поддержкой со стороны правительств, поэтому постепенно становится важной частью энергетики. В качестве основной части возбуждения ветроэнергетического генератора с постоянными магнитами используется спеченный неодимовый магнит в ветроэнергетических генераторах с постоянным магнитом мощностью 1 и 2 кВт с прямым приводом около 0. 67 тонны и 1.00 тонны соответственно.
67 тонны и 1.00 тонны соответственно.
Постоянный магнит широко используется в транспортной сфере, в том числе в транспортных средствах на новой энергии, электрических велосипедах, поездах на магнитной подушке и военных кораблях. Электромобиль и гибридный автомобиль привлекли к себе более пристальное внимание из-за загрязнения окружающей среды и потребления энергии, вызванного развитием автомобильного рынка.
В качестве основного потока транспортных средств на новой энергии гибридное транспортное средство устанавливает как традиционный источник тепловой энергии, так и источник электроэнергии, который состоит из батареи и электродвигателя. Системой питания можно гибко управлять, а топливный двигатель будет работать в оптимальном состоянии, что снижает расход топлива и выхлоп. Каждый гибридный автомобиль потребляет 1-3 килограмма. спеченный неодимовый магнит, а совокупный спрос на спеченный неодимовый магнит может достигнуть 4000 тонн из расчета на два миллиона в год.
В дополнение к основному двигателю в автомобиле также широко используются микромоторы, такие как сиденье с электроприводом, электрическое зеркало заднего вида, электронный люк на крыше и дворник.
Бытовая электроникаРазличные виды бытовой электроники стали неотъемлемой частью жизни и, следовательно, повышают индекс счастья современного человека. Есть три основных компонента, которые должны использовать неодимовые магниты в мобильном телефоне, включая вибрационный двигатель, громкоговоритель и систему автофокусировки, соответствующее потребление неодимового магнита более 4500 тонн в год. Для жесткого диска (HDD), еще одного гиганта, использующего постоянные магниты, потребление спеченного неодимового магнита (VCM) и связанного магнита (двигатель шпинделя) в 6300 году достигло 1300 тонн и 2011 тонн соответственно. Двигатель с постоянным магнитом с высокопроизводительным неодимовым магнитом также способствует развитию электроинструментов, холодильников и компрессоров кондиционеров.
Промышленная автоматизация относится к машинному оборудованию, которое автоматически работает и производит в соответствии с предполагаемой целью без ручного вмешательства, и представляет собой комплексную технологию, которая включает механику, микроэлектронику, машинное зрение и информатику. Автоматизация всегда способствует промышленному прогрессу и широко применяется в машиностроении, электроэнергетике и информационных технологиях, поэтому стала основным путем повышения эффективности производства и единообразия продукции, а также одновременного сокращения материальных отходов и потерь энергии.
Для достижения промышленной автоматизации используются различные виды промышленных роботов, которые заменяют человеческий труд. Подвижный сустав — самая необходимая часть робота. Перемещение шарнира будет приводиться в движение шаговым двигателем и серводвигателем, что повысит требования к высокопроизводительным постоянным магнитам.
Электромеханика: Электродвигатели Parker Hannifin | VSP-Co.org
Электродвигатели Parker Hannifin
Электродвигатели Parker Hannifin представлены двигателями постоянного тока, коллекторныыми двигателями с постоянными магнитами, и двигателями переменного тока, синхронными и асинхронными с короткозамкнутым ротором.
Синхронные двигатели
Серия GVM
Двигатели GVM являются синхронными серводвигателями переменного тока на постоянных магнитах. Достаточно большая величина крутящего момента, быстродействие и эффективность двигателей Parker Hannifin серии GVM обеспечивают требуемые условия для достижения впечатляющих рабочих характеристик во множестве платформ транспортных средств. Данные двигатели достаточно широко применяются в мотоциклах, скутерах, малотоннажных грузовиках, а также в электрогидравлических насосах.
Одним из знаковых применений двигателей серии GVM является использование в мотоциклах-прототипах фирмы Victory в гонке 2015 года на острове Мэн.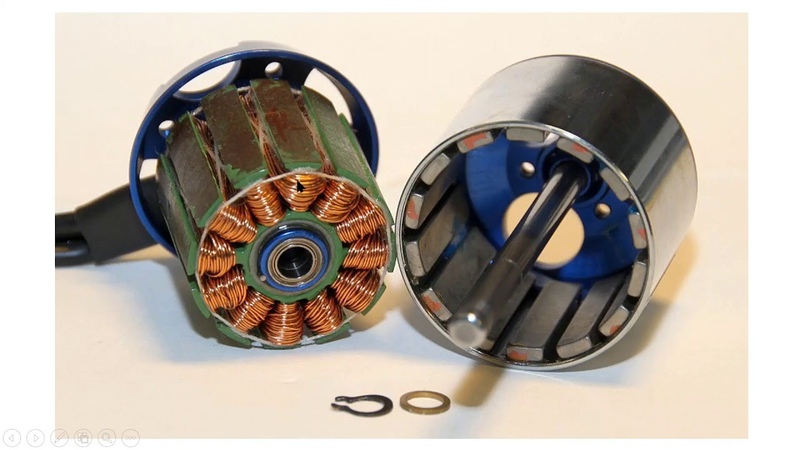 Гонка на острове Мэн — самая длинная гонка для электромотоциклов в мире.
Гонка на острове Мэн — самая длинная гонка для электромотоциклов в мире.
Двигатель Parker Hannifin серии GVM выдерживает очень высокие средние скорости порядка 200 км/ч
и обеспечивает длительную беспрерывную работу
в экстремальных температурных условиях.
Питание: 24 — 800 В DC.
Тип: синхронный, с редкоземельными магнитами.
Количество полюсов: 12.
Крутящий момент: до 376 Н·м.
Номинальная мощность: до 170 кВт.
Частота вращения: до 9800 Об/мин.
Обратная связь: резольвер, SinCos энкодер, бессенсорный.
Типоразмер: 142, 210.
Исполнение: IP67, IP6K9K (опц.).
Особенности: Отличное решения для мобильных приложений (электрокары, электромотоциклы и т.д.).
Серия NV
Серия NV — синхронные двигатели с постоянными магнитами разработанные для высокоскоростных приложений. Высокая точность, низкий уровень вибрации и долгий срок службы обеспечивают работу при максимальной скорости вращения до 17000 об/мин. Уровень защиты корпуса: IP64, IP65, IP67 (по запросу).
Уровень защиты корпуса: IP64, IP65, IP67 (по запросу).
Питание: 230, 400-480 В AC.
Тип: синхронный, с постоянными магнитами.
Количество полюсов: 10.
Крутящий момент: 0,4 — 11,5 Нм.
Номинальная мощность: 0,7 — 11 кВт.
Частота вращения: 7000 — 17000 Об/мин.
Обратная связь: резольвер, абс. энкодер (EnDat, Hiperface), бессенсорный.
Типоразмер: 60, 80, 110, 130.
Исполнение: IP64, IP65 (опц.).
Особенности: Подходят для высокоскоростных приложений.
Серия SMB/H/E, MB/H/E, NX
Серии двигателей SMB/H/E, MB/H/E, NX представляют линейку синхронных двигателей с постоянными или редкоземельными магнитами.
Благодаря инновационной технологии «Salient Pole» (использование неодимового магнита — мощного постоянного магнита, состоящего из сплава редкоземельного элемента неодима, бора и железа) двигатели серии SMB/H/E, MB/H/E достигают высоких ускорений и выдерживают большие перегрузки без риска размагничивания или отрыва магнита. Совместимы со следующими сериями приводов: SLVD-N, TPD-M, HiDrive, ViX, TWIN-N/SPD-N.
Совместимы со следующими сериями приводов: SLVD-N, TPD-M, HiDrive, ViX, TWIN-N/SPD-N.
Двигатели серии NX — компактные, с низкой пульсацией момента и плавным ходом, являются эффективной альтернативой традиционным индукционным двигателям. Бессенсорная версия двигателя была разработана в качестве альтернативного решения для минимизации затрат в сочетании с приводом Parker Hannifin AC650S.
Питание: 230, 400 — 480 В AC.
Тип: синхронный, с постоянными / редкоземельными магнитами.
Количество полюсов: 4 — 10.
Крутящий момент: 0,35 — 269 Нм.
Номинальная мощность: 0,2 — 67 кВт.
Частота вращения: 0 — 10000 Об/мин.
Обратная связь: резольвер, абс. энкодер (EnDat, Hiperface), инк. энкодер.
Типоразмер: 40, 42, 56, 60, 70, 82, 92, 100, 105, 115, 120, 142, 145, 155,170, 205, 265.
Исполнение: IP44, IP64, IP65, IP67.
Особенности: Компактные с низкой пульсацией момента и плавным ходом.
Серия AC M2n
Серия AC M2n — компактные синхронные электродвигатели для приложений, требующих быстрого ускорения. Благодаря использованию высокоэффективных магнитных материалов и тщательно оптимизированной конструкции ротора, двигатели обладают низким моментом инерции, а стабильность магнитов позволяет использовать максимальные токи четырехкратно превышающие номинальные. В качестве датчика обратной связи двигатели используют встроенный в конструкцию револьвер.
Питание: 230, 400 — 480 В AC.
Тип: синхронный, с постоянными магнитами.
Количество полюсов: 6.
Крутящий момент: 0,13 — 34 Нм.
Номинальная мощность: 0,04 — 8,37 кВт.
Частота вращения: 4000 — 6000 Об/мин.
Обратная связь: резольвер.
Типоразмер: 40, 55, 88, 105, 145.
Исполнение: IP45, IP65.
Особенности: Компактные с низкой инерцией.
Серия NK
Серия NK — встраиваемые компактные бескорпусные синхронные электродвигатели с постоянными магнитами для высокоскоростных приложений, обеспечивают работу при максимальной скорости вращения до 15000 об/мин.
Питание: 230, 400 — 480 В AC.
Тип: бескорпусной синхронный, с постоянными магнитами.
Количество полюсов: 10.
Крутящий момент: 0,4 — 90 Нм.
Номинальная мощность: 0,2 — 34 кВт.
Частота вращения: 1000 — 15000 Об/мин.
Обратная связь: резольвер, абс. энкодер (EnDat, Hiperface), бессенсорный.
Типоразмер: 42, 56, 62, 80, 110, 143.
Исполнение: IP00.
Особенности: Встраиваемые, компактные, для высокоскоростных приложений.
Серия TM/TK
Серии синхронных двигателей с постоянными магнитами TM/TK обладают высокой прочностью и обеспечивают работу в жестких условиях. Высокий крутящий момент на малых оборотах предоставляет пользователю решение для следующих приложений: прессы, миксеры, намоточные машины, экструдеры. Серия TM имеет бескорпусное исполнение.
Питание: 400 — 480 В AC.
Тип: синхронный, с постоянными магнитами / +бескорпусной.
Количество полюсов: 24 — 120.
Крутящий момент: 90 — 22100 Нм.
Номинальная мощность: 6,9 — 394 кВт.
Частота вращения: 29 — 2500 Об/мин.
Обратная связь: Endat энкодер, бессенсорный, резольвер (опц.).
Типоразмер, мм: 398, 600, 830 / 230, 385, 565, 795.
Исполнение: IP54 / IP00.
Особенности: Высокий крутящий момент на малых оборотах, для прессов, миксеров, намоточных машин, экструдеров.
Серия HKW/SKW
Серия HKW/SKW — бескорпусные синхронные электродвигатели с постоянными магнитами для высокоскоростных приложений мощностью до 230 кВт. Электродвигатели используются в приложениях, где высокий крутящий момент на низкой скорости и высокая скорость при постоянной мощности являются критичными характеристиками.
Питание: 400 — 480 В AC.
Тип: бескорпусной синхронный, с постоянными магнитами.
Количество полюсов: 4 — 16.
Крутящий момент: 3,5 — 1250 Нм.
Номинальная мощность: 2,0 — 230 кВт.
Частота вращения: 260 — 23200 Об/мин.
Обратная связь: бессенсорный, резольвер (опц.).
Типоразмер: 73, 82, 85, 91, 96, 108, 155.5, 195, 242, 310.
Исполнение: IP00.
Особенности: Встраиваемые, решения для высокоскоростных приложений.
Серия MGV
Синхронный двигатель MGV на постоянных магнитах обеспечивает работу при максимальной скорости вращения до 45000 об/мин, используется во многих компонентах автомобильных или авиационных испытательных установок.
Питание: 400 — 480 В AC.
Тип: синхронный, на постоянных магнитах.
Количество полюсов: 4 — 16.
Крутящий момент: 6,8 — 1500 Нм.
Номинальная мощность: 15 — 500 кВт.
Частота вращения: 5000 — 45000 Об/мин.
Обратная связь: резольвер.
Типоразмер: 430, 635, 840, 860, 950, 966, A50, B40, B50.
Исполнение: IP40.
Особенности: Для высокоскоростных приложений тестовых стендов.
Серия EX/EY
Синхронные электродвигатели EX/EY с постоянными магнитами обеспечивают работу в Зоне 2 при окружающей температуре от 40 ºC до 60 º. Оборудование соответствует стандартам ATEX, IECEx (Зона 1, 2).
Питание: 230, 400-480 В AC.
Тип: синхронный, с постоянными магнитами.
Количество полюсов: 10.
Крутящий момент: 1,75 — 41 Нм.
Номинальная мощность: до 6,3 кВт.
Частота вращения: 0 — 7600 Об/мин.
Обратная связь: резольвер, энкодер (опц.) (EnDat, Hiperface), бессенсорный.
Типоразмер:, 70, 92, 120, 121, 155.
Исполнение: IP64, IP65.
Особенности: ATEX, IECEx (зона 1, 2).
Коллекторные двигатели. Серия RS, RX / AXEM
Сервомоторы серии RS — малоинерционные двигатели с магнитом из редкоземельных металлов.
Серия RX представляет собой высокоинерционные двигатели с ферритовым магнитом, которые демонстрируют высокие характеристики при работе на холостом ходу.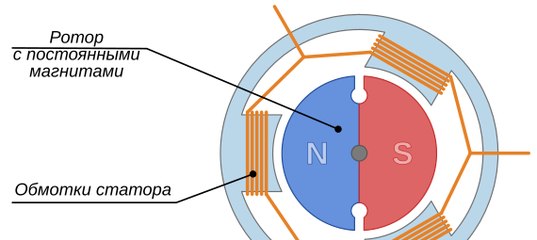 Двигатель RX является экономически эффективным решением для различных серво-приложений. Серия RX также обеспечивает работу маломощных систем в Чистых помещениях.
Двигатель RX является экономически эффективным решением для различных серво-приложений. Серия RX также обеспечивает работу маломощных систем в Чистых помещениях.
Сервомоторы RS/RX постоянного тока в сочетании с приводами серии RTS полностью подходят для применений, где требуется компактное решение или высокий динамический уровень.
Двигатели серии AXEM являются одними из самых распространенных серводвигателей во всем мире — парк установленного оборудования насчитывает более 2 000 000 единиц. Сервомотор обеспечивает высокую динамику и управление на низкой скорости, а также работу без шума и вибраций. Надежное и эффективное решение с низкими эксплуатационными расходами.
Питание: 14 — 178 В DC.
Тип: коллекторный с редкоземельными магнитами / с плоским ротором.
Количество полюсов: 4 / нет.
Крутящий момент: 0,05 — 19,2 Нм.
Номинальный ток: 1,5 — 28 А.
Частота вращения: 2000 — 4800 Об/мин.
Обратная связь: тахогенератор, энкодер, резольвер.
Типоразмер: 39, 52, 58, 68, 83, 84, 97, 100, 110, 120, 140, 160, 211, 278.
Исполнение: IP20, IP40, IP54.
Особенности: Отличное управление на низкой скорости вращения, компактность, для медицинских приложений.
Новосибирские инженеры создали уникальный двигатель — Российская газета
Ученые Новосибирского государственного технического университета (НГТУ) разработали электродвигатель, превосходящий аналогичные машины по основным параметрам: он более компактный и надежный, его коэффициент полезного действия 90 процентов, что на 10-20 процентов выше, чем у современных моторов. Кроме того, он имеет массу и габариты в 2-3 раза меньше при сопоставимой стоимости.
Называется эта электрическая машина — «бесконтактный, синхронный двигатель с постоянными магнитами». Его можно использовать везде, где работают двигатели постоянного тока, а это широчайшая сфера применения. По словам разработчиков, он сочетает в себе надежность машин переменного тока с хорошей управляемостью двигателей постоянного тока.
КПД нового двигателя 90 процентов, на 10-20 процентов выше, чем у аналогов
В конструкции применен целый ряд ноу-хау. Авторы особо подчеркивают, что удалось избавиться от скользящих контактов, которые могут искрить и стать причиной многих проблем. «Наш двигатель работает от источника постоянного тока, но в обмотку статора поступает уже переменный ток, — объясняет заведующий кафедрой электромеханики НГТУ Александр Шевченко. — Специальный датчик передает в систему управления сигнал о положении ротора и в зависимости от этого формируется нужный ток в обмотке. Таким образом, мы полностью избавились от скользящих контактов».
Подчеркнем, что разработка уже вышла из стен института и испытывается в «полевых» условиях. Например, он установлен на новом рудничном электровозе, который разработан на Тульском заводе горно-шахтного оборудования. Работа в шахте предъявляет к оборудованию повышенные требования по безопасности, ведь малейшая искра может вызвать взрыв метана. У нового бесконтактного мотора в принципе нет этого недостатка. А в целом разработки сибирских инженеров позволили сконструировать электровоз, который будет перевозить в шахтах в полтора раза больше груза, чем существующие машины.
А в целом разработки сибирских инженеров позволили сконструировать электровоз, который будет перевозить в шахтах в полтора раза больше груза, чем существующие машины.
Работают сибирские электромоторы и в важнейшей для страны отрасли — нефтедобывающей. На их основе конструируют погружные насосы для низкодебитных скважин, где «сливки» уже сняли, но нефти под землей еще немало. Здесь нужны надежные моторы, дающие 300-500 оборотов в минуту, способные работать на глубине 2-3 км при высоком давлении и температуре 120 С. И с этим новый двигатель успешно справляется.
Кроме того, Калужский электромеханический завод запускает сибирские двигатели в серию для систем вентиляции, подъемных механизмов лифтов.
Впрочем, одними электродвигателями сибиряки не ограничиваются. В ближайших планах — разработка генераторов с повышенным КПД, ведь созданную машину можно использовать и в обратную сторону — для выработки электричества.
ПОСТОЯННЫЕ МАГНИТНЫЕ МОТОРЫ с фиксированной или переменной скоростью
Электровигатели С Постоянными Магнитами: Лучшие По Эффективности И Производительности.
Двигатели с постоянными магнитами серии OMPM, разработанные и изготовленные OME Motors, являются лучшей моделью по эффективности, мощности и размерам среди доступных на рынке. Это специальные синхронные электродвигатели с магнитными стержнями, добавленными к ротору, которые увеличивают тягу и делают двигатели более эффективными с точки зрения производительности и минимум энергозатрат. Поэтому двигатели с постоянными магнитами — более мощные, чем общепромышленные низковольтные электродвигатели IE4: фактически, при той же мощности, двигатели серии OMPM имеют меньшие габариты и более высокий уровень эффективности. Кроме того, благодаря их малому весу и малому объему, синхронные двигатели с постоянными магнитами экономят пространство, компрессируя высокую мощность в уменьшенный габарит электроустройства.
Двигатели с постоянными магнитами, разработанные и изготовленные OME Motors под заказ, управляются и работают с преобразователем частоты, который гарантирует постоянный крутящий момент в широком диапазоне скоростей, работая даже на самых низких уровнях скорости с отличной эффективностью. Поэтому этот тип двигателей также можно считать электродвигателями постоянного тока с постоянными магнитами.
Поэтому этот тип двигателей также можно считать электродвигателями постоянного тока с постоянными магнитами.
Высокий Уровень Эффективности И Максимальные Преимущества: Узнайте Больше Об Электродвигателях на Постоянных Магнитах.
Электродвигатели постоянного тока на постоянных магнитах способны обеспечить максимальную мощность в уменьшенном габарите. В частности, они имеют следующие преимущества:
- Высокий уровень технологий.
- Высокая мощность и эффективность с точки зрения производительности и энергопотребления (каждый электродвигатель с постоянными магнитами).
- Высокая плотность мощности для используемого габарита.
- Длительный срок службы, устойчивость и надежность с течением времени.
- Уменьшенный вес и объем для компактного дизайна.
- Всевозможные монтажные исполнения и взаимозаменяемость, гарантируемая конструкцией каждого двигателя на постоянных магнитах.
- Меньшая потеря энергии и температуры благодаря высокой эффективности электродвигателей с постоянными магнитами.

- Переменная скорость.
- Точный контроль и работа при низких температурах, также на низких скоростях.
- Низкий уровень шума.
Синхронные Двигатели С Постоянными Магнитами: Максимальная Производительность Для Каждого Типа Промышленного Применения.
Благодаря своим передовым и инновационным функциям, электродвигатели с постоянными магнитами, разработанные и изготовленные OME Motors, идеально подходят для самых разных промышленных областей применения. В целом, эти двигатели, с характеристиками высочайшего ранга и максимальной эффективностью, могут использоваться во всех промышленных применениях, которые требуют изменение скорости и постоянного крутящего момента даже на низких скоростях. В частности, синхронные двигатели с постоянными магнитами могут использоваться на электростанциях, системах очистки, системах опреснения воды, в очистных сооружений, а также в пищевой промышленности. Эти электродвигатели эффективно работают в сочетании с насосами, компрессорами, дробилками и измельчителями, вентиляторами и воздуходувками, конвейерными лентами, системами отопления, вентиляции и кондиционирования воздуха (HVAC).
— двигатели постоянного тока с сервоприводом под маркой DirectPower ™
Электродвигатели с постоянным магнитомElectroCraft Brush обеспечивают надежность варианты по относительно невысокой стоимости. Где нужны надежность и мощность линейка ElectroCraft PMDC с различными вариантами напряжения идеальное сочетание управления движением.Узнать больше & rtrif;
Якорь с динамической балансировкой и бесконтактные шарикоподшипники обеспечивают надежную
плавная работа. Прочная полностью закрытая невентилируемая конструкция
(TENV) и сменные щетки помогают продлить жизненный цикл продукта.И для
дополнительная мощность и надежность выбирают наши двигатели DirectPower Plus. В
Семейство ElectroCraft PMDC используется в автомобилестроении, сельском хозяйстве, медицине,
мобильность и другие коммерческие рынки.
В
Семейство ElectroCraft PMDC используется в автомобилестроении, сельском хозяйстве, медицине,
мобильность и другие коммерческие рынки.
Стандартные функции включают шарикоподшипники, высокопроизводительные щеточные карты, цинковые литые под давлением торцевые крышки, прочная черная окраска, все с рабочим напряжением от 12 до 60 В постоянного тока.Дополнительные механические конфигурации, вал конструкции и варианты намотки доступны для настройки двигателя в соответствии с специфические требования заказчика.
Наша команда инженеров готова помочь вам выбрать решение PMDC
который лучше всего подходит для вашего проекта.
Свяжитесь с нами сегодня, и мы поможем продвинуть ваши инновации.
Двигатели постоянного тока с постоянным магнитом | Двигатели переменного и постоянного тока | Двигатели Тормоза и органы управления | Закрытые зубчатые передачи и двигатели
Характеристики продукта
- Доступны от 1/6 до 5 л.с.
- TENV без вентиляции и TEFC с вентиляторным охлаждением
- Диапазон скоростей 50: 1 Регулировка угла наклона
- Двигатели постоянного тока 90 В и 180 В постоянного тока
- Высокий пусковой крутящий момент
Лист технических данных
Нажмите на изображение ниже, чтобы загрузить pdf.
 Чтобы заказать печатные экземпляры литературы, нажмите здесь.
Чтобы заказать печатные экземпляры литературы, нажмите здесь.
Каталог продукции
Связанная литература
Предотвращение повреждения коробки передач за счет правильной установки двигателя
Применение двигателей с постоянным постоянным током | Конструкция машины
Двигатели постоянного тока с постоянным магнитом используются в самых разных областях, от устройств с батарейным питанием, таких как инвалидные коляски и электроинструменты, до конвейеров и устройств открывания дверей, сварочного оборудования, рентгеновских и томографических систем, насосного оборудования и многих других. .Они часто являются лучшим решением для приложений управления движением и передачи энергии, где важны компактный размер, широкий диапазон рабочих скоростей, способность адаптироваться к ряду источников питания или соображения безопасности при низком напряжении. Их способность создавать высокий крутящий момент на низкой скорости делает их подходящими заменителями мотор-редукторов во многих областях применения. Из-за их линейной кривой скорость-крутящий момент они особенно подходят для приложений с регулируемой скоростью и сервоуправлением, где двигатель будет работать со скоростью менее 5000 об / мин
.Они часто являются лучшим решением для приложений управления движением и передачи энергии, где важны компактный размер, широкий диапазон рабочих скоростей, способность адаптироваться к ряду источников питания или соображения безопасности при низком напряжении. Их способность создавать высокий крутящий момент на низкой скорости делает их подходящими заменителями мотор-редукторов во многих областях применения. Из-за их линейной кривой скорость-крутящий момент они особенно подходят для приложений с регулируемой скоростью и сервоуправлением, где двигатель будет работать со скоростью менее 5000 об / мин
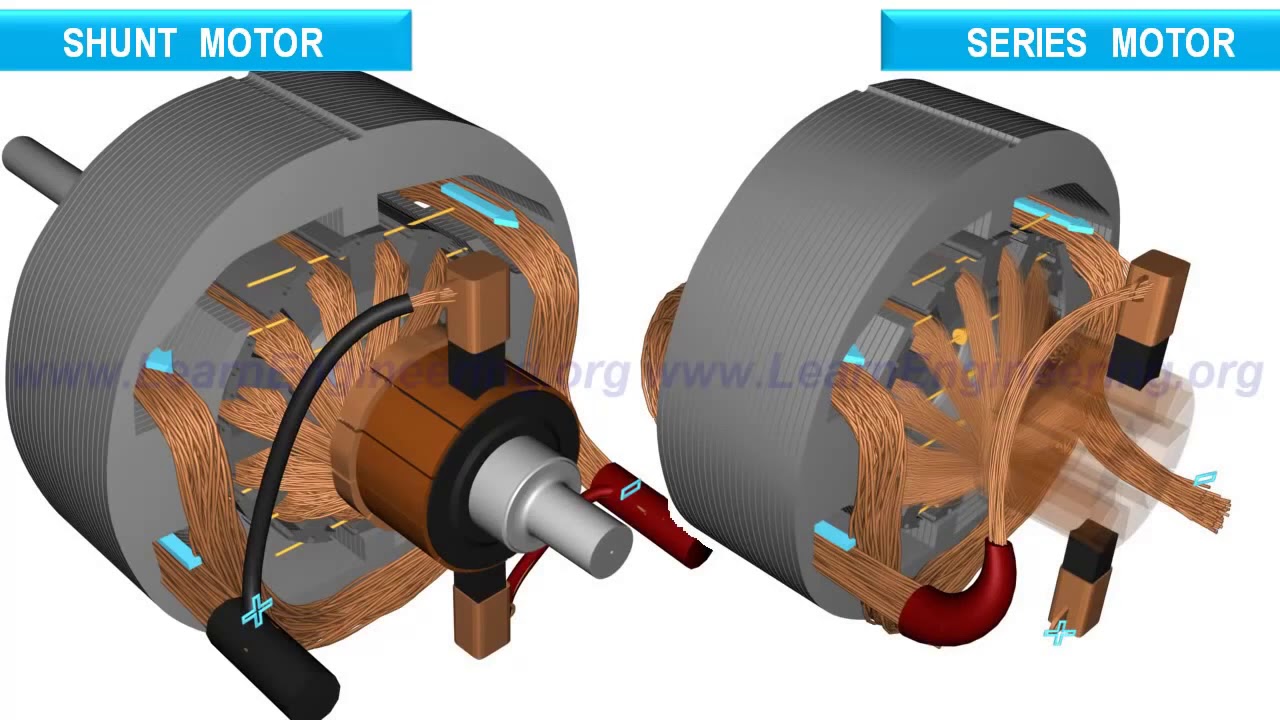
Внутри этих двигателей постоянные магниты, прикрепленные к кольцу возврата магнитного потока, заменяют обмотки возбуждения статора в шунтирующих двигателях.Двигатель завершается системой коммутации намотанного якоря и механической щетки.
Постоянные магниты обеспечивают поток окружающего поля, устраняя необходимость во внешнем токе поля. Такая конструкция позволяет получить более компактный, легкий и энергоэффективный двигатель.
Взаимодействие якоря
В отличие от двигателя постоянного тока с шунтирующей обмоткой, двигатель с постоянными магнитами не взаимодействует между полем постоянного магнита и размагничивающим поперечным полем якоря. Двигатели постоянного тока с шунтовой обмоткой испытывают значительное взаимодействие между якорем и статором.Железный сердечник статора с низким сопротивлением (высокой проницаемостью) в конечном итоге ослабляет поле при увеличении нагрузки. Результатом является резкое падение характеристик крутящего момента в какой-то момент.
Поле двигателя с постоянными магнитами имеет высокое сопротивление (низкая магнитная проницаемость), что исключает значительное взаимодействие якоря. Это высокое сопротивление обеспечивает постоянное поле, позволяя линейную работу двигателя во всем диапазоне скорости-момента. При работе с постоянным напряжением якоря по мере уменьшения скорости доступный крутящий момент увеличивается, рисунок 1.По мере увеличения приложенного напряжения якоря линейные кривые скорость-крутящий момент смещаются вверх. Таким образом, серия параллельных кривых скорость-крутящий момент для различных напряжений якоря представляет характеристики скорость-крутящий момент двигателя с постоянными магнитами (рис. 2). Скорость пропорциональна напряжению, а крутящий момент пропорционален току.
Таким образом, серия параллельных кривых скорость-крутящий момент для различных напряжений якоря представляет характеристики скорость-крутящий момент двигателя с постоянными магнитами (рис. 2). Скорость пропорциональна напряжению, а крутящий момент пропорционален току.
Способы регулирования скорости
Скорость регулируется изменением напряжения, подаваемого на якорь. Устройства обратной связи определяют скорость двигателя и отправляют эту информацию в систему управления, чтобы изменить его выходное напряжение вверх или вниз, чтобы поддерживать скорость на уровне или около установленного значения.К методам обратной связи относятся тахометры напряжения, оптические энкодеры, генераторы электромагнитных импульсов и мониторинг обратной ЭДС.
Регулирование — это способность двигателя и системы управления поддерживать постоянную скорость во всем диапазоне крутящего момента. Он простирается от 0,1% для оптических энкодеров с высокой степенью разделения (например, 1000 дел / оборот) до 5% для простой системы обратной ЭДС. Большинство производителей предоставляют данные сервоконстант для прогнозирования реакции системы.
Большинство производителей предоставляют данные сервоконстант для прогнозирования реакции системы.
Форм-фактор
На практике напряжение, используемое для питания двигателя с постоянными магнитами, не является чистым постоянным током.Это производное напряжение постоянного тока, образованное путем выпрямления переменного напряжения. Таким образом, напряжение привода постоянного тока имеет волновую или пульсационную составляющую, которая связана с частотой входного переменного тока.
Форм-фактор, который представляет собой отношение I rms к I dc , указывает, насколько близко управляющее напряжение к чистому постоянному току. По определению, форм-фактор для чистого источника постоянного тока, такого как батарея, равен 1,0. Для источника питания, чем выше коэффициент формы выше 1.0, тем больше он отклоняется от чистого постоянного тока. В таблице A показаны типичные форм-факторы для часто используемых источников напряжения.
Большинство производителей двигателей с постоянным постоянным током рекомендуют использовать форм-фактор не более 1,4 для непрерывной работы. Полуволновое выпрямление также не рекомендуется , потому что это увеличивает форм-фактор.
Полуволновое выпрямление также не рекомендуется , потому что это увеличивает форм-фактор.
Использование двигателя с более высоким контролем форм-фактора, чем предполагалось, может привести к преждевременному выходу из строя щетки и чрезмерному внутреннему нагреву. Если вы используете элемент управления с высоким форм-фактором, вам могут потребоваться специальные щетки и коммутаторы, система высокотемпературной изоляции или более мощный двигатель.Это может стоить дороже, но элемент управления, уменьшающий форм-фактор, может снизить тепловые эффекты в двигателе.
Поскольку в двигателях с постоянными магнитами отсутствует взаимодействие якоря, они могут создавать высокие мгновенные пусковые моменты и моменты ускорения, обычно в 10–12 раз превышающие номинальный крутящий момент. Таким образом, они подходят для приложений, требующих высоких пусковых моментов или мгновенных всплесков мощности. Однако они не предназначены для непрерывной работы при высоких уровнях крутящего момента, которые они могут создать.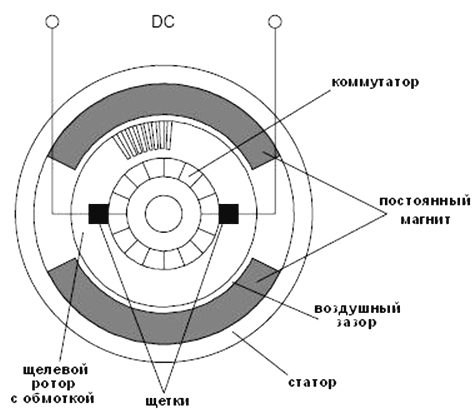 Это может вызвать перегрев, что может привести к необратимому размагничиванию полевых магнитов.
Это может вызвать перегрев, что может привести к необратимому размагничиванию полевых магнитов.
Функция ограничения крутящего момента (тока) в системе управления приводом ограничивает условия остановки, реверсирование штекера и потребление тока, особенно в периоды высокого крутящего момента, и защищает от вредной перегрузки. (Переключение вилки в обратном направлении не рекомендуется, поскольку при этом якорь подвергается действию более высокого напряжения, чем номинальное). Помимо предотвращения перегрева двигателя, ограничитель тока может помочь защитить приводимое оборудование от чрезмерных крутящих моментов двигателя.
Перманентные магниты
Для постоянных магнитов доступен ряд магнитных материалов.К ним относятся керамические ориентированные ферриты, редкоземельные постоянные магниты и Alnico, хотя использование Alnico сокращается. В таблице B сравниваются эти обычно используемые материалы.
Керамические ориентированные ферриты, обычно сделанные из бария или стронция, превращаются в продукты с более низким энергопотреблением, чем у Alnico. Поэтому они стали предпочтительным материалом для большинства двигателей с постоянными магнитами, заменив Alnico, из-за их большей устойчивости к размагничиванию, простоты формования и низкой стоимости.
Поэтому они стали предпочтительным материалом для большинства двигателей с постоянными магнитами, заменив Alnico, из-за их большей устойчивости к размагничиванию, простоты формования и низкой стоимости.
Редкоземельные магниты могут позволить инженерам выбрать двигатель с постоянными магнитами уменьшенного размера или повысить его номинальную мощность.Они включают самарийкобальт и недавно разработанный неодим-железо-бор. Их характеристики по сравнению с ранее упомянутыми материалами включают высокую энергию и низкую подверженность размагничиванию. Однако стоимость этих материалов остается высокой.
Выбор материала зависит от требований приложения. Производитель двигателя может оказать помощь в выборе.
Кисти
В двигателях PMDC используется механическая схема коммутации для переключения тока на обмотку якоря.Штанги коммутатора подключаются к обмоткам якоря. Пара подпружиненных щеток механически контактирует со стержнями коллектора, передавая ток на якорь. Таким образом, щетки соединяют источник питания с обмотками возбуждения якоря. Коммутатор якоря и щетки действуют как поворотный переключатель для подачи питания на обмотки.
Таким образом, щетки соединяют источник питания с обмотками возбуждения якоря. Коммутатор якоря и щетки действуют как поворотный переключатель для подачи питания на обмотки.
Дизайн и подбор кистей имеют тенденцию к черному искусству. Идеальная щетка обеспечивает низкие потери напряжения, незначительное образование пыли, отсутствие дуги, небольшой износ коллектора и низкий уровень шума.Во многих случаях эти требования противоречивы, что приводит к компромиссу при выборе кисти.
При низком подаваемом напряжении падение напряжения на щетках является основным фактором при выборе щетки. При более высоких напряжениях падение напряжения на щетке менее важно. Другие параметры, такие как рабочая скорость, абразивность, смазывающая способность и стоимость, становятся доминирующими.
Обычно используемые щеточные материалы включают углерод и угольный графит, графит, электрографит и металл-графит.В таблице C сравниваются эти материалы для кистей.
Металлические графитовые щетки состоят из смеси меди или серебра с графитом. У них низкие потери напряжения и высокая скорость износа, что ограничивает их использование низкоскоростными двигателями с низким напряжением.
У них низкие потери напряжения и высокая скорость износа, что ограничивает их использование низкоскоростными двигателями с низким напряжением.
Угольные и угольно-графитовые щетки имеют низкую токовую нагрузку, относительно высокое падение напряжения на щетке и имеют тенденцию к абразивному воздействию. Эти свойства ограничивают их использование низкоскоростными двигателями высокого напряжения и малой мощностью.
В электрографитовых щетках используется форма графита, образованная из углерода, подвергающегося сильному нагреву.Они обладают высокой токовой нагрузкой, относительно умеренным падением напряжения и низкими абразивными свойствами. Они подходят для высокоскоростных, высоковольтных и мощных двигателей.
Щетки из натурального графита имеют немного меньшую допустимую нагрузку по току, чем электрографитовые щетки. Они, как правило, обладают более сильным полирующим действием, чем электрографит, имеют низкие характеристики трения и присущую им мягкость. Они подходят для приложений, где важны высокая скорость работы и бесшумность. Однако их мягкость, которая обеспечивает бесшумную работу, также ограничивает срок службы щеток.
Однако их мягкость, которая обеспечивает бесшумную работу, также ограничивает срок службы щеток.
На срок службы и производительность щетки также влияют другие факторы, включая температуру, влажность, высоту, давление пружины, форм-фактор регулятора, размер и рабочий цикл.
Если давление пружины слишком низкое, может возникнуть чрезмерный электрический износ. Если он будет слишком высоким, может возникнуть чрезмерный механический износ. Как показано на рисунке 3, срок службы щетки можно представить в виде кривой в форме ванны. Оптимальный диапазон давления пружины для минимального износа находится между областями высокого электрического и механического износа.
Низкая влажность, высокая температура или высокогорье может не содержать достаточно влаги для образования необходимой смазочной пленки между щеткой и штоком коллектора.Решить проблему могут специальные щетки, пропитанные смазкой.
В условиях небольшой нагрузки низкий ток потребления может вызвать плохую смазку коллектора. Часто это приводит к загрязнению коммутатора и неравномерной коммутации. Чтобы исправить это, используйте либо щетки, пропитанные смазкой, либо уменьшите площадь поперечного сечения щетки для правильной коммутации.
Часто это приводит к загрязнению коммутатора и неравномерной коммутации. Чтобы исправить это, используйте либо щетки, пропитанные смазкой, либо уменьшите площадь поперечного сечения щетки для правильной коммутации.
В целом, выбор подходящего материала щеток зависит от области применения и лучше всего делать с рекомендациями производителя двигателя, у которого обычно есть тысячи часов данных испытаний щеток.
Другие соображения при выборе двигателя с постоянным током постоянного тока включают правильный выбор корпуса и системы электрической изоляции. Если факторы безопасности диктуют полностью закрытый двигатель, он может быть невентилируемым (TENV) или охлаждаемым вентилятором (TEFC). (Подробное обсуждение безопасности см. В PTD, «Взрывозащищенные двигатели для приводов с регулируемой скоростью», 9/1991, стр. 35.) Системы электрической изоляции, таблица D, испытываются в течение 20 000 часов при номинальной температуре без ухудшения характеристик. (как признано UL, CSA, BSI и VDE). Вычтите температуру окружающей среды (обычно 25 или 40 ° C), чтобы определить допустимое повышение. Вы можете рассчитать температуру окружающей среды, если знаете рабочую нагрузку, КПД двигателя и коэффициент теплового повышения. Ищите регулятор с функцией линейного изменения, чтобы избежать работы при очень низких температурах.
Вычтите температуру окружающей среды (обычно 25 или 40 ° C), чтобы определить допустимое повышение. Вы можете рассчитать температуру окружающей среды, если знаете рабочую нагрузку, КПД двигателя и коэффициент теплового повышения. Ищите регулятор с функцией линейного изменения, чтобы избежать работы при очень низких температурах.
Рональд Баллок — президент корпорации Bison Gear & Engineering Corp., Даунерс-Гроув, Иллинойс.
Все о двигателях с постоянными магнитами
Электродвигатель позволяет создавать движение с помощью электричества.Это разнообразный класс машин, которые обеспечивают питание для огромного количества приложений и в настоящее время управляют автоматизацией, производством, коммерческими продуктами и т. Д. Универсальность этих двигателей обусловлена наличием многих типов электродвигателей, и в этой статье будет рассмотрена многообещающая конструкция — двигатель с постоянными магнитами. Первоначально разработанный на ранней стадии, этот двигатель быстро становится эффективной альтернативой отраслевым стандартам благодаря достижениям 21 века. Этот двигатель, его принципы работы и его применение будут исследованы в этом обсуждении и покажут, почему этот двигатель привлек столько внимания в последние годы.
Этот двигатель, его принципы работы и его применение будут исследованы в этом обсуждении и покажут, почему этот двигатель привлек столько внимания в последние годы.
Что такое двигатели с постоянными магнитами?
Двигатели с постоянными магнитами — это усовершенствованные двигатели, по конструкции похожие как на асинхронные, так и на серводвигатели (дополнительную информацию об этих двух конструкциях можно найти в наших статьях, посвященных асинхронным двигателям и серводвигателям). Они состоят из статора — внешнего корпуса — и ротора — подвижного компонента, соединенного с выходным валом двигателя. Как и другие двигатели переменного тока, двигатель с постоянными магнитами использует физику электромагнетизма для создания крутящего момента, и они делают это с помощью постоянных магнитов (обычно редкоземельных магнитов), встроенных в их ротор.Эта конструкция отличается от большинства других электродвигателей, в которых ротор либо генерирует собственное магнитное поле за счет индукции, либо за счет использования источника постоянного тока, либо просто состоит из ферромагнитного металла. Магниты в двигателе с постоянными магнитами при правильном расположении по отношению к статору могут обеспечивать скорость, равную частоте тока возбуждения, и поэтому считаются синхронным двигателем (см. Нашу связанную статью о синхронных двигателях, чтобы узнать больше). Эти двигатели должны быть соединены с электронным компонентом, который сглаживает крутящий момент этого двигателя, и именно поэтому эти машины только недавно достигли своего успеха в качестве жизнеспособной конструкции.
Магниты в двигателе с постоянными магнитами при правильном расположении по отношению к статору могут обеспечивать скорость, равную частоте тока возбуждения, и поэтому считаются синхронным двигателем (см. Нашу связанную статью о синхронных двигателях, чтобы узнать больше). Эти двигатели должны быть соединены с электронным компонентом, который сглаживает крутящий момент этого двигателя, и именно поэтому эти машины только недавно достигли своего успеха в качестве жизнеспособной конструкции.
Как работают двигатели с постоянными магнитами?
Основная работа двигателя с постоянными магнитами такая же, как и у большинства электродвигателей; внешний статор удерживает обмотки катушек, питаемых от источника питания, а ротор свободно вращается за счет сил, передаваемых катушками статора. Многие из тех же основных принципов, что и для асинхронных двигателей, справедливы и для двигателей с постоянными магнитами, и дополнительную информацию можно найти в нашей статье об асинхронных двигателях.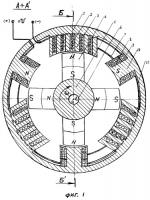 Это не означает, что это чисто машины переменного тока; фактически, большую часть своего срока службы они применялись как двигатели постоянного тока с постоянными магнитами (PMDCM) для небольших приложений.Однако мощность PMDCM довольно мала, и в этой статье основное внимание будет уделено двигателям переменного тока с постоянными магнитами (PMACM), поскольку они бывают больших размеров, предлагают большую мощность и могут сравниться с асинхронными двигателями с точки зрения прочности. , эффективность и количество использований.
Это не означает, что это чисто машины переменного тока; фактически, большую часть своего срока службы они применялись как двигатели постоянного тока с постоянными магнитами (PMDCM) для небольших приложений.Однако мощность PMDCM довольно мала, и в этой статье основное внимание будет уделено двигателям переменного тока с постоянными магнитами (PMACM), поскольку они бывают больших размеров, предлагают большую мощность и могут сравниться с асинхронными двигателями с точки зрения прочности. , эффективность и количество использований.
Отличительная особенность PMACM — постоянные магниты внутри их ротора — на них действует вращающееся магнитное поле (RMF) обмоток статора, и они отталкиваются во вращательное движение. Это отклонение от других роторов, где магнитная сила должна создаваться или создаваться в корпусе ротора, что требует большего тока.Это означает, что PMACM обычно более эффективны, чем асинхронные двигатели, поскольку магнитное поле ротора является постоянным и не требует источника энергии, используемого для его генерации.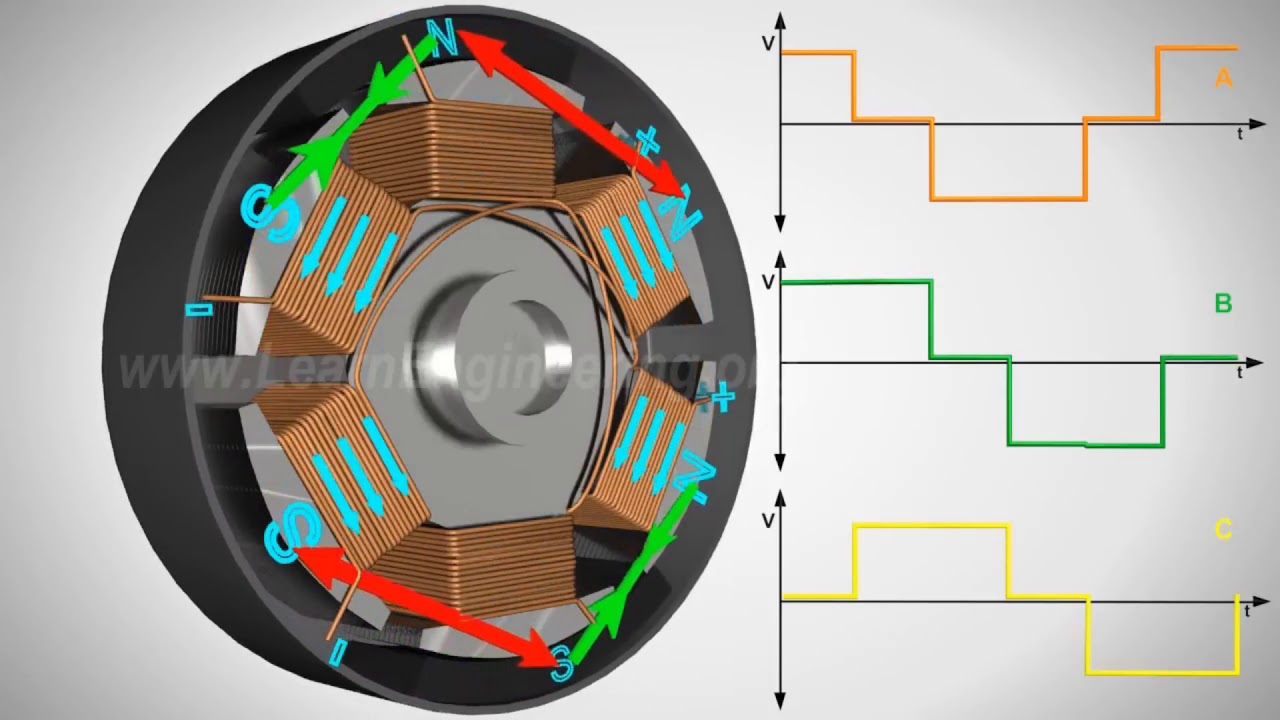 Это также означает, что для работы им требуется частотно-регулируемый привод (VFD или PM), который представляет собой систему управления, которая сглаживает крутящий момент, создаваемый этими двигателями. Включая и отключая ток на обмотки статора на определенных этапах вращения ротора, привод с постоянными магнитами одновременно управляет крутящим моментом и током и использует эти данные для расчета положения ротора и, следовательно, скорости на выходе вала.Это синхронные машины, так как их скорость вращения совпадает со скоростью RMF. Эти машины относительно новые и все еще оптимизируются, поэтому конкретная работа любого PMACM на данный момент по существу уникальна для каждой конструкции.
Это также означает, что для работы им требуется частотно-регулируемый привод (VFD или PM), который представляет собой систему управления, которая сглаживает крутящий момент, создаваемый этими двигателями. Включая и отключая ток на обмотки статора на определенных этапах вращения ротора, привод с постоянными магнитами одновременно управляет крутящим моментом и током и использует эти данные для расчета положения ротора и, следовательно, скорости на выходе вала.Это синхронные машины, так как их скорость вращения совпадает со скоростью RMF. Эти машины относительно новые и все еще оптимизируются, поэтому конкретная работа любого PMACM на данный момент по существу уникальна для каждой конструкции.
Двигатели с постоянными магнитами Технические характеристики
Преобразователи PMACM имеют такие же характеристики, как и асинхронные двигатели, и дополнительные сведения об основных характеристиках этих двигателей можно найти в наших статьях об асинхронных двигателях. Ниже приведены некоторые важные спецификации, относящиеся к PMACM, которые могут помочь разработчикам выбрать правильный двигатель для своей работы.
Тип фазы
Модули PMACMв большинстве случаев питаются от трехфазного входа переменного тока, предназначенного для создания быстрого RMF, что делает их типом трехфазного двигателя. Важно понимать фазу используемого двигателя, поскольку однофазные двигатели по своей природе не запускаются автоматически, а трехфазные двигатели обычно имеют более высокие номинальные значения напряжения / крутящего момента. Более подробную информацию можно найти в наших статьях об однофазных двигателях и типах пускателей двигателей.
Столбы и зубчатые передачи двигателя
Полюса двигателя — это просто магнитные точки север-юг на статоре и роторе.В PMACM эти полюса постоянны в роторе и переключаются в статоре для вращения. Может возникнуть явление, известное как зубчатое движение двигателя, когда постоянное преодоление притяжения и отталкивания постоянных магнитов вызывает нежелательные рывки во время вращения ротора. Зубцы обычно возникают при запуске двигателя и могут вызывать вибрации, шум и неравномерное вращение. Увеличение числа полюсов в PMACM помогает уменьшить эту проблему, а также эффект пульсации крутящего момента (дополнительную информацию о пульсации крутящего момента можно найти в нашей статье о реактивных двигателях).Поэтому PMACM обычно имеют больше полюсов, чем асинхронные двигатели, что позволяет предположить, что им требуется более высокая входная частота для достижения одинаковых скоростей вращения.
Увеличение числа полюсов в PMACM помогает уменьшить эту проблему, а также эффект пульсации крутящего момента (дополнительную информацию о пульсации крутящего момента можно найти в нашей статье о реактивных двигателях).Поэтому PMACM обычно имеют больше полюсов, чем асинхронные двигатели, что позволяет предположить, что им требуется более высокая входная частота для достижения одинаковых скоростей вращения.
Заметность и обратная связь с обратной связью
Эти двигатели должны поставляться со специализированным оборудованием системы управления, которое позволяет им работать наиболее эффективно. В PMACM значимостью является разница в индуктивности на клеммах двигателя при вращении ротора. Эта разница может привести к смещению ротора и статора, что может вызвать нежелательные зубцы / поломки.Для решения этой проблемы используется обратная связь с обратной связью, отслеживая точное положение ротора с помощью датчиков, а затем изменяя входной ток и скорость, чтобы обеспечить непрерывное вращение двигателя.
Температура Кюри
При определенных условиях постоянные магниты могут потерять свой магнетизм. Это размагничивание происходит при температуре Кюри — характеристика магнитов, где за пределами определенной температуры весь магнетизм теряется. Несмотря на то, что двигатели с постоянными магнитами, как правило, работают холоднее, чем другие конструкции, эта температура Кюри особенно важна, поскольку даже приближение к этому значению может вызвать деградацию PMACM.
Заявки и критерии отбора
Поскольку эти двигатели все еще разрабатываются, трудно обеспечить надежный метод выбора. Более полезно подчеркнуть преимущества этих двигателей по сравнению с существующими конструкциями, а также их недостатки, которые могут стать причиной выбора другого, более обычного двигателя.
Самым заманчивым преимуществом PMACM является то, что они обладают более высокой эффективностью благодаря упрощенному ротору. Этот КПД является исключительным при малых нагрузках по крутящему моменту и может сэкономить много кВтч энергии в этих схемах. Эта экономия также увеличивается с размером двигателя, позволяя PMACM конкурировать с обычными асинхронными двигателями в высокоскоростных приложениях с высоким крутящим моментом. Более высокая удельная мощность PMACM в сочетании с их высокоскоростными возможностями и эффективностью может дать асинхронным двигателям, таким как классические двигатели с короткозамкнутым ротором и с фазным ротором, экономию денег. Они также, как правило, занимают меньше места и отлично подходят для модернизации старых систем новыми, меньшими и более мощными PMACM. Будучи более дорогими, чем асинхронные двигатели, по первоначальной стоимости продукта, PMACM и их энергосбережение могут обеспечить полную окупаемость инвестиций чуть более чем за год.Они также являются синхронными, что позволяет им работать там, где асинхронные двигатели не могут. PMACM также имеют более низкую температуру, чем асинхронные двигатели, что увеличивает их надежность и срок службы.
Эта экономия также увеличивается с размером двигателя, позволяя PMACM конкурировать с обычными асинхронными двигателями в высокоскоростных приложениях с высоким крутящим моментом. Более высокая удельная мощность PMACM в сочетании с их высокоскоростными возможностями и эффективностью может дать асинхронным двигателям, таким как классические двигатели с короткозамкнутым ротором и с фазным ротором, экономию денег. Они также, как правило, занимают меньше места и отлично подходят для модернизации старых систем новыми, меньшими и более мощными PMACM. Будучи более дорогими, чем асинхронные двигатели, по первоначальной стоимости продукта, PMACM и их энергосбережение могут обеспечить полную окупаемость инвестиций чуть более чем за год.Они также являются синхронными, что позволяет им работать там, где асинхронные двигатели не могут. PMACM также имеют более низкую температуру, чем асинхронные двигатели, что увеличивает их надежность и срок службы.
Главный недостаток также является причиной их успеха в качестве двигателя; они нуждаются в точном оборудовании систем управления для работы и бесполезны без него. Эти системы увеличивают сложность установки и эксплуатации и могут увеличить первоначальную стоимость PMACM. Другой серьезной проблемой, связанной с этими типами двигателей, является их потребность в редкоземельных магнитах (самарий, неодим и т. Д.).), которые облагаются экологическими налогами и демонстрируют неустойчивые рыночные цены. Таким образом, хотя они энергоэффективны в использовании, они экологически вредны для производства, и их цены могут колебаться в зависимости от постоянно меняющихся цен на магнитных рынках.
Эти системы увеличивают сложность установки и эксплуатации и могут увеличить первоначальную стоимость PMACM. Другой серьезной проблемой, связанной с этими типами двигателей, является их потребность в редкоземельных магнитах (самарий, неодим и т. Д.).), которые облагаются экологическими налогами и демонстрируют неустойчивые рыночные цены. Таким образом, хотя они энергоэффективны в использовании, они экологически вредны для производства, и их цены могут колебаться в зависимости от постоянно меняющихся цен на магнитных рынках.
В настоящее время эти двигатели используются в электромобилях, модификациях, конвейерах, миксерах, измельчителях, насосах, вентиляторах, воздуходувках и приложениях, для которых также подходят асинхронные двигатели. Как объяснялось ранее, эти двигатели все еще исследуются и не так популярны, как традиционные конструкции.Однако по прошествии некоторого времени и дополнительных усилий двигатель с постоянными магнитами может стать отраслевым стандартом для производства механической энергии на рынке.
Сводка
В этой статье представлено понимание того, что такое двигатели с постоянными магнитами и как они работают. Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- https: // www.sevenhwave.org/new-technologies/permanent-magnet-alternating-current-motors
- https://www.xcelenergy.com/staticfiles/xe-responsive/Programs%20and%20Rebates/Business/MN-Motors-PMAC-Information-Sheet.pdf
- https://michaelsenergy.com/briefs/permanent-magnet-ac-motors/
- https://www.mtecorp.com
- https://www.machinedesign.com/#menu
- https://geosci.uchicago.edu
Прочие изделия из двигателей
Больше от Machinery, Tools & Supplies
Двигатель постоянного тока с постоянным магнитом
Двигатель постоянного тока с постоянным магнитом Передаточная функция и модель пространства состояний разработаны для постоянного
магнитный двигатель постоянного тока. Эта система представляет собой комбинацию цепи LR и
масса с вращательным трением.
Эта система представляет собой комбинацию цепи LR и
масса с вращательным трением.
| (вход) | в (т) | = | приложенное напряжение (напряжение якоря) (В) | |
| i (t) | = | ток якоря (А) | неизвестных | |
| v b (т) | = | ЭДС задняя (В) | ||
| τ (т) | = | создаваемый крутящий момент (Нм) | ||
| (выход) | θ (т) | = | положение ротора (рад) | |
| л | = | индуктивность якоря | ||
| R | = | сопротивление якоря | ||
| Дж | = | инерция нагрузки и якоря | ||
| B | = | коэффициент трения двигателя (т. е.грамм. кисти) е.грамм. кисти) |
||
| к τ | = | постоянный крутящий момент двигателя (Нм / А) | ||
| к б | = | Постоянная обратной ЭДС двигателя (В * сек / рад) |
Постоянный магнит создает постоянный поток, поэтому поток входит в моторные константы.
Дифференциальное уравнение
4 неизвестных, поэтому необходимо 4 уравнения.
Передаточная функция
Преобразование Лапласа (уравнение 1), (уравнение 2), (уравнение 3), (уравнение 4):
Решите 4 неизвестных:
Решить для вывода / ввода:
(решение)Блок-схема
Блок-схема нарисована от входа до выхода. Напряжение создает ток,
ток создает крутящий момент, а крутящий момент вращает двигатель, который определяет его положение.
Ниже приведены некоторые методы создания блок-схем и управления ими:
покрыто здесь.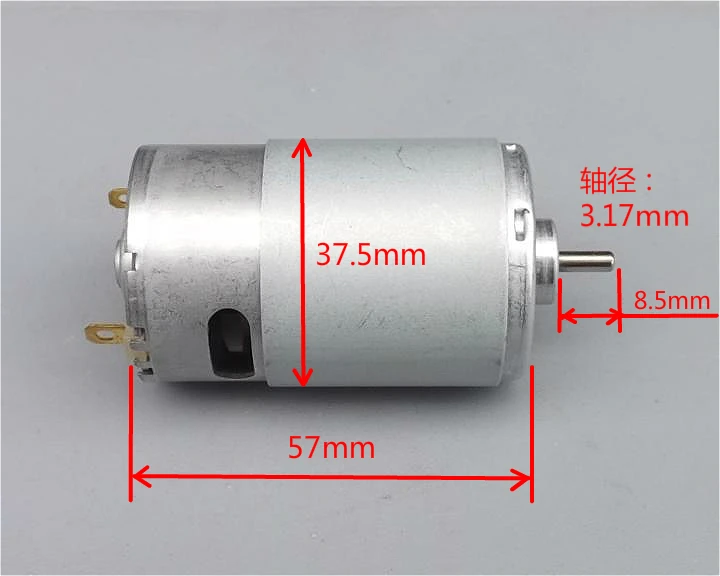
-
Напряжение к току
Переставьте преобразование Лапласа (уравнение 1)
-
Ток к крутящему моменту
Переставьте преобразование Лапласа (уравнение 4)
-
Затяните в положение
. Переставьте преобразование Лапласа (уравнение 2)
-
Задняя ЭДС
Функция передачи от крутящего момента к положению отделена, чтобы показать угловой скорость, которая влияет на обратную ЭДС (ур.3)
Это не единственная блок-схема, которую можно построить для данной системы. но блоки на этой диаграмме точно представляют физические части системы.
Государственная космическая модель
Когда в системе присутствует индуктор, ток через
индуктор обычно выбирается в качестве переменной состояния. Когда присутствует масса,
его положение и скорость обычно выбираются в качестве переменных состояния. Эти три
переменных вместе с входными данными достаточно, чтобы определить поведение этой системы
(будущие значения выхода, то есть положение двигателя в этой системе). По этим причинам ток, положение ротора и угловая скорость ротора
выбраны в качестве переменных состояния.
По этим причинам ток, положение ротора и угловая скорость ротора
выбраны в качестве переменных состояния.
Вектор состояния:
Входной вектор:
Выходной вектор:
Перепишите (уравнение 1), (уравнение 2), (уравнение 3), (уравнение 4) в этих новых обозначениях:
Переставьте уравнения, чтобы выразить ẋ (t) и y (t) в слагаемые x (t) и u (t) :
Перепишите в матричном формате:
(решение)Приближение
Систему 3-го порядка можно аппроксимировать как систему 2-го порядка: следует [1] [2]
[1] Филлипс, Парр (2011) Системы управления с обратной связью, 5-е издание : индуктивность
Достаточно малы, чтобы пренебречь серводвигателями
[2] Спонг, Хатчинсон, Видьясагар (2006) Моделирование и управление роботами : это
разумно предположить L / R (электрическая постоянная времени) << J / B
(механическая постоянная времени) для многих электромеханических систем, поэтому пусть L / R будет 0.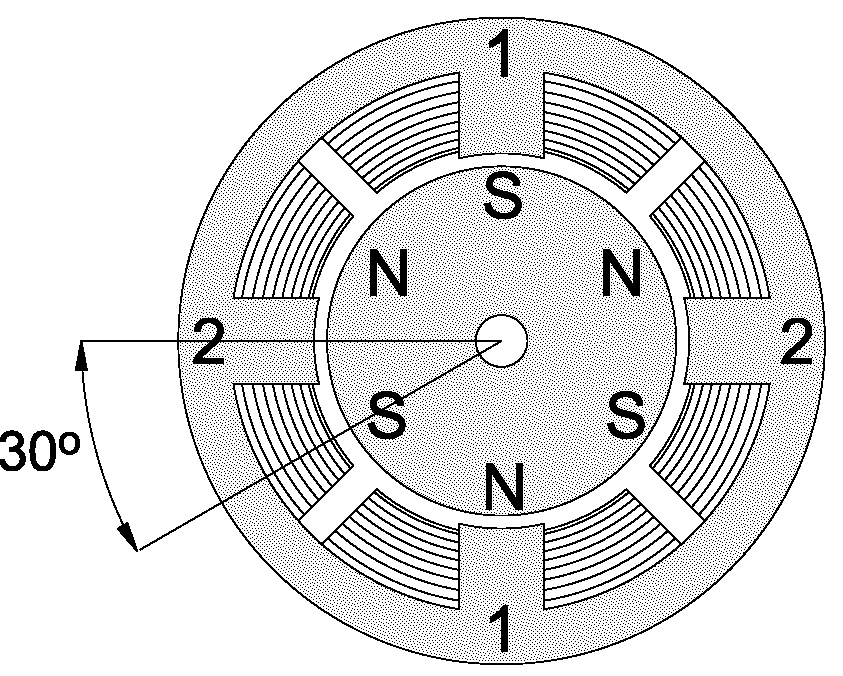
Двигатель постоянного тока с постоянными магнитами — Магниты от HSMAG
Двигатель постоянного тока с постоянным магнитом
Двигатель постоянного тока, полюса которого сделаны из постоянных магнитов, известен как двигатель постоянного тока с постоянным магнитом (PMDC). Магниты намагничены радиально и установлены на внутренней периферии стального цилиндрического статора. Статор двигателя служит обратным каналом для магнитного потока. Ротор имеет якорь постоянного тока с коллекторными сегментами и щетками.
Поперечный разрез двухполюсного двигателя с постоянным током постоянного тока показан на рисунке ниже.
PMDC-Motor-рисунок
Двигатель постоянного тока с постоянным магнитом обычно работает от источника постоянного тока напряжением 6 В, 12 В или 24 В, поступающего от батарей или выпрямителей. Взаимодействие между осевыми токонесущими проводниками ротора и магнитным потоком, создаваемым постоянным магнитом, приводит к возникновению крутящего момента.
Принципиальная схема PMDC показана ниже.
Управление скоростью двигателя с постоянным постоянным током невозможно контролировать с помощью метода управления магнитным потоком, поскольку магнитный поток остается постоянным в этом типе двигателя.И скорость, и крутящий момент можно контролировать с помощью управления напряжением якоря, управления реостатом якоря и методов управления прерывателем. Эти двигатели используются там, где требуется скорость двигателя ниже базовой, поскольку они не могут работать выше базовой скорости.
Типы материалов для постоянных магнитов
В двигателях с постоянным постоянным током используются три типа материалов с постоянными магнитами. Подробная информация представлена ниже.
Алнико
Alnicos имеет низкую коэрцитивную силу намагничивания и высокую остаточную магнитную индукцию.Следовательно, он используется там, где требуется низкий ток и высокое напряжение.
Феррит
Они используются в чувствительных к стоимости приложениях, таких как кондиционеры, компрессоры и холодильники.
Редкоземельный
Редкоземельные магниты изготавливаются из самариевого кобальта, неодима-железа-бора. У них высокий остаточный поток и высокая интенсивность коэрцитивного намагничивания. Редкоземельные магниты избавлены от проблем с размагничиванием из-за реакции якоря. Это дорогой материал.
Неодимовое железо-бор дешевле по сравнению с самариевым кобальтом. Но выдерживает более высокую температуру. Магниты из редкоземельных металлов используются в приложениях, чувствительных к размеру. Они используются в автомобилях, промышленных сервоприводах и в крупных промышленных двигателях.
Применение двигателя постоянного тока с постоянным магнитом
Двигатели с постоянным постоянным током используются в различных приложениях от долей до нескольких лошадиных сил. Они развиваются примерно до 200 кВт для использования в различных отраслях промышленности.Следующие приложения приведены ниже.
Двигатели PMDC в основном используются в автомобилях для управления стеклоочистителями и омывателями, для подъема нижних окон, для привода нагнетателей обогревателей, кондиционеров и т.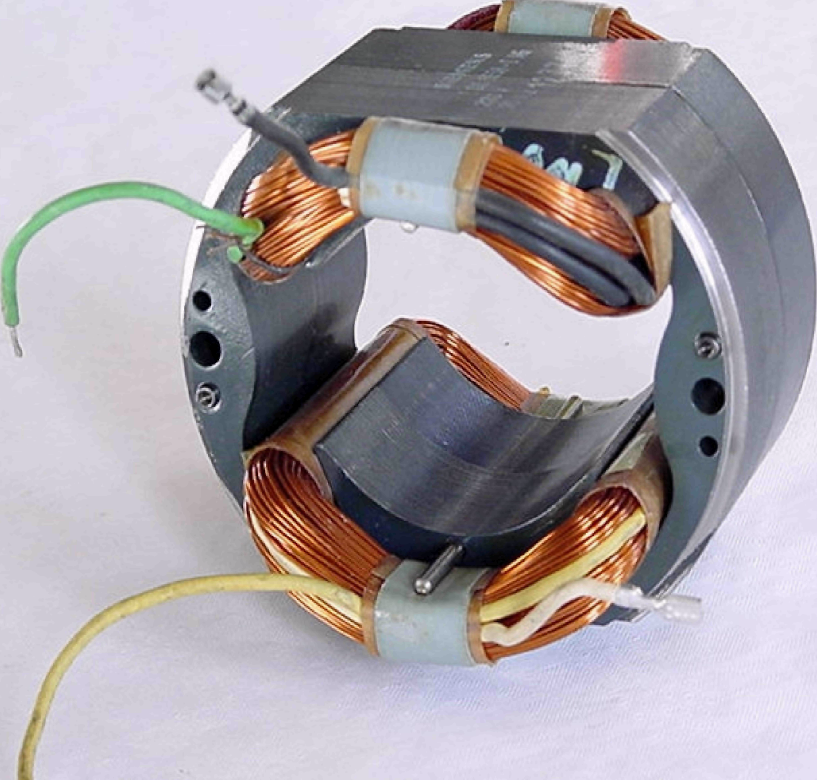 Д.
Д.
Они также используются в приводах компьютеров.
Эти типы двигателей также используются в производстве игрушек. Двигатели
PMDC используются в электрических зубных щетках, портативных пылесосах, миксерах для пищевых продуктов.
Используется в переносном электроинструменте, таком как сверлильные станки, кусторезы и т. Д.
Преимущества двигателя постоянного тока с постоянными магнитами
Ниже приведены преимущества двигателя с постоянным постоянным током.
Они меньше по размеру.
Для меньшего номинала Постоянный магнит снижает стоимость производства и, следовательно, двигатели с постоянным постоянным током дешевле.
Поскольку эти двигатели не требуют обмоток возбуждения, они не имеют потерь в медной цепи возбуждения. Это увеличивает их эффективность.
Недостатки двигателя постоянного тока с постоянными магнитами
Ниже приведены недостатки двигателя с постоянным постоянным током.
Постоянные магниты не могут создавать такую высокую плотность потока, как внешнее шунтирующее поле. Следовательно, двигатель с постоянным постоянным током имеет более низкий наведенный крутящий момент на ампер-виток тока якоря, чем параллельный двигатель того же номинала.
Следовательно, двигатель с постоянным постоянным током имеет более низкий наведенный крутящий момент на ампер-виток тока якоря, чем параллельный двигатель того же номинала.
Существует риск размагничивания полюсов, которое может быть вызвано большими токами якоря. Размагничивание также может происходить из-за чрезмерного нагрева, а также при длительной перегрузке двигателя.
Магнитное поле двигателя PMDC присутствует постоянно, даже когда двигатель не используется.
Нельзя добавлять дополнительные ампер-витки для уменьшения реакции якоря.
Сильнейшие неодимовые магниты со свободной энергией N50, черные эпоксидные постоянные магниты сегмента NdFeB, неодимовые неодимовые магниты N50 NdFeB с диаметрально намагничиванием и постоянным магнитом, генератор дуги Дуговые неодимовые магниты Преимущество перед нашими: стабильное качество Наша команда по контролю качества […]
Редкоземельный постоянный магнит генератора переменного тока
, постоянный магнит генератора неодима, постоянные магниты дугового двигателя, спеченный сегментный магнит NdFeB, неодимовый магнит двигателя генератора переменного тока Производитель Китая Редкоземельный генератор постоянного магнита Характеристика: Номер детали.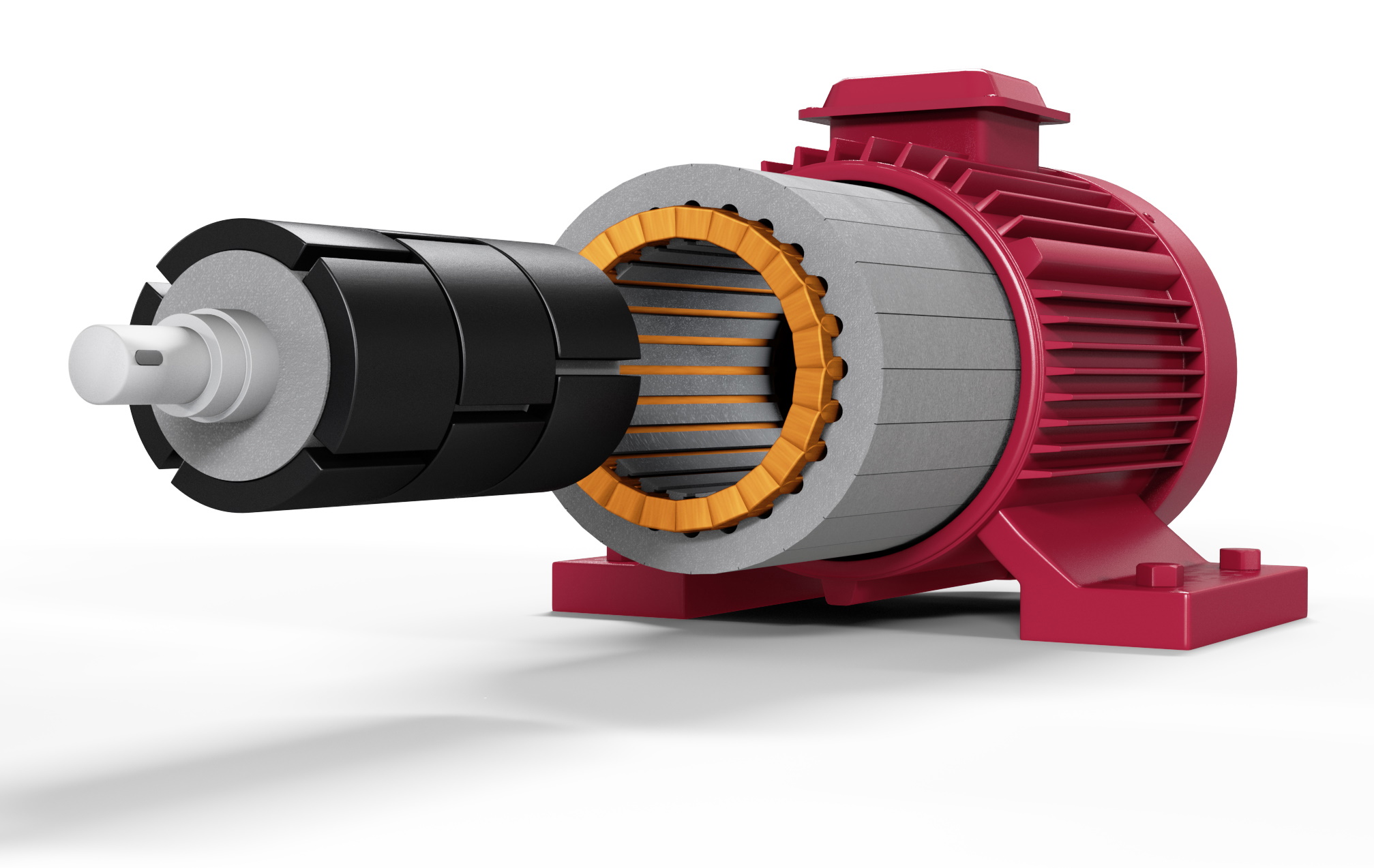 : 45NBS1261 / 2 Размеры: 12 дюймов OD x 6 дюймов ID x 1/2 дюйма Материал: неодим, марка N45 Покрытие / покрытие: никель Направление намагничивания: север на внешней стороне Макс. Рабочая температура: 80 ° C Наши преимущества […]
: 45NBS1261 / 2 Размеры: 12 дюймов OD x 6 дюймов ID x 1/2 дюйма Материал: неодим, марка N45 Покрытие / покрытие: никель Направление намагничивания: север на внешней стороне Макс. Рабочая температура: 80 ° C Наши преимущества […]
Неодимовый генератор постоянного магнита
, постоянные магниты двигателя постоянного тока, постоянные магниты синхронного двигателя, никелированный нео магнит, спеченные дуговые магниты из NdFeB, неодимовый постоянный магнит N42H, неодимовый генератор с постоянным магнитом Характеристика: Номер детали: 42HNBS1481 Размеры: 14 дюймов OD x 8 дюймов ID x 1 дюйм толщиной Материал: неодим, марка N42 Покрытие / покрытие: никель Направление намагничивания: север на внешней стороне Макс.Рабочая температура: 120 ° C. Наши преимущества 1. С 1996 г .: […]
Перманетный магнит для промышленного двигателя, неодимовый магнит для электродвигателя N42H, электродвигатель с никелево-медно-никелевым покрытием из редкоземельных элементов, магниты NdFeB, мощный генераторный магнит Поставщик Промышленный двигатель с постоянным магнитом Характеристика: Номер детали: 42HNBS1.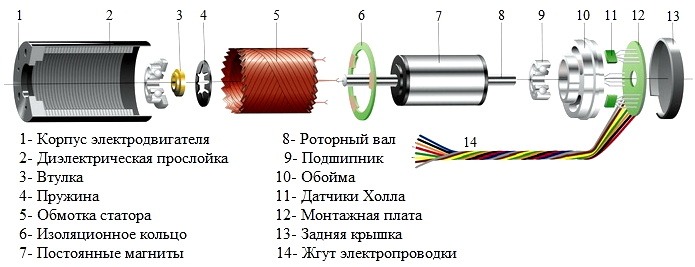 1 / 813 / 4-45 1 1/8 дюйма или x 1 ”i.r. x 3/4 дюйма x 45 Материал: неодим, марка N42H Покрытие: никель-медно-никель Направление намагничивания: север на внешней стороне Макс.Рабочая температура: 120 ° C Неодим […]
1 / 813 / 4-45 1 1/8 дюйма или x 1 ”i.r. x 3/4 дюйма x 45 Материал: неодим, марка N42H Покрытие: никель-медно-никель Направление намагничивания: север на внешней стороне Макс.Рабочая температура: 120 ° C Неодим […]
Связанные
Конструкция, принципиальная схема, характеристики и применение
Мы знаем, что двигатель постоянного тока имеет якорь, который вращается в магнитном поле, и основной принцип работы этого двигателя зависит от токоведущего проводника, который расположен в магнитном поле, и механическая сила будет испытываться с проводником. Двигатели постоянного тока подразделяются на разные типы, которые работают по одному и тому же принципу.Таким образом, конструкция двигателя постоянного тока может быть реализована путем создания магнитного поля с помощью любого типа магнита, такого как электромагнит, или постоянного магнита. PMDC (двигатель постоянного тока с постоянным магнитом) — это двигатель постоянного тока, который включает в себя постоянный магнит для формирования магнитного поля, необходимого для работы двигателя постоянного тока.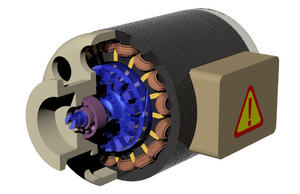 В этой статье обсуждается обзор двигателя постоянного тока с постоянным магнитом или PMDC.
В этой статье обсуждается обзор двигателя постоянного тока с постоянным магнитом или PMDC.
Что такое двигатель постоянного тока с постоянными магнитами?
Двигатель постоянного тока с постоянным магнитом можно определить как двигатель, который включает в себя полюс постоянного магнита, который называется двигателем постоянного тока с постоянным магнитом.В этом двигателе магнит можно использовать для обеспечения работы магнитного потока в воздушном зазоре вместо обмотки возбуждения. Конструкция ротора аналогична прямому двигателю постоянного тока. Ротор двигателя PMDC включает сердечник якоря, коммутатор и обмотку якоря. Обычно в обычном двигателе постоянного тока есть два вида обмоток, такие как якорь и Filed.
Двигатель постоянного тока
Основная функция обмотки возбуждения заключается в создании действующего магнитного потока в воздушном зазоре, а также намотке статора двигателя, в то время как обмотка якоря может быть намотана на ротор. Неактивные угольные щетки нажимаются на коммутатор, как в обычном двигателе постоянного тока. Рабочее напряжение двигателя PMDC составляет 6 вольт, 12 вольт, в противном случае — 24 вольта постоянного тока, получаемого от источников напряжения.
Неактивные угольные щетки нажимаются на коммутатор, как в обычном двигателе постоянного тока. Рабочее напряжение двигателя PMDC составляет 6 вольт, 12 вольт, в противном случае — 24 вольта постоянного тока, получаемого от источников напряжения.
Конструкция двигателя с постоянным постоянным током
Постоянные магниты двигателя с постоянным постоянным током поддерживаются стальным цилиндрическим статором, который обеспечивает обратный путь для магнитного потока. Ротор работает как якорь и включает в себя сегменты коммутатора, пазы для обмоток и щетки, как в обычных машинах постоянного тока.Постоянные магниты, используемые в этом двигателе, подразделяются на три, а именно: магниты Alnico, керамические (ферритовые) магниты и магниты из редкоземельных элементов. Конструкция двигателя
PMDC- Магниты Alnico используются в двигателях мощностью от 1 до 150 кВт.
- Ферритовые или керамические магниты намного дешевле в двигателях с дробной мощностью кВт (киловатт).

- Редкоземельные магниты изготовлены из самария-кобальта, а также из железо-кобальта неодима.
Работа двигателя с постоянным постоянным током
В этом двигателе постоянное магнитное поле может быть создано с помощью постоянных магнитов, которые взаимодействуют посредством перпендикулярного поля, создаваемого потоком токов внутри обмоток ротора; поэтому может быть создан механический крутящий момент.
Когда ротор вращается в ответ на созданный крутящий момент, то положение между статором и полями ротора может быть уменьшено, и крутящий момент будет реверсирован при повороте на 90 градусов. Для поддержания крутящего момента, действующего на ротор, двигатели с постоянным постоянным током включают в себя коммутатор, установленный на валу ротора.
Коммутатор активирует подачу тока к статору таким образом, чтобы поддерживать постоянный угол = 90 между двумя полями. Поскольку ток между обмотками часто активируется, как скручивание ротора, то ток в каждой обмотке статора действительно обменивается с частотой, сравнимой с частотой нет.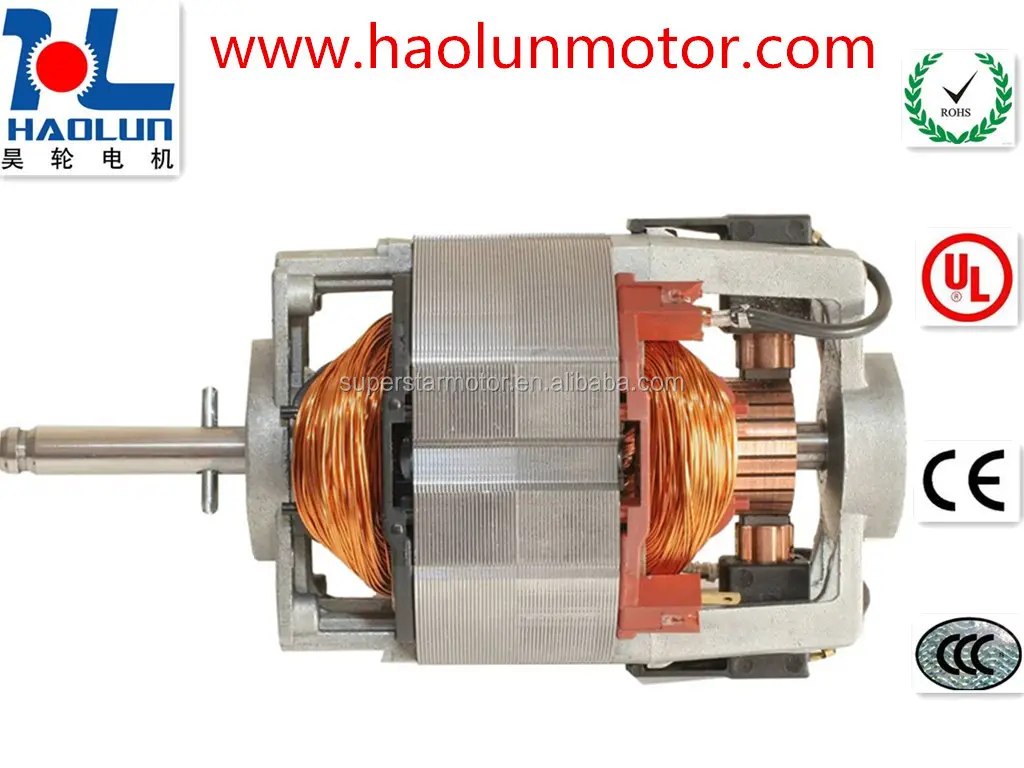 магнитных полюсов двигателя, а также скорость.
магнитных полюсов двигателя, а также скорость.
Принципиальная схема двигателя PMDC
Принципиальная схема двигателя PMDC показана ниже. Как и в двигателе постоянного тока с постоянным магнитом, поле может создаваться с помощью постоянного магнита, поэтому нет необходимости рисовать катушки возбуждения в эквивалентной схеме двигателя с постоянным магнитным полем.
Цепь PMDCПодача напряжения на якорь будет сдерживать падение сопротивления якоря, а также обрыв подачи напряжения может быть нейтрализован задней частью двигателя e.м.ф. Таким образом, уравнение напряжения двигателя определяется следующим образом:
В = IR + Eb
В приведенном выше уравнении
I = ток якоря
R = сопротивление якоря
Eb = обратная ЭДС
В = напряжение питания.
Характеристики двигателя PMDC
Характеристики двигателя PMDC включают следующее.
Характеристики двигателя постоянного тока с постоянным током Характеристики двигателя с постоянным постоянным током связаны с характеристиками двигателя постоянного тока с параллельным двигателем с точки зрения скорости, крутящего момента, а также тока якоря.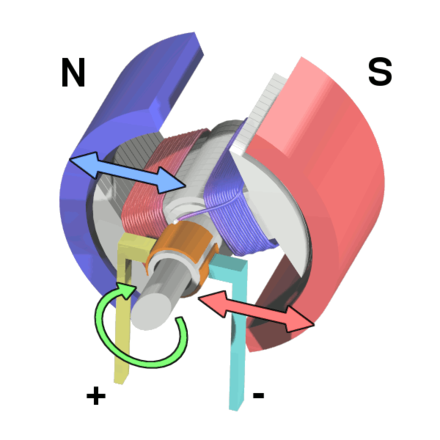 Но характеристики скорость-крутящий момент более линейны, чем обычные для этих типов двигателей.
Но характеристики скорость-крутящий момент более линейны, чем обычные для этих типов двигателей.
Преимущества и недостатки двигателя с постоянным постоянным током
Преимущества и недостатки двигателя с постоянным постоянным током включают следующее.
- Размер этих двигателей меньше
- Эти двигатели дешевле
- Эти двигатели не нуждаются в обмотках возбуждения, и у них нет потерь в меди в цепи возбуждения.
- Основным недостатком этого двигателя является то, что способность генерировать рабочий поток в воздушном зазоре ограничена.Но из-за расширения некоторых новейших магнитных материалов, таких как самарий, кобальт и неодим, железо, бор, эта проблема была определена до некоторой степени.
Применения двигателя PMDC
Применения двигателя PMDC включают следующее.
- Эти двигатели используются в различных областях, от долей до нескольких лошадиных сил. Они разработаны с мощностью 200 кВт для использования в различных отраслях промышленности.

