Как устроены и работают электродвигатели переменного тока. Какие существуют типы асинхронных и синхронных двигателей. Где применяются моторы переменного тока. Каковы их преимущества и недостатки.
Принцип работы электродвигателя переменного тока
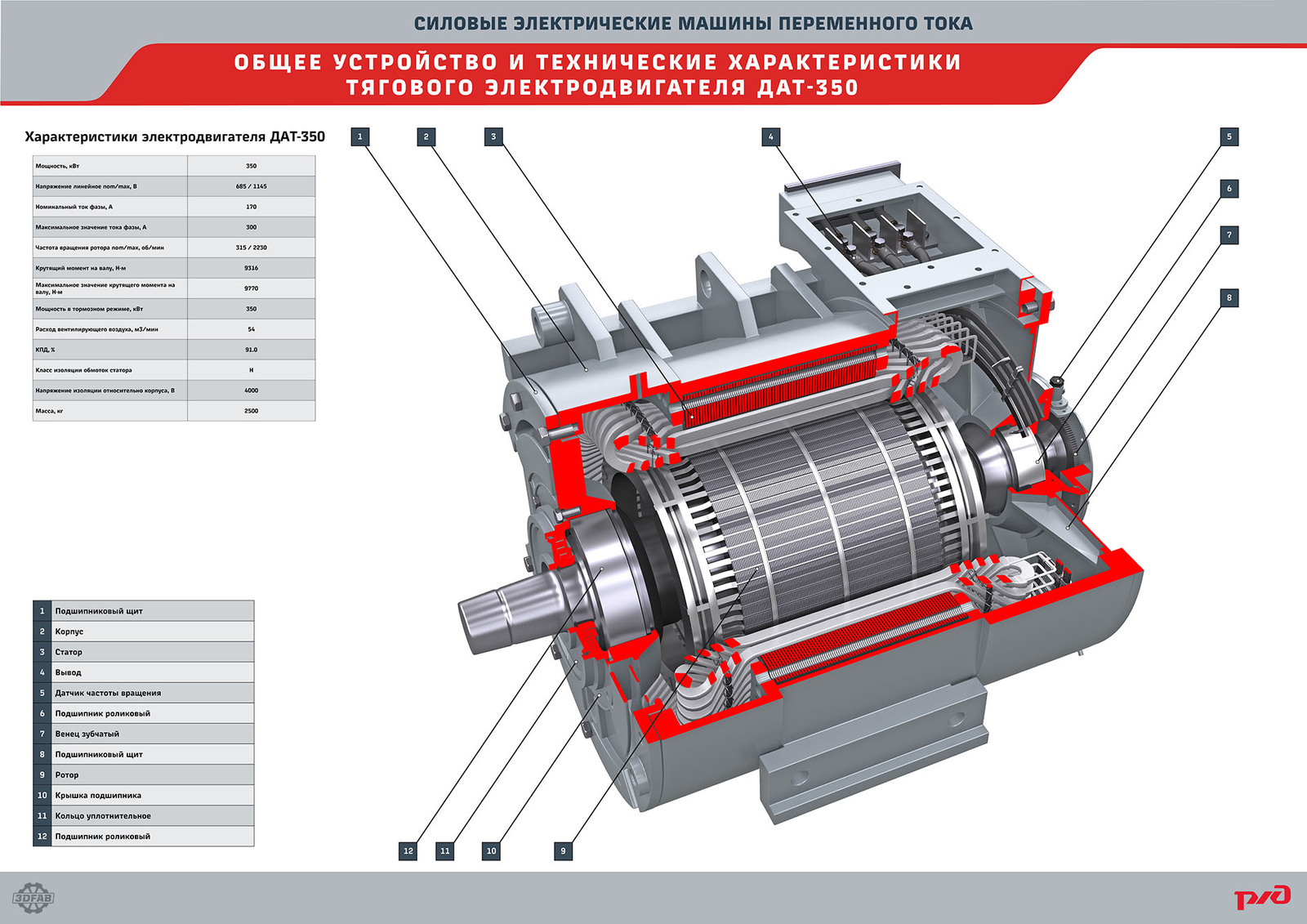
Электродвигатель переменного тока преобразует электрическую энергию в механическую, используя переменный ток. Его основными компонентами являются:
- Статор — неподвижная часть с обмотками
- Ротор — вращающаяся часть на валу
- Магнитопровод — сердечник из электротехнической стали
Принцип действия основан на взаимодействии вращающегося магнитного поля статора и магнитного поля ротора. Как это работает?
- Переменный ток в обмотках статора создает вращающееся магнитное поле
- Это поле индуцирует токи в обмотке ротора
- Взаимодействие полей статора и ротора создает вращающий момент
- Ротор начинает вращаться вслед за полем статора
Скорость вращения ротора немного отстает от скорости поля статора. Эта разница называется скольжением.
Основные виды электродвигателей переменного тока
Существует два основных типа электродвигателей переменного тока:
1. Асинхронные двигатели
Это наиболее распространенный тип. Их особенности:
- Простая и надежная конструкция
- Скорость вращения ротора меньше скорости магнитного поля
- Не требуют дополнительного питания ротора
2. Синхронные двигатели
Отличаются следующими характеристиками:
- Ротор вращается синхронно с магнитным полем статора
- Требуют возбуждения ротора постоянным током
- Обеспечивают более точную регулировку скорости
Преимущества электродвигателей переменного тока
Двигатели переменного тока имеют ряд важных достоинств:
- Высокая надежность и длительный срок службы
- Простота конструкции и обслуживания
- Возможность работы напрямую от сети переменного тока
- Высокий КПД (до 95% и выше)
- Хорошие пусковые характеристики
- Низкая стоимость по сравнению с двигателями постоянного тока
Недостатки моторов переменного тока
К основным недостаткам можно отнести:
- Сложность регулирования скорости вращения
- Высокий пусковой ток (в 5-7 раз выше номинального)
- Низкий пусковой момент у некоторых типов
- Необходимость компенсации реактивной мощности
Области применения электродвигателей переменного тока
Моторы переменного тока широко используются в различных отраслях:

- Промышленное оборудование (станки, насосы, вентиляторы)
- Транспорт (электровозы, трамваи, троллейбусы)
- Бытовая техника (стиральные машины, холодильники)
- Лифты и эскалаторы
- Компрессоры и воздуходувки
- Строительная техника (бетономешалки, подъемники)
Выбор электродвигателя переменного тока
При выборе двигателя необходимо учитывать следующие факторы:
- Требуемая мощность и крутящий момент
- Скорость вращения
- Режим работы (продолжительный, повторно-кратковременный)
- Условия эксплуатации (температура, влажность, запыленность)
- Способ охлаждения
- Конструктивное исполнение (на лапах, фланцевое и т.д.)
Регулирование скорости вращения
Существует несколько способов изменения скорости асинхронных двигателей:
- Изменение частоты питающего напряжения с помощью преобразователя частоты
- Изменение числа пар полюсов обмотки статора
- Реостатное регулирование в цепи ротора (для двигателей с фазным ротором)
- Изменение напряжения, подаваемого на статор
Наиболее эффективным и распространенным является частотное регулирование с помощью преобразователей.

Обслуживание электродвигателей переменного тока
Для обеспечения длительной и надежной работы требуется регулярное обслуживание:
- Периодическая очистка от пыли и грязи
- Проверка состояния подшипников
- Контроль сопротивления изоляции обмоток
- Проверка надежности электрических соединений
- Смазка подшипников (если предусмотрено конструкцией)
- Балансировка ротора при повышенной вибрации
При правильном обслуживании срок службы двигателя может составлять 15-20 лет и более.
Перспективы развития электродвигателей переменного тока
Основные направления совершенствования:
- Повышение энергоэффективности
- Применение новых магнитных материалов
- Интеграция электроники и систем управления
- Разработка двигателей с постоянными магнитами
- Создание высокоскоростных электродвигателей
Электродвигатели переменного тока продолжают оставаться основным типом электропривода в промышленности и быту благодаря своей надежности, экономичности и простоте конструкции.
Электродвигатели переменного тока — Электропроект
-
Электродвигатели асинхронные (серии)
- Электродвигатели серии АИР50
- Электродвигатели серии АИР56
- Электродвигатели серии АИР63
- Электродвигатели серии АИР71
- Электродвигатели серии АД71
- Электродвигатели серии АИР80
- Электродвигатели серии АД80
- Электродвигатели серии АИР90
- Электродвигатели серии АД90
- Электродвигатели серии АИР100
- Электродвигатели серии АДМ100
- Электродвигатели серии АИР112
- Электродвигатели серии АИРМ112
- Электродвигатели серии АИР132
- Электродвигатели серии АД132
- Электродвигатели серии АИР160
- Электродвигатели серии АД160
- Электродвигатели серии АИР180
- Электродвигатели серии А180
- Электродвигатели серии АИР200
- Электродвигатели серии АД200
- Электродвигатели серии А200
- Электродвигатели серии АИР225
- Электродвигатели серии АД225
- Электродвигатели серии А225
- Электродвигатели серии А250
- Электродвигатели серии А280
Вам нужен авторитетный и надежный поставщик электродвигателей переменного тока? Компания «Электропроект» может стать для вас именно таким поставщиком. Обратившись к нам, вы можете быть уверены в высоком качестве и доступных ценах на предлагаемые электродвигатели.
Обратившись к нам, вы можете быть уверены в высоком качестве и доступных ценах на предлагаемые электродвигатели.
Электродвигатели переменного тока являются сегодня наиболее распространенными. Прежде всего, потому, что электросеть в мире питается как раз переменным током.
Компания «Электропроект» предлагает следующие типы электродвигателей переменного тока:
- Асинхронные электродвигатели. Здесь частота вращения ротора несколько отличается от частоты вращающего магнитного поля. Такие двигатели наиболее распространены сегодня. Асинхронные двигатели , активно применяются при производстве приводов различного оборудования: станков, вентиляторов, насосов, дымососов, конвейеров, грузоподъемного оборудования.
- Электродвигатели многоскоростные . Предназначены для привода самых различных механизмов, при работе которых требуется ступенчатое регулирование частоты вращения. Такие двигатели рассчитаны для работы от сети переменного трехфазного тока.
- Электродвигатели асинхронные с фазным ротором
.
 Используются в тех случаях, когда надо уменьшить пусковой ток, увеличить пусковой момент, а также когда требуется регулирование скорости в незначительных пределах. Такие двигатели имеют большой начальный вращающий момент, постоянную скорость при различных перегрузках и возможность кратковременных механических перегрузок.
Используются в тех случаях, когда надо уменьшить пусковой ток, увеличить пусковой момент, а также когда требуется регулирование скорости в незначительных пределах. Такие двигатели имеют большой начальный вращающий момент, постоянную скорость при различных перегрузках и возможность кратковременных механических перегрузок.
Компания «Электропроект» предоставляет на ваш выбор широкий спектр моделей электродвигателей переменного тока, отличающихся по техническим характеристикам, способу размещения и климатическому исполнению. Все двигатели переменного тока соответствуют ГОСТ или ТУ и на них распространяется фирменная заводская гарантия. При оптовых поставках стоимость электродвигателей может быть снижена. Доставка электродвигателей возможна в любую точку России. Возможен наличный и безналичный расчет.
Получить грамотную консультацию или сделать заявку на конкретную модель электродвигателя можно по следующим телефонам: (343) 268-86-63, 254–78–90, 261–10–29, 383–12–41, 254–43–09, 383–12–40, 268–86–62, 263–70–77, 263–79–21.
Появление электродвигателей переменного тока — Control Engineering Russia
АЛЕКСАНДР МИКЕРОВ, д. т. н., проф. каф. систем автоматического управления СПбГЭТУ «ЛЭТИ»
В предыдущих статьях [1, 2] описывались первые электрические двигатели с питанием от гальванических батарей. Однако во второй половине XIX века в связи с развитием электрического освещения и дальней передачи электроэнергии появились сети однофазного переменного тока [3]. Это и дало толчок к изобретению электродвигателей переменного тока.
Рис. 1. Двигатель Уитстона
Первый однофазный двигатель был предложен в 1841 г. английским физиком Чарльзом Уитстоном (Charles Wheatstone), известным также своими изобретениями в области электрогенераторов и измерительной техники. Такой двигатель подключается к источнику переменного тока и содержит (рис. 1) статор с шестью электромагнитами (1) и ротор (2) в виде медного диска с тремя подковообразными магнитами (3) полярностью
N и S.
Все электромагниты включены последовательно так, что при любой полярности питающего напряжения в промежутках между ними формируются магнитные потоки или полюса чередующейся полярности n и s, показанные на рис. 1 в начальный момент времени t1 для положительного полупериода питающего напряжения. Предположим, что ротор вращается против часовой стрелки, и рассмотрим силы, действующие на верхний магнит ротора (аналогично работают и остальные магниты). Поскольку разноименные полюса магнитов притягиваются, а одноименные отталкиваются, вращающий момент ротора будет направлен против часовой стрелки, поддерживая его вращение. Если ротор двигателя успеет за полупериод напряжения повернуться на 60°, то в следующий полупериод все полюса статора поменяют полярность и ротор повернется еще на 60°. Таким образом, ротор будет поворачиваться синхронно с частотой перемагничивания электромагнитов (частотой сети), отчего подобные двигатели по предложению Чарльза Штейнмеца и получили название синхронных.
Рис. 2. Векторная диаграмма двигателя
Магнитное поле статора такого двигателя можно изобразить в виде вектора (рис. 2), где Ф1, Ф2,… Ф6 — магнитные потоки статора, взаимодействующие с ротором в последовательные моменты времени t1, t2, … t6, когда питающее напряжение меняет свой знак. Получается, что вектор магнитного потока статора шагает по окружности синхронно с ротором, поэтому такое магнитное поле можно назвать шагающим.
При реальных частотах сети 50–60 Гц такой двигатель, конечно, запуститься не сможет, но если его ротор раскрутить, например, вручную или другим двигателем до синхронной скорости, то он будет устойчиво работать с частотой вращения, пропорциональной частоте сети. При электрификации Лондона посредством однофазного напряжения в 1889 г. в качестве такого «раскруточного» двигателя применили так называемый универсальный двигатель (рис. 3) с обмотками якоря (1) и возбуждения (2). Его конструкция была разработана в 1884–85 гг. независимо друг от друга Вернером Сименсом и соавторами трансформатора, венгерскими инженерами Микша Дери и Отто Блати [4–6].
Его конструкция была разработана в 1884–85 гг. независимо друг от друга Вернером Сименсом и соавторами трансформатора, венгерскими инженерами Микша Дери и Отто Блати [4–6].
Рис. 3. Универсальный двигатель
Универсальные двигатели до сих пор широко применяются при мощности до нескольких киловатт, особенно в бытовой технике. Они привлекают производителей легкостью изменения скорости с помощью регулирования напряжения, как в обычном двигателе постоянного тока. Однако для мощных приводов такое регулирование было в то время затруднительным. Поэтому для электрической тяги на железных дорогах и в лифтах с питанием от сети переменного тока стали применять так называемый репульсионный двигатель, изобретенный в 1885 г. знаменитым американским электротехником Илайю Томсоном (Elihu Thomson) и усовершенствованный позднее Микша Дери [3, 5, 6].
Рис. 4. Репульсионный двигатель
Илайю Томсон (1853–1937), родом из Англии, соединял в себе таланты блестящего университетского профессора, крупного инженера, плодовитого изобретателя (696 патентов) и успешного предпринимателя [7]. Он разработал различные системы электрического освещения, высокочастотные генератор и трансформатор, самопишущий ваттметр, один из способов электросварки, а также, например, улучшил рентгеновские трубки. Томсон основал электротехнические компании в Англии, Франции и США. В 1892 г. его компания Thomson–Houston слилась с компанией Эдисона, образовав крупнейшую электротехническую компанию мира — General Electric.
Он разработал различные системы электрического освещения, высокочастотные генератор и трансформатор, самопишущий ваттметр, один из способов электросварки, а также, например, улучшил рентгеновские трубки. Томсон основал электротехнические компании в Англии, Франции и США. В 1892 г. его компания Thomson–Houston слилась с компанией Эдисона, образовав крупнейшую электротехническую компанию мира — General Electric.
По конструкции репульсионный двигатель, схема которого показана на рис. 4, похож на универсальный двигатель с якорем (1) и возбуждением в виде электромагнита (2). Отличие состоит в том, что щетки двигателя (3) закорочены и могут вручную поворачиваться [8]. При питании переменным напряжением в закороченной обмотке якоря наводится ЭДС и идет ток, направление которого, в соответствии с законом Ленца, таково, что создаваемый им поток противодействует магнитному потоку статора.
Тогда, если в некоторый полупериод питающего напряжения электромагнит (2) имеет полюс N внизу, то якорь (1) — такой же полюс наверху, как показано на рис. 4, что приведет к их взаимному отталкиванию и вращению ротора по часовой стрелке. Это и объясняет название двигателя, которое в дословном переводе означает «отталкивающийся». При этом величина наводимой ЭДС, а значит, и вращающего момента определяются положением щеток. Когда они горизонтальны, ЭДС и момент максимальны (режим пуска). Далее при повороте щеток против часовой стрелки момент будет падать, а скорость нарастать. Таким образом, пуск и скорость репульсионного двигателя легко регулируются разворотом щеток без изменения напряжения питания.
4, что приведет к их взаимному отталкиванию и вращению ротора по часовой стрелке. Это и объясняет название двигателя, которое в дословном переводе означает «отталкивающийся». При этом величина наводимой ЭДС, а значит, и вращающего момента определяются положением щеток. Когда они горизонтальны, ЭДС и момент максимальны (режим пуска). Далее при повороте щеток против часовой стрелки момент будет падать, а скорость нарастать. Таким образом, пуск и скорость репульсионного двигателя легко регулируются разворотом щеток без изменения напряжения питания.
Тем не менее проблемы всех коллекторных двигателей, связанные с искрением, помехами и быстрым износом, были решены лишь после создания асинхронного двигателя. По своему устройству он гораздо проще любого двигателя постоянного тока, поэтому удивительно, что он был изобретен почти на полстолетия позже, несмотря на то, что, как отмечал Илайю Томсон: «Трудно составить такую комбинацию из магнитов переменного тока и кусков меди, которая не имела бы тенденции к вращению» [5].
Рис. 5. Галилео Феррарис (1847–1897)
Асинхронный двигатель базируется на концепции вращающегося магнитного поля, выдвинутой практически одновременно в середине 1880-х гг. двумя выдающимися учеными — Николой Теслой [3] и итальянским профессором физики Галилео Феррарисом (Galileo Ferraris) (рис. 5). Последний родился на севере Италии в семье фармацевта и после окончания Туринского университета стал профессором Музея индустрии, где изучал трансформаторы, многофазные цепи, линии передачи переменного тока, а также оптические приборы. Он прожил короткую жизнь, но успел заслужить в Европе звание «отца трехфазного тока» [5, 9, 10].
Если вернуться к концепции, то во вращающемся магнитном поле вектор магнитного потока статора постоянен по величине, но, в отличие от шагающего поля (рис. 2), непрерывно (равномерно) вращается с синхронной скоростью. Тогда очевидно, что ротор в виде магнита, помещенный внутри такого поля, будет вовлекаться им в синхронное вращение, что и происходит в рассмотренном выше двигателе Уитстона. Однако выяснилось, что аналогично будет вращаться и немагнитный ротор из любого проводящего металла. Еще в 1824 г. известный французский физик академик Доминик Араго (Dominique Arago) продемонстрировал опыт, названный им «магнетизмом вращения» [5] и показанный на рис. 6.
Однако выяснилось, что аналогично будет вращаться и немагнитный ротор из любого проводящего металла. Еще в 1824 г. известный французский физик академик Доминик Араго (Dominique Arago) продемонстрировал опыт, названный им «магнетизмом вращения» [5] и показанный на рис. 6.
Рис. 6. Опыт Араго
Диск (1) из меди или стали на стеклянной пластине (2) вращался в том же направлении, что и вращающийся магнит (3). Объяснение этому загадочному явлению нашел Майкл Фарадей в 1831 г. после открытия закона электромагнитной индукции (закона Фарадея). Согласно ему, вращающееся магнитное поле магнита индуцирует в диске вихревые токи, создающие собственное магнитное поле, взаимодействующее с вращающимся.
Рис. 7. Опыт Бейли
Этот принцип и лежит в основе современных асинхронных двигателей (в английской литературе — индукционных), имеющих металлический ротор и отличающихся только тем, что в них вращающееся магнитное поле образуется неподвижной обмоткой статора. Первый шаг к созданию такого двигателя был сделан английским физиком Уолтером Бейли (Walter Bailey) в 1879 г., заменившим в опыте Араго вращающийся магнит на четыре электромагнита (2–5), токи в которых переключались последовательно вручную (рис. 7) [5, 10]. Но такое устройство создавало шагающее через 90o магнитное поле. А как получить непрерывно (равномерно) вращающееся магнитное поле?
Первый шаг к созданию такого двигателя был сделан английским физиком Уолтером Бейли (Walter Bailey) в 1879 г., заменившим в опыте Араго вращающийся магнит на четыре электромагнита (2–5), токи в которых переключались последовательно вручную (рис. 7) [5, 10]. Но такое устройство создавало шагающее через 90o магнитное поле. А как получить непрерывно (равномерно) вращающееся магнитное поле?
На этот вопрос ответил вышеупомянутый Феррарис в 1888 г. в докладе Туринской академии наук, математически сформулировав два условия [5, 10]:
- Обмотка двигателя должна содержать две независимые части (называемые теперь фазами), магнитные потоки которых геометрически взаимно перпендикулярны.
- Фазы должны быть запитаны двумя гармоническими напряжениями, сдвинутыми на четверть периода (синус и косинус).
Позднее Михаил Осипович Доливо-Добровольский предложил называть такую систему токов Drehstrom, что в дословном переводе с немецкого означает «вращательный ток» [6].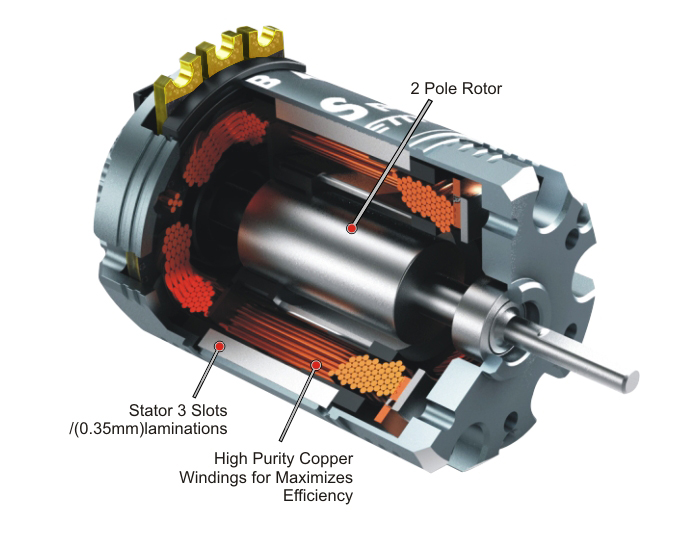
Рис. 8. Двухфазный двигатель Феррариса
Свою теорию Феррарис блестяще подтвердил макетом двигателя мощностью 3 Вт (рис. 8), имеющего ротор (1) в виде полого медного стаканчика и статор (2) с фазами A и B. Фазы разделены на две секции с разным числом витков, намотанных проводом разного диаметра так, чтобы создавать индуктивный сдвиг фаз токов в 90° при питании от однофазной сети.
В 1890 г. французские инженеры Морис Хитин (Maurice Hutin) и Морис Леблан (Maurice Leblanc) предложили использовать для сдвига фаз токов конденсатор [6]. В таком виде двухфазный двигатель дожил до наших дней под названием конденсаторного двигателя. При этом габариты конденсатора соизмеримы с размерами самого двигателя, поэтому данное техническое решение пригодно только для маломощных двигателей.
Сам Феррарис также заявлял, что «…аппарат, основанный на исследованном нами принципе, не может иметь никакого промышленного значения как двигатель» [10]. Поэтому он его не запатентовал (как, впрочем, и остальные свои открытия) и отклонил, в отличие от Теслы, предложение Вестингауза о сотрудничестве.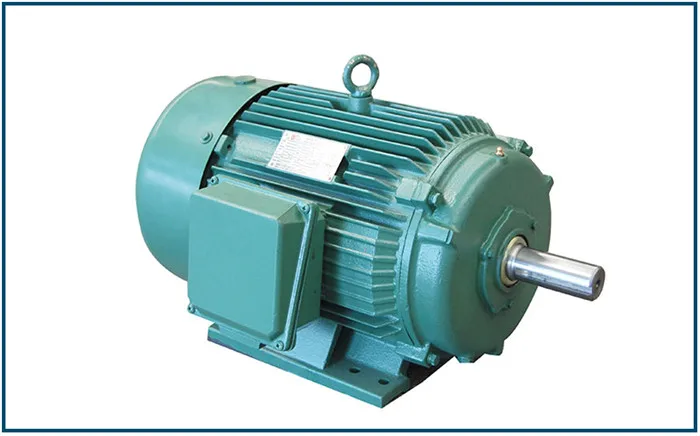 Тем не менее его работы дали впоследствии повод оспаривать патенты Теслы в некоторых из 25 судебных процессов компании Вестингауза [5, 9]. Пессимистический вывод о перспективах своего двигателя Феррарис сделал, оценив величину его КПД в точке максимума мощности на валу — ниже 50%. Однако в данной точке это справедливо и для двигателей постоянного тока. Поэтому в дальнейшем рабочие точки стали выбирать ближе к скорости холостого хода, где в идеале КПД любого электродвигателя стремится к 100%.
Тем не менее его работы дали впоследствии повод оспаривать патенты Теслы в некоторых из 25 судебных процессов компании Вестингауза [5, 9]. Пессимистический вывод о перспективах своего двигателя Феррарис сделал, оценив величину его КПД в точке максимума мощности на валу — ниже 50%. Однако в данной точке это справедливо и для двигателей постоянного тока. Поэтому в дальнейшем рабочие точки стали выбирать ближе к скорости холостого хода, где в идеале КПД любого электродвигателя стремится к 100%.
Рис. 9. Двигатель Теслы
Совершенно по другому пути пошел Тесла, предложив в 1887 г. многофазные системы, где сдвинутые напряжения питания фаз вырабатывались питающим генератором, как показано, например, на рис. 9, где: 1 — генератор, 2 — двухфазный двигатель, 3 — контактные кольца генератора, 4 — обмотка ротора (кольца двигателя не показаны) [5, 10].
При положении переключателя ON ротор запитывается постоянным напряжением, и это двухфазный синхронный двигатель с электромагнитным возбуждением. В положении OFF обмотка ротора закорачивается, и получается асинхронный двигатель, названный Теслой индукционным. Эксперт патентного ведомства поначалу не поверил в работоспособность такого странного двигателя, пока Тесла не продемонстрировал ему действующий макет (рис. 10).
В положении OFF обмотка ротора закорачивается, и получается асинхронный двигатель, названный Теслой индукционным. Эксперт патентного ведомства поначалу не поверил в работоспособность такого странного двигателя, пока Тесла не продемонстрировал ему действующий макет (рис. 10).
Рис. 10. Макет двигателя Теслы
Двигатели Теслы и Феррариса легко запускались от питающей сети, однако с увеличением нагрузки их скорость падала, что подтверждается принципиальным отличием асинхронного двигателя от синхронного. Действительно, асинхронный двигатель развивает вращающий момент лишь при наличии тока, а следовательно, и ЭДС, индуцируемой в роторе. А, по закону Фарадея, это возможно лишь тогда, когда ротор пересекает силовые линии поля статора, т. е. когда скорости их вращения не одинаковы (не синхронны).
Как описано в статье [3], Тесла вместе с Вестингаузом начали активно внедрять асинхронные двигатели в жизнь, однако они были доведены до совершенства и приняли современный вид лишь благодаря трудам нашего соотечественника Михаила Осиповича Доливо-Добровольского, которые будут рассмотрены в следующих статьях.
Что касается многофазных синхронных двигателей, то они нашли широкое применение там, где требуется стабильная скорость вращения, например в компрессорах, приводах генераторов и т. д. Синхронные двигатели с постоянными магнитами входят в состав современных вентильных двигателей, создающих все большую конкуренцию пока еще наиболее распространенным электродвигателям постоянного тока.
Литература
- Микеров А. Г. Первый практически полезный электродвигатель Якоби и его развитие. Control Engineering Россия. 2015. №5 (59).
- Микеров А. Г. Создание прототипов электродвигателей автоматики. Control Engineering Россия. 2016. №1 (61).
- Микеров А. Г. Никола Тесла и передача электроэнергии переменными токами. Control Engineering Россия. 2016. №5 (65).
- Микеров А. Г. Вернер Сименс — основатель европейской электроиндустрии (К 200-летию со дня рождения). Control Engineering Россия. 2016. №6 (66).
- История электротехники / Под ред.
 И. А. Глебова. М.: Изд-во МЭИ. 1999.
И. А. Глебова. М.: Изд-во МЭИ. 1999. - Белькинд Л. Д. и др. История энергетической техники. М.-Л.: Госэнергоиздат. 1960.
- www.britannica.com/biography/Elihu-Thomson
- www.en.wikipedia.org/wiki/Repulsion_motor
- www.edisontechcenter.org/GalileoFerraris.html
- Цверава Г. К. Никола Тесла (1856–1943). Л.: Наука. 1974.
- Штёлтинг Г., Байсее А. Электрические микромашины. М.: Энергоатомиздат. 1991.
Руководство для инженеров по малогабаритным двигателям переменного и постоянного тока
Время прочтения: 6 мин.
Несмотря на то, что электродвигатели используются в самых разных областях, их основная функция остается неизменной — преобразовывать электрическую энергию в механическую. В многочисленных статьях освещаются характеристики каждого уникального двигателя, представленного на рынке, но их можно упростить до двух основных категорий: двигатели переменного тока (переменного тока) и двигатели постоянного тока (постоянного тока).
У каждого типа есть свои плюсы и минусы, и эта статья призвана дать вам четкое представление о том, как двигатель переменного или постоянного тока лучше всего подходит для вашего приложения. Давайте рассмотрим способы, которыми каждый из них преобразует электрическую энергию, различия в их конструкции и лучшие варианты использования для каждого типа.
Мощность
Очевидная разница между двумя типами двигателей заключается в мощности, от которой они работают.
При переменном или переменном токе напряжение меняется на противоположное каждые полпериода, что, в свою очередь, меняет направление тока. Это делается путем чередования полярности на каждом конце провода. Итак, если вы возьмете американский стандарт питания 120 В / 60 Гц, в секунду будет примерно 120 полупериодов.
При постоянном или постоянном токе ток должен оставаться в одном направлении (от положительного к отрицательному), поэтому напряжение должно оставаться постоянным, чтобы поддерживать постоянный ток. Вы можете думать об электричестве постоянного тока как о батарее с четко обозначенными отрицательными и положительными клеммами.
Вы можете думать об электричестве постоянного тока как о батарее с четко обозначенными отрицательными и положительными клеммами.
Электричество переменного тока для двигателей
Внутри провода, использующего электричество переменного тока, электроны не движутся с постоянной скоростью в одном направлении, как при постоянном колыбель).
Переменный ток используется для систем распределения электроэнергии (электроснабжение вашего дома/офиса) по той простой причине, что передача электроэнергии намного эффективнее при более высоких напряжениях, а в прошлом трансформаторы переменного тока значительно превосходили преобразователи постоянного напряжения. Однако достижения в области силовой электроники сделали высоковольтный постоянный ток (HVDC) новой тенденцией. Почему трансформаторы переменного тока предпочтительнее? Поскольку «покачивание» электронов взад-вперед создает электрическое поле, можно использовать трансформатор для повышения напряжения и поддержания относительно низкого тока. 92.
92.
Какое отношение все это имеет к двигателю переменного тока? Ну, в основном, двигатели переменного тока отлично подходят для приложений, требующих небольшой точности, таких как блендер или стиральная машина. Это объекты, которые вам нужно запустить, и они могут увеличивать или уменьшать скорость, но разница между 400 и 420 об/мин, вероятно, не критична.
Электроэнергия постоянного тока для двигателей
Двигатели постоянного тока, с другой стороны, требуют точности и стабильности, поскольку питание этих двигателей постоянным током осуществляется при постоянном напряжении. Электроны внутри провода могут двигаться только в одном направлении, и обычно они делают это с постоянной скоростью.
Опять же, это похоже на то, как батарейка типа АА будет постоянно давать вашей электронике питание 1,5 В (исключая потери) до тех пор, пока она не сдохнет. Это лучше, когда у вас есть чувствительные схемы / печатные платы или электроника, которым требуется постоянный источник энергии для правильной работы, например, ноутбук.
Но подождите, если мой дом питается переменным током, а для моего продукта требуется питание постоянного тока, что мне делать?! Большинство электронных устройств имеют преобразователь переменного тока в постоянный. Это то, что блок на шнуре питания для вашего ноутбука.
На самом деле, вы можете поблагодарить преобразователь на швейной машине за то, что он вдохновил вас на название группы AC/DC. С двигателем постоянного тока вы можете просто контролировать скорость, регулируя напряжение, поскольку скорость пропорциональна напряжению, приложенному к якорю.
Конструкция
Несмотря на то, что принцип работы двигателей переменного и постоянного тока одинаков (одно магнитное поле следует за другим магнитным полем), и их внешний вид может незначительно отличаться, внутри есть некоторые фундаментальные различия, которые делают их уникальными. . Пока вы читаете следующую информацию, имейте в виду, что разница определяется их входом и выходом: двигатели переменного тока потребляют переменное напряжение для повышения эффективности и мощности, а двигатели постоянного тока поддерживают постоянное напряжение для стабильности.
Двигатель переменного тока Конструкция
Двигатели переменного тока очень просты, поскольку всю работу выполняет переменный ток. Подавая ток через стационарную обмотку в кожухе, окружающем вал, вы создаете переменное магнитное поле, которое индуцирует ток на валу или роторе. Это, наоборот, создает магнитное поле, которое постоянно пытается выровняться с магнитным полем стационарной обмотки, в свою очередь заставляя вал вращаться.
Таким образом, их скорость связана с величиной проскальзывания или отставания их магнитных полей, пытающихся наверстать упущенное, что определяется конструкцией двигателя.
Помните, что электричество переменного тока переходит от «положительного напряжения» к 0 и к «отрицательному напряжению» с удвоенной частотой (Гц) каждую секунду. Это означает, что при стандарте США 60 Гц ток меняет направление 120 раз в секунду.
Простота двигателей переменного тока делает их долговечными и значительно снижает вероятность механической ошибки. Однако их пусковые токи обычно в шесть-девять раз превышают ток в установившемся режиме. Сочетание эффективности и длительного срока годности делает их популярными для приложений, где вы не хотите слишком больших потерь энергии и не хотите постоянно заменять двигатель (например, стиральные машины). Тем не менее, я настолько зависим от своей стиральной машины, что, вероятно, буду платить каждый год за новую, если она сломается — не говорите LG!
Однако их пусковые токи обычно в шесть-девять раз превышают ток в установившемся режиме. Сочетание эффективности и длительного срока годности делает их популярными для приложений, где вы не хотите слишком больших потерь энергии и не хотите постоянно заменять двигатель (например, стиральные машины). Тем не менее, я настолько зависим от своей стиральной машины, что, вероятно, буду платить каждый год за новую, если она сломается — не говорите LG!
Конструкция двигателя постоянного тока
Поскольку двигателям неизбежно требуется вращающееся магнитное поле, а постоянный ток создает постоянное магнитное поле, их конструкция немного сложнее. Возвращаясь к примеру с батареей, который мы использовали ранее, мы хотим, чтобы батарея снабжала нашу печатную плату стабильным напряжением 1,5 В вместо безумного переключения с +1,5 на -1,5 В сотни раз в секунду, которое дает нам питание переменного тока. Таким же образом, чтобы двигатель постоянного тока мог преобразовывать подаваемое на него постоянное напряжение, нам нужна конструкция двигателя, которая будет точно преобразовывать это напряжение в механическую энергию.
Для этого нам нужно сначала реализовать некоторые механические функции для создания вращающегося магнитного поля, которое приводит в движение двигатель. Опять же, это было легко с двигателями переменного тока, потому что мощность переменного тока естественным образом колеблется взад и вперед, что изменяет магнитное поле. При постоянном токе магнитное поле останется прежним.
Итак, чтобы противостоять, у нас есть несколько вращающихся катушек в центре двигателя постоянного тока, которые подключены к «коммутатору». Коммутатор контактирует со стационарными «щетками» противоположной полярности именно в тот момент, когда ему необходимо изменить направление тока для вращения вала.
Это может быть очевидно, но основным недостатком здесь является потеря эффективности из-за трения, вызванного контактом между коллектором и щетками. Потеря эффективности уходит в виде тепла, а иногда и искр при перегрузке мотора.
Функция
Если вам надоело читать все технические детали и вы просто заботитесь о том, какой двигатель лучше всего подходит для ваших нужд, краткий ответ заключается в том, что все сводится к вашему конкретному применению. В качестве краткого ответа, вот основной список плюсов и минусов для каждого типа двигателя:
В качестве краткого ответа, вот основной список плюсов и минусов для каждого типа двигателя:
Преимущества двигателей переменного тока
- Обычно более эффективны
- Увеличенный срок службы и меньшая вероятность отказа
- Вырабатывает меньше тепла
- Лучше подходит для устройств с высокой мощностью (стиральные машины, холодильники, машины)
- Может подключаться непосредственно к домашней или офисной розетке, без переходника
Недостатки двигателей переменного тока
- Высокий пусковой ток
- Несколько громоздкий
- Непрактично для портативных приложений
- Преимущества двигателей постоянного тока
- Низкий уровень электромагнитных помех (отлично подходит для чувствительных электронных устройств)
- Стабильность для печатных плат и чувствительной электроники
- Вы можете использовать продукт от батареи
- Лучшее управление скоростью
Недостатки двигателей постоянного тока
- Обычно дороже
- Менее эффективный
- Более высокая вероятность отказа (щеточный тип)
Основные выводы
На самом деле, в вашей конструкции, скорее всего, будет несколько факторов, которые будут управлять выбранным вами типом двигателя.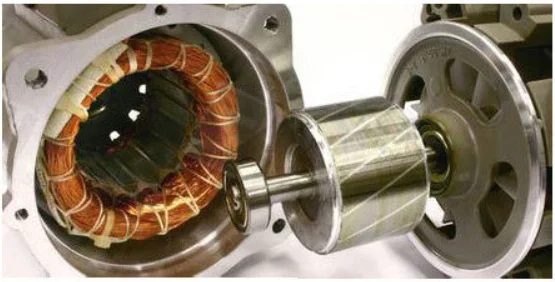 Если вы используете печатные платы, батареи и вам требуется точная настройка регуляторов скорости, вам подойдет двигатель постоянного тока. Если вы стремитесь к высокой мощности, эффективности, долговечности и можете подключить свой продукт к настенной розетке, двигатель переменного тока поможет вам.
Если вы используете печатные платы, батареи и вам требуется точная настройка регуляторов скорости, вам подойдет двигатель постоянного тока. Если вы стремитесь к высокой мощности, эффективности, долговечности и можете подключить свой продукт к настенной розетке, двигатель переменного тока поможет вам.
Замена двигателей постоянного тока? Think AC
Двигатели переменного тока (AC) и постоянного тока (DC) традиционно использовались для совершенно разных применений из-за их конструкции и присущих им рабочих характеристик. В целом двигатели переменного тока были меньше, дешевле, легче и прочнее, чем двигатели постоянного тока. С другой стороны, двигатели постоянного тока лучше работали в приложениях с регулируемой скоростью, особенно в тех, которые требуют широкого диапазона скоростей, и обеспечивали более точное управление скоростью.
Двигатели постоянного тока являются промышленными рабочими лошадками во многих областях применения, где требуется работа с регулируемой скоростью. В этих приложениях двигатели постоянного тока надежны и обеспечивают точное регулирование скорости в различных условиях эксплуатации. Однако двигатели постоянного тока дороги в покупке и обслуживании. Кроме того, за последние 10 лет приводы переменного тока улучшились до такой степени, что их управление скоростью стало намного точнее, чем у сервоприводов. Более того, двигатель переменного тока и привод вместе стоят примерно столько же, сколько и двигатель постоянного тока.
В этих приложениях двигатели постоянного тока надежны и обеспечивают точное регулирование скорости в различных условиях эксплуатации. Однако двигатели постоянного тока дороги в покупке и обслуживании. Кроме того, за последние 10 лет приводы переменного тока улучшились до такой степени, что их управление скоростью стало намного точнее, чем у сервоприводов. Более того, двигатель переменного тока и привод вместе стоят примерно столько же, сколько и двигатель постоянного тока.
Разработка современных двигателей переменного тока и приводов стирает различия, которые когда-то определяли выбор между приводами переменного и постоянного тока. В результате недорогие и более надежные приводы переменного тока перемещаются в приложения, ранее предназначенные для приводов постоянного тока.
Фото0 1. Типовой блок двигателя переменного тока и привода.
ПОДЪЕМ ПРИВОДОВ ПЕРЕМЕННОГО ТОКА
Приводы переменного тока используют полупроводниковый преобразователь частоты с регулируемой частотой, который регулирует частоту и напряжение для изменения скорости двигателя переменного тока с фиксированной скоростью. Это управление обычно осуществляется посредством широтно-импульсной модуляции (ШИМ) выхода привода на двигатель. Напряжение и частота поддерживаются в постоянном соотношении при любой скорости двигателя (известном как отношение напряжения к частоте).
Это управление обычно осуществляется посредством широтно-импульсной модуляции (ШИМ) выхода привода на двигатель. Напряжение и частота поддерживаются в постоянном соотношении при любой скорости двигателя (известном как отношение напряжения к частоте).
Преобразователи частоты предпочтительнее использовать, если среда двигателя коррозионно-активна, потенциально взрывоопасна, опасна или влажна и требует специальных корпусов (взрывозащищенных, водонепроницаемых и т. д.). Преобразователи переменного тока также являются хорошим выбором, когда двигатели требуют минимального обслуживания, либо из-за их недоступности, либо из-за плохой практики обслуживания предприятия.
Приводы переменного тока обычно меньше и легче приводов постоянного тока при заданном крутящем моменте и выходной скорости, и они способны развивать скорость до 10 000 об/мин. Кроме того, один привод переменного тока может управлять несколькими двигателями.
Современные двигатели и приводы переменного тока обеспечивают ряд дополнительных эксплуатационных преимуществ, которые могут конкурировать с теми, которые традиционно доступны только для приводов постоянного тока. Например, современные приводы теперь могут создавать полный крутящий момент при запуске, что раньше было невозможно. Они также могут работать в диапазоне скоростей 1000:1 по сравнению только с 10:1 у предыдущих приводов переменного тока.
Например, современные приводы теперь могут создавать полный крутящий момент при запуске, что раньше было невозможно. Они также могут работать в диапазоне скоростей 1000:1 по сравнению только с 10:1 у предыдущих приводов переменного тока.
Приводы переменного тока с регулируемой скоростью также могут приспосабливаться к быстро меняющимся нагрузкам и обеспечивают жесткое регулирование скорости. При работе в системах с замкнутым контуром приводы переменного тока могут регулировать скорость с точностью до 0,01 процента и менее. Это делает их подходящими для применений, требующих высокой динамической реакции, таких как ленточные процессы, сортировочные конвейеры для обработки материалов, насосы-дозаторы, экструдеры и испытательные стенды. В таблице на следующей странице сравниваются возможности стандартных приводов постоянного тока и современных приводов переменного тока с регулируемой скоростью.
Улучшенная технология управления является причиной значительного улучшения характеристик привода переменного тока. Сегодняшние инверторы меньше, дешевле и предоставляют больше возможностей, чем несколько лет назад.
Сегодняшние инверторы меньше, дешевле и предоставляют больше возможностей, чем несколько лет назад.
Хотя двигатели переменного тока уже некоторое время способны работать в огромных диапазонах скоростей, доступные приводы не могут соответствовать их производительности. Теперь приводы переменного тока могут обеспечивать производительность, близкую к сервоприводу, в компактном корпусе по разумной цене.
Фото 2. Двигатели переменного тока позволяют значительно сократить расходы по сравнению с двигателями постоянного тока.
ЭФФЕКТЫ РЕГУЛИРОВАНИЯ СКОРОСТИ
Двигатели переменного тока традиционно работали с фиксированной частотой и скоростью. На такой скорости встроенная система охлаждения удерживает мотор от перегрева. Работа асинхронного двигателя в качестве двигателя с регулируемой скоростью увеличивает рабочую температуру и создает повышенную нагрузку на систему изоляции. Более высокие температуры являются результатом увеличения потерь в двигателе и снижения теплопередачи. В результате многие двигатели с фиксированной частотой со стандартным КПД не будут обеспечивать номинальные характеристики, указанные на паспортной табличке, при работе с регулятором частоты. Повышенные температуры не могут привести к немедленному повреждению изоляции; однако они значительно сократят жизнь.
В результате многие двигатели с фиксированной частотой со стандартным КПД не будут обеспечивать номинальные характеристики, указанные на паспортной табличке, при работе с регулятором частоты. Повышенные температуры не могут привести к немедленному повреждению изоляции; однако они значительно сократят жизнь.
В большинстве изоляционных систем увеличение рабочей температуры на 10 градусов Цельсия сокращает ожидаемый срок службы на 50 процентов. Это одна из причин, по которой для работы с преобразователями частоты часто рекомендуются энергоэффективные или высокоэффективные двигатели, которые работают при более низких температурах в тех же условиях эксплуатации. Еще одна причина того, что двигатели с регулируемой частотой, управляемые приводом, с фиксированной частотой работают при более высоких температурах, заключается в том, что охлаждающий вентилятор работает непосредственно с вала двигателя. Таким образом, при изменении скорости двигателя изменяется и скорость вращения вентилятора, что приводит к более низкому охлаждению на более низких скоростях.
При работе в качестве устройств с регулируемой скоростью охлаждение двигателя будет снижено на более низких скоростях. В таких случаях двигатель должен быть специально разработан для работы с переменной скоростью. Двигатели переменного тока с регулируемой скоростью обычно указывают свой диапазон скоростей. Если вы используете двигатель в указанном диапазоне скоростей, перегрев не должен быть проблемой.
В этой таблице сравниваются возможности стандартных приводов постоянного тока с возможностями современных приводов переменного тока с регулируемой скоростью.
ДРУГИЕ СООБРАЖЕНИЯ
Когда требования к производительности системы минимальны, стандартный асинхронный двигатель часто можно успешно применять в устройствах с регулируемой частотой и переменной скоростью. Однако, когда требования к производительности более строгие, необходимо использовать энергоэффективный, высокоэффективный двигатель или двигатель определенного назначения с инверторным номиналом. Это особенно верно, когда требуется максимальная производительность.
Это особенно верно, когда требуется максимальная производительность.
Хотя определение высокой производительности является неопределенным, такие приложения обычно характеризуются одним или несколькими из следующих факторов:
-
Непрерывный постоянный крутящий момент требуется ниже 50 процентов от базовой скорости.
-
Непрерывная, постоянная мощность, необходимая для скорости выше 150 процентов от базовой скорости.
-
Высокие пусковые нагрузки или перегрузки.
-
Высокие динамические характеристики.
-
Процесс, который невозможно запустить или запустить без управления переменной скоростью.
Некоторые двигатели переменного тока специально разработаны для работы от сети переменного тока и могут обеспечивать непрерывный постоянный крутящий момент вплоть до нулевой скорости (диапазон 1000:1). Эти конструкции доступны в традиционных полностью закрытых корпусах с вентиляторным охлаждением (TEFC) с рейтингом Национальной ассоциации производителей электрооборудования (NEMA) или в конструкциях с очень высокой плотностью мощности, которые похожи на традиционные блоки постоянного тока с квадратным корпусом. Эти конструкции с высокой плотностью мощности охлаждаются вспомогательным вентилятором (с принудительной вентиляцией или охлаждением с помощью вентилятора) или полностью закрытой конструкцией с вентиляторным охлаждением, в которой вентилятор отсутствует.
Эти конструкции с высокой плотностью мощности охлаждаются вспомогательным вентилятором (с принудительной вентиляцией или охлаждением с помощью вентилятора) или полностью закрытой конструкцией с вентиляторным охлаждением, в которой вентилятор отсутствует.
При более высокой номинальной мощности эти мощные конструкции с воздушным охлаждением обеспечивают значительную экономию средств по сравнению с традиционными двигателями с фиксированной скоростью. Кроме того, двигатели, разработанные специально для инверторных высокопроизводительных приложений, имеют более широкий диапазон скоростей, обладают более высокой перегрузочной способностью и включают тепловую защиту и возможность монтажа устройств регулирования скорости.
Тед Стернс (Ted Stearns) — менеджер по продукту в Applied Industrial Technologies, североамериканском дистрибьюторе запчастей, критически важных для работы заказчиков по техобслуживанию и OEM. На своей нынешней должности Stearns занимается редуктором, мотор-редуктором, компонентами конвейеров и конвейерным оборудованием.
