Какие бывают виды электрических исполнительных механизмов. Как устроены и работают электромагнитные и электродвигательные механизмы. Где применяются электрические исполнительные механизмы в промышленности. Какие преимущества имеют электрические приводы перед другими типами.
Виды электрических исполнительных механизмов
Электрические исполнительные механизмы подразделяются на два основных типа:
- Электромагнитные
- Электродвигательные
Электромагнитные механизмы являются наиболее простыми и быстродействующими. Их используют для управления различными клапанами, вентилями, золотниками. По виду движения исполнительного органа они бывают:
- С прямолинейным движением
- С вращательным движением (электромагнитные муфты)
Электродвигательные механизмы состоят из электродвигателя, редуктора и тормоза. Они способны обеспечивать более точное позиционирование и регулирование.
Принцип работы электромагнитных механизмов
Основными элементами электромагнитного механизма являются:
- Катушка
- Подвижный сердечник
- Возвратная пружина
- Шток
При подаче тока на катушку возникает магнитное поле, которое притягивает подвижный сердечник. Сердечник через шток передает усилие на регулирующий орган. При снятии тока возвратная пружина возвращает механизм в исходное положение.
Виды электромагнитных механизмов
По характеру движения сердечника электромагнитные механизмы подразделяются на:
- Тянущие
- Толкающие
- Поворотные
- Удерживающие
- Реверсивные
По количеству позиций выходного элемента различают:
- Однопозиционные
- Двухпозиционные
- Трехпозиционные
Электромагнитные муфты
Электромагнитные муфты являются связующим звеном между приводом и регулирующим органом. Основные виды:
- Фрикционные
- Порошковые
- Муфты скольжения
Электромагнитные муфты обладают высоким быстродействием, обеспечивают плавный пуск и регулирование скорости.
Электродвигательные механизмы
В качестве исполнительных двигателей в электродвигательных механизмах используются:
- Двухфазные асинхронные двигатели
- Синхронные шаговые двигатели
- Двигатели постоянного тока
Исполнительные двигатели обычно имеют две обмотки — возбуждения и управления. Обмотка возбуждения находится под постоянным напряжением, а на обмотку управления подается сигнал для вращения вала.

Преимущества электрических приводов
По сравнению с пневматическими и гидравлическими, электрические приводы имеют ряд преимуществ:
- Высокая точность позиционирования
- Возможность программирования сложных профилей движения
- Энергоэффективность
- Отсутствие утечек рабочей среды
- Простота обслуживания
- Возможность работы в широком диапазоне скоростей
Применение электрических исполнительных механизмов
Электрические исполнительные механизмы широко применяются в различных отраслях промышленности:
- В системах автоматического регулирования технологических процессов
- Для управления запорной и регулирующей арматурой
- В роботизированных комплексах и станках с ЧПУ
- В упаковочном и фасовочном оборудовании
- В пищевой и фармацевтической промышленности
- В системах вентиляции и кондиционирования
Как выбрать электрический исполнительный механизм?
При выборе электрического исполнительного механизма необходимо учитывать следующие факторы:
- Требуемое усилие или крутящий момент
- Скорость и точность позиционирования
- Режим работы (кратковременный или длительный)
- Условия эксплуатации (температура, влажность, агрессивная среда)
- Напряжение питания
- Способ управления (аналоговый, дискретный, цифровой)
Правильный выбор исполнительного механизма позволит обеспечить надежную и эффективную работу всей системы автоматизации.
Тенденции развития электрических приводов
Современные тенденции в развитии электрических исполнительных механизмов включают:
- Повышение энергоэффективности
- Интеграция интеллектуальных функций диагностики
- Применение новых материалов для снижения массы и габаритов
- Разработка безредукторных конструкций на основе линейных двигателей
- Повышение точности позиционирования
- Расширение диапазона рабочих температур
Постоянное совершенствование электрических приводов расширяет сферу их применения, позволяя заменять пневматические и гидравлические системы во многих областях.
Заключение
Электрические исполнительные механизмы играют важную роль в современных системах автоматизации. Они обеспечивают высокую точность, надежность и гибкость управления. Правильный выбор и грамотная эксплуатация электроприводов позволяет повысить эффективность технологических процессов и качество выпускаемой продукции.
Выберите продукцию из спискаНормирующие преобразователи измерительные …НПСИ-ТП нормирующий преобразователь сигналов термопар и напряжения …НПСИ-ТС нормирующий преобразователь сигналов термосопротивлений …НПСИ-150-ТП1 нормирующий преобразователь сигналов термопар и напряжения …НПСИ-150-ТС1 нормирующий преобразователь сигналов термометров сопротивления …НПСИ-110-ТП1 нормирующий преобразователь сигналов термопар и напряжения …НПСИ-110-ТС1 нормирующий преобразователь сигналов термометров сопротивления …НПСИ-250/500-УВ1.1 преобразователь сигналов термопар, термосопротивлений и потенциометров…НПСИ-250/500-УВ1.2 преобразователь сигналов термопар, термосопротивлений и потенциометров, разветвитель «1 в 2» …НПСИ-230-ПМ10 нормирующий преобразователь сигналов потенциометров …НПСИ-200-ГРТП модули гальванической развязки токовой петли…НПСИ-200-ГР1/ГР2 модули гальванической развязки токового сигнала (4…20) мА. |
 ..НПСИ-200-ГР1.2 модуль разветвления 1 в 2 и гальванической развязки сигнала (4…20) мА…НПСИ-ДНТВ нормирующий преобразователь действующих значений напряжения и тока…НПСИ-ДНТН нормирующий преобразователь действующих значений напряжения и тока …НПСИ-200-ДН/ДТ нормирующие преобразователи действующих значений напряжения и тока…НПСИ-МС1 преобразователь мощности, напряжения, тока, коэффициента мощности…НПСИ-500-МС3 измерительный преобразователь параметров трёхфазной сети с RS-485 и USB …НПСИ-500-МС1 измерительный преобразователь параметров однофазной сети с RS-485 и USB …НПСИ-230-УНТ нормирующий измерительный преобразователь унифицированных сигналов с сигнализацией…НПСИ-ЧВ/ЧС нормирующие преобразователи частоты, периода, длительности сигналов, частоты сети…ПНТ-х-х нормирующий преобразователь сигналов термопар…ПСТ-х-х нормирующий преобразователь сигналов термосопротивленийБарьеры искрозащиты (барьеры искробезопасности)…КА5003Ех барьеры искрозащиты, разветвители 1 в 2 сигналов термопар, термометров сопротивления и потенциометров, 1-канальные, USB, RS-485.
..НПСИ-200-ГР1.2 модуль разветвления 1 в 2 и гальванической развязки сигнала (4…20) мА…НПСИ-ДНТВ нормирующий преобразователь действующих значений напряжения и тока…НПСИ-ДНТН нормирующий преобразователь действующих значений напряжения и тока …НПСИ-200-ДН/ДТ нормирующие преобразователи действующих значений напряжения и тока…НПСИ-МС1 преобразователь мощности, напряжения, тока, коэффициента мощности…НПСИ-500-МС3 измерительный преобразователь параметров трёхфазной сети с RS-485 и USB …НПСИ-500-МС1 измерительный преобразователь параметров однофазной сети с RS-485 и USB …НПСИ-230-УНТ нормирующий измерительный преобразователь унифицированных сигналов с сигнализацией…НПСИ-ЧВ/ЧС нормирующие преобразователи частоты, периода, длительности сигналов, частоты сети…ПНТ-х-х нормирующий преобразователь сигналов термопар…ПСТ-х-х нормирующий преобразователь сигналов термосопротивленийБарьеры искрозащиты (барьеры искробезопасности)…КА5003Ех барьеры искрозащиты, разветвители 1 в 2 сигналов термопар, термометров сопротивления и потенциометров, 1-канальные, USB, RS-485. ..КА5004Ех барьеры искрозащиты, сигналы термопар, термометров сопротивления и потенциометров, сигнализация, USB, RS-485…КА5011Ех барьеры искрозащиты (барьеры искробезопасности), приёмники аналогового сигнала (4…20) мА, 1-канальные, HART …КА5022Ех барьеры искрозащиты (барьеры искробезопасности), приёмники аналогового сигнала (4…20) мА, 2-канальные…КА5013Ех барьеры искрозащиты (барьеры искробезопасности), приемники-разветвители 1 в 2 аналогового сигнала (4…20) мА, 1-канальные, HART, шина питания …КА5031Ех барьеры искрозащиты (барьеры искробезопасности), приёмники аналогового сигнала (4…20) мА, 1-канальные, HART …КА5032Ех барьеры искрозащиты (барьеры искробезопасности), приёмники аналогового сигнала (4…20) мА, 2-канальные, HART …КА5131Ех барьеры искрозащиты (барьеры искробезопасности), передатчики аналогового сигнала (4…20) мА, 1-канальные, HART …КА5132Ех барьеры искрозащиты (барьеры искробезопасности), передатчики аналогового сигнала (4…20) мА, 2-канальные…КА5241Ех барьеры искрозащиты (барьеры искробезопасности), приёмники дискретных сигналов, 1-канальные.
..КА5004Ех барьеры искрозащиты, сигналы термопар, термометров сопротивления и потенциометров, сигнализация, USB, RS-485…КА5011Ех барьеры искрозащиты (барьеры искробезопасности), приёмники аналогового сигнала (4…20) мА, 1-канальные, HART …КА5022Ех барьеры искрозащиты (барьеры искробезопасности), приёмники аналогового сигнала (4…20) мА, 2-канальные…КА5013Ех барьеры искрозащиты (барьеры искробезопасности), приемники-разветвители 1 в 2 аналогового сигнала (4…20) мА, 1-канальные, HART, шина питания …КА5031Ех барьеры искрозащиты (барьеры искробезопасности), приёмники аналогового сигнала (4…20) мА, 1-канальные, HART …КА5032Ех барьеры искрозащиты (барьеры искробезопасности), приёмники аналогового сигнала (4…20) мА, 2-канальные, HART …КА5131Ех барьеры искрозащиты (барьеры искробезопасности), передатчики аналогового сигнала (4…20) мА, 1-канальные, HART …КА5132Ех барьеры искрозащиты (барьеры искробезопасности), передатчики аналогового сигнала (4…20) мА, 2-канальные…КА5241Ех барьеры искрозащиты (барьеры искробезопасности), приёмники дискретных сигналов, 1-канальные. ..КА5242Ех барьеры искрозащиты (барьеры искробезопасности), приёмники дискретных сигналов, 2-канальные…КА5262Ех барьеры искрозащиты (барьеры искробезопасности), приёмники дискретных сигналов, 2-канальные…КА5232Ех барьеры искрозащиты (барьеры искробезопасности), приёмники дискретных сигналов, 2-канальные…КА5234Ех барьеры искрозащиты (барьеры искробезопасности), приёмники дискретных сигналов, 4-канальныеКонтроллеры, модули ввода-вывода…MDS AIO-4 Модули комбинированные ввода-вывода аналоговых и дискретных сигналов…MDS AI-8UI Модули ввода аналоговых сигналов тока и напряжения…MDS AI-8TC Модули ввода сигналов термопар, тока и напряжения…MDS AI-8TC/I Модули ввода сигналов термопар, тока и напряжения с индивидуальной изоляцией между входами…MDS AI-3RTD Модули ввода сигналов термосопротивлений и потенциометров…MDS AO-2UI Модули вывода сигналов тока и напряжения…MDS DIO-16BD Модули ввода-вывода дискретных сигналов…MDS DIO-4/4 Модули ввода-вывода дискретных сигналов …MDS DIO-12h4/4RA Модули ввода-вывода дискретных сигналов высоковольтные.
..КА5242Ех барьеры искрозащиты (барьеры искробезопасности), приёмники дискретных сигналов, 2-канальные…КА5262Ех барьеры искрозащиты (барьеры искробезопасности), приёмники дискретных сигналов, 2-канальные…КА5232Ех барьеры искрозащиты (барьеры искробезопасности), приёмники дискретных сигналов, 2-канальные…КА5234Ех барьеры искрозащиты (барьеры искробезопасности), приёмники дискретных сигналов, 4-канальныеКонтроллеры, модули ввода-вывода…MDS AIO-4 Модули комбинированные ввода-вывода аналоговых и дискретных сигналов…MDS AI-8UI Модули ввода аналоговых сигналов тока и напряжения…MDS AI-8TC Модули ввода сигналов термопар, тока и напряжения…MDS AI-8TC/I Модули ввода сигналов термопар, тока и напряжения с индивидуальной изоляцией между входами…MDS AI-3RTD Модули ввода сигналов термосопротивлений и потенциометров…MDS AO-2UI Модули вывода сигналов тока и напряжения…MDS DIO-16BD Модули ввода-вывода дискретных сигналов…MDS DIO-4/4 Модули ввода-вывода дискретных сигналов …MDS DIO-12h4/4RA Модули ввода-вывода дискретных сигналов высоковольтные. ..MDS DIO-8H/4RA Модули ввода-вывода дискретных сигналов высоковольтные…MDS DI-8H Модули ввода дискретных сигналов высоковольтные…MDS DO-8RС Модули вывода дискретных сигналов …MDS DO-16RA4 Модули вывода дискретных сигналов …MDS IC-USB/485 преобразователь интерфейсов USB и RS-485…I-7561 конвертер USB в RS-232/422/485…I-7510 повторитель интерфейса RS-485/RS-485…I-7520 преобразователь интерфейса RS-485/RS-232Измерители-регуляторы технологические…МЕТАКОН-6305 многофункциональный ПИД-регулятор с таймером выдержки…МЕТАКОН-4525 многоканальный ПИД-регулятор…МЕТАКОН-1205 измеритель-регулятор, нормирующий преобразователь, контроллер, щитовой монтаж, RS-485…МЕТАКОН-1725 двухканальный измеритель-регулятор, нормирующий преобразователь, щитовой монтаж, RS-485…МЕТАКОН-1745 четырехканальный измеритель-регулятор, нормирующий преобразователь, щитовой монтаж, RS-485…МЕТАКОН-512/532/562 многоканальные измерители-регуляторы…Т-424 универсальный ПИД-регулятор…МЕТАКОН-515 быстродействующий универсальный ПИД-регулятор.
..MDS DIO-8H/4RA Модули ввода-вывода дискретных сигналов высоковольтные…MDS DI-8H Модули ввода дискретных сигналов высоковольтные…MDS DO-8RС Модули вывода дискретных сигналов …MDS DO-16RA4 Модули вывода дискретных сигналов …MDS IC-USB/485 преобразователь интерфейсов USB и RS-485…I-7561 конвертер USB в RS-232/422/485…I-7510 повторитель интерфейса RS-485/RS-485…I-7520 преобразователь интерфейса RS-485/RS-232Измерители-регуляторы технологические…МЕТАКОН-6305 многофункциональный ПИД-регулятор с таймером выдержки…МЕТАКОН-4525 многоканальный ПИД-регулятор…МЕТАКОН-1205 измеритель-регулятор, нормирующий преобразователь, контроллер, щитовой монтаж, RS-485…МЕТАКОН-1725 двухканальный измеритель-регулятор, нормирующий преобразователь, щитовой монтаж, RS-485…МЕТАКОН-1745 четырехканальный измеритель-регулятор, нормирующий преобразователь, щитовой монтаж, RS-485…МЕТАКОН-512/532/562 многоканальные измерители-регуляторы…Т-424 универсальный ПИД-регулятор…МЕТАКОН-515 быстродействующий универсальный ПИД-регулятор. ..МЕТАКОН-513/523/533 ПИД-регуляторы…МЕТАКОН-514 ПДД-регулятор…МЕТАКОН-613 программные ПИД-регуляторы…СТ-562-М источник тока для ПМТ-2, ПМТ-4Регистраторы видеографические…ИНТЕГРАФ-1100 видеографический безбумажный 4/8/12/16 канальный регистратор данных Блоки питания и коммутационные устройства…PSM-72-24 блок питания 24 В (3 А, 72 Вт)…PSM-36-24 блок питания 24 В (1,5 А, 36 Вт)…PSL низковольтные DC/DC–преобразователи на DIN-рейку 3 и 10 Вт…PSM/4R-36-24 блок питания и реле, 24 В (1,5 А, 36 Вт)…ФС-220 фильтр сетевой…БПР блок питания и реле…БКР блок коммутации реверсивный (пускатель бесконтактный реверсивный)…БР4 блок реле…PS3400.1 блок питания 24 В (40 А) …PS3200.1 блок питания 24 В (20 А)…PS3100.1 блок питания 24 В (10 А)…PS3050.1 блок питания 24 В (5 А)…PS1200.1 блок питания 24 В (20 А)…PS1100.1 блок питания 24 В (10 А)…PS1050.1 блок питания 24 В (5 А)Программное обеспечение…SetMaker конфигуратор…… История версий…MDS Utility конфигуратор…
..МЕТАКОН-513/523/533 ПИД-регуляторы…МЕТАКОН-514 ПДД-регулятор…МЕТАКОН-613 программные ПИД-регуляторы…СТ-562-М источник тока для ПМТ-2, ПМТ-4Регистраторы видеографические…ИНТЕГРАФ-1100 видеографический безбумажный 4/8/12/16 канальный регистратор данных Блоки питания и коммутационные устройства…PSM-72-24 блок питания 24 В (3 А, 72 Вт)…PSM-36-24 блок питания 24 В (1,5 А, 36 Вт)…PSL низковольтные DC/DC–преобразователи на DIN-рейку 3 и 10 Вт…PSM/4R-36-24 блок питания и реле, 24 В (1,5 А, 36 Вт)…ФС-220 фильтр сетевой…БПР блок питания и реле…БКР блок коммутации реверсивный (пускатель бесконтактный реверсивный)…БР4 блок реле…PS3400.1 блок питания 24 В (40 А) …PS3200.1 блок питания 24 В (20 А)…PS3100.1 блок питания 24 В (10 А)…PS3050.1 блок питания 24 В (5 А)…PS1200.1 блок питания 24 В (20 А)…PS1100.1 блок питания 24 В (10 А)…PS1050.1 блок питания 24 В (5 А)Программное обеспечение…SetMaker конфигуратор…… История версий…MDS Utility конфигуратор… RNet программное обеспечение…OPC-сервер для регулятров МЕТАКОН…OPC-сервер для MDS-модулей
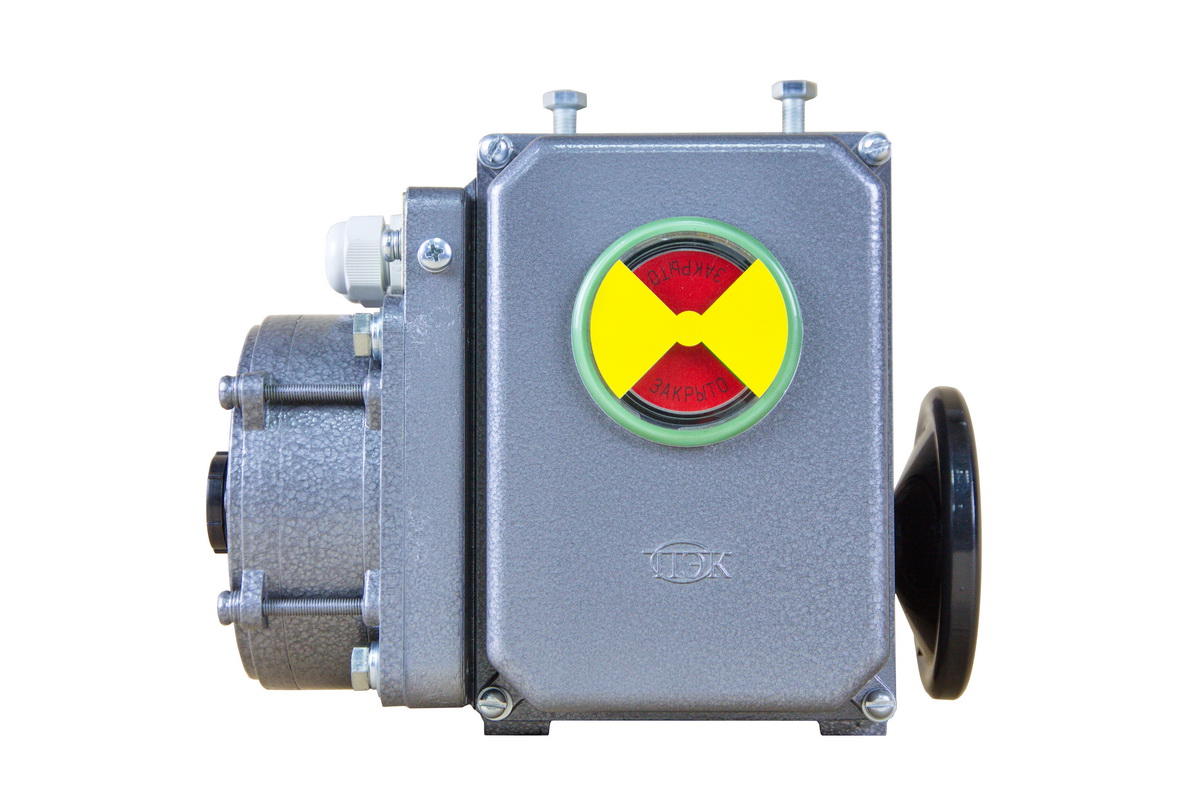
RNet программное обеспечение…OPC-сервер для регулятров МЕТАКОН…OPC-сервер для MDS-модулей3. Электрические исполнительные механизмы
Электрические исполнительные механизмы в зависимости от типа принципа действия делят на электромагнитные и электродвигательные.
Электромагнитные исполнительные механизмы являются наиболее простыми, надежными и быстродействующими из электрических исполнительных механизмов. Их используют для управления различного рода регулирующими и затворными клапанами, вентилями, золотниками и т. п. По виду движения исполнительного (регулирующего) органа (шток, выходной вал) электромагнитные механизмы подразделяют на электромагниты с прямолинейным движением и электромагнитные муфты с вращательным движением.
Рис. 38. Электромагнит
В
зависимости от требований электромагниты
могут отличаться друг от друга
конструктивно.
По характеру движения сердечника и связанного с ним регулирующего органа электромагнитные механизмы подразделяют на тянущие, толкающие, поворотные, удерживающие и реверсивные.
В тянущих механизмах линейное перемещение сердечника направлено от точки приложения противодействующих сил, а в толкающих – наоборот. В поворотных электромагнитных механизмах при подаче напряжения на обмотку катушки силовой элемент поворачивается на определенный угол. Применение поворотных механизмов ограничивается вследствие малых крутящих моментов и громоздкости конструкции.
Реверсивные
электромагнитные механизмы обеспечивают
изменение перемещения
силового элемента в зависимости от
характера электрического сигнала. Реверсивный механизм обычно содержит
два электромагнита, сердечники которых
механически связаны с запирающим
элементом.
Реверсивный механизм обычно содержит
два электромагнита, сердечники которых
механически связаны с запирающим
элементом.
По количеству позиций выходного силового элемента (регулирующего органа) различают одно-, двух- и трехпозиционные электромагнитные механизмы. У однопозиционных механизмов при подаче тока на обмотку катушки сердечник занимает одно определенное положение. У двухпозиционных механизмов силовой элемент занимает одно из двух положений в зависимости от того, на обмотку какого электромагнита подается электрический ток. После обесточивания он сохраняет занятое им положение. Выходной силовой элемент трехпозиционных электромагнитных механизмов при отсутствии тока в обмотках занимает нейтральное положение.
В зависимости от вида питающего напряжения электромагнитные механизмы могут быть переменного и постоянного тока, а также со сменными катушками переменного и постоянного токов с унифицированным магнитопроводом.
В
настоящее время получили широкое
распространение электромагнитные
приборы серии ЭВ. Приводы ЭВ‑1
и ЭВ‑2 рассчитаны на
длительный режим работы, а привод ЭВ‑3
рассчитан на кратковременный режим
работы (в течение 1 мин) при усилии 100 Н.
Приводы ЭВ‑1
и ЭВ‑2 рассчитаны на
длительный режим работы, а привод ЭВ‑3
рассчитан на кратковременный режим
работы (в течение 1 мин) при усилии 100 Н.
В термических и литейных цехах исполнительные механизмы с электромагнитным приводом используют в регуляторах температуры в топливных печах, давления и расхода сжатого воздуха в формовочных машинах.
По принципу действия электромагнитные муфты разделяют на фрикционные и порошковые муфты и муфты скольжения.
Фрикционная
муфта (рис. 39) состоит из двух полумуфт:
ведущей 1
и ведомой 6,
посаженных на валы 3 и Р. В корпусе ведущей
полумуфты имеется обмотка 5, питаемая
электрическим током через кольца 4
и щетки 2. При подаче постоянного электрического
тока на обмотку возникает магнитный
поток, который притягивает по шлицам 8
к себе ведомую полумуфту. Последняя,
преодолевая усилие пружины 7,
притягивается к ведомой полумуфте. Силы
трения между полумуфтами позволяют
передать крутящий момент с ведущего
вала на ведомый. При выключении тока
магнитное поле исчезает, и пружины 7
разъединяют полумуфты друг от друга,
прерывая тем самым вращение вала
9.
Однодисковые
муфты не позволяют передавать большие
крутящие моменты. Для этого используют
многодисковые муфты, имеющие большое
число поверхностей трения.
При подаче постоянного электрического
тока на обмотку возникает магнитный
поток, который притягивает по шлицам 8
к себе ведомую полумуфту. Последняя,
преодолевая усилие пружины 7,
притягивается к ведомой полумуфте. Силы
трения между полумуфтами позволяют
передать крутящий момент с ведущего
вала на ведомый. При выключении тока
магнитное поле исчезает, и пружины 7
разъединяют полумуфты друг от друга,
прерывая тем самым вращение вала
9.
Однодисковые
муфты не позволяют передавать большие
крутящие моменты. Для этого используют
многодисковые муфты, имеющие большое
число поверхностей трения.
|
|
|
|
Рис 39. Электромагнитная фрикционная муфта |
Рис. 40. Электромагнитная порошковая муфта |
Порошковые
муфты (ферропорошковые или
магнитоэмульсионные) работают по
принципу намагничивания ферромагнитной
среды, заполняющей пространство между
полумуфтами 1
и 2 (рис.
Электромагнитные
муфты скольжения состоят из двух основных
частей полумуфт (рис. 41). На ведущем
валу 1
устанавливают полумуфту с индуктором
3
в виде электромагнита постоянного тока
с катушкой возбуждения 6
и полюсами 7. На ведомом валу закреплена
полумуфта с якорем 4
в виде роторной клетки асинхронного
двигателя. Ток к катушке 6
подается через щетки и контактные кольца
2.
При вращении ведущего вала магнитное
поле индуктора 3
вращается относительно якоря 4,
наведя в нем токи, которые, взаимодействуя
с магнитным полем индуктора, создают
крутящий момент. Якорь и вал 5 начинают
вращаться. При отключении тока вращение
якоря прекращается. Имеются конструкции
не только с наружным, но и с внутренним
расположением якоря. Достоинством
рассмотренной конструкции является ее
высокая надежность, а также возможность
плавно регулировать передаваемый момент
за счет изменения напряжения питания.
На ведомом валу закреплена
полумуфта с якорем 4
в виде роторной клетки асинхронного
двигателя. Ток к катушке 6
подается через щетки и контактные кольца
2.
При вращении ведущего вала магнитное
поле индуктора 3
вращается относительно якоря 4,
наведя в нем токи, которые, взаимодействуя
с магнитным полем индуктора, создают
крутящий момент. Якорь и вал 5 начинают
вращаться. При отключении тока вращение
якоря прекращается. Имеются конструкции
не только с наружным, но и с внутренним
расположением якоря. Достоинством
рассмотренной конструкции является ее
высокая надежность, а также возможность
плавно регулировать передаваемый момент
за счет изменения напряжения питания.
Рис. 41. Электромагнитная муфта скольжения
Промышленность
выпускает муфты для механизмов малых
мощностей типа ПМС с номинальным моментом
1,7 … 30 Нм.
Для механизмов большей мощности выпускают
муфты серии ИМС с номинальными моментами
70 . .. 1600 Нм.
.. 1600 Нм.
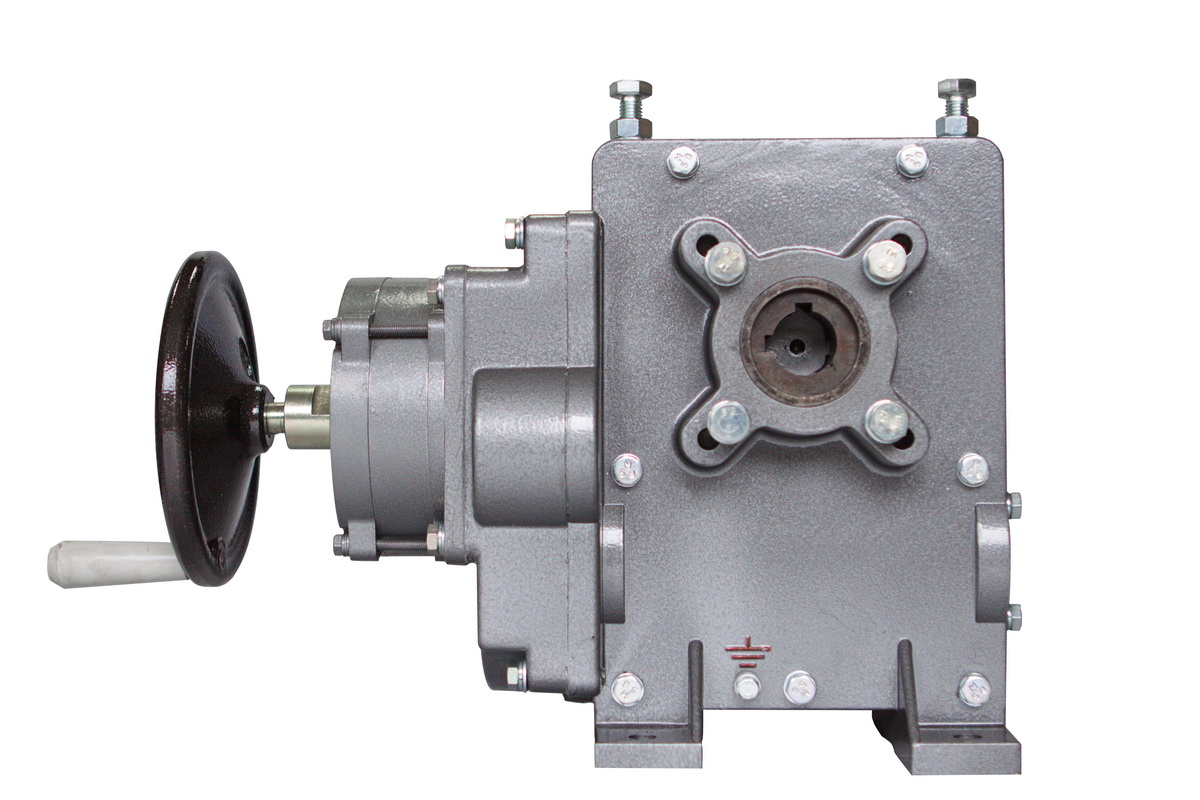
Электродвигательный механизм состоит из исполнительного двигателя редуктора и тормоза. Сигнал управления одновременно подается на двигатель и тормоз, при этом тормоз растормаживается и двигатель приводит в движение регулирующий орган. При снятии сигнала двигатель выключается, а тормоз останавливает движение регулирующего органа.
Исполнительными двигателями называют управляемые двигатели малой мощности, которые предназначены для преобразования электрического сигнала в механическое вращение вала.
Как
правило, исполнительные двигатели имеют
две обмотки: возбуждения и управления.
Исключение составляют двигатели с
постоянными магнитами. Обмотки возбуждения
постоянно находятся под напряжением,
а на обмотку управления сигнал подается
лишь тогда, когда необходимо получить
вращение вала. Так как исполнительные
двигатели работают в схемах управления,
то для них в основном характерны пуски,
остановки или реверсии. Время их вращения
обычно невелико, поэтому эти двигатели
никогда не снабжаются вентиляторами. В цепях сопряжения переходных процессов
исполнительные двигатели стремятся
выполнить малоинерционными и
малогабаритными. В настоящее время в
качестве исполнительных двигателей
используют двухфазные асинхронные,
синхронные шаговые двигатели и двигатели
постоянного тока.
В цепях сопряжения переходных процессов
исполнительные двигатели стремятся
выполнить малоинерционными и
малогабаритными. В настоящее время в
качестве исполнительных двигателей
используют двухфазные асинхронные,
синхронные шаговые двигатели и двигатели
постоянного тока.
Типы электродвигателей, их устройство и схемы выключения изучаются в курсе «Общая электротехника» и поэтому здесь не рассматриваются.
4. ГИДРАВЛИЧЕСКИЕ И ПНЕВМАТИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ
Гидравлические и пневматические исполнительные двигатели преобразуют энергию рабочей среды, находящейся под давлением, в механическую энергию поступательного или вращательного движения.
В качестве рабочей среды в гидродвигателях чаще всего используется минеральное масло, сохраняющее свои свойства при воздействии на него высокого давления. В пневмодвигателях рабочей средой служит сжатый воздух.
|
|
|
|
Рис. |
Рис. 43. Поршневой исполнительный механизм механизм |
 42.
Мембранный исполнительный
42.
Мембранный исполнительныйВ устройствах автоматического управления гидро- и пневмодвигатели используют значительно реже, чем электрические. Однако в ряде случаев они оказываются единственно приемлемыми в техническом отношении.
Гидро- и пневмодвигатели способны развивать очень большие усилия (0,03 … 0,3 МН) при малых габаритных размерах. По этим параметрам они превосходят все остальные двигатели. Они просты по конструкции, надежно работают и не нуждаются в редукторах для согласования с регулирующим органом. Гидравлические и пневматические двигатели имеют одинаковый принцип действия, их различие лишь в быстродействии.
Различают
две основные разновидности гидро- и
пневмодвигателей: с поступательным
движением (мембранные и поршневые) и с
вращательным движением (шестеренчатые,
лопастные, плунжерные и турбинные).
В мембранном исполнительном механизме (рис. 42) перемещение выходного штока 4 осуществляется силой, создаваемой давлением рабочей среды на мембрану 2. При этом возвратная пружина 3 сжимается. Чем больше диаметр мембраны, тем большее усилие может быть передано на регулирующий орган. Полость под мембраной соединена с атмосферой. При снятии давления мембрана и, следовательно, шток возвращаются возвратной пружиной в исходное положение. Диски 1 обеспечивают жесткость мембраны, изготовленной из прорезиненной ткани.
Значительно реже применяют поршневые исполнительные механизмы. Их используют в тех случаях, когда шток необходимо перемещать на расстояние более 300 мм.
В
цилиндре 1
исполнительного механизма (рис. 43)
перемещается поршень 2
со штоком 3.
Поршень будет неподвижен при равенстве
давлений Р1
и Р2.
Если давление в левой полости больше,
то на поршень будет действовать сила,
равная разности давлений Р1
и Р2, умноженной на площадь
поверхности поршня. Под действием этой
силы поршень начнет перемещаться вправо.
Шток 3
проходит через уплотнительный сальник
4.
Под действием этой
силы поршень начнет перемещаться вправо.
Шток 3
проходит через уплотнительный сальник
4.
По способу управления гидро- и пневмоцилиндры могут быть дроссельными и с объемным управлением. При дроссельном управлении в качестве управляющего устройства используют золотники, устройства типа сопло-заслонка или струйные трубки. При объемном управлении в качестве источников энергии используют насосы или компрессоры переменной производительности.
Рис 44. Регулирующая заслонка
Гидро- и пневмодвигатели применяют в устройствах привода автоматических манипуляторов и исполнительных механизмов, дозаторов, затворов и питателей, предназначенных для регулирования расходов формовочных и других сыпучих и пусковых материалов.
5. РЕГУЛИРУЮЩИЕ ОРГАНЫ
Для
непрерывного регулирования в
запорно-регулирующих устройствах
применяют дросселирующие регулирующие
органы следующих типов: заслонки,
клапаны, краны, шиберы и направляющие
аппараты.
В заслонках (рис. 44) изменение пропускной способности достигается поворотом заслонки (диска) в седле. Они просты по конструкции и имеют удовлетворительные регулировочные свойства. Заслонки можно устанавливать на вертикальных и горизонтальных участках трубопроводов. Они получили широкое распространение в литейных и термических цехах для регулирования потоков газа и воздуха в трубопроводе с избыточным давлением до 0,25 МПа.
Клапаны применяют для регулирования расходов газа, воздуха или пара при давлении до 20 МПа. В зависимости от числа положений их подразделяют на двух- и трехходовые.
В
зависимости от положения запирающего
элемента при обесточенной катушке
двухходовые клапаны делят на нормально
закрытые (рис. 45, а)
и нормально открытые (рис. 45, б).
В нормально закрытом клапане при
отсутствии тока проходной канал закрыт,
а в нормально открытом – открыт. Тяговое
усилие большинства электромагнитов
резко уменьшается с увеличением хода
сердечника, что вызывает увеличение
габаритных размеров и потребляемой
мощности. Поэтому в клапанах с
электромагнитными механизмами применяют
уравновешивающие запирающие элементы
(рис. 45, в)
и встроенные усилители (рис. 45, г).
Поэтому в клапанах с
электромагнитными механизмами применяют
уравновешивающие запирающие элементы
(рис. 45, в)
и встроенные усилители (рис. 45, г).
В соответствии с типом дроссельного органа клапаны делят на золотниковые, диафрагмовые и шланговые. Золотниковые клапаны бывают односедельные (рис. 45, а и б), двухседельные (рис. 45, в) и многоседельные. Запорные элементы всех клапанов выполняют либо в форме тарелки (рис. 45, а–в), либо с конической (рис. 45, г) или шаровой поверхностью.
Рис. 45. Схемы золотниковых клапанов с электромагнитным механизмом: а – нормально закрытый; б – нормально открытый; в – с уравновешивающим запирающим элементом; г – со встроенным усилителем; д и е – распределительных; 1 – обмотка; 2 – возвратная пружина; 3 – сердечник; 4 – шток; 5 – запирающий элемент; 6 – седло; 7 – корпус
Трехходовые
(распределительные) клапаны имеют три
присоединительных прохода, через которые
два потока соединяются в один (рис. 45,
д) или один поток
разделяется на два (рис. 45, е).
45,
д) или один поток
разделяется на два (рис. 45, е).
Краны являются простейшими регулирующими органами, которые применяют для регулирования расхода потока в трубопроводах небольшого сечения. Наиболее распространенной является конструкция крана с пробкой в виде усеченного конуса, притертого к корпусу. В пробке имеется отверстие круглой, овальной или прямоугольной формы, сквозь которое протекает регулируемая среда. Поворотом пробки регулируется расход жидкости, протекающей по трубопроводу.
Шиберы устанавливают в дымоходах топливных плавильных и термических печей. Они предназначены для регулирования давления в рабочем пространстве печи.
При
изменении входной скорости газа или
воздуха дымососов и вентиляторов
изменяются их производительность и
напор. На этом свойстве основано
устройство регулирующего органа на
базе направляющего аппарата. Регулирующий
орган, выполненный в виде направляющего
аппарата, практически безинерционен и
более экономичен, чем регулирующий
орган, использующий дросселирование
потока.
Дозирующие исполнительные органы подразделяют на две группы: механические и электрические. К первой группе относятся плужковые сбрасыватели, дозаторы, питатели, насосы, компрессоры. Во вторую группу входят реостатные и автотрансформаторные регулирующие органы.
Плужковые сбрасыватели широко применяют в литейных цехах для регулирования уровня различных формовочных материалов в бункерах бегунов, формовочных и стержневых машин. Плужки выполняют в виде лемеха плуга или другого скребкового устройства и устанавливают над ленточным транспортером с движущимся сыпучим материалом. Плужок может занимать два положения: на ленте или над ней.
Дозаторы представляют механизмы, предназначенные для выдачи потока материала с обеспечением требуемого значения расхода.
Практически
для всех сыпучих материалов, кроме
порошкообразных, могут применяться
одни и те же дозаторы. Для порошковых
материалов используют дозаторы,
исключающие самопроизвольное движение
материала.
Дозаторы непрерывного действия различают по способу регулирования производительности, типу систем автоматического регулирования, характеристики дозируемого материала и конструктивным признакам.
Рис. 46. Схемы рабочих органов дозаторов:
а – ленточный питатель; б – вибропитатель; в – тарельчатый питатель; г – шнековый питатель; д – секторный питатель; е – гравитационный питатель
В зависимости от способа регулирования производительности все дозаторы делят на механизмы с автоматическим регулированием и без автоматического регулирования.
В связи с большим разнообразием физико-химических свойств дозируемых материалов и условий, в которых работают дозаторы, разработаны различные конструкции рабочих (регулирующих) органов дозаторов, основные типы которых показаны на рис. 46, а–е.
Контрольные вопросы и задания
1. Расскажите
о классификации задающих устройств.
Расскажите
о классификации задающих устройств.
2. Расскажите о классификации исполнительных механизмов.
3. Расскажите о классификации регулирующих органов.
4. Как устроены и работают механические задающие устройства?
5. Каково назначение задающих устройств, выполненных в виде функциональных потенциометров?
6. Как устроены и работают дискретные задающие устройства?
7. Какие электромагнитные исполнительные механизмы применяют в системах автоматики?
8. Какие электрические муфты применяют в системах автоматики?
9. Назовите электродвигательные исполнительные механизмы.
10. Как устроены и работают гидравлические и пневматические исполнительные механизмы?
11. Как устроены и работают дросселирующие регулирующие органы?
12. Как устроены и работают дозирующие исполнительные органы?
Электрические приводы | SMC Corporation of America
Электрические линейные приводы могут толкать, тянуть или передавать рабочие нагрузки совершенно иначе, чем пневматические приводы. Пневматические приводы полагаются на относительно грубые устройства, такие как резиновые подушки или амортизаторы, регуляторы давления и фитинги для ограничения потока в порту для управления их движением. Напротив, электрический привод использует двигатель с электронным управлением и шарико-винтовую передачу для обеспечения точного профиля движения посредством ускорения, скорости и замедления. Кроме того, контроллер способен интегрировать несколько «остановочных» положений вдоль хода привода с высокой точностью и воспроизводимостью.
Пневматические приводы полагаются на относительно грубые устройства, такие как резиновые подушки или амортизаторы, регуляторы давления и фитинги для ограничения потока в порту для управления их движением. Напротив, электрический привод использует двигатель с электронным управлением и шарико-винтовую передачу для обеспечения точного профиля движения посредством ускорения, скорости и замедления. Кроме того, контроллер способен интегрировать несколько «остановочных» положений вдоль хода привода с высокой точностью и воспроизводимостью.
Помимо управления движением, электрические приводы экономят затраты на электроэнергию, программируя все движения без необходимости в инфраструктуре сжатого воздуха. Утечки устраняются. Фильтрация не нужна.
Флагманская линейка электроприводов SMC, серия LE, разработана с акцентом на простоту установки и эксплуатации; параметры функции предустановлены, расширены опцией настройки «Простой режим», чтобы обеспечить быструю работу. Серия LE доступна в широком диапазоне типов, включая: ползунки, стержневые и направляющие стержни, скользящие столы, поворотные, захватные и миниатюрные. Аксессуары включают в себя контроллеры приводов и шлюзы.
Аксессуары включают в себя контроллеры приводов и шлюзы.
Инструкции по эксплуатации
Видео по электрическим приводам
Видео по JXC91
Приводы с безбатарейными абсолютными энкодерами
Компания SMC представила линейку приводов, приводимых в действие шаговыми двигателями 24 В постоянного тока, оснащенными безбатарейными абсолютными энкодерами. Абсолютный энкодер предлагает данные о положении при включении питания, избегая процедуры возврата в исходное положение, которая требуется инкрементному энкодеру. Наш безбатарейный абсолютный энкодер сочетает датчики ориентации с вращающимися колесами разного размера, что позволяет определять положение. Эта электромеханическая конструкция исключает использование батареи и связанные с ней ограничения на импорт и утилизацию, характерные для традиционных абсолютных энкодеров. Безбатарейное решение также не имеет ограничений по сохранению памяти при длительном отключении питания.
Слайдеры
Электропривод бесштокового типа имеет платформу для крепления нагрузки, расположенную над шарико-винтовой передачей или ременной передачей. Преимуществом шарико-винтовой передачи является лучшая повторяемость позиционирования по сравнению с ременными приводами. Ременной привод обеспечивает более экономичное предложение.
Преимуществом шарико-винтовой передачи является лучшая повторяемость позиционирования по сравнению с ременными приводами. Ременной привод обеспечивает более экономичное предложение.
Серводвигатели переменного тока
Аналогичен типу Slider, но использует серводвигатель переменного тока вместо двигателя постоянного тока. Серводвигатель переменного тока обеспечивает более высокую скорость и ускорение, а также улучшенную вертикальную нагрузку. Дополнительные драйверы включают импульсный вход и различные протоколы связи, включая Ethernet. Энкодеры имеют разрешение от 17 до 22 бит, в зависимости от выбора двигателя.
*** В настоящее время у нас большие сроки поставки двигателей типа «T». Пожалуйста, проконсультируйтесь с вашим представителем SMC по поводу альтернатив.***
Шток и направляющий шток
Электропривод штокового типа имеет известную форму штокового цилиндра, подходящую для толкания, вытягивания, подъема и прессования. Тип направляющего стержня включает в себя стержни для противодействия вращательным силам вместо привода и двигателя, а также для сопротивления ударным и длительным боковым нагрузкам.
Тяга сервопривода переменного тока
Аналогичен типу со стержнем и направляющим стержнем, за исключением того, что в нем используется серводвигатель переменного тока вместо двигателя постоянного тока. Серводвигатель переменного тока обеспечивает более высокую скорость и ускорение, а также улучшенную вертикальную нагрузку. Драйверы относятся к импульсному типу ввода, с опциями инкрементного и абсолютного энкодера и 17- или 18-битным разрешением.
*** В настоящее время у нас большие сроки поставки двигателей типа «T». Пожалуйста, проконсультируйтесь с вашим представителем SMC по поводу альтернатив.***
Скользящие столы
LES и LESH включают в себя рабочий стол, линейную направляющую и линейный шариковый винт с приводом от двигателя. Рабочий стол предлагает верхнюю и переднюю опорные поверхности для груза. Под ним находится линейная направляющая, обеспечивающая точность позиционирования и поддерживающая моментную нагрузку.
Стол скольжения с сервоприводом переменного тока
LESYH представляет собой высокоточный вариант стола скольжения высокой жесткости LESH. Этот привод улучшает повторяемость позиционирования до ±0,01 и значительно увеличивает вертикальную рабочую нагрузку по сравнению с LESH. Внешний двигатель может быть установлен на одной линии со столом или параллельно слева или справа.
Этот привод улучшает повторяемость позиционирования до ±0,01 и значительно увеличивает вертикальную рабочую нагрузку по сравнению с LESH. Внешний двигатель может быть установлен на одной линии со столом или параллельно слева или справа.
Поворотный
Поворотные электрические приводы имеют вращающийся рабочий стол, расположенный над корпусом двигателя и трансмиссии. Доступны три различных размера двигателя/стола, каждый из которых предлагает базовый вариант и вариант с высоким крутящим моментом. Кроме того, каждый размер предлагает четыре варианта угла поворота, включая 90°, 180°, 310/320° и непрерывное вращение.
Электрические захваты
Серия электрических захватов SMC включает три серии (LEHZ, LEHZJ и LEHF) с двумя пальцами. LEHS доступен с тремя пальцами. Пылезащитные чехлы, низкопрофильные пальцы и варианты с длинным ходом — вот некоторые из опций серии. Трехпальцевый тип идеально подходит для удержания круглых заготовок. Преимущества электрических захватов включают регулируемое усилие захвата, функцию предотвращения падения и возможность распознавания различных размеров и вывода результатов измерения длины.
Миниатюрный
Семейство мини-электрических приводов LEP включает стержневой привод и привод с подвижным столом. Каждая конструкция мини-электропривода построена на одних и тех же двигателях, приводах и корпусах. Каждая модель легкая, менее 1-1/2 фунта, и достаточно компактна, чтобы поместиться на ладони. Миниатюрный электропривод LAT3 Card Motor размером с кредитную карту и высотой всего 9 мм. Повторяемость позиционирования составляет ±5 мкм при рабочей частоте до 500 циклов в минуту.
Контроллеры и драйверы
Контроллеры и драйверы, необходимые для нашего семейства электрических приводов. Вы найдете контроллеры шаговых двигателей, серводвигателей и карт двигателей, а также шлюзы Fieldbus 24 В постоянного тока и сервоприводы переменного тока.
Изделия для чистых помещений
Электропривод ползункового типа серии LEF имеет малую высоту профиля 46 мм (LEF16). Основной корпус привода может быть установлен без снятия каких-либо внешних компонентов, таких как крышка, что упрощает установку. Стандартная уплотнительная лента закрывает направляющую, шарико-винтовую передачу и ремень, предотвращая разбрызгивание смазки и внешних инородных тел и попадание их в LEF. Доступны два типа приводов: шариковый винт или зубчатый ремень. Доступные двигатели включают серводвигатель с шарико-винтовой передачей или шаговый двигатель с ременным приводом. При заказе LEF вместе с контроллером в контроллере предварительно задаются начальные данные привода, что позволяет быстро запустить его в «простом режиме».
Стандартная уплотнительная лента закрывает направляющую, шарико-винтовую передачу и ремень, предотвращая разбрызгивание смазки и внешних инородных тел и попадание их в LEF. Доступны два типа приводов: шариковый винт или зубчатый ремень. Доступные двигатели включают серводвигатель с шарико-винтовой передачей или шаговый двигатель с ременным приводом. При заказе LEF вместе с контроллером в контроллере предварительно задаются начальные данные привода, что позволяет быстро запустить его в «простом режиме».
Серводвигатели переменного тока | SMC Corporation of America
Аналогичен типу Slider, за исключением того, что в нем используется серводвигатель переменного тока вместо двигателя постоянного тока. Серводвигатель переменного тока обеспечивает более высокую скорость и ускорение, а также улучшенную вертикальную нагрузку. Дополнительные драйверы включают импульсный вход и различные протоколы связи, включая Ethernet. Энкодеры имеют разрешение от 17 до 22 бит, в зависимости от выбора двигателя.
*** В настоящее время у нас большие сроки поставки двигателей типа «T». Пожалуйста, проконсультируйтесь с вашим представителем SMC по поводу альтернатив.***
Шарико-винтовая передача
Версия ползуна LEFS с сервоприводом переменного тока оснащена серводвигателем переменного тока вместо версии постоянного тока. Серводвигатель переменного тока обеспечивает более высокую скорость и ускорение, а также улучшенную устойчивость к вертикальной нагрузке в модели размера 40. Дополнительные драйверы включают импульсный вход и различные протоколы связи, включая Ethernet. Энкодеры имеют разрешение от 17 до 22 бит, в зависимости от выбора двигателя.
Шарико-винтовая передача высокой жесткости
Эта версия каретки LEKFS оснащена серводвигателем переменного тока вместо версии постоянного тока. Серводвигатель переменного тока обеспечивает более высокую скорость и ускорение, а также улучшенную вертикальную нагрузку. Дополнительные драйверы включают импульсный вход и различные протоколы связи, включая Ethernet. Энкодеры имеют разрешение от 17 до 22 бит, в зависимости от выбора двигателя.
Энкодеры имеют разрешение от 17 до 22 бит, в зависимости от выбора двигателя.
Шарико-винтовая передача высокой жесткости, широкий корпус
LEJS представляет собой электрический привод ползункового типа, доступный исключительно с серводвигателем переменного тока. Привод имеет значительно более широкую платформу для крепления нагрузки, чем LEFS, поддерживаемую внутри двухосевой линейной направляющей для уменьшения отклонения момента. Серводвигатель переменного тока обеспечивает более высокую скорость и ускорение, а также модель размера 63 с высокой нагрузкой, эксклюзивная для LEJ. Дополнительные драйверы включают импульсный вход и различные протоколы связи, включая Ethernet. Энкодеры имеют разрешение от 17 до 22 бит, в зависимости от выбора двигателя.
Ременный привод
Версия ползуна LEFB с сервоприводом переменного тока оснащена серводвигателем переменного тока вместо версии постоянного тока. Серводвигатель переменного тока обеспечивает более высокую скорость и ускорение, а модель размера 40 недоступна в версии постоянного тока.
