Что такое электромагнит постоянного тока. Как классифицируются электромагниты. Из каких основных частей состоит электромагнит. Как работает электромагнит постоянного тока. Какие существуют виды электромагнитов по конструкции.
Что такое электромагнит постоянного тока
Электромагнит постоянного тока — это электромеханическое устройство, предназначенное для создания магнитного поля при протекании через его обмотку постоянного электрического тока. Он состоит из ферромагнитного сердечника и намотанной на него катушки с изолированным проводом.
Основное назначение электромагнитов постоянного тока:
- Преобразование электрической энергии в механическую работу
- Создание управляемого магнитного поля
- Притяжение ферромагнитных предметов
- Приведение в действие различных механизмов
Классификация электромагнитов постоянного тока
Электромагниты постоянного тока классифицируются по следующим основным признакам:
По назначению:
- Приводные — для выполнения механической работы
- Удерживающие — для удержания ферромагнитных деталей
По скорости срабатывания:
- Быстродействующие
- Нормальные
- Замедленного действия
По конструкции магнитопровода:
- С разомкнутым магнитопроводом
- С замкнутым магнитопроводом
По форме магнитопровода:
- П-образные
- Ш-образные
- Цилиндрические
Основные части электромагнита постоянного тока
Несмотря на большое разнообразие конструкций, любой электромагнит постоянного тока содержит следующие основные части:

- Катушка с намоткой из изолированного провода
- Якорь (подвижная часть магнитопровода)
- Неподвижная часть магнитопровода:
- Сердечник
- Ярмо
- Воздушный зазор между якорем и неподвижной частью
- Крепежные и фиксирующие детали
- Корпус
Принцип работы электромагнита постоянного тока
Принцип действия электромагнита постоянного тока основан на возникновении магнитного поля при протекании электрического тока по обмотке. Рассмотрим основные этапы работы:
- При подаче тока в обмотку создается магнитное поле
- Магнитное поле усиливается ферромагнитным сердечником
- Возникает сила притяжения между якорем и неподвижной частью
- Якорь начинает движение, преодолевая противодействующие силы
- При достижении конечного положения якорь останавливается
- После отключения тока якорь возвращается в исходное положение под действием возвратной пружины
Конструктивные особенности электромагнитов постоянного тока
По конструктивному исполнению различают следующие виды электромагнитов постоянного тока:
Клапанные (поворотные) электромагниты
- Имеют небольшой ход якоря (несколько миллиметров)
- Развивают большое тяговое усилие
- Якорь совершает поворотное движение
Прямоходовые электромагниты
- Имеют большой ход якоря
- Обладают более высоким быстродействием
- Якорь движется поступательно
- Часто выполняются в виде соленоида
Электромагниты с поперечным движением
- Якорь движется перпендикулярно оси катушки
- Позволяют получить большие перемещения
- Имеют меньшую силу тяги
Материалы для изготовления электромагнитов постоянного тока
При изготовлении электромагнитов постоянного тока используются следующие материалы:
Для магнитопровода:
- Магнитомягкие конструкционные стали
- Низкоуглеродистые электротехнические стали
- Пермаллои (для высокочувствительных электромагнитов)
Для обмотки:
- Медный изолированный провод
- Алюминиевый провод (реже)
Для каркаса катушки:
- Текстолит
- Гетинакс
- Пластмассы
Области применения электромагнитов постоянного тока
Электромагниты постоянного тока широко применяются в различных отраслях промышленности и техники:
- Электрические аппараты (реле, контакторы, пускатели)
- Системы автоматики и управления
- Подъемно-транспортные механизмы
- Запорная и регулирующая арматура
- Электромагнитные муфты и тормоза
- Измерительные приборы
- Медицинская техника
Преимущества и недостатки электромагнитов постоянного тока
Рассмотрим основные достоинства и недостатки электромагнитов постоянного тока по сравнению с другими типами приводов:
Преимущества:
- Простота конструкции
- Высокая надежность
- Большие тяговые усилия
- Возможность дистанционного управления
- Высокое быстродействие
Недостатки:
- Ограниченный ход якоря
- Нелинейная тяговая характеристика
- Относительно низкий КПД
- Повышенное тепловыделение
Особенности расчета электромагнитов постоянного тока
При проектировании электромагнитов постоянного тока необходимо учитывать следующие основные факторы:

- Требуемое тяговое усилие
- Ход якоря
- Напряжение питания
- Режим работы (длительный, кратковременный, повторно-кратковременный)
- Условия эксплуатации
- Требования к быстродействию
- Ограничения по габаритам и массе
Основные этапы расчета электромагнита постоянного тока:
- Выбор конструкции и типа электромагнита
- Определение оптимальной индукции в воздушном зазоре
- Расчет сечения магнитопровода
- Определение размеров катушки
- Расчет обмоточных данных (число витков, диаметр провода)
- Проверочные расчеты (нагрев, быстродействие и т.д.)
Сравнение электромагнитов постоянного и переменного тока
Электромагниты постоянного и переменного тока имеют ряд существенных отличий:
| Характеристика | Электромагниты постоянного тока | Электромагниты переменного тока |
|---|---|---|
| Тяговое усилие | Больше при одинаковых габаритах | Меньше примерно в 2 раза |
| Конструкция магнитопровода | Сплошной | Шихтованный |
| Потери в магнитопроводе | Отсутствуют | Значительные (на вихревые токи и гистерезис) |
| Форма тяговой характеристики | Нелинейная | Более равномерная |
| Быстродействие | Выше | Ниже |
Перспективы развития электромагнитов постоянного тока
Основные направления совершенствования электромагнитов постоянного тока:

- Применение новых магнитных материалов с улучшенными характеристиками
- Оптимизация конструкции с помощью компьютерного моделирования
- Разработка интеллектуальных систем управления
- Интеграция с микропроцессорными устройствами
- Создание компактных высокоэффективных конструкций
- Повышение энергоэффективности и снижение тепловыделения
Таким образом, электромагниты постоянного тока остаются востребованными электромеханическими устройствами благодаря простоте, надежности и широким возможностям применения. Дальнейшее их совершенствование позволит расширить области использования и улучшить эксплуатационные характеристики.
Классификация и принцип работы электромагнитов
Существуют определенные природные материалы и объекты, которые сами по себе обладают магнитными свойствами. Их называют естественными магнитами. Примерами естественного магнитного материала могут служить железные руды, насыщенные магнитными свойствами. Примером же естественного магнитного объекта выступает наша с вами планета Земля.
Естественные, они же постоянные, магниты обладают высокой остаточной магнитной индукцией, что позволяет им сохранять магнитные свойства на протяжении длительного времени.
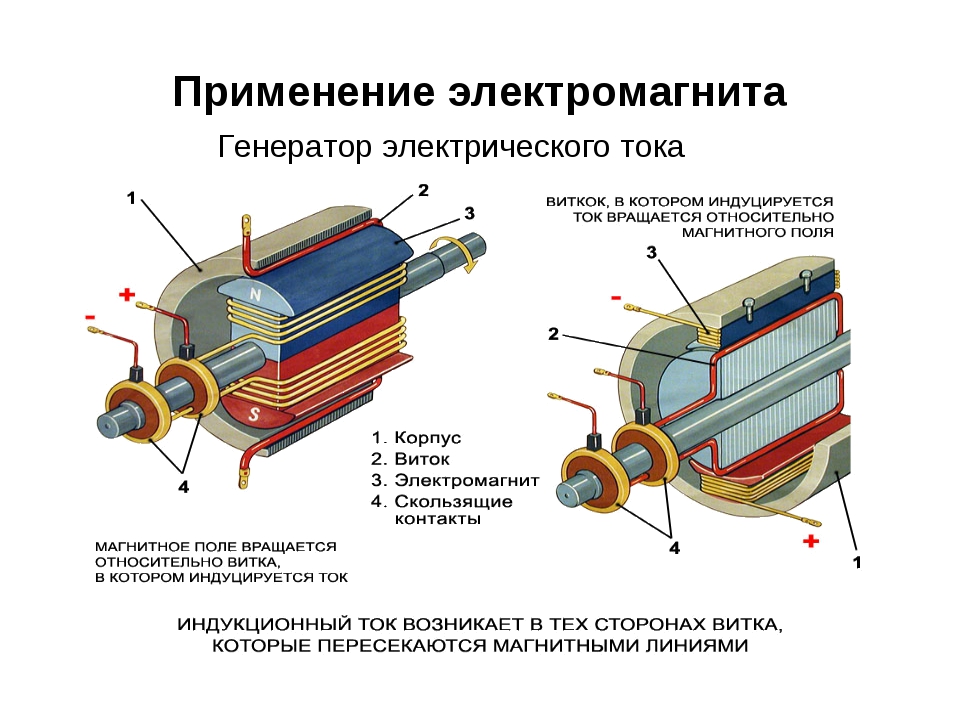
Однако, более широкое распространение в промышленности, медицине и других отраслях нашли электромагниты — электрические аппараты, в которых магнитным полем можно управлять. В электроэнергетике применяются, кроме прочего, в реле, выключателях, генераторах.
При определенных условиях магнитные поля способны создавать поля электрические. Верно и обратное утверждение. В этом и кроется суть электромагнитов.
Классификация электромагнитов
Принято классифицировать электромагниты (ЭМ) по способу питания на электромагниты постоянного и переменного тока. ЭМ постоянного тока в свою очередь классифицируются на постоянного тока нейтральные и поляризованные. Также существуют ЭМ выпрямленного тока.
В нейтральных электромагнитах постоянного тока магнитный поток создается обмоткой постоянного тока. Величина магнитного потока зависит лишь от обмотки, не зависит от направления. Если величина тока равна нулю, то магнитный поток и сила притяжения также опускаются практически до величины нуля.
Поляризованные ЭМ постоянного тока характеризуются наличием двух независимых магнитных потоков — рабочего и поляризующего. Поляризующий поток создается постоянными магнитами или электромагнитами. Рабочий же поток создается под действием намагничивающей силы рабочей обмотки. При отсутствии тока на якорь магнита будет действовать сила притяжения от поляризующего потока. В отличие от нейтральных, в поляризованных электромагнитах их действие зависит не только от величины рабочего потока но и от его направления.
В электромагнитах переменного тока обмотка питается от источника переменного тока. Величина и направление магнитного потока изменяется во времени от нуля до максимума.
Далее другие возможные классификации
- с последовательными (мало витков большого сечения) и параллельными (много витков малого сечения) обмотками
- работающие в длительном, кратковременном или прерывистом режимах
- быстродействующие, замедленно действующие и нормально действующие
- с внешним притягивающим якорем, со втягивающимся якорем, с внешним поперечно движущимся якорем
Устройство электромагнитов
Несмотря на обширное, судя по описанной выше классификации, количество разнообразных вариантов электромагнитов, существуют определенные однотипные узлы, которые встречаются у всех ЭМ.
- Катушка с расположенной на ней намагничивающей обмоткой
- Подвижная часть электромагнита — якорь
- Неподвижная часть — ярмо и сердечник
Между якорем и неподвижными частями существуют воздушные промежутки.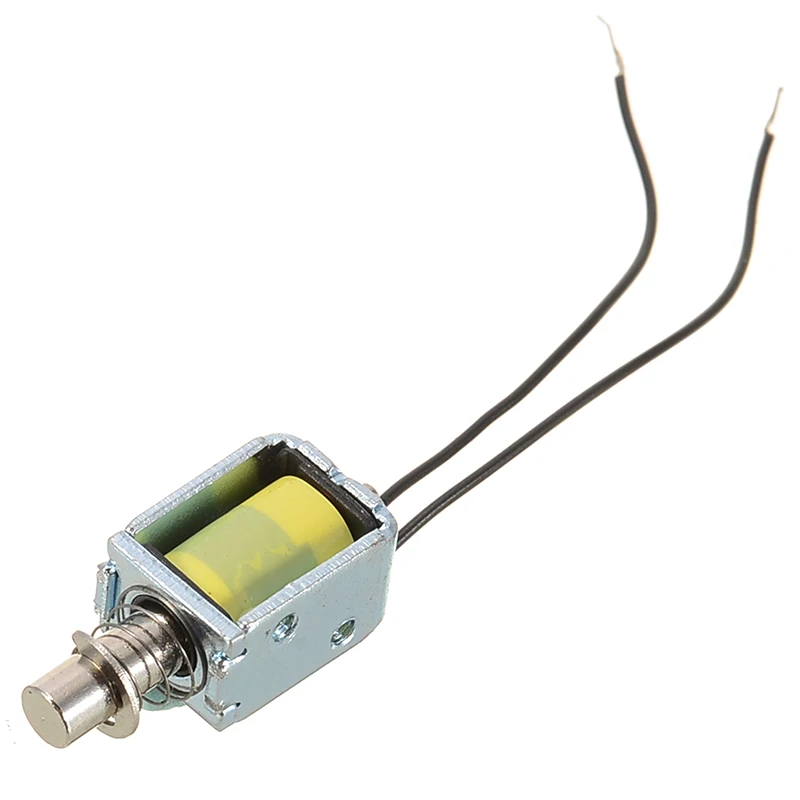
Также существует понятие полюса. Полюсами называют поверхности магнитопровода, которые ограничивают полезный воздушный промежуток.
Конструктивные формы электромагнитов переменного тока не имеют множества вариантов, за счет того, что сердечник набирается из листов электротехнической стали. Это необходимо для борьбы с вихревыми токами.
Как работает электромагнит
Сам цикл работы ЭМ представляет собой следующую последовательность действий. Сначала в обмотку подается ток такой величины, при которой магнитные силы станут больше, чем силы удерживающие якорь в покое.
Далее произойдет отрыв якоря из состояния покоя и движение якоря в конечную точку полезного промежутка. Это первый этап.
На втором этапе якорь ЭМ подтянут и через него протекает ток. Как известно, ток создает термическое воздействие с течением времени. Поэтому время работы не должно превышать допустимое. На этом этапе сила тяги электромагнита максимальная.
Поэтому время работы не должно превышать допустимое. На этом этапе сила тяги электромагнита максимальная.
Последний, Третий этап — аналогичен первому — ток уменьшается до нуля, магнитные силы становятся меньше сил, возвращающих якорь в состояние покоя, якорь отпадает. Далее электромагнит остывает.
Если характер его работы периодически повторяющийся, то за время до следующего цикла, ему необходимо успеть остыть.
Сравнение ЭМ постоянного и переменного тока
При выборе между электромагнитами на постоянном или переменном токе следует учитывать следующие особенности:
- Сила тяги. При одинаковом сечении полюсов средняя величина силы тяги в ЭМ на переменном токе (“ЭМ ~ тока”) будет вдвое меньше, чем в аналогичном на постоянном токе. То есть железо более эффективно используется в ЭМ на постоянном токе (“ЭМ = тока”)
- Вес. Если же заданными константами являются сила тяги и ход якоря, то для получения электромагнита переменного тока потребуется вдвое больше железа и размеров, чем для ЭМ постоянного тока
- Реактивная мощность.
 Если необходимо уменьшить потребляемую мощность “ЭМ = тока”, то достаточно увеличить его размеры. В случае же с “ЭМ ~ тока” потребляемая при пуске реактивная мощность не может быть уменьшена путем увеличения размеров ЭМ
Если необходимо уменьшить потребляемую мощность “ЭМ = тока”, то достаточно увеличить его размеры. В случае же с “ЭМ ~ тока” потребляемая при пуске реактивная мощность не может быть уменьшена путем увеличения размеров ЭМ - Вихревые токи. В случае с “ЭМ ~ тока” магнитопроводы выполняют шихтованными и разрезными для уменьшения влияния вихревых токов. Само же наличие потерь на вихревые токи и перемагничивание вызывает увеличение потребления электроэнергии и лишний нагрев. В случае же с “ЭМ = тока” данный пункт отсутствует
- Быстродействие. Если взять ЭМ постоянного и переменного тока, то вторые будут более быстродействующие. Однако для “ЭМ = тока” внедряют специальные меры, которые могут сделать их более быстродействующими. При этом “ЭМ = тока” будут потреблять меньше энергии
Однако, в промышленности, вышеописанные недостатки “ЭМ ~ тока” не вызывают особых препятствий на пути их использования.
Сохраните в закладки или поделитесь с друзьями
Самое популярное
электромагнит постоянного тока — с русского на все языки
Все языкиАбхазскийАдыгейскийАфрикаансАйнский языкАканАлтайскийАрагонскийАрабскийАстурийскийАймараАзербайджанскийБашкирскийБагобоБелорусскийБолгарскийТибетскийБурятскийКаталанскийЧеченскийШорскийЧерокиШайенскогоКриЧешскийКрымскотатарскийЦерковнославянский (Старославянский)ЧувашскийВаллийскийДатскийНемецкийДолганскийГреческийАнглийскийЭсперантоИспанскийЭстонскийБаскскийЭвенкийскийПерсидскийФинскийФарерскийФранцузскийИрландскийГэльскийГуараниКлингонскийЭльзасскийИвритХиндиХорватскийВерхнелужицкийГаитянскийВенгерскийАрмянскийИндонезийскийИнупиакИнгушскийИсландскийИтальянскийЯпонскийГрузинскийКарачаевскийЧеркесскийКазахскийКхмерскийКорейскийКумыкскийКурдскийКомиКиргизскийЛатинскийЛюксембургскийСефардскийЛингалаЛитовскийЛатышскийМаньчжурскийМикенскийМокшанскийМаориМарийскийМакедонскийКомиМонгольскийМалайскийМайяЭрзянскийНидерландскийНорвежскийНауатльОрокскийНогайскийОсетинскийОсманскийПенджабскийПалиПольскийПапьяментоДревнерусский языкПортугальскийКечуаКвеньяРумынский, МолдавскийАрумынскийРусскийСанскритСеверносаамскийЯкутскийСловацкийСловенскийАлбанскийСербскийШведскийСуахилиШумерскийСилезскийТофаларскийТаджикскийТайскийТуркменскийТагальскийТурецкийТатарскийТувинскийТвиУдмурдскийУйгурскийУкраинскийУрдуУрумскийУзбекскийВьетнамскийВепсскийВарайскийЮпийскийИдишЙорубаКитайский
Все языкиАнглийскийНемецкийНорвежскийКитайскийИвритФранцузскийУкраинскийИтальянскийПортугальскийВенгерскийТурецкийПольскийДатскийЛатинскийИспанскийСловенскийГреческийЛатышскийФинскийПерсидскийНидерландскийШведскийЯпонскийЭстонскийТаджикскийАрабскийКазахскийТатарскийЧеченскийКарачаевскийСловацкийБелорусскийЧешскийАрмянскийАзербайджанскийУзбекскийШорскийРусскийЭсперантоКрымскотатарскийСуахилиЛитовскийТайскийОсетинскийАдыгейскийЯкутскийАйнский языкЦерковнославянский (Старославянский)ИсландскийИндонезийскийАварскийМонгольскийИдишИнгушскийЭрзянскийКорейскийИжорскийМарийскийМокшанскийУдмурдскийВодскийВепсскийАлтайскийЧувашскийКумыкскийТуркменскийУйгурскийУрумскийЭвенкийскийБашкирскийБаскский
21. Электромагнитные исполнительные устройства » СтудИзба
Электромагнитные исполнительные устройства » СтудИзба
Глава 21
ЭЛЕКТРОМАГНИТНЫЕ ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА
§ 21.1. Назначение электромагнитных исполнительных устройств
Исполнительные устройства в системах автоматики предназначены для приведения в действие (т. е. для привода) различных регулирующих органов, оказывающих непосредственное воздействие на объект управления с целью достижения выходной величиной этого объекта требуемого значения. Существует большое разнообразие регулирующих органов: для изменения подачи жидкостей и газов в трубопроводах устанавливаются заслонки, клапаны, шиберы и краны; в подъемно-транспортных устройствах это различные контакторы, муфты, тормоза, вариаторы скорости; в осветительных и нагревательных электроустановках это различные коммутационные аппараты.
Для воздействия па регулирующие органы необходимо выполнить механическую работу: повернуть заслонку или крап, соединить две половинки муфты, переместить шестерню на валу коробки передач, замкнуть контакты и т. д. Входным сигналом исполнительного устройства в электрических системах автоматики является электрический ток или напряжение, а выходным сигналом — механическое перемещение.
д. Входным сигналом исполнительного устройства в электрических системах автоматики является электрический ток или напряжение, а выходным сигналом — механическое перемещение.
Для преобразования электрической энергии в механическую служат электромагниты и электродвигатели. В данной главе будут рассмотрены только электромагнитные исполнительные устройства. Электродвигатели являются электрическими машинами и изучаются в соответствующем курсе. Следует отметить, что почти всегда, когда ставится вопрос о разработке привода для регулирующего органа, приходится делать выбор между двумя вариантами: электромагнит или электродвигатель. Основное преимущество электромагнита — простота конструкции. У электродвигателя достоинств больше: высокий КПД, возможность получения любых скоростей и перемещений. Однако эти преимущества проявляются только в сравнительно сложных системах автоматики и при продолжительном режиме работы. При необходимости иметь небольшие перемещения (несколько миллиметров) и усилия (несколько десятков—сотен ньютон) электромагниты выгоднее, чем электродвигатель с редуктором.
В предыдущих главах уже рассматривались электромагниты, используемые как составная часть электромагнитных реле и контакторов. В данной главе будут рассмотрены общие вопросы классификации электромагнитов, их расчета, конструирования, применения в качестве исполнительных элементов систем автоматики.
§ 21.2. Классификация электромагнитов
В зависимости от вида тока в обмотке электромагниты подразделяют на электромагниты постоянного и переменного токов, по скорости срабатывания — на быстродействующие, нормальные и замедленного действия. По назначению электромагниты разделяют на приводные и удерживающие.
Приводные электромагниты служат для выполнения механической работы. При подаче питания они перемещают различные исполнительные устройства: клапаны, толкатели, заслонки, золотники, железнодорожные стрелки. Они перемещают контакты реле и контакторов, печатающие и перфорирующие устройства. Для выполнения этой работы электромагниты должны быть рассчитаны на определенную силу и перемещение.
Удерживающие электромагниты служат не для перемещения, а лишь для удерживания ферромагнитных деталей. Например, электромагнит, используемый при подъеме железного металлолома, только удерживает его, а перемещение осуществляется подъемным крапом. В этом случае, электромагнит выполняет лишь роль крюка подъемного крана. В металлообработке используются электромагнитные плиты для фиксации обрабатываемой детали на станке. Известны также электромагнитные замки. Поскольку удерживающие электромагниты не совершают работы, они рассчитываются лишь на определенное усилие. В некоторых случаях электромагнит имеет две катушки: одна, более мощная, используется для перемещения якоря, а другая — лишь для удерживания якоря в притянутом положении.
Велико разнообразие электромагнитов специального назначения. Они используются для фокусировки электронных пучков в телевидении, в ускорителях элементарных частиц, в разнообразных измерительных приборах, в медицинской аппаратуре и т. д.
д.
По конструктивному выполнению различают клапанные (поворотные), прямоходовые и электромагниты с поперечным движением. Клапанные электромагниты имеют» небольшое перемещение якоря (несколько миллиметров) и развивают большое тяговое усилие.
Прямоходовые электромагниты имеют большой ход якоря и большее быстродействие; по размерам они меньше, чем клапанные. Часто они представляют собой соленоид (цилиндрическую катушку, втягивающую в себя ферромагнитный стержень), поэтому их иногда называют соленоидными электромагнитами.
Рис. 21.1. Варианты конструктивных схем электромагнитов
Различные конструкции электромагнитов показаны на рис. 21.1. Несмотря на большое их многообразие (далеко не все возможные конструкции показаны на этом рисунке), все они состоят из катушки 1, якоря (подвижного магнитопровода) 2, неподвижного магнитопровода (сердечника 3 и ярма 4). Кроме того, они имеют различные пружины, крепежные, фиксирующие и передающие детали, корпус. По конструкции магнитной цепи различают электромагниты с разомкнутым (рис. 21.1, г, е) и замкнутым магнитопроводом (рис. 21.1, а, б, в, д, ж, з). По форме магнитопровода различают электромагниты с П-образным, Ш-образным и цилиндрическим магнитопроводом.
Кроме того, они имеют различные пружины, крепежные, фиксирующие и передающие детали, корпус. По конструкции магнитной цепи различают электромагниты с разомкнутым (рис. 21.1, г, е) и замкнутым магнитопроводом (рис. 21.1, а, б, в, д, ж, з). По форме магнитопровода различают электромагниты с П-образным, Ш-образным и цилиндрическим магнитопроводом.
Магнитопроводы электромагнитов постоянного тока обычно выполняются сплошными из магнитомягких материалов: обычных конструкционных сталей и низкоуглеродистых электротехнических сталей. Высокочувствительные электромагниты имеют магнитопровод из пермаллоев (сплавов железа с никелем и кобальтом). В быстродействующих электромагнитах стремятся к уменьшению вихревых токов, для чего используют электротехнические кремнистые стали с повышенным электрическим сопротивлением и шихтованный (наборный) магнитопровод.
Для уменьшения потерь на вихревые токи магнитопровод электромагнитов переменного тока собирают (шихтуют) из изолированных пластин толщиной 0,35 или 0,5 мм. В качестве материала используются горячекатаные и холоднокатаные электротехнические стали. Отдельные части магнитопровода, которые трудно выполнить шихтованными, изготовляют из сплошного материала толщиной 2—3 мм.
В качестве материала используются горячекатаные и холоднокатаные электротехнические стали. Отдельные части магнитопровода, которые трудно выполнить шихтованными, изготовляют из сплошного материала толщиной 2—3 мм.
Катушки электромагнитов по своей конструкции бывают каркасные и бескаркасные, а по форме сечения — круглые и прямоугольные. Провод каркасной катушки наматывают па каркас из изоляционного материала (текстолит, гетинакс, пластмасса). Провод бескаркасной катушки наматывают прямо на сердечник, обмотанный изоляционной лентой, или па специальный шаблон. Для обеспечения прочности катушки, выполненной на шаблоне, ее обматывают лентой (бапдажируют) и пропитывают компаундным лаком. Катушки, как правило, наматывают медным проводом с изоляцией, выбираемой исходя из назначения и условий работы электромагнита.
В зависимости от способа включения различают последовательные и параллельные катушки. Параллельные катушки имеют большое число витков и наматываются тонким проводом. Обычно они включаются на полное напряжение сети. Последовательные катушки имеют сравнительно малое сопротивление, так как выполняются толстым проводом и с малым числом витков. Ток такой катушки определяется не ее сопротивлением, а зависит от тех устройств, с которыми катушка включена последовательно.
Обычно они включаются на полное напряжение сети. Последовательные катушки имеют сравнительно малое сопротивление, так как выполняются толстым проводом и с малым числом витков. Ток такой катушки определяется не ее сопротивлением, а зависит от тех устройств, с которыми катушка включена последовательно.
Различают также электромагниты, предназначенные для длительной, кратковременной и повторно-кратковременной работы.
§ 21.3. Порядок проектного расчета электромагнита
Исходными данными для расчета электромагнита обычно являются требуемое тяговое усилие Fэ, ход (или угол поворота) якоря и напряжение питания U. Кроме того, в задании на проектирование указываются режим работы электромагнита и условия эксплуатации. Могут быть заданы требуемые быстродействие, габариты, вес, стоимость.
В результате расчета необходимо выбрать конструкцию электромагнита, материал магнитопровода, определить геометрические размеры магнитопровода и катушки, обмоточные данные.
На первом этапе проектного расчета необходимо выбрать конструкцию электромагнита, используя понятие конструктивного фактора А. Эта величина определяется в зависимости от тягового усилия и хода якоря :
(21.1)
где — в Н; — в см.
При используют прямоходовый электромагнит соленоидного типа; при —прямоходовый с коническим стопой; при -прямоходовый с плоским стопом; при 2,6<<26 — с поворотным якорем клапанного типа.
Форму электромагнита выбирают с учетом необходимой тяговой характеристики. На рис. 21.2 показаны типичные тяговые
характеристики электромагнитов. Если необходимо иметь пологую тяговую характеристику 1, то следует применять прямоходовый электромагнит, если крутую 2 — клапанный электромагнит. Ш-образпая форма электромагнита (5) используется преимущественно в схемах переменного тока.
На втором этапе выбирается индукция и определяется сечение магнитопровода.
Сила притяжения якоря в основном создается магнитным потоком в воздушном зазоре. Поэтому при проектном расчете влияние на тяговую силу потоков рассеяния обычно не учитывается. Оптимальный магнитный поток и индукция в рабочем воздушном зазоре может находиться в весьма широких пределах и зависит от соотношения между тяговым усилием и величиной хода, т. е. от конструктивного фактора А. На рис. 21.3 приведены зависимости индукции от конструктивного фактора для трех конструкций электромагнитов (с плоским стопом, с коническим стопом, клапанного типа). После выбора по этим кривым индукции можно определить площадь сечения полюсного наконечника. Напомним формулу (17.13), связывающую тяговое усилие синдукцией в зазоре и сечением полюсного наконечника При определении диаметра сердечника необходимо предварительно задаться индукцией в стали и коэффициентом рассеяниямагнитной системы. Для мощных электромагнитовпринимается в пределах , для небольших магнитных систем реле — в пределах от . Коэффициент рассеяния Меньшие значения берутся при малых ходах якоря, большие — для перемещений в несколько сантиметров. Сечение сердечника определяется по формуле
Для мощных электромагнитовпринимается в пределах , для небольших магнитных систем реле — в пределах от . Коэффициент рассеяния Меньшие значения берутся при малых ходах якоря, большие — для перемещений в несколько сантиметров. Сечение сердечника определяется по формуле
(21.2)
Сечение ярма обычно принимается равным сечению сердечника , а сечение якоря — меньшим:
(21.3)
На следующем этапе определяются геометрические размеры электромагнита, связанные с размещением катушки. При протекании по катушке с числом витков тока катушка должна создать МДС, обеспечивающую индукцию в зазоре . Так как часть этой МДС теряется в паразитных зазорах и в стали магнитопровода, то следует учесть долю МДС, не участвующую в создании
Рис. 21.3. Зависимость индукции в зазоре электромагнита и размеров катушки от величины конструктивного фактора
требуемого тягового усилия. Введем коэффициент , представляющий собой отношение МДС, не участвующей в создании тягового усилия, к общей МДС катушки. Тогда, полагая проводимость воздушного зазора , определяем полную МДС катушки:
Введем коэффициент , представляющий собой отношение МДС, не участвующей в создании тягового усилия, к общей МДС катушки. Тогда, полагая проводимость воздушного зазора , определяем полную МДС катушки:
(21.4)
Ее можно уточнить при расчете магнитной цепи с использованием кривых намагничивания для выбранного материала магнитопровода.
Соотношение высоты обмоточного пространства катушки к его ширине обычно выбирается по конструктивному фактору (нижняя кривая на рис. 21.3). Конкретные размеры катушки выбирают на основании условий нагрева катушки. При этом учитываются режим работы, коэффициент теплоотдачи , способ намотки, влияющий на коэффициент заполнения , изоляция провода, определяющая допустимую температуру . Кроме того, необходимо учесть и возможность снижения напряжения питания до
С учетом этих факторов ширина обмоточного пространства катушки определяется по формуле
(21. 5)
5)
Зная размеры катушки, можно определить все размеры магнитопровода электромагнита: высоту сердечника и ярма, расстояние между ними и т. д.
§ 21.4. Особенности расчета электромагнитов переменного тока
В электромагнитах переменного тока индукция в магнитной цепи изменяется по синусоидальному закону. Так как максимальное (амплитудное) значение индукции враз больше действующего значения, а величина тягового усилия пропорциональна квадрату индукции, то электромагнит переменного тока при одинаковой степени насыщения магнитопровода развивает в два раза меньшее значение тягового усилия. Поэтому при определении конструктивного фактора для электромагнита переменного тока принимается удвоенное значение тягового усилия»
(21.6)
Оптимальные соотношения между высотой и шириной обмоточного пространства катушки t = h/a получаются меньшими, чем для электромагнитов постоянного тока. Поэтому катушки электромагнитов переменного тока будут короче и толще. Более короткая катушка уменьшает длину сердечника и его объем, что приводит к снижению потерь в стали, вызванных гистерезисом и вихревыми токами. Этих потерь не было в электромагнитах постоянного тока. Там стремились к уменьшению потерь в меди, что обеспечивалось уменьшением средней длины витка катушки за счет малой ее толщины. В электромагнитах переменного тока надо стремиться к уменьшению суммарных потерь (и в меди, и в стали).
Более короткая катушка уменьшает длину сердечника и его объем, что приводит к снижению потерь в стали, вызванных гистерезисом и вихревыми токами. Этих потерь не было в электромагнитах постоянного тока. Там стремились к уменьшению потерь в меди, что обеспечивалось уменьшением средней длины витка катушки за счет малой ее толщины. В электромагнитах переменного тока надо стремиться к уменьшению суммарных потерь (и в меди, и в стали).
При уточненном расчете электромагнитов необходимо учитывать потоки рассеяния и падения МДС в нерабочих зазорах и в стали. Кроме того, в электромагнитах переменного тока необходимо учитывать потери на гистерезис и на вихревые токи в магнитопроводе
Эти потери пропорциональны частоте питания, массе магнитопровода и индукции в квадрате. Для материалов, используемых в магнитной цепи электромагнита, в справочниках приводятся удельные потери (в зависимости от толщины листа и частоты) на единицу массы.
Число витков обмотки электромагнита переменного тока
(21. 7)
7)
Диаметр провода определяется по допустимой с точки зрения нагрева плотности тока. При этом ток определяется с учетом потерь в стали:
(21.8)
где —ток потерь в стали; —ток намагничивания.
Значения и можно определить с помощью электрической схемы замещения электромагнита (рис. 21.4). На схеме приняты следующие обозначения:—активное сопротивление обмотки;
— индуктивное сопротивление, соответствующее рабочему потоку; — индуктивное сопротивление, соответствующее потоку рассеяния; —активное сопротивление, обусловленное потерями в магнитопроводе на гистерезис и вихревые токи.
Если пренебречь падением напряжения на активном сопротивлении обмоткии потоком рассеяния, то ток потерь
(21. 9)
9)
Намагничивающий ток, создающий рабочий магнитный поток, определяется по МДС (). Если пренебречь падением МДС в стали и нерабочих зазорах, то
где—действующеезначение переменного магнитного потока в рабочем зазоре; —магнитная проводимость рабочего зазора.
Предварительный расчет электромагнита с короткозамкнутым витком проводится без учета экранирующего действия этого витка. Точный расчет параметров короткозамкнутого витка довольно сложен. На практике его выполняют из меди или латуни таким образом, чтобы он охватывал примернополюса электромагнита. При Ш-образном магнитопроводе короткозамкнутый виток 3 располагается на среднем (рис. 21.5, а) или на крайних стержнях (рис. 21.5, б). С витком на среднем стержне выполнены широко распространенные электромагниты серии МИС. Для уменьшения падения МДС в нерабочем зазоре между якореми сердечником 2 имеется так называемый воротничок 5. Номинальное тяговое усилие электромагнитов серии МИС изменяется от 15 до 120 Н при ходе якоря 15—30 мм. Механическая износостойкость составляет примерно 106 циклов включений-отключений.
Механическая износостойкость составляет примерно 106 циклов включений-отключений.
С витками на крайних стержнях (рис. 21.5, б) вы полнены длинноходовые электромагниты серии ЭД. Они имеют Т-образный якорь 1. Тяговое усилие создается во всех трех стержнях, т. е. магнитная цепь содержит три рабочих зазора. Тяговое усилие электромагнитов серии ЭД достигает 250 Н при максимальном перемещении якоря до 40 мм. Электромагниты срабатывают при подаче тока в обмотку 4.
§ 21.5. Электромагнитные муфты
Электромагнитная муфта предназначена для передачи вращающего момента двигателя к рабочему механизму. Муфта состоит из двух частей: ведущей и ведомой, — которые образуют замкнутую магнитную систему. Муфта выполнена из ферромагнитных материалов и имеет одну или несколько обмоток возбуждения.
Различают фрикционные муфты и асинхронные (индукционные) муфты. Во фрикционных муфтах передача вращения происходит за счет силы трения между ведущей частью, закрепленной на валу электродвигателя, и ведомой частью, которая может перемещаться вдоль вала рабочего механизма на шлицах или шпонке. При подаче тока в обмотку возбуждения создается магнитодвижущая сила и подвижная часть муфты прижимается к неподвижной. Такая муфта работает как электромагнит. Для передачи значительных моментов используются многодисковые конструкции электромагнитных муфт. Как на ведущем, так и на ведомом валу имеется несколько стальных дисков, которые под действием МДС притягиваются друг к другу и благодаря трению их поверхностей передается вращение. Соприкасающиеся поверхности фрикционных муфт выполняют из специального материала — сплава фер-радо, имеющего коэффициент трения в 3—4 раза больший, чем у стали.
При подаче тока в обмотку возбуждения создается магнитодвижущая сила и подвижная часть муфты прижимается к неподвижной. Такая муфта работает как электромагнит. Для передачи значительных моментов используются многодисковые конструкции электромагнитных муфт. Как на ведущем, так и на ведомом валу имеется несколько стальных дисков, которые под действием МДС притягиваются друг к другу и благодаря трению их поверхностей передается вращение. Соприкасающиеся поверхности фрикционных муфт выполняют из специального материала — сплава фер-радо, имеющего коэффициент трения в 3—4 раза больший, чем у стали.
Различают конструкции электромагнитных фрикционных муфт с неподвижной катушкой электромагнита и с вращающейся катушкой.
В маломощных муфтах (рис. 21.6, а) ведущая 1 и ведомая 2 полумуфты не имеют обмоток, но одна из них (обычно ведомая) может перемещаться вдоль вала по шпонке или шлицам. Обе муфты окружены неподвижной катушкой электромагнита 3, которая при подключении к напряжению создает магнитный поток. Возникающие электромагнитные силы прижимают ведомую полумуфту к ведущей. Момент трения между полумуфтами должен быть больше момента нагрузки на ведомом валу. При отключении катушки муфты неподвижная полумуфта отжимается от подвижной с помощью пружины (на рисунке не показана). Обычно эта же пружина прижимает полумуфту к тормозным поверхностям, что
Возникающие электромагнитные силы прижимают ведомую полумуфту к ведущей. Момент трения между полумуфтами должен быть больше момента нагрузки на ведомом валу. При отключении катушки муфты неподвижная полумуфта отжимается от подвижной с помощью пружины (на рисунке не показана). Обычно эта же пружина прижимает полумуфту к тормозным поверхностям, что
обеспечивает быструю остановку ведомого вала. В мощных муфтах (рис. 21.6, б) для увеличения величины передаваемого момента в подвижной части муфты используется несколько стальных дисков 2, имеющих свободу перемещения вдоль оси вращения ведущего и ведомого валов.
Dc 12v 88 lb 40kg электрический подъемный магнит электромагнитный электромагнит подъемный удерживающий электромагнит Продажа
Компатибилита
Chcete-li potvrdit, že tato část odpovídá vašemu vozidlu, zadejte níže uvedené údaje o vozidle.
Tato část je kompatibilní s 0 vozidlo (vozy). Zobrazit všechna compatibilní vozidla
Zobrazit všechna compatibilní vozidla
Tato část je kompatibilní s 1 vozidlo (vozy) vhodný
Тато не совместимо с
- Rok
- Уделат
- Моделька
- Субмодель
- Накладка
- Двигатель
Адрес:
DC 12 В 88 LB 40 кг Электромагнитный магнит Электромагнитный электромагнет výtahový elektromagnet
Specifikace:
Materiál: kov + plast
.
Великост: 49x 21мм
Модель: WF-P49 / 21
Напети: 12 В
Sání: 400 N / 88 liber
Množství: 1ks
Používání:
Nainstalované v automatizačním zařízení, poté napájení a provoz.
Funkce:
1. Elektromagnet s přísavkou může генерировать сильную адсорбцию sílu za stavu napájení a může být instalován do automatického zařízení, aby mohl hrát roli zastavení nebo pohybu.
2. Широкое использование в автоматическом распределении виртуальных линий, трехдисковые конструкции, манипуляторы, экспериментальные образцы, металлические конструкции, автоматические механические соединения, механические соединения и механические соединения.
3.ovládání je jednoduché, úspory energie, bezpečné a spolehlivé, a může být dálkové ovládání.
Obsah balení:
1x přidržovací elektromagnet
Poznámka:
1. Použití elektromagnetického povrchu pohárku by mělo být hladké, ne drsné, což by mělo ovlivnit účinek použití.
Použití elektromagnetického povrchu pohárku by mělo být hladké, ne drsné, což by mělo ovlivnit účinek použití.
2. Адсорбционная область předmětů používajících přísavkový elektromagnet by měla převažovat nad elektromagnetem obličeje.
3.Výběrový předmět typu adesorpční elektromagnetické adesorpce, pokud magnetické vodivé materiály, jako je nízko uhlíková ocel, elektrické čisté železo, křemíkový plech a jinak vlineké.
4.Použití sacího typu elektromagnetu adorpčního objektu musí mít dostatečnou tloušťku, obvykle pokud možno ne menší než tloušťku stěny elektromagnetu.
5.Směšovací pohár typu elektromagnet nelze použít k pohlcení předmětů s vysokou teplotou.
Oznámení:
— Vzhledem k různým výrobním šaržím se mohou podrobnosti o produktu trochu lišit.Pokud rozdíl odstraníte, kupte jej prosím opatrně.
— Поверхность одиночки 1-3 мм в длину ручного расстояния.
— Вжледем к одному образу и другому свету немуси образ, который скутечноу барву положки.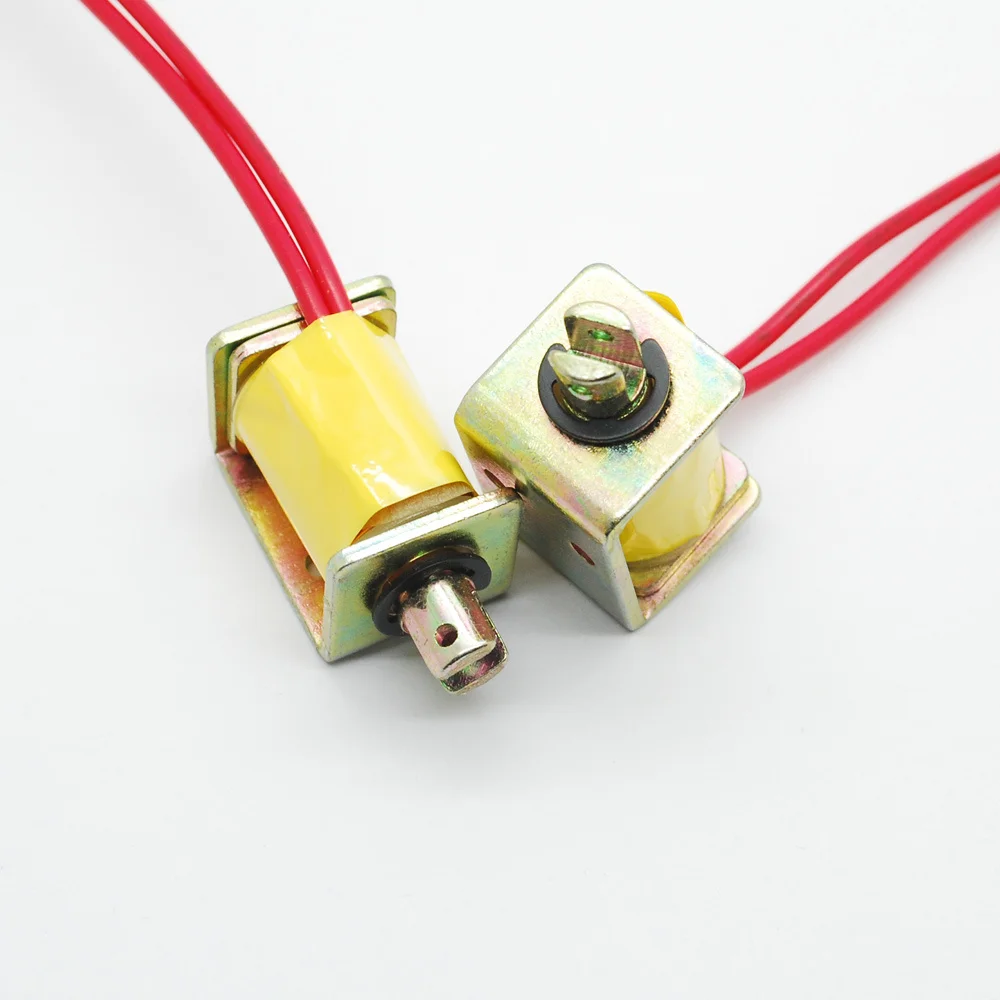 Děkujeme za pochopení.
Děkujeme za pochopení.
Дополнительная информация:
DC 12v 22 lb 10kg электрический подъемный магнит 5w соленоид удерживающий электромагнит Продажа
verenigbaarheid
Om te bevestigen dat dit onderdeel geschikt is voor uw voertuig, voert u hieronder uw voertuiginformatie in.Dit deel совместим с 0 voertuig (en). Мультяшные модели для всех совместимых voertuigen
Dit deel совместим с 1 voertuig (en) passen bij
Dit gedeelte is niet Compatibel met
- Джаар
- Сделано
- Модель
- подмодель
- триммер
- Двигатель
Beschrijving:
DC 12V 22 LB 10kg Elektrische hefmagneet Elektromagnet 5W Электромагнит удерживающего электромагнита лифта
спецификации:
Материал: Metaal
Расширение: 12 В постоянного тока
Хьюдиг: 0. 33А
33А
Vermogensverbruik: 5 Вт
Hefkracht: 22 фунта (10 кг)
Драадмаат: M4 (montageschroef niet meegeleverd)
Длина: 25,5 см
Маат: 29×22 мм
Hoeveelheid: 1 шт.
Кенмерк:
Elektrische hefmagneet.
Krachtig en compact.
Рад en vlak oppervlak.
Laag verbruik en Betrouwbaar.
Eenvoudige controle, inspanningbesparing, veilig en betrouwbaar, en kan op afstand worden bediend.
Zuig-solenoïde in de geactiveerde toestand kan een sterke kleefkracht producteren, het kan geïnstalleerd word in automatiseringsapparatuur om geadsorbeerd te word om te stoppen of te verplaatsen voorwerpen een rol spelen.
Передача:
Wijd gebruikt в geautomatiseerde productielijnen en distributie, сортировочные машины, транспортные роботы, testapparatuur, medisch, slojp-, snij-, snij- en and geautomatiseerd verwerkingsproductiemateriaal продукта, рычаг.
waarschuwingen:
Geadsorbeerd oppervlak moet zo glad en adorptiegebied zijn van niet minder dan de magnetische trekoppervlak.
Паккет Инбегрепен:
1шт x DC 12V 22LB elektrische hefmagneet
Let op:
1. Сделайте это, чтобы узнать, как работает дверь. Zorg ervoor dat je het niet erg vindt voordat je het bod.
2. De kleur kan verschillend zijn als het verschilweergave, beginrijpt het.
Meer подробности:
Электромагнитный источник питания модели 648
Модель 648 Характеристики
- Биполярный, линейный, 4-квадрантный выход
- ± 135 A / ± 75 В, 9.
 1 кВт
1 кВт - Низкий уровень шума
- 1 мА запрограммированного разрешения по току
- Аналоговое программирование и интерфейсы IEEE-488 и USB
- Встроенная защита от неисправностей
Электромагнитный источник питания модели 648 — это надежный, отказоустойчивый источник питания мощностью 9 кВт, оптимизированный для питания больших 7 или 10 в исследовательских электромагнитах. Он специально разработан для высокоточного лабораторного использования, требующего чрезвычайно низкого электрического шума.Линейная конструкция устраняет нежелательный высокочастотный шум, типичный для импульсных источников питания. Устраняя необходимость во внешнем переключении или вмешательстве оператора для изменения полярности тока, модель 648 использует удобную биполярную 4-квадрантную работу. Он способен подавать напряжение ± 135 А / ± 75 В при номинальной нагрузке 0,5 Ом, 0,5 Н. Модель 648 имеет прочную конструкцию, встроенную защиту от неисправностей и простой, чистый дизайн внутренней электроники.
Модель 648 имеет прочную конструкцию, встроенную защиту от неисправностей и простой, чистый дизайн внутренней электроники.
Этот надежный блок питания разработан для минимизации времени простоя.В нем используется беспроблемное водяное охлаждение для бесшумной и эффективной работы по сравнению с источниками питания с воздушным охлаждением. Бесшовные водопроводы имеют только внешние соединения, что исключает внутренние утечки воды. Кроме того, предохранительные блокировки гарантируют, что охлаждающая вода всегда течет к источнику во время работы. При желании магнитная вода также может быть подключена к источнику питания. Внутренний программный контроль разумно управляет использованием воды.
В сочетании с электромагнитом Lake Shore EM7 7 и гауссметром модели 475 DSP, модель 648 образует универсальную систему определения характеристик электромагнита, идеально подходящую для широкого круга приложений, определяемых пользователем, включая магнитооптические исследования, тесты магнитного гистерезиса, измерения восприимчивости и т.
