Как работает электродвигатель постоянного тока. Из каких основных частей состоит двигатель. Какие бывают типы двигателей постоянного тока. Каковы преимущества и недостатки этих двигателей. Где применяются двигатели постоянного тока.
Принцип работы электродвигателя постоянного тока
Электродвигатель постоянного тока преобразует электрическую энергию в механическую за счет взаимодействия магнитных полей статора и ротора. Основные компоненты двигателя:
- Статор — неподвижная часть с обмоткой возбуждения
- Ротор (якорь) — вращающаяся часть с обмоткой якоря
- Коллектор — устройство для подачи тока в обмотку якоря
- Щетки — обеспечивают контакт с коллектором
При подаче постоянного тока в обмотку возбуждения создается магнитное поле статора. Ток в обмотке якоря, взаимодействуя с этим полем, создает вращающий момент, заставляющий ротор вращаться.
Устройство двигателя постоянного тока
Основные конструктивные элементы электродвигателя постоянного тока:

- Станина — корпус двигателя
- Главные полюсы со стальными сердечниками и обмотками возбуждения
- Якорь с обмоткой и коллектором
- Щеточный аппарат
- Подшипниковые щиты
- Вентилятор для охлаждения
Статор создает основное магнитное поле двигателя. Ротор с обмоткой якоря вращается в этом поле, преобразуя электрическую энергию в механическую.
Типы двигателей постоянного тока
По способу возбуждения магнитного поля различают следующие типы двигателей постоянного тока:
- С независимым возбуждением
- С параллельным возбуждением
- С последовательным возбуждением
- Со смешанным возбуждением
- С возбуждением от постоянных магнитов
Каждый тип имеет свои особенности характеристик и области применения. Например, двигатели с последовательным возбуждением развивают большой пусковой момент.
Преимущества и недостатки двигателей постоянного тока
Основные достоинства электродвигателей постоянного тока:- Легкость регулирования частоты вращения в широком диапазоне
- Большой пусковой момент
- Высокое быстродействие
- Линейность механических характеристик
К недостаткам можно отнести:
- Сложность конструкции коллекторного узла
- Необходимость обслуживания щеточно-коллекторного узла
- Искрение щеток
- Относительно высокая стоимость
Применение двигателей постоянного тока
Благодаря своим преимуществам, двигатели постоянного тока широко используются в различных отраслях:
- Электротранспорт (электровозы, трамваи, троллейбусы)
- Станкостроение
- Робототехника
- Электроприводы подъемных механизмов
- Электроинструменты
- Бытовая техника
Особенно эффективно применение таких двигателей там, где требуется плавное регулирование скорости и высокий момент.
Характеристики двигателей постоянного тока
Основные характеристики электродвигателей постоянного тока:
- Номинальная мощность
- Номинальное напряжение питания
- Номинальная частота вращения
- Номинальный вращающий момент
- КПД
- Диапазон регулирования частоты вращения
Эти параметры определяют возможности применения двигателя в конкретных условиях. Например, для тяговых двигателей электротранспорта важны высокий пусковой момент и широкий диапазон регулирования скорости.

Регулирование скорости двигателей постоянного тока
Изменять частоту вращения двигателя постоянного тока можно несколькими способами:
- Изменением напряжения питания якоря
- Изменением тока возбуждения
- Введением добавочного сопротивления в цепь якоря
- Импульсным регулированием напряжения
Выбор метода регулирования зависит от требуемого диапазона регулирования, характера нагрузки и других факторов. Современные системы управления позволяют плавно и точно регулировать скорость в широком диапазоне.
Обслуживание двигателей постоянного тока
Для обеспечения надежной работы электродвигатели постоянного тока требуют периодического обслуживания:
- Замена или притирка щеток
- Проточка коллектора
- Продувка от пыли
- Проверка изоляции обмоток
- Смазка подшипников
Правильное и своевременное обслуживание позволяет значительно продлить срок службы двигателя и повысить его надежность. Особое внимание следует уделять состоянию коллекторно-щеточного узла.
В данной статье мы подробно рассмотрим двигатели постоянного тока. Детально разберем типы и принцип работы данных двигателей. Расскажем как происходит переключение и контролирование двигателя, контролирования скорости и регулировка скорости импульса, а так же опишем как изменить направление вращения двигателя постоянного тока разными методами.
Описание и принцип работы
Электрические двигатели постоянного тока — это непрерывные приводы, которые преобразуют электрическую энергию в механическую. Двигатель постоянного тока достигает этого, создавая непрерывное угловое вращение, которое можно использовать для вращения насосов, вентиляторов, компрессоров, колес и т.д. Купить двигатель постоянного тока вы можете на Алиэкспресс:

Наряду с обычными роторными двигателями постоянного тока имеются также линейные двигатели, способные производить непрерывное движение вкладыша. Существуют в основном три типа обычных электрических двигателей: двигатели переменного тока, двигатели постоянного тока и шаговые двигатели.
Двигатели переменного тока, как правило, используются в однофазных или многофазных промышленных мощных установках, в которых постоянный крутящий момент и скорость требуются для управления большими нагрузками, такими как вентиляторы или насосы.

В этом уроке по электродвигателям мы рассмотрим только простые двигатели постоянного тока и шаговые двигатели, которые используются во многих различных типах электронных схем, систем позиционного управления, микропроцессоров, PIC и роботизированных схем.
Типы двигателей постоянного тока
Двигатель постоянного тока, является наиболее часто используемым приводом для создания непрерывного движения, скорость вращения которого легко регулируется, что делает их идеальными для использования в устройствах, таких как регулирование скорости, управление сервоприводом и / или требуется позиционирование. Двигатель постоянного тока состоит из двух частей: «Статор», который является неподвижной частью, и «Ротор», который является вращающейся частью. В результате доступно три типа двигателей постоянного тока.
- Коллекторный двигатель — этот тип двигателя создает магнитное поле в намотанном роторе (вращающаяся деталь), пропуская электрический ток через узел коммутатора и угольной щетки, отсюда и термин «щеточный». Магнитное поле статоров (неподвижная часть) создается с помощью обмотки статора или постоянных магнитов. Обычно моторы с щеткой постоянного тока дешевые, маленькие и легко управляемые.
- Бесколлекторный двигатель — этот тип двигателя создает магнитное поле в роторе, используя постоянные магниты, прикрепленные к нему, и коммутация достигается с помощью электроники. Они, как правило, меньше, но дороже, чем обычные двигатели постоянного тока щеточного типа, потому что они используют переключатели «эффекта Холла» в статоре для получения требуемой последовательности вращения поля статора, но они имеют лучшие характеристики крутящего момента / скорости, более эффективны и имеют более длительный срок эксплуатации. чем эквивалентные коллекторные типы.
- Серводвигатель — этот тип двигателя в основном представляет собой коллекторный двигатель постоянного тока с некоторой формой управления позиционной обратной связью, подключенной к валу ротора. Они подключены к контроллеру типа ШИМ и управляются им, и в основном используются в системах позиционного управления и радиоуправляемых моделях.
Обычные двигатели постоянного тока имеют почти линейные характеристики, скорость вращения которых определяется приложенным напряжением постоянного тока, а их выходной крутящий момент определяется током, протекающим через обмотки двигателя. Скорость вращения любого двигателя постоянного тока может варьироваться от нескольких оборотов в минуту (об / мин) до многих тысяч оборотов в минуту, что делает их пригодными для применения в электронике, автомобилестроении или робототехнике. При подключении их к коробкам передач или зубчатым передачам их выходная скорость может быть уменьшена, в то же время увеличивая крутящий момент двигателя на высокой скорости.
Коллекторный двигатель постоянного тока
Стандартный коллекторный двигатель постоянного тока состоит в основном из двух частей: неподвижного корпуса двигателя, называемого статором, и внутренней части, которая вращается, создавая движение, называемое ротором или «арматурой» для машин постоянного тока.
Обмотка статора двигателя представляет собой электромагнитную цепь, которая состоит из электрических катушек, соединенных вместе в круговую конфигурацию для создания необходимого северного полюса, затем южного полюса, затем северного полюса и т.д., типа стационарной системы магнитного поля для вращения, в отличие от машин переменного тока, чье поле статора постоянно вращается с приложенной частотой. Ток, который течет в этих полевых катушках, известен как ток поля двигателя.
Эти электромагнитные катушки, которые формируют поле статора, могут быть электрически соединены последовательно, параллельно или вместе с ротором двигателя. Последовательно намотанный двигатель постоянного тока имеет обмотки статора, соединенные последовательно с ротором. Аналогично, двигатель постоянного тока с шунтирующим витком имеет свои обмотки возбуждения статора, соединенные параллельно с ротором, как показано ниже.

Ротор постоянного тока состоит из токонесущих проводников, соединенных вместе на одном конце с электрически изолированными медными сегментами, называемыми коммутатором. Коммутатор позволяет осуществлять электрическое подключение через угольные щетки (отсюда и название «щеточный» двигатель) к внешнему источнику питания при вращении ротора.
Установленное ротором магнитное поле пытается выровнять себя с полем статора, заставляя ротор вращаться вокруг своей оси, но не может выровняться из-за задержек коммутации. Скорость вращения двигателя зависит от силы магнитного поля роторов, и чем больше напряжение подается на двигатель, тем быстрее вращается ротор. Изменяя это приложенное постоянное напряжение, можно также изменять частоту вращения двигателя.

Двигатель постоянного тока с щеточным постоянным магнитом (PMDC), как правило, намного меньше и дешевле, чем его эквивалентные родственники двигателя постоянного тока с обмоткой статора, поскольку они не имеют обмотки возбуждения. В двигателях с постоянными магнитами постоянного тока (PMDC) эти полевые катушки заменяются сильными магнитами типа редкоземельных элементов (например, самарий-коболт или неодим-железо-бор), которые имеют очень сильные магнитные энергетические поля.
Использование постоянных магнитов дает двигателю постоянного тока намного лучшую линейную характеристику скорости / крутящего момента, чем эквивалентные намотанные двигатели из-за постоянного и иногда очень сильного магнитного поля, что делает их более подходящими для использования в моделях, робототехнике и сервоприводах.
Хотя щеточные электродвигатели постоянного тока очень эффективны и дешевы, проблемы, связанные с щеточным электродвигателем постоянного тока, заключаются в том, что искрение возникает в условиях большой нагрузки между двумя поверхностями коммутатора и угольных щеток, что приводит к самогенерированию тепла, короткому сроку службы и электрическому шуму из-за искрения, что может повредить любое полупроводниковое коммутационное устройство, такое как МОП-транзистор или транзистор. Чтобы преодолеть эти недостатки, были разработаны бесщеточные или бесколлекторные двигатели постоянного тока.
Бесколлекторный двигатель постоянного тока
Бесщеточный (бесколлекторный) двигатель постоянного тока (BDCM) очень похож на двигатель постоянного тока с постоянными магнитами, но не имеет щеток для замены или износа из-за искрения коммутатора. Поэтому в роторе выделяется мало тепла, что увеличивает срок службы двигателей. Конструкция бесщеточного двигателя устраняет необходимость в щетках благодаря более сложной схеме привода, в которой магнитное поле ротора является постоянным магнитом, который всегда синхронизирован с полем статора, что позволяет более точно контролировать скорость и крутящий момент.
Тогда конструкция бесщеточного двигателя постоянного тока очень похожа на двигатель переменного тока, что делает его истинным синхронным двигателем, но одним недостатком является то, что он дороже, чем аналогичная конструкция «щеточного» двигателя.
Управление бесщеточными двигателями постоянного тока очень отличается от обычного щеточного двигателя постоянного тока тем, что этот тип двигателя включает в себя некоторые средства для определения углового положения роторов (или магнитных полюсов), необходимые для получения сигналов обратной связи, необходимых для управления переключением полупроводников. Самым распространенным датчиком положения / полюса является «Датчик Холла», но некоторые двигатели также используют оптические датчики.
При использовании датчиков с эффектом Холла полярность электромагнитов переключается с помощью схемы управления двигателем. Тогда двигатель можно легко синхронизировать с цифровым тактовым сигналом, обеспечивая точное управление скоростью. Бесщеточные двигатели постоянного тока могут быть сконструированы так, чтобы иметь внешний ротор с постоянными магнитами и внутренний статор электромагнита или внутренний ротор с постоянными магнитами и внешний статор электромагнита.
Преимущества бесщеточного двигателя постоянного тока по сравнению с его «щеточным» кузеном заключаются в более высокой эффективности, высокой надежности, низком электрическом шуме, хорошем контроле скорости и, что более важно, отсутствии износа щеток или коммутатора, что обеспечивает значительно более высокую скорость. Однако их недостатком является то, что они более дороги и сложнее в управлении.
Серводвигатель постоянного тока
Серводвигатели постоянного тока используются в системах с замкнутым контуром, в которых положение выходного вала двигателя возвращается обратно в цепь управления двигателем. Типичные позиционные устройства «обратной связи» включают в себя резольверы, энкодеры и потенциометры, используемые в моделях радиоуправления, таких как самолеты, лодки и т.д.
Серводвигатель, как правило, включает в себя встроенную коробку передач для снижения скорости и способен напрямую выдавать высокие крутящие моменты. Выходной вал серводвигателя не вращается свободно, как валы двигателей постоянного тока из-за присоединения редуктора и устройств обратной связи.
Блок-схема серводвигателя постоянного тока

Серводвигатель состоит из двигателя постоянного тока, редуктора, устройства позиционной обратной связи и некоторой формы коррекции ошибок. Скорость или положение контролируется по отношению к позиционному сигналу входного сигнала или опорного приложенному к устройству.

Усилитель обнаружения ошибок просматривает этот входной сигнал и сравнивает его с сигналом обратной связи с выходного вала двигателя и определяет, находится ли выходной вал двигателя в состоянии ошибки, и, если это так, контроллер вносит соответствующие исправления, либо ускоряя двигатель, либо замедляя его вниз. Эта реакция на устройство позиционной обратной связи означает, что серводвигатель работает в «замкнутой системе».
Наряду с крупными промышленными применениями серводвигатели также используются в небольших моделях с дистанционным управлением и робототехнике, причем большинство серводвигателей способны вращаться примерно на 180 градусов в обоих направлениях, что делает их идеальными для точного углового позиционирования. Тем не менее, эти сервоприводы типа RC не могут непрерывно вращаться на высокой скорости, как обычные двигатели постоянного тока, если специально не модифицированы.
Серводвигатель состоит из нескольких устройств в одном корпусе, двигателя, коробки передач, устройства обратной связи и коррекции ошибок для контроля положения, направления или скорости. Они широко используются в робототехнике и небольших моделях, так как ими легко управлять, используя всего три провода: питание , заземление и управление сигналами.
Переключение и контроль двигателя постоянного тока
Небольшие двигатели постоянного тока могут быть включены «Вкл» или выключены «Выкл» с помощью переключателей, реле, транзисторов или МОП-транзисторов, причем простейшей формой управления двигателем является «линейное» управление. Схема этого типа использует биполярный транзистор в качестве переключателя (транзистор Дарлингтона также может использоваться, если требуется более высокий номинальный ток) для управления двигателем от одного источника питания.
Изменяя величину тока базы, протекающего в транзистор, можно управлять скоростью двигателя, например, если транзистор включен наполовину, тогда только половина напряжения питания поступает на двигатель. Если транзистор включен полностью (насыщен), то все напряжение питания поступает на двигатель и вращается быстрее. Затем для этого линейного типа управления мощность постоянно подается на двигатель, как показано ниже.
Контроль скорости двигателя

Простая схема переключения, приведенная выше, показывает схему для однонаправленной (только в одном направлении) цепи управления скоростью двигателя. Поскольку скорость вращения двигателя постоянного тока пропорциональна напряжению на его клеммах, мы можем регулировать это напряжение на клеммах с помощью транзистора.
Два транзистора соединены в виде пары Дарлингтона для управления током основного ротора двигателя. 5 кОм потенциометр используется для регулирования количества базового привода на первый пилот — транзистора TR 1 , который, в свою очередь, контролирует главный коммутационный транзистор TR 2 , позволяя изменять напряжение постоянного тока двигателя от нуля до Vcc, в этом примере от 9 до 12 вольт.
Опциональные диоды маховика подключены к переключающему транзистору TR 2 и клеммам двигателя для защиты от любой обратной ЭДС, создаваемой двигателем при его вращении. Регулируемый потенциометр может быть заменен непрерывным логическим «1» или логическим «0» сигналом, подаваемым непосредственно на вход цепи, чтобы переключить двигатель «полностью включено» (насыщение) или «полностью выключено» (отключение) соответственно из порта микроконтроллера или ПОС.
Наряду с этим базовым контролем скорости, та же схема также может использоваться для управления скоростью вращения двигателей. Путем многократного переключения тока двигателя «ВКЛ» и «ВЫКЛ» на достаточно высокой частоте, скорость двигателя можно варьировать от состояния покоя (0 об / мин) до полной скорости (100%), изменяя отношение бестокового пространства к его запасу. Это достигается путем изменения соотношения времени включения (t ON ) и времени выключения (t OFF ), и это может быть достигнуто с помощью процесса, известного как широтно-импульсная модуляция (ШИМ).
Регулировка скорости импульса
Ранее мы говорили, что скорость вращения двигателя постоянного тока прямо пропорциональна среднему значению напряжения на его клеммах, и чем выше это значение, вплоть до максимально допустимого напряжения двигателя, тем быстрее будет вращаться двигатель. Другими словами, больше напряжения, больше скорости. Изменяя соотношение между временем «ВКЛ» (t ВКЛ ) и временем «ВЫКЛ» (t ВЫКЛ ), которое называется «Коэффициент заполнения», или «Рабочий цикл», среднее значение напряжения двигателя и, следовательно, его скорость вращения может варьироваться. Для простых униполярных приводов коэффициент заполнения β задается как:

и среднее выходное напряжение постоянного тока, подаваемое на двигатель, определяется как: Vmean = β x Vsupply. Затем, изменяя ширину импульса а, можно управлять напряжением двигателя и, следовательно, мощностью, подаваемой на двигатель, и этот тип управления называется широтно-импульсной модуляцией или ШИМ.
Другим способом управления частотой вращения двигателя является изменение частоты (и, следовательно, периода времени управляющего напряжения), в то время как времена коэффициента включения «ВКЛ» и «ВЫКЛ» поддерживаются постоянными. Этот тип управления называется частотно-импульсной модуляцией или PFM .
При частотно-импульсной модуляции напряжение двигателя регулируется путем подачи импульсов переменной частоты, например, на низкой частоте или с очень небольшим количеством импульсов, среднее напряжение, подаваемое на двигатель, является низким, и, следовательно, скорость двигателя является низкой. При более высокой частоте или множестве импульсов среднее напряжение на клеммах двигателя увеличивается, и скорость двигателя также увеличивается.
Затем транзисторы можно использовать для управления количеством энергии, подаваемой на двигатель постоянного тока с режимом работы: «линейная» (изменение напряжения двигателя), «широтно-импульсная модуляция» (изменение ширины импульса) или «частотно — импульсная модуляция»(изменение частоты импульса).
Изменение направления движения двигателя постоянного тока
Хотя управление скоростью двигателя постоянного тока с помощью одного транзистора имеет много преимуществ, оно также имеет один главный недостаток: направление вращения всегда одинаковое, это «однонаправленная» схема. Во многих случаях нам необходимо управлять двигателем в обоих направлениях вперед и назад.
Для управления направлением двигателя постоянного тока необходимо поменять полярность питания постоянного тока, подаваемого на соединения двигателя, чтобы его вал вращался в противоположном направлении. Один очень простой и дешевый способ управления направлением вращения двигателя постоянного тока состоит в использовании различных переключателей, расположенных следующим образом:

В первом контуре используется одинарный двухполюсный, двухходовый переключатель (DPDT) для контроля полярности соединений двигателей. При переключении контактов подача на клеммы двигателя изменяется, и двигатель меняет направление. Второй контур немного сложнее и использует четыре однополюсных, одноходовых (SPST) переключателя, расположенных в «H» -конфигурации.
Механические переключатели расположены в виде пары переключений и должны работать в определенной комбинации для работы или остановки двигателя постоянного тока. Например, комбинация переключателей A + D управляет вращением вперед, в то время как переключатели B + C управляют вращением назад, как показано на рисунке. Комбинации переключателей A + B или C + D замыкают клеммы двигателя, вызывая его быстрое торможение. Тем не менее, использование переключателей таким образом имеет свои опасности, так как рабочие переключатели A + C или B + D вместе отключат источник питания.
В то время как две вышеупомянутые схемы будут очень хорошо работать для большинства небольших двигателей постоянного тока, мы действительно хотим использовать различные комбинации механических переключателей только для изменения направления вращения двигателя, НЕТ! Мы могли бы изменить ручные переключатели для набора электромеханических реле и иметь одну кнопку прямого или обратного хода или даже использовать твердотельный четырехпозиционный двусторонний переключатель CMOS 4066B.
Но еще один очень хороший способ достижения двунаправленного управления двигателем (а также его скоростью) состоит в том, чтобы подключить двигатель к схеме транзисторного типа H-моста, как показано ниже.
H-мостовая схема двигателя

Схема H-моста, приведенная выше, названа так потому, что базовая конфигурация четырех переключателей, либо электромеханических реле, либо транзисторов, напоминает букву «H» с двигателем, расположенным на центральной шине. Транзистор или МОП-транзистор является, вероятно, одним из наиболее часто используемых типов двунаправленных цепей управления двигателем постоянного тока. Он использует «комплементарные пары транзисторов» как NPN, так и PNP в каждой ветви, причем транзисторы попарно объединяются для управления двигателем.
Управляющий вход A управляет двигателем в одном направлении, т.е. вращением вперед, в то время как вход B управляет двигателем в другом направлении, т.е. обратным вращением. Затем переключение транзисторов «ВКЛ» или «ВЫКЛ» в их «диагональных парах» приводит к направленному управлению двигателем.
Например, когда транзистор TR1 включен, а транзистор TR2 выключен, точка A подключена к напряжению питания (+ Vcc), а если транзистор TR3 выключен, а транзистор TR4 включен, точка B подключена к 0 вольт (GND). Затем двигатель будет вращаться в одном направлении, соответствующем положению клеммы А двигателя и положительной клемме В двигателя.
Если состояния переключения меняются местами так, что TR1 — «ВЫКЛ», TR2 — «ВКЛ», TR3 — «ВКЛ» и TR4 — «ВЫКЛ», ток двигателя будет течь в противоположном направлении, вызывая вращение двигателя в противоположном направлении.
Затем, применяя противоположные логические уровни «1» или «0» к входам A и B, направление вращения двигателя можно регулировать следующим образом.
Таблица истинности H-моста
| Вход А | Вход B | Функция двигателя |
| TR1 и TR4 | TR2 и TR3 | |
| 0 | 0 | Двигатель остановлен (OFF) |
| 1 | 0 | Мотор вращается вперед |
| 0 | 1 | Мотор вращается задним ходом |
| 1 | 1 | НЕ ПОЛОЖЕНО |
Важно, чтобы никакая другая комбинация входов не допускалась, так как это может привести к короткому замыканию источника питания, то есть оба транзистора, TR1 и TR2, были включены в одно и то же время (предохранитель = взрыв!).
Как и в случае однонаправленного управления двигателем постоянного тока, как показано выше, скорость вращения двигателя также можно регулировать с помощью широтно-импульсной модуляции или ШИМ. Затем, комбинируя переключение Н-моста с ШИМ-управлением, можно точно контролировать направление и скорость двигателя.
Имеющиеся в продаже готовые ИС- декодеры, такие как четырехполупроводниковая ИС H-моста SN754410 или L298N с двумя H-мостами, доступны со всей необходимой встроенной логикой управления и безопасности, специально разработанные для двунаправленных цепей управления двигателем H-моста.
Сейчас невозможно представить нашу жизнь без электродвигателей. Они приводят в действие станки, бытовую технику и инструменты, поезда, трамваи и троллейбусы, компьютеры, игрушки и разные подвижные механизмы, устанавливаются на производственных станках, если частоту вращения рабочего вала требуется регулировать в широком диапазоне. Агрегаты для преобразования электрической энергии в механическую представлены множеством видов и моделей (синхронные, асинхронные, коллекторные и т.д.). Из этой статьи вы узнаете, что такое электродвигатель постоянного тока, его устройство и принцип действия.
Краткая история создания
Разные ученые пытались создать экономичный и мощный двигатель еще с первой половины 19 века. Основой послужило открытие М.Фарадея, сделанное в 1821 г. Он обнаружил, что помещенный в магнитное поле проводник вращается. Отталкиваясь от этого, в 1833 г изобретатель Томас Дэвенпорт смог сконструировать двигатель постоянного тока, а позже, в 1834 г, ученый Б.С.Якоби придумал прообраз современной модели двигателя с вращающимся валом. Устройство, более похожее на современные агрегаты, появилось в 1886 г, и до сегодняшнего дня электродвигатель продолжает совершенствоваться.
Принцип действия электродвигателя постоянного тока
На мысль о создании двигателя ученых натолкнуто следующее открытие. Помещенная в магнитное поле проволочная рамка с пропущенным по ней током начинает вращаться, создавая механическую энергию. Принцип действия электродвигателя постоянного тока основывается на взаимодействии магнитных полей рамки и самого магнита. Но одна рамка после определенного количества вращений замирает в положении, параллельном внешнему магнитному полю. Для продолжения движения необходимо добавить вторую рамку и в определенный момент переключить направление тока.
Вместо рамок в двигателе используется набор проводников, на которые подается ток, и якорь. При запуске вокруг него возбуждается магнитное поле, взаимодействующее с полем обмотки. Это заставляет якорь повернуться на определенный угол. Подача тока на следующие проводники приводит к следующему повороту якоря, и далее процесс продолжается.
Магнитное поле создается либо с помощью постоянного магнита (в маломощных агрегатах), либо с помощью индуктора/обмотки возбуждения (в более мощных устройствах).
Попеременную зарядку проводников якоря обеспечивают щетки, сделанные из графита или сплава графита и меди. Они служат контактами, замыкающими электрическую сеть на выводы пар проводников. Изолированные друг от друга выводы представляют собой кольцо из нескольких ламелей, которое находится на оси вала якоря и называется коллекторным узлом. Благодаря поочередному замыканию ламелей щетками двигатель вращается равномерно. Степень равномерности работы двигателя зависит от количества проводников (чем больше, тем равномернее).
Устройство электродвигателя постоянного тока
Теперь, когда вы знаете, как работает электродвигатель постоянного тока, пора ознакомиться с его конструкцией.Как и у других моделей, основу двигателя составляют статор (индуктор) – неподвижная часть, и якорь вкупе с щеточноколлекторным узлом – подвижная часть. Обе части разделены воздушным зазором.
В состав статора входят станина, являющаяся элементом магнитной цепи, а также главные и добавочные полюса. Обмотки возбуждения, необходимые для создания магнитного поля, находятся на главных полюсах. Специальная обмотка, улучшающая условия коммутации, расположена на добавочных полюсах.
Якорь представляет собой узел, состоящий из магнитной системы (она собрана из нескольких листов), набора обмоток (проводников), уложенных в пазы, и коллектора, который подводит постоянный ток к рабочей обмотке.
Коллектор имеет вид цилиндра, собранного из изолированных медных пластин. Он насажен на вал двигателя и имеет выступы, к которым подходят концы секций обмотки якоря. Щетки снимают ток с коллектора, входя с ним в скользящий контакт. Удержание щеток в нужном положении и обеспечение их нажатия на коллектор с определенной силой осуществляется щеткодержателями.
Многие модели двигателей оснащены вентилятором, задача которого – охлаждение агрегата и увеличение продолжительности рабочего периода.
Особенности и характеристики электродвигателя постоянного тока
Эксплуатационные характеристики электродвигателя постоянного тока позволяют широко использовать это устройство в самых разных сферах – от бытовых приборов до транспорта. К его преимуществам можно отнести:
- Экологичность. При работе не выделяются вредные вещества и отходы.
- Надежность. Благодаря довольно простой конструкции он редко ломается и служит долго.
- Универсальность. Он может использоваться в качестве как двигателя, так и генератора.
- Простота управления.
- Возможность регулирования частоты и скорости вращения вала – достаточно подключить агрегат в цепь переменного сопротивления.
- Легкость запуска.
- Небольшие размеры.
- Возможность менять направление вращения вала. В двигателе с последовательным возбуждением нужно изменить направление тока в обмотке возбуждения, во всех остальных типах – в якоре.
Как и любое устройство, электродвигатели постоянного тока имеют и «слабые стороны»:
- Их себестоимость, следовательно, и цена достаточно высока.
- Для подключения к сети необходим выпрямитель тока.
- Самая уязвимая и быстроизнашивающаяся деталь – щетки – требует периодической замены.
- При сильной перегрузке может случиться возгорание. Если соблюдать правила эксплуатации, такая возможность исключена.
Но, как видите, достоинства явно перевешивают, поэтому на данный момент электродвигатель является одним из наиболее экономичных и эффективных устройств. Зная устройство и принцип работы электродвигателя постоянного тока, вы сможете самостоятельно собрать и разобрать его для техосмотра, чистки или устранения неисправностей.
устройство, принцип работы, типы, управление
Эра электродвигателей берёт своё начало с 30-х годов XIX века, когда Фарадей на опытах доказал способность вращения проводника, по которому проходит ток, вокруг постоянного магнита. На этом принципе Томасом Девенпортом был сконструирован и испытан первый электродвигатель постоянного тока. Изобретатель установил своё устройство на действующую модель поезда, доказав тем самым работоспособность электромотора.
Практическое применение ДПТ нашёл Б. С. Якоби, установив его на лодке для вращения лопастей. Источником тока учёному послужили 320 гальванических элементов. Несмотря на громоздкость оборудования, лодка могла плыть против течения, транспортируя 12 пассажиров на борту.
Лишь в конце XIX столетия синхронными электродвигателями начали оснащать промышленные машины. Этому способствовало осознание принципа преобразования электродвигателем постоянного тока механической энергии в электричество. То есть, используя электродвигатель в режиме генератора, удалось получать электроэнергию, производство которой оказалось существенно дешевле от затрат на выпуск гальванических элементов. С тех пор электродвигатели совершенствовались и стали завоёвывать прочные позиции во всех сферах нашей жизнедеятельности.
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.
 Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока.
Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока.Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.
Схемы подключения наглядно видно на рисунке 2.
 Рисунок 2. Схемы подключения обмоток статора ДПТ
Рисунок 2. Схемы подключения обмоток статора ДПТУ каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.
 Рисунок 3. Ротор с тремя обмотками
Рисунок 3. Ротор с тремя обмотками Рисунок 4. Якорь со многими обмотками
Рисунок 4. Якорь со многими обмоткамиПодобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.
 Рисунок 5. Схема электромотора с многообмоточным якорем
Рисунок 5. Схема электромотора с многообмоточным якорем Коллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Самый простой коллектор состоит из двух, изолированных полукруглых пластин. Каждая из них в определённый момент контактирует со щёткой, с которой снимается напряжение. Одна ламель всегда подсоединена к плюсу, а вторая – к минусу. При повороте вала на 180º пластины коллектора меняются местами, вследствие чего происходит новая коммутация со сменой полярности.
Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.
Принцип работы
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.
 Рис. 6. Принцип работы ДПТ
Рис. 6. Принцип работы ДПТЕсли вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Типы ДПТ
Существующие электродвигатели постоянного тока можно классифицировать по двум основным признакам: по наличию или отсутствию в конструкции мотора щеточно-коллекторного узла и по типу магнитной системы статора.
Рассмотрим основные отличия.
По наличию щеточно-коллекторного узла
Двигатели постоянного тока для коммутации обмоток, которых используются щёточно-коллекторные узлы, называются коллекторными. Они охватывают большой спектр линейки моделей электромоторов. Существуют двигатели, в конструкции которых применяется до 8 щёточно-коллекторных узлов.
Функции ротора может выполнять постоянный магнит, а ток от электрической сети подаётся непосредственно на обмотки статора. В таком варианте отпадает надобность в коллекторе, а проблемы, связанные с коммутацией, решаются с помощью электроники.
В таких бесколлекторных двигателях устранён один из недостатков –искрение, приводящее к интенсивному износу пластин коллектора и щёток. Кроме того, они проще в обслуживании и сохраняют все полезные характеристики ДПТ: простота в управлении связанном с регулировкой оборотов, высокие показатели КПД и другие. Бесколлекторные моторы носят название вентильных электродвигателей.
По виду конструкции магнитной системы статора
В конструкциях синхронных двигателей существуют модели с постоянными магнитами и ДПТ с обмотками возбуждения. Электродвигатели серий, в которых применяются статоры с потоком возбуждения от обмоток, довольно распространены. Они обеспечивают стабильную скорость вращения валов, высокую номинальную механическую мощность.
О способах подключения статорных обмоток шла речь выше. Ещё раз подчеркнём, что от выбора схемы подключения зависят электрические и тяговые характеристики двигателей постоянного тока. Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Управление
Не трудно понять, что если изменить полярность напряжения, то направление вращения якоря также изменится. Это позволяет легко управлять электромотором, манипулируя полярностью щеток.
Механическая характеристика
Рассмотрим график зависимости частоты от момента силы на валу. Мы видим прямую с отрицательным наклоном. Эта прямая выражает механическую характеристику электродвигателя постоянного тока. Для её построения выбирают определённое фиксированное напряжение, подведённое для питания обмоток ротора.
 Примеры механических характеристик ДПТ независимого возбуждения
Примеры механических характеристик ДПТ независимого возбуждения Регулировочная характеристика
Такая же прямая, но идущая с положительным наклоном, является графиком зависимости частоты вращения якоря от напряжения питания. Это и есть регулировочная характеристика синхронного двигателя.
Построение указанного графика осуществляется при определённом моменте развиваемом ДПТ.
 Пример регулировочных характеристик двигателя с якорным управлением
Пример регулировочных характеристик двигателя с якорным управлениемБлагодаря линейности характеристик упрощается управление электродвигателями постоянного тока. Поскольку сила F пропорциональна току, то изменяя его величину, например переменным сопротивлением, можно регулировать параметры работы электродвигателя.
Регулирование частоты вращения ротора легко осуществляется путём изменения напряжения. В коллекторных двигателях с помощью пусковых реостатов добиваются плавности увеличения оборотов, что особенно важно для тяговых двигателей. Это также один из эффективных способов торможения. Мало того, в режиме торможения синхронный электродвигатель вырабатывает электрическую энергию, которую можно возвращать в энергосеть.
Области применения
Перечислять все области применения электродвигателей можно бесконечно долго. Для примера назовём лишь несколько из них:
- бытовые и промышленные электроинструменты;
- автомобилестроение – стеклоподъёмники, вентиляторы и другая автоматика;
- трамваи, троллейбусы, электрокары, подъёмные краны и другие механизмы, для которых важны высокие параметры тяговых характеристик.
Преимущества и недостатки
К достоинствам относится:
- Линейная зависимость характеристик электродвигателей постоянного тока (прямые линии) упрощающие управление;
- Легко регулируемая частота вращения;
- хорошие пусковые характеристики;
- компактные размеры.
У асинхронных электродвигателей, являющихся двигателями переменного тока очень трудно достичь таких характеристик.
Недостатки:
- ограниченный ресурс коллектора и щёток;
- дополнительная трата времени на профилактическое обслуживание, связанное с поддержанием коллекторно-щёточных узлов;
- ввиду того, что мы пользуемся сетями с переменным напряжением, возникает необходимость выпрямления тока;
- дороговизна в изготовлении якорей.
По перечисленным параметрам из недостатков в выигрыше оказываются модели асинхронных двигателей. Однако во многих случаях применение электродвигателя постоянного тока является единственно возможным вариантом, не требующим усложнения электрической схемы.
Видео в дополнение к написанному
Электрические двигатели, приводящиеся в движение путем воздействия постоянного тока, применяются значительно реже, по сравнению с двигателями, работающими от переменного тока. В бытовых условиях электродвигатели постоянного тока используются в детских игрушках, с питанием от обычных батареек с постоянным током. На производстве электродвигатели постоянного тока приводят в действие различные агрегаты и оборудование. Питание для них подводится от мощных батарей аккумуляторов.
Устройство и принцип работы
Электродвигатели постоянного тока по конструкции подобны синхронным двигателям переменного тока, с разницей в типе тока. В простых демонстрационных моделях двигателя применяли один магнит и рамку с проходящим по ней током. Такое устройство рассматривалось в качестве простого примера. Современные двигатели являются совершенными сложными устройствами, способными развивать большую мощность.
Главной обмоткой двигателя служит якорь, на который подается питание через коллектор и щеточный механизм. Он совершает вращательное движение в магнитном поле, образованном полюсами статора (корпуса двигателя). Якорь изготавливается из нескольких обмоток, уложенных в его пазах, и закрепленных там специальным эпоксидным составом.
Статор может состоять из обмоток возбуждения или из постоянных магнитов. В маломощных двигателях используют постоянные магниты, а в двигателях с повышенной мощностью статор снабжен обмотками возбуждения. Статор с торцов закрыт крышками со встроенными в них подшипниками, служащими для вращения вала якоря. На одном конце этого вала закреплен охлаждающий вентилятор, который создает напор воздуха и прогоняет его по внутренней части двигателя во время работы.
Принцип действия такого двигателя основывается на законе Ампера. При размещении проволочной рамки в магнитном поле, она будет вращаться. Проходящий по ней ток создает вокруг себя магнитное поле, взаимодействующее с внешним магнитным полем, что приводит к вращению рамки. В современной конструкции мотора роль рамки играет якорь с обмотками. На них подается ток, в результате вокруг якоря создается магнитное поле, которое приводит его во вращательное движение.
Для поочередной подачи тока на обмотки якоря применяются специальные щетки из сплава графита и меди.
Выводы обмоток якоря объединены в один узел, называемый коллектором, выполненным в виде кольца из ламелей, закрепленных на валу якоря. При вращении вала щетки по очереди подают питание на обмотки якоря через ламели коллектора. В результате вал двигателя вращается с равномерной скоростью. Чем больше обмоток имеет якорь, тем равномернее будет работать двигатель.
Щеточный узел является наиболее уязвимым механизмом в конструкции двигателя. Во время работы медно-графитовые щетки притираются к коллектору, повторяя его форму, и с постоянным усилием прижимаются к нему. В процессе эксплуатации щетки изнашиваются, а токопроводящая пыль, являющаяся продуктом этого износа, оседает на деталях двигателя. Эту пыль необходимо периодически удалять. Обычно удаление пыли выполняют воздухом под большим давлением.
Щетки требуют периодического их перемещения в пазах и продувки воздухом, так как от накопившейся пыли они могут застрять в направляющих пазах. Это приведет к зависанию щеток над коллектором и нарушению работы двигателя. Щетки периодически требуют замены из-за их износа. В месте контакта коллектора со щетками также происходит износ коллектора. Поэтому при износе якорь снимают и на токарном станке протачивают коллектор. После проточки коллектора изоляция, находящаяся между ламелями коллектора стачивается на небольшую глубину, чтобы она не разрушала щетки, так как ее прочность значительно превышает прочность щеток.
Виды
Электродвигатели постоянного тока разделяют по характеру возбуждения:
Независимое возбуждение
При таком характере возбуждения обмотка подключается к внешнему источнику питания. При этом параметры двигателя аналогичны двигателю на постоянных магнитах. Обороты вращения настраиваются сопротивлением обмоток якоря. Скорость регулируют специальным регулировочным реостатом, включенным в цепь обмоток возбуждения. При значительном снижении сопротивления или при обрыве цепи ток якоря повышается до опасных величин.
Электродвигатели с независимым возбуждением запрещается запускать без нагрузки или с небольшой нагрузкой, так как его скорость резко возрастет, и двигатель выйдет из строя.
Параллельное возбуждение
Обмотки возбуждения и ротора соединяются параллельно с одним источником тока. При такой схеме ток обмотки возбуждения значительно ниже тока ротора. Параметры двигателей становятся слишком жесткими, их можно применять для привода вентиляторов и станков.
Регулировка оборотов двигателя обеспечивается реостатом в последовательной цепи с обмотками возбуждения или в цепи ротора.
Последовательное возбуждение
В этом случае возбуждающая обмотка подключается последовательно с якорем, в результате чего по этим обмоткам проходит одинаковый ток. Обороты вращения такого мотора зависят от его нагрузки. Двигатель нельзя запускать на холостом ходу без нагрузки. Однако такой двигатель обладает приличными пусковыми параметрами, поэтому подобная схема используется в работе тяжелого электротранспорта.
Смешанное возбуждение
Такая схема предусматривает применение двух обмоток возбуждения, находящихся парами на каждом полюсе двигателя. Эти обмотки можно соединять двумя способами: с суммированием потоков, либо с их вычитанием. В итоге электродвигатель может обладать такими же характеристиками, как у двигателей с параллельным или последовательным возбуждением.
Чтобы заставить двигатель вращаться в другую сторону, на одной из обмоток изменяют полярность. Для управления скоростью вращения мотора и его запуском используют ступенчатое переключение разных резисторов.
Особенности эксплуатации
Электродвигатели постоянного тока отличаются экологичностью и надежностью. Их главным отличием от двигателей переменного тока является возможность регулировки оборотов вращения в большом диапазоне.
Такие электродвигатели постоянного тока можно также применять в качестве генератора. Изменив направление тока в обмотке возбуждения или в якоре, можно изменять направление вращения двигателя. Регулировка оборотов вала двигателя осуществляется с помощью переменного резистора. В двигателях с последовательной схемой возбуждения это сопротивление расположено в цепи якоря и позволяет уменьшить скорость вращения в 2-3 раза.
Этот вариант подходит для механизмов с длительным временем простоя, так как при работе реостат сильно нагревается. Повышение оборотов создается путем включения в цепь возбуждающей обмотки реостата.
Для моторов с параллельной схемой возбуждения в цепи якоря также применяются реостаты для уменьшения оборотов в два раза. Если в цепь обмотки возбуждения подключить сопротивление, то это позволит повышать обороты до 4 раз.
Применение реостата связано с выделением тепла. Поэтому в современных конструкциях двигателей реостаты заменяют электронными элементами, управляющими скоростью без сильного нагревания.
На коэффициент полезного действия мотора, работающего на постоянном токе, влияет его мощность. Слабые электродвигатели постоянного тока обладают малой эффективностью, и их КПД около 40%, в то время, как электродвигатели мощностью 1 МВт могут обладать коэффициентом полезного действия до 96%.
Преимущества электродвигателей постоянного тока
- Небольшие габаритные размеры.
- Легкое управление.
- Простая конструкция.
- Возможность применения в качестве генераторов тока.
- Быстрый запуск, особенно характерный для моторов с последовательной схемой возбуждения.
- Возможность плавной регулировки скорости вращения вала.
Недостатки
- Для подключения и эксплуатации необходимо приобретать специальный блок питания постоянного тока.
- Высокая стоимость.
- Наличие расходных элементов в виде медно-графитных быстроизнашивающихся щеток, изнашивающегося коллектора, что значительно снижает срок эксплуатации, и требует периодического технического обслуживания.
Сфера использования
Широко популярными двигатели постоянного тока стали в электрическом транспорте. Такие двигатели обычно входят в конструкции:
- Электромобилей.
- Электровозов.
- Трамваев.
- Электричек.
- Троллейбусов.
- Подъемно-транспортных механизмов.
- Детских игрушек.
- Промышленного оборудования с необходимостью управлением скорости вращения в большом диапазоне.
Похожие темы:
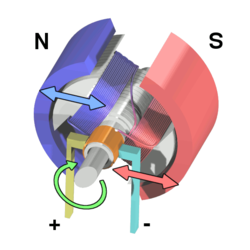
Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором
Двигатель постоянного тока — электрическая машина, машина постоянного тока, преобразующая электрическую энергию постоянного тока в механическую энергию.
История
Краткое описание коллекторного двигателя постоянного тока
Простейший двигатель на рис. 1 является машиной постоянного тока, состоит из одного постоянного магнита на статоре, из одного электромагнита с явно выраженными полюсами на роторе (двухполюсного ротора с явно выраженными полюсами и с одной обмоткой из двух частей), щёточноколлекторного узла с двумя пластинами (ламелями) и двумя щётками. Имеет два положения ротора (две «мёртвые точки»), из которых невозможен самозапуск, и неравномерный крутящий момент, в первом приближении (магнитное поле полюсов статора B — равномерное (однородное) и др.) равный
 , где
, где  — число витков обмотки ротора,
— число витков обмотки ротора,  — индукция магнитного поля полюсов статора,
— индукция магнитного поля полюсов статора,  — ток в обмотке ротора [А],
— ток в обмотке ротора [А],  — длина рабочей части витка обмотки [м],
— длина рабочей части витка обмотки [м],  — расстояние от оси ротора до рабочей части витка обмотки ротора (радиус) [м],
— расстояние от оси ротора до рабочей части витка обмотки ротора (радиус) [м],  — синус угла между направлением северный-южный полюс статора и аналогичным направлением в роторе [рад],
— синус угла между направлением северный-южный полюс статора и аналогичным направлением в роторе [рад],  — угловая скорость [рад/сек],
— угловая скорость [рад/сек],  — время [сек].
— время [сек].
Из-за наличия угловой ширины щёток и углового зазора между пластинами (ламелями) коллектора в двигателе этой конструкции имеются динамически постоянно короткозамкнутые щётками части обмотки ротора. Число короткозамкнутых частей обмотки ротора равно числу щёток. Эти короткозамкнутые части обмотки ротора не участвует в создании общего крутящего момента.
Суммарная короткозамкнутая часть ротора в двигателях с одним коллектором равна:
 , где n — число щёток, alfa — угловая ширина одной щётки [радиан].
, где n — число щёток, alfa — угловая ширина одной щётки [радиан].
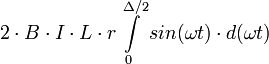
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент s рамок (витков) с током за один оборот равен площади под интегральной кривой крутящего момента, делённой на длину периода (1оборот =  ):
):

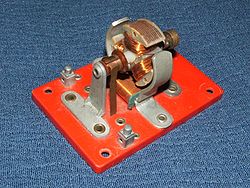
Рис. 2 Коллекторный двигатель постоянного тока с двухполюсным статором и с трёхполюсным ротором
Двигатель на рис. 2 состоит из одного электромагнита на статоре (двухполюсного статора) с явно выраженными полюсами и с одной обмоткой, трёхполюсного ротора с явно выраженными полюсами и с тремя обмотками (обмотки ротора могут быть включены звездой или треугольником), щёточноколлекторного узла с тремя пластинами (ламелями) и с двумя щётками. Самозапуск возможен из любого положения ротора. Имеет меньшую неравномерность крутящего момента, чем двигатель с двухполюсным ротором (рис. 1).
ДПТ являются обратимыми электрическими машинами, то есть в определённых условиях способны работать как генераторы.
Сокращение ДПТ (двигатель постоянного тока) является неудачным, так как название «двигатель переменного тока» имеет то же сокращение — ДПТ. Но так как двигатели переменного тока разделяются на ассинхронные (АД) и синхронные (СД), сокращение ДПТ относят к двигателям постоянного тока.
Статор
На статоре ДПТ располагаются в зависимости от конструкции:
- постоянные магниты
- электромагниты с обмотками возбуждения — катушки, наводящие магнитный поток возбуждения
В простейшем случае имеет два полюса, т.е. один магнит с одной парой полюсов.
Ротор
Состоит из электромагнитов с переключаемой полярностью и датчика положения ротора и переключателя (коллектора). В простейшем случае ротор состоит из одного электромагнита с двумя полюсами, т.е. имеет одну пару полюсов, при этом есть две «мёртвые точки» из которых невозможен самозапуск двигателя.
Рис. 3 Ротор
Ротор с тремя полюсами (полторы пары) имеет наименьшее число полюсов ротора при которых самозапуск возможен из любого положения ротора. На самом деле один полюс всё время делится на две части, т.е. ротор имеет неявные две пары полюсов. Ротор любого ДПТ состоит из многих катушек, на часть которых подаётся питание в зависимости от угла поворота ротора относительно статора. Применение большого числа (несколько десятков) катушек необходимо для уменьшения неравномерности крутящего момента, для уменьшения коммутируемого (переключаемого) тока, для обеспечения оптимального взаимодействия между магнитными полями ротора и статора (то есть для создания максимального момента на роторе).
При вычислении момента инерции ротора его в первом приближении можно считать сплошным однородным цилиндром с моментом инерции равным  где
где  — масса цилиндра (ротора), а
— масса цилиндра (ротора), а  — радиус цилиндра (ротора).
— радиус цилиндра (ротора).
Коллектор (коллекторный узел, щёточный узел, коллекторно-щёточный узел, щёточно-коллекторный узел)
Коллектор (щёточно-коллекторный узел) выполняет одновременно две функции — является датчиком углового положения ротора и переключателем тока со скользящими контактами.
Конструкции коллекторов имеют множество разновидностей.
Выводы всех катушек объединяются в коллекторный узел. Коллекторный узел обычно представляет собой кольцо из изолированных друг от друга пластин-контактов (ламелей), расположенных по оси (вдоль оси) ротора. Существуют и другие конструкции коллекторного узла.
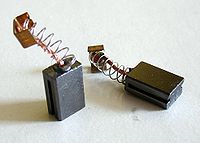
Рис. 4 Графитовые щётки
Щёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе и переключения тока в обмотках ротора. Щётка — неподвижный контакт (обычно графитовый или медно-графитовый).
Щётки часто размыкают и замыкают пластины-контакты коллектора ротора, как следствие при работе ДПТ происходят переходные процессы в обмотках ротора. Эти процессы приводят к искрению на коллекторе, что значительно снижает ресурс ДПТ. Искрение уменьшают выбором положения щёток относительно статора (снижая ток коммутации), а также подключением внешних реактивных элементов (конденсаторов).
При больших токах в роторе ДПТ возникают мощные переходные процессы, в результате чего искрение может постоянно охватывать все пластины коллектора, независимо от положения щёток. Данное явление называется кольцевым искрением коллектора или «круговой огонь». Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора не допустим, при проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем.
Классификация
- По виду магнитной системы статора
- С постоянными магнитами
- С электромагнитами
- По способу включения обмоток возбуждения электромагнитов статора
Двигатели постоянного тока различаются по способу коммутации обмоток возбуждения. Вид подключения обмоток возбуждения существенно влияет на тяговые и электрические характеристики электродвигателя. Существуют схемы независимого, параллельного, последовательного и смешанного включения обмоток возбуждения.
Принцип работы
В принципе работы электродвигателя постоянного тока есть два подхода: 1. рамка (2 стержня) с током в магнитном поле статора, 2. взаимодействие магнитных полей статора и ротора.
Рамка с током в однородном магнитном поле полюсов статора
В однородном магнитном поле полюсов статора с индукцией на два стержня рамки длиной с током действуют силы Ампера  постоянной величины, равные
постоянной величины, равные
 и направленные в противоположные стороны.
и направленные в противоположные стороны.
Эти силы прикладываются к плечам  , равным
, равным
 , где — радиус рамки, и создают крутящий момент
, где — радиус рамки, и создают крутящий момент  , равный
, равный
 .
.
Для двух стержней рамки суммарный крутящий момент равен
 . Практически из-за того, что угловая ширина щётки
. Практически из-за того, что угловая ширина щётки  [радиан] немного меньше угловой ширины зазора
[радиан] немного меньше угловой ширины зазора  между пластинами (ламелями) коллектора, чтобы источник питания не замыкался накоротко, четыре небольших части под кривой крутящего момента, равные
между пластинами (ламелями) коллектора, чтобы источник питания не замыкался накоротко, четыре небольших части под кривой крутящего момента, равные  , где
, где  , не участвуют в создании общего крутящего момента.
, не участвуют в создании общего крутящего момента.
При числе витков в обмотке равном s крутящий момент будет равен .
Наибольший крутящий момент будет при угле поворота рамки равном  , т.е. 90°, при этом угле поворота рамки с током вектора магнитных полей статора и ротора (рамки) будут перпендикулярны друг к другу, т.е. под углом 90°. При угле поворота ротора (рамки) 180° крутящий момент равен нулю из-за нулевого плеча, но силы не равны нулю и это положение ротора (рамки), при отсутствии переключения тока, весьма устойчиво и подобно одному шагу в шаговом двигателе.
, т.е. 90°, при этом угле поворота рамки с током вектора магнитных полей статора и ротора (рамки) будут перпендикулярны друг к другу, т.е. под углом 90°. При угле поворота ротора (рамки) 180° крутящий момент равен нулю из-за нулевого плеча, но силы не равны нулю и это положение ротора (рамки), при отсутствии переключения тока, весьма устойчиво и подобно одному шагу в шаговом двигателе.
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой крутящего момента делённой на длину периода  :
:

При s витков в обмотке

Две рамки с током в однородном магнитном поле полюсов статора
Если на роторе машины установить вторую рамку, сдвинутую относительно первой на угол π / 2, то получится четырёхполюсный ротор. Момент второй рамки:

Суммарный момент обеих рамок:

Таким образом получается, что крутящий момент зависит от угла поворота ротора, но неравномерность меньше, чем при одной рамке. Кроме этого добавляется самозапуск из любого положения ротора. При этом для второй рамки потребуется второй коллектор (щёточно-коллекторный узел). Оба узла соединяются параллельно, при этом переключение тока в рамках происходит в интервалах с наименьшим током в рамках, при последовательном соединении переключение тока в одной из рамок (разрыв цепи) происходит во время максимального тока в другой рамке. Практически, из-за того, что угловая ширина щётки α [рад] немного меньше угловой ширины зазора β [рад] между пластинами коллектора (ламелями) восемь небольших частей под кривой крутящего момента, равных
 , где Δ = β − α, не участвуют в создании общего крутящего момента.
, где Δ = β − α, не участвуют в создании общего крутящего момента.
Рамка с током в неоднородном магнитном поле полюсов статора
Если магнитное поле полюсов статора неоднородное и изменяется по отношению к стержням рамки по закону
 , то крутящий момент для одного стержня будет равен
, то крутящий момент для одного стержня будет равен
 ,
,
для двух стержней
 ,
,
для рамки из витков
 .
.
В создании крутящего момента не участвуют четыре части под кривой крутящего момента равные
 .
.
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой делённой на длину периода :

При s витках в обмотке

Две рамки с током в неоднородном магнитном поле полюсов статора
Для второй (косинусной) рамки  ,
,
крутящий момент от второй (косинусной) рамки будет равен
 ,
,
суммарный крутящий момент от обеих рамок равен
 , т.е. постоянен и от угла поворота ротора не зависит.
, т.е. постоянен и от угла поворота ротора не зависит.
Практически, из-за наличия зазора, восемь небольших частей под кривой крутящего момента равные
 каждая,
каждая,
в создании крутящего момента не участвуют.
Для вычисления момента инерции ротора его можно считать в первом приближении сплошным однородным цилиндром с моментом инерции
 , где — масса цилиндра (ротора), — радиус цилиндра (ротора).
, где — масса цилиндра (ротора), — радиус цилиндра (ротора).
Взаимодействие магнитных полей
Магнитные поля статора и ротора (рамки с током), взаимоотталкиваются, чем ротор (рамка) приводится во вращение на 180°. Для дальнейшего вращения необходимо переключение направления тока в рамке.
Разновидности
Коллекторные, с щёточноколлекторным переключателем тока
С одним коллектором (щёточноколлекторным узлом) и  обмотками, где
обмотками, где  — число пар полюсов ротора, с соединением обмоток ротора в кольцо (по этой классификации двигатель на рис. 2 является полуторным, имеет полторы пары полюсов и 2*1,5=3 обмотки ротора). Имеют большую короткозамкнутую щётками часть обмотки ротора, равную
— число пар полюсов ротора, с соединением обмоток ротора в кольцо (по этой классификации двигатель на рис. 2 является полуторным, имеет полторы пары полюсов и 2*1,5=3 обмотки ротора). Имеют большую короткозамкнутую щётками часть обмотки ротора, равную
 , где
, где  — число щёток, — угловая ширина одной щётки (рад),
— число щёток, — угловая ширина одной щётки (рад),  — число пи (3,14…).
— число пи (3,14…).
С двумя коллекторами (щёточноколлекторными узлами, в бесколлекторных с инвертором на двух параллельных мостах) и двумя обмотками синусной и косинусной (синусно-косинусный, двухфазный) с неоднородным (синусообразным) магнитным полем полюсов статора. Имеют малую нерабочую часть под кривой крутящего момента, равную
 , где
, где  — угловая ширина зазора между пластинами коллектора (ламелями), подобен двухфазному бесколлекторному.
— угловая ширина зазора между пластинами коллектора (ламелями), подобен двухфазному бесколлекторному.
С тремя коллекторами и тремя обмотками (в бесколлекторных с инвертором на трёх параллельных мостах, трёхфазный).
С четырьмя коллекторами (щёточноколлекторными узлами) и двумя обмотками синусной и косинусной (синусно-косинусные), специальные. Специальная конструкция коллектора с четырьмя коллекторами (один коллектор на одну щётку) позволяет почти до нуля уменьшить нерабочую часть крутящего момента (нерабочая часть крутящего момента в этом двигателе зависит от точности изготовления деталей) и сделать используемую часть крутящего момента независимой от угловой ширины щётки. При этом угловая ширина одной пластины коллектора равна  , где — угловая ширина одной щётки.
, где — угловая ширина одной щётки.
С четырьмя коллекторами и четырьмя обмотками (в бесколлекторных — с инвертором на четырёх параллельных мостах, четырёхфазный).
С восемью коллекторами (щёточноколлекторными узлами). В этом двигателе уже нет рамок, а ток подаётся через коллекторы в отдельные стержни ротора.
И др.
Другие виды электродвигателей постоянного тока
Применение
- Электропривод тепловозов, теплоходов, карьерных самосвалов
- Стартёры автомобилей, тракторов и др. Для уменьшения номинального напряжения двигателя в автомобильных стартёрах применяют двигатель постоянного тока с четырьмя щётками, при этом эквивалентное комплексное сопротивление ротора уменьшается почти в четыре раза, при этом статор имеет четыре полюса (две пары полюсов). Пусковой ток в автомобильных стартёрах около 200 ампер. Режим работы — кратковременный.
Бесколлекторные, с электронным переключателем тока
Электронным аналогом щёточно-коллекторного узла является инвертор с датчиком положения ротора (ДПР) (Вентильный электродвигатель).
Ротор является постоянным магнитом, а обмотки статора переключаются электронными схемами — инверторами. Бесколлекторные электродвигатели могут быть однофазными (две «мёртвые точки»), двухфазными (синусно-косинусными), трёх- и более фазными.
Бесколлекторный двигатель постоянного тока с выпрямителем (мостом) может заменить универсальный коллекторный двигатель (УКД).
Управление ДПТ
Механическая характеристика ДПТ
Зависимость частоты от момента на валу ДПТ. Отображается в виде графика. Горизонтальная ось (абсцисс) — момент на валу ротора, вертикальная ось (ординат) — частота вращения ротора. Механическая характеристика ДПТ есть прямая, идущая с отрицательным наклоном.
Механическая характеристика ДПТ строится при определённом напряжении питания обмоток ротора. В случае построения характеристик для нескольких значений напряжения питания говорят о семействе механических характеристик ДПТ.
Регулировочная характеристика ДПТ
Зависимость частоты вращения ротора от напряжения питания обмоток ротора ДПТ. Отображается в виде графика. Горизонтальная ось (абцисс) — напряжение питания обмоток ротора, вертикальная ось (ординат) — частота вращения ротора. Регулировочная характеристика ДПТ есть прямая, идущая с положительным наклоном.
Регулировочная характеристика ДПТ строится при определённом моменте, развиваемом двигателем. В случае построения регулировочных характеристик для нескольких значений момента на валу ротора говорят о семействе регулировочных характеристик ДПТ.
Управление ДПТ
Основные формулы, используемые при управлении ДПТ:
Крутящий момент, развиваемый двигателем, пропорционален току в обмотке якоря (ротора):
 , где
, где  — ток в обмотке якоря,
— ток в обмотке якоря,  — коэффициент крутящего момента двигателя (зависит от конструкции двигателя и тока в обмотке возбуждения).
— коэффициент крутящего момента двигателя (зависит от конструкции двигателя и тока в обмотке возбуждения).
Ток в обмотке ротора по закону Ома прямо пропорционален приложенному напряжению и обратно пропорционален сопротивлению обмотки ротора:
 , где
, где  — напряжение, приложенное к обмотке ротора,
— напряжение, приложенное к обмотке ротора,  — сопротивление обмотки ротора.
— сопротивление обмотки ротора.
ПротивоЭДС в обмотках якоря пропорциональна угловой частоте вращения ротора:
 , где
, где  — коэффициент ЭДС двигателя,
— коэффициент ЭДС двигателя,  — угловая скорость вращения ротора.
— угловая скорость вращения ротора.
Следовательно, величиной крутящего момента можно управлять меняя напряжение на ДПТ. Такой способ применяют для относительно маломощных двигателей.
Для управления более сильными (мощными) двигателями используют: а) принцип ШИМ, когда изменяется не величина напряжения, а длительность его приложения к двигателю, б) регулирование крутящего момента изменением напряжения на обмотке возбуждения, требует меньшую мощность элементов схемы управления, чем регулирование изменением напряжения на всём двигателе, но при этом способе регулирования ток через обмотку якоря не управляется, из-за этого даже при малом крутящем моменте большой ток через обмотку якоря будет нагревать обмотку якоря, что может привести к перегреву и выходу из строя двигателя. Возможно применение для регулирования крутящего момента в небольших пределах от номинального крутящего момента.
Управление двигателем осуществляется по току в обмотке двигателя, который пропорционален напряжению, приложенному к этой обмотке. Реакцию двигателя на данное напряжение при определённом внешнем моменте можно увидеть на соответствующей регулировочной характеристике. Регулировочная характеристика показывает скорость, которую двигатель достигнет в установившемся режиме.
Достоинства и недостатки ДПТ
Достоинства:
- Простота устройства и управления
- Практически линейные механическая и регулировочная характеристики двигателя
- Легко регулировать частоту вращения.
- Хорошие пусковые свойства (большой пусковой момент).
Недостатки:
- Необходимость профилактического обслуживания коллекторно-щёточных узлов
- Ограниченный срок службы из-за износа коллектора
См. также
Ссылки
Wikimedia Foundation. 2010.
Как работает двигатель постоянного тока ?
Дорогие мои читатели, начинаем разбирать темы августовского стола заказов (боже мой, как быстро летит время!). Сегодняшняя тема может быть мало кого заинтересует, зато если кого заинтересует, так это будет очень в пользу им. Слушаем trudnopisaka: Напишите пожалуйста понятно о устройстве электродвигателей постоянного тока. Можно на примере одного из типов. Ведь с одной стороны принцип работы очень простой, а с другой, если разобрать один из электродвигателей, то там много деталей, назначение которых не очевидно. А на сайтах в начале поисковой выдачи есть только название этих деталей, в лучшем случае. Планирую с детьми собрать простой электродвигатель, чтобы это помогло им в понимании техники и они не боялись ее осваивать.
Первый этап развития электродвигателя (1821-1832) тесно связан с созданием физических приборов для демонстрации непрерывного преобразования электрической энергии в механическую.
В 1821 году М. Фарадей, исследуя взаимодействие проводников с током и магнитом, показал, что электрический ток вызывает вращение проводника вокруг магнита или вращение магнита вокруг проводника. Опыт Фарадея подтвердил принципиальную возможность построения электрического двигателя.
Для второго этапа развития электродвигателей (1833-1860) характерны конструкции с вращательным движением якоря.
Томас Дэвенпорт — американский кузнец, изобретатель, в 1833 году сконструировал первый роторный электродвигатель постоянного тока, создал приводимую им в движение модель поезда. В 1837 году он получил патент на электромагнитную машину.
В 1834 году Б. С. Якоби создал первый в мире электрический двигатель постоянного тока, в котором реализовал принцип непосредственного вращения подвижной части двигателя. 13 сентября 1838 г. лодка с 12 пассажирами поплыла по Неве против течения со скоростью около 3 км/ч. Лодка была снабжена колесами с лопастями. Колеса приводились во вращение электрическим двигателем, который получал ток от батареи из 320 гальванических элементов. Так впервые электрический двигатель появился на судне.
Испытания различных конструкций электродвигателей привели Б. С. Якоби и других исследователей к следующим выводам:
- расширение применения электродвигателей находится в прямой зависимости от удешевления электрической энергии, т. е. от создания генератора, более экономичного, чем гальванические элементы;
- электродвигатели должны иметь по возможности малые габариты, большую мощность ибольший коэффициент полезного действия;
- этап в развитии электродвигателей связан с разработкой конструкций с кольцевым неявнополюсным якорем и практически постоянным вращающим моментом.
Третий этап развития электродвигателей характеризуется открытием и промышленным использованием принципа самовозбуждения, в связи с чем был окончательно осознан и сформулирован принцип обратимости электрической машины. Питание электродвигателей стало производиться от более дешёвого источника электрической энергии — электромагнитного генератора постоянного тока.
В 1886 году электродвигатель постоянного тока приобрёл основные черты современной конструкции. В дальнейшем он всё более и более совершенствовался.
В настоящее время трудно представить себе жизнь человечества без электродвигателя. Он используется в поездах, троллейбусах, трамваях. На заводах и фабриках стоят мощные электрические станки. Электромясорубки, кухонные комбайны, кофемолки, пылесосы — всё это используется в быту и оснащено электродвигателями.
Подавляющее большинство электрических машин работает по принципу магнитного отталкивания и притяжения. Если между северным и южным полюсами магнита поместить проволоку и пропустить по ней ток, то её вытолкнет наружу. Как это возможно? Дело в том, что проходя по проводнику, ток формирует вокруг себя круговое магнитное поле по всей длине провода. Направление этого поля определяют по правилу буравчика (винта).
При взаимодействии кругового поля проводника и однородного поля магнита, между полюсами магнитное поле с одной стороны ослабевает, а с другой усиливается. То есть среда становится упругой и результирующая сила выталкивает провод из поля магнита под углом 90 градусов в направлении, определяемом по правилу левой руки (правило правой руки используется для генераторов, а правило левой руки подходит только для двигателей). Эта сила называется «амперовой» и её величина определяется по закону Ампера F=BхIхL, где В – значение магнитной индукции поля; I – ток, циркулирующий в проводнике; L – длина провода.
Это явление использовали как основной принцип работы первых электродвигателей, этот же принцип используют и поныне. В двигателях постоянного тока малой мощности для создания постоянного магнитного поля применяются постоянные магниты. В электромоторах средней и большой мощности однородное магнитное поле создают с помощью обмотки возбуждения или индуктора.
Рассмотрим принцип создания механического движения с помощью электричества более подробно. На динамической иллюстрации показан простейший электромотор. В однородном магнитном поле вертикально располагаем проволочную рамку и пропускаем по ней ток. Что происходит? Рамка проворачивается и по инерции двигается какое-то время до достижения горизонтального положения. Это нейтральное положение – мёртвая точка — место, где воздействие поля на проводник с током равно нулю. Чтобы движение продолжилось, нужно добавить ещё хотя бы одну рамку и обеспечить переключение направление тока в рамке в нужный момент. На обучающем видео внизу страницы хорошо виден этот процесс.
Современный двигатель постоянного тока вместо одной рамки имеет якорь с множеством проводников, уложенных в пазы, а вместо постоянного подковообразного магнита имеет статор с обмоткой возбуждения с двумя и более полясами. На рисунке показан двухполюсный электромотор в разрезе. Принцип его работы следующий. Если по проводам верхней части якоря пропустить ток движущийся «от нас» (отмечено крестиком), а в нижней части — «на нас» (отмечено точкой), то согласно правилу левой руки верхние проводники будут выталкиваться из магнитного поля статора влево, а проводники нижней половины якоря по тому же принципу будут выталкиваться вправо. Поскольку медный провод уложен в пазах якоря, то, вся сила воздействия будет передаваться и на него, и он будет проворачиваться. Дальше видно, что когда проводник с направлением тока «от нас» провернётся вниз и станет против южного полюса создаваемого статором, то он будет выдавливаться в левую сторону, и произойдёт торможение. Чтобы этого не случилось нужно поменять направление тока в проводе на противоположное, как только будет пересечена нейтральная линия. Это делается с помощью коллектора – специального переключателя, коммутирующего обмотку якоря с общей схемой электродвигателя.
Таким образом, обмотка якоря передаёт вращающий момент на вал электромотора, а тот в свою очередь приводит в движение рабочие механизмы любого оборудования, такого как, например, станок для сетки рабицы. Хотя в этом случае используется асинхронный двигатель переменного тока, основной принцип его работы идентичен принципу действия двигателя постоянного тока – это выталкивание проводника с током из магнитного поля. Только у асинхронного электромотора вращающееся магнитное поле, а у электродвигателя постоянного тока – поле статичное.
Конструктивно все электрические двигатели постоянного тока состоят из индуктора и якоря, разделенных воздушным зазором.
Индуктор (статор) электродвигателя постоянного тока служит для создания неподвижного магнитного поля машины и состоит из станины, главных и добавочных полюсов. Станина служит для крепления основных и добавочных полюсов и является элементом магнитной цепи машины. На главных полюсах расположены обмотки возбуждения, предназначенные для создания магнитного поля машины, на добавочных полюсах — специальная обмотка, служащая для улучшения условий коммутации.
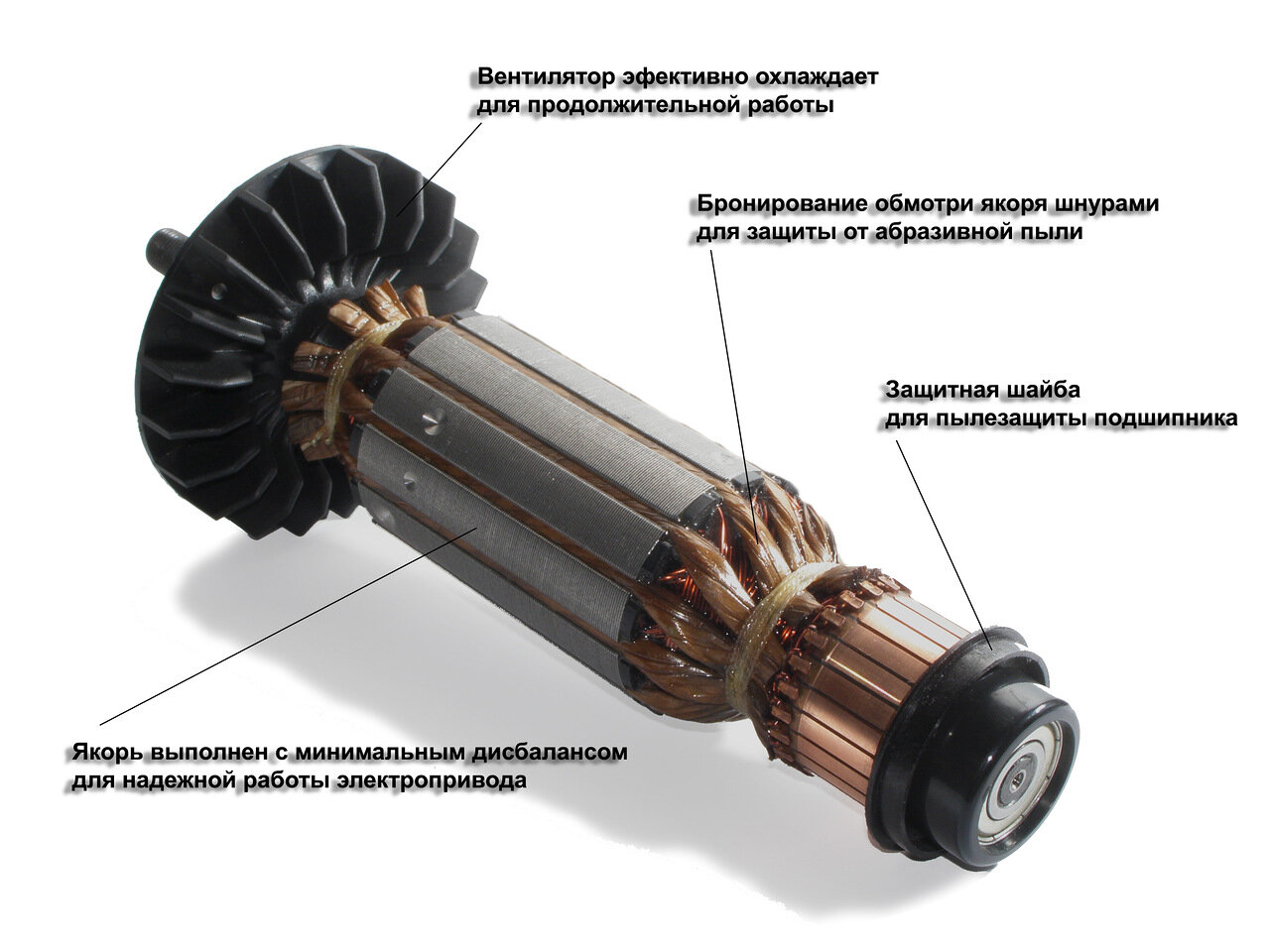
Якорь электродвигателя постоянного тока состоит из магнитной системы, собранной из отдельных листов, рабочей обмотки, уложенной в пазы, и коллектора служащего для подвода к рабочей обмотке постоянноготока.
Коллектор представляет собой цилиндр, насаженный на вал двигателя и избранный из изолированных друг от друга медных пластин. На коллекторе имеются выступы-петушки, к которым припаяны концы секций обмотки якоря. Съем тока с коллектора осуществляется с помощью щеток, обеспечивающих скользящий контакт с коллектором. Щетки закреплены в щеткодержателях, которые удерживают их в определенном положении и обеспечивают необходимое нажатие щетки на поверхность коллектора. Щетки и щеткодержатели закреплены на траверсе, связанной с корпусомэлектродвигателя.
Коллекторный движок он очень хорош. Он чертовски легко и гибко регулируется. Можно повышать обороты, понижать, механическая характеристика жесткая, момент он держит на ура. Зависимость прямая. Ну сказка, а не мотор. Если бы не одна ложка дегтя во всей этой вкусняшке — коллектор.
Это сложный, дорогой и очень ненадежный узел. Он искрит, создает помехи, забивается проводящей пылью от щеток. А при большой нагрузке может полыхнуть, образовав круговой огонь и тогда все, капец движку. Закоротит все дугой наглухо.
Но что такое коллектор вообще? Нафига он нужен? Выше я говорил, что коллектор это механический инвертор. Его задача переключать напряжение якоря туда сюда, подставляя обмотку под поток.
Коллектор в электрических машинах выполняет роль выпрямителя переменного тока в постоянный (в генераторах) и роль автоматического переключателя направления тока во вращающихся проводниках якоря (в двигателях).
Когда магнитное поле пересекается только двумя проводниками, образующими рамку, коллектор будет представлять собой одно кольцо, разрезанное на две части, изолированные одна от другой. В общем случае каждое полукольцо носит название коллекторной пластины.
Начало и конец рамки присоединяются каждый к своей коллекторной пластине. Щетки располагаются таким образом, чтобы одна из них была всегда соединена с проводником, который будет двигаться у северного полюса, а другая — с проводником, который будет двигаться у южного полюса.
Рис. 2. Упрощенное изображения коллектора
Рис. 3. Выпрямление переменного тока с помощью коллектора
Сообщим рамке вращательное движение в направлении по часовой стрелке. В момент, когда вращающаяся рамка займет положение, изображенное на рис. 3, А, в ее проводниках будет индуктироваться наибольший по величине ток, так как проводники пересекают магнитные силовые линии, двигаясь перпендикулярно к ним.
Индуктированный ток из проводника В, соединенного с коллекторной пластиной 2, поступит на щетку 4 и, пройдя внешнюю цепь, через щетку 3 возвратится в проводник А. При этом правая щетка будет положительной, а левая отрицательной.
Дальнейший поворот рамки (положение В) приведет снова к индуктированию тока в обоих проводниках; однако направление тока в проводниках будет противоположно тому, которое они имели в положении А. Так как вместе с проводниками повернутся и коллекторные пластины, то щетка 4 снова будет отдавать электрический ток во внешнюю цепь, а по щетке 3 ток будет возвращаться в рамку.
Отсюда следует, что, несмотря на изменение направления тока в самих вращающихся проводниках, благодаря переключению, произведенному коллектором, направление тока во внешней цепи не изменилось.
В следующий момент (положение Г), когда рамка вторично займет положение на нейтральной линии, в проводниках и, следовательно, во внешней цепи тока опять не будет.
В последующие моменты времени рассмотренный цикл движений будет повторяться в том же порядке. Таким образом, направление индуктированного направление тока во внешней цепи благодаря коллектору все время будет оставаться одним и тем же, а вместе с этим сохранится и полярность щеток.
Щёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе и переключения тока в обмотках ротора. Щётка — неподвижный контакт (обычно графитовый или медно-графитовый). Щётки с большой частотой размыкают и замыкают пластины-контакты коллектора ротора. Как следствие, при работе ДПТ происходят переходные процессы, в обмотках ротора. Эти процессы приводят к искрению на коллекторе, что значительно снижает надёжность ДПТ. Для уменьшения искрения применяются различные способы, основным из которых является установка добавочных полюсов. При больших токах, в роторе ДПТ возникают мощные переходные процессы, в результате чего, искрение может постоянно охватывать все пластины коллектора, независимо от положения щёток. Данное явление называется кольцевым искрением коллектора или «круговой огонь». Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора не допустим. При проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем.Конструкция двигателя может иметь один или несколько щеточно-коллекторных узлов.
А на дворе то уже 21 век и дешевые и мощные полупроводники сейчас на каждом шагу. Так зачем нам нужен механический инвертор если мы можем сделать его электронным? Правильно, незачем! Так что берем и заменяем коллектор силовыми ключами, а еще добавляем датчики положения ротора, чтобы знать в какой момент переключать обмотки.
А для пущего удобства выворачиваем двигатель наизнанку — гораздо проще вращать магнит или простенькую обмотку возбуждения, чем якорь со всей этой тряхомудией на борту. В качестве ротора тут выступает либо мощный постоянный магнит, либо обмотка питаемая с контактных колец. Что хоть и смахивает на коллектор, но не в пример надежней его.
И получаем что? Правильно! Бесщеточный двигатель постоянного тока aka BLDC. Все те же няшные и удобные характеристики ДПТ, но без этого мерзкого коллектора. И не надо путать BLDC с синхронными двигателями. Это совсем разные машины и разным принципом действия и управления, хотя конструктивно они ОЧЕНЬ схожи и тот же синхронник вполне может работать как BLDC, добавить ему только датчиков да систему управления. Но это уже совсем другая история. ВОТ ТУТ можно прочитать про него подробнее.
Продолжая тему двигателя постоянного тока нужно отметить, что принцип действия электродвигателя основывается на инвертировании постоянного тока в якорной цепи, чтобы не было торможения, и вращение ротора поддерживалось в постоянном ритме. Если изменить направление тока в возбуждающей обмотке статора, то, согласно правилу левой руки, изменится направление вращения ротора. То же самое произойдёт, если мы поменяем местами щёточные контакты, подводящие питание от источника к якорной обмотке. А вот если поменять «+» «-» и там и там, то направление вращения вала не изменится. Поэтому, в принципе, для питания такого мотора можно использовать и переменный ток, т.к. ток в индукторе и якоре будет меняться одновременно. На практике такие устройства используются редко.
Думаю многие из вас кто баловался с движками могли заметить, что у них есть ярко выраженный пусковой ток, когда мотор на старте может рвануть стрелку амперметра, например, до ампера, а после разгона ток падает до каких-нибудь 200мА.
Почему это происходит? Это работает противоэдс. Когда двигатель стоит, то ток который через него может пройти зависит только лишь от двух параметров — напряжения питания и сопротивления якорной обмотки. Так что предельный ток который может развить движок и на который следует рассчитывать схему узнать несложно. Достаточно замерить сопротивление обмотки двигателя и поделить на это значение напряжение питания. Просто по закону Ома. Это и будет максимальный ток, пусковой.
Но по мере разгона начинается забавная вещь, обмотка якоря движется поперек магнитного поля статора и в ней наводится ЭДС, как в генераторе, но направлена она встречно той, что вращает двигатель. И в результате, ток через якорь резко снижается, тем больше, чем выше скорость.
А если движок дополнительно еще подкручивать по ходу, то противоэдс будет выше питания и движок начнет вкачивать энергию в систему, став генератором.
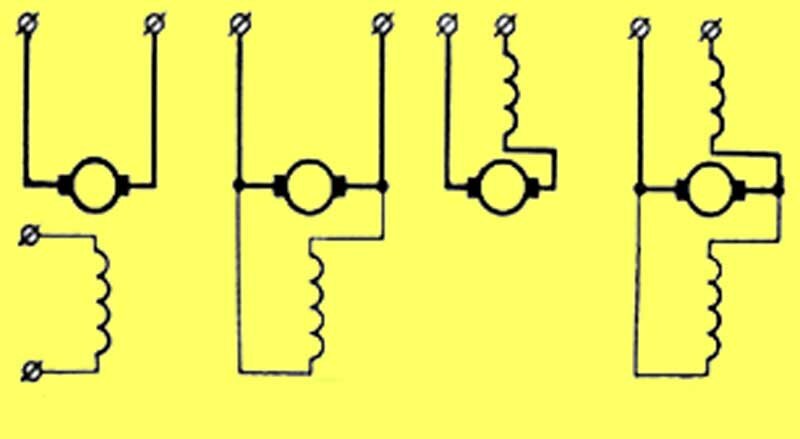
Что касается электрической схемы включения двигателя, то их несколько и они показаны на рисунке. При параллельном соединении обмоток, обмотка якоря делается из большого количества витков тонкой проволоки. При таком подключении коммутируемый коллектором ток будет значительно меньше из-за большого сопротивления и пластины не будут сильно искрить и выгорать. Если делать последовательное соединение обмоток индуктора и якоря, то обмотка индуктора делается из провода большего диаметра с меньшим количеством витков, т.к. весь якорный ток устремляется через статорную обмотку. При таких манипуляциях с пропорциональным изменением значений тока и количества витков, намагничивающая сила остаётся постоянной, а качественные характеристики устройства становятся лучше.
На сегодняшний день двигатели постоянного тока мало используются на производстве. Из недостатков этого типа электрических машин можно отметить быстрый износ щёточно-коллекторного узла. Преимущества – хорошие характеристики запуска, лёгкая регулировка частоты и направления вращения, простота устройства и управления.
В настоящее время двигатели постоянного тока независимого возбуждения, управляемые тиристорными преобразователями, используются в промышленных электроприводах.’Эти приводы обеспечивают регулирование скорости в широком диапазоне. Регулирование скорости вниз от номинальной осуществляется изменением напряжения на якоре, а вверх — ослаблением потока возбуждения. Ограничения, по мощности и скорости обусловлены свойствами используемых двигателей, а не полупроводниковых приборов. Тиристоры могут соединяться последовательно или параллельно, если они имеют недостаточно высокий. класс по напряжению или току. Ток якоря и момент ограничены перегрузочной способностью двигателя по нагреву.
Принцип работы:
Сборка двигателя постоянного тока ПО ДЕТАЛЯМ:
Для любопытных могу еще подробно рассказать про Миф о торсионном генераторе или например что такое Золотое сечение и симметрия. Ну и совсем для жаждущих — подробно про Термоядерный реактор ITER. Оригинал статьи находится на сайте ИнфоГлаз.рф Ссылка на статью, с которой сделана эта копия — http://infoglaz.ru/?p=32677
Подавляющее большинство электроприводов нашего времени использует энергию переменного тока в асинхронном режиме. Тем не менее, двигатель постоянного тока, устройство и принцип действия которого будут рассматривать в этой статье, востребован ничуть не меньше. Что он собой представляет, какие существуют теоретические и технические особенности его эксплуатации, постараемся разобраться далее.
Что такое постоянный ток и чем он отличается от переменного?
Начать рассмотрение вопроса работы эл. двигателей необходимо с того, на чем она базируется, то есть с определения понятия «электрический ток» и его основных видов. Еще со школы нам должно быть известно, что в физике электрическим током называют направленное движение заряженных частиц (электронов или ионов). Его разделение на постоянный и переменный происходит в зависимости от величины и направления тока в некотором промежутке времени. Это хорошо видно на следующем графике:
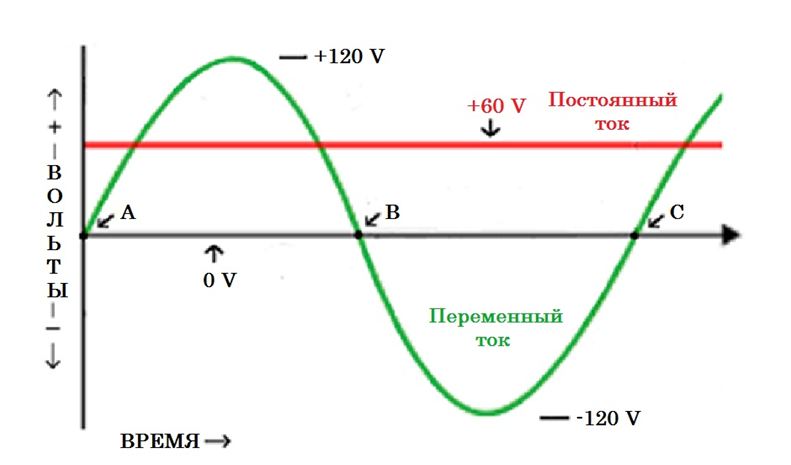
Как видим, график (красная линия) не меняется по времени, напряжение остается стабильным. В то же время, переменный ток (зеленый график) имеет форму синусоиды, постоянно меняя свое значение и направление со временем. Периодичность, с которой график проходит через одинаковые точки по ординате называется частотой и ее стандартное значение 50 Гц.
На самом деле, практически любой бытовой прибор, электроинструмент использует постоянный ток, который преобразовывается из переменного (сетевого). Может возникнуть закономерный вопрос, а для чего тогда использовать синусоидальный ток? Дело в том, что такая форма задания тока позволяет легко преобразовывать напряжение, идущее от генератора электростанции с 200-300 тысяч Вольт до привычных 220, с учетом коэффициента эффективности.
Принцип действия электродвигателя
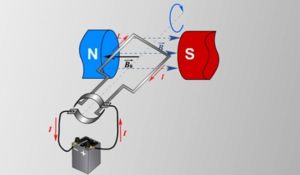 Работа любого эл. двигателя пост. тока базируется на принципе взаимного действия магнитных полей статора и ротора. Здесь также нужно вспомнить базовую физику и историю с рамкой, вращающейся в однородном магнитном поле. Задание предполагает подачу на нее тока, индуцирующего собственное круговое магнитное поле. При взаимодействии с предыдущим формирует направленную перпендикулярно силу Ампера. Она выталкивает рамку из однородного поля.
Работа любого эл. двигателя пост. тока базируется на принципе взаимного действия магнитных полей статора и ротора. Здесь также нужно вспомнить базовую физику и историю с рамкой, вращающейся в однородном магнитном поле. Задание предполагает подачу на нее тока, индуцирующего собственное круговое магнитное поле. При взаимодействии с предыдущим формирует направленную перпендикулярно силу Ампера. Она выталкивает рамку из однородного поля.
В нашем случае, принцип действия тот же, но роль неподвижного однородного магнитного поля играет статор, а рамки – вращающийся ротор электродвигателя, обмотками, который еще называется якорем.
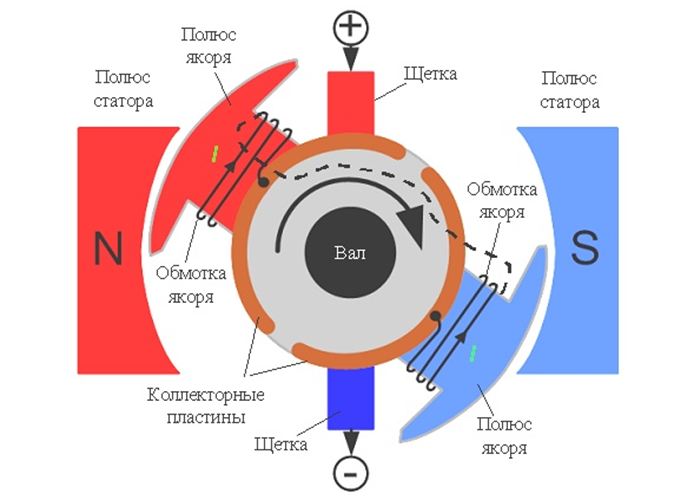
Как видим, два полюса статора создают однородное магнитное поле. Обмотка ротора состоит из двух частей, которые наматываются на его полюсах и соединены между собой последовательно. Концы обмоток замыкаются на разделенных, расположенных на валу электродвигателя коллекторных пластинах. Они имеют физический контакт (трение) с неподвижными щетками из графита, на которые подается пост. ток. Если при подключении соблюсти принцип расположение полюсов тока, как показано на рисунке, то полюс якоря, расположенный на схеме слева, станет условно северным, как и находящийся в непосредственной близости полюс статора электродвигателя.
Естественная реакция на действие магнитных сил заключается в том, что равнозначные полюса отталкиваются. В нашем случае такое возможно только за счет вращения. По инерции, северный полюс якоря, провернувшись на 180º станет напротив южного полюса статора. По логике вещей они должны начать притягиваться, что приведет к торможению. Чтобы этого не допустить, в момент перехода нейтральной линии коллектор переключает обмотки якоря местами, чтобы вновь организовать отторжение полюсов.
Учитывая эту информацию устройство двигателя постоянного тока можно изобразить следующим образом:
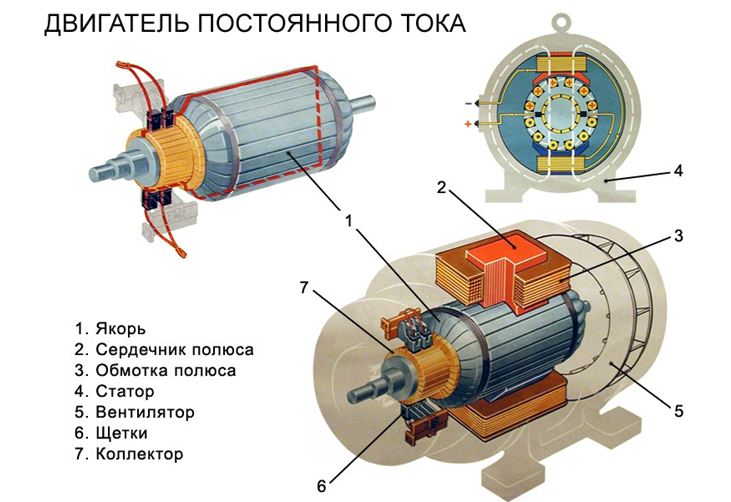
Характеристики эл. двигателя
Любой электродвигатель – это оборудование, которым можно и нужно управлять в зависимости от требуемых условий. Регулирование происходит одним из трех основных способов/принципов:
- Изменение напряжения, которое подается на обмотки ротора,
- Ввод в цепь дополнительного сопротивления,
- Изменения возбуждения (величины потока).
Работа эл. двигателя оценивается по графикам характеристик, которые бывают:
- Механическими. Представляют собой зависимость частоты/скорости вращения от момента на валу с учетом поправочного коэффициента,
- Регулировочными. Зависимость частоты вращения от напряжения в цепи питания обмоток якоря, сопротивления или потока.
На графике механической характеристики откладываются значения частоты вращения (ось ординат) и момента (ось абсцисс). По форме она представляет прямую с отрицательным уклоном. Построение графика происходит для определенной величины напряжения. Базовым уравнением механической характеристики является:

где ω – скорость вращения якоря, U – напряжение якорной цепи, К – конструктивный коэффициент, Ф – значение потока, RЯ – активное сопротивление якорной обмотки, М – электромагнитный момент электродвигателя.
В отличие от нее, график регулировочной характеристики строится для определенного момента на валу (ось абсцисс). На оси ординат по-прежнему находится частота. Для каждого из видов регулирования электродвигателя, уравнение будет иметь отдельную форму:
- Уравнение при регулировании напряжением:

- Уравнение при реостатном регулировании (сопротивлением):

- Уравнение при потоковом регулировании:

Сравнительный вид графиков представлен ниже:
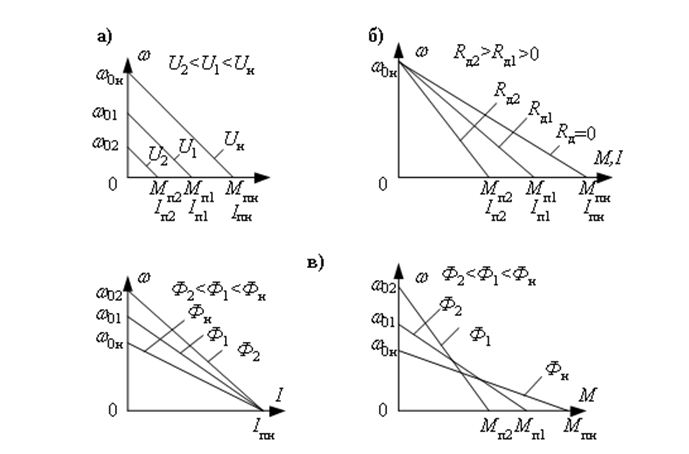
Также следует напомнить, что механические характеристики могут быть естественными (снятые при номинальном режиме) или искусственными (получаются при изменении напряжения, сопротивления или потока).
Режимы работы эл. двигателей
Используя уже известный нам график для характеристик, но расширив его на четыре квадранта, можно оценить существующие режимы работы оборудования.
Нумерация квадрантов происходит против часовой стрелки, начиная с правого верхнего, в котором координаты по обеим осям идут со знаком «+». Как видно из графика, в первом и третьем квадрантах наблюдается двигательный режим, для которого мощность Р = М·ω >, 0. В двух других квадрантах реализуется режим генератора или тормозной, имеющий отрицательное значение мощности.
Как видим, график образует несколько характерных точек и зон, ответственных за отдельные режимы:
- Холостой ход. Образуется в точке ωо. В этом случае ток и момент равны нулю, а сам эл. двигатель не получает энергии,
- Генератор при параллельном подключении. Называется еще тормозным с рекуперацией в сеть. Реализуется при ω >, ωо и E >, U. Эл. двигатель получает механическую энергию от работающего оборудования, а в сеть взамен отдается электрическая (генератор тока),
- Короткое замыкание. В этом случае ω = 0 и Е = 0. Механическая энергия от вращения вала не отдается, а электрическая превращается в тепловую,
- Генератор при последовательном соединении. Этот режим еще называется торможением с противовключением. При этом ω <, 0, а ток и ЭДС имеют одинаковое направление. Выработка электричества происходит за счет вращения оборудования, совмещенного с валом ротора,
- Автономный генератор. Режим динамического торможения предполагает выработку электричества за счет одной лишь механической энергии вращения вала от привода, без участия сети.
Технические и энергетические параметры функционирования двигателей постоянного тока позволяют с большой эффективностью использовать их в разных сферах, от машиностроения до легкой промышленности и даже игрушек. Они могут действовать в чисто двигательном или режиме генератора (тормозном), используя различные коэффициенты.
Матовый двигатель постоянного тока
Дмитрий Левкин
Матовый электродвигатель постоянного тока представляет собой вращающуюся электрическую машину постоянного тока, которая преобразует электрическую энергию постоянного тока в механическую энергию, в которой по меньшей мере одна из обмоток, участвующих в основном процессе преобразования энергии, соединена с коммутатором.Рисунок 1 — Двигатель постоянного тока с постоянными магнитами в секции
Ротор является вращающейся частью электрической машины.
Статор является неподвижной частью двигателя.
Индуктор (система возбуждения) является частью коммутационной машины постоянного тока или синхронной машины, создающей магнитный поток для формирования крутящего момента. Индуктор включает в себя либо постоянных магнитов , либо полевую обмотку . Индуктор может быть частью как ротора, так и статора. В двигателе, показанном на рис. 1, система возбуждения состоит из двух постоянных магнитов и является частью статора.
Якорь является частью коммутационной машины постоянного тока или синхронной машины, в которой индуцируется электродвижущая сила и протекает ток нагрузки [2]. В качестве якоря могут выступать как ротор, так и статор. В двигателе, показанном на рис. 1, ротор является арматурой.
Щетки — это часть электрической цепи, через которую электрический ток передается от источника питания к якорю. Щетки сделаны из графита или других материалов. Двигатель постоянного тока содержит одну пару щеток или более.Одна из двух щеток соединена с положительной, а другая с отрицательной клеммой источника питания.
Коммутатор является частью двигателя, контактирующей с щетками. С помощью щеток и коммутатора электрический ток распределяется по катушкам обмотки якоря [1].
Согласно конструкции статора, щеточный двигатель может быть с постоянными магнитами и с намотанным статором.
Двигатель постоянного тока с постоянным магнитом
постоянный магнит двигателя постоянного тока схема
Двигатель постоянного тока с постоянными магнитами (двигатель PMDC) является наиболее распространенным среди щеточных двигателей постоянного тока.Индуктор этого двигателя содержит постоянные магниты, которые создают магнитное поле статора. Двигатели постоянного тока с постоянными магнитами обычно используются в задачах, которые не требуют большой мощности. Двигатели с постоянным током дешевле в производстве, чем двигатели постоянного тока. В то же время крутящий момент двигателя PMDC ограничен полем постоянных магнитов статора. Двигатель PMDC очень быстро реагирует на изменения напряжения. Благодаря постоянному полю статора, скорость двигателя легко контролировать.Недостаток двигателя с постоянным магнитом постоянного тока состоит в том, что со временем магниты теряют свои магнитные свойства, в результате чего поле статора уменьшается, а производительность двигателя уменьшается.
- Преимущество:
- лучшее соотношение цена / качество
- высокий крутящий момент на низкой скорости
- быстрый отклик напряжения
- Недостаток:
Постоянные магниты
- со временем, а также под воздействием высоких температур теряют свои магнитные свойства
Двигатель постоянного тока с обмоткой
Отдельно возбуждаемая схема двигателя постоянного тока
Шунтная обмотка двигателя постоянного тока по схеме
Серия мотальных двигателей постоянного тока по схеме
Составная обмотка двигателя постоянного тока по схеме
Двигатели с раздельным возбуждением и шунтированием
В электродвигателях с отдельным возбуждением обмотка возбуждения электрически не соединена с обмоткой якоря (рисунок выше).Обычно напряжение возбуждения U FW отличается от напряжения в цепи якоря U. Если напряжения равны, то обмотка возбуждения подключается параллельно с обмоткой якоря. Использование в электроприводе отдельно возбужденного или шунтирующего двигателя определяется схемой электропривода. Свойства (характеристики) этих двигателей одинаковы [3].
В двигателях постоянного тока с обмоткой с шунтовой обмоткой токи обмотки возбуждения (катушки индуктивности) и якоря не зависят друг от друга, а общий ток двигателя равен сумме тока обмотки возбуждения и тока якоря.При нормальной работе увеличение напряжения питания увеличивает общий ток двигателя, что приводит к увеличению полей статора и ротора. С увеличением общего тока двигателя скорость также увеличивается, а крутящий момент уменьшается. Когда нагрузка двигателя увеличилась , ток якоря увеличивается, в результате чего поле якоря увеличивается. При увеличении тока якоря ток катушки индуктивности (обмотки возбуждения) уменьшается, что приводит к уменьшению поля индуктивности, что приводит к уменьшению скорости двигателя и увеличению крутящего момента.
- Преимущество:
- почти постоянный крутящий момент на низкой скорости
- хорошие регулировочные свойства
- без потери магнетизма с течением времени (так как нет постоянных магнитов)
- Недостаток:
- дороже, чем двигатель PMDC
- двигатель выходит из-под контроля, если ток индуктора падает до нуля
Шунтирующий двигатель постоянного тока имеет характеристику крутящего момента / скорости с уменьшающимся крутящим моментом на высоких скоростях и высоким, но более постоянным крутящим моментом на низких скоростях.Ток в обмотке индуктора и якоря не зависит друг от друга, поэтому суммарный ток электродвигателя равен сумме токов индуктора и якоря. В результате этот тип двигателя имеет отличные характеристики управления скоростью. Щеточный двигатель постоянного тока с намоткой обычно используется в приложениях, требующих мощность более 3 кВт, в частности, в автомобильной промышленности и промышленности. По сравнению с двигателем с постоянным током двигатель постоянного тока с шунтирующим витком не теряет своих магнитных свойств со временем и является более надежным.Недостатками шунтирующего намотанного щеточного двигателя постоянного тока являются более высокая стоимость и возможность разгона двигателя при снижении тока индуктора до нуля, что, в свою очередь, может привести к выходу двигателя из строя [5].
Двигатель постоянного тока серииВ последовательно намотанных щеточных двигателях постоянного тока обмотка возбуждения соединена последовательно с обмоткой якоря, а ток возбуждения равен току якоря (I e = I a ), что придает двигателям особые свойства. При малых нагрузках, когда ток якоря меньше номинального тока (I a & lt I крыса ) и магнитная система двигателя не насыщена (Ф ~ I а ), электромагнитный момент пропорционален площадь тока в обмотке якоря:
,
- , где M — крутящий момент двигателя, Н ∙ м,
- с М — постоянный коэффициент, определяемый конструктивными параметрами двигателя ,,
- Ф — основной магнитный поток, Wb,
- I a — ток якоря, А.
С увеличением нагрузки магнитная система двигателя насыщается, и пропорциональность между током I a и магнитным потоком Ф нарушается. При значительном насыщении магнитный поток Ф с увеличением I и практически не увеличивается. График зависимости M = f (I a ) в начальной части (когда магнитная система не насыщена) имеет форму параболы, затем при насыщении отклоняется от параболы и в области больших нагрузок превращается в прямую линию [3].
Характеристика характеристик последовательно намотанного двигателя постоянного тока
Электромеханическая характеристика последовательно намотанного двигателя постоянного тока
Важно: Недопустимо включать последовательно подключенный намотанный щеточный двигатель постоянного тока в электрическую сеть на холостом ходу (без нагрузки на вал) или с нагрузкой менее 25% от номинальной, так как при низких нагрузках скорость якоря увеличивается значительно, достигая значений, при которых возможно механическое повреждение двигателя, поэтому в приводах с последовательно намотанными двигателями постоянного тока недопустимо использовать ременную передачу, если она сломана, двигатель переходит в режим холостого хода.Исключение составляют двигатели постоянного тока с последовательной намоткой мощностью до 100–200 Вт, которые могут работать в режиме холостого хода, поскольку их механические и магнитные потери на высоких скоростях соизмеримы с номинальной мощностью двигателя.
Способность электродвигателей постоянного тока с последовательной намоткой развивать большой электромагнитный момент обеспечивает им хорошие пусковые свойства.
- Преимущество:
- высокий крутящий момент на низкой скорости
- без потери магнетизма со временем
- Недостаток:
- низкий крутящий момент на высокой скорости
- дороже, чем двигатель PMDC
- плохое управление скоростью из-за последовательного соединения якоря и обмотки индуктора
- двигатель выходит из-под контроля, если ток индуктора падает до нуля
с намоткой имеет высокий крутящий момент на низкой скорости и развивает высокую скорость без нагрузки.Этот электродвигатель идеально подходит для устройств, которые должны развивать высокий крутящий момент (краны и лебедки), так как ток статора и ротора увеличивается под нагрузкой. В отличие от двигателей с постоянным током и двигателей с постоянным наматыванием постоянного тока, двигатели постоянного тока с последовательной намоткой не имеют точных характеристик управления скоростью, и в случае короткого замыкания обмотки возбуждения могут стать неуправляемыми.
Составной двигатель постоянного тока
Электродвигатель постоянного тока со сложной намоткой имеет две обмотки возбуждения, одна из которых подключена параллельно обмотке якоря, а вторая — последовательно.Соотношение между силами намагничивания обмоток может быть различным, но обычно одна из обмоток создает большую силу намагничивания, и эта обмотка называется основной, вторая обмотка называется вспомогательной. Если обмотки подключены таким образом, что последовательное поле помогает шунтирующему полю, то этот двигатель называется Совмещенный составной щеточный двигатель постоянного тока . С другой стороны, если обмотки соединены таким образом, что два поля противостоят друг другу, тогда двигатель называется дифференциальным щеточным электродвигателем постоянного тока с дифференциальной компоновкой.Скоростные характеристики накопительного составного щеточного двигателя постоянного тока расположены между скоростными характеристиками шунтирующих и последовательных намотанных двигателей постоянного тока. Противоположное соединение обмоток (дифференциальная рецептура) используется, когда необходимо получить постоянную скорость вращения или увеличение скорости вращения с увеличением нагрузки. Таким образом, рабочие характеристики двигателя постоянного тока со сложной намоткой близки к характеристикам двигателя постоянного тока с шунтирующей или последовательной намоткой, в зависимости от того, какая обмотка возбуждения играет основную роль [4].
- Преимущество:
- хорошее управление скоростью
- высокий крутящий момент на низкой скорости
- разгона двигателя менее вероятно
- без потери магнетизма со временем
- Недостаток:
- дороже, чем другие щеточные моторы постоянного тока
Составные щеточные двигатели постоянного тока имеют рабочие характеристики шунтовых и последовательно намотанных щеточных двигателей постоянного тока.Он имеет высокий крутящий момент на низкой скорости, а также последовательный намотанный щеточный двигатель постоянного тока и хороший контроль скорости, как, например, шунтирующий намотанный щеточный двигатель постоянного тока. Ускорение двигателя постоянного тока со щетками со сложной намоткой менее вероятно, поскольку ток шунта должен уменьшиться до нуля, а обмотка последовательного поля должна быть замкнута накоротко.
Рабочие характеристики щеточных двигателей постоянного тока определяются их рабочими, электромеханическими и механическими характеристиками, а также их регулировочными свойствами.
Кривые крутящего момента щеточных двигателей постоянного тока
постоянная крутящего момента
Для щеточного двигателя постоянного тока постоянная крутящего момента определяется по формуле:
,
- где Z — общее количество проводников,
- Ф — магнитный поток, Wb [1]
Также прочитайте
,Синхронный электродвигатель с питанием от инвертора

Мотор с 3,5-дюймовым дисководом. Катушки, расположенные радиально, изготовлены из медной проволоки, покрытой синей изоляцией. Ротор (вверху справа) был снят и перевернут. Серое кольцо внутри чашки — это постоянный магнит. Этот конкретный двигатель является с опережением , со статором внутри ротора.
 Бесщеточный канальный вентилятор постоянного тока. Две катушки на печатной плате взаимодействуют с шестью круглыми постоянными магнитами в блоке вентилятора.
Бесщеточный канальный вентилятор постоянного тока. Две катушки на печатной плате взаимодействуют с шестью круглыми постоянными магнитами в блоке вентилятора.
Бесщеточный электродвигатель постоянного тока (двигатель BLDC или BL двигатель ), также известный как электродвигатель с электронной коммутацией ( ECM или EC двигатель ) и синхронный двигатель постоянного тока , являются синхронными двигателями с питанием от электричество постоянного тока (постоянного тока) через инвертор или импульсный источник питания, который вырабатывает электричество в форме переменного тока (переменного тока) для управления каждой фазой двигателя через контроллер с обратной связью.Контроллер подает импульсы тока на обмотки двигателя, которые контролируют скорость и крутящий момент двигателя.
Конструкция системы бесщеточного двигателя, как правило, аналогична синхронному двигателю с постоянными магнитами (PMSM), но также может быть переключаемым реактивным двигателем или асинхронным (асинхронным) двигателем. Они могут также использовать неодимовые магниты и быть обгоняющими (статор окружен ротором), внутренними обмотками (ротор окружен статором) или осевыми (ротор и статор плоские и параллельные). [1]
Преимущества бесщеточного двигателя перед щеточными двигателями — это высокое соотношение мощности и веса, высокая скорость, электронное управление и низкие эксплуатационные расходы. Бесщеточные двигатели находят применение в таких местах, как компьютерная периферия (дисководы, принтеры), ручные электроинструменты и транспортные средства, от модельных самолетов до автомобилей. В современных стиральных машинах используются бесщеточные двигатели постоянного тока, которые заменили резиновые ремни и коробки передач на гораздо более простую и надежную конструкцию с прямым приводом.
Энциклопедия YouTube
-
1/5
Просмотров:2 151 291
1 310 910
267 260
709 308
808 774
-
Motor Бесщеточный двигатель постоянного тока, как это работает?
-
explained Бесщеточные двигатели постоянного тока и щеточные двигатели постоянного тока объяснены — BLDC Fan (2)
-
✪ 600 Вт, 3d-печать, Halbach Array, бесщеточный электродвигатель постоянного тока
-
✪ Основы электроники № 18: двигатель постоянного тока и бесщеточный двигатель постоянного тока + ESC
-
✪ Бесщеточные двигатели постоянного тока и управление — как это работает (часть 1 из 2)
Содержание
Бесщеточный противпочищенные моторы
щеточных двигателей постоянного тока были изобретены в 19 веке и являются распространенными. Бесщеточные двигатели постоянного тока стали возможными благодаря развитию твердотельной электроники в 1960-х годах. [2]
Электродвигатель развивает крутящий момент путем изменения полярности вращающихся магнитов, прикрепленных к ротору, вращающейся части машины, и неподвижных магнитов на статоре, который окружает ротор. [3] Один или оба комплекта магнитов представляют собой электромагниты, изготовленные из катушки из проволоки, намотанной вокруг железного сердечника.Постоянный ток, проходящий через обмотку провода, создает магнитное поле, обеспечивающее мощность, которая запускает двигатель. Однако каждый раз, когда ротор вращается на 180 ° (на пол-оборота), положение северного и южного полюсов на роторе меняется на противоположное. Если бы магнитное поле полюсов оставалось неизменным, это вызывало бы изменение крутящего момента на роторе каждые пол оборота, и поэтому средний крутящий момент был бы нулевым, а ротор не вращался. [4] [5] Таким образом, в двигателе постоянного тока для создания крутящего момента в одном направлении направление электрического тока через обмотки должно быть обращено с каждым поворотом ротора на 180 ° (или выключаться во время вращения). время, когда это в неправильном направлении).Это меняет направление магнитного поля при вращении ротора, поэтому крутящий момент на роторе всегда одинаковый.
Коммутатор
В щеточных двигателях, изобретенных в 19 веке, это делается с помощью поворотного переключателя на валу двигателя, называемого коммутатором. [3] [5] [4] Он состоит из вращающегося цилиндра, разделенного на несколько металлических контактных сегментов на роторе. Сегменты соединены с обмотками проводника на роторе.Два или более неподвижных контакта, называемых «щетками», изготовленных из мягкого проводника, такого как графит, прижимаются к коммутатору, создавая скользящий электрический контакт с последовательными сегментами при повороте ротора, обеспечивая электрический ток для обмоток. Каждый раз, когда ротор вращается на 180 °, коммутатор меняет направление электрического тока, приложенного к данной обмотке, в обратном направлении, поэтому магнитное поле создает крутящий момент в одном направлении.
Недостатки коммутатора
Коммутатор имеет много технических недостатков, что привело к снижению использования щеточных двигателей.Эти недостатки: [3] [5] [4]
- Трение щеток, скользящих вдоль вращающихся сегментов коммутатора, вызывает потери мощности, которые могут быть значительными в двигателе малой мощности.
- Мягкий материал щетки изнашивается из-за трения, создавая пыль, и в конечном итоге щетки необходимо заменить. Это делает коммутируемые двигатели непригодными для применений с малыми частицами или в герметичных условиях, таких как двигатели с жестким диском, и для применений, требующих работы без технического обслуживания.
- Сопротивление скользящего контакта щетки вызывает падение напряжения в цепи двигателя, называемое , падение щетки , которое потребляет энергию.
- Многократное резкое переключение тока через индуктивность обмоток вызывает искры на контактах коммутатора, которые представляют опасность пожара во взрывоопасных средах, источник деградирующего ультрафиолетового излучения, шум, который может вызвать электромагнитные помехи в соседних микроэлектронных цепях.
В течение последних ста лет мощные щеточные двигатели постоянного тока, которые когда-то были основой промышленности, были заменены синхронными двигателями переменного тока. В настоящее время щеточные двигатели используются только в приложениях с низким энергопотреблением или там, где доступен только постоянный ток, но вышеуказанные недостатки ограничивают их использование даже в этих приложениях. Бесщеточные моторы были изобретены для решения этих проблем. [ цитирование необходимо ]
Бесщеточный раствор
Развитие полупроводниковой электроники в 1970-х годах позволило исключить коммутатор в двигателях постоянного тока, а также щетки в двигателях с постоянными магнитами.В бесщеточных двигателях постоянного тока электронная сервосистема заменяет контакты механического коммутатора. [3] [5] [4] Электронный датчик определяет угол ротора и управляет полупроводниковыми переключателями, такими как транзисторы, которые переключают ток через обмотки, либо изменяя направление тока, либо в некоторых двигателях выключая его, в нужное время каждое вращение вала на 180 °, чтобы электромагниты создавали крутящий момент в одном направлении. Исключение скользящего контакта позволяет бесщеточным двигателям иметь меньшее трение и увеличить срок службы; срок их службы ограничен сроком службы подшипников.
Моторы постоянного тока с щеткой развивают максимальный крутящий момент в неподвижном состоянии, линейно уменьшаясь при увеличении скорости. [6] Некоторые ограничения щеточных двигателей можно преодолеть с помощью бесщеточных двигателей; они включают в себя более высокую эффективность и меньшую подверженность механическому износу. Эти преимущества достигаются за счет потенциально менее надежной, более сложной и более дорогой управляющей электроники.
Типичный бесщеточный двигатель имеет постоянные магниты, которые вращаются вокруг неподвижной арматуры, устраняя проблемы, связанные с подключением тока к движущейся арматуре.Электронный контроллер заменяет узел щетка / коммутатор щеточного двигателя постоянного тока, который непрерывно переключает фазу на обмотки для поддержания вращения двигателя. Контроллер выполняет аналогичное временное распределение мощности, используя твердотельную цепь, а не систему щетка / коммутатор.
Бесщеточные двигатели имеют ряд преимуществ по сравнению с щеточными двигателями постоянного тока, включая высокое отношение крутящего момента к массе, больший крутящий момент на ватт (повышенная эффективность), повышенную надежность, уменьшенный шум, более длительный срок службы (без эрозии щетки и коммутатора), устранение ионизирующих искр от коммутатор и общее снижение электромагнитных помех (EMI).Без обмоток на роторе они не подвергаются центробежным силам, а поскольку обмотки поддерживаются корпусом, они могут охлаждаться за счет теплопроводности, не требуя воздушного потока внутри двигателя для охлаждения. Это, в свою очередь, означает, что внутренние части двигателя могут быть полностью закрыты и защищены от грязи или других посторонних веществ.
Коммутация бесщеточного двигателя может быть реализована в программном обеспечении с использованием микроконтроллера или микропроцессорного компьютера, или альтернативно может быть реализована с использованием аналоговых или цифровых схем.Коммутация с электроникой вместо щеток обеспечивает большую гибкость и возможности, недоступные для щеточных двигателей постоянного тока, в том числе ограничение скорости, «микрошаг» для медленного и точного управления движением и удерживающий момент в неподвижном состоянии. Программное обеспечение контроллера может быть настроено для конкретного двигателя, используемого в приложении, что приводит к большей эффективности коммутации.
Максимальная мощность, которая может быть применена к бесщеточному двигателю, ограничена почти исключительно теплом; [ цитирование необходимо ] слишком большое количество тепла ослабляет магниты и может повредить изоляцию обмоток.
При преобразовании электричества в механическую мощность бесщеточные двигатели более эффективны, чем щеточные. Это улучшение во многом связано с частотой, с которой переключается электричество, определяемой обратной связью датчика положения. Дополнительный выигрыш обусловлен отсутствием щеток, что снижает механическую потерю энергии из-за трения. Повышенная эффективность является наибольшей в области холостого хода и низкой нагрузки на кривой производительности двигателя. [ цитирование необходимо ] При высоких механических нагрузках бесщеточные двигатели и высококачественные щеточные двигатели сопоставимы по эффективности. [ цитирование необходимо ] [ оспаривается — обсудить ]
Условия и требования, в которых производители используют двигатели постоянного тока бесщеточного типа, включают работу без технического обслуживания, высокие скорости и работу, когда искрение опасно (то есть взрывоопасно) или может повлиять на чувствительное к электронике оборудование.
Конструкция бесщеточного двигателя напоминает шаговый двигатель, но двигатели имеют важные различия из-за различий в реализации и эксплуатации.В то время как шаговый двигатель часто останавливается с ротором в определенном угловом положении, бесщеточный двигатель обычно предназначен для непрерывного вращения. Оба типа двигателей могут иметь, но обычно не включают датчик положения ротора для внутренней обратной связи. Как шаговый двигатель, хорошо разработанный бесщеточный двигатель может удерживать конечный крутящий момент при нулевых оборотах.
Реализации контроллеров
Поскольку контроллер реализует функциональность традиционных щеток, ему требуется ориентация / положение ротора (относительно катушек статора).Это происходит автоматически в щеточном двигателе благодаря фиксированной геометрии вала ротора и щеток. В некоторых конструкциях используются датчики эффекта Холла или поворотный датчик для непосредственного измерения положения ротора. Другие измеряют противо-ЭДС в ненарушенных катушках, чтобы вывести положение ротора, устраняя необходимость в отдельных датчиках с эффектом Холла, и поэтому их часто называют контроллерами без датчика .
Типичный контроллер содержит три двунаправленных выхода (то есть трехфазный выход с частотным управлением), которые управляются логической схемой.Простые контроллеры используют компараторы для определения того, когда выходная фаза должна быть усовершенствована, в то время как более продвинутые контроллеры используют микроконтроллер для управления ускорением, скоростью управления и точной настройкой эффективности.
Контроллеры, которые определяют положение ротора на основе противо-ЭДС, сталкиваются с дополнительными трудностями при инициировании движения, поскольку при неподвижном роторе противо-ЭДС не возникает. Обычно это достигается путем начала поворота с произвольной фазы, а затем перехода к правильной фазе, если она окажется неправильной.Это может привести к кратковременному вращению двигателя назад, что еще больше усложнит последовательность запуска. Другие контроллеры без датчиков способны измерять насыщение обмотки, вызванное положением магнитов, определяющих положение ротора.
Два основных рабочих параметра бесщеточных двигателей постоянного тока — это постоянные двигателя К T {\ displaystyle K_ {T}} (постоянная крутящего момента) и К е {\ displaystyle K_ {e}} (постоянная ЭДС, также известная как постоянная скорости К В знак равно 1 К е {\ displaystyle K_ {V} = {1 \ over K_ {e}}} ). [7]
Вариации в строительстве

Схема для намотки треугольной формы. (Это изображение не иллюстрирует индуктивные и генераторные свойства двигателя)
Бесщеточные двигателимогут быть сконструированы в нескольких различных физических конфигурациях: в «обычной» (также известной как inrunner ) конфигурации постоянные магниты являются частью ротора. Три обмотки статора окружают ротор. В конфигурации с опережением (или с внешним ротором) радиальное соотношение между катушками и магнитами меняется на обратное; катушки статора образуют центр (сердечник) двигателя, в то время как постоянные магниты вращаются внутри нависающего ротора, который окружает сердечник.Тип плоского или осевого потока, используемый там, где существуют ограничения по пространству или форме, использует пластины статора и ротора, установленные лицом к лицу. У аутраннеров обычно больше полюсов, триплеты установлены для поддержания трех групп обмоток и имеют более высокий крутящий момент при низких оборотах. Во всех бесщеточных двигателях катушки неподвижны.
Существует две общие конфигурации электрических обмоток; дельта-конфигурация соединяет три обмотки друг с другом (последовательные цепи) в форме треугольника, и питание подается на каждое из соединений.Конфигурация Wye (в форме Y-), которую иногда называют звездообразной обмоткой, соединяет все обмотки с центральной точкой (параллельными цепями), и питание подается на оставшийся конец каждой обмотки.
Двигатель с обмотками в треугольной конфигурации обеспечивает низкий крутящий момент на низкой скорости, но может давать более высокую максимальную скорость. Конфигурация Wye дает высокий крутящий момент на низкой скорости, но не на максимальной скорости.
Хотя конструкция двигателя сильно влияет на эффективность, витая обмотка обычно более эффективна.В обмотках, соединенных треугольником, половину напряжения прикладывают к обмоткам, примыкающим к ведомому выводу (по сравнению с обмоткой непосредственно между ведомыми выводами), увеличивая резистивные потери. Кроме того, обмотки могут позволить высокочастотным паразитным электрическим токам циркулировать полностью внутри двигателя. Обмотка с соединением по краям не содержит замкнутого контура, в котором могут протекать паразитные токи, предотвращая такие потери.
С точки зрения контроллера, два типа обмоток обрабатываются абсолютно одинаково.
Приложения
 Четыре полюса на статоре двухфазного бесщеточного двигателя. Это часть вентилятора охлаждения компьютера; ротор был удален.
Бесщеточные двигатели
Четыре полюса на статоре двухфазного бесщеточного двигателя. Это часть вентилятора охлаждения компьютера; ротор был удален.
Бесщеточные двигатели выполняют многие функции, изначально выполняемые щеточными двигателями постоянного тока, но стоимость и сложность управления не позволяют бесщеточным двигателям полностью заменить щеточные двигатели в областях с наименьшими затратами. Тем не менее, бесщеточные двигатели стали доминировать во многих приложениях, особенно таких устройствах, как компьютерные жесткие диски и CD / DVD-плееры.Малые охлаждающие вентиляторы в электронном оборудовании питаются исключительно от бесщеточных двигателей. Их можно найти в беспроводных электроинструментах, где повышенная эффективность двигателя приводит к более длительным периодам использования, прежде чем батарею необходимо зарядить. Низкоскоростные, маломощные бесщеточные двигатели используются в проигрывателях с прямым приводом для граммофонных пластинок. [ цитирование необходимо ]
Транспорт
Бесщеточные двигатели встречаются в электромобилях, гибридных транспортных средствах и личных транспортных средствах. [ цитирование необходимо ] В большинстве электрических велосипедов используются бесщеточные двигатели, которые иногда встроены в саму ступицу колеса, при этом статор неподвижно прикреплен к оси, а магниты прикреплены к колесу и вращаются вместе с ним. [8] Тот же принцип применяется в самобалансирующихся колесах самоката. Большинство моделей RC с электропитанием используют бесщеточные двигатели из-за их высокой эффективности.
Аккумуляторные инструменты
Бесщеточные двигателииспользуются во многих современных беспроводных инструментах, включая некоторые триммеры для струн, воздуходувки для листьев, пилы (циркулярные или возвратно-поступательные) и дрели / шуруповерты.Преимущества бесщеточных по сравнению с щеточными двигателями (малый вес, высокая эффективность) важнее для ручных инструментов с питанием от батарей, чем для больших стационарных инструментов, подключенных к розетке переменного тока, поэтому в этом сегменте рынка их внедрение было более быстрым.
Отопление и вентиляция
В отраслях отопления, вентиляции и кондиционирования воздуха (HVAC) и холодильной промышленности наблюдается тенденция к использованию бесщеточных двигателей вместо различных типов двигателей переменного тока. Наиболее существенной причиной перехода на бесщеточный двигатель является резкое снижение мощности, необходимой для их работы, по сравнению с обычным двигателем переменного тока. [9] В то время как двигатели с затененными полюсами и постоянными разделенными конденсаторами когда-то доминировали в качестве двигателя вентилятора, многие вентиляторы теперь работают с использованием бесщеточного двигателя. [ когда? ] Некоторые вентиляторы также используют бесщеточные двигатели для повышения общей эффективности системы.
В дополнение к более высокой эффективности бесщеточного двигателя, в системах отопления, вентиляции и кондиционирования воздуха (особенно в системах с переменной скоростью и / или модуляцией нагрузки) используются бесщеточные двигатели, поскольку встроенный микропроцессор обеспечивает программируемость, контроль воздушного потока и последовательную связь.Некоторые потолочные и переносные вентиляторы также оснащены этим двигателем. Они рекламируют двигатель с высокой энергоэффективностью и тише, чем большинство поклонников.
Промышленный инжиниринг
Применение бесщеточных двигателей постоянного тока в промышленном инжиниринге в основном сфокусировано на технологии промышленного проектирования или промышленной автоматизации. В производстве бесщеточные двигатели в основном используются для систем управления движением, позиционирования или приведения в действие.
Бесщеточные двигатели идеально подходят для производственных применений из-за их высокой удельной мощности, хороших скоростных характеристик и крутящего момента, высокой эффективности, широкого диапазона скоростей и низких эксплуатационных расходов.Наиболее распространенные области применения бесщеточных двигателей постоянного тока в промышленном строительстве — это линейные двигатели, серводвигатели, приводы для промышленных роботов, двигатели привода экструдера и приводы подачи для станков с ЧПУ. [10]
Системы управления движением
Бесщеточные двигателиобычно используются в качестве приводов насосов, вентиляторов и шпинделей в приложениях с регулируемой или переменной скоростью, поскольку они способны развивать высокий крутящий момент с хорошим откликом скорости. Кроме того, они могут быть легко автоматизированы для дистанционного управления.Благодаря своей конструкции они имеют хорошие тепловые характеристики и высокую энергоэффективность. [11] Для получения отклика с переменной скоростью бесщеточные двигатели работают в электромеханической системе, которая включает в себя электронный контроллер двигателя и датчик обратной связи положения ротора. [12]
Бесщеточные двигатели постоянного тока широко используются в качестве сервомоторов для сервоприводов станков. Серводвигатели используются для механического перемещения, позиционирования или точного управления движением. Шаговые двигатели постоянного тока также могут быть использованы в качестве серводвигателей; однако, поскольку они работают с управлением с разомкнутым контуром, они, как правило, демонстрируют пульсации крутящего момента. [13] Бесщеточные двигатели постоянного тока больше подходят в качестве серводвигателей, поскольку их точное движение основано на замкнутой системе управления, которая обеспечивает жесткое управление и стабильную работу. [ цитирование необходимо ]
Системы позиционирования и приведения в действие
Бесщеточные двигателииспользуются для промышленного позиционирования и приведения в действие. [14] Для сборочных роботов, [15] бесщеточных шаговых или серводвигателей используются для позиционирования детали для сборки или инструмента для производственного процесса, такого как сварка или покраска. [ оспаривается — обсуждается ] Бесщеточные двигатели также могут использоваться для привода линейных приводов. [16]
Двигатели, которые непосредственно производят линейное движение, называются линейными двигателями. Преимущество линейных двигателей состоит в том, что они могут производить линейное движение без необходимости использования системы передачи, такой как шариковые винты, ходовой винт, реечный механизм, кулачок, зубчатые колеса или ремни, которые были бы необходимы для вращающихся двигателей. Известно, что системы передачи обеспечивают меньшую чувствительность и сниженную точность.Бесщеточные линейные двигатели постоянного тока с прямым приводом состоят из щелевого статора с магнитными зубьями и подвижного привода, который имеет постоянные магниты и обмотки катушки. Для получения линейного движения контроллер двигателя возбуждает обмотки катушки в приводе, вызывая взаимодействие магнитных полей, приводящее к линейному движению. [10] Трубчатые линейные двигатели — это еще одна форма конструкции линейного двигателя, работающая аналогичным образом.
Авиамоделирование
 Управляемый микропроцессором двигатель BLDC для микроуправляемого самолета.Этот двигатель с внешним ротором весит 5 г и потребляет примерно 11 Вт.
Управляемый микропроцессором двигатель BLDC для микроуправляемого самолета.Этот двигатель с внешним ротором весит 5 г и потребляет примерно 11 Вт.
Бесщеточные двигатели стали популярным выбором моделей для самолетов, включая вертолеты и беспилотники. Их благоприятное соотношение мощности к весу и широкий диапазон доступных размеров, от менее 5 грамм до больших двигателей, рассчитанных на мощность в диапазоне выходных киловатт, произвели революцию на рынке моделей с электрическим приводом, вытеснив практически все щеточные электродвигатели, кроме для маломощных недорогих, часто игрушечных самолетов. [ цитата нужна ] Они также способствовали росту простых, легких электрических моделей самолетов, а не предыдущих двигателей внутреннего сгорания, приводивших в действие более крупные и тяжелые модели. Увеличенное отношение мощности к весу современных батарей и бесщеточных двигателей позволяет моделям подниматься вертикально, а не подниматься постепенно. Низкий уровень шума и отсутствие массы по сравнению с двигателями внутреннего сгорания с небольшим раскаленным топливом является еще одной причиной их популярности.
Правовые ограничения на использование модельных самолетов с приводом от двигателя внутреннего сгорания в некоторых странах, чаще всего из-за возможного шумового загрязнения — даже с помощью специально разработанных глушителей для почти всех модельных двигателей, доступных в последние десятилетия — также поддержали этот сдвиг к мощным электрическим системам.
Радиоуправляемые машины
Их популярность также возросла в области радиоуправляемых автомобилей. Бесщеточные двигатели были разрешены для гоночных автомобилей RC в Северной Америке в соответствии с Radio Operated Auto Racing (ROAR) с 2006 года. Эти двигатели обеспечивают большую мощность для гонщиков RC и, в сочетании с соответствующей передачей и литиевым полимером с высоким разрядом (Li) -Po) или литий-железо-фосфатные (LiFePO4) батареи, эти автомобили могут развивать скорость свыше 160 километров в час (99 миль в час). [17]
Бесщеточные двигатели способны создавать больший крутящий момент и имеют более высокую пиковую скорость вращения по сравнению с нитро- или бензиновыми двигателями. Пиковая мощность двигателей Nitro составляет 46 800 об / мин и 2,2 кВт (3,0 л.с.), в то время как меньший бесщеточный двигатель может достигать 50 000 об / мин и 3,7 кВт (5,0 л.с.). Большие бесщеточные RC-моторы могут развивать мощность до 10 кВт (13 л.с.) и 28 000 об / мин для питания моделей одной пятой шкалы.
См. Также
Рекомендации
,Custom DC Маленький электродвигатель Эксперты
Электродвигатели постоянного тока или постоянного тока предназначены для широкого спектра применений. С 1986 года Power Electric помогает клиентам в разработке, проектировании и разработке небольших электродвигателей постоянного тока для широкого спектра коммерческих применений. У нас есть знания и ресурсы, необходимые для того, чтобы помочь вам найти лучший двигатель для вашего OEM-приложения и бюджета.
Зачем выбирать Power Electric для ваших потребностей в электродвигателе постоянного тока?
В Power Electric мы понимаем, что у вас есть много вариантов при выборе небольших электродвигателей постоянного тока.Мы также понимаем, что выбор лучшего поставщика для вашего проекта может быть сложной задачей. Наши клиенты выбирают нас по многим причинам, в том числе:
- Наше обязательство: Мы стремимся помочь вам в поиске, приобретении и обслуживании небольших электродвигателей постоянного тока, которые соответствуют всем вашим требованиям. Однако наш сервис на этом не останавливается. Мы стремимся стать партнером, на которого можно положиться во всех ваших потребностях в электродвигателе.
- Наши знания: Выбрать идеальный двигатель для уникального применения и бюджета не так просто, как выбрать один с полки или заказать его онлайн.Наши эксперты по электродвигателям помогут вам определить все требования вашего конкретного применения и наиболее приемлемые варианты двигателей для их удовлетворения.
- Наше качество: Мы поддерживаем строгие стандарты качества и работаем только с производителями, которые постоянно им соответствуют. Когда вы приобретаете двигатели через нас, вы можете быть уверены, что они выдержат испытание временем и что у вас будет поддержка, если у вас возникнут проблемы.
- Наша сеть: Мы поддерживаем обширную сеть производителей по всему миру.Это позволяет нам поставлять двигатели постоянного тока для широкого спектра коммерческих применений, включая оборудование для пищевых продуктов и напитков, автоматические устройства для открывания дверей, медицинское оборудование, промышленное оборудование и многое другое.
- Наша логистическая поддержка: Быстрое и экономичное получение двигателей, когда и где они вам нужны, имеет решающее значение для успеха любого проекта. Наша опытная команда работает непосредственно с вами, чтобы помочь вам управлять логистикой снабжения, управления запасами и доставкой в соответствии с вашими конкретными прогнозами и графиками производства.
Работая с Power Electric, вы можете быть уверены, что получите подробные советы, персональное внимание и рекомендации экспертов, необходимые для удовлетворения ваших потребностей в электродвигателе постоянного тока.
0,8 В до 180 В постоянного тока
от 6 до 8 дюймов в диаметре
Sub Fractional до 3hp
Различные варианты щеток, магнитов и проводов
,|
Электродвигатели, генераторы, генераторы переменного тока и динамики объясняются с использованием анимации и схем. Это страница ресурса от Physclips, многоуровневого мультимедийного введения в физику (загрузите анимацию на этой странице). Двигатели постоянного токаПростой двигатель постоянного тока имеет катушку провода, которая может вращаться в магнитном поле. ток в катушке подается через две щетки, которые соприкасаются с разрезное кольцо.Катушка лежит в устойчивом магнитном поле. Приложенные силы на токоведущих проводах создают крутящий момент на катушке. Сила F на проволоке длиной L, несущей ток i в магнитном поле B — это iLB, умноженное на синус угла между B и i, который был бы равен 90 °, если поля были равномерно вертикальными. Направление F исходит справа Правило руки *, как показано здесь. Две силы, показанные здесь, равны и противоположны, но они смещены вертикально, поэтому они оказывают крутящий момент.(Силы на две другие стороны катушки действуют вдоль одной и той же линии и, следовательно, не имеют крутящего момента.)
Обратите внимание на влияние щеток на разрезное кольцо . Когда плоскость вращающейся катушки достигает горизонтали, щетки разорвут контакт (не так много потеряно, потому что это точка нулевого момента в любом случае — силы действовать внутрь).Момент импульса катушки переносит его за этот разрыв точка и ток затем течет в противоположном направлении, которое меняет направление магнитный диполь. Итак, после прохождения точки останова, ротор продолжает повернуть против часовой стрелки и начинает выравниваться в противоположном направлении. в следующий текст, я буду в основном использовать изображение «крутящий момент на магните», но знать, что использование щеток или переменного тока может привести к электромагнит, о котором идет речь, для изменения положения, когда ток меняет направление. Крутящий момент, создаваемый в течение цикла, изменяется в зависимости от вертикального разделения две силы. Поэтому он зависит от синуса угла между ось катушки и поля. Тем не менее, из-за разрезного кольца, это всегда в том же смысле. Анимация ниже показывает его изменение во времени, и вы можете остановить его на любом этапе и проверить направление, применяя правую руку править. Моторы и генераторыТеперь двигатель постоянного тока также является генератором постоянного тока.Посмотрите на следующую анимацию. катушка, разрезное кольцо, щетки и магнит — это то же оборудование, что и мотор выше, но катушка поворачивается, что генерирует ЭДС.Если вы используете механическую энергию, чтобы вращать катушку (N витков, область A) равномерно угловая скорость ω в магнитном поле B , это произведет синусоидальную ЭДС в катушке. ЭДС (ЭДС или электродвижущая сила — почти то же самое, что и напряжение). Пусть θ будет угол между B и нормалью к катушке, поэтому магнитный поток φ равен NAB.сов θ. Закон Фарадея дает: Анимация выше будет называться генератором постоянного тока. Как в двигателе постоянного тока, концы катушки соединяются с разрезным кольцом, две половины которого контактируют кистями. Обратите внимание, что кисти и разрезное кольцо «исправляют» произведенную ЭДС: контакты организованы так, что ток всегда будет течь в одном и том же направление, потому что, когда катушка поворачивает мимо мертвой точки, где щетки встретить зазор в кольце, соединения между концами катушки и внешние клеммы меняются местами.ЭДС здесь (пренебрегая мертвой точкой, которая обычно происходит при нулевом напряжении) | NBAω грех ωt |, как набросал.генератор переменного токаЕсли мы хотим AC, нам не нужно исправление, поэтому нам не нужны разделительные кольца. (Это Это хорошая новость, потому что разрезные кольца вызывают искры, озон, радиопомехи и дополнительный износ. Если вы хотите DC, часто лучше использовать генератор переменного тока и выпрямлять с диодами.)В следующей анимации две кисти касаются двух непрерывных колец, так что две внешние клеммы всегда подключены к одним и тем же концам катушки.В результате получается неопознанная синусоидальная ЭДС, заданная NBAω sin ωt, что показано в следующей анимации. Это генератор переменного тока. Преимущества переменного и постоянного тока генераторы сравниваются в разделе ниже. Мы видели выше, что двигатель постоянного тока также генератор постоянного тока. Аналогично, генератор переменного тока также является двигателем переменного тока. Тем не мение, это довольно негибкий. (Смотри как настоящие электромоторы работают более подробно.) Обратный ЭДСТеперь, как показывают первые две анимации, двигатели и генераторы постоянного тока могут быть то же самое.Например, моторы поездов становятся генераторами, когда поезд замедляется: они преобразуют кинетическую энергию в электрическую и власть обратно в сетку. Недавно несколько производителей начали производить автомобили рационально. В таких автомобилях также используются электродвигатели для управления автомобилем. используется для зарядки аккумуляторов, когда автомобиль остановлен — это называется регенеративным торможения.Итак, вот интересное следствие. Каждый двигатель — это генератор . Это правда, в некотором смысле, даже когда он функционирует как мотор.ЭДС это мотор генерирует называется обратно ЭДС . ПротивоЭДС увеличивается с скорость, из-за закона Фарадея. Итак, если двигатель не имеет нагрузки, он очень быстро и ускоряется до обратной эдс, плюс падение напряжения из-за потерь, равное напряжение питания. Обратный ЭДС можно рассматривать как «регулятор»: он останавливает двигатель бесконечно быстро (тем самым, избавляя физиков от смущения). Когда двигатель загружен, то фаза напряжения становится ближе к фазе тока (начинает выглядеть резистивным), и это кажущееся сопротивление дает напряжение.Итак, спина ЭДС требуется меньше, и двигатель вращается медленнее. (Добавить обратно ЭДС, которая является индуктивной, к резистивному компоненту, вам нужно добавить напряжения которые не в фазе. См AC схемы.) Катушки обычно имеют сердечники На практике (и в отличие от нарисованных нами диаграмм) генераторы и постоянный ток двигатели часто имеют сердечник с высокой проницаемостью внутри катушки, так что большие магнитные поля создаются скромными токами. Это показано слева в нижеприведенный рисунок статоров (магниты статические) являются постоянными магнитами. «Универсальные» моторыМагниты статора тоже могут быть выполнены в виде электромагнитов, как показано выше справа Два статора намотаны в одном направлении, чтобы дать поле в том же направлении, и ротор имеет поле, которое дважды меняет за цикл, потому что он связан с кистями, которые здесь опущены. Один Преимущество наличия статоров в двигателе состоит в том, что можно создать двигатель который работает от переменного или постоянного тока, так называемый универсальный двигатель .Когда вы едете такой двигатель с переменным током, ток в катушке меняется дважды в каждом цикле (помимо изменений от кистей), но полярность статоров изменения в то же время, поэтому эти изменения отменяются. (К сожалению, однако, есть еще кисти, хотя я спрятал их в этом наброске.) Для преимуществ и Недостатки статора с постоянным магнитом по сравнению со статорами с обмоткой см. ниже. Также увидеть больше на универсальных моторах. Сборка простого мотораЧтобы построить этот простой, но странный мотор, вам понадобятся два довольно сильных магнита. (редкоземельные магниты диаметром около 10 мм будут в порядке, как и более крупный стержень магниты), немного жесткой медной проволоки (не менее 50 см), два провода с крокодилом зажимы на каждом конце, батарея фонаря на шесть вольт, две банки безалкогольного напитка, два блока дерева, немного липкой ленты и острый гвоздь.Сделайте катушку из жесткого медного провода, чтобы он не нуждался в внешнем служба поддержки. Заверните от 5 до 20 витков в круг диаметром около 20 мм и два конца направлены радиально наружу в противоположных направлениях. Эти концы будут быть осью и контактами. Если провод имеет лаковую или пластиковую изоляцию, раздеть его на концах.
Двигатели переменного токаС помощью переменного тока мы можем менять направление поля без использования щеток.Это хорошие новости, потому что мы можем избежать искрения, производства озона и омическая потеря энергии, которую могут повлечь за собой щетки. Далее, потому что щетки контакт между движущимися поверхностями, они изнашиваются.Первое, что нужно сделать в двигателе переменного тока, это создать вращающееся поле. «Обычный» Переменный ток от 2 или 3-контактного разъема является однофазным переменным током — он имеет один синусоидальный Разность потенциалов генерируется только между двумя проводами — активным и нейтральным. (Обратите внимание, что заземляющий провод не проводит ток, кроме как в случае электрические неисправности.) С однофазным переменным током можно создать вращающееся поле генерируя два тока, которые не совпадают по фазе, используя, например, конденсатор. В показанном примере два тока сдвинуты по фазе на 90 °, поэтому вертикальное компонент магнитного поля является синусоидальным, а горизонтальный — косусоидальным, как показано. Это дает поле, вращающееся против часовой стрелки. (* меня попросили объяснить это: от простого кондиционера Теория, ни катушки, ни конденсаторы не имеют напряжения в фазе с электрический ток.В конденсаторе напряжение является максимальным, когда заряд закончил течь на конденсатор, и собирается начать течь. Таким образом, напряжение отстает от тока. В чисто индуктивной катушке падение напряжения является наибольшим, когда ток меняется наиболее быстро, что также когда ток равен нулю. Напряжение (падение) опережает ток. В моторных катушках фазовый угол меньше 90, потому что электрический энергия преобразуется в механическую энергию.) В этой анимации графики показывают изменение во времени течений в вертикальных и горизонтальных катушках. Участок поля составляющих B x и B y показывает, что векторная сумма этих двух полей является вращающейся поле. Основное изображение показывает вращающееся поле. Это также показывает полярность магнитов: как указано выше, синий представляет северный полюс, а красный — южный полюс. Если мы поместим постоянный магнит в этой области вращающегося поля, или если мы положим в катушке, ток которой всегда идет в одном направлении, то это становится синхронный двигатель .При широком диапазоне условий двигатель будет повернуть со скоростью магнитного поля. Если у нас много статоров, вместо только из двух пар, показанных здесь, то мы могли бы рассматривать его как шаговый двигатель: каждый импульс перемещает ротор на следующую пару задействованных полюсов. Пожалуйста, помните мое предупреждение об идеализированной геометрии: настоящие шаговые двигатели есть десятки полюсов и довольно сложной геометрии! Асинхронные двигателиТеперь, поскольку у нас есть изменяющееся во времени магнитное поле, мы можем использовать индуцированную ЭДС в катушке — или даже только вихревые токи в проводнике — чтобы сделать ротор магнит.Это верно, когда у вас есть вращающееся магнитное поле, вы можете просто вставьте проводник, и он получится. Это дает некоторые из преимуществ асинхронные двигатели : нет щеток или коммутатора, что упрощает производство, нет износ, отсутствие искр, образование озона и отсутствие потерь энергии с ними. Внизу слева приведена схема асинхронного двигателя. (Для фотографий реальные асинхронные двигатели и более подробную информацию, см. Индукционные двигатели).Анимация справа представляет короткозамкнутого двигателя .Белка клетка имеет (в этой упрощенной геометрии, во всяком случае!) два круглых проводника, соединенных на несколько прямых баров. Любые два стержня и дуги, которые соединяют их, образуют катушка — как показано синей чертой в анимации. (Только два из для простоты было показано много возможных схем.) Эта схема показывает, почему их можно назвать двигателями с короткозамкнутым ротором. Реальность другая: фотографии и подробности см. В разделе «Индукция». моторы. Проблема с асинхронными и короткозамкнутыми двигателями показана в этой анимации, что конденсаторы высокого значения и высокого напряжения дорогиеОдним из решений является двигатель с «затененным полюсом», но его вращающийся поле имеет некоторые направления, где крутящий момент мал, и он имеет тенденцию бежать назад при некоторых условиях. Самый лучший способ избежать этого использовать многофазные двигатели. Трехфазные асинхронные двигатели переменного токаЕдинственная фаза используется в домашних условиях для приложений с низким энергопотреблением, но у него есть некоторые недостатки. Во-первых, он выключается 100 раз в секунду (вы не обратите внимание, что флуоресцентные лампы мерцают на этой скорости, потому что ваши глаза слишком медленные: даже 25 кадров в секунду на телевизоре достаточно быстры, чтобы иллюзия непрерывного движения.) Во-вторых, это делает его неловким производить вращающиеся магнитные поля. По этой причине некоторая высокая мощность (несколько кВт) бытовые устройства могут потребовать трехфазной установки. Промышленные применения широко использовать три фазы, а трехфазный асинхронный двигатель является стандартным рабочая лошадка для мощных применений. Три провода (не считая земли) несут три возможных разности потенциалов, которые не в фазе с каждым другой на 120 °, как показано на анимации ниже. Таким образом три статора дают плавно вращающееся поле.(Посмотри это ссылка для получения дополнительной информации о трехфазном питании.)Если положить в такой набор статоров постоянный магнит, он становится синхронным трехфазный двигатель . Анимация показывает клетку белка, в которой для простота показана только одна из множества индуктированных токовых петель. С нет механическая нагрузка, она вращается практически в фазе с вращающимся полем. Ротор не должен быть короткозамкнутым: фактически любой проводник, который будет несущие вихревые токи будут вращаться, стремясь следовать вращающемуся полю.Такое расположение может дать асинхронный двигатель , способный к высокой эффективности, высокая мощность и высокий крутящий момент в диапазоне скоростей вращения. Линейные моторыНабор катушек может быть использован для создания магнитного поля, которое переводит, скорее чем вращается. Пара катушек в анимации ниже пульсирует от слева направо, поэтому область магнитного поля перемещается слева направо. постоянный или электромагнит будет стремиться следовать за полем. Так бы простой плита из проводящего материала, потому что вихревые токи, индуцированные в нем (не показаны) содержат электромагнит.В качестве альтернативы, мы могли бы сказать, что от Фарадея закон, ЭДС в металлической плите всегда вызывается, чтобы противостоять любым изменениям в магнитном потоке, и силы на токах, вызванных этой эдс, сохраняют поток в плите почти постоянный. (Вихревые токи не показаны в этой анимации.)В качестве альтернативы, мы могли бы иметь наборы катушек с электропитанием в подвижной части, и вызвать вихревые токи в рельсе. В любом случае мы получаем линейный двигатель, который был бы полезен, скажем, в поездах Маглев.(В анимации геометрия как обычно на этом сайте, высоко идеализирован, и только один вихревой ток показано.) Некоторые заметки о двигателях переменного и постоянного тока для мощных применений
Однофазные асинхронные двигатели имеют проблемы для комбинирования приложений высокая мощность и гибкие условия нагрузки. Проблема заключается в создании вращающееся поле. Конденсатор может быть использован для помещения тока в один набор Катушки впереди, но конденсаторы высокого напряжения высокого напряжения стоят дорого. Затенение вместо этого используются полюса, но крутящий момент мал под некоторыми углами. Если не можешь создать плавно вращающееся поле, и если нагрузка «скользит» далеко позади поле, то крутящий момент падает или даже меняет направление. В электроинструментах и некоторых приборах используются щеточные двигатели переменного тока. Щетки вводят потери (плюс искрение и производство озона). Полярности статора меняются местами 100 раз в секунду. Даже если материал сердечника выбран для минимизации гистерезиса потери («потери в железе»), это способствует неэффективности и возможности от перегрева. Эти моторы можно назвать «универсальными» двигатели, потому что они могут работать на постоянном токе. Это решение дешево, но сыро и неэффективно. Для приложений с относительно низким энергопотреблением, таких как электроинструменты, неэффективность обычно не является экономически важной. Если доступен только однофазный переменный ток, можно выпрямить переменный ток и использовать Двигатель постоянного тока. Сильноточные выпрямители раньше были дорогими, но становятся менее дорогой и более широко используемый. Если вы уверены, что понимаете принципы, пришло время перейти к Как настоящие электромоторы работы Джона Стори. Или продолжайте здесь, чтобы найти о громкоговорителях и трансформаторах. ГромкоговорителиГромкоговоритель — это линейный двигатель с небольшим диапазоном.Имеет один движущийся катушка, которая постоянно, но гибко подключена к источнику напряжения, так что есть нет кистей.
Громкоговорители как микрофоныНа рисунке выше вы можете видеть, что картонная диафрагма (диффузор громкоговорителя) соединена с катушкой провода в магнитном поле. Если звуковая волна перемещает диафрагму, катушка будет двигаться в поле, генерируя напряжение. Это принцип динамического микрофона — хотя в большинстве микрофонов диафрагма немного меньше, чем диффузор громкоговорителя. Итак, динамик должен работать как микрофон. Это хороший проект: все, что вам нужно — это динамик и два провода для подключения его к входу осциллографа или микрофонному входу вашего компьютера.Два вопроса: как вы думаете, что масса конуса и катушки будет делать с частотной характеристикой? Как насчет длины волны используемых вами звуков?
ТрансформаторыНа фотографии показан трансформатор, предназначенный для демонстрационных целей: первичная и вторичная катушки четко разделены и могут быть удалены и заменили, подняв верхнюю часть сердечника. Для наших целей, обратите внимание что катушка слева имеет меньше катушек, чем справа (вставки показать крупные планы). На схеме и схеме показан повышающий трансформатор. Чтобы сделать понижающий трансформатор, нужно только поместить источник справа и нагрузку слева. ( Важно Указание по безопасности : для настоящего трансформатора вы можете «только вставить его назад» только после проверки, что номинальное напряжение было соответствующим.) Итак, как же трансформатор работает? Сердцевина (затененная) обладает высокой магнитной проницаемостью, т.е. материалом, который образует магнитное поле намного легче, чем свободное пространство, благодаря ориентации атомных диполей.(На фотографии ядро из ламинированного мягкого железа.) В результате поле сосредоточено внутри ядра, и почти никакие полевые линии не покидают ядро. Если следует, что магнитные потоки φ через первичный и вторичный примерно равны, как показано. Из Фарадея закон, ЭДС в каждом витке, будь то в первичной или вторичной катушке, составляет -dφ / dt. Если пренебречь сопротивлением и другими потерями в трансформаторе, терминал напряжение равно ЭДС. Для N р оборотов первичного дает Для N с витков вторичной обмотки это дает Разделив эти уравнения, получим уравнение для трансформатора где r — коэффициент поворотов.А как насчет тока? Если мы пренебрегаем потерями в трансформатор (см. раздел ниже по эффективности), и если мы предположим, что напряжение и ток имеют одинаковые фазовые отношения в первичной и вторичный, то из сохранения энергии мы можем написать в устойчивом состоянии:
V p I p = V s I s , откуда I с / I р = N р / N с = 1 / р. В некоторых случаях уменьшение тока является целью упражнения. В силе линий электропередачи, например, потери мощности при нагреве проводов из-за их ненулевое сопротивление пропорционально квадрату тока.Таким образом, это экономит много энергии для передачи электроэнергии от электростанции в город при очень высоких напряжениях, так что токи только скромные. Наконец, и снова, предполагая, что трансформатор идеален, давайте спросим, что резистор во вторичной цепи «похож» на первичную цепь. В первичной цепи:
V p / I p = V с / r 2 I с = Р / р 2 . КПД трансформаторовНа практике реальные трансформаторы менее чем на 100% эффективны.
Подробнее о трансформаторах: генераторы переменного и постоянного токаТрансформаторы работают только на переменном токе, что является одним из больших преимуществ переменного тока. трансформеры позвольте 240 В понизиться до удобных уровней для цифровой электроники (всего несколько вольт) или для других приложений с низким энергопотреблением (обычно 12 В). трансформеры увеличьте напряжение для передачи, как указано выше, и уменьшите для безопасного распределение. Без трансформаторов, трата электроэнергии в распределении сети, уже высокие, были бы огромными.Есть возможность конвертировать напряжения в постоянном токе, но сложнее, чем в переменном. Кроме того, такие преобразования часто неэффективно и / или дорого. AC имеет еще то преимущество, что его можно использовать на двигателях переменного тока, которые обычно предпочтительнее двигателей постоянного тока для применений с высокой мощностью.Другие ресурсы от насНекоторые внешние ссылки на веб-ресурсы по двигателям и генераторам
Какая разница между постоянными магнитами а наличие электромагнитов в двигателе постоянного тока? Это делает его более эффективным или более могущественный? Или просто дешевле? Когда я получил этот вопрос на Высшем Школьная доска объявлений по физике, я отправил ее Джону Этаж, а также выдающийся астроном, строитель электромобилей.Вот его ответ: В целом, для небольшого мотора гораздо дешевле использовать постоянные магниты. Материалы с постоянными магнитами продолжают улучшаться и стали такими недорогими что даже правительство будет присылать вам бессмысленные магниты на холодильник через почту. Постоянные магниты также более эффективны, потому что нет питания тратится впустую, создавая магнитное поле. Так почему же нужно использовать поле раны? Двигатель постоянного тока? Вот несколько причин:
Мнения, выраженные в этих примечаниях, являются моими и не обязательно отражают политика Университета Нового Южного Уэльса или Школы физики. анимации были сделаны Джорджем Hatsidimitris. Джо Wolfe / [email protected]/ 61-2-9385 4954 (UT + 10, +11 октябрь-март) |
Похожие записи
