Как устроен двигатель постоянного тока. Каков принцип его работы. Где применяются двигатели постоянного тока. Какие преимущества и недостатки имеют двигатели постоянного тока.
Устройство двигателя постоянного тока
Двигатель постоянного тока состоит из следующих основных частей:
- Статор — неподвижная часть, создающая основное магнитное поле
- Ротор (якорь) — вращающаяся часть с обмоткой
- Коллектор — устройство для переключения тока в обмотке ротора
- Щетки — обеспечивают электрический контакт с коллектором
- Подшипниковые щиты — для крепления подшипников вала ротора
Статор двигателя постоянного тока имеет цилиндрическую форму и состоит из корпуса (станины) и главных полюсов с обмотками возбуждения. Ротор (якорь) представляет собой цилиндр, набранный из листов электротехнической стали, с пазами, в которые уложена обмотка. На валу ротора закреплен коллектор — цилиндр, собранный из медных пластин, изолированных друг от друга.

Принцип работы двигателя постоянного тока
Принцип действия двигателя постоянного тока основан на взаимодействии магнитного поля статора и тока, протекающего по обмотке ротора. Как это происходит:
- На обмотку возбуждения статора подается постоянный ток, создающий неподвижное магнитное поле
- По обмотке ротора также протекает постоянный ток
- Взаимодействие тока ротора с магнитным полем статора создает вращающий момент
- Ротор начинает вращаться
- При повороте ротора коллектор переключает направление тока в его обмотке
- Это обеспечивает непрерывное вращение ротора
Типы двигателей постоянного тока
В зависимости от способа возбуждения различают следующие типы двигателей постоянного тока:
- С независимым возбуждением — обмотка возбуждения питается от отдельного источника
- С параллельным возбуждением — обмотка возбуждения подключена параллельно якорю
- С последовательным возбуждением — обмотка возбуждения включена последовательно с якорем
- Со смешанным возбуждением — имеет параллельную и последовательную обмотки возбуждения
Характеристики двигателей постоянного тока
Основные характеристики двигателей постоянного тока:

- Механическая характеристика — зависимость частоты вращения от момента на валу
- Регулировочная характеристика — зависимость частоты вращения от напряжения питания
- Пусковой момент — момент при неподвижном роторе
- КПД — отношение полезной мощности к потребляемой
Двигатели постоянного тока обладают «мягкой» механической характеристикой — при увеличении нагрузки частота вращения плавно снижается. Это позволяет легко регулировать скорость в широких пределах.
Преимущества двигателей постоянного тока
Основные достоинства двигателей постоянного тока:
- Широкий диапазон регулирования скорости (до 1:10000)
- Высокая точность регулирования скорости
- Большой пусковой момент
- Линейность механических и регулировочных характеристик
- Компактность и высокая удельная мощность
Недостатки двигателей постоянного тока
К недостаткам двигателей постоянного тока можно отнести:
- Наличие щеточно-коллекторного узла, требующего обслуживания
- Ограниченный срок службы щеток и коллектора
- Искрение на коллекторе при работе
- Более высокая стоимость по сравнению с асинхронными двигателями
Области применения двигателей постоянного тока
Благодаря своим преимуществам двигатели постоянного тока широко применяются в следующих областях:

- Электропривод станков, требующих точного регулирования скорости
- Электротранспорт (электровозы, трамваи, троллейбусы)
- Привод прокатных станов в металлургии
- Судовые электроприводы (привод гребных винтов)
- Сервоприводы в робототехнике и автоматике
- Тяговые электродвигатели электромобилей
Регулирование скорости двигателей постоянного тока
Для регулирования скорости вращения двигателей постоянного тока применяются следующие способы:
- Изменение напряжения питания якоря — позволяет регулировать скорость ниже номинальной
- Ослабление магнитного потока — для увеличения скорости выше номинальной
- Введение добавочного сопротивления в цепь якоря
- Импульсное регулирование с помощью широтно-импульсной модуляции
Современные системы управления на основе силовой электроники позволяют плавно и точно регулировать скорость двигателей постоянного тока в очень широком диапазоне.
Пуск двигателей постоянного тока
При прямом пуске двигателя постоянного тока возникает очень большой пусковой ток, который может в 10-15 раз превышать номинальный. Для ограничения пускового тока применяются следующие способы пуска:
- Реостатный пуск — в цепь якоря вводится пусковой реостат
- Пуск при пониженном напряжении
- Импульсный пуск с помощью тиристорных пусковых устройств
Правильный выбор способа пуска позволяет снизить нагрузку на двигатель и питающую сеть в момент запуска.
Торможение двигателей постоянного тока
Для быстрой остановки двигателей постоянного тока применяются следующие виды электрического торможения:
- Динамическое торможение — обмотка якоря замыкается на сопротивление
- Рекуперативное торможение — двигатель переводится в генераторный режим
- Противовключение — изменяется полярность напряжения на якоре
Выбор способа торможения зависит от требований к быстродействию и энергоэффективности привода.
Современные тенденции в развитии двигателей постоянного тока
Основные направления совершенствования двигателей постоянного тока:
- Применение постоянных магнитов из редкоземельных материалов
- Использование бесконтактных датчиков положения ротора
- Разработка бесколлекторных двигателей постоянного тока
- Совершенствование систем управления на основе микропроцессорной техники
Это позволяет улучшить характеристики двигателей и расширить области их применения.

Двигатели постоянного тока — Устройство, принцип действия электродвигателя
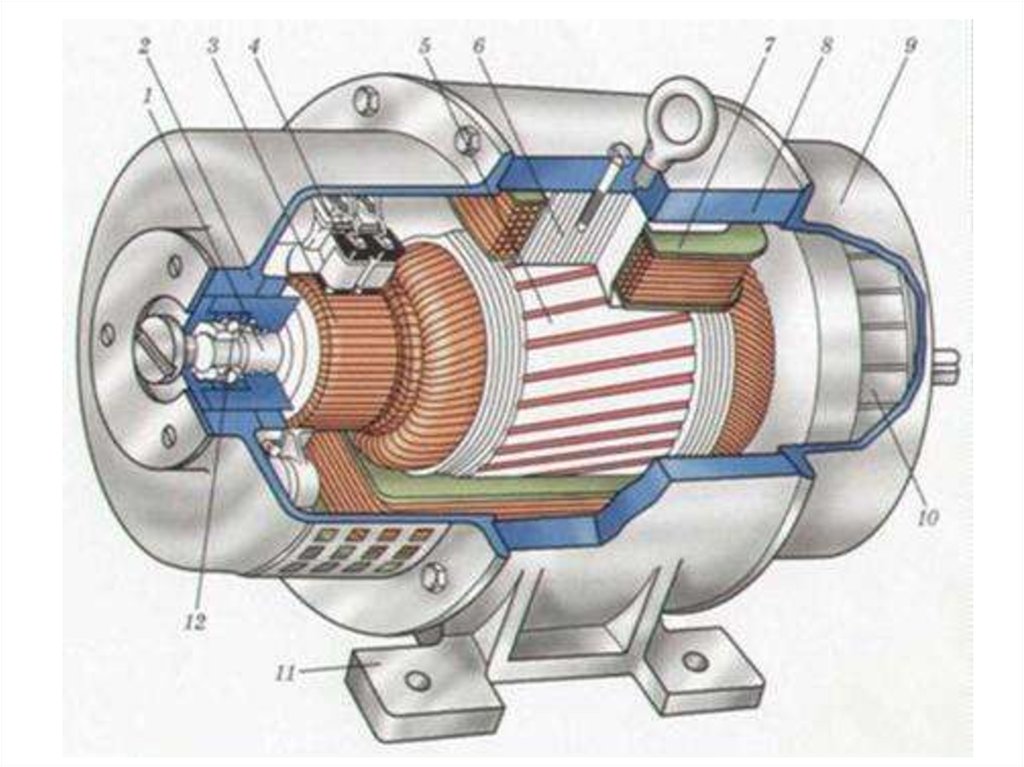
Электрическая машина постоянного тока состоит из статора, якоря, коллектора, щеткодержателя и подшипниковых щитов (рисунок 1). Статор состоит из станины (корпуса), главных и добавочных полюсов, которые имеют обмотки возбуждения. Эту неподвижную часть машины иногда называют индуктором. Главное его назначение — создание магнитного потока. Станина изготавливается из стали, к ней болтами крепятся главные и добавочные полюса, а также подшипниковые щиты. Сверху на станине имеются кольца для транспортирования, снизу — лапы для крепления машины к фундаменту. Главные полюса машины набираются из листов электротехнической стали толщиной 0,5 -1 мм с целью уменьшения потерь, которые возникают из-за пульсаций магнитного поля полюсов в воздушном зазоре под полюсами. Стальные листы сердечника полюса спрессованы и скреплены заклепками.
Рисунок 1 – Машина постоянного тока:
I — вал; 2 — передний подшипниковый щит; 3 — коллектор; 4 — щеткодержатель; 5 — сердечник якоря с обмоткой; б — сердечник главного полюса; 7 — полюсная катушка; 8 — станина; 9 — задний подшипниковый щит; 10 — вентилятор; 11 — лапы; 12 — подшипник
Рисунок 2 – Полюса машины постоянного тока:
а — главный полюс; б — дополнительный полюс; в — обмотка главного полюса; г — обмотка дополнительного полюса; 1 — полюсный наконечник; 2 — сердечник
В полюсах различают сердечник и наконечник (рисунок 2). На сердечник надевают обмотку возбуждения, по которой проходит ток, создавая магнитный поток. Обмотка возбуждения наматывается на металлический каркас, оклеенный электрокартоном (в больших машинах), или размещается на изолированном электрокартоном сердечнике (малые машины). Для лучшего охлаждения катушку делят на несколько частей, между которыми оставляют вентиляционные каналы. Добавочные полюса устанавливаются между главными. Они служат для улучшения коммутации. Их обмотки включаются последовательно в цепь якоря, поэтому проводники обмотки имеют большое сечение.
Рисунок 3 – Расположение секции обмотки якоря в пазах сердечника
Обмотка якоря изготавливается из медных проводов круглого или прямоугольного сечения в виде заранее выполненных секций (рисунок 3). Они укладываются в пазы, где тщательно изолируются. Обмотку делают двухслойной: размещают в каждом пазу две стороны разных якорных катушек — одну над другой. Обмотку закрепляют в пазах клиньями (деревянными, гетинаксовыми или текстолитовыми), а лобовые части крепят специальным проволочным бандажом. В некоторых конструкциях клинья не применяют, а обмотку крепят бандажом. Бандаж изготовляют из немагнитной стальной проволоки, которая наматывается с предварительным натяжением. В современных машинах для бандажировки якорей используют стеклянную ленту.
Коллектор машины постоянного тока собирается из клиноподобных пластин холоднокатаной меди. Пластины изолируют одну от другой прокладками из коллекторного миканита толщиной 0,5 — 1 мм. Нижние (узкие) края пластин имеют вырезы в виде ‘ласточкина хвоста’, которые служат для крепления медных пластин и миканитовой изоляции. Коллекторы крепят нажимными конусами двумя способами: при одном из них усилие от зажима передается только на внутреннюю поверхность ‘ласточкина хвоста’, при втором — на ‘ласточкин хвост’ и конец пластины.
В коллекторных пластинах со стороны якоря при небольшой разнице в диаметрах коллектора и якоря делают выступы, в которых фрезеруют прорези (шлицы). В них укладывают концы обмотки якоря и припаивают оловянистым припоем. При большой разнице в диаметрах припайка к коллектору делается с помощью медных полосок, которые называются ‘петушками’.
В быстроходных машинах большой мощности для предотвращения выпучивания пластин под действием центробежных сил применяют внешние изолированные бандажные кольца.
Щеткодержатель состоит из обоймы, в которую помещается щетка, рычага для прижима щетки к коллектору и пружины. Давление на щетку составляет 0,02 — 0,04 МПа.
Для соединения щетки с электрической цепью имеется гибкий медный тросик.
В машинах малой мощности применяют трубчатые щеткодержатели, которые крепят в подшипниковом щите. Все щеткодержатели одной полярности соединяются между собой сборными шинами, которые подключаются к выводам машины.
Щетки (рисунок 4) в зависимости от состава порошка, способа изготовления и физических свойств разделяют на шесть основных групп: угольно-графитовые, графитовые, электрографитовые, медно-графитовые, бронзографитовые и серебряно-графитовые.
Подшипниковые щиты электрической машины служат в качестве соединительных деталей между станиной и якорем, а также опорной конструкцией для якоря, вал которого вращается в подшипниках, установленных в щитах.
Рисунок 4 – Щетки:
а — для машин малой и средней мощности; б — для машин большой мощности; 1 — щеточный канатик; 2 — наконечник
Различают обычные и фланцевые подшипниковые щиты.
Подшипниковые щиты изготовляют из стали (реже из чугуна или алюминиевых сплавов) методом литья, а также сварки или штамповки. В центре щита делается расточка под подшипник качения: шариковый или роликовый. В машинах большой мощности в ряде случаев используют подшипники скольжения.
В последние годы статор двигателей постоянного тока собирают из отдельных листов электротехнической стали. В листе одновременно штампуются ярмо, пазы, главные и добавочные полюса.
|
Электрический двигатель – неоценимое изобретение человека. Благодаря этому устройству наша цивилизация за последние сотни лет ушла далеко вперёд. Это настолько важно, что принцип работы электродвигателя изучают ещё со школьной скамьи. Круговое вращение электроприводного вала легко трансформируется во все остальные виды движения. Поэтому любой станок, созданный для облегчения труда и сокращения времени на изготовление продукции, можно приспособить под выполнение множества задач. Каков же принцип действия электродвигателя, как он работает и каково его устройство – обо всём этом понятным языком рассказывается в представленной статье. Как работает двигатель постоянного тока
Подавляющее большинство электрических машин работает по принципу магнитного отталкивания и притяжения. Если между северным и южным полюсами магнита поместить проволоку и пропустить по ней ток, то её вытолкнет наружу. Как это возможно? Дело в том, что проходя по проводнику, ток формирует вокруг себя круговое магнитное поле по всей длине провода. Направление этого поля определяют по правилу буравчика (винта). При взаимодействии кругового поля проводника и однородного поля магнита, между полюсами магнитное поле с одной стороны ослабевает, а с другой усиливается. То есть среда становится упругой и результирующая сила выталкивает провод из поля магнита под углом 90 градусов в направлении, определяемом по правилу левой руки (правило правой руки используется для генераторов, а правило левой руки подходит только для двигателей). Эта сила называется «амперовой» и её величина определяется по закону Ампера F=BхIхL, где В – значение магнитной индукции поля; I – ток, циркулирующий в проводнике; L – длина провода.
Это явление использовали как основной принцип работы первых электродвигателей, этот же принцип используют и поныне. В двигателях постоянного тока малой мощности для создания постоянного магнитного поля применяются постоянные магниты. В электромоторах средней и большой мощности однородное магнитное поле создают с помощью обмотки возбуждения или индуктора. Рассмотрим принцип создания механического движения с помощью электричества более подробно. На динамической иллюстрации показан простейший электромотор. В однородном магнитном поле вертикально располагаем проволочную рамку и пропускаем по ней ток. Что происходит? Рамка проворачивается и по инерции двигается какое-то время до достижения горизонтального положения. Это нейтральное положение – мёртвая точка — место, где воздействие поля на проводник с током равно нулю. Чтобы движение продолжилось, нужно добавить ещё хотя бы одну рамку и обеспечить переключение направление тока в рамке в нужный момент. На обучающем видео внизу страницы хорошо виден этот процесс. Принцип действия современных электродвигателей
Современный двигатель постоянного тока вместо одной рамки имеет якорь с множеством проводников, уложенных в пазы, а вместо постоянного подковообразного магнита имеет статор с обмоткой возбуждения с двумя и более полясами. На рисунке показан двухполюсный электромотор в разрезе. Принцип его работы следующий. Если по проводам верхней части якоря пропустить ток движущийся «от нас» (отмечено крестиком), а в нижней части — «на нас» (отмечено точкой), то согласно правилу левой руки верхние проводники будут выталкиваться из магнитного поля статора влево, а проводники нижней половины якоря по тому же принципу будут выталкиваться вправо. Поскольку медный провод уложен в пазах якоря, то, вся сила воздействия будет передаваться и на него, и он будет проворачиваться. Дальше видно, что когда проводник с направлением тока «от нас» провернётся вниз и станет против южного полюса создаваемого статором, то он будет выдавливаться в левую сторону, и произойдёт торможение. Чтобы этого не случилось нужно поменять направление тока в проводе на противоположное, как только будет пересечена нейтральная линия. Это делается с помощью коллектора – специального переключателя, коммутирующего обмотку якоря с общей схемой электродвигателя. Таким образом, обмотка якоря передаёт вращающий момент на вал электромотора, а тот в свою очередь приводит в движение рабочие механизмы любого оборудования, такого как, например, станок для сетки рабицы. Хотя в этом случае используется переменного тока, основной принцип его работы идентичен принципу действия двигателя постоянного тока – это выталкивание проводника с током из магнитного поля. Только у асинхронного электромотора вращающееся магнитное поле, а у электродвигателя постоянного тока – поле статичное.
Продолжая тему двигателя постоянного тока нужно отметить, что принцип действия электродвигателя основывается на инвертировании постоянного тока в якорной цепи, чтобы не было торможения, и вращение ротора поддерживалось в постоянном ритме. Если изменить направление тока в возбуждающей обмотке статора, то, согласно правилу левой руки, изменится направление вращения ротора. То же самое произойдёт, если мы поменяем местами щёточные контакты, подводящие питание от источника к якорной обмотке. А вот если поменять «+» «-» и там и там, то направление вращения вала не изменится. Поэтому, в принципе, для питания такого мотора можно использовать и переменный ток, т.к. ток в индукторе и якоре будет меняться одновременно. На практике такие устройства используются редко. Что касается электрической то их несколько и они показаны на рисунке. При параллельном соединении обмоток, обмотка якоря делается из большого количества витков тонкой проволоки. При таком подключении коммутируемый коллектором ток будет значительно меньше из-за большого сопротивления и пластины не будут сильно искрить и выгорать. Если делать последовательное соединение обмоток индуктора и якоря, то обмотка индуктора делается из провода большего диаметра с меньшим количеством витков, т.к. весь якорный ток устремляется через статорную обмотку. При таких манипуляциях с пропорциональным изменением значений тока и количества витков, намагничивающая сила остаётся постоянной, а качественные характеристики устройства становятся лучше. На сегодняшний день двигатели постоянного тока мало используются на производстве. Из недостатков этого типа электрических машин можно отметить быстрый износ щёточно-коллекторного узла. Преимущества – хорошие характеристики запуска, лёгкая регулировка частоты и направления вращения, простота устройства и управления. • Скачать лекцию: двигатели постоянного тока
Свежие записи: |
Бесколлекторный двигатель постоянного тока: особенности и принцип работы
Как работает бесколлекторный двигатель?Бесколлекторный двигатель постоянного тока имеет на статоре трёхфазную обмотку, и постоянный магнит на роторе. Вращающееся магнитное поле создаётся обмоткой статора, при взаимодействии с которым магнитный ротор приходит в движение. Для создания вращающегося магнитного поля на обмотку статора подаётся система трёхфазных напряжений, которая может иметь различную форму и формируется различными способами. Формирование питающих напряжений (коммутация обмоток) для бесколлекторного двигателя постоянного тока производиться специализированными блоками электроники – контроллером двигателя.
Заказать бесколлекторный двигатель в нашем каталоге
В простейшем случае обмотки попарно подключаются к источнику постоянного напряжения и по мере того как ротор поворачивается в направлении вектора магнитного поля обмотки статора производится подключение напряжения к другой паре обмоток. Вектор магнитного поля статора при этом занимает другое положение и вращение ротора продолжается. Для определения нужного момента подключения следующих обмоток используется датчик положения ротора, чаще других используются датчики Холла.
Возможные варианты и специальные случаи
Выпускаемые сейчас бесколлекторные двигатели могут иметь самую разную конструкцию.
По исполнению статорной обмотки можно выделить двигатели с классической обмоткой, намотанной на стальной сердечник, и двигатели с полой цилиндрической обмоткой без стального сердечника. Классическая обмотка обладает значительно большей индуктивностью, чем полая цилиндрическая обмотка, и соответственно большей постоянной времени. Из-за этого с одной стороны, полая цилиндрическая обмотка допускает более динамичное изменение тока (а, следовательно, и момента), с другой стороны при работе от контроллера двигателя, использующего ШИМ-модуляцию невысокой частоты для сглаживания пульсаций тока, требуются фильтрующие дроссели большего номинала (а соответственно и большего размера). Кроме того, классическая обмотка, как правило, имеет заметно больший момент магнитной фиксации, а также меньший КПД, чем полая цилиндрическая обмотка.
Ещё одно отличие, по которому разделяются различные модели двигателей – это взаимное расположение ротора и статора – существуют двигатели с внутренним ротором и двигатели с внешним ротором. Двигатели с внутренним ротором, как правило, имеют более высокие скорости и меньший момент инерции ротора, чем модели с внешним ротором. Благодаря этому двигатели с внутренним ротором имеют более высокую динамику. Двигатели с внешним ротором часто имеют несколько больший номинальный момент при том же наружном диаметре двигателя.
Отличия от других типов двигателей
Отличия от коллекторных ДПТ. Размещение обмотки на роторе позволило отказаться от щёток и коллектора и избавиться тем самым от подвижного электрического контакта, который значительно снижает надёжность ДПТ с постоянными магнитами. По этой же причине скорость у бесколлекторных двигателей, как правило, значительно выше, чем у ДПТ с постоянными магнитами. С одной стороны это позволяет увеличить удельную мощность бесколлекторного двигателя, с другой стороны не для всех применений такая высокая скорость является действительно необходимой
Отличия от синхронных двигателей с постоянными магнитами. Синхронные двигатели с постоянными магнитами на роторе очень похожи на бесколлекторные ДПТ по конструкции, однако есть и ряд различий. Во-первых термин синхронный двигатель объединяет в себе много различных видов двигателей, часть из которых предназначены для непосредственной работы от стандартной сети переменного тока, другая часть (например синхронные серводвигатели) может работать только от преобразователей частоты (контроллеров двигателей). Бесколлекторные двигатели, хотя и имеют на статоре трёхфазную обмотку, не допускают непосредственную работу от сетевого напряжения, и обязательно требуют наличия соответствующего контроллера. Кроме того синхронные двигатели предполагают питание напряжением синусоидальной формы в то время как бесколлекторные двигатели допускают питание переменным напряжением ступенчатой формы (блочная коммутация) и даже предполагают его использование в номинальных режимах работы.
Когда нужен бесколлекторный двигатель?
Ответ на этот вопрос достаточно прост – в тех случаях, когда он имеет преимущество перед остальными типами двигателей. Так, например, практически невозможно обойтись без бесколлекторного двигателя в применениях, где требуются большие скорости вращения: свыше 10000 об/мин. Оправдано применение бесколлекторных двигателей также и в тех случаях, когда требуется высокий срок службы двигателя. В тех случаях, когда требуется применять сборку из двигателя с редуктором, однозначно оправдано применение низкоскоростных бесколлекторных двигателей (с большим числом полюсов). Высокоскоростные бесколлекторные двигатели в этом случае будут иметь скорость выше, чем предельно допустимая скорость редуктора, и по этой причине не будет возможности использовать их мощность полностью. Для применений, где требуется максимально простое управление двигателем (без использования контроллера двигателя) естественным выбором будет коллекторный ДПТ.
С другой стороны, в условиях повышенной температуры или повышенной радиации проявляется слабое место бесколлекторных двигателей – датчики Холла. Стандартные модели датчиков Холла имеют ограниченную стойкость к радиации и диапазон рабочих температур. Если в подобном применении всё же имеется необходимость использовать бесколлекторный двигатель, то неизбежными становятся заказные исполнения с заменой датчиков Холла на более стойкие к указанным факторам, что увеличивает цену двигателя и сроки поставки.
Принцип работы двигателя постоянного тока
Принцип работы
Двигатели постоянного тока
На статоре находится индукторная обмотка (обмотка возбуждения), на которую подаётся постоянный ток — в результате создаётся постоянное магнитное поле (поле возбуждения). В двигателях с постоянными магнитами поле возбуждения создаётся постоянными магнитами.
В обмотку ротора (якорная обмотка) также подаётся постоянный ток, на который со стороны магнитного поля статора действует сила Ампера — создаётся вращающий момент, который поворачивает ротор на 90 электрических градусов, после чего щёточно-коллекторный узел коммутирует обмотки ротора – вращение продолжается.
По способу возбуждения двигатели постоянного тока делятся на четыре группы:
- С независимым возбуждением — обмотка возбуждения питается от независимого источника
- С параллельным возбуждением — обмотка возбуждения включается параллельно источнику питания обмотки якоря
- С последовательным возбуждением — обмотка возбуждения включена последовательно с обмоткой якоря
- Со смешанным возбуждением — у двигателя есть две обмотки: параллельная и последовательная.
Пуск двигателя постоянного тока
При прямом пуске ток якоря может на порядок превышать номинальный, поэтому при пуске в цепь якоря вводится пусковое сопротивление пусковой реостат. Для плавного пуска реостат делают ступенчатым — в первый момент включаются все ступени (максимальное сопротивление), по мере разгона двигателя растёт противо-ЭДС, ток якоря уменьшается — ступени выключаются одна за другой.
Регулирование скорости вращения двигателя постоянного тока
- Скорость ниже номинальной регулируется напряжением на якоре (мощность при этом пропорциональна скорости, момент неизменен)
- Скорость выше номинальной регулируется током обмотки возбуждения — чем слабее поле возбуждения, тем выше скорость (момент падает при постоянной мощности)
Регулирование питания якоря и обмотки возбуждения осуществляется с помощью тиристорных преобразователей (приводов постоянного тока).
Преимущества и недостатки двигателей постоянного тока
Преимущества:
- Практически линейные характеристики двигателя:
- механическая характеристика (зависимость частоты от момента)
- регулировочная характеристика (зависимость частоты от напряжения якоря)
- Просто регулировать частоту вращения в широких пределах
- Большой пусковой момент
- Компактный размер.
Недостатки:
- Дополнительные расходы на профилактическое обслуживание коллекторно-щёточных узлов
- Ограниченный срок службы из-за износа коллектора
- Дороже асинхронных двигателей.
Принцип действия двигателя постоянного тока: конструкция и особенности
Главной конструктивной и характерной принадлежностью машины постоянного тока, служит использование для присоединения к электрической сети коммутатора, предназначенного для преобразования величин постоянного тока в переменный ток. Коммутатор является непременным элементом любой машины этого типа ввиду того, что ее якорная обмотка двигателя подразумевает наличие переменного тока.
Особенности двигателя постоянного тока
Двигательные устройства постоянного тока отличаются широкими возможностями регулирования скорости вращения и обладают способностью сохранять во всем диапазоне регулирования высокий КПД, а также имеют в наличии механические характеристики, благодаря которым двигатели могут использоваться по специальному назначению, в соответствии с необходимыми требованиями.
Принцип работы
Функционально двигатель принадлежит к классу синхронных машин обращенного типа, это объясняется тем, что статор и ротор поменяли выполнение задач. Статор выполняет функции по возбуждению магнитного поля, ротор принял задачи направленные на преобразование энергии.
Во время вращения якоря в магнитном поле, производимым статором в витках обмотки, наводится ЭДС. Направление ее движения находится по правилу правой руки.
После того, как якорь и коллектор повернутся на 180 градусов виток меняет свои стороны, на противоположное направление меняется движение ЭДС.
Так происходит процесс индуцирования переменной электродвижущей силы, выпрямляемой посредством коллектора.
Коллектор, через щеточный механизм, соединен с обеими сторонами витка, в результате этого происходит снятие щетками текущего в неизменном направлении пульсирующего напряжения, это способствует наличию во внешней цепи, идущего в постоянном направлении, пульсирующего тока. Для того, чтобы снизить пульсацию в пазах якоря, прибавляют добавочное количество витков.
Конструкция двигателя
Двигатель, как и любая другая машина этого типа, содержит в своей конструкции статор, являющегося неподвижным элементом, и ротор (якорь) – вращающийся элемент машины, между ними находится воздушный зазор. В якоре двигателя происходит индуцирование ЭДС. Создание основного магнитного поля происходит при помощи главных полюсов, состоящих из сердечников и катушек возбуждения.
Равномерное распределение полученной магнитной индукции в области воздушного зазора обеспечивается полюсными наконечниками.
Чередование полярности полюсов во время движения электрического тока достигается за счет соединения катушек главных полюсов в обмотку возбуждения. Для улучшения коммутации предусмотрены добавочные полюса.
Уменьшение вихревых токов, которые появляются в результате перемагничивания якоря в процессе его вращения в созданном магнитном поле, происходит за счет конструкции сердечника, исполненного из пластин электротехнической стали, для большего эффекта он покрывается специальным лаком.
Контакт внешней цепи машины с коллектором осуществляется за счет щеток, основным материалом для них является графит.
Область применения
Несмотря на то, что себестоимость этого типа двигателя намного дороже асинхронных машин, их особенности могут сыграть решающую роль в узкоцелевом специальном назначении.
С помощью таких двигателей приводятся в работу прокатные станы, они используются для привода гребного винта на кораблях, а также для транспортных средств, имеющих систему питания на постоянном токе.
Поэтому их область использования характерна для нужд там, где необходима электрическая тяга, это: тепловозы, электровозы, электропоезда, городской транспорт, то есть там, где необходимо применить мягкие механические характеристики и широкие пределы регулировки количества оборотов вращения.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на карту сайта, буду рад, если вы найдете на моем сайте еще что-нибудь полезное. Всего доброго.
Как работает двигатель постоянного тока ?
Дорогие мои читатели, начинаем разбирать темы августовского стола заказов (боже мой, как быстро летит время!). Сегодняшняя тема может быть мало кого заинтересует, зато если кого заинтересует, так это будет очень в пользу им. Слушаем trudnopisaka: Напишите пожалуйста понятно о устройстве электродвигателей постоянного тока. Можно на примере одного из типов. Ведь с одной стороны принцип работы очень простой, а с другой, если разобрать один из электродвигателей, то там много деталей, назначение которых не очевидно. А на сайтах в начале поисковой выдачи есть только название этих деталей, в лучшем случае. Планирую с детьми собрать простой электродвигатель, чтобы это помогло им в понимании техники и они не боялись ее осваивать.
Первый этап развития электродвигателя (1821-1832) тесно связан с созданием физических приборов для демонстрации непрерывного преобразования электрической энергии в механическую.
В 1821 году М. Фарадей, исследуя взаимодействие проводников с током и магнитом, показал, что электрический ток вызывает вращение проводника вокруг магнита или вращение магнита вокруг проводника. Опыт Фарадея подтвердил принципиальную возможность построения электрического двигателя.
Для второго этапа развития электродвигателей (1833-1860) характерны конструкции с вращательным движением якоря.
Томас Дэвенпорт — американский кузнец, изобретатель, в 1833 году сконструировал первый роторный электродвигатель постоянного тока, создал приводимую им в движение модель поезда. В 1837 году он получил патент на электромагнитную машину.
В 1834 году Б. С. Якоби создал первый в мире электрический двигатель постоянного тока, в котором реализовал принцип непосредственного вращения подвижной части двигателя. 13 сентября 1838 г. лодка с 12 пассажирами поплыла по Неве против течения со скоростью около 3 км/ч. Лодка была снабжена колесами с лопастями. Колеса приводились во вращение электрическим двигателем, который получал ток от батареи из 320 гальванических элементов. Так впервые электрический двигатель появился на судне.
Испытания различных конструкций электродвигателей привели Б. С. Якоби и других исследователей к следующим выводам:
- расширение применения электродвигателей находится в прямой зависимости от удешевления электрической энергии, т. е. от создания генератора, более экономичного, чем гальванические элементы;
- электродвигатели должны иметь по возможности малые габариты, большую мощность ибольший коэффициент полезного действия;
- этап в развитии электродвигателей связан с разработкой конструкций с кольцевым неявнополюсным якорем и практически постоянным вращающим моментом.
Третий этап развития электродвигателей характеризуется открытием и промышленным использованием принципа самовозбуждения, в связи с чем был окончательно осознан и сформулирован принцип обратимости электрической машины. Питание электродвигателей стало производиться от более дешёвого источника электрической энергии — электромагнитного генератора постоянного тока.
В 1886 году электродвигатель постоянного тока приобрёл основные черты современной конструкции. В дальнейшем он всё более и более совершенствовался.
В настоящее время трудно представить себе жизнь человечества без электродвигателя. Он используется в поездах, троллейбусах, трамваях. На заводах и фабриках стоят мощные электрические станки. Электромясорубки, кухонные комбайны, кофемолки, пылесосы — всё это используется в быту и оснащено электродвигателями.
Подавляющее большинство электрических машин работает по принципу магнитного отталкивания и притяжения. Если между северным и южным полюсами магнита поместить проволоку и пропустить по ней ток, то её вытолкнет наружу. Как это возможно? Дело в том, что проходя по проводнику, ток формирует вокруг себя круговое магнитное поле по всей длине провода. Направление этого поля определяют по правилу буравчика (винта).
При взаимодействии кругового поля проводника и однородного поля магнита, между полюсами магнитное поле с одной стороны ослабевает, а с другой усиливается. То есть среда становится упругой и результирующая сила выталкивает провод из поля магнита под углом 90 градусов в направлении, определяемом по правилу левой руки (правило правой руки используется для генераторов, а правило левой руки подходит только для двигателей). Эта сила называется «амперовой» и её величина определяется по закону Ампера F=BхIхL, где В – значение магнитной индукции поля; I – ток, циркулирующий в проводнике; L – длина провода.
Это явление использовали как основной принцип работы первых электродвигателей, этот же принцип используют и поныне. В двигателях постоянного тока малой мощности для создания постоянного магнитного поля применяются постоянные магниты. В электромоторах средней и большой мощности однородное магнитное поле создают с помощью обмотки возбуждения или индуктора.
Рассмотрим принцип создания механического движения с помощью электричества более подробно. На динамической иллюстрации показан простейший электромотор. В однородном магнитном поле вертикально располагаем проволочную рамку и пропускаем по ней ток. Что происходит? Рамка проворачивается и по инерции двигается какое-то время до достижения горизонтального положения. Это нейтральное положение – мёртвая точка — место, где воздействие поля на проводник с током равно нулю. Чтобы движение продолжилось, нужно добавить ещё хотя бы одну рамку и обеспечить переключение направление тока в рамке в нужный момент. На обучающем видео внизу страницы хорошо виден этот процесс.
Современный двигатель постоянного тока вместо одной рамки имеет якорь с множеством проводников, уложенных в пазы, а вместо постоянного подковообразного магнита имеет статор с обмоткой возбуждения с двумя и более полясами. На рисунке показан двухполюсный электромотор в разрезе. Принцип его работы следующий. Если по проводам верхней части якоря пропустить ток движущийся «от нас» (отмечено крестиком), а в нижней части — «на нас» (отмечено точкой), то согласно правилу левой руки верхние проводники будут выталкиваться из магнитного поля статора влево, а проводники нижней половины якоря по тому же принципу будут выталкиваться вправо. Поскольку медный провод уложен в пазах якоря, то, вся сила воздействия будет передаваться и на него, и он будет проворачиваться. Дальше видно, что когда проводник с направлением тока «от нас» провернётся вниз и станет против южного полюса создаваемого статором, то он будет выдавливаться в левую сторону, и произойдёт торможение. Чтобы этого не случилось нужно поменять направление тока в проводе на противоположное, как только будет пересечена нейтральная линия. Это делается с помощью коллектора – специального переключателя, коммутирующего обмотку якоря с общей схемой электродвигателя.
Таким образом, обмотка якоря передаёт вращающий момент на вал электромотора, а тот в свою очередь приводит в движение рабочие механизмы любого оборудования, такого как, например, станок для сетки рабицы. Хотя в этом случае используется асинхронный двигатель переменного тока, основной принцип его работы идентичен принципу действия двигателя постоянного тока – это выталкивание проводника с током из магнитного поля. Только у асинхронного электромотора вращающееся магнитное поле, а у электродвигателя постоянного тока – поле статичное.
Конструктивно все электрические двигатели постоянного тока состоят из индуктора и якоря, разделенных воздушным зазором.
Индуктор (статор) электродвигателя постоянного тока служит для создания неподвижного магнитного поля машины и состоит из станины, главных и добавочных полюсов. Станина служит для крепления основных и добавочных полюсов и является элементом магнитной цепи машины. На главных полюсах расположены обмотки возбуждения, предназначенные для создания магнитного поля машины, на добавочных полюсах — специальная обмотка, служащая для улучшения условий коммутации.
Якорь электродвигателя постоянного тока состоит из магнитной системы, собранной из отдельных листов, рабочей обмотки, уложенной в пазы, и коллектора служащего для подвода к рабочей обмотке постоянноготока.
Коллектор представляет собой цилиндр, насаженный на вал двигателя и избранный из изолированных друг от друга медных пластин. На коллекторе имеются выступы-петушки, к которым припаяны концы секций обмотки якоря. Съем тока с коллектора осуществляется с помощью щеток, обеспечивающих скользящий контакт с коллектором. Щетки закреплены в щеткодержателях, которые удерживают их в определенном положении и обеспечивают необходимое нажатие щетки на поверхность коллектора. Щетки и щеткодержатели закреплены на траверсе, связанной с корпусомэлектродвигателя.
Коллекторный движок он очень хорош. Он чертовски легко и гибко регулируется. Можно повышать обороты, понижать, механическая характеристика жесткая, момент он держит на ура. Зависимость прямая. Ну сказка, а не мотор. Если бы не одна ложка дегтя во всей этой вкусняшке — коллектор.
Это сложный, дорогой и очень ненадежный узел. Он искрит, создает помехи, забивается проводящей пылью от щеток. А при большой нагрузке может полыхнуть, образовав круговой огонь и тогда все, капец движку. Закоротит все дугой наглухо.
Но что такое коллектор вообще? Нафига он нужен? Выше я говорил, что коллектор это механический инвертор. Его задача переключать напряжение якоря туда сюда, подставляя обмотку под поток.
Коллектор в электрических машинах выполняет роль выпрямителя переменного тока в постоянный (в генераторах) и роль автоматического переключателя направления тока во вращающихся проводниках якоря (в двигателях).
Когда магнитное поле пересекается только двумя проводниками, образующими рамку, коллектор будет представлять собой одно кольцо, разрезанное на две части, изолированные одна от другой. В общем случае каждое полукольцо носит название коллекторной пластины.
Начало и конец рамки присоединяются каждый к своей коллекторной пластине. Щетки располагаются таким образом, чтобы одна из них была всегда соединена с проводником, который будет двигаться у северного полюса, а другая — с проводником, который будет двигаться у южного полюса.
Рис. 2. Упрощенное изображения коллектора
Рис. 3. Выпрямление переменного тока с помощью коллектора
Сообщим рамке вращательное движение в направлении по часовой стрелке. В момент, когда вращающаяся рамка займет положение, изображенное на рис. 3, А, в ее проводниках будет индуктироваться наибольший по величине ток, так как проводники пересекают магнитные силовые линии, двигаясь перпендикулярно к ним.
Индуктированный ток из проводника В, соединенного с коллекторной пластиной 2, поступит на щетку 4 и, пройдя внешнюю цепь, через щетку 3 возвратится в проводник А. При этом правая щетка будет положительной, а левая отрицательной.
Дальнейший поворот рамки (положение В) приведет снова к индуктированию тока в обоих проводниках; однако направление тока в проводниках будет противоположно тому, которое они имели в положении А. Так как вместе с проводниками повернутся и коллекторные пластины, то щетка 4 снова будет отдавать электрический ток во внешнюю цепь, а по щетке 3 ток будет возвращаться в рамку.
Отсюда следует, что, несмотря на изменение направления тока в самих вращающихся проводниках, благодаря переключению, произведенному коллектором, направление тока во внешней цепи не изменилось.
В следующий момент (положение Г), когда рамка вторично займет положение на нейтральной линии, в проводниках и, следовательно, во внешней цепи тока опять не будет.
В последующие моменты времени рассмотренный цикл движений будет повторяться в том же порядке. Таким образом, направление индуктированного направление тока во внешней цепи благодаря коллектору все время будет оставаться одним и тем же, а вместе с этим сохранится и полярность щеток.
Щёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе и переключения тока в обмотках ротора. Щётка — неподвижный контакт (обычно графитовый или медно-графитовый). Щётки с большой частотой размыкают и замыкают пластины-контакты коллектора ротора. Как следствие, при работе ДПТ происходят переходные процессы, в обмотках ротора. Эти процессы приводят к искрению на коллекторе, что значительно снижает надёжность ДПТ. Для уменьшения искрения применяются различные способы, основным из которых является установка добавочных полюсов. При больших токах, в роторе ДПТ возникают мощные переходные процессы, в результате чего, искрение может постоянно охватывать все пластины коллектора, независимо от положения щёток. Данное явление называется кольцевым искрением коллектора или «круговой огонь». Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора не допустим. При проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем.Конструкция двигателя может иметь один или несколько щеточно-коллекторных узлов.
А на дворе то уже 21 век и дешевые и мощные полупроводники сейчас на каждом шагу. Так зачем нам нужен механический инвертор если мы можем сделать его электронным? Правильно, незачем! Так что берем и заменяем коллектор силовыми ключами, а еще добавляем датчики положения ротора, чтобы знать в какой момент переключать обмотки.
А для пущего удобства выворачиваем двигатель наизнанку — гораздо проще вращать магнит или простенькую обмотку возбуждения, чем якорь со всей этой тряхомудией на борту. В качестве ротора тут выступает либо мощный постоянный магнит, либо обмотка питаемая с контактных колец. Что хоть и смахивает на коллектор, но не в пример надежней его.
И получаем что? Правильно! Бесщеточный двигатель постоянного тока aka BLDC. Все те же няшные и удобные характеристики ДПТ, но без этого мерзкого коллектора. И не надо путать BLDC с синхронными двигателями. Это совсем разные машины и разным принципом действия и управления, хотя конструктивно они ОЧЕНЬ схожи и тот же синхронник вполне может работать как BLDC, добавить ему только датчиков да систему управления. Но это уже совсем другая история. ВОТ ТУТ можно прочитать про него подробнее.
Продолжая тему двигателя постоянного тока нужно отметить, что принцип действия электродвигателя основывается на инвертировании постоянного тока в якорной цепи, чтобы не было торможения, и вращение ротора поддерживалось в постоянном ритме. Если изменить направление тока в возбуждающей обмотке статора, то, согласно правилу левой руки, изменится направление вращения ротора. То же самое произойдёт, если мы поменяем местами щёточные контакты, подводящие питание от источника к якорной обмотке. А вот если поменять «+» «-» и там и там, то направление вращения вала не изменится. Поэтому, в принципе, для питания такого мотора можно использовать и переменный ток, т.к. ток в индукторе и якоре будет меняться одновременно. На практике такие устройства используются редко.
Думаю многие из вас кто баловался с движками могли заметить, что у них есть ярко выраженный пусковой ток, когда мотор на старте может рвануть стрелку амперметра, например, до ампера, а после разгона ток падает до каких-нибудь 200мА.
Почему это происходит? Это работает противоэдс. Когда двигатель стоит, то ток который через него может пройти зависит только лишь от двух параметров — напряжения питания и сопротивления якорной обмотки. Так что предельный ток который может развить движок и на который следует рассчитывать схему узнать несложно. Достаточно замерить сопротивление обмотки двигателя и поделить на это значение напряжение питания. Просто по закону Ома. Это и будет максимальный ток, пусковой.
Но по мере разгона начинается забавная вещь, обмотка якоря движется поперек магнитного поля статора и в ней наводится ЭДС, как в генераторе, но направлена она встречно той, что вращает двигатель. И в результате, ток через якорь резко снижается, тем больше, чем выше скорость.
А если движок дополнительно еще подкручивать по ходу, то противоэдс будет выше питания и движок начнет вкачивать энергию в систему, став генератором.
Что касается электрической схемы включения двигателя, то их несколько и они показаны на рисунке. При параллельном соединении обмоток, обмотка якоря делается из большого количества витков тонкой проволоки. При таком подключении коммутируемый коллектором ток будет значительно меньше из-за большого сопротивления и пластины не будут сильно искрить и выгорать. Если делать последовательное соединение обмоток индуктора и якоря, то обмотка индуктора делается из провода большего диаметра с меньшим количеством витков, т.к. весь якорный ток устремляется через статорную обмотку. При таких манипуляциях с пропорциональным изменением значений тока и количества витков, намагничивающая сила остаётся постоянной, а качественные характеристики устройства становятся лучше.
На сегодняшний день двигатели постоянного тока мало используются на производстве. Из недостатков этого типа электрических машин можно отметить быстрый износ щёточно-коллекторного узла. Преимущества – хорошие характеристики запуска, лёгкая регулировка частоты и направления вращения, простота устройства и управления.
В настоящее время двигатели постоянного тока независимого возбуждения, управляемые тиристорными преобразователями, используются в промышленных электроприводах.’Эти приводы обеспечивают регулирование скорости в широком диапазоне. Регулирование скорости вниз от номинальной осуществляется изменением напряжения на якоре, а вверх — ослаблением потока возбуждения. Ограничения, по мощности и скорости обусловлены свойствами используемых двигателей, а не полупроводниковых приборов. Тиристоры могут соединяться последовательно или параллельно, если они имеют недостаточно высокий. класс по напряжению или току. Ток якоря и момент ограничены перегрузочной способностью двигателя по нагреву.
Принцип работы:
Сборка двигателя постоянного тока ПО ДЕТАЛЯМ:
Для любопытных могу еще подробно рассказать про Миф о торсионном генераторе или например что такое Золотое сечение и симметрия. Ну и совсем для жаждущих — подробно про Термоядерный реактор ITER. Оригинал статьи находится на сайте ИнфоГлаз.рф Ссылка на статью, с которой сделана эта копия — http://infoglaz.ru/?p=32677
Как устроен и принцип действия двигателя постоянного тока (видео)
Подавляющее большинство электроприводов нашего времени использует энергию переменного тока в асинхронном режиме. Тем не менее, двигатель постоянного тока, устройство и принцип действия которого будут рассматривать в этой статье, востребован ничуть не меньше. Что он собой представляет, какие существуют теоретические и технические особенности его эксплуатации, постараемся разобраться далее.
Что такое постоянный ток и чем он отличается от переменного?
Начать рассмотрение вопроса работы эл. двигателей необходимо с того, на чем она базируется, то есть с определения понятия «электрический ток» и его основных видов. Еще со школы нам должно быть известно, что в физике электрическим током называют направленное движение заряженных частиц (электронов или ионов). Его разделение на постоянный и переменный происходит в зависимости от величины и направления тока в некотором промежутке времени. Это хорошо видно на следующем графике:
Как видим, график (красная линия) не меняется по времени, напряжение остается стабильным. В то же время, переменный ток (зеленый график) имеет форму синусоиды, постоянно меняя свое значение и направление со временем. Периодичность, с которой график проходит через одинаковые точки по ординате называется частотой и ее стандартное значение 50 Гц.
На самом деле, практически любой бытовой прибор, электроинструмент использует постоянный ток, который преобразовывается из переменного (сетевого). Может возникнуть закономерный вопрос, а для чего тогда использовать синусоидальный ток? Дело в том, что такая форма задания тока позволяет легко преобразовывать напряжение, идущее от генератора электростанции с 200-300 тысяч Вольт до привычных 220, с учетом коэффициента эффективности.
Принцип действия электродвигателя
Работа любого эл. двигателя пост. тока базируется на принципе взаимного действия магнитных полей статора и ротора. Здесь также нужно вспомнить базовую физику и историю с рамкой, вращающейся в однородном магнитном поле. Задание предполагает подачу на нее тока, индуцирующего собственное круговое магнитное поле. При взаимодействии с предыдущим формирует направленную перпендикулярно силу Ампера. Она выталкивает рамку из однородного поля.
В нашем случае, принцип действия тот же, но роль неподвижного однородного магнитного поля играет статор, а рамки – вращающийся ротор электродвигателя, обмотками, который еще называется якорем.
Как видим, два полюса статора создают однородное магнитное поле. Обмотка ротора состоит из двух частей, которые наматываются на его полюсах и соединены между собой последовательно. Концы обмоток замыкаются на разделенных, расположенных на валу электродвигателя коллекторных пластинах. Они имеют физический контакт (трение) с неподвижными щетками из графита, на которые подается пост. ток. Если при подключении соблюсти принцип расположение полюсов тока, как показано на рисунке, то полюс якоря, расположенный на схеме слева, станет условно северным, как и находящийся в непосредственной близости полюс статора электродвигателя.
Естественная реакция на действие магнитных сил заключается в том, что равнозначные полюса отталкиваются. В нашем случае такое возможно только за счет вращения. По инерции, северный полюс якоря, провернувшись на 180º станет напротив южного полюса статора. По логике вещей они должны начать притягиваться, что приведет к торможению. Чтобы этого не допустить, в момент перехода нейтральной линии коллектор переключает обмотки якоря местами, чтобы вновь организовать отторжение полюсов.
Учитывая эту информацию устройство двигателя постоянного тока можно изобразить следующим образом:
Характеристики эл. двигателя
Любой электродвигатель – это оборудование, которым можно и нужно управлять в зависимости от требуемых условий. Регулирование происходит одним из трех основных способов/принципов:
- Изменение напряжения, которое подается на обмотки ротора,
- Ввод в цепь дополнительного сопротивления,
- Изменения возбуждения (величины потока).
Работа эл. двигателя оценивается по графикам характеристик, которые бывают:
- Механическими. Представляют собой зависимость частоты/скорости вращения от момента на валу с учетом поправочного коэффициента,
- Регулировочными. Зависимость частоты вращения от напряжения в цепи питания обмоток якоря, сопротивления или потока.
На графике механической характеристики откладываются значения частоты вращения (ось ординат) и момента (ось абсцисс). По форме она представляет прямую с отрицательным уклоном. Построение графика происходит для определенной величины напряжения. Базовым уравнением механической характеристики является:
где ω – скорость вращения якоря, U – напряжение якорной цепи, К – конструктивный коэффициент, Ф – значение потока, RЯ – активное сопротивление якорной обмотки, М – электромагнитный момент электродвигателя.
В отличие от нее, график регулировочной характеристики строится для определенного момента на валу (ось абсцисс). На оси ординат по-прежнему находится частота. Для каждого из видов регулирования электродвигателя, уравнение будет иметь отдельную форму:
- Уравнение при регулировании напряжением:
- Уравнение при реостатном регулировании (сопротивлением):
- Уравнение при потоковом регулировании:
Сравнительный вид графиков представлен ниже:
Также следует напомнить, что механические характеристики могут быть естественными (снятые при номинальном режиме) или искусственными (получаются при изменении напряжения, сопротивления или потока).
Режимы работы эл. двигателей
Используя уже известный нам график для характеристик, но расширив его на четыре квадранта, можно оценить существующие режимы работы оборудования.
Нумерация квадрантов происходит против часовой стрелки, начиная с правого верхнего, в котором координаты по обеим осям идут со знаком «+». Как видно из графика, в первом и третьем квадрантах наблюдается двигательный режим, для которого мощность Р = М·ω >, 0. В двух других квадрантах реализуется режим генератора или тормозной, имеющий отрицательное значение мощности.
Как видим, график образует несколько характерных точек и зон, ответственных за отдельные режимы:
- Холостой ход. Образуется в точке ωо. В этом случае ток и момент равны нулю, а сам эл. двигатель не получает энергии,
- Генератор при параллельном подключении. Называется еще тормозным с рекуперацией в сеть. Реализуется при ω >, ωо и E >, U. Эл. двигатель получает механическую энергию от работающего оборудования, а в сеть взамен отдается электрическая (генератор тока),
- Короткое замыкание. В этом случае ω = 0 и Е = 0. Механическая энергия от вращения вала не отдается, а электрическая превращается в тепловую,
- Генератор при последовательном соединении. Этот режим еще называется торможением с противовключением. При этом ω <, 0, а ток и ЭДС имеют одинаковое направление. Выработка электричества происходит за счет вращения оборудования, совмещенного с валом ротора,
- Автономный генератор. Режим динамического торможения предполагает выработку электричества за счет одной лишь механической энергии вращения вала от привода, без участия сети.
Технические и энергетические параметры функционирования двигателей постоянного тока позволяют с большой эффективностью использовать их в разных сферах, от машиностроения до легкой промышленности и даже игрушек. Они могут действовать в чисто двигательном или режиме генератора (тормозном), используя различные коэффициенты.
Принцип работы двигателя постоянного тока
Двигатель постоянного тока — это устройство, преобразующее постоянный ток в механическую работу. Он работает по принципу закона Лоренца, который гласит, что « проводник с током, помещенный в магнитное и электрическое поле, испытывает силу ». Опытная сила называется силой Лоренца. Правило левой руки Флемминга определяет направление силы.
Правило левой руки Флеминга
Если большой, средний и указательный пальцы левой руки смещены друг относительно друга на угол 90 °, средний палец представляет направление магнитного поля.Указательный палец показывает направление тока, а большой палец показывает направление сил, действующих на проводник.
Формула рассчитывает величину силы,
Прежде чем понять принцип работы двигателя постоянного тока, мы должны сначала узнать о его конструкции. Якорь и статор — две основные части двигателя постоянного тока. Якорь — это вращающаяся часть, а статор — их неподвижная часть. Катушка якоря подключена к источнику постоянного тока.
Катушка якоря состоит из коммутаторов и щеток. Коммутаторы преобразуют переменный ток, индуцированный в якоре, в постоянный, а щетки передают ток от вращающейся части двигателя к неподвижной внешней нагрузке. Якорь размещается между северным и южным полюсами постоянного или электромагнита.
Для простоты предположим, что якорь имеет только одну катушку, которая расположена между магнитным полем, показанным ниже на рисунке A.Когда на катушку якоря подается постоянный ток, через нее начинает течь ток. Этот ток создает вокруг катушки собственное поле.
На рисунке B показано поле, индуцируемое вокруг катушки:
В результате взаимодействия полей (создаваемых катушкой и магнитом) результирующее поле развивается поперек проводника. Результирующее поле стремится вернуться в исходное положение, то есть на оси основного поля. Поле оказывает силу на концах проводника, и, таким образом, катушка начинает вращаться.
Пусть поле, создаваемое основным полем, будет F m , и это поле вращается по часовой стрелке. Когда в катушке течет ток, они создают собственное магнитное поле, скажем, F r . Поле F r пытается продвинуться в направлении основного поля. Тем самым крутящий момент действует на катушку якоря.
Настоящий двигатель постоянного тока состоит из большого количества катушек якоря. Скорость двигателя прямо пропорциональна количеству катушек, используемых в двигателе. Эти катушки удерживаются под воздействием магнитного поля.
Один конец проводов находится под влиянием северного полюса, а другой конец — под влиянием южного полюса. Ток входит в катушку якоря через северный полюс и движется наружу через южный полюс.
Когда катушка перемещается от одной щетки к другой, одновременно меняется и полярность катушки. Таким образом, направление силы или крутящего момента, действующего на катушку, остается неизменным.
Вращающий момент, создаваемый в катушке, становится нулевым, когда катушка якоря перпендикулярна основному полю. Нулевой крутящий момент означает, что двигатель перестает вращаться. Для решения этой проблемы в роторе используется номер обмотки якоря. Таким образом, если одна из их катушек перпендикулярна полю, то другие катушки создают крутящий момент. И ротор движется непрерывно.
Кроме того, для получения постоянного крутящего момента устройство выдерживается таким образом, что всякий раз, когда катушки пересекают магнитную нейтральную ось магнита, направление тока в катушках становится обратным.Это можно сделать с помощью коммутатора.
Двигатели постоянного тока| Принцип работы | Ресурсы для инженеров
Электродвигатели, работающие на электромагнетизме. Однако существуют и другие типы двигателей, в которых используются электростатические силы или пьезоэлектрический эффект. В случае двигателя PMDC (постоянного магнита постоянного тока) движение создается электромагнитом (якорем), взаимодействующим с магнитом с фиксированным полем (корпус в сборе).
В щеточном двигателе электрический ток протекает через клеммы двигателя в узле торцевой крышки, который входит в контакт с коммутатором в узле якоря через угольные щетки или щеточные листы.Электрический ток питает катушки, создавая магнитное поле, заставляющее якорь вращаться, когда он взаимодействует с магнитами, заключенными в корпус в сборе. Правило левой руки Флемминга помогает определить направление силы, тока и магнитного потока.
В бесщеточном двигателе, когда электричество подается на вывод двигателя, ток течет через фиксированное поле статора и взаимодействует с движущимся постоянным магнитом или движущимся индуцированным магнитным полем внутри ротора / якоря.После того, как движение и силовая нагрузка будут удовлетворены доступным источником тока, он возвращается обратно к источнику, выходящему из двигателя.
Ключевые элементы, взаимодействующие для создания движения
Магнитный поток — Двигатель может иметь катушку с фиксированной обмоткой или статор с постоянным магнитом, а также якорь с подвижной обмоткой или ротор с постоянными магнитами, которые будут иметь взаимодействующие поля магнитного потока для создания силы и движения.
Сила — Величина тока, протекающего через электромагнитное поле, пропорциональна величине силы взаимодействующего электромагнитного поля, необходимой для достижения противоположной рабочей нагрузки.Помимо силы и движения, необходимых для устройства, необходимо учитывать любую потерю эффективности при преобразовании электроэнергии в механическую работу (ватты).
Обзор шагового двигателя
Что такое шаговый двигатель
Шаговые двигатели работают иначе, чем другие двигатели постоянного тока, которые просто вращаются при подаче напряжения. Вращательный шаговый двигатель — это электромеханическое устройство, которое может разделить один полный оборот (360 °) на большое количество шагов вращения. Шаговые двигатели управляются электроникой и не требуют дорогостоящих устройств обратной связи.Линейный шаговый двигатель подобен вращающемуся двигателю, за исключением того, что вал движется линейно или продольно. Оба типа имеют две схемы обмотки для своих электромагнитных катушек: униполярную и биполярную. Униполярный означает, что каждый конец катушки имеет одну полярность. Рекомендуемый стабилитрон используется для обеспечения быстрого спада тока в отключенной катушке. Это приведет к увеличению крутящего момента двигателя, особенно на более высоких частотах.
Биполярный означает, что каждый конец катушки имеет обе полярности.Катушка будет положительной и отрицательной во время каждого цикла движения. Поскольку каждая катушка используется полностью, двигатель имеет более высокий крутящий момент по сравнению с униполярной катушкой. Биполярный драйвер может включать в себя возможность управления постоянным током, называемую приводом прерывателя. Это обеспечит увеличенный выходной крутящий момент на более высоких частотах и снизит влияние колебаний температуры и напряжения питания.
Основы шагового двигателя
Шаговый двигатель PM или «консервная банка» — это недорогое решение для ваших приложений позиционирования с типичными углами шага 7.5 ° — 15 °. Меньшие углы шага можно получить с помощью Microstepping. Вал двигателя перемещается с определенным шагом при подаче электрических управляющих импульсов. Текущая полярность и частота подаваемых импульсов определяют направление и скорость движения вала.
Одним из наиболее значительных преимуществ шагового двигателя является его способность точно регулироваться в системе с разомкнутым контуром. Управление без обратной связи означает, что обратная связь о положении вала не требуется.Этот тип управления устраняет необходимость в дорогостоящих устройствах обратной связи, просто отслеживая входные ступенчатые импульсы. Шаговый двигатель — хороший выбор, когда требуется контролируемое движение. Они рекомендуются в приложениях, где необходимо контролировать угол поворота, скорость, положение и синхронизм. Возможности фиксации, удержания, втягивания и извлечения крутящего момента, скорости (об / мин) и шагов на оборот (угол шага) характеризуют шаговый двигатель.
Момент фиксации — определяет максимальный крутящий момент, который может быть приложен к обесточенному двигателю, не вызывая вращения двигателя.
Удерживающий момент — определяет максимальный крутящий момент, с которым двигатель под напряжением может быть нагружен, не вызывая вращательного движения.
Pull-In — производительность определяет способность двигателя запускаться или останавливаться. Это максимальная частота, при которой двигатель может запускаться или останавливаться мгновенно, с приложенной нагрузкой, без потери синхронизации.
Pull-Out определяет максимальный крутящий момент при применении рампы ускорения / замедления без потери шагов.Он определяет максимальную частоту, на которой двигатель может работать без потери синхронизма.
Наш шаговый двигатель можно комбинировать с полной линейкой редукторов для увеличения крутящего момента и снижения скорости.
Как работает двигатель постоянного тока?
Теоретически одна и та же машина постоянного тока может использоваться в качестве двигателя или генератора. Следовательно, конструкция двигателя постоянного тока такая же, как и у генератора постоянного тока.
Принцип работы двигателя постоянного тока
Электродвигатель — это электрическая машина, преобразующая электрическую энергию в механическую.Основной принцип работы двигателя постоянного тока : « всякий раз, когда токопроводящий проводник помещается в магнитное поле, он испытывает механическую силу». Направление этой силы задается правилом левой руки Флеминга, а ее величина определяется как F = BIL. Где B = плотность магнитного потока, I = ток и L = длина проводника в магнитном поле.
Правило левой руки Флеминга : Если мы вытянем первый, второй и большой пальцы левой руки перпендикулярно друг другу, а направление магнитного поля будет представлено первым пальцем, направление тока будет представлено как второй палец, затем большой палец представляет направление силы, действующей на проводник с током.
| Анимация: Работа двигателя постоянного тока (кредит: Lookang) |
Анимация, приведенная выше, помогает понять принцип работы двигателя постоянного тока . Когда обмотки якоря подключены к источнику постоянного тока, в обмотке возникает электрический ток. Магнитное поле может создаваться обмоткой возбуждения (электромагнетизм) или постоянными магнитами. В этом случае проводники якоря с током испытывают действие магнитного поля в соответствии с принципом, изложенным выше.
Коммутаторвыполнен сегментированным для достижения однонаправленного крутящего момента. В противном случае направление силы менялось бы каждый раз, когда направление движения проводника менялось на противоположное в магнитном поле. Так работает двигатель постоянного тока !
Задняя ЭДС
Согласно фундаментальным законам природы, преобразование энергии невозможно, пока не появится что-то, что препятствует преобразованию. В случае генераторов это противодействие обеспечивается магнитным сопротивлением, а в случае двигателей постоянного тока — противоэдс .
Когда якорь двигателя вращается, проводники также разрезают линии магнитного потока и, следовательно, согласно закону электромагнитной индукции Фарадея, в проводниках якоря индуцируется ЭДС. Направление этой наведенной ЭДС таково, что она противодействует току якоря (I a ). На схеме ниже показано направление обратной ЭДС и тока якоря . Величина обратной ЭДС может быть задана уравнением ЭДС генератора постоянного тока.
Значение обратной ЭДС:
Величина обратной ЭДС прямо пропорциональна скорости двигателя. Представьте, что нагрузка на двигатель постоянного тока внезапно уменьшилась. В этом случае требуемый крутящий момент будет мал по сравнению с текущим крутящим моментом. Скорость двигателя начнет увеличиваться из-за превышения крутящего момента. Следовательно, величина обратной ЭДС пропорциональна скорости. С увеличением обратной ЭДС ток якоря начнет уменьшаться. Поскольку крутящий момент пропорционален току якоря, он также будет уменьшаться, пока не станет достаточным для нагрузки.Таким образом, скорость мотора будет регулироваться.
С другой стороны, если двигатель постоянного тока внезапно нагружается, эта нагрузка вызовет снижение скорости. Из-за уменьшения скорости обратная ЭДС также уменьшится, что приведет к увеличению тока якоря. Повышенный ток якоря увеличит крутящий момент, чтобы удовлетворить требованиям нагрузки. Следовательно, наличие обратной ЭДС делает двигатель постоянного тока «саморегулирующимся» .
Типы двигателей постоянного тока
Двигатели постоянного тока обычно классифицируются в зависимости от конфигурации возбуждения:- С отдельным возбуждением (обмотка возбуждения питается от внешнего источника)
- с самовозбуждением —
- Последовательная обмотка (обмотка возбуждения включена последовательно с якорем)
- Шунтовая обмотка (обмотка возбуждения включена параллельно якорю)
- Сложная рана —
См. Схему классификации машин постоянного тока здесь.
Принцип работы двигателя постоянного тока
Двигатель постоянного тока — это электрическая машина, которая преобразует электрическую энергию в механическую энергию .
Работа двигателя постоянного тока основана на том принципе, что когда проводник с током помещается в магнитное поле, он испытывает механическую силу.
Направление механической силы задается Правилом левой руки Флеминга , а ее величина определяется как F = BIL Ньютон.
Принципиальной разницы в конструкции генератора постоянного тока и двигателя постоянного тока нет.Фактически, одна и та же машина постоянного тока может использоваться взаимозаменяемо как генератор или как двигатель.
Как и генераторы, существуют различные типы двигателей постоянного тока, которые также подразделяются на электродвигатели постоянного тока с параллельной обмоткой, с последовательной обмоткой и электродвигатели постоянного тока с комбинированной обмоткой .
Двигатели постоянного тока редко используются в обычных приложениях, потому что все компании, занимающиеся электроснабжением, поставляют переменный ток.
Однако для специальных применений, таких как сталелитейные заводы , шахты и электрические поезда , выгодно преобразовывать переменный ток в постоянный, чтобы использовать двигатели постоянного тока.Причина в том, что скорость / крутящий момент характеристики двигателей постоянного тока намного лучше, чем у двигателей переменного тока.
Поэтому неудивительно, что для промышленных приводов двигатели постоянного тока так же популярны, как и трехфазные асинхронные двигатели.
Принцип действия двигателя постоянного тока
Машина, преобразующая электрическую мощность постоянного тока в механическую, известна как двигатель постоянного тока.
Работа двигателя постоянного тока основана на том принципе, что когда проводник с током помещается в магнитное поле, на проводник действует механическая сила.
Направление этой силы задается правилом левой руки Флеминга , а величина — выражением;
F = BIL ньютонов
Согласно правилу левой руки Флеминга, когда электрический ток проходит через катушку в магнитном поле, магнитная сила создает крутящий момент, который вращает двигатель постоянного тока.
Направление этой силы перпендикулярно как проводу, так и магнитному полю.
Правило левой руки FlemingsВ принципе, конструктивных различий между двигателем постоянного тока и генератором постоянного тока нет.Та же машина постоянного тока может работать как генератор или двигатель.
Поперечное сечение машины постоянного тока
Работа двигателя постоянного тока
Рассмотрим часть многополюсного двигателя постоянного тока , как показано на рисунке ниже. Когда клеммы двигателя подключены к внешнему источнику питания постоянного тока:
- возбуждаются полевых магнитов , образуя чередующиеся северный и южный полюса ,
- , проводников якоря проводят ток.
Все проводники под северным полюсом несут ток в одном направлении, а все проводники под южным полюсом несут токи в противоположном направлении.
Проводники якоря под N-полюсом переносят токи в плоскость бумаги (обозначенную на рисунке как ⊗). А проводники под S-полюсом выводят токи из плоскости бумаги (обозначенной на рисунке как ⨀).
Поскольку каждый проводник якоря проводит ток и находится в магнитном поле, на него действует механическая сила .
При применении правила левой руки Флеминга становится ясно, что сила, действующая на каждый проводник, имеет тенденцию вращать якорь против часовой стрелки.Все эти силы в сумме дают крутящего момента , который заставляет якорь вращаться.
Когда проводник перемещается от одной стороны щетки к другой, ток в этом проводнике меняется на противоположный. В то же время он попадает под влияние следующего полюса противоположной полярности. Следовательно, направление силы на проводник остается тем же .
Следует отметить, что функция коммутатора в двигателе такая же, как и в генераторе.Путем изменения направления тока в каждом проводнике, когда он проходит от одного полюса к другому, он помогает развивать постоянный и однонаправленный крутящий момент .
Видеоанимация
Далее: Обратная ЭДС в двигателе постоянного тока
Принцип работы двигателя постоянного тока
Здравствуйте, друзья, мы делаем серию блогов о двигателях постоянного тока. В этом первом блоге мы говорим о принципе работы двигателя постоянного тока, как они работают? Также мы поговорим о конструкции двигателя постоянного тока.
Что такое двигатель постоянного тока?
Двигатель постоянного тока — это двигатель, который преобразует постоянный ток в механическую работу.Он работает по принципу закона Лоренца, который гласит, что «проводник с током, помещенный в магнитное и электрическое поле, испытывает силу». И эта сила — сила Лоренца.
Типы двигателей постоянного тока
Существует 4 основных типа двигателей постоянного тока, а именно:
- Двигатель постоянного тока серии
- Двигатель постоянного тока с постоянным магнитом
- Шунтирующий / параллельный двигатель постоянного тока
- Комбинированные двигатели постоянного тока
ДОЛЖЕН ПРОЧИТАТЬСЯ НА ДВИГАТЕЛЯХ ПОСТОЯННОГО ТОКА:
Конструкция двигателя постоянного тока
Прежде чем понять принцип работы двигателей постоянного тока, мы должны узнать об их конструкции.Есть две основные части двигателя постоянного тока.
Вращающаяся часть — это якорь, а Статор — их неподвижная часть. Катушка якоря подключена к источнику постоянного тока.
Катушка якоря состоит из коммутаторов и щеток. Коммутатор преобразует индукцию переменного тока в якоре в постоянный ток, а щетки передают ток от вращающейся части двигателя к неподвижной внешней нагрузке. Якорь располагается между северным и южным полюсами постоянного или электромагнита.
Принцип работы двигателя постоянного тока
Двигатель постоянного тока — это электрическая машина, преобразующая электрическую энергию в механическую. Основной принцип работы двигателя постоянного тока заключается в том, что всякий раз, когда проводник с током попадает в магнитное поле, он испытывает механическую силу.
Правило левой руки Флеминга и его величина определяют направление этой силы.
Правило левой руки Флеминга :
Если мы растянем первый, второй и большой пальцы левой руки так, чтобы они были перпендикулярны друг другу, и первый палец представляет направление магнитного поля, второй палец представляет направление тока, тогда большой палец представляет направление силы, действующей на проводник с током.
F = BIL ньютонов
Где,
B = плотность магнитного потока,
I = ток и
L = длина проводника в магнитном поле.
Когда обмотка якоря подключена к источнику постоянного тока, в обмотке возникает электрический ток. Постоянные магниты или обмотка возбуждения (электромагнетизм) создают магнитное поле. В этом случае проводники якоря с током испытывают действие магнитного поля в соответствии с принципом, изложенным выше.
Коммутатор сделан сегментированным для достижения однонаправленного крутящего момента. В противном случае направление силы менялось бы каждый раз, когда направление движения проводника менялось на противоположное в магнитном поле. Вот как работает двигатель постоянного тока!
Обратная ЭДС двигателя постоянного тока
Согласно основному закону природы, преобразование энергии невозможно, пока не появится что-то, что препятствует преобразованию. В случае генераторов магнитное сопротивление обеспечивает это противодействие, но в случае двигателей постоянного тока возникает обратная ЭДС.Наличие обратной ЭДС делает двигатель постоянного тока «саморегулирующимся».
Когда якорь двигателя вращается, проводники также разрезают линии магнитного потока и, следовательно, согласно закону электромагнитной индукции Фарадея, в проводниках якоря индуцируется ЭДС.
Направление этой наведенной ЭДС таково, что она противодействует току якоря (I a ). На схеме ниже показано направление обратной ЭДС и тока якоря.
Значение обратной ЭДС
Величина обратной ЭДС прямо пропорциональна скорости двигателя.Представьте, что нагрузка на двигатель постоянного тока внезапно уменьшилась. В этом случае требуемый крутящий момент будет мал по сравнению с текущим крутящим моментом. Скорость двигателя начнет увеличиваться из-за превышения крутящего момента. Следовательно, величина обратной ЭДС пропорциональна скорости. С увеличением обратной ЭДС ток якоря начнет уменьшаться. Поскольку крутящий момент пропорционален току якоря, он также будет уменьшаться, пока не станет достаточным для нагрузки. Таким образом, скорость мотора будет регулироваться.
С другой стороны, если двигатель постоянного тока внезапно нагружается, эта нагрузка вызовет снижение скорости. Из-за уменьшения скорости уменьшается и обратная ЭДС, что позволяет увеличить ток якоря. Из-за увеличения тока якоря крутящий момент будет увеличиваться для удовлетворения требований нагрузки.
Надеюсь, эта статья поможет вам понять принцип работы двигателя постоянного тока.
Мы в Robu.in надеемся, что вам было интересно, и что вы вернетесь к другим нашим образовательным блогам.
|
Двигатель постоянного тока (DC) — одна из первых машин, предназначенных для преобразования электроэнергии в механическую. Постоянный магнит (ПМ) постоянного тока преобразует электрическую энергию в механическую за счет взаимодействия двух магнитных полей.
Одно поле создается узлом постоянного магнита, другое поле создается электрическим током, протекающим в обмотках двигателя.Эти два поля приводят к крутящему моменту, который стремится вращать ротор. Когда ротор вращается, ток в обмотках коммутируется, чтобы обеспечить постоянный выходной крутящий момент. Стационарное электромагнитное поле двигателя также может быть намотано проволокой, как якорь (так называемый двигатель с возбужденным полем), или может состоять из постоянных магнитов (называемых постоянным магнитом.
мотор).
Помимо щеточных двигателей постоянного тока, существует еще один тип двигателя постоянного тока: бесщеточный двигатель постоянного тока. Бесщеточные двигатели постоянного тока используют внешний силовой привод для коммутации неподвижной медной обмотки статора. Это изменяющееся поле статора заставляет вращаться ротор с постоянным магнитом. Бесщеточный двигатель с постоянными магнитами — самый эффективный.
двигатель с точки зрения крутящего момента / веса или эффективности.Бесщеточные двигатели обычно являются самым дорогим типом двигателей. Бесщеточные двигатели постоянного тока с электронной коммутацией широко используются в качестве приводов нагнетателей и вентиляторов в электронике, телекоммуникациях и промышленном оборудовании. Существует большое количество различных бесщеточных двигателей для различных областей применения. Некоторые из них предназначены для вращения с постоянной скоростью (те, что используются в дисковых накопителях), а скорость некоторых можно контролировать.
изменяя приложенное к ним напряжение (обычно это двигатели, используемые в вентиляторах).Некоторые бесщеточные двигатели постоянного тока имеют встроенный тахометр, который выдает импульсы при вращении двигателя (это относится как к двигателям дисководов, так и к некоторым вентиляторам компьютеров). Как правило, пользователи выбирают электродвигатели постоянного тока щеточного типа, когда низкая стоимость системы является приоритетом, и бесщеточные электродвигатели для удовлетворения других требований (таких как работа без обслуживания, высокие скорости и взрывоопасные среды, где искрение может быть опасным). Тип кисти DC
двигатели используются во многих устройствах с батарейным питанием. Бесщеточные двигатели постоянного тока обычно используются в таких приложениях, как вентиляторы с питанием от постоянного тока и двигатели вращения дисков. |
Электродвигатель постоянного тока Принцип работы, конструкция и пояснения к схемам
Очень важно знать принцип работы и конструкцию двигателя постоянного тока, чтобы освоить основы двигателей постоянного тока. Двигатель постоянного тока преобразует электрическую энергию в механическую. Входная электрическая энергия получается от аккумуляторных батарей, солнечных элементов и т. Д. Генерируемая механическая энергия в дальнейшем используется для вращения насосов, вентиляторов, компрессоров, колес и т. Д.
Как правило, двигатели переменного тока широко используются в промышленности. Но когда дело доходит до высокого пускового момента или эффективного управления скоростью, двигатели постоянного тока являются оптимальным выбором. Они используются в алюминиевых прокатных станах, электрических лифтах, железнодорожных локомотивах и крупном землеройном оборудовании.
ПРИНЦИП РАБОТЫ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА:
Принцип работы двигателя постоянного тока заключается в том, что проводник с током испытывает механическую силу, когда помещается в магнитное поле. Это известно как сила Лоренца.И направление этой силы задает ПРАВИЛО ЛЕВОЙ РУКИ ФЛЕМИНГА.
Принцип работы двигателя постоянного токааналогичен принципу работы генератора постоянного тока.
ПРАВИЛО ДЛЯ ЛЕВОЙ РУКИ ФЛЕМИНГА
Если растянуть указательный, средний и большой пальцы левой руки перпендикулярно друг другу. Если указательный палец указывает направление магнитного поля, средний палец указывает направление тока через проводник, то большой палец указывает направление силы, действующей на проводник.
Правило левой руки Флеминга
** Читайте также: Принцип работы двигателя переменного тока
КОНСТРУКЦИЯ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
Все машины постоянного тока в основном состоят из двух частей. Один — это статор , а другой — Ротор . Статор — это неподвижная часть, которая включает ярмо, полюс, обмотку полюса и межполюсные полюса. Статор создает магнитный поток.
Ротор машины постоянного тока состоит из коллектора, щеток, компенсационной обмотки и вала.Он вращается во внешнем магнитном потоке (создаваемом статором), когда в нем протекает ток.
Конструкция двигателя постоянного тока
ЧАСТИ СТАТОРА: —
ХОМУТ:
Ярмо или внешняя рама обеспечивает защиту двигателя постоянного тока. Он изготовлен из литой стали для больших двигателей постоянного тока. А из чугуна для малых двигателей постоянного тока. Ярмо используется в машине постоянного тока, потому что:
A) Обеспечивает механическую поддержку полюсов.
B) Действует как защитное покрытие от механических повреждений.
C) И обеспечивает проход для магнитного потока, создаваемого полюсами машины.
Ярмо
СЕРДЕЧНИК И ОБУВЬ ПОЛЮСА:
Как полюсный сердечник, так и полюсные наконечники изготовлены из литой стали. Но полюсные башмаки ламинированные, так как они расположены близко к арматуре.
Если нагрузка изменяется во время работы двигателя постоянного тока, изменяется ток якоря. В результате меняется и магнитный поток. Этот поток связывает полюсный башмак и вызывает протекание вихревого тока .А чтобы свести к минимуму эти вихревые токи, полюсные наконечники ламинированы.
Основное назначение полюсного башмака — распределение магнитного потока и уменьшение магнитного сопротивления магнитного пути. В то время как полюсный сердечник возбуждается обмоткой возбуждения и используется для их поддержки.
Опорный сердечник и полюсный башмак
ПОЛЮСНАЯ НАМОТКА ИЛИ ПОЛЕВЫЕ КАТУШКИ
Обмотка полюса и катушки возбуждения состоят из медного провода, размещенного вокруг сердечника полюса. Когда ток проходит через эти катушки, они намагничивают полюс, который создает магнитный поток.Этот поток проходит через ротор и создает вращающий момент, как только ток начинает течь в якоре ротора.
Обмотка возбуждения на полюсах
ЧАСТИ РОТОРА: —
ЯДЕР АРМАТУРЫ
Сердечник якоря — это вращающаяся часть машины постоянного / переменного тока. Изготовлен из кремнистой стали . Цилиндрическая конструкция имеет многослойную структуру для уменьшения потерь на вихревые токи. Его основная цель — обеспечить путь магнитного потока с низким сопротивлением. И для размещения проводников арматуры.
АРМАТУРА ОБМОТКА
Обмотка якоря состоит из катушек, встроенных в пазы сердечника якоря. Эти катушки выложены рядом друг с другом из прочного изоляционного материала. Изоляционный материал предотвращает короткое замыкание двух соседних катушек.
В то время как изоляция паза наматывается на провод якоря и прочно закрепляется деревянными или фибровыми клиньями. Проще говоря, это расположение проводников с током, которые создают ЭДС в машине из-за относительного движения между обмотками и основным полем.
Обмотка якоряКОММУТАТОР
Коммутатор содержит жестко вытянутые медные сегменты клиновидной формы, образующие цилиндрическую конструкцию. Тонкий лист высококачественной слюды изолирует сегменты друг от друга.
Коммутатор периодически меняет направление тока между ротором и внешней цепью. Следовательно, он действует как переключатель, вызывающий однонаправленный крутящий момент в двигателе постоянного тока.
Коммутатор Кольцо
ЩЕТКИ
Щетки обычно изготавливаются из угольных блоков прямоугольной формы, помещенных в щеткодержатели.Функция щеток в двигателях постоянного тока заключается в подаче тока на коммутатор от внешнего источника постоянного тока.
В то время как функция щеток в генераторе постоянного тока состоит в том, чтобы собирать ток от коммутатора и подавать его во внешнюю цепь нагрузки.
Пара угольных щеток
РАБОТА ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
Принцип работы двигателя постоянного тока требует наличия магнитного потока и токоведущего проводника. Рассмотрим катушку, пропускающую постоянный ток через коммутатор и щетки.Эти сегменты коммутатора свободно вращаются вокруг своей оси.
Работа двигателя постоянного тока
Сегмент коммутатора, который соприкасается с левой щеткой, получает положительную полярность, а правый — отрицательную. Это приводит к протеканию тока в катушке.
Применяя правило левой руки Флеминга, проводник на левой стороне всегда испытывает силу, направленную вверх, в то время как проводник на правой стороне испытывает силу, направленную вниз.
