Что такое электромагнитный актуатор. Как работают электромагнитные актуаторы. Какие бывают виды электромагнитных актуаторов. Где применяются электромагнитные актуаторы. Каковы преимущества и недостатки электромагнитных актуаторов.
Принцип работы электромагнитных актуаторов
Электромагнитные актуаторы преобразуют электрическую энергию в механическое движение с помощью магнитного поля. Основой их работы являются следующие физические законы:
- Закон электромагнитной индукции Фарадея
- Сила Лоренца
- Закон Био-Савара
Как работает типичный электромагнитный актуатор? При подаче электрического тока на обмотку создается магнитное поле. Это поле взаимодействует с подвижной частью актуатора, вызывая ее перемещение. Таким образом, электрическая энергия преобразуется в механическую работу.
Основные виды электромагнитных актуаторов
Существует несколько основных типов электромагнитных актуаторов:
1. Соленоидные актуаторы
Соленоидные актуаторы состоят из катушки и подвижного сердечника. При подаче тока сердечник втягивается в катушку, обеспечивая линейное перемещение. Они широко применяются в клапанах, замках и других устройствах, требующих простого линейного движения.

2. Актуаторы с подвижной катушкой
В этих актуаторах катушка с током перемещается в постоянном магнитном поле. Такая конструкция обеспечивает высокую точность позиционирования и используется, например, в жестких дисках компьютеров.
3. Актуаторы с подвижным магнитом
Здесь постоянный магнит перемещается между полюсами электромагнита. Они обеспечивают большое усилие и часто применяются в вибрационных системах.
Преимущества и недостатки электромагнитных актуаторов
Электромагнитные актуаторы обладают рядом достоинств и ограничений:
Преимущества:
- Высокая скорость срабатывания
- Простота управления
- Надежность конструкции
- Возможность создания больших усилий
Недостатки:
- Ограниченный ход
- Нелинейность характеристик
- Энергопотребление в статическом режиме
Области применения электромагнитных актуаторов
Электромагнитные актуаторы нашли широкое применение в различных отраслях:
- Автомобильная промышленность (клапаны двигателя, системы ABS)
- Робототехника (захваты, манипуляторы)
- Аэрокосмическая отрасль (системы управления)
- Медицинское оборудование (дозаторы, насосы)
- Промышленная автоматизация (клапаны, переключатели)
Инновационные разработки в области электромагнитных актуаторов
Современные исследования направлены на улучшение характеристик электромагнитных актуаторов. Некоторые перспективные направления:

- Использование новых магнитных материалов для повышения эффективности
- Разработка гибридных актуаторов, сочетающих электромагнитный и другие принципы действия
- Создание микроактуаторов для применения в МЭМС
- Совершенствование систем управления для повышения точности позиционирования
Сравнение электромагнитных актуаторов с другими типами
Как электромагнитные актуаторы соотносятся с другими типами актуаторов? Давайте сравним их с некоторыми альтернативами:
Электромагнитные vs Пьезоэлектрические актуаторы
- Электромагнитные: большой ход, высокие усилия, низкая точность
- Пьезоэлектрические: малый ход, высокая точность, быстрый отклик
Электромагнитные vs Гидравлические актуаторы
- Электромагнитные: компактность, простота конструкции
- Гидравлические: очень высокие усилия, плавность хода
Выбор типа актуатора зависит от конкретного применения и требуемых характеристик.
Проектирование систем с электромагнитными актуаторами
При разработке систем с электромагнитными актуаторами необходимо учитывать ряд факторов:

- Требуемое усилие и ход актуатора
- Скорость срабатывания
- Точность позиционирования
- Энергопотребление
- Условия эксплуатации (температура, влажность и т.д.)
Правильный выбор актуатора и системы управления позволяет создать эффективное и надежное устройство.
Тенденции развития электромагнитных актуаторов
Какие тенденции наблюдаются в развитии электромагнитных актуаторов?
- Миниатюризация: создание все более компактных устройств
- Повышение энергоэффективности
- Интеграция с интеллектуальными системами управления
- Использование новых материалов (например, высокотемпературных сверхпроводников)
- Разработка актуаторов для экстремальных условий эксплуатации
Эти направления открывают новые возможности для применения электромагнитных актуаторов в различных областях техники.
Заключение
Электромагнитные актуаторы являются важным элементом современных мехатронных систем. Их простота, надежность и возможность создания значительных усилий обеспечивают широкое применение в различных отраслях промышленности. Продолжающиеся исследования и разработки в этой области позволяют создавать все более совершенные устройства, отвечающие растущим требованиям техники.

Актуаторы
Вы находитесь здесь: Главная / CEDRAT TECHNOLOGIES / Технологии / Актуаторы / Магнитные актуаторы и двигатели
Магнитные актуаторы используют магнитные эффекты для генерации силы, которая влияет на движение частей актуатора.
Первое большое семейство магнитных актуаторов основывается на магнитных силах действующих на расстоянии, — силах Лапласа-Лоренца и реактивных силах. Для линейного перемещения доступен диапазон хода от 1 до 20 мм, дополняющий пьезо актуаторы. Они могут быть подразделены на 3 категории:
- Актуатор с подвижной катушкой (Moving coil actuator): Помещенная в постоянное магнитное поле, подвижная катушка приводится в действие током, подвергаемая воздействию сил Лапласа-Лоренца. Эта сила пропорциональна приложенному току. Поэтому эти актуаторы являются управляемыми. Они также называются звуковыми катушками (voice-coil) с тех пор, как нашли свое первое применение в динамиках.
 CEDRAT TECHNOLOGIES разработал звуковые катушки с высокими эксплуатационными характеристиками (также названными Подвижными Катушками) и Моментные Актуаторы с ограниченным углом вращения (Limited Angle Torque – LAT) для различных автомобильных, промышленных и космических применений.
CEDRAT TECHNOLOGIES разработал звуковые катушки с высокими эксплуатационными характеристиками (также названными Подвижными Катушками) и Моментные Актуаторы с ограниченным углом вращения (Limited Angle Torque – LAT) для различных автомобильных, промышленных и космических применений. - Актуаторы с подвижным магнитом (Moving magnet actuator): Помещенный между двумя магнитными полюсами, постоянный подвижный магнит может перемещаться от одного полюса к другому с применением катушек. Такие актуаторы с подвижными магнитами являются двустабильными. Они обеспечивают высокую силу, но не являются хорошо управляемыми. Миниатюрные устройства были разработаны компанией CEDRAT TECHNOLOGIES для блокирующих и for locking and haptic applications.
- Moving iron actuator : Термин «Moving iron» произошел от «moving magnet», с той разницей, что подвижная часть сделана из железа. Главный технологический аспект — получение высокоуправляемого актуатора.
 В обычных электромагнитах реактивная сила не управляема. Новый Управляемый магнитный Актуатор с Подвижным штоком из Железа (Moving Iron Controllable magnetic Actuator – MICA) был разработан компанией CEDRAT TECHNOLOGIES на основе электромагнитного актуатора, в котором сила может реверсировать во всем диапазоне хода. Катушка не устанавливалась на подвижную часть, так как любая катушка соединяется проводами с неподвижной частью и может быть причиной поломки при воздействии продолжительной вибрации. Так же во избежании поломок при реверсивных ударах актуатора в подвижной части актуатора избегали магнитов, которые известны своей хрупкостью. Поэтому активная подвижная часть сделана из железа, которое не подвержено этим недостаткам. MICA применяется для генерации вибрации или для активного демпфирования во встраиваемых системах. Он обеспечивает большие величины хода по сравнению с пьезо актуаторами. MICA предлагает большие силы, при том что нагревается намного меньше, чем любые актуаторы с Подвижными Катушками.
В обычных электромагнитах реактивная сила не управляема. Новый Управляемый магнитный Актуатор с Подвижным штоком из Железа (Moving Iron Controllable magnetic Actuator – MICA) был разработан компанией CEDRAT TECHNOLOGIES на основе электромагнитного актуатора, в котором сила может реверсировать во всем диапазоне хода. Катушка не устанавливалась на подвижную часть, так как любая катушка соединяется проводами с неподвижной частью и может быть причиной поломки при воздействии продолжительной вибрации. Так же во избежании поломок при реверсивных ударах актуатора в подвижной части актуатора избегали магнитов, которые известны своей хрупкостью. Поэтому активная подвижная часть сделана из железа, которое не подвержено этим недостаткам. MICA применяется для генерации вибрации или для активного демпфирования во встраиваемых системах. Он обеспечивает большие величины хода по сравнению с пьезо актуаторами. MICA предлагает большие силы, при том что нагревается намного меньше, чем любые актуаторы с Подвижными Катушками.
 CEDRAT TECHNOLOGIES разработал звуковые катушки с высокими эксплуатационными характеристиками (также названными Подвижными Катушками) и Моментные Актуаторы с ограниченным углом вращения (Limited Angle Torque – LAT) для различных автомобильных, промышленных и космических применений.
CEDRAT TECHNOLOGIES разработал звуковые катушки с высокими эксплуатационными характеристиками (также названными Подвижными Катушками) и Моментные Актуаторы с ограниченным углом вращения (Limited Angle Torque – LAT) для различных автомобильных, промышленных и космических применений.Второе семейство магнитных актуаторов основывается на магнитно-управляемых активных материалах. Для инновационных устройств компания CEDRAT TECHNOLOGIES использует два типа устройств:
- Магнитострикционный актуатор : Эти актуаторы используют магнитострикционный эффект, который заключается в деформации магнитострикционных материалов, помещаемых в магнитное поле. Например, магнитострикционная деформация Терфенола-Д достигает 1600 частей на миллион, делая этот активный материал интересным конкурентом пьезоэлектрической керамики на основе титаната и цирконата свинца (pzt ceramics) для высокомощных трансдъюсеров или низковольтных применений. Магнитострикционные актуаторы обеспечивают высокие силы при низких напряжениях (12 или 24 В), что соответствует специальным требованиям в медицине, нефтяной или химической промышленности (из-за риска воспламенения).
- Актуатор на магнитно-реологических жидкостях : Магнитно-реологические жидкости (Magneto Rheological Fluid — MRF) могут отвердевать при помещении в магнитное поле.
 Этот эффект может быть использован для построения клапанов без каких-либо подвижных частей и для построения различных MRF актуаторов : клапана, тормозные системы, зажимы, полу-активные демпферы, автоматизированные гидростатические / гидродинамические подшипники…
Этот эффект может быть использован для построения клапанов без каких-либо подвижных частей и для построения различных MRF актуаторов : клапана, тормозные системы, зажимы, полу-активные демпферы, автоматизированные гидростатические / гидродинамические подшипники…
Третье широкое семейство магнитных актуаторов это электрические двигатели, также называемые электрическими машинами вращения. Компания CEDRAT TECHNOLOGIES может произвести расчет всех габаритов в качестве услуг, но разрабатывает только малогабаритные электрические двигатели, такие как бесколлекторные двигатели постоянного тока (Brushless DC motors — BLDC) и шаговые двигатели.
Эти технологии представлены далее в примерах. Вы также можете скачать наш каталог пьезо и магнитных изделий. Кроме того, доступны публикации по магнитным приводам и электродвигателям.
| Электромагнитные актуаторы | |||||
| Описание: |
Компания CEDRAT TECHNOLOGIES разрабатывает по требованиям заказчика электромагнитные актуаторы, предназначенные для специализированных приложений заказчика, когда стандартные изделия не подходят. |
||||
| Области применения: |
Приведение в действие клапанов, механизмы блокировки и разблокировки на основе перемещения штифта, контакторы … |
||||
| Статус: | Изделие | ||||

| Управляемый Актуатор с Подвижным штоком из Железа (Moving Iron Contollable Actuator — MICA) | |||||
| Описание: | MICA™ актуатор соответствует требованиям по компактности, высокой динамичности, точности, надежности и прочности. Эта технология была разработана, чтобы ликвидировать пробел между хорошо известными звуковыми катушками и соленоидными технологиями.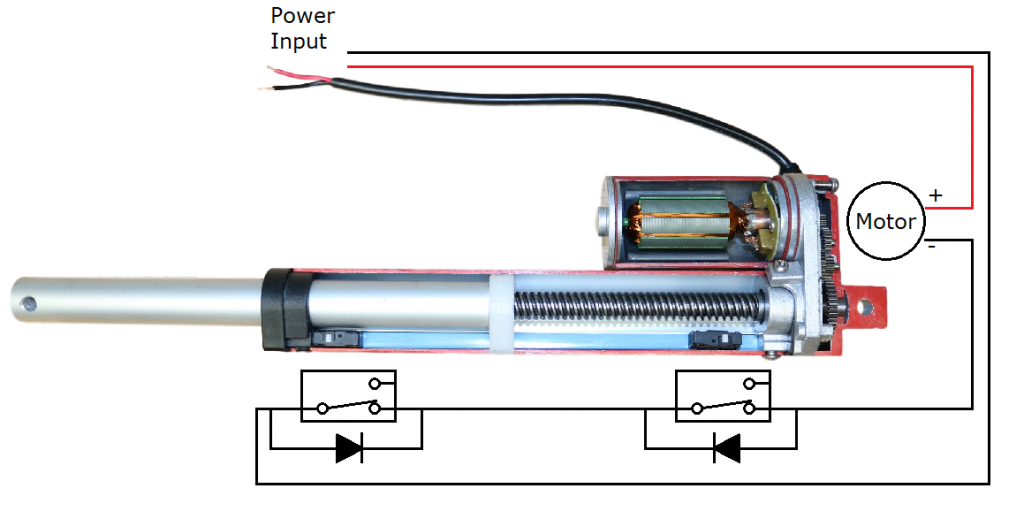 |
||||
| Области применения: | Управление клапанами, приведение в действие насосов и компрессоров, испытательные стенды, генерация вибрации, активное управление вибрацией, высокоскоростной механизм захвата, высокоскоростное позиционирование… | ||||
| Статус: | Стандартное изделие | ||||
| Электромагнитный механизм отвода фиксатора (Broche Rétractable Utilisant une Commande Electromagnétique – BRUCE) | |||||
| Описание: | По запросу Французского космического Агентства компания CEDRAT TECHNOLOGIES разработала электромагнитный механизм отвода фиксатора, пригодный для повторного использования, названный BRUCE. | ||||
| Области применения: | Космос, электромагнитный, механизм отвода фиксатора (pin puller). .. .. |
||||
| Статус: | Стандартный | ||||
| Актуаторы со Звуковыми Катушками (voice-coil) | |||||
| Описание: | Актуатор с подвижной катушкой (Moving coil actuator) основывается на действии силы Лапласа-Лоренца, которая прямо пропорциональна приложенному току. Они также называются звуковыми катушками (voice-coil) с тех пор, как нашли свое первое применение в динамиках. Это наиболее обычный линейный магнитный управляемый актуатор. Компания CEDRAT TECHNOLOGIES изготовила несколько актуаторов по принципу звуковой катушки для космических применений (например MTG, IASI). | ||||
| Области применения: | Высоко линейные актуаторы, Аэрокосмическая отрасль … | ||||
| Статус: | Этап оценки для космических применений | ||||
| Линейно Перемещаемый Магнит с Двумя устойчивыми состояниями (Bistable Linear Moving Magnet — BLMM) | |||||
| Описание: | Он изготовлен на основе постоянного магнита, перемещаемого между двумя разноименными электромагнитами.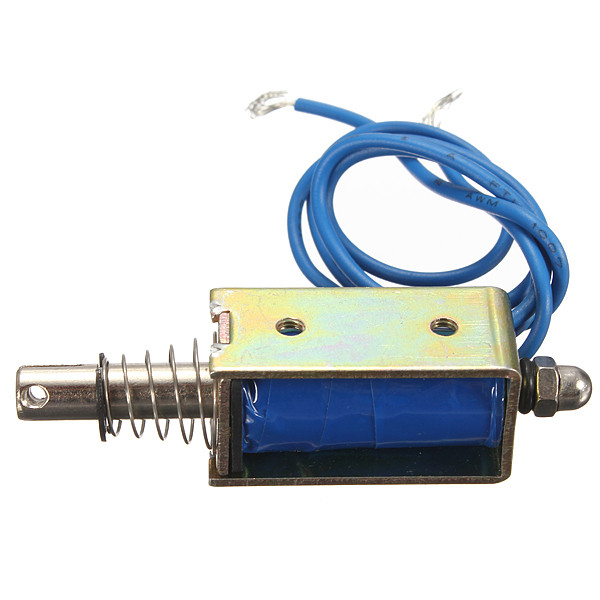 Это магнитный актуатор с двумя устойчивыми состояниями, обладающий высокой силой удержания при выключенном питании. Актуаторы BLMM являются миниатюрными решениями производства компании CEDRAT TECHNOLOGIES. Это магнитный актуатор с двумя устойчивыми состояниями, обладающий высокой силой удержания при выключенном питании. Актуаторы BLMM являются миниатюрными решениями производства компании CEDRAT TECHNOLOGIES. |
||||
| Области применения: | Стопорные механизмы, Генераторы вибрации, Микро-клапана.. | ||||
| Статус: | Стандартное изделие | ||||
| Технологии Магнитно-Реологических Жидкостей (Magneto Rheological Fluid — MRF) | |||||
| Описание: | На основе магнитно-Реологических Жидкостей можно построить новые решения, такие как активные клапана, автоматизированные гидростатические и гидродинамические подшипники … Компания CEDRAT TECHNOLOGIES реализовала характеристики MRF жидкостей на примере решений для механической обработки. |
||||
| Области применения: | Активные MRF клапана, автоматизированные гидростатические или гидродинамические подшипники | ||||
| Статус: | Проверка концепции | ||||
| Актуаторы на Магнитно-Реологических Жидкостях (Magneto Rheological Fluid — MRF) | |||||
| Описание: | Представленный атуатор на основе магнитно-Реологических Жидкостей является новым самоблокирующимся линейным магнитным актуатором, которому требуется очень малая электрическая мощность (менее 2 Вт) для работы с силами до 100 Н. Он подходит для создания безотказных амортизаторов и демпферов. | ||||
| Области применения: | Активные Демпферы, амортизаторы, блокирующие механизмы | ||||
| Статус: | Проверка концепции | ||||
| Актуаторы с Ограниченным Углом вращения (Limited Angle Torque Actuators- LAT) | |||||
| Описание: | Актуатор с Ограниченным Углом вращения (LAT) обеспечивает угловой поворот в пределах +/- 15°. Он обеспечивает плавное вращательное движение с высоким разрешением и высокой точностью для механизмов позиционирования для авиационных, космических и оптических применений. Он обеспечивает плавное вращательное движение с высоким разрешением и высокой точностью для механизмов позиционирования для авиационных, космических и оптических применений. |
||||
| Области применения: | Вращательное движение с высоким разрешением, Микро нано Позиционирование, Ориентирование, Сканирование | ||||
| Статус: | Прототип | ||||
| Модернизация Бесколлекторных Двигателей постоянного тока | |||||
| Описание: | Компания CEDRAT TECHNOLOGIES проводит модернизацию доступных на рынке бесколлекторных двигателей для улучшения характеристик момента и скорости и для уменьшения потребляемой мощности с заменой деталей и испытаниями на стенде для микродвигателей вращения. |
||||
| Области применения: | Бесколлекторные двигатели постоянного тока для ответственных применений: авиация и космос, БПЛА … | ||||
| Статус: | Прототип | ||||
| Однофазный Шаговый Мини Двигатели (Single Phase Stepper Mini-Motor — SPSM-1) | |||||
| Описание: |
Однофазный шаговый микро двигатель вращения обладает настраиваемым воздушным зазором между статором и ротором и плоским постоянным магнитом. Двигатель был разработан в рамках проекта FP6 M2EMS EC, в сотрудничестве с CEA и ETA. This stepping motor is compatible with Si technologies. |
||||
| Области применения: | Микродвигатели, Микротехнологии.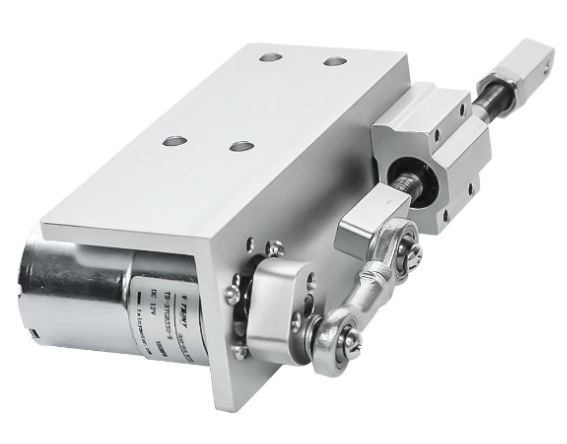 .. .. |
||||
| Статус: | Проверка концепции | ||||
| Магнитострикционные Актуаторы | |||||
| Описание: | Магнитострикционные CEDRAT TECHNOLOGIES являются твердотельными магнитными актуаторами на основе магнитострикционного материала Терфенола-Д. Актуаторы могут быть разработаны на воспроизводство больших усилий (>20 кН) и больших величин хода (> 200 мкм) при низких напряжениях (< 12 В) в статике и динамике. | ||||
| Области применения: | Генераторы большого усилия, Низковольтные актуаторы, Звуковые трансдъюсеры (сонар) … | ||||
| Статус: | Прототип | ||||
| Линейный усилитель для магнитных актуаторов LA24 | |||||
| Описание: | Много канальный Линейный Усилитель (Linear Amplifier) LA24 обладает малым уровнем шумов, работает в широком диапазоне частот и предназначен для высокоточного управления магнитными актуаторами CEDRAT TECHNOLOGIES. |
||||
| Области применения: | Позиционирование, Стабилизация | ||||
| Статус: | Стандартное изделие | ||||
| Источник питания на основе батарей для встраиваемых актуаторов, датчиков и мехатронных систем | |||||
| Описание: | Источники питания для пьезо или магнитных актуаторов, датчиков и мехатронных систем на основе обычных литиевых полимерных батареек с напряжением 3,7 В. | ||||
| Области применения: | Встраиваемые пьезо и магнитные актуаторы, двигатели, датчики, механизмы, клапана | ||||
| Статус: | Проверка концепции | ||||
Пьезоактуаторы CEDRAT TECHNOLOGIES для микропозиционирования
Вы находитесь здесь: Главная / Каталог / CEDRAT TECHNOLOGIES / Электромагнитные актуаторы/> / Магнитные актуаторы по техническому заданию заказчика
Магнитные актуаторы по техническому заданию заказчика
| Электромагнитные актуаторы | |||||
| Описание: |
Компания CEDRAT TECHNOLOGIES разрабатывает по требованиям заказчика электромагнитные актуаторы, предназначенные для специализированных приложений заказчика, когда стандартные изделия не подходят. |
||||
| Области применения: |
Приведение в действие клапанов, механизмы блокировки и разблокировки на основе перемещения штифта, контакторы … |
||||
| Статус: | Изделие | ||||
 Они охватывают широкий спектр приложений и рынков, таких как: индустриальная промышленность, автомобильная промышленность (например, проект е-Lift 3 с PSA), авиационно-космическая отрасль, медицина и т.д.
Они охватывают широкий спектр приложений и рынков, таких как: индустриальная промышленность, автомобильная промышленность (например, проект е-Lift 3 с PSA), авиационно-космическая отрасль, медицина и т.д.
| Управляемый Актуатор с Подвижным штоком из Железа (Moving Iron Contollable Actuator — MICA) | |||||
| Описание: | MICA™ актуатор соответствует требованиям по компактности, высокой динамичности, точности, надежности и прочности. Эта технология была разработана, чтобы ликвидировать пробел между хорошо известными звуковыми катушками и соленоидными технологиями. |
||||
| Области применения: | Управление клапанами, приведение в действие насосов и компрессоров, испытательные стенды, генерация вибрации, активное управление вибрацией, высокоскоростной механизм захвата, высокоскоростное позиционирование… | ||||
| Статус: | Стандартное изделие | ||||
| Электромагнитный механизм отвода фиксатора (Broche Rétractable Utilisant une Commande Electromagnétique – BRUCE) | |||||
| Описание: | По запросу Французского космического Агентства компания CEDRAT TECHNOLOGIES разработала электромагнитный механизм отвода фиксатора, пригодный для повторного использования, названный BRUCE. | ||||
| Области применения: | Космос, электромагнитный, механизм отвода фиксатора (pin puller). .. .. |
||||
| Статус: | Стандартный | ||||
| Актуаторы со Звуковыми Катушками (voice-coil) | |||||
| Описание: | Актуатор с подвижной катушкой (Moving coil actuator) основывается на действии силы Лапласа-Лоренца, которая прямо пропорциональна приложенному току. Они также называются звуковыми катушками (voice-coil) с тех пор, как нашли свое первое применение в динамиках. Это наиболее обычный линейный магнитный управляемый актуатор. Компания CEDRAT TECHNOLOGIES изготовила несколько актуаторов по принципу звуковой катушки для космических применений (например MTG, IASI). | ||||
| Области применения: | Высоко линейные актуаторы, Аэрокосмическая отрасль … | ||||
| Статус: | Этап оценки для космических применений | ||||
| Линейно Перемещаемый Магнит с Двумя устойчивыми состояниями (Bistable Linear Moving Magnet — BLMM) | |||||
| Описание: | Он изготовлен на основе постоянного магнита, перемещаемого между двумя разноименными электромагнитами. Это магнитный актуатор с двумя устойчивыми состояниями, обладающий высокой силой удержания при выключенном питании. Актуаторы BLMM являются миниатюрными решениями производства компании CEDRAT TECHNOLOGIES. Это магнитный актуатор с двумя устойчивыми состояниями, обладающий высокой силой удержания при выключенном питании. Актуаторы BLMM являются миниатюрными решениями производства компании CEDRAT TECHNOLOGIES. |
||||
| Области применения: | Стопорные механизмы, Генераторы вибрации, Микро-клапана.. | ||||
| Статус: | Стандартное изделие | ||||
| Технологии Магнитно-Реологических Жидкостей (Magneto Rheological Fluid — MRF) | |||||
| Описание: | На основе магнитно-Реологических Жидкостей можно построить новые решения, такие как активные клапана, автоматизированные гидростатические и гидродинамические подшипники … Компания CEDRAT TECHNOLOGIES реализовала характеристики MRF жидкостей на примере решений для механической обработки. |
||||
| Области применения: | Активные MRF клапана, автоматизированные гидростатические или гидродинамические подшипники | ||||
| Статус: | Проверка концепции | ||||
| Актуаторы на Магнитно-Реологических Жидкостях (Magneto Rheological Fluid — MRF) | |||||
| Описание: | Представленный атуатор на основе магнитно-Реологических Жидкостей является новым самоблокирующимся линейным магнитным актуатором, которому требуется очень малая электрическая мощность (менее 2 Вт) для работы с силами до 100 Н. Он подходит для создания безотказных амортизаторов и демпферов. | ||||
| Области применения: | Активные Демпферы, амортизаторы, блокирующие механизмы | ||||
| Статус: | Проверка концепции | ||||
| Актуаторы с Ограниченным Углом вращения (Limited Angle Torque Actuators- LAT) | |||||
| Описание: | Актуатор с Ограниченным Углом вращения (LAT) обеспечивает угловой поворот в пределах +/- 15°. Он обеспечивает плавное вращательное движение с высоким разрешением и высокой точностью для механизмов позиционирования для авиационных, космических и оптических применений. Он обеспечивает плавное вращательное движение с высоким разрешением и высокой точностью для механизмов позиционирования для авиационных, космических и оптических применений. |
||||
| Области применения: | Вращательное движение с высоким разрешением, Микро нано Позиционирование, Ориентирование, Сканирование | ||||
| Статус: | Прототип | ||||
| Модернизация Бесколлекторных Двигателей постоянного тока | |||||
| Описание: | Компания CEDRAT TECHNOLOGIES проводит модернизацию доступных на рынке бесколлекторных двигателей для улучшения характеристик момента и скорости и для уменьшения потребляемой мощности с заменой деталей и испытаниями на стенде для микродвигателей вращения. |
||||
| Области применения: | Бесколлекторные двигатели постоянного тока для ответственных применений: авиация и космос, БПЛА … | ||||
| Статус: | Прототип | ||||
| Однофазный Шаговый Мини Двигатели (Single Phase Stepper Mini-Motor — SPSM-1) | |||||
| Описание: |
Однофазный шаговый микро двигатель вращения обладает настраиваемым воздушным зазором между статором и ротором и плоским постоянным магнитом. Двигатель был разработан в рамках проекта FP6 M2EMS EC, в сотрудничестве с CEA и ETA. This stepping motor is compatible with Si technologies. |
||||
| Области применения: | Микродвигатели, Микротехнологии. .. .. |
||||
| Статус: | Проверка концепции | ||||
| Магнитострикционные Актуаторы | |||||
| Описание: | Магнитострикционные CEDRAT TECHNOLOGIES являются твердотельными магнитными актуаторами на основе магнитострикционного материала Терфенола-Д. Актуаторы могут быть разработаны на воспроизводство больших усилий (>20 кН) и больших величин хода (> 200 мкм) при низких напряжениях (< 12 В) в статике и динамике. | ||||
| Области применения: | Генераторы большого усилия, Низковольтные актуаторы, Звуковые трансдъюсеры (сонар) … | ||||
| Статус: | Прототип | ||||
| Линейный усилитель для магнитных актуаторов LA24 | |||||
| Описание: | Много канальный Линейный Усилитель (Linear Amplifier) LA24 обладает малым уровнем шумов, работает в широком диапазоне частот и предназначен для высокоточного управления магнитными актуаторами CEDRAT TECHNOLOGIES. |
||||
| Области применения: | Позиционирование, Стабилизация | ||||
| Статус: | Стандартное изделие | ||||
| Источник питания на основе батарей для встраиваемых актуаторов, датчиков и мехатронных систем | |||||
| Описание: | Источники питания для пьезо или магнитных актуаторов, датчиков и мехатронных систем на основе обычных литиевых полимерных батареек с напряжением 3,7 В. | ||||
| Области применения: | Встраиваемые пьезо и магнитные актуаторы, двигатели, датчики, механизмы, клапана | ||||
| Статус: | Проверка концепции | ||||
Видео 1: 3-D модель магнитнострикционного актуатора
Видео 2: Однофазный шаговый микродвигатель SPSM-1
Электромагнитные приводы
Приводы преобразуют определенный вид энергии в механическую энергию. Существуют различные классы приводов в зависимости от физического принципа, по которому происходит преобразование энергии.
Существуют различные классы приводов в зависимости от физического принципа, по которому происходит преобразование энергии.
[adsense1]
Некоторые из этих классов приводов, которые широко используются в промышленности, включают гидравлические приводы, электростатические приводы, электромагнитные приводы, приводы с тепловым расширением и пневматические приводы.
При проектировании мехатронной системы наиболее важным аспектом является выбор исполнительных механизмов, поскольку характеристики исполнительных механизмов непосредственно отражаются на кинематических характеристиках используемой системы. Эта статья в основном посвящена электромагнитным приводам, поэтому давайте подробно рассмотрим эту тему.
Краткое описание
Что такое электромагнитный привод?
Привод, работающий на основе электромагнитного принципа преобразования энергии, называется электромагнитным приводом. Электромагнитные приводы преобразуют электрическую и механическую энергию друг в друга.
Преобразование энергии происходит в так называемом воздушном зазоре, который разделяет неподвижный элемент (статор или неподвижный контакт) и подвижный элемент (ротор или подвижный контакт) привода.
[адсенс2]
Эти приводы создают силу и крутящий момент с помощью магнитного поля. Магнитные поля имеют более высокую плотность энергии по сравнению с электрическими полями, поэтому магнитные поля используются в этих датчиках.
Фундаментальными принципами электромагнитных приводов являются законы электромагнитной индукции Фарадея, сила электромагнитных сил Лоренца и закон Био-Савара. Поскольку управляющей переменной такого привода является электрический ток, подаваемый приводами силового преобразователя, ими можно легко управлять.
Они используются во многих приложениях от точного управления с использованием небольших приводов до довольно больших мощных устройств с использованием электрических приводов.
Электромагнитные датчики состоят из двух основных цепей; а именно электрическая цепь и магнитная цепь. Электрическая цепь устанавливает напряжение и ток в соответствии с законами анализа цепей, тогда как магнитная цепь устанавливает магнитный поток и напряженность магнитного поля.
Электрическая цепь устанавливает напряжение и ток в соответствии с законами анализа цепей, тогда как магнитная цепь устанавливает магнитный поток и напряженность магнитного поля.
В присутствии магнитного поля существует магнитный поток Φ. Плотность магнитного потока B ̅ и напряженность магнитного поля H ̅ связаны проницаемостью материала. В вакууме плотность магнитного потока пропорциональна напряженности магнитного поля и определяется как
B‾ = µo H ̅
Где µo – константа проницаемости, значение которой равно 4π × 10-7. Для ферромагнитных материалов это соотношение задается как
B ̅ = µr H ̅ . µo H ̅
Где µr H ̅ – относительная проницаемость материала. С помощью кривых B-H анализируется зависимость проницаемости (µr) материала от H ̅.
Закон Лоренца гласит, что когда проводник с током помещается в магнитное поле, на него действует сила. Если в проводнике длиной L течет ток i при наличии магнитной индукции B ̅, то опытные
Сила Лоренца задается как
F ̅ = i L ̅ × B ̅
Большинство случаев B ̅ и L ̅ ортогональны, и, рассматривая F ̅ ортогонально B ̅ и L ̅, приведенное выше уравнение может быть записано as
F = B L i
Движение проводника в магнитном поле создает электромагнитную силу (ЭДС) на проводнике. Это называется законом электромагнитной индукции или законом Фарадея. Согласно этому закону ЭДС индукции в замкнутом контуре равна скорости изменения магнитного потока через контур.
Это называется законом электромагнитной индукции или законом Фарадея. Согласно этому закону ЭДС индукции в замкнутом контуре равна скорости изменения магнитного потока через контур.
Следовательно, e = – dΦ/dt
А закон Био-Савара описывает плотность магнитного потока, создаваемого электрическим током, и для длинного прямого проводника на перпендикулярном расстоянии r она определяется как
B = (µo µr i) / (2πr)
Это три важных закона, которые действуют как фундаментальные принципы электромагнитных приводов.
Различные приводы на основе электромагнитного поля
Во многих областях, таких как автомобилестроение, промышленная автоматизация, системы защиты, используются различные типы приводов в зависимости от нескольких факторов, таких как размер, тип необходимого срабатывания, надежность, экономичность и т. д. Некоторые из электромагнитные приводы обсуждаются ниже.
1. Электрические двигатели
Электродвигатель является более универсальным и широко используемым электромагнитным приводом для широкого применения.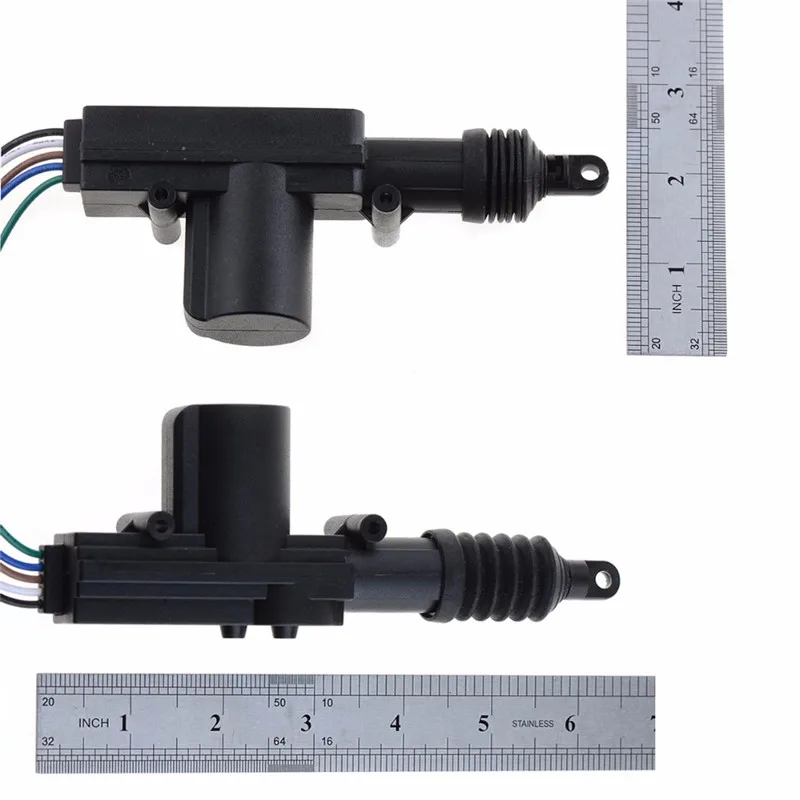 Электродвигатель преобразует электрическую энергию в механическую. Он состоит из двух частей: неподвижного статора и вращающегося ротора.
Электродвигатель преобразует электрическую энергию в механическую. Он состоит из двух частей: неподвижного статора и вращающегося ротора.
Когда неподвижный статор возбуждается магнитным полем, ротор с током начинает вращаться по принципу силы Лоренца. Они классифицируются либо по электромагнитным характеристикам, либо по функциональным возможностям. Классификация приводов этого типа приведена ниже.
Электрические двигатели- В зависимости от источника питания электрические двигатели классифицируются как двигатели постоянного и переменного тока. Двигатели постоянного тока возбуждаются источником постоянного тока и подразделяются на два основных типа: двигатели с независимым возбуждением и двигатели с самовозбуждением. Двигатели с самовозбуждением снова подразделяются на двигатели с параллельным возбуждением, с последовательным возбуждением и со смешанным возбуждением. Эти двигатели легко управляются умеренными приводами. А также эти двигатели доступны по сниженным ценам по сравнению с двигателями переменного тока.

- Двигатели переменного тока поставляются с питанием от сети переменного тока и подразделяются в основном на однофазные и трехфазные двигатели.
- Однофазные двигатели могут быть асинхронными или синхронными. Однофазный асинхронный двигатель состоит из одной обмотки статора с короткозамкнутым ротором и не является самозапускающимся двигателем. Крутящий момент создается за счет электромагнитной индукции между статором и ротором. Скорость вращения ротора несколько меньше, чем вращающееся поле статора. Однофазные синхронные двигатели состоят либо из ротора с постоянными магнитами, либо из обмотки ротора с контактным кольцом. В этих двигателях скорость вращения ротора синхронизирована с частотой источника питания.
- Многофазные или трехфазные двигатели также могут быть асинхронными или синхронными двигателями. Они похожи на однофазные асинхронные двигатели, но имеют несколько обмоток на статоре. Это самозапускающиеся двигатели. Трехфазные синхронные двигатели состоят из нескольких обмоток на статоре и работают аналогично однофазным синхронным двигателям.

- В зависимости от способа создания магнитного поля; Электродвигатели делятся на два типа: двигатели с постоянными магнитами и электромагнитные двигатели.
- Особый класс двигателей включает шаговые двигатели и бесщеточные двигатели постоянного тока. Шаговые двигатели снова подразделяются на двигатели с постоянным магнитом, переменным сопротивлением и гибридные двигатели. Они используются во многих электронных портативных приложениях.
2. Соленоидные приводы
Соленоиды являются простейшим распространенным электромагнитным приводом, который преобразует энергию в линейное или вращательное движение. Они используются во многих приложениях, включая переключатели конвейеров, реле, монетоприемники, механизмы электрических замков и т. д.
Соленоид состоит из сердечника из мягкого железа, заключенного в токопроводящую катушку, и ферромагнитного плунжера или якоря в центре катушки. Когда катушка с током находится под напряжением, в катушке индуцируется магнитное поле.
Это магнитное поле притягивает якорь или плунжер к центру катушки, закрывая воздушный зазор между неподвижной рамой или контактом и плунжером. Электромагнитные приводы могут быть линейного или поворотного типа.
Линейный соленоид
Из-за линейного направленного движения или действия плунжера эти соленоиды называются линейными соленоидами. Они бывают двух типов, а именно линейные соленоиды толкающего и тянущего типа.
В соленоиде тянущего типа, когда катушка находится под напряжением, она притягивает подключенную нагрузку (или плунжер) к себе, тогда как в соленоиде толкающего типа она отталкивает подключенную нагрузку от себя. Конструкция обоих этих типов одинакова, за исключением конструкции плунжера и расположения возвратной пружины.
Линейный соленоид
На приведенном выше рисунке показан соленоид тянущего типа, который тянет плунжер, когда на катушку подается питание. Когда катушка обесточена, возвратное движение обеспечивается самой нагрузкой или возвратной пружиной, являющейся неотъемлемой частью узла соленоида.
Вращающиеся соленоиды
Вращающийся соленоид преобразует линейное движение во вращательное за счет использования шарикоподшипников, которые перемещаются по наклонным дорожкам качения. Эти соленоиды производят вращательное или угловое движение либо по часовой стрелке, либо против часовой стрелки, либо в обоих направлениях из нейтрального положения.
Когда угловые перемещения, требуемые приложением, очень малы, эти соленоиды заменяют шаговые двигатели и небольшие двигатели постоянного тока.
Когда на катушку вращающегося соленоида подается питание, узел якоря или плунжера притягивается к статору. Далее он вращается по дуге, определяемой чеканкой дорожек качения.
Вращающиеся соленоиды
3. Приводы с подвижной катушкой
Эти приводы также называются приводами звуковой катушки. Это также своего рода привод лайнера, который перемещается по линии. В этом типе датчика катушка заключена в магнитный корпус, и ток возбуждения проходит через эту катушку.
Этот ток создает магнитный поток от обмоток катушки. На основе принципа силы Лоренца развивается сила, пропорциональная произведению плотности магнитного поля и силы тока. Генерируемая сила выражается как
F α N I B
Где
N — число витков в обмотке,
I — ток, протекающий через обмотку, а
B — плотность магнитного потока.
Эти типы приводов бывают двух форм: цилиндрической и прямоугольной. Наличие шестерен в его конструкции обуславливает простоту конструкции. Они используются во многих промышленных, медицинских и автомобильных приложениях, а некоторые из конкретных применений включают в себя зеркала с управляемым лучом, управление пилотным клапаном, карданные узлы и т. д.
Приводы с подвижной катушкой
4. Реле
Реле представляют собой бинарные приводы, которые имеют два устойчивых состояния: заблокировано и включено или не заблокировано и обесточено. Реле – это устройство, обеспечивающее переключение между двумя электрическими цепями в ответ на управляющий сигнал.
Это может быть несколько типов, основанных на различных критериях, таких как контакт, они подразделяются на однополюсные, однонаправленные, однополюсные, двунаправленные, двухполюсные, однонаправленные и двухполюсные, двунаправленные. К другим популярным реле относятся электромагнитные реле, твердотельные реле, реле с фиксацией, поляризованные реле, герконовые реле и т. д.
РелеНа приведенном выше рисунке показано электромагнитное реле с притянутым якорем. Он состоит из неподвижных и подвижных контактов. Цепь нагрузки подключается через неподвижный контакт, тогда как силовая цепь подключается к подвижному контакту.
Цепь управления подает питание на катушку питания. Когда схема управления подает питание на катушку реле (или катушку питания), якорь притягивается к неподвижным контактам, и, следовательно, подключаются как цепи источника, так и цепи нагрузки. Когда питание на катушку не подается, реле обесточивается.
Реле в основном используются в качестве защитного устройства для связанного с ним оборудования. Кроме того, базовая функция реле требуется во многих приложениях, таких как телекоммуникации, бытовая техника, автомобили, промышленный контроль, управление электронным оборудованием и т. д. Микроэлектромеханические системы) технология преобразования электрической энергии в механическую с использованием принципа уравнения силы Лоренца.
Кроме того, базовая функция реле требуется во многих приложениях, таких как телекоммуникации, бытовая техника, автомобили, промышленный контроль, управление электронным оборудованием и т. д. Микроэлектромеханические системы) технология преобразования электрической энергии в механическую с использованием принципа уравнения силы Лоренца.
Магнитный привод на основе МЭМС производит новый класс микроустройств, которые изготавливаются с использованием методов микрообработки с большим потенциалом и приложениями.
Эти устройства основаны на магнитных или электромагнитных взаимодействиях между магнитными материалами и электромагнитными катушками или источниками магнитных полей, такими как постоянные магниты. Но основной проблемой для устройств этого типа является интеграция магнита в устройство MEMS.
Это связано с тем, что очень сложно изготовить трехмерные катушки с помощью МЭМС. Хотя были предприняты попытки изготовить магнитный привод в микромасштабе с катушками, соединенными проволокой, очень часто магнитные приводы MEMS конкурируют с электростатическими устройствами.
Эта платформа магнитных приводов МЭМС была разработана для широкого спектра возможных применений, включая переключатели, реле, клапаны, резонаторы, оптические переключатели и т. д.
1. Переключатели МЭМС
Переключатели МЭМС отличаются от твердотельных диоды и полевые транзисторы, хотя цель прерывания тока та же.
МЭМС-переключатели состоят из механических подвижных частей, позволяющих изменять расстояние между двумя проводящими элементами сигнальной линии, чтобы замыкать или размыкать омический контакт в случае омических переключателей, тогда как в случае емкостных переключателей он увеличивает или уменьшает внутреннюю емкость . На рисунке ниже показан принцип переключения омических и емкостных устройств.
Они состоят из электрического элемента и секции активации, которые можно разделить на категории в зависимости от схемы активации, такой как магнитостатическая, электростатическая, тепловая или пьезоэлектрическая, электрической конфигурации, такой как емкостные или омические контактные переключатели, шунтирующие или последовательные архитектуры цепей, геометрической конфигурации, такой как горизонтальное или вертикальное срабатывание, мембраны, балки, консоли и т. д.
д.
Эти переключатели обеспечивают низкое энергопотребление и более высокую изоляцию в выключенном состоянии для высокочастотного переключения по сравнению с полупроводниковыми переключающими устройствами. Но у них проблемы с низкой скоростью и надежностью.
2. Реле MEMS
Основное действие реле заключается в включении или выключении таким образом, чтобы они могли замыкать или размыкать цепь. Реле MEMS представляют собой миниатюрные механические реле, изготовленные на основе технологии MEMS.
Желательными характеристиками МЭМС-реле являются хорошие характеристики во включенном и выключенном состояниях, зазор между контактами должен быть минимальным, низкое контактное сопротивление, большое остаточное напряжение, когда реле находится в выключенном состоянии, и скорость переключения должна быть высокой.
Однако конструкция этих устройств более сложна из-за трехмерной природы магнитной катушки, которая не подходит для изготовления МЭМС. Для производства реле MEMS были предприняты передовые шаги, такие как литографические методы, что привело к тому, что нескольким группам удалось разработать электромагнитные реле MEMS.
Из-за высокой сложности производства перспективы успеха коммерческих реле неясны. Но для микрорелейных технологий используются электростатические или электротермические принципы срабатывания.
МЭМС-реле
В МЭМС-реле с механизмом электростатического привода две изолированные проводящие пластины разделены небольшим воздушным зазором, который можно привести в контакт, подав на них достаточное напряжение. Релейное действие осуществляется путем размещения подходящих проводников и контактов на движущихся частях.
Электростатическая сила изменяется пропорционально квадрату электрического поля, создаваемого в приводе, и рабочее напряжение увеличивается линейно с увеличением расстояния.
Это основная трудность при проектировании реле с электростатическим управлением, поскольку трудно достичь разумных зазоров между контактами при поддержании напряжения срабатывания в реалистичном диапазоне.
Электромагнитные приводы в мехатронике | Блог системного анализа
Ключевые выводы
-
Привод принимает управляющий сигнал и реагирует на него, преобразовывая этот сигнал в управляемую механическую энергию.

-
Электромагнитный привод работает по принципу электромагнетизма и преобразует электрическую энергию в механическую и наоборот.
-
Электромагнитные приводы надежны и прочны, просты в изготовлении и массовом производстве и легко интегрируются в мехатронные системы.
Электромагнитные приводы и датчики широко распространены в большинстве мехатронных систем
Мехатроника — это междисциплинарная отрасль техники, которая способствовала развитию современных технологий. Системы, которые сочетают в себе электрические, электронные и машиностроительные приложения, относятся к категории мехатроники. Электромагнитные приводы и датчики являются двумя важными компонентами большинства мехатронных систем.
Давайте подробнее рассмотрим мехатронные системы и роль в них приводов.
Приводы
Приводы представляют собой устройства, используемые для преобразования управляющего сигнала в управляемую механическую энергию. Существуют различные типы приводов, которые классифицируются по тому, как они обеспечивают преобразование энергии. Типы приводов, которые обычно используются в промышленных и коммерческих целях:
- Гидравлические приводы
- Пневматические приводы
- Термоприводы
- Электростатические приводы
- Электромагнитные приводы
Приводы — это просто преобразователи энергии, и в зависимости от количества входного сигнала или количества срабатывания каждый привод, упомянутый выше, отличается друг от друга. Воздействующей величиной в ТРД является температура, в магнитострикционном — напряжение, в пьезоэлектрическом — заряд, в электромагнитном — ток.
Электромагнитные приводы
Электромагнитные приводы работают по принципу электромагнетизма.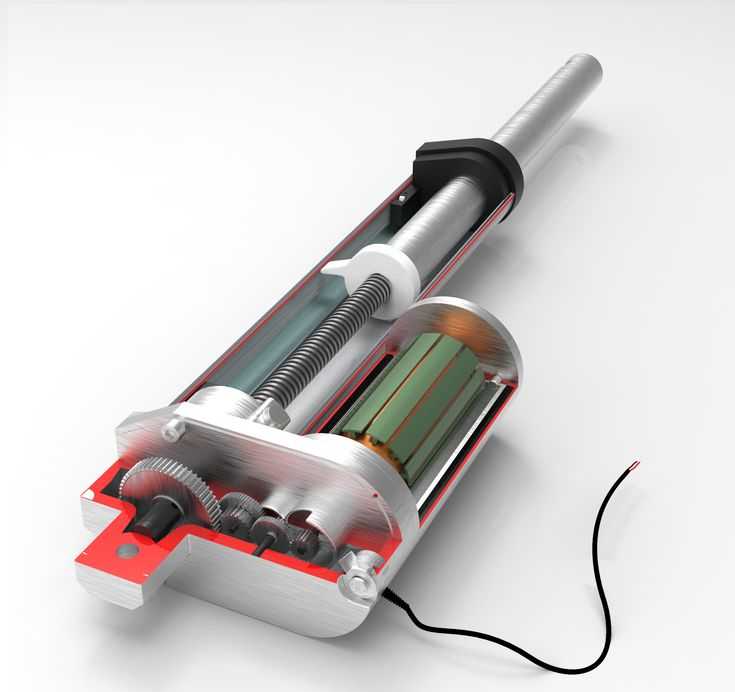 Энергия преобразуется из электрической в механическую и наоборот. Электрический ток служит управляющей величиной в электромагнитных приводах.
Энергия преобразуется из электрической в механическую и наоборот. Электрический ток служит управляющей величиной в электромагнитных приводах.
Основными законами электромагнитных приводов являются:
- Законы электромагнитной индукции Фарадея.
- Сила Лоренца электромагнитных сил.
- Закон Био-Савара.
Преимущества электромагнитных приводов
- Надежная и прочная работа.
- Простота производства и массовое производство.
- Простая интеграция в мехатронные системы.
- Совместимость с суровыми условиями, такими как высокие температуры или вакуум.
- Высокая плотность силы и ускорение.
Электромагнитные приводы в автоматических выключателях
Защитные реле в автоматических выключателях являются классическим примером электромагнитных приводов. Защитное реле обнаруживает неисправности и позволяет автомату защиты изолировать остальную часть цепи от неисправности. Эти реле подразделяются на два типа в зависимости от использования.
Защитное реле обнаруживает неисправности и позволяет автомату защиты изолировать остальную часть цепи от неисправности. Эти реле подразделяются на два типа в зависимости от использования.
Реле электромагнитного притяжения — Реле электромагнитного притяжения подразделяются на реле с притягивающим якорем, соленоидные реле и реле балансного луча. Управляющие величины реле электромагнитного притяжения могут быть как переменного, так и постоянного тока.
Реле электромагнитной индукции — Любые реле, использующие электромагнитную индукцию, относятся к этому типу реле. Величины переменного тока используются для приведения в действие электромагнитных индукционных реле.
Электромагнитные реле
В соленоидном реле используется соленоид и подвижный железный плунжер для управления автоматическим выключателем. Плунжер, притянутый к катушке реле или соленоиду, действует по принципу электромагнитного притяжения.
В исправном состоянии цепи ток через катушку реле (соленоид) меньше значения срабатывания. Это приводит к тому, что поршень удерживается под действием силы тяжести или пружины. Нижнее положение плунжера не пропускает ток через катушку отключения, поэтому автоматический выключатель остается во включенном положении. Однако при неисправных условиях автоматический выключатель размыкается.
В условиях неисправности по току большой ток, протекающий по цепи, делает ток, протекающий через катушку реле, больше значения срабатывания. В результате плунжер притягивается к катушке реле, и это движение вверх позволяет току проходить через катушку отключения. Когда катушка отключения находится под напряжением, автоматический выключатель размыкается.
Проектирование мехатронной системы
При проектировании мехатронной системы практически невозможно обойтись без приводов. Если приводной величиной в системе является электрический ток, то предпочтительным приводом будет электромагнитный привод.
